
Проектирование системы управления вентиляции на базе Arduino в среде CoDeSeSys
Please use this identifier to cite or link to this item: http://earchive.tpu.ru/handle/11683/54549
| Title: | Проектирование системы управления вентиляции на базе Arduino в среде CoDeSeSys |
| Authors: | Шабо, Андрей Камил |
| metadata.dc.contributor.advisor: | Шилин, Александр Анатольевич |
| Keywords: | система управления винтиляцией; ПИД регулятор; управление; ПЛК; автоматизация; Ventilation Control System; PID Controller; CoDeSys; PLC; automation |
| Issue Date: | 2019 |
| Citation: | Шабо А. К. Проектирование системы управления вентиляции на базе Arduino в среде CoDeSeSys : бакалаврская работа / А. К. Шабо ; Национальный исследовательский Томский политехнический университет (ТПУ), Инженерная школа энергетики (ИШЭ), Отделение электроэнергетики и электротехники (ОЭЭ) ; науч.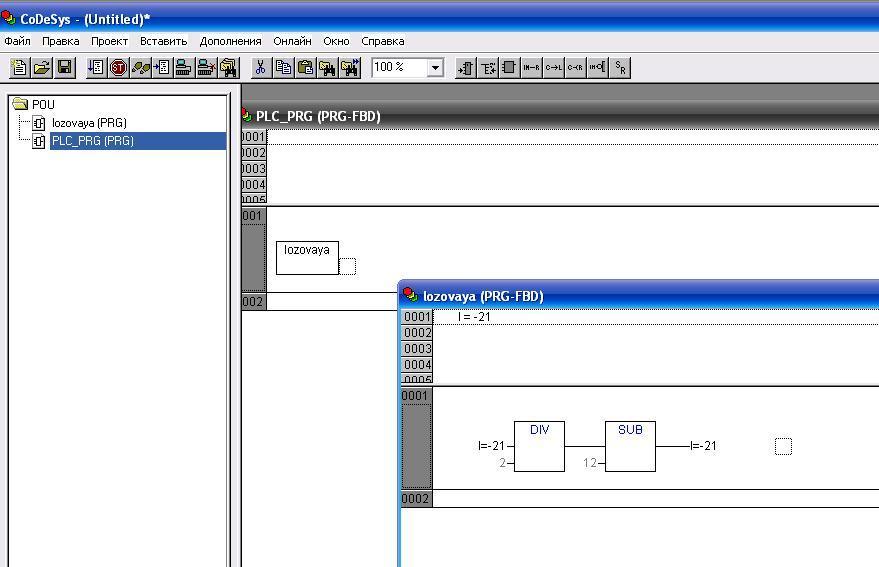 |
| Abstract: | В данной дипломной работе была собрана систему управления вентиляцией на базе Arduino в среде CoDeSys
В процессе работы был реализован ПИД регулятор по переходным процессам объекта (нагревателя). Параметры регулирования были найдены двумя способами, также была прописана подробная пользовательская инструкция по нахождению параметров и дальнейшей реализации регулятора в функциональных блоках среды CoDeSys. Далее регулятор был подключен к реальному объекту, где поддерживалось заданное значение температуры. Весь этот процесс был показан н реализован дополнительно в визуализации в среде CoDeSys. In this Bachelor’s thesis, a ventilation control system was built on Arduino in CoDeSys. during the project a PID controller was calculated based on transition mood of the object (heating system). Control parameters were calculated in two different methods. Besides, a full instruction was written for users on how to implement PID controller using function blocks in CoDeSys.  After that, the controller was connected to the real object where it maintained reference temperature. In addition, all this process was visualized in CoDeSys. After that, the controller was connected to the real object where it maintained reference temperature. In addition, all this process was visualized in CoDeSys. |
| URI: | http://earchive.tpu.ru/handle/11683/54549 |
| Appears in Collections: | Выпускные квалификационные работы (ВКР) |
Items in DSpace are protected by copyright, with all rights reserved, unless otherwise indicated.
| ???itemlist.dc.date.accessioned??? | Title | Author(s) |
|---|---|---|
| 14-May-2021 | Analysis of financial and economic activities on the example of an enterprise (Анализ финансово-хозяйственной деятельности на примере предприятия) | Хамидова, Фарангис Абдукаримовна |
| 28-Apr-2021 | Разработка программы повышения финансовой устойчивости предприятия | Канышева, Валерия Николаевна |
| 23-Apr-2021 | Разработка маркетинговой стратегии предприятия | Кургинян, Виктория Ивановна |
| 23-Apr-2021 | Анализ эффективного применения технологий доизвлечения запасов углеводородов из низкопроницаемых коллекторов в процессе разработки месторождений | Белов, Тимур Владимирович |
| 23-Apr-2021 | Определение закономерностей изменения газового фактора при разработке нефтяных месторождений Западной Сибири | Никонова, Карина Станиславовна |
| 13-Apr-2021 | Анализ практики налоговых споров и тенденции спорных ситуаций в налоговой сфере | Ахмадеева, Алена Тагировна |
| 12-Apr-2021 | Analysis of the financial and economic activities of a manufacturing enterprise (Анализ финансово-хозяйственной деятельности производственного предприятия) | Андрияшевский, Николай Николаевич |
| 9-Feb-2021 | Программная реализация алгоритма определения максимальных нагрузочных режимов для отстройки дистанционной релейной защиты | Бахтеев, Максим Константинович |
| 27-Jan-2021 | Установка для определения тепловых свойств твердых тел с использованием радиационного нагрева | Чан, Дык Хиеу |
| 27-Jan-2021 | Проект энергоблока АЭС с реактором типа ВВЭР электрической мощностью 1500 МВт | Ле, Хуи Чи |
| 22-Jan-2021 | Проект энергоблока атомной электрической станции мощностью 1200 МВт с двумя турбинами типа К-600-23,5 | Ибрагим, Ахмед Атэф Эльсайед Ахмед |
| 22-Jan-2021 | Экспериментальные исследования способов высокотемпературной термической утилизации отработавшего радиоактивного графита | Аникин, Олег Владимирович |
| 20-Jan-2021 | Механизация очистных работ на базе комплекса КМКЮ 2У-16/32. Оснащение консолей штрековых секций крепи МКЮ2Ш.79 выдвижными бортами Оснащение консолей штрековых секций крепи МКЮ2Ш.79 выдвижными бортами | Садырбек уулу, Жакшылык |
| 19-Jan-2021 | Установка для измерения коэффициента теплопроводности материалов | Данг, Куок Ань |
| 19-Jan-2021 | Разработка основ метода получения оксида олова, легированного сурьмой | Марченко, Виктор Олегович |
| 18-Jan-2021 | Установка для измерения интегральной степени черноты калориметрическим методом | Чау, Тхань Ньан |
| 18-Jan-2021 | Установка для определения тепловых свойств твердых тел с использованием радиационного нагрева | Чан, Дык Хиеу |
| 18-Jan-2021 | Проект участка волоксидации облученного ядерного топлива производительностью 100 тонн в год | Шутова, Софья Константиновна |
| 18-Jan-2021 | Проект участка производства электролитического медного порошка производительностью 80 тонн медного порошка в год | Кравцов, Даниил Олегович |
| 18-Jan-2021 | Проект энергоблока АЭС электрической мощностью 700 МВт | Берикболов, Нурмухамед Сылкымович |
6/2/2016 33 Комментарии
Raspberry Pi — мегапопулярный бюджетный микрокомпьютер, детище британской магии. Сам микрокомпьютер продаётся в любой темной подворотне и на Алиэкспрессе. Девайс у меня полгода. Использовал его для тестирования функций CODESYS 3.5, но сейчас задумал применить на реальном объекте. PS. Если изучаете третий CODESYS — смело покупайте Raspberry. На симуляторе далеко не уедешь, а обычные ПЛК дороговаты. Требования к ПЛК Я разрабатываю автоматику для тепловых насосов Ovanter, да и вообще автоматизирую отопление в частных домах. В зависимости от бюджета используем ОВЕН ПЛК63 или Berghof (ECC2100 или DC2007). Последний — немецкий и дорогой, программируется в CODESYS 3.5. С рублём беда, поэтому решил продумать дешевую альтернативу в виде Raspberry (буду именовать «Малиной»), под которую подойдёт программный код от Berghof.  Но всплывают вопросы функциональности и надежности. Полноценно проверить последнее возможно только на реальном объекте. А для начала придется разобраться с необходимыми функциями: Но всплывают вопросы функциональности и надежности. Полноценно проверить последнее возможно только на реальном объекте. А для начала придется разобраться с необходимыми функциями:
В сокращении: DI DO AI AO RS-485 Modbus WEB Retain RTC E-mail? SMS? 433Mhz? EnOcean? Набор тривиальный, и хочется всё сделать бюджетненько.
