Переключение – число – пары – полюс
Cтраница 1
| Механические характеристики двухскоростного асинхронного двигателя. [1] |
Переключение числа пар полюсов достигается изменением схемы соединения статорной обмотки. Роторы многоскоростных двигателей выполняются короткозамкнутыми. На рис. 3 – 18 приведены механические характеристики двухскоростного двигателя. Переход с высшей скорости вращения на низшую при переключении числа пар полюсов, как показано на графике, сопровождается торможением с отдачей энергии в сеть. Механические характеристики сохраняют свою жесткость при переходе с одной скорости вращения на другую. [2]
Схема реверсирования трехфазного, асинхронного электродви гателя.| Механические характеристики трехфазного асинхронного электродвигателя при регулировании угловой скорости ротора изменением частоты переменного тока. |
Переключение числа пар полюсов асинхронных электродвигателей обеспечивает ступенчатое регулирование частоты вращения, жесткие механические характеристики и отличается экономичностью. [4]
Переключение числа пар полюсов асинхронного электродвигателя дает ступенчатое регулирование скорости вращения, жесткие механические характеристики и отличается экономичностью. [5]
Путем переключения числа пар полюсов можно изменять частоту вращения только большими ступенями, например: 3000, 1500, 1000, 500 об / мин. Возможность изменения числа пар полюсов в одном двигателе достигается усложнением его устройства, увеличением размеров и значительным повышением стоимости. Поэтому многоскоростные двигатели строят не более чем на четыре скорости. [6]
| Переключение числа полюсов при различном соединении секций.| Включение [ IMAGE ] Включение обмоток по схеме обмоток по схеме звезды двойной звезды. |
Возможность переключения числа пар полюсов путем изменения схемы обмотки иллюстрирует рис. 3.65. При соединении секций обмотки, как показано на рис. 3.65, а, получают четыре полюса, а по схеме рис. 3.65, б – два. Такие переключения производят в трех фазах, а переключаемые части обмоток могут соединяться параллельно или последовательно. [8]
Регулирование переключением числа пар полюсов является сравнительно простым способом, не требующим больших капитальных затрат. Экономичность регулирования весьма высока. Скорость при регулировании меняется не плавно, а ступенями. Уменьшение синхронной скорости ниже 300 – 375 об / мин обычно не производится, так как оно приводит к значительному увеличению габаритов двигателей. [9]
| Процесс регулирования скорости электродвигателя. [10] |
Электродвигатели с переключением числа пар полюсов поля статора изготовляются на две, три и четыре скорости. [11]
[11]
Регулирование скорости двигателей переключением числа пар полюсов возможно лишь в двигателе с короткозамкнутым ротором, так как только у этого двигателя число полюсов ротора всегда соответствует числу полюсов статора. [12]
| Схема включения тепловых реле в обмотку статора двигателя, пуск которого осуществляется переключением звезды на треугольник. а-соединение в зоезду. b – в треугольник. [13] |
У двигателей с переключением числа пар полюсов случается, что токи в подводящей линии и в самой обмотке при разной скорости вращения ротора значительно отличаются друг от друга. [14]
Получение пониженной скорости путем переключения числа пар полюсов осуществляется в многоскоростном двигателе; при этом величина рабочей скорости определяется известным рядом синхронных скоростей: 3000, 1 500, 1 000, 750 и 500 об / мин. Двигатели со скоростями, меньшими 500 об / мин, редко изготовляются, следовательно, начальная скорость перед окончательным торможением может быть снижена максимум в 6 раз.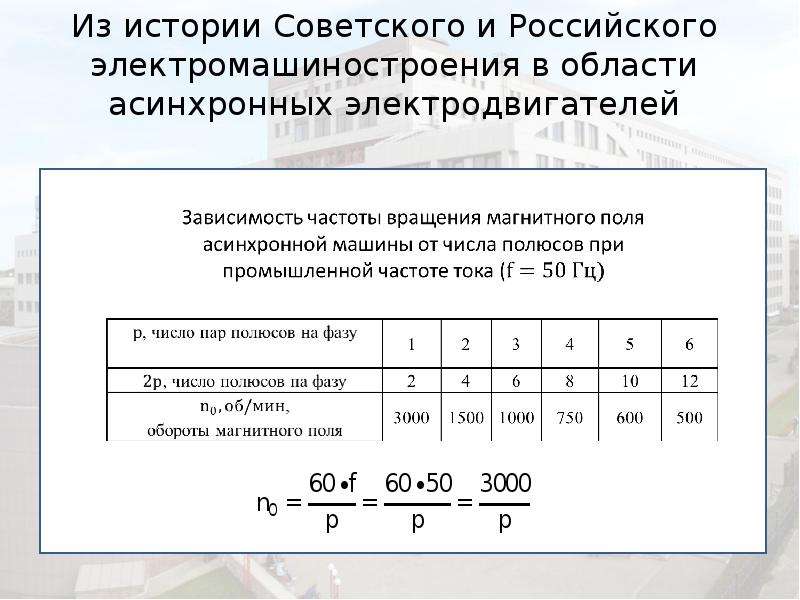 [15]
[15]
Страницы: 1 2 3 4
Регулирование угловой скорости асинхронного электродвигателя изменением числа пар полюсов на статоре
Переключение — число — пары — полюс
| Механические характеристики двухскоростного асинхронного двигателя. |
Переключение числа пар полюсов достигается изменением схемы соединения статорной обмотки. Роторы многоскоростных двигателей выполняются короткозамкнутыми. На рис. 3 — 18 приведены механические характеристики двухскоростного двигателя. Переход с высшей скорости вращения на низшую при переключении числа пар полюсов, как показано на графике, сопровождается торможением с отдачей энергии в сеть. Механические характеристики сохраняют свою жесткость при переходе с одной скорости вращения на другую.
