Как написать контроллер крепления телескопа GOTO
Проекты Arduino: как написать контроллер крепления телескопа GOTOМногие люди просят меня дать им код для моего телескопа GOTO, управляемого Arduino. Я не делаю этого по двум причинам.
- Arduino предназначен для обмена знаниями. Предоставление вам исходного кода ничего не даст, кроме того, что вы поделитесь со мной множеством проблем, на которые у меня нет времени ответить.
- Код написан в недостаточно формальном стиле, чтобы выдержать совместное использование. В итоге он был скорее сделан специально для моего телескопа, управляемого Arduino, и потребовал бы различного количества рефакторинга для различных настроек привода, например. использование шаговых двигателей вместо двигателей постоянного тока.
 Цель этих заметок — предоставить один возможный путь к полностью работающему телескопу, управляемому Arduino.
Цель этих заметок — предоставить один возможный путь к полностью работающему телескопу, управляемому Arduino.Все начинается со времени
Первое, что нужно сделать, это настроить часы реального времени на Arduino. В Интернете есть много модулей часов реального времени и множество руководств по их использованию. Возможно, он у вас уже есть. Убедитесь, что он достаточно точен. Иди и сделай это. Убедитесь, что вы можете получить текущее время из модуля RTC и установить время.
Зачем нужны часы реального времени для телескопа, управляемого Arduino?
Это ядро проекта телескопа GOTO. Программное обеспечение вашего ПК/планетария будет сообщать Arduino только координаты цели в небесных координатах. Код Arduino GOTO должен определять, куда на небе указывать местоположение, дату и время. Для этого вам нужно начать с понимания местного звездного времени.
Небесные координаты для Arduino GOTO.
Вам необходимо понять, как работает RA/Dec, что означает LST и что означает Hour Angle.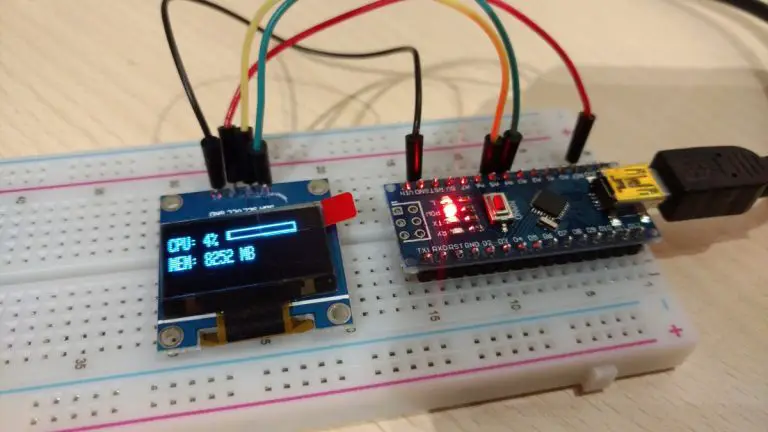
Небесные объекты и небо в целом требуют системы координат, чтобы мы могли находить цели в формате, понятном всем. На поверхности Земли мы используем широту и долготу. В небе мы используем прямое восхождение (RA) и склонение (dec). RA и Dec аналогичны широте и долготе. RA — это восточно-западная составляющая (т. е. долгота), а склонение — северно-южная составляющая (т. е. широта). Склонение в 90 градусов примерно соответствует Полярной звезде, а склонение в 0 градусов приходится на небесный экватор — воображаемую линию, проходящую примерно там, где находятся зодиакальные созвездия.
РА, по причинам, которые станут понятны, измеряется в часах. с 0 ч до 23 ч 59 мин. Один час составляет около 15 градусов. Но с чего начинается РА? Мы знакомы с долготой, начинающейся в Гринвиче в Великобритании и увеличивающейся на восток. RA также имеет нулевую точку. Это где-то рядом с Рыбами.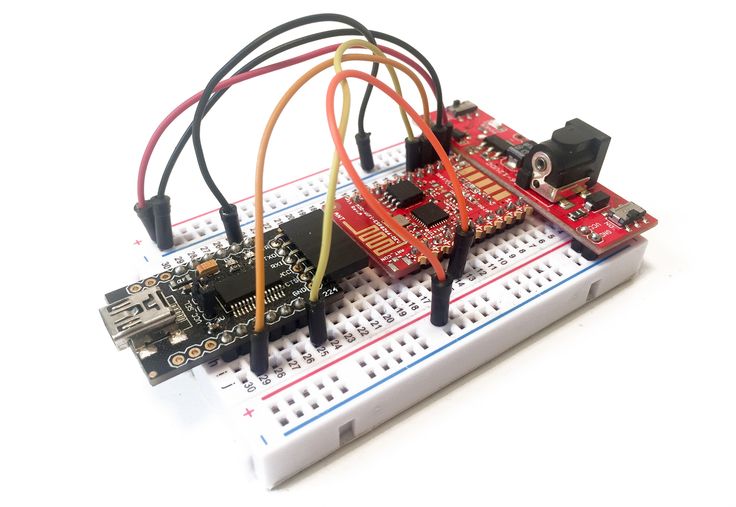
Итак, у нас есть система координат. Звезды и другие тела, не входящие в Солнечную систему, могут иметь постоянный RA/Dec, понятный каждому. Взяв в качестве примера Регул во Льве, он находится в точке прямого восхождения = 10 часов 08 минут и в точке склонения = 12 градусов 27 минут. Прямо сейчас, 10:00 27 июля, из Великобритании я должен был бы указать довольно низко на восток. Но к сегодняшнему дню мне нужно будет указать на запад. Кроме того, если бы я жил в другом месте, положение на небе было бы совершенно другим. Если бы я жил на экваторе, то Регулус был бы намного выше в небе.
