
Can Шина – Как программно управлять техникой?
С ростом популярности GPS контроля транспорта и сельскохозяйственной техники, возросла и популярность контроля с применением CAN-шины. Давайте разберем, почему использование CAN-шины — это действительно отличное решение.
Что такое кан шина?
Кан шина — это интерфейс, или система цифровой связи управления электрическими устройствами транспортного средства. Главной целью использования сети контроллеров является сбор, анализ и контроль данных, полученных со всех устройств, установленных на автомобиле. CAN шина была изобретена в 80х годах прошлого столетия известной немецкой компанией Robert Bosch GmbH. Использование CAN-шины — одно из лучших решений для современного бизнеса, деятельность которого тесно взаимосвязана с использованием коммерческого транспорта: грузовых автомобилей, автобусов, сельскохозяйственной техники и т.д. С помощью единой системы управления электрическими устройствами транспортного средства можно полноценно контролировать его состояние и оперативно предпринимать все необходимые меры по устранению выявленных неполадок. Дополнительным преимуществом технологии можно назвать подключение к CAN-шине бортовые ГЛОНАСС/GPS контроллеров и датчиков уровня топлива. GPS-мониторинг транспорта с применением CAN-шины — это эффективный метод получения всех параметров эксплуатации автомобиля.
Дополнительным преимуществом технологии можно назвать подключение к CAN-шине бортовые ГЛОНАСС/GPS контроллеров и датчиков уровня топлива. GPS-мониторинг транспорта с применением CAN-шины — это эффективный метод получения всех параметров эксплуатации автомобиля.
Получить консультацию
Can-шина принцип работы
Чтобы понять, как работает CAN шина, можно представить эту технологию в виде единой сети, объединяющей датчики и прочие исполнительные элементы конкретного автомобиля. Сама шина представлена витой парой, имеющей 2 отдельные линии — CAN-high, CAN-low. По шине от одного к другому блоку бортового компьютера передаются данные со скоростью 1 Мбит в секунду. Напряжение к каждому элементу передается от бортовой сети. Однако от стандартной электропроводки шина отличается тем, что она соединяет элементы параллельно. Это значительно упрощает прокладку проводки и позволяет обойтись меньшим количеством проводов. За счет этого единая система мониторинга показателей характеризуется высокой надежностью.
Контроллер фиксирует все ошибки и неисправности. Они обрабатываются, а узел, в котором были идентифицированы ошибки по умолчанию отключается от общего соединения.
Если анализировать ключевые характеристики современных CAN-шин, можно выделить следующие:
- Тип провода: витая пара проводов и шлейф считаются бюджетными вариантами, которые демонстрируют низкую скорость передачи данных. Что касается проводов из оптоволокна, они обеспечивают максимальную скорость передачи данных. К другим преимуществам варианта можно отнести высокую надежность и большой, если сравнивать с витой парой и шлейфом, срок эксплуатации.
- Тип идентификатора: условно все CAN-шины по типу идентификатора можно разделить на CAN2 0A и CAN2 0B. Маркировку CAN2 0A имеют шины, функционирующие в формате 11 бит. Однако такая система не может выявить ошибки на сигналы от модулей, которые работают с 29 бит. CAN2 0B, в отличие от предыдущего варианта, все данные о выявленных ошибках могут передаваться на микропроцессорные устройства при обнаружении идентификатора на 29 бит.

Вид шины также является важной характеристикой, в соответствии с который интерфейсы классифицируются следующим образом:
- Комфорт: цифровой интерфейс предназначен для соединения всех устройств, в том числе и дополнительных, например, подогрева сидений, элекрорегулировки зеркал и прочее.
- Для силового агрегата: подключается к транспортному средству для обеспечения быстрой связи между между управляющими системами по дополнительному каналу.
- Информационно-командные интерфейсы: используются для обеспечения бесперебойной связи между узлами, которые задействованы в обслуживании транспортного средства.
Заказать бесплатный расчёт
Подключение к can шине
Подключение к CAN-шине автомобиля позволяет эффективно решить целый комплекс задач:
- Контролировать уровень топлива и его реальный расход.
- Получать данные о состоянии педалей авто.
- Выявлять, какого стиля придерживается водитель.
- Следить за состояние системы безопасности транспортного средства.

- Контролировать температуру двигателя и охлаждающей жидкости.
- Получать информацию об уровне нагрузки на ось авто.
На сельскохозяйственных, транспортных, коммунальных, строительных предприятиях также используются интерфейсы для централизованного отслеживания рабочих параметров авто. К примеру, подключение к CAN-шине трактора позволит получать информацию по следующим параметрам:
- Обороты двигателя;
- Актуальный момент двигателя;
- Часовой расход топлива;
- Мгновенный путевой расход топлива.
Подключение к CAN-шине комбайна позволяет получить не только показатели работы двигателя, но и время включения и работы жатки, молотьбу, загрузку бункера и т.д.
Плюсы и минусы CAN-шин
У интерфейса есть свои преимущества, и недостатки. Плюсы CAN-шины:
- Вы можете самостоятельно выбрать важные показатели и настроить их контроль;
- Простая установка;
- Быстрый обмен информацией;
- Защита от несанкционированного доступа.