Схема реверсирования трехфазного, асинхронного электродви гателя. | Механические характеристики трехфазного асинхронного электродвигателя при регулировании угловой скорости ротора изменением частоты переменного тока. | Механические характеристики трехфазного асинхронного электродвигателя при регулировании угловой скорости ротора изменением частоты переменного тока. |
Переключение числа пар полюсов асинхронных электродвигателей обеспечивает ступенчатое регулирование частоты вращения, жесткие механические характеристики и отличается экономичностью.
Переключение числа пар полюсов асинхронного электродвигателя дает ступенчатое регулирование скорости вращения, жесткие механические характеристики и отличается экономичностью.
Путем переключения числа пар полюсов можно изменять частоту вращения только большими ступенями, например: 3000, 1500, 1000, 500 об / мин. Возможность изменения числа пар полюсов в одном двигателе достигается усложнением его устройства, увеличением размеров и значительным повышением стоимости. Поэтому многоскоростные двигатели строят не более чем на четыре скорости.
Переключение числа полюсов при различном соединении секций. | Включение Включение обмоток по схеме обмоток по схеме звезды двойной звезды.| Переключение обмоток с треугольника на двойную звезду. | Включение Включение обмоток по схеме обмоток по схеме звезды двойной звезды.| Переключение обмоток с треугольника на двойную звезду. |
Возможность переключения числа пар полюсов путем изменения схемы обмотки иллюстрирует рис. 3.65. При соединении секций обмотки, как показано на рис. 3.65, а, получают четыре полюса, а по схеме рис. 3.65, б — два. Такие переключения производят в трех фазах, а переключаемые части обмоток могут соединяться параллельно или последовательно.
Регулирование переключением числа пар полюсов является сравнительно простым способом, не требующим больших капитальных затрат. Экономичность регулирования весьма высока. Скорость при регулировании меняется не плавно, а ступенями. Уменьшение синхронной скорости ниже 300 — 375 об / мин обычно не производится, так как оно приводит к значительному увеличению габаритов двигателей.
Процесс регулирования скорости электродвигателя. |
Электродвигатели с переключением числа пар полюсов поля статора изготовляются на две, три и четыре скорости.
Регулирование скорости двигателей переключением числа пар полюсов возможно лишь в двигателе с короткозамкнутым ротором, так как только у этого двигателя число полюсов ротора всегда соответствует числу полюсов статора.
| Схема включения тепловых реле в обмотку статора двигателя, пуск которого осуществляется переключением звезды на треугольник. а-соединение в зоезду. b — в треугольник. |
У двигателей с переключением числа пар полюсов случается, что токи в подводящей линии и в самой обмотке при разной скорости вращения ротора значительно отличаются друг от друга.