Всё! Мы превратили Малину в CODESYS-ПЛК. Создадим тестовый программный проект и зальём в новоиспеченный контроллер.
Создадим новый стандартный проект. Выберем устройство и расово верный язык программирования. Через несколько секунд создастся проект. Слева найдите пункт «GPOIs …», кликните правой кнопкой и нажмите Update Device. Выберите «GPIOs B+/PI2». Сейчас оно нам не пригодится, но для порядка поменяем. Кликнем два раза на PLC_PRG (PRG) и напишем заветный код. На левой панели кликните два раза на Device (CODESYS … . На правой панели появится содержимое данной вкладки. Нажмите Scan network… и в появившемся списке выберите свою Малину (у моей имя «Barer», по умолчанию «Raspberry»).Если Малина не нашлась — вбейте её IP-адрес вручную в поле под картинкой устройства (на моем скриншоте там стоит «ZEN» — имя моего ПК). Нажмите Enter и CODESYS найдет Малину по IP. Теперь подключимся к Малине. Нажмем Online > Login (или Alt+F8, или на значок Login). Перейдем в PLC_PRG и увидим внизу, что программа в режиме «STOP». Жмем Debug > Start, или просто F5. Видим, что ПЛК начал свою работу по увеличению икса. А вы не верили! Можем зайти в MainTask уменьшить время цикла ПЛК чтобы инкрементирование проходило быстрее. В Task Configuration > Monitor видно всю статистику по интервалам выполнения цикла.
|


 Подробное описание установки.
Подробное описание установки.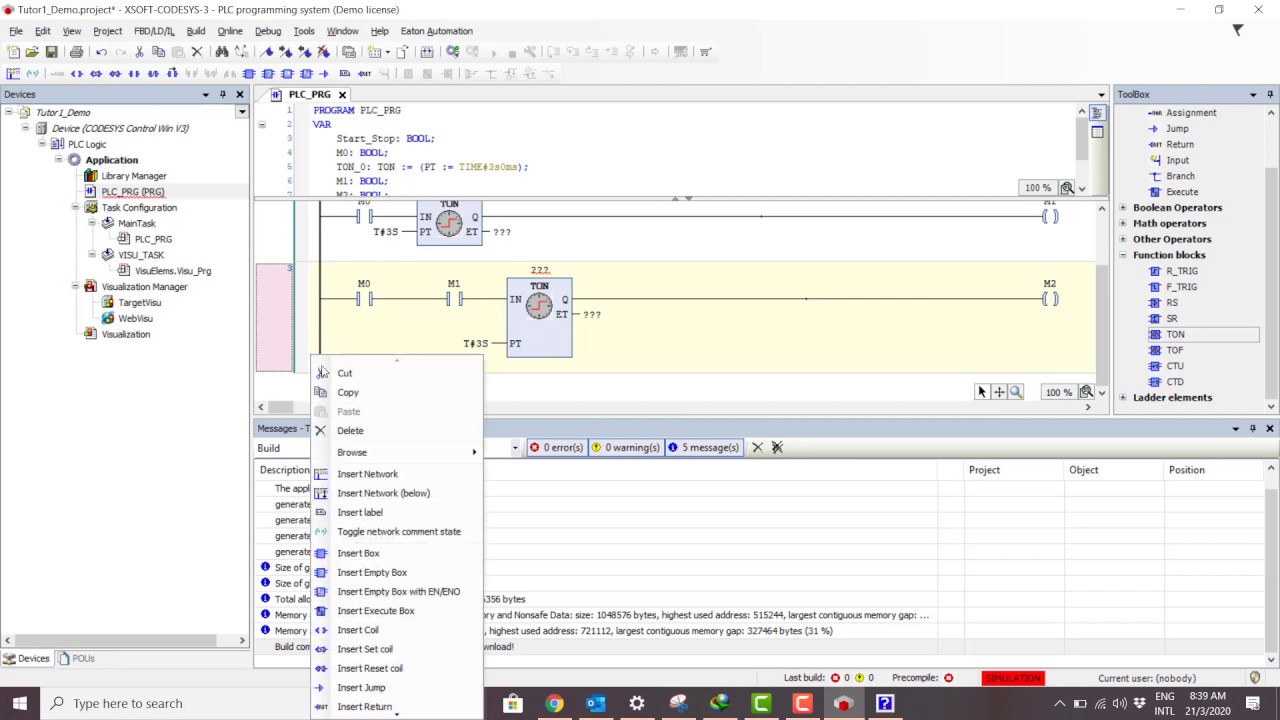 File > New Project
File > New Project

Codesys arduino 🗝
Add the following snippet to your HTML:. Read up about this project on. You can read more about this and other Esmacat tutorials on the official Esmacat website. Check out our other Hackster. Detailed documentation of the codes and steps for this tutorial can be found here. This shield allows high-speed communication with an industry-standard EtherCAT protocol for high-performance robotic applications. Esmacat’s simple to use Arduino and Mbed libraries allow for easy coding on the base board and Esmacat’s free open source master software has a high-level abstraction so users can run applications within minutes!
Raspberry Pi is a tiny, dual-display, low-cost desktop computer that is used widely in robot brains, smart home hubs, media centers, as a networked AI core and factory controllers. However, it should be noted that the Pi is a Linux based computer. Suggested Reading: Section 4. For this tutorial, the following packages must be downloaded from the links below. Note: You must create a Codesys account in order to download the above files. Refer to the documentation section 3.
However, it should be noted that the Pi is a Linux based computer. Suggested Reading: Section 4. For this tutorial, the following packages must be downloaded from the links below. Note: You must create a Codesys account in order to download the above files. Refer to the documentation section 3.
Suggested Reading : Section 3. The connections are as shown in the two schematics attached in the ” Schematics ” section of this tutorial. The link to the library has been included under the Code section. ZIP library and select the file to get started with the coding part. Open the Codesys software and import the. Open the Arduino IDE and create a new sketch file.
When running the master code you get a result similar to the following on the Codesys environment with a graphical UI showing the update of registers in EASE. By now you have successfully programmed the Arduino boards and the Esmacat master! Final Notes : A detailed step by step tutorial for this project can be found in the document attached below.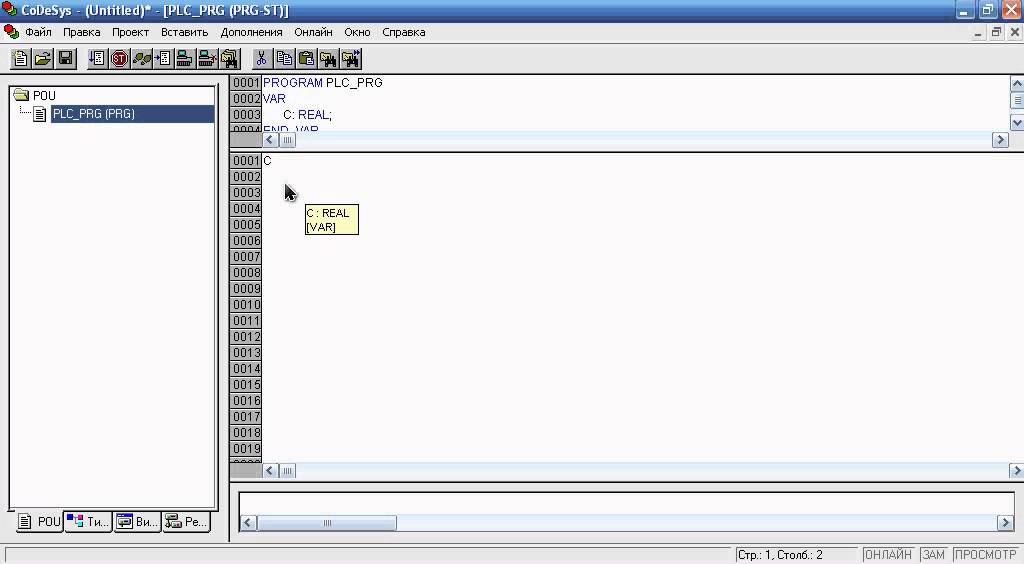
Log in Sign up. Beginner Protip 1 hour 1, Things used in this project. First, some general information about Raspberry Pi and Codesys is discussed. Physical Hardware Connection schematic hardware setup after final connections.
