
Что можно сделать из шагового двигателя
Регистрация Вход. Ответы Mail. Вопросы – лидеры Не взлетает квадрокоптер 1 ставка. Перестал работать Mi band 4 1 ставка. Роботы уничтожат ваши рабочие места?
Поиск данных по Вашему запросу:
Схемы, справочники, даташиты:
Прайс-листы, цены:
Обсуждения, статьи, мануалы:
Дождитесь окончания поиска во всех базах.
По завершению появится ссылка для доступа к найденным материалам.
Содержание:
- Драйвер для шагового двигателя из принтера
- Маломощный ветрогенератор из шагового двигателя: самодельное устройство из принтера
- 6.2. Шаговый двигатель
- Самодельный ветрогенератор на основе шагового двигателя
- Часто задаваемые вопросы по шаговым двигателям (FAQ)
Шаговый двигатель от старого принтера как генератор - Шаговые двигатели и особенности их применения
- Как сделать генератор для велосипеда из шагового двигателя
- Как запустить шаговый двигатель без электроники
- Как сделать генератор для велосипеда из шагового двигателя
ПОСМОТРИТЕ ВИДЕО ПО ТЕМЕ: Самоделки из шагового all-audio. proа для телефона,фонарик и высоковольтный преобразователь.
proа для телефона,фонарик и высоковольтный преобразователь.
Драйвер для шагового двигателя из принтера
Создание ветрогенератора не обязательно означает изготовление крупного и мощного комплекса, способного обеспечивать электроэнергией целый дом или группу потребителей. Можно изготовить небольшой ветряк , представляющий собой, по сути, действующую модель серьезной установки.
Целью такого мероприятия может быть:. Создание такого ветряка не потребует использования большого количества материалов или инструментов, можно обойтись подручными средствами. Рассчитывать на выработку серьезных объемов энергии не приходится, но для питания небольшого светильника на светодиодах может хватить.
Его сложно создать самостоятельно, поскольку размеры устройства невелики. Проще всего использовать небольшой электродвигатель , позволяющий использовать его в режиме генератора.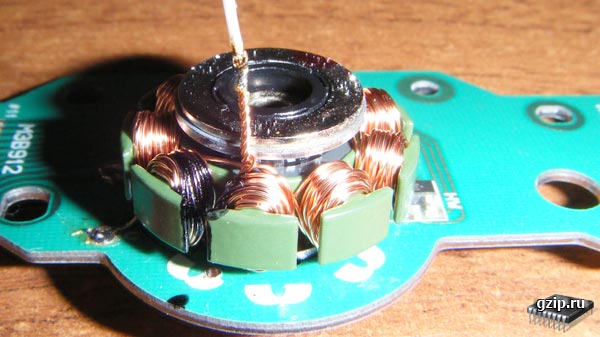 Чаще всего, при изготовлении маломощных ветрогенераторов используют шаговые электродвигатели.
Чаще всего, при изготовлении маломощных ветрогенераторов используют шаговые электродвигатели.
Особенность их конструкции состоит в наличии нескольких обмоток. Обычно, в зависимости от размера и назначения, изготавливают двигатели с 2, 4 или 8 обмотками фазами. При подаче напряжения на них по очереди вал соответственно поворачивается на определенный угол шаг. Преимущество шаговых двигателей заключается в способности производить достаточно большой ток при низких скоростях вращения. Выработка электроэнергии будет производиться с такой же эффективностью, как и на устройствах другой конструкции с использование повышающих передач.
Считается, что с помощью генератора из шагового двигателя можно заряжать аккумуляторы или батареи мобильных телефонов, но на практике положительные результаты отмечаются крайне редко. В основном, получаются источники питания для небольших светильников.
К недостаткам шаговых двигателей можно отнести значительное усилие, необходимое для начала вращения. Это обстоятельство снижает чувствительность всей ветроустановки к слабым ветрам , что можно несколько скорректировать путем увеличения площади и размаха лопастей. Отыскать такие двигатели можно в старых дисководах для гибких носителей, в сканерах или принтерах. Как вариант, можно приобрести новый двигатель, если в запасе нужного устройства не окажется.
Это обстоятельство снижает чувствительность всей ветроустановки к слабым ветрам , что можно несколько скорректировать путем увеличения площади и размаха лопастей. Отыскать такие двигатели можно в старых дисководах для гибких носителей, в сканерах или принтерах. Как вариант, можно приобрести новый двигатель, если в запасе нужного устройства не окажется.
Для большего эффекта следует выбирать более крупные двигатели, они способны выдавать достаточно большое напряжение, чтобы его можно было как-то использовать. Его можно извлечь из вышедшего из строя старого устройства, в каждом принтере как минимум два таких двигателя. Как вариант, можно приобрести новый, не бывший в эксплуатации.
Он способен вырабатывать мощность около 3 ватт даже при слабом ветре, типичном для большинства регионов России. Напряжение, которое может быть достигнуто, составляет 12 и более В, что позволяет рассматривать устройство как возможность зарядки аккумуляторов.
Шаговый двигатель выдает переменное напряжение. Для пользователя необходимо прежде всего выпрямить его. Потребуется создать диодный выпрямитель, для чего потребуется по 2 диода на каждую катушку. Можно и напрямую подключить светодиод к выводам катушки, при достаточной скорости вращения этого хватит.
Для пользователя необходимо прежде всего выпрямить его. Потребуется создать диодный выпрямитель, для чего потребуется по 2 диода на каждую катушку. Можно и напрямую подключить светодиод к выводам катушки, при достаточной скорости вращения этого хватит.
Крыльчатку ротора проще всего установить прямо на вал двигателя. Для этого надо изготовить центральную часть, способную плотно усаживаться на вал. Доя усиления фиксации крыльчатки необходимо просверлить отверстие и нарезать в нем резьбу.
Впоследствии в него буде завинчиваться стопорный винт. Для изготовления лопастей обычно используют полипропиленовые канализационные трубы или иные подходящие материалы.
Главным условием является малый вес и достаточная прочность, поскольку лопасти иногда набирают вполне приличную скорость. Использование ненадежных материалов может создать нежелательную ситуацию, когда крыльчатка разваливается на ходу. Обычно изготавливают по 2 лопасти, но можно сделать и большее количество. Необходимо помнить, что большая площадь лопастей повышает КИЭВ ветряка , но параллельно с этим увеличивается фронтальная нагрузка на крыльчатку, передающаяся валу двигателя.
Изготовление маленьких лопастей также не рекомендуется, поскольку они не смогут преодолеть залипание вала при старте вращения. Для возможности вращения ветряка вокруг вертикальной оси надо сделать специальный узел. Сложность в этом заключается в необходимости обеспечить неподвижность кабеля, идущего от генератора.
В противном случае придется монтировать систему наподобие щеточного коллектора, что нерационально и требует большого количества времени. Собранный ветряк необходимо установить на мачту высотой как минимум 3 метра. Потоки ветра у поверхности земли имеют нестабильное направление, вызванное турбулентностью.
Подъем на некоторую высоту поможет получить более равномерные потоки. Для самостоятельной установки на ветер по оси вращения устанавливают хвостовой стабилизатор, играющий роль флюгера. Он делается из любого куска пластмассы, алюминиевой пластинки или иного подручного материала. Оглавление Создание ветрогенератора Самодельный ветряк на основе шагового двигателя Ветрогенератор из деталей от принтера Лопасти Мачта Рекомендуемые товары.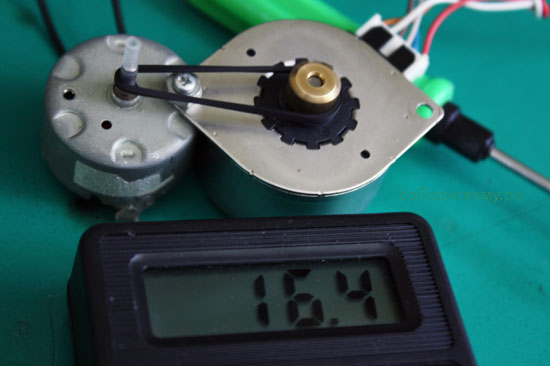
Маломощный ветрогенератор из шагового двигателя: самодельное устройство из принтера
В качестве генератора на ветряк подойдет шаговый двигатель ШД для принтера. Даже при небольшой скорости вращения он вырабатывает мощность около 3 Вт. Напряжение может подниматься выше 12 В, что дает возможность заряжать небольшой аккумулятор. Характерная для российского климата турбулентность ветра в приземных слоях приводит к постоянным изменениям его направления и интенсивности. Ветрогенераторы больших размеров, мощность которых превышает 1 Квт будут инерционными.
Научившись управлять шаговым двигателем, можно создавать устройства, которые будут делать очень точные перемещения. Например, 3D-принтер.
6.2. Шаговый двигатель
Чтобы просмотреть это видео, включите JavaScript и используйте веб-браузер, который поддерживает видео в формате HTML5. На протяжении тысячелетий люди усовершенствовали орудия труда, изучали силы природы и подчиняли их себе, использовали их энергию для работы машин, а в прошлом веке создали машины, которые могут управлять другими машинами. Теперь создание устройств, которые взаимодействуют с физическим миром, доступно даже школьнику. Наш курс состоит из серии практических задач про создание вещей, которые работают сами: изучают мир, принимают решения и действуют — двигаются, обмениваются данными друг с другом и с человеком, управляют другими устройствами. Мы покажем, как собирать эти устройства и программировать их, используя в качестве основы платформу Arduino. Пройдя этот курс, вы сможете создавать устройства, которые считывают данные о внешнем мире с разнообразных датчиков, обрабатывают информацию, получают и отправляют данные на ПК, в Интернет, на мобильные устройства, управляют индикацией и движением. Создание устройств будет включать проектирование, изучение компонентов, сборку схем, написание программ, диагностику. Попутно с созданием самих устройств вы сделаете визуализацию на ПК, создадите веб-страницу, которую будет демонстрировать одно из ваших устройств, а также разберетесь с устройством и работой FDM 3D-принтера.
Теперь создание устройств, которые взаимодействуют с физическим миром, доступно даже школьнику. Наш курс состоит из серии практических задач про создание вещей, которые работают сами: изучают мир, принимают решения и действуют — двигаются, обмениваются данными друг с другом и с человеком, управляют другими устройствами. Мы покажем, как собирать эти устройства и программировать их, используя в качестве основы платформу Arduino. Пройдя этот курс, вы сможете создавать устройства, которые считывают данные о внешнем мире с разнообразных датчиков, обрабатывают информацию, получают и отправляют данные на ПК, в Интернет, на мобильные устройства, управляют индикацией и движением. Создание устройств будет включать проектирование, изучение компонентов, сборку схем, написание программ, диагностику. Попутно с созданием самих устройств вы сделаете визуализацию на ПК, создадите веб-страницу, которую будет демонстрировать одно из ваших устройств, а также разберетесь с устройством и работой FDM 3D-принтера.
Самодельный ветрогенератор на основе шагового двигателя
Создание ветрогенератора не обязательно означает изготовление крупного и мощного комплекса, способного обеспечивать электроэнергией целый дом или группу потребителей. Можно изготовить небольшой ветряк , представляющий собой, по сути, действующую модель серьезной установки. Целью такого мероприятия может быть:. Создание такого ветряка не потребует использования большого количества материалов или инструментов, можно обойтись подручными средствами. Рассчитывать на выработку серьезных объемов энергии не приходится, но для питания небольшого светильника на светодиодах может хватить.
В этом посте я постараюсь вкратце рассказать про шаговые электродвигатели, и как с ними можно работать с помощью нашего любимого ардуино.
