
Драйверы шаговых двигателей KIPPRIBOR · Овен-Уфа — средства автоматизации производства
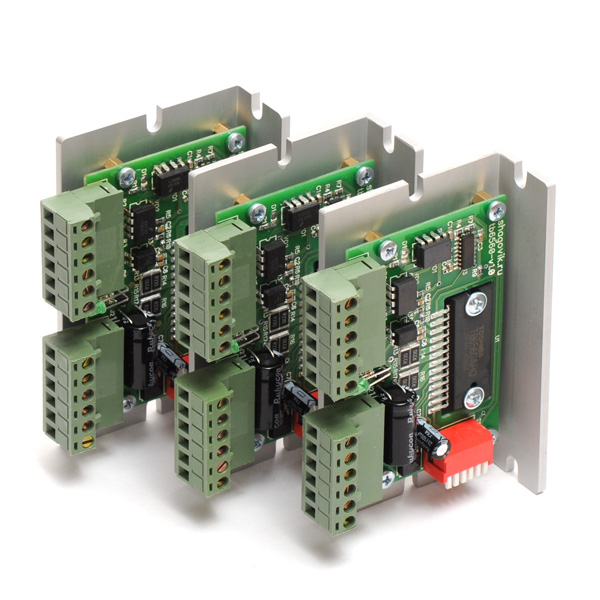
Драйверы шаговых двигателей KIPPRIBOR серии SMD предназначены для управления шаговыми двигателями. Драйвер позволяет интерпретировать команды контроллера в последовательность коммутационных состояний выходных элементов, питающих обмотки шагового двигателя. Таким образом происходит преобразование команд контроллера во вращательное движение ротора двигателя, причем параметры преобразования четко заданы драйвером с учетом характеристик подключенного двигателя.
Основные особенности драйверов гибридных шаговых двигателей KIPPRIBOR серии SMD:
- Драйверы серии SMD построены с применением прогрессивных технологий построения шагового привода и современной элементной базы, в том числе с применением 32-битного DSP-процессора.
- Все драйверы имеют оптическую развязку силовых цепей, что предотвращает повреждение контроллера и двигателя в резуль-тате пробоя силового ключа.
- Максимальная частота управляющих импульсов 200 кГц.
- Дискретное ограничение фазного тока обмоток позволяет согласовать драйвер с конкретным двигателем.
- Функция микрошагового режима управления с коэффициентом до 1/256 для повышения точности позиционирования.
- Функция снижения уровня шума и вибраций.
- В линейке представлены драйверы с питанием от источника постоянного тока и с универсальным питанием.
Технические характеристики драйверов гибридных шаговых двигателей KIPPRIBOR серии SMD:
| Параметр | Значение | |||||
| Модификация драйвера | SMD-M430D | SMD-DM542 | SMD-M545D | SMD-DM556D | SMD-M860D | SMD-DM860D |
| Напряжение питания драйвера | 18…40 VDC | 18…50 VDC | 24…50 VDC | 24…50 VDC | 24…80 VDC | 24…80 VDC/ 20…60 VAC |
| Максимальная частота управляющих импульсов | 100 кГц | 200 кГц | 200 кГц | 200 кГц | 200 кГц | 200 кГц |
| Максимальный ток фазы шагового двигателя | 3 А | 4,2 А | 4,5 А | 5,6 А | 7,2 А | 7,2 А |
| Количество установок микрошагового режима | 7 | 15 | 14 | 16 | 14 | 16 |
| Максимальный коэффициент деления шага | 1/64 | 1/128 | 1/256 | 1/256 | 1/256 | 1/256 |
| Оптическая развязка силовых цепей драйвера | Да | |||||
| Дополнительные функции | Понижение шума, понижение вибраций, функция защиты двигателя | |||||
Габаритные и установочные размеры драйверов шаговых двигателей KIPPRIBOR серии SMD:
SMD-M430D
SMD-M545D, SMD-DM542, SMD-DM556D
SMD-DM860D
Схемы подключения драйверов шаговых двигателей KIPPRIBOR серии SMD:
SMD-M430D | SMD-DM542 | SMD-M545D |
SMD-DM556D | SMD-M860D | SMD-DM860D |
Если вы нашли ошибку, пожалуйста, выделите фрагмент текста и нажмите Ctrl+Enter.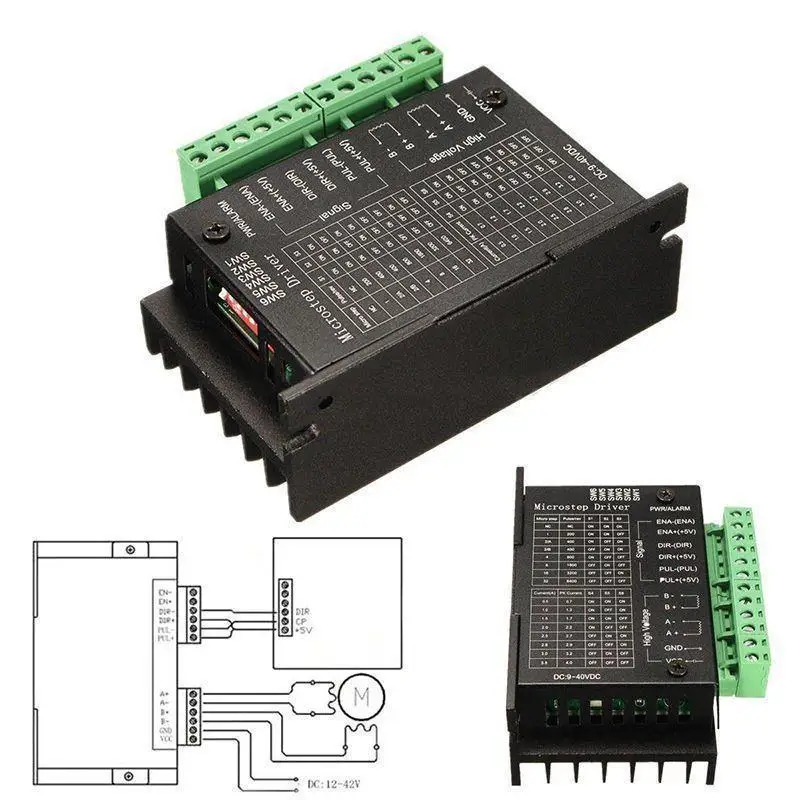
Статьи о роботах » Драйверы шаговых двигателей A4988 и DVR8825
В статье мы разберем режимы управления вращением шаговых двигателей. Подробно рассмотрим п одключение драйвера A4988.
Шаговые моторы имеют три режима управления вращением: полношаговый, полушаговый и микрошаговый.
Во время полношагового режима шаговые моторы для поворота мотора на 360 градусов делают 200 шагов, во время полушагового – 400, а во время микрошагового возможно делить шаг на 4, 8 и даже 16 частей. Техника управления микрошаговым режимом сложна, поэтому многие производители станков ЧПУ (CNC) и качественных 3D принтеров стали изготавливать специальные контроллеры для управления шаговыми двигателями, часто называемых драйверами шаговых моторов. Ещё их называют StepStick.
Функционирование специальных контроллеров управления (драйверов шаговых двигателей) происходит следующим образом: вначале напряжение питания поступает на шаговый двигатель, затем на логическую часть драйвера шаговика, после этого задается направление вращения и команда (ШАГ) по управляющим контактам на двигателе.
Зачастую у продаваемых контроллеров шаговых двигателей (например: RAMPS 1.4) предустановлен режим микрошага 1/16. Чтобы регулировать подаваемое на шаговый мотор напряжение питания, на котроллере RAMPS 1.4 установлен специальный переменный резистор. Он является важным элементом, поскольку шаговики могут быть под 8V, 4V, 12V и д.р.
Для платы RAMPS 1.4 выпускают два вида драйверов A4988 и DVR8825. Они отличаются током, выдаваемым на шаговый двигатель и минимальным микрошагом.
И не только. Выпускаются несколько других драйверов шаговых двигателей, которые могут быть использованы в качестве альтернативы. Например, у драйвера шагового двигателя Pololu A4988 Black Edition производительность на 20% выше. Есть также большая версия драйвера на A4988, которая имеет защиту от обратной мощности на главном входе питания, а также встроенной 5 В и 3.
Рассмотрим драйвер A4988.
Характеристики драйвера A4988
- Минимальный микрошаг 1/16 шага
Величина тока регулируется подстроечным резистором на драйвере. Вращение по часовой стрелке – повышение тока. Вращение против часовой стрелки – понижение величины тока.
Установка микрошага производится перемычками установленными на RAMPS 1.4
Схема драйвера A4988
Подключение драйвера A4988
Для работы с драйвером A4988 необходимо питание логического уровня (3 – 5. 5 В), подаваемое на выводы VDD и GND, а также питание двигателя (8 – 35 В) на выводы VMOT и GND. Чтобы обеспечить необходимый потребляемый ток (при пиковых до 4 А), необходимо поставить конденсаторы для гальванической развязки как можно ближе к плате.
5 В), подаваемое на выводы VDD и GND, а также питание двигателя (8 – 35 В) на выводы VMOT и GND. Чтобы обеспечить необходимый потребляемый ток (при пиковых до 4 А), необходимо поставить конденсаторы для гальванической развязки как можно ближе к плате.
Внимание: В плате используются керамические конденсаторы с низким эквивалентным последовательным сопротивлением, что делает её уязвимой для индуктивно-ёмкостных скачков напряжения, особенно если питающие провода длиннее нескольких сантиметров. В некоторых случаях, эти скачки могут превысить максимально допустимое значение (35 В для A4988) и повредить плату. Одним из способов защиты платы от подобных скачков является установка большого (не меньше 47 мкФ) электролитического конденсатора между выводом питания (VMOT) и землёй близко к плате.
При правильном подключении, через Pololu A4988 можно управлять четырёх-, шести- и восьми- проводными шаговыми двигателями.
Внимание: Соединение или разъединение шагового двигателя при включённом драйвере может привести к поломке двигателя.
Установка микрошага
У шаговых двигателей обычно установлена конкретная величина (например 1,8° или 200 шагов на оборот), при которой достигается полный оборот в 360°. Микрошаговый драйвер, такой как A4988 позволяет увеличить разрешение за счёт возможности управления промежуточными шагами. Это достигается путём возбуждения обмоток средней величины тока. Например, управление мотором в режиме четверти шага даст двигателю с величиной 200-шагов-за-оборот уже 800 микрошагов при использовании разных уровней тока.
Разрешение (размер шага) задаётся комбинациями переключателей на входах (MS1, MS2, и MS3). С их помощью можно выбрать пять различных шагов, в соответствии с таблицей ниже. На входы MS1 и MS3 переключателя установлены 100 кОм подтягивающие на землю резисторы, а на MS2 – 50 кОм, и если оставить их не подключёнными, двигатель будет работать в полношаговом режиме. Для правильной работы в режиме микрошага необходим слабый ток (см. ниже), который обеспечивается ограничителями по току. В противном случае, промежуточные уровни будут некорректно восприниматься, и двигатель будет пропускать микрошаги.
В противном случае, промежуточные уровни будут некорректно восприниматься, и двигатель будет пропускать микрошаги.
Обычно для домашних 3D принтеров и станков ЧПУ используются драйверы A4988 с микрошагом 1/16. Для этого все перемычки на плате RAMPS 1.4 должны быть установлены на свои гнезда.
Входы управления
Каждый импульс на входе STEP соответствует одному микрошагу двигателя, направление вращения которого зависит от сигнала на выводе DIR. Обратите внимание, что выводы STEP и DIR не подтянуты к какому-либо конкретному внутреннему напряжению, поэтому вы не должны оставлять эти выводы плавающими при создании приложений. Если вы просто хотите вращать двигатель в одном направлении, вы можете соединить DIR непосредственно с VCC или GND. Чип имеет три различных входа для управления состоянием питания: RST, SLP и EN. Обратите внимание, что вывод RST плавает; если вы его не используете, вы можете подключить его к соседнему контакту SLP на печатной плате, чтобы подать на него высокий уровень и включить плату.
Ограничение тока
Для достижения высокой скорости шага, питания двигателя, как правило, гораздо выше, чем это было бы допустимо без активного ограничения тока. Например, типичный шаговый двигатель может иметь максимальный ток 1 А с 5 Ом; сопротивлением обмотки, отсюда максимально допустимое питание двигателя равно 5 В (U=I*R). Использование же такого двигателя с питанием 12 В позволит повысить скорость шага. Однако чтобы предотвратить повреждение двигателя, необходимо ограничить ток до уровня ниже 1 А.
Драйвер A4988 поддерживает активное ограничение тока, которое можно установить подстроечным потенциометром на плате.