Hardware Setup Schematic Schematic of the connection used in the tutorial. Code to be run on Raspberry Pi using codesys. Esmacat is an easy yet powerful EtherCAT solution for robotics.
Follow Contact Contact. Related channels and tags automation embedded shield. Raspberry Pi 4 Model B.Matching the IEC standard it supports all standard programming languages but also allows including C-routines and supports object orientated programming. In combination with the CoDeSys SP runtime system it allows multi-device and multi-application programming.
Mark singlarYou can also test your application program when the PLC is not connected. This is possible thanks to the integrated offline simulation. The Simple Graph application is a Labview program that uses the Labview Arduino Driver LArVa to gather between 1 and 6 channels from your Arduino microcontroller and display them on a graph.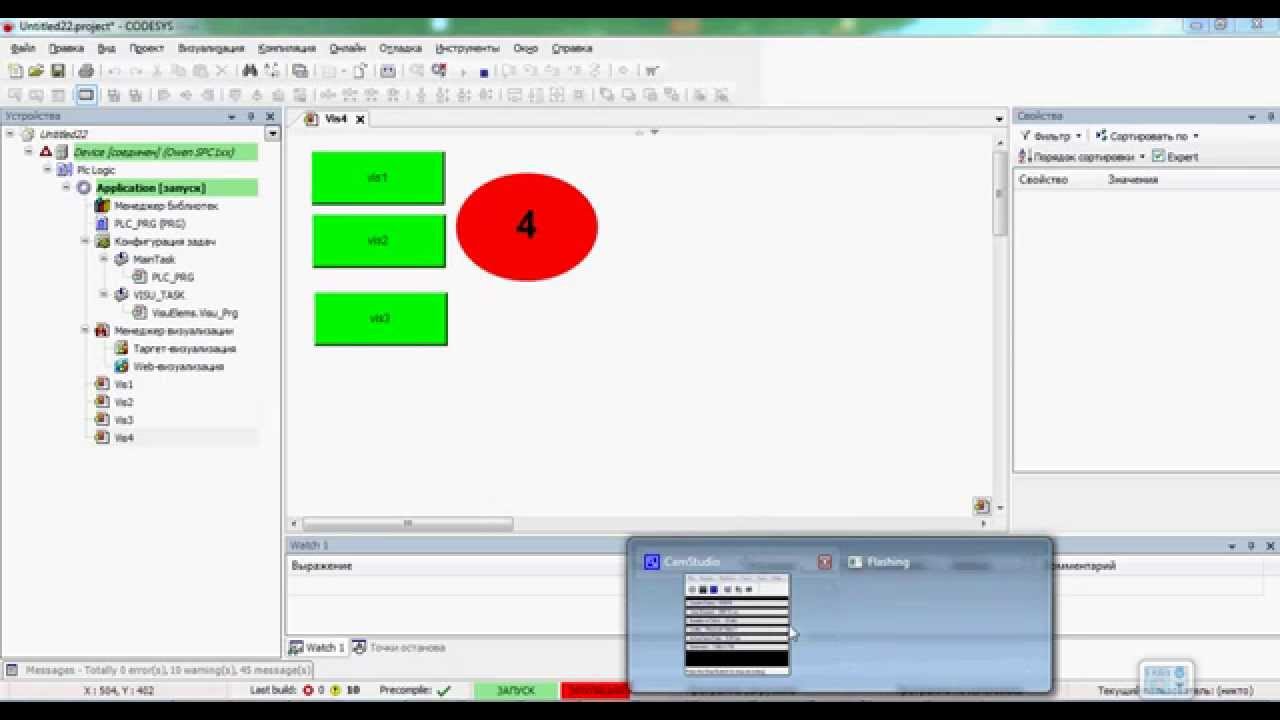 The program allows you to save the raw data and access the full capabilities of the LArVa driver, such as variable acquisition rates and on-board firmware averaging.
The program allows you to save the raw data and access the full capabilities of the LArVa driver, such as variable acquisition rates and on-board firmware averaging.
It is a robotic programming language for educational robotics and competitions. MariaMole is an open-source development environment for Arduino controllers. MariaMole makes it easier to import existing Arduino sketches, import Arduino libraries, and create new projects from examples.
Embrio is a real-time visual development tool for Arduino programming. With a live connection to your Arduino, you can see how your program works as you build it. Visuino is a visual programming tool for Arduino boards. It can be used by those who need to quickly develop applications without learning programming.
Arduino is a rich Integrated Development Editor that comes packed with numerous features that allow users to write, compile, and upload their code. With this IDE you can search which board you are using and which libraries you want to link and the program will do the rest. This package provides the HP Active Support Library for the supported notebook models and operating systems. The HP Active Support Library is a collection of tools that enables customers to discover, use, troubleshoot, and diagnose issues with their computers.
This package provides the HP Active Support Library for the supported notebook models and operating systems. The HP Active Support Library is a collection of tools that enables customers to discover, use, troubleshoot, and diagnose issues with their computers.
Arduino to Visual Studio converter is a program that will make coding for Arduino easier and faster for people used to Visual Studio IDE with true autocomplete feature. First you have to install this library for other products to work properly in the desired environment. The library and utility is available for a great set of products.Add the following snippet to your HTML:.
You can read more about this and other Esmacat tutorials on the official Esmacat website. Check out our other Hackster. Detailed documentation of the codes and steps for this tutorial can be found here. This shield allows high-speed communication with an industry-standard EtherCAT protocol for high-performance robotic applications. Esmacat’s simple to use Arduino and Mbed libraries allow for easy coding on the base board and Esmacat’s free open source master software has a high-level abstraction so users can run applications within minutes!
Raspberry Pi is a tiny, dual-display, low-cost desktop computer that is used widely in robot brains, smart home hubs, media centers, as a networked AI core and factory controllers. However, it should be noted that the Pi is a Linux based computer. Suggested Reading: Section 4.
However, it should be noted that the Pi is a Linux based computer. Suggested Reading: Section 4.
For this tutorial, the following packages must be downloaded from the links below. Note: You must create a Codesys account in order to download the above files. Refer to the documentation section 3.
Suggested Reading : Section 3. The connections are as shown in the two schematics attached in the ” Schematics ” section of this tutorial. Note: Make sure the Ethernet connections are fit tightly into the sockets.
Raspberry Pi with Codesys PLC UI Controlling an Arduino
Loose connections may lead to the slave device not being recognized. The link to the library has been included under the Code section. ZIP library and select the file to get started with the coding part.
Open the Codesys software and import the. Open the Arduino IDE and create a new sketch file.Add the following snippet to your HTML:. You can read more about this and other Esmacat tutorials on the official Esmacat website.
Check out our other Hackster. Detailed documentation of the codes and steps for this tutorial can be found here. This shield allows high-speed communication with an industry-standard EtherCAT protocol for high-performance robotic applications. Esmacat’s simple to use Arduino and Mbed libraries allow for easy coding on the base board and Esmacat’s free open source master software has a high-level abstraction so users can run applications within minutes!
Raspberry Pi is a tiny, dual-display, low-cost desktop computer that is used widely in robot brains, smart home hubs, media centers, as a networked AI core and factory controllers. However, it should be noted that the Pi is a Linux based computer. Suggested Reading: Section 4. Note: You must create a Codesys account in order to download the above files. Refer to the documentation section 3. Suggested Reading : Section 3. The connections are as shown in the two schematics attached in the ” Schematics ” section of this tutorial.
The link to the library has been included under the Code section. ZIP library and select the file to get started with the coding part. Open the Codesys software and import the.
Open the Arduino IDE and create a new sketch file. When running the master code you get a result similar to the following on the Codesys environment with a graphical UI showing the update of registers in EASE. By now you have successfully programmed the Arduino boards and the Esmacat master! Final Notes : A detailed step by step tutorial for this project can be found in the document attached below.
Please log in or sign up to comment. Program an Arduino from your Raspberry Pi? It’s possible, and super easy!
Wpf listview vs listboxProject tutorial by David Escobar. Avoid SD card corruption on a non-responsive RPi using an Arduino to log into the serial console and restart your RPi from the root account. Project tutorial by Anurag S. Sign In. My dashboard Add project. First, some general information about Raspberry Pi and Codesys is discussed. EASE connecting multiple boards. Codesys Logo.