RA и склонение Регула никогда не меняются (ну, не сильно), но его видимое положение на небе меняется в зависимости от времени и места.
Введите местное звездное время (LST). Каждый день из вашего местоположения будет проходить нулевая точка прямого восхождения (это место в Рыбах), то есть находиться в небе точно к югу отсюда. Очевидно, что это зависит от времени года и времени суток. Таким образом, мы определяем 00:00 LST как этот момент. Расчет LST по текущей дате, времени и местоположению представляет собой сложное приближение, которое можно найти здесь. Обратите внимание, что LST обычно сильно отличается от вашего обычного местного времени. Прямо здесь и сейчас 14:57 по местному времени, но мои часы LST показывают 10:14.
Очевидно, что это зависит от времени года и времени суток. Таким образом, мы определяем 00:00 LST как этот момент. Расчет LST по текущей дате, времени и местоположению представляет собой сложное приближение, которое можно найти здесь. Обратите внимание, что LST обычно сильно отличается от вашего обычного местного времени. Прямо здесь и сейчас 14:57 по местному времени, но мои часы LST показывают 10:14.
Теперь осмотрите телескоп. Телескоп должен быть установлен экваториально. Ось прямого восхождения монтировки указывает на Полярную звезду. Ясно, что мы можем перемещать этот вал под любым углом. Это называется часовым углом. Если бы я хотел направить телескоп точно на юг, я бы установил ось на ноль градусов (ноль часового угла). Если бы я хотел указать на горизонт на восток или запад, то это +/- 90 градусов.
Часовой угол звезды (как обсуждалось выше) зависит от времени и местоположения. LST также зависит от времени и места. RA звезды фиксирована. Последний волшебный кусочек головоломки состоит в том, чтобы сказать, что требуемый часовой угол оси RA монтировки телескопа равен HA = LST-RA.
RA звезды фиксирована. Последний волшебный кусочек головоломки состоит в том, чтобы сказать, что требуемый часовой угол оси RA монтировки телескопа равен HA = LST-RA.
Например, Регул находится на RA = 10 ч 08 м. Когда местное звездное время (LST) будет 10:08, Регулус будет строго на юг, транзитом. Таким образом, мы переместим ось прямого восхождения нашего телескопа в положение ноль градусов.
Через несколько часов, когда мои часы LST показывают, скажем, 15:26, я вычисляю сумму: HA = LST-RA = 15:26-10h 08m = +05:18. Мы все еще в «времени» здесь. Преобразуйте в градусы x15, чтобы Ha = 79,5 градуса. Опять же, это угол, под которым я размещаю свою ось прямого восхождения.
Вот еще пример
Внизу на панели задач вы можете увидеть RA arcturus (который направлен на юг) почти такой же, как LST
Вот и все, все, что с этим связано.
Склонение тоже есть, но (пирс переворачивается в сторону) это всего лишь случай установки оси склонения телескопа на то же значение в градусах, что и склонение объекта.
Итак, вернемся к Arduino
.Как я уже говорил выше, первым делом нужно добавить вычисление LST в Arduino. Прежде чем вы сможете это сделать, вам также придется запрограммировать его на запоминание вашего местоположения (либо сохранить широту и долготу в EEPROM, либо получить их из GPS). Пока вы это делаете, сохраните высоту, хотя она вам нужна только для расчетов рефракции, которые должно обрабатывать ваше программное обеспечение планетария.
Затем напишите код для расчета LST, либо разработайте его самостоятельно, либо следуйте моим инструкциям LST.
Теперь мы должны обратиться к ASCOM
Затем я рекомендую настроить и запустить набор инструментов ASCOM. Вам нужна копия Visual Studio, и вам необходимо загрузить компоненты разработчика с веб-сайта ASCOM. Я не собираюсь болтать о создании драйверов ASCOM, я рассказал обо всем этом в своем видео здесь и здесь.
Создайте драйвер телескопа и свяжите его, чтобы общаться с Arduino через последовательный порт. Теперь приступайте к реализации некоторых простых свойств, таких как местоположение и время. Вам нужно будет изобрести собственный протокол для обмена данными между ASCOM и Arduino. Никто другой этого не увидит.
Вот ранняя стадия моей системы.
Некоторые свойства драйвера должны быть реализованы, и для проверки драйвера можно использовать средство проверки соответствия ASCOM.
Мое предложение состоит в том, что вы закодируете некоторые переменные в Arduino, которые содержат текущие и целевые координаты, а также реализуете различные методы и свойства поворота ASCOM и, по сути, сделаете себя воображаемым телескопом.
После этого вы сможете подключить программное обеспечение своего планетария к новому драйверу ASCOM и использовать GOTO для перемещения по небу. Концентраторы ASCOM, например. POTH очень хороши для этого.
Расширьте его сторону Arduino, чтобы он также вычислял требуемые углы вала, то есть реализуйте все вещи HA = LST-RA.
Окно для кухонной мойки ASCOM.
ASCOM говорит вам не предоставлять всплывающее окно в вашем драйвере с множеством кнопок и кухонной раковиной.
Тем не менее, единственное, что на вашем ПК подключено к Arduino, — это драйвер ASCOM, и вы хотите иметь возможность передавать множество нестандартных команд на Arduino наряду с материалами ASCOM, поэтому добавьте окно панели управления в драйвер, который вы открываете, когда установлено свойство подключения драйвера.
Теперь вам понадобятся двигатели
.Мне все равно, используете ли вы шаговые двигатели или двигатели постоянного тока с энкодерами. Я буду говорить о «тиках энкодера», но это вполне может означать пошаговые шаги, если вы делаете это таким образом.
