
Асинхронный двигатель это
Асинхронный двигатель – принцип работы и устройство
8 марта 1889 года величайший русский учёный и инженер Михаил Осипович Доливо-Добровольский изобрёл трёхфазный асинхронный двигатель с короткозамкнутым ротором.
Современные трёхфазные асинхронные двигатели являются преобразователями электрической энергии в механическую. Благодаря своей простоте, низкой стоимости и высокой надёжности асинхронные двигатели получили широкое применение. Они присутствуют повсюду, это самый распространённый тип двигателей, их выпускается 90% от общего числа двигателей в мире. Асинхронный электродвигатель поистине совершил технический переворот во всей мировой промышленности.
Огромная популярность асинхронных двигателей связана с простотой их эксплуатации, дешивизной и надежностью.
Асинхронный двигатель – это асинхронная машина, предназначенная для преобразования электрической энергии переменного тока в механическую энергию.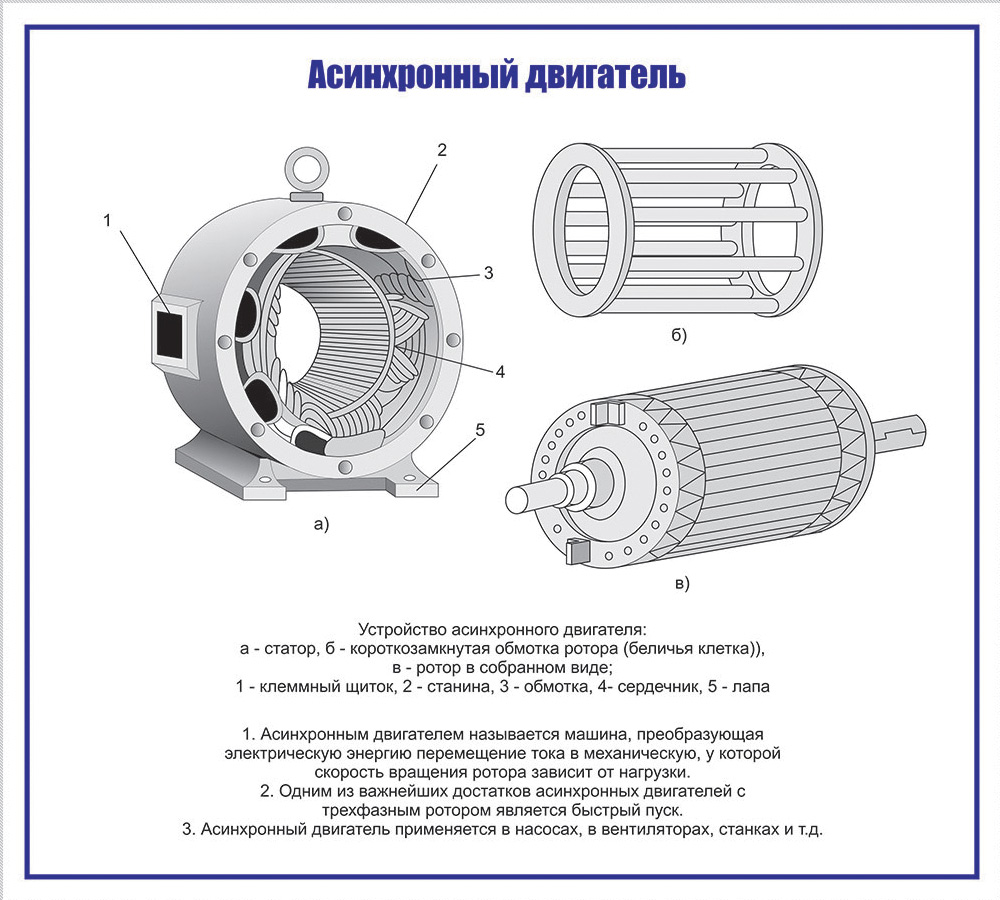
Устройство
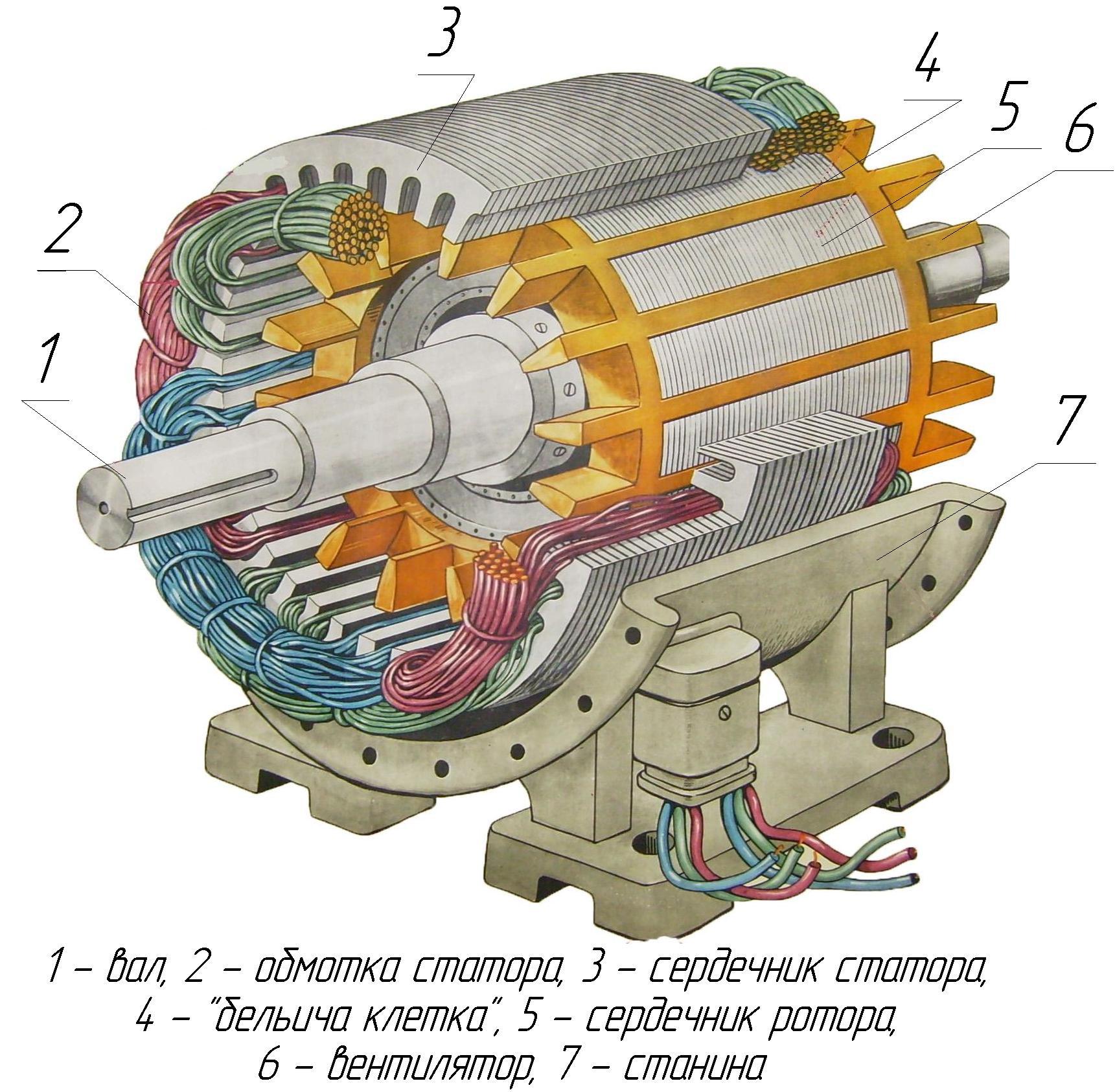
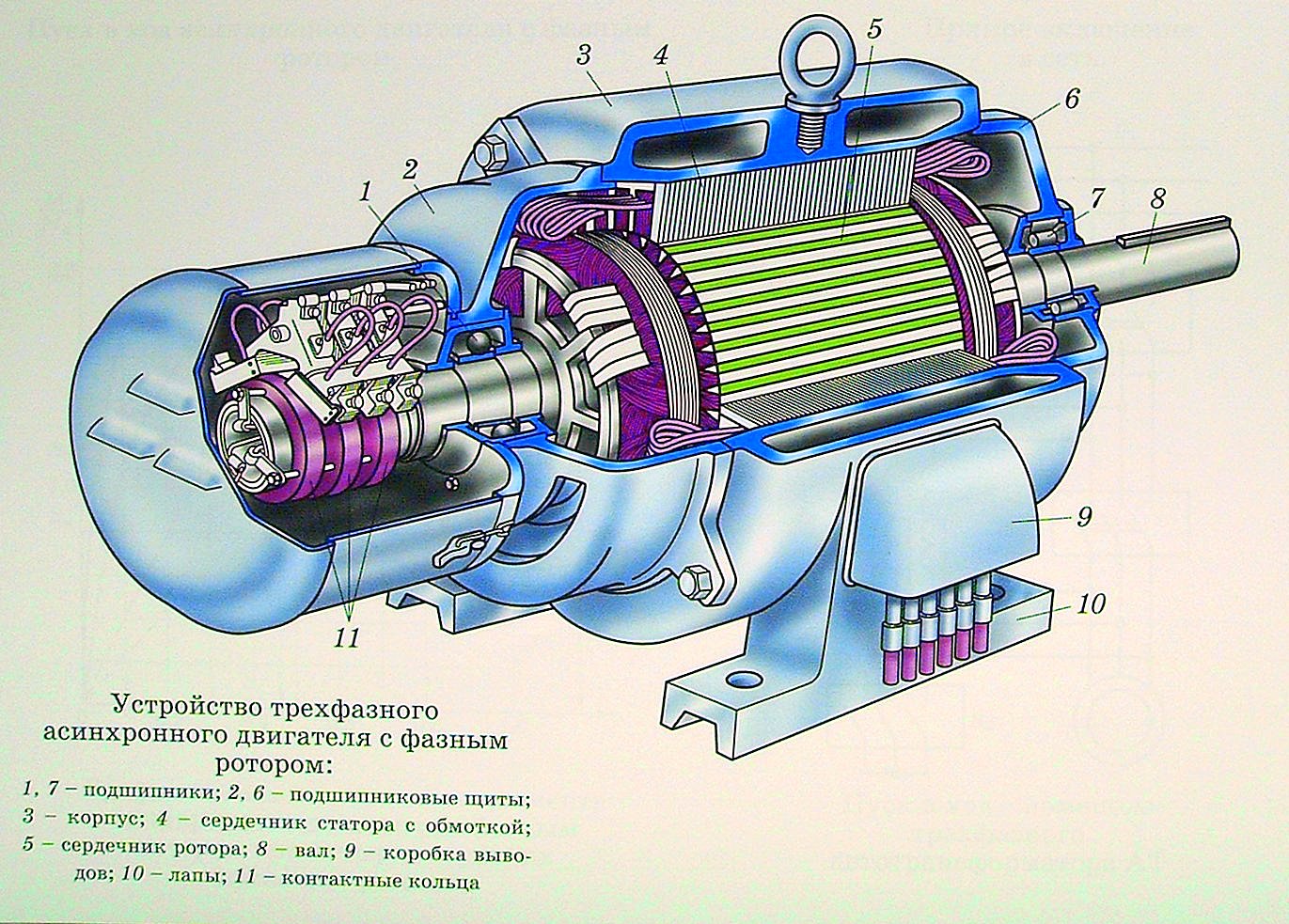
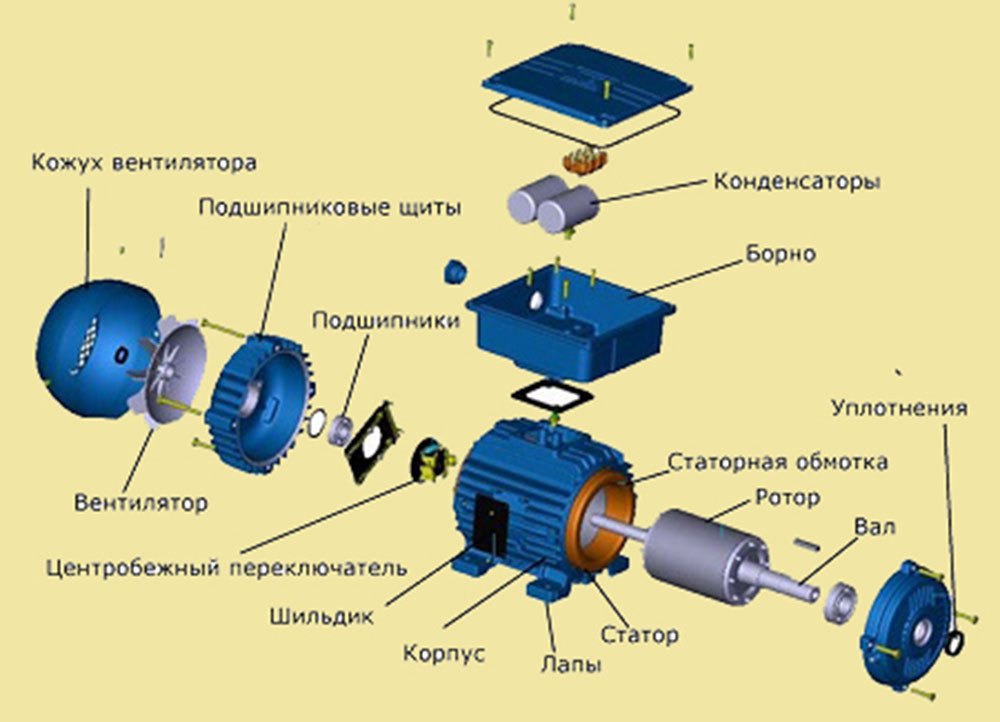
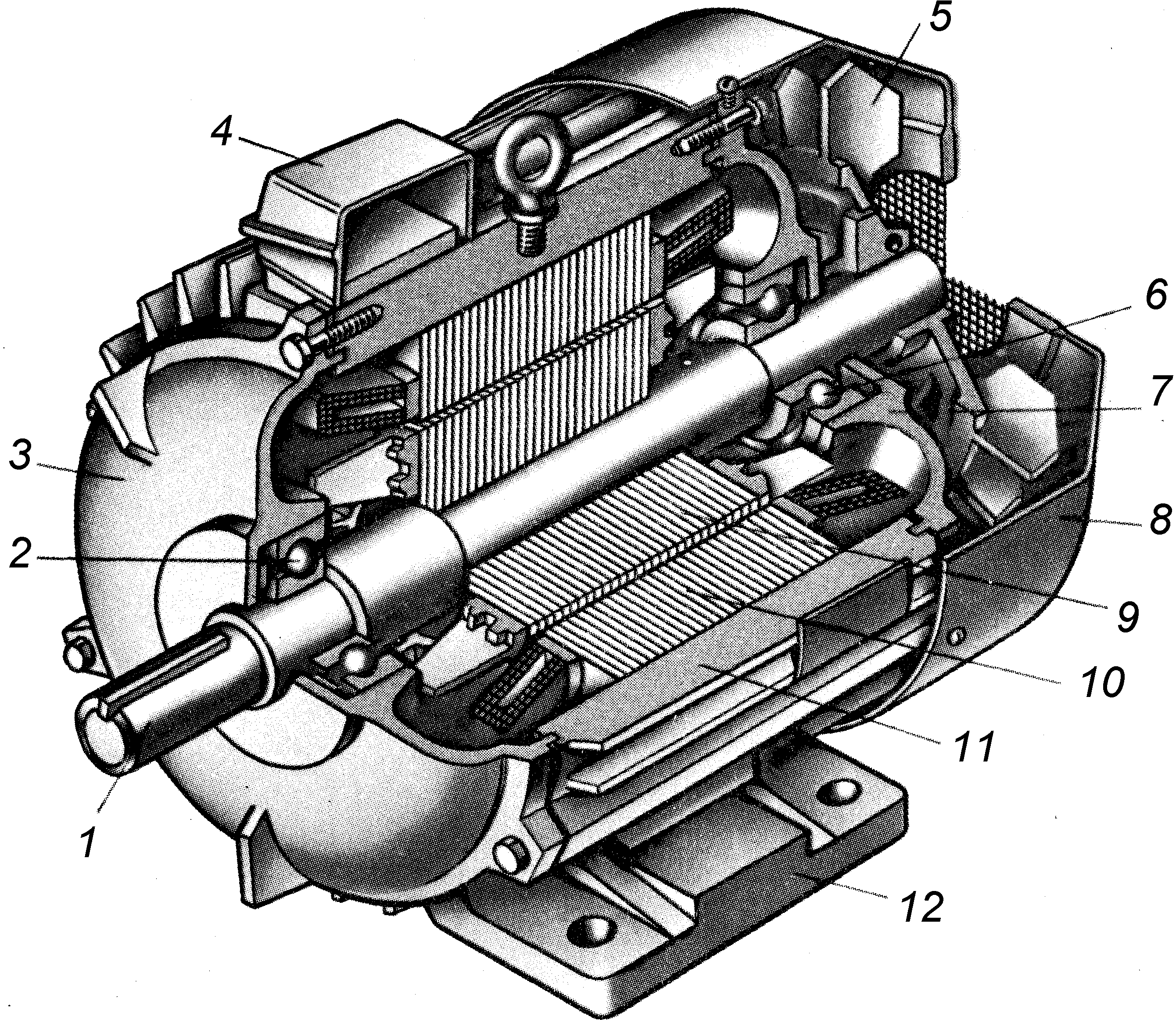
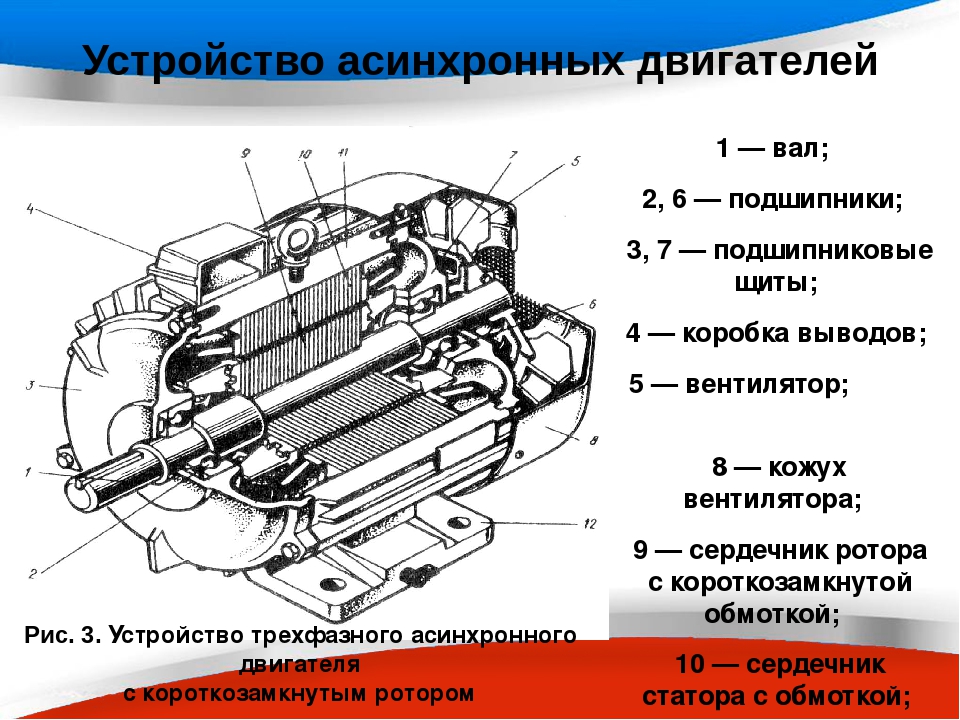
На рисунке: 1 – вал, 2,6 – подшипники, 3,8 – подшипниковые щиты, 4 – лапы, 5 – кожух вентилятора, 7 – крыльчатка вентилятора, 9 – короткозамкнутый ротор, 10 – статор, 11 – коробка выводов.
Основными частями асинхронного двигателя являются статор (10) и ротор (9).
Статор имеет цилиндрическую форму, и собирается из листов стали. В пазах сердечника статора уложены обмотки статора, которые выполнены из обмоточного провода. Оси обмоток сдвинуты в пространстве относительно друг друга на угол 120°. В зависимости от подаваемого напряжения концы обмоток соединяются треугольником или звездой.
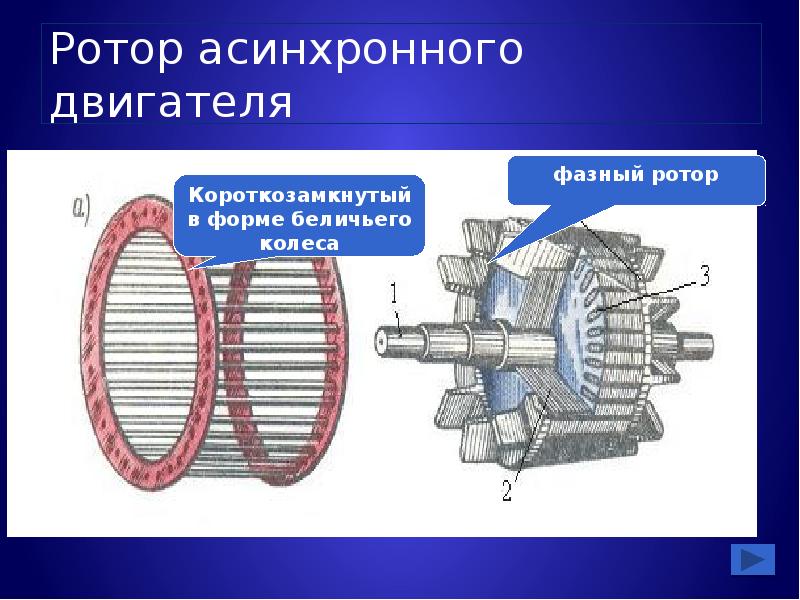
Короткозамкнутый ротор представляет собой сердечник, набранный из листов стали. В пазы этого сердечника заливается расплавленный алюминий, в результате чего образуются стержни, которые замыкаются накоротко торцевыми кольцами. Эта конструкция называется “ беличьей клеткой“. В двигателях большой мощности вместо алюминия может применяться медь. Беличья клетка представляет собой короткозамкнутую обмотку ротора, откуда собственно название.
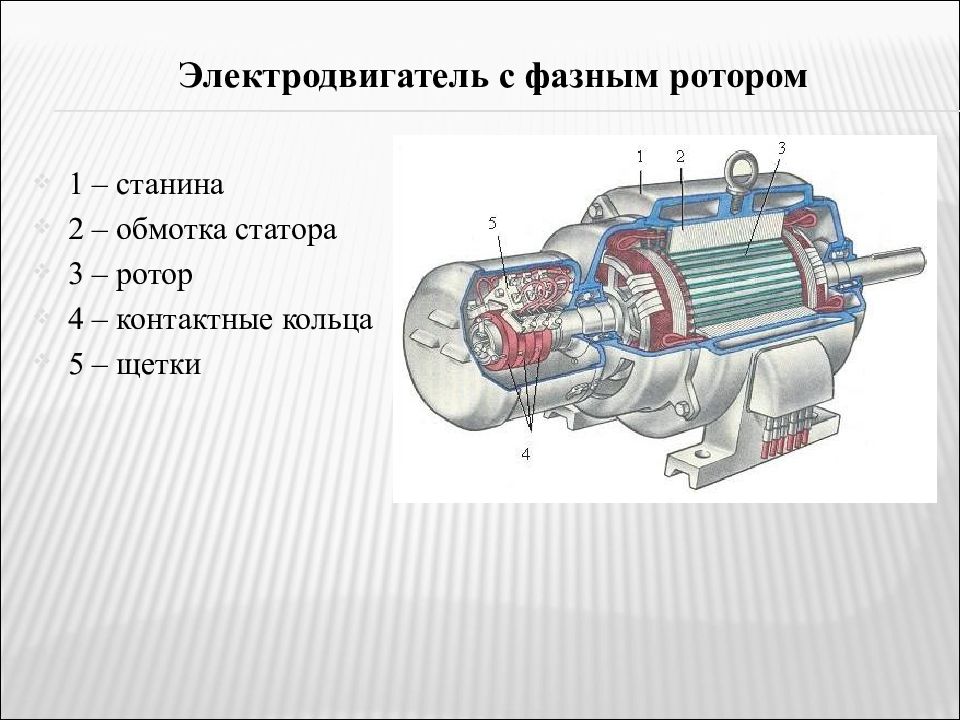
Фазный ротор имеет трёхфазную обмотку, которая практически не отличается от обмотки статора. В большинстве случаев концы обмоток фазного ротора соединяются в звезду, а свободные концы подводятся к контактным кольцам. С помощью щёток, которые подключены к кольцам, в цепь обмотки ротора можно вводить добавочный резистор. Это нужно для того, чтобы можно было изменять активное сопротивление в цепи ротора, потому что это способствует уменьшению больших пусковых токов. Подробнее о фазном роторе можно прочитать в статье – асинхронный двигатель с фазным ротором.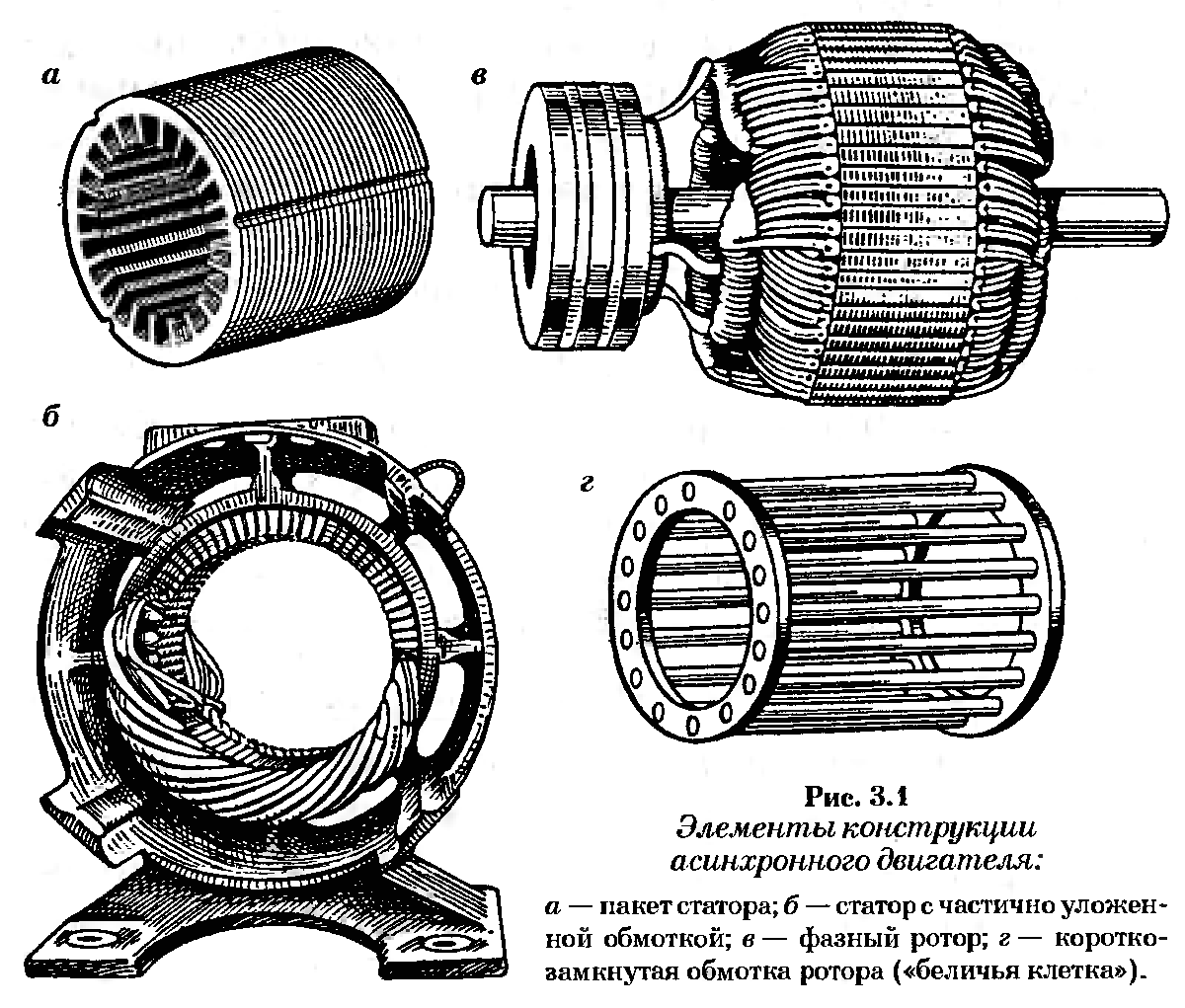
Принцип работы
При подаче к обмотке статора напряжения, в каждой фазе создаётся магнитный поток, который изменяется с частотой подаваемого напряжения. Эти магнитные потоки сдвинуты относительно друг друга на 120°, как во времени, так и в пространстве. Результирующий магнитный поток оказывается при этом вращающимся.