Один из способов установить предельный ток – подключить драйвер в полношаговый режим и измерять ток, протекающий через одну обмотку двигателя без синхронизации по входу STEP. Измеренный ток будет равен 0,7 части предельного тока (так как обе обмотки всегда ограничиваются примерно на 70% от текущей настройки предельного тока в полношаговом режиме).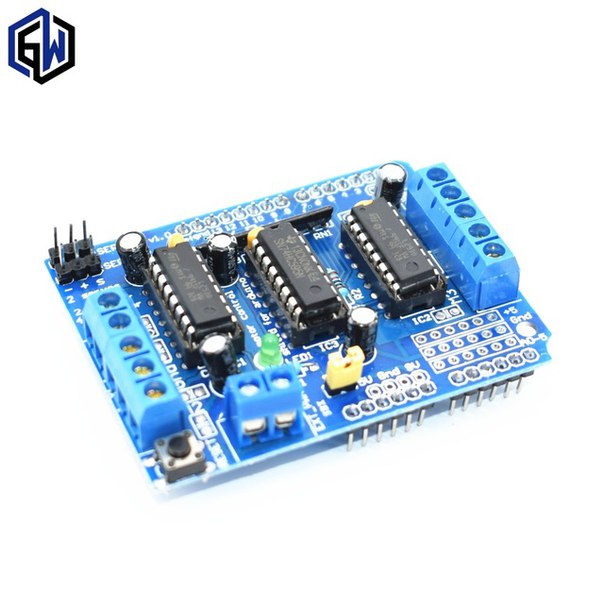 Учтите, что при изменении логического напряжения Vdd, на другое значение, изменит предельный ток, поскольку напряжение на выводе “ref” является функцией Vdd.
Учтите, что при изменении логического напряжения Vdd, на другое значение, изменит предельный ток, поскольку напряжение на выводе “ref” является функцией Vdd.
Еще один способ установить предельный ток – измерить напряжение на выводе “ref” и вычислить полученное ограничение тока (резисторы SENSE равны 0,05 Ом). Напряжение вывода доступно через металлизированное сквозное отверстие (в кружке на шёлкографии печатной платы). Ограничение тока относится к опорному напряжению следующим образом:
Current Limit = VREF × 2,5
Например: опорное напряжение равно 0,3 В, предельный ток 0,75 А. Как упоминалось выше, в режиме полного шага, ток через катушки ограничен 70% от текущего предела, поэтому, чтобы получить полный шаг тока катушки в 1 А, текущий предел должен быть 1 A / 0,7 = 1,4 А, что соответствует VREF 1,4 A / 2,5 = 0,56 В. Смотрите спецификацию A4988 для получения дополнительных сведений.
Примечание: Ток обмотки может сильно отличаться от тока источника питания, поэтому не следует измерять ток на источнике питания, чтобы установить ограничение тока. Подходящим местом для измерения тока является одна из обмоток вашего шагового двигателя.
Подходящим местом для измерения тока является одна из обмоток вашего шагового двигателя.
Величину тока на драйвере шагового мотора настроить и опытным путём. Необходимо устроить прогон 3D принтера на высокой скорости по всем координатам. Оптимальным считается, когда шаговые двигатели уже не гудят и ещё не пропускают шаги.
Внимание: При регулировке тока подстроечным резистором на драйвере A4988. Вращение по часовой стрелке – повышение тока. Вращение против часовой стрелки – понижение величины тока.
Максимально допустимый ток подаваемый на обмотку, у микросхемы A4988 равен 2 A. Фактический ток, который можно подать на плату, зависит от качества охлаждения микросхемы. Плата разработана с учётом отвода тепла от микросхемы, но при токе выше 1 A на обмотку необходим теплоотвод или другое дополнительное охлаждение.
Внимание: плата драйвера может нагреться так, что можно получить ожог, задолго до того как перегреется сама микросхема. Будьте осторожны при обращении с платой и со всеми подключёнными к ней устройствами.
Будьте осторожны при обращении с платой и со всеми подключёнными к ней устройствами.
Обратите внимание, что ток, измеренный на источнике питания, как правило, не соответствует величине тока на обмотке. Так как напряжение, подаваемое на драйвер, может быть значительно выше напряжения на обмотке, то, соответственно, измеряемый ток на источнике питания может быть немного ниже, чем ток на обмотке (драйвер и обмотка в основном работают в качестве переключаемого источника с пошаговым понижением питания). Кроме того, если напряжение питания намного выше необходимого двигателю уровня для достижения требуемого тока, то скважность будет очень низкой, что также приводит к существенным различиям между средним и RMS током (среднеквадратичное значение переменного тока).
Драйвер шагового двигателя. Тестируем микросхему L9110 / Хабр
Откуда «ножки» растут
В настоящее время стали доступны и приобрели популярность различные станки с программным управлением. Это лазерные и фрезерные резчики и гравёры. А так же 3D принтеры. Все эти станки имеют один общий узел — шаговый двигатель.
А так же 3D принтеры. Все эти станки имеют один общий узел — шаговый двигатель.
И этому двигателю нужен драйвер.
Принцип работы двигателя не является предметом этой статьи. Мы рассмотрим только драйвер. Всё, что нам нужно знать в данном контексте — это какие управляющие сигналы нам нужно формировать для управления шаговым двигателем. Оказывается, это самые обычные прямоугольные импульсы.
Существует некоторое количество решений драйверов от различных компаний. В нашей статье мы рассмотрим самое доступное решение драйвера L9110 и его аналог HG7881 Это решение часто используется в Arduino
Теория и практика
Я решил применить микросхему L9110 в своём проекте.
Довольно легко нагуглил datasheet. Прочитал. Всё предельно понятно. Характеристики, распиновка, таблица истинности… По всем параметрам драйвер, вроде бы подходит. Напряжение коммутации — 12 вольт, выходной ток 800 ма. — всего хватает.
А что на деле?
Не откладывая в «долгий ящик» я сделал плату, написал и запустил тестовую программу…
Первое, на что я обратил внимание в своём устройстве — то, что микросхема драйвера сильно греется.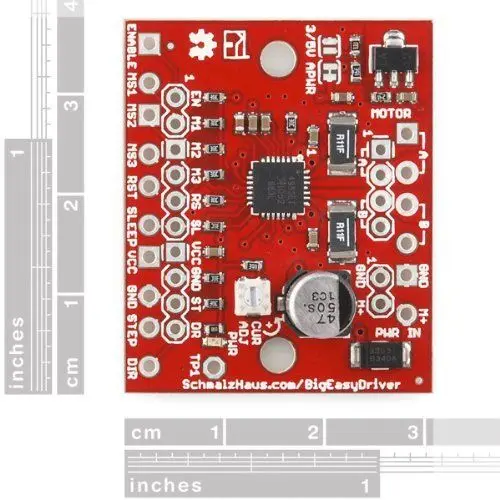 Внимание! НА ХОЛОСТОМ ХОДУ. Без нагрузки. Это что за чудеса схемотехники?
Внимание! НА ХОЛОСТОМ ХОДУ. Без нагрузки. Это что за чудеса схемотехники?
Может у меня микросхема бракованная?
Пришла в голову идея рассмотреть сей девайс поподробнее. И не один, а кучу.
Сказано — сделано.
Хорошо, что у меня была припасена панелька SO-8 и плата для моделирования.
Ну, и контроллер на базе STM32.
Собран стенд и произведены измерения.
Да, кстати, кроме непосредственно, силового узла в микросхеме заложена логика исключающее ИЛИ. В даташите это описано.
Поскольку я изучаю эффект нагрева микросхемы, лучше не ограничиваться логическими единицами и нулями, а снять реальные напряжения.
В результате измерений получилась табличка:
Рассмотрим строчки 2 и 3. Что мы здесь видим?
- Падение напряжения на выходных транзисторах, при наличии нагрузки, около полутора вольт, что при токе 0,33 ампера даёт 0,5 ватт на канал.
- На холостом ходу микросхема потребляет 0,05 А, что при напряжении 12 В даёт 0,6 ватт на канал.

Другими словами, независимо от нагрузки она потребляет около 0,5 Вт на канал. Теперь понятно, почему я об неё обжигал пальцы.
Сильный нагрев — это, конечно недостаток. Но может свою функцию микросхема выполняет хорошо? Тут пригодился недавно подаренный себе 4-х лучевой осциллограф приставка. Не ожидал, что мне так скоро потребуются все 4 луча. Для тестирования написал простенькую программку на stm32, который давно использую в различных проектах. Программа, просто, генерирует 2 прямоугольных сигналы с трёхкратной разницей частот.
Поскольку один раз увидеть лучше чем много раз прочитать — прикладываю развёртку сигналов управления.
Ничего особо сложного. Просто прямоугольные импульсы сдвинутые с разницей частоты в 3 раза.
Верхняя часть экрана — входные сигналы — нижняя — выходные.
Сразу бросается в глаза, что при различающихся значениях сигналов на входах, значения на выходах вполне чёткие Устанавливаются без задержек и с резкими фронтами.
Если же сигналы на входах совпадают — то фронт пологий. похож на разряд конденсатора.
Просмотрев документацию я не увидел ничего такого, что предвещало бы такое поведение.
Может я задал слишком высокую частоту входных сигналов? В даташите лимит не указан.
Уже зная, что у этого драйвера есть почти стопроцентный аналог HG7881 я обратился к его документации.
Она пролила больше света на эту загадочную ситуацию. Оказывается, логика работы драйвера немного шире. Две единицы на входе — это торможение ( то есть на выходе оба сигнала должно быть низкого уровня.) А два нуля на входе — это «висящие» контакты. Разрыв.
Значит два нуля на входе должны «подвешивать» выходы. Тогда, поведение разряжающегося конденсатора вполне предсказуемо. Однако две единицы на входах — должны быть надёжным нулём на выходе. А фактически это не так.
Я мог бы списать этот дефект на «китайского производителя». Однако, я тестировал микросхему по честному выпаянную из ардуиновской платы. При чём — не одну микросхему. Из нескольких плат. То есть, вероятность брака сильно снижена.
При чём — не одну микросхему. Из нескольких плат. То есть, вероятность брака сильно снижена.
Вывод
Область применения микросхем L9110 уже, чем задекларирована, да и КПД низковат.
Рассеяние 0,5-0,6 ватта на одном ключе — это многовато. Не случайно это решение самое дешёвое.(10 центов за микросхему. на алиэкспрессе).
В следующих статьях будут рассмотрены альтернативные драйвера шаговых двигателей.
Модули драйверов двигателей
Модуль 16-и канального ШИМ (PWM) контроллера на базе микросхемы PCA9685. Идеально подходит для управления 16 рулевыми машинками (сервоприводами). Интерфейс управления: I2C Напряжение питания модуля: 3-5 В • Питание модуля: 3.3 или 5 В оба напряжения входят в диапазон допустимых; • Питание чипа (VC..
171.99 р.
Технические характеристики
Напряжение питания силовой части (VMOT) : 5 – 35В
Напряжения питания логической части (VDD) : 3-5,5В
Ток максимальный, непрерывный, без дополнительного охлаждения: 1А
Ток максимальный, с дополнительным охлаждением: 2. 2A
Дробление шага: 1/2/4/8/16 Описание DRV8825 это мик..
2A
Дробление шага: 1/2/4/8/16 Описание DRV8825 это мик..
82.80 р.
Выходное напряжение 5 В Выходной ток 5А(max) Входное напряжение 7 – 30В, рекомендуемое до 24В ..
112.98 р.
Технические характеристики Напряжение питания силовой части (VMOT) : 8 – 45В Напряжения питания логической части (VDD) : 3-5,5В Ток максимальный, непрерывный, без дополнительного охлаждения: 1А Ток максимальный, с дополнительным охлаждением: 2.2A Дробление шага: 1/2/4/8/16/32 Описание DRV8825 это м..
141.27 р.
Технические характеристики
напряжение питания: +7…+ 24 В;
количество силовых каналов: 4;
максимально-продолжительный ток каждого канала: 0,6 А;
напряжение питания сервоприводов: 5 В;
возможность реверса каждого двигателя;
возможность независимого управления каждым каналом;
Габариты 53 . .
.
136.64 р.
Драйвер двигателей на базе микросхемы VNh3SP30. Ток до 30Ампер. Напряжение до 16В • Диапазон напряжения питания: 5,5V … 16V (от 5,0 вольт, не работает). • Номинальный\максимальный ток: 14A\30A • Управление логическим уровнем 3,3 вольт • Максимальная частота ШИМ: 20 кГц ..
343.20 р.
Двухканальный драйвер двигателей на базе микросхемы VNh3SP30. Ток до 30Ампер на канал. Напряжение до 16В Позволяет управлять двумя двигателями постоянного тока или одним шаговым двигателем. • Напряжение питания на входе питания моторов Vin: 5,5 … 16 В; • Напряжение логики: 5 В; • Основан на чипе ..
532.00 р.
Питание 12В, 30A. .
.
334.13 р.
Напряжение логики 3 – 5 В (VDD, GND) Напряжение для двигателей 5 – 46В (VMOT, GND) Рабочий выходной ток 1,2 А, до 2 А (с радиатором) Значение микрошага: 1/2, 1/4, 1/8, 1/16; Значение микрошага с интерполяцией: до 1/256; GND и VIO – питание логики; M1B, M1A, M2A, M2B – управление фазами двигателя; ..
407.87 р.
Данный модуль драйвера позволяет эффективно управлять одним шаговым двигателем, часто используется в 3D принтерах и станках ЧПУ. Больше всего привлекает бесшумной работой шагового двигателя, что довольно актуально на 3D принтерах работающих дома, большая надежность, повышенная мощностью до 2А по сра..
305.11 р.
Микросхема: L293D двойной-H мост DC моторов
. .
.
630.48 р.
Контроллер позволяет управлять одним шаговым двигателем или двумя коллекторными двигателями постоянного тока. Для подключения двигателей постоянного тока предусмотрены клеммники – напряжение питания управляемой части (постоянный ток): 5-35В – питание внешней логики (Vss): 5-7В – входное напряжение..