Наиболее важной функцией монтировки телескопа является слежение за небом с правильной скоростью. Это означает, что ось склонения должна оставаться неподвижной, а ось прямого восхождения медленно и плавно перемещаться. К настоящему времени вы, вероятно, уже сталкивались с концепцией звездного дня, 23,9.344696 часов. Ось прямого восхождения нашей монтировки телескопа должна совершать 1 оборот каждые 23,9344696 часов. Итак, следующая задача — пойти и настроить шестерни, моторы, источники питания и контроллеры, заставить Arduino запускать моторы и плавно продвигать мотор с нужной скоростью для звездного отслеживания.
Как узнать правильную скорость двигателя для сидерического отслеживания? В моем случае червячная передача на 360 зубьев. Так что мне нужно проворачивать червя каждые 239,34 секунды. Мой мотор имеет редуктор с передаточным отношением 30:1. Таким образом, шпиндель двигателя должен вращаться на один оборот каждые 7,9 секунды.8 секунд или около 7,5 об/мин. Мой мотор имеет энкодер на 2048 тактов, поэтому мотор должен работать так, чтобы энкодер делал 1 тик каждые 3,8 микросекунды. Или около 256 тиков в секунду.
Но это только моя ситуация. Ваши моторы и шестерни будут другими. Цель состоит в том, чтобы реализовать ПИД-регулятор или что-то подобное, который запускает двигатель с правильной скоростью для сидерического отслеживания.
Выбор двигателя и редуктора имеет решающее значение. В моем случае максимальная скорость двигателя составляет около 5000 об/мин. Это примерно 83 оборота в секунду. Выходная коробка передач, 30:1, вращается со скоростью 2,7 оборота в секунду. Поэтому моя максимальная скорость поворота составляет 2,7 градуса в секунду (помните червяк с 360 зубьями). Выбор двигателя и редуктора — это баланс между способностью двигаться со звездной скоростью и здоровой максимальной скоростью поворота.
Поэтому моя максимальная скорость поворота составляет 2,7 градуса в секунду (помните червяк с 360 зубьями). Выбор двигателя и редуктора — это баланс между способностью двигаться со звездной скоростью и здоровой максимальной скоростью поворота.
В конце поворота все, что медленнее, чем 2 градуса в секунду, немного утомительно. В конце слежения… ну, вам нужно разрешение энкодера, достаточное для плавного запуска двигателя на низкой скорости слежения. Или, в случае с шаговыми двигателями, вы не можете точно продвигать прицел со скоростью один шаг в секунду, так как это будет выглядеть немного рывками.
Монтировке телескопа потребуется много времени, чтобы двигаться со звездной скоростью… поэтому важно все сделать правильно.
Подсоедините мотор к монтировке телескопа и вручную (PUSH-TO) переместите прицел так, чтобы он навел на звезду… если у вас правильное сидерическое отслеживание, то звезда не будет сильно двигаться.
Привод двигателей для маневрирования
Теперь у вас есть Arduino, которая плавно запускает двигатели со звездной скоростью, вам нужно добавить возможность запуска двигателей немного быстрее — для внесения небольших корректировок в положение прицела, например. центрировать звезду. Вы можете реализовать 256 различных скоростей для выбора пользователем, если хотите, но не делайте этого. Мид был прав, вам нужно всего 4 скорости. Скорость поворота, найти скорость, центральную скорость и направляющую скорость. Для меня поворот — это максимальная скорость, скорость поиска — примерно 64-кратная звездная, а центр — примерно 24-кратная звездная. Гид наполовину сидерический.
Этих вариантов скорости более чем достаточно для всех.
Или сделать это совершенно по-другому — это полностью зависит от вас.
Вам придется покопаться в тех частях драйвера крепления телескопа ASCOM, которые имеют дело со скоростями осей и методами MoveAxis. Существует множество клиентских инструментов ASCOM, которые позволяют вам получить доступ к элементам управления NSEW, чтобы управлять телескопом по небу.
Существует множество клиентских инструментов ASCOM, которые позволяют вам получить доступ к элементам управления NSEW, чтобы управлять телескопом по небу.
Это конечно не так просто. Если я сидерическое отслеживание и мне нужно двигаться на север со скоростью НАЙТИ, то мне нужно включить двигатель склонения, но я не могу остановить звездную скорость по оси прямого восхождения. Кроме того, если ось прямого восхождения начинает движение, а затем останавливается, она не должна полностью останавливаться, а плавно переходить обратно на звездную скорость.
Переход к правому углу вала: ПЕРЕЙТИ.
После того, как двигатели и редуктор выбраны и настроены, можно с помощью простых арифметических действий переместить валы на любой конкретный угол. Используя бит информации о небесных координатах, можно легко реализовать GOTO. Ну, почти. Происходит что-то вроде этого.
- Сначала Arduino обращается к модулю часов реального времени, чтобы получить текущее местное время.
 Затем
Затем - Arduino использует известную долготу обсерватории для расчета местного звездного времени.
- Знание целевого RA затем используется для нахождения требуемого часового угла.
- Требуемый часовой угол и склонение затем используются для расчета требуемых углов вала.
- На градус приходится около 80000 тиков энкодера, поэтому мы можем найти требуемую цель 9 тиков энкодера.0008
- Затем посылаются сигналы для вращения двигателей на полной скорости до тех пор, пока не будет достигнуто требуемое количество тактов энкодера, замедление и остановка в нужном месте
Однако «правильное место» постоянно меняется. Если поворот занимает 10 секунд, первоначально рассчитанное положение будет ошибочным на пару угловых минут. Таким образом, вы должны продолжать переоценивать LST и требуемые углы вала и двигаться еще немного, пока не будет достигнуто правильное место.
Перевернуть пирс
О, это худшая часть. Идите и прочитайте документацию ASCOM о переворотах пирса и расчетах пирса. Это заставит вашу голову болеть. Если у вас нет крепления для вилки, в этом случае забудьте об этом.