Возможные минусы СAN-шин:
- Бывают ограничения объемов передаваемых данных;
- Если используется протокол высшего уровня, возможно возникновение проблем, связанных с отсутствием стандартизации кодировки передаваемых данных.
Установка CAN-шины на технику
Установка CAN шины на технику, независимо от ее предназначения, нужно доверять настоящим профессионалам своего дела. Специалисты нашей компании microtronic.com.ua имеют большой опыт работы с сельскохозяйственным и грузовым транспортом, поэтому окажут услуги по быстрой и правильной установке CAN-шины. По всем интересующим вопросам вы можете обратиться по указанным на сайте контактным данным к нашим менеджерам.
- Prev
- Next
Что такое CAN-шина или CAN интерфейс?
На главную страницу Решения Что такое CAN-шина или CAN интерфейс?
Решения
- ► Основные услуги
- ▪ Дисплей
- ▪ Интерфейс
- ▪ Индивидуальные тач панели
- ▪ Спецпокрытия для поверхности дисплеев
- ▪ Оптическая склейка
- ▪ GUI Builder
- ► Применение в различных отраслях промышленности
- ▪ Зарядные станции
- ▪ Развлечения
- ▪ Архитектура
- ▪ Промышленность
- ▪ Энергетика
- ▪ Ритейл
September 30,2021
Описание
Предисловие
Winstar продолжает предоставлять клиентам комплексные сервисные решения и, соответственно, активно запускает продукты серии Smart Display. Запуск первого Smart Display на основе CAN-шины создана в качестве отправной точки.
Запуск первого Smart Display на основе CAN-шины создана в качестве отправной точки.
Что такое интерфейс CAN? Как он работает? Какие типы Преимущества, которые он может принести пользователям? Давайте прочитаем дополнительную информацию ниже.
Вступление
CAN (Controller Area Network) – это многофункциональный стандарт автомобильной шины. Он разработан, чтобы позволить ЭБУ (электронный блок управления) обмениваться в сети данными друг с другом без необходимости в хосте, в отличие от интерфейса RS485, он в основном должен иметь хост (Master) в качестве управляющей стороны; но CAN обеспечивает лучшие и гибкие коммуникационные приложения, которые не требуют управления хостом.
Схема топологии RS485
Схема топологии CAN-шины
CAN (англ. Controller Area Network — сеть контроллеров) — стандарт промышленной сети, ориентированный, прежде всего, на объединение в единую сеть различных исполнительных устройств и датчиков. В соответствии с содержанием информации он использует идентификатор сообщения (каждый идентификатор уникален во всей сети), чтобы определить порядок приоритета сообщений для доставки, а не назначать конкретный адрес станции (ID узла).
В соответствии с содержанием информации он использует идентификатор сообщения (каждый идентификатор уникален во всей сети), чтобы определить порядок приоритета сообщений для доставки, а не назначать конкретный адрес станции (ID узла).
Таким образом, CAN обладает хорошими возможностями гибкой настройки и может добавлять узлы в существующую сеть без внесения изменений в программное и аппаратное обеспечение. Кроме того, передача сообщений не основана на специальных типах узлов, что увеличивает удобство обновления сети.
Приложения CAN-шины могут полностью удовлетворить запросы надежности и передачи данных в реальном времени. По этой причине применение CAN-шины было распространено на промышленные медицинские и другие приложения.
Схема сетевой топологии:
История
Компания BOSCH разработала шину CAN в 1983 году. О CAN было официально объявлено на собрании Международного общества инженеров автомобильной промышленности (SAE), состоявшемся в Детройте, штат Мичиган, США, в 1986 году. Первый контроллер CAN был произведен Intel и Philips и выпущен в 1987 году. Первым автомобилем, оснащенным многополюсной системой на базе CAN, был Mercedes-Benz W140, выпущенный в 1991 году.
Первый контроллер CAN был произведен Intel и Philips и выпущен в 1987 году. Первым автомобилем, оснащенным многополюсной системой на базе CAN, был Mercedes-Benz W140, выпущенный в 1991 году.
Компания BOSCH опубликовала несколько версий спецификации CAN. Спецификация разделена на две части: часть A (CAN 2.0A) применяется к стандартному формату с использованием 11-битных идентификационных кодов, а часть B (CAN 2.0 Б) применяется к расширенному формату с использованием 29-битных идентификаторов.
В 1993 году Международная организация по стандартизации (ISO) опубликовала стандарт CAN ISO11898. Позже стандарт CAN был перекомпилирован в две части: ISO11898-1 охватывал уровень канала передачи данных; ISO11898-2 охватывал физический уровень высокоскоростной CAN. bus; ISO11898-3 был анонсирован позже и охватывал спецификацию низкоскоростной шины CAN Физический уровень и отказоустойчивость шины CAN. Стандарты физического уровня ISO11898-2 и ISO11898-3 не включены в спецификацию BOSCH CAN2. 0.
0.