EASE connecting multiple boards. Codesys Logo.
Master Code Execution. Physical Hardware Connection schematic Download. Hardware Setup Schematic Download.
7. Программа имитации работы схемы в CoDeSysAuthor Esmacat 6 projects 4 followers Follow.This example shows how to use the serial port. Therefore the communication of two ports with each other is implemented. The first one writes a string of characters, which is read by the second one. This example demonstrates how serial communication can be implemented, how ports are opened, closed and information is read and send. A second example shows the usage of the library SysCom. Only registered users can write reviews.
Please, log in or register. JavaScript seem to be disabled in your browser. You must have JavaScript enabled in your browser to utilize the functionality of this website.
Programming Raspberry Pi With CODESYS
Serial COM Example. Serial COM Example This example demonstrates how serial communication can be implemented, how ports are opened, closed and information is read and send. Write Your Own Review Only registered users can write reviews. The shopping cart has not yet been released for use because the automated address entry check was not successful.
Please start the request for manual activation of your account via ” My question “. Order now. Decline Accept. Get started. Third-party supplier Contact Privacy Imprint. We accept:. This website use cookies.
We use cookies to personalize content and analyze traffic to our website. More information. I agree!The Industrial application made the PLC systems being very expensive, both to buy and repair, and also because of the highly specific skills requested to software designers to extract the maximum potentials from controllers.
To turn Arduino into a Programmable Logic Controller, there are two approaches. The first one is to write our program using KOP language ladder. As an example to understand how to take full advantage of the two methods described above, we will try to solve a problem of home automation found on the web: automate electric sunshades.
Then we will proceed with a step-by-step explanation of the two methods described above. Briefly, we want to control the sunshades so that in case of a strong wind they must be automatically retracted, while unrolled only after the wind has calmed down. The behavior should be similar for the different lighting situations: roll them during the night and unroll on daylight, but obviously the wind conditions should prevail over the lighting.
As a possible solution we could use a real PLC, but given the simplicity of the algorithm and the high cost of that PLC, we will use the hardware shown above.
In addition, we will have to adapt and change the power scheme of the sunshades engines so that Arduino could manage them. Once downloaded and saved to your desktop, just double click on the LDmicro icon. Now, before proceeding with the application of ladder diagram, we have to write a draft of the program that we want to create. Since the program is very simple and we use few variables only, we can use the most basic and immediate programming approach for the PLC: the wired logic.
This methodology consists of simple Boolean equations that will always return as output after the equal sign a value that can be 0 or 1.
The software adds this letter automatically during the coding. Once declared the variables, we can proceed on writing the logic equations, taking into account that Arduino with our shield reads all inputs as HIGH 1 when the contact is open and LOW 0 when the contact is closed: therefore we must negate the logic of all the inputs to ensure that they are properly executed. Now that we have our Boolean equations, we can back to LDmicro.
By doing this we have added two more contacts, in series with the two parallel previous ones.
Now we need to modify all contact names accordingly to those used in the equations. To do this we simply double click on the first Xnew contact we have created, then we set the name and contact type in the pop-up shell. Then we need one-step further.
Open the ladder. Copy and paste this code to a new notepad file, saving it with the following parameters:. In this file, we have to declare the names of our variables and the respective pins. This step may also be skipped but we do not guarantee proper operation of the program without. The changes to this file are closely related to our project and must be consistent with the ladder.
Now we can move our four files 1. Now, type the following code, which is valid for all projects similar to this:. We should get a positive result, if not please follow again the instructions above systematically.
Now you just have to interface your system, respecting the logic that we have established for inputs and outputs. In case you want to keep it, just rename it and save it in another directory.It will cover quite a bit however I have structured it so hopefully you can pick and choose what you wish to do.
This instructable will not cover in depth how to actually program using the IEC standard languages, beyond some essentials of getting it moving, it focuses more on the hardware setup.
If you want to learn more about this, I suggest visiting YouTube where you will find some good videos there. If you get any problems with the sample programs I have uploaded, please give me a shout in the comments and I may be able to help. I would like to thank Kurt Braun however of whose video I watched provided me the inspiration to try it out myself. Did you use this instructable in your classroom?
Add a Teacher Note to share how you incorporated it into your lesson. With the above you can play around with the system and control the GPIO.
Ig opds fuse meaningHowever if you wish to do anything over the industrial side of things using EtherCat, you will need on top of the above:. I used Beckhoff IO as this is what I am familiar with but it will work with others as long as they are compatible. You can find some cheap Beckhoff gear on ebay. You will need a a Bus coupler, EK, and then any number of IO digital, analog, encoder cards, stepper motor driver etc. If you wish to control an industrial servomotor you will need an industrial servomotor and EtherCat servomotor driver, these can be very expensive but you can find them on ebay.
I managed to borrow one from work, which is fortunate otherwise I wouldn’t have the opportunity to learn to control it using the Pi. However if you stick with it you will be rewarded with a simple to use programming environment. Before actually downloading the program you must first get some some login credentials.
Serial COM Example
Click on the “Registration” link in red and then you will have to select a country and fill in a form. You will then receive an email with some login credentials. If you return back to the download center where you clicked on the red registration linkyou can now download the exe file for the latest CODESYS V3 after entering the username and password. Once the file has been downloaded, open the exe file and if windows attempts to block it select “run anyway”.
Follow the install wizard through.
Vsaero reviewI have noticed occasionally when downloading this you get an error and the install wizard won’t start, if this happens, try re downloading the exe file.
The store states a price of 35 euros, however this is only if you wish to run your program on the Pi for over 2 hours. If you click on the download button it will prompt you to login, if you follow this link you can register for the store. After signing up return back to the download page and click on download. Download this somewhere memorable, you will need it in the next step.
I will explain how to do this in the next step. Now we have everything we need downloaded. You will have noticed at the left of the screen, a device tree has appeared see picture. PLC’s are real time devices which run tasks at different cycle times. But first how to connect to the Pi. You must use an Ethernet cable for the Pi, it doesn’t work over Wifi or it least it doesn’t with me. Note: You will have to do this every time you create a new project before you can run the program.
Now time for our first program, I have to apologise in advance here, due to the way I have written this Instructable, some of this information may be repeated in the next step, nonethelessit’s important stuff.
I shall leave it up to you to connect the LED, many other Instructables can be found which can offer advice on this.
Weintek Arduino от компании Олниса
Заказать Weintek Arduino
Универсальные аппаратно-программные средства бренда Arduino —используются для установки на панели оператора. Это абсолютно бесплатная продукция, но, тем не менее, для ее установки в систему Weintek лучше воспользоваться услугами специалиста.
Условия установки ПО
Arduino может использоваться для создания автономных объектов или подключаться к уже предустановленному ПО, работая на его основе через стандартные проводные и беспроводные интерфейсы. Главное перед началом установки убедиться, что скорость работы панели отвечает условиям функционирования программы. Для простоты установки стоит использовать подключение Modbus с нулевым смещением для простого и быстрого Arduino легко синхронизируется с человеко-машинными интерфейсами, предоставляя возможность оперативного обновления ОС на устройствах. При этом производитель распространяет средства для прошивки свободно, что позволяет избежать незапланированных расходов на техобслуживание.
Преимущества использования операторских панелей Weintek
Продукция Weintek представлена на мировом рынке операторскими консолями визуализации промышленных процессов, контроля и индикации неисправностей. Все модели Weintek оснащены программным обеспечением собственного производства или включают возможность установки стандартных ОС – Arduino одна из них. Панели могут выполнять массу задач:
- устанавливать парольный доступ для нескольких операторов;
- принимать сообщения о неисправности, о проведенном анализе работы и
- отображать процессы с помощью бар-графики, таблиц, кривых и других способов;
- мультиплексировать переменные;
- сигнализировать о состоянии устройств, аварийных ситуациях и возможных сбоях программы;
- архивировать данные и технические параметры с возможностью прямого переноса архива на сторонний носитель или компьютер;
- выводить их на экран;
- выводить данные на печать через подключенный принтер даже на удаленных расстояниях;
- управлять планами работы для конкретного устройства в реальном времени прямо через панель;
- отображать и модифицировать любые параметры сети промышленного предприятия;
- управлять с помощью программируемых клавиш интерфейса или нажатия на кнопки сенсорной панели;
- отображать HTML-документы и страницы из веб-сети;
- фиксировать произвольную область монитора для отображения наиболее важных данных;
- напрямую выходить в интернет через встроенный сервис с возможностью формировать и отсылать электронную почту.
