
Асинхронный двигатель | Строение и принцип работы асинхронного электродвигателя
Электрическими двигателями называют механизмы, предназначенные для преобразования электрической энергии в механическое движение. Электромоторы сопровождают человека практически во всех сферах его деятельности. Без них невозможно представить современную жизнь. Несмотря на надежность и долговечность, все же случаются поломки и сбои в работе таких устройств. Знание характеристик, особенностей поможет правильно выбирать, обслуживать и при необходимости ремонтировать асинхронные двигатели.
В асинхронных двигателях переменного тока (АД) частота вращения ротора не синхронизирована с частотой магнитного поля, индуцируемого током обмотки статора. От этого принципа произошло определение этой группы электромашин. В синхронных электрических машинах частоты совпадают.
В настоящее время разработано и применяется множество различных разновидностей АД, которые различаются конструктивно и по характеристикам. Бывают однофазные, двухфазные, трехфазные, многофазные конструкции, которые работают от сети переменного тока. Различается количество полюсов. Применяются модификации с постоянной и переменной частотой тока, последние называются инверторными. По типу ротора различают 2 вида: фазные электродвигатели и с короткозамкнутым ротором. Асинхронные электрические моторы выгодно отличаются от других преобразователей энергии компактностью, долговечностью высоким КПД.
Бывают однофазные, двухфазные, трехфазные, многофазные конструкции, которые работают от сети переменного тока. Различается количество полюсов. Применяются модификации с постоянной и переменной частотой тока, последние называются инверторными. По типу ротора различают 2 вида: фазные электродвигатели и с короткозамкнутым ротором. Асинхронные электрические моторы выгодно отличаются от других преобразователей энергии компактностью, долговечностью высоким КПД.
АД распространены очень широко, и являются самым популярным типом электромашин. Асинхронные электродвигатели используют в компрессорах, системах водоснабжения, отопления, кондиционирования, автомобилестроении. Особенно востребованы такие устройства в областях, где требуется точно выдерживать скорость вращения вала, например при производстве полимеров, стеклотканей, проволоки.
Относительно маломощные однофазные агрегаты работают в вентиляторах, маломощной бытовой технике. Более производительные двухфазные агрегаты популярнее, их применяют в приводах стиральных машин, холодильников, иных приборов.
Значительно шире используются трехфазные асинхронные электромашины, в первую очередь в промышленности. Ими оснащают электроприводы станков, подъемных кранов, лифтов, многого другого. Этому способствуют надежность и экономичность электродвигателей.
Как устроен АД
Асинхронный электродвигатель состоит из двух основных узлов: неподвижного статора и вращающегося вокруг своей оси ротора. Статор представляет собой стандартную конструкцию, где сердечник выполнен как полый цилиндр, изготовленный из стальных пластин, изолированных друг от друга. В расположенных на внутренней окружности открытых пазах уложена первичная обмотка, на которую подается напряжение электрической сети.
Внутри статора расположен ротор, опирающийся на вал через подшипники. Сами подшипники с обеих сторон закрыты фиксирующими их крышками. Весь агрегат помещается в металлический корпус. У асинхронных двигателей средней и высокой мощности для более эффективного охлаждения в корпусе предусмотрены ребра, а также вентилятор на валу. Предусмотрена клеммная коробка, куда выводятся концы обмоток.
Предусмотрена клеммная коробка, куда выводятся концы обмоток.
Ротор может быть двух типов: короткозамкнутым и фазным. Конструктивно они различаются, соответственно асинхронные двигатели принадлежат к одной из двух групп по типу ротора.
Асинхронный двигатель с короткозамкнутым ротором
Конструкция такого ротора предельно проста. Сердечник выполнен из штампованных листов, а роль вторичной обмотки играет набор параллельных друг другу металлических стержней, торцы которых замкнуты между собой стальными кольцами. Механизм напоминает беличье колесо.
Обмотки статора расположены под углом 120°. Если подать на них переменное напряжение со сдвигом 120°, внутри возникает вращающееся магнитное поле. Если поместить эту самую беличью клетку внутрь вращающегося поля, его силовые линии будут пересекать проводники ротора, и наводить в них электродвижущую силу, а соответственно появятся токи. В результате там создается собственное магнитное поле, которое будет взаимодействовать с вращающимся полем, входить с ним в «зацепление». Это означает, что ротор начинает вращаться в ту же сторону, что и магнитное поле статора.
Это означает, что ротор начинает вращаться в ту же сторону, что и магнитное поле статора.
Частота вращения ротора всегда меньше, чем частота поля статора. Если он «догонит» частоту статора, ЭДС наводиться не будет, вращающий момент станет равным нулю, и электродвигатель перестанет работать. В этом эффекте и кроется смысл асинхронности. Относительная величина отставания, выраженная в условных единицах, называется скольжением. Этот параметр зависит от характеристик ротора, в том числе его сопротивления.
Асинхронные двигатели с короткозамкнутым ротором не имеют подвижных контактов, их узлы проще, благодаря чему надежны и долговечны. Применяются в системах, не требующих регулировки скорости вращения, поскольку она затруднена, конструкция усложняется.
Асинхронный двигатель с фазным ротором
Фазный ротор по конструкции незначительно отличается от статора. Сердечник состоит из набора изолированных пластин, изготовленных из электростатической стали и закрепленных на вале. Между пластинами предусмотрены пазы, ориентированные вдоль продольной оси. В них укладываются витки вторичной обмотки, ее называют фазной. Число фаз обмоток статора и ротора должно быть одинаковым. Электрические цепи ротора подключается тремя контактными кольцами, на которых закреплены концы обмотки. Фазы соединяются звездочкой или треугольником. В двухполюсном асинхронном двигателе оси обмоток смещены друг относительно друга на 120°.
Между пластинами предусмотрены пазы, ориентированные вдоль продольной оси. В них укладываются витки вторичной обмотки, ее называют фазной. Число фаз обмоток статора и ротора должно быть одинаковым. Электрические цепи ротора подключается тремя контактными кольцами, на которых закреплены концы обмотки. Фазы соединяются звездочкой или треугольником. В двухполюсном асинхронном двигателе оси обмоток смещены друг относительно друга на 120°.
