
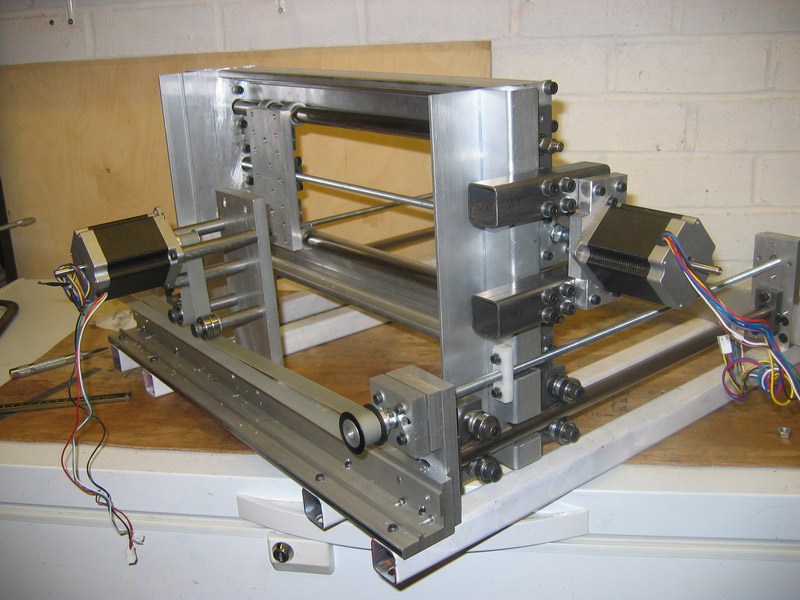
При конструировании очередного станка с ЧПУ, а попросту 3-х осевого фрезерного-сверлильного станочка для печатных плат и мелких фрезерных работ, у меня появилось неугомонное желание разложить всё «по полочкам».
Многие скажут, что тема не нова, существует множество проектов, множество технических и программных решений. Но, плавая в этом море информации, я постарался убрать всю «воду» и получить «сухой остаток».
Вот что из этого получилось…
Содержание / Contents
Сразу оговорюсь — все, что здесь далее написано, лишь мои личные выводы и не претендует на абсолютную истину. Истина рождается в споре, так что если уважаемые читатели в чем-то со мной не согласны, давайте это обсудим!Задача построения станка обычно сводится к трем подзадачам — механика, электроника, программное обеспечение. Видимо и статьи придется писать тоже три.
О передаче…
Для фрезерного станка, где есть боковые усилия резания материала, желательно не применять ременные передачи, очень популярные в 3D принтерах. Буду применять передачу «винт-гайка». Самая бюджетная передача — обычный стальной винт и безлюфтовая, желательно бронзовая, гайка. Более правильная — винт с трапециевидной резьбой и гайка из капролона. Самая хорошая (и, увы, самая дорогая) шарико-винтовая пара, или ШВП. Об этом подробнее я еще расскажу далее…
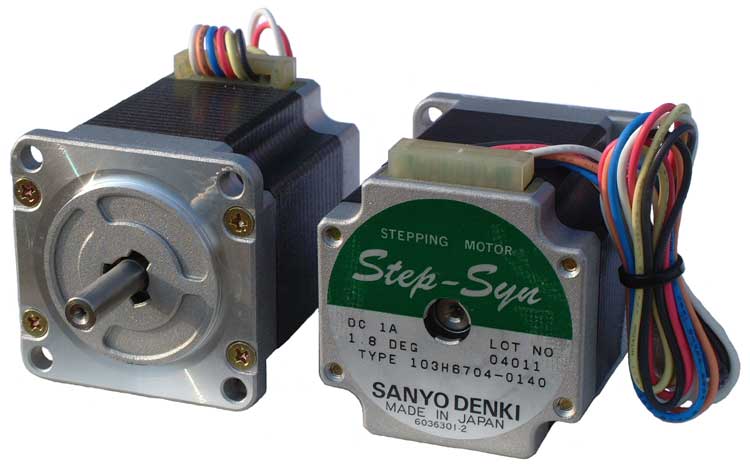
У каждой передачи есть свой коэффициент, свой шаг — то есть насколько линейно по оси переместится фрезер за один оборот двигателя, например, на 4 мм. В качестве двигателя для привода определил шаговый двигатель (ШД)
Почему шаговый? Что это вообще такое?
Двигатели есть переменного и постоянного тока, коллекторные и бесколлекторные, и так называемые «шаговые». В любом случае нам надо обеспечить какую-то точность позиционирования, например 0,01 мм. Как это сделать? Если двигатель имеет прямой привод — вал двигателя соединяют напрямую с винтом, то для обеспечения такой точности нужно повернуть его на некоторый угол. В данном случае, при шаге передачи 4 мм и желаемой точности перемещения 0,01 мм это… всего 1/400 оборота, или 360/400=0,9 градуса! Ерунда, возьмем обычный моторчик…
С «обычным» моторчиком без обратной связи никак не получится. Не вдаваясь в подробности, схема управления двигателем должна «знать», на какой угол повернулась ось. Можно конечно поставить редуктор — потеряем в скорости, и все равно без гарантии, без обратной связи вообще никак! На ось ставится датчик угла поворота. Такое решение надежное, но дорогое.
Альтернатива — шаговый двигатель (как он работает, почитайте сами). Можно считать, что за одну «команду» он повернет свою ось на определенный градус, обычно это 1,8 или 0,9 градуса (точность обычно не хуже 5%) — как раз то, что нужно. Недостаток такого решения — при большой нагрузке двигатель будет пропускать команды — «шаги» и может вообще остановиться. Вопрос решается установкой заведомо мощного двигателя. На шаговых двигателях и делается большинство любительских станочков.
Противоречивые требования. Малый ток — значит большое сопротивление, значит много витков провода обмотки двигателя, значит большая индуктивность. А большой момент — это большой ток и много витков. Выбираем в пользу большего тока и меньшей индуктивности. А момент надо выбирать исходя из нагрузки, но об этом потом.
Характеристики некоторых двигателей приведены в таблице:
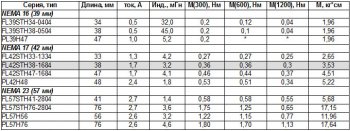
Для небольшого станка с рабочим пространством размером 300×300х100 мм и легким фрезером вполне сгодятся двигатели с крутящим моментом 0,3Нм и выше. Оптимальным является ток от 1,5 до 2,5 Ампер, вполне подойдет FL42STh48-1684 Двигатель есть. Теперь нужен драйвер — переключать напряжение на обмотках двигателя определенным образом, при этом не превышая установленный ток.
Самое простое решение — источник заданного тока и две пары транзисторных ключей на каждую обмотку. И четыре защитных диода. И логическая схема чтобы менять направление. И… Такое решение обычно делают на микросхеме ULN2003A для двигателей с малым током, имеет много недостатков, не буду на них останавливаться.
Альтернатива — специализированные микросхемы «всё в одном» — с логикой, транзисторами и диодами защиты внутри (или снаружи). А еще такие микросхемы контролируют ток обмоток и регулируют его с помощью ШИМ-а, а так же могут реализовывать режим «полушаг», а некоторые режимы 1/4 шага, и 1/8 шага и т. д. Эти режимы позволяют повысить точность позиционирования, повысить плавность движения и снизить резонанс. Обычно достаточно режима «полушаг», что позволит повысить теоретическую точность линейного позиционирования (в моем примере до 0,005 мм).
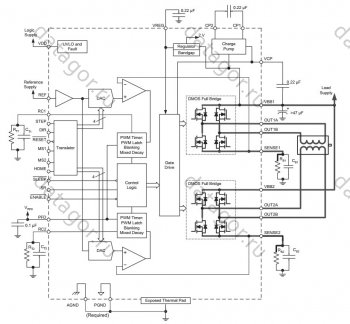
Что внутри микросхемы драйвера шагового двигателя? Блок логики и управления, источники питания, ШИМ со схемами формирования момента и времени коммутации обмоток, выходные ключи на полевых транзисторах, компараторы обратной связи — ток контролируется по падению напряжения на резисторах (Rs) в цепи питания обмоток. Ток двигателя задается опорным напряжением.
Для реализации этих функций существуют и другие схемные решения, например, с использованием микроконтроллеров PIC или ATMEGA (опять же с внешними транзисторами и защитными диодами). На мой взгляд, они не обладают значительным преимуществом перед «готовыми» микросхемами и я их в данном проекте использовать не буду.
На сегодняшний день есть достаточно много различных микросхем и достаточно много уже готовых плат и модулей драйверов ШД. Можно купить готовый, а можно «изобретать велосипед», тут каждый решает по-своему.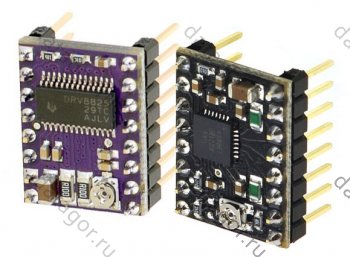
Из готовых — наиболее распространённые и недорогие драйверы на микросхемах Allegro A4988 (до 2А), Texas Instruments DRV8825 (до 2,5А).
Поскольку модули изначально разрабатывались для использования в 3D принтерах типа Rep-rap проекта Arduino, они не являются законченными модулями (например, им нужно еще питание логики (+5V), которое подается с так называемой рампы (Ramp).
Еще есть решения на DRV8811 (до 1,9 А), A3982 (до 2 А), A3977 (до 2,5 А), DRV8818 (до 2,5 А) DRV8825 (до 2,5 А), Toshiba TB6560 (до 3 А) и другие.
Поскольку мне интересно что-то сделать самому, плюс появилась возможность «попробовать на вкус» микросхемы Allegro A3982 и A3977, решил сделать пару драйверов самостоятельно.
Готовые решения на A4988 не понравились, прежде всего, из-за миниатюризации размеров печатной платы в ущерб хорошему охлаждению. Типовое сопротивление открытых транзисторов у A4388 при токе 1,5А 0,32+0,43 Ом, плюс 0,1-0,22 Ома «измерительный» резистор — получается около 0,85 Ом. А таких каналов два, и хотя и работают они импульсно, но 2-3 Ватта тепла надо рассеивать. Ну не верю я в многослойную плату и малюсенький радиатор охлаждения — в даташите нарисована плата гораздо больших размеров.
Провода мотора нужно сделать короткими, драйвер устанавливать рядом с двигателем. Существует 2 технических решения в звукотехнике: длинный сигнальный кабель к усилителю + короткие провода к акустической системе, или короткий сигнальный кабель к усилителю + длинные провода, а акустической системе. Оба решения имеют свои плюсы и минусы. С моторами — так же. Я выбрал длинные провода управления и короткие провода к мотору.
Управляющие сигналы — «шаг» (step), «направление» (dir), «включение» (enable), индикация состояния сигналов управления. Некоторые схемы не используют сигнал «Enable», но это приводит в режиме простоя к ненужному нагреву и микросхемы и двигателя.
Одно питание 12-24 вольта, источник питания логики (+5B) — на плате. Размеры платы — достаточные для хорошего охлаждения, двухсторонняя печать с большой областью «меди», возможность приклеить на микросхему радиатор (применяемой для охлаждения памяти видеокарт).
Основные характеристики и блок-схема: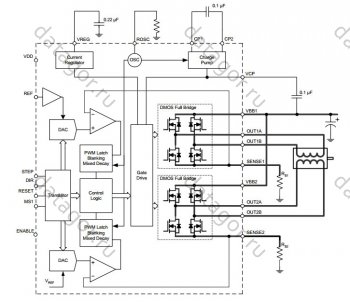
Напряжение питание силовое: 8…35 В Напряжение питание логики: 3,3…5 В Выходной ток (максимальный, зависит от режима и охлаждения): ±2 А Типовое сопротивление открытых транзисторов (при токе 1,5А): 0,33+0,37 ОмОсновные характеристики и блок-схема:
Напряжение питание силовое: 8…35 В Напряжение питание логики: 3,3…5 В Выходной ток (максимальный, зависит от режима и охлаждения): ±2,5 А Типовое сопротивление открытых транзисторов (при токе 2,5А): 0,33+0,45 Ом

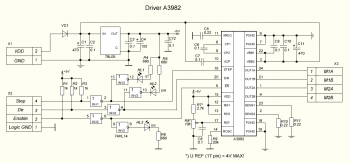
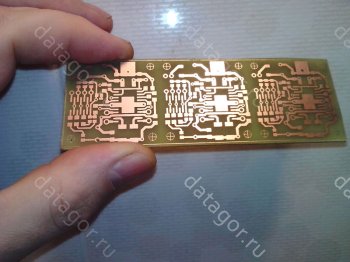
Проектировал в среде DipTrace. Драйвер A3982 включен по схеме из документации производителя. Включен режим «полушаг». Дополнительно для надежной работы сигналов управления и индикации применил микросхему логики 74НС14 (с триггерами Шмитта). Можно было сделать гальвано-развязку на оптронах, но для маленького станка я решил ее не делать. Схема на A3977 отличается только дополнительными джамперами режима шага и более мощным разъемом питания, пока в «железе» не реализована.Процесс изготовления — ЛУТ, двухсторонняя. Габариты 37×37 мм, крепеж — как у двигателей, 31×31 мм.
Для сравнения — слева мое творчество, справа драйвер на A4988.
 Все заработало сразу, наладки не требовалось.
Все заработало сразу, наладки не требовалось. 
Температуру корпуса микросхемы мерил пирометром — без радиатора она достигала 90-95 градусов (при токе обмоток 1,6А) — мне это не понравилось. С радиатором — 55-60 градусов — куда лучше! Вообще плата вся теплая — около 35 градусов.
Спасибо за внимание!
Продолжение следует…
▼ Файловый сервис недоступен. Зарегистрируйтесь или авторизуйтесь на сайте.
Даташит на микросхему Allegro A3982
▼ Файловый сервис недоступен. Зарегистрируйтесь или авторизуйтесь на сайте.
Камрад, рассмотри датагорские рекомендации

Антон (basilevscom)
Россия, Санкт-Петербург
О себе автор ничего не сообщил.
Откуда «ножки» растут
В настоящее время стали доступны и приобрели популярность различные станки с программным управлением. Это лазерные и фрезерные резчики и гравёры. А так же 3D принтеры. Все эти станки имеют один общий узел — шаговый двигатель.
И этому двигателю нужен драйвер.
Принцип работы двигателя не является предметом этой статьи. Мы рассмотрим только драйвер. Всё, что нам нужно знать в данном контексте — это какие управляющие сигналы нам нужно формировать для управления шаговым двигателем. Оказывается, это самые обычные прямоугольные импульсы.
Существует некоторое количество решений драйверов от различных компаний. В нашей статье мы рассмотрим самое доступное решение драйвера L9110 и его аналог HG7881 Это решение часто используется в Arduino
Теория и практика
Я решил применить микросхему L9110 в своём проекте.
Довольно легко нагуглил datasheet. Прочитал. Всё предельно понятно. Характеристики, распиновка, таблица истинности… По всем параметрам драйвер, вроде бы подходит. Напряжение коммутации — 12 вольт, выходной ток 800 ма. — всего хватает.
А что на деле?
Не откладывая в «долгий ящик» я сделал плату, написал и запустил тестовую программу…
Первое, на что я обратил внимание в своём устройстве — то, что микросхема драйвера сильно греется. Внимание! НА ХОЛОСТОМ ХОДУ. Без нагрузки. Это что за чудеса схемотехники?