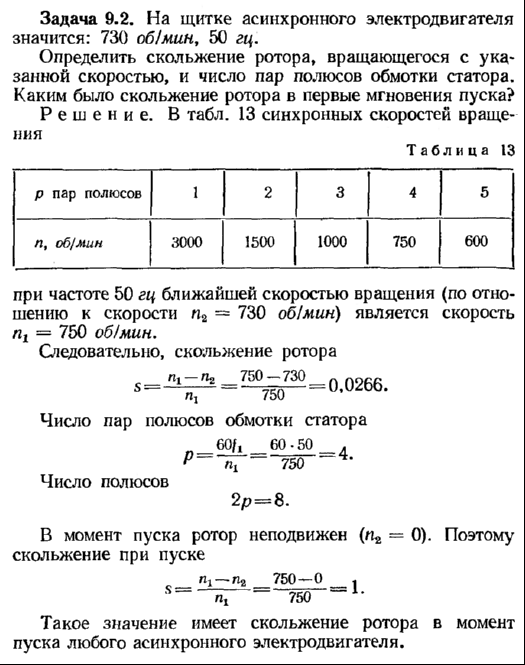
Получение пониженной скорости путем переключения числа пар полюсов осуществляется в многоскоростном двигателе; при этом величина рабочей скорости определяется известным рядом синхронных скоростей: 3000, 1 500, 1 000, 750 и 500 об / мин.
Регулирование частоты вращения изменением скольжения
Изменять скольжение асинхронного двигателя можно разными способами: изменением подводимого к статору напряжения, введением сопротивления в цепь ротора или введением в цепь ротора дополнительной ЭДС.
При изменении напряжения статора механическая характеристика двигателя изменяется, как показано на рис. 4.33. Снижение напряжения приводит к уменьшению жесткости механической характеристики и росту скольжения. При этом частота вращения ротора снижается,. Регулирование частоты вращения таким способом возможно в ограниченном диапазоне изменения скольжения. Основным недостатком этого способа регулирования частоты вращения является низкий КПД из-за роста потерь в обмотке ротора пропорционально частоте скольжения.
Поэтому он применяется только для двигателей малой мощности, работающих в системах автоматического управления.
В двигателях с фазным ротором изменить частоту вращения можно путем изменения сопротивления в роторе (рис. 4.34). Преимущество данного способа регулирования частоты состоит в том, что максимальный момент остается неизменным
Важно также отметить, что часть потерь двигателя выносится в резистор, тем самым облегчается тепловой режим двигателя. В остальном способ аналогичен предыдущему и характеризуется низким КПД., малым диапазоном регулирования, зависящим от нагрузки, и «мягкой» механической характеристикой
Чтобы повысить КПД двигателя при регулировании частоты вращения путем изменения скольжения, необходимо мощность скольжения использовать для совершения полезной работы или возвратить обратно в сеть. Схемы, реализующие эту идею, называются каскадными. Одной из распространенных схем данного типа является схема асинхронно-вентильного каскада (рис. 4.35).
 Регулирование частоты вращения осуществляется посредством изменения напряжения инвертора. Это приводит к соответствующему изменению напряжения обмотки ротора, а следовательно, и частоты вращения ротора. Мощность частоты скольжения, извлекаемая из роторной обмотки двигателя, передается в сеть через согласующий трансформатор. Достоинством каскадных схем регулирования частоты вращения асинхронных двигателей по сравнению с частотными схемами управления в статорной цепи (рис. 4.28) является то, что полупроводниковый преобразователь выполняется на мощность скольжения, а не на полную мощность двигателя
Регулирование частоты вращения осуществляется посредством изменения напряжения инвертора. Это приводит к соответствующему изменению напряжения обмотки ротора, а следовательно, и частоты вращения ротора. Мощность частоты скольжения, извлекаемая из роторной обмотки двигателя, передается в сеть через согласующий трансформатор. Достоинством каскадных схем регулирования частоты вращения асинхронных двигателей по сравнению с частотными схемами управления в статорной цепи (рис. 4.28) является то, что полупроводниковый преобразователь выполняется на мощность скольжения, а не на полную мощность двигателя Это обстоятельство особенно важно для мощных и сверхмощных приводов насосов, прессов, конвейеров, подъемных механизмов и др., где требуется ограниченный диапазон регулирования частоты вращения (2:1 и менее).
Асинхронно-вентильный каскад с неуправляемым выпрямителем допускает регулирование только вниз от синхронной частоты вращения. Если использовать управляемый выпрямитель, то можно осуществить регулирование частоты вращения вверх от синхронной
В этом случае направление передачи мощности скольжения меняется на противоположное.
- Назад
- Вперёд
Помогла ли вам статья?