Идите и прочитайте документацию ASCOM о переворотах пирса и расчетах пирса. Это заставит вашу голову болеть. Если у вас нет крепления для вилки, в этом случае забудьте об этом.
Как вы знаете, если у вас есть немецкая экваториальная монтировка, ось склонения иногда приходится поворачивать на 180 градусов. Для нас это означает, что в зависимости от той части неба, на которую вы смотрите, вам может понадобиться, чтобы угол наклона оси склонения составлял 180 градусов, иначе, когда вы двигаетесь с востока на запад, вы в конечном итоге будете указывать на землю.
Также помните, что для каждой позиции в небе есть две возможные конфигурации маунта. Мы лучше всего знакомы с этим, когда делаем переворот по меридиану. Например. У меня может быть такой прицел
Или вот такИ оба указывают на один и тот же азимут, но все углы вала отклоняются на 180 градусов.
Оба вполне допустимы. Что еще более забавно, мы можем указать куда-нибудь на запад с помощью любой из этих конфигураций 9. 0003
0003
Одно менее полезно, чем другое. Большинство маунтов рухнет при использовании правой версии. При выполнении GOTO вам необходимо автоматически выбирать углы вала, которые дают правильные углы для лучшего из двух решений.
Однако рассмотрите это положение телескопа.
Вы не хотите, чтобы монтировка указывала таким образом в результате обычного GOTO, но в некоторых ситуациях это действительно желательно. В моем окне драйвера выше вы можете увидеть небольшую галочку «Autoside». Это позволяет мне отменить автоматический выбор углов вала и перейти в это нечетное положение.
Цель состоит в том, чтобы избежать переворота меридиана. Например, в 9 часов вечера в начале января Орион находится на юго-востоке и примерно в 2 часах от транзита. Если я «поверну» монтировку обратно в указанное выше положение, я смогу начать визуализировать Орион на юго-востоке и продолжать отслеживать его, не останавливаясь на меридиане, пока он не сядет примерно в 4 часа утра.
Я нахожу это чрезвычайно полезной функцией.
Исправление перехода
Следующее, что нужно сделать, это реализовать функцию синхронизации для уточнения GOTO. Это все о методах драйвера ASCOM SyncToCoordinates() и т. д.
Обычно после выполнения GOTO мы указываем не совсем туда, куда хотим. Возможно, мы ПЕРЕДВИЖЕМСЯ к яркой звезде, как только ПЕРЕХОД завершится, пользователь регулирует положение прицела с помощью кнопок перемещения в точно правильное положение. Прицел теперь будет думать, что мы указываем немного на другое значение RA/Dec. Затем мы говорим нашему программному обеспечению планетария «синхронизироваться с целью». Это сообщает прицелу, куда он на самом деле указывает. Осциллограф должен вычислять смещения между тем, куда, по его мнению, он указывает, и тем, куда, как ему сказали, он указывает. Эти смещения используются для всех будущих переходов до тех пор, пока следующая синхронизация не изменит их.
Гораздо полезнее вместо яркой звезды просто сделать снимок и решить пластину, а затем использовать наше программное обеспечение для обработки изображений (например, Maxim DL) для синхронизации эндоскопа с положением решения.
Парковка
Функция парковки есть в драйвере ASCOM. Это просто поворачивает прицел в ранее определенное положение парковки и выключает двигатели.
Автогид
Найдите функцию пульсометра в драйвере ASCOM.
Будущая работа
Другие функции, которые я реализовал
- Аварийное отключение
- Таймер выключения для автоматической обработки изображений
- Периодическая коррекция ошибок шестерен коробки передач (PEC)
- Локальный мониторинг температуры и влажности.
- Определение исходного положения (с помощью датчиков Холла)
После этого вы можете делать все, что пожелаете!
aGotino – простой Arduino (Nano) Goto – Форум банкоматов, оптики и DIY
#1 gскорость
Размещено 21 октября 2020 г. – 17:31
– 17:31
Никогда не слышал о Готино? Ну, я просто выбрал это имя, так как оно звучит красиво! Это продолжение проекта RA Drive, который я задокументировал ранее — он работает из коробки на креплениях Exos2/Eq5, но, конечно, может быть адаптирован к любому GEM.
Редактировать: вы можете получить последний список кода и функций на странице проекта Gotino Github. Все новости анонсируются в этой теме.
Что такое Готино?
Почти готовая система, основанная на Arduino Nano, одном из самых маленьких и дешевых микроконтроллеров в семействе Arduino, но с достаточной мощностью и гибкостью, чтобы позволить некоторому умному коду правильно его использовать.
Я написал “почти”-goto , так как эта первая версия довольно проста и сосредоточена на решении моей проблемы: возможность перемещаться к удаленному объекту с малой величиной после наведения телескопа на хорошо известный объект поблизости. Мне очень нравится прыгать по звездам, но… пытались ли вы когда-нибудь достичь чего-то, спрашивая себя <<Увижу ли я это в свой прицел и этим видением?>> и затем <<Атч, я пропустил это, кто знает, если я указывал не на то место! >>
Мне очень нравится прыгать по звездам, но… пытались ли вы когда-нибудь достичь чего-то, спрашивая себя <<Увижу ли я это в свой прицел и этим видением?>> и затем <<Атч, я пропустил это, кто знает, если я указывал не на то место! >>
Вот результат (в главной роли Roger, The Cat) :
Особенности
- RA Drive Следуйте звезду на 1X … Курс
- Небольшой пульт дистанционного управления с двумя кнопками для быстрого перемещения вперед или назад в RA и DEC
- Перейти через последовательный порт (сейчас USB), используя следующие команды
- ±RRRR±DDDD: поворот на RRRR’ e DDDD’ (градусы минут) в RA e декабря
- сЧЧММДД±ДДММСС : установка текущей позиции. Пример: Altair в Aql составляет 19 ч 51 м 47 с, +08° 52′ 06″, поэтому введите s195147+085206 .