Может у меня микросхема бракованная?
Пришла в голову идея рассмотреть сей девайс поподробнее. И не один, а кучу.
Сказано — сделано.
Хорошо, что у меня была припасена панелька SO-8 и плата для моделирования.
Ну, и контроллер на базе STM32.
Собран стенд и произведены измерения.
Да, кстати, кроме непосредственно, силового узла в микросхеме заложена логика исключающее ИЛИ. В даташите это описано.
Поскольку я изучаю эффект нагрева микросхемы, лучше не ограничиваться логическими единицами и нулями, а снять реальные напряжения.
В результате измерений получилась табличка:
Рассмотрим строчки 2 и 3. Что мы здесь видим?
- Падение напряжения на выходных транзисторах, при наличии нагрузки, около полутора вольт, что при токе 0,33 ампера даёт 0,5 ватт на канал.
- На холостом ходу микросхема потребляет 0,05 А, что при напряжении 12 В даёт 0,6 ватт на канал.
Другими словами, независимо от нагрузки она потребляет около 0,5 Вт на канал. Теперь понятно, почему я об неё обжигал пальцы.
Сильный нагрев — это, конечно недостаток. Но может свою функцию микросхема выполняет хорошо? Тут пригодился недавно подаренный себе 4-х лучевой осциллограф приставка. Не ожидал, что мне так скоро потребуются все 4 луча. Для тестирования написал простенькую программку на stm32, который давно использую в различных проектах. Программа, просто, генерирует 2 прямоугольных сигналы с трёхкратной разницей частот.
Поскольку один раз увидеть лучше чем много раз прочитать — прикладываю развёртку сигналов управления.
Ничего особо сложного. Просто прямоугольные импульсы сдвинутые с разницей частоты в 3 раза.
Верхняя часть экрана — входные сигналы — нижняя — выходные.
Сразу бросается в глаза, что при различающихся значениях сигналов на входах, значения на выходах вполне чёткие Устанавливаются без задержек и с резкими фронтами.
Если же сигналы на входах совпадают — то фронт пологий. похож на разряд конденсатора.
Просмотрев документацию я не увидел ничего такого, что предвещало бы такое поведение.
Может я задал слишком высокую частоту входных сигналов? В даташите лимит не указан.
Уже зная, что у этого драйвера есть почти стопроцентный аналог HG7881 я обратился к его документации.
Она пролила больше света на эту загадочную ситуацию. Оказывается, логика работы драйвера немного шире. Две единицы на входе — это торможение ( то есть на выходе оба сигнала должно быть низкого уровня.) А два нуля на входе — это «висящие» контакты. Разрыв.
Значит два нуля на входе должны «подвешивать» выходы. Тогда, поведение разряжающегося конденсатора вполне предсказуемо. Однако две единицы на входах — должны быть надёжным нулём на выходе. А фактически это не так.
Я мог бы списать этот дефект на «китайского производителя». Однако, я тестировал микросхему по честному выпаянную из ардуиновской платы. При чём — не одну микросхему. Из нескольких плат. То есть, вероятность брака сильно снижена.
Вывод
Область применения микросхем L9110 уже, чем задекларирована, да и КПД низковат.
Рассеяние 0,5-0,6 ватта на одном ключе — это многовато. Не случайно это решение самое дешёвое.(10 центов за микросхему. на алиэкспрессе).
В следующих статьях будут рассмотрены альтернативные драйвера шаговых двигателей.
Драйверы и контроллеры шаговых двигателей
Драйверы и контроллеры шаговых двигателей- Фрезерно-гравировальныe станки
- Лазерные станки с ЧПУ
- Станок плазменной резки
- 3D Принтеры
- Покрасочный станок
- Комплектующие к ЧПУ
- Комплектующие для лазерных станков
- Готовые модули
- Режущий инструмент
- Фрезы ARDEN для ручных и ЧПУ фрезеров
- Фрезы пазовые прямые
- Фрезы для выравнивания поверхности
- Фрезы V-образные
- Фрезы кромочные прямые
- Фрезы для врезания петель и замков
- Фрезы пазовые галтельные
- Фрезы радиусные полукруглые
- Фрезы “Ласточкин хвост”
- Фрезы пазовые
- Фрезы четвертные
- Фрезы профильные
- Фреза “Гусёк” (псевдофилёнка), 222 серия
- Фрезы “Гусёк” 210 серия
- Фрезы “Тройной внешний радиус”, 323 серия
- Фрезы “Декоративный гусёк” 212 серия
- Фрезы “Классический узор”, 211 серия
- Фрезы “Тройной внутренний радиус”, 324 серия
- Фрезы “Шар” 208 серия
- Фрезы Бычий нос “Катушка”, 330 серия
- Фрезы внешнее и внутреннее скругление 2 в 1
- Фрезы для скругления удлиненные
- Фрезы мультипрофильные (Карниз), 351 серия
- Фрезы овальное скругление (Жалюзи)
- Фрезы превсофиленка “Волна-1”
- Фрезы профильные “Ручка” 502 серии
- Фрезы профильные “Углубленный шар”, 329 серия
- Фрезы профильные “Французская классика”, 352 серия
- Фрезы профильные для плинтусов, 403 серия
- Фрезы фигурные “Классический гусёк”, 311 серия
- Фрезы филёночные, 416 серия
- Фрезы для сращивания и мебельной обвязки
- Комплектующие к фрезам ARDEN
- Набор радиальных и фасочных фрез
- Комплектующие для плазменной резки
- Пневматическое оборудование
- Дисковые пилы
- Оборудование для покраски
Я его буду называть ниже просто “мотор”, для краткости.
Расскажу кратко, более подробно про него можно прочитать в википедии или тут.
Самый простой вариант:
Есть четыре электромагнитные катушки A, B, A’, B’. Если по ним пропускать ток — они становятся магнитами (катушки А и В активны при “прямом” направлении тока, A’ и B’ — при “обратном”).
Есть колесо с зубчиками (например, зубчик один — стрелка).
Зубчик притягивается к той катушке, по которой пропускают ток. Таким образом, если последовательно включать ток в катушках, то стрелка будет совершать вращательное движение.
Чтобы сделать это движение более плавным, можно добавлять зубчики, можно катушки, а можно и то и другое — принцип остаётся тот же, меняется только тяга и угол поворота за один вкл/выкл.
Обычно используется следующая конфигурация: катушки выстраиваются по четыре вдоль периметра вращения, на каждую четвёрку есть по зубцу, таким образом есть шестерёнка и много катушек вокруг неё.
Рассмотрим самую простую модель с четырьмя катушками и одним зубчиком.
Подумаем, какими способами можно вращать стрелку.
Допустим, начальное её положение — у B’.
1. Самое очевидное:
Включаем А: стрелка останавливается напротив А.
Выключаем А, включаем В: стрелка идёт к В и останавливает напротив.
Выключаем В, включаем A’: стрелка останавливает уже у A’.
Выключаем A’, включаем B’: стрелка идёт к B’ и останавливает напротив.
Выключаем B’, включаем А: стрелка останавливается напротив А. и т.д.
За каждый раз раз совершается вращение в 90 градусов, полный круг, соответственно, за четыре раза.
Быстро, но очень резко.
Чем плохо:
Резко, потому шумно.
Сразу большой угол поворота, поэтому в зависимости от груза инерция может быть большой, и разогнавшаяся стрелка не остановится сразу, поэтому нужна бОльшая задержка перед тем, как выключить текущую катушку и включить следующую.
Из-за проблемы выше, если скорость сделать слишком большой, можно потерять контроль над вращением, и у вас что-нибудь куда-нибудь улетит или движение станет совсем уж странным.
Чем хорошо: относительно просто реализуемо.
2. Чуть-чуть менее очевидное решение:
Включаем А и B’: стрелка останавливается между А и B’, ровно посередине.
Выключаем B’, включаем В: стрелка фиксируется между А и В.
Выключаем А, включаем A’: стрелка между В и A’.
Выключаем В, включаем B’: стрелка останавливается между A’ и B’.
Выключаем A’, включаем А: стрелка между B’ и А. И т.д.
За раз — те же 90 градусов, полный круг тоже за четыре раза.
Тоже резко.
Что плохо:
Все то же, что и в предыдущем методе
Плюс чуть-чуть сложнее в реализации, но не слишком.
Что хорошо:
Одновременно “в силе” сразу две катушки, то есть тяга гораздо лучше, чем у предыдущего метода.
Соответственно, порог скорость + инерция, после которого мы теряем управление, становится выше по сравнению с первым методом.
3. Измельчим шаги:
Пусть у нас для каждого мотора есть не только состояние вкл/выкл, а некая таблица состояний:
a)
0%
50%
100%
Здесь 50% означает, что сила тока в катушке 50% от максимальной.
Можно ещё мельче:
b)
0%
25%
50%
75%
100%
Или ещё мельче.
Тогда последовательность будет такой:
B’ 100%, А 0%
B’ 75%, А 25%
B’ 50%, А 50%
B’ 25%, А 75%
B’ 0%, А 100%
И то же самое для пар А-В, В-A’, A’-B’, B’-В
Что плохо:
Сложнее реализовать.
Что хорошо:
Шаг мельче, следовательно меньше шума и дребезжания, движение более плавное.
Меньше проблем с инерцией и потерей управления.
Можно сделать ещё мельче, и движение будет ещё плавнее.
4. Будем подавать ток аналоговым способом.
Так сказать предельный случай при увеличении частоты разбиения до бесконечности.
B’ плавно меняем от 100% до 0%, А от 0% до 100%, и так для всех пар А-В, В-A’, A’-B’, B’-В.
Чем хорошо:
Очень плавно, хороший контроль, хорошая тяга. И тишинааа.
Чем плохо:
Аналогово.
Запатентовано.
5. Используем следующий вариант:
Включаем B’ и А: стрелка между B’ и А.
Выключаем B’: стрелка у А.
Включаем В: стрелка между А и В.
Выключаем А: стрелка у В.
Включаем A’: стрелка между A’ и В.
Выключаем В: стрелка у A’.
Включаем B’: стрелка между B’ и A’.
Выключаем A’: стрелка у B’
Включаем А: стрелка между B’ и А.
И т.д.
Отличается от “0%,50%,100%” шага 3 только тягой. 5 — сильнее.
Методы 1, 2, 3, 5 — стандартные, у них даже есть обозначения.
Если считать положение “у катушки” за 1, а положение “между катушками” за 2, следующие обозначения станут понятными:
Режим 1 будет называться 1 phase (полношаговый) (стрелка останавливается только на фазе “1”), но он почти не используется — тяга нехороша и вообще.
Режим 2: 2 phase (полношаговый) (только на фазе “2”).
Режим 5: 1-2 phase (полушаговый) (останавливаемся и на “1” и на “2”).
Режим 3: В зависимости от частоты разбиения:
4 (Цикл от положения “перед катушкой” до “перед следующей катушкой” равен четырём шагам): 2W1-2 phase (2*2 = 4)
8: 4W1-2 phase (4*2 = 8)
По-русски микрошаговый.
Режим 3-а никак не называется, потому что не используется, а метод 4 — запатентован.
Таким образом, зависимость силы тока от времени на катушках А и В (A’ и B’ соответствуют отрицательным значениям силы тока) должна быть примерно такой (для случая 1-2 phase).
Драйвер.
Можно, безусловно, подавать ток соответствующей силы в нужной последовательности прямо на мотор, а можно использовать чип, который сильно упрощает управление. Такой чип называют драйвером. Мы устанавливаем нужные настройки режимов (в регистры), постоянно подаём на драйвер сигнал таймера, и драйвер сам генерирует выход нужной конфигурации.
Нам нужно: сам драйвер (с мотором), таймер достаточной частоты и контролирующий девайс (процессор, микроконтроллер или fpga).
В общем случае, у драйвера есть пины, отвечающие за выставление режима, и управляющие пины.
Например, так:
Сам режим
Максимальная сила тока (от максимальной по спецификации).
Управляющие пины: таймер, направление вращения(по часовой стрелке, против часовой стрелки), пин сброса и пин enabled.
CW — clock-wise
CCW — counter clock-wise
Initial mode — заранее определённое состояние катушек, соответствующее “начальному”. Может быть разным для разных режимов. Например, 100% на А и 0% на В для 1-2 phase, 100% на А и -100% на В для 2 phase. Подержав мотор в этом режиме некоторое время, мы гарантируем, что мотор повёрнут определённым заранее известным образом. Можно начинать отсчёт с этого состояния (нам же нужно в каждый момент времени знать, на какой позиции находится мотор).
Наконец, мы имеем правильно выставленный режим (например, 1-2 phase) и работающий таймер. Тогда выход драйвера будет выглядеть следующим образом:
В общем-то, всё.
Для примера использовался драйвер от Тошиба TB6560AHQ/AFG, хотя подробности не сильно важны, так как цель статьи — рассказать именно общий принцип, не вдаваясь в детали.
В этот раз расскажу о платах управления, распространенных драйверах для шаговых двигателей и немного теории об их работе. К сожалению, у поста есть предел – 65535 символов, и я уже в них не укладываюсь, что бы описать более подробно распространенные платы управления, поэтому они будут в следующем посте, ровно как и разбор прошивок,положительных сторон и недостатков.
Существующие 3D принтеры выросли из больших станков, у которых позаимствовали кинематику и способ управления, который заключается в том, что бы последовательно передавать координаты для перемещения хотенда. Такой своеобразный метод является общепринятым стандартом для управления станков с ЧПУ (числовым программным управлением). Этот язык программирования называется G-code. Язык своеобразный, и изучать его нет необходимости, перевод модели из графического вида в машинный код для перемещения хотенда по осям и подачи пластика осуществляется в программах-слайсерах. Их я опишу чуть позже, пока же хочу вернуться к физической части принтеров и рассмотреть с помощью чего же можно правильно крутить шаговыми двигателями и получать готовую модель.
1. Платы управления и как они управляют.
Для упрощенного понимания платы стоит разделить на 2 категории по их разрядности. Бывают 8-битные и 32-битные. Первые 3D принтеры, основанные на REPRAP (Replicating Rapid Prototyper — самовоспроизводящийся механизм для быстрого изготовления прототипов) имели в основе распространенную плату для робототехники, ориентированную на непрофессиональных пользователей – Arduino. Для создания прошивки используется собственная бесплатная среда разработки – Arduino IDE.
 Arduino и Arduino-совместимые платы спроектированы таким образом, чтобы их можно было при необходимости расширять, добавляя в устройство новые компоненты. Как наиболее мощная была взята плата Arduino Mega 2560 с 8-битным процессором.