Задать вопрос
Пишите ваши рекомендации и задавайте вопросы в комментариях
Электродвигатели переменного тока NORD DRIVESYSTEMS
Приводные системы NORD- Продукты
- задняя часть
- Товары
- Панель управления myNORD
- Поиск продукта
- Идентификация устройства
- Конфигуратор продукта
- Редукторы НОВЫЙ
- МАКСДРАЙВ® НОВЫЙ
- Моторы НОВЫЙ
- Приводная электроника НОВЫЙ
- Классы эффективности двигателя
- Решения
- Документация
- задняя часть
- Документация
- Панель управления myNORD
- Поиск продукта
- Идентификация устройства
- Конфигуратор продукта
- Руководства
- Каталоги
- Флаеры и брошюры
- Запчасти
- Программное обеспечение
- Чертежи
- Сертификаты
- Формы
- Карьера
- задняя часть
- Карьера
- Панель управления myNORD
- Поиск продукта
- Идентификация устройства
- Конфигуратор продукта
- комбинированные_исследования
- Бакалаврская и магистерская диссертация
- Доступные позиции
- Преимущества
- Контакт
- Компания
- задняя часть
- Компания
- Панель управления myNORD
- Поиск продукта
- Идентификация устройства
- Конфигуратор продукта
- Архив новостей
- Выставки
- О нас
- Где купить
- Партнер с НОРД
- Услуга
- Новостная рассылка
- мойНОРД
- Поиск
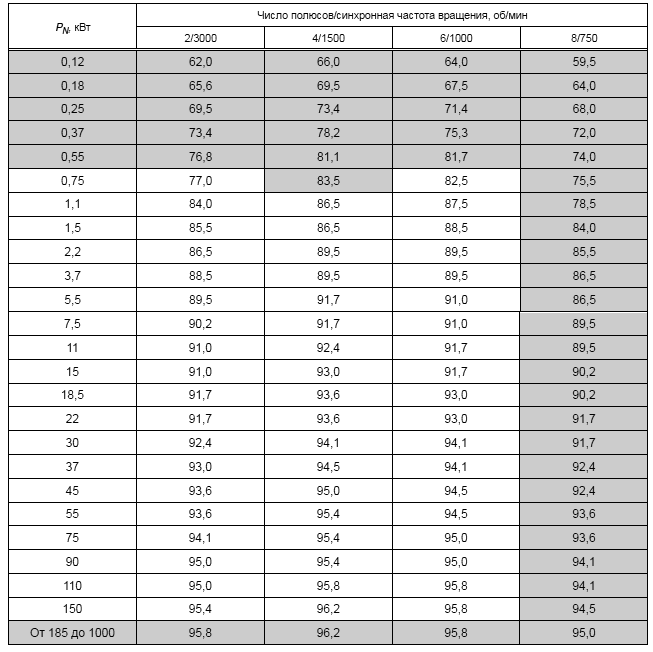
Трехфазные электродвигатели NORD обеспечивают диапазон мощности от 0,16 до 75 л. с. и чрезвычайно устойчивы к электрическим и механическим перегрузкам.
с. и чрезвычайно устойчивы к электрическим и механическим перегрузкам.
Двухскоростные двигатели
Асинхронные двигатели
- Производительность:
0,12 кВт – 17 кВт
- Класс эффективности IE1
- Глобальные одобрения и приемки
Двигатель NORD® UNIVERSAL
УНИВЕРСАЛЬНЫЕ двигатели
- Производительность:
0,12 кВт – 45 кВт
- Класс защиты: IP66
- Разработан в соответствии с последними мировыми стандартами и правилами
- Класс эффективности IE3
- Всемирные сертификаты
Стандартные двигатели
- Производительность:
0,12 кВт – 55 кВт
- Разработан в соответствии с последними мировыми стандартами и правилами
- Классы эффективности: от стандартного эффективного (IE1) до суперпремиального (IE4)
Однофазные двигатели
Асинхронные двигатели
- Производительность:
0,12 кВт – 1,5 кВт
- Класс эффективности IE1
- Глобальные одобрения и приемки
Двигатели с гладкой поверхностью
Асинхронные двигатели
- Производительность:
0,12 кВт – 2,2 кВт
- Глобальные одобрения и приемка
Трехфазные асинхронные двигатели NORD – прочные и универсальные
NORD производит четыре различных линейки электродвигателей переменного тока для работы в самых разных областях применения. В то время как двигатели с гладким корпусом идеально подходят для производства продуктов питания и напитков, двухскоростные двигатели и однофазные двигатели обеспечивают необходимую мощность для станков, насосов, конвейерных лент или вентиляторов.