Как приобрести
Компания “Олниса” более 10 лет занимается поставками надёжного импортного оборудования на территорию России. Прямое сотрудничество с ведущими брендами дает возможность получения всего необходимого в сжатые сроки по ценам ниже рыночных. При этом “Олниса” обеспечивает оперативную доставку по территории всей России, а также в страны СНГ с долгосрочной гарантией на все единицы из каталога.
Raspberry Pi с пользовательским интерфейсом Codesys PLC, управляющим Arduino
Вы можете узнать больше об этом и других руководствах Esmacat на официальном веб-сайте Esmacat. Посмотрите и другие наши демонстрации на Hackster.io.
Подробную документацию по кодам и шагам для этого руководства можно найти здесь.
Посетите нашу страницу кампании EASE Crowd Supply: https://www.crowdsupply.com/harmonic-bionics/ease
Overview :
В этом руководстве вы узнаете, как настроить Raspberry Pi с помощью Codesys действовать как ПЛК и как ведущее устройство EtherCAT.Он будет использоваться для управления встроенным светодиодом на плате EtherCAT Arduino Shield с помощью ведомого устройства Esmacat (EASE), подключенного к Arduino Uno.
- Сначала мы обсудим некоторую общую информацию о Raspberry Pi и Codesys.
- Изучив настройку Pi и Codesys, вы научитесь реализовывать практический проект по миганию встроенного светодиода в режиме EASE на основе пользовательского ввода путем обновления регистров EASE с помощью Codesys.
EASE – это ведомое устройство EtherCAT, которое подключается к ведущему устройству EtherCAT (ПК / ноутбук / выделенные ведущие устройства, такие как Esmacat Master S и Esmacat Master C.) Он может быть установлен поверх Arduino, других плат MCU с форм-фактором Arduino Uno и экранов. Этот экран обеспечивает высокоскоростную связь со стандартным протоколом EtherCAT для высокопроизводительных роботизированных приложений. Простые в использовании библиотеки Arduino и Mbed от Esmacat позволяют легко кодировать на базовой плате, а бесплатное главное программное обеспечение с открытым исходным кодом Esmacat имеет абстракцию высокого уровня, поэтому пользователи могут запускать приложения за считанные минуты!
Основные характеристики:- EASE соединяет платы Arduino, платы, подобные Arduino, и щиты Arduino для крупномасштабных приложений.
- Высокоскоростная связь (200 Мбит / с, в 200 раз быстрее, чем CAN-шина) поддерживается EtherCAT, который является промышленной стандартной промышленной шиной для автоматизации.
- Аппаратное / программное обеспечение EtherCAT присутствует только в EASE, поэтому на базовой плате MCU нет потери производительности.
- EASE имеет форм-фактор Arduino Uno и, таким образом, может использовать преимущества экосистемы Arduino.
- Гирляндное соединение между несколькими EASE упрощает топологию проводки.
- Технология Power-over-EtherCAT (POE) сокращает количество необходимых проводов и розеток.
- Пакет данных между платой Arduino и EASE передается через SPI, что позволяет EASE быть совместимой со многими различными типами плат, включая платы Arduino и платы с MBed.
- Arduino и Mbed, разработанные библиотекой Esmacat, позволяют пользователям легко разрабатывать код между базовой платой и EASE за считанные минуты.
- Этот экран имеет 8 регистров, которые могут использоваться для отправки / получения данных между устройствами через ведущее устройство EtherCAT через кабели Ethernet, подключенные к экрану.
Дополнительная информация: https://www.esmacat.com/ease
Рекомендуемая литература: EASE Datasheet.
Raspberry Pi:
Raspberry Pi – это крошечный недорогой настольный компьютер с двумя дисплеями, который широко используется в мозгах роботов, концентраторах умного дома, медиацентрах в качестве сетевого ядра ИИ и заводских контроллеров. Его также можно использовать в качестве ведущего устройства EtherCAT, как ноутбук / ПК. Однако следует отметить, что Pi – это компьютер на базе Linux .
Рекомендуемая литература: Раздел 4.2 Начало работы с EASE, двигателями и ЖК-экранами.
Codesys:CODESYS – это среда программирования ПЛК, которая широко используется многими компаниями по промышленной автоматизации, такими как Beckhoff, Bosch, Wago и т.д. -3 стандарта).
Для этого руководства следующие пакеты должны быть загружены по ссылкам ниже,
Примечание: Вы должны создать учетную запись Codesys, чтобы загрузить указанные выше файлы.
Примечание : ESI (информация о подчиненном устройстве EtherCAT) EASE необходимо добавить в Codesys, чтобы использовать его в программе. Обратитесь к документации (раздел 3.2.2) ниже, чтобы получить подробные инструкции по начальной настройке Codesys для Raspberry Pi.
Рекомендуемая литература : Раздел 3.2.3 Начало работы с EASE и Codesys
Аппаратные соединения:Основные аппаратные компоненты включают в себя
- ведомое устройство EtherCAT (EASE с Arduino)
- Мастер EtherCAT (Raspberry Pi)
- Питание Через Ethernet (инжектор POE)
- Кабель Ethernet
- Адаптер постоянного тока (для POE) и
Поскольку EASE использует инжектор POE, нет необходимости отдельно запитывать плату Arduino.EASE может питать плату и любые другие платы, подключенные через EtherCAT!
Подключения показаны на двух схемах, прилагаемых в разделе «Схема » данного руководства. «Схема установки оборудования» дает обзор подключений, которые необходимо выполнить, в то время как «Схема физического подключения» показывает настройку после того, как все подключения выполнены.
Примечание:
- Убедитесь, что соединения Ethernet плотно вставлены в гнезда.(Плохие соединения могут привести к тому, что подчиненное устройство не будет распознано.)
- Библиотека EASE для Arduino для связи с подсистемой Arduino.
Ссылка на библиотеку размещена в разделе «Код». Загрузите библиотеку и добавьте ее в IDE Arduino (Sketch-> Include Library-> Add.ZIP library и выберите файл), чтобы начать кодирование.
Рекомендуемая литература: Начало работы с EASE.
Программное обеспечение:Программное обеспечение, необходимое для этого руководства, включает в себя кодирование для
- Esmacat Master и
- Arduino.
Программирование Esmacat Master :
Откройте программу Codesys и импортируйте файл.project, загруженный из раздела «Код», и соберите исходный код.
Рекомендуемая литература : Раздел 8 «Начало работы с EASE и Codesys».
Кодирование Arduino :
Откройте Arduino IDE и создайте новый файл эскиза.Полный код этого руководства доступен в разделе «Код» под названием «EASE_codesys_onboard_led».
Скомпилируйте и загрузите этот код на плату Arduino, подключенную к EASE.
Примечание : Убедитесь, что вы проверили правильность выбора платы и порта в среде IDE.
Запуск мастер-кода:При запуске мастер-кода вы получаете результат, аналогичный следующему в среде Codesys (с графическим пользовательским интерфейсом, показывающим обновление регистров в EASE).
Результатов:К настоящему времени вы успешно запрограммировали платы Arduino и мастер Esmacat! Инструмент визуализации в Codesys предоставляет графический интерфейс для управления встроенным светодиодом в Arduino, аналогичный вложенному файлу GIF в начале руководства и видео на YouTube ниже.
Заключительные примечания : Подробное пошаговое руководство для этого проекта можно найти в прилагаемом ниже документе.
Рекомендуемая литература : Начало работы с EASE и Codesys.
Raspberry Pi с пользовательским интерфейсом Codesys PLC – Arduino для управления двигателями
Вы можете узнать больше об этом и других руководствах Esmacat на официальном веб-сайте Esmacat. Посмотрите и другие наши демонстрации на Hackster.io.
Подробную документацию по кодам и шагам для этого руководства можно найти здесь
Посетите нашу страницу кампании EASE Crowd Supply: https://www.crowdsupply.com/harmonic-bionics/ease
Обзор :
В этом руководстве вы узнаете, как настроить Raspberry Pi с Codesys, чтобы он работал и как ПЛК, и как мастер EtherCAT.Он будет использоваться для управления двигателями, подключенными к EtherCAT Arduino Shield с помощью ведомого устройства Esmacat (EASE), подключенного к Arduino Uno.
- Сначала мы обсудим некоторую общую информацию о Raspberry Pi и Codesys.