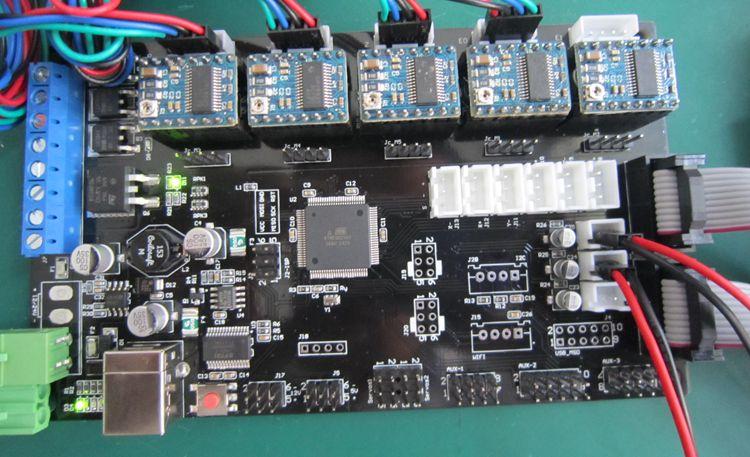
Arduino и Arduino-совместимые платы спроектированы таким образом, чтобы их можно было при необходимости расширять, добавляя в устройство новые компоненты. Как наиболее мощная была взята плата Arduino Mega 2560 с 8-битным процессором.  Для расширения ее возможностей, то есть управления нагревом горячего стола (Heat bed), хотенда (Hot end), управления вращением шаговых двигателей, учета нулевого положения с помощью концевых выключателей и прочего была разработана плата расширения RAMPS (RepRap Arduino Mega Pololu Shield).
Для расширения ее возможностей, то есть управления нагревом горячего стола (Heat bed), хотенда (Hot end), управления вращением шаговых двигателей, учета нулевого положения с помощью концевых выключателей и прочего была разработана плата расширения RAMPS (RepRap Arduino Mega Pololu Shield).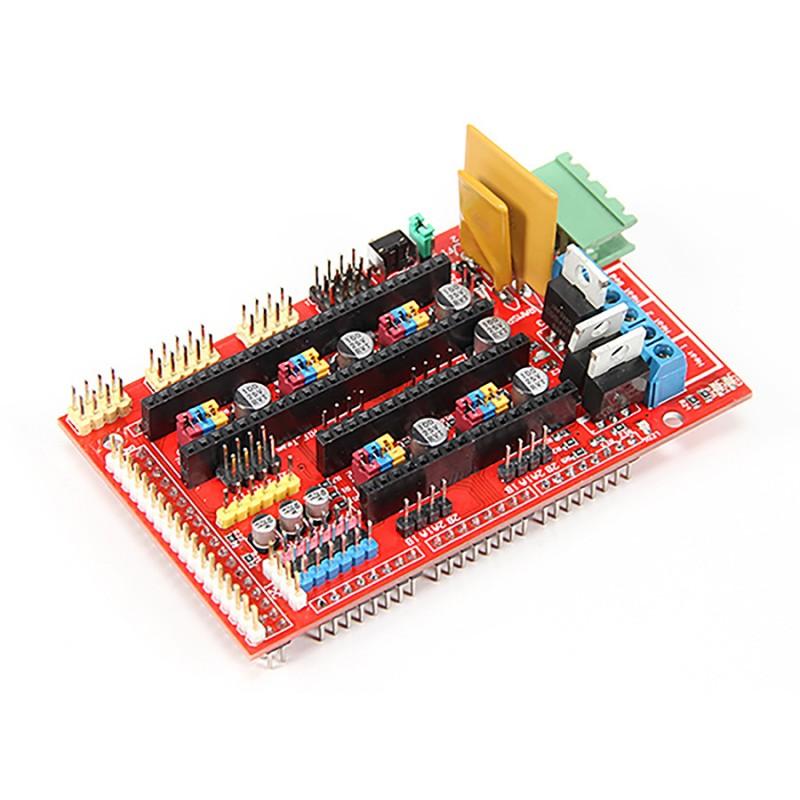 Так же, для управления шаговыми двигателями были разработаны драйвера, совместимые с этой платой (Pololu драйвера).
Так же, для управления шаговыми двигателями были разработаны драйвера, совместимые с этой платой (Pololu драйвера).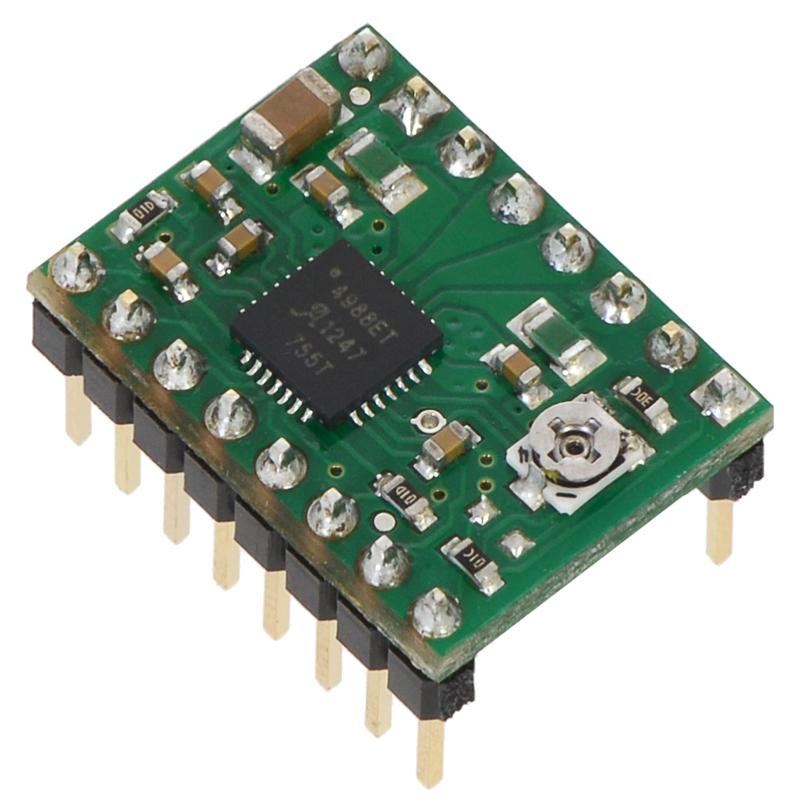 Которые вставляются в гнезда платы. То есть для каждого шагового двигателя, подключаемого к связке Arduino+RAMPS необходим драйвер. RAMPS поддерживает подключение до 5 шаговых двигателей.
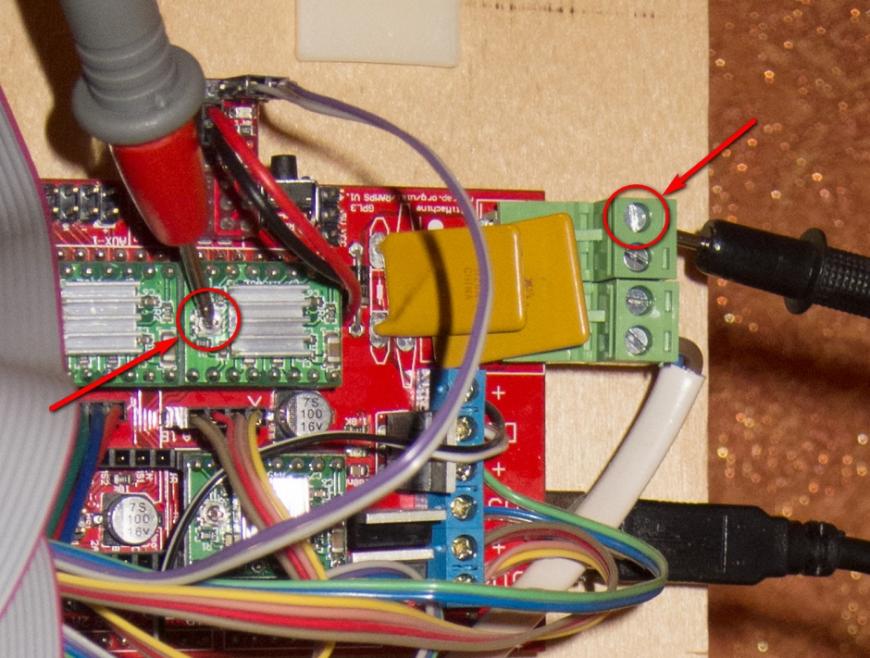
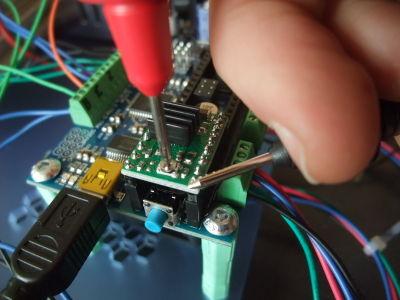
Которые вставляются в гнезда платы. То есть для каждого шагового двигателя, подключаемого к связке Arduino+RAMPS необходим драйвер. RAMPS поддерживает подключение до 5 шаговых двигателей.Для управления шаговым двигателем необходимо настроить напряжение питания двигателя подстроечным резистором. Настройка производится мультиметром в режиме замера постоянного напряжения. Один щуп касается земли ( крайнего контакта на драйвере с надписью GND или же минусового провода от блока питания), другим же коснуться подстроечного резистора.
 Далее нужно посчитать по формуле необходимое напряжение, исходя из тока, на который рассчитан двигатель.
Далее нужно посчитать по формуле необходимое напряжение, исходя из тока, на который рассчитан двигатель.Vref – пин замера напряжения для установки тока по формуле.
Current Limit – ток шагового двигателя.
Формула Vref для A4988 изменяется от номинала токочувствительных резисторов. Это два чёрных прямоугольника на плате драйвера. Обычно подписаны R050 или R100.
Vref = Current Limit * 8 * (RS)
RS = 0,100
Vref = Current Limit * 8 * 0,100 = Current Limit / 1,25
RS = 0,050
Vref = Current Limit * 8 * 0,050 = Current Limit / 2,5
Например для 17HS4401: Vref = 1,7 / 2,5 = 0,68В
И вращая резистор добиваемся данной цифры на дисплее мультиметра. Важное дополнение, для того, что бы отрегулировать напряжение необходимо выключить принтер, а для замера – включить.
Формулы для других типов драйверов приведены в этой статье.
Другие платы формата All-in-one (все на одной плате, без таких многослойных конструкций) имеют аналогичные колодки под уже ставшими столь распространенными Pololu-драйвера.
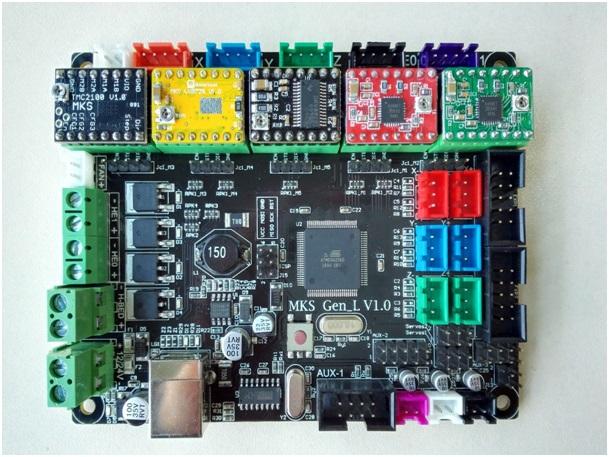 Так же, для выбора режима работы шагового двигателя между колодками для установки шаговых двигателей сделаны перемычки, замыкая которые мы выбираем тот или иной режим работы.
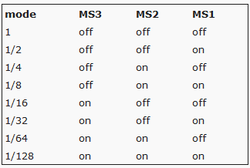
Так же, для выбора режима работы шагового двигателя между колодками для установки шаговых двигателей сделаны перемычки, замыкая которые мы выбираем тот или иной режим работы.Режимов работы у шагового двигателя с драйверами А4988 всего 5: полный шаг, 1/2 шага, 1/4 шага, 1/8 шага и 1/16.
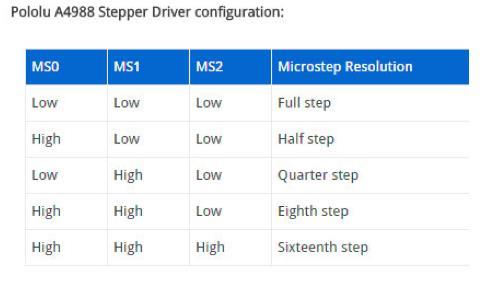 Перемычки всего 3: MS0, MS1, MS2. Low – перемычка отсутствует, high – установлена.
Перемычки всего 3: MS0, MS1, MS2. Low – перемычка отсутствует, high – установлена.Получается, что когда нет ни одной перемычки мотор вращается без деления шага на микрошаги, а когда установлены все 3 – на 1/16.
Дробление шага на микрошаги сделано с единственной целью – увеличения точности перемещения. То есть используя дробление 1/4 шага мы не сможем остановиться посередине между 2 и 3 микрошагом. При 1/16 это возможно.
Существует множество драйверов, совместимых с платами, применяемыми в 3D принтерах. Небольшой список:
1 ) A4988.
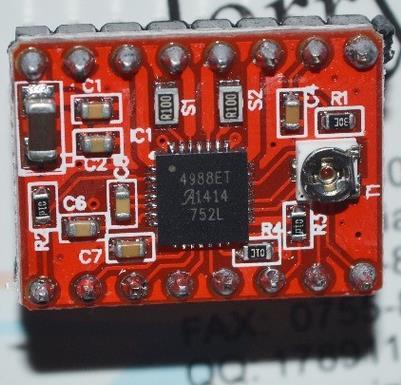 Могут быть как зеленые, так и красные.
Могут быть как зеленые, так и красные.Максимальный делитель 1/16.
2 ) DRV8825.
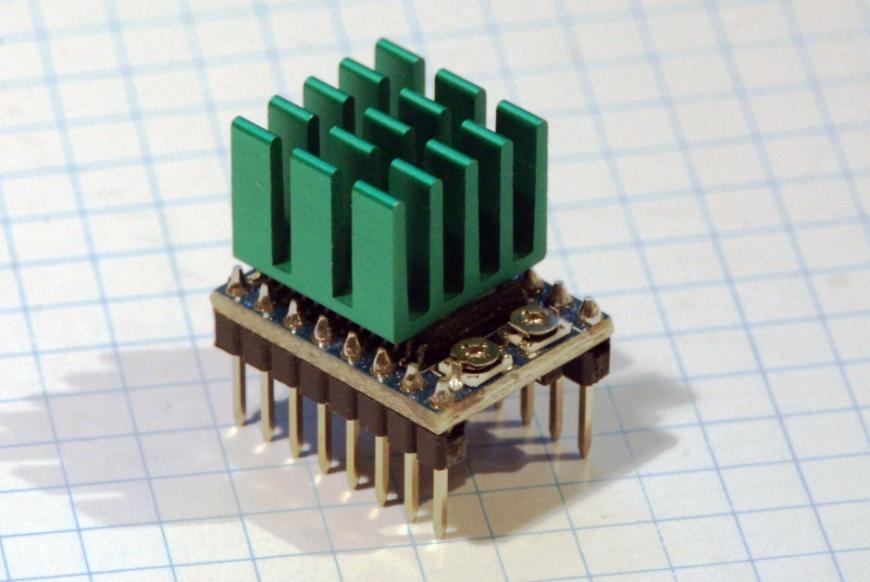
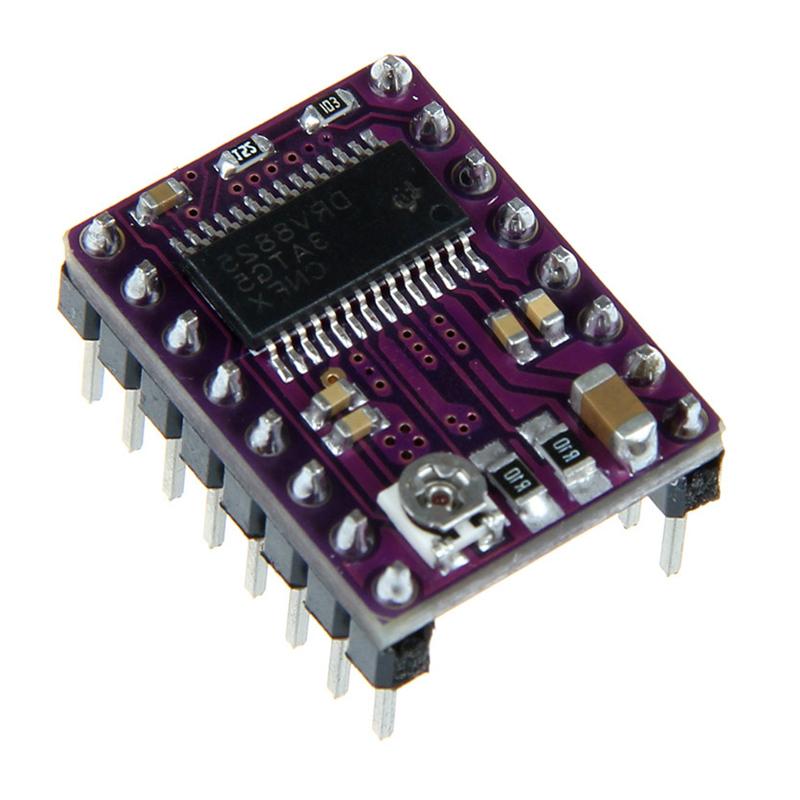 Могут встречаться как фиолетовые, так и синие. Из-за отсутствия нормального режима удержания (в статичном положении, но с фиксацией ротора, обычно этот режим потребляет меньше энергии, чем вращение) сильно греется. Поэтому рекомендуется устанавливать на чип хороший радиатор.