В 2012 году компания BOSCH анонсировала CAN_FD 1.0, или CAN с переменной скоростью передачи данных. В этой спецификации используется другая архитектура, позволяющая после арбитража переключаться на более высокую скорость передачи данных и передавать данные различной длины. CAN FD совместим с существующей сетью CAN 2.0, поэтому новое устройство CAN FD может сосуществовать с существующим устройством CAN в одной сети управления.
С 1996 года все автомобили и легкие грузовики, продаваемые в Соединенных Штатах, обязали соответствовать стандартам OBD-II (бортовая диагностика). В Европейском союзе бензиновые автомобили, проданные после 2001 года, и дизельные автомобили, проданные после 2004 года, должны соответствовать требованиям EOBD (Европейская бортовая диагностика) стандартов. С 2008 года, все автомобили продаваемые в США, должны использовать CAN в качестве одного из протоколов сигнализации.
Опции
Особенности аппаратного обеспечения:
Все узлы соединены между собой двумя проводами, образующими витую пару с сопротивлением 120 Ом.
Когда шина CAN передает доминирующий (0) сигнал, она поднимает клемму CAN_H на высокий уровень и переводит CAN_L на низкий уровень. Когда передается рецессивный сигнал (1), клемма CAN_H или CAN_L не будет работать. Доминирующий сигнал CAN_H и CAN_L имеют номинальное дифференциальное напряжение 2 В.
Внешний вид сигнала физического уровня:
Измерения на WL0F00039000QGAAASB00 CAN_H / CAN_L:
Особенности прошивки:
Каждый узел может отправлять и получать информацию, но не одновременно. Сообщение или кадр в основном включает в себя идентификационный код (ID), который указывает приоритет информации, до восьми байтов данных. CRC, ACK и другие части кадра являются также часть сообщения.
Если один узел передает доминантный бит (0), а другой узел передает рецессивный бит (1), то на шине возникает конфликт, и в конечном итоге доминирующий бит «выигрывает». Это означает, что нет задержки в передаче информации с более высоким приоритетом. Информация об узлах с более низким приоритетом автоматически передается в конце доминирующего бита, а повторная передача предпринимается после 6 тактовых бит. Это делает CAN пригодной в качестве системы связи с мгновенным приоритетом.
Информация об узлах с более низким приоритетом автоматически передается в конце доминирующего бита, а повторная передача предпринимается после 6 тактовых бит. Это делает CAN пригодной в качестве системы связи с мгновенным приоритетом.
Точное напряжение логического 0 или 1 зависит от используемого физического уровня, но основной принцип CAN требует, чтобы каждый узел контролировал данные в сети CAN, включая сам узел-отправитель. Если все узлы передают логическую 1 одновременно время, все узлы будут видеть этот сигнал логической 1, включая отправляющий узел и принимающий узел. Если все отправляющие узлы передают сигнал логического 0 одновременно, то все узлы будут видеть этот сигнал логического 0. Когда один или несколько отправляющих узлов передают сигнал логического 0, но один или несколько узлов-отправителей передают сигнал логической 1, все узлы, включая узел, который передает сигнал логической 1, также будут видеть сигнал логической 0. Когда узел передает сигнал логической 1, но видит сигнал логического 0, он поймет, что на линии возник спор, и выйдет из системы. В ходе этого процесса любой узел, который передает логику 1, выходит из системы или проигрывает арбитраж, когда другие узлы передают логику 0. Узел, проигравший арбитраж, повторно добавить информацию в очередь позже, и поток битов кадра CAN будет продолжаться без сбоев, пока не останется только один узел-отправитель. Это означает, что узел, который передает первую логическую единицу, теряет арбитраж. Поскольку все узлы передают 11-битный (или 29-битный в CAN 2.0 B) идентификационный код: при запуске кадра CAN отправляющий узел с наименьшим идентификационным кодом имеет в начале больше 0. Этот узел побеждает в арбитраже и имеет наивысший приоритет.
В ходе этого процесса любой узел, который передает логику 1, выходит из системы или проигрывает арбитраж, когда другие узлы передают логику 0. Узел, проигравший арбитраж, повторно добавить информацию в очередь позже, и поток битов кадра CAN будет продолжаться без сбоев, пока не останется только один узел-отправитель. Это означает, что узел, который передает первую логическую единицу, теряет арбитраж. Поскольку все узлы передают 11-битный (или 29-битный в CAN 2.0 B) идентификационный код: при запуске кадра CAN отправляющий узел с наименьшим идентификационным кодом имеет в начале больше 0. Этот узел побеждает в арбитраже и имеет наивысший приоритет.
CAN2.0A / B Формат данных:
Данные трафика CAN-шины выглядят как:
Последовательности данных в полезной нагрузке:
Выводы:
5 особенностей, которая предоставляет CAN-шина.

- Низкая стоимость: ЭБУ (электронные блоки управления) обмениваются данными через единый интерфейс CAN, CAN шина обеспечивает сокращение проблем, легкий вес и низкую стоимость.
- Сосредоточенность: система CAN-шины позволяет проводить централизованную диагностику ошибок (например, OBD-II) и конфигурировать все ЭБУ.
- Надежность: физический уровень системы устойчив к отказам подсистем и ЭМС (электромагнитной совместимости).