- Изучив настройку Pi и Codesys, вы научитесь реализовывать практический проект по управлению двигателями, подключенными к Arduino Uno и EASE, на основе пользовательского ввода путем обновления регистров EASE с помощью Codesys.
EASE – это ведомое устройство EtherCAT, которое подключается к ведущему устройству EtherCAT (ПК / ноутбук / выделенные ведущие устройства, такие как Esmacat Master S и Esmacat Master C.) Он может быть установлен поверх Arduino, других плат MCU с форм-фактором Arduino Uno и экранов. Этот экран обеспечивает высокоскоростную связь со стандартным протоколом EtherCAT для высокопроизводительных роботизированных приложений. Простые в использовании библиотеки Arduino и Mbed от Esmacat позволяют легко кодировать на базовой плате, а бесплатное главное программное обеспечение с открытым исходным кодом Esmacat имеет абстракцию высокого уровня, поэтому пользователи могут запускать приложения за считанные минуты!
Основные характеристики:- EASE соединяет платы Arduino, платы, подобные Arduino, и щиты Arduino для крупномасштабных приложений.
- Высокоскоростная связь (200 Мбит / с, в 200 раз быстрее, чем CAN-шина) поддерживается EtherCAT, который является промышленной стандартной промышленной шиной для автоматизации.
- Аппаратное / программное обеспечение EtherCAT присутствует только на EASE, поэтому на основной плате MCU нет потери производительности.
- EASE имеет форм-фактор Arduino Uno и, таким образом, может использовать преимущества экосистемы Arduino.
- Гирляндное соединение между несколькими EASE упрощает топологию проводки.
- Технология Power-over-EtherCAT (POE) сокращает количество необходимых проводов и розеток.
- Пакет данных между платой Arduino и EASE передается через SPI, что позволяет EASE быть совместимой со многими различными типами плат, включая платы Arduino и платы с MBed.
- Arduino и Mbed, разработанные библиотекой Esmacat, позволяют пользователям легко разрабатывать код между базовой платой и EASE за считанные минуты.
- Этот экран имеет 8 регистров, которые могут использоваться для отправки / получения данных между устройствами через ведущее устройство EtherCAT через кабели Ethernet, подключенные к экрану.
Дополнительная информация: https://www.esmacat.com/ease
Рекомендуемая литература: EASE Datasheet.
Raspberry Pi:Raspberry Pi – это крошечный недорогой настольный компьютер с двумя дисплеями, который широко используется в мозгах роботов, концентраторах умного дома, медиацентрах в качестве сетевого ядра ИИ и заводских контроллеров. Его также можно использовать в качестве ведущего устройства EtherCAT, как ноутбук / ПК. Однако следует отметить, что Pi – это компьютер на базе Linux .
Рекомендуемая литература: Раздел 4.2 Начало работы с EASE, Motor & LCD Shield
Codesys:CODESYS – это среда программирования ПЛК, которая широко используется многими компаниями по промышленной автоматизации, такими как Beckhoff, Bosch, Wago и т. Д. в Codesys с использованием традиционной лестничной логики или структурированного текста и непрерывной блок-схемы (стандарты IEC 61131-3).
Для этого руководства следующие пакеты должны быть загружены по ссылкам ниже,
Примечание: Вы должны создать учетную запись Codesys, чтобы загрузить указанные выше файлы.
Примечание : ESI (информация о подчиненном устройстве EtherCAT) EASE необходимо добавить в Codesys, чтобы использовать его в программе. Обратитесь к документации (раздел 3.2.2) ниже, чтобы получить подробные инструкции по начальной настройке Codesys для Raspberry Pi.
Рекомендуемая литература : Раздел 3.2.3 Начало работы с EASE и Codesys
Аппаратные соединения:Основные аппаратные компоненты включают в себя
- ведомое устройство EtherCAT (EASE с Arduino)
- Мастер EtherCAT (Raspberry Pi)
- Питание Через Ethernet (инжектор POE)
- Кабели Ethernet
- Источник питания (для двигателей)
- Двигатели для проверки кода
- Адаптер постоянного тока (для POE)
Поскольку EASE использует инжектор POE, нет необходимости в питании плату Arduino отдельно.EASE может питать плату и любые другие платы, подключенные через EtherCAT!
Подключения показаны на двух схемах, прилагаемых в разделе «Схема » данного руководства. «Схема установки оборудования» дает обзор подключений, которые необходимо выполнить, в то время как «Схема физического подключения» показывает настройку после того, как все подключения выполнены.
Примечание: Убедитесь, что соединения Ethernet плотно вставлены в разъемы.(Плохие соединения могут привести к тому, что подчиненное устройство не будет распознано.)
Необходимые библиотеки:- Библиотека EASE для Arduino для связи с подсистемой Arduino.
Ссылка на библиотеку размещена в разделе «Код». Загрузите библиотеку и добавьте ее в IDE Arduino (Sketch-> Include Library-> Add.ZIP library и выберите файл), чтобы начать кодирование.
Рекомендуемая литература: Начало работы с EASE.
Программное обеспечение:Программное обеспечение, необходимое для этого руководства, включает в себя кодирование для
- Esmacat Master и
- Arduino.
Программирование Esmacat Master :
Откройте программу Codesys и импортируйте файл.project, загруженный из раздела «Код», и соберите исходный код.
Рекомендуемая литература : Раздел 8 «Начало работы с EASE и Codesys».
Кодирование Arduino :
Откройте Arduino IDE и создайте новый файл эскиза.Полный код этого руководства доступен в разделе «Код» под названием «EASE_codesys_motor_control».
Скомпилируйте и загрузите этот код на плату Arduino, подключенную к EASE.
Примечание : Убедитесь, что вы проверили, правильно ли выбраны плата и порт в среде IDE.
Запуск мастер-кода:При запуске мастер-кода вы получаете результат, аналогичный следующему в среде Codesys (с графическим пользовательским интерфейсом, показывающим обновление регистров в EASE).
Результатов:К настоящему времени вы успешно запрограммировали платы Arduino и мастер Esmacat! Инструмент визуализации в Codesys предоставляет графический интерфейс для управления встроенным светодиодом в Arduino, аналогичный вложенному файлу GIF в начале руководства и видео на YouTube ниже.
Видео демонстрация
Заключительные примечания : Подробное пошаговое руководство для этого проекта можно найти в прилагаемом ниже документе.
Рекомендуемая литература : EASE & Codesys Motor Control.
Программирование Raspberry Pi с помощью CODESYS: 8 шагов
Теперь для этого шага нам потребуются дополнительные детали, как описано в шаге 1.
Подключение системы:
– Соедините промышленные модули ввода-вывода вместе. (см. рисунок)
– Подключите промышленный модуль ввода-вывода к источнику питания 24 В. (см. рисунок) (Все провода, которые я протягиваю, просто соединяют цифровые выходы с цифровыми входами для тестирования)
– Включите IO.
Нам также нужно будет подключить Pi немного иначе.Вам нужно будет подключить Pi к сетевому подключению через адаптер USB-Ethernet. Помните, что это, вероятно, даст нам IP-адрес, отличный от предыдущего, и появится рядом с устройством «eth2» на Pi при использовании команды «ifconfig».
– Подключите Pi к вашей сети через адаптер с помощью одного кабеля Ethernet.
– Подключите IO (используя верхний порт) к порту Ethernet Pi, используя другой кабель Ethernet.
– Включите Pi.
Прежде чем мы сможем подключить ввод-вывод, нам нужно убедиться, что у вас есть XML-файлы описания устройства от производителя промышленного ввода-вывода, и они добавлены в CODESYS.
– Если вы используете Beckhoff, файлы XML можно найти здесь:
http: //www.beckhoff.co.uk/english.asp? Download / elc …
– Загрузите и распакуйте zip-файл где-нибудь безопасный.
– Откройте CODESYS, на панели инструментов выберите Инструменты> Репозиторий устройств …
– Нажмите «Установить …»
– Перейдите в папку, которую вы только что разархивировали, выберите XML-файл «EKxxxx» и нажмите «Открыть», CODESYS автоматически установит устройство.
– Повторите вышеуказанные 2 шага для всех других устройств, которые вы принесли, в моем случае для EL1008 и EL2008 я устанавливаю «EL1xxx» и «EL2xxx».
Теперь для подключения к промышленному вводу-выводу с помощью CODESYS:
– Запустите новый проект в CODESYS и подключитесь к Pi так же, как показано на шаге 3.