Могут встречаться как фиолетовые, так и синие. Из-за отсутствия нормального режима удержания (в статичном положении, но с фиксацией ротора, обычно этот режим потребляет меньше энергии, чем вращение) сильно греется. Поэтому рекомендуется устанавливать на чип хороший радиатор.Максимальный делитель 1/32.
3 ) TMC2100.
 Существует как оригинал, доступный в магазине в Германии и в США, так и множество китайских копий.
Существует как оригинал, доступный в магазине в Германии и в США, так и множество китайских копий.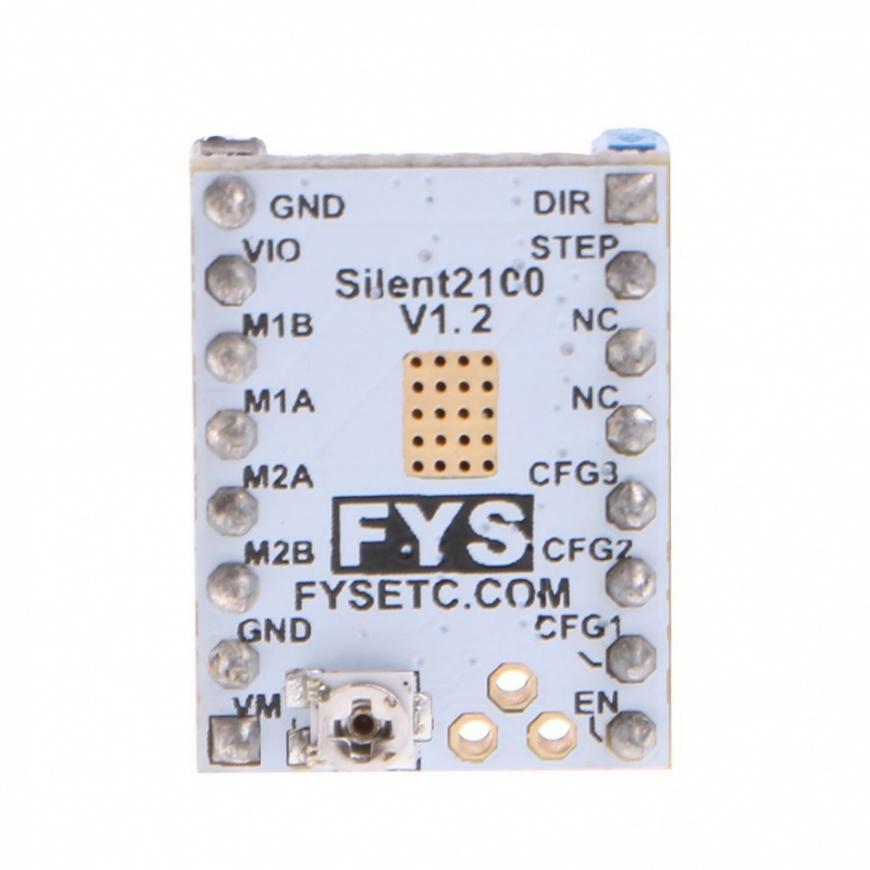
 Чип тот же, производства Германии, а вот обвязку (резисторы, конденсаторы…) каждый китаец ваяет по-своему, поэтому возникает сложность в подборе напряжения для питания шагового двигателя. Данный драйвер позиционируется как тихий, в котором шум и писк двигателей сведен к минимуму.
Чип тот же, производства Германии, а вот обвязку (резисторы, конденсаторы…) каждый китаец ваяет по-своему, поэтому возникает сложность в подборе напряжения для питания шагового двигателя. Данный драйвер позиционируется как тихий, в котором шум и писк двигателей сведен к минимуму.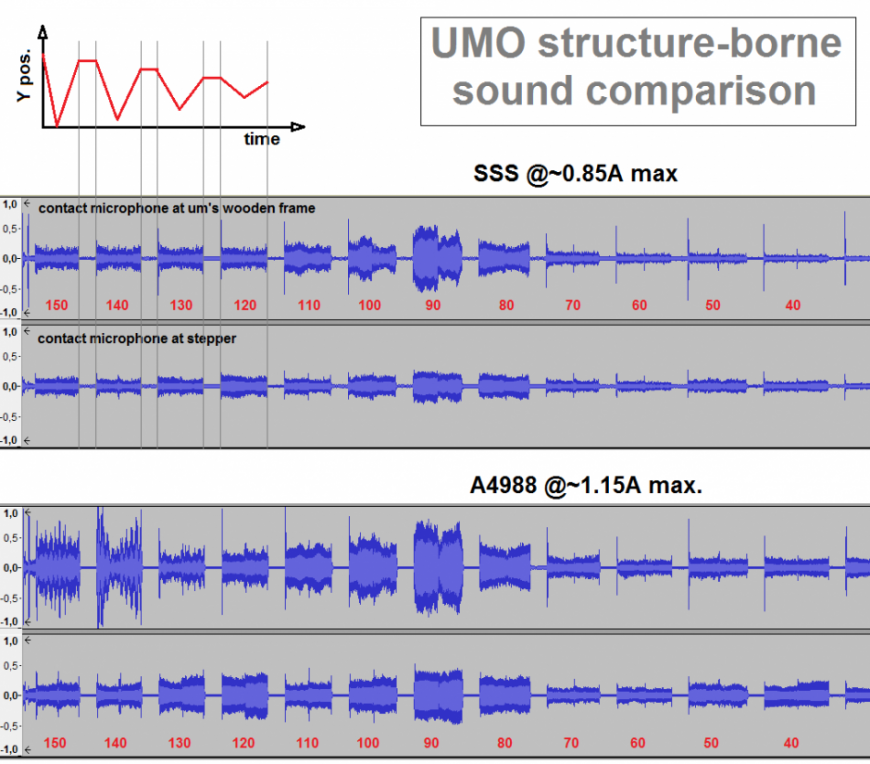 Сравнение шума от А4988 и TMC2100.
Сравнение шума от А4988 и TMC2100.Но как полагается, чем-то нужно жертвовать взамен. Он очень сильно греется, а при перегреве начинаются пропуски шагов и перемещения по осям могут быть неверными.
 У меня в первый раз кубик стал сопляной гусеницей.
У меня в первый раз кубик стал сопляной гусеницей. Как следствие – нужно хорошее охлаждение (некоторые китайцы пренебрегают метализацией для отвода тепла, поскольку чип расположен ‘на пузе’ ) и очень точная регулировка напряжения. Есть и небольшие каверзы – вроде бы точно отрегулировал, печатает который месяц мелкие детали без съездов, а ставишь деталь на сутки-двое, и где-то в конце печати получишь микросъезд на 0,5 мм.
Как следствие – нужно хорошее охлаждение (некоторые китайцы пренебрегают метализацией для отвода тепла, поскольку чип расположен ‘на пузе’ ) и очень точная регулировка напряжения. Есть и небольшие каверзы – вроде бы точно отрегулировал, печатает который месяц мелкие детали без съездов, а ставишь деталь на сутки-двое, и где-то в конце печати получишь микросъезд на 0,5 мм.Драйвер имеет собственный чип, который интерполирует делитель 1/16 в 1/256 без нагрузки для процессора, и обеспечивает очень тихую работу.
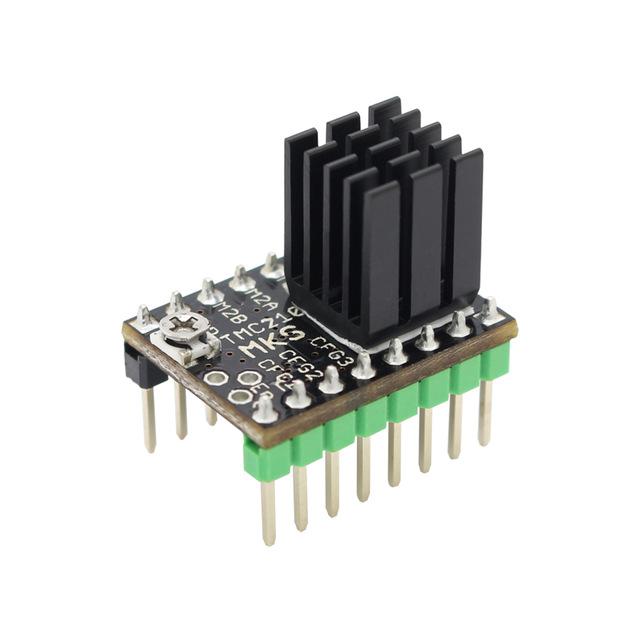
4 ) LV8729
Чаще всего драйвер исполнения китайской компании Makerbase (MKS).

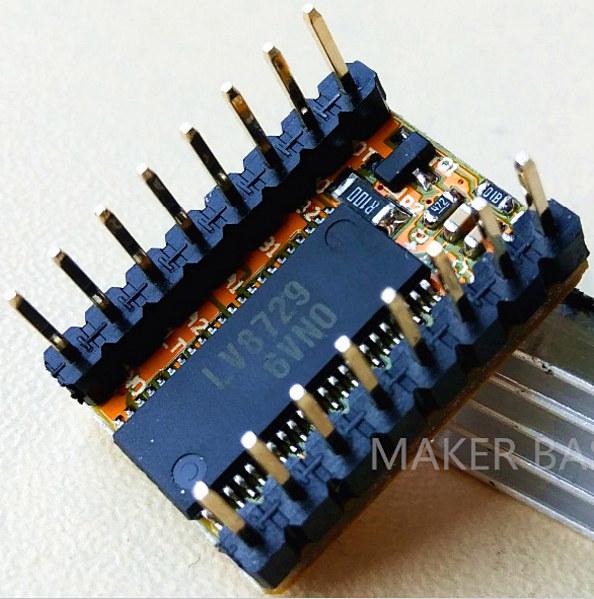 Драйвера характеризуются широкими возможностями регулировки делителя микрошага. От полного до 1/128. Внутреннего делителя, как у ТМС2100 нет.
Драйвера характеризуются широкими возможностями регулировки делителя микрошага. От полного до 1/128. Внутреннего делителя, как у ТМС2100 нет. Использовать с 1/64 и 1/128 с 8-битной электроникой (на базе AtMega 2560) не рекомендуется, так как необходимо задействовать очень много ресурсов процессора. Предназначены для установки в 32-разрядные платы.
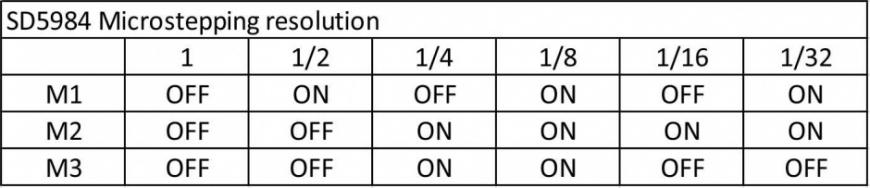
Использовать с 1/64 и 1/128 с 8-битной электроникой (на базе AtMega 2560) не рекомендуется, так как необходимо задействовать очень много ресурсов процессора. Предназначены для установки в 32-разрядные платы.5 ) SD5984.
 Драйвера производства Panucatt Devices. Продаются только там, китайцы не делают такие. Тоже поддерживают дробление шага от полного до 1/32. Имеется защита от большого тока и перегрева. Как вы заметили на фото, есть 2 ‘лишних’ штырька – драйвера поддерживают регулировку напряжения извне, то есть в прошивке платы. Что очень удобно позволяет контролировать и регулировать напряжение.
Драйвера производства Panucatt Devices. Продаются только там, китайцы не делают такие. Тоже поддерживают дробление шага от полного до 1/32. Имеется защита от большого тока и перегрева. Как вы заметили на фото, есть 2 ‘лишних’ штырька – драйвера поддерживают регулировку напряжения извне, то есть в прошивке платы. Что очень удобно позволяет контролировать и регулировать напряжение.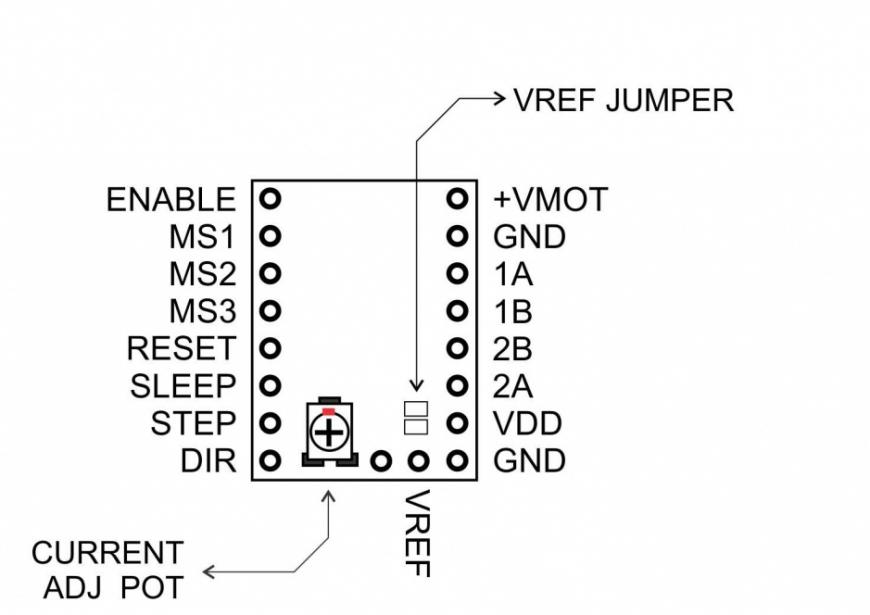 Поставляется в 2 вариантах:
Поставляется в 2 вариантах:1) Стандартная версия. Площадка под пины регулировки напряжения закорочена, и регулировка напряжения возможна как во всех остальных драйверах – руками, в смысле отверткой и мультиметром. Поддерживается всеми платами.
2) Цифровая регулировка. Пины в наличии и регулировка производится программно. Поддерживается только собственными контроллерами: Azteeg X3, X3 PRO и X5 mini V3.
 6 ) SD6128
6 ) SD6128Драйвера так же производства Panucatt Devices.
 В отличие от SD6128 имеют дробление шага до 1/256. Так же, имеется защита от перегрева и большого тока. Аналогично, присутствует в 2 версиях: с ручной регулировкой напряжения, и с поддержкой программной регулировки. Программная регулировка доступна только для плат Azteeg X3, X3 PRO и X5 mini V3.
В отличие от SD6128 имеют дробление шага до 1/256. Так же, имеется защита от перегрева и большого тока. Аналогично, присутствует в 2 версиях: с ручной регулировкой напряжения, и с поддержкой программной регулировки. Программная регулировка доступна только для плат Azteeg X3, X3 PRO и X5 mini V3.В основе драйвера лежит чип THB6128. Драйвер работает как в 3,3В (32-разрядные платы), так и 5В (8-разрядные). Установка делителя производится так же, перемычками, в соответствии с таблицей из pdf-описания.
Для установки в 8-битные платы, задействовать делители выше 1/64 не рекомендуется из-за возможной перегрузки процессора.
7 ) SD8825.
 Собственная версия Panucatt Devices, аналогичная привычной DRV8825, с тем лишь отличием, что есть 2 пина для управления напряжением на драйвере. Регулировка доступна лишь на платах собственного производства: Azteeg X3, X3 PRO и X5 mini V3.
Собственная версия Panucatt Devices, аналогичная привычной DRV8825, с тем лишь отличием, что есть 2 пина для управления напряжением на драйвере. Регулировка доступна лишь на платах собственного производства: Azteeg X3, X3 PRO и X5 mini V3.Делитель 1/32.
8 ) TMC2130.
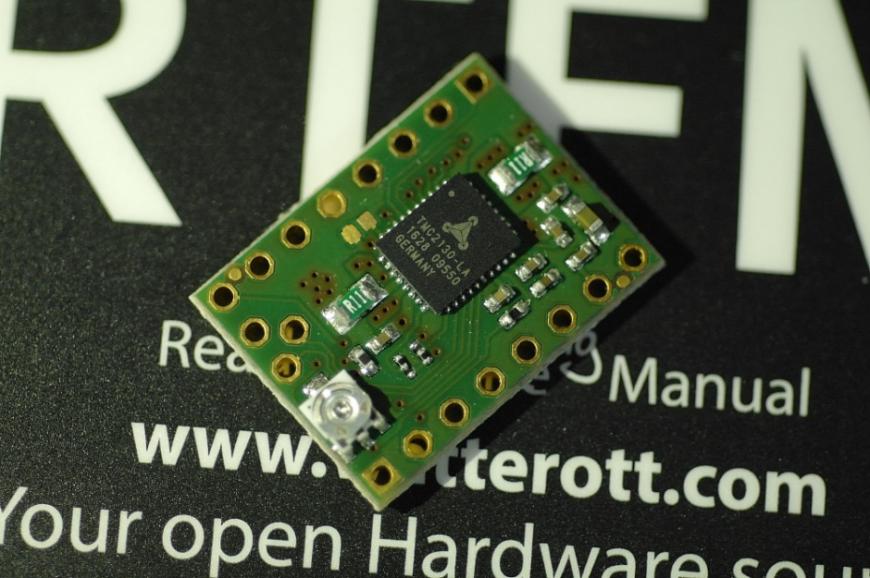 Свой опыт использования и покупки я уже описывал. Повторюсь, что если есть желание заморочиться с использованием SPI на плате, и попытаться настроить напряжение – пожалуйста. В распространенную прошивку для 8-битных плат Marlin уже добавлена библиотека для данного драйвера и авторегулировки его напряжения (ток прибавляется до тех пор, пока не появится ошибка о перегреве, далее оно снижается пошагово, с шагом в 50мА), но пока толковых упоминаний об установке и настройке Pololu-драйвера не видел. Единственная реализация, заслуживающая внимания – реализация Джозефа Прюши, на новой MK3. В его новой плате EINSY RAMBO данные драйвера уже впаяны в плату, а прошивка поддерживает регулировку напряжения. Одним из преимуществ данного драйвера является контроль момента на роторе двигателя, то есть в момент касания каретки стопора момент на валу ротора резко увеличивается, и плата понимает, что каретка доехала до максимума и дальше пытаться ее двигать нет смысла. Поэтому там отсутствуют концевые выключатели.
Свой опыт использования и покупки я уже описывал. Повторюсь, что если есть желание заморочиться с использованием SPI на плате, и попытаться настроить напряжение – пожалуйста. В распространенную прошивку для 8-битных плат Marlin уже добавлена библиотека для данного драйвера и авторегулировки его напряжения (ток прибавляется до тех пор, пока не появится ошибка о перегреве, далее оно снижается пошагово, с шагом в 50мА), но пока толковых упоминаний об установке и настройке Pololu-драйвера не видел. Единственная реализация, заслуживающая внимания – реализация Джозефа Прюши, на новой MK3. В его новой плате EINSY RAMBO данные драйвера уже впаяны в плату, а прошивка поддерживает регулировку напряжения. Одним из преимуществ данного драйвера является контроль момента на роторе двигателя, то есть в момент касания каретки стопора момент на валу ротора резко увеличивается, и плата понимает, что каретка доехала до максимума и дальше пытаться ее двигать нет смысла. Поэтому там отсутствуют концевые выключатели.Плата, аналогично с TMC2100, имеет внутренний делитель с 1/16 до 1/256. Переключение между делителями производится программно, по SPI-интерфейсу.
 Появилось достаточно много китайских клонов, в которых SPI-интрефейс запаян, и работа полностью аналогична TMC2100. Как утверждает представитель компании Watterott – разницы между TMC2100 и TMC2130 с запаяным SPI никакой.
Появилось достаточно много китайских клонов, в которых SPI-интрефейс запаян, и работа полностью аналогична TMC2100. Как утверждает представитель компании Watterott – разницы между TMC2100 и TMC2130 с запаяным SPI никакой.9 ) TMC2208
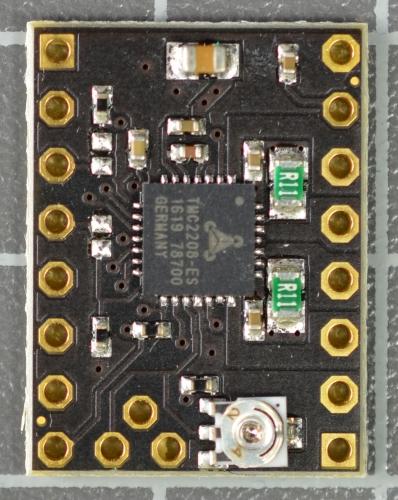 Новая версия драйверов от Trinamic и Watterott. Конфигурация деления микрошага осуществляется через UART-интерфейс, вот такой платой.
Новая версия драйверов от Trinamic и Watterott. Конфигурация деления микрошага осуществляется через UART-интерфейс, вот такой платой.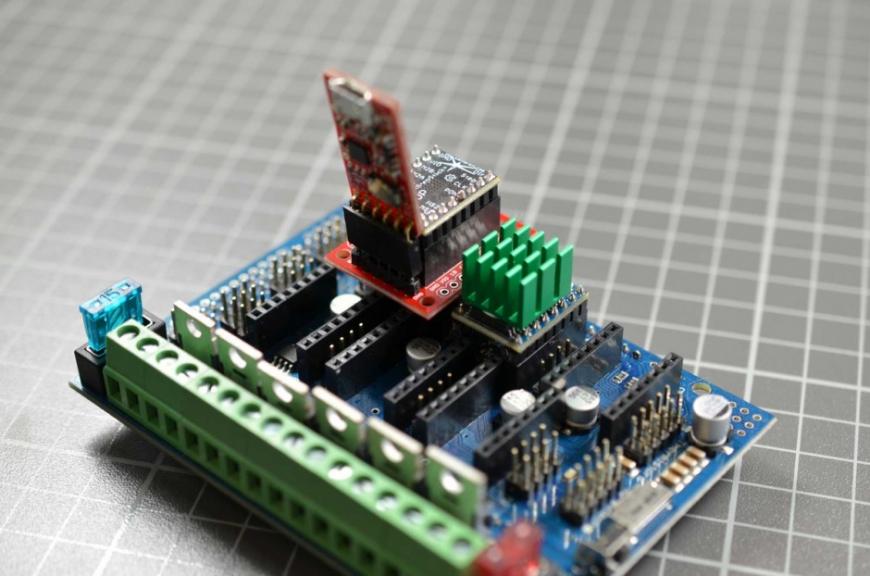 Плата обеспечивает подключение драйвера через данный интерфейс через кабель к USB компьютера. Далее с помощью собственной утилиты производится конфигурация параметров.
Плата обеспечивает подключение драйвера через данный интерфейс через кабель к USB компьютера. Далее с помощью собственной утилиты производится конфигурация параметров.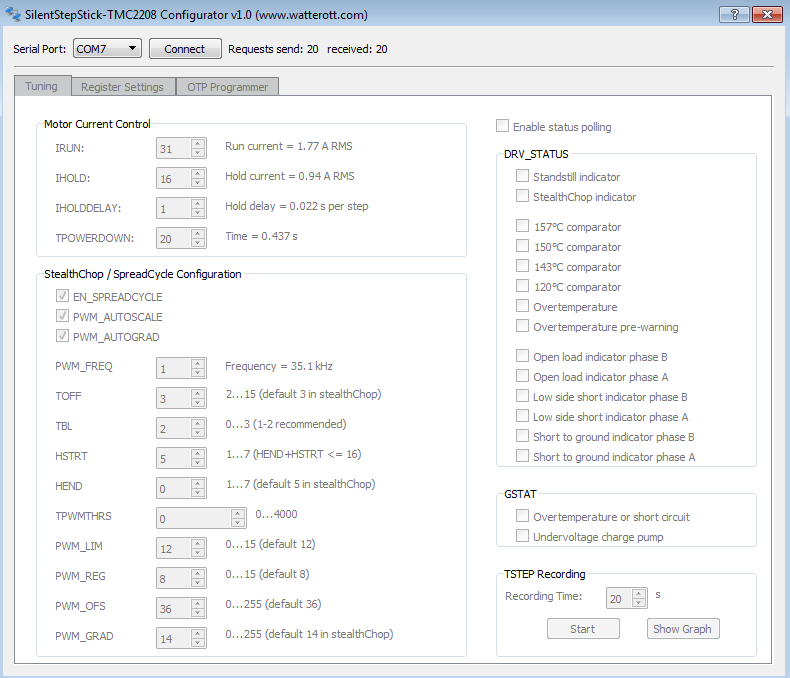 После конфигурирования прошивки плату можно отключить от драйвера.
После конфигурирования прошивки плату можно отключить от драйвера.Уже появились китайские клоны данной платы.
 Приобрел себе такой. Могу сделать единственный вывод – китайские клоны намного капризнее и сложнее в настройке напряжения, нежели оригиналы. Были и BigtreeTech TMC2100 и Makerbase TMC2100 и вот эти blkbox TMC2208, и разумеется оригинальные TMC2100. Настроить китайцев, что б вот прям
Приобрел себе такой. Могу сделать единственный вывод – китайские клоны намного капризнее и сложнее в настройке напряжения, нежели оригиналы. Были и BigtreeTech TMC2100 и Makerbase TMC2100 и вот эти blkbox TMC2208, и разумеется оригинальные TMC2100. Настроить китайцев, что б вот прям У чипа такой же делитель с 1/16 до 1/256, как и у всех остальных TMC2100,2130.
10 ) RAPS128
 Сложно сказать, кто кого повторил, если убрать все стереотипы. Немецкие драйвера, на базе THB6128 ( как и у Panucatt Divices SD6128 ,если верить Wiki REPRAP.org и сайту производителя. Судя по описанию на сайте магазина, где они продаются, немцы не гнушаются ставить и LV8729V, как у китайских MKS LV8729.
Сложно сказать, кто кого повторил, если убрать все стереотипы. Немецкие драйвера, на базе THB6128 ( как и у Panucatt Divices SD6128 ,если верить Wiki REPRAP.org и сайту производителя. Судя по описанию на сайте магазина, где они продаются, немцы не гнушаются ставить и LV8729V, как у китайских MKS LV8729.Драйвер имеет делитель от полного шага до 1/128. Для 8-битных плат не рекомендуется ставить делитель выше 1/32.
 Как очень заметно, выделяется не 1, а 2 потенциометра.
Как очень заметно, выделяется не 1, а 2 потенциометра.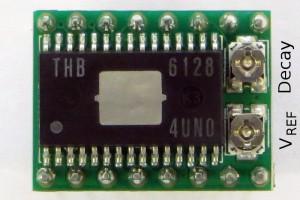 Левый – для настройки напряжения, а правый отвечает за регулировку спада тока. Производитель рекомендует держать положение этого потенциометра где-то посередине, от 1,1 до 3В. В даташите на любые драйвера имеются табличные значения для установки спада тока. Небольшое лирическое отступление.
Левый – для настройки напряжения, а правый отвечает за регулировку спада тока. Производитель рекомендует держать положение этого потенциометра где-то посередине, от 1,1 до 3В. В даташите на любые драйвера имеются табличные значения для установки спада тока. Небольшое лирическое отступление.Представлю небольшую выжимку данной статьи, для понимания принципов работы шаговых двигателей и сложностей управления ими.
Шаговый двигатель. Как он работает и зачем ему спад тока?
Шаговый двигатель – это электромеханическое устройство, которое преобразует электрические импульсы в дискретные механические перемещения.
Однако шаговые двигатели обладают множеством полезных свойств, а главное – они дешевы.
Чем же хорош шаговый двигатель?
- угол поворота ротора определяется числом импульсов, которые поданы на двигатель;
- двигатель обеспечивает полный момент в режиме удержания;
- точное позиционирование и повторяемость. Хорошие шаговые двигатели имеют точность 3-5% от величины шага. Эта ошибка не накапливается от шага к шагу;
- возможность быстрого старта/остановки/реверсирования;
- надежность, связанная с отсутствием щеток, срок службы шагового двигателя фактически определяется сроком службы подшипников;
- однозначная зависимость положения от входных импульсов обеспечивает позиционирование без обратной связи;
- возможность получения очень низких скоростей вращения для нагрузки, присоединенной непосредственно к валу двигателя без промежуточного редуктора;
- может быть перекрыт довольно большой диапазон скоростей, скорость пропорциональна частоте входных импульсов;
- шаговым двигателям присуще явление резонанса;
- возможна потеря положения из-за отсутствия обратной связи;
- потребление энергии не уменьшается даже без нагрузки;
- затруднена работа на высоких скоростях;
- невысокая удельная мощность;
- относительно сложная схема управления;
Существуют три основных типа шаговых двигателей:
- двигатели с переменным магнитным сопротивлением
- двигатели с постоянными магнитами
- гибридные двигатели
В шаговом двигателе вращающий момент создается магнитными потоками статора и ротора, которые соответствующим образом ориентированы друг относительно друга. Статор изготовлен из материала с высокой магнитной проницаемостью и имеет несколько полюсов. Полюс можно определить как некоторую область намагниченного тела, где магнитное поле сконцентрировано. Полюса имеют как статор, так и ротор. Для уменьшения потерь на вихревые токи магнитопроводы собраны из отдельных пластин, подобно сердечнику трансформатора. Вращающий момент пропорционален величине магнитного поля, которая пропорциональна току в обмотке и количеству витков. Таким образом, момент зависит от параметров обмоток. Если хотя бы одна обмотка шагового двигателя запитана, ротор принимает определенное положение. Он будет находится в этом положении до тех пор, пока внешний приложенный момент не превысит некоторого значения, называемого моментом удержания. После этого ротор повернется и будет стараться принять одно из следующих положений равновесия.
Нас интересуют гибридные двигатели, наиболее часто применяемые в 3D принтерах.
Гибридные двигатели сочетают в себе лучшие черты двигателей с переменным магнитным сопротивлением и двигателей с постоянными магнитами. Ротор гибридного двигателя имеет зубцы, расположенные в осевом направлении.
 Ротор разделен на две части, между которыми расположен постоянный магнит. Таким образом, зубцы верхней половины ротора являются северными полюсами, а зубцы нижней половины – южными. Кроме того, верхняя и нижняя половинки ротора повернуты друг относительно друга на половину угла шага зубцов. Число пар полюсов ротора равно количеству зубцов на одной из его половинок. Зубчатые полюсные наконечники ротора, как и статор, набраны из отдельных пластин для уменьшения потерь на вихревые токи. Статор гибридного двигателя также имеет зубцы, обеспечивая большое количество эквивалентных полюсов, в отличие от основных полюсов, на которых расположены обмотки. Обычно используются 4 основных полюса для 3.6 град. двигателей и 8 основных полюсов для 1.8- и 0.9 град. двигателей. Зубцы ротора обеспечивают меньшее сопротивление магнитной цепи в определенных положениях ротора, что улучшает статический и динамический момент. Это обеспечивается соответствующим расположением зубцов, когда часть зубцов ротора находится строго напротив зубцов статора, а часть между ними.
Ротор разделен на две части, между которыми расположен постоянный магнит. Таким образом, зубцы верхней половины ротора являются северными полюсами, а зубцы нижней половины – южными. Кроме того, верхняя и нижняя половинки ротора повернуты друг относительно друга на половину угла шага зубцов. Число пар полюсов ротора равно количеству зубцов на одной из его половинок. Зубчатые полюсные наконечники ротора, как и статор, набраны из отдельных пластин для уменьшения потерь на вихревые токи. Статор гибридного двигателя также имеет зубцы, обеспечивая большое количество эквивалентных полюсов, в отличие от основных полюсов, на которых расположены обмотки. Обычно используются 4 основных полюса для 3.6 град. двигателей и 8 основных полюсов для 1.8- и 0.9 град. двигателей. Зубцы ротора обеспечивают меньшее сопротивление магнитной цепи в определенных положениях ротора, что улучшает статический и динамический момент. Это обеспечивается соответствующим расположением зубцов, когда часть зубцов ротора находится строго напротив зубцов статора, а часть между ними. Ротор привычного для 3D принтера двигателя имеет 100 полюсов (50 пар), двигатель имеет 2 фазы, поэтому полное количество полюсов – 200, а шаг, соответственно, 1.8 град.
Ротор привычного для 3D принтера двигателя имеет 100 полюсов (50 пар), двигатель имеет 2 фазы, поэтому полное количество полюсов – 200, а шаг, соответственно, 1.8 град.Как видно на рисунке, воздушные зазоры у верхнего и нижнего полюсного наконечника ротора разные. Это достигается благодаря повороту полюсных наконечников на половину шага зубъев. Поэтому существует другая магнитная цепь, которая содержит минимальные воздушные зазоры и, как следствие, обладает минимальным магнитным сопротивлением. По этой цепи замыкается другая часть потока (на рисунке показана штриховой белой линией), которая и создает момент. Часть цепи лежит в плоскости, перпендикулярной рисунку, поэтому не показана. В этой же плоскости создают магнитный поток катушки статора. В гибридном двигателе этот поток частично замыкается полюсными наконечниками ротора, и постоянный магнит его «видит» слабо. Поэтому в отличие от двигателей постоянного тока, магнит гибридного двигателя невозможно размагнитить ни при какой величине тока обмоток.
Величина зазора между зубцами ротора и статора очень небольшая – типично 0.1 мм. Это требует высокой точности при сборке, поэтому шаговый двигатель не стоит разбирать ради удовлетворения любопытства, иначе на этом его срок службы может закончиться.
Чтобы магнитный поток не замыкался через вал, который проходит внутри магнита, его изготавливают из немагнитных марок стали. Они обычно обладают повышенной хрупкостью, поэтому с валом, особенно малого диаметра, следует обращаться осторожно.
Для получения больших моментов необходимо увеличивать как поле, создаваемое статором, так и поле постоянного магнита. При этом требуется больший диаметр ротора, что ухудшает отношение крутящего момента к моменту инерции. Поэтому мощные шаговые двигатели иногда конструктивно выполняют из нескольких секций в виде этажерки. Крутящий момент и момент инерции увеличиваются пропорционально количеству секций, а их отношение не ухудшается.
Гибридные двигатели подразделяются на 2 типа. В зависимости от конфигурации обмоток двигатели делятся на биполярные и униполярные. Биполярный двигатель (на рисунке ниже под буквой а) имеет одну обмотку в каждой фазе, которая для изменения направления магнитного поля должна переполюсовывается драйвером. Всего биполярный двигатель имеет две обмотки и, соответственно, четыре вывода.
 Униполярный двигатель (б) также имеет одну обмотку в каждой фазе, но от середины обмотки сделан отвод. Это позволяет изменять направление магнитного поля, создаваемого обмоткой, простым переключением половинок обмотки. Средние выводы обмоток могут быть объединены внутри двигателя, поэтому такой двигатель может иметь 5 или 6 выводов. Иногда униполярные двигатели имеют раздельные 4 обмотки, по этой причине их ошибочно называют 4-х фазными двигателями. Каждая обмотка имеет отдельные выводы, поэтому всего выводов 8 (в). При соответствующем соединении обмоток такой двигатель можно использовать как униполярный или как биполярный. Униполярный двигатель с двумя обмоткими и отводами тоже можно использовать в биполярном режиме, если отводы оставить неподключенными. В любом случае ток обмоток следует выбирать так, чтобы не превысить максимальной рассеиваемой мощности.
Униполярный двигатель (б) также имеет одну обмотку в каждой фазе, но от середины обмотки сделан отвод. Это позволяет изменять направление магнитного поля, создаваемого обмоткой, простым переключением половинок обмотки. Средние выводы обмоток могут быть объединены внутри двигателя, поэтому такой двигатель может иметь 5 или 6 выводов. Иногда униполярные двигатели имеют раздельные 4 обмотки, по этой причине их ошибочно называют 4-х фазными двигателями. Каждая обмотка имеет отдельные выводы, поэтому всего выводов 8 (в). При соответствующем соединении обмоток такой двигатель можно использовать как униполярный или как биполярный. Униполярный двигатель с двумя обмоткими и отводами тоже можно использовать в биполярном режиме, если отводы оставить неподключенными. В любом случае ток обмоток следует выбирать так, чтобы не превысить максимальной рассеиваемой мощности.Так какой лучше?
Если сравнивать между собой биполярный и униполярный двигатели, то первый имеет выше удельную мощность. При одних и тех же размерах биполярные двигатели обеспечивают больший момент.Момент, создаваемый шаговым двигателем, пропорционален величине магнитного поля, создаваемого обмотками статора. Наиболее важным является ограничение по нагреву двигателя вследствие омических потерь в обмотках. Как раз этот факт и демонстрирует одно из преимуществ биполярных двигателей. В униполярном двигателе в каждый момент времени используется лишь половина обмоток. Другая половина просто занимает место в окне сердечника, что вынуждает делать обмотки проводом меньшего диаметра. В то же время в биполярном двигателе всегда работают все обмотки, т.е. их использование оптимально. В таком двигателе сечение отдельных обмоток вдвое больше, а омическое сопротивление – соответственно вдвое меньше. Это позволяет увеличить ток в корень из двух раз при тех же потерях, что дает выигрыш в моменте примерно 40%. Если же повышенного момента не требуется, униполярный двигатель позволяет уменьшить габариты или просто работать с меньшими потерями. На практике все же часто применяют униполярные двигатели, так как они требуют значительно более простых схем управления обмотками.
А как управлять шаговым двигателем?
Существует несколько способов управления шаговым двигателем. Все расписывать не буду, так как они относятся к полношаговым или полушаговым режимам работы. Нас интересует именно микрошаговый режим. При этом способе управления ток в фазах нужно менять небольшими шагами, обеспечивая таким образом дробление половинного шага на еще меньшие микрошаги (Важный ресурс – частота процессора, т.е с какой частотой он может подавать сигнал STEP на перемещение драйверу). Когда одновременно включены две фазы, но их токи не равны, то положение равновесия ротора будет лежать не в середине шага, а в другом месте, определяемом соотношением токов фаз. Меняя соотношение, можно обеспечить некоторое количество микрошагов внутри одного шага. Для реализации микрошагового режима требуются более сложные драйверы, позволяющие задавать ток в обмотках с необходимым соотношением. Полушаговый режим является частным случаем микрошагового режима, но он не требует формирования ступенчатого тока питания катушек, поэтому часто реализуется.
 Микрошаговый режим обеспечивается путем получения поля статора, вращающегося более плавно, чем в полно- или полушаговом режимах. В результате обеспечиваются меньшие вибрации и практически бесшумная работа вплоть до нулевой частоты. Меньший угол шага способен обеспечить более точное позиционирование. Существует много различных микрошаговых режимов, с величиной шага от 1/3 полного шага до 1/512. Шаговый двигатель является синхронным электродвигателем. Это значит, что положение равновесия неподвижного ротора совпадает с направлением магнитного поля статора. При повороте поля статора ротор тоже поворачивается, стремясь занять новое положение равновесия.
Микрошаговый режим обеспечивается путем получения поля статора, вращающегося более плавно, чем в полно- или полушаговом режимах. В результате обеспечиваются меньшие вибрации и практически бесшумная работа вплоть до нулевой частоты. Меньший угол шага способен обеспечить более точное позиционирование. Существует много различных микрошаговых режимов, с величиной шага от 1/3 полного шага до 1/512. Шаговый двигатель является синхронным электродвигателем. Это значит, что положение равновесия неподвижного ротора совпадает с направлением магнитного поля статора. При повороте поля статора ротор тоже поворачивается, стремясь занять новое положение равновесия. Чтобы получить нужное направление магнитного поля, необходимо выбрать не только правильное направление токов в катушках, но и правильное соотношение этих токов.
Чтобы получить нужное направление магнитного поля, необходимо выбрать не только правильное направление токов в катушках, но и правильное соотношение этих токов.Смещение точки равновесия ротора говорит о том, что ротор можно зафиксировать в любой произвольной позиции. Для этого нужно лишь правильно установить отношение токов в фазах. Именно этот факт используется при реализации микрошагового режима.
Результатом использования микрошагового режима является более плавное вращение ротора на низких частотах. Для достижения высоких скоростей в микрошаговом режиме требуется высокая частота повторения микрошагов, которую не всегда может обеспечить управляющий микроконтроллер. Именно из-за этого происходит переход от 8-битной электроники к 32-битной, так как в дельта-принтерах для перемещения вдоль одной оси используется движение сразу 3 двигателей.
При осуществлении каждого шага ротор не сразу останавливается в новом положении равновесия, а осуществляет затухающие колебания вокруг положения равновесия. Время установления зависит от характеристик нагрузки и схемы драйвера. Обычно колебания являются нежелательными. Избавиться от этого явления можно используя микрошаговый режим. Ниже показаны перемещения ротора при работе в полношаговом и микрошаговом режимах.
 Видно, что в полношаговом режиме наблюдаются выбросы и колебания, в то время как в микрошаговом режиме их нет. Однако и в этом режиме график положения ротора отличается от прямой линии. Эта погрешность объясняется погрешностью геометрии деталей двигателя и может быть уменьшена путем проведения калибровки и последующей компенсации путем корректировки токов фаз.
Видно, что в полношаговом режиме наблюдаются выбросы и колебания, в то время как в микрошаговом режиме их нет. Однако и в этом режиме график положения ротора отличается от прямой линии. Эта погрешность объясняется погрешностью геометрии деталей двигателя и может быть уменьшена путем проведения калибровки и последующей компенсации путем корректировки токов фаз.При вращении ротора у двигателя есть мертвые зоны, которые ограничивают точность позиционирования.
 На рисунке показана зависимость зависимость момента от угла поворота ротора.
На рисунке показана зависимость зависимость момента от угла поворота ротора.Наличие мертвых зон является очень важным для микрошагового режима. Если, например, имеются мертвые зоны величиной d, то микрошаг величиной менее d вообще не сдвинет ротор с места.
Когда двигатель работает под нагрузкой, всегда существует некоторый сдвиг между угловым положением ротора и ориентацией магнитного поля статора. Особенно неблагоприятной является ситуация, когда двигатель начинает торможение и момент нагрузки реверсируется. Нужно отметить, что запаздывание или опережение относится только к положению, но не к скорости. В любом случае, если синхронность работы двигателя не потеряна, это запаздывание или опережение не может превышать величины двух полных шагов. Это очень приятный факт.
Каждый раз, когда шаговый двигатель осуществляет шаг, ротор поворачивается на S радиан. При этом минимальный момент имеет в место, когда ротор находится между соседними положениями равновесия.
 Этот момент называют рабочим моментом, он означает, какой наибольший момент может преодолевать двигатель при вращении с малой скоростью. Если двигатель делает шаг с двумя запитанными обмотками, то рабочий момент равен моменту удержания для одной запитанной обмотки.
Этот момент называют рабочим моментом, он означает, какой наибольший момент может преодолевать двигатель при вращении с малой скоростью. Если двигатель делает шаг с двумя запитанными обмотками, то рабочий момент равен моменту удержания для одной запитанной обмотки.Параметры привода зависят от характеристик нагрузки. Кроме трения, реальная нагрузка обладает инерцией. Инерция препятствует изменению скорости и требует от двигателя больших моментов на разгоне и торможении, ограничивая максимальное ускорение. С другой стороны, увеличение инерционности нагрузки увеличивает стабильность скорости.
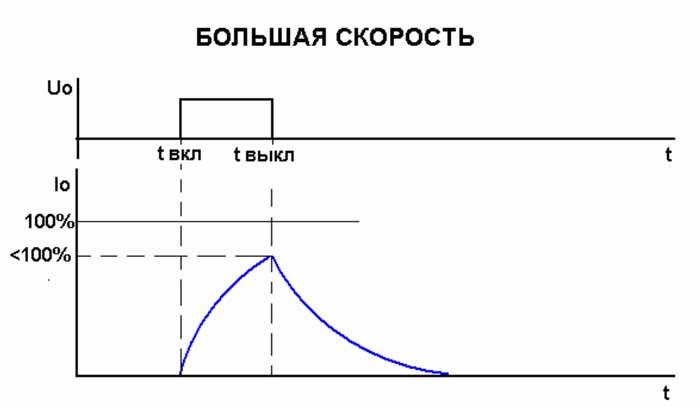
При конструировании драйверов шаговых двигателей нужно учитывать, что обмотки двигателя представляют собой индуктивность. Эта индуктивность определяет время нарастания и спада тока. Поэтому если к обмотке приложено напряжение прямоугольной формы, форма тока не будет прямоугольной. При низких скоростях (а) время нарастания и спада тока не способно сильно повлиять на момент, однако на высоких скоростях момент падает. Связано это с тем, что на высоких скоростях ток в обмотках двигателя не успевает достигнуть номинального значения(б).
 Для того, чтобы момент падал как можно меньше, необходимо обеспечить высокую скорость нарастания тока в обмотках двигателя, что достигается применением специальных схем питания.
Для того, чтобы момент падал как можно меньше, необходимо обеспечить высокую скорость нарастания тока в обмотках двигателя, что достигается применением специальных схем питания.Поведение момента при увеличении частоты коммутации фаз примерно такое: начиная с некоторой частоты среза момент монотонно падает. Обычно для шагового двигателя приводятся две кривые зависимости момента от скорости.
 Внутренняя кривая (кривая старта) показывает, при каком максимальном моменте трения для данной скорости шаговый двигатель способен тронуться. Эта кривая пересекает ось скоростей в точке, называемой максимальной частотой старта или частотой приемистости. Она определяет максимальную скорость, на которой ненагруженный двигатель может тронуться.
Внутренняя кривая (кривая старта) показывает, при каком максимальном моменте трения для данной скорости шаговый двигатель способен тронуться. Эта кривая пересекает ось скоростей в точке, называемой максимальной частотой старта или частотой приемистости. Она определяет максимальную скорость, на которой ненагруженный двигатель может тронуться.Внешняя кривая (кривая разгона) показывает, при каком максимальном моменте трения для данной скорости шаговый двигатель способен поддерживать вращение без пропуска шагов. Эта кривая пересекает ось скоростей в точке максимальной частоты разгона. Она показывает максимальную скорость для данного двигателя без нагрузки. Область, которая лежит между кривыми, называется областью разгона.
Для того, чтобы работать на большой скорости из области разгона, необходимо стартовать на низкой скорости из области старта, а затем выполнить разгон. При остановке нужно действовать в обратном порядке: сначала выполнить торможение, и только войдя в область старта можно прекратить подачу управляющих импульсов. В противном случае произойдет потеря синхронности и положение ротора будет утеряно.
Необходимо отметить, что непрерывная работа шагового двигателя на высокой скорости не всегда допустима ввиду нагрева ротора.
При осуществлении разгона или торможения важно правильно выбрать закон изменения скорости и максимальное ускорение. Ускорение должно быть тем меньше, чем выше инерционность нагрузки. Критерий правильного выбора режима разгона – это осуществление разгона до нужной скорости для конкретной нагрузки за минимальное время. Чаще всего применяют разгон и торможение с постоянным ускорением.
Реализация закона, по которому будет производится ускорение или торможение двигателя, обычно производится программно управляющим микроконтроллером, так как именно микроконтроллер обычно является источником тактовой частоты для драйвера шагового двигателя. Для генерации тактовой частоты удобно использовать аппаратный таймер, который имеется в составе того же процессора Arduino – Atmega2560. Когда двигатель вращается с постоянной скоростью, достаточно загрузить в таймер постоянное значение периода повторения шагов (длительность шага). Если же двигатель разгоняется или тормозится, этот период меняется с каждым новым шагом. При разгоне или торможении с постоянным ускорением частота повторения шагов должна изменяться линейно, соответственно значение периода, которое необходимо загружать в таймер, должно меняться по гиперболическому закону.
Резонанс
Шаговым двигателям свойственен нежелательный эффект, называемый резонансом. Эффект проявляется в виде внезапного падения момента на некоторых скоростях. Это может привести к пропуску шагов и потере синхронности. Эффект проявляется в том случае, если частота шагов совпадает с собственной резонансной частотой ротора двигателя.Когда двигатель совершает шаг, ротор не сразу устанавливается в новую позицию, а совершает затухающие колебания. Дело в том, что система ротор – магнитное поле – статор работает как пружинный маятник, частота колебаний которого зависит от момента инерции ротора (плюс нагрузки) и величины магнитного поля.
Резонансную частоту определяет момент инерции собственно ротора двигателя и момент инерции нагрузки на валу двигателя. Поэтому резонансная частота ротора ненагруженного двигателя, которая приводится среди параметров, имеет маленькую практическую ценность, так как любая нагрузка, подсоединенная к двигателю, изменит эту частоту.
Когда используется не микрошаговый режим, основной причиной появления колебаний является прерывистое вращение ротора. При осуществлении шага ротору толчком сообщается некоторая энергия. Этот толчок возбуждает колебания. Энергия, которая сообщается ротору в полушаговом режиме, составляет около 30% от энергии полного шага. Поэтому в полушаговом режиме амплитуда колебаний существенно меньше. В микрошаговом режиме с шагом 1/32 основного при каждом микрошаге сообщается всего около 0.1% от энергии полного шага. Поэтому в микрошаговом режиме явление резонанса практически незаметно.
Способы изменения направления тока
При работе шагового двигателя требуется изменение направления магнитного поля независимо для каждой фазы. Изменение направления магнитного поля может быть выполнено разными способами. В униполярных двигателях обмотки имеют отвод от середины или имеются две отдельные обмотки для каждой фазы. Направление магнитного поля меняется путем перключения половинок обмоток или целых обмоток. В этом случае требуются только два простых ключа A и B для каждой фазы. В биполярных двигателях направление меняется путем переполюсовки выводов обмоток. Для переполюсовки требуется полный H-мост (рисунок ниже). Управление ключами должно осуществляться логической схемой, реализующей нужный алгоритм работы. Предпологается, что источник питания схем имеет номинальное для обмоток двигателя напряжение.
В биполярных двигателях направление меняется путем переполюсовки выводов обмоток. Для переполюсовки требуется полный H-мост (рисунок ниже). Управление ключами должно осуществляться логической схемой, реализующей нужный алгоритм работы. Предпологается, что источник питания схем имеет номинальное для обмоток двигателя напряжение. После отключения индуктивности от источника питания ток не может мгновено прекратится. Возникает ЭДС (электродвижущая сила) самоиндукции, имеющая противоположное источнику питания направление.
После отключения индуктивности от источника питания ток не может мгновено прекратится. Возникает ЭДС (электродвижущая сила) самоиндукции, имеющая противоположное источнику питания направление.Для регулировки момента нужно регулировать силу тока в обмотках. В любом случае, ток должен быть ограничен, чтобы не превысить рассеиваимую мощность на омическом сопротивлении обмоток. Более того, в полушаговом режиме требуется в определенные моменты обеспечивать нулевое значение тока в обмотках, а в микрошаговом режиме вообще требуется задание разных значений тока.
При работе на больших скоростях требуется увеличивать скорость нарастания тока в обмотках, что возможно повышением напряжения источника питания. При этом максимальный ток обмотки должен быть ограничен резистором.
Еще одним методом стабилизации тока в обмотках двигателя является ключевое (ШИМ) регулирование. Это позволяет использовать простые и дешевые нестабилизированные источники питания.
Падение напряжения на этом резисторе зависит от тока в обмотке. Когда ток достигает установленного значения, ключ выключается, что приводит к падению тока. Когда ток спадает до нижнего порога, ключ снова включается. Этот процесс повторяется периодически, поддерживая среднее значение тока постоянным.
 Управляя Uref можно регулировать ток фазы, например, увеличивать его при разгоне и торможении и снижать при работе на постоянной скорости. Это напряжение мы и регулируем на драйвере подстроечным резистором.
Управляя Uref можно регулировать ток фазы, например, увеличивать его при разгоне и торможении и снижать при работе на постоянной скорости. Это напряжение мы и регулируем на драйвере подстроечным резистором.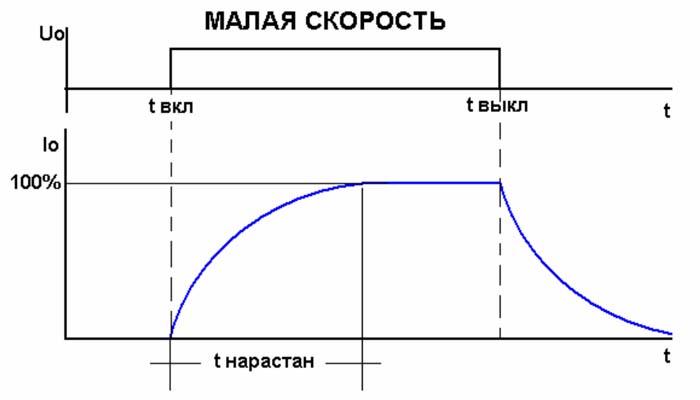
 Подстроечным резистором мы регулируем время включения и выключения ключа, т.е. время на отработку микрошага. У того же А4988 имеется автоматическая регулировка спада тока.
Подстроечным резистором мы регулируем время включения и выключения ключа, т.е. время на отработку микрошага. У того же А4988 имеется автоматическая регулировка спада тока.Шаговый двигатель это, как понятно из его названия, двигатель который вращается дискретными перемещениями. Достигается это за счет хитрой формы ротора и двух (реже четырех) обмоток. В результате чего, путем чередования направления напряжения в обмотках можно добиться того, что ротор будет по очереди занимать фиксированные значения.
В среднем, у шагового двигателя на один оборот вала, приходится около ста шагов. Но это сильно зависит от модели двигателя, а также от его конструкции. Кроме того, существуют полушаговый и микрошаговый режим, когда на обмотки двигателя подают ШИМованное напряжение, заставляющее ротор встать между шагами в равновесном состоянии, которое поддерживается разным уровнем напряжения на обмотках. Эти ухищрения резко улучшают точность, скорость и бесшумность работы, но снижается момент и сильно увеличивается сложность управляющей программы — надо ведь расчитывать напряжения для каждого шага.
Один из недостатков шаговиков, по крайней мере для меня, это довольно большой ток. Так как на обмотки напруга подается все время, а такого явления как противоЭДС в нем, в отличии от коллекторных двигателей, не наблюдается, то, по сути дела, мы нагружаемся на активное сопротивление обмоток, а оно невелико. Так что будь готов к тому, что придется городить мощный драйвер на MOSFET транзисторах или затариваться спец микросхемами.
Типы шаговых двигателей
Если не углубляться во внутреннюю конструкцию, число шагов и прочие тонкости, то с пользовательской точки зрения существует три типа:
- Биполярный — имеет четыре выхода, содержит в себе две обмотки.
- Униполярный — имеет шесть выходов. Содержит в себе две обмотки, но каждая обмотка имеет отвод из середины.
- Четырехобмоточный — имеет четыре независимые обмотки. По сути дела представляет собой тот же униполярник, только обмотки его разделены. Вживую не встречал, только в книжках.
Где взять шаговый двигатель.
Вообще шаговики встречаются много где. Самое хлебное место — пятидюймовые дисководы и старые матричные принтеры. Еще ими можно поживиться в древних винчестерах на 40Мб, если, конечно, рука поднимется покалечить такой антиквариат.
А вот в трехдюймовых флопарях нас ждет облом — дело в том, что там шаговик весьма ущербной конструкции — у него только один задний подшипник, а передним концом вал упирается в подшипник закрепленный на раме дисковода. Так что юзать его можно только в родном креплении. Либо городить высокоточную крепежную конструкцию. Впрочем, тебе может повезет и ты найдешь нетипичный флопарь с полноценным движком.
Схема управления шаговым двигателем
Я разжился контроллерами шаговиков L297 и мощным сдвоенным мостом L298N.
Лирическое отступление, при желании можно его пропустить
Именно на нем был сделан мой первый силовой блок робота. Кроме него там еще два источника питания на 5 и на 3.3 вольта, а также контроллер двух движков на L293 (такой же как и во второй реализации силового блока). В качестве контроллера тогда был выбран АТ89С2051. Это антикварный контроллер архитектуры MSC-51 в котором из периферии только два таймера, порты да UART, но я его люблю нежно и трепетно, так как первая любовь не проходит никогда =). К сожалению исходники его мега прошивки канули в Лету вместе с убившимся винтом, так что я не могу поделиться теми извращенскими алгоритмами, которые были туда засунуты. А там был и двухканальный ШИМ, и I2C Slave протокол, и контроль за положением шаговика с точным учетом его перемещения. Короче, знатный был проект. Ныне валяется трупом, т.к. все лень запустить Keil uVision и написать новую прошивку. Да и ассемблер С51 я стал уже забывать.
Схема включения L298N+L297 до смешного проста — надо тупо соединить их вместе. Они настолько созданы друг для друга, что в даташите на L298N идет прямой отсыл к L297, а в доке на L297 на L298N.
Осталось только подключить микроконтроллер.
- На вход CW/CCW подаем направление вращения — 0 в одну сторону, 1 — в другую.
- на вход CLOCK — импульсы. Один импульс — один шаг.
- вход HALF/FULL задает режим работы — полный шаг/полушаг
- RESET сбрасывает драйвер в дефолтное состояние ABCD=0101.
- CONTROL определяет каким образом задается ШИМ, если он в нуле, то ШИМ образуется посредством выходов разрешения INh2 и INh3, а если 1 то через выходы на драйвер ABCD. Это может пригодится, если вместо L298 у которой есть куда подключать входы разрешения INh2/INh3 будет либо самодельный мост на транзисторах, либо какая-либо другая микросхема.
- На вход Vref надо подать напряжение с потенциометра, которое будет определять максимальную перегрузочную способность. Подашь 5 вольт — будер работать на пределе, а в случае перегрузки сгорит L298, подашь меньше — при предельном токе просто заглохнет. Я вначале тупо загнал туда питание, но потом передумал и поставил подстроечный резистор — защита все же полезная вещь, плохо будет если драйвер L298 сгорит.
Если же на защиту пофигу, то можешь заодно и резисторы, висящие на выходе sense выкинуть нафиг. Это токовые шунты, с них L297 узнает какой ток течет через драйвер L298 и решает сдохнет он и пора отрубать или еще протянет. Там нужны резисторы помощней, учитывая что ток через драйвер может достигать 4А, то при рекомендуемом сопротивлении в 0.5 Ом, будет падение напряжения порядка 2 вольт, а значит выделяемая моща будет около 4*2=8 Вт — для резистора огого! Я поставил двухваттные, но у меня и шаговик был мелкий, не способный схавать 4 ампера.
Документация по микросхемам:
Драйвер шагового двигателя – RepRap
Для запуска шагового двигателя необходимо использовать
- возможно A4988
- или возможно DRV8825
- или, возможно, Trinamic TMC2130
Вы можете купить любой из них в магазине по вашему выбору.
иначе читайте дальше,
- чип драйвера степпера или
- – микроконтроллер и, необязательно, один или два полных чипа h-bridge.
Привод шаговых двигателей
Шаговый драйвер
Эти микросхемы держат питание, которое приводит в движение двигатели, отдельно от питания, которое есть на Arduino.Arduino не может обеспечить достаточное количество сока для непосредственного питания шаговых двигателей. Вот почему вы должны использовать отдельные чипы, чтобы действовать как клапаны, управляющие вращением двигателя.
Другое преимущество, которое обеспечивают микросхемы шагового драйвера, состоит в том, что они обеспечивают дробных шагов. Это помогает сгладить движение шагового двигателя. Без дробных шагов шаговые двигатели могут иметь тенденцию вибрировать или резонировать на определенных оборотах.
Шаговые драйверы на базе микроконтроллера
Шаговые драйверы на основе микроконтроллерамогут достигать очень высоких скоростей вращения шаговых двигателей.Используя микроконтроллер, можно максимально контролировать то, как каждая отдельная катушка находится под напряжением внутри двигателя. Это абсолютно необходимо для получения высоких скоростей, поскольку при увеличении скорости синхронизация запуска катушек должна быть идеально синхронизирована. Цитирую от доктора Игуана:
- Если вы когда-либо толкали кого-то на качелях, вы знаете, что небольшой, своевременный толчок может заставить этого человека качаться все выше и выше. Пропустите один или два толчка даже на небольшую величину, и «передача мощности» значительно меньше.Это ситуация с шаговыми двигателями на высоких скоростях. Если вы не сопоставите толчки или шаги с фактическим состоянием двигателя, он будет работать плохо.
Для обработки тока, превышающего допустимый для микропроцессора, контроллеру необходимо использовать полные микросхемы H-моста.
Обычно H-мост используется для управления простым старым двигателем постоянного тока, но в этом случае микросхемы h-моста используются для точного контроля количества электричества, которое поступает на каждую отдельную катушку шагового двигателя.Таким образом, для биполярных шаговых двигателей требуется 2 чипа на двигатель.
Драйверы Stepper с открытым исходным кодом
AVRSTMD
AVRSTMD – это шаговый драйвер на основе микроконтроллера с открытым исходным кодом. Он использует процессор atmega48 и два чипсета h-bridge с ограничением тока National Semiconductor LMD18245T.
Доктор Игуана
Шаговый драйвер Dr. Iguana основан на микроконтроллере dsPic33 и двух микросхемах H-Bridge L298N. Он может развивать скорость до 800 об / мин. Очень хороший источник информации о шаговых драйверах микроконтроллера можно найти здесь на его веб-сайте вместе со всеми схемами, файлами gerber, исходным кодом и спецификацией для шагового драйвера.
Доктор Игуана. «Лучший DIY драйвер шагового двигателя». Серия страниц (и видео), в которых даются советы по проектированию высокоскоростного шагового двигателя.
RepRap Драйвер шагового двигателя v1.x
Первое поколение драйверов шаговых двигателей RepRap. (Примечание. Эти платы использовались в коллекции электроники поколения 2.) Используется комбинация драйвера шагового двигателя L297 / L298. Half-шаговый. Ручки до 2А. Все через отверстие. Хороший, солидный водитель. В нем используется какая-то старая технология, поэтому она не такая причудливая, как новые степперы, но она выполняет свою работу.Прочитайте страницу документации здесь
RepRap Драйвер шагового двигателя v2.x
Второе поколение драйверов шаговых двигателей RepRap. (Примечание: эти платы использовались в коллекции электроники поколения 3, но могли быть ретроградными до поколения 2.)
Использует чип Allegro A3982, который делает кучу приятных вещей и делает плату намного проще. Это также снижает цену на 10 долларов по сравнению с серией v1.x. Он может выдержать до 2А и делает полшага.Единственным недостатком является то, что это SMT, что может быть немного страшно для людей. Все это большие SMT-детали, поэтому паять довольно просто, особенно с помощью метода пайки / горячей пластины. Прочитайте страницу документации здесь.
Трехосевой шаговый драйвер PSMD имеет все те же разъемы и является совместимой по выводам альтернативой драйвера шагового двигателя RepRap v2.x.
Шаговые драйверы и шаговые контроллеры
Для запуска шагового двигателя обычно требуются две вещи: контроллер для создания сигналов шага и направления (обычно при ± 5 В) и схема управления, которая может генерировать ток, необходимый для привода двигателя.В некоторых случаях очень маленький шаговый двигатель может приводиться в движение непосредственно от контроллера, или схемы контроллера и драйвера могут быть объединены на одной плате.
Контроллер шагового привода управляет 3-мя проводами – традиционно обозначенными как «step», «dir», «GND» – которые передают информацию о движении в драйвер шагового двигателя. (Часто эти 3 линии оптоизолированы в передней части шагового привода). Шаговый контроллер, как правило, является чисто цифровым логическим устройством и требует относительно небольшой мощности.
Шаговый драйвер подключается к 4 толстым проводам шагового двигателя.Он содержит большие силовые транзисторы и требует толстого силового кабеля к источнику постоянного тока, потому что вся мощность для привода двигателей проходит через него.
ШИМ и шаговые драйверы
Подавляющее большинство шаговых драйверов подключено к какому-либо контроллеру с трехпроводным интерфейсом: контроллер пульсирует вывод STEP для перемещения двигателя на один шаг (*), контроллер устанавливает вывод DIR, чтобы выбрать, является ли шаг шагом по часовой стрелке или шаг против часовой стрелки и общий вывод GND.
Из Википедии: Pulse-width_modulation: Широтно-импульсная модуляция (ШИМ) является очень эффективным способом обеспечения промежуточных количеств электрической энергии между полностью включенным и полностью выключенным.Простой выключатель питания с типичным источником питания обеспечивает полную мощность только при включении. ШИМ – сравнительно недавняя технология
. 
Описание драйвера шагового двигателя
Программное обеспечение контроллера шагового двигателя
| |||||||||

 Скачать контроллер шагового двигателя
Скачать контроллер шагового двигателя


Драйверы шагового двигателя с входом переменного тока

переменного тока обеспечивают превосходные характеристики крутящего момента в широком диапазоне скоростей, от низких до высоких скоростей, обеспечивая большое соотношение скоростей. Поддерживает управление по замкнутому контуру без настройки усиления или проблем с охотой при использовании с двигателем AlphaStep AZ Series (абсолютный механический энкодер) или двигателем AlphaStep AR Series (встроенный резольвер) для превосходного управления. RKII Series (разомкнутый контур) идеально подходит для требовательных приложений, где обратная связь не требуется.
Все драйверы шагового двигателя с входом переменного тока оснащены усовершенствованным микропереходным управлением Oriental Motor (Smooth Drive). Эти драйверы доступны в виде импульсных входов или хранимых данных (сеть) через нашу группу продуктов FLEX и предлагают электромагнитное управление тормозом для вертикальных операций.
Используйте драйверы AlphaStep Closed Loop во всех наших продуктах на основе Actuator в качестве общей платформы для упрощения проводки, повышения производительности машины и работы в сети.
- Импульсный вход, Импульсный вход с интерфейсом RS-485, Сохраненные данные (сеть), EtherNet / IP ™ или EtherCAT-совместимые типы
- Однофазный или трехфазный вход
- с замкнутым или разомкнутым контуром
![]()
![]()
EtherNet / IP ™ является товарным знаком ODVA
Драйверы шагового двигателя с входом постоянного тока

Доступные в широком диапазоне входов постоянного тока, наши драйверы шаговых двигателей постоянного тока доступны с теми же функциями, что и в наших популярных драйверах входов переменного тока.
Кроме того, мы предлагаем драйверы ввода постоянного тока, специально разработанные для OEM-приложений. Уровень платы CVD является превосходным микрошаговым драйвером, обеспечивающим лучшую в отрасли характеристику крутящего момента, высокую точность даже при микрошаге и сверхнизкие вибрационные характеристики благодаря усовершенствованной функции микропереключения (плавное движение). Доступный в 2-фазном или 5-фазном.
Используйте драйверы с обратной связью во всех наших продуктах на основе приводов в качестве общей платформы для упрощения проводки, повышения производительности машины и работы в сети.
- OEM (тип платы / карты) или тип коробки
- Импульсный вход, Импульсный вход с интерфейсом RS-485, Сохраненные данные (сеть), EtherNet / IP ™, EtherCAT-совместимые типы или многоосевые * типы
- AlphaStep с замкнутым контуром, 2-фазные и 5-фазные шаговые двигатели
- 24 В постоянного тока, 48 В постоянного тока или 75 В постоянного тока Вход
![]()
![]()
![]()
![]() *
*
Типы драйверов шаговых двигателей
Доступны драйверы, которые работают в режиме импульсного ввода и в режиме встроенного контроллера.Вы можете выбрать желаемую комбинацию в соответствии с требуемой операционной системой.
Драйверы импульсного ввода
Шаговым двигателем можно управлять с помощью генератора импульсов, предоставленного пользователем. Рабочие данные заранее вводятся в генератор импульсов. Затем пользователь выбирает данные операции на главном программируемом контроллере, а затем вводит команду операции.
Драйверы встроенного контроллера (хранимые данные или хранимая программа)
Встроенная функция генерации импульсов позволяет приводить двигатель в действие через напрямую подключенный персональный компьютер или программируемый контроллер.Поскольку не требуется отдельного генератора импульсов, драйверы этого типа экономят место и упрощают подключение.
Разница между характеристиками входа переменного и постоянного тока
Шаговый двигатель приводится в действие постоянным напряжением, подаваемым через драйвер. В системах с входным двигателем 24 В постоянного тока и приводом от двигателя 24 В постоянного тока подается на двигатель. В системах двигателя и привода 100-115 В переменного тока вход выпрямляется до постоянного тока, а затем к двигателю подается приблизительно 140 В постоянного тока (некоторые продукты являются исключениями из этого.)
Эта разница в напряжении, приложенном к двигателям, проявляется как разница в характеристиках крутящего момента на высоких скоростях. Это связано с тем, что чем выше приложенное напряжение, тем быстрее будет возрастать ток через обмотки двигателя, что облегчает подачу номинального тока на более высоких скоростях. Таким образом, входной двигатель переменного тока и система привода имеют превосходные характеристики крутящего момента в широком диапазоне скоростей, от низких до высоких скоростей, предлагая большое соотношение скоростей.
Рекомендуется, чтобы входные двигатели переменного тока и системы привода, которые совместимы в более широком диапазоне рабочих условий, чем системы ввода постоянного тока, рассматривались для вашего применения.
Сравнение продукции с шаговым двигателем
,
5-фазный драйвер шагового двигателя
RKII Series Драйверы 5-фазного шагового двигателя (вход переменного тока)

Драйвер шагового двигателя серии RKII – это высокоэффективный энергосберегающий драйвер шагового двигателя с очень низкой ценой. Для достижения постоянного максимального выходного крутящего момента при низком тепловыделении и экономии энергии потери шагового двигателя и привода были существенно снижены, что позволяет работать в течение более продолжительных часов на высокой скорости, что невозможно при использовании обычных шаговых двигателей и драйверов.Благодаря простой проводке с безвинтовыми разъемами и монтажу драйвера рядом друг с другом, установка проста и экономит место.
- Высокая эффективность, Низкая вибрация, Микрошаговый драйвер шагового двигателя
- Тип хранимых данных (совместимый с сетью) или тип импульсного входа (используйте шаговый угловой переключатель для приема импульсных сигналов 1,8 °)
- Встроенные защитные функции
- однофазный 100-120 или однофазный 200-240 В перем. Тока
CVD Series 5-фазный драйвер шагового двигателя (вход постоянного тока)

5-фазный привод с шаговым двигателем CVD обладает превосходными характеристиками и ценностью и идеально подходит для OEM или одноосных станков.Предложение драйверов шагового двигателя CVD:
- Низкая вибрация и шум с усовершенствованным микрошаговым управлением
- Значительно повышает точность позиционирования при микрошаге
- Маленький, тонкий микрошаговый накопитель с компактными полевыми транзисторами
- Выбор угла наклона и управление микрошаговым фильтром
- Сигнализация
- 24 В пост. Тока, вход
- 0,35 ~ 3,8 А / Фаза
CRD серии 5-фазный драйвер шагового двигателя (вход постоянного тока)

Драйвер 5-фазного шагового двигателя CRD со встроенным контроллером типа сохраненных данных или сохраненной программы – это компактный 5-фазный драйвер / контроллер для 5-фазных шаговых двигателей нового типа Пентагона.Тип «Сохраненные данные» совместим с сетью и работает с линейкой продуктов FLEX для обеспечения связи, а тип «Сохраненные данные» предоставляет расширенные возможности программирования. Оба типа поддерживают наименьшую вибрацию благодаря использованию 5-фазного двигателя, усовершенствованного микрошагового управления и имеют множество функций управления.
- Сохраненные данные (сеть) или сохраненная программа типа
- 5-фазный, с низким уровнем вибрации, микрошаговый драйвер
- Экономия места
- 24 В пост. Тока / 0.35 ~ 1,4 А
Speed Control Шаговые двигатели и драйверы

Система контроля скорости серии CV CVK предлагает простую конфигурацию, состоящую из шагового двигателя, привода и программируемого контроллера. Рабочая скорость, время ускорения и замедления, рабочий ток могут быть установлены с помощью переключателей привода, и простое переключение входа FWD (RVS) в положение ON или OFF позволяет легко управлять.
- Генератор импульсов не требуется
- Возможны 2 режима скорости
- Компактный шаговый двигатель с высоким крутящим моментом
Типы драйверов шаговых двигателей
Доступны драйверы, которые работают в режиме импульсного ввода и в режиме встроенного контроллера.Вы можете выбрать желаемую комбинацию в соответствии с требуемой операционной системой.
Драйверы с импульсным вводом
Шаговым двигателем можно управлять с помощью генератора импульсов, предоставленного пользователем. Рабочие данные заранее вводятся в генератор импульсов. Затем пользователь выбирает данные операции на главном программируемом контроллере, а затем вводит команду операции.
Драйверы встроенного контроллера (хранимые данные или хранимая программа)
Встроенная функция генерации импульсов позволяет приводить двигатель в действие через напрямую подключенный персональный компьютер или программируемый контроллер.Поскольку не требуется отдельного генератора импульсов, драйверы этого типа экономят место и упрощают подключение.
Разница между характеристиками входа переменного и постоянного тока
Шаговый двигатель приводится в действие постоянным напряжением, подаваемым через драйвер. В системах с входным двигателем 24 В постоянного тока и приводом от двигателя 24 В постоянного тока подается на двигатель. В системах двигателя и привода 100-115 В переменного тока вход выпрямляется до постоянного тока, а затем к двигателю подается приблизительно 140 В постоянного тока (некоторые продукты являются исключениями из этого.)
Эта разница в напряжении, приложенном к двигателям, проявляется как разница в характеристиках крутящего момента на высоких скоростях. Это связано с тем, что чем выше приложенное напряжение, тем быстрее будет возрастать ток через обмотки двигателя, что облегчает подачу номинального тока на более высоких скоростях. Таким образом, входной двигатель переменного тока и система привода имеют превосходные характеристики крутящего момента в широком диапазоне скоростей, от низких до высоких скоростей, предлагая большое соотношение скоростей.
Рекомендуется, чтобы входные двигатели переменного тока и системы привода, которые совместимы в более широком диапазоне рабочих условий, чем системы ввода постоянного тока, рассматривались для вашего применения.
Сравнение продуктов с 5-фазным шаговым двигателем
,
Больше новостей