- Эффективность: сообщения CAN имеют приоритет и используют побитовый арбитраж через идентификаторы, так что идентификаторы с наивысшим приоритетом не прерываются.
- Гибкость: каждый ЭБУ содержит микросхему для приема всех передаваемых сообщений, определения актуальности и соответствующих действий – это позволяет легко изменять и включать дополнительные узлы.
Примеры применения:
- Автомобильная промышленность (автомобильные приборы, ABS, OBD-II и т.
 д.).
д.). - Транспортные системы (железнодорожные, авиационные, морские и т. д.).
- Мобильная техника (штабелеукладчики / вилочные погрузчик, строительство, сельское хозяйство и т. д.).
- Системы управления промышленными машинами (промышленная автоматизация, управление информацией и т. Д.).
- Автоматизация дома и зданий (HVAC, лифты и т. Д.).
- Медицинское оборудование и лабораторная автоматизация.
Ограничения:
- В CAN open имеется 11-битный CAN ID с 4-битным функциональным кодом и 7-битным идентификатором узла. Таким образом, уникальные адреса доступны для 127 узлов на шине.
- В J1939 есть 8-битный адрес устройства, который максимально равен 255 идентификатору узла. Адрес 255 используется для широковещательной рассылки, а 254 зарезервирован для управления сетью. Таким образом, уникальные адреса доступны для 253 узлов на шине.
- Пропускная способность связи низкая, а скорость высока по сравнению с дальностью передачи.

Если у Вас есть какие-либо вопросы или предложения, пожалуйста свяжитесь с нами!
Подписка
Подписаться на рассылку новостей Winstar
Свяжитесь с нами
Цена/Даташит/Общий запрос
Техподдержка
Служба поддержки Winstar
Поставщики беспроводных радиочастот и ресурсы
Веб-сайт RF Wireless World является домом для поставщиков и ресурсов RF и Wireless. На сайте представлены статьи, учебные пособия, поставщики, терминология, исходный код (VHDL, Verilog, MATLAB, Labview), тесты и измерения, калькуляторы, новости, книги, загрузки и многое другое.
Сайт RF Wireless World охватывает ресурсы по различным темам, таким как RF, беспроводная связь, vsat, спутник, радар, оптоволокно, микроволновая печь, wimax, wlan, zigbee,
LTE, 5G NR, GSM, GPRS, GPS, WCDMA, UMTS, TDSCDMA, Bluetooth, Lightwave RF, z-wave, Интернет вещей (IoT), M2M, Ethernet и т. д.
Эти ресурсы основаны на стандартах IEEE и 3GPP. Он также имеет академический раздел, который охватывает колледжи и университеты по инженерным дисциплинам и дисциплинам MBA.
Он также имеет академический раздел, который охватывает колледжи и университеты по инженерным дисциплинам и дисциплинам MBA.
Статьи о системах на основе IoT
Система обнаружения падений для пожилых людей на основе IoT : В статье рассматривается архитектура системы обнаружения падений, используемой для пожилых людей.
В нем упоминаются преимущества или преимущества системы обнаружения падения IoT.
Подробнее➤
См. также другие статьи о системах на основе IoT:
• Система очистки туалетов AirCraft.
• Система измерения удара при столкновении
• Система отслеживания скоропортящихся продуктов и овощей
• Система помощи водителю
• Система умной розничной торговли
• Система мониторинга качества воды
• Система интеллектуальной сети
• Умная система освещения на основе Zigbee
• Умная система парковки на базе Zigbee
• Умная система парковки на базе LoRaWAN.
Радиочастотные беспроводные изделия
Этот раздел статей охватывает статьи о физическом уровне (PHY), уровне MAC, стеке протоколов и сетевой архитектуре на основе WLAN, WiMAX, zigbee, GSM, GPRS, TD-SCDMA, LTE, 5G NR, VSAT, Gigabit Ethernet на основе IEEE/3GPP и т. д. , стандарты.
Он также охватывает статьи, связанные с испытаниями и измерениями, посвященные испытаниям на соответствие, используемым для испытаний устройств на соответствие RF/PHY. СМ. УКАЗАТЕЛЬ СТАТЕЙ >>.
Физический уровень 5G NR : Обработка физического уровня для канала 5G NR PDSCH и канала 5G NR PUSCH была рассмотрена поэтапно. Это описание физического уровня 5G соответствует спецификациям физического уровня 3GPP. Подробнее➤
Основные сведения о повторителях и типы повторителей : В нем объясняются функции различных типов повторителей, используемых в беспроводных технологиях. Подробнее➤
Основы и типы замираний : В этой статье рассматриваются мелкомасштабные замирания, крупномасштабные замирания, медленные замирания, быстрые замирания и т. д., используемые в беспроводной связи. Подробнее➤
Архитектура сотового телефона 5G : В этой статье рассматривается блок-схема сотового телефона 5G с внутренними модулями 5G. Архитектура сотового телефона.