В то время как двигатели с гладким корпусом идеально подходят для производства продуктов питания и напитков, двухскоростные двигатели и однофазные двигатели обеспечивают необходимую мощность для станков, насосов, конвейерных лент или вентиляторов.
Наши трехфазные асинхронные двигатели имеют стандартную мощность от 0,16 до 75 л.с. и отличаются непревзойденной производительностью, высоким качеством изготовления и длительным сроком службы. Асинхронные двигатели можно комбинировать с полным ассортиментом редукторов и приводных технологий NORD для комплексного решения.
Преимущества наших трехфазных асинхронных двигателей:
- Долговечность
Наши стандартные двигатели обеспечивают непревзойденную защиту от электрических и механических перегрузок. - Низкие эксплуатационные расходы
Благодаря высокому качеству изготовления и простой конструкции затраты на техническое обслуживание сведены к минимуму.
- Универсальность
Трехфазные асинхронные двигатели NORD подходят для бесчисленного множества применений в различных отраслях промышленности.
Наши однофазные двигатели: простая конструкция, надежная работа
Наши однофазные двигатели доступны в трех версиях: Для простых применений мы рекомендуем экономичный однофазный двигатель со схемой Штейнмеца; для более требовательных приложений наилучшим решением являются конструкции с рабочим конденсатором или рабочим и пусковым конденсатором.
Доступны однофазные двигатели мощностью от 0,16 до 2 л.с. Они могут работать на частотах 50 Гц или 60 Гц при напряжении 115 В или 230 В и поддерживают широкий диапазон напряжений (от 220 В до 240 В).
Двухскоростные двигатели: один привод, гибкие скорости
Ассортимент двигателей NORD включает двухскоростные двигатели для различных областей применения, требующих гибкости. Эти приводы позволяют работать с двумя или более фиксированными скоростями.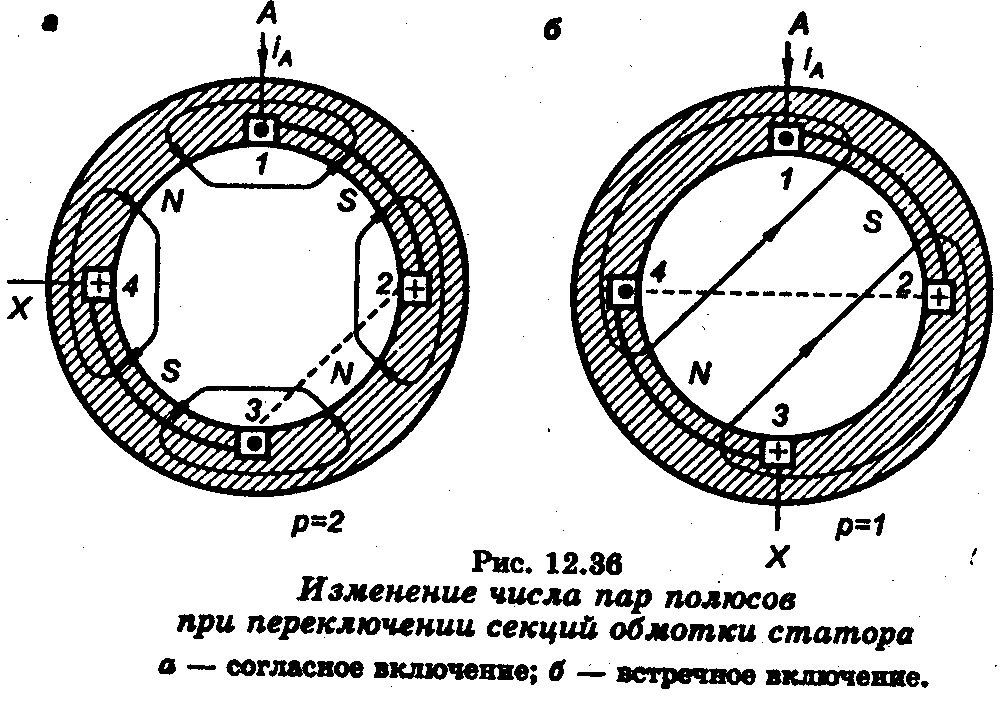 Мы поставляем этот тип двигателя в 4/2-полюсном, 8/4-полюсном, 8/2-полюсном и 6/4-полюсном исполнении и, при необходимости, с обмоткой Даландера.
Мы поставляем этот тип двигателя в 4/2-полюсном, 8/4-полюсном, 8/2-полюсном и 6/4-полюсном исполнении и, при необходимости, с обмоткой Даландера.
Двигатели с гладким корпусом для применений, где санитария и чистота имеют важное значение
Трехфазные асинхронные двигатели NORD также доступны в версии с гладкой поверхностью, моющейся. Наши двигатели с гладким корпусом очень легко чистить, и они идеально подходят для использования в пищевой и фармацевтической промышленности. Они идеально подходят для комбинации с алюминиевыми прямолинейными, коническими и червячными редукторами NORD для комплексного решения по промывке.
Благодаря алюминиевому корпусу двигатели с гладким корпусом очень устойчивы к коррозии. Для работы в более суровых условиях они могут быть опционально снабжены герметизированной поверхностью NORD NSD tupH. Посмотрите, как двигатели с гладким корпусом NORD оптимизируют процессы солодовни в Чешской Республике.
К заявке
Изменение полюсов асинхронного двигателя
Изменение полюсов асинхронного двигателя – Для данной частоты синхронная скорость обратно пропорциональна количеству полюсов. Синхронную скорость, а следовательно, и скорость двигателя можно изменить, изменив количество полюсов. Возможность изменения числа полюсов должна быть предусмотрена на этапе производства, и такие машины называются «двигатели с переключением полюсов » или «многоскоростные двигатели » 9.0222 ‘.
Синхронную скорость, а следовательно, и скорость двигателя можно изменить, изменив количество полюсов. Возможность изменения числа полюсов должна быть предусмотрена на этапе производства, и такие машины называются «двигатели с переключением полюсов » или «многоскоростные двигатели » 9.0222 ‘.
Короткозамкнутый ротор не имеет определенного количества полюсов. Он имеет такое же количество полюсов, как и обмотка статора. Следовательно, в короткозамкнутом двигателе устройство требуется только для изменения числа полюсов в статоре. В двигателе с фазным ротором также требуется устройство для изменения числа полюсов в роторе, что усложняет машину. Поэтому этот метод регулирования скорости асинхронного двигателя с переключением полюсов используется только с двигателями с короткозамкнутым ротором.
Простым, но дорогостоящим способом изменения количества полюсов статора является использование двух отдельных обмоток статора, которые наматываются для двух разных чисел полюсов. Экономичной и распространенной альтернативой является использование одной обмотки статора, разделенной на несколько групп катушек.
Экономичной и распространенной альтернативой является использование одной обмотки статора, разделенной на несколько групп катушек.
Количество полюсов изменяется путем изменения соединений этих групп катушек. Теоретически, разделив обмотку на несколько групп катушек и выведя выводы всех этих групп, можно получить количество номеров полюсов путем повторного соединения этих групп. На практике для простоты обмотка делится только на две группы катушек. Это позволяет изменить число полюсов в 2 раза. Расположение обмотки для этого конкретного случая поясняется следующим образом:
На рис. 6.24(а) показана фазная обмотка, состоящая из 6 витков, разделенных на две группы: а-б, состоящие из витков с нечетными номерами (1, 3, 5), соединенных последовательно, и с-d из витков с четными номерами (2, 4, 6). соединены последовательно. Катушки можно заставить проводить ток в заданных направлениях, соединяя группы катушек последовательно или параллельно, как показано на рис. 6.24(б) и (в) соответственно. При таком соединении машина имеет 6 полюсов. Если ток через катушки группы а-б поменять местами (рис. 6.25(а)), то все катушки будут давать северные полюса. Ф
При таком соединении машина имеет 6 полюсов. Если ток через катушки группы а-б поменять местами (рис. 6.25(а)), то все катушки будут давать северные полюса. Ф
люкса, выходящие из этих северных полюсов, теперь будут находить пути для выхода через межполюсные пространства, в результате чего в межполюсных пространствах образуются южные полюса. Таким образом, машина теперь будет иметь 12 полюсов. Здесь снова нужное направление тока через катушки может быть получено путем соединения двух секций a-b и c-d либо последовательно, либо параллельно, как показано на рис. 6.25 (b) и (c). Таким образом, каждая фаза машинной обмотки имеет две группы катушек, a-b и c-d, которые могут быть соединены как последовательно, так и параллельно для обоих номеров полюсов 6 и 12.
Кроме того, три фазы машины могут быть соединены треугольником или звездой. Путем выбора подходящей комбинации последовательного или параллельного соединения между группами катушек каждой фазы и соединения звездой или треугольником между фазами можно получить изменение скорости при работе с постоянным крутящим моментом, работой с постоянной мощностью или работой с переменным крутящим моментом.