
назначение, принцип работы и конструкция
Возникновение аварийных ситуаций при эксплуатации электрических сетей и оборудования в большинстве ситуаций вызываются импульсными скачками напряжения в результате замыкания линий, воздействия атмосферного электричества, ошибок при коммутационных переключениях. Для исключения подобного применяются ОПН.
Аббревиатура ОПН расшифровывается как ограничитель перенапряжения. Данные устройства предназначены для защиты линий и оборудования в ситуациях, когда по той или иной причине нагрузка возрастает в разы, с опасностью возникновения аварии. Рассмотрим особенности конструктивного устройства данных элементов, применяемые разновидности и их технические характеристики, прочие сопутствующие моменты.
ОПНСодержание
- Конструкция
- Принцип действия
- Виды
- Материал
- Технические характеристики
- Применение и требования к эксплуатации
- Техническое обслуживание
Конструкция
ОПН представляет собой полупроводниковый элемент, отличающийся нелинейным значением сопротивления. Он выполнен в виде вилитовых дисков, в качестве материала которого используется оксид цинка с добавлением различных примесей.
Он выполнен в виде вилитовых дисков, в качестве материала которого используется оксид цинка с добавлением различных примесей.
Указанные диски снабжены защитным покрытием, с электрическими выводами на концах. На один из контактов подаётся напряжение, второй выводится на землю.
ОПН состоит из следующих конструктивных элементов:
- электрода,
- полиамидного корпуса,
- термоусадочной трубки,
- варистора,
- силиконовой оболочки.
Принцип действия
В основу принципа действия данного элемента заложена нелинейная характеристика сопротивления. При штатных характеристиках напряжения, его величина близка к нулю, поэтому цепь не замыкается через указанный прибор.
При резком возрастании напряжения, одновременно увеличивается сопротивление. В результате ток проходит через ОПН, замыкаясь на землю. Таким способом обеспечивается выполнение защитной функции.
Виды
В связи с большим разнообразием выполняемых функций, ОНП классифицируют по следующим показателям:
Структура условного обозначение ОПНМожет использоваться комбинация нескольких устройств, с выполнением ступенчатой защиты.
Материал
В зависимости от применённого материала защитной рубашки, защита может производиться посредством следующих видов устройств:
- Фарфоровых – наиболее распространённая разновидность. Керамика устойчива к ультрафиолетовому излучению, поэтому может свободно применяться на открытых установках. Благодаря большой механической прочности, такие элементы могут одновременно выполнять роль опорной конструкции. К недостаткам следует отнести большой вес и хрупкость, что грозит травмами персонала при разлёте осколков в результате разрушения элемента.
- Полимерных – в качестве материала наружного покрытия используется каучук, винил и другие искусственные составы. Данные устройства не поддаются воздействию влаги, обладают меньшим весом и хорошими диэлектрическими свойствами, способны выдерживать значительные механические воздействия, но накапливают на поверхности атмосферную влагу и плохо реагируют на солнечный свет.

- Одноколонковых – в виде полупроводникового элемента с нелинейными характеристиками напряжения, с количеством дисков, в зависимости от категории оборудования.
- Многоколонковых – используются на высоковольтном оборудовании и состоят из нескольких компонентов, объединённых в единый узел. Отличаются повышенной надёжностью и способностью реагировать на различные характеристики нагрузки.
Выбор вида ОПН зависит от параметров оборудования и условий его эксплуатации.
Технические характеристики
Конкретная модель отличается следующими техническими характеристиками:
- временем срабатывания – в зависимости от скорости реакции на перепад напряжения;
- рабочим напряжением – значением данной величины, при которой элемент способен функционировать без разрушения на определённый временной промежуток;
- номинальным повышенным напряжением
- током утечки – от воздействия напряжения на ОПН и зависит от омического сопротивления элемента.
 Значение указанной характеристики – в сотых или тысячных долях ампер, перетекающих по защитному покрытию и полупроводниковому элементу;
Значение указанной характеристики – в сотых или тысячных долях ампер, перетекающих по защитному покрытию и полупроводниковому элементу; - разрядным током – значение при импульсном скачке напряжения;
- устойчивостью к току волны перенапряжения – способностью не подвергаться разрушению при воздействии повышенного напряжения.
ОПН стандартизированы по величине указанных характеристик.
Применение и требования к эксплуатации
Указанные защитные устройства широко применяются для защиты линий электропередач, различных электроустановок промышленного назначения, трансформаторных подстанций, распределительных узлов. В быту ОПН используются для защиты вводных распределительных щитков или оборудования высокой ценности.
ОПН должны эксплуатироваться, согласно требованиям действующих правил и нормативов. Подбор устройств производится, исходя из особенностей эксплуатации и характеристик оборудования.
Техническое обслуживание
Данные ограничители не предусматривают разового применения и способны многократно выполнять свою защитную функцию, сбрасывая напряжение на заземлённую шину.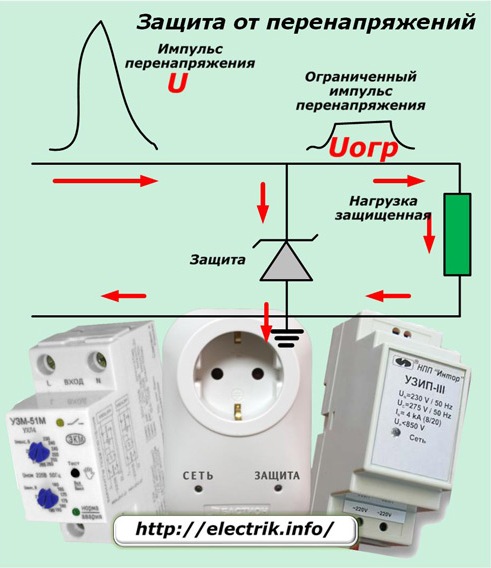
Чтобы избежать внепланового выхода элементов из строя, в ходе эксплуатации они должны подвергаться плановым проверка и техническому обслуживанию, с контролем следующих параметров:
- сопротивления – замеряется мегомметром, не реже 1 раза в каждые 6 лет;
- тока проводимости – необходимость его проверки возникает при снижении отмеченной выше характеристики;
- пробивного напряжения и герметичности – проводится перед пуском в работу новых устройств или в случае проведения заводского восстановительного ремонта;
- тепловизионных измерений – по регламенту изготовителя и составленному на предприятии графику профилактических работ.
Также элементы осматриваются на предмет наличия внешних дефектов в виде подгораний, скопления пыли и загрязнений, разрушения изоляционного покрытия.
Использование ОПН позволяет обеспечить штатную работу электрического оборудования, исключив опасность его повреждения при резких скачках напряжения.
принцип действия, классификация и область применения
Не только производственное, офисное, но и домашнее электрооборудование постоянно находится под угрозой поломок, а то и полного выхода из строя. Причинами тому могут быть как грозовые разряды, так и сбои на линиях передач и в работе трансформаторных станций, провоцирующие резкие скачки напряжения.
- От разрядников к ограничителям
- Схема работы ОПН
- Классификация приборов защиты
- Комплексный вариант безопасности
От разрядников к ограничителям
Электросети — это не только линии высоковольтных передач. В широком смысле в систему входит множество оборудования, установок, приспособлений, к ней подключены промышленные и обычные потребители. Последствия сбоев здесь могут быть весьма серьезны. Пока рынок не стали занимать современные ограничители напряжения, те же задачи решали другие устройства — разрядники.
Особенности их таковы:
- Работа простейшего разрядника состояла в приеме ненормативной электроэнергии и безопасном сбросе ее через систему заземления.
- В обычное состояние разрядник возвращал дугогаситель. Он нейтрализовал повышенную ионизацию.
- Главной особенностью этих устройств являлся искровой промежуток.
 От ширины его зависела мощность системы. Но и увеличивать до бесконечности приборы было тоже нельзя.
От ширины его зависела мощность системы. Но и увеличивать до бесконечности приборы было тоже нельзя. - Слабым местом таких «предохранителей» считалась опасность запаздывания устройства в нормативный режим после всплеска напряжения.
- Разрядники постоянно совершенствовались. Изобретались и внедрялись воздушные, газовые, вентильные модели. Но все они имели недостатки, и в итоге на смену им пришли устройства нового типа — ОПН.
Казалось бы, уберечь технику от пробоев можно, просто отключив ее от сети.
Но если с приближением грозы это еще возможно успеть сделать, то технологический сбой непредсказуем. Да и оставить без электричества, например, доменный цех или операционную вообще недопустимо. Поэтому и необходимы приборы-предохранители.
Схема работы ОПН
ОПН — ограничитель перенапряжения. В числе других устройств его следует отнести к самым современным системам, способным уберегать приборы и проводку в экстремальных ситуациях. Можно сказать, что заложенная в его основе схема успешно решает комплекс проблем, которым ранее противостояли автоматические прерыватели и разрядники, а в бытовых условиях — стабилизаторы и домашние трансформаторы.
В числе других устройств его следует отнести к самым современным системам, способным уберегать приборы и проводку в экстремальных ситуациях. Можно сказать, что заложенная в его основе схема успешно решает комплекс проблем, которым ранее противостояли автоматические прерыватели и разрядники, а в бытовых условиях — стабилизаторы и домашние трансформаторы.
Схема ОПН строится на таких принципах:
- Основой прибора является варистор, который мгновенно впитывает сверхнормативную энергию и отдает ее уже как тепло. Напряжение, которое поступает далее по сети, нормализуется.
- ОПН моментально возвращается в исходное состояние и сразу же способен принять еще один резкий импульс или даже их последовательную серию.
- Первоначально один варистор или несколько их (соединенные вместе) и представляли приспособление. В случае внеплановых проблем из строя выходило все устройство.
- Сейчас приборы представляют собой несколько блоков, подключенных последовательно (или параллельно).
 Это повышает защитные характеристики изделия, а также облегчает его ремонт, для которого бывает достаточно заменить один из модулей.
Это повышает защитные характеристики изделия, а также облегчает его ремонт, для которого бывает достаточно заменить один из модулей. - Варисторы заизолированы в полимерные или фарфоровые корпуса. Первые имеют специальные отверстия, а вторые — мембраны и герметизирующие кольца, а также выхлопные крышки. Это повышает взрыво- и пожаробезопасность приборов при работе с нестабильным напряжением.