Результирующий магнитный поток статора вращается и тем самым создаёт в проводниках ротора ЭДС. Так как обмотка ротора, имеет замкнутую электрическую цепь, в ней возникает ток, который в свою очередь взаимодействуя с магнитным потоком статора, создаёт пусковой момент двигателя, стремящийся повернуть ротор в направлении вращения магнитного поля статора. Когда он достигает значения, тормозного момента ротора, а затем превышает его, ротор начинает вращаться. При этом возникает так называемое скольжение.
Скольжение s – это величина, которая показывает, насколько синхронная частота n1 магнитного поля статора больше, чем частота вращения ротора n2, в процентном соотношении.
Скольжение это крайне важная величина. В начальный момент времени она равна единице, но по мере возрастания частоты вращения n2
ротора относительная разность частот n1-n2 становится меньше, вследствие чего уменьшаются ЭДС и ток в проводниках ротора, что влечёт за собой уменьшение вращающего момента. В режиме холостого хода, когда двигатель работает без нагрузки на валу, скольжение минимально, но с увеличением статического момента, оно возрастает до величины
Как только наступит равновесие между электромагнитным моментом, вызывающим вращение ротора и тормозным моментом создаваемым нагрузкой на валу двигателя процессы изменения величин прекратятся.
Выходит, что принцип работы асинхронного двигателя заключается во взаимодействии вращающегося магнитного поля статора и токов, которые наводятся этим магнитным полем в роторе. Причём вращающий момент может возникнуть только в том случае, если существует разность частот вращения магнитных полей.
Рекомендуем к прочтению – однофазный асинхронный двигатель.
Асинхронный электродвигатель – устройство, принцип работы, виды асинхронных двигателей
Данный двигатель зачастую используется в промышленности. Он простой в использовании, долговечный, недорогой.
Асинхронный двигатель
Асинхронный двигатель превращает электрическую энергию в механическую. Его работа основана на принципе вращающегося магнитного поля. Сам принцип действия аппарата можно описать несколькими пунктами поэтапно:
- Во время запуска самого двигателя происходит пересечение магнитного поля с контуром ротора, после чего происходит индицирование электродвижущей силы.
- В замкнутом роторе происходит возникновение переменного тока.
- Магнитные поля: статора и ротора также воссоздают непосредственно так называемый крутящий момент.
- Ротор «догоняет» поле самого статора.
- Когда частоты вращения самого магнитного поля статора/ротора имеют совпадения, электромагнитные процессы, образованные в месте ротора затухают. После чего крутящий момент приравнивается к «0».
- Статор, а вернее его образованное магнитное поле возбуждает контур ротора, который в этот момент вновь позади.
Где применяются?
Как уже уточнялось выше в статье, применяется данный двигатель промышленности (лебедки общепромышленного назначения, краны) и бытовой технике (асинхронные двигатели с небольшой мощностью).
Теперь остановим ваше внимание на электродвигателе непосредственно с короткозамкнутым ротором. Они применяются в самих электроприводах различных типов станков, а если говорить точнее: металлообрабатывающих, а также часто встречающихся на сегодня грузоподъемных и ткацких, в том числе деревообрабатывающих), а также в вентиляторах, лифтах, различных насосах, бытовых приборах.
Если говорить об асинхронном электродвигателе с короткозамкнутым ротором, то благодаря его применению можно добиться существенного снижения энергопотребления оборудования, которое в свою очередь, обеспечивает высокий уровень надежности аппарата. Данные характеристики оказывают положительный эффект на модернизацию производства в целом.
Что такое «скольжение»?
Пришло время поговорить о таком понятии как «скольжение» асинхронного двигателя.
Это, по сути, относительная разность скоростей самого вращения «ротора», это ни что иное, как изменение, так называемого переменного магнитного тока. «Скольжение» измеряется в относительных единицах, а также можно измерять в процентном соотношении.
Устройство асинхронного двигателя
Основные части двигателя: статор и ротор. Три обмотки находятся на полюсах железного сердечника кольцевой формы, сети так называемого трехфазного тока 0 располагаются одна относительно другой строго под углом 120 градусов.
Также отметим, что внутри самого сердечника закреплен на той же оси цилиндр из высококачественного металла. Он называется – ротор.
Он называется – ротор.
Из чего состоит асинхронный электродвигатель
Статор
Статор это неподвижная часть, которая формирует вращающееся магнитное поле. Именно это поле непосредственно соприкасается с электромагнитным полем самой подвижной части, именуемой ротором, тем самым происходит полноценное вращение ротора.
Двигатели статора имеют фазные и короткозамкнутые роторы.
Устройство статора
- Первое это корпус, изготовленный из чугуна, но часто встречаются корпуса из алюминия.
- Далее идет сердечник из пластин, которые изготовлены из электротехнической стали в толщину 0,5 миллиметров. Пластины сердечника скреплены скобками или же швами, покрыты изоляционным лаком, закреплены в станине при помощи стопорных болтов.
- Ну и последнее в устройстве статора– обмотки, сдвинутые друг к другу на 120 градусов, как правило, в устройстве их не более трех, они вложены в пазы на внутренней стороне самого сердечника, изготовлены из изолированного медного, алюминиевого провода круглого/квадратного сечения.
Сердечник статора
Выполняется с посадкой на вал, без наличия промежуточной втулки. Посадка сердечников используется в двигателях с высотой непосредственно оси в 250 миллиметров без шпонки.
В больших двигателях сердечники закреплены на вал с применением шпонки. В случае, если ротор в диаметре 990 миллиметров, сердечник шихтуют из разных сегментов.
Обмотка статора и количество оборотов электродвигателя
Определить количество оборотов электродвигателя можно лишь при помощи обмотки. В этом нет ничего сложного и достаточно просто следовать инструкции и все получится. Для этого нужно:
- Снять крышку с двигателя.
- Найти одну из секций и посмотреть, сколько места она занимает по окружности самого круга. Например, если катушка заняла половину круга – это 180 градусов, то двигатель идет на 3000 оборотов в минуту.
- Если в окружности вмещается три секции на 120 градусов, то это двигатель на 1500 оборотов в минуту.
- Если в катушке вмещается 4 секции на 90 градусов, то двигатель на 3000 оборотов в минуту.

Ротор
Вращается внутри самого статора (выше описывали, что он представляет собой). Ротор – элемент электрического двигателя. Его вал соединен с деталями агрегаторов. Если говорить о массивном роторе – это цельный стальной цилиндр, который помещается во внутрь статора с не присоединенным к его поверхности сердечником (также выше описывали что такое сердечник).
Также бывают еще разновидности ротора:
- фазный (уложен в пазы сердечника обмоткой и соединен по схеме «звезда»),
- короткозамкнутый (залитый в поверхность сердечника, замкнут с торцов при помощи двух высокопроводящих медных колец).
Устройство короткозамкнутого ротора
Такая обмотка зачастую называется у профессионалов «беличьим колесом» по причине того, что его внешняя конструкция достаточно схожа с ним. Состоит из аллюминевых стержней, торцов с двумя кольцами замкнутых накоротко. Такие стержни вставлены, как правило, в пазы сердечника самого ротора.
Как сделан фазный ротор
Фазный ротор представляет собой двигатель, который поддается регулировке при помощи добавления в цепь ротора так называемых добавочных сопротивлений.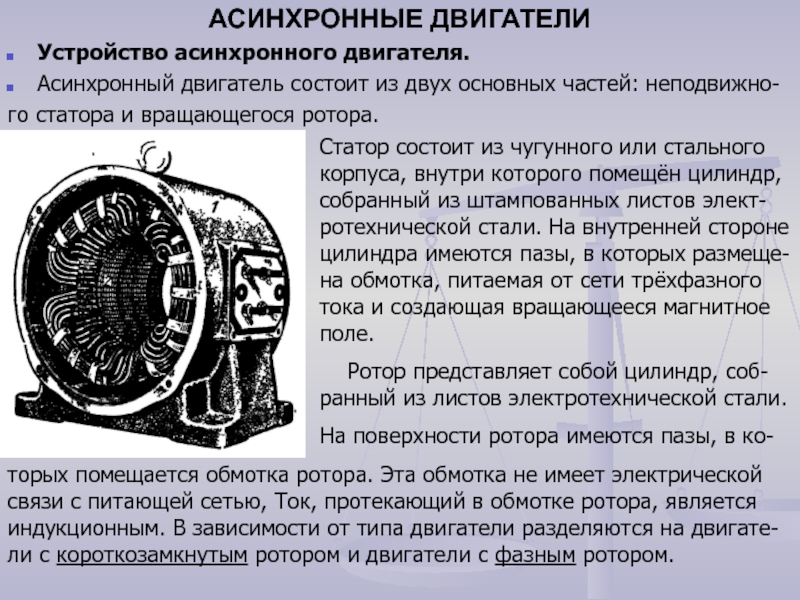 Используются такого плана двигатели во время пуска с нагрузкой на валу. В свою очередь, увеличение сопротивления в цепи ротора предоставляет возможность увеличить пусковой момент.
Используются такого плана двигатели во время пуска с нагрузкой на валу. В свою очередь, увеличение сопротивления в цепи ротора предоставляет возможность увеличить пусковой момент.
Что лучше короткозамкнутый или фазный: совместная работа ротора и статора
Здесь стоит отметить, что особенных преимуществ нет ни у одного ротора, каждый хорош по-своему. Более подробно на них останавливаться не будем, так как вся необходимая информация по этим двум разновидностям ротора уже была дана выше в статье. остановим внимание на том, как регулируется частота вращения ротора. Это можно сделать при помощи изменения так называемого дополнительного сопротивления самой цепи ротора.
Также можно регулировать частоту вращения ротора, изменив напряжение статора, который подведен к обмотке.
Можно также изменить частоту питающего напряжения или же переключить число пар полюсов, ввести резисторы в цепь ротора.
Классификация по типу ротора
Классификация по типу ротора следующая: однофазный асинхронный двигатель с короткозамкнутым ротором, а также есть такая разновидность ротора, как двухфазный асинхронный двигатель короткозамкнутый.
Плюс ко всему сегодня часто пользуется спросом и асинхронный двигатель с короткозамкнутым ротором с тремя фазами, а также асинхронный двигатель с фазным ротором, также с тремя фазами. Именно так и делится классификация ротора по числу фаз.
Линейные моторы
В линейных двигателях перемещение рабочего органа РО (коротких подач) происходит от самого двигателя через ременную передачу строго на винт (ходовой).
Шариковая гайка скреплена с короткой передачей пружинных механизмов защиты от соударений, именно через нее происходит вращение винта и происходит трансформация в продольное перемещение РО.
Подключение двигателя к питанию
Кнопки “Стоп” должны быть подключены в последовательности друг с другом, а в свою очередь кнопки “Пуск” должны строго настрого быть подключены в параллели между собой в цепи управления.
Во время нажатия на “Пуск” цепь катушки будет замкнута, а сама катушка начинает втягиваться, а во время размыкания кнопки, напряжение питающее катушку, пойдет через блок-контакт КМ. Прервать цепь управления можно при помощи нажатия на одну из кнопок “Стоп”.
Прервать цепь управления можно при помощи нажатия на одну из кнопок “Стоп”.
Достоинства и недостатки асинхронных двигателей
Какие недостатки и достоинства у асинхронных электродвигателей
Достоинства:
- прежде всего, их легко использовать и никаких сложностей при эксплуатации не возникает
- конструкция двигателей очень простая и это еще одно их преимущество, а также нельзя не отметить их низкую себестоимость (порой это имеет большое значение для покупателей, так что это еще один плюс таких двигателей)
- надежность
Недостатки:
- модели оснащены маленьким пусковым механизмом
- выдают высокой спусковой ток
- очень сильно чувствительны к возможной смене параметров в сети
- для плавного регулирования скорости нужен преобразователь вероятных частот
Несмотря на то, что есть свои недостатки эти асинхронные двигатели, пользуются огромной популярностью. Так что все-таки они заслуживают должного уважения и не зря их часто используют в промышленности.
Заключение
Надеемся, теперь вам полностью понятен принцип работы асинхронного двигателя. Если хотите регулярно узнавать новую информацию по этой теме, а также по теме металлоискателей, подписывайтесь на нашу группу в социальной сети «Вконтакте». Для этого вам необходимо будет перейти по следующей ссылке https://vk.com/electroinfonet. Там можно не только узнавать различного рода полезную информацию, но еще и задавать вопросы и получать на них подробные ответы.
СледующаяЭлектрические машиныМалоизвестные факты о двигателях постоянного тока
определение, устройство и принцип работы, использование и подключение
Асинхронный двигатель (определение) – это вид машин, используемый для превращения электроэнергии в механическую силу. А слово “асинхрон” указывает на то, что действия происходят не одновременно. При этом предполагается, что у подобных моторов скорость хода электромагнитного поля статора изначально выше, чем у ротора. Работает машина от сети с переменным током.
При этом предполагается, что у подобных моторов скорость хода электромагнитного поля статора изначально выше, чем у ротора. Работает машина от сети с переменным током.
Как устроен асинхронный двигатель
Первая главная деталь в электромоторе называется статором, вторая – ротором. Статор сделан в форме цилиндра из крепкого листа нержавеющей стали. Внутри сердечника статора установлены обмотки из специальных проводов. Оси проводов укладываются под углом в 120°. Для работы на разных электросетях концы кабелей скрепляются в виде треугольника или звезды.
Роторы в асинхронном двигателе подразделяются на 2 типа:
- Короткозамкнутый. Он является сердечником, в который заливается раскаленный металл. После этого в нем появляются железные стержни, замыкающиеся маленькими торцевыми колечками. Подобная схема конструкции именуется “беличьей клеткой”. В устройствах с высокой мощностью алюминий заменяется на медь.
- С фазами. Мотор имеет толстую трехфазную обмотку, которая почти не отличается от обмотки статора. В основном концы проводов скрепляются в форме звезды, а затем дополнительно закрепляются колечками. Используя щетку, которая подсоединена к обручам, к цепи можно подключить дополнительный резистор. Последний необходим для того, чтобы человек мог контролировать переменное сопротивление в фазе ротора.
Принцип работы устройства
Частями асинхронного двигателя являются статор и ротор.Если начать подавать электрический ток на кабели статора, то двигатель начнет работать. Внутри машины начинается индукция, то есть в двигателе индуцируется мощное электромагнитное поле. Например, в технике с постоянным электрическим током необходимо создавать электромагнитное поле в якоре с помощью щеток.
По закону Фарадея, в устройстве, которое обладает короткозамкнутой обмоткой, проходит наведенный электроток, потому что цепочка замыкается по методу короткого замыкания. Данный ток, как и напряжение в статоре, приводит к появлению магнитного поля. Ротор устройства становится магнитом в статоре, обладающим вращающимся электромагнитным полем.
Ротор устройства становится магнитом в статоре, обладающим вращающимся электромагнитным полем.
Статор не двигается, и поле перемещается внутри машины с нормальной скоростью, а в роторе индуцируется электроток, что делает из него мощный магнит. Благодаря этому подвижный ротор начинает двигаться благодаря полю статора. Почему происходит асинхронное вращение, можно понять, зная, что в момент объединения магнитные поля пытаются компенсировать недостатки друг друга.
Процесс скольжения может проходить не только с небольшим опозданием, но и с опережением. В первом случае мотор превращает электроэнергию в механическую (например, станок начинает двигаться). А во втором происходит генераторная работа, то есть движение деталей устройства вырабатывает электричество.
Созданный момент кручения полностью зависит от мощности постоянного напряжения для подпитки статора. Постоянно меняя частоту электрического тока и силу напряжения, человек может контролировать момент вращения, что и позволяет влиять на режим работы двигателя.
Данная идея работает как на простых однофазных моторах, так и на трехфазных двигателях.
Виды асинхронных двигателей
С короткозамкнутым ротором
Есть 2 типа АДКР (двигателей с коротким замкнутым ротором):
- с ротором в виде клеток для белок;
- со специальными ободками.
С фазным ротором
Однофазный асинхронный двигатель подразделяется на следующие виды:
- с нескрепленными проводами;
- с запускающей деталью;
- с запускающим и функционирующим конденсаторами;
- с измененным расположением полюса.
Назначение и сфера применения АД
Без асинхронного двигателя не обходится большинство предприятий.Электродвигатели, которые называются асинхронными, применяются почти во всех отраслях промышленности и сельского хозяйства. Они тратят около 70% электричества, которое предназначено для превращения мощности тока в поступательное движение. Работа асинхронного двигателя считается наиболее эффективной в качестве электрической тяги. Без подобных машин не обходится большинство предприятий.
Без подобных машин не обходится большинство предприятий.
У данных устройств есть несколько положительных сторон:
- Простая и недорогая конструкция, поэтому производство машин не отнимает много времени и средств.
- Низкие расходы по эксплуатации обеспечены отказом от скользящего узелка токосъема, что и повышает надежность мотора.
- Доступность. Они продаются почти во всех магазинах по невысокой цене.
Данный вид машин бывает трехфазным или однофазным в зависимости от числа питающих частей. Если соблюдать правила техники безопасности и настроить электросеть, то трехфазный мотор может работать на однофазной сети.
Асинхронные устройства используются не только на производстве, но и в быту. Однофазные двигатели устанавливаются в вентиляторы, стиральные машины, насосы для воды и небольшие электрические инструменты.
Схемы подключения
Провода трехфазного двигателя подключаются либо по схеме треугольника, либо по звезде.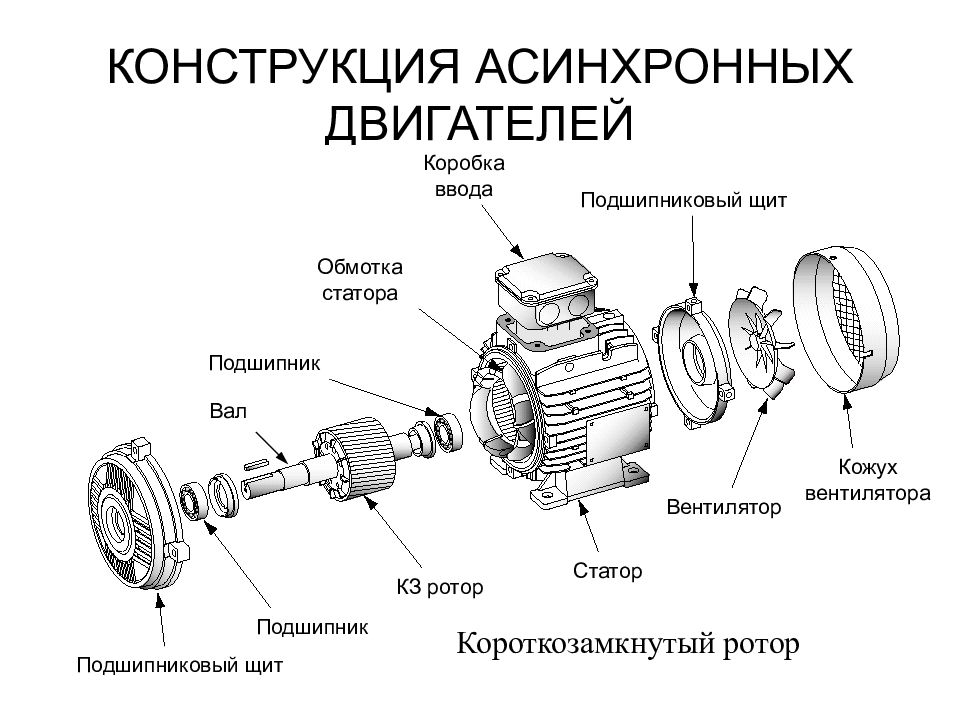 При этом для последнего напряжение должно быть выше. Также перед установкой обмотки нужно определить момент на валу в моторе. Стоит обратить внимание на тот момент, что АДКР, подсоединенный различными методами к одной и той же цепи, требует разной мощности. Поэтому нельзя подключать двигатель, в котором предполагается использование только схемы треугольника, с принципом треугольника.
При этом для последнего напряжение должно быть выше. Также перед установкой обмотки нужно определить момент на валу в моторе. Стоит обратить внимание на тот момент, что АДКР, подсоединенный различными методами к одной и той же цепи, требует разной мощности. Поэтому нельзя подключать двигатель, в котором предполагается использование только схемы треугольника, с принципом треугольника.
Иногда с целью снижения пускового тока люди коммутируют на этапе пуска контакты звезды в треугольник, но в таком случае падает и пусковой момент.
А для подсоединения трехфазного мотора к однофазной электросети профессионалы применяют разные фазосдвигающие детали, например конденсатор и резистор.
Самые эффективные асинхронные двигатели — DRIVE2
Приветствую Вас, друзья!
Расскажу Вам сегодня об одной из самых интересных и перспективных отечественных разработок (проектов или как нонче модно говорить – стартапов). Моё знакомство с данной разработкой началось полгода назад, и я долго не решался поделиться с Вами информацией, т.к. прежде надо было самому во всём разобраться, проконсультироваться со специалистами, поездить на встречи с авторами и партнерами проекта … Думаю, теперь точно настало время.
Моё знакомство с данной разработкой началось полгода назад, и я долго не решался поделиться с Вами информацией, т.к. прежде надо было самому во всём разобраться, проконсультироваться со специалистами, поездить на встречи с авторами и партнерами проекта … Думаю, теперь точно настало время.
Эти разработки касаются далеко не только будущего авто-мото-вело-фото, но и любой техники, работа которой связана с применением электродвигателей. Стоит только посмотреть вокруг и приглядеться даже к привычным нам бытовым приборам: стиральным машинкам, холодильникам, микроволновкам, кондиционерам, электроинструменту, электробритвам … даже мобильным телефонам, список устройств, использующих в своем составе электродвигатели, бесконечен.
Полный размер
Что же сотворили наши соотечественники в этой сфере, что позволит вывести отрасль на новый уровень?
Инженерно-конструкторское предприятие «АС и ПП» во главе с идейным вдохновителем Дмитрием Александровичем Дуюновым существует достаточно давно.
 И начиналась история предприятия с работы над многофункциональным плазменным аппаратом «Горынычъ», расширяясь и наполняясь новыми изобретениями.
И начиналась история предприятия с работы над многофункциональным плазменным аппаратом «Горынычъ», расширяясь и наполняясь новыми изобретениями.Полный размер
Но основная речь сегодня о технологии совмещенных обмоток асинхронных электродвигателей, разработка которой началась в 1995 году.
Кратко смысл технологии в следующем.
До сих пор в мире используются 2 схемы (формы) соединения фазных обмоток статора асинхронного двигателя – так называемые «треугольник» и «звезда».
При подключении обмоток по схеме «звезда» их концы соединяются в одной точке в нулевом узле. Поэтому получается еще один дополнительный нулевой вывод. Другие концы обмоток соединяются с фазами сети 380 В.
Соединение «треугольником» заключается в последовательном соединении обмоток. Конец первой обмотки соединяется с началом второй обмотки и так далее. В конечном итоге, конец третьей обмотки, соединится с началом первой обмотки. Подача трехфазного напряжения осуществляется в каждый узел соединения.
 Подключение по схеме «треугольник» отличается отсутствием нулевого провода.
Подключение по схеме «треугольник» отличается отсутствием нулевого провода.Подключение обмоток статора «звездой» гарантирует плавный, безопасный пуск агрегата, но на начальном этапе наблюдается значительная потеря мощности (крутящего момента).
Подключение «треугольником» дает в 3 раза большую выходную мощность (до 70% от номинальной), но в этом случае существенно возрастают пусковые токи, что может спровоцировать поломку электродвигателя и резкое снижение напряжения питающей сети.
Поэтому часто используют комбинированное соединение «звезда/треугольник», когда в момент пуска обмотки подключены «звездой», а затем в автоматическом режиме с помощью реле времени происходит переключение на схему «треугольник». Однако при этом существенно снижается стартовый момент вращения, а в момент переключения с одной схемы на другую возникают сильные скачки тока, которые приводят к тому, что скорость вращения ротора резко снижается и только со временем постепенно входит в норму. Кроме того, в числе проблем большинства стандартных асинхронных электродвигателей — сильная вибрация, высокое потребление электроэнергии, сильный нагрев, высокий уровень шума.

Применительно же к мотор-колесам и новым промышленным энергоэффективным моторам, в том числе и в связи с программами по энергоэффективности (EEffG), требуется применение в них постоянных магнитов (двигатели BLDC). Для изготовления эффективных постоянных магнитов используются редкоземельные металлы. Спрос на них постоянно растет и к 2020 г. ожидается его удвоение. При этом 95 % редкоземельных металлов добывается в Китае, к тому же темпы добычи снижаются в связи с сильным загрязнением окружающей среды от такой добычи (закрываются целые месторождения). Образовалась огромная экономическая зависимость производителей электромоторов всего Мира от Китая и сильное ценовое давление.
Разработка российских специалистов — обмотка “Славянка” — помогает справиться со всеми перечисленными проблемами.
Суть технологии совмещенных обмоток (Славянка) — использование дополнительных обмоток статора. Реализован простой и гениальный принцип комбинированного или совместного воздействия. Используются два набора взаимозависимых совмещенных обмоток, один из которых собран в «звезду», второй в «треугольник».
Упрощённо схема «Славянка»
Т.е. в отличие от стандартного трёхфазного электродвигателя помимо трёх основных обмоток используются ещё три дополнительных — совмещенных — расположенных определенным геометрическим образом и также специальным образом соединенных между собой. Теоретически это 6-фазный электродвигатель, подключенный к трёхфазной сети. Данная технология запатентована и имеет множество вариаций исполнения конечного продукта.
Преимущества технологии
Благодаря совмещённым обмоткам параметры двигателей значительно улучшаются, в частности повышается энергоэффективность. При этом уменьшается применение дорогостоящих электротехнических материалов. Уменьшение потерь в стали позволяет уменьшить размер двигателя с повышением его эффективности.
Полный размер
Полный размер
Дуюнов, благодаря применению «Славянки» и отсутствию в её структуре магнитов, решил проблему износа обычных асинхронных двигателей, происходящую из-за трения проводов при вибрациях, возникающих за счет увеличения электро-магнитной силы.
 Кроме того, в качестве эксперимента была успешно протестирована технология покрытия провода обмотки — серебром, что позволило снизить показатели электропотребления и нагрева двигателя. Основным источником обмотки, по-прежнему, служит обычный медный провод, используемый повсеместно в производстве электромоторов.
Кроме того, в качестве эксперимента была успешно протестирована технология покрытия провода обмотки — серебром, что позволило снизить показатели электропотребления и нагрева двигателя. Основным источником обмотки, по-прежнему, служит обычный медный провод, используемый повсеместно в производстве электромоторов.Запатентовав свои изобретения, Дмитрий Александрович ставит цель — наладить промышленное производство как мотор-колес, так и передовых асинхронных двигателей, область реализации которых практически не имеет границ, а конечные товары будут доступны каждому потребителю.
Сейчас разработано более 200 различных схем для разных габаритов электродвигателей. Применение модифицированных асинхронных двигателей позволяет уже сейчас выходить на рынки сбыта в различных сферах их применения.
Проследим кратко этапы развития технологии.