– Щелкните правой кнопкой мыши «Устройство» в дереве устройств и выберите “Добавить устройство…”.
– В новом окне (см. Рисунок) выберите «Мастер EtherCAT» и нажмите «Добавить устройство».
– Закройте окно.
– Щелкните правой кнопкой мыши «EtherCat_Master» в дереве устройств и выберите «Добавить устройство …».
– Выберите «EK1100» из EtherCat> Slave> Beckhoff Automation System Couplers и нажмите «Добавить устройство»… “.
– Закройте окно.
– Щелкните правой кнопкой мыши” EK1100 “в дереве устройств и выберите” Добавить устройство … “.
– Выберите первый из ваших модулей ввода-вывода, в моем случае” EL1008 “из EtherCat> Slave> Beckhoff Automation Digital Input Terminals и нажмите” Добавить устройство … “.
– Повторите вышеуказанный шаг для всех дополнительных IO в порядке их подключения к системному соединителю.
Имеется функцию сканирования, которую вы можете использовать для автоматического добавления всех операций ввода-вывода, но я не буду описывать это в этой инструкции, поскольку полезно понимать, как CODESYS создает ввод-вывод.
Теперь нам нужно будет узнать аппаратный (MAC) адрес порта Ethernet Pi, чтобы сообщить CODESYS, где искать IO, для этого либо подключите pi к монитору, либо по SSH и используйте команду «ifconfig» в терминал. Вы ищете код рядом с HWaddr из порта eth0 (см. Рисунок).
Когда у вас есть адрес, нам нужно добавить его в CODESYS:
– В дереве устройств дважды щелкните «EtherCAT_Master».
– Введите адрес оборудования, указанный ранее, в текстовое поле ввода «Адрес источника (MAC)».
Все оборудование настроено, и теперь мы готовы создать нашу первую программу для управления промышленным вводом-выводом.
– Дважды щелкните «PLC_PRG (PRG)» в дереве устройств.
– Теперь скопируйте текст с моего снимка экрана (я приложил документ .txt, чтобы упростить задачу) в правильные окна, отмечая, что верхнее окно предназначено для объявления переменных, а нижнее – для кода. По сути, это процедура мигания, основанная на использовании двух таймеров для мигания светодиода выхода 1 устройства Beckhoff IO.
Теперь нам нужно связать нашу переменную «Output1» с нашим Beckhoff IO, для этого:
– Дважды щелкните «EL2008» в дереве устройств.
– Перейдите на вкладку «EtherCAT I / O Mapping».
– Дважды щелкните поле первой переменной. (см. рисунок)
– Щелкните по «…», которое теперь появилось в поле. (см. рисунок)
– Теперь нам нужно выбрать переменную Output1, чтобы найти ее, выполните Application> PLC_PRG, затем дважды щелкните “Output1”. Этот вывод теперь отображается на эту переменную.
Чтобы запустить программу:
– Нажмите «F11» на клавиатуре, это построит / скомпилирует код. Также находится в разделе «Сборка» на панели инструментов.
– После компиляции кода нажмите «Alt + F8» на клавиатуре, чтобы войти в Pi (или в ПЛК, чтобы дать ему правильное имя). Также находится в разделе «Интернет» на панели инструментов.
– Нажмите «Да» во всплывающем окне, чтобы загрузить программу.
– После загрузки программы нажмите «F5», чтобы запустить программу. Также находится в разделе «Отладка» на панели инструментов.
Теперь вы должны увидеть, как светодиод выхода 1 на терминале Beckhoff будет мигать с интервалом в 1 секунду. Чтобы увидеть, как работает код, дважды щелкните «PLC_PRG» в дереве устройств, и вы должны увидеть прямую трансляцию состояния переменных.
Чтобы остановить код, нажмите «Shift + F8» на клавиатуре. Также находится в разделе «Отладка» на панели инструментов.
Связывание входов от EL1008 работает аналогичным образом. Попробуйте подключить выход 1 к входу 1 и добавить переменную, чтобы увидеть, как переменная также переключается между ложным и истинным.
Теперь вы можете управлять вводом-выводом промышленного уровня с помощью Raspberry Pi, подумайте о возможностях.
Некоторые примеры могут включать использование аналоговых входов для мониторинга различных датчиков, выходов ШИМ для управления двигателями и т. Д.
Если у вас возникнут какие-либо проблемы, я добавил свой программный файл Codesys в Instructable для сравнения.
EASE – Платы прибыли и новые учебные пособия
Всем привет!
Мы надеемся, что у вас все хорошо в эти трудные времена.Мы желаем тебе удачи во время этой пандемии и надеюсь, что все это будет скоро закончится!
В связи с этим обновлением у нас есть отличные новости для наших спонсоров! Мы также с гордостью представляю несколько учебных пособий и демонстраций, которые мы разработали, чтобы показать от совместимости EASE с CODESYS!
Платы EASE прибыли
На прошлой неделе мы получили больше информации о последней версии EASE от наш производитель! Теперь у нас достаточно досок EASE для всех наших текущих спонсоров, и они будут отправлены в соответствии с заказом в котором мы получили покупки.Это означает, что все, кто поддерживал наши проект должен получить EASE к концу этого месяца. Мы может даже остаться несколько для тех, кто купит один после Cегодня. К концу апреля или начало мая для других потенциальных спонсоров. В любом случае, мы взволнован, чтобы получить ПРОСТОТА в мир и увидеть, что вы все можете развивать!
Новые учебные и демонстрационные версии
С момента нашего обновления 14 января 2020 года мы разработали еще несколько обучающие программы и демонстрации, демонстрирующие совместимость EASE, возможности, и простота использования.Весь этот материал есть на нашем Hackster.io страница. Для всех, кто не знакомый с Hackster.io, это «сообщество, посвященное обучению оборудование, от новичка до профессионала “и место, где вы можете” поделиться своим проектов и учиться у других разработчиков ». Ниже приведены руководства и демоверсии, которые мы недавно загрузили.
- Connect Touch LCD & Motor Shield w / EASE Tutorial – Используйте мастер EtherCAT для связи с 2 EtherCAT Arduino Shield от Esmacat (EASE) на Arduino для управления двигателями с помощью входа Touch Shield.
- Raspberry Pi с пользовательским интерфейсом Codesys PLC Управление Arduino – используйте Raspberry Pi с CODESYS для управления светодиодом на EtherCAT Arduino Shield от Esmacat, подключенного к Arduino Uno с помощью EtherCAT.
- 5 плат MCU обмениваются данными друг с другом через EtherCAT – экран датчика освещенности сигнализирует о необходимости изменения 4 других экранов Arduino через EtherCAT Arduino Shield от Esmacat и ведущее устройство EtherCAT.
- Raspberry Pi с пользовательским интерфейсом Codesys PLC – Arduino для управления двигателями – Используйте Raspberry Pi с CODESYS для управления двигателями, подключенными к Arduino Uno через EtherCAT, используя EtherCAT Arduino Shield от Esmacat (EASE).
- Pi и CODESYSPLC-Arduino для управления двигателями с помощью ЖК-экрана – используйте Raspberry Pi с ПЛК CODESYS для управления двигателями, подключенными к Arduino Uno и EASE, используя входные данные от другого ЖК-экрана с EASE и EtherCAT.
- Easy Way to Build IoT System w / Mbed Through EtherCAT – Этот проект демонстрирует, как быстро и легко построить IoT-систему с Mbed, платформой, подобной Arduino, и EtherCAT Arduino Shield от Esmacat (EASE).
Если вы не против помочь нам, пожалуйста, лайкайте наши сообщения и подпишитесь на нашу страницу, чтобы получать обновления, когда мы публикуем больше подобного контента! Мы также более чем счастлив поделиться своими учебными пособиями и демонстрациями, когда вы получите ЛЕГКОСТЬ.
Спасибо, что нашли время прочитать наше обновление. Оставайся в безопасности и здоровый!
Команда Esmacat
Мониторинг состояния ротационной машины с помощью Raspberry / Arduino / Codesys | Arduino | Электротехника | Микроконтроллер | ПЛК и SCADA | Малина Пи
Система должна использовать Codesys и информировать пользователя о том, работают 5 машин или нет. Если машина останавливается для запуска, пользователь может указать 7 причин. Создайте небольшую базу данных и ежедневно определяйте эффективность и загруженность каждой машины.Можно использовать Arduino или Raspberry pi или и то, и другое. Невозможно использовать последовательную связь. Желаемый Ethernet, Modbus или TCP / IP.