- гЧЧММДД±ДДММСС: перейти на новую позицию. Пример: M11 (Дикая утка) составляет 18 ч 51 м 05 с, -06° 16′ 12″, поэтому введите g185105-061612 .
- gMnnn : перейти к объекту Мессье nnn (да, пока в память загружается только этот каталог)
- -sleep отключить энергосбережение (см. ниже)
- +отладка активировать подробный отладочный ход

Конечно, вы можете отправлять последовательные команды через ПК/ноутбук, но в дикой природе старый телефон Android с кабелем Usb OTG и приложением Serial USB Terminal отлично справляется с этой задачей. Вот сессия с моего телефона для перехода с Альтаира на М11:
Вот сессия с Шедара (альфа-Кас) на М103, потом М31 и наконец Мирах (бета-И):
21:39:04.772 Подключено к устройству Ch44x 21:39:06.233 aГотино: ГОТОВ и РАБОТАЕТ > с004031+563214 21:39:38.817 получено: s004031+563214 21:39:38.817 Установлено текущее положение > GM103 21:40:06.640 получено: gM103 21:40:06.640 Перейти к M103 21:40:06.640 *** движется... 21:40:18.066 *** ...сделано > гМ31 21:44:52.066 получено: gM31 21:44:52.066 Перейти к M31 21:44:52.066 *** движется... 21:45:08.657 *** ...сделано > g010944+353711 21:47:55.317 получено: g010944+353711 21:47:55.317 Перейти к новому RA/DEC 21:47:55.317 *** движется... 21:48:01.596 *** ...сделано
Довольно просто, а? А как насчет Stellarium, SkySafary, KStar? Подождите… может быть, это будет дальше. Я изучаю, как работает протокол LX200.
Список покупок
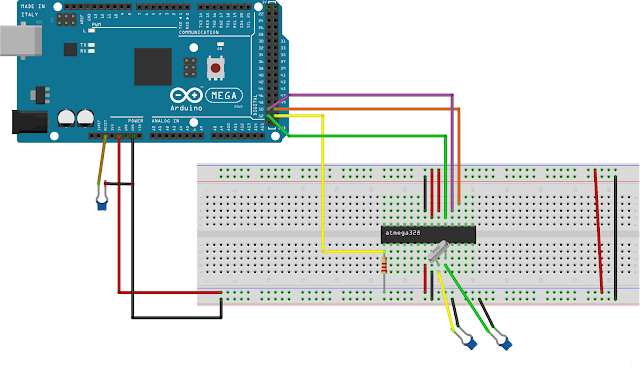
Это тот же самый список, показанный в проекте RA Drive, но, конечно же, продублируйте двигатель, шкивы, ремень, кнопку и добавьте кабель RJ11 с двумя разъемами для подключения Dec Motor к привод:
Для опоры двигателя DEC подойдет простая пластина 2 см x 6 см, здесь ниже с винтами, обратите внимание на продолговатые отверстия в пластине, чтобы зарегистрировать расстояние между шкивами и правильно натянуть ремень, чтобы избегайте люфта при смене направления.
Опору двигателя прямого восхождения см. в проекте привода прямого восхождения. Вот результат:
в проекте привода прямого восхождения. Вот результат:
, и, наконец, здесь ядро, которое остается красиво упакованным в Mount Black Cover:
.
По сравнению с проектом RA Drive, контакты MS* двигателей управляются (лазурным) Arduino, чтобы включить или отключить микрошаг и обеспечить быстрые движения при повороте. DEC Motors также переходит в спящий режим (фиолетовый цвет), когда он не используется.
Соединительные контакты были выбраны в соответствии с драйверами и микроконтроллером, чтобы я мог соединить некоторые из них вместе с двойными перемычками Dupont
Хорошо, с кабелями беспорядок, но я не практичен с самодельными КПБ…
Программное обеспечение
Вот мозг, который склеивает все вместе, чтобы сделать что-то, что имеет смысл, я надеюсь:
aGotino. ino — C-код для Arduino
ino — C-код для Arduino
Catalog.h — содержит несколько объектов и будет улучшен У меня есть несколько улучшений в конвейере.
Кредиты
Я прочитал довольно много, чтобы собрать это воедино, OnStep — гораздо более крупный проект с приятным сообществом, от которого можно получить идеи и информацию об оборудовании, AstroEQ также предоставил несколько входных данных. Компания Epsilonphoto (итальянская) попробовала аналогичное решение с другим подходом. Я не могу найти сообщение, в котором кто-то теоретически рассматривал возможность работы между идеально синхронизированными импульсами шагового двигателя, что было ключом к созданию этого работающего программного обеспечения с таким простым микроконтроллером. И, конечно же, сообщество CN (а также итальянское сообщество Astronomia.com), от которого я почерпнул много знаний!
Большие фотографии в альбоме:
- BoriSpider, PrestonE, mikefulb и еще 20 это нравится
- Наверх
#2 ЧарОзероАстро
Размещено 25 октября 2020 г. – 11:41
– 11:41
Приятно – спасибо, что поделились
- Наверх
#3 gскорость
Размещено 28 октября 2020 г. – 03:45
Улучшение: хотя ввод координат дает максимальную гибкость, в дикой природе это не так практично, поэтому почему бы не создать список звезд для поиска, чтобы на звезду можно было ссылаться только с помощью 1-3-значного числа? Вот мы:
Звездный список Готино — содержит все звезды созвездий α, β, γ до 4-й величины и другие звезды до 3-й величины, поэтому все (и многое другое) звезды, которые можно легко найти и направить в телескоп, должны быть покрыты. Потребовались некоторые исследования, чтобы разработать список в координатах J2000, кредиты BSC5P НАСА – Каталог ярких звезд и проект kStar для названий звезд.