Подробнее➤
Основы помех и типы помех: В этой статье рассматриваются помехи по соседнему каналу, помехи в одном канале, Электромагнитные помехи, ICI, ISI, световые помехи, звуковые помехи и т. д. Подробнее➤
Раздел 5G NR
В этом разделе рассматриваются функции 5G NR (новое радио), нумерология, диапазоны, архитектура, развертывание, стек протоколов (PHY, MAC, RLC, PDCP, RRC) и т. д.
5G NR Краткий справочный указатель >>
• Мини-слот 5G NR
• Часть полосы пропускания 5G NR
• БАЗОВЫЙ НАБОР 5G NR
• Форматы 5G NR DCI
• 5G NR UCI
• Форматы слотов 5G NR
• IE 5G NR RRC
• 5G NR SSB, SS, PBCH
• 5G NR PRACH
• 5G NR PDCCH
• 5G NR PUCCH
• Опорные сигналы 5G NR
• 5G NR m-Sequence
• Золотая последовательность 5G NR
• 5G NR Zadoff Chu Sequence
• Физический уровень 5G NR
• MAC-уровень 5G NR
• Уровень 5G NR RLC
• Уровень PDCP 5G NR
Учебники по беспроводным технологиям
В этом разделе рассматриваются учебные пособия по радиочастотам и беспроводным сетям. Он охватывает учебные пособия по таким темам, как
сотовая связь, WLAN (11ac, 11ad), wimax, bluetooth, zigbee, zwave, LTE, DSP, GSM, GPRS,
GPS, UMTS, CDMA, UWB, RFID, радар, VSAT, спутник, беспроводная сеть, волновод, антенна, фемтосота, тестирование и измерения, IoT и т. д.
См. ИНДЕКС УЧЕБНЫХ ПОСОБИЙ >>
Учебное пособие по 5G — В этом учебном пособии по 5G также рассматриваются следующие подтемы, посвященные технологии 5G:
Учебник по основам 5G
Диапазоны частот
учебник по миллиметровым волнам
Рамка волны 5G мм
Зондирование канала миллиметровых волн 5G
4G против 5G
Испытательное оборудование 5G
Архитектура сети 5G
Сетевые интерфейсы 5G NR
звучание канала
Типы каналов
5G FDD против TDD
Нарезка сети 5G NR
Что такое 5G NR
Режимы развертывания 5G NR
Что такое 5G ТФ
В этом учебнике GSM рассматриваются основы GSM, сетевая архитектура, сетевые элементы, системные спецификации, приложения,
Типы пакетов GSM, структура кадров GSM или иерархия кадров, логические каналы, физические каналы,
Физический уровень GSM или обработка речи, вход в сеть мобильного телефона GSM или настройка вызова или процедура включения питания,
Вызов MO, вызов MT, модуляция VAMOS, AMR, MSK, GMSK, физический уровень, стек протоколов, основы мобильного телефона,
Планирование RF, нисходящая линия связи PS и восходящая линия связи PS.
➤Читать дальше.
LTE Tutorial , описывающий архитектуру системы LTE, включая основы LTE EUTRAN и LTE Evolved Packet Core (EPC). Он предоставляет ссылку на обзор системы LTE, радиоинтерфейс LTE, терминологию LTE, категории LTE UE, структуру кадра LTE, физический уровень LTE, Стек протоколов LTE, каналы LTE (логические, транспортные, физические), пропускная способность LTE, агрегация несущих LTE, Voice Over LTE, расширенный LTE, Поставщики LTE и LTE vs LTE advanced.➤Подробнее.
Радиочастотные технологии Материал
На этой странице мира беспроводных радиочастот описывается пошаговое проектирование преобразователя частоты на примере повышающего преобразователя частоты 70 МГц в диапазон C.
для микрополосковой платы с использованием дискретных радиочастотных компонентов, а именно. Смесители, гетеродин, MMIC, синтезатор, опорный генератор OCXO,
амортизирующие прокладки. ➤Читать дальше.
➤ Проектирование и разработка РЧ приемопередатчика
➤Дизайн радиочастотного фильтра
➤Система VSAT
➤Типы и основы микрополосковых
➤Основы волновода
Секция испытаний и измерений
В этом разделе рассматриваются ресурсы по контролю и измерению, контрольно-измерительное оборудование для тестирования тестируемых устройств на основе
Стандарты WLAN, WiMAX, Zigbee, Bluetooth, GSM, UMTS, LTE. ИНДЕКС испытаний и измерений >>
➤Система PXI для контрольно-измерительных приборов.
➤ Генерация и анализ сигналов
➤ Измерения физического уровня
➤ Тестирование устройства WiMAX на соответствие
➤ Тест на соответствие Zigbee
➤ Тест на соответствие LTE UE
➤ Тест на соответствие TD-SCDMA
Волоконно-оптические технологии
Волоконно-оптический компонент основы, включая детектор, оптический соединитель, изолятор, циркулятор, переключатели, усилитель,
фильтр, эквалайзер, мультиплексор, разъемы, демультиплексор и т. д. Эти компоненты используются в оптоволоконной связи.