Полный размер
Полный размер
К Вашему вниманию несколько интересных коротких роликов:
Ролик на телеканале Россия 24
Ролик на телеканале Автовести
Ролик о том, насколько “Славянка” отличается от классической обмотки
Ролик на телеканале НТВ
Модернизированный по технологии Дуюнова скутер тянет Ниву
Известный актер, музыкант, журналист, мастер спорта России международного класса по автоспорту, а также президент компании Marussia Motors, которая, в свое время, занималась разработкой гоночных болидов отечественного производства, неспроста стал гостем Дуюнова.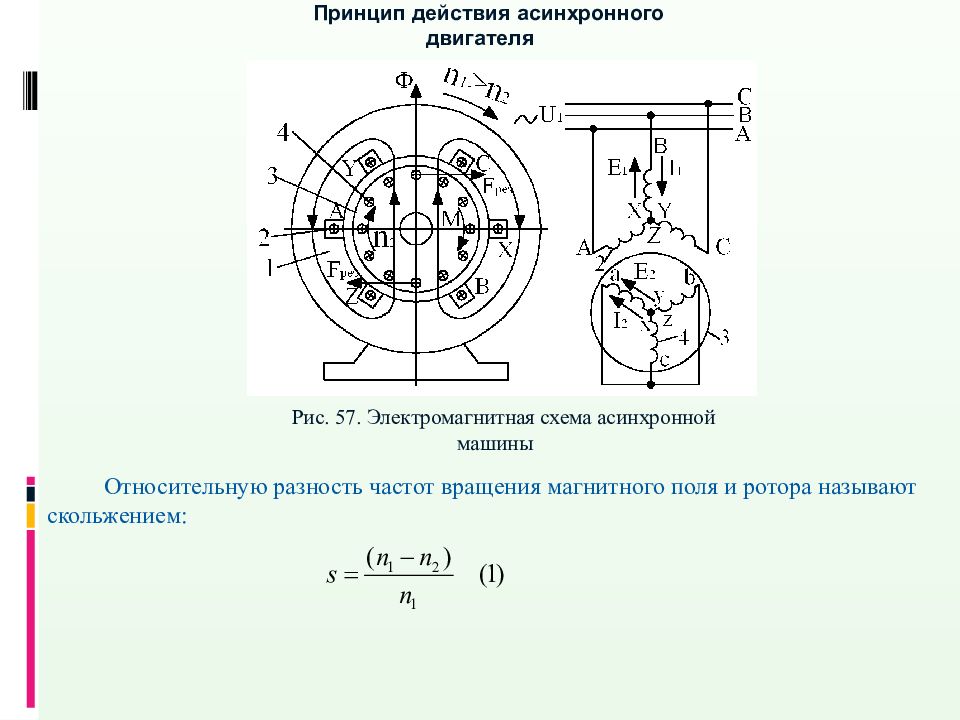
Николай рассказал, что в планах у Marussia Motors создать на базе спорткара компании электромобиль с мотор-колесом. А компанию Дуюнова Фо
Асинхронный двигатель: устройство, виды, принцип работы
Немало техники — бытовой, строительной, производственной имеют двигатели. Если задаться целью и проверить тип мотора, в 90% окажется, что стоит асинхронный двигатель. Это обусловлено простотой конструкции, высоким КПД, отсутствием электрического контакта с движущейся частью (в моделях с короткозамкнутым ротором). В общем, причин достаточно.
Содержание статьи
Что такое асинхронный двигатель и принцип его действия
Любой электродвигатель — устройство для преобразования электрической энергии в механическую. Электрический двигатель состоит из неподвижной (статор) и подвижной части (ротор). Строение статора таково, что он имеет вид полого цилиндра, внутри которого имеется обмотка. В это цилиндрическое отверстие вставляется подвижная часть — ротор. Он также имеет вид цилиндра, но меньшего размера.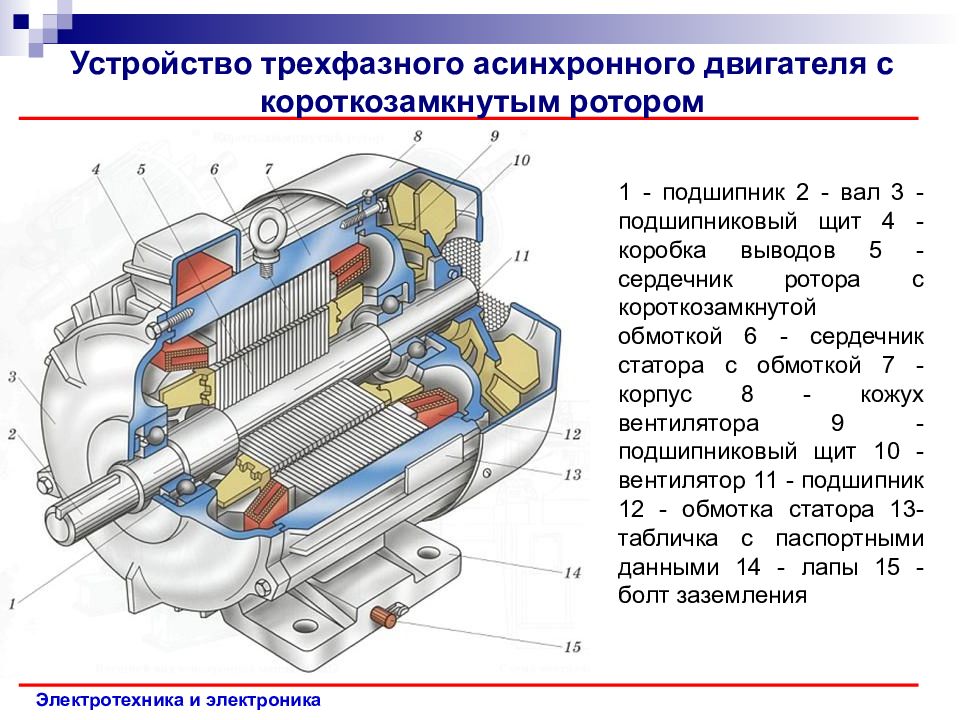 Между статором и ротором имеется воздушный зазор, позволяющий ротору свободно вращаться. Ротор вращается из-за наводимых магнитным полем статора токов. По способу вращения двигатели делят на синхронные и асинхронные.
Между статором и ротором имеется воздушный зазор, позволяющий ротору свободно вращаться. Ротор вращается из-за наводимых магнитным полем статора токов. По способу вращения двигатели делят на синхронные и асинхронные.
Так выглядит разобранный асинхронный двигатель с короткозамкнутым ротором
Асинхронный электродвигатель отличается тем, что частота вращения ротора и магнитного поля, создаваемого статором, у него неравны. То есть, ротор вращается несинхронно с полем, что и дало название этому типу машин. Характерно, в рабочем режиме скорость его вращения меньше. Второе название этого типа двигателей — индукционные. Это название связано с тем, что движение происходит за счёт наводимых на нём токов индукции.
Асинхронный двигатель в разобранном виде: основные узлы и части
Коротко описать принцип работы асинхронного двигателя можно так. При включении мотора на обмотки статора подаётся ток, из-за чего возникает переменное магнитное поле. В область действия силовых линий этого попадает ротор, который начинает вращаться вслед за переменным полем статора.
Статор
Статор асинхронного двигателя состоит из трёх частей: корпуса, сердечника и обмотки. Корпус статора служит в качестве опоры для электродвигателя. Изготавливают его из стали или чугуна, сваркой или литьём. К прочности корпуса предъявляются высокие требования, так как при работе возникают вибрации в результате которых может сместиться ротор, что приведёт к заклиниванию мотора и выходу его из строя.
Статор асинхронного двигателя
Есть и ещё одно требование — геометрия корпуса должна быть идеальной. Между обмоткой статора и ротором зазор делают в несколько миллиметров, так что малейшие отклонения могут быть критичны.
Сердечник статора
Сердечник статора асинхронного электродвигателя изготавливают из наборных металлических пластин. Так как сердечник является магнитопроводом, металл используется магнитная электротехническая сталь.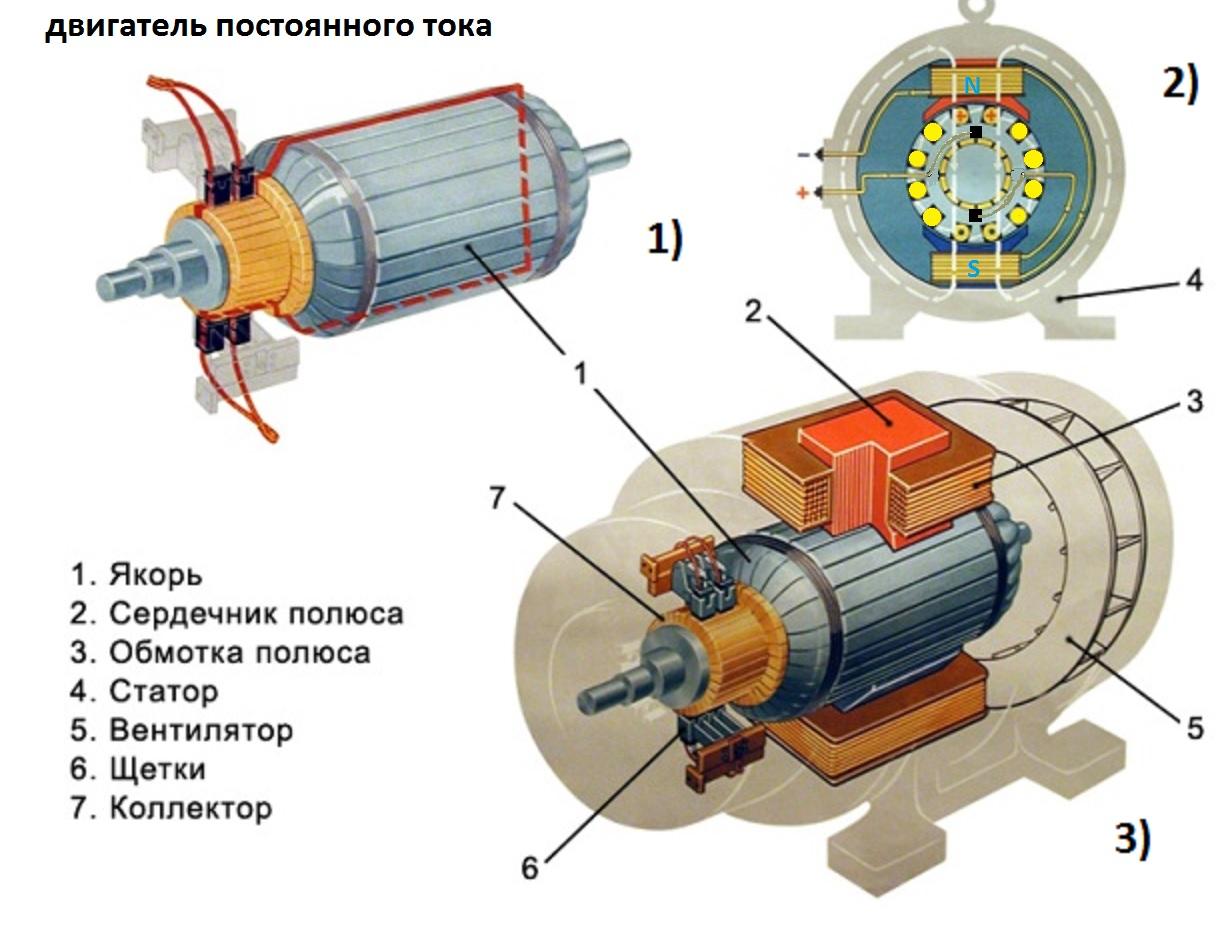 Для уменьшения потерь из-за вихревых потоков сердечник набирается из пластин, покрытых слоем диэлектрика (лак).
Для уменьшения потерь из-за вихревых потоков сердечник набирается из пластин, покрытых слоем диэлектрика (лак).
Сердечник статора набирается из тонких металлических изолированных пластин
Толщина одной пластины — 0,35-0,5 мм. Они собираются в единый пакет, так чтобы пазы всех пластин совпадали. В эти пазы затем укладываются витки обмотки.
Обмотка статора и количество оборотов электродвигателя
Статор асинхронного электромотора чаще всего имеет трёхфазную обмотку возбуждения. Она называется так, потому что является причиной движения ротора. Обмотка статора состоит из катушек, навитых из медной проволоки которые укладываются в пазы сердечника. Каждая обмотка может состоять из нескольких витков проволоки или из одного витка. Провод используется специальный, с лаковым покрытием, которое изолирует витки друг от друга и от стенок сердечника.
Как уже говорили, чаще всего обмотка статора асинхронного двигателя имеет три фазы. В этом случае оси катушек расположены со сдвигом 120°. При таком строении магнитное поле имеет два полюса и делает один полный оборот за один цикл трёхфазного питания. При частоте в электросети равной 50 Гц, скорость вращения поля (и ротора) 50 об/сек или 3000 об/мин.
При таком строении магнитное поле имеет два полюса и делает один полный оборот за один цикл трёхфазного питания. При частоте в электросети равной 50 Гц, скорость вращения поля (и ротора) 50 об/сек или 3000 об/мин.
Укладка катушек обмотки статора асинхронного двигателя
Для уменьшения скорости вращения ротора в асинхронном двигателе обмотку делают с большим количеством полюсов. Так с четырехполюсным стартером скорость вращения будет вдвое меньше — 1500 об/мин. Обмотка с шестью полюсами статора даёт втрое меньшую скорость — 1000 об/мин. С восемью полюсами — в четыре раза меньше, т. е. 750 об/мин. Ещё более «медленные» электромоторы делают очень редко.
Концы обмоток статора выводятся на клеммную коробку корпуса. Тут они могут соединяться по принципу «звезда» или «треугольник» в зависимости от типа подаваемого питания (220 В или 380 В).
Ротор
Ротор асинхронного электродвигателя бывает двух видов: короткозамкнутым и фазным. Чаще всего встречаются машины с короткозамкнутым ротором. Их преимущество в простоте конструкция и несложной технологии изготовления. Что еще важно, в таких моторах отсутствует контакт с динамической конструкцией. Это повышает долговечность, делает обслуживание более редким и простым.
Их преимущество в простоте конструкция и несложной технологии изготовления. Что еще важно, в таких моторах отсутствует контакт с динамической конструкцией. Это повышает долговечность, делает обслуживание более редким и простым.
Асинхронный двигатель может быть с короткозамкнутым и фазным
Асинхронные электромоторы с фазным ротором имеют более сложную конструкцию. Но они позволяют плавно регулировать скорость без дополнительных устройств, со старта имеют высокий крутящий момент. Так что приходится выбирать: более простая конструкция или возможность регулировки скорости вращения.
Устройство короткозамкнутого ротора
Ротор состоит из вала и цилиндрической конструкции из короткозамкнутых стержней. Внешне эта конструкция очень напоминает беличье колесо, поэтому так часто называют короткозамкнутую обмотку ротора.
Устройство короткозамкнутого ротора
Изначально и стержни, и замыкающие кольца изготавливались из меди. Роторы современных асинхронных двигателей мощностью до 100 кВт делают из алюминиевых стержней, с алюминиевыми же замыкающими дисками. Расстояние между стержнями заливается снова-таки алюминиевым сплавом. Получается короткозамкнутый ротор, но уже со сплошным покрытием.
Расстояние между стержнями заливается снова-таки алюминиевым сплавом. Получается короткозамкнутый ротор, но уже со сплошным покрытием.
Так как при работе выделяется значительное количество тепла, для охлаждения перемычки «беличьего колеса» делают с дополнительными вентиляционными лопатками. Так во время работы происходит самоохлаждение. Оно работает тем эффективнее, чем выше скорость вращения.
Как устроен асинхронный двигатель: устройство и компоновка деталей
Ротор устанавливается в статор, концы вала фиксируются при помощи крышек с вмонтированными подшипниками. Это двигатель без щеток (безщеточный). Никаких дополнительных контактов и электрических соединений. Подвижная часть мотора начинает вращаться при наличии магнитного поля на статоре. Оно возникает после подачи питания. Это поле вращается, заставляя вращаться и предметы, которые находятся в его поле. Простая и надёжная конструкция, которая обусловила популярность электрических двигателей этого типа.
Как сделан фазный ротор
Устройство фазного ротора мало чем отличается от обмотки статора. Те же наборные кольца с пазами под укладку медных катушек. Количество обмоток ротора три, соединены они обычно «звездой».
Те же наборные кольца с пазами под укладку медных катушек. Количество обмоток ротора три, соединены они обычно «звездой».
Так выглядит фазный ротор асинхронного двигателя
Концы роторных обмоток крепят к контактным кольцам из меди. Эти кольца жёстко закреплены на валу. Кроме того, они обязательно изолированы между собой, не имеют электрического контакта со стальным валом (крепятся к стержню через диэлектрические прокладки). Так как наличие колец отличительная черта этого типа движков, иногда их называют кольцевыми.
Асинхронный двигатель с фазным ротором
Для фиксации ротора к корпусу статора делают две крышки с подшипниками. На одной из крышек закрепляются щетки, которые прижимаются к кольцам на валу, за счёт чего имеют с ними хороший контакт. Для регулировки скорости вращения щетки соединены с реостатом. Изменяя его сопротивление, меняем напряжение, а с ним и скорость вращения.
Что лучше короткозамкнутый или фазный?
Несмотря на то что двигатели с фазовым ротором лучше стартуют, позволяют в процессе работы плавно менять скорость при помощи обычного реостата, чаще применяется моторы короткозамкнутого типа.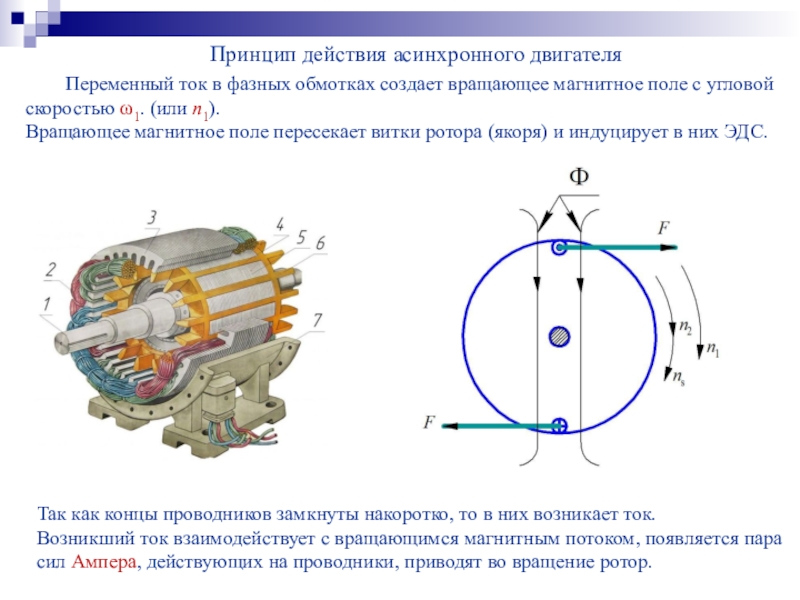 В этой конструкции отсутствуют щетки, которые выходят из строя первыми. Кроме того, более простое устройство подвижной части снижает стоимость двигателя, агрегат служит дольше, уход и техобслуживание проще.
В этой конструкции отсутствуют щетки, которые выходят из строя первыми. Кроме того, более простое устройство подвижной части снижает стоимость двигателя, агрегат служит дольше, уход и техобслуживание проще.
Какой лучше: короткозамкнутый ротор или фазный
Тем не менее стоит более подробно ознакомиться с достоинствами и недостатками обоих типов асинхронных двигателей. Итак, достоинства короткозамкнутого асинхронного двигателя:
- Простая конструкция.
- Лёгкое обслуживание.
- Более высокий КПД.
- Нет искрообразования.
Недостатки:
Из-за высокого пускового тока прямое включение допускается для двигателей мощностью до 200 кВт. Более мощные требуют пускорегулирующей аппаратуры. Обычно используют частотный преобразователь, который плавно увеличивает ток, обеспечивая плавный старт без перегрузок.
Преимущество асинхронного фазного двигателя:
- Быстрый и беспроблемный старт.
- Позволяет менять скорость в процессе работы.

- Прямое подключение возможно, практически без ограничения мощности.
Недостатки тоже есть: наличие щёток, возможность искрения, сложное и частое обслуживание.
Как регулируется частота вращения
Как уже писали, частота вращения ротора зависит от количества полюсов статора. Чем больше количество полюсов, тем меньше скорость. Но это не только так можно регулировать скорость вращения. Она еще зависит от напряжения и частоты питания.
Способы регулирования частоты асинхронного двигателя
Напряжение можно регулировать, установив потенциометр на входе. Частоту регулируют поставив частотный преобразователь. Частотник — более выгодное решение, так как он ещё и снижает стартовые токи и может быть программируемым.
Однофазный асинхронный двигатель
Выше рассматривался трехфазный асинхронный двигатель, в однофазном асинхронном двигателе их две. Одна рабочая, вторая вспомогательная. Вспомогательная нужна для того, чтобы придать первоначальное вращение ротору. Потому может называться ещё пусковой или стартовой.
Потому может называться ещё пусковой или стартовой.
Однофазный асинхронный двигатель имеет две обмотки: рабочую и вспомогательную (стартовую или пусковую)
Когда в статоре включена одна обмотка, она создаёт два равных магнитных поля, вращающихся в разные стороны. Если ввести в это поле ротор, который уже имеет какое-то начальное вращение, магнитное поле будет поддерживать это вращение. Но как запустить ротор на старте? Как придать ему вращение, ведь от одной обмотки возникают два равноценных магнитных поля, направленные в разные стороны. Так что с их помощью заставить вращаться ротор невозможно. В простейшем варианте вращение задаётся вручную — механически. Затем вращение подхватывает поле.
Чтобы автоматизировать запуск однофазного асинхронного двигателя и сделана вспомогательная обмотка. Она сконструирована так, что подавляет одну из составляющих магнитного поля основной обмотки и усиливает вторую. Соответственно, одна из составляющих перевешивает, задавая вращение ротора. Затем стартовая обмотка отключается, вращение поддерживает основная.
Асинхронный электродвигатель с короткозамкнутым и фазным ротором: устройство и принцип действия
Наука в области электричества в XIX и XX веках стремительно развивалась, что привело к созданию электрических асинхронных двигателей. С помощью таких устройств развитие промышленной индустрии шагнуло далеко вперед и теперь невозможно представить заводы и фабрики без силовых машин с использованием асинхронных электродвигателей.
История появления
История создания асинхронного электродвигателя начинается в 1888 году, когда Никола Тесла запатентовал схему электродвигателя, в этом же году другой ученый в области электротехники Галлилео Феррарис опубликовал статью о теоретических аспектах работы асинхронной машины.
В 1889 году российский физик Михаил Осипович Доливо-Добровольский получил в Германии патент на асинхронный трехфазный электрический двигатель.
Все эти изобретения позволили усовершенствовать электрические машины и привели к тому, что в промышленность стали массово применяться электрические машины, которые значительно ускорили все технологические процессы на производстве, повысили эффективность работы и снизили её трудоемкость.
В настоящий момент самый распространенный электродвигатель, эксплуатируемый в промышленности, является прототипом электрической машины, созданной Доливо-Добровольским.
Устройство и принцип действия асинхронного двигателя
Главными компонентами асинхронного электродвигателя являются статор и ротор, которые отделены друг от друга воздушным зазором. Активную работу в двигателе выполняют обмотки и сердечник ротора.
Под асинхронностью двигателя понимают отличие частоты вращения ротора от частоты вращения электромагнитного поля.
Статор – это неподвижная часть двигателя, сердечник которой выполняется из электротехнической стали и монтируется в станину. Станина выполняется литым способом из материала, который не магнитится (чугун, алюминий). Обмотки статора являются трехфазной системой, в которой провода уложены в пазы с углом отклонения 120 градусов. Фазы обмоток стандартно подключают к сети по схемам «звезда» или «треугольник».
Ротор – это подвижная часть двигателя. Роторы асинхронных электродвигателей бывают двух видов: с короткозамкнутым и фазным роторами. Данные виды отличаются между собой конструкциями обмотки ротора.
Асинхронный двигатель с короткозамкнутым ротором
Такой тип электрической машины был впервые запатентован М.О. Доливо-Добровольским и в народе называется «беличье колесо» из-за внешнего вида конструкции. Короткозамкнутая обмотка ротора состоит из накоротко замкнутых с помощью колец стержней из меди (алюминия, латуни) и вставленные в пазы обмотки сердечника ротора. Такой тип ротора не имеет подвижных контактов, поэтому такие двигатели очень надежны и долговечны при эксплуатации.
Асинхронный двигатель с фазным ротором
Такое устройство позволяет регулировать скорость работы в широком диапазоне. Фазный ротор представляет собой трехфазную обмотку, которая соединяется по схемам «звезда» или треугольник. В таких электродвигателях в конструкции имеются специальные щетки, с помощью которых можно регулировать скорость движения ротора. Если в механизм такого двигателя добавить специальный реостат, то при пуске двигателя уменьшится активное сопротивление и тем самым уменьшатся пусковые токи, которые пагубно влияют на электрическую сеть и само устройство.
Принцип действия
При подаче электрического тока на обмотки статора возникает магнитный поток. Так как фазы смещены относительно друг друга на 120 градусов, то из-за этого поток в обмотках вращается. Если ротор короткозамкнутый, то при таком вращении в роторе появляется ток, который создает электромагнитное поле. Взаимодействуя друг с другом, магнитные поля ротора и статора заставляют ротор электродвигателя вращаться. В случае, если ротор фазный, то напряжение подается на статор и ротор одновременно, в каждом механизме появляется магнитное поле, они взаимодействуют друг с другом и вращают ротор.
Достоинства асинхронных электродвигателей
| С короткозамкнутым ротором | С фазным ротором |
|---|---|
| 1. Простое устройство и схема запуска | 1. Небольшой пусковой ток |
| 2. Низкая цена изготовления | 2. Возможность регулировать скорость вращения |
| 3. С увеличением нагрузки скорость вала не меняется | 3. Работа с небольшими перегрузками без изменения частоты вращения |
| 4. Способен переносить перегрузки краткие по времени | 4. Можно применять автоматический пуск |
| 5. Надежен и долговечен в эксплуатации | 5. Имеет большой вращающий момент |
| 6. Подходит для любых условий работы | |
| 7. Имеет высокий коэффициент полезного действия |
Недостатки асинхронных электродвигателей
| С короткозамкнутым ротором | С фазным ротором |
|---|---|
| 1. Не регулируется скорость вращения ротора | 1. Большие габариты |
| 2. Маленький пусковой момент | 2. Коэффициент полезного действия ниже |
| 3. Высокий пусковой ток | 3. Частое обслуживание из-за износа щеток |
| 4. Некоторая сложность конструкции и наличие движущихся контактов |
Асинхронные электродвигатели являются очень эффективными устройствами с отличными механическими характеристиками, и благодаря этому они являются лидерами по частоте применения.
Режимы работы
Электродвигатель асинхронного типа универсальный механизм и по продолжительности работы имеет несколько режимов:
- Продолжительный;
- Кратковременный;
- Периодический;
- Повторно-кратковременный;
- Особый.
Продолжительный режим — основной режим работы асинхронных устройств, который характеризуется постоянной работой электродвигателя без отключений с неизменной нагрузкой. Такой режим работы самый распространенный, используется на промышленных предприятиях повсеместно.
Кратковременный режим – работает до достижения постоянной нагрузки определенное время (от 10 до 90 минут), не успевая максимально разогреться. После этого отключается. Такой режим используют при подаче рабочих веществ (воду, нефть, газ) и прочих ситуациях.
Периодический режим – продолжительность работы имеет определенное значение и по завершении цикла работ отключается. Режим работы пуск-работа-остановка. При этом он может отключаться на время, за которое не успевает остыть до внешних температур и включаться заново.
Повторно-кратковременный режим – двигатель не нагревается максимально, но и не успевает остыть до внешней температуры. Применяется в лифтах, эскалаторах и прочих устройствах.
Особый режим – продолжительность и период включения произвольный.
В электротехнике существует принцип обратимости электрических машин — это означает, что устройство может, как преобразовывать электрическую энергию в механическую, так и совершать обратные действия.
Асинхронные электродвигатели тоже соответствуют этому принципу и имеют двигательный и генераторный режим работы.
Двигательный режим – основной режим работы асинхронного электродвигателя. При подаче напряжения на обмотки возникает электромагнитный вращающий момент, увлекающий за собой ротор с валом и, таким образом, вал начинает вращаться, двигатель выходит на постоянную частоту вращения, совершая полезную работу.
Генераторный режим – основан на принципе возбуждения электрического тока в обмотках двигателя при вращении ротора. Если вращать ротор двигателя механическим способом, то на обмотках статора образуется электродвижущая сила, при наличии конденсатора в обмотках возникает емкостный ток. Если емкость конденсатора будет определенного значения, зависящего от характеристик двигателя, то произойдет самовозбуждение генератора и возникнет трехфазная система напряжений. Таким образом короткозамкнутый электродвигатель будет работать как генератор.
Регулирование частоты вращения асинхронных двигателей
Для регулирования частоты вращения асинхронных электродвигателей и управления режимами их работы существуют следующие способы:
- Частотный – при изменении частоты тока в электрической сети изменяется частота вращения электрического двигателя. Для такого способа применяют устройство, которое называется частотный преобразователь;
- Реостатный – при изменении сопротивления реостата в роторе, изменяется частота вращения. Такой способ увеличивает пусковой момент и критическое скольжение;
- Импульсный – способ управления, при котором на двигатель подается напряжение специального вида.
- Переключение обмоток по время работы электрического двигателя со схемы «звезда» на схему «треугольник», что снижает пусковые токи;
- Управление с изменения пар полюсов для короткозамкнутых роторов;
- Подключение индуктивного сопротивления для двигателей с фазным ротором.
С развитием электронных систем, управление различными электродвигателями асинхронного типа становится все более эффективным и точным. Такие двигатели используются в мире повсеместно, разнообразие задач, выполняемых такими механизмами, с каждым днем растет, и потребность в них не уменьшается.
Асинхронный электродвигатель: устройство и принцип работы
Самым эффективным устройством, превращающим электрическую энергию в механическую, является асинхронный двигатель, изобретенный инженером Доливо-Добровольским в конце 19 века. Учитывая возрастающий интерес современников к разработке и сборке станков, самодвижущихся аппаратов и прочих механизмов, мы постараемся объяснить, как работает асинхронный электродвигатель, чтобы вы могли понять принцип его действия и результативно его использовать.
Устройство асинхронного электродвигателя
В его конструкцию входят следующие элементы:
- Статор цилиндрической формы, собранный из стальных листов. Сердечник статора имеет пазы, в которые уложены обмотки. Их оси сдвинуты на 120 градусов по отношению друг к другу.
- Ротор (короткозамкнутый или фазный). Первый вариант представляет собой сердечник с алюминиевыми стержнями, накоротко замкнутыми торцевыми кольцами (беличья клетка). Второй вариант состоит из трехфазной обмотки, чаще всего соединенной «звездой».
- Конструктивные детали – вал, подшипники, лапы, подшипниковые щиты, крыльчатка и кожух вентилятора, коробка выводов – обеспечивающие вращение, охлаждение и защиту механизма.
Схему асинхронного двигателя с указанием его деталей легко найти в интернете или в пособиях.
Принцип работы асинхронного двигателя
Принцип действия асинхронного электродвигателя заложен в его названии (не синхронный). То есть статор и ротор при включении создают вращающиеся с разной частотой магнитные поля. При этом частота вращения магнитного поля ротора всегда меньше частоты вращения магнитного поля статора.
Чтобы более наглядно представить себе этот процесс, возьмите постоянный магнит и покрутите его вокруг своей оси возле медного диска. Диск с небольшим отставанием начнет вращаться вслед за магнитом. Дело в том, что при вращении магнита в структуре диска возбуждаются токи Фуко (индукционные токи), движущиеся по замкнутому кругу. По сути они являются токами короткого замыкания, разогревающими металл. В диске «зарождается» собственное магнитное поле, в дальнейшем взаимодействующее с полем магнита.
В асинхронном двигателе для получения вращающегося поля используются обмотки статора. Магнитный поток, образованный ими, создает ЭДС в проводниках ротора. При взаимодействии магнитного поля статора и индуцируемого тока в обмотке ротора создается электромагнитная сила, приводящая во вращение вал электродвигателя.
Пошагово процесс выглядит следующим образом:
- При запуске двигателя магнитное поле статора пересекается с контуром ротора и индуцирует электродвижущую силу.
- В накоротко замкнутом роторе возникает переменный ток.
- Два магнитных поля (статора и ротора) создают крутящий момент.
- Крутящийся ротор пытается «догнать» поле статора.
- В тот момент, когда частоты вращения магнитного поля статора и ротора совпадут, электромагнитные процессы в роторе затухают и крутящий момент становится равным нулю.
- Магнитное поле статора возбуждает контур ротора, который к этому моменту снова отстает.
То есть ротор всегда медленнее магнитного поля статора, что и обеспечивает асинхронность.
Поскольку ток в роторе индуцируется бесконтактно, отпадает необходимость установки скользящих контактов, что делает асинхронные двигатели более надежными и эффективными. Изменяя направление тока в одной из обмоток (для этого нужно поменять фазы на клеммах), вы можете «заставить» мотор вращаться в ту или другую сторону.
Направление электромагнитной силы легко определить, вспомнив школьный курс физики и воспользовавшись «правилом левой руки».
На частоту вращения магнитного поля статора влияет частота питающей сети и число пар полюсов. Поскольку число пар полюсов зависит от типа двигателя и остается неизменным, то, если вы хотите изменить частоту вращения поля, необходимо изменить частоту питающей сети с помощью преобразователя.
Преимущества асинхронных двигателей
Благодаря тому, что устройство и принцип работы асинхронного электродвигателя достаточно просты, он обладает массой преимуществ и широко применяется во всех сферах народного хозяйства и в быту. Двигатели этого типа характеризуются:
- Надежностью и долговечностью. Отсутствие контакта между подвижными и неподвижными деталями сводит к минимуму возможность износа и поломок.
- Низкой стоимостью. Они доступны (не зря 90% от всех выпускающихся в мире двигателей именно асинхронные).
- Простотой эксплуатации. Для того чтобы использовать их, не обязательно иметь специальные знания и навыки.
- Универсальностью. Их можно установить практически на любое оборудование.
Изобретение асинхронного электродвигателя было значимым вкладом в развитие науки, промышленности и сельского хозяйства. С ним наша жизнь стала более комфортной.
Двигатель асинхронный – это… Что такое Двигатель асинхронный?
Асинхронная машина — это электрическая машина переменного тока, частота вращения ротора которой не равна (меньше) частоте вращения магнитного поля, создаваемого током обмотки статора. Асинхронные машины — наиболее распространённые электрические машины. В основном они используются как электродвигатели и являются основными преобразователями электрической энергии в механическую.
Конструкция
Как и любая электромеханическая машина, асинхронная машина имеет статор и ротор, разделённые воздушным зазором. Её активными частями являются обмотки и магнитопровод; все остальные части — конструктивные, обеспечивающие необходимую прочность, жёсткость, охлаждение, возможность вращения и т. п.
Обмотка статора представляет собой трёхфазную (в общем случае — многофазную) обмотку, проводники которой равномерно распределены по окружности статора и пофазно уложены в пазах с угловым расстоянием 120°. Фазы обмотки статора соединяют по стандартным схемам «треугольник» или «звезда» и подключают к сети трёхфазного тока. Магнитопровод статора перемагничивается в процессе изменения (вращения) магнитного потока обмотки возбуждения, поэтому его изготавливают шихтованным (набранным из пластин) из электротехнической стали для обеспечения минимальных магнитных потерь.
По конструкции ротора асинхронные машины подразделяют на два основных типа: с короткозамкнутым ротором и с фазным ротором. Оба типа имеют одинаковую конструкцию статора и отличаются лишь исполнением обмотки ротора. Магнитопровод ротора выполняется аналогично магнитопроводу статора — из электротехнической стали и шихтованным.
Короткозамкнутый ротор
Ротор асинхронной машины типа «беличья клетка»
Короткозамкнутая обмотка ротора, часто называемая «беличья клетка» из-за внешней схожести конструкции, состоит из медных или алюминиевых стержней, замкнутых накоротко с торцов двумя кольцами. Стержни этой обмотки вставляют в пазы сердечника ротора. В машинах малой и средней мощности ротор обычно изготавливают путём заливки расплавленного алюминиевого сплава в пазы сердечника ротора. Вместе со стержнями «беличьей клетки» отливают короткозамыкающие кольца и торцевые лопасти, осуществляющие самовентиляцию самого ротора и вентиляцию машины в целом. В машинах большой мощности «беличью клетку» выполняют из медных стержней, концы которых вваривают в короткозамыкающие кольца.
Зачастую пазы ротора или статора делают скошенными для уменьшения высших гармонических ЭДС, вызванных пульсациями магнитного потока из-за наличия зубцов, магнитное сопротивление которых существенно ниже магнитного сопротивления обмотки, а также для снижения шума, вызываемого магнитными причинами.
Асинхронные двигатели с таким ротором имеют небольшой пусковой момент и значительный пусковой ток, что является существенным недостатком «беличьей клетки». Поэтому их применяют в тех электрических приводах, где не требуются большие пусковые моменты. Из достоинств следует отметить лёгкость в изготовлении, малый момент инерции и отсутствие механического контакта со статической частью машины, что гарантирует долговечность и снижает затраты на обслуживание.
Фазный ротор
Фазный ротор имеет трёхфазную (в общем случае — многофазную) обмотку, обычно соединённую по схеме «звезда» и выведённую на контактные кольца, вращающиеся вместе с валом машины. С помощью металлографитовых щёток, скользящих по этим кольцам, в цепь обмотки ротора включают пускорегулирующий реостат, выполняющий роль добавочного активного сопротивления, одинакового для каждой фазы.
В двигателях с фазным ротором имеется возможность увеличивать пусковой момент до максимального значения(в первый момент времени) с помощью пускового реостата, тем самым уменьшая пусковой ток. Такие двигатели применяются для привода механизмов, которые пускают в ход при большой нагрузке.
Скорость вращения поля статора
При питании обмотки статора трёхфазным (в общем случае — многофазным) током создаётся вращающееся магнитное поле, синхронная частота вращения [об/мин] которого связана с частотой сети [Гц] соотношением:
- ,
где — число пар магнитных полюсов обмотки статора.
Двигательный режим
Если ротор неподвижен или частота его вращения меньше синхронной, то вращающееся магнитное поле пересекает проводники обмотки ротора и индуцирует в них ЭДС, под действием которой по обмотке ротора начинает течь ток. На проводники с током этой обмотки, расположенные в магнитном поле обмотки возбуждения, действуют электромагнитные силы; их суммарное усилие образует электромагнитный вращающий момент, увлекающий ротор за магнитным полем. Если этот момент достаточно велик, то ротор приходит во вращение, и его установившаяся частота вращения [об/мин] соответствует равенству электромагнитного момента тормозному, создаваемого нагрузкой на валу, силами трения в подшипниках и инерцией ротора. Частота вращения ротора не может достигнуть частоты вращения магнитного поля, так как в этом случае угловая скорость вращения магнитного поля относительно обмотки ротора станет равной нулю, магнитное поле перестанет индуцировать в обмотке ротора ЭДС и, в свою очередь, создавать крутящий момент; таким образом, для двигательного режима работы асинхронной машины справедливо неравенство:
- .
Относительная разность частот вращения магнитного поля и ротора называется скольжением:
- .
Очевидно, что при двигательном режиме .
Генераторный режим
Если ротор разогнать с помощью внешнего момента (например, каким-либо двигателем) до частоты, большей частоты вращения магнитного поля, то изменится направление ЭДС в обмотке ротора и активной составляющей тока ротора, то есть асинхронная машина перейдет в генераторный режим. При этом изменит направление и электромагнитный момент, который станет тормозящим. В генераторном режиме работы скольжение .
При отсутствии первоначального магнитного поля в обмотке статора поток возбуждения создают с помощью постоянных магнитов, либо за счёт остаточной индукции машины и пусковых конденсаторов, параллельно подключенных по схеме «звезда» к фазам обмотки статора .
Асинхронный генератор потребляет намагничивающий ток значительной силы и требует наличия в сети генераторов реактивной мощности в виде синхронных машин,синхронных компенсаторов,батарей статических конденсаторов(БСК). Несмотря на простоту обслуживания, асинхронный генератор применяют сравнительно редко, в основном как вспомогательные источники небольшой мощности и как тормозные устройства.
Режим электромагнитного тормоза
Если изменить направление вращения ротора или магнитного поля так, чтобы они вращались в противоположных направлениях, то ЭДС и активная составляющая тока в обмотке ротора будут направлены так же, как в двигательном режиме, и машина будет потреблять из сети активную мощность. Однако электромагнитный момент будет направлен встречно моменту нагрузки, являясь тормозящим. Такой режим работы асинхронной машины называется режимом электромагнитного тормоза, и для него справедливы неравенства .
Способы управления асинхронным двигателем
Под управлением асинхронным двигателем переменного тока понимается изменение частоты вращения ротора. Существуют следующие способы управления асинхронным двигателем:
- реостатный – изменение частоты вращения АД с фазным ротором путём изменения сопротивления реостата в цепи ротора,
- частотный – изменение частоты вращения АД путём изменения частоты тока в питающей сети, что влечёт за собой изменение частоты вращения поля статора. Применяется включение двигателя через частотный преобразователь,
- переключением обмоток со схемы «звезда» на схему «треугольник» в процессе пуска двигателя, что даёт снижение пусковых токов в обмотках примерно в три раза;
- импульсный – подачей напряжения питания специального вида (например, пилообразного),
- изменением числа пар полюсов, если такое переключение предусмотрено конструктивно,
- изменением амплитуды питающего напряжения, когда изменяется только амплитуда (или действующее значение) управляющего напряжения. Тогда векторы напряжений управления и возбуждения остаются перпендикулярны,
- Фазовое управление характерно тем, что изменение частоты вращения ротора достигается путём изменения сдвига фаз между векторами напряжений возбуждения и управления,
- Амплитудно-фазовый способ включает в себя оба предыдущих способа.
Ссылки
Wikimedia Foundation. 2010.
Принцип действия асинхронного двигателя — Asutpp
Электродвигатель предназначен для преобразования, с малыми потерями, электрическую энергию в механическую.
Предлагаем рассмотреть принцип действия асинхронного электродвигателя с короткозамкнутым ротором, трехфазного и однофазного типа, а также его конструкцию и схемы подключения.
Строение двигателя
Основные элементы электродвигателя это – статор, ротор, их обмотки и магнитопровод.
Преобразование электрической энергии в механическую происходит во вращающейся части мотора — роторе.
У двигателя переменного тока, ротор получает энергию не только за счет магнитного поля, но и при помощи индукции. Таким образом, они называются асинхронными двигателями. Это можно сравнить с вторичной обмоткой трансформатора. Эти асинхронные двигатели еще называют вращающимися трансформаторами. Чаще всего используется модели рассчитанные на трех фазное включение.
Конструкция асинхронного двигателяНаправление вращения электродвигателя задается правилом левой руки буравчика: оно демонстрирует связь между магнитным полем и проводником.
Второй очень важный закон – Фарадея:
- ЭДС наводиться в обмотке, но электромагнитный поток меняется во временем.
- Величина наведенной ЭДС прямо пропорциональна скорости изменения электрического потока.
- Направление ЭДС противодействует току.
Принцип действия
При подаче напряжения на неподвижные обмотки статора, оно создает магнитное в статора. Если подается напряжение переменного тока, то магнитный поток, созданный им, изменяется. Так статор производит изменение магнитного поля, и ротор получает магнитные потоки.
Таким образом, ротор электродвигателя принимает эти поток статора и, следовательно, вращается. Это основной принцип работы и скольжения в асинхронных машинах. Из вышеизложенного следует отметить, что магнитный поток статора (и его напряжение) должно быть равно переменному току для вращения ротора, так что асинхронная машина может работать только от сети переменного тока.
Принцип работы асинхронного двигателяКогда такие двигатели действуют в качестве генератора, они будет генерировать непосредственно переменный ток. В случае такой работы, ротор вращается с помощью внешних средств скажем, турбины. Если ротор имеет некоторый остаточный магнетизм, то есть некоторые магнитные свойства, которые сохраняет по типу магнита внутри материала, то ротор создает переменный поток в стационарной обмотке статора. Так что это обмотки статора будут получать наведенное напряжение по принципу индукции.
Индукционные генераторы используются в небольших магазинах и домашних хозяйствах, чтобы обеспечить дополнительную поддержку питания и являются наименее дорогостоящими из-за легкого монтажа. В последнее время они широко используется людьми в тех странах, где электрические машины теряют мощность из-за постоянных перепадов напряжения в питающей электросети. Большую часть времени, ротор вращается при помощи небольшого дизельного двигателя соединенного с асинхронным генератором переменного напряжения.
Как вращается ротор
Вращающийся магнитный поток проходит через воздушный зазор между статором, ротором и обмоткой неподвижных проводников в роторе. Этот вращающийся поток, создает напряжение в проводниках ротора, тем самым заставляя наводиться в них ЭДС. В соответствии с законом Фарадея электромагнитной индукции, именно это относительное движение между вращающимся магнитным потоком и неподвижными обмотками ротора, которые возбуждает ЭДС, и является основой вращения.
Двигатель с короткозамкнутым ротором, в котором проводники ротора образовывают замкнутую цепь, в следствии чего возникает ЭДС наводящая ток в нем, направление задается законом Ленса, и является таким, чтобы противодействовать причине его возникновения. Относительное движение ротора между вращающимся магнитным потоком и неподвижным проводником и является его действием к вращению. Таким образом, чтобы уменьшить относительную скорость, ротор начинает вращаться в том же направлении, что и вращающийся поток на обмотках статора, пытаясь поймать его. Частота наведенной на него ЭДС такая же, как частота питания.
Гребневые асинхронные двигатели
Когда напряжение питания низкое, возбуждение обмоток короткозамкнутого ротора не происходит. Это обусловлено тем что, когда число зубцов статора и число зубьев ротора равное, таким образом вызывая магнитную фиксацию между статором и ротором. Этот физический контакт иначе называется зубо-блокировкой или магнитной блокировкой. Данная проблема может быть преодолена путем увеличения количества пазов ротора или статора.
Подключение
Асинхронный двигатель можно остановить, просто поменяв местами любые два из выводов статора. Это используется во время чрезвычайных ситуаций. После он изменяет направление вращающегося потока, который производит вращающий момент, тем самым вызывая разрыв питания на роторе. Это называется противофазным торможением.
Видео: Как работает асинхронный двигатель
Для того чтобы этого не происходило в однофазном асинхронном двигателе, необходимо использование конденсаторного устройства.
Его нужно подключить к пусковой обмотке, но предварительно обязательно проводится его расчет. Формула
QC = Uс I2 = U2 I2 / sin2
Схема: Подключение асинхронного двигателяИз которой следует, что электрические машины переменного тока двухфазного или однофазного типа, должны снабжаться конденсаторами с мощностью, равной самой мощности двигателя.
Аналогия с муфтой
Рассматривая принцип действия асинхронного электродвигателя, используемого в промышленных машинах, и его технические характеристики, нужно сказать про вращающуюся муфту механического сцепления . Крутящий момент на валу привода должен равняться крутящему моменту на ведомом валу. Кроме того, следует подчеркнуть, что эти два момента являются одним и тем же, поскольку крутящий момент линейного преобразователя вызывается трением между дисков внутри самой муфты.
Электромагнитная муфта сцепленияПохожий принцип действия и у тягового двигателя с фазным ротором. Система такого мотора состоит из восьми полюсов (из которых 4 – основные, а 4 – добавочные), и остовы. На основных полюсах расположены медные катушки. Вращение такого механизма обязано зубчатой передаче, которая получает крутящий момент от вала якоря, так же называемого сердечником. Включение в сеть, производится четырьмя гибкими кабелями. Основное назначение многополюсного электродвигателя – приведение в движение тяжелой техники: тепловозы, тракторы, комбайны и в некоторых случаях, станки.
Достоинства и недостатки
Устройство асинхронного двигателя является практически универсальным, но так же, у данного механизма есть свои плюсы и минусы.
Преимущества асинхронных двигателей переменного тока:
- Конструкция простой формы.
- Низкая стоимость производства.
- Надежная и практичная в обращении конструкция.
- Не прихотлив в эксплуатации.
- Простая схема управления
Эффективность этих двигателей очень высока, так как нет потерь на трение, и относительно высокий коэффициент мощности.
Недостатки асинхронных двигателей переменного тока:
- Не возможен контроль скорости без потерь мощности.
- Если увеличивается нагрузка – уменьшается момент.
- Относительно небольшой пусковой момент.
Устройство и принцип действия асинхронных электродвигателей
Всем привет. Рад вас видеть у себя на сайте. Тема сегодняшней статьи: устройство и принцип действия асинхронных электродвигателей. Так же я бы хотел немного сказать о способах регулировки их частоты вращения, и перечислить их основные преимущества и недостатки.
Раньше, я уже писал статьи, касающиеся асинхронных электродвигателей. Если кому интересно, то можете почитать. Вот список:
Схема пуска асинхронного двигателя.
Расчёт тока электродвигателя.
Реверсивное управление асинхронным электродвигателем с короткозамкнутым ротором.
Ну а теперь давайте перейдём к теме сегодняшней статьи.
В нынешнее время, очень трудно представить, как бы существовали все промышленные предприятия, если бы не было асинхронных машин. Эти двигателя установлены практически везде. Даже дома у каждого человека есть такой двигатель. Он может стоять на вашей стиральной машинке, на вентиляторе, на насосной станции, в вытяжке и так далее.
Вообще асинхронный электродвигатель – это колоссальный прорыв в мировой промышленности. Во всём мире их выпускают более 90 процентов от количества всех выпускаемых двигателей.
Асинхронный электродвигатель – это электрическая машина, которая преобразовывает электрическую энергию в механическую. То есть потребляет электрический ток, а взамен дают крутящий момент, с помощью которого можно вращать многие агрегаты.
А само слово «асинхронный» — означает неодновременных или не совпадающий по времени. Потому что у таких двигателей частота вращения ротора немного отстаёт от частоты вращения электромагнитного поля статора. Ещё это отставанием называют – скольжением.
Обозначается это скольжение буквой: S
А вычисляется скольжение по такой формуле: S = ( n1 — n2 )/ n1 — 100%
Где, n1 – это синхронная частота магнитного поля статора;
n2 – это частота вращения вала.
Устройство асинхронного электродвигателя.
Двигатель состоит из таких частей:
1. Статор с обмотками. Или станина внутри которой находится статор с обмотками.
2. Ротор. Это если короткозамкнутый. А если фазный, то можно сказать, что это якорь или даже коллектор. Я думаю, ошибки не будет.
3. Подшипниковые щиты. На мощных двигателях ещё спереди стоят подшипниковые крышки с уплотнителями.
4. Подшипники. Могут стоять скольжения или качения, в зависимости от исполнения.
5. Вентилятор охлаждения. Изготавливается из пластмассы или металла.
6. Кожух вентилятора. Имеет прорези для подачи воздуха.
7. Борно или клеммная коробка. Для подключения кабелей.
Это все его основные детали, но в зависимости от вида, типа и исполнения может немного изменяться.
Асинхронные электродвигателя в основном выпускают двух видов: трёхфазные и однофазные. В свою очередь трёхфазные ещё подразделяются на подвиды: с короткозамкнутым ротором или фазным ротором.
Самые распространённые – это трёхфазные с короткозамкнутым ротор.
Статор имеет круглую форму и набирается с листов специальной стали, которые изолированы между собой, и эта собранная конструкция образует сердечник с пазами. В пазы сердечника укладываются обмотки, со специального обмоточного, изолированного лаком провода. Провод это отливают в основном из меди, но также есть и с алюминия. Если двигатель очень мощный, то обмотки делаю шиной. Обмотки укладывают так, чтобы они были сдвинуты относительно друг друга на 120 градусов. Соединяются обмотки статора в звезду или в треугольник.
Ротор, как выше я уже писал выше, бывает короткозамкнутый или фазный.
Короткозамкнутый представляет собой вал, на который надеваются листы, из тоже специальной, стали. Эти наборные листы образую сердечник, в пазы которого заливают расплавленный алюминий. Этот алюминий равномерно растекается по пазам и образует стержни. А по краям эти стержни замыкают алюминиевыми кольцами. Получается своего рода «беличья клетка».
Фазный ротор представляет собой вал с сердечником и тремя обмотками. Одни концы, которых обычно соединяют в звезду, а вторые три конца присоединяют к токосъемным кольцам. А на эти кольца, с помощью щёток подают электрический ток.
Если в цепь фазных обмоток добавить нагрузочный реостат, и при пуске двигателя увеличивать активное сопротивление, то таким способ можно уменьшить большие пусковые токи.
Принцип действия.
Когда на обмотки статора подаются электрический ток, то в этих обмотках возникает электрический поток. Как вы помните, из выше написанных слов, фазы у нас смещены относительно друг друга на 120 градусов. И вот этот поток в обмотках начинает вращаться.
И при вращении магнитного потока статора, в обмотках ротора появляется электрический ток, и своё магнитное поле. Два этих магнитных поля начинают взаимодействовать и заставляют вращаться ротор электродвигателя. Это если ротор короткозамкнутый.
По принципу роботы вот посмотрите видео ролик.
Ну а с фазным ротором, по сути, принцип тот же. Напряжение подаётся на статор и на ротор. Появляются два магнитных поля, которые начинают взаимодействовать и вращать ротор.
Достоинства и недостатки асинхронных двигателей.
Основные достоинства асинхронного электродвигателя с короткозамкнутым ротором:
1. Очень простое устройство, что позволяет сократить затраты на его изготовление.
2. Цена намного меньше по сравнению с другими двигателями.
3. Очень простая схема запуска.
4. Скорость вращения вала практически не меняется с увеличением нагрузки.
5. Хорошо переносит кратковременные перегрузы.
6. Возможность подключения трёхфазных двигателей в однофазную сеть.
7. Надёжность и возможность эксплуатировать практически в любых условиях.
8. Имеет очень высокий показатель КПД и cos φ.
Недостатки:
1. Не возможности контролировать частоту вращения ротора без потери мощности.
2. Если увеличить нагрузку, то уменьшается момент.
3. Пусковой момент очень мал по сравнению с другими машинами.
4. При недогрузе увеличивается показатель cos φ
5. Высокие показатели пусковых токов.
Достоинства двигателей с фазным ротором:
1. По сравнению с короткозамкнутыми двигателями, имеет достаточно большой вращающий момент. Что позволяет его запускать под нагрузкой.
2. Может работать с небольшим перегрузом, и при этом частота вращения вала практически не меняется.
3. Небольшой пусковой ток.
4. Можно применять автоматические пусковые устройства.
Недостатки:
1. Большие габариты.
2. Показатели КПД и cos φ меньше, чем у двигателей с короткозамкнутым ротором. И при недогрузе эти показатели имеют минимальное значение
3. Нужно обслуживать щёточный механизм.
На этом буду заканчивать свою статью. Если она была вам полезной, то поделитесь нею со своими друзьями в социальных сетях. Если есть вопросы, то задавайте их в комментариях и подписывайтесь на обновления. Пока.
С уважением Александр!
Читайте также статьи:
Однофазный асинхронный электродвигатель
Дмитрий Левкин
Однофазный асинхронный электродвигатель — это асинхронный электродвигатель, который работает от электрической сети однофазного переменного тока без использования частотного преобразователя и который в основном режиме работы (после пуска) использует только одну обмотку (фазу) статора.Конструкция однофазного двигателя с вспомогательной или пусковой обмоткой
Основными компонентами любого электродвигателя являются ротор и статор. Ротор – вращающаяся часть электродвигателя, статор – неподвижная часть электродвигателя, с помощью которого создается магнитное поле для вращения ротора.Основные части однофазного двигателя: ротор и статор
Статор имеет две обмотки, расположенные под углом 90° относительно друг друга. Основная обмотка называется главной (рабочей) и обычно занимает 2/3 пазов сердечника статора, другая обмотка называется вспомогательной (пусковой) и обычно занимает 1/3 пазов статора.
Двигатель фактически является двухфазным, но так как рабочей является только одна обмотка, электродвигатель называют однофазным.
Ротор обычно представляет из себя короткозамкнутую обмотку, также из-за схожести называемой “беличьей клеткой”. Медные или алюминиевые стержни которого с торцов замкнуты кольцами, а пространство между стержнями чаще всего заливается сплавом алюминия. Так же ротор однофазного двигателя может быть выполнен в виде полого немагнитного или полого ферромагнитного цилиндра.
Однофазный двигатель с вспомогательной обмоткой имеет 2 обмотки расположенные перпендикулярно относительно друг друга
Принцип работы однофазного асинхронного двигателя
Для того чтобы лучше понять работу однофазного асинхронного двигателя, давайте рассмотрим его только с одним витком в главной и вспомогательной обмотки.
Проанализируем случай с двумя обмотками имеющими по оному витку
Рассмотрим случай когда в вспомогательной обмотки не течет ток. При включении главной обмотки статора в сеть, переменный ток, проходя по обмотке, создает пульсирующее магнитное поле, неподвижное в пространстве, но изменяющееся от +Фmах до -Фmах.
Запустить
Остановить
Пульсирующее магнитное поле
Если поместить ротор, имеющий начальное вращение, в пульсирующее магнитное поле, то он будет продолжать вращаться в том же направлении.
Чтобы понять принцип действия однофазного асинхронного двигателя разложим пульсирующее магнитное поле на два одинаковых круговых поля, имеющих амплитуду равную Фmах/2 и вращающихся в противоположные стороны с одинаковой частотой:
,
- где nпр – частота вращения магнитного поля в прямом направлении, об/мин,
- nобр – частота вращения магнитного поля в обратном направлении, об/мин,
- f1 – частота тока статора, Гц,
- p – количество пар полюсов,
- n1 – скорость вращения магнитного потока, об/мин
Запустить
Остановить
Разложение пульсирующего магнитного потока на два вращающихся
Действие пульсирующего поля на вращающийся ротор
Рассмотрим случай когда ротор, находящийся в пульсирующем магнитном потоке, имеет начальное вращение. Например, мы вручную раскрутили вал однофазного двигателя, одна обмотка которого подключена к сети переменного тока. В этом случае при определенных условиях двигатель будет продолжать развивать вращающий момент, так как скольжение его ротора относительно прямого и обратного магнитного потока будет неодинаковым.
Будем считать, что прямой магнитный поток Фпр, вращается в направлении вращения ротора, а обратный магнитный поток Фобр – в противоположном направлении. Так как, частота вращения ротора n2 меньше частоты вращения магнитного потока n1, скольжение ротора относительно потока Фпр будет:
,
- где sпр – скольжение ротора относительно прямого магнитного потока,
- n2 – частота вращения ротора, об/мин,
- s – скольжение асинхронного двигателя
Прямой и обратный вращающиеся магнитные потоки вместо пульсирующего магнитного потока
Магнитный поток Фобр вращается встречно ротору, частота вращения ротора n2 относительно этого потока отрицательна, а скольжение ротора относительно Фобр
,
- где sобр – скольжение ротора относительно обратного магнитного потока
Запустить
Остановить
Вращающееся магнитное поле пронизывающее ротор
Ток индуцируемый в роторе переменным магнитным полем
Согласно закону электромагнитной индукции прямой Фпр и обратный Фобр магнитные потоки, создаваемые обмоткой статора, наводят в обмотке ротора ЭДС, которые соответственно создают в короткозамкнутом роторе токи I2пр и I2обр. При этом частота тока в роторе пропорциональна скольжению, следовательно:
,
- где f2пр – частота тока I2пр наводимого прямым магнитным потоком, Гц
,
- где f2обр – частота тока I2обр наводимого обратным магнитным потоком, Гц
Таким образом, при вращающемся роторе, электрический ток I2обр, наводимый обратным магнитным полем в обмотке ротора, имеет частоту f2обр, намного превышающую частоту f2пр тока ротора I2пр, наведенного прямым полем.
Пример: для однофазного асинхронного двигателя, работающего от сети с частотой f1 = 50 Гц при n1 = 1500 и n2 = 1440 об/мин,скольжение ротора относительно прямого магнитного потока sпр = 0,04;
частота тока наводимого прямым магнитным потоком f2пр = 2 Гц;
скольжение ротора относительно обратного магнитного потока sобр = 1,96;
частота тока наводимого обратным магнитным потоком f2обр = 98 Гц
Согласно закону Ампера, в результате взаимодействия электрического тока I2пр с магнитным полем Фпр возникает вращающий момент
,
- где Mпр – магнитный момент создаваемый прямым магнитным потоком, Н∙м,
- сM — постоянный коэффициент, определяемый конструкцией двигателя
Электрический ток I2обр, взаимодействуя с магнитным полем Фобр, создает тормозящий момент Мобр, направленный против вращения ротора, то есть встречно моменту Мпр:
,
- где Mобр – магнитный момент создаваемый обратным магнитным потоком, Н∙м
Результирующий вращающий момент, действующий на ротор однофазного асинхронного двигателя,
,
Справка: В следствие того, что во вращающемся роторе прямым и обратным магнитным полем будет наводиться ток разной частоты, моменты сил действующие на ротор в разных направлениях будут не равны. Поэтому ротор будет продолжать вращаться в пульсирующем магнитном поле в том направлении в котором он имел начальное вращение.
Тормозящее действие обратного поля
При работе однофазного двигателя в пределах номинальной нагрузки, то есть при небольших значениях скольжения s = sпр, крутящий момент создается в основном за счет момента Мпр. Тормозящее действие момента обратного поля Мобр — незначительно. Это связано с тем, что частота f2обр много больше частоты f2пр, следовательно, индуктивное сопротивление рассеяния обмотки ротора х2обр = x2sобр току I2обр намного больше его активного сопротивления. Поэтому ток I2обр, имеющий большую индуктивную составляющую, оказывает сильное размагничивающее действие на обратный магнитный поток Фобр, значительно ослабляя его.
,
- где r2 – активное сопротивление стержней ротора, Ом,
- x2обр – реактивное сопротивление стержней ротора, Ом.
Если учесть, что коэффициент мощности невелик, то станет, ясно, почему Мобр в режиме нагрузки двигателя не оказывает значительного тормозящего действия на ротор однофазного двигателя.
С помощью одной фазы нельзя запустить ротор
Ротор имеющий начальное вращение будет продолжать вращаться в поле создаваемом однофазным статором
Действие пульсирующего поля на неподвижный ротор
При неподвижном роторе (n2 = 0) скольжение sпр = sобр = 1 и Мпр = Мобр, поэтому начальный пусковой момент однофазного асинхронного двигателя Мп = 0. Для создания пускового момента необходимо привести ротор во вращение в ту или иную сторону. Тогда s ≠ 1, нарушается равенство моментов Мпр и Мобр и результирующий электромагнитный момент приобретает некоторое значение .
Пуск однофазного двигателя. Как создать начальное вращение?
Одним из способов создания пускового момента в однофазном асинхронном двигателе, является расположение вспомогательной (пусковой) обмотки B, смещенной в пространстве относительно главной (рабочей) обмотки A на угол 90 электрических градусов. Чтобы обмотки статора создавали вращающееся магнитное поле токи IA и IB в обмотках должны быть сдвинуты по фазе относительно друг друга. Для получения фазового сдвига между токами IA и IB в цепь вспомогательной (пусковой) обмотки В включают фазосмещающий элемент, в качестве которого используют активное сопротивление (резистор), индуктивность (дроссель) или емкость (конденсатор) [1].
После того как ротор двигателя разгонится до частоты вращения, близкой к установившейся, пусковую обмотку В отключают. Отключение вспомогательной обмотки происходит либо автоматически с помощью центробежного выключателя, реле времени, токового или дифференциального реле, или же вручную с помощью кнопки.
Таким образом, во время пуска двигатель работает как двухфазный, а по окончании пуска — как однофазный.
Подключение однофазного двигателя
С пусковым сопротивлением
Двигатель с расщепленной фазой – однофазный асинхронный двигатель, имеющий на статоре вспомогательную первичную обмотку, смещенную относительно основной, и короткозамкнутый ротор [2].
Однофазный асинхронный двигатель с пусковым сопротивлением – двигатель с расщепленной фазой, у которого цепь вспомогательной обмотки отличается повышенным активным сопротивлением.
Омический сдвиг фаз, биффилярный способ намотки пусковой обмотки
Разное сопротивление и индуктивность обмоток
Для запуска однофазного двигателя можно использовать пусковой резистор, который последовательно подключается к пусковой обмотки. В этом случае можно добиться сдвига фаз в 30° между токами главной и вспомогательной обмотки, которого вполне достаточно для пуска двигателя. В двигателе с пусковым сопротивлением разность фаз объясняется разным комплексным сопротивлением цепей.
Также сдвиг фаз можно создать за счет использования пусковой обмотки с меньшей индуктивностью и более высоким сопротивлением. Для этого пусковая обмотка делается с меньшим количеством витков и с использованием более тонкого провода чем в главной обмотке.
Отечественной промышленностью изготавливается серия однофазных асинхронных электродвигателей с активным сопротивлением в качестве фазосдвигающего элемента серии АОЛБ мощностью от 18 до 600 Вт при синхронной частоте вращения 3000 и 1500 об/мин, предназначенных для включения в сеть напряжением 127, 220 или 380 В, частотой 50 Гц.
С конденсаторным пуском
Двигатель с конденсаторным пуском – двигатель с расщепленной фазой, у которого цепь вспомогательной обмотки с конденсатором включается только на время пуска.
Ёмкостной сдвиг фаз с пусковым конденсатором
Чтобы достичь максимального пускового момента требуется создать круговое вращающееся магнитное поле, для этого требуется чтобы токи в главной и вспомогательной обмотках были сдвинуты друг относительно друга на 90°. Использование в качестве фазосдвигающего элемента резистора или дросселя не позволяет обеспечить требуемый сдвиг фаз. Лишь включение конденсатора определенной емкости позволяет обеспечить фазовый сдвиг 90°.
Среди фазосдвигающих элементов, только конденсатор позволяет добиться наилучших пусковых свойств однофазного асинхронного электродвигателя.
Двигатели в цепь которых постоянно включен конденсатор используют для работы две фазы и называются – конденсаторными. Принцип действия этих двигателей основан на использовании вращающегося магнитного поля.
Двигатель с экранированными полюсами – двигатель с расщепленной фазой, у которого вспомогательная обмотка короткозамкнута.
Статор однофазного асинхронного двигателя с экранированными полюсами обычно имеет явно выраженные полюса. На явно выраженных полюсах статора намотаны катушки однофазной обмотки возбуждения. Каждый полюс статора разделен на две неравные части аксиальным пазом. Меньшую часть полюса охватывает короткозамкнутый виток. Ротор однофазного двигателя с экранированными полюсами – короткозамкнутый в виде “беличьей” клетки.
При включении однофазной обмотки статора в сеть в магнитопроводе двигателя создается пульсирующий магнитный поток. Одна часть которого проходит по неэкранированной Ф’, а другая Ф” – по экранированной части полюса. Поток Ф” наводит в короткозамкнутом витке ЭДС Ek, в результате чего возникает ток Ik отстающий от Ek по фазе из-за индуктивности витка. Ток Ik создает магнитный поток Фk, направленный встречно Ф”, создавая результирующий поток в экранированной части полюса Фэ=Ф”+Фk. Таким образом, в двигателе потоки экранированной и неэкранированной частей полюса сдвинуты во времени на некоторый угол.
Пространственный и временной углы сдвига между потоками Фэ и Ф’ создают условия для возникновения в двигателе вращающегося эллиптического магнитного поля, так как Фэ ≠ Ф’.
Пусковые и рабочие свойства рассматриваемого двигателя невысоки. КПД намного ниже, чем у конденсаторных двигателей такой же мощности, что связано со значительными электрическими потерями в короткозамкнутом витке.
Статор такого однофазного двигателя выполняется с ярко выраженными полюсами на не симметричном шихтованном сердечнике. Ротор – короткозамкнутый типа “беличья клетка”.
Данный электродвигатель для работы не требует использования фазосдвигающих элементов. Недостатком данного двигателя является низкий КПД.
отличия, принцип работы, применение. Достоинства и использование асинхронных электродвигателей
В основу работы любых электродвигателей положен принцип электромагнитной индукции. Электродвигатель состоит из неподвижной части — статора (для асинхронных и синхронных движков переменного тока) либо индуктора (для движков постоянного тока) и подвижной части — ротора (для асинхронных и синхронных движков переменного тока) либо якоря (для движков постоянного тока). В роли индуктора на маломощных двигателях постоянного тока нередко используются постоянные магниты.
Все двигатели, грубо говоря можно поделить на два вида:
двигатели постоянного тока
двигатели переменного тока (асинхронные и синхронные)
Двигатели постоянного тока
По неким мнениям данный двигатель возможно еще назвать синхронной машиной постоянного тока с самосинхронизацией. Простой движок, являющийся машиной постоянного тока, состоит из постоянного магнита на индукторе (статоре), 1-го электромагнита с очевидно выраженными полюсами на якоре (двухзубцового якоря с явно выраженными полюсами и с одной обмоткой), щёточноколлекторного узла с 2-мя пластинами (ламелями) и 2-мя щётками.Простой двигатель имеет 2 положения ротора (2 “мёртвые точки”), из которых неосуществим самозапуск, и неравномерный крутящий момент. В первом приближении магнитное поле полюсов статора равномерное (однородное).
Данные двигатели с наличием щёточно-коллекторного узла бывают:
Колекторные – электрическое устройство, в котором датчиком положения ротора и переключателем тока в обмотках является одно и то же устройство — щёточно-коллекторный узел.
Бесколекторные – замкнутая электромеханическая система, состоящая из синхронного устройства с синусоидальным распределением магнитного поля в зазоре, датчика положения ротора, преобразователя координат и усилителя мощности. Более дорогой вариант в сравнение с колекторными двигателями.
Двигатели переменного тока
По типу работы данные двигатели делятся на синхронные и асинхронные двигатели. Принципное отличие заключается в том, что в синхронных машинах 1-ая гармоника магнитодвижущей силы статора перемещается со скоростью вращения ротора (по этому сам ротор крутится со скоростью вращения магнитного поля в статоре), а у асинхронных — есть и остается разница меж скоростью вращения ротора и скоростью вращения магнитного поля в статоре (поле крутится быстрее ротора). Синхронный – двигатель переменного тока, ротор которого крутится синхронно с магнитным полем питающего напряжения. Эти движки традиционно применяются при огромных мощностях (от сотен киловатт и выше).Есть синхронные двигатели с дискретным угловым движением ротора — шаговые двигатели. У них данное положение ротора фиксируется подачей питания на соответствующие обмотки. Переход в другое положение исполняется путём снятия напряжения питания с одних обмоток и передачи его на другие обмотки двигателя.
Ещё один вид синхронных движков — вентильный реактивный эл-двигатель, питание обмоток которого складывается с помощью полупроводниковых элементов.
Асинхронный – двигатель переменного тока, в котором частота вращения ротора различается от частоты крутящего магнитного поля, творимого питающим напряжением, второе название асинхронных машин – индукционные обосновано тем, что ток в обмотке ротора индуцируется вертящимся полем статора. Асинхронные машины сейчас оформляют огромную часть электрических машин. В главном они используются в виде электродвигателей и считаются ключевыми преобразователями электрической энергии в механическую, причём в основном используются асинхронные движки с короткозамкнутым ротором
По количеству фаз двигатели бывают:
- однофазные
- двухфазные
- трехфазные
Самые популярные и шыроковостребованые двигатели которые применяются в производстве и бытовом хозяйстве:
Однофазный асинхронный двигатель с короткозамкнутым ротором
Однофазовый асинхронный движок имеет на статоре только 1 рабочую обмотку, на которую в ходе работы мотора подается переменный ток. Хотя для запуска мотора на его статоре есть и вспомогательная обмотка, которая краткосрочно подключается к сети через конденсатор либо индуктивность, или замыкается накоротко пусковыми контактами рубильника. Это нужно для создания исходного сдвига фаз, чтоб ротор начал крутиться, по другому пульсирующее магнитное поле статора не здвинуло б ротор с места.Ротор такового мотора, как и любого иного асинхронного мотора с короткозамкнутым ротором, являет из себя цилиндрический сердечник с залитыми алюминием пазами, с сразу отлитыми вентиляционными лопастями.
Таковой ротор именуется короткозамкнутым ротором. Однофазовые движки используются в маломощных устройствах, в том числе комнатные вентиляторы либо маленькие насосы.
Двухфазный асинхронный двигатель с короткозамкнутым ротором
Двухфазные асинхронные движки более эффективны при работе от однофазовой сети переменного тока. Они содержат на статоре две рабочие обмотки, находящиеся перпендикулярно, при этом одна из обмоток подключается к сети переменного тока напрямую, а вторая – через фазосдвигающий конденсатор, так выходит крутящееся магнитное поле, а вот без конденсатора ротор бы не двинулся с места.Данные двигатели помимо прочего имеют короткозамкнутый ротор, а их использование еще обширнее, нежели у однофазовых. Тут уже и стиральные машинки, и разные станки. Двухфазные движки для питания от однофазовых сетей называют конденсаторными двигателями, потому что фазосдвигающий конденсатор считается часто обязательной их частью.
Трехфазный асинхронный двигатель с короткозамкнутым ротором
Трехфазный асинхронный двигатель имеет на статоре три рабочие обмотки, сдвинутые сравнительно друг друга так, что при подключении в трехфазную сеть, их магнитные поля получаются смещенными в пространстве сравнительно друг дружку на 120 градусов. При включении трехфазного мотора к трехфазной сети переменного тока, появляется крутящееся магнитное поле, приводящее в перемещение короткозамкнутый ротор.Обмотки статора трехфазного мотора возможно соединить по схеме «звезда» либо «треугольник», при этом для питания мотора по схеме «звезда» потребуется напряжение выше, чем для схемы «треугольник», и на движке, потому, указываются 2 напряжения, к примеру: 127/220 либо 220/380. Трехфазные движки незаменимы для приведения в действие разных станков, лебедок, циркулярных пил, подъемных кранов, и т.п.
Трехфазный асинхронный двигатель с фазным ротором
Трехфазный асинхронный движок с фазным ротором имеет статор подобный описанным выше типам движков, шихтованный магнитопровод с 3-мя уложенными в его пазы обмотками, но в фазный ротор не залиты дюралевые стержни, а уложена уже настоящая трехфазная обмотка, в соединении «звезда». Концы звезды обмотки фазного ротора выведены на три контактных кольца, насаженных на вал ротора, и электрически отделенных от него.Посредством щеток, на кольца помимо прочего подается трехфазное переменное напряжение, и включение может быть осуществлено как впрямую, так и через реостаты. Непременно, движки с фазным ротором стоят подороже, хотя их пусковой момент под нагрузкой значительно повыше, нежели у типов движков с короткозамкнутым ротором. Именно в следствие завышенной силы и огромного пускового момента, данный вид движков отыскал использование в приводах лифтов и подъемных кранов, другими словами там, где прибор запускается под нагрузкой а не в холостую, как у двигателей с короткозамкнутым ротором.
В данной статье рассмотрим принципиальные отличия синхронных электродвигателей от асинхронных, чтобы каждый читающий эти строки мог бы эти различия четко понимать.
Более широко распространены сегодня, однако в некоторых ситуациях синхронные двигатели оказываются более подходящими, более эффективными для решения конкретных промышленных и производственных задач, об этом будет рассказано далее.
Прежде всего давайте вспомним, что же вообще такое электродвигатель. называется электрическая машина, предназначенная для преобразования электрической энергии в механическую энергию вращения ротора, и служащая в качестве привода для какого-нибудь механизма, например для приведения в действие подъемного крана или насоса.
Еще в школе всем рассказывали и показывали, как два магнита отталкиваются одноименными полюсами, а разноименными – притягиваются. Это . Но существуют и переменные магниты. Каждый помнит рисунок с проводящей рамкой, расположенной между полюсами подковообразного постоянного магнита.
Горизонтально расположенная рамка, если по ней пустить постоянный ток, станет поворачиваться в магнитном поле постоянного магнита под действием пары сил (), пока не будет достигнуто равновесие в вертикальном положении.
Если затем по рамке пустить постоянный ток противоположного направления, то рамка повернется дальше. В результате такого попеременного питания рамки постоянным током то одного, то другого направления, достигается непрерывное вращение рамки. Рамка здесь представляет собой аналог переменного магнита.
Приведенный пример с вращающейся рамкой в простейшей форме демонстрирует принцип работы синхронного электродвигателя. У любого синхронного электродвигателя на роторе есть обмотки возбуждения, на которые подается постоянный ток, формирующий магнитное поле ротора. Статор же синхронного электродвигателя содержит обмотку статора, для формирования магнитного поля статора.
При подаче на обмотку статора переменного тока, ротор придет во вращение с частотой, соответствующей частоте тока в обмотке статора. Частота вращения ротора будет синхронна частоте тока обмотки статора, поэтому такой электродвигатель называется синхронным. Магнитное поле ротора создается током, а не индуцируется полем статора, поэтому синхронный двигатель способен держать синхронные номинальные обороты независимо от мощности нагрузки, разумеется, в разумных пределах.
Асинхронный электродвигатель в свою очередь отличается от синхронного. Если вспомнить рисунок в рамкой, и рамку просто накоротко замкнуть, то при вращении магнита вокруг рамки, индуцируемый в рамке ток создаст магнитное поле рамки, и рамка будет стремиться догнать магнит.
Частота вращения рамки под механической нагрузкой будет всегда меньше частоты вращения магнита, и частота не будет поэтому синхронной. Этот простой пример демонстрирует принцип действия асинхронного электродвигателя.
В асинхронном электродвигателе вращающееся магнитное поле формируется переменным током обмотки статора, расположенной в его пазах. Ротор типичного асинхронного двигателя обмоток как таковых не имеет, вместо этого на нем расположены накоротко соединенные стержни (ротор типа «беличья клетка»), такой ротор называется короткозамкнутым ротором. Бывают еще асинхронные двигатели с фазным ротором, там ротор содержит обмотки, сопротивление и ток в которых можно регулировать реостатом.
Итак, в чем же принципиальное отличие асинхронного электродвигателя от синхронного? С виду внешне они похожи, порой даже специалист не отличит по внешним признакам синхронный электродвигатель от асинхронного. Главное же отличие заключается в устройстве роторов. Ротор асинхронного электродвигателя не питается током, а полюса на нем индуцирутся магнитным полем статора.
Ротор синхронного двигателя имеет обмотку возбуждения с независимым питанием. Статоры синхронного и асинхронного двигателя устроены одинаково, функция в каждом случае одна и та же – создание вращающегося магнитного поля статора.
Обороты асинхронного двигателя под нагрузкой всегда на величину скольжения отстают от вращения магнитного поля статора, в то время как обороты синхронного двигателя равны по частоте «оборотам» магнитного поля статора, поэтому если обороты должны быть постоянными при различных нагрузках, предпочтительней выбирать синхронный двигатель, например в приводе гильотинных ножниц лучше всего справится со своей задачей мощный синхронный двигатель.
Область применения асинхронных двигателей сегодня очень широка. Это всевозможные станки, транспортеры, вентиляторы, насосы, – все то оборудование, где нагрузка сравнительно стабильна, или снижение оборотов под нагрузкой не критично для рабочего процесса.
Некоторые компрессоры и насосы требуют постоянной частоты вращения при любой нагрузке, на такое оборудование ставят синхронные электродвигатели.
Синхронные двигатели дороже в производстве, чем асинхронные, поэтому если есть возможность выбора и небольшое снижение оборотов под нагрузкой не критично, приобретают асинхронный двигатель.
Синхронные электродвигатели широко применяются в электроприводах, не требующих регулирования частоты вращения. По сравнению с асинхронными двигателями они имеют ряд преимуществ:
более высокий коэффициент полезного действия;
возможность изготовления двигателей с низкой частотой вращения, что позволяет отказаться от промежуточных передач между двигателем и рабочей машиной;
частота вращения двигателя не зависит от нагрузки па его валу;
возможность использования в качестве компенсирующих устройств реактивной мощности.
Синхронные электродвигатели могут являться потребителями и генераторами . Характер и значение реактивной мощности синхронного двигателя зависят от величины тока в обмотке возбуждения. Зависимость тока в обмотке, выдающей напряжение в электрическую сеть, от тока возбуждения носит название U-образной характеристики синхронного двигателя. При 100%-ной нагрузке на валу двигателя его равен 1. При этом электродвигатель не потребляет реактивной мощности из электрической сети. Ток в обмотке статора при этом имеет минимальное значение.
Существуют различные виды электродвигателей, и очень часто возникает вопрос, в чем же отличия между синхронным и асинхронным двигателем. В асинхронном обмотки, расположенные в статоре, создают вращающееся магнитное поле, взаимодействующее с токами, образующимися в роторе, благодаря чему он приходит во вращающееся состояние. Поэтому, в настоящее время, наиболее популярным считается простой и надежный асинхронный электродвигатель, имеющий короткозамкнутый ротор.
Асинхронный двигатель
В его пазах расположены токопроводящие стержни из алюминия или меди, соединенные своими концами с кольцами из такого же материала, которые производят короткое замыкание этих стержней. Поэтому, ротор и называется короткозамкнутым. Вихревые токи, взаимодействующие с полем, вызывают вращение ротора со скоростью, меньшей, чем скорость вращения самого поля. Таким образом, весь двигатель получил название асинхронного. Это движение получило название относительного скольжения, поскольку скорости ротора и магнитного поля неравны и магнитное поле не пересекается с токопроводящими стержнями ротора. Поэтому, они не создают вращающийся момент.
Принципиальным отличием обоих видов двигателей является исполнение ротора. В синхронном он представляет собой постоянный магнит относительно небольшой мощности или такой же электромагнит. Вращающийся магнит, создающий статора, приводит в движение магнитный ротор. Скорость движения статора и ротора, в этом случае, одинаковая. Поэтому, данный двигатель получил название синхронного.
Особенности синхронного двигателя
Синхронный двигатель отличается возможностью значительного опережения током напряжения по фазе. Повышая коэффициент мощности по типу конденсаторных батарей.
Асинхронные электродвигатели отличаются простотой конструкции и надежностью в эксплуатации. Единственный недостаток этих агрегатов заключается в достаточной трудности регулировки частоты их вращения. асинхронные двигатели могут быть легко реверсированы, то есть вращение двигателя может измениться на противоположное направление. Для этого, достаточно изменить место расположения двух линейных проводов или фаз, которые замыкаются на обмотку статора. В отличие от синхронного, это простой и дешевый двигатель, применяющийся повсеместно.
Синхронный и асинхронный двигатель имеет еще и такое важное отличие, как постоянная частота вращения у первого при различных нагрузках. Поэтому их применяют в приводах машин, требующих постоянных скоростей, например, в компрессорах, насосах или вентиляторах, поскольку они очень легки в управлении.
Классификация электродвигателей
Трехфазные асинхронные двигатели составляют основу современного электропривода. От ДПТ их отличает простота конструкции, надежность, высокие технико-экономические показатели. В настоящее время частотные преобразователи позволили сделать регулировочные свойства АД более лучшими, чем у ДПТ с НВ.
По конструкции ротора АД разделяются на двигатели и короткозамкнутым ротором (КЗР) и двигатели с фазным ротором (ФР). Наиболее простая конструкция у АД с КЗР. Ротор такого двигателя не имеет выводов, так как его обмотка выполнена в виде короткозамкнутой клетки (беличья клетка). Его обмотка выполнена в виде ряда медных или алюминиевых стержней, расположенных по периметру сердечника ротора, замкнутые в двух сторон короткозамыкающими кольцами. Простота конструкции обеспечивает им высокую надежность, простоту обслуживания и невысокую стоимость. Схема включения АД СС КЗР представлена на рис. 4.1, а.
Фазный ротор имеет трехфазную обмотку, выполненную по типу обмотки статора (рис. 4.1, б). Одни концы катушек соединены в нулевую точку («звезда»), а другие – подключены к контактным кольцам. На кольца наложены щетки, осуществляющие скользящий контакт с обмоткой ротора. При такой конструкции возможно подсоединение к обмотке ротора пускового или регулировочного реостата, позволяющего менять электрическое сопротивление в цепи ротора. Такие двигатели более сложны в изготовлении и эксплуатации, поэтому применяются только там, где применение АД с КЗР не обеспечит требованиям в приводу механизма.
Ротор АД отстаёт от вращающегося магнитного поля статора, которое создается обмоткой статора, то есть вращение происходит асинхронно. В этих условиях вращающееся поле статора индуцирует ЭДС в обмотке роторе, под действием которого в роторе протекает ток, который взаимодействует с вращающимся магнитным полем (ВМП), создавая вращающий момент двигателя. В рабочих режимах разница частот вращения статора и ротора не велика и составляет несколько процентов. При рассмотрение рабочих процессов АД обычно используют понятие скольжения
Скорость асинхронного двигателя в рабочих режимах
где синхронная частота вращения магнитного поля ; – частота питающего напряжения ; – число пар полюсов.
Статор синхронного двигателя (СД) конструктивно не отличается от статора АД. Ротор СД имеет явнополюсную конструкцию, на полюсах которого расположена обмотка возбуждения. При включении обмотки к источнику постоянного тока в двигателе создается дополнительное магнитное поле. Таким образом, для работы синхронного двигателя кроме 3х-фазного переменного напряжения требуется также постоянное. Исключение составляют двигатели, возбуждаемые постоянными магнитами. Такие двигатели обладают абсолютно жесткой механической характеристикой: ротор двигателя вращается синхронно с вращающимся магнитным полем с частотой .
В отличие от АД, синхронные не создают пускового момента, так как ротор двигателя по причине инерционности не может мгновенно разогнаться до синхронной скорости. Для пуска СД необходимо предварительно привести его во вращение до скорости, близкой к синхронной ( . С этой целью применяют асинхронный пуск, для чего на роторе двигателя располагается пусковая обмотка, конструктивно похожая на беличью клетку.
Процесс асинхронного пуска СД протекает следующим образом (рис. 4.2).
При включении обмотки статора СД в сеть СД запускается как асинхронный. При этом обмотку возбуждения замыкают на сопротивление для ограничения величины ЭДС, которая наводится в ОВ при пуске двигателя. При достижении скорости вращения близкой к номинальной, обмотку возбуждения подключают к постоянному напряжению, и двигатель втягивается в синхронизм, то есть скорость вращения двигателя становится равной синхронной скорости.
Синхронные двигатели изготавливаются на большие мощности: от сотен до тысяч киловатт. Объясняется это тем, что при меньших мощностях их применение нецелесообразно по технико-экономическим показателям.
СД обычно имеют целевое назначение, то есть каждая серия разработана для конкретных механизмов (для шаровых мельниц – СДМЗ, для привода компрессоров – СДК, для привода насосов – ВДС и др.).
Синхронные двигатели имеют перегрузочную способность .
Еще одной особенностью СД является возможность работать с величиной , более того, при перевозбуждении синхронный двигатель начинает генерировать емкостную нагрузку. Для повышении в сети используют синхронные компенсаторы, представляющие собой перевозбужденные СД специальной конструкции, работающие без нагрузки на валу.
Основывается на разных параметрах. По одному из них, различают синхронный и асинхронный двигатель. Отличия приборов, общая характеристика и принцип работы описаны в статье.
Синхронный двигатель
Этот тип двигателя способен работать одновременно и в качестве генератора, и как, собственно, двигатель. Его устройство сродни Характерной особенностью двигателя является неизменяемая частота роторного вращения от нагрузки.
Эти виды двигателей широко применяются во многих сферах, например, для электрических проводов, которым необходима постоянная скорость.
Принцип работы синхронного двигателя
В основу его функционирования положено взаимодействие вращающегося магнитного поля якоря и магнитных полей индукторных полюсов. Обычно якорь находится в статоре, а индуктор распологается в роторе. Для мощных моторов используются электрические магниты для полюсов, а для слабых — постоянные.
Преимущества и недостатки
Основными минусами этого вида двигателя являются:
- необходимость питания обмотки постоянным током;
- сложность запуска;
- скользящий контакт.
Большинство генераторов, где бы они ни использовались, являются синхронными. Преимуществами таких двигателей в целом являются:
- самая высокая надежность;
- самый большой ;
- простота обслуживания.
Асинхронный двигатель
Данный вид устройста представляет механизм, направленный на трансформацию электрической энергии в механическую. Из самого названия «асинхронный» можно сделать вывод, что речь идет о неодновременном процессе. И действительно, частота вращения магнитного поля статора здесь выше роторной всегда.
Такое устройство состоит из статора цилиндрической формы и ротора, в зависимости от вида которого асинхронные двигатели короткозамкнутые могут быть и с фазным ротором.
Принцип действия
Работа двигателя осуществляется на основе взаимодействия магнитного статорного поля и наводящихся этим же полем токов в роторе. Вращающий момент появляется тогда, когда имеется разность частоты вращения полей.
Резюмируем теперь, чем отличается от асинхронного. Чем объясняется широкое применение одного типа и ограниченное — другого?
Синхронный и асинхронный двигатель: отличия
Отличие работы двигателей – в роторе. У синхронного типа он заключается в постоянном или электрическом магните. Благодаря притягиванию разноименных полюсов вращающееся поле статора влечет и магнитный ротор. Их скорость получается одинаковой. Отсюда и название — синхронный.
В нем можно добиться, в отличие от асинхронного, даже опережения напряжения по фазам. Тогда устройство, подобно батареям конденсатора, может применяться для увеличения мощности.
Асинхронные двигатели, в свою очередь, просты и надежны, но их недостатком является трудность регулировки частоты вращения. Для реверсирования трехфазного асинхронного двигателя (то есть изменения направления его вращения в противоположную сторону) меняют расположение двух фаз или двух линейных проводов, приближающихся к обмотке статора.
Если рассматривать частоту вращения, то имеют и здесь синхронный и асинхронный двигатель отличия. В синхронном типе этот показатель является постоянным, в отличие от асинхронного. Поэтому первый используют там, где необходима постоянная скорость и полная управляемость, например, в насосах, вентиляторах и компрессорах.
Выявить на том или ином устройстве наличие рассматриваемых типов приборов очень просто. На асинхронном двигателе будет не круглое число оборотов (например, девятьсот тридцать в минуту), в то время как на синхронном — круглое (например, тысяча оборотов в минуту).
И те, и другие моторы управляются достаточно сложно. Синхронный тип имеет жесткую характеристику механики: при любой меняющейся нагрузке на вал мотора частота вращения будет одной и той же. При этом нагрузка, конечно, должна меняться с учетом того, чтобы двигатель способен ее выдержать, иначе это приведет к поломке механизма.
Так устроен синхронный и асинхронный двигатель. Отличия обоих видов обуславливают сферу их использования, когда один вид справляется с задачей оптимальным образом, для другого это будет проблематичным. В то же время можно встретить и комбинированные механизмы.
Как отличить асинхронный двигатель от двигателя постоянного тока. Конструкционные отличия синхронного и асинхронного двигателя
Трехфазные асинхронные двигатели составляют основу современного электропривода. От ДПТ их отличает простота конструкции, надежность, высокие технико-экономические показатели. В настоящее время частотные преобразователи позволили сделать регулировочные свойства АД более лучшими, чем у ДПТ с НВ.
По конструкции ротора АД разделяются на двигатели и короткозамкнутым ротором (КЗР) и двигатели с фазным ротором (ФР). Наиболее простая конструкция у АД с КЗР. Ротор такого двигателя не имеет выводов, так как его обмотка выполнена в виде короткозамкнутой клетки (беличья клетка). Его обмотка выполнена в виде ряда медных или алюминиевых стержней, расположенных по периметру сердечника ротора, замкнутые в двух сторон короткозамыкающими кольцами. Простота конструкции обеспечивает им высокую надежность, простоту обслуживания и невысокую стоимость. Схема включения АД СС КЗР представлена на рис. 4.1, а.
Фазный ротор имеет трехфазную обмотку, выполненную по типу обмотки статора (рис. 4.1, б). Одни концы катушек соединены в нулевую точку («звезда»), а другие – подключены к контактным кольцам. На кольца наложены щетки, осуществляющие скользящий контакт с обмоткой ротора. При такой конструкции возможно подсоединение к обмотке ротора пускового или регулировочного реостата, позволяющего менять электрическое сопротивление в цепи ротора. Такие двигатели более сложны в изготовлении и эксплуатации, поэтому применяются только там, где применение АД с КЗР не обеспечит требованиям в приводу механизма.
Ротор АД отстаёт от вращающегося магнитного поля статора, которое создается обмоткой статора, то есть вращение происходит асинхронно. В этих условиях вращающееся поле статора индуцирует ЭДС в обмотке роторе, под действием которого в роторе протекает ток, который взаимодействует с вращающимся магнитным полем (ВМП), создавая вращающий момент двигателя. В рабочих режимах разница частот вращения статора и ротора не велика и составляет несколько процентов. При рассмотрение рабочих процессов АД обычно используют понятие скольжения
Скорость асинхронного двигателя в рабочих режимах
где синхронная частота вращения магнитного поля ; – частота питающего напряжения ; – число пар полюсов.
Статор синхронного двигателя (СД) конструктивно не отличается от статора АД. Ротор СД имеет явнополюсную конструкцию, на полюсах которого расположена обмотка возбуждения. При включении обмотки к источнику постоянного тока в двигателе создается дополнительное магнитное поле. Таким образом, для работы синхронного двигателя кроме 3х-фазного переменного напряжения требуется также постоянное. Исключение составляют двигатели, возбуждаемые постоянными магнитами. Такие двигатели обладают абсолютно жесткой механической характеристикой: ротор двигателя вращается синхронно с вращающимся магнитным полем с частотой .
В отличие от АД, синхронные не создают пускового момента, так как ротор двигателя по причине инерционности не может мгновенно разогнаться до синхронной скорости. Для пуска СД необходимо предварительно привести его во вращение до скорости, близкой к синхронной ( . С этой целью применяют асинхронный пуск, для чего на роторе двигателя располагается пусковая обмотка, конструктивно похожая на беличью клетку.
Процесс асинхронного пуска СД протекает следующим образом (рис. 4.2).
При включении обмотки статора СД в сеть СД запускается как асинхронный. При этом обмотку возбуждения замыкают на сопротивление для ограничения величины ЭДС, которая наводится в ОВ при пуске двигателя. При достижении скорости вращения близкой к номинальной, обмотку возбуждения подключают к постоянному напряжению, и двигатель втягивается в синхронизм, то есть скорость вращения двигателя становится равной синхронной скорости.
Синхронные двигатели изготавливаются на большие мощности: от сотен до тысяч киловатт. Объясняется это тем, что при меньших мощностях их применение нецелесообразно по технико-экономическим показателям.
СД обычно имеют целевое назначение, то есть каждая серия разработана для конкретных механизмов (для шаровых мельниц – СДМЗ, для привода компрессоров – СДК, для привода насосов – ВДС и др.).
Синхронные двигатели имеют перегрузочную способность .
Еще одной особенностью СД является возможность работать с величиной , более того, при перевозбуждении синхронный двигатель начинает генерировать емкостную нагрузку. Для повышении в сети используют синхронные компенсаторы, представляющие собой перевозбужденные СД специальной конструкции, работающие без нагрузки на валу.
В основу работы любых электродвигателей положен принцип электромагнитной индукции. Электродвигатель состоит из неподвижной части — статора (для асинхронных и синхронных движков переменного тока) либо индуктора (для движков постоянного тока) и подвижной части — ротора (для асинхронных и синхронных движков переменного тока) либо якоря (для движков постоянного тока). В роли индуктора на маломощных двигателях постоянного тока нередко используются постоянные магниты.
Все двигатели, грубо говоря можно поделить на два вида:
двигатели постоянного тока
двигатели переменного тока (асинхронные и синхронные)
Двигатели постоянного тока
По неким мнениям данный двигатель возможно еще назвать синхронной машиной постоянного тока с самосинхронизацией. Простой движок, являющийся машиной постоянного тока, состоит из постоянного магнита на индукторе (статоре), 1-го электромагнита с очевидно выраженными полюсами на якоре (двухзубцового якоря с явно выраженными полюсами и с одной обмоткой), щёточноколлекторного узла с 2-мя пластинами (ламелями) и 2-мя щётками.Простой двигатель имеет 2 положения ротора (2 “мёртвые точки”), из которых неосуществим самозапуск, и неравномерный крутящий момент. В первом приближении магнитное поле полюсов статора равномерное (однородное).
Данные двигатели с наличием щёточно-коллекторного узла бывают:
Колекторные – электрическое устройство, в котором датчиком положения ротора и переключателем тока в обмотках является одно и то же устройство — щёточно-коллекторный узел.
Бесколекторные – замкнутая электромеханическая система, состоящая из синхронного устройства с синусоидальным распределением магнитного поля в зазоре, датчика положения ротора, преобразователя координат и усилителя мощности. Более дорогой вариант в сравнение с колекторными двигателями.
Двигатели переменного тока
По типу работы данные двигатели делятся на синхронные и асинхронные двигатели. Принципное отличие заключается в том, что в синхронных машинах 1-ая гармоника магнитодвижущей силы статора перемещается со скоростью вращения ротора (по этому сам ротор крутится со скоростью вращения магнитного поля в статоре), а у асинхронных — есть и остается разница меж скоростью вращения ротора и скоростью вращения магнитного поля в статоре (поле крутится быстрее ротора).Синхронный – двигатель переменного тока, ротор которого крутится синхронно с магнитным полем питающего напряжения. Эти движки традиционно применяются при огромных мощностях (от сотен киловатт и выше).
Есть синхронные двигатели с дискретным угловым движением ротора — шаговые двигатели. У них данное положение ротора фиксируется подачей питания на соответствующие обмотки. Переход в другое положение исполняется путём снятия напряжения питания с одних обмоток и передачи его на другие обмотки двигателя.
Ещё один вид синхронных движков — вентильный реактивный эл-двигатель, питание обмоток которого складывается с помощью полупроводниковых элементов.
Асинхронный – двигатель переменного тока, в котором частота вращения ротора различается от частоты крутящего магнитного поля, творимого питающим напряжением, второе название асинхронных машин – индукционные обосновано тем, что ток в обмотке ротора индуцируется вертящимся полем статора. Асинхронные машины сейчас оформляют огромную часть электрических машин. В главном они используются в виде электродвигателей и считаются ключевыми преобразователями электрической энергии в механическую, причём в основном используются асинхронные движки с короткозамкнутым ротором
По количеству фаз двигатели бывают:
- однофазные
- двухфазные
- трехфазные
Самые популярные и шыроковостребованые двигатели которые применяются в производстве и бытовом хозяйстве:
Однофазный асинхронный двигатель с короткозамкнутым ротором
Однофазовый асинхронный движок имеет на статоре только 1 рабочую обмотку, на которую в ходе работы мотора подается переменный ток. Хотя для запуска мотора на его статоре есть и вспомогательная обмотка, которая краткосрочно подключается к сети через конденсатор либо индуктивность, или замыкается накоротко пусковыми контактами рубильника. Это нужно для создания исходного сдвига фаз, чтоб ротор начал крутиться, по другому пульсирующее магнитное поле статора не здвинуло б ротор с места.Ротор такового мотора, как и любого иного асинхронного мотора с короткозамкнутым ротором, являет из себя цилиндрический сердечник с залитыми алюминием пазами, с сразу отлитыми вентиляционными лопастями.
Таковой ротор именуется короткозамкнутым ротором. Однофазовые движки используются в маломощных устройствах, в том числе комнатные вентиляторы либо маленькие насосы.
Двухфазный асинхронный двигатель с короткозамкнутым ротором
Двухфазные асинхронные движки более эффективны при работе от однофазовой сети переменного тока. Они содержат на статоре две рабочие обмотки, находящиеся перпендикулярно, при этом одна из обмоток подключается к сети переменного тока напрямую, а вторая – через фазосдвигающий конденсатор, так выходит крутящееся магнитное поле, а вот без конденсатора ротор бы не двинулся с места.Данные двигатели помимо прочего имеют короткозамкнутый ротор, а их использование еще обширнее, нежели у однофазовых. Тут уже и стиральные машинки, и разные станки. Двухфазные движки для питания от однофазовых сетей называют конденсаторными двигателями, потому что фазосдвигающий конденсатор считается часто обязательной их частью.
Трехфазный асинхронный двигатель с короткозамкнутым ротором
Трехфазный асинхронный двигатель имеет на статоре три рабочие обмотки, сдвинутые сравнительно друг друга так, что при подключении в трехфазную сеть, их магнитные поля получаются смещенными в пространстве сравнительно друг дружку на 120 градусов. При включении трехфазного мотора к трехфазной сети переменного тока, появляется крутящееся магнитное поле, приводящее в перемещение короткозамкнутый ротор.Обмотки статора трехфазного мотора возможно соединить по схеме «звезда» либо «треугольник», при этом для питания мотора по схеме «звезда» потребуется напряжение выше, чем для схемы «треугольник», и на движке, потому, указываются 2 напряжения, к примеру: 127/220 либо 220/380. Трехфазные движки незаменимы для приведения в действие разных станков, лебедок, циркулярных пил, подъемных кранов, и т.п.
Трехфазный асинхронный двигатель с фазным ротором
Трехфазный асинхронный движок с фазным ротором имеет статор подобный описанным выше типам движков, шихтованный магнитопровод с 3-мя уложенными в его пазы обмотками, но в фазный ротор не залиты дюралевые стержни, а уложена уже настоящая трехфазная обмотка, в соединении «звезда». Концы звезды обмотки фазного ротора выведены на три контактных кольца, насаженных на вал ротора, и электрически отделенных от него.Посредством щеток, на кольца помимо прочего подается трехфазное переменное напряжение, и включение может быть осуществлено как впрямую, так и через реостаты. Непременно, движки с фазным ротором стоят подороже, хотя их пусковой момент под нагрузкой значительно повыше, нежели у типов движков с короткозамкнутым ротором. Именно в следствие завышенной силы и огромного пускового момента, данный вид движков отыскал использование в приводах лифтов и подъемных кранов, другими словами там, где прибор запускается под нагрузкой а не в холостую, как у двигателей с короткозамкнутым ротором.
В данной статье рассмотрим принципиальные отличия синхронных электродвигателей от асинхронных, чтобы каждый читающий эти строки мог бы эти различия четко понимать.
Более широко распространены сегодня, однако в некоторых ситуациях синхронные двигатели оказываются более подходящими, более эффективными для решения конкретных промышленных и производственных задач, об этом будет рассказано далее.
Прежде всего давайте вспомним, что же вообще такое электродвигатель. называется электрическая машина, предназначенная для преобразования электрической энергии в механическую энергию вращения ротора, и служащая в качестве привода для какого-нибудь механизма, например для приведения в действие подъемного крана или насоса.
Еще в школе всем рассказывали и показывали, как два магнита отталкиваются одноименными полюсами, а разноименными – притягиваются. Это . Но существуют и переменные магниты. Каждый помнит рисунок с проводящей рамкой, расположенной между полюсами подковообразного постоянного магнита.
Горизонтально расположенная рамка, если по ней пустить постоянный ток, станет поворачиваться в магнитном поле постоянного магнита под действием пары сил (), пока не будет достигнуто равновесие в вертикальном положении.
Если затем по рамке пустить постоянный ток противоположного направления, то рамка повернется дальше. В результате такого попеременного питания рамки постоянным током то одного, то другого направления, достигается непрерывное вращение рамки. Рамка здесь представляет собой аналог переменного магнита.
Приведенный пример с вращающейся рамкой в простейшей форме демонстрирует принцип работы синхронного электродвигателя. У любого синхронного электродвигателя на роторе есть обмотки возбуждения, на которые подается постоянный ток, формирующий магнитное поле ротора. Статор же синхронного электродвигателя содержит обмотку статора, для формирования магнитного поля статора.
При подаче на обмотку статора переменного тока, ротор придет во вращение с частотой, соответствующей частоте тока в обмотке статора. Частота вращения ротора будет синхронна частоте тока обмотки статора, поэтому такой электродвигатель называется синхронным. Магнитное поле ротора создается током, а не индуцируется полем статора, поэтому синхронный двигатель способен держать синхронные номинальные обороты независимо от мощности нагрузки, разумеется, в разумных пределах.
Асинхронный электродвигатель в свою очередь отличается от синхронного. Если вспомнить рисунок в рамкой, и рамку просто накоротко замкнуть, то при вращении магнита вокруг рамки, индуцируемый в рамке ток создаст магнитное поле рамки, и рамка будет стремиться догнать магнит.
Частота вращения рамки под механической нагрузкой будет всегда меньше частоты вращения магнита, и частота не будет поэтому синхронной. Этот простой пример демонстрирует принцип действия асинхронного электродвигателя.
В асинхронном электродвигателе вращающееся магнитное поле формируется переменным током обмотки статора, расположенной в его пазах. Ротор типичного асинхронного двигателя обмоток как таковых не имеет, вместо этого на нем расположены накоротко соединенные стержни (ротор типа «беличья клетка»), такой ротор называется короткозамкнутым ротором. Бывают еще асинхронные двигатели с фазным ротором, там ротор содержит обмотки, сопротивление и ток в которых можно регулировать реостатом.
Итак, в чем же принципиальное отличие асинхронного электродвигателя от синхронного? С виду внешне они похожи, порой даже специалист не отличит по внешним признакам синхронный электродвигатель от асинхронного. Главное же отличие заключается в устройстве роторов. Ротор асинхронного электродвигателя не питается током, а полюса на нем индуцирутся магнитным полем статора.
Ротор синхронного двигателя имеет обмотку возбуждения с независимым питанием. Статоры синхронного и асинхронного двигателя устроены одинаково, функция в каждом случае одна и та же – создание вращающегося магнитного поля статора.
Обороты асинхронного двигателя под нагрузкой всегда на величину скольжения отстают от вращения магнитного поля статора, в то время как обороты синхронного двигателя равны по частоте «оборотам» магнитного поля статора, поэтому если обороты должны быть постоянными при различных нагрузках, предпочтительней выбирать синхронный двигатель, например в приводе гильотинных ножниц лучше всего справится со своей задачей мощный синхронный двигатель.
Область применения асинхронных двигателей сегодня очень широка. Это всевозможные станки, транспортеры, вентиляторы, насосы, – все то оборудование, где нагрузка сравнительно стабильна, или снижение оборотов под нагрузкой не критично для рабочего процесса.
Некоторые компрессоры и насосы требуют постоянной частоты вращения при любой нагрузке, на такое оборудование ставят синхронные электродвигатели.
Синхронные двигатели дороже в производстве, чем асинхронные, поэтому если есть возможность выбора и небольшое снижение оборотов под нагрузкой не критично, приобретают асинхронный двигатель.
Синхронные электродвигатели широко применяются в электроприводах, не требующих регулирования частоты вращения. По сравнению с асинхронными двигателями они имеют ряд преимуществ:
более высокий коэффициент полезного действия;
возможность изготовления двигателей с низкой частотой вращения, что позволяет отказаться от промежуточных передач между двигателем и рабочей машиной;
частота вращения двигателя не зависит от нагрузки па его валу;
возможность использования в качестве компенсирующих устройств реактивной мощности.
Синхронные электродвигатели могут являться потребителями и генераторами . Характер и значение реактивной мощности синхронного двигателя зависят от величины тока в обмотке возбуждения. Зависимость тока в обмотке, выдающей напряжение в электрическую сеть, от тока возбуждения носит название U-образной характеристики синхронного двигателя. При 100%-ной нагрузке на валу двигателя его равен 1. При этом электродвигатель не потребляет реактивной мощности из электрической сети. Ток в обмотке статора при этом имеет минимальное значение.
Существуют различные виды электродвигателей, и очень часто возникает вопрос, в чем же отличия между синхронным и асинхронным двигателем. В асинхронном обмотки, расположенные в статоре, создают вращающееся магнитное поле, взаимодействующее с токами, образующимися в роторе, благодаря чему он приходит во вращающееся состояние. Поэтому, в настоящее время, наиболее популярным считается простой и надежный асинхронный электродвигатель, имеющий короткозамкнутый ротор.
Асинхронный двигатель
В его пазах расположены токопроводящие стержни из алюминия или меди, соединенные своими концами с кольцами из такого же материала, которые производят короткое замыкание этих стержней. Поэтому, ротор и называется короткозамкнутым. Вихревые токи, взаимодействующие с полем, вызывают вращение ротора со скоростью, меньшей, чем скорость вращения самого поля. Таким образом, весь двигатель получил название асинхронного. Это движение получило название относительного скольжения, поскольку скорости ротора и магнитного поля неравны и магнитное поле не пересекается с токопроводящими стержнями ротора. Поэтому, они не создают вращающийся момент.
Принципиальным отличием обоих видов двигателей является исполнение ротора. В синхронном он представляет собой постоянный магнит относительно небольшой мощности или такой же электромагнит. Вращающийся магнит, создающий статора, приводит в движение магнитный ротор. Скорость движения статора и ротора, в этом случае, одинаковая. Поэтому, данный двигатель получил название синхронного.
Особенности синхронного двигателя
Синхронный двигатель отличается возможностью значительного опережения током напряжения по фазе. Повышая коэффициент мощности по типу конденсаторных батарей.
Асинхронные электродвигатели отличаются простотой конструкции и надежностью в эксплуатации. Единственный недостаток этих агрегатов заключается в достаточной трудности регулировки частоты их вращения. асинхронные двигатели могут быть легко реверсированы, то есть вращение двигателя может измениться на противоположное направление. Для этого, достаточно изменить место расположения двух линейных проводов или фаз, которые замыкаются на обмотку статора. В отличие от синхронного, это простой и дешевый двигатель, применяющийся повсеместно.
Синхронный и асинхронный двигатель имеет еще и такое важное отличие, как постоянная частота вращения у первого при различных нагрузках. Поэтому их применяют в приводах машин, требующих постоянных скоростей, например, в компрессорах, насосах или вентиляторах, поскольку они очень легки в управлении.
Классификация электродвигателей
Электродвигатели можно разделить на две основные категории – синхронные и асинхронные (индукционные) двигатели. Эти два вида довольно сильно отличаются друг от друга. Разница уже видна в самих названиях. Отличить агрегаты можно по выбитому на шильдике количеству оборотов (если там не указан тип мотора), у ассинхронного мотора неокруглённое число (например, 950 об/мин), у синхронного округлённое (1000 об/мин).
Есть и другие важные различия, в этой статье мы рассмотрим наиболее показательные из них: конструктивные, рабочие и ценовые.
Любой двигатель состоит из двух элементов: неподвижного и вращающегося. Статор имеет осевые прорези – пазы, на дно которых укладываются токонесущие медные или алюминиевые проводки. У электродвигателя на валу крепится ротор с обмоткой возбуждения.
Принципиальным отличием между синхронными и асинхронными двигателями являются роторы, точнее, их исполнение.
У синхронных моделей при малых мощностях они представляют собой постоянные магниты.
Переменное напряжение подаётся на обмотку статора, ротор подключается к постоянному источнику питания. Проходящий по обмотке возбуждения постоянный ток наводит магнитное поле статора. Крутящий момент создаётся из-за угла запаздывания между полями. Ротор имеет такую же скорость, как и магнитное поле статора.
Агрегаты используются на практике и как генераторы и как двигатели.
Асинхронные модели – это достаточно недорогие двигатели, которые применяются часто и всюду. Они проще в конструктивном плане, несмотря на то, что неподвижные части в принципе у всех моторов похожи.
По обмотке статора пропускается переменный электроток, который взаимодействует с роторной обмоткой. Два поля вращаются с одинаковой скоростью в одном направлении, но не могут быть равными, иначе бы не создавалась индуцированная ЭДС и, тем более крутящийся момент. Это становится причиной возникновения индуцированного тока в обмотке роторе, направление которого согласно правилу Ленца таково, что он склонен противостоять причине своего производства, т. е. скорости скольжения.
Скорость вращения ротора не совпадает со скоростью магнитного поля, она всегда меньше. Таким образом, ротор пытается догнать скорость вращающегося магнитного поля и уменьшить относительную скорость.
Основные достоинства и недостатки
- Асинхронные агрегаты не требуют какого-либо дополнительного источника питания. Синхронным необходим дополнительный источник постоянного тока для подачи напряжения на обмотки.
- Синхронники обладают относительно невысокой чувствительностью к перепадам сетевого напряжения и стабильностью вращения вне зависимости от нагрузки.
- Индукционные двигатели не требуют наличия контактных колец, за исключением двигателей с фазным ротором, которые их имеют для плавного пуска или регулирования скорости. В синхронных двигателях больше уязвимых мест, так как используются контактные кольца со щетками. Следовательно, детали быстрее изнашиваются и контакт между ними ослабевает.
- Синхронники нуждаются во вспомогательных пусковых механизмах, так как не обладают функцией самопуска. Для индукционных электродвигателей, имеющих собственные пусковые моменты, такой механизм не требуется.
Какой агрегат лучше
В заключение нужно отметить, что говорить, якобы один мотор лучше другого, нельзя. Однако, асинхронные модели надежнее в эксплуатации, отличаются простотой конструкции. Если агрегаты не перегружать, то их длительным сроком службы пользователь может остаться довольным.
Однофазный электродвигатель 220в-принцип работы, устройство
Однофазная энергетическая система широко применяется по сравнению с трёхфазной для домашнего пользования, коммерческих целей и, в какой-то степени, для индустриальных задач. Однофазная система более экономична, энергетические же потребности в большинстве домов, офисов, магазинов весьма невелики. По этой причине однофазная система является очень подходящей в данном случае.
Однофазные электродвигатели просты по своей конструкции. Они недороги, прочны, их легко обслуживать и ремонтировать. Благодаря всем этим достоинствам, однофазный мотор нашёл применение в вентиляторах, пылесосах и т.д.
Данные моторы классифицируют так:
1. Однофазные индукционные двигатели или асинхронные двигатели.
2. Однофазные синхронные двигатели.
3. Коллекторные двигатели.
Устройство электродвигателя.
Как и любой электродвигатель, асинхронный мотор также имеет две главные составляющие. Этими компонентами являются ротор и статор.
Статор
Как можно догадаться из его названия, статор является стационарной частью индукционного мотора. На статор этого двигателя подаётся однофазный переменный ток.
Ротор
Ротор является вращающейся частью индукционного мотора. Ротор соединен с механической нагрузкой за счёт вала. Ротор в однофазном индукционном двигателе относится к типу роторов, который называют клетка для белки.
Конструкция данного электродвигателя почти такая же, как “клетка для белки” трёхфазного двигателя, за исключением того, что в асинхронном двигателе у статора две обмотки, по сравнению с одиночной обмоткой статора у трёхфазного индукционного мотора.
Про статор однофазного индукционного двигателя
Статор этого двигателя имеет многослойную штамповку для уменьшения потерь вихревого тока на его периферии. Слоты, предусмотренные на штамповке, предназначены для удерживания статора или основной обмотки. Для того чтобы уменьшить гистерезисные потери, штамповка сделана из кремнистой стали. Когда на обмотку статора подаётся однофазный переменный ток, образуется магнитное поле и двигатель вращается на скорости, которая несколько меньше синхронной скорости Ns, которая получается за счёт:Где,
f = частота подающегося напряжения,
P = нормально разомкнутые полюсы мотора.
Конструкция статора асинхронного мотора похожа на конструкцию трёхфазного индукционного двигателя за исключением двух отличий в области обмотки в однофазном индукционном моторе.
1. Во-первых, однофазные индукционные моторы в большинстве своём выпускаются с катушками, имеющими не перекрещивающиеся лобовые соединения. Количество оборотов на катушку может быть легко отрегулировано при помощи катушек с не перекрещивающимися лобовыми соединениями. Распределение магнитодвижущей силы почти синусоидально.
2. За исключением двигателя с экранированным полюсом, асинхронный мотор имеет две обмотки на статоре, а именно основную и вспомогательную. Данные обмотки размещены квадратурно по отношению друг к другу.
О роторе однофазного электродвигателя.
Устройство данной составляющей этого двигателя похоже на “клетку для белки” трёхфазного индукционного мотора. Ротор имеет форму цилиндра. У данной составляющей двигателя есть слоты по всей периферии. Слоты не параллельны по отношению друг к другу, но немного скошены, так как скашивание препятствует магнитной блокировке зубов статора и ротора и делает работу индукционного мотора более гладкой и тихой.Ротор в форме клетки для белки состоит из стержней. Эти стержни сделаны из одного из трёх металлов. Они могут быть алюминиевыми, могут быть медными, могут латунными. Данные стержни называют проводниками ротора, и они располагаются в слотах на периферии данной составляющей двигателя. Проводники перманентно замкнуты за счёт медных или алюминиевых колец, которые называют замыкающими кольцами. Для того чтобы обеспечивать механическую силу, эти проводники связаны с замыкающим кольцом, и следовательно, они формируют абсолютно замкнутую схему, напоминающую клетку. Поэтому эти двигатели и стали называть индукционными моторами-клетками для белки.
Так как стержни перманентно замкнуты при помощи замыкающих колец, электрическое сопротивление данной части мотора очень невелико, и нет возможности добавить внешнее сопротивление, поскольку стержни, как уже говорилось, перманентно замкнуты. Отсутствие контактного кольца и щёток делает устройство однофазного индукционного мотора очень простым и надёжным.
Принцип работы двигателя
ВНИМАНИЕ: Известно, что для действия любого мотора, который действует за счёт электроэнергии, будь-то мотор, использующий переменный ток или постоянный, нужно два магнитных потока. Взаимодействие между этими вот потоками обеспечивает требуемый крутящий момент, который является желаемым параметром для любого вращающегося мотора.
Когда на обмотку статора мотора приходит однофазный переменный ток, переменный ток начинает проходить через статор или основную обмотку. Этот переменный ток порождает переменный магнитный поток, который называют основным магнитным потоком.
Данный поток также соединен с проводниками ротора и следовательно, отрезает эти проводники. Согласно закону, установленному Фарадеем, об электромагнитной индукции, в роторе возникает электродвижущая сила. Поскольку схема ротора замкнута, электрический ток начинает поступать в ротор.
Этот ток зовётся электрическим током ротора. Данный ток производит собственный магнитный поток, который называют магнитным потоком ротора. Поскольку этот поток начинает производиться согласно принципу индукции, мотор, работающий на этом принципе, называется индукционным мотором. Теперь имеются два магнитных потока, один из них является основным, а другой называют магнитным потоком ротора. Эти два магнитных потока производят желаемый крутящий момент, который требуется мотору для вращения.
Почему данный мотор не является самозапускающимся?
Согласно теории, гласящей о двойном вращающемся поле, любое изменяющееся значение может быть поделено на 2 компонента. Каждый имеет магнитуду, равную половине максимальной магнитуды переменного значения. Оба данных компонента крутятся в противоположном направлении по отношению друг к другу. Например, магнитный поток, φ может быть разделён на 2 составляющие:
Каждый из этих компонентов вращается в противоположном направлении. Если один φm / 2 вращается по часовой стрелке, то другой φm / 2 вращается против. Когда однофазный переменный ток идёт на обмотку статора данного двигателя, он производит собственный магнитный поток магнитуды, φm.
В соответствии с теорией о двойном поле, которое вращается, этот переменный магнитный поток, φm разделён на 2 компонента магнитуды φm / 2. Каждый будет вращаться в противоположном направлении, с синхронной скоростью, Ns. Назовём эти 2 компонента магнитного потока как передний компонент потока, φf и задний компонент потока, φb.
Результат двух компонентов в любой момент даёт значение мгновенного магнитного потока статора в данный конкретный момент.
Теперь при старте, и передняя, и задняя составляющие магнитного потока точно являются противоположными. Также оба компонента магнитного потока равны по магнитуде. Поэтому они аннулируют друг друга, и поэтому получающийся крутящий момент у ротора на старте равен нулю. Поэтому такие вот двигатели не являются самозапускающимися.
Методы, которыми можно сделать данный электродвигатель самостартующим
Эти моторы не запускаются сами, потому что создаваемый магнитный поток статора является изменяющимся по характеру и при запуске 2 компонента этого потока аннулируют друг друга, и поэтому не появляется крутящего момента.
Решить эту проблему можно, если сделать магнитный поток статора потоком вращающегося типа, а не переменного типа, который вращается лишь в одну сторону. Тогда мотор станет самозапускающимся. Теперь, для того чтобы произвести это вращающееся магнитное поле, понадобится два переменных магнитных потока, имеющие угол фазы с некоторой разницей между ними.
Когда эти два потока взаимодействуют, они производят результирующий магнитный поток. Этот поток вращается по своей сути и вращается в пространстве только в одном направлении. Когда двигатель начнёт вращаться, дополнительный магнитный поток может быть удалён.
Мотор будет продолжать вращаться под воздействием только основного магнитного потока. В зависимости от методов превращения асинхронного электродвигателя в самозапускающийся мотор, существует в основном 4 типа однофазных индукционных моторов, а именно:
1. Индукционный электродвигатель с проскальзывающей фазой.
2. Ёмкостной электродвигатель со стартовым индуктором.
3. Емкостной индукционный электродвигатель со стартовым конденсатором.
4. Индукционный электродвигатель со экранированным полюсом.
5. Перманентный емкостной электродвигатель с проскальзыванием или ёмкостной мотор с одним значением.
Сравнение однофазных и трёхфазных индукционных электродвигателей
1. Однофазные электродвигатели надёжны, просты в устройстве, экономичны для маленькой мощности, если сравнивать с трёхфазными.
2. Электрический фактор мощности однофазных электродвигателей низок, если сравнить с трёхфазными.
3. Несмотря на одинаковые размеры, однофазные электродвигатели производят около 50% на выходе, тогда как трёхфазные – меньше.
4. Стартовый крутящий момент также низок для асинхронных моторов / однофазных индукционных моторов.
5. Эффективность однофазных электродвигателей меньше, чем у трёхфазных.
Однофазные индукционные электродвигатели просты, надёжны и дёшевы для маленьких мощностей. Они в целом доступны для мощности в 1 киловатт.
Пишите комментарии, дополнения к статье, может я что-то пропустил. Загляните на карту сайта, буду рад если вы найдете на моем сайте еще что-нибудь полезное.
Похожее
2-3-2. Принцип вращения асинхронного двигателя
Рис. 2.35 Силовой двигатель для промышленного использованияКак описано в главе 1, существует много типов двигателей с вращающимся магнитным полем.
В этой главе рассматриваются силовые двигатели, используемые на заводах (рис. 2.35), и асинхронные двигатели , широко используемые в домашних условиях для электрических вентиляторов и стиральных машин.
Вводная книга по двигателям объясняет принцип вращения асинхронного двигателя с использованием диска Arago (см.рис.2.42).
Ротор обычных асинхронных двигателей имеет конструкцию, показанную на рис. 2.36 (а). Если вы разберете ротор, вы увидите, что это не диск и что он состоит из пластины из кремнистой стали и алюминиевой детали в форме клетки, как показано на рис. 2.36 (b). Такой ротор называется короткозамкнутым ротором .
Использование диска Араго для объяснения принципа вращения двигателей, оснащенных короткозамкнутым ротором, неуместно. Это может быть лучше объяснено подходом, используемым для двигателей постоянного тока.
Рис. 2.36 Конструкция ротора с короткозамкнутым роторомКак показано на Рис. 2.37, замкнутая катушка помещена в магнитное поле, а внешний магнит вращается. Затем, как видно из принципа выработки энергии в двигателях постоянного тока, в катушке происходит выработка энергии, и через катушку протекает ток.
По мере протекания тока катушка создает крутящий момент, который взаимодействует с исходным магнитным полем, а затем катушка начинает вращаться.
Если увеличить количество витков, как показано на рис.2.38 можно заменить катушки на обойму.
А именно, обойма асинхронных двигателей соответствует обмотке двигателей постоянного тока.
Рис. 2.37 Принцип вращения асинхронных двигателей Рис. 2.38 Замена с короткозамкнутым роторомНиже приводится краткое описание принципа вращения асинхронных двигателей.
- <1> Вращение магнитного поля
- <2> Генерация индукционного тока
- <3> Возникновение силы при взаимодействии тока и магнитного поля
- <4> Вращение ротора
На реальных двигателях механизм последовательно возбуждает несколько катушек вместо перемещения магнитов для получения того же эффекта.Чтобы изменить возбуждение, необходимы две или несколько синусоид, сдвинутых во времени.
Обычно на заводах используются трехфазные 200 В переменного тока, сдвинутые на 120 градусов друг от друга (рис. 2.39).
Рис. 2.39 При использовании трехфазного переменного тока с фазами, смещенными друг от друга на 120 градусовПоскольку источник питания для домашнего использования однофазный 100 В переменного тока, мы должны создать, так или иначе, синусоидальную волну, смещенную от этого источника питания при использовании асинхронного двигателя. Один из методов – увеличить фазу тока катушки на 90 градусов с помощью конденсатора.Двигатель, работающий таким образом, называется однофазным двигателем с конденсаторным управлением.
Однофазный двигатель с конденсаторным питанием создает вращающееся магнитное поле с помощью набора из двух обмоток, одна из которых является главной обмоткой, которая подключена непосредственно к источнику питания, а другая – вспомогательной обмоткой, которая подключена к источнику питания через конденсатор. .
Конструкция конденсаторного двигателя показана на рис. 1.2 главы 1.
асинхронных двигателей переменного тока | Как работают электродвигатели переменного тока Асинхронные электродвигатели переменного тока
| Как работают двигатели переменного тока – объясните это РекламаКриса Вудфорда.Последнее изменение: 28 июня 2021 г.
Вы знаете, как работают электродвигатели? Ответ, наверное, да и нет! Хотя многие из нас узнали, как базовые моторные работы, из простых научных книг и веб-страниц, таких как эта, многие из моторы, которые мы используем каждый день – от заводских машин до электропоезда – вообще-то так не работают. Какие книги рассказывают нам о простых двигателях постоянного тока (DC), которые имеют петля из проволоки, вращающаяся между полюсами постоянного магнита; в реальной жизни, в большинстве двигателей большой мощности используется переменный ток (AC) и работают совершенно по-другому: это то, что мы называем индукцией двигатели, и они очень изобретательно используют вращающееся магнитное поле.Давайте познакомимся поближе!
Фотография: Обычный асинхронный двигатель переменного тока со снятыми корпусом и ротором, демонстрирующий медные обмотки катушек, составляющих статор (статическая, неподвижная часть двигателя). Эти катушки предназначены для создания вращающегося магнитного поля, которое вращает ротор (подвижную часть двигателя) в пространстве между ними. Фото Дэвида Парсонса любезно предоставлено Министерством энергетики США / NREL.
Как работает обычный двигатель постоянного тока?
Простые двигатели, которые вы видите в научных книгах, основаны на кусок проволоки, согнутый в прямоугольную петлю, которая подвешена между полюса магнита.(Физики назвали бы это проводник с током сидит в магнитном поле.) Когда вы подключаете такой провод к батарее, через него течет постоянный ток (DC), создавая вокруг него временное магнитное поле. Это временное поле отталкивает исходное поле от постоянного магнита, в результате чего провод перевернуть. Обычно провод останавливался в этой точке, а затем снова переворачивался, но если мы воспользуемся оригинальным вращающимся соединением называется коммутатором, мы можем сделать обратный ток каждый раз, когда проволока переворачивается, и это означает, что проволока будет продолжать вращаться в в том же направлении, пока течет ток.Это суть простого электродвигателя постоянного тока, задуманного в 1820-е годы Майкла Фарадея и превратился в практическое изобретение о десятилетие спустя Уильямом Стердженом. (Более подробную информацию вы найдете в нашей вводной статье об электродвигателях.)
Иллюстрации: Электродвигатель постоянного тока основан на проволочной петле, вращающейся внутри фиксированного магнитного поля, создаваемого постоянным магнитом. Коммутатор (разрезное кольцо) и щетки (угольные контакты к коммутатору) меняют направление электрического тока каждый раз, когда провод перекручивается, что позволяет ему вращаться в одном и том же направлении.
Прежде чем мы перейдем к двигателям переменного тока, давайте быстро резюмируйте, что здесь происходит. В двигателе постоянного тока магнит (и его магнитное поле) фиксируется на месте и образует внешнюю статическую часть двигатель (статор), в то время как катушка с проводом, несущая электрический ток формирует вращающуюся часть двигателя (ротор). Магнитное поле исходит от статора, который представляет собой постоянный магнит, пока вы подаете электроэнергию на катушку, которая составляет ротор. Взаимодействие между постоянными магнитами поле статора и временное магнитное поле, создаваемое ротором, равно что заставляет мотор крутиться.
Рекламные ссылкиКак работает двигатель переменного тока?
В отличие от игрушек и фонариков, большинство домов, офисов, фабрики и другие здания не питаются от маленьких батареек: на них подается не постоянный ток, а переменный ток (AC), который меняет направление примерно 50 раз в секунду. (с частотой 50 Гц). Если вы хотите запустить двигатель от электросети переменного тока в вашем доме, вместо батареи постоянного тока нужна другая конструкция двигателя.
В двигателе переменного тока есть кольцо электромагнитов. расположены снаружи (составляя статор), которые предназначены для создания вращающегося магнитного поля.Внутри статора находится цельная металлическая ось, проволочная петля, катушка, беличья клетка из металлических стержней и межсоединений (например, вращающиеся клетки, которым иногда удается развлечь мышей), или другая свободно вращающаяся металлическая деталь, которая может проводить электричество. В отличие от двигателя постоянного тока, где вы посылаете энергию во внутренний ротор, в двигателе переменного тока вы посылаете мощность на внешние катушки, которые составляют статор. Катушки запитываются попарно, последовательно, создавая магнитное поле, вращающееся вокруг двигателя.
Фото: Статор создает магнитное поле с помощью туго намотанных катушек из медной проволоки, которые известны как обмотки. Когда электродвигатель изнашивается или перегорает, можно заменить его другим электродвигателем. Иногда проще заменить обмотки двигателя новым проводом – это умелая работа, называемая перемоткой, что и происходит здесь. Фото Сета Скарлетта любезно предоставлено ВМС США.
Как это вращающееся поле заставляет двигатель двигаться? Помните, что ротор, подвешенный внутри магнитное поле, является электрическим проводником.Магнитное поле постоянно меняется (потому что оно вращается), поэтому согласно законам электромагнетизма (точнее, закону Фарадея), магнитное поле производит (или индуцирует, если использовать термин Фарадея) электрический ток внутри ротора. Если проводник представляет собой кольцо или провод, ток течет вокруг него по петле. Если проводник представляет собой просто цельный кусок металла, вместо этого вокруг него циркулируют вихревые токи. В любом случае индуцированный ток производит свое собственное магнитное поле и, согласно другому закону электромагнетизма (Закон Ленца) пытается остановить то, что вызывает его – вращающееся магнитное поле – в том числе вращающееся.(Вы можете думать о роторе отчаянно пытается «догнать» вращающееся магнитное поле, пытаясь устранить разница в движении между ними.) Электромагнитная индукция – это ключ к тому, почему такой двигатель вращается, и поэтому он называется асинхронным.
Фото: эффективный асинхронный двигатель переменного тока. Фото Аль-Пуэнте любезно предоставлено NREL.
Как работает асинхронный двигатель переменного тока?
Вот небольшая анимация, чтобы подвести итог и, надеюсь, прояснить все:
- Две пары катушек электромагнита, показанные здесь красным и синим цветом, поочередно запитываются источником переменного тока (не показан, но подключаются к выводам справа).Две красные катушки соединены последовательно и запитаны вместе, а две синие катушки катушки подключаются таким же образом. Поскольку это переменный ток, ток в каждой катушке не включается и не выключается внезапно (как предполагает эта анимация), а плавно повышается и падает в форме синусоидальной волны: когда красные катушки наиболее активны, синие катушки полностью неактивны, и наоборот. Другими словами, их токи не совпадают (не совпадают по фазе на 90 °).
- Когда катушки находятся под напряжением, магнитное поле, которое они создают между ними, индуцирует электрический ток в роторе.Этот ток создает собственное магнитное поле, которое пытается противодействовать тому, что его вызвало (магнитное поле от внешних катушек). Взаимодействие между двумя полями заставляет ротор вращаться.
- Когда магнитное поле чередуется между красной и синей катушками, оно эффективно вращается вокруг двигателя. Вращающееся магнитное поле заставляет ротор вращаться в одном направлении и (теоретически) почти с одинаковой скоростью.
Асинхронные двигатели на практике
Что управляет скоростью двигателя переменного тока?
Фотография: Двигатель с регулируемой частотой.Фото Уоррена Гретца любезно предоставлено NREL.
В синхронных двигателях переменного тока ротор вращается с той же скоростью, что и вращающееся магнитное поле; в асинхронном двигателе ротор всегда вращается с меньшей скоростью, чем поле, что делает его примером так называемого асинхронного двигателя переменного тока. Теоретическая скорость ротора в асинхронном двигателе зависит от частоты источника переменного тока и количества катушек, составляющих статор, и без нагрузки на двигатель приближается к скорости вращающегося магнитного поля.На практике нагрузка на двигатель (независимо от того, что он ведет) также играет роль, замедляя ротор. Чем больше нагрузка, тем больше «пробуксовка» между скоростью вращающегося магнитного поля и фактической скоростью ротора. Чтобы контролировать скорость двигателя переменного тока (чтобы он работал быстрее или медленнее), вы должны увеличивать или уменьшать частоту источника переменного тока, используя так называемый частотно-регулируемый привод. Поэтому, когда вы регулируете скорость чего-то вроде заводской машины, питаемой от асинхронного двигателя переменного тока, вы на самом деле управляете схемой, которая изменяет частоту тока, приводящего в движение двигатель, вверх или вниз.
Что такое «фаза» двигателя переменного тока?
Нам не обязательно приводить в движение ротор с четырьмя катушками (двумя противоположными парами), как показано здесь. Можно построить асинхронные двигатели с любым другим расположением катушек. Чем больше у вас катушек, тем плавнее будет работать мотор. Количество отдельных электрических токов, возбуждающих питание катушек независимо, вне шага, известно как фаза двигателя, поэтому конструкция, показанная выше, представляет собой двухфазный двигатель (с двумя токами, возбуждающими четыре катушки, которые работают не в шаге в двух парах. ).В трехфазном двигателе мы могли бы иметь три катушки, расположенные вокруг статора в виде треугольника, шесть равномерно расположенных катушек (три пары) или даже 12 катушек (три набора по четыре катушки) с одной, двумя или четырьмя катушками. включается и выключается одновременно тремя отдельными противофазными токами.
Анимация: Трехфазный двигатель, питаемый тремя токами (обозначенными красным, зеленым и синие пары катушек), сдвиг по фазе на 120 °.
Преимущества и недостатки асинхронных двигателей
Преимущества
Самым большим преимуществом асинхронных двигателей переменного тока является их простота.У них есть только одна движущаяся часть, ротор, что делает их недорогими, тихими, долговечными и относительно безотказными. ОКРУГ КОЛУМБИЯ двигатели, напротив, имеют коллектор и угольные щетки, которые изнашиваются. выходят и нуждаются в замене время от времени. Трение между щетками и Коммутатор также делает двигатели постоянного тока относительно шумными (а иногда даже довольно вонючими).
Иллюстрации: Электродвигатели чрезвычайно эффективны, обычно около 85 процентов поступающей электроэнергии преобразуются в полезную исходящую механическую работу.Даже в этом случае довольно много энергии теряется в виде тепла внутри обмоток, поэтому двигатели могут сильно нагреваться. Большинство двигателей переменного тока промышленной мощности имеют встроенные системы охлаждения. Внутри корпуса находится вентилятор, прикрепленный к валу ротора (на противоположном конце оси, который приводит в движение любую машину, к которой прикреплен двигатель), показанный здесь красным. Вентилятор всасывает воздух в двигатель, обдувая его внешнюю часть корпуса, минуя теплоотводящие ребра. Если вы когда-нибудь задумывались, почему электродвигатели имеют эти выступы снаружи (как вы можете видеть на верхнем фото на этой странице), причина в том, что они охлаждают двигатель.
Недостатки
Поскольку скорость асинхронного двигателя зависит от частоты переменного тока, который его возбуждает, он вращается со скоростью постоянная скорость, если вы не используете частотно-регулируемый привод; Скорость двигателей постоянного тока намного проще контролировать, просто повышая или понижая напряжение питания. Хотя асинхронные двигатели относительно просты, они могут быть довольно тяжелыми и громоздкими из-за их катушечной обмотки. В отличие от двигателей постоянного тока, они не могут работать от батарей или любого другого источника постоянного тока (например, солнечных батарей) без использования инвертора (устройства, которое преобразует постоянный ток в переменный).Это потому, что им нужно изменяющееся магнитное поле, чтобы вращать ротор.
Кто изобрел асинхронный двигатель?
Изображение: оригинальный дизайн Николы Теслы для асинхронного двигателя переменного тока. Он работает точно так же, как и на анимации выше, с двумя синими и двумя красными катушками, которые поочередно возбуждаются генератором справа. Это произведение искусства взято из оригинального патента Tesla, депонированного в Бюро по патентам и товарным знакам США, с которым вы можете ознакомиться в приведенных ниже ссылках.
Никола Тесла (1856–1943) был физиком. и плодовитый изобретатель, чей огромный вклад в науку и технику никогда не были полностью признаны. После того, как он приехал в Соединенные Штаты в возрасте 28 лет, он начал работал на известного пионера электротехники Томаса Эдисона. Но двое мужчин поссорились катастрофически и вскоре стали непримиримыми соперниками. Тесла твердо верил что переменный ток (AC) намного превосходил постоянный ток (DC), в то время как Эдисон думал обратное. Со своим партнером Джорджем Westinghouse, Тесла отстаивал AC, а Эдисон был полон решимости управлять миром на DC и придумал всевозможные рекламные трюки, чтобы доказать, что кондиционер слишком опасен для широкого использования (изобретение электрического стула, чтобы доказать, что переменный ток может быть смертельным, и даже ударил током слона Топси переменным током, чтобы показать, насколько это было смертельно опасно и жестоко).Битва между этими двумя очень разные взгляды на электроэнергию иногда называют Войной течений.
Несмотря на лучшие (или худшие) усилия Эдисона, Tesla победила, и теперь электричество переменного тока питает большую часть мира. Во многом именно поэтому многие электродвигатели, которые приводить в действие бытовую технику в наших домах, фабриках и офисах переменного тока асинхронные двигатели, работающие от вращающихся магнитных полей, которые Никола Тесла спроектировал его в 1880-х годах (его патент, проиллюстрированный здесь, был выдан в мае 1888 года).Итальянский физик по имени Галилео Феррарис независимо друг от друга придумал ту же идею примерно в то же время, но история обошлась с ним еще более жестоко, чем Тесла и его имя теперь почти забыты.
Рекламные ссылкиУзнать больше
На сайте
На других сайтах
Книги
Для читателей постарше
Для младших читателей
- Электроэнергия для молодых людей: забавные и легкие проекты «Сделай сам» Марка де Винка.Maker Media / O’Reilly, 2017. Отличное практическое введение в электричество, включая несколько занятий, связанных с созданием электродвигателей с нуля. Возраст 9–12 лет.
- Эксперименты с электродвигателем Эда Соби. Enslow, 2011. Это отличное общее введение в электродвигатели с большим количеством более широкого научного и технологического контекста. Однако по очевидным практическим соображениям и соображениям безопасности он ориентирован только на проекты с двигателями постоянного тока и лучше всего подходит для детей в возрасте от 11 до 14 лет.
- Сила и энергия Криса Вудфорда.Факты в файле, 2004. Одна из моих книг, рассказывающих об усилиях человека по использованию энергии с древних времен до наших дней. Возраст 10+.
- Никола Тесла: Разработчик электроэнергии Крис Вудфорд, в изобретателях и изобретениях, том 5. Нью-Йорк: Маршалл Кавендиш, 2008. Краткую биографию Теслы я написал несколько лет назад. На момент написания все это было доступно в Интернете по этой ссылке в Google Книгах. Возраст 9–12 лет.
Патенты
Patents предлагает более глубокие технические детали и собственные идеи изобретателя о своей работе.Вот очень небольшая подборка многих патентов США, касающихся асинхронных двигателей.
- Патент США 381 968: Электромагнитный двигатель Николы Тесла, 1 мая 1888 г. Оригинальный патент на асинхронный двигатель переменного тока.
- Патент США 2,959,721: Многофазные асинхронные двигатели, Томас Х. Бартон и др., Lancashire Dynamo & Crypto Ltd, 8 ноября 1960 г. Асинхронный двигатель с улучшенным контролем скорости.
- Патент США 4311932: Жидкостное охлаждение для асинхронных двигателей, Рэймонд Н. Олсон, Sundstrand Corporation, 19 января 1982 г.Эффективный метод жидкостного охлаждения двигателя без чрезмерного сопротивления жидкости вращающимся компонентам.
- Патент США 5,751,082: Асинхронный двигатель с высоким пусковым моментом. Автор: Umesh C. Gupta, Vickers, Inc., 12 мая 1998 г. Современный двигатель с высоким начальным крутящим моментом.
Пожалуйста, НЕ копируйте наши статьи в блоги и другие сайты
статей с этого сайта зарегистрированы в Бюро регистрации авторских прав США. Копирование или иное использование зарегистрированных работ без разрешения, удаление этого или других уведомлений об авторских правах и / или нарушение смежных прав может привести к серьезным гражданским или уголовным санкциям.
Авторские права на текст © Chris Woodford 2012, 2020. Все права защищены. Полное уведомление об авторских правах и условиях использования.
Следуйте за нами
Сохранить или поделиться этой страницей
Нажмите CTRL + D, чтобы добавить эту страницу в закладки на будущее, или расскажите об этом своим друзьям с помощью:
Цитируйте эту страницу
Вудфорд, Крис. (2012/2020) Асинхронные двигатели. Получено с https://www.explainthatstuff.com/induction-motors.html.[Доступ (укажите дату здесь)]
Больше на нашем сайте …
Вращающееся магнитное поле – обзор
6.6.2 Генератор самовозбуждающейся индукции
В предыдущих разделах мы подчеркивали, что вращающееся магнитное поле или возбуждение обеспечивается током намагничивания, получаемым от источника питания, поэтому казалось бы очевидным, что двигатель не мог генерировать, если не был обеспечен источник питания для обеспечения тока намагничивания. Тем не менее, можно заставить машину «самовозбуждаться», если условия подходящие, и, учитывая надежность двигателя с кожухом, это может сделать его привлекательным предложением, особенно для небольших изолированных установок.
В главе 5 мы видели, что когда асинхронный двигатель работает с нормальной скоростью, вращающееся магнитное поле, которое создает токи и крутящий момент на роторе, также индуцирует сбалансированные трехфазные наведенные ЭДС в обмотках статора, величина ЭДС ненамного меньше напряжения электросети. Итак, чтобы действовать как независимый генератор, мы хотим создать вращающееся магнитное поле без необходимости подключения к активному источнику напряжения.
Мы обсуждали аналогичный вопрос в главе 3 в связи с самовозбуждением шунта d.c. машина. Мы видели, что если после выключения машины в полюсах поля остается достаточно остаточного магнитного потока, то э.д.с. возникающий при вращении вала, мог начать подавать ток на обмотку возбуждения, тем самым увеличивая магнитный поток, дополнительно повышая ЭДС. и инициирование процесса положительной обратной связи (или начальной загрузки), который в конечном итоге стабилизировался характеристикой насыщения железа в магнитной цепи.
К счастью, то же самое может быть достигнуто с помощью изолированного асинхронного двигателя.Мы стремимся извлечь выгоду из остаточного магнетизма в железе ротора и, поворачивая ротор, генерировать начальное напряжение в статоре, чтобы запустить процесс. Э.д.с. индуцированный должен затем управлять током, чтобы усилить остаточное поле и способствовать положительной обратной связи для создания бегущего поля магнитного потока. В отличие от постоянного тока Однако асинхронный двигатель имеет только одну обмотку, которая обеспечивает функции возбуждения и преобразования энергии, поэтому, учитывая, что мы хотим довести напряжение на клеммах до его номинального уровня, прежде чем подключать любую электрическую нагрузку, которую мы планируем подавать, очевидно, что необходимо обеспечить замкнутый путь для потенциального тока возбуждения.Этот путь должен способствовать нарастанию тока намагничивания и, следовательно, напряжения на клеммах.
«Возбуждение» тока означает обеспечение пути с очень низким импедансом, так что небольшое напряжение вызывает большой ток, и поскольку мы имеем дело с переменным током. величин, мы, естественно, стремимся использовать явление резонанса, размещая набор конденсаторов параллельно (индуктивным) обмоткам машины, как показано на рис. 6.17.
Рис. 6.17. Самовозбуждающийся индукционный генератор. Нагрузка подключается только после того, как на статоре нарастает напряжение.
Реактивное сопротивление параллельной цепи, состоящей из чистой индуктивности ( L ) и емкости ( C ) на угловой частоте ω, определяется как X = ωL − 1ωC, поэтому на низких и высоких частотах реактивное сопротивление очень велико, но на так называемой резонансной частоте (ω0 = 1LC) реактивное сопротивление становится равным нулю. Здесь индуктивность – это намагничивающая индуктивность каждой фазы индукционной машины, а C – добавленная емкость, значение выбирается так, чтобы обеспечить резонанс на желаемой частоте генерации.Конечно, схема не идеальна из-за сопротивления обмоток, но, тем не менее, индуктивное реактивное сопротивление можно «отрегулировать» путем выбора емкости, оставляя контур циркуляции с очень низким сопротивлением. Следовательно, вращая ротор со скоростью, при которой желаемая частота создается остаточным магнетизмом (например, 1800 об / мин для 4-полюсного двигателя, генерирующего 60 Гц), начальная умеренная ЭДС. производит непропорционально высокий ток, и поток увеличивается до тех пор, пока не будет ограничен нелинейной характеристикой насыщения железной магнитной цепи.Затем мы получаем сбалансированные трехфазные напряжения на клеммах, и нагрузка может быть приложена путем включения переключателя S (рис. 6.17).
Приведенное выше описание дает только общую схему механизма самовозбуждения. Такая схема была бы удовлетворительной только для очень ограниченного диапазона приводимых скоростей и нагрузок, и на практике требуются дополнительные функции управления для изменения эффективной емкости (обычно с использованием управления симистором), чтобы поддерживать постоянным напряжение при нагрузке и / или скорость варьируется в широких пределах.
Двигатели Basic – Основные принципы – Асинхронные двигатели переменного тока – Часть 2
Асинхронные двигатели переменного токаТипы двигателей, наиболее часто используемых в вентиляторах Woods Air Movements, – это асинхронные двигатели переменного тока. Они могут работать напрямую от источника электроэнергии, они надежны, не требуют особого обслуживания и относительно невысоки.
В трехфазном асинхронном двигателе переменного тока катушки изолированного провода находятся в пазах статора, расположенных в корпусе.Эти катушки сконфигурированы для обеспечения набора электромагнитных полюсов для каждой из трех электрических фаз (U, V и W) при включении.
На рис. 1 показан двигатель, в котором катушки расположены так, чтобы обеспечивать пару полюсов для каждой фазы (обозначены как U1 и U2, V1 и V2, W1 и W2). Поскольку у каждой фазы два полюса, это описывается как двухполюсная конфигурация; если бы для каждой фазы было две пары полюсов, это была бы 4-полюсная конфигурация и так далее.
Когда катушки статора подключены к источнику переменного тока, электрический ток будет течь и создавать магнитное поле – катушки намотаны так, что полюса в каждой паре имеют противоположную полярность.
Рисунок 1. Циклическое вращающееся магнитное поле в трехфазном асинхронном двигателе переменного тока
Цикличность формы волны переменного тока приводит к тому, что магнитное поле вращается вокруг центральной оси статора с двумя северными и двумя южными полюсами одновременно. Скорость этого вращения определяется количеством пар полюсов и частотой электросети (50 Гц или 60 Гц – см. «Двигатели, основная часть первая»).
Если имеется одна пара полюсов, магнитное поле вращается один раз за электрический цикл; где две пары, магнитное поле вращается один раз за два цикла, а где есть три пары, оно вращается один раз за три цикла.
Основное уравнение для определения синхронной скорости выглядит следующим образом:
Синхронная скорость (об / мин) = 2 x Частота питания (Гц) x 60
Количество полюсов для каждой фазы
Итак, если бы двигатель на Рисунке 1 работал от источника питания 50 Гц, синхронная скорость была бы:
2 x 50 x 60 = 3000 об / мин
2
Таким образом, можно видеть, что чем больше число полюсов, тем медленнее будет синхронная скорость – таким образом, двигатель с 12 полюсами на фазу будет иметь синхронную скорость всего 500 об / мин.
РоторПомимо статора, наиболее важной частью асинхронного двигателя переменного тока является ротор. Он состоит из стержней ротора, обычно изготовленных из алюминия или меди, которые на концах соединены с кольцами из того же материала. Иногда это называют ротором «беличья клетка» (см. Рисунок 2).
Поскольку ротор расположен во вращающемся магнитном поле статора, образующиеся линии магнитного потока будут разрезать стержни ротора и индуцировать напряжение в роторе.Это, в свою очередь, приведет к протеканию электрического тока в стержнях ротора (обозначенных на рисунке 2 красными стрелками), который создаст собственное магнитное поле вокруг стержней ротора. Это магнитное поле взаимодействует с магнитным полем статора, создавая силу на стержнях ротора, заставляя ротор вращаться вокруг своей оси.
Рисунок 2. Ротор типа «беличья клетка»
Поскольку напряжение в стержнях ротора создается магнитным полем в статоре, прорезающим стержни ротора, если ротор вращается с синхронной скоростью, не будет относительного движения между стержнями ротора и магнитным полем статора, что приведет к на стержнях ротора не возникает напряжения.
Если к ротору приложена нагрузка, он начнет замедляться, и, следовательно, он начнет взаимодействовать с магнитным полем статора, и будет создаваться крутящий момент, как показано на рисунке 2. Это будет тот крутящий момент, который приводит в движение прилагаемую нагрузку. к ротору.
Синхронная скорость является функцией частоты электросети и конфигурации обмотки статора (количества полюсов). Разница между синхронной скоростью и скоростью ротора известна как скольжение; это выражается в процентах от синхронной скорости и может быть рассчитано по формуле:
Скольжение = Синхронная скорость – скорость ротора
Синхронная скорость
Конструкция ротораНа рис. 3 показана конструкция типичного ротора.Стержни ротора обычно содержатся в пазах в стальном сердечнике для усиления магнитного поля ротора. Стержни ротора обычно перекошены так, что они не совпадают с обмотками статора, что снижает электромагнитный шум и обеспечивает более плавную передачу крутящего момента.
Рисунок 3. Типовая конструкция ротора
Сердечник изготовлен из стальных пластин, уложенных друг на друга, в то время как стержни ротора и концевые кольца обычно создаются путем заливки расплавленного алюминия в матрицу или форму, которая окружает ламинированный пакет ротора.Этот расплавленный алюминий протекает через прорези в пакете ротора, образуя стержни ротора. Между стержнями ротора и стальным сердечником нет изоляции, так как индуцированное напряжение низкое.
Рисунок 4. Компоненты асинхронного двигателя переменного тока общего назначения
Однофазные асинхронные двигатели переменного токаСтатор, сконфигурированный для однофазного питания, не сможет инициировать вращение неподвижного ротора, потому что его магнитное поле просто переключается между полярностями.В результате требуется дополнительная обмотка для создания прогрессивно вращающегося магнитного поля. Эта вспомогательная обмотка подключена к однофазному источнику питания через конденсатор, так что форма ее волны напряжения может быть не в фазе с формой волны первичной обмотки.
Рисунок 5: Непрерывно вращающееся магнитное поле в однофазном асинхронном двигателе переменного тока, создаваемое вспомогательной обмоткой, подключенной к конденсатору
На рисунке 5 показано, как это создает непрерывно вращающееся магнитное поле, позволяющее индуцировать вращение.
НАЖМИТЕ ЗДЕСЬ, ЧТОБЫ ПРОЧИТАТЬ ЧАСТЬ 3Как работает асинхронный двигатель?
26 сентября 2019
Изобретение асинхронных двигателей навсегда изменило ход человеческой цивилизации. Этот двигатель столетней давности, изобретенный великим ученым Николой Тесла, является наиболее распространенным типом двигателей даже сегодня. Фактически, около 50 процентов мирового потребления электроэнергии приходится на асинхронные двигатели.Давайте перейдем к принципам работы асинхронных двигателей или, точнее, к гениальному мышлению Николы Теслы.
Детали асинхронного двигателя
Асинхронный двигатель состоит из 2 основных частей; Статор и ротор (рис: 1). Статор – это неподвижная часть, а ротор – это вращающаяся часть. Статор в основном представляет собой трехкатушечную обмотку, на которую подается трехфазный переменный ток. Ротор находится внутри статора. Между ротором и статором будет небольшой зазор, известный как воздушный зазор.Величина радиального зазора может варьироваться от 0,5 до 2 мм.
Рис. 1 Статор и ротор асинхронного двигателяКонструктивные детали статора
Статор изготавливается путем укладки тонких высокопроницаемых стальных пластин с прорезями внутри стального или чугунного каркаса. Расположение стальных пластин внутри рамы показано на следующем рисунке. Здесь показаны только некоторые из стальных пластин. Обмотка проходит через пазы статора.
Рис. 2 Детали конструкции статораВлияние трехфазного тока, проходящего через обмотку статора
Когда через обмотку проходит трехфазный переменный ток, происходит кое-что очень интересное.Он создает вращающееся магнитное поле (RMF). Как показано на рисунке ниже, создается магнитное поле, которое по своей природе вращается. RMF – важное понятие в электрических машинах. Мы увидим, как это происходит, в следующем разделе.
Рис. 3 Вращающееся магнитное поле создается в асинхронном двигателеКонцепция вращающегося магнитного поля (RMF)
Чтобы понять явление вращающегося магнитного поля, гораздо лучше рассмотреть упрощенную трехфазную обмотку всего с тремя катушками.Провод, по которому проходит ток, создает вокруг себя магнитное поле. Теперь для этого специального устройства магнитное поле, создаваемое трехфазным переменным током, будет таким, как показано в конкретный момент.
Рис. 4 Магнитное поле создается вокруг одиночного провода и упрощенной обмотки. Составляющие переменного тока изменяются со временем. Еще два примера показаны на следующем рисунке, где из-за изменения переменного тока магнитное поле также изменяется. Понятно, что магнитное поле просто принимает другую ориентацию, но его величина остается прежней.Из этих трех положений ясно, что это похоже на вращающееся магнитное поле однородной силы. Скорость вращения магнитного поля известна как синхронная скорость.
Рис. 5A Трехфазный переменный ток Рис. 5B Здесь проиллюстрирована концепция вращающегося магнитного поляВлияние RMF на замкнутый провод
Предположим, вы помещаете замкнутый проводник внутрь такого вращающегося магнитного поля. Поскольку магнитное поле колеблется, в контуре будет индуцироваться ЭДС в соответствии с законом Фарадея.E.M.F будет производить ток через петлю. Таким образом, ситуация стала такой, как если бы петля с током находилась в магнитном поле. Это создаст магнитную силу в петле в соответствии с законом Лоренца. Таким образом, петля начнет вращаться, это ясно показано на рис. 6.
Рис. 6 Влияние RMF на замкнутый проводникРабота асинхронного двигателя
Подобное явление также происходит внутри асинхронного двигателя. Здесь вместо простой петли используется нечто очень похожее на беличью клетку.Беличья клетка имеет стержни, которые закорочены концевыми кольцами.
Трехфазный переменный ток, проходящий через обмотку статора, создает вращающееся магнитное поле. Как и в предыдущем случае, ток будет индуцирован в стержнях беличьей клетки, и она начнет вращаться. Вы можете заметить изменение наведенного тока в стержнях с короткозамкнутым ротором. Это связано со скоростью изменения магнитного потока в одной паре беличьих стержней, которая отличается от другой из-за ее разной ориентации. Это изменение тока в полосе со временем будет меняться.
Рис. 7 RMF создает крутящий момент на роторе, как в случае с простой обмоткой. Вот почему используется название асинхронный двигатель, электричество индуцируется в роторе за счет магнитной индукции, а не прямого электрического соединения. Чтобы способствовать такой электромагнитной индукции, внутри ротора установлена пластина с изолированным железным сердечником.
Рис. 8 Тонкие слои железной пластины, которые упакованы в ротор Такие маленькие кусочки слоев железа обеспечивают минимальные потери на вихревые токи. Вы можете отметить одно большое преимущество трехфазных асинхронных двигателей, так как они по своей сути самозапускаются.
Также можно заметить, что стержни беличьей клетки наклонены к оси вращения или имеют перекос. Это необходимо для предотвращения колебаний крутящего момента. Если бы стержни были прямыми, то для передачи крутящего момента в паре стержней ротора на следующую пару был бы небольшой промежуток времени. Это вызовет колебания крутящего момента и вибрацию ротора. Обеспечивая перекос в стержнях ротора, прежде чем ослабнет крутящий момент в одной паре стержней, в действие вступит следующая пара. Таким образом предотвращается колебание крутящего момента.
Скорость вращения ротора и концепция скольжения
Здесь вы можете заметить, что и магнитное поле, и ротор вращаются. Но с какой скоростью будет вращаться ротор? Чтобы получить ответ на этот вопрос, рассмотрим разные случаи.
Рассмотрим случай, когда скорость ротора равна скорости магнитного поля. Ротор испытывает магнитное поле в относительной системе отсчета. Поскольку и магнитное поле, и ротор вращаются с одинаковой скоростью относительно ротора, магнитное поле является стационарным.Ротор будет находиться в постоянном магнитном поле, поэтому наведенных ЭДС и тока не будет. Это означает нулевое усилие на стержнях ротора, поэтому ротор будет постепенно замедляться. Но по мере замедления петли ротора будут испытывать изменяющееся магнитное поле, поэтому индуцированный ток и сила снова возрастут, и ротор будет ускоряться. Короче говоря, ротор никогда не сможет догнать скорость магнитного поля. Он вращается с определенной скоростью, которая немного меньше синхронной скорости.Разница в синхронной скорости и скорости ротора называется скольжением.
N
РОТОРSLIP = (N
S – N R ) / N SЗНАЧЕНИЕ СКОЛЬЖЕНИЯ = 2-6%
Рис. 9 Здесь проиллюстрирована концепция скольженияПередача энергии в двигателе
Вращательная механическая сила, полученная от ротора, передается через приводной вал. Короче говоря, в асинхронном двигателе электрическая энергия поступает через статор и выводится из двигателя, а механическое вращение передается от ротора.
Рис. 10 Передача мощности в двигателеНо между входом и выходом мощности будут многочисленные потери энергии, связанные с двигателем. К различным компонентам этих потерь относятся потери на трение, потери в меди, потери на вихревые токи и гистерезисные потери. Такие потери энергии во время работы двигателя рассеиваются в виде тепла, поэтому вентилятор на другом конце помогает охлаждать двигатель.
Рис. 11 Охлаждающий вентилятор используется для отвода тепла, выделяемого двигателемПочему асинхронные двигатели так популярны?
Теперь давайте поймем, почему асинхронные двигатели правят как в промышленном, так и в бытовом мире.Вы можете отметить, что асинхронные двигатели не требуют постоянного магнита. У них даже нет щеток, колец коммутатора или датчика положения, как у других аналогов электрических машин. Асинхронные двигатели также запускаются самостоятельно. Наиболее важным преимуществом является то, что скорость асинхронного двигателя можно легко контролировать, регулируя входную частоту питания.
Чтобы понять это правильно, давайте еще раз рассмотрим простую схему расположения катушек. Мы узнали, что вращающееся магнитное поле создается из-за трехфазной входной мощности.Совершенно ясно, что скорость RMF пропорциональна частоте входной мощности. Поскольку ротор всегда пытается догнать RMF, скорость ротора также пропорциональна частоте мощности переменного тока.
N
S ∝ fТаким образом, используя частотно-регулируемый привод, можно очень легко управлять скоростью асинхронного двигателя. Это свойство асинхронных двигателей делает их привлекательным выбором для лифтов, кранов и электромобилей. Благодаря высокоскоростному диапазону асинхронных двигателей электромобили могут работать с односкоростной коробкой передач.
Рис. 12 Односкоростная трансмиссия Рис. 13 Контуры КПД асинхронного двигателяЕще одно интересное свойство асинхронного двигателя состоит в том, что когда ротор приводится в движение первичным двигателем, он также может действовать как генератор. В этом случае вы должны убедиться, что скорость RMF всегда меньше скорости ротора.
Рис. 14 Скорость RMF всегда меньше скорости ротораМы полагаем, что теперь вы получили четкое представление об оригинальных принципах работы асинхронного двигателя, а также о том, почему он по-прежнему доминирует в бытовом и промышленном мире.
ОБ АВТОРЕ
Сабин Мэтью, аспирант ИИТ Дели по специальности машиностроение. Основатель Lesics Engineers Pvt Ltd и YouTube-канала LESICS. Он дает качественное инженерное образование на своем канале в YouTube. А «ЛЕСИКС» охватывает огромное количество инженерных тем. Сабин очень увлечен пониманием физики сложных технологий и их объяснением простыми словами. Чтобы узнать больше об авторе, перейдите по этой ссылке
Типы и удивительные области применения асинхронных двигателей
Индукционные машины – это наиболее часто используемый тип двигателей в жилых, коммерческих и промышленных помещениях.В асинхронном двигателе электрический ток в роторе, необходимый для создания крутящего момента, получается за счет электромагнитной индукции от вращающегося магнитного поля обмотки статора.
Princy A. J | 4 июня 2020 г.
Асинхронный двигатель – это обычно используемый электродвигатель переменного тока. В асинхронном двигателе электрический ток в роторе, необходимый для создания крутящего момента, получается за счет электромагнитной индукции от вращающегося магнитного поля обмотки статора.Ротор асинхронного двигателя может быть ротором с короткозамкнутым ротором или ротором с намоткой.
Асинхронные двигатели, используемые в различных приложениях, также называются асинхронными двигателями. Это связано с тем, что асинхронный двигатель всегда работает с меньшей скоростью, чем синхронная скорость. Скорость вращающегося магнитного поля в статоре называется синхронной скоростью.
Индукционные машины являются наиболее часто используемым типом двигателей в жилых, коммерческих и промышленных помещениях. Эти трехфазные двигатели переменного тока обладают следующими характеристиками:
- Простая и грубая конструкция
- Доступное и низкое обслуживание
- Высокая надежность и профессионализм
- Нет необходимости в дополнительном пусковом двигателе и необходимости в синхронизации
Два типа асинхронных двигателей
Однофазный асинхронный двигатель
Однофазный асинхронный двигатель не запускается самостоятельно.Основная обмотка пропускает спорадический ток, когда двигатель подключен к однофазному источнику питания. Вполне логично, что самый дешевый, самый дешевый механизм сортировки должен использоваться наиболее регулярно. В зависимости от способа запуска эти машины делятся на разные категории. К этим типам относятся двигатели с экранированными полюсами, с расщепленной фазой и конденсаторные двигатели. Кроме того, конденсаторные двигатели запускаются с помощью конденсатора, работают с конденсатором и имеют двигатели с постоянным конденсатором.
В этих однофазных двигателях пусковая обмотка может иметь последовательный конденсатор и центробежный выключатель.Когда подается напряжение питания, ток в основной обмотке удерживает напряжение питания из-за полного сопротивления основной обмотки. И ток в пусковой обмотке опережает / отстает, напряжение питания зависит от импеданса пускового механизма. Угол между двумя обмотками равен разности фаз, достаточной для создания вращающегося магнитного поля для создания пускового момента. В момент, когда двигатель достигает от 70% до 80% синхронной скорости, центробежный переключатель на валу двигателя размыкается и отключает пусковую обмотку.
Применение однофазных асинхронных двигателей
Однофазные асинхронные двигатели используются в системах с малой мощностью. Эти двигатели широко используются в быту и промышленности. Некоторые из приложений упомянуты ниже:
- Насосы
- Компрессоры
- Малые вентиляторы
- Миксеры
- Игрушки
- Пылесосы скоростные
- Электробритвы
- Станки сверлильные
Трехфазный асинхронный двигатель:
Трехфазные асинхронные двигатели, будучи самозапускающимися, не имеют пусковой обмотки, центробежного переключателя, конденсатора или другого пускового устройства.Трехфазные асинхронные двигатели переменного тока находят различное применение в коммерческих и промышленных приложениях. Два типа трехфазных асинхронных двигателей – это двигатели с короткозамкнутым ротором и с контактным кольцом. Особенности, которые делают двигатели с короткозамкнутым ротором широко распространенными, заключаются в основном в их простой конструкции и прочной конструкции. С внешними резисторами двигатели с контактным кольцом могут иметь высокий пусковой момент.
Трехфазные асинхронные двигатели широко используются в бытовых и промышленных приборах, поскольку они имеют прочную конструкцию, не требуют технического обслуживания, сравнительно дешевле и требуют питания только на статоре.
Применение трехфазного асинхронного двигателя
- Подъемники
- Краны
- Подъемники
- Вытяжные вентиляторы большой мощности
- Станки токарные приводные
- Дробилки
- Маслоэкстракционные заводы
- Текстиль и др.
Вращающееся магнитное поле в асинхронном двигателе
Асинхронный двигатель вращается за счет вращающегося магнитного поля в асинхронном двигателе , которое создается обмоткой статора в воздушном зазоре между статором и ротором.Статор имеет трехфазную неподвижную обмотку, которая может быть соединена звездой или треугольником.
Когда источник переменного тока подключен к обмоткам статора, линейные токи I R , I Y и I B начинают течь. Эти линейные токи имеют разность фаз 120 o относительно друг друга. Из-за каждого линейного тока в воздушном зазоре создается синусоидальный поток. Эти потоки имеют ту же частоту, что и линейные токи, и они также имеют одинаковую разность фаз 120 o относительно друг друга.
Пусть поток, создаваемый линейными токами I R , I B , I Y , равен φ R , φ B , φ Y соответственно.
Математически они представлены следующим образом:
φ R = φ м sin ωt = φ м sin θ
φ B = φ м sin (ωt – 120 o ) = φ м sin (θ – 120 o )
φ Y = φ м sin (ωt – 240 o ) = φ м sin (θ – 240 o )
Эффективный или полный поток ( T ) в воздушном зазоре равен векторной сумме трех составляющих потоков ɸ R , ɸ Y и ɸ B .
Следовательно, T = ɸ R + ɸ Y + ɸ B
Докажите, что RMF в асинхронном двигателе вращается
Чтобы доказать, что этот RMF вращается, мы:
Шаг 1 : Мы найдем значения общего потока ɸ T для различных значений θ, таких как 0, 60, 120, 180… .. 360 o .
Шаг 2 : Для каждого значения θ на шаге 1 мы нарисуем векторные диаграммы.
Наблюдая за этими векторными биграммами, вы легко поймете, что ɸ T постоянно меняет свое положение с 90 o на 30 o на – 30 o на – 90 o и так далее.Другими словами, ɸ T вращается по часовой стрелке.
Мы будем использовать вектор ɸ R в качестве опорного вектора, т.е. все углы нарисованы относительно этого вектора.
ɸ
T при θ = 0 oɸ
T при θ = 60 oɸ
T при θ = 120 oɸ
T при θ = 180 o Аналогичным образом мы можем доказать, что ɸ T при θ = 180 o равно,
ɸ T = 1.5ɸ м ∠ – 90 o
Векторная диаграмма для θ = 180 o показана на рисунке (d).
Магнитное поле в трехфазном асинхронном двигателе (RMF) вращается с постоянной скоростью, называемой синхронной скоростью (Нс) , которая определяется выражением,
Н S = 120f 1 / P об / мин
, где f 1 = Частота питания статора
P = Число полюсов двигателя.
Направление вращающегося магнитного поля
Направление вращающегося магнитного поля зависит от последовательности фаз источника переменного тока, подключенного к обмотке статора.Если мы поменяем местами любые две фазы источника переменного тока, мы получим новую последовательность фаз, тогда направление вращающегося магнитного поля в трехфазном асинхронном двигателе изменится на противоположное. Он начнет вращаться в обратном направлении, как и ротор.
Поскольку статор и его обмотка трехфазного асинхронного двигателя такие же, как и у синхронного двигателя.