Вот сессия: Подключил телефон к usb разъему, навел прицел на Мирфак (α-Per, 9М
Затем я указал на Капеллу (α-Auriga S18) и повернул к M36, а затем к M37 — добавил барлоу для достижения 169x / tFoV 0,31° и вернулся к M36 и Капелле — все были в центре
И это с обычным приближенным полярным выравниванием, которое я делаю для визуального использования, т. е. монтирую на уровне, а полярную сетку близко к центру поляроскопа. Для моей цели, т. е. иметь простое решение без излишеств для « с расширенным звездным прыжком », я чувствую себя удовлетворенным!
е. монтирую на уровне, а полярную сетку близко к центру поляроскопа. Для моей цели, т. е. иметь простое решение без излишеств для « с расширенным звездным прыжком », я чувствую себя удовлетворенным!
Поскольку код становится все более сложным (и, надеюсь, я получу информацию от сообщества), я собираюсь разместить его на github и вскоре опубликовать ссылку…
Отредактировано gspeed, 28 октября 2020 г., 03:47.
- Спео это нравится
- Наверх
#4 gскорость
Размещено 01 ноября 2020 г. – 12:31
Добавлена базовая поддержка протокола Meade LX200 Не уверен, что буду использовать его так часто, поскольку обычно не ношу с собой свой ноутбук, и для моих нужд достаточно просто использовать мобильный телефон, как показано выше, но я хотел чтобы увидеть, как сложно было добавить эту часть, и, что ж, приятно видеть, как известное программное обеспечение интегрируется с решением «сделай сам».
Базовая поддержка означает, что действия синхронизации и поворота реализованы: протестировано с INDI (базовый драйвер LX200), поэтому любое программное обеспечение, поддерживающее INDI, должно работать (KStars, Cartes du Ciel, Stellarium и т. д.) и со Stellarium изначально.
Здесь пара снимков экрана:
и короткое видео:
- Pinbout, coinboy1 и yba2cuo3 нравится это
- Наверх
#5 gскорость
Размещено 06 ноября 2020 г. – 04:15
Вот дополнительное видео (извините за довольно плохое качество), чтобы показать, как можно использовать aGotino – на самом деле это было моей целью и как я использую его в большинстве случаев. Я прыгаю по звездам, но при необходимости я могу указать на видимую цель поблизости и получить дополнительную помощь, чтобы добраться до этого слабого объекта
https://www. youtube….h?v=YF_J7_7lyB4
youtube….h?v=YF_J7_7lyB4
Отредактировано gspeed, 6 ноября 2020 г., 04:16.
- Pinbout и Speo это нравится
- Наверх
#6 gскорость
Размещено 06 ноября 2020 г. – 04:18
Я упаковал код и добавил его в репозиторий с открытым исходным кодом GitHub, здесь будут размещены наиболее актуальные коды и список функций:
aGotino на GitHub
Я думаю, что я сделано на короткий срок, я получил то, что искал – менее чем за $100/90€ Я считаю, что это отличный результат
установить/перейти к чему угодно, используя координаты RA&Dec, но было бы удобно также добавить более яркие объекты NGC/IC (238 более ярких звезд и объектов Мессье уже есть).
Я не занимаюсь AP, но обнаружил, что для правильной обработки команд управления импульсами phd2 (:Mxnnn# или подобных) потребуется просто обновление программного обеспечения – я могу взглянуть на это. Я не думаю, что в наше время добавление порта ST4 стоило бы затраченных усилий.
Я не думаю, что в наше время добавление порта ST4 стоило бы затраченных усилий.
Чистого неба!
Отредактировано gspeed, 06 ноября 2020 г., 04:20.
- mikefulb, LarsMalmgren и Pinbout нравится это
- Наверх
#7 овикинг99
Размещено 21 ноября 2020 г. – 02:40
Спасибо за программу! Ручной контроллер перестал работать на моем CG5 лет назад. С тех пор я приобрел крепление iOptron AZ mount Pro. Он отлично работает для моей неуправляемой астрофотографии DSLR примерно до 20-30 секунд. Я раскопал свой старый CG5. Я заказал новый комплект дисков Celestron на Amazon. Короче говоря, 3 из 3 возвратов, ни один из них не работал постоянно. Я посмотрел на Onstep, но это немного сложнее, чем мне нужно. Я просто хотел в основном точный привод RA, который брал бы меня за 60 секунд для более длительных экспозиций без следов и т. Д. У меня есть все компоненты со свалки моего 3D-принтера. Я дам ему попробовать!
Д. У меня есть все компоненты со свалки моего 3D-принтера. Я дам ему попробовать!
- Наверх
#8 gскорость
Размещено 21 ноября 2020 г. – 04:19
Спасибо! Обратите внимание, что aGotino еще не включает процедуру для выполнения PEC (периодической коррекции ошибок), которая, я полагаю, необходима для длинных выдержек без автогида, но, возможно, с выдержками менее минуты она все еще может работать хорошо.
Функциональность aGotino будет расширяться в будущем, в любом случае можно в любое время переработать почти все компоненты (приводы, ремень, шкивы, двигатели) и позже «обновить» до OnStep.
- oviking99 это нравится
- Наверх
#9 овикинг99
Размещено 21 ноября 2020 г. – 23:11
– 23:11
Он живой! Это программа RA, работающая по одной оси. Спустя 18 лет и 3 двухосевых контроллера Celestron я устал пытаться заставить еще один Celestron HC работать должным образом. Я просто использовал значения по умолчанию в программе. Я пересчитаю правильную синхронизацию для своих шкивов 20/60, а также установлю ток на моем дешевом шаговом двигателе NEMA 17. Это немного громко из-за деревянного крепления, которое я использую в качестве шаблона. Я очень доволен результатами. Благодарю вас!
https://www.youtube….h?v=3J2GQFiZAz0
- gspeed это нравится
- Наверх
#10 gскорость
Размещено 22 ноября 2020 г. – 08:12
Super Вы также можете использовать программу aGotino для привода с одной осью, просто проверьте PIN-код кнопки RA, который изменился по сравнению с решением только для RA. Код имеет несколько улучшений, но для отслеживания RA вы должны просто заметить, что кнопка будет более реактивной.
Код имеет несколько улучшений, но для отслеживания RA вы должны просто заметить, что кнопка будет более реактивной.
- oviking99 это нравится
- Наверх
#11 gскорость
Размещено 22 ноября 2020 г. – 08:37
Несколько улучшений/изменений в коде
- Импульсы двигателя прямого восхождения теперь управляются прерыванием , это делает код чище и проще – спасибо @GhostLoveScore за предложение.
- Ускорение: поворот теперь ускоряется в течение первых 100 шагов, это приводит к плавному старту, но также, похоже, решает проблему с глюками, когда включено энергосбережение (спящий режим) и двигатель возвращается в исходное положение при пробуждении. Спасибо @DlambdaR за предложение. Я добавлю то же самое к кнопке Dec.
- Сторона пирса – это был большой промах! Терраса, с которой я обычно наблюдаю, полностью открыта на восток, с севера на юг.
 Следовательно, в большинстве моих тестов прицел обычно располагается на западной стороне моего GEM, глядя на восток. Я никогда не считал, что при перевороте меридиана обычно перемещают прицел на восточную сторону монтировки, указывая на запад: когда это происходит, мотор Dec должен работать в противоположных направлениях. Поскольку aGotino не требует выравнивания и знания положения и часа, он также не знает, с какой стороны пирса находится прицел… пока новая команда ( +side ) был реализован для указания стороны (по умолчанию запад), но проблема остается для INDI/Stellarium — я думаю, что собираюсь добавить переключатель в дизайн, если не появится идея получше.
Следовательно, в большинстве моих тестов прицел обычно располагается на западной стороне моего GEM, глядя на восток. Я никогда не считал, что при перевороте меридиана обычно перемещают прицел на восточную сторону монтировки, указывая на запад: когда это происходит, мотор Dec должен работать в противоположных направлениях. Поскольку aGotino не требует выравнивания и знания положения и часа, он также не знает, с какой стороны пирса находится прицел… пока новая команда ( +side ) был реализован для указания стороны (по умолчанию запад), но проблема остается для INDI/Stellarium — я думаю, что собираюсь добавить переключатель в дизайн, если не появится идея получше.
Обратите внимание, что знание стороны пирса будет обязательным для будущих улучшений, таких как добавление порта St4 или поддержка импульсной направляющей phd2.
Отредактировано gspeed, 22 ноября 2020 г., 13:34.
- oviking99 это нравится
- Наверх
#12 овикинг99
Размещено 22 ноября 2020 г. – 16:06
– 16:06
У меня есть несколько щитов с ЧПУ. Это простое решение поверх Uno. Они сейчас очень дешевые. Разница в том, что мне пришлось бы изменить обозначение контакта в программе.
- Вернуться к началу
№13 гаторинженер
Размещено 22 ноября 2020 г. – 21:31
Отличная работа, вижу недорогую замену stellarcat…..
- gspeed это нравится
- Наверх
№14 овикинг99
Размещено 23 ноября 2020 г. – 02:07
Я пересчитал [STEP_DELAY] до 15582 , используя передаточное отношение червяка 144:1 и [Другое] при 3, моем передаточном отношении шкива 20/60. Единственная строка, которую я смог изменить, была здесь; const unsigned long STEP_DELAY = 15582; Мой расчет. На самом деле я несколько раз менял STEP_DELAY, но без изменений. Экспозиции одинаковые, RA движется с той же скоростью в соответствии с моими 20-секундными экспозициями. Любые мысли приветствуются. Спасибо!
Экспозиции одинаковые, RA движется с той же скоростью в соответствии с моими 20-секундными экспозициями. Любые мысли приветствуются. Спасибо!
*****РЕДАКТИРОВАНИЕ****** Я использую программу для одной оси RA. Я вижу, что в программе Agotoino также есть место для изменения MICROSTEPS_PER_DEGREE, по моим расчетам это 15360. Скорее всего, мне следует использовать Agotoino вместе с перемещением штифта.
Изменено oviking99, 23 ноября 2020 г. – 02:40.
- Наверх
№15 gскорость
Размещено 23 ноября 2020 г. – 04:24
да – лучше, если вы опубликуете сообщение в другой ветке, оно должно работать так, как ожидалось, если вы правильно рассчитали STEP_DELAY, учитывая также ваш шаг на оборот и микрошаги. Одноосевой программе RA не нужно знать значение микрошагов (это необходимо в aGotino для функций перехода) – однако вам нужно это для правильного расчета константы STEP_DELAY.
- Наверх
№16 gскорость
Размещено 25 ноября 2020 г. – 05:31
…
…
- Сторона пирса – […] … на данный момент реализована новая команда ( +side ) для указания стороны (по умолчанию запад), но проблема остается для INDI/Stellarium – Я думаю, что собираюсь добавить переключатель в дизайн, если не появится идея получше.
У меня есть идея получше установить Side of Pier без дополнительного оборудования: нажать обе кнопки на 1 секунду. Таким образом, внутреннее состояние по умолчанию установлено на западную сторону пирса, и нажатием обеих кнопок на 1 секунду aGotino устанавливает состояние на восточную сторону, моторы останавливаются на 3 секунды, пока включается красный светодиод. При возвращении на запад светодиод мигает дважды. Код был обновлен и работает, протестировано прошлой ночью
При возвращении на запад светодиод мигает дважды. Код был обновлен и работает, протестировано прошлой ночью
Отредактировано gspeed, 25 ноября 2020 г., 05:33.
- Наверх
# 17 gскорость
Размещено 01 декабря 2020 г. – 02:59
Обновление
- Объекты NGC до 11-й величины загружены в память – это 768 объектов; новая команда s/g Nnnnn может использоваться для установки/перехода к
Список последних функций и набор команд находится на странице Github aGotino
- Наверх
# 18 овикинг99
Размещено 11 декабря 2020 г. – 03:07
Я запустил эту программу. Я сделал специальную доску. Некоторые проблемы с деком почему-то. Не возвращается в то же положение. РА работает отлично.![]() Я еще не подключил это к своему CG-5. Еще несколько дней. Я использую терминал Android, а также последовательный терминал на своем MAC. Оба работают отлично, только проблема с dec. У меня есть подозрение, что это связано с режимом сна. Я опубликую позже. Спасибо еще раз!
Я еще не подключил это к своему CG-5. Еще несколько дней. Я использую терминал Android, а также последовательный терминал на своем MAC. Оба работают отлично, только проблема с dec. У меня есть подозрение, что это связано с режимом сна. Я опубликую позже. Спасибо еще раз!
- Наверх
# 19 gскорость
Размещено 11 декабря 2020 г. – 07:40
Сделал доску? Звучит интересно!
О моторе декабря, вы используете версию после 22 ноября? Глюк при пробуждении исчез с ускорением. В любом случае вы можете ввести команду -sleep или установить для переменной POWER_SAVING_ENABLED значение false в коде, чтобы отключить спящий режим драйвера.
Удачи! Жду фото
- oviking99 это нравится
- Наверх
#20 овикинг99
Размещено 11 декабря 2020 г. – 12:37
– 12:37
Это двухточечная печатная плата. Прошло много лет с тех пор, как я сделал это. Я хотел бы добавить дисплей. Глядя на увиденную студию Wio Terminal. Он имеет множество функций, включая Wi-Fi и т. Д. За 30 долларов США он будет запускать код Agotino или может использоваться в качестве терминала, «клавиатуры». Он прекрасно впишется в неиспользуемое пространство. Хотя это позже.
- gspeed это нравится
- Наверх
# 21 овикинг99
Размещено 11 декабря 2020 г. – 12:47
Ссылка на терминал Seeed Studio Wio;
https://smile.amazon…AGWVKRX6WTWH8V2
- Наверх
# 22 gскорость
Размещено 11 декабря 2020 г. – 16:34
А, я думал, вы построили PBC Терминал Wio очень интересен, я посмотрю на него поближе. .. он действительно дешев для своих возможностей.
.. он действительно дешев для своих возможностей.
Кстати, согласно вашему предложению в другой ветке, я потратил менее 15 долларов и теперь жду пару CNC Shield V4.0
от keyestudio
Это позволит избежать всех кабелей (кроме шаговых двигателей) и снизит необходимость пайки, чтобы просто соединить штифт включения микрошага Nano с драйвером.
- oviking99 и yba2cuo3 нравится это
- Наверх
# 23 овикинг99
Размещено 11 декабря 2020 г. – 20:22
Да, готовый вариант – это то, что нужно. По сути, нанощит, который вы опубликовали, — это то, что я построил вручную. Предлагается оставить микрошаг на уровне 32 или выбрать плату, а также изменить скорость в программе. В противном случае вам придется взломать платы, чтобы добраться до блоков микрошаговых перемычек/переключателей. Я буду продолжать обновлять свой прогресс с увиденным Wio. Интересно, что его можно запрограммировать с помощью Arduino IDE, python, «C» и т. д. Самое интересное, что у него уже есть дисплей и Wi-Fi. Единственное внешнее по отношению к Wio — это драйверы шаговых двигателей. Интересно, ваша программа вернула мне интерес к микроконтроллерам и робототехнике! 😉
Я буду продолжать обновлять свой прогресс с увиденным Wio. Интересно, что его можно запрограммировать с помощью Arduino IDE, python, «C» и т. д. Самое интересное, что у него уже есть дисплей и Wi-Fi. Единственное внешнее по отношению к Wio — это драйверы шаговых двигателей. Интересно, ваша программа вернула мне интерес к микроконтроллерам и робототехнике! 😉
- Наверх
# 24 gскорость
Размещено 14 декабря 2020 г. – 04:03
@oviking99 рад, что к вам вернулся интерес.
Я не уверен, что мы можем оставить микрошаг на уровне 32: я считаю, что поворот будет слишком медленным. Кстати, на плате, которую я разместил выше, похоже, есть несколько открытых контактов (D12/D13, см. 2-й рисунок в ссылке, размещенной выше), поэтому должно быть довольно легко подключить их к контактам микрошага. С нетерпением жду прогресса Seeed Wio!
Отредактировано gspeed, 14 декабря 2020 г. , 14:03.
, 14:03.
- oviking99 это нравится
- Наверх
# 25 овикинг99
Размещено 16 декабря 2020 г. – 13:45
Итак, после нескольких часов поиска и устранения проблем с декодированием оказалось, что это был плохой DRV8825! Это моя удача. Я думал, что проверил все драйвера. Тот попал в «рабочую» корзину. Ну, всего несколько часов потеряны. Но теперь это работает! 😉 Теперь попробуем заставить терминал Wio работать в качестве ручного контроллера с последовательным дисплеем. Он имеет мини-джойстик, а также многофункциональные кнопки.
На самом деле, даже если на плате keystudio нет других контактов, есть контакты микрошагового двигателя, которые можно легко подключить к соответствующим контактам (2) на плате. Прежде чем я нашел неисправный DRV8825, я думал, что это проблема микрошага. Виноват. Я согласен, лучше всего оставить выбор шага для более быстрого движения.