218.13 р.
Микросхема L298N • Управляющая часть пикового тока : 2 a • Диапазон питания: от 4,5 до 5,5 В • Логическая часть рабочего текущего диапазона: 0 ~ 36 мА • Диапазон входного напряжения управления: 4,5 – 5,5 • Максимальная потребляемая мощность: 20 Вт • Температура хранения: 25 град C ~ + 130 C • Разме..
221.27 р.
Микросхема L298N
Напряжение питания: 5В
Напряжение питания моторов: 5-35В
Максимальный ток мотора: 2А (пиковый ток 3 А)
Габариты: 43.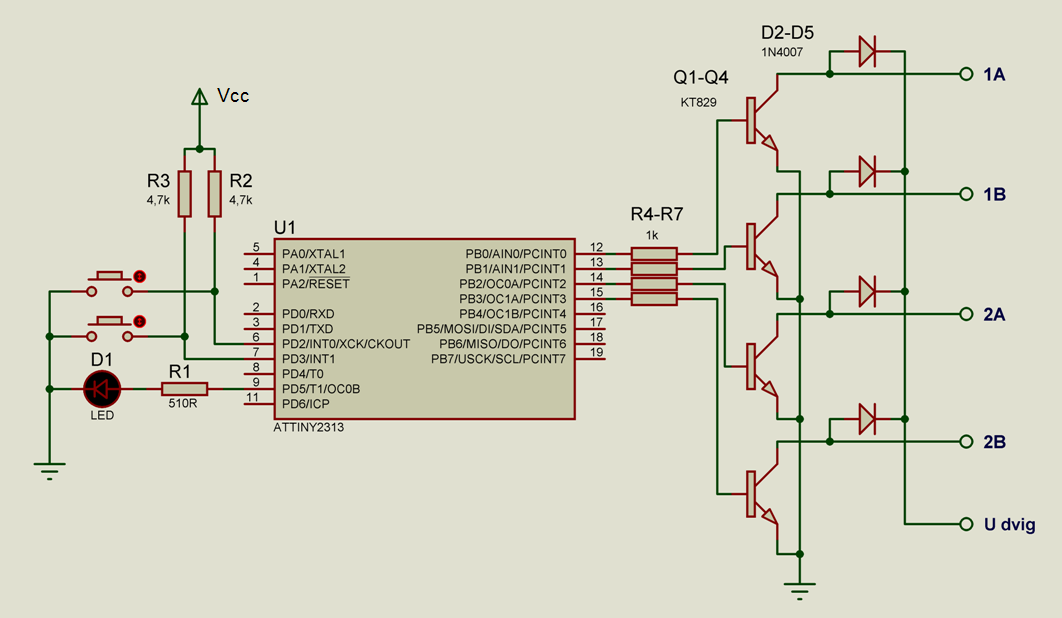 5 мм х 43.2мм х 29.4мм..
5 мм х 43.2мм х 29.4мм..
121.90 р.
Великолепный двухканальный драйвер моторов, который идеально подходит для сопряжения микроконтроллера с двумя маленькими электродвигателями постоянного тока или для управления одним биполярным шаговым мотором. Основанные на MOSFET H-мостах намного более эффективны, чем основанные на BJT H-мостах кот..
288.56 р.
Контроллер шагового двигателя. Микросхема контроллера: TB6560 – ток удержания 25%,50%,100% в процентах от тока номинального драйвера – ток рабочий 25%, 50%, 75%, 100% в процентах от тока номинального драйвера – выбрать шаг двигателя (микрошаг) 1, 1/2, 1/8, 1/16 Максимальный ток: 3А (3,5А в пике..
407.39 р.
Кол-во фаз: 2;
Напряжение питания: 9 – 40 В постоянного тока;
Максимальный выходной ток: 4 А;
Шесть вариантов микрошага. Максимальное деление шага до 6400 шагов/оборот;
Входные сигналы оптоизолтрованы высокоскоростными оптронами;
Выполнен в закрытом корпусе;
Встроенная тепловая защита;
Защита от пер..
Максимальное деление шага до 6400 шагов/оборот;
Входные сигналы оптоизолтрованы высокоскоростными оптронами;
Выполнен в закрытом корпусе;
Встроенная тепловая защита;
Защита от пер..
590.88 р.
Драйвер двигателя L9110S — с его помощью можно контролировать вращение 2-х независимых коллекторных моторов постоянного тока или одного 4-х проводного 2-х фазного шагового двигателя. Характеристики • Входное напряжение: 2.5-12 В; • Допустимый ток на канал: 800 мА; • Максимальный кратковременный ток:..
75.27 р.
Модуль предназначен для управления шаговым двигателем или другой нагрузкой
► Тип шагового двигателя: Униполярный
► Напряжение питания: 5 В, DC
► Количество фазы: 4
► Частота: 100 Гц
► Сопротивление постоянного тока: 50Ω ± 7% (25 ℃)
. .
.
36.83 р.
Модуль ключей ULN2003 для шагового двигателя Характеристики Рабочее напряжение: 5 – 45 В; Максимальный ток нагрузки: 500 мА; Напряжение управляющей логики: 5 В. ..
38.42 р.
Регулируемое напряжение 50 – 220 V (на выходе) Технические характеристики: Максимальная мощность: 2000 Вт Рабочее напряжение: AC 220 V Пластина радиатора размер: 48x35x30 мм ..
121.17 р.
Материал: Алюминий
Диапазон входного напряжения: DC 9V-60V
Номинальный ток: 10А
Максимальный ток: 20А
Размер: 105 x 50 x 33 мм Подходит для двигателя постоянного тока (или нагрузки постоянного тока) в пределах 20А. ..
..
321.31 р.
Рабочее напряжение: 5 В … 30 В, защита от обратного подключения Номинальный ток 2,2: максимальный ток 5А Максимальная мощность 2,3: 150 Вт Рабочая частота: 1 кГц ~ 99 кГц регулируемая, 1 кГц шаг, частота по умолчанию 20 кГц, точность около 1% Рабочий цикл: 0-100%, 1% шаг размер изделия: 79 мм * 4..
367.82 р.
Регулятор хода бесколлекторных двигателей. Оптимизирован для применения в мультикоптерах. Ток до 30А (пиковый ток 40А на 10 секунд) Входное напряжение 2-3s LiPo Вес 25гр..
373.46 р.
Габариты 69 × 53 × 9 mm
Напряжение питания: 3.3 или 5 В
Микросхема: PCA9685
Потребляемый ток: до 10 мА в рабочем режиме
до 15,5 мкА в режиме ожидания
Ток нагрузки на выходах: до 25 мА, при Vcc=5В и схемой с открытым стоком
до 10 мА, при Vcc=5В и схемой с каскадным выходом
Частота тактирования: 25 МГ. .
.
604.39 р.
Блок управления шаговым двигателем (драйвер шагового двигателя) А15
Драйвер LEADSHINE 3ND583
1. Введение Драйвер LEADSHINE 3ND583 3ND583 3-фазный микрошаговый драйвер, в основе которого лежит технология прецизионного контроля тока. Он подходит для работы с 3-фазными гибридными шаговыми двигателями
ПодробнееДРАЙВЕР G210A. Перемычки выбора микрошага
ДРАЙВЕР G210A Для работы с драйвером G210А Вам понадобится подходящий шаговый двигатель, источник питания, требуемый для двигателя и резистор для установки тока. Рабочий ток фазы шагового двигателя должен
Рабочий ток фазы шагового двигателя должен
Драйвер шагового двигателя ADR810/ADR812
Драйвер шагового двигателя ADR810/ADR812 ИНСТРУКЦИЯ по эксплуатации Апрель-2010 1 СОДЕРЖАНИЕ 1. НАЗНАЧЕНИЕ УСТРОЙСТВА…3 2. ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ…3 3. ЧЕРТЕЖ КОРПУСА…3 4. КРАТКИЙ ПЕРЕЧЕНЬ ТОГО,
ПодробнееШаговые двигатели FL20STH (1.8 )
1 Шаговые двигатели FL20STH (1.8 ) Угловой шаг 1.8 Погрешность углового шага ± 5% (полный шаг, без нагрузки) Погрешность сопротивления обмоток двигателя ± 10% Погрешность индуктивности ± 20% Рабочая температура
ПодробнееБЛОКИ ОПТОРЕЛЕ Б О Р
42 1898 БЛОКИ ОПТОРЕЛЕ Б О Р Руководство по эксплуатации СНЦИ.423142.002 РЭ Предприятие-изготовитель – АО “СКБ СПА” 428018, г. Чебоксары, ул. Афанасьева, д. 8 Отдел продаж: т/ф (8352) 45-89-50, 45-84-93
ПодробнееLPT МОДУЛЬ КОММУТАЦИИ ДРАЙВЕРОВ ШД
PLC4x LPT МОДУЛЬ КОММУТАЦИИ ДРАЙВЕРОВ ШД (breakout board) (совместимость с LPT ЧПУ программой типа Mach4, трансляция сигналов управления для 4-х осей станка ЧПУ, буферизания всех сигналов управления, 5
ПодробнееM542 V2.0. Руководство по эксплуатации
1 www.purelogic.ru Руководство по эксплуатации высокопроизводительный микрошаговый драйвер СОДЕРЖАНИЕ: 1. Общие сведения…2 2.Технические характеристики…3 3.Назначение и описание разъёмов…4 4. Разъём
ПодробнееООО «Онитекс» 2009г. 1
1 Оглавление. 1. Описание устройства 4 2. Условия эксплуатации 5 3. Подключение устройства 6 4. Гарантийные обязательства и техническая поддержка 7 5. Отметки ОТК 8 2 Драйвер шагового двигателя OMD-15A.
ПодробнееТЕПЛОКОМ БЛОК УПРАВЛЕНИЯ БУ
ТЕПЛОКОМ БЛОК УПРАВЛЕНИЯ БУ 2 Руководство пользователя РБЯК.648233.030 Д1 www.teplocom.nt-rt.ru с. 2 Руководство пользователя 1 Общие положения Блок управления БУ 2 используется для силового управления
ПодробнееРуководство по эксплуатации
ОКП 43 7191 ТНВЭД: 8537 10 Руководство по эксплуатации Блок релейный «БР-1» Сертификат соответствия ТР 123-ФЗ: С-RU.АБ03.В.00082 до 17.04.2021г. Сертификат соответствия ТР ТС: ТС RU С-RU.АУ05.В.02267 до
ПодробнееPLD330 Драйвер шагового двигателя
www.purelogic.ru Руководство по эксплуатации Драйвер шагового двигателя СОДЕРЖАНИЕ: 1. Общие сведения… 2 2. Комплект поставки… 2 3. Технические характеристики… 3 4. Возможности драйвера… 4 5. Подключение
ПодробнееPEL3DT DOC072011
ПУСКАТЕЛЬ ЭЛЕКТРОННЫЙ ПЕЛ-3-050(100)(150)-ДТ ТЕХНИЧЕСКОЕ ОПИСАНИЕ И ИНСТРУКЦИЯ ПО ЭКСПЛУАТАЦИИ PEL3DT.04.09.DOC072011 ТО Киев 2011 2 3 СОДЕРЖАНИЕ ВВЕДЕНИЕ… 4 1. НАЗНАЧЕНИЕ И ОБЛАСТЬ ПРИМЕНЕНИЯ.. 4 2.
ПодробнееГенератор шаговых импульсов PG-03
Оглавление. 1. Описание устройства 3 2. Условия эксплуатации 4 3. Подключение устройства 5 4. Гарантийные обязательства 6 5. Контакты поставщика 7 1 Генератор шаговых импульсов PG-03. Руководство по эксплуатации.
ПодробнееТехнические характеристики устройства
ООО «ПКФ «ОЛДИ» предлагает устройство защиты двигателя УЗД собственного производства, которое предназначено для защиты асинхронного электродвигателя путем отключения при возникновении следующей аварийной
ПодробнееРуководство пользователя
Руководство пользователя Высокопроизводительный Микрошаговый Драйвер M880A Внимание: Пожалуйста, внимательно прочтите это руководство перед использованием драйвера! 1. Введение, особенности и применение
ПодробнееПовторитель ARP485 ЛМТК ТУ
Повторитель ARP485 ЛМТК.426429.010ТУ Руководство по эксплуатации ООО «ЛМТ» http://lmt.ifmo.ru 1 из 6 Версия документа 1.0.0 Дата изменения 07.06.2016 Содержание 1. Требования безопасности… 3 2. Общие
ПодробнееОпределение частотных границ шагового двигателя с драйвером А4988
Библиографическое описание:Аверченко, А. П. Определение частотных границ шагового двигателя с драйвером А4988 / А. П. Аверченко, А. А. Молдагулова, Р. С. Нурмаганов. — Текст : непосредственный // Молодой ученый. — 2019. — № 47 (285). — С. 108-110. — URL: https://moluch.ru/archive/285/64326/ (дата обращения: 15.07.2021).
В современном мире все большую популярность приобретают устройства, в составе которых используется шаговый двигатель (ШД), это обусловлено достаточно простым управлением скоростью вращения, а также возможностью точного углового позиционирования положения вала. ШД используется в принтерах, сканерах, факсах, световом оборудовании, а также в разнообразном промышленном и специальном оборудовании, например в станках ЧПУ. Очень широкое применение ШД нашли в робототехнике, автомобилестроении.
Задача состоит в экспериментальном определении оптимальных частот переключения микрошаговых режимов двигателей. Необходимо, определить граничные частоты, при которых происходит плавный, стабильный запуск и вращение ШД, а также частоты срыва, на которой двигатель перестает, вращается стабильно. Определение частот необходимо произвести при постоянном напряжении питания драйвера 4,5В, на сам ШД подаем 16,4В. При этом граничные частоты являются рекомендованными для создания устройств на базе данных ШД и драйвера.
В исследовательской работе использовали гибридный ШД, который сочетает в себе больший удерживающий и динамический крутящий момент, чем ШД с переменным или постоянным магнитом. Ротор имеет зубцы, расположенные в осевом направлении и он разделен на две части, внутри ротора расположен цилиндрический постоянный магнит. Зубцы верхней половины являются северным магнитным полюсом, а другая половина южным. Особенность ШД в том, что он может контролировать угловое положение ротора без замкнутого контура обратной связи. [1]
Чтобы упростить процесс управления ШД существуют соответствующие драйверы. Драйвер — представляет собой электрическую цепь или другой электронный компонент, предназначенный для преобразования электрических сигналов. Драйвер используется для управления биполярным шаговым двигателем с полным шагом, половинным и микрошагом, а также для регулирования тока, протекающего через цепь и направлением вращения двигателя. В данной работе использовался драйвер, созданный на базе микросхемы А4988.
Рабочее место: генератор сигналов произвольной формы HMF 2550, источник питания ATH-1333–2 шт, шаговый двигатель MT-1703HD200AW, драйвер А4988.
ШД имеет размер шага 1,8° (что соответствует 200 шагам на оборот). Драйвер А4988 позволяет работать с микрошагом. Выбор микрошага устанавливается при помощи входов драйвера MS1, MS2, MS3, при подаче соответствующих логических уровней можно организовать пять различных шаговых режимов представленных в таблице 1.
Таблица 1
Микрошаговые режимы А4988
Разрешение микрошагов | MS1 | MS2 | MS3 | Угол поворота на шаге |
Полный шаг | «0» | «0» | «0» | 1.8° |
Половина шага | «1» | «0» | «0» | 0.9° |
Четверть шага | «0» | «1» | «0» | 0.45° |
Одна восьмая шага | «1» | «1» | «0» | 0.225° |
Одна шестнадцатая шага | «1» | «1» | «1» | 0.1125° |
Рис. 1. Схема установки
Управление шаговым двигателем осуществляется через входы «ENABLE», «STEP» и «DIR». Каждый импульс, поступающий на вход «STEP» соответствует одному микрошагу ШД в направлении, выбранном с помощью «DIR».
Для разрешения работы драйвера, нужно установить уровень логического «0» на вход «ENABLE». Провода первой обмотки шагового двигателя подключаются к выводам драйвера 1А, 1В, второй обмотки к выводам 2А, 2В.
В таблице — 2, при напряжении питания драйвера 4,5В, разгоняем ШД плавно от стабильного запуска и до частоты срыва, для различных микрошагов. Определили предельное значение частоты, при которой ШД стабильно запускается.
Таблица 2
Частоты запуска исрыва ШД
Назначение микрошага | Оптимальная частота плавного перехода при 4.5 В | Предельное значение запуска ШД | |
запуск | предел | ||
Полный шаг | 850 Гц / 255 об/мин | 9000 Гц / 2700 об/мин | 1000 Гц |
Половина шага | 1500 Гц / 450 об/мин | 2560 Гц / 768 об/мин | 2500 Гц |
Четверть шага | 3050 Гц / 915 об/мин | 31500 Гц / 9450 об/мин | 4500 Гц |
Одна восьмая шага | 6200 Гц / 1 860 об/мин | 91100 Гц / 27330 об/мин | 7900 Гц |
Одна шестнадцатая шага | 12500 Гц / 3750 об/мин | 192300 Гц / 57690 об/мин | 15300 Гц |
Чтобы момент на валу был больше, нужно использовать как можно меньший шаг, то есть микрошаги не оказывают никакого негативного влияния на крутящий момент.
Для управления ШД была написана программа на языке программирования С++. С помощью драйвера А4988 формировали импульсы. Для установки шага использовали три сигнала MS1, MS2, MS3. [2]
Подберем шаги и значения для ШИМ для разных частот вращения. ШИМ по отношению к процессору внешняя система, которая формирует сигнал. Зная, на каких оборотах, работает ШД, можно рассчитать число для ШИМ модулятора.
Найдем по формуле число для ШИМ модулятора N
Где fтакт — частота кварцевого генератора 50 МГц;
x — обороты в минуту;
fconst=200 Гц,
tсек=60 секунд;
y — микрошаги;
Подставим значения:
Один выход у контроллера, который может менять его шаги. Управляя одним сигналом можно менять только одно число.
Разрешение микрошага | MS1 | MS2 | MS3 |
Полный шаг | «0» | «0» | «0» |
Четверть шага | «0» | «1» | «0» |
Возьмем в пример полный шаг и четверть шага. Меняется только вход MS2.
˃ 2700 об/мин — полный шаг
˂ 2700 об/мин — четверть шага
Изменяя MS2 с «0» на «1» плавно переходим с полного шага на четверть шага. В итоге, была выполнена задача плавного управления, разгоном и торможением ШД с использованием одного сигнала переключения шагов. Исходя из этого была выбрана частота перехода из полного шага в четверть шага — 2700 об/мин, что позволило добиться плавности работы ШД от 0 до 800 об/мин.
Литература:
1. Кенио Т. Шаговые двигатели и их микропроцессорные системы управления: Пер. с англ. — М.: Энергоатомиздат, 1987. — 200 с.
2. Вычужанин В. Управление шаговым электродвигателем с помощью ПЛИС: 3-е изд. Компоненты и технологии, 2004. — 96–98 с.
Основные термины (генерируются автоматически): полный шаг, четверть шага, мина, шаговый двигатель, шаг, HMF, напряжение питания драйвера, половина шага, стабильный запуск, частота срыва.
Pololu – Драйверы шагового двигателя
Драйверы шаговых двигателей специально разработаны для привода шаговых двигателей, которые способны непрерывно вращаться с точным контролем положения даже без системы обратной связи. Наши драйверы шаговых двигателей предлагают регулируемое управление током и несколько шагов разрешения, и они имеют встроенные преобразователи, которые позволяют управлять шаговым двигателем с помощью простых шагов и направлений. Эти модули, как правило, являются базовыми несущими платами для различных ИС драйверов шаговых двигателей, которые предлагают низкоуровневые интерфейсы, такие как входы, для непосредственного запуска каждого шага.Для генерации этих сигналов низкого уровня обычно требуется внешний микроконтроллер.
Большинство наших драйверов шаговых двигателей доступны в компактных (0,6 ″ × 0,8 ″) форм-факторах, совместимых с выводами. В следующей таблице сравнивается наш выбор из них:
| A4988 & lpar; оригинал & rpar; | A4988, Black Ed. | ДРВ8825 | ДРВ8834 | ДРВ8880 | MP6500, Горшок.CC | MP6500, Цифровой CC | TB67S279FTG | TB67S249FTG | STSPIN820 | STSPIN220 | |
|---|---|---|---|---|---|---|---|---|---|---|---|
| Чип драйвера: | A4988 | DRV8825 | DRV8834 | DRV8880 | MP6500 | TB67S279FTG | TB67S249FTG | STSPIN820 | STSPIN220 | ||
| Мин. Рабочее напряжение: | 8 В | 8.2 В | 2,5 В | 6,5 В | 4,5 В | 10 В | 10 В | 7 В | 1,8 В | ||
| Максимальное рабочее напряжение: | 35 В | 45 В | 10,8 В | 45 В | 35 В | 47 В | 47 В | 45 В | 10 В | ||
| Макс.продолжительный ток на фазу: (1) | 1 А | 1.2 А | 1,5 А | 1,5 А | 1 А | 1,5 А | 1,1 А | 1,6 А | 0,9 А | 1,1 А | |
| Пиковый ток на фазу: (2) | 2 А | 2,2 А | 2 А | 1,6 А | 2,5 А | 2 А | 2 А | 4,5 А | 1,5 А | 1,3 А | |
| Микрошаг до: | 1/16 | 1/32 | 1/32 | 1/16 | 1/8 | 1/32 | 1/32 | 1/256 | 1/256 | ||
| Количество слоев картона: | 2 | 4 | 4 | 4 | 4 | 4 | 4 | 4 | 4 | 4 | |
| Особенности: | высокое макс. напряжение, высокое напряжение | низковольтный рабочий, сильный ток | AutoTune, цифровой ток снижение, макс. напряжение | сильноточный | цифровой ток контроль, сильный ток | Автоматическая регулировка усиления, ADMD, макс. напряжение | Автоматическая регулировка усиления, ADMD, высокое максимальное напряжение, высокий ток | 128 и 256 микрошагов, макс. напряжение | 64, 128 и 256 микрошагов, низковольтный рабочий | ||
| Цена за 1 штуку: | 5 долларов США.95 | $ 7,49 | $ 8.95 | $ 11.95 | $ 6.95 | $ 5.95 | $ 5.95 | $ 7,75 | $ 9.95 | $ 7,75 | $ 5.95 |
| 1 На несущей плате Pololu, при комнатной температуре и без дополнительного охлаждения. 2 Максимальный теоретический ток в зависимости от компонентов на плате (требуется дополнительное охлаждение). | |||||||||||
В эту категорию также входят несколько более крупных модулей драйверов, которые, как правило, могут обеспечивать более современные и предлагать больше функций, чем более компактные драйверы, указанные выше:
| TB67S279FTG Полный прорыв | TB67S249FTG Полный разрыв | AMIS-30543 | TB67S128FTG | Мощный шаговый двигатель Драйвер двигателя 36v4 | |||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Чип драйвера: | TB67S279FTG | TB67S249FTG | AMIS-30543 | TB67S128FTG | DRV8711 | ||||||
| Мин. Рабочее напряжение: | 10 В | 10 В | 6 В | 6.5 В | 8 В | ||||||
| Максимальное рабочее напряжение: | 47 В | 47 В | 30 В | 44 В | 50 В | ||||||
| Макс.продолжительный ток на фазу: (1) | 1,2 А | 1,7 А | 1,8 А | 2,1 А | 4 А | ||||||
| Пиковый ток на фазу: (2) | 2 А | 4.5 А | 3 А | 5 А | 6 А | ||||||
| Микрошаг до: | 1/32 | 1/32 | 1/128 | 1/128 | 1/256 | ||||||
| Количество слоев картона: | 2 | 2 | 2 | 2 | 2 | ||||||
| Размеры: | 1,0 ″ × 1,4 ″ | 1,0 ″ × 1,4 ″ | 1,0 ″ × 1,2 ″ | 1.2 ″ × 1,6 ″ | 1,3 ″ × 1,2 ″ | ||||||
| Особенности: | Автоматическая регулировка усиления, ADMD, высокое максимальное напряжение | Автоматическая регулировка усиления, ADMD, высокое максимальное напряжение, высокий ток | Интерфейс SPI, ШИМ с низким уровнем электромагнитных помех, высокий ток, 1/128 микрошаг, обратная связь по ЭДС | Автоматическая регулировка усиления, ADMD, высокое максимальное напряжение, высокий ток, 1/128 микрошаг, дополнительный последовательный интерфейс | сверхвысокий ток, высокое максимальное напряжение, интерфейс SPI, 1/256 микрошаг, обратная связь по ЭДС, обнаружение останова | ||||||
| Цена за 1 штуку: | $ 9.75 | $ 11.95 | $ 14.95 | $ 13.95 | $ 16.95 | ||||||
| 1 На несущей плате Pololu, при комнатной температуре и без дополнительного охлаждения. 2 Максимальный теоретический ток в зависимости от компонентов на плате (требуется дополнительное охлаждение). | |||||||||||
Для более высокого уровня управления шаговым двигателем, рассмотрите наши контроллеры шагового двигателя Tic, которые содержат некоторые из тех же микросхем драйверов шагового двигателя, что и наши несущие платы, в сочетании со встроенным микроконтроллером, который интеллектуально генерирует в ответ низкоуровневый управляющий сигнал. к различным интерфейсам, таким как USB для прямого подключения к компьютеру, последовательный TTL и I²C для использования с микроконтроллером, RC-импульсные сервоимпульсы для использования в RC-системе, аналоговые напряжения для использования с потенциометром или аналоговым джойстиком и квадратурные энкодер для использования с поворотным энкодером.Tics также предлагает широкий спектр настроек, которые можно настроить через USB с помощью бесплатной программы.
Сравнить все товары в этой категории
Подкатегории
Эти коммутационные платы для драйверов биполярных шаговых двигателей STMicro STSPIN220 имеют девять различных микрошаговых разрешений с шагом 1/256, регулируемое ограничение тока и работу до 1,8 В.
Эти коммутационные платы для драйверов биполярных шаговых двигателей STMicro STSPIN820 имеют восемь различных микрошаговых разрешений с шагом 1/256, регулируемое ограничение тока и широкий рабочий диапазон от 7 В до 45 В.
Эти коммутационные платы для драйверов биполярных шаговых двигателей Toshiba TB67S2x9FTG имеют регулируемое ограничение тока, технологию адаптивного управления усилением, семь микрошаговых разрешений (вплоть до 1/32 ступени) и многое другое. Они работают от 10 В до 47 В и могут выдавать фазу приблизительно 1,2 А или 1,7 А без радиатора (в зависимости от версии).
Эти коммутационные платы для драйвера биполярного шагового двигателя MPS MP6500 имеют регулируемое ограничение тока, защиту от перегрузки по току и перегреву, а также четыре микрошаговых разрешения (вплоть до 1/8 шага).Они работают от 4,5 В до 35 В и могут выдавать примерно 1,5 А на фазу без радиатора (драйвер рассчитан на 2,5 А на катушку).
Эти коммутационные платы для драйвера биполярного шагового двигателя DRV8825 от TI имеют регулируемое ограничение тока, защиту от перегрузки по току и перегреву, а также шесть микрошаговых разрешений (вплоть до 1/32 шага). Они работают от 8,2 В до 45 В и могут выдавать приблизительно 1,5 А на фазу без радиатора (они рассчитаны на ток до 2,2 А на катушку).
Эти водители Black Edition являются более производительной заменой оригинального держателя драйвера шагового двигателя A4988. Они имеют четырехслойную печатную плату для улучшения тепловых характеристик, что позволяет микрошаговому биполярному шаговому двигателю A4988 выдавать примерно на 20% больше тока, чем наша двухслойная версия.
Эти коммутационные платы для драйвера биполярного шагового двигателя Allegro A4988 имеют регулируемое ограничение тока, защиту от перегрузки по току и перегреву, а также пять микрошаговых разрешений (вплоть до 1/16 шага).Они работают от 8 В до 35 В и могут выдавать примерно 1 А на фазу без радиатора (они рассчитаны на ток до 2 А на катушку).
Товары в категории «Драйверы шаговых двигателей»
Этот драйвер шагового двигателя на дискретных полевых МОП-транзисторах позволяет управлять одним биполярным шаговым двигателем. Он поддерживает широкий диапазон рабочего напряжения от 8 В до 50 В и может обеспечивать до 4 А непрерывно на фазу без радиатора или принудительного воздушного потока (максимум 6 А при достаточном дополнительном охлаждении).Интерфейс SPI позволяет настроить ограничение тока, пошаговый режим (9 ступенчатых режимов от полного шага до 1/256 шага), режим спада и обнаружение останова. Драйвер также обеспечивает обратную связь по ЭДС, которую можно использовать для более сложных алгоритмов управления и обнаружения останова. Дополнительные функции включают защиту от обратного напряжения, пониженного напряжения и перегрузки по току.
Эта коммутационная плата упрощает использование микрошагового биполярного шагового двигателя TB67S128FTG от Toshiba, который имеет регулируемое ограничение тока и микрошаговый шаг до 1/128.Кроме того, он имеет возможность динамически выбирать оптимальный режим затухания, отслеживая фактический ток двигателя, и он может автоматически уменьшать управляющий ток ниже полной величины, когда двигатель слегка нагружен, чтобы минимизировать потребление энергии и тепловыделение. Драйвер имеет широкий диапазон рабочего напряжения от 6,5 В до 44 В и может непрерывно выдавать приблизительно 2,1 A на фазу без радиатора или принудительного воздушного потока (до 5 А пиковое значение). Он имеет встроенную защиту от пониженного напряжения, перегрузки по току и перегрева; наша несущая плата также добавляет защиту от обратного напряжения (до 40 В).
Это коммутационная плата для микрошагового драйвера биполярного шагового двигателя AMIS-30543 компании ON Semiconductor, который имеет регулируемое по SPI ограничение тока, 11 ступенчатых режимов (от полного шага до 1/128-шагового), обратную связь по ЭДС, которую можно использовать для обнаружения опрокидывания или дополнительного управления с обратной связью, а также защиты от перегрузки по току и перегрева. Плата работает от 6 В до 30 В и может выдавать до 1,8 А на фазу без теплоотвода или принудительного воздушного потока (она рассчитана на 3 А на катушку при достаточном дополнительном охлаждении).
Это коммутационная плата для микрошагового драйвера биполярного шагового двигателя DRV8834 компании TI. Он имеет распиновку и интерфейс, которые почти идентичны таковым у наших носителей A4988, поэтому его можно использовать в качестве замены этих плат во многих приложениях. DRV8834 работает от 2,5–10,8 В, что позволяет питать шаговые двигатели от напряжения, слишком низкого для других драйверов, и может непрерывно обеспечивать до примерно 1,5 А на фазу без радиатора или принудительного воздушного потока (до 2 А пиковое значение. ).Он имеет регулируемое ограничение тока, защиту от перегрузки по току и перегреву, а также шесть микрошаговых разрешений (вплоть до 1/32 ступени). Эта плата поставляется с включенными, но не припаянными штыревыми контактами 0,1 ″.
Эта версия нашего низковольтного держателя драйвера шагового двигателя DRV8834 поставляется с с установленными штыревыми контактами , поэтому пайка не требуется, чтобы использовать его с подходящей 16-контактной розеткой или макетной платой без пайки. Дополнительную информацию о драйвере см. На странице продукта-держателя низковольтного шагового двигателя DRV8834.
Эта коммутационная плата для микрошагового драйвера биполярного шагового двигателя DRV8880 от TI имеет регулируемое ограничение тока, защиту от перегрузки по току и перегреву, а также шесть микрошаговых разрешений (вплоть до 1/16 шага). Кроме того, ограничение тока драйвера может быть динамически уменьшено для экономии энергии, и он имеет функцию автонастройки, которая автоматически выбирает режим затухания, который приводит к наиболее плавной форме волны тока. Плата имеет распиновку и интерфейс, которые почти идентичны таковым у наших носителей A4988, поэтому ее можно использовать в качестве замены этих плат во многих приложениях.DRV8880 работает от 6,5 В до 45 В и может непрерывно выдавать до 1 А на фазу без радиатора или принудительного воздушного потока (пиковое значение до 1,6 А). Эта плата поставляется с включенными, но не припаянными штыревыми контактами 0,1 ″.
Pololu High-Power Stepper Motor Driver 36v4
Обзор
Драйвер шагового двигателя высокой мощности Pololu 36v4, вид снизу с размерами. |
|---|
Драйвер шагового двигателя высокой мощности Pololu 36v4, вид сверху. |
|---|
Драйвер мощного шагового двигателя Pololu 36v4 сочетает в себе микросхему драйвера шагового двигателя DRV8711 от Texas Instruments с внешними полевыми МОП-транзисторами для управления большими биполярными шаговыми двигателями при рабочем напряжении от 8 В до 50 В. DRV8711 имеет множество настраиваемых параметров. настройки, поэтому, пожалуйста, обратитесь к таблице данных DRV8711 для подробного объяснения его функций и того, как их использовать (у нас также есть библиотека Arduino, которая упрощает начало работы, предоставляя базовые функции для настройки и работы с драйвером).
Мощность драйвера зависит от внешних двойных H-мостов, которые позволяют драйверу обеспечивать непрерывный ток до 4 А на фазу без какого-либо дополнительного охлаждения, такого как радиаторы или принудительный поток воздуха. (При достаточном дополнительном охлаждении драйвер может поддерживать ток примерно до 6 А на фазу; дополнительную информацию, включая важную информацию о безопасном использовании этого продукта, см. В разделе , посвященном рассеиваемой мощности ).
Основные характеристики
- Широкий диапазон рабочего напряжения от 8 В до 50 В
- Высокая мощность: может обеспечивать до 4 А непрерывно на фазу без дополнительного охлаждения (максимум 6 А при достаточном дополнительном охлаждении)
- Широкие возможности настройки через интерфейс SPI
- Дополнительные контакты управления STEP / DIR (пошаговое управление также можно контролировать только через интерфейс SPI)
- Девять различных шагов разрешения вплоть до 256 микрошагов: полный шаг, полушаг, 1/4 шага, 1/8 шага, 1/16 шага, 1/32 шага, 1/64 шага, 1 / 128-шаговый и 1/256-шаговый
- Регулируемое управление током позволяет вам установить максимальный выходной ток, позволяя использовать напряжения, превышающие номинальное напряжение вашего шагового двигателя, для достижения более высокой скорости шага
- Адаптивное время гашения, регулируемое время затухания и различные режимы затухания тока позволяют создавать сверхплавные профили движения через интерфейс SPI
- Дополнительный выход STALL позволяет обнаруживать остановку при микрошаге
- Дополнительный выход BEMF обеспечивает более совершенные алгоритмы управления и обнаружения останова на основе обратной ЭДС шагового двигателя Драйвер
- поддерживает альтернативный режим работы для управления двумя щеточными двигателями постоянного тока с входами PWM вместо одного биполярного шагового двигателя с входами STEP / DIR
- Входы, совместимые с 1.Логика 8 В, 3,3 В и 5 В
- Все цифровые выходы имеют открытый сток с подтягиванием к внешнему питающему напряжению IOREF для использования с системами, отличными от 5В (IOREF может быть подключен к соседнему выводу 5V OUT для использования с системами 5V)
- Блокировка пониженного напряжения, защита от перегрузки по току, защита от короткого замыкания и защита от обратного напряжения (до 40 В) Доступна библиотека
- Arduino и примеры эскизов, которые предоставляют основные функции для настройки и работы с драйвером
В качестве альтернативы этому драйверу шагового двигателя наш многоинтерфейсный USB-контроллер высокомощного шагового двигателя Tic 36v4 имеет аналогичные характеристики мощности и предлагает интерфейсы высокого уровня (USB, последовательный TTL, I²C, аналоговое напряжение, квадратурный энкодер и RC сервоимпульсы для хобби), которые упрощают использование в некоторых приложениях.Программное обеспечение для настройки Tic позволяет изменять многие настройки драйвера через USB, устраняя необходимость напрямую использовать SPI для настройки DRV8711.
Обновление от 19 сентября 2019 г .: В настоящее время мы поставляем небольшую версию (md38b) с улучшенным шумом и отказоустойчивостью при высоких входных напряжениях и высоких ограничениях по току.
Оборудование в комплекте
В комплект поставки данного продукта входят все компоненты для поверхностного монтажа, как показано на рисунке продукта. Однако для сборки входящих в комплект деталей со сквозным отверстием требуется пайка.В комплект входят следующие детали для сквозных отверстий:
Штыревые разъемы 0,1 ″ могут быть сломаны или разрезаны на более мелкие части по желанию и впаяны в меньшие сквозные отверстия. Эти разъемы совместимы с беспаечными макетными платами, 0,1-дюймовыми гнездовыми разъемами, а также с нашими премиальными и предварительно обжатыми перемычками. Клеммные колодки можно впаять в отверстия большего размера, чтобы обеспечить удобное временное подключение неподключенных проводов питания и двигателя (см. Наше короткое видео по установке клеммной колодки).Вы также можете припаять провода двигателя и другие соединения непосредственно к плате для наиболее компактной установки.
Использование драйвера
Распиновка
| PIN | Описание |
|---|---|
| VIN | Подключение питания платы от 8 В до 50 В (с обратной защитой до 40 В). |
| ВМ | Этот вывод дает доступ к источнику питания двигателя после полевого МОП-транзистора с защитой от обратного напряжения (см. Схему платы внизу этой страницы). Его можно использовать для подачи питания с обратной защитой на другие компоненты системы. Этот вывод также можно использовать с соседним выводом GND для добавления внешнего электролитического конденсатора в системах, где может быть полезна дополнительная байпасная емкость. |
| ЗЕМЛЯ | Точки подключения заземления для источника питания двигателя и контрольного заземления.Источник управления и драйвер двигателя должны иметь общую землю. |
| AOUT1 | Выход двигателя: «положительный» конец катушки фазы А. |
| AOUT2 | Выход двигателя: «отрицательный» конец катушки фазы А. |
| BOUT1 | Выход двигателя: «положительный» конец катушки фазы B. |
| BOUT2 | Выход двигателя: «отрицательный» конец катушки фазы B. |
| V5 (ВЫХОД) | Регулируемый выход 5 В: этот вывод дает доступ к напряжению от внутреннего регулятора DRV8711.Регулятор может обеспечивать только до 10 мА, поэтому он в первую очередь полезен только для высоких входов платы с жесткой проводкой и подтягивания питания для выходов с открытым стоком на плате. Обычно он не предназначен для питания внешних устройств. |
| IOREF | Все сигнальные выходы платы (кроме BEMF) являются выходами с открытым стоком, подтянутыми до IOREF, поэтому на этот вывод должно подаваться логическое напряжение системы управления (например, 3,3 В для использования в системах 3,3 В). Для удобства его можно подключить к соседнему выводу V5 (OUT), когда он используется в системе 5 В. |
| ШАГ / AIN1 | Изменения на этом входе перемещают ток двигателя на одну ступень вверх или вниз в таблице транслятора (даже когда двигатель отключен). Пошаговым режимом также можно управлять через интерфейс SPI, поэтому этот вывод не является обязательным. В режиме внешнего ШИМ этот вывод работает как AIN1, а не как STEP, и напрямую контролирует состояние выхода AOUT1. |
| DIR / AIN2 | Вход, определяющий направление вращения шагового двигателя.Направление также можно контролировать через интерфейс SPI, поэтому этот вывод не является обязательным. В режиме внешнего ШИМ этот вывод работает как AIN2, а не как DIR, и напрямую контролирует состояние выхода AOUT2. |
| SDATO | Вывод данных SPI. (Этот вывод также часто называют «MISO».) Этот вывод является выходом с открытым стоком и подтянут к IOREF на плате. |
| SDATI | Ввод данных SPI. (Этот вывод также часто называют «MOSI».) |
| SCLK | Тактовый вход SPI. |
| SCS | Вход выбора микросхемы SPI. Логические переходы на этом выводе необходимы для связи SPI, даже если это единственное устройство на шине SPI. |
| СОН | По умолчанию драйвер устанавливает на этот вывод низкий уровень, что переводит его в спящий режим с низким энергопотреблением, когда схема драйвера двигателя отключена, а все аналоговые схемы переводятся в состояние низкого энергопотребления. Цифровая схема по-прежнему работает в спящем режиме, поэтому к регистрам устройства все еще можно получить доступ через последовательный интерфейс.Этот штифт должен быть установлен высоко, чтобы включить устройство. |
| СБРОС | Вход сброса микросхемы. Высокий логический уровень на этом входе сбрасывает всю внутреннюю логику, включая регистры индексатора и устройства, и отключает выходы драйвера. Примечание: контакт RESET не работает, пока устройство находится в спящем режиме. |
| НЕИСПРАВНОСТЬ | Выход с открытым стоком, который переходит в низкий уровень при возникновении неисправности из-за перегрузки по току, предварительного драйвера, перегрева или пониженного напряжения. Этот штифт подтянут к IOREF, что по умолчанию делает его высоким. |
| БИН1 | В режиме внешней ШИМ BIN1 напрямую управляет состоянием выхода BOUT1. Этот вывод не используется в режиме индексатора (т. Е. При использовании этого устройства в качестве драйвера шагового двигателя). |
| БИН2 | В режиме внешней ШИМ BIN2 напрямую управляет состоянием выхода BOUT2. Этот вывод не используется в режиме индексатора (т. Е. При использовании этого устройства в качестве драйвера шагового двигателя). |
| СТОЛБ / БЭМФВ | Выход с открытым стоком, подтянутый к IOREF на плате.В режиме обнаружения внутреннего опрокидывания выходной сигнал становится низким при обнаружении опрокидывания. В режиме обнаружения внешнего опрокидывания выходной сигнал становится низким, когда доступно действительное измерение обратной ЭДС. |
| БЭМФ | Аналоговый выход, представляющий противо-ЭДС двигателя. Сигнал на этом выводе может быть дополнительно обработан микроконтроллером для реализации более совершенных алгоритмов управления и обнаружения останова. |
Дополнительные сведения об этих контактах см. В таблице данных DRV8711.
При высоких входных напряжениях (особенно выше 30 В) и высоких ограничениях по току на интерфейс SPI драйвера с большей вероятностью будут влиять электрические помехи от драйвера и шагового двигателя, что может привести к ошибкам связи. Вы можете уменьшить эти помехи с помощью тщательной проводки и экранирования, и вы можете снизить риск неожиданного поведения, приняв соответствующие меры предосторожности при обмене данными по SPI (например, считайте и проверьте параметры конфигурации после их записи и избегайте настройки драйвера, пока выходы двигателя не работают). включено).
В качестве альтернативы рассмотрите возможность использования нашего многоинтерфейсного USB-контроллера мощного шагового двигателя Tic 36v4, который обеспечивает высокоуровневые интерфейсы для настройки и управления (делая ненужным прямую связь SPI).
Общая типовая электрическая схема
Типовая схема подключения микроконтроллера к драйверу мощного шагового двигателя Pololu 36v4. |
|---|
Хотя драйвер высокомощного шагового двигателя 36v4 позволяет управлять шаговым двигателем через простой интерфейс шага и направления, его необходимо сначала включить и настроить через интерфейс SPI после каждого включения питания.Это означает, что управляющий микроконтроллер должен быть способен действовать как мастер SPI (либо с периферийным SPI, либо с программным SPI), и он должен быть подключен к контактам SDATI, SCLK и SCS. Хотя выводы SDATO и FAULT не требуются для использования этого драйвера, обычно рекомендуется использовать их для отслеживания ошибок.
Типовая электрическая схема (только для систем 5 В)
Типовая схема подключения микроконтроллера с логическим напряжением 5 В к драйверу мощного шагового двигателя Pololu 36v4. |
|---|
Драйвер мощного шагового двигателя 36v4 имеет внутренний регулятор 5 В, который можно использовать для питания IOREF в тех случаях, когда плата используется в системах с напряжением 5 В. Мы предоставляем перемычку для подключения V5 к IOREF, или для более компактного соединения вы можете перемыть перемычку для поверхностного монтажа, расположенную рядом с этими контактами (выделено на рисунке ниже).
Перемычка для установки на поверхность контактов V5 и IOREF на драйвере мощного шагового двигателя Pololu 36v4. |
|---|
Библиотека Arduino и пример кода
Управление драйвером мощного шагового двигателя Pololu 36v4 с помощью Arduino-совместимого # 3104 A-Star 32U4 Mini SV. |
|---|
Мы написали библиотеку драйвера мощного шагового двигателя для Arduino, которая предоставляет базовые функции для настройки и управления драйвером с использованием контроллера, совместимого с Arduino или Arduino. В библиотеке есть несколько примеров скетчей.
Рекомендации по рассеиванию мощности
Драйвер мощного шагового двигателя 36v4 может обеспечивать до 4 А непрерывно на фазу в типичных условиях, но фактический ток, который он может выдавать, будет зависеть от того, насколько хорошо вы можете поддерживать модуль в холодном состоянии. Печатная плата драйвера предназначена для отвода тепла от полевых МОП-транзисторов, но производительность можно улучшить, добавив радиатор или принудительный поток воздуха. (И наоборот, производительность будет снижена в приложениях, которые ограничивают рассеивание тепла, например при высоких температурах окружающей среды или работе в закрытых помещениях.) При достаточном дополнительном охлаждении драйвер может выдавать до 6 А на фазу до превышения номинальной мощности 1 Вт резисторов считывания тока 30 мОм.
Ограничение тока драйвера устанавливается через его интерфейс SPI. Вы можете убедиться, что установили его правильно, измерив с помощью мультиметра фактический ток через одну из катушек, когда шаговый двигатель находится в полношаговом режиме, а не в пошаговом режиме. Ток, который вы измеряете таким образом, будет примерно 70% установленного предела. Обратите внимание, что измерение тока, потребляемого источником питания, обычно не дает точного измерения тока катушки.Поскольку входное напряжение для драйвера может быть значительно выше, чем напряжение катушки, измеренный ток на источнике питания может быть немного ниже, чем ток катушки (драйвер и катушка в основном действуют как импульсный понижающий источник питания). Кроме того, если напряжение питания очень высокое по сравнению с тем, что требуется двигателю для достижения заданного тока, рабочий цикл будет очень низким, что также приведет к значительным различиям между средним и среднеквадратичным токами.
Предупреждение: Этот драйвер двигателя не имеет значимого отключения при перегреве (в то время как микросхема DRV8711 имеет защиту от перегрева, в первую очередь перегреваются внешние полевые МОП-транзисторы). Перегрев может привести к необратимому повреждению привода двигателя. Мы настоятельно рекомендуем вам не увеличивать настройку ограничения тока выше 4 А (или ниже в приложениях с пониженным тепловыделением), если вы не подтвердите сначала, что температура полевых МОП-транзисторов будет ниже 140 ° C.
Примечание: При включении драйвера настройка ограничения тока по умолчанию устанавливается на максимум (~ 18 А). Убедитесь, что вы установили что-то подходящее как для вашего шагового двигателя, так и для драйвера, прежде чем активировать выходы!
Этот продукт может нагреться до , чтобы обжечься задолго до того, как чип перегреется.Будьте осторожны при обращении с этим продуктом и другими подключенными к нему компонентами.
Принципиальная схема
Принципиальная схема драйвера мощного шагового двигателя Pololu 36v4. |
|---|
Эта диаграмма также доступна в виде загружаемого файла в формате pdf (117k pdf).
A4988 Держатель драйвера шагового двигателя
A4983 / A4988 Держатель драйвера шагового двигателя с размерами. |
|---|
Обзор
Этот продукт является несущей платой или коммутационной платой для микрошагового драйвера Allegro A4988 DMOS с транслятором и защитой от перегрузки по току; Поэтому мы рекомендуем внимательно прочитать техническое описание A4988 (1 МБ pdf) перед использованием этого продукта. Этот драйвер шагового двигателя позволяет вам управлять одним биполярным шаговым двигателем с выходным током до 2 А на катушку (дополнительную информацию см. В разделе , посвященном рассеиванию мощности, приведенному ниже). Вот некоторые из основных функций драйвера:
- Простой интерфейс управления шагом и направлением
- Пять различных разрешений шага: полный шаг, полушаг, четверть шага, восьмой шаг и шестнадцатый шаг
- Регулируемый контроль тока позволяет вам установить максимальный выходной ток с помощью потенциометра, что позволяет вам использовать напряжения, превышающие номинальное напряжение вашего шагового двигателя, для достижения более высокой скорости шага
- Интеллектуальное управление измельчением, которое автоматически выбирает правильный текущий режим затухания (быстрое затухание или медленное затухание)
- Термическое отключение при перегреве, блокировка при пониженном напряжении и защита от перекрестного тока
- Защита от короткого замыкания на массу и короткого замыкания нагрузки
Этот продукт поставляется со всеми компонентами для поверхностного монтажа, включая микросхему драйвера A4988, которые установлены, как показано на рисунке продукта.
Этот продукт поставляется в индивидуальной упаковке с включенными, но не припаянными, штыревыми контактами 0,1 ″; у нас также есть версия с уже впаянными штырями заголовка. Для клиентов, заинтересованных в больших объемах при более низких затратах на единицу продукции, мы предлагаем версию в оптовой упаковке без штырей заголовка и версию в оптовой упаковке с установленными штырями заголовка.
Обратите внимание, что у нас есть несколько драйверов шаговых двигателей, которые можно использовать в качестве альтернативы для этого модуля (и для замены во многих приложениях):
- Доступен держатель драйвера шагового двигателя Black Edition A4988 с примерно на 20% большей производительностью; За исключением тепловых характеристик, Black Edition и эта (зеленая) плата взаимозаменяемы.
- Носитель MP6500 может выдавать до 1,5 А на фазу (непрерывно) без радиатора и доступен в двух версиях: одна с потенциометром для управления ограничением тока, а другая – с цифровым регулятором ограничения тока для динамической регулировки ограничения тока с помощью микроконтроллера. .
- Носитель DRV8825 предлагает примерно на 50% лучшую производительность в более широком диапазоне напряжений и имеет несколько дополнительных функций.
- Носитель DRV8834 работает с напряжением питания двигателя всего 2.5 В, что делает его пригодным для низковольтных приложений.
- Носитель DRV8880 предлагает динамически масштабируемое ограничение тока и «Автонастройку», которая автоматически выбирает режим затухания в каждом цикле ШИМ для оптимального регулирования тока на основе таких факторов, как сопротивление и индуктивность обмотки двигателя, а также динамическая скорость и нагрузка двигателя.
Мы также продаем увеличенную версию несущей A4988, которая имеет защиту от обратной мощности на основном входе и встроенные 5 В и 3.Стабилизаторы напряжения 3 В, которые устраняют необходимость в отдельных источниках питания логики и двигателя.
Некоторые униполярные шаговые двигатели (например, с шестью или восемью выводами) могут управляться этим драйвером как биполярные шаговые двигатели. Для получения дополнительной информации ознакомьтесь с часто задаваемыми вопросами. С этим драйвером нельзя использовать униполярные двигатели с пятью выводами.
Оборудование в комплекте
Держатель драйвера шагового двигателя A4988 поставляется с одним разъединяемым штекером 1 × 16 контактов 0,1 “. Эти разъемы можно припаять для использования с беспаечными макетными платами или 0.Гнездовые разъемы 1 дюйм. Вы также можете припаять провода двигателя и другие соединения непосредственно к плате. (Также доступна версия этой платы с уже установленными разъемами).
Использование драйвера
Минимальная электрическая схема для подключения микроконтроллера к держателю шагового двигателя A4988 (полношаговый режим). |
|---|
Силовые соединения
Драйвер требует, чтобы напряжение питания логики (3–5,5 В) было подключено к контактам VDD и GND, а напряжение питания двигателя (8–35 В) было подключено к контактам VMOT и GND. Эти источники питания должны иметь соответствующие развязывающие конденсаторы рядом с платой, и они должны обеспечивать ожидаемые токи (пиковые значения до 4 А для питания двигателя).
Предупреждение: В этой несущей плате используются керамические конденсаторы с низким ESR, что делает ее восприимчивой к деструктивным скачкам напряжения LC, особенно при использовании кабелей питания длиной более нескольких дюймов.При правильных условиях эти скачки напряжения могут превышать максимальное номинальное напряжение 35 В для A4988 и необратимо повредить плату, даже если напряжение питания двигателя составляет всего 12 В. Один из способов защитить драйвер от таких скачков – установить большой (не менее 47 мкФ) электролитический конденсатор между мощностью двигателя (VMOT) и заземлением где-то рядом с платой.
Соединения двигателя
Четырех-, шести- и восьмипроводные шаговые двигатели могут приводиться в действие A4988, если они правильно подключены; Ответ на часто задаваемые вопросы подробно объясняет правильную проводку.
Предупреждение: Подключение или отключение шагового двигателя при включенном приводе может привести к его повреждению. (В более общем плане, переустановка чего-либо, пока оно находится под напряжением, вызывает проблемы.)
Размер шага (и микрошага)
Шаговые двигателиобычно имеют размер шага (например, 1,8 ° или 200 шагов на оборот), который применяется к полному шагу. Микрошаговый драйвер, такой как A4988, обеспечивает более высокое разрешение за счет промежуточных положений ступеней, которые достигаются за счет подачи питания на катушки с промежуточными уровнями тока.Например, управление двигателем в четвертьшаговом режиме даст двигателю с 200 шагами на оборот 800 микрошагов на оборот за счет использования четырех различных уровней тока.
Входы селектора разрешения (размера шага) (MS1, MS2 и MS3) позволяют выбирать из пяти разрешений шага в соответствии с таблицей ниже. MS1 и MS3 имеют внутренние понижающие резисторы 100 кОм, а MS2 имеет внутренний понижающий резистор 50 кОм, поэтому оставление этих трех выводов выбора микрошага отключенными приводит к переходу в полношаговый режим.Для правильной работы микрошаговых режимов необходимо установить достаточно низкий предел тока (см. Ниже), чтобы сработало ограничение тока. В противном случае промежуточные уровни тока не будут поддерживаться должным образом, и двигатель будет пропускать микрошаги.
| MS1 | MS2 | MS3 | Микрошаг Разрешение |
|---|---|---|---|
| Низкая | Низкая | Низкий | Полный шаг |
| Высокая | Низкая | Низкий | Полушаг |
| Низкая | Высокая | Низкая | Четверть шага |
| Высокая | Высокая | Низкая | Восьмая ступень |
| Высокая | Высокая | Высокая | Шестнадцатая ступень |
Управляющие входы
Каждый импульс на входе STEP соответствует одному микрошагу шагового двигателя в направлении, выбранном выводом DIR.Обратите внимание, что контакты STEP и DIR не подтягиваются к какому-либо определенному напряжению внутри, поэтому вы не должны оставлять ни один из этих контактов плавающим в вашем приложении. Если вам просто нужно вращение в одном направлении, вы можете связать DIR напрямую с VCC или GND. Микросхема имеет три разных входа для управления многочисленными состояниями питания: RST, SLP и EN. Подробные сведения об этих состояниях питания см. В таблице данных. Обратите внимание, что штифт RST плавающий; если вы не используете контакт, вы можете подключить его к соседнему контакту SLP на печатной плате, чтобы поднять его и включить плату.
Ограничение тока
Одним из способов повышения производительности шагового двигателя является использование максимально возможного напряжения для вашего приложения. В частности, увеличение напряжения, как правило, обеспечивает более высокую частоту шагов и крутящий момент, поскольку ток в катушках может изменяться быстрее после каждого шага. Однако для безопасного использования напряжений, превышающих номинальное напряжение шагового двигателя, необходимо активно ограничивать ток катушки, чтобы не допустить превышения номинального тока двигателя.
A4988 поддерживает такое ограничение активного тока, а подстроечный потенциометр на плате может использоваться для установки ограничения тока. Один из способов установить ограничение тока – это перевести драйвер в полношаговый режим и измерить ток, протекающий через одну катушку двигателя, одновременно регулируя потенциометр ограничения тока. Это должно быть сделано с двигателем, удерживающим фиксированное положение (т. Е. Без синхронизации входа STEP). Обратите внимание на , что измеряемый вами ток составляет только 70% от фактической настройки ограничения тока , так как обе катушки всегда включены и ограничены этим значением в полношаговом режиме, поэтому, если вы позже включите микрошаговые режимы, ток через катушки смогут превышать этот измеренный ток полного шага на 40% (1/0.7) на определенных ступенях; Пожалуйста, примите это во внимание при использовании этого метода для установки текущего лимита. Также обратите внимание, что вам нужно будет выполнить эту настройку еще раз, если вы когда-нибудь измените логическое напряжение Vdd, поскольку опорное напряжение, которое устанавливает ограничение тока, является функцией Vdd.
Примечание: Ток катушки может сильно отличаться от тока источника питания, поэтому не следует использовать ток, измеренный на источнике питания, для установки ограничения тока. Подходящее место для установки измерителя тока – это последовательно с одной из катушек шагового двигателя.
Другой способ установить ограничение тока – это вычислить опорное напряжение, которое соответствует желаемому пределу тока, а затем отрегулировать потенциометр ограничения тока до тех пор, пока вы не измерите это напряжение на выводе VREF . Напряжение на контакте VREF доступно через переходное отверстие, обведенное кружком на нижней шелкографии печатной платы. Ограничение тока I MAX относится к опорному напряжению следующим образом:
“ I_ (МАКС) = (V_ (REF)) / (8 * R_ (CS)) `
или, преобразованный для решения для VREF:
“ V_ (REF) = 8 * I_ (MAX) * R_ (CS) `
R CS – текущее сопротивление измерения; оригинальные версии этой платы использовали 0.050 Ом резисторов считывания тока, но мы перешли на использование резисторов считывания тока 0,068 Ом в январе 2017 года, что делает более полезными диапазон регулировочного потенциометра. На следующем рисунке показано, как определить, какие резисторы измерения тока установлены на вашей плате:
Идентификация исходных сенсорных резисторов 50 мОм (слева) и сенсорных резисторов 68 мОм (справа), представленных в январе 2017 года. |
|---|
Итак, например, если вы хотите установить предел тока на 1 А и у вас есть плата с резисторами считывания 68 мОм, вы должны установить VREF на 540 мВ.2) = I_ (MAX) = 1 текст (A) “
Если вместо этого вы хотите, чтобы ток через каждой катушки составлял 1 А в полношаговом режиме, вам необходимо установить ограничение тока на 40% выше или 1,4 А, поскольку катушки ограничены примерно 70% установленный предел тока в полношаговом режиме (уравнение выше показывает, почему это так). Чтобы сделать это с платой с резисторами считывания 68 мОм, вы должны установить VREF на 770 мВ.
Рекомендации по рассеиванию мощности
ИС драйвера A4988 имеет максимальный номинальный ток 2 А на катушку, но фактический ток, который вы можете передать, зависит от того, насколько хорошо вы можете поддерживать ИС в холодном состоянии.Печатная плата носителя предназначена для отвода тепла от ИС, но для подачи более примерно 1 А на катушку требуется теплоотвод или другой метод охлаждения.
Этот продукт может нагреться до , достаточно, чтобы обжечься задолго до того, как чип перегреется. Будьте осторожны при обращении с этим продуктом и другими подключенными к нему компонентами.
Обратите внимание, что измерение тока, потребляемого источником питания, обычно не дает точного измерения тока катушки.Поскольку входное напряжение для драйвера может быть значительно выше, чем напряжение катушки, измеренный ток на источнике питания может быть немного ниже, чем ток катушки (драйвер и катушка в основном действуют как импульсный понижающий источник питания). Кроме того, если напряжение питания очень высокое по сравнению с тем, что требуется двигателю для достижения заданного тока, рабочий цикл будет очень низким, что также приведет к значительным различиям между средним и среднеквадратичным токами.
Принципиальная схема
Принципиальная схема держателя драйвера шагового двигателя A4988 (как для зеленого, так и для черного цветов). |
|---|
Примечание: Эта плата является заменой нашего оригинального (и теперь снятого с производства) держателя драйвера шагового двигателя A4983. Более новый A4988 предлагает защиту от перегрузки по току и имеет внутреннее напряжение 100 кОм на выводе выбора микрошага MS1, но в остальном он практически идентичен A4983.
DRV8825 Держатель драйвера шагового двигателя, сильный ток
Держатель драйвера шагового двигателя DRV8824 / DRV8825 с размерами. |
|---|
Обзор
Этот продукт является несущей платой или коммутационной платой для драйвера шагового двигателя DRV8825 компании TI; Поэтому мы рекомендуем внимательно прочитать техническое описание DRV8825 перед использованием этого продукта. Этот драйвер шагового двигателя позволяет вам управлять одним биполярным шаговым двигателем с выходным током до 2,2 А на катушку (дополнительную информацию см. В разделе , посвященном рассеянию мощности, приведенному ниже). Вот некоторые из основных функций драйвера:
- Простой интерфейс управления шагом и направлением
- Шесть различных шагов разрешения: полный шаг, полушаг, 1/4 шага, 1/8 шага, 1/16 шага и 1/32 шага
- Регулируемый контроль тока позволяет вам установить максимальный выходной ток с помощью потенциометра, что позволяет вам использовать напряжения, превышающие номинальное напряжение вашего шагового двигателя, для достижения более высокой скорости шага
- Интеллектуальное управление измельчением, которое автоматически выбирает правильный текущий режим затухания (быстрое затухание или медленное затухание)
- Максимальное напряжение питания 45 В
- Встроенный регулятор (внешний источник логического напряжения не требуется)
- Может напрямую взаимодействовать с 3.Системы 3 В и 5 В
- Тепловое отключение при перегреве, отключение при перегрузке по току и блокировка при пониженном напряжении
- Защита от короткого замыкания на массу и короткого замыкания нагрузки
- 4-слойная медная печатная плата на 2 унции для улучшенного отвода тепла
- Открытая паяемая заземляющая площадка под микросхемой драйвера в нижней части печатной платы
- Модуль по размеру, распиновке и интерфейсу во многом соответствует нашим держателям драйверов шагового двигателя A4988 (дополнительную информацию см. Внизу этой страницы).
Обратите внимание, что у нас есть несколько других драйверов шаговых двигателей, которые можно использовать в качестве альтернативы этому модулю (и заменять их во многих приложениях):
- Держатель DRV8834 работает с напряжением питания двигателя всего 2.5 В, что делает его пригодным для низковольтных приложений.
- Носитель DRV8880 предлагает динамически масштабируемое ограничение тока и «Автонастройку», которая автоматически выбирает режим затухания в каждом цикле ШИМ для оптимального регулирования тока на основе таких факторов, как сопротивление и индуктивность обмотки двигателя, а также динамическая скорость и нагрузка двигателя.
- Носитель MP6500 может выдавать до 1,5 А на фазу (непрерывно) без радиатора и доступен в двух версиях: одна с потенциометром для управления ограничением тока, а другая – с цифровым регулятором ограничения тока для динамической регулировки ограничения тока с помощью микроконтроллера. .
- Держатель драйвера шагового двигателя Black Edition A4988 – это более производительная версия нашего оригинального держателя A4988.
Этот продукт поставляется со всеми компонентами для поверхностного монтажа, включая микросхему драйвера DRV8825, установленными, как показано на рисунке продукта.
Этот продукт поставляется в индивидуальной упаковке с включенными, но не припаянными, штыревыми контактами 0,1 ″; у нас также есть версия с уже впаянными штырями заголовка. Для клиентов, заинтересованных в больших объемах при более низких затратах на единицу продукции, мы предлагаем версию в оптовой упаковке без штырей заголовка и версию в оптовой упаковке с установленными штырями заголовка.
Некоторые униполярные шаговые двигатели (например, с шестью или восемью выводами) могут управляться этим драйвером как биполярные шаговые двигатели. Для получения дополнительной информации ознакомьтесь с часто задаваемыми вопросами. С этим драйвером нельзя использовать униполярные двигатели с пятью выводами.
Оборудование в комплекте
Держатель драйвера шагового двигателя DRV8825 поставляется с одним разъединяемым штекером 1 × 16 контактов 0,1 дюйма. Эти разъемы можно припаять для использования с беспаечными макетными платами или разъемами с гнездом 0,1 дюйма.Вы также можете припаять провода двигателя и другие соединения непосредственно к плате. (Также доступна версия этой платы с уже установленными заголовками.)
Внимание: Установка штифтов заголовка так, чтобы сторона шелкографии была вверху, а компоненты опущены, может ограничить диапазон движения подстроечной ручки, используемой для установки ограничения тока.Если вы планируете установить контакты заголовка в этой ориентации, пожалуйста, установите ограничение по току перед пайкой контактов.
Использование драйвера
Минимальная электрическая схема для подключения микроконтроллера к держателю драйвера шагового двигателя DRV8824 / DRV8825 (полношаговый режим). |
|---|
Силовые соединения
Драйвер требует, чтобы напряжение питания двигателя 8,2 – 45 В было подключено через VMOT и GND.Этот источник питания должен иметь соответствующие разделительные конденсаторы рядом с платой, и он должен обеспечивать ожидаемый ток шагового двигателя.
Предупреждение: В этой несущей плате используются керамические конденсаторы с низким ESR, что делает ее восприимчивой к деструктивным скачкам напряжения LC, особенно при использовании кабелей питания длиной более нескольких дюймов. При правильных условиях эти выбросы могут превысить максимальное номинальное напряжение 45 В для DRV8825 и необратимо повредить плату, даже если напряжение питания двигателя составляет всего 12 В.Один из способов защитить драйвер от таких скачков – подключить большой (не менее 47 мкФ) электролитический конденсатор к силе двигателя (VMOT) и заземлить где-нибудь рядом с платой.
Соединения двигателя
Четырех-, шести- и восьмипроводные шаговые двигатели могут приводиться в движение DRV8825, если они правильно подключены; Ответ на часто задаваемые вопросы подробно объясняет правильную проводку.