Предусмотрена возможность подключения дополнительного внешнего сопротивления для улучшения пусковых характеристик. Обычно используется реостат со ступенчатой регулировкой. Двигатель в такой конфигурации набирает обороты тоже ступенчато. При достижении оптимальных оборотов реостат отключается путем закорачивания токосъемных колец.
Особенности разных типов роторов
Электродвигатели с короткозамкнутыми роторами характеризуются следующими достоинствами:
- постоянная скорость, которая не зависит от изменения нагрузки;
- устойчивость к кратковременным механическим перегрузкам;
- простой пуск и подключение.

Отмечают более высокий КПД и легкую автоматизацию. В то же время данный тип электрических моторов имеет и недостатки, основной из которых — сложная регулировка скорости. Поэтому такая конструкция применяется в системах с постоянной скоростью вращения электродвигателя. Помимо этого, недостатками считают большой ток и недостаточное усилие при пуске.
Электромоторы с фазным ротором уступают короткозамкнутым по потерям мощности из-за более сложной конструкции. Их применяют при необходимости регулировки скорости, уменьшении пускового тока и увеличении крутящего момента в момент старта.
Способы подключения
Запуск электромотора должен происходить с минимальным скачком тока в обмотках. Для этого применяется 5 основных способов подключения:
- непосредственный — питание подается прямо на контакты электродвигателя через контактор или пускатель, когда падение напряжения не критично;
- снижение напряжения в течение времени старта;
- схема соединения обмоток статора переключается на треугольник со звезды;
- плавный запуск;
- изменение частоты напряжения сети.

Для однофазных версий используют расщепление полюсов, конденсаторный или резисторный пуск. Трехфазные электродвигатели запускаются или напрямую, переключением на треугольник, или посредством преобразователя напряжения, будь то реостат, трансформатор. Применяют изменение числа пар полюсов.
Как обеспечивается регулировка скорости
Регулировать частоту вращения асинхронного двигателя не так просто. Существуют 3 возможности. Можно изменить:
- частоту питающей сети;
- число пар полюсов;
- величину скольжения.
Чтобы изменить число пар полюсов нужно специальным образом заложить обмотку статора. Дальнейшие действия заключаются в возможности переключаться на одну, две или три пары полюсов. Такое переключение будет ступенчатым. Соответственно, дискретно будет меняться и частота вращения ротора асинхронного двигателя. В многополюсных обмотках статора частота выше.
Второй способ — изменить скольжение. Его величина зависит, в том числе, и от сопротивления. Для этого ротор оснащают обмотками и делают выводы через кольца. Появляется скользящий контакт, надежность уменьшается. Но помощью реостата или ступенчатого переключения можно вводить дополнительное сопротивление в ротор и плавно, либо дискретно, изменять величину скольжения. Посредством этого действия появляется возможность регулировать частоту вращения асинхронных двигателей.
Для этого ротор оснащают обмотками и делают выводы через кольца. Появляется скользящий контакт, надежность уменьшается. Но помощью реостата или ступенчатого переключения можно вводить дополнительное сопротивление в ротор и плавно, либо дискретно, изменять величину скольжения. Посредством этого действия появляется возможность регулировать частоту вращения асинхронных двигателей.
Однако эти способы не очень экономичны или неудобны. С развитием силовой электроники появился третий, самый действенный способ — изменять частоту питающей сети, для чего служат частотные преобразователи. При плавном изменении частоты питающего тока можно получить непрерывный ряд частот магнитного поля статора асинхронного двигателя в определенном диапазоне, а значит так же плавно изменять скорость вращения вала. Силовая электроника дала АД новый толчок в развитии, их доля превышает 80% всех электродвигателей в мире.
Как обеспечивается высокий пусковой момент
Одним из достоинств асинхронного двигателя с фазным ротором является высокий пусковой момент, тогда как короткозамкнутые роторы такого преимущества не обеспечивают.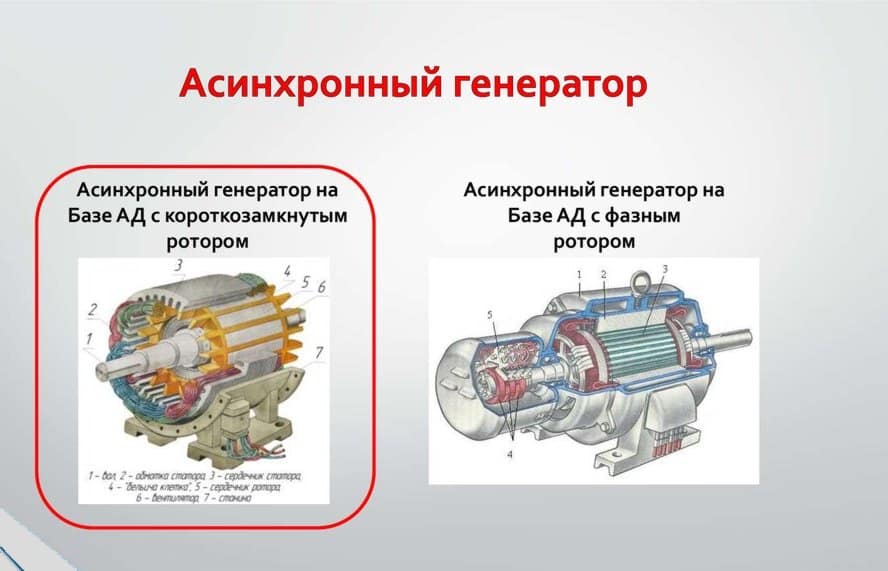 Об этом говорит его механическая характеристика. В момент пуска токи достигают 5 –7 значений номинальной величины, а произведение силы тока на магнитный поток и дает момент вращения.
Об этом говорит его механическая характеристика. В момент пуска токи достигают 5 –7 значений номинальной величины, а произведение силы тока на магнитный поток и дает момент вращения.
Если представить, что ротор конструктивно устроен в виде двух беличьих колес разного диаметра, вставленных друг в друга, то в момент пуска первоначальный момент будет приложен к внешнему колесу большего диаметра. Происходит это из-за явления вытеснения тока на высокой частоте, он называется скин-эффект. При двыхполюсной катушке, частоте сети 50 Гц, магнитное поле ротора развивает угловую скорость 3 тыс. об/мин. Скин-слой при этом составляет 9 мм. В многополюсных машинах этот слой больше. Поэтому, при пуске ток вытесняется наружу, и за счет более длинного рычага возрастает момент. Когда электрическая машина набирает номинальные обороты и переходит в двигательный режим, скин-эффект нивелируется. С ростом частоты вращения ротора падает частота индукции в обмотке. Тогда ток идет уже по внутренней части. По этому принципу и обеспечивается высокая тяга на пуске.
В реальной практике в асинхронных двигателях с повышенным пусковым моментом скин-эффект обеспечивается за счет формирования глубокого паза в фазном роторе. Ток распределяется в разные моменты времени по глубине паза в разных областях. При пуске ток концентрируются во внешней части, потом когда двигатель раскручивается, скин-эффект исчезает. Ток перераспределяется в глубину паза, рабочий вращающий момент становится меньше. Это означает, что в устоявшемся двигательном режиме АД значительно экономичнее, частые старты повышают затраты.
Асинхронный преобразователь энергии как генератор
Генераторы предназначены для преобразования механической энергии вращения в электроэнергию. Если вращать ротор асинхронного двигателя и достигнуть частоты вращения поля статора, ток перестанет наводиться, и вращающий момент не будет создаваться. Если приложить внешнюю силу и продолжить вращать этот ротор по направлению поля с еще более высокой частотой вращения, в роторе начнет вновь начнет наводиться ЭДС, но противоположного направления. Электрический ток будет идти в другую сторону, не как в двигательном режиме. Эти токи будут наводить противоЭДС в обмотке статора. В ней будет создаваться ток. Такая конструкция является асинхронным генератором.
Электрический ток будет идти в другую сторону, не как в двигательном режиме. Эти токи будут наводить противоЭДС в обмотке статора. В ней будет создаваться ток. Такая конструкция является асинхронным генератором.
Если асинхронный двигатель включить в сеть, а потом начать вращать его ротор быстрее, чем частота поля статора в том же направлении, то возникнет генерация в сеть. При этом асинхронный двигатель будет потреблять из сети реактивную энергию для создания магнитного поля, а выдавать активную энергию. Пример — знаменитые электромобили «Tesla» первого поколения. Их оснащали современным инновационным асинхронным преобразователем энергии. Он работал как в режиме двигателя на разгоне, так и в режиме генератора при рекуперативном торможении, когда электроэнергия через инвертор поступает на зарядку батареи.
Асинхронные генераторы принадлежат к группе приборов, вырабатывающих переменный ток разной частоты. В схему включают инвертор, где ток преобразуется в постоянный. Затем снова в переменный, но уже с точно заданной частотой сети — 50 герц.
Преимущества и недостатки асинхронных двигателей
АД, благодаря своим качествам, снискали высокую популярность. К несомненным преимуществам таких устройств относят:
- простую и отработанную конструкцию;
- низкие затраты в эксплуатации: себестоимость единицы мощности в асинхронных двигателях самая низкая;
- надежность, простоту обслуживания, чему способствует отсутствие щеток
- невысокую стоимость.
Благодаря сдвигу фаз не требуются дополнительные устройства и преобразователи для формирования крутящего момента. Не последнюю роль играют малые потери. КПД при работе с максимальной нагрузкой может достигать 97 % благодаря минимальному количеству узлов.
Как и всем устройствам, асинхронным преобразователям присущи недостатки. Среди них:
- затрудненное регулирование скорости вращения вала, узкий диапазон изменения.
- высокие токи при пуске, что может привести к скачкам напряжения в сети.
- инерционность ротора в момент старта: асинхронный двигатель может не запуститься, если приводит массивный агрегат.

- зависимость от параметров сети.
Современные механические и электротехнические конструктивные решения почти полностью нивелируют эти недостатки.
И все же, несмотря на все достоинства, ресурс асинхронных электрических моторов не вечен. Бывают проскальзывания ротора относительно вала, замыкания обмоток, обрывы, повреждения корпуса, износ подшипников, другие неисправности. Все это проявляет себя падением мощности, посторонними звуками и запахами, а то и полным отказом. Приобретать новый агрегат бывает накладно, да и не всегда имеет смысл. В подавляющем большинстве случаев рациональнее устранить неисправность и продолжить эксплуатацию электрического двигателя.
Ремонтом электромоторов любого типа и мощности в Санкт- Петербурге занимается компания «Хельд Вэй». Оперативно и качественно выполняются все работы по восстановлению работоспособности электромоторов независимо от сложности. Каждая отремонтированная электрическая машина проходит испытания, чтобы убедиться в соответствии параметров требованиям к новому агрегату.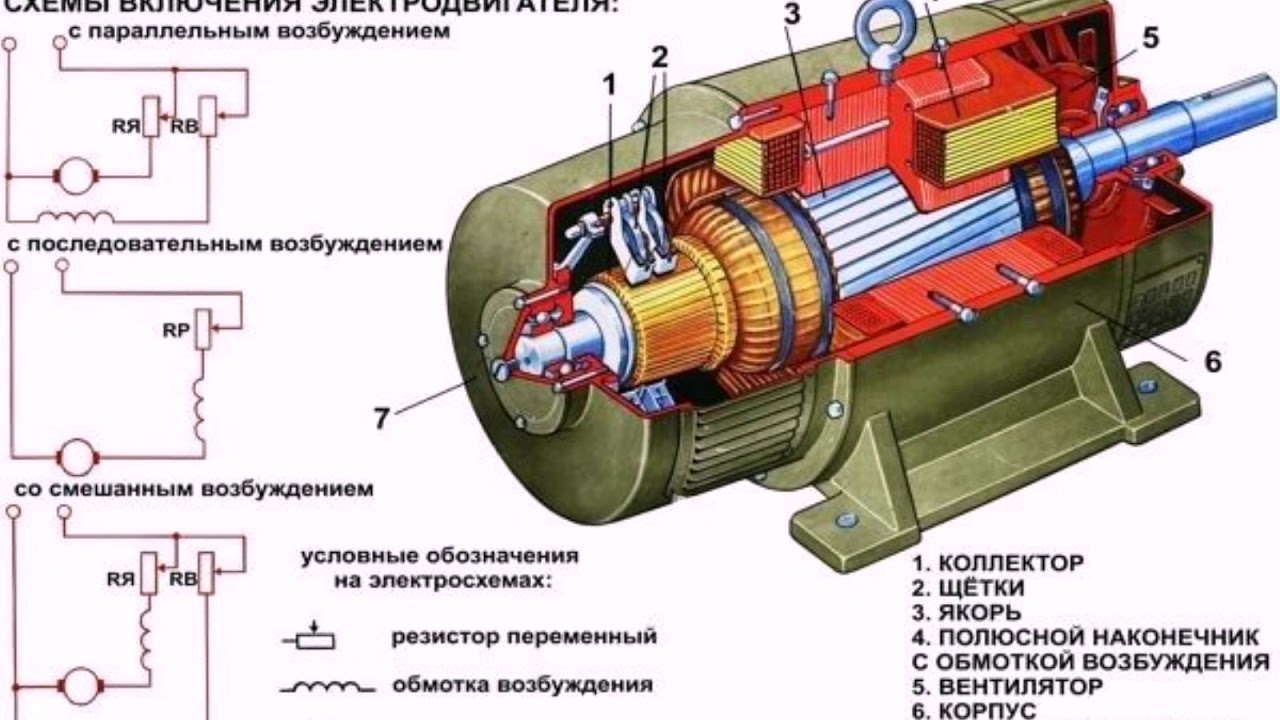
На работу предоставляются скидки, гарантии. Текущий ремонт возможен по месту эксплуатации, с выездом мастеров. Капитальный и ремонт средней степени производятся на территории предприятия. Имеются запчасти и комплектующие.
Звоните, обращайтесь.
какой лучше? — Электродвигатели Электромомент
Краткий экскурс в историю.
«Противостояние» синхронных и асинхронных электродвигателей началось ещё в середине XX века. В то время во главе «команды синхронных», выступал так называемый электродвигатель постоянного тока, он же «коллекторный», он же простейший «член семьи» синхронных электрических машин. Почему «простейший»? Из-за того, что у него, в отличие от современного синхронного электродвигателя, встроена примитивная система управления — коллектор. Эта важная деталь помогла достичь главного: создать простую и дешевую синхронную машину, которую можно питать непосредственно от источника постоянного тока. Однако, недостатков у коллекторных электродвигателей оказалось гораздо больше, чем преимуществ: ограниченный ресурс работы и низкая надёжность, а также конструктивное ограничение количества полюсов не позволяло наращивать крутящий момент.
Именно на волне борьбы с проблемным коллектором в 80-90х годах прошлого века и стали набирать популярность бесколлекторные асинхронные электродвигатели. Несмотря на то, что технологически «асинхронник» оказалось сделать сложнее, а КПД и крутящий момент существенно уступают аналогичным синхронным электродвигателям, «асинхронники» начали быстро вытеснять коллекторные электромоторы. У бесколлекторных синхронных электродвигателей тогда ещё не было шансов, так как для их изготовления и качественного управления ещё не существовало доступной технологической и элементной базы. Из-за этого до сих пор у некоторых специалистов и представителей старшего поколения сохранилось устойчивое предубеждение, что синхронные электродвигатели — это очень дорого и сложно. До тех пор, пока не были созданы доступные цифровые системы и новые алгоритмы управления, одним из основных недостатков синхронных электродвигателей считалось отсутствие возможности управлять их оборотами.
Сегодняшний день.
Синхронные электродвигатели серии EM-I с КПД, достигающим 97 — 98,5%.
За последние 5-10 лет перспективы для синхронных электрических машин кардинально улучшились и расширились! При начавшимся переходе к 6-му Технологическому Укладу становятся всё более доступными и массовыми новые производственные технологии, такие как: металлопласты и теплопроводные композиты, порошковая металлургия и 3D-печать и т.п. Во много раз подешевели и улучшили свои характеристики силовые полупроводники, специализированные микроконтроллеры и прочая электронная элементная база. Разработаны новые оригинальные решения, позволяющие в несколько раз увеличить удельные силовые характеристики электрических машин. Благодаря бурному развитию современных частотных преобразователей с цифровыми системами управления, синхронными электродвигателями стало легко управлять. Точная управляемость всеми силовыми характеристиками синхронных приводов во всём рабочем диапазоне оборотов и высокая экономичность, как при разгоне, так и на холостом ходу, стали дополнительными важными преимуществами относительно «асинхронников». Из-за своих конструктивных особенностей асинхронные электродвигатели неэффективны на холостом ходу и малых оборотах, непрерывно расходуя энергию на возбуждение ротора и требуя сверх-токов для разгона, которые превышают номинальные значения в 4-5 раз! Для сравнения, синхронные электродвигатели развивают номинальный крутящий момент во всём рабочем диапазоне оборотов при номинальном токе. Меньший рабочий ток позволяет, в частности, использовать аккумуляторы с большей удельной ёмкостью.
Из-за своих конструктивных особенностей асинхронные электродвигатели неэффективны на холостом ходу и малых оборотах, непрерывно расходуя энергию на возбуждение ротора и требуя сверх-токов для разгона, которые превышают номинальные значения в 4-5 раз! Для сравнения, синхронные электродвигатели развивают номинальный крутящий момент во всём рабочем диапазоне оборотов при номинальном токе. Меньший рабочий ток позволяет, в частности, использовать аккумуляторы с большей удельной ёмкостью.
Более высокие КПД и крутящий момент при относительно малых рабочих токах и хорошей управляемости позволяют синхронным электродвигателям успешно вытеснять асинхронные во всех типах электротранспорта: наземном, воздушном и водном. Из таких передовых отраслей, как робототехника, мехатроника и авиастроение асинхронные электродвигатели уже вытеснены синхронными практически полностью.
Примером реализации огромного потенциала бесколлекторных синхронных электроприводов является новое поколение современных синхронных машин серий AW, EM и iEM. Данные синхронные электрические машины показывают впечатляющие удельные силовые характеристики, которые в 5-10 раз превосходят традиционные «асинхронники», позволяя переходить от распространённых систем «асинхронный мотор с редуктором» на прямой (безредукторный) электропривод.
Данные синхронные электрические машины показывают впечатляющие удельные силовые характеристики, которые в 5-10 раз превосходят традиционные «асинхронники», позволяя переходить от распространённых систем «асинхронный мотор с редуктором» на прямой (безредукторный) электропривод.
Классический асинхронный электродвигатель
Высоко-моментные синхронные электродвигатели серий EM и iEM
За последние пол-века конструкция и технология производства асинхронных электродвигателей была настолько хорошо отработана и оптимизирована, что какие-либо дальнейшие усовершенствования или улучшения их электрических параметров, даже с использованием современных программно-вычислительных средств, уже не позволяют рассчитывать на ощутимое сокращение столь большого отставания от современных синхронных электродвигателей по удельным силовым характеристикам. Максимум, что сейчас обеспечивают такие усовершенствования «асинхронников» — это улучшение параметров всего на 20-30%. Для соответствия таким важным требованиям 6-го Технологического Уклада, как минимизация материалоёмкости, высокая экономичность и точная управляемость этого улучшения недостаточно, особенно на фоне высоких характеристик, которые демонстрируют современные синхронные электрические машины.
Для соответствия таким важным требованиям 6-го Технологического Уклада, как минимизация материалоёмкости, высокая экономичность и точная управляемость этого улучшения недостаточно, особенно на фоне высоких характеристик, которые демонстрируют современные синхронные электрические машины.
Основное преимущество, которое пока ещё сохраняют асинхронные электродвигатели, благодаря созданным производственным мощностям в странах Азии и высокой конкуренции — это низкая цена. Однако, при достижении сопоставимых с асинхронными двигателями объёмов серийного производства, себестоимость синхронных электрических машин серий AW, EM и iEM неизбежно станет ниже аналогичных по мощности «асинхронников», потому что:
1) синхронные электрические машины серий AW, EM и iEM имеют в несколько раз (!) меньшие масса-габариты по сравнению с «асинхронниками» аналогичной мощности или крутящего момента, что означает пропорционально меньшую материалоёмкость серий AW, EM и iEM.
При этом, вопреки распространённым мифам, стоимость постоянных неодимовых магнитов на практике не превышает 30% от стоимости остальных материалов и комплектующих данных синхронных электрических машин, включая используемые современные композиты.
Указывая на постоянные магниты, как основной недостаток при производстве роторов современных высокомоментных электродвигателей, защитники асинхронных электродвигателей умалчивают про высокую трудоёмкость и сложность серийного производства статоров для асинхронных двигателей. Даже крупные специализированные предприятия, как правило, осуществляют серийную намотку и сборку статоров асинхронных электродвигателей только вручную, что ощутимо сказывается на их себестоимости!
2) В отличие от классических асинхронных и синхронных электрических машин, модели серий AW, EM и iEM обладают высокой технологичностью серийной сборки! Это достигается не только широким применением современных композитных материалов в конструкции статора и ротора, но и возможностью обеспечения полной автоматизации серийного производства с относительно небольшими капитальными вложениями в оборудование.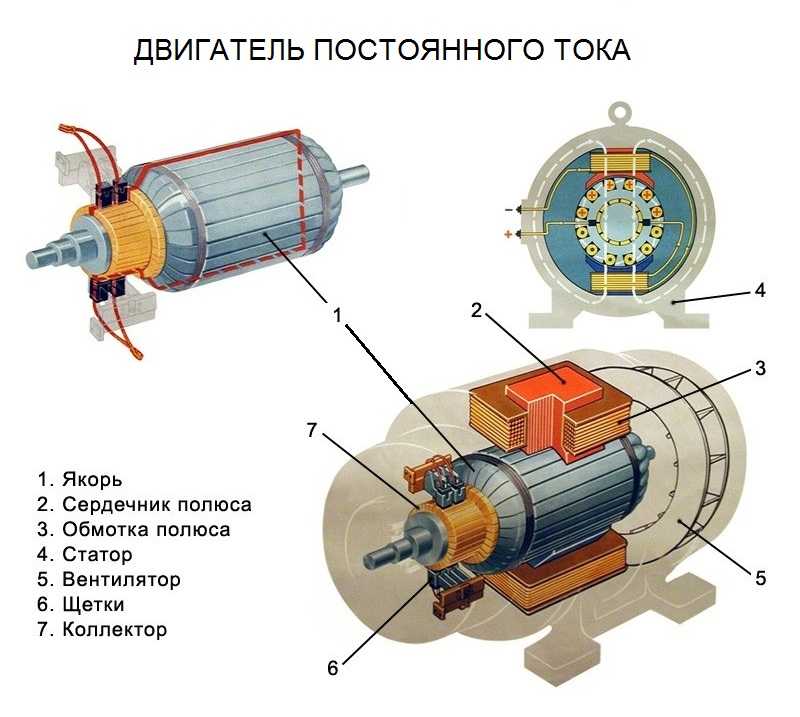 Это позволяет не только снизить себестоимость, но и увеличить надёжность выпускаемой продукции.
Это позволяет не только снизить себестоимость, но и увеличить надёжность выпускаемой продукции.
* Этап ручной сборки статора асинхронного двигателя на профильном производстве.
Композитный статор CCSC-3 для серий AW и EM, собранный с использованием оборудования автоматической намотки бескаркасных катушек
Таким образом, по сравнению с асинхронными, электродвигатели серий EM и iEM имеют относительно более высокую стоимость композитного ротора из-за постоянных магнитов, но, при этом, обеспечивают более низкую себестоимость композитных статоров, благодаря высокой технологичности и автоматизации серийной сборки.
При столь очевидных преимуществах современных синхронных приводов любые попытки сдерживать их развитие страшилками про «размагничивающиеся магниты», «дороговизну», «труднодоступность» и т.п., вряд ли помогут адептам «асинхронников» удержать свои позиции на рынке современных сложных систем, особенно в условиях назревшей необходимости перевода целого ряда ключевых отраслей РФ с преобладающих технологических уровней 3-4-го Технологических Укладов сразу к 6-му Технологическому Укладу, минуя 5-й.
Исторические аналогии.
Если проводить исторические аналогии, то недавно начавшийся переход от асинхронных к синхронным электродвигателям можно сравнить по значимости с появлением застёжки «молния» в первой половине XX века или с переходом от аналоговых к цифровым устройствам в 80-х годах прошлого столетия.
Массовое использование этих прорывных технологий стало возможно только при смене технологических укладов, несмотря на то, что соответствующие изобретения появились ещё за несколько десятилетий до их успешного внедрения.
Застёжка «молния» была запатентована в 1891 году, в начале 3-го Технологического Уклада («Эпоха стали»). После десятилетий гонений и множества неудачных попыток внедрения, серийное производство «молнии» и вытеснение шнуровки из многих отраслей стало возможно именно в разгар 4-го Технологического Уклада («Эпоха нефти»), начиная с 1923 года, когда достигнутый уровень промышленного производства позволил освоить новые производственные технологии.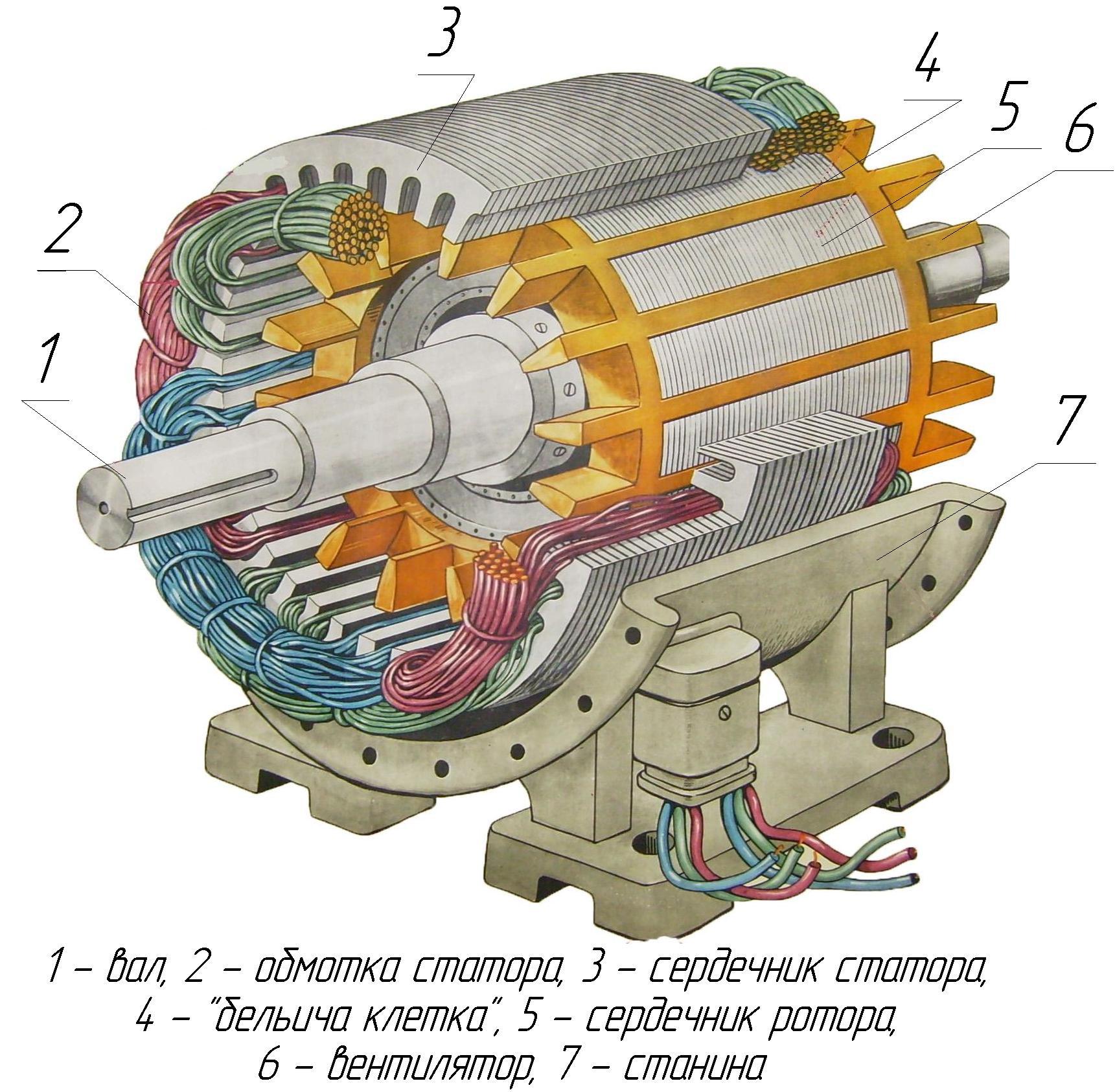
Класс синхронных безредукторных электроприводов «Torque Motors» начал развиваться на Западе совсем недавно, примерно с 2012 года, что как раз совпадает с началом перехода к 6-му Технологическому Укладу. Неизменно только одно: новые изобретения и технологии, как обычно, подвергаются ожесточённому противодействию со стороны тех игроков рынка, кто уже построил свой бизнес с использованием устаревших или уходящих технологий.
Ассоциация «аналог-цифра» возникла у нас в процессе компьютерного моделирования электрических машин EM и iEM, когда мы сравнили математические модели, описывающие синхронные и асинхронные электрические машины. Оказалось, что, в отличие от асинхронного двигателя, для описания синхронной электрической машины существует точная математическая модель. В то время, как для описания «асинхронников» приходится использовать только приблизительные, аппроксимированные модели. Отсюда и ассоциация с «аналогом» и «цифрой», двумя совершенно разными подходами, потребительскими свойствами и перспективами применения.
*В данной статье использовано изображение с ресурса
Каковы причины перегрузки трехфазного асинхронного двигателя?