Фарфоровые приборы
мало подвержены колебаниям температур, обладают высокой прочностью, но имеют более низкие тепловые показатели и к тому же опаснее при взрыве.Полимерные лучше по разрядным характеристикам и сопротивляемости вибрации, но чутки к сезонным изменениям. Поэтому на очереди сейчас — новые покрытия для аппаратов.
Классификация приборов защиты
Искровой промежуток разрядников ушел в прошлое, как и массивность приборов ОПН намного компактнее. К тому же они способны лучше справиться с резкими переменами сетевой нагрузки, даже если в общей линии с жильем есть и мощное производство, и работающий стройучасток.
Приборы имеют разную классификацию и, соотвественно, область применения:
- Литера А. Эти приборы монтируются при переходах от линий электропередач к сети потребителя. Они призваны обеспечивать защиту как ЛЭП, так и принимающего объекта. Их же можно считать основными «предохранителями» промышленных установок.
- Литера В. Первая линия защиты непосредственно объекта-потребителя (например, дома или административного здания). Такие аппараты устанавливаются на входе линии в помещение.
- Литера С. Место этих устройств — распределительные щиты, в которых обязательно должна быть предусмотрена система заземления.
- Литера D. Квартирные ограничители. Их установка имеет смысл только при наличии хотя бы одной предварительной линии защиты. В то же время изделия этого класса монтируются и непосредственно в оборудовании, а также в переносной технике.
- Те же четыре категории устройств могут быть обозначены и римскими цифрами начиная от I.
 Есть и комбинированные устройства. Большинство из аппаратов дополнительно оснащаются предохранителями.
Есть и комбинированные устройства. Большинство из аппаратов дополнительно оснащаются предохранителями.
Контроль за работоспособностью и состоянием изделия можно проводить визуально. Для этого устройства имеют специальные окошечки, которые в случае выхода ограничителя из строя сигнализируют затемнением или красным светом. Есть и модели, оснащенные системой звуковой сигнализации.
Комплексный вариант безопасности
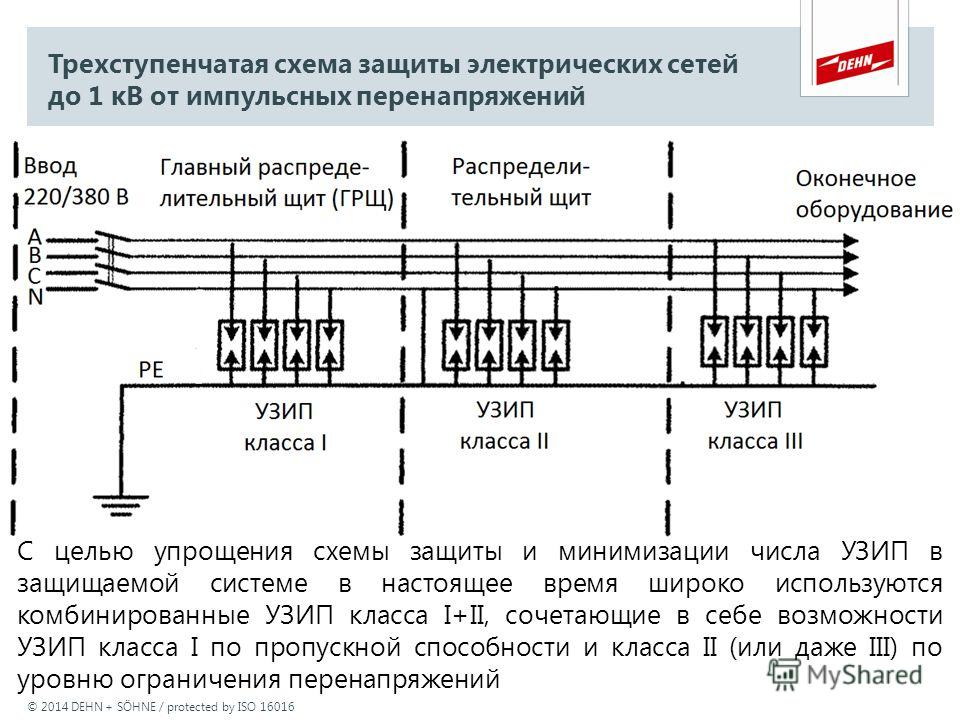
Чтобы доставка, получение и использование электричества были полностью безопасны, лучше всего использовать не единичный ОПН, а комплекс ограничителей импульсных перенапряжений, как их еще называют. Их установку следует доверить профессионалам.
Принцип монтажа и работы единой системы прост:
- Первым, на входе, монтируется самый мощный аппарат.
- В щиток устанавливается прибор меньших токовых характеристик, а дальше — еще меньше.
- В бытовых условиях достаточно варианта В и С или С и D.
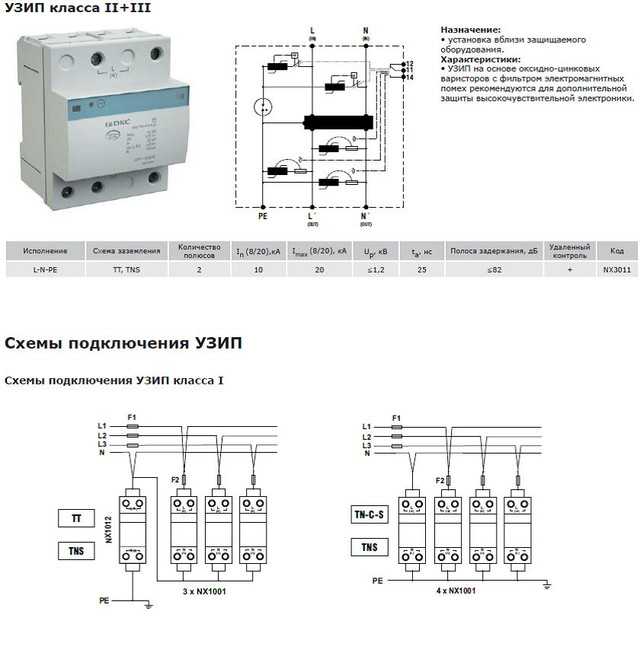
- Приборы в любой общей схеме работают по единому принципу. Они вступают в дело последовательно. Благодаря этому, напряжение снижается постепенно, на каждом этапе.
Слабое место такой системы такое же, как и в любой цепи: если из строя выйдет одно звено, неработоспособной будет вся сеть. Но приборы-потребители, скорее всего, к этому моменту уже будут защищены. После замены пострадавшего блока защитная схема будет восстановлена.
Рассуждая на тему, что такое ОПН, следует признать — вне зависимости от различных рабочих характеристик это, в первую очередь, современный способ защиты электрооборудования. Риски поражений приборов и установок, степень безопасности объектов и людей при использовании надежной аппаратуры снижаются многократно.
Метод декодирования резольверас использованием преобразования Гильберта и ATO
На этой странице
РезюмеВведениеЗаключениеДоступность данныхКонфликты интересовБлагодарностиСсылкиАвторское правоСтатьи по теме
Резольверы широко используются в электромобилях, поездах и других суровых условиях из-за их надежности.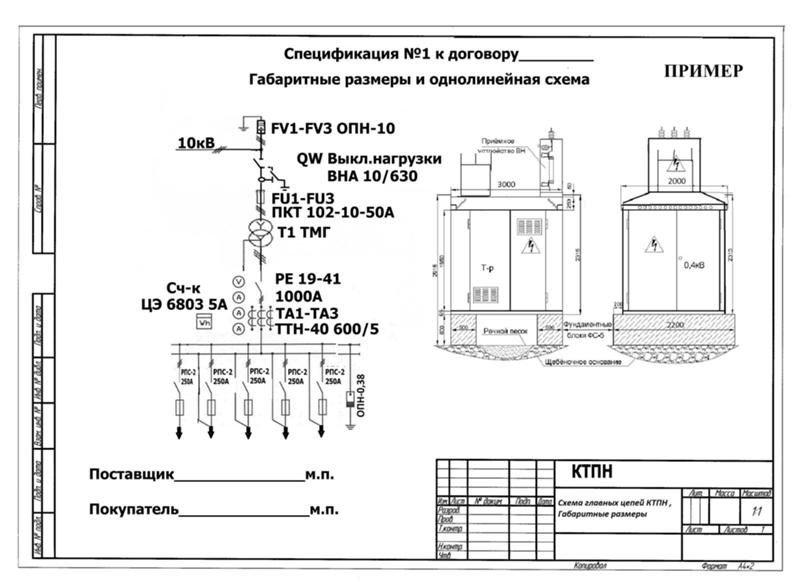 Однако резольвер выдает два ортогональных аналоговых сигнала, что делает декодирование резольвера либо слишком дорогим аппаратным обеспечением, либо низкой точностью декодирования. В этой статье предлагается устойчивый к шуму метод декодирования преобразователя с использованием преобразования Гильберта и наблюдателя с отслеживанием углов (ATO). Во-первых, преобразование Гильберта используется для получения модульных огибающих сигналов резольвера. Затем модульные огибающие фильтруются, и их квадранты распознаются по соотношению полярности сигналов резольвера и крайней точки модульной огибающей. Затем получают идеальные демодулирующие сигналы посредством линеаризации нулевой точки огибающей. Наконец, улучшенный ATO используется для получения угла ротора путем итеративного вычисления демодулирующего сигнала. Эффективность предлагаемого метода проверена экспериментально при различных режимах частоты вращения ротора и сопоставлена с другими методами помехозащищенности. Результаты показывают, что предложенный метод может контролировать ошибку декодирования в пределах 0,5°, когда отношение сигнал-шум составляет 30 дБ, что обеспечивает высокоточную и недорогую схему декодирования для практических приложений.
Однако резольвер выдает два ортогональных аналоговых сигнала, что делает декодирование резольвера либо слишком дорогим аппаратным обеспечением, либо низкой точностью декодирования. В этой статье предлагается устойчивый к шуму метод декодирования преобразователя с использованием преобразования Гильберта и наблюдателя с отслеживанием углов (ATO). Во-первых, преобразование Гильберта используется для получения модульных огибающих сигналов резольвера. Затем модульные огибающие фильтруются, и их квадранты распознаются по соотношению полярности сигналов резольвера и крайней точки модульной огибающей. Затем получают идеальные демодулирующие сигналы посредством линеаризации нулевой точки огибающей. Наконец, улучшенный ATO используется для получения угла ротора путем итеративного вычисления демодулирующего сигнала. Эффективность предлагаемого метода проверена экспериментально при различных режимах частоты вращения ротора и сопоставлена с другими методами помехозащищенности. Результаты показывают, что предложенный метод может контролировать ошибку декодирования в пределах 0,5°, когда отношение сигнал-шум составляет 30 дБ, что обеспечивает высокоточную и недорогую схему декодирования для практических приложений.
1. Введение
Резольвер, тип датчика положения, обладает такими преимуществами, как долговечность и адаптируемость к суровым условиям, и широко используется в железнодорожном транспорте, транспортных средствах на новых источниках энергии, аэрокосмической и других областях промышленности [1]. Однако сигналы резольвера, а не прямой цифровой сигнал, содержащий угол ротора, включают ортогональные косинусные и синусоидальные аналоговые сигналы. Поэтому сигналы резольвера необходимо декодировать, чтобы получить угол ротора.
Существующие методы декодирования резольвера можно разделить на две категории: аппаратные и программные [2]. В аппаратном методе декодирования в основном используется специальный чип декодирования — преобразование резольвера в цифру (RDC). Однако чип RDC дорог и усложняет схему [3].
Программный метод обычно состоит из двух шагов для декодирования сигналов резольвера, и получение сигнала демодуляции является первым шагом. В качестве инструмента частотно-временного анализа S-преобразование используется для извлечения огибающей сигнала резольвера в [3], но вычислительная нагрузка S-преобразования велика, и оно в основном применяется при анализе качества электроэнергии [4–6].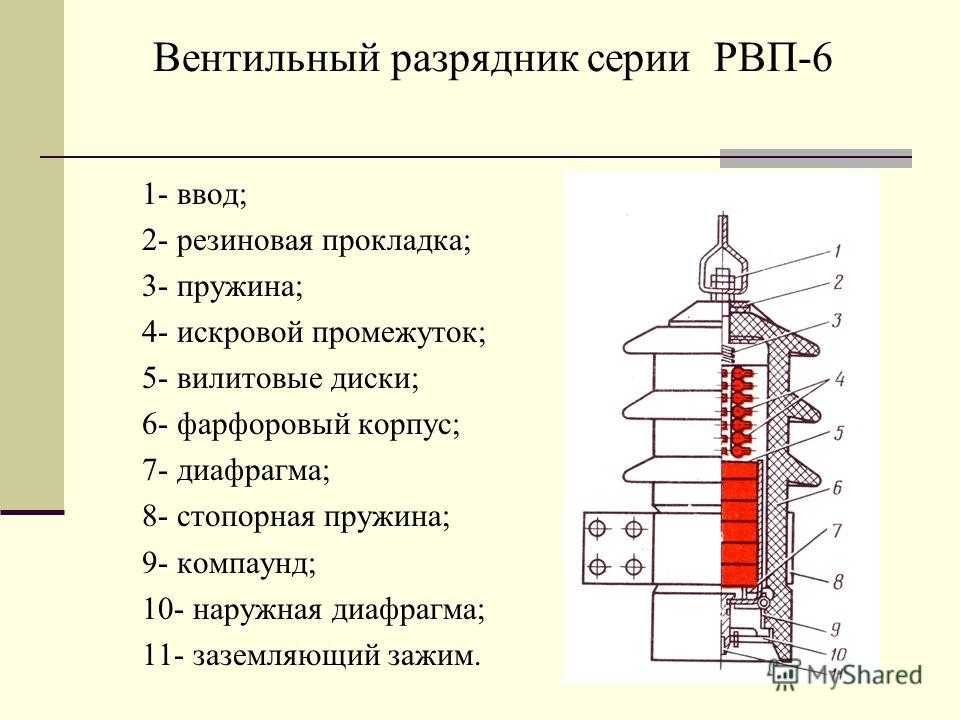 Другие частотно-временные методы, такие как вейвлет-преобразование, в основном используются для системной оптимизации в смежных отраслях [7]. В настоящее время распространенными методами выделения огибающей сигнала резольвера являются пиковое обнаружение или метод умножения возбуждения. Выходные сигналы дискретизируются только в тот момент, когда возбуждение достигает своего пика в методе обнаружения пиков [8], поэтому его относительно просто реализовать, и он имеет хорошую производительность в реальном времени. Однако этот метод вызовет потерю разрешения огибающей и подвержен шуму. Метод умножения возбуждения умножает сигналы резольвера на возбуждение для получения их огибающих, а фильтр необходим для фильтрации компонентов возбуждения для получения сигналов демодуляции [9].], поэтому процесс эксплуатации относительно сложен [10, 11].
Другие частотно-временные методы, такие как вейвлет-преобразование, в основном используются для системной оптимизации в смежных отраслях [7]. В настоящее время распространенными методами выделения огибающей сигнала резольвера являются пиковое обнаружение или метод умножения возбуждения. Выходные сигналы дискретизируются только в тот момент, когда возбуждение достигает своего пика в методе обнаружения пиков [8], поэтому его относительно просто реализовать, и он имеет хорошую производительность в реальном времени. Однако этот метод вызовет потерю разрешения огибающей и подвержен шуму. Метод умножения возбуждения умножает сигналы резольвера на возбуждение для получения их огибающих, а фильтр необходим для фильтрации компонентов возбуждения для получения сигналов демодуляции [9].], поэтому процесс эксплуатации относительно сложен [10, 11].
Вторым этапом программного метода является расчет угла поворота ротора в соответствии с сигналом демодуляции. Обычно используемые методы расчета угла включают метод арктангенса и АТО [12]. В первом методе операция арктангенса применяется непосредственно к демодулированному сигналу, поэтому шум сильно влияет на результаты декодирования. ATO использует метод управления с обратной связью для расчета угла, но при вычислении начального угла возникают большие ошибки декодирования. В [9], ATO, основанный на компенсации ускорения, использовался для уменьшения ошибок стационарного декодирования в условиях ускорения. Однако реализация этого метода относительно сложна.
В первом методе операция арктангенса применяется непосредственно к демодулированному сигналу, поэтому шум сильно влияет на результаты декодирования. ATO использует метод управления с обратной связью для расчета угла, но при вычислении начального угла возникают большие ошибки декодирования. В [9], ATO, основанный на компенсации ускорения, использовался для уменьшения ошибок стационарного декодирования в условиях ускорения. Однако реализация этого метода относительно сложна.
Программный метод декодирования стал лучшим выбором для многих приложений благодаря его низкой стоимости и гибкости. Однако точность и помехоустойчивость существующих программных методов нуждаются в дальнейшем улучшении [13]. Преобразование Гильберта удобно для извлечения огибающей сигнала, о котором упоминается в [14], но подробное обсуждение того, как его применять при декодировании преобразователя, отсутствует. В последние годы преобразование Гильберта в основном применялось для сейсмического анализа и обнаружения нарушений качества электросетей [15–18].
В этой статье, объединяющей преимущества преобразования Гильберта в извлечении огибающей и ATO в вычислении угла, предлагается новый метод декодирования резольвера для различных условий. Во-первых, преобразование Гильберта используется для преобразования сигналов резольвера в аналитический сигнал и извлечения их модульной огибающей. Затем, после фильтрации модульной огибающей, формируется сигнал идеальной демодуляции с использованием правила полярности и линеаризации пересечения нуля. Наконец, улучшенный ATO используется для декодирования демодулированного сигнала для получения угла поворота. С помощью моделирования в различных условиях было подтверждено, что ошибка декодирования предлагаемого метода составляет менее 0,5°, когда ОСШ составляет 30 дБ. По сравнению с другими методами, такими как метод обнаружения пиков и метод умножения возбуждения, предлагаемый метод обладает лучшими противошумовыми характеристиками.
2. Фонд
2.1. Основание резольвера
Принцип работы резольвера показан на рис. 1. Входным сигналом резольвера является сигнал возбуждения, а два ортогонально модулированных выходных сигнала генерируются двумя индукционными катушками, установленными вертикально [19].
1. Входным сигналом резольвера является сигнал возбуждения, а два ортогонально модулированных выходных сигнала генерируются двумя индукционными катушками, установленными вертикально [19].
и связаны с возбуждением и углом ротора , а связь между ними может быть выражена как где – амплитуда возбуждения, – угловая частота возбуждения, и k — коэффициент напряжения резольвера.
Из (1) видно, что выходные сигналы и связанные с пространственным относительным положением ротора, которое измеряется путем обнаружения , будут генерироваться при подаче на вход резольвера. Чтобы получить , конверты и должны быть извлечены с помощью математических инструментов. В этой статье используется преобразование Гильберта из-за его способности быстро обрабатывать нестационарные сигналы.
2.2. Основание Гильберта
Преобразование Гильберта можно рассматривать как выход линейной стационарной системы с входом , а его импульсная характеристика равна [20, 21], поэтому его можно выразить как где – интегральная переменная.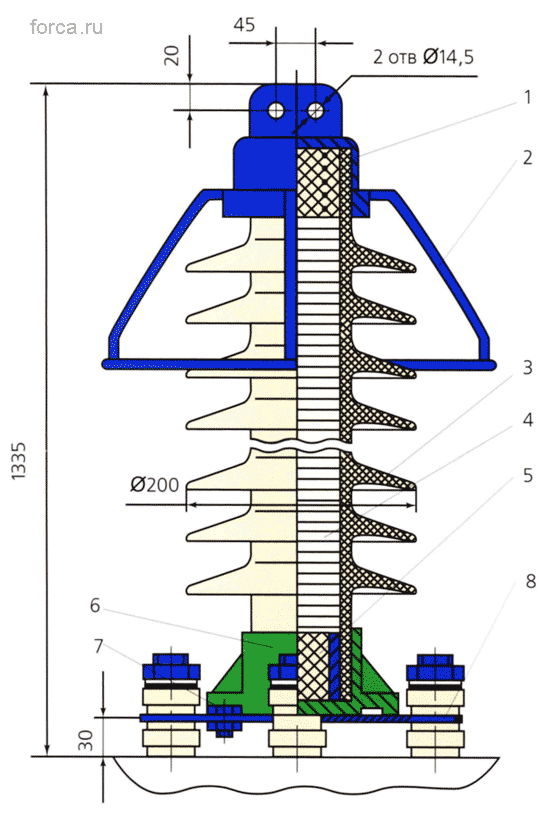
Аналитический сигнал может быть построен как где j — мнимый оператор.