Часто задаваемые вопросы по шаговым двигателям (FAQ)
Шаговый двигатель — это бесколлекторный синхронный электродвигатель с несколькими обмотками. В ходе его работы электрический ток подается на обмотку статора, что влечет за собой фиксацию ротора.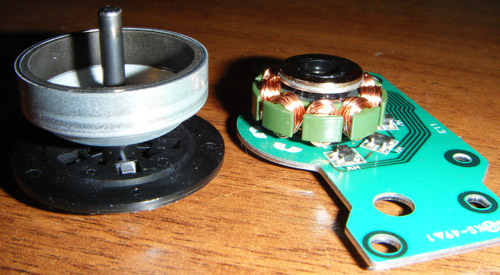 Активация обмоток двигателя происходит последовательно, благодаря чему вызываются угловые дискретные перемещения ротора, также называемые шагами. Поэтому шаговые двигатели и получили такое название. Этот двигатель имеет достаточно сложную конструкцию, а также непростую систему управления по сравнению с обычным коллекторным двигателем. Чтобы управлять данным оборудованием, необходимо переключать уровень напряжения в обмотках и одновременно контролировать ток, причем делать это в определенной последовательности.
Активация обмоток двигателя происходит последовательно, благодаря чему вызываются угловые дискретные перемещения ротора, также называемые шагами. Поэтому шаговые двигатели и получили такое название. Этот двигатель имеет достаточно сложную конструкцию, а также непростую систему управления по сравнению с обычным коллекторным двигателем. Чтобы управлять данным оборудованием, необходимо переключать уровень напряжения в обмотках и одновременно контролировать ток, причем делать это в определенной последовательности.
Шаговый двигатель от старого принтера как генератор
Введите электронную почту и получайте письма с новыми самоделками. Не более одного письма в день. Войти Чужой компьютер. В гостях у Самоделкина! Генератор для велосипеда из шагового двигателя.
Можно ли собрать ветрогенератор из шагового двигателя? Его сложно создать самостоятельно, поскольку размеры устройства невелики. Проще.
Шаговые двигатели и особенности их применения
Лента новостей:. Ссылки на мои проекты:. Проезжая на велосипеде мимо дачных участков, я увидел работающий ветрогенератор: Большие лопасти медленно, но верно вращались, флюгер ориентировал устройство по направлению ветра.
Проезжая на велосипеде мимо дачных участков, я увидел работающий ветрогенератор: Большие лопасти медленно, но верно вращались, флюгер ориентировал устройство по направлению ветра.
Как сделать генератор для велосипеда из шагового двигателя
Статьи и видео. Другие измерительные приборы, платы и электронные компоненты. Что такое шаговый двигатель и как им управлять. При этом вращение ротора осуществляется пошагово с фиксацией в конечной позиции. Каждый шаг представляет собой угол, величина которого зависит от устройства соответствующего двигателя.
Последовательная активация обмоток двигателя вызывает дискретные угловые перемещения шаги ротора. Первые шаговые двигатели появились в х годах XIX века и представляли собой электромагнит, приводящий в движение храповое колесо.
Как запустить шаговый двигатель без электроники
Порой встает вопрос о том, как бы управлять шаговым двигателем. Как правило, это нужно осуществить, при проектировании какой-нибудь самоделки или более серьезного проекта, например станка с числовым программным управлением. Естественно, такое управление можно купить. Но, драйвер для шагового двигателя из принтера также можно сделать. Это будет самый простой вариант, который наглядно продемонстрирует возможность управлять этим устройством. Понадобится старый принтер или сканер, можно неработающий. Оттуда, собственно, и будет извлечен шаговый двигатель, если такового нет в наличии.
Естественно, такое управление можно купить. Но, драйвер для шагового двигателя из принтера также можно сделать. Это будет самый простой вариант, который наглядно продемонстрирует возможность управлять этим устройством. Понадобится старый принтер или сканер, можно неработающий. Оттуда, собственно, и будет извлечен шаговый двигатель, если такового нет в наличии.
Как сделать генератор для велосипеда из шагового двигателя
У меня много различной оргтехники, которая вышла из строя. Выбрасывать я её не решаюсь, а вдруг пригодится. Из её частей возможно сделать что-нибудь полезное. К примеру: шаговый двигатель, который так распространен, обычно используется самодельщиками как мини генератор для фонарика или ещё чего.
На что ещё способны шаговые моторы? — Забивать голы в настольном хоккее / Хабр
Создавая своего первого робота (Робот для настольного хоккея), а именно механическую часть, узнал много интересного для себя, чем и хочу поделиться.
Примерно половину знаний я «нагуглил» или подсмотрел на Youtube, а вторую половину получил на практике, методом проб и ошибок в многочисленных экспериментах.
Расскажу про 4 момента, на мой взгляд заслуживающих особого внимания:
- Разгон шагового мотора до максимальных оборотов.
- Одновременная работа массива из шаговых моторов через один контроллер.
- Охлаждение шаговых моторов и драйверов.
- Как избавиться от писка шаговых моторов.
В настольном хоккее Stiga Play-Off с каждой стороны по 6 игроков (вратарь и 5 на поле). У моего робота для настольного хоккея, в соответствии с количеством игроков — 6 роборук, по одной руке для каждого игрока, и каждую руку приводят в движение 2 мотора. Первый мотор перемещает игрока вперёд и назад, а второй мотор вращает клюшку. Итого задействовано 12 шаговых моторов.
Почему именно шаговые моторы? Мне понадобилась точность и аккуратность, а шаговый мотор как раз и обладает способностью вращать вал строго на заданное количество градусов/шагов. Но, кроме точности, понадобилась скорость, и тут начались проблемы и поиск решения.
Но, кроме точности, понадобилась скорость, и тут начались проблемы и поиск решения.
1. Разгон шагового мотора до максимальных оборотов
При поиске в интернет можно найти много информации про ЗD принтеры, ЧПУ, роборуки с 6 степенями свободы и тому подобным устройствам. Но, мне нужно передвинуть игрока на ~40 см за доли секунды или ударить клюшкой по шайбе так, чтобы она полетела в ворота через всё игровое поле. И что делать? — ставить опыты и выжимать из моторов все соки!
Вал шагового мотора вращается импульсами и моторы, которые я использовал для робота (типоразмер Nema 17) делают 1 полный оборот за 200 шагов, по 1.8 градуса за 1 шаг.
Как новичок, я приобрёл самые обычные драйверы для шаговых двигателей A4988, купил контроллер Ардуино Мега с самым большим количеством входов/выходов, CNC Shield v3 для удобного размещения сразу 4-х драйверов, блок питания на 12 вольт, всё соединил проводами по инструкциям с многочисленных сайтов.
Моторы стали вращаться, но мне была нужна скорость. Если подать с контроллера на драйвер мотора 1000 импульсов в секунду, мотор будет вращаться со скоростью 5 оборотов в секунду. Замечательно, но этого было мало. Увеличил количество импульсов и мотор перестал трогаться – пищит и не крутится, не хватает сил тронуться сразу на таких оборотах. Это как на машине с механикой сразу включить 5-ю передачу. Пришлось дорабатывать скетч контроллера для плавного, но по возможности, быстрого старта. Есть, конечно, готовые классы AccelStepper, но как-то я с недоверием его воспринял, будут ограничения как всегда, подумал и сделал свой собственный класс для плавного старта, в котором использовал формулу кубической параболы с некоторыми вспомогательными коэффициентами.
Сначала интервалы между импульсами нужно делать больше, чтобы мотор тронулся, и дальше плавно сокращать интервалы между импульсами. Мотор будет плавно разгоняться благодаря такому программному вариатору. Для разных моторов могут быть свои условия максимально быстрого разгона, нужно экспериментировать, понять где потолок возможностей мотора по напряжению и току.
Для разных моторов могут быть свои условия максимально быстрого разгона, нужно экспериментировать, понять где потолок возможностей мотора по напряжению и току.
При таком разгоне обязательно присутствуют пропуски шагов, но потеря нескольких шагов для тех целей, которые я преследовал, не важны, это не 3D печать.
Подвожу итог – для максимального RPM нужно обеспечить плавный разгон.
2. Одновременная работа массива из шаговых моторов через один контроллер
Как уже озвучено выше, в роботе используется 12 шаговых моторов. Этот массив моторов управляется через 1 контроллер Ардуино Мега, который был выбран из-за наличия большого количества пинов (входов/выходов).
Чтобы управлять 12 моторами мне понадобилось:
- 12 пинов контроллера для передачи шагов на драйверы моторов
- 12 пинов для установки направления вращения
- 12 пинов для управления включением/отключение драйверов моторов (необязательно, но желательно, т.
 к. оказалось важным для охлаждения)
к. оказалось важным для охлаждения)
Дополнительно задействовал ещё 24 пина:
- 12 пинов для получения данных от оптических концевых выключателей (нужны для безопасности механики, ограничивая зону перемещения приводов игроков, разве можно полностью доверять программе? Датчики по одному установлены в начале и конце каждого привода и ещё есть пружины для мягкой остановки, разве можно полностью доверять датчикам?)
- 12 пинов для RGB-светодиодов индикации режимов работы (зелёный горит при подаче питания, синий добавляется при движении вперёд/назад и красный добавляется при вращении клюшки, в общем, зелёный для пользы, а синий и красный цвета для красоты)
Мозг робота сейчас «пребывает» в настольном компьютере, как временное решение, пока в микрокомпьютер Rasperry Pi 4 на борт робота не переедет. Компьютер передаёт управляющие команды через USB порт в контроллер Ардуино и тут нужна возможность одновременной работы всех 12 моторов.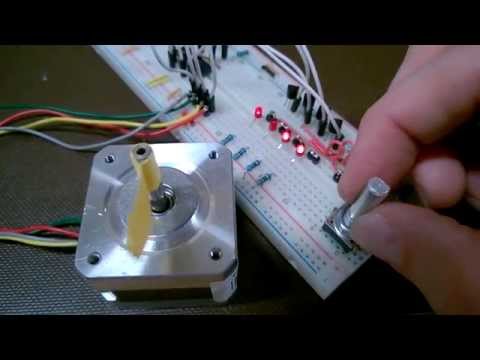 На практике, в процессе игры я не видел, чтобы все 12 моторов работали одновременно, может 4, но технически это предусмотрено.
На практике, в процессе игры я не видел, чтобы все 12 моторов работали одновременно, может 4, но технически это предусмотрено.
В скетче для Ардуино создал класс Player для управления 2-мя моторами (перемещение и вращение клюшки) и при запуске создаётся 6 экземпляров этого класса. При инициализации классов передаются номера пинов, к которым будет привязан каждый из «игроков», т.о. каждый из 6-ти игроков привязан к своим драйверам/моторам, датчикам и светодиодам.
В цикле loop скетча проверяется порт USB на наличие команды от компьютера и по очереди вызываются методы Move и Rotate у 6-ти объектов игроков для выполнения движений или остановок.
Подведу итог — контроллер Ардуино Мега оснащён очень большим количеством входов/выходов >70. Если потребуется решить некую задачу, можно подключить десятки шаговых моторов.
3. Охлаждение шаговых моторов и драйверов
Если на драйвер шагового мотора на пин VMOT подать питание и драйвер будет включен (по умолчанию ENABLE=0 — включен), мотор, возможно, начнёт немного пищать (зависит от драйвера), а обмотки мотора и драйвер начнут греться. Можно потрогать радиатор драйвера и убедится в этом. Я начал использовать питание мотора 12V и нагрев быстро почувствовал, а при 36V мне очень не понравился этот эффект.
Можно потрогать радиатор драйвера и убедится в этом. Я начал использовать питание мотора 12V и нагрев быстро почувствовал, а при 36V мне очень не понравился этот эффект.
Дожидаться, пока сгорят обмотки мотора или драйвер я не стал и начал разбираться, что не так. Всё решить помог пин ENABLE. В случае, если вращение мотора не требуется, следует выключить драйвер ENABLE=1, а когда понадобится вращение, нужно просто включить драйвер ENABLE=0. Поскольку в роботе используются 12 моторов, и они не очень часто вращаются одновременно, значит им можно давать остыть, когда не нужны.
Я взял под контроль пин Enable каждого драйвера мотора через Ардуино. Понадобилось дополнительно задействовать 12 пинов контроллера, но драйверы стали холодными и моторы больше не шумят, хотя используется напряжение 36V.
4. Как избавиться от писка шаговых моторов
Сначала я приобрёл драйверы для шаговых моторов A4988, понадобилось 12 штук. Они популярные, надёжные, простые и понятные, а также очень дешёвые, для новичков самое то.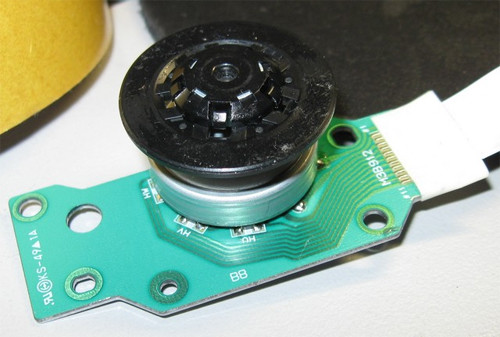 Всё работало почти хорошо, с шагами всё понятно, 1 импульс – 1 шаг, 200 импульсов при 1.8 градуса на 1 шаг – 1 оборот мотора.
Всё работало почти хорошо, с шагами всё понятно, 1 импульс – 1 шаг, 200 импульсов при 1.8 градуса на 1 шаг – 1 оборот мотора.
Но, было 2 неприятных момента. На малых оборотах, особенно, когда нужно медленно повернуть клюшку игрока, у моторов наступал тремор. И ещё, этот писк! При работе 12 моторов было ощущение, что со мной разговаривает R2D2.
Стал искать решение проблемы и узнал о тихих драйверах с немецкими чипами Trinamic TMC 2100, 2130, 2208 и прочих сериях. Стоят они в несколько раз дороже, но, если Вам нужна тишина и плавность хода, они того стоят.
В TMC есть режим StelthChop с интерполяцией 4 или 16 входных импульсов в 256 микрошагов. После тестирования, выбрал режим 4->256 микрошагов.
Скетч для Ардуино потребовалось немного дописать, т.к. теперь для полного оборота мотора требовалось не 200 шагов, а в 4 раза больше (800 на 1 полный оборот) из-за используемого режима StelthChop 4->256. Больше шагов – плавнее и тише ход. Вращение сейчас плавное, тихое и никакого писка.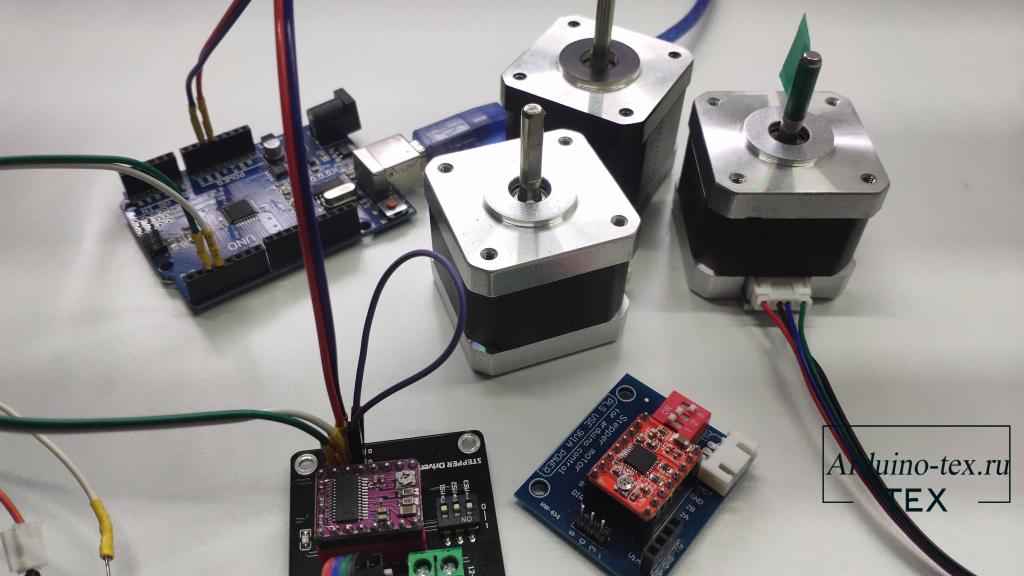
Видео, что в итоге получилось:
Надеюсь, мой опыт поможет кому-нибудь в других проектах.
RS Компоненты | Промышленные, электронные продукты и решения
Компоненты РС | Промышленные, электронные продукты и решения- Поддержка
- Откройте для себя
- для вдохновения
- Найдите местное отделение
Разделы нашей продукции:
- Аккумуляторы и зарядные устройства
- Соединители
- Дисплеи и оптоэлектроника
- Контроль электростатического разряда, чистые помещения и прототипирование печатных плат
- Пассивные компоненты
- Блоки питания и трансформаторы
- Raspberry Pi, Arduino и средства разработки
- Полупроводники
- Механизм автоматизации и управления
- Кабели и провода
- Корпуса и серверные стойки
- Предохранители и автоматические выключатели
- HVAC, вентиляторы и управление температурным режимом
- Освещение
- Реле и формирование сигналов
- Переключатели
- Доступ, хранение и обработка материалов
- Клеи, герметики и ленты
- Подшипники и уплотнения
- Инженерные материалы и промышленное оборудование
- Застежки и крепления
- Ручной инструмент
- Механическая передача энергии
- Сантехника и трубопровод
- Пневматика и гидравлика
- Электроинструменты, Пайка и сварка
- Компьютеры и периферия
- Уборка и техническое обслуживание помещений
- Офисные принадлежности
- Средства индивидуальной защиты и рабочая одежда
- Безопасность и скобяные изделия
- Безопасность сайта
- Испытания и измерения
— все, что вам нужно знать о шаговых двигателях на самом деле, они очень надежны, как и серводвигатели.
 Двигатель работает за счет точной синхронизации с импульсным сигналом, поступающим от контроллера к приводу, обеспечивая высокоточное позиционирование и управление скоростью. Шаговые двигатели обладают высоким крутящим моментом и низкой вибрацией на низких скоростях, что идеально подходит для приложений, требующих быстрого позиционирования на небольшом расстоянии.
Двигатель работает за счет точной синхронизации с импульсным сигналом, поступающим от контроллера к приводу, обеспечивая высокоточное позиционирование и управление скоростью. Шаговые двигатели обладают высоким крутящим моментом и низкой вибрацией на низких скоростях, что идеально подходит для приложений, требующих быстрого позиционирования на небольшом расстоянии. Все, что вам нужно знать о шаговых двигателях
«Шаговые двигатели? Серводвигатели должны иметь лучшую производительность». Это типичный ответ на вопрос о шаговых двигателях. Очевидно, существует серьезное заблуждение о шаговых двигателях. Фактически, шаговые двигатели использовались в различных приложениях, таких как передовое оборудование и доступные автоматизированные инструменты. В этой статье объясняются причины постоянного выбора шаговых двигателей. Некоторые читатели могут сказать, что никогда раньше не видели шагового двигателя. Шаговые двигатели используются во многих приложениях и отраслях промышленности в качестве приводных систем, требующих высокоточного управления, таких как автоматизация производства (FA), производственное оборудование для полупроводников, ПФД и солнечных панелей, медицинские устройства, аналитические приборы, прецизионные столики, финансовые системы, машины для упаковки пищевых продуктов и регулировка апертурной диафрагмы для камер.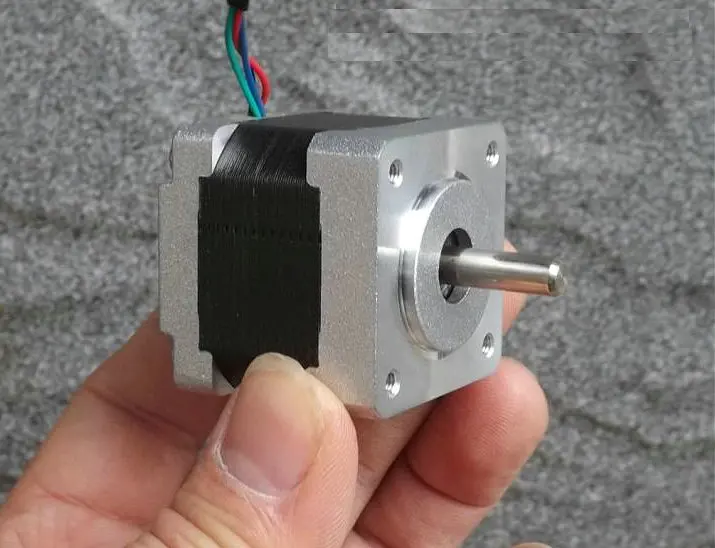
Почему вы используете шаговый двигатель?
Простота в использовании: 34%
Недорого: 17%
Простые операции: 16%
Нет необходимости в настройке: 12%
Другое: 21%
Ключевые моменты: простота использования, простые операции и низкая стоимость
Согласно опросу пользователей шаговых двигателей, многие отдают предпочтение шаговым двигателям из-за их «простоты использования», «простых операций» и «низкой стоимости». “вытекает из структуры и конфигурации системы. Вполне логично, что многие пользователи находят в шаговых двигателях такие положительные стороны благодаря простой структуре и конфигурации системы. Однако некоторые читатели могут скептически относиться к реальным характеристикам двигателя с точки зрения его точности и крутящего момента. Нелегко полностью понять всю идею, если нет примеров сравнения с другими управляющими двигателями, такими как серводвигатели. Зная характеристики и применяя различные подходы в зависимости от требуемых операций, шаговые двигатели, безусловно, могут снизить стоимость оборудования. Характеристики и техническая информация шаговых двигателей поясняются ниже:
Характеристики и техническая информация шаговых двигателей поясняются ниже:
Впечатляющая «Точность остановки». Быстро перемещается в «диапазоне низких/средних скоростей»
Шаговые двигатели обладают замечательной точностью остановки, и возможно точное управление с разомкнутым контуром. Например, при использовании серии RK II для позиционирования поворотного стола точность его остановки составляет ±0,05° (без нагрузки). Поскольку ошибки положения остановки не накапливаются между шагами, возможно позиционирование с высокой точностью. Конструкция шагового двигателя, не требующая энкодера, обеспечивает простую систему привода и низкую стоимость.
Точка 1
Фантастическая точность остановки
Например, при преобразовании точности остановки ±0,05° шагового двигателя в шарико-винтовой механизм:
Условия эксплуатации:
• Двигатель: серия RK II
• Ход шарико-винтовой передачи : 10 мм
Точность остановки: ±1,4 мкм
Обычно точность шлифованных шариковинтовых пар составляет ±10 мкм. При использовании катаного шарико-винтовой передачи его точность снижается до ±20 мкм, что указывает на то, что точность остановки шагового двигателя намного выше, чем у шарико-винтовых передач.
При использовании катаного шарико-винтовой передачи его точность снижается до ±20 мкм, что указывает на то, что точность остановки шагового двигателя намного выше, чем у шарико-винтовых передач.
Высокий крутящий момент в диапазоне низких/средних скоростей — еще одна замечательная особенность шаговых двигателей. Одной из основных особенностей серводвигателей является создание постоянного крутящего момента в диапазоне средних и высоких скоростей. Серводвигатели подходят для операций с длинным ходом (много оборотов). С другой стороны, характеристики крутящего момента шаговых двигателей не являются плоскими. Кривая крутящего момента в диапазоне низких/средних скоростей становится очень высокой, а в диапазоне высоких скоростей становится очень низкой. Помимо стабильного вращения в диапазоне низких скоростей, с которым борются серводвигатели, шаговые двигатели могут обеспечивать высокий крутящий момент в требуемом диапазоне скоростей для операций с коротким ходом (меньшее количество оборотов), поэтому они подходят для выбора желаемого угла шага для многократного вращения. таблицы и толчковые приложения. Это происходит из-за короткого времени позиционирования при работе с коротким ходом, поэтому двигатель замедляется и останавливается до достижения максимальной скорости. Иными словами, скоростные характеристики обычно не требуются.
таблицы и толчковые приложения. Это происходит из-за короткого времени позиционирования при работе с коротким ходом, поэтому двигатель замедляется и останавливается до достижения максимальной скорости. Иными словами, скоростные характеристики обычно не требуются.
Высокая скорость отклика и отличная синхронизация
Третьей замечательной особенностью шаговых двигателей является быстродействие. Управление без обратной связи, которое отправляет односторонние команды двигателю, имеет высокий механизм отслеживания команд. В то время как серводвигатели, которые ожидают обратной связи от энкодера, как правило, имеют «задержки» с командами, шаговые двигатели работают синхронно с импульсом. Таким образом, очень мало «задержек», что приводит к отличному отклику. По этой причине шаговые двигатели подходят для приложений, требующих синхронной работы нескольких двигателей. Одним из примеров является приложение для перемещения досок, в котором требуется два конвейера с одним двигателем, установленным соответственно, для перемещения досок между двумя конвейерами.
Точка 2
Отличный диапазон низких/средних скоростей!
Пример: Крутящий момент двигателя с размером корпуса 85 мм эквивалентен номинальному крутящему моменту серводвигателя мощностью 400 Вт при 1000 об/мин.
Крутящий момент в еще более низком диапазоне скоростей может быть до 5 раз выше. Для позиционирования на коротких дистанциях важно иметь высокий крутящий момент в диапазоне низких/средних скоростей.
Точка 3
Высокая Оперативность!
Подходящие области применения
Помимо толчкового режима с частыми пусками и остановами, шаговые двигатели подходят для позиционирования процессоров проверки изображений, которые не любят вибраций, кулачковых приводов, которые трудно регулировать с помощью серводвигателей, и механизмов с низкой жесткостью, таких как как ременная передача. Кроме того, стоимость значительно снижается за счет замены шарико-винтовой передачи на ременную.
Преимущество великолепных характеристик
Помимо снижения затрат, шаговые двигатели имеют много преимуществ с точки зрения производительности. На следующей диаграмме показано преобразование крутящего момента примера серии RKII в крутящий момент типичных диапазонов мощности сервоприводов. Ниже приводится подробная информация о шаговых двигателях, такая как базовая структура, система и примеры приложений, для получения дополнительной информации о шаговых двигателях.
На следующей диаграмме показано преобразование крутящего момента примера серии RKII в крутящий момент типичных диапазонов мощности сервоприводов. Ниже приводится подробная информация о шаговых двигателях, такая как базовая структура, система и примеры приложений, для получения дополнительной информации о шаговых двигателях.
Основы шаговых двигателей
Принцип работы и структура
Шаговый двигатель вращается с фиксированным шагом, как секундная стрелка часов. Высокоточное позиционирование может быть выполнено с управлением без обратной связи благодаря механической конструкции внутри двигателя.
Точное позиционирование (количество шагов)
При полном управлении вращением и скоростью простая конструкция шаговых двигателей достигается без использования электрических компонентов, таких как энкодер внутри двигателя. По этой причине шаговые двигатели очень прочны и имеют высокую надежность с очень небольшим количеством отказов. Что касается точности остановки, ±0,05° (без учета кумулятивных погрешностей тангажа) является очень точным. Поскольку позиционирование шаговых двигателей осуществляется с помощью управления без обратной связи и управляется намагниченным статором и магнитным ротором с маленькими зубьями, шаговые двигатели имеют более высокий механизм отслеживания команд, чем у серводвигателей. Кроме того, при остановке шаговых двигателей не происходит рывков. Они также отлично подходят для ременных передач, которые имеют низкую жесткость.
Поскольку позиционирование шаговых двигателей осуществляется с помощью управления без обратной связи и управляется намагниченным статором и магнитным ротором с маленькими зубьями, шаговые двигатели имеют более высокий механизм отслеживания команд, чем у серводвигателей. Кроме того, при остановке шаговых двигателей не происходит рывков. Они также отлично подходят для ременных передач, которые имеют низкую жесткость.
Полезно для управления скоростью и положением
Когда импульсы вводятся в драйвер через генератор импульсов, шаговые двигатели позиционируются в соответствии с количеством входных импульсов. Базовый угол шага 5-фазных шаговых двигателей составляет 0,72° и 1,8° для 2-фазных шаговых двигателей. Скорость вращения шагового двигателя определяется скоростью частоты импульсов (Гц), заданной драйверу, и можно свободно изменять скорость вращения двигателя, просто изменяя количество входных импульсов или частот драйвера. Шаговые двигатели служат не только в качестве двигателей управления положением, но и в качестве двигателей управления скоростью с высокой синхронизацией.
Шаговые двигатели Применение:
• Высокочастотное повторяющееся позиционирование с фиксированным углом шага
• Позиционирование, требующее длительного времени остановки из-за регулировки ширины и т. д.
• Колеблющиеся нагрузки и изменяющаяся жесткость
• Позиционирование, которое делится на 1 цикл
• Двигатель валы, требующие синхронной работы
Операционная система
Простое управление без датчика или обратной связи
Поскольку можно выполнять точное позиционирование и управление положением при синхронизации с количеством командных импульсов и скоростью, нет необходимости в устройствах , такие как датчик, для позиционирования. Таким образом, вся система проста в построении. Если расширенное управление, такое как операция интерполяции, не требуется, рекомендуется использовать встроенный драйвер функционального типа контроллера. Стоимость снижается за счет отказа от контроллеров, таких как генератор импульсов и модули позиционирования ПЛК.
Встроенный датчик с замкнутым контуром
Хотя позиционирование с высокой точностью возможно при управлении без обратной связи, что произойдет, если возникнет проблема? Чтобы избежать таких ловушек, можно использовать двигатель типа энкодера или встроенный датчик с замкнутым контуром управления (серия AR).
Можно ли дополнительно снизить стоимость?
Общая проблема среди инженеров-конструкторов — снижение затрат. Неужели нет возможности еще больше снизить стоимость? Чтобы выяснить, было ли проведено испытание на снижение затрат с улучшением технических характеристик на основе шарико-винтового механизма. Ниже поясняются детали теста:
Миссия
Механизм линейного перемещения
1. Дальнейшее увеличение скорости
2. Дальнейшее снижение стоимости
[Состояние первоначально запланированного оборудования] Механизм: ШВП + серводвигатель шага, показанные справа, определяются на основе серводвигателя, прикрепленного с помощью шарико-винтовой пары и стальной пластины.
План
Замена механизма на ременный шкив
• Шарико-винтовая передача при попытке увеличить скорость => Ременный механизм может быть более подходящим => 1000 мм/сек до 1500 мм/сек возможна с ременным механизмом. Замените на ремень, если нет проблем с точностью позиционирования. • Значительно снизить стоимость, если возможна замена на ремень => Ремень стоит недорого, но его низкая жесткость может повлиять на стабильность работы серводвигателя даже при автоматической настройке.
Проблемы
1. Разница в точности остановки между винтом и лентой… Какая требуется точность остановки?
2. Влияние низкой жесткости… Влияние на время установления, устранение проблем с настройкой
• Лучшая точность остановки с помощью винта. На ремень поменять не проблема? => Требуемая точность остановки приложения составляет ± 0,05 ~ 0,1 мм, что не так точно, как для винта. Поэтому с заменой ремня все в порядке.
• При замене на ремень жесткость механизма снижается, поэтому движения серводвигателя становятся нестабильными. => Среди двигателей позиционирования шаговые двигатели не имеют встроенного энкодера. По этой причине они не требуют регулировки и обладают низкой жесткостью. Их движения стабильны независимо от колеблющихся нагрузок. Если выход одинаковый, рассмотрите шаговые двигатели.
Оценка
Механизм: ременный шкив + двигатель: попробуйте с шаговым двигателем
• Транспортируемая масса -> Макс. допустимая нагрузка 7 кг • Скорость передвижения -> Увеличена до 800 мм/с Двигатель => Замена шагового двигателя на серводвигатель снижает затраты на 50%! Механизм => Заменив шарико-винтовой механизм на ременный, стоимость снижена на 7%!
Результаты
Было много возможностей для снижения затрат!
Проведя проверку механизма с нуля, а также выбрав двигатель на основе характеристик, нам удалось улучшить технические характеристики и снизить стоимость, даже несмотря на то, что размер двигателя стал немного больше. В прошлом выбор двигателя производился на основе его простоты использования или знакомства с ним. После этого упражнения стали ясны различия в работе серводвигателей и шаговых двигателей. Удивительно, что шаговые двигатели оказались более доступными, чем ожидалось. Должны быть возможности для снижения стоимости других устройств, использующих этот метод. Это упражнение еще раз подтвердило, что ключом к успеху является хорошо сбалансированный выбор между характеристиками двигателя и его стоимостью, а также максимизация характеристик двигателя.
В прошлом выбор двигателя производился на основе его простоты использования или знакомства с ним. После этого упражнения стали ясны различия в работе серводвигателей и шаговых двигателей. Удивительно, что шаговые двигатели оказались более доступными, чем ожидалось. Должны быть возможности для снижения стоимости других устройств, использующих этот метод. Это упражнение еще раз подтвердило, что ключом к успеху является хорошо сбалансированный выбор между характеристиками двигателя и его стоимостью, а также максимизация характеристик двигателя.
Что имеет более высокую точность остановки – шаговый двигатель или серводвигатель?
Запрос клиента: Ищет двигатель с хорошей точностью остановки. Насколько велика разница между шаговыми двигателями и серводвигателями?
Допущение: Серводвигатель переменного тока серии NX оснащен 20-битным энкодером, поэтому он должен иметь высокое разрешение и хорошую точность остановки.
Во-первых, необходимо уточнить разницу между разрешением и точностью остановки: Разрешение — это количество шагов на один оборот, его также называют углом шага для шаговых двигателей. Это необходимо при рассмотрении того, насколько точным должно быть требуемое позиционирование. Точность остановки — это разница между фактической позицией остановки и теоретической позицией остановки.
Это необходимо при рассмотрении того, насколько точным должно быть требуемое позиционирование. Точность остановки — это разница между фактической позицией остановки и теоретической позицией остановки.
Означает ли это, что серводвигатель переменного тока, оснащенный высокоточным энкодером, имеет лучшую точность остановки, чем шаговые двигатели?
Не совсем. В прошлом не было проблем с концепцией «точность останова серводвигателей, равная разрешению энкодера в пределах ± 1 импульса». Однако последние серводвигатели оснащены 20-битным энкодером (1 048 576 шагов) с очень высоким разрешением. Из-за этого ошибки из-за точности установки энкодера имеют огромное влияние на точность остановки. Поэтому понятие точности остановки немного начало меняться.
Согласно сравнительным таблицам, точность остановки шаговых двигателей и серводвигателей переменного тока почти одинакова (±0,02º ~ 0,03º). Точность зависит от механической точности двигателя для шаговых двигателей, поэтому, если положение остановки может быть выполнено с шагом 7,2º, позиционирование всегда выполняется одними и теми же маленькими зубьями на роторе в соответствии со структурой двигателя.