Во-первых, концепция трехфазного асинхронного двигателя
Трехфазный асинхронный двигатель – это тип двигателя, питаемого от трехфазного источника переменного тока 380 В (разность фаз 120 градусов) одновременно. Поскольку ротор и статор, вращающие магнитное поле трехфазного асинхронного двигателя, вращаются в одном направлении и с разной скоростью, существует разность скоростей, поэтому он называется трехфазным асинхронным двигателем.
Во-вторых, что такое перегрузка трехфазного асинхронного двигателя
Перегрузка трехфазного асинхронного двигателя означает, что ток, протекающий через двигатель, превышает номинальный ток в течение определенного допустимого времени. В качестве простого примера, трехфазный асинхронный двигатель 380 В, 7,5 кВт имеет номинальный ток 15 А, но при фактическом использовании ток может протекать через 20 А, а максимально допустимое время может составлять только 1 минуту. Таким образом, перегрузочная способность двигателя составляет 20/15=133%/1мин. Перегрузочная способность фактического двигателя относительно велика, которая часто может в два раза превышать номинальный ток, а продолжительность составляет 1 мин.
Таким образом, перегрузочная способность двигателя составляет 20/15=133%/1мин. Перегрузочная способность фактического двигателя относительно велика, которая часто может в два раза превышать номинальный ток, а продолжительность составляет 1 мин.
(Метод расчета номинального тока трехфазного двигателя: мощность трехфазного двигателя P=1,732UIcosφ, а cosφ (коэффициент мощности) находится в пределах 0,7-0,95.
Тогда I=P /(1,732*U*cosφ)=4800/(1,732*440*0,8)=7,4 А, упомянутые вами 11,5 А могут быть мощностью всего компрессора или током, который вы измеряли амперметром, если это амперметр. , то двигатель перегружен.Есть также напряжение 440В.Вы можете знать, что ваш двигатель не отечественного производства.Отечественный двигатель, как правило, рассчитан на 380 (400В).Конечно, напряжение 400В может использоваться в моей стране, потому что напряжение двигателя является диапазоном, а номинальное напряжение 400 В двигатель находится на 360 В. Может использоваться между -440 В.
Есть еще упомянутые вами 440В. В нашей стране общее напряжение составляет 380 В, а номинальное напряжение 440 В. Поэтому приведенные выше данные нельзя использовать при расчете тока. Вместо этого 440 следует изменить на 380, чтобы расчетный ток был 9,1А. Вот приблизительный метод расчета. Так как 1,732*380*0,8=520, что близко к 500, при трехфазном напряжении 380В ток I=P (киловатт)/2.
В нашей стране общее напряжение составляет 380 В, а номинальное напряжение 440 В. Поэтому приведенные выше данные нельзя использовать при расчете тока. Вместо этого 440 следует изменить на 380, чтобы расчетный ток был 9,1А. Вот приблизительный метод расчета. Так как 1,732*380*0,8=520, что близко к 500, при трехфазном напряжении 380В ток I=P (киловатт)/2.
Тип контактора следует выбирать, если его напряжение не ниже номинального, и его следует выбирать в соответствии с количеством контактов, необходимых для контура управления. Модель контактора Schneider может выбрать LC-D12, D12 означает, что номинальный ток составляет 12 А)
Перегрузочная способность трехфазного асинхронного двигателя Перегрузочная способность трехфазного асинхронного двигателя представляет собой отношение максимального крутящего момента на единицу значения к номинальному крутящему моменту на единицу значения, которое можно понимать как отношение максимальной нагрузки, которую реально может нагрузить трехфазный асинхронный двигатель, к номинальной нагрузочной нагрузке. Чем лучше перегрузочная способность, тем лучше производительность двигателя.
Чем лучше перегрузочная способность, тем лучше производительность двигателя.
1. Увеличивается тепловыделение двигателя;
2 Шум мотора низкий, вибрация нормальная.
3. Скорость двигателя падает и может даже упасть до нуля;
4. При резком изменении нагрузки скорость двигателя будет колебаться;
Пять, Каковы причины перегрузки трехфазных асинхронных двигателей?1. Механические факторы
В конце концов, двигатель является первичным двигателем. Это имеет смысл только в том случае, если у него есть механическое оборудование. Один только холостой ход мотора пользы не принесет. Однако существует много типов механических проблем, и неисправности более сложны. Следующие примеры являются распространенными ситуациями, такими как: заклинивание механических частей Неисправность, плохое состояние подшипников, крыльчатка и многоступенчатый водяной насос уравновешивают зазор диска и другие проблемы, вызывающие перегрузку двигателя.
2. Ошибка подключения
Двигатели обычно имеют соединение по схеме «звезда» и «треугольник» и должны быть подключены в строгом соответствии с требованиями во время установки, но некоторые люди на месте происшествия выполняют свою работу, основываясь на опыте. Например, если двигатель, соединенный звездой, напрямую подключен к соединению треугольником, и его напряжение напрямую увеличивается с исходных 380 В до 660 В, ток, естественно, увеличится. Однако, если двигатель, соединенный треугольником, неправильно подключен к соединению звездой, ток уменьшится на холостом ходу, но значительно возрастет после полной нагрузки. Оба вышеуказанных условия сожгут двигатель.
3. Низкое напряжение питания
Когда двигатель полностью загружен или запущен, если напряжение питания мало, например, 90% от нормального напряжения, ток увеличится на 110%. Это связано с тем, что мощность двигателя постоянна. Когда рабочее напряжение падает, а мощность на валу постоянна, двигатель может только увеличивать ток, чтобы обеспечить выходную мощность. Есть два фактора, которые обычно вызывают это.
Есть два фактора, которые обычно вызывают это.
Во-первых, само напряжение питания низкое. В это время необходимо отрегулировать переключатель ответвлений трансформатора. Устройство РПН делится на два типа: регулирование напряжения под нагрузкой и регулирование напряжения холостого хода. Короче говоря, регулирование напряжения под нагрузкой означает, что питание не может быть отключено, а рабочее напряжение можно регулировать напрямую. Для регулирования напряжения без нагрузки регулировка напряжения может выполняться только после отключения трансформатора.