Модульная огибающая сигнала резольвера может быть получена непосредственно с помощью преобразования Гильберта, а огибающая может быть выражена как
Полный сигнал демодуляции может быть получен путем наложения квадрантной интерпретации на модульную огибающую. И полный сигнал демодуляции будет использоваться для определения угла ротора на основе алгоритма, и это ATO в этой статье.
2.3. Основа ATO
Принцип ATO заключается в отслеживании угловой ошибки с помощью тригонометрической функции угловой разности с использованием обнаруженного демодуляционного сигнала. Как показано на фиг.2, и являются обнаруженными демодуляционными сигналами, и являются выходными данными АТО. Он использует последнюю оценку плюс, чтобы получить текущую оценку угла. Когда предполагаемый угол бесконечно близок к фактическому углу, ошибка бесконечно близка к нулю, как показано ниже:0003
Таким образом, значение может быть получено из предполагаемого .
3. Предложенная методика
Предложенный в этой статье метод декодирования преобразователя показан на рисунке 3. Преобразование Гильберта используется для получения аналитических сигналов и , которые соответствуют и , соответственно. Затем конверты модуля и получаются путем взятия модуля и фильтрации и . Демодуляция сигналов и достигается добавлением полярности к и . Наконец, улучшенный ATO используется для расчета угла ротора.
Как показано на рисунке 3, блок определения полярности используется для определения полярности и . Разница полярности между и находится в точке максимума , где представляет или и представляет или , поэтому P может быть выражена как где sign[] является знаковой функцией и является порядковым номером максимума .
Правило умножения принимается для получения сигналов демодуляции и , и правило может быть выражено как где представляет или , является номером выборки, а является порядковым номером минимума .
Как упоминалось выше, угол ротора получается путем выполнения ATO для полученных сигналов демодуляции и . ATO обычно имеет большую ошибку в решении начального угла [7]. В этой статье улучшенный ATO используется для решения начальных углов и . Основываясь на ATO, улучшенный ATO выполняет итеративную операцию для непрерывного уменьшения ошибки, и ее можно выразить как где и являются углом двух соседних итераций и коэффициентом усиления, и ему можно присвоить значение от 1 до 1,026 [8] . Поскольку угол может быть быстро аппроксимирован улучшенным ATO посредством итерации, K 1 = 1 принято в этой статье, чтобы избежать колебания результата, вызванного чрезмерным значением.
ATO обычно имеет большую ошибку в решении начального угла [7]. В этой статье улучшенный ATO используется для решения начальных углов и . Основываясь на ATO, улучшенный ATO выполняет итеративную операцию для непрерывного уменьшения ошибки, и ее можно выразить как где и являются углом двух соседних итераций и коэффициентом усиления, и ему можно присвоить значение от 1 до 1,026 [8] . Поскольку угол может быть быстро аппроксимирован улучшенным ATO посредством итерации, K 1 = 1 принято в этой статье, чтобы избежать колебания результата, вызванного чрезмерным значением.
Итеративное условие завершения (8) и (9) состоит в том, что ошибка меньше определенного заданного значения. В это время можно считать, что полученное равно .
Таким образом, предлагаемый метод декодирования резольвера реализуется в следующие этапы: Шаг 1: формулы (2) и (3) используются для обработки входных сигналов и получения соответствующего аналитического сигнала и двух сигналов Шаг 2 : амплитуды и , т. е. модульные огибающие и , получаются по формуле (4) Шаг 3: используется КИХ-фильтр для сглаживания модульных огибающих, чтобы получить и Шаг 4: формула (6) используется для получения значение полярности P , а формула (7) используется для определения полярности и получения сигналов демодуляции и Шаг 5: формулы (8) и (9) используются для итеративного вычисления расчетного угла до тех пор, пока ошибка не станет меньше определенного набора значение
е. модульные огибающие и , получаются по формуле (4) Шаг 3: используется КИХ-фильтр для сглаживания модульных огибающих, чтобы получить и Шаг 4: формула (6) используется для получения значение полярности P , а формула (7) используется для определения полярности и получения сигналов демодуляции и Шаг 5: формулы (8) и (9) используются для итеративного вычисления расчетного угла до тех пор, пока ошибка не станет меньше определенного набора значение
В соответствии с приведенными выше шагами алгоритма расчет этого алгоритма в основном состоит из трех аспектов, то есть (1) с использованием преобразования Гильберта для формирования аналитического сигнала, (2) с использованием КИХ для фильтрации сигнала демодуляции и (3) ) с использованием ATO для декодирования угла. Если обработанные данные N точек, то для реализации (1) необходимо N точек БПФ и N точек IFFT, что является ее основным расчетом [22]. В (2) для вычисления КИХ требуется N × R раз умножения и накопления, где R — порядок КИХ. В (3) необходимо вычислить умножение и накопление 2 × N на синус и косинус. Очевидно, что если вычислить синус и косинус по таблице, объем вычислений можно уменьшить. Поскольку резолвер-декодер должен обрабатывать два упомянутых выше сигнала, объем вычислений необходимо удвоить. MATLAB используется для запуска алгоритма на компьютере с процессором i5 2,3 ГГц, а время выполнения составляет около 0,3 мс при длине данных 256 точек и КИХ-порядке 102. Как правило, частота дискретизации системы декодирования распознавателя ниже, чем 250 кГц, а выборка 256 точек данных занимает более 1 мс. Таким образом, алгоритм в этой статье может работать в режиме реального времени.
В (3) необходимо вычислить умножение и накопление 2 × N на синус и косинус. Очевидно, что если вычислить синус и косинус по таблице, объем вычислений можно уменьшить. Поскольку резолвер-декодер должен обрабатывать два упомянутых выше сигнала, объем вычислений необходимо удвоить. MATLAB используется для запуска алгоритма на компьютере с процессором i5 2,3 ГГц, а время выполнения составляет около 0,3 мс при длине данных 256 точек и КИХ-порядке 102. Как правило, частота дискретизации системы декодирования распознавателя ниже, чем 250 кГц, а выборка 256 точек данных занимает более 1 мс. Таким образом, алгоритм в этой статье может работать в режиме реального времени.
4. Эксперименты
Для проверки работоспособности предложенного метода декодирования распознавателя были проведены эксперименты посредством моделирования в MATLAB. Начальный угол задан равным 30°, частота возбуждения f = 10 кГц, частота дискретизации f с = 160 кГц, амплитуда возбуждения 10 В,
K K резольвер установлен как постоянная скорость движения вперед.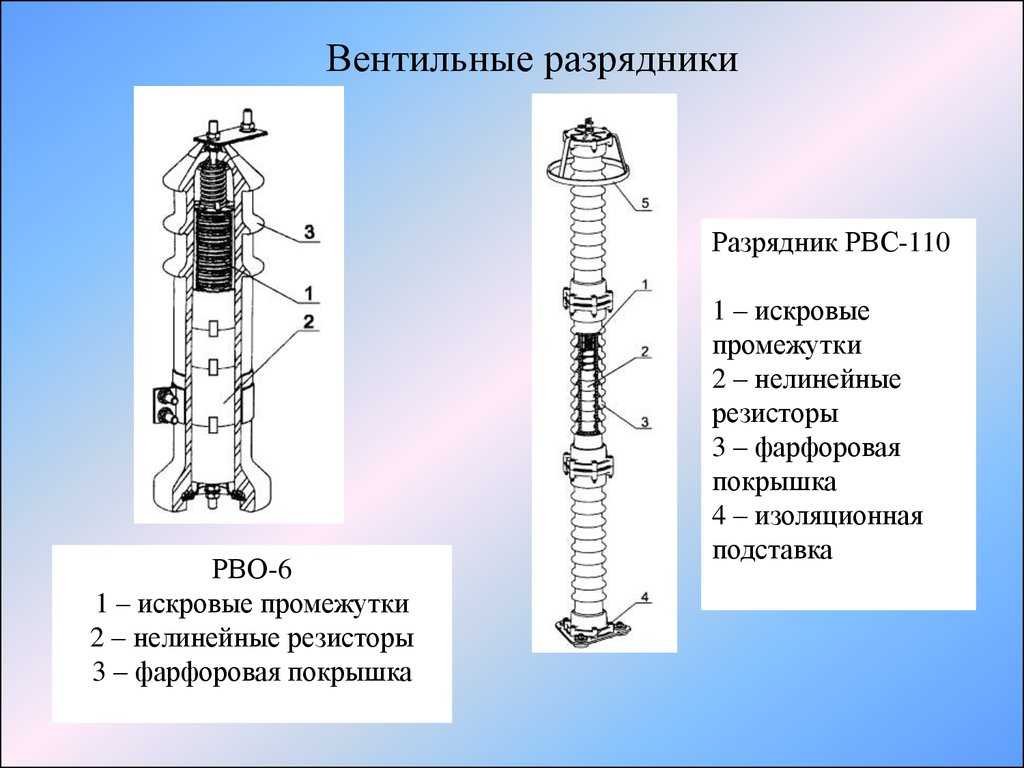 Исходные сигналы и показаны на рис. 4.9.0003
Исходные сигналы и показаны на рис. 4.9.0003 4.1. В условиях шума
В качестве примера возьмем рабочие условия средней скорости (2000 об/мин), шум накладывается на исходный сигнал, а SNR устанавливается на 30 дБ. Результаты моделирования показаны на рис. 5. На рис. 5(а) показан сигнал демодуляции, но он не фильтруется. На рис. 5(b) показаны исходный сигнал и предполагаемый угол, полученные с помощью ATO. Рисунок 5(c) показывает ошибку. Видно, что на демодулированный сигнал серьезно влияют шумы из-за отсутствия фильтрации, что приводит к большой ошибке в , а максимум ошибки близок к 25°. Поэтому для уменьшения ошибок используется фильтр, как показано на рисунке 3, а результаты моделирования с использованием фильтра показаны на рисунке 6.