ИНДЕКС оптических компонентов >>
➤Руководство по оптоволоконной связи
➤APS в SDH
➤Основы SONET
➤ Структура кадра SDH
➤ SONET против SDH
Поставщики беспроводных радиочастот, производители
Сайт RF Wireless World охватывает производителей и поставщиков различных радиочастотных компонентов, систем и подсистем для ярких приложений,
см. ИНДЕКС поставщиков >>.
Поставщики ВЧ-компонентов, включая ВЧ-изолятор, ВЧ-циркулятор, ВЧ-смеситель, ВЧ-усилитель, ВЧ-адаптер, ВЧ-разъем, ВЧ-модулятор, ВЧ-трансивер, PLL, VCO, синтезатор, антенну, осциллятор, делитель мощности, сумматор мощности, фильтр, аттенюатор, диплексер, дуплексер, чип-резистор, чип-конденсатор, чип-индуктор, ответвитель, ЭМС, программное обеспечение RF Design, диэлектрический материал, диод и т. д.
Поставщики радиочастотных компонентов >>
➤Базовая станция LTE
➤ РЧ-циркулятор
➤РЧ-изолятор
➤Кристаллический осциллятор
MATLAB, Labview, Embedded Исходные коды
Раздел исходного кода RF Wireless World охватывает коды, связанные с языками программирования MATLAB, VHDL, VERILOG и LABVIEW.
Эти коды полезны для новичков в этих языках.
СМОТРИТЕ ИНДЕКС ИСТОЧНИКОВ >>
➤ 3–8 код декодера VHDL
➤Скремблер-дескремблер Код MATLAB
➤32-битный код ALU Verilog
➤ T, D, JK, SR триггер коды labview
*Общая медицинская информация*
Сделайте эти пять простых вещей, чтобы помочь остановить коронавирус (COVID-19).
СДЕЛАЙТЕ ПЯТЬ
1. РУКИ: Мойте их часто
2. ЛОКОТЬ: кашляйте в него
3. ЛИЦО: Не прикасайтесь к нему
4. НОГИ: Держитесь на расстоянии более 3 футов (1 м) друг от друга
5. ЧУВСТВУЙТЕ: Болен? Оставайтесь дома
Используйте технологию отслеживания контактов >> , следуйте рекомендациям по социальному дистанцированию >> и установить систему наблюдения за данными >> спасти сотни жизней. Использование концепции телемедицины стало очень популярным в таких стран, как США и Китай, чтобы остановить распространение COVID-19так как это заразное заболевание.
Радиочастотные калькуляторы и преобразователи
Раздел «Калькуляторы и преобразователи» охватывает ВЧ-калькуляторы, беспроводные калькуляторы, а также преобразователи единиц измерения.
Они охватывают беспроводные технологии, такие как GSM, UMTS, LTE, 5G NR и т. д.
СМ. КАЛЬКУЛЯТОРЫ Указатель >>.
➤Калькулятор пропускной способности 5G NR
➤ 5G NR ARFCN и преобразование частоты
➤ Калькулятор скорости передачи данных LoRa
➤ LTE EARFCN для преобразования частоты
➤ Калькулятор антенны Yagi
➤ Калькулятор времени выборки 5G NR
IoT-Интернет вещей Беспроводные технологии
В разделе, посвященном IoT, рассматриваются беспроводные технологии Интернета вещей, такие как WLAN, WiMAX, Zigbee, Z-wave, UMTS, LTE, GSM, GPRS, THREAD, EnOcean, LoRa, SIGFOX, WHDI, Ethernet,
6LoWPAN, RF4CE, Bluetooth, Bluetooth с низким энергопотреблением (BLE), NFC, RFID, INSTEON, X10, KNX, ANT+, Wavenis, Dash7, HomePlug и другие.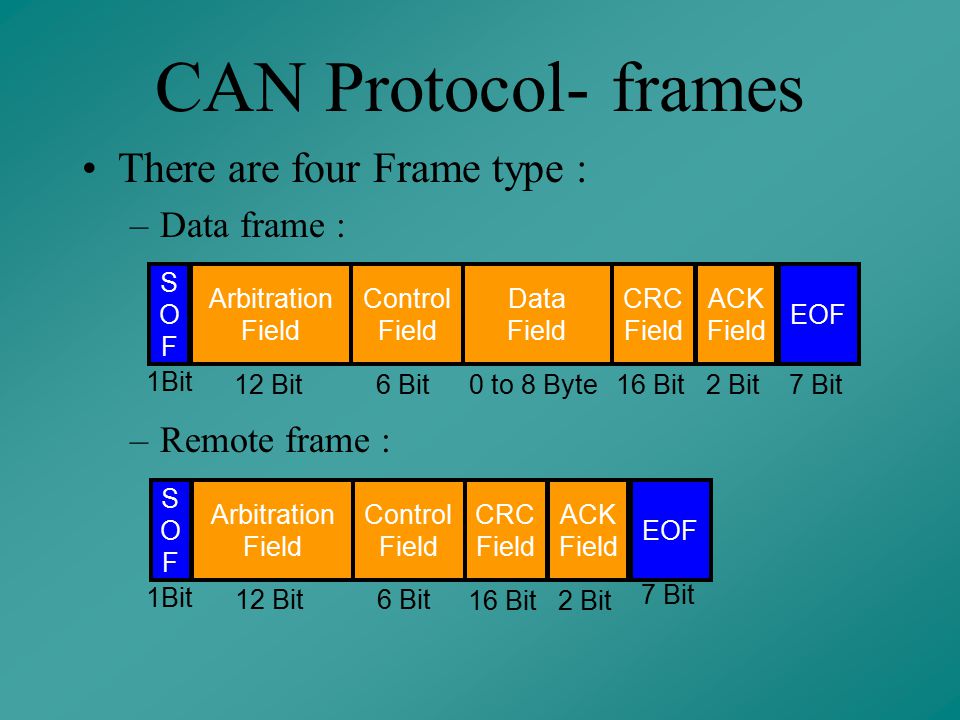 Он также охватывает датчики IoT, компоненты IoT и компании IoT.
Он также охватывает датчики IoT, компоненты IoT и компании IoT.
См. главную страницу IoT>> и следующие ссылки.
➤РЕЗЬБА
➤EnOcean
➤ Учебник LoRa
➤ Учебник по SIGFOX
➤ WHDI
➤6LoWPAN
➤Зигби RF4CE
➤NFC
➤Лонворкс
➤CEBus
➤УПБ
СВЯЗАННЫЕ ПОСТЫ
Учебники по беспроводным радиочастотам
GSM ТД-СКДМА ваймакс LTE UMTS GPRS CDMA SCADA беспроводная сеть 802.11ac 802.11ad GPS Зигби z-волна Bluetooth СШП Интернет вещей Т&М спутник Антенна РАДАР RFID
Различные типы датчиков
Датчик приближения Датчик присутствия против датчика движения Датчик LVDT и RVDT Датчик положения, смещения и уровня датчик силы и датчик деформации Датчик температуры датчик давления Датчик влажности датчик МЭМС Сенсорный датчик Тактильный датчик Беспроводной датчик Датчик движения Датчик LoRaWAN Световой датчик Ультразвуковой датчик Датчик массового расхода воздуха Инфразвуковой датчик Датчик скорости Датчик дыма Инфракрасный датчик Датчик ЭДС Датчик уровня Активный датчик движения против пассивного датчика движения
Поделиться этой страницей
Перевести эту страницу
СТАТЬИ
Раздел T&M
ТЕРМИНОЛОГИИ
Учебники
Работа и карьера
ПОСТАВЩИКИ
Интернет вещей
Онлайн калькуляторы
исходные коды
ПРИЛОЖЕНИЕ. ПРИМЕЧАНИЯ
Всемирный веб-сайт T&M
ПРИМЕЧАНИЯ
Всемирный веб-сайт T&M
(CAN)
CAN имеет несколько различных физических уровней, которые вы можете использовать. Эти физические уровни классифицируют определенные аспекты сети CAN, такие как электрические уровни, схемы сигнализации, импеданс кабеля, максимальные скорости передачи и многое другое. Наиболее распространенные и широко используемые физические уровни описаны ниже:
Высокоскоростной CAN на сегодняшний день является наиболее распространенным физическим уровнем. Высокоскоростные сети CAN реализованы двухпроводными и позволяют осуществлять связь со скоростью передачи до 1 Мбит/с. Другие названия высокоскоростного CAN включают CAN C и ISO 11898-2. Типичные высокоскоростные устройства CAN включают антиблокировочную систему тормозов, модули управления двигателем и системы выбросов. CAN с гибкой скоростью передачи данных (CAN FD) — это следующее поколение высокоскоростной связи CAN с развивающимися стандартами для более высоких скоростей передачи данных. NI обеспечивает скорость до 8 Мбит/с, используя приемопередатчики TJA1041 и TJA1043 через драйвер NI-XNET. По мере того, как поставщики приемопередатчиков завершат квалификацию для скоростей CAN FD, NI будет обновлять нашу документацию по мере необходимости.
NI обеспечивает скорость до 8 Мбит/с, используя приемопередатчики TJA1041 и TJA1043 через драйвер NI-XNET. По мере того, как поставщики приемопередатчиков завершат квалификацию для скоростей CAN FD, NI будет обновлять нашу документацию по мере необходимости.
Низкоскоростные/отказоустойчивые сети CAN также реализованы с двумя проводами, могут обмениваться данными с устройствами на скорости до 125 кбит/с и предлагают приемопередатчики с отказоустойчивостью. толерантные способности. Другие названия низкоскоростной/отказоустойчивой CAN включают CAN B и ISO 11898-3. Типичные низкоскоростные/отказоустойчивые устройства в автомобиле включают в себя устройства комфорта. Провода, которые должны проходить через дверь транспортного средства, являются низкоскоростными/отказоустойчивыми в свете нагрузки, присущей открытию и закрытию двери. Кроме того, в ситуациях, когда желателен повышенный уровень безопасности, например, со стоп-сигналами, низкоскоростная/отказоустойчивая CAN предлагает решение.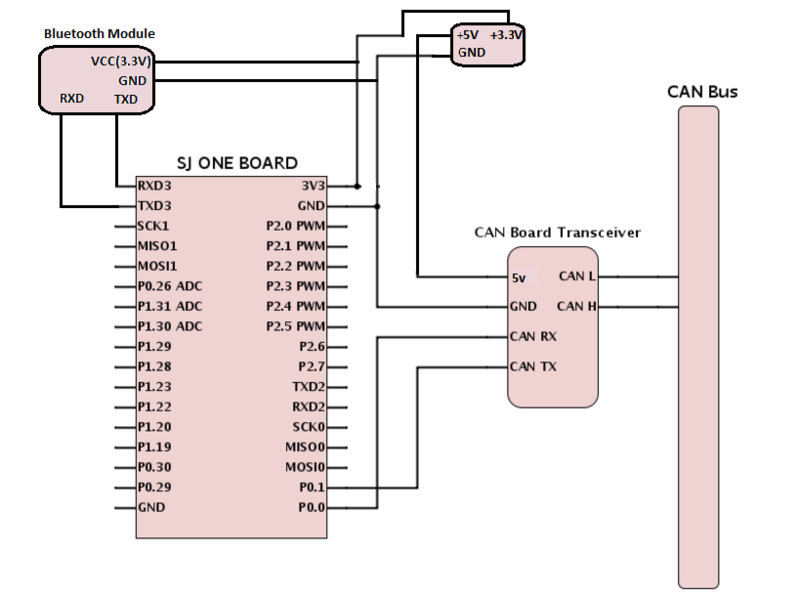
Однопроводные интерфейсы CAN могут обмениваться данными с устройствами на скорости до 33,3 кбит/с (88,3 кбит/с в высокоскоростном режиме). Другие названия однопроводной CAN включают SAE-J2411, CAN A и GMLAN. Типичные однопроводные устройства в автомобиле не требуют высокой производительности. Общие области применения включают устройства обеспечения комфорта, такие как регуляторы сидений и зеркал.
Аппаратное обеспечение CAN, выбираемое программным обеспечением С помощью аппаратных средств CAN National Instruments вы можете настроить интерфейсы CAN, выбираемые программным обеспечением, для использования любого из встроенных приемопередатчиков (высокоскоростной, низкоскоростной/отказоустойчивый или одноканальный). провод CAN). Аппаратное обеспечение с несколькими приемопередатчиками предлагает идеальное решение для приложений, требующих сочетания стандартов связи. С аппаратным обеспечением CAN, выбираемым программным обеспечением, вы также можете выбрать свой собственный внешний приемопередатчик CAN.
Программное обеспечение NI-XNET входит в комплект поставки устройств PCI/PXI-851x и NI 986x и доступно для бесплатной загрузки на сайте ni.com. Этот новый драйвер используется для разработки приложений CAN, локальной межсоединенной сети (LIN) и FlexRay в NI LabVIEW, NI LabWindows/CVI и C/C++ в ОС Windows и LabVIEW Real-Time OS. Являясь частью платформы NI-XNET, устройства NI 851x и NI 986x хорошо работают для приложений, требующих высокоскоростной обработки в реальном времени сотен кадров и сигналов, таких как аппаратное моделирование в цикле, быстрое прототипирование управления, мониторинг шины, управление автоматикой и многое другое.
NI-XNET: один API, множество встроенных сетейПлатформа NI-XNET сочетает в себе ряд высокопроизводительных интерфейсов CAN, LIN и FlexRay с NI-XNET API, общим набором простых в использовании используйте функции для чтения и записи кадров и сигналов CAN, LIN и FlexRay.
Высочайшая производительность при минимальном программировании Интерфейсы NI-XNET объединяют в себе производительность, связанную с низкоуровневым программированием микроконтроллеров, а также скорость и мощь разработки ОС Windows и LabVIEW Real-Time. Запатентованный механизм DMA NI-XNET, управляемый устройствами, снижает системную задержку, общую проблему для интерфейсов CAN на базе ПК, с миллисекунд до микросекунд. Механизм позволяет встроенному процессору перемещать кадры и сигналы CAN между интерфейсом и пользовательской программой без прерывания ЦП, освобождая время хост-процессора для обработки сложных моделей и приложений.
Запатентованный механизм DMA NI-XNET, управляемый устройствами, снижает системную задержку, общую проблему для интерфейсов CAN на базе ПК, с миллисекунд до микросекунд. Механизм позволяет встроенному процессору перемещать кадры и сигналы CAN между интерфейсом и пользовательской программой без прерывания ЦП, освобождая время хост-процессора для обработки сложных моделей и приложений.
Для получения дополнительной информации о преимуществах и приложениях NI-XNET см. Обзор платформы NI-XNET CAN, LIN и FlexRay.
Драйвер программного обеспечения NI-CAN Компания National Instruments включает программное обеспечение драйвера NI-CAN со всеми устаревшими интерфейсами CAN National Instruments и предоставляет его для бесплатной загрузки на сайте ni.com. С другими интерфейсами CAN вы можете воспользоваться лишь небольшим процентом функциональности платы, если не приобретете готовый программный инструмент. Тем не менее, все функциональные возможности платы CAN National Instruments полностью открыты, поэтому вы можете разрабатывать свои собственные приложения на выбранном вами языке программирования.