Во-вторых, слишком длинный кабель между двигателем и источником питания. Мы знаем, что кабели обычно представляют собой медные жилы с малым сопротивлением. Но малое не означает нет, когда длина кабеля большая, меньшее сопротивление также будет увеличиваться. Кроме того, кабель и двигатель соединены последовательно, и напряжение должно быть разделено последовательно. Когда сопротивление кабеля велико, разделенное напряжение будет больше, поэтому напряжение, подаваемое на двигатель, естественно, будет меньше. Для решения проблемы в это время обычно необходимо увеличить площадь поперечного сечения кабеля. Или переключитесь на ближайший источник питания.
Для решения проблемы в это время обычно необходимо увеличить площадь поперечного сечения кабеля. Или переключитесь на ближайший источник питания.
4. Неправильный выбор двигателя
Для оборудования с большим временем пуска, такого как: шаровые мельницы и т.п. необходимо использовать двигатель с глубоким пазом и двойным короткозамкнутым ротором с малым пусковым током и большой пусковой момент, или двигатель с прямой обмоткой. При обычном использовании двигателя в вышеуказанных случаях легко сжечь двигатель.
Шесть знаний о защите от перегрузки трехфазного асинхронного двигателя: Защита от перегрузки трехфазного асинхронного двигателя: В цепи управления двигателем часто устанавливается тепловое реле, состоящее из биметаллических листов. В нем используются два куска металла с разными коэффициентами расширения, которые изгибаются из-за теплового расширения во время работы с перегрузкой и обеспечивают набор действий. Механизм отключает пару постоянных контактов теплового реле, играя роль защиты от перегрузки. Как правило, при выборе нагревательного элемента его рабочий ток выбирается в соответствии с номинальным током двигателя в 1,1–1,25 раза.
Как правило, при выборе нагревательного элемента его рабочий ток выбирается в соответствии с номинальным током двигателя в 1,1–1,25 раза.
(1) Время срабатывания устройства защиты от перегрузки должно быть немного больше, чем время пуска двигателя. Характеристики устройства защиты двигателя от перегрузки могут обеспечить его нормальную работу только за счет исключения характеристик пускового тока двигателя; но время его действия не может быть слишком большим, а его характеристики могут играть только роль защиты от перегрузки при тепловых характеристиках двигателя.
(2) Мгновенный рабочий ток устройства защиты от перегрузки должен быть немного больше, чем пусковой импульсный ток двигателя. Если имеется защитное устройство с функцией мгновенного действия при перегрузке, его ток срабатывания должен быть больше, чем пиковое значение пускового тока, чтобы двигатель мог нормально запуститься.
(3) Время действия устройства защиты от перегрузки должно быть немного меньше тепловых характеристик провода, чтобы оно могло выполнять функцию резервной защиты линии электроснабжения.
2. Координация устройства защиты от перегрузки и устройства защиты от короткого замыкания
Устройства общей защиты от перегрузки не способны отключать ток короткого замыкания. Если во время работы происходит короткое замыкание, необходимо отключить цепь с помощью устройства защиты от короткого замыкания (например, автоматического выключателя или предохранителя и т. д.), включенного последовательно в главную цепь. Если ток короткого замыкания мал и находится в диапазоне перегрузки, цепь все равно должна быть отключена устройством защиты от перегрузки. Следовательно, должен быть выбор между двумя действиями.
Характеристики устройства защиты от короткого замыкания представлены предохранителями. Ток пересечения с характеристикой защиты от перегрузки равен Ij. Если учитывать дисперсию характеристик предохранителя, токи пересечения равны Is и IB. В настоящее время требуется Is и следующее. Перегрузка по току должна отключаться устройством защиты от перегрузки, а устройство защиты от короткого замыкания должно отключать цепь устройством защиты от короткого замыкания для Ib и выше до допустимого предельного тока короткого замыкания для удовлетворения требований селективности.
В настоящее время требуется Is и следующее. Перегрузка по току должна отключаться устройством защиты от перегрузки, а устройство защиты от короткого замыкания должно отключать цепь устройством защиты от короткого замыкания для Ib и выше до допустимого предельного тока короткого замыкания для удовлетворения требований селективности.
Очевидно, что обеспечить селективность в диапазоне Is-IB сложно. Поэтому диапазон должен быть как можно меньше. Согласно действующему стандарту МЭК предельное значение составляет Is=0,75Ij, Ib=1,25IJ. В настоящее время номинальная включающая и отключающая способность устройства защиты от перегрузок оценивается в 0,75 Дж, что, очевидно, ниже. Тенденция пересмотра стандарта IEC может быть оценена IJ в будущем для повышения его надежности. Следовательно, указанная выше координация должна учитывать как его селективность, так и номинальную включающую и отключающую способность.
Целью нашей защиты трехфазного асинхронного двигателя является «предотвращение неисправности до того, как она произойдет», или предотвращение распространения аварии и ее воздействия на энергосистему и окружающее оборудование в случае аварии. Защита от перегрузки и короткого замыкания необходима для низковольтных трехфазных асинхронных двигателей. Так что это проблема, на которую мы должны обратить внимание при использовании трехфазных асинхронных двигателей.
Защита от перегрузки и короткого замыкания необходима для низковольтных трехфазных асинхронных двигателей. Так что это проблема, на которую мы должны обратить внимание при использовании трехфазных асинхронных двигателей.
Longbank Motor — универсальное решение для двигателей. Свяжитесь с нами для любых ваших запросов OEM или заказов на покупку, и мы свяжем вас с нашими техническими специалистами, чтобы обсудить больше.
Электронная почта: [email protected]
Посетите наш веб-сайт для получения более подробной информации:
Все продукты | Шнайдер Электрик
Доступ к энергии
Автоматизация и управление зданием
 se.com/eg/en/work/products/critical-power-cooling-and-racks/”>
se.com/eg/en/work/products/critical-power-cooling-and-racks/”>Критическая мощность, охлаждение и стойки
Промышленная автоматизация и управление
Низковольтные изделия и системы
Распределение среднего напряжения и автоматизация сети