Как показано на рис. 6, угловая ошибка ротора явно уменьшается, а максимальная ошибка приходится на точку пересечения нуля демодуляционным сигналом, которая составляет около 2°. Это связано с тем, что фильтр не только отфильтровывает шум, но и сглаживает экстремум огибающей модуля, что делает переход сигнала демодуляции через ноль прерывистым.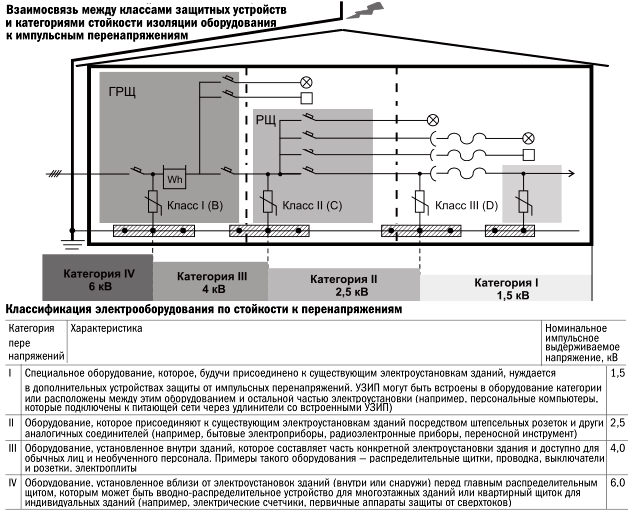 Чтобы уменьшить ошибку, участок пересечения нуля демодулированного сигнала перед передачей в улучшенный ATO для разрешения линеаризуется. Принцип линеаризации пересечения нуля заключается в том, чтобы взять точку преобразования полярности в качестве центра, взять точку сигнала демодуляции с расстоянием n l от точки преобразования полярности в качестве двух конечных точек, а затем обновить данные между двумя концами с помощью линейного уравнения. Таким образом, искажение сигнала пересечения нуля, вызванное ослаблением экстремальной точки, может быть устранено. Обычно n l может быть от 5 до 20. Результаты моделирования после линеаризации показаны на рис. 7.
Чтобы уменьшить ошибку, участок пересечения нуля демодулированного сигнала перед передачей в улучшенный ATO для разрешения линеаризуется. Принцип линеаризации пересечения нуля заключается в том, чтобы взять точку преобразования полярности в качестве центра, взять точку сигнала демодуляции с расстоянием n l от точки преобразования полярности в качестве двух конечных точек, а затем обновить данные между двумя концами с помощью линейного уравнения. Таким образом, искажение сигнала пересечения нуля, вызванное ослаблением экстремальной точки, может быть устранено. Обычно n l может быть от 5 до 20. Результаты моделирования после линеаризации показаны на рис. 7.
Как показано на рис. 7(а), устраняется крутизна точки перехода сигнала демодуляции через нуль, и, как видно из рис. 7(б), угловая ошибка снижается до менее 0,5°. Следовательно, используя преобразование Гильберта, фильтр и линеаризацию пересечения нуля, можно получить точный сигнал демодуляции в условиях шума, а точный угол можно определить с помощью улучшенного ATO.
4.2. При различных условиях скорости вращения
Для проверки эффективности предложенного метода при различных условиях работы были использованы четыре рабочих режима, а именно сверхнизкая скорость вращения (100 об/мин), низкая скорость вращения (1000 об/мин), средняя скорость вращения (2000 об/мин). об/мин) и высокая скорость вращения (8000 об/мин) настроены для эксперимента по адаптивности, а уровень шума составляет 30 дБ. Проведено большое количество экспериментов в различных условиях работы, и для статистического анализа случайным образом отбирается участок сигналов (2500 отсчетов) и их декодированные результаты. На рис. 8 показаны сигнал демодуляции, угол декодирования и ошибка в условиях сверхнизкой скорости, низкой скорости и высокой скорости соответственно. Статистика угловых ошибок при различных условиях работы представлена в таблице 1.
Из таблицы 1 видно, что максимальные угловые ошибки при различных условиях работы составляют менее 0,5°. По результатам расшифровки угол ротора при различных условиях работы может быть точно получен предложенным методом, что также подтверждается экспериментальными результатами, что он обладает адаптивностью к условиям работы. Следует отметить, что среднее значение угловой ошибки в условиях сверхнизкой скорости положительное, а в других условиях отрицательное, как показано в таблице 1. Это связано с тем, что предлагаемый алгоритм содержит блок фильтрации (рис. 3), который может отфильтровывать шум и ослаблять быстро меняющиеся сигналы. Однако сигнал изменяется очень медленно в условиях сверхнизкой скорости и практически не ослабляется фильтром, поэтому оценочное значение будет больше реального значения под влиянием шума.
Следует отметить, что среднее значение угловой ошибки в условиях сверхнизкой скорости положительное, а в других условиях отрицательное, как показано в таблице 1. Это связано с тем, что предлагаемый алгоритм содержит блок фильтрации (рис. 3), который может отфильтровывать шум и ослаблять быстро меняющиеся сигналы. Однако сигнал изменяется очень медленно в условиях сверхнизкой скорости и практически не ослабляется фильтром, поэтому оценочное значение будет больше реального значения под влиянием шума.
4.3. Сравнение противошумной способности
Для сравнения противошумных характеристик предложенного метода с другими методами был проведен сравнительный эксперимент с методом пикового детектирования [8] и методом мультипликативного возбуждения [9]. Все методы используют один и тот же фильтр и добавляют шум, чтобы сделать SNR сигналов резольвера 40 дБ и 30 дБ в условиях средней скорости. Результаты представлены в таблице 2. Как видно из таблицы 2, с увеличением уровня шума увеличивается и максимальная угловая ошибка этих трех методов. Однако на метод, описанный в этой статье, меньше всего влияет шум, в то время как на метод обнаружения пиков шум больше всего.
Однако на метод, описанный в этой статье, меньше всего влияет шум, в то время как на метод обнаружения пиков шум больше всего.
5. Заключение
Сложность декодирования преобразователя заключается в достижении наилучшего баланса между стоимостью и доступностью. Если технология декодирования, основанная на программном обеспечении, сможет удовлетворить фактические требования, система декодирования будет иметь ценовое преимущество. В этой статье предлагается новый метод расчета угла поворота с использованием преобразования Гильберта и улучшенного ATO, который может адаптироваться к различным условиям работы резольвера и удовлетворять требованиям точности и реального времени. Аналитический сигнал, сформированный преобразованием Гильберта, может эффективно извлекать огибающую сигнала; линеаризация пересечения нуля может устранить ошибку, вызванную фильтром в точке минимума огибающей модуля. Ошибка декодирования предлагаемого метода составляет менее 0,5 ° при SNR 30 дБ, а время алгоритма менее 0,3 мс при длине данных 256 точек, что может удовлетворить требования к точности и реальному времени практических приложений. По сравнению с другими методами он также имеет преимущества в помехозащищенности. Поэтому, как недорогой метод программного декодирования, этот метод имеет хорошую перспективу применения. Это правда, что для того, чтобы предлагаемый метод работал в реальной системе, необходимо дополнительно изучить программный и аппаратный дизайн, основанный на микросхеме DSP.
По сравнению с другими методами он также имеет преимущества в помехозащищенности. Поэтому, как недорогой метод программного декодирования, этот метод имеет хорошую перспективу применения. Это правда, что для того, чтобы предлагаемый метод работал в реальной системе, необходимо дополнительно изучить программный и аппаратный дизайн, основанный на микросхеме DSP.
Доступность данных
Данные не использовались для поддержки этого исследования.
Конфликт интересов
Авторы заявляют об отсутствии конфликта интересов.
Благодарности
Эта работа была поддержана Фондом научных исследований Хунаньского департамента образования Китая (18A272).
Ссылки
T. Shi, Y. Hao, G. Jiang, Z. Wang и C. Xia, «Метод преобразования резольвера в цифру, основанный на прямоугольном возбуждении», IEEE Transactions on Industrial Electronics , vol. 65, нет. 9, стр. 7211–7219, 2018.
Посмотреть по адресу:
Сайт издателя | Google Scholar
Л.
 Б. Брахим, М. Бенаммар и М. А. Альхамади, «Оценка угла резольвера на основе его сигнала возбуждения», IEEE Transactions on Industrial Electronics , vol. 56, нет. 2, стр. 574–580, 2009 г.
Б. Брахим, М. Бенаммар и М. А. Альхамади, «Оценка угла резольвера на основе его сигнала возбуждения», IEEE Transactions on Industrial Electronics , vol. 56, нет. 2, стр. 574–580, 2009 г.Посмотреть по адресу:
Сайт издателя | Google Scholar
Йи Дж., Чжоу М., Ли З. и Ли Дж. «Новый метод оценки фундаментальных и гармонических параметров с использованием неэргодического $S$-преобразования», IEEE Transactions on Instrumentation and Measurement , vol. 68, нет. 10, стр. 3503–3513, 2019.
Посмотреть по адресу:
Сайт издателя | Google Scholar
Y. Xi, Z. Li, X. Tang и X. Zeng, «Классификация нарушений качества электроэнергии на основе S-преобразования с помощью KF-ML и многослойных нейронных сетей с прямой связью», IET Generation, Передача и распределение , том. 14, нет. 19, стр.
 4010–4020, 2020.
4010–4020, 2020.Посмотреть по адресу:
Сайт издателя | Академия Google
К. Р. Дебопома и К. Сураджит, «Анализ неисправностей в солнечно-ветровой микросети с использованием анализа с несколькими разрешениями и статистического анализа на основе преобразования Стоквелла», IET Science, Measurement & Technology , vol. 14, нет. 6, стр. 639–650, 2020.
Посмотреть по адресу:
Сайт издателя | Google Scholar
Н. М. Хоа и Л. В. Дай, «Обнаружение и классификация нарушений качества электроэнергии в энергосистеме с использованием модифицированной комбинации методов преобразования Стоквелла и дерева решений», Энергия , т. 13, нет. 14, стр. 1–30, 2020.
Посмотреть по адресу:
Сайт издателя | Google Scholar
В.
 Дэн, Дж. Сюй, Ю. Сонг и Х. Чжао, «Алгоритм дифференциальной эволюции с базисной функцией вейвлета и оптимальной стратегией мутации для сложной задачи оптимизации», Журнал прикладных программных вычислений , том. 100, нет. 3, ID статьи 106724, 2021.
Дэн, Дж. Сюй, Ю. Сонг и Х. Чжао, «Алгоритм дифференциальной эволюции с базисной функцией вейвлета и оптимальной стратегией мутации для сложной задачи оптимизации», Журнал прикладных программных вычислений , том. 100, нет. 3, ID статьи 106724, 2021.Посмотреть по адресу:
Сайт издателя | Google Scholar
Д. А. Хабури, «Программный преобразователь преобразователя в цифру для приводов на основе DSP с использованием улучшенного наблюдателя с отслеживанием угла», IEEE Transactions on Instrumentation and Measurement , vol. 61, нет. 4, стр. 922–929, 2012 г.
Посмотреть по адресу:
Сайт издателя | Google Scholar
Ф. Ван, Т. Ши, Ю. Ян, З. Ван и К. Ся, «Преобразование резольвера в цифру на основе наблюдателя слежения за углом с компенсацией ускорения», IEEE Transactions on Instrumentation and Измерение , об.
 68, нет. 10, стр. 3494–3502, 2019.
68, нет. 10, стр. 3494–3502, 2019.Посмотреть по адресу:
Сайт издателя | Академия Google
C. Attaianese и G. Tomasso, «Измерение положения в промышленных приводах с помощью недорогого преобразователя в цифровой», IEEE Transactions on Instrumentation and Measurement , vol. 56, нет. 6, стр. 2155–2159, 2007.
Посмотреть по адресу:
Сайт издателя | Google Scholar
Дж. Ван, М. Чжу и Л. Дин, «Помехоустойчивые методы преобразования Н/Д на основе программного обеспечения с использованием метода избыточной выборки», Компьютеры и электротехника , том. 38, нет. 6, стр. 1636–1646, 2012.
Посмотреть по адресу:
Сайт издателя | Google Scholar
Р. Чжао, С. Тао, Д. Лю и С. Тянь, «Исследование алгоритма декодирования вращающегося трансформатора на основе наблюдателя угла», Технология силовой электроники , том.
 46, нет. 4, стр. 1–3, 2012.
46, нет. 4, стр. 1–3, 2012.Просмотр по адресу:
Google Scholar
Х. Санейе, Р. Алипур-Сараби, З. Насири-Гейдари и Ф. Тутунчиан, «Проблемы конечно-элементного анализа». резольверов», IEEE Transactions on Energy Conversion , vol. 34, нет. 2, стр. 973–983, 2019.
Посмотреть по адресу:
Сайт издателя | Google Scholar
L. Wynne, H. Ballantyne, X. Li, A. Falco и S. Schulz, «Метод преобразования Гильберта для измерения линейных и нелинейных фазовых сдвигов, создаваемых метаповерхностями», Photonics and Nanostructures — Fundamentals и Приложения , том. 42, стр. 1–13, 2020.
Посмотреть по адресу:
Сайт издателя | Академия Google
З. Ли, «Применение преобразования Гильберта в обработке данных георадара», Energy and Environmental Protection , vol.
 42, нет. 7, pp. 105–109, 2020.
42, нет. 7, pp. 105–109, 2020.Просмотр по адресу:
Google Scholar
С. Чжун, Ю. Ван, Ю. Чжэн и С. Чанг, «Миграция в обратном направлении георадара с полное разложение волнового поля на основе преобразования Гильберта», Geophysical Prospecting , vol. 68, нет. 2020. Т. 4. С. 1097–1112.
Посмотреть по адресу:
Сайт издателя | Google Scholar
Б. Тахери, С. А. Хоссейни, Х. Аскариан-Абианех и Ф. Разави, «Обнаружение качания мощности и блокировка третьей зоны дистанционных реле с помощью комбинированного использования разложения по эмпирическим модам и преобразования Гильберта, IET Generation, Transmission & Distribution , vol. 14, нет. 6, стр. 1062–1076, 2020.
Посмотреть по адресу:
Сайт издателя | Google Scholar
B.
 Lv, X. Chen, H. Xu, Y. Liu, X. Luo и C. Zhou, «Применение оконного двумерного преобразования Гильберта в трехмерном сейсмическом объемном обнаружении границ», Нефтяные геофизические исследования , том. 55, нет. 3, стр. 661–668+473, 2020.
Lv, X. Chen, H. Xu, Y. Liu, X. Luo и C. Zhou, «Применение оконного двумерного преобразования Гильберта в трехмерном сейсмическом объемном обнаружении границ», Нефтяные геофизические исследования , том. 55, нет. 3, стр. 661–668+473, 2020.Посмотреть по адресу:
Google Scholar
Ю. Сюй, В. Гао и Д. Сюй, «Проектирование системы резольвера на основе DSP», Электрические Измерительная техника , вып. 38, нет. 1, стр. 54–58, 2015.
Просмотр по адресу:
Google Scholar
К. Карами, П. Фатехи и А. Яздани, «Системная идентификация структур в режиме онлайн с использованием вейвлет-гильбертовского преобразования и анализ разреженных компонентов», Компьютеризированное гражданское и инфраструктурное проектирование , том. 35, нет. 8, стр. 870–886, 2020.
Посмотреть по адресу:
Сайт издателя | Google Scholar
Т.
 Беттахар, К. Рахмун, Д. Беназзуз и Б. Меринани, «Новый метод диагностики неисправностей зубчатых колес с использованием эмпирического вейвлет-преобразования, преобразования Гильберта и метрики подобия косинуса», Достижения в области машиностроения , том. 12, нет. 6, стр. 1–11, 2020.
Беттахар, К. Рахмун, Д. Беназзуз и Б. Меринани, «Новый метод диагностики неисправностей зубчатых колес с использованием эмпирического вейвлет-преобразования, преобразования Гильберта и метрики подобия косинуса», Достижения в области машиностроения , том. 12, нет. 6, стр. 1–11, 2020.Посмотреть по адресу:
Сайт издателя | Академия Google
Л. Марпл, «Вычисление дискретного «аналитического» сигнала с помощью БПФ», IEEE Transactions on Signal Processing , vol. 47, нет. 9, стр. 2600–2603, 1999.
Посмотреть по адресу:
Сайт издателя | Google Scholar
Copyright
Copyright © 2021 Jiliang Yi et al. Это статья с открытым доступом, распространяемая в соответствии с лицензией Creative Commons Attribution License, которая разрешает неограниченное использование, распространение и воспроизведение на любом носителе при условии надлежащего цитирования оригинальной работы.
Расшифровка отдельных движений пальцев одной руки с использованием сигналов ЭЭГ человека
1. Wolpaw JR, Birbaumer N, McFarland DJ, Pfurtscheller G, Vaughan TM (2002) Интерфейсы мозг-компьютер для связи и управления. Клиническая нейрофизиология 113: 767–791. [PubMed] [Google Scholar]
2. Бирбаумер Н. (2006) Нарушая тишину: интерфейсы мозг-компьютер (BCI) для связи и управления двигателем. Психофизиология 43: 517–532. [PubMed] [Google Scholar]
3. Шварц А.Б. (2004)Корковое нейронное протезирование. Ежегодный обзор неврологии 27: 487–507. [PubMed] [Академия Google]
4. Шварц А.Б., Куи Х.Т., Вебер Дуглас Дж., Моран Д.В. (2006) Интерфейсы, управляемые мозгом: восстановление движения с помощью нейронных протезов. Нейрон 52: 205–220. [PubMed] [Google Scholar]
5.
Брэдберри Т.Дж., Джентили Р.Дж., Контрерас-Видаль Дж.Л. (2010) Реконструкция трехмерных движений рук по неинвазивным электроэнцефалографическим сигналам. Журнал неврологии
30: 3432–3437. [Бесплатная статья PMC] [PubMed] [Google Scholar]
[Бесплатная статья PMC] [PubMed] [Google Scholar]
6. Wolpaw JR, McFarland DJ (2004)Управление двумерным сигналом движения с помощью неинвазивного интерфейса мозг-компьютер у людей. ПНАС 101: 17849–17854. [Бесплатная статья PMC] [PubMed] [Google Scholar]
7. Миллер К.Дж., Шалк Г., Фетц Э.Е., Нийс М.д., Оджеманн Д.Г. и соавт. (2010)Корковая активность во время двигательного выполнения, двигательных образов и онлайн-отзывов на основе образов. ПНАС 107: 4430–4435. [Бесплатная статья PMC] [PubMed] [Google Scholar]
8. Пистол Т., Шульце-Бонхаге А., Артсен А., Меринг С., Болл Т. (2012) Расшифровка естественных типов захвата по ЭКоГ человека. НейроИзображение 59: 248–260. [PubMed] [Google Scholar]
9. Chang G-C, Kang W-J, Luh J-J, Cheng C-K, Lai J-S и др. (1996) Реализация распознавания образов электромиограммы в режиме реального времени как управляющей команды человеко-машинного интерфейса. Медицинская инженерия и физика 18: 529–537. [PubMed] [Google Scholar]
10. Бустани Р., Моради М.Х. (2003)Оценка характеристик сигнала ЭМГ предплечья для управления протезом руки. Физиологическое измерение
24: 309–319. [PubMed] [Google Scholar]
Бустани Р., Моради М.Х. (2003)Оценка характеристик сигнала ЭМГ предплечья для управления протезом руки. Физиологическое измерение
24: 309–319. [PubMed] [Google Scholar]
11. Ситарам Р., Кариа А., Вейт Р., Габер Т., Рота Г. и др. (2007) Интерфейс МРТ мозг-компьютер: инструмент для нейробиологических исследований и лечения. Вычислительный интеллект и нейробиология 2007: 1–10. [Бесплатная статья PMC] [PubMed] [Google Scholar]
12. Yoo SS, Fairneny T, Chen NK, Choo SE, Panych LP и др. (2004) Интерфейс мозг-компьютер с использованием фМРТ: пространственная навигация с помощью мыслей. Нейроотчет 15: 1591–1595. [PubMed] [Google Scholar]
13. Брэдберри Т.Дж., Ронг Ф., Контрерас-Видаль Дж.Л. (2009)Расшифровка скорости движения руки по центру наружу по сигналам МЭГ во время зрительно-моторной адаптации. НейроИзображение 47: 1691–1700. [PubMed] [Google Scholar]
14.
Койл С.М., Уорд Т.Э., Маркхэм К.М. (2007)Интерфейс мозг-компьютер с использованием упрощенной функциональной системы спектроскопии в ближней инфракрасной области. Журнал нейронной инженерии
4: 219–226. [PubMed] [Google Scholar]
Журнал нейронной инженерии
4: 219–226. [PubMed] [Google Scholar]
15. Wilson JA, Felton EA, Garell PC, Schalk G, Williams JC (2006) Факторы ЭКоГ, лежащие в основе мультимодального управления интерфейсом мозг-компьютер. IEEE Transactions по нейронным системам и реабилитационной инженерии 14: 246–250. [PubMed] [Google Scholar]
16. Шалк Г., Кубанек Дж., Миллер К.Дж., Андерсон Н.Р., Лойтхардт Е.К. и соавт. (2007)Расшифровка двумерных траекторий движения с использованием электрокортикографических сигналов у людей. Журнал нейронной инженерии 4: 264–275. [PubMed] [Академия Google]
17. Лал Т.Н., Хинтербергер Т., Видман Г., Шредер М., Хилл Дж. и др. (2005) Методы инвазивных компьютерных интерфейсов человеческого мозга. Достижения в системе обработки нейронной информации 17: 737–744. [Google Scholar]
18.
Фарвелл Л.А., Дончин Э. (1988)Говорить сгоряча: к ментальному протезу, использующему потенциалы мозга, связанные с событиями. Электроэнцеф Клин Нейрофизиол
70: 510–523. [PubMed] [Google Scholar]
[PubMed] [Google Scholar]
19. Бин Г, Гао С, Ян З, Хун Б, Гао С (2009 г.)) Многоканальный онлайн-интерфейс мозг-компьютер на основе SSVEP с использованием метода канонического корреляционного анализа. Журнал нейронной инженерии 6: 046002. [PubMed] [Google Scholar]
20. Gu Y, Dremstrup K, Farina D (2009)Однократное различение типа и скорости движений запястья по записям ЭЭГ. Клиническая нейрофизиология 120: 1596–1600. [PubMed] [Google Scholar]
21. Доуд А.Дж., Лукас Дж.П., Писанский М.Т., Хе Б. (2011)Непрерывное трехмерное управление воздушным вертолетом с использованием интерфейса мозг-компьютер, основанного на воображении движения. ПЛОС ОДИН 6: е26322. [Бесплатная статья PMC] [PubMed] [Google Scholar]
22. Чжоу Дж., Яо Дж., Дэн Дж., Девальд Дж. П.А. (2009) Классификация на основе ЭЭГ намерений скручивания локтя по сравнению с плечом с участием инсульта. Компьютеры в биологии и медицине 39: 443–452. [Бесплатная статья PMC] [PubMed] [Google Scholar]
23. Pfurtscheller G, Brunner C, Schlögl A, Lopes da Silva FH (2006) Мю-ритм (де)синхронизация и однократная классификация ЭЭГ для различных задач воображения движения. НейроИзображение
31: 153–159. [PubMed] [Google Scholar]
Pfurtscheller G, Brunner C, Schlögl A, Lopes da Silva FH (2006) Мю-ритм (де)синхронизация и однократная классификация ЭЭГ для различных задач воображения движения. НейроИзображение
31: 153–159. [PubMed] [Google Scholar]
24. Мораш В., Бай О., Фурлани С., Лин П., Халлетт М. (2008) Классификация сигналов ЭЭГ, предшествующих движениям правой руки, левой руки, языка и правой ноги, а также двигательным образам. Клиническая нейрофизиология 119: 2570–2578. [Бесплатная статья PMC] [PubMed] [Google Scholar]
25. Николя-Алонсо Л.Ф., Гомес-Хил Дж. (2012) Мозговые компьютерные интерфейсы, обзор. Датчики 12: 1211–1279. [Бесплатная статья PMC] [PubMed] [Google Scholar]
26. Хохберг Л.Р., Донохью Дж.П. (2006) Датчики для интерфейсов мозг-компьютер. Журнал IEEE Engineering in Medicine and Biology 25: 32–38. [PubMed] [Google Scholar]
27.
Pfurtscheller G, Lopes da Silva FH (1999) Синхронизация и десинхронизация ЭЭГ/МЭГ, связанные с событиями: основные принципы. Клиническая нейрофизиология
110: 1842–1857 гг. [PubMed] [Академия Google]
[PubMed] [Академия Google]
28. Нуньес П.Л., Шринивасан Р., редакторы (2006) Электрические поля мозга: нейрофизика ЭЭГ. Нью-Йорк: Издательство Оксфордского университета. [Google Scholar]
29. Acharya S, Fifer MS, Benz HL, Crone NE, Thakor NV (2010) Электрокортикографическая амплитуда предсказывает положение пальцев во время медленных хватательных движений руки. Журнал нейронной инженерии 7: 046002. [Бесплатная статья PMC] [PubMed] [Google Scholar]
30. Лебедев М.А., Николелис М.А.Л. (2006) Интерфейсы мозг-машина: прошлое, настоящее и будущее. Тенденции в нейронауках 29: 536–546. [PubMed] [Google Scholar]
31. Vuckovic A (2009) Неинвазивный BCI: Как далеко мы можем зайти с моторным воображением? Клиническая нейрофизиология 120: 1422–1423. [PubMed] [Google Scholar]
32. Вальдерт С., Прейссль Х., Демандт Э., Браун С., Бирбаумер Н. и др. (2008) Направление движения руки расшифровано по МЭГ и ЭЭГ. Журнал неврологии 28: 1000–1008. [Бесплатная статья PMC] [PubMed] [Google Scholar]
33. Мохамед А.К., Марвала Т., Джон Л.Р. (2011) Различение ЭЭГ в одном испытании между изображениями движений запястья и пальцев и выполнением в сенсомоторном BCI. 2011 Ежегодная международная конференция IEEE Engineering in Medicine and Biology Society. стр. 6289–6293. [PubMed]
Мохамед А.К., Марвала Т., Джон Л.Р. (2011) Различение ЭЭГ в одном испытании между изображениями движений запястья и пальцев и выполнением в сенсомоторном BCI. 2011 Ежегодная международная конференция IEEE Engineering in Medicine and Biology Society. стр. 6289–6293. [PubMed]
34. Zanos S, Miller KJ, Ojemann JG (2008) Электрокортикографические спектральные изменения, связанные с ипсилатеральным движением отдельного пальца и всей руки. 30-я ежегодная международная конференция IEEE Engineering in Medicine and Biology Society. стр. 5939–5942. [PubMed]
35. Flamary R, Rakotomamonjy A (2012) Декодирование движений пальцев по сигналам ЭКоГ с использованием линейных моделей переключения. Frontiers in Neuroscience 6. [Бесплатная статья PMC] [PubMed]
36. Liang N, Bougrain L (2012) Расшифровка сгибания пальцев на основе сигналов ЭКоГ, специфичных для полос, у людей. Frontiers in Neuroscience 6. [Бесплатная статья PMC] [PubMed]
37.
Кубанек Дж., Миллер К.Дж., Оджеманн Дж. Г., Вулпоу Дж.Р., Шалк Г. (2009)Расшифровка сгибания отдельных пальцев с использованием электрокортикографических сигналов у людей. Журнал нейронной инженерии
6: 66001. [Бесплатная статья PMC] [PubMed] [Google Scholar]
Г., Вулпоу Дж.Р., Шалк Г. (2009)Расшифровка сгибания отдельных пальцев с использованием электрокортикографических сигналов у людей. Журнал нейронной инженерии
6: 66001. [Бесплатная статья PMC] [PubMed] [Google Scholar]
38. Shenoy P, Miller KJ, Ojemann JG, Rao RPN (2007) Классификация движений пальцев для электрокортикографического BCI. 3-я Международная конференция IEEE/EMBS по нейронной инженерии. стр. 192–195.
39. Онаран И., Инс Н.Ф., Цетин А.Е. (2011) Классификация многоканальной ЭКоГ, связанной с движениями отдельных пальцев с избыточными пространственными проекциями. Ежегодная международная конференция IEEE Engineering in Medicine and Biology Society. стр. 5424–5427. [ПубМед]
40. Samiee S, Hajipour S, Shamsollahi MB (2010) Классификация сгибания пальцев по пяти классам с использованием сигналов ЭКоГ. Международная конференция по интеллектуальным и передовым системам. стр. 1–4.
41. Wang W, Degenhart AD, Collinger JL, Vinjamuri R, Sudre GP, et al. (2009) Двигательная активность коры головного мозга человека, зарегистрированная с помощью электродов Micro-ECoG, во время движений отдельных пальцев. Ежегодная международная конференция IEEE Engineering in Medicine and Biology Society, стр. 586–589. [Бесплатная статья PMC] [PubMed]
Ежегодная международная конференция IEEE Engineering in Medicine and Biology Society, стр. 586–589. [Бесплатная статья PMC] [PubMed]
42. Миллер К.Дж., Занос С., Фетц Э.Е., Нийс М.д., Оджеманн Дж.Г. (2009)Развязка спектра мощности коры головного мозга показывает представление отдельных движений пальцев у людей в реальном времени. Журнал неврологии 29: 3132–3137. [Бесплатная статья PMC] [PubMed] [Google Scholar]
43. Глейзер Е.М., Ручкин Д.С. (1976) Принципы анализа нейробиологических сигналов. Нью-Йорк: Академическая пресса. [Google Scholar]
44. Джайн Р.К., Датта С., Маджумдер С. (2012) Проектирование и управление искусственным мышечным пальцем на основе IPMC, управляемым ЭМГ. В: Найк Г.Р., редактор. Вычислительный интеллект в анализе электромиографии – взгляд на текущие приложения и будущие задачи: InTech.
45. Bundhoo V, Park EJ (2005) Дизайн искусственного пальца, приводимого в действие мышцей, в направлении биомиметических протезов рук. Материалы 12-й Международной конференции по передовой робототехнике: 368–375.
46. Миллер К.Дж., Шалк Г. (2008) Прогнозирование сгибания пальцев: 4-й конкурс данных интерфейса мозг-компьютер. Конкурс BCI IV.
47. Schalk G, McFarland DJ, Hinterberger T, Birbaumer N, Wolpaw JR (2004) BCI2000: система интерфейса мозг-компьютер (BCI) общего назначения. IEEE Transactions по биомедицинской инженерии 51: 1034–1043. [PubMed] [Академия Google]
48. Делорм А., Макейг С. (2004) EEGLAB: набор инструментов с открытым исходным кодом для анализа динамики ЭЭГ в одном испытании, включая анализ независимых компонентов. Журнал методов нейробиологии 134: 9–21. [PubMed] [Google Scholar]
49. Hyvärinen A, Karhunen J, Oja E (2001) Анализ независимых компонентов. Нью-Йорк: Уайли. [Google Академия]
50. Белл А.Дж., Сейновски Т.Дж. (1995)Подход максимизации информации к слепому разделению и слепой деконволюции. Нейронные вычисления 7: 1129–1159. [PubMed] [Google Scholar]
51.
Mognon A, Jovicich J, Bruzzone L, Buiatti M (2011) ADJUST: автоматический детектор артефактов ЭЭГ, основанный на совместном использовании пространственных и временных характеристик. Психофизиология
48: 229–240. [PubMed] [Google Scholar]
Психофизиология
48: 229–240. [PubMed] [Google Scholar]
52. Welford AT (1980) Время реакции. Нью-Йорк: Академическая пресса. [Google Scholar]
53. McFarland DJ, McCane LM, David SV, Wolpaw JR (1997) Выбор пространственного фильтра для связи на основе ЭЭГ. Электроэнцефалография и клиническая нейрофизиология 103: 386–394. [PubMed] [Google Scholar]
54. Мюллер К.Р., Крауледат М., Дорнхеге Г., Курио Г., Бланкерц Б. (2004)Методы машинного обучения для интерфейсов мозг-компьютер. Биомедицинская инженерия 49: 11–22. [Google Scholar]
55. Вапник В.Н. (1998) Статистическая теория обучения. Нью-Йорк: Wiley-Interscience. [Google Scholar]
56. Вапник В.Н. (1999) Природа статистической теории обучения. Нью-Йорк: Спрингер. [Google Scholar]
57. Chang CC, Lin CJ (2011) LIBSVM: библиотека для машин опорных векторов. Транзакции ACM по интеллектуальным системам и технологиям 2: 1–27. [Академия Google]
58. Hsu C-W, Chang C-C, Lin C-J (2010) Практическое руководство по поддержке классификации векторов. Национальный тайваньский университет. [Google Scholar]
Национальный тайваньский университет. [Google Scholar]
59. Хан Дж., Камбер М., Пей Дж. (2012) Интеллектуальный анализ данных: концепции и методы. Массачусетс, США: Морган Кауфманн. [Google Scholar]
60. Мюллер-Путц Г.Р., Шерер Р., Бруннер С., Либ Р., Пфуртшеллер Г. (2008) Лучше, чем случайно: более пристальный взгляд на результаты BCI. Международный журнал биоэлектромагнетизма 10: 52–55. [Google Scholar]
61. Пфуртшеллер Г., Аранибар А. (1977) Связанная с событием корковая десинхронизация, обнаруженная при измерении мощности скальповой ЭЭГ. Электроэнцефалография и клиническая нейрофизиология 42: 817–826. [PubMed] [Google Scholar]
62. Wolpaw JR, Birbaumer N, Heetderks WJ, McFarland DJ, Peckham PH и др. (2000) Технология интерфейса мозг-компьютер: обзор первой международной встречи. IEEE Transactions по реабилитационной инженерии 8: 164–173. [PubMed] [Google Scholar]
63.
Хан Ю, Сепульведа Ф (2010)Интерфейс мозг-компьютер для однократной классификации ЭЭГ для изображений движения запястья с использованием пространственной фильтрации в гамма-диапазоне. Обработка сигналов ИЭТ
4: 510–517. [Академия Google]
Обработка сигналов ИЭТ
4: 510–517. [Академия Google]
64. Бай О., Лин П., Ворбах С., Ли Дж., Фурлани С. и др. (2007) Исследование вычислительных методов для классификации намерения движения во время произвольного движения человека на основе однократной пробной ЭЭГ. Клиническая нейрофизиология 118: 2637–2655. [Бесплатная статья PMC] [PubMed] [Google Scholar]
65. Obermaier B, Guger C, Neuper C, Pfurtscheller G (2001) Скрытые марковские модели для онлайн-классификации данных ЭЭГ с одной пробой. Буквы распознавания образов 22: 1299–1309. [Академия Google]
66. Лехтонен Дж., Джиланки П., Кауханен Л., Сэмс М. (2008) Онлайн-классификация одиночных испытаний ЭЭГ во время движений пальцев. IEEE Transactions по биомедицинской инженерии 55: 713–720. [PubMed] [Google Scholar]
67. Liyanage SR, Xu JX, Guan C, Ang KK, Zhang CS, et al. Классификация самостоятельных движений пальцев с сигналами ЭЭГ с использованием нейронных сетей и эволюционных подходов 2009 г., 9-11 декабря 2009 г. , 1807–1812 гг.
, 1807–1812 гг.
68. Yong L, Xiaorong G, Hesheng L, Shangkai G (2004)Классификация однократной электроэнцефалограммы при движении пальцев. IEEE Transactions по биомедицинской инженерии 51: 1019–1025. [PubMed] [Google Scholar]
69. Xiang L, Dezhong Y, Wu D, Chaoyi L (2007) Объединение пространственных фильтров для классификации однократной ЭЭГ в задаче движения пальцев. IEEE Transactions по биомедицинской инженерии 54: 821–831. [PubMed] [Google Scholar]
70. Kauhanen L, Nykopp T, Sams M (2006)Классификация одиночных исследований MEG, связанных с движениями левого и правого указательных пальцев. Клиническая нейрофизиология 117: 430–439. [PubMed] [Google Scholar]
71. Quandt F, Reichert C, Hinrichs H, Heinze HJ, Knight RT, et al. (2012) Различение отдельных движений пальцев одной руки в одном испытании: комбинированное исследование МЭГ и ЭЭГ. Нейроизображение 59: 3316–3324. [Бесплатная статья PMC] [PubMed] [Google Scholar]
72.
Бланкерц Б., Дорнхеге Г. , Крауледат М., Мюллер К.Р., Кунцманн В. и др. (2006) Интерфейс мозг-компьютер в Берлине: общение на основе ЭЭГ без предметной подготовки. IEEE Transactions по нейронным системам и реабилитационной инженерии
14: 147–152. [PubMed] [Google Scholar]
, Крауледат М., Мюллер К.Р., Кунцманн В. и др. (2006) Интерфейс мозг-компьютер в Берлине: общение на основе ЭЭГ без предметной подготовки. IEEE Transactions по нейронным системам и реабилитационной инженерии
14: 147–152. [PubMed] [Google Scholar]
73. Шерер Р., Занос С.П., Миллер К.Дж., Рао Р.П.Н., Оджеманн Дж.Г. (2009)Классификация контралатеральных и ипсилатеральных движений пальцев для электрокортикографических интерфейсов мозг-компьютер. Нейрохирургический фокус 27: Е12. [PubMed] [Академия Google]
74. Хаггинс Дж., Рен П., Груис К. (2011) Чего хотят пользователи интерфейса мозг-компьютер? Мнения и приоритеты потенциальных пользователей с боковым амиотрофическим склерозом. Боковой амиотроф склеры 12: 318–324. [Бесплатная статья PMC] [PubMed] [Google Scholar]
75. Soechting JF, Flanders M (1997) Гибкость и повторяемость движений пальцев во время набора текста: анализ множественных степеней свободы. Журнал вычислительной неврологии 4: 29–46. [PubMed] [Google Scholar]
76. Сантелло М., Сочтинг Дж. Ф. (1997) Сопоставление размера объекта, контролируя размах пальцев и форму руки. Соматосенсорные и двигательные исследования
14: 203–212. [PubMed] [Google Scholar]
Сантелло М., Сочтинг Дж. Ф. (1997) Сопоставление размера объекта, контролируя размах пальцев и форму руки. Соматосенсорные и двигательные исследования
14: 203–212. [PubMed] [Google Scholar]
77. Дарвас Ф., Шерер Р., Оджеманн Дж. Г., Рао Р. П., Миллер К. Дж. и др. (2010) Картирование высокой гаммы с использованием ЭЭГ. НейроИзображение 49: 930–938. [Бесплатная статья PMC] [PubMed] [Google Scholar]
78. Болл Т., Демандт Э., Мучлер И., Нейцель Э., Меринг С. и др. (2008) Активность, связанная с движением, в высоком гамма-диапазоне человеческой ЭЭГ. НейроИзображение 41: 302–310. [PubMed] [Академия Google]
79. Гонсалес С.Л., Грав де Перальта Р., Тут Г., Миллан Дж.Д.Р., Мориер П. и др. (2006) Колебания очень высокой частоты (ОВЧ) как предиктор намерений движения. НейроИзображение 32: 170–179. [PubMed] [Google Scholar]
80.
Шеной П., Миллер К.Дж., Оджеманн Дж.Г., Рао РПН (2008)Обобщенные характеристики электрокортикографических ИМК. IEEE Transactions по биомедицинской инженерии
55: 273–280.