Навыки: Arduino, электротехника, микроконтроллер, ПЛК и SCADA, Raspberry Pi
Подробнее: машина взвешивания данных с использованием vbnet, банкомат с использованием java-сокета, игровой автомат с использованием php, devicenet raspberry pi, установка кодов на raspberry pi, кодов raspberry pi crack, кодов arduino, кодов raspberry pi gpio, управления кодами для raspberry pi sl crack, Учебник по кодам Raspberry Pi, пример Codeys Raspberry Pi, Электроника, ПЛК & amp; scada, система инвентаризации мониторинга ссуд с использованием визуального базового программирования, игровой автомат с использованием флэш-памяти, может проецировать банкомат с использованием компонентов графического интерфейса, загружать файл на локальный компьютер ftp-сервера с использованием java, игровой автомат с использованием html5, мониторинг перегрузки системы с использованием микроконтроллера, мониторинг перегрузки системы с использованием микроконтроллера pic
О работодателе:
( 2 отзыва ) Мауми, СШАИдентификатор проекта: # 17568506
De Arduino и коды с Modbus
Эта форма предназначена для коммуникационного Arduino и PLC, если вам это интересно.Экспликация, связанная с данными Arduino и Codesys, является основной динамической программой в мире промышленной автоматизации.
¿Cómo ir de Arduino a Codesys?
Лос-постоянный блог, который работает с Modbus, является одним из самых известных протоколов в мире промышленной автоматизации. Это идеальный протокол, который реализуется в соответствии с типами устройств, и является протоколом muy fiable en cuanto и промышленными коммуникациями.
Эта версия, которая может быть реализована так, чтобы размещать Arduino, и в том числе, может использовать базовые системы Codesys (включая ПЛК).Por lo tanto, es el medio que usaremos para generar la comunicación entre ambos.
Видео
Sin entrar todavía en más detalles, y como un vale vale más que mil palabras, vamos a ver el vídeo donde veremos los detalles de la comunicación entre ambos:
–
–9000 ó 2 2 Базовый элемент с оборудованием Codesys, который имеет периодические действия с новым устройством Arduino. Ambos hablan Modbus для коммуникационных данных.Частные сведения об общении
Для водных объектов, которые не имеют привычки к Modbus, следует переходить к различным вариантам передачи данных, передаваемым эхолотом на китайском языке: регистры временного хранения, идентификатор подчиненного устройства, канал… Эти данные являются важными важными для сообщества.En nuestro caso, usar 2 holdings es sólo un ejemplo para ilustrar cómo funciona la comunicación. Merece la pena mencionar que si necesitáis más información sobre Modbus, tenemos un curso disponible.
Por otro lado, el programa desarrollado en Codesys ha mantenido la llamada «jerarquía IEC 61131-3». Para aquellos que no saben que es Codesys, aquí tenemos una serie de entradas.
Подробные сведения
Arduino и Codesys (o cualquier otro PLC), которые идеально интегрируются.Y no sólo con Modbus. Hay muchas más alternativas posibles. ¿Estás trabajando con algún proyecto similar? ¿Dudas o consultas? Entonces no dudes en contactarnos!
Enginursday: Десятилетие Пи – Новости
Прошло совсем немного времени с момента выпуска платформы Raspberry Pi, но это определенно был аппаратный проект, который для нас доминировал в 2010-х годах. В сегодняшнем посте я хотел бы вспомнить и сделать обзор большой истории.
Пирс 12 марта 2020 г., 15:12 UTC 6 Добавлено в избранное Любимый 0Я сомневаюсь, что кто-то, читающий это, нуждается в предварительном курсоре. Raspberry Pi – это британский фонд, который производит набор ультра-недорогих компьютеров, способных работать с операционными системами, по ранее неслыханным ценам.В наши дни платы варьируются в цене от 10 до 60 долларов. Они ознаменовали возрождение фразы «одноплатный компьютер» и стали новым эталоном производительности для множества невероятных применений.
На меня Raspberry Pi произвел интересный эффект: мои друзья внезапно поняли, что я сделал. Работа в SparkFun в то время, как раз перед Raspberry Pi, несколько разочаровывала с точки зрения объяснения этого друзьям и семье. Arduino достигла своего апогея, IoT был этой новой захватывающей концепцией, мы снижали порог входа как для любителей, так и для прототипов…. но все это было невероятно сложно объяснить кому-либо, кроме электроники. Когда люди спрашивали, что сделал SparkFun, я отвечал, что мы – страна несоответствующих игрушек. Но Raspberry Pi каким-то образом поместил то, что делает SparkFun, в контекст. Я смог связать то, что я сделал, с тем, что люди видели в Интернете (звучит не слишком монументально, но это действительно заставляет вещи щелкать в головах людей).
Сначала SparkFun посчитал, что это слишком хорошо, чтобы быть правдой. В конце концов, это много за 35 долларов, даже восемь лет спустя. Мы определенно немного опоздали на вечеринку с принятием платформы, но когда мы внесли платформу в каталог, было невероятно увидеть все возможности использования.Конечно, главной целью было передать возможности ПК в руки как можно большего числа студентов, цель, которая была достигнута, и многое другое. Но вскоре он вырос до уровня, которого, я уверен, фонд не собирался достигать.
Криптовалюта
Одной из других основных тем развития технологий в 2010-х годах была криптовалюта. С такими потребностями, как распределенные бухгалтерские книги и майнинг, Raspberry Pi за 35 долларов США определенно вступит в игру. Raspberry Pi сделал ранний крипто-майнинг (и некоторые альт-монеты) доступным для всех, кто хотел в него разобраться.Когда у вас была криптовалюта, куда вы собирались ее положить? Кошелек на базе Raspberry Pi! Я даже слышал слухи о крупномасштабных операциях по майнингу криптовалют, состоящих из тысяч Raspberry Pis. В любом случае ясно, что обе тенденции помогли успеху другой.
Игры
Компьютерные игры – это индустрия с оборотом 135 миллиардов долларов в год. Несмотря на то, что Raspberry Pi не такой мощный, как его полноразмерные аналоги, он стал важной частью компьютерных игр с возможностью запускать популярные игры, такие как Minecraft, а также выступает в качестве эмулятора для ретро-игр.Из последних, проект RetroPie стал самым популярным способом играть в ваши любимые игры с первых лет игры. Поскольку Pi предоставляет доступ к контактам, которые позволяют вам управлять периферийным оборудованием, вы можете проявить творческий подход к своим контроллерам. Помимо создания таких вещей, как симуляторы авиационной кабины, это также имеет преимущества в мире адаптивных игр.
Исследования
Одно из применений платформы Pi, о котором вы, вероятно, не слышали, – это ее влияние на мир исследований.Raspberry Pi сделал отличную платформу для сбора и хранения данных. То же самое можно сказать и о большинстве плат на базе микроконтроллеров или микропроцессоров, но Raspberry Pi приобрел дополнительную популярность, возможно, из-за его ориентации на образование или мощности, которую он может предоставить. Один особенный проект, который выделяется, – это использование Jupyter Notebook для открытой / гражданской науки в таких областях, как науки о Земле и окружающей среде.
Пылесборник
Здесь эта статья полностью отражает мнение автора.Но страх (свободный термин), который у меня есть по поводу наиболее популярного использования Raspberry Pi, пылится на полке. Pi является новаторским, и по цене, которую большинство людей могло себе позволить в качестве импульсивной покупки. Все хотели компьютер за 35 долларов, когда он выйдет, но не все знали, что они хотят с ним делать.
У меня много разговоров о Пи, которые включают такие утверждения, как: «Да, однажды я хочу заняться своим Пи». Мне кажется, что большой процент изгнан на полку Never Going To Be Used.Это не самое худшее, но подумайте о невероятном устройстве, которое у вас есть, без использования. Итак, если вам нечего делать в эти выходные (День Пи в субботу), снимите пыль с Raspberry Pi и займитесь тем проектом, который вы всегда говорите себе, что собираетесь сделать.
Многое другое …
За восемь лет использование и проекты вокруг Raspberry Pi стали почти бесконечными. Возможности самих плат и онлайн-документации сообщества стали просто невероятными.Там каждый найдет что-то для себя. Если честно, я тоже подпадаю под предыдущий раздел, и у меня сидит Пи и ждет, когда я создам умное зеркало. Возможно, это выходные для этого.
Я хочу призвать всех добавлять свои любимые проекты, которые они видели или сделали, в комментариях ниже.