Предупреждение: Подключение или отключение шагового двигателя при включенном приводе может привести к его повреждению.(В более общем плане, переустановка чего-либо, пока оно находится под напряжением, вызывает проблемы.)
Размер шага (и микрошага)
Шаговые двигателиобычно имеют размер шага (например, 1,8 ° или 200 шагов на оборот), который применяется к полному шагу. Микрошаговый драйвер, такой как DRV8825, обеспечивает более высокое разрешение, позволяя определять промежуточные положения ступеней, что достигается за счет подачи питания на катушки с промежуточными уровнями тока. Например, управление двигателем в четвертьшаговом режиме даст двигателю с 200 шагами на оборот 800 микрошагов на оборот за счет использования четырех различных уровней тока.
Входы селектора разрешения (размера шага) (MODE0, MODE1 и MODE2) позволяют выбрать одно из шести разрешений шага в соответствии с таблицей ниже. Все три входа селектора имеют внутренние понижающие резисторы 100 кОм, поэтому оставление этих трех выводов выбора микрошага отключенными приводит к переходу в полношаговый режим. Для правильной работы микрошаговых режимов необходимо установить достаточно низкий предел тока (см. Ниже), чтобы сработало ограничение тока. В противном случае промежуточные уровни тока не будут поддерживаться должным образом, и двигатель будет пропускать микрошаги.
| РЕЖИМ 0 | РЕЖИМ1 | РЕЖИМ2 | Микрошаг Разрешение |
|---|---|---|---|
| Низкая | Низкая | Низкая | Полный шаг |
| Высокая | Низкая | Низкая | Полушаг |
| Низкая | Высокая | Низкая | 1/4 шага |
| Высокая | Высокая | Низкая | 1/8 шага |
| Низкая | Низкая | Высокая | 1/16 шага |
| Высокая | Низкая | Высокая | 1/32 шага |
| Низкая | Высокая | Высокая | 1/32 шага |
| Высокая | Высокая | Высокая | 1/32 шага |
Управляющие входы
Каждый импульс на входе STEP соответствует одному микрошагу шагового двигателя в направлении, выбранном выводом DIR.Оба этих входа по умолчанию подтягиваются к низкому уровню через внутренние понижающие резисторы 100 кОм. Если вам нужно вращение только в одном направлении, вы можете оставить DIR отключенным.
Микросхема имеет три разных входа для управления состоянием питания: RESET, SLEEP и ENBL. Подробные сведения об этих состояниях питания см. В таблице данных. Обратите внимание, что драйвер подтягивает вывод SLEEP к низкому уровню через внутренний понижающий резистор 1 МОм, и он подтягивает выводы RESET и ENBL к низкому уровню через внутренние понижающие резисторы 100 кОм.Эти состояния по умолчанию RESET и SLEEP не позволяют драйверу работать; оба этих контакта должны иметь высокий уровень для включения драйвера (они могут быть подключены напрямую к логическому «высокому» напряжению от 2,2 до 5,25 В, или ими можно динамически управлять через подключения к цифровым выходам MCU). Состояние вывода ENBL по умолчанию – активировать драйвер, поэтому этот вывод можно оставить отключенным.
Схема контактов nSLEEP и nFAULT на держателях DRV8824 / DRV8825 / DRV8834. |
|---|
DRV8825 также имеет выход FAULT, который устанавливает низкий уровень всякий раз, когда полевые транзисторы H-моста отключены в результате защиты от перегрузки по току или теплового отключения. Плата-носитель соединяет этот вывод с выводом SLEEP через резистор 10 кОм, который действует как подтягивание НЕИСПРАВНОСТИ всякий раз, когда SLEEP внешне удерживается на высоком уровне, поэтому внешнее подтягивание на выводе НЕИСПРАВНОСТЬ не требуется. Обратите внимание, что несущая панель включает в себя защитный резистор 1,5 кОм, последовательно соединенный с выводом FAULT, что позволяет безопасно подключать этот вывод напрямую к источнику логического напряжения, что может произойти, если вы используете эту плату в системе, разработанной для совместимого по выводам A4988. перевозчик.В такой системе резистор 10 кОм между SLEEP и FAULT будет затем действовать как подтягивающий для SLEEP, что делает несущую DRV8825 более прямой заменой A4988 в таких системах (A4988 имеет внутреннюю подтяжку в SLEEP штырь). Чтобы не допустить сбоев в работе вывода SLEEP, любой внешний подтягивающий резистор, который вы добавляете к входу вывода SLEEP, не должен превышать 4,7 кОм.
Ограничение тока
Для достижения высокой скорости шага мощность двигателя обычно намного выше, чем было бы допустимо без ограничения активного тока.Например, типичный шаговый двигатель может иметь максимальный номинальный ток 1 А с сопротивлением катушки 5 Ом, что означает максимальное напряжение питания двигателя 5 В. Использование такого двигателя с напряжением 12 В позволит увеличить скорость шага, но ток должен активно ограничиваться до менее 1 А, чтобы предотвратить повреждение двигателя.
DRV8825 поддерживает такое ограничение активного тока, а подстроечный потенциометр на плате может использоваться для установки ограничения тока. Обычно вы хотите установить ограничение тока драйвера на уровне или ниже номинального тока вашего шагового двигателя.Один из способов установить ограничение тока – это перевести драйвер в полношаговый режим и измерить ток, протекающий через одну катушку двигателя, без синхронизации входа STEP. Измеренный ток будет в 0,7 раза больше предельного тока (поскольку обе катушки всегда включены и ограничены примерно 70% от установленного предела тока в полношаговом режиме).
Другой способ установить ограничение тока – измерить напряжение на выводе «ref» и вычислить результирующее ограничение тока (резисторы измерения тока 0.100 Ом ). Напряжение на выводе ref доступно через переходное отверстие, обведенное кружком на нижней шелкографии печатной платы. Ограничение тока относится к опорному напряжению следующим образом:
Ограничение по току = VREF × 2
Так, например, если у вас есть шаговый двигатель с номиналом 1 А, вы можете установить ограничение тока на 1 А, установив опорное напряжение на 0,5 В.
Примечание: Ток катушки может сильно отличаться от тока источника питания, поэтому не следует использовать ток, измеренный на источнике питания, для установки ограничения тока.Подходящее место для установки измерителя тока – это последовательно с одной из катушек шагового двигателя.
Рекомендации по рассеиванию мощности
ИС драйвера DRV8825 имеет максимальный номинальный ток 2,5 А на катушку, но резисторы измерения тока дополнительно ограничивают максимальный ток до 2,2 А, а фактический ток, который вы можете подать, зависит от того, насколько хорошо вы можете поддерживать ИС в холодном состоянии. Печатная плата носителя предназначена для отвода тепла от ИС, но для подачи более чем примерно 1.5 А на змеевик, требуется радиатор или другой метод охлаждения.
Этот продукт может нагреться до , достаточно, чтобы обжечься задолго до того, как чип перегреется. Будьте осторожны при обращении с этим продуктом и другими подключенными к нему компонентами.
Обратите внимание, что измерение тока, потребляемого источником питания, обычно не дает точного измерения тока катушки. Поскольку входное напряжение для драйвера может быть значительно выше, чем напряжение катушки, измеренный ток на источнике питания может быть немного ниже, чем ток катушки (драйвер и катушка в основном действуют как импульсный понижающий источник питания).Кроме того, если напряжение питания очень высокое по сравнению с тем, что требуется двигателю для достижения заданного тока, рабочий цикл будет очень низким, что также приведет к значительным различиям между средним и среднеквадратичным токами. Кроме того, обратите внимание, что ток катушки является функцией установленного ограничения тока, но не обязательно, чтобы равнялось настройке ограничения тока. Фактический ток через каждую катушку изменяется с каждым микрошагом. См. Техническое описание DRV8825 для получения дополнительной информации.
Принципиальная схема
Принципиальная схема держателя драйвера шагового двигателя DRV8824 / DRV8825. |
|---|
Токовые резисторы (R2 и R3) на несущей DRV8825 имеют сопротивление 0,100 Ом. Эта схема также доступна для скачивания в формате pdf (196 КБ pdf).
Ключевые различия между DRV8825 и A4988
Держатель DRV8825 был разработан, чтобы быть максимально похожим на наши держатели драйверов шагового двигателя A4988, и его можно использовать в качестве запасной замены для носителя A4988 во многих приложениях, поскольку он имеет тот же размер, распиновку и общий интерфейс управления. .Однако следует отметить несколько различий между двумя модулями:
Держатель привода шагового двигателя DRV8825. |
|---|
Держатель драйвера шагового двигателя A4988, Black Edition (показан с оригинальными зелеными резисторами считывания тока 50 мОм). |
|---|
- Вывод, используемый для подачи логического напряжения на A4988, используется как выход FAULT DRV8825, поскольку DRV8825 не требует питания логики (а A4988 не имеет выхода неисправности).Обратите внимание, что безопасно подключать вывод FAULT непосредственно к источнику питания логики (между выводом IC и выводом есть резистор 1,5 кОм для его защиты), поэтому модуль DRV8825 можно использовать в системах, разработанных для A4988, которые маршрутизируют логику мощность к этому контакту.
- Вывод SLEEP на DRV8825 не подтягивается по умолчанию, как на A4988, но несущая плата подключает его к выводу FAULT через резистор 10 кОм. Следовательно, системы, предназначенные для A4988, которые направляют логическое питание на вывод FAULT, будут эффективно иметь подтягивание 10k на выводе SLEEP.(Этот резистор 10 кОм отсутствует в начальной (md20a) версии носителя DRV8825.)
- Потенциометр ограничения тока находится в другом месте.
- Отношение между настройкой ограничения тока и напряжением опорного вывода другое.
- DRV8825 предлагает 1/32 шага микрошага; A4988 опускается только до 1/16 шага.
- Входы выводов выбора режима, соответствующие шагу 1/16 на A4988, приводят к микрошагу 1/32 на DRV8825.Для всех других разрешений микрошага таблица выбора шага одинакова как для DRV8825, так и для A4988.
- Требования к времени для минимальной длительности импульса на выводе STEP различны для двух драйверов. В DRV8825 каждый шаговый импульс высокого и низкого уровня должен быть не менее 1,9 мкс; при использовании A4988 они могут составлять всего 1 мкс.
- DRV8825 имеет более высокое максимальное напряжение питания, чем A4988 (45 В против 35 В), что означает, что DRV8825 может более безопасно использоваться при более высоких напряжениях и менее подвержен повреждению из-за скачков напряжения LC.
- DRV8825 может выдавать больший ток, чем A4988, без какого-либо дополнительного охлаждения (на основе наших полношаговых тестов: 1,5 А на катушку для DRV8825 против 1,2 А на катушку для A4988 Black Edition и 1 А на катушку для оригинального держателя A4988. ).
- DRV8825 использует другое соглашение об именах для выходов шагового двигателя, но они функционально такие же, как соответствующие контакты на держателе A4988, поэтому одинаковые подключения к обоим драйверам приводят к одинаковому поведению шагового двигателя.На обеих платах первая часть этикетки идентифицирует катушку (так что у вас есть катушки «A» и «B» на DRV8825 и катушки «1» и «2» на A4988).
- Для тех, кто работает с приложениями, чувствительными к цвету, обратите внимание, что носитель DRV8825 фиолетовый.
Таким образом, носитель DRV8825 достаточно похож на наши носители A4988, поэтому минимальная схема подключения для A4988 является допустимым альтернативным способом подключения DRV8825 к микроконтроллеру:
Альтернативная минимальная электрическая схема для подключения микроконтроллера к держателю драйвера шагового двигателя DRV8824 / DRV8825 (полношаговый режим). |
|---|
Люди часто покупают этот товар вместе с:
DRV8834 Держатель привода низковольтного шагового двигателя
Держатель низковольтного привода шагового двигателя DRV8834 с размерами. |
|---|
Обзор
Этот продукт является несущей платой или коммутационной платой для низковольтного драйвера шагового двигателя DRV8834 компании TI; Поэтому мы рекомендуем внимательно прочитать техническое описание DRV8834 перед использованием этого продукта.Этот драйвер шагового двигателя позволяет вам управлять одним биполярным шаговым двигателем с выходным током до 2 А на катушку (дополнительную информацию см. В разделе , посвященном рассеиванию мощности, приведенному ниже). Вот некоторые из основных функций драйвера:
- Простой интерфейс управления шагом и направлением
- Шесть различных шагов разрешения: полный шаг, полушаг, 1/4 шага, 1/8 шага, 1/16 шага и 1/32 шага
- Регулируемый контроль тока позволяет вам установить максимальный выходной ток с помощью потенциометра, что позволяет вам использовать напряжения, превышающие номинальное напряжение вашего шагового двигателя, для достижения более высокой скорости шага
- Интеллектуальное управление измельчением, которое автоматически выбирает правильный текущий режим затухания (быстрое затухание или медленное затухание)
- 2.Диапазон напряжения питания 5-10,8 В
- Встроенный регулятор (внешний источник логического напряжения не требуется)
- Может напрямую взаимодействовать с системами 3,3 В и 5 В
- Тепловое отключение при перегреве, отключение при перегрузке по току и блокировка при пониженном напряжении
- Защита от короткого замыкания на массу, короткого замыкания и короткого замыкания нагрузки
- 4-слойная медная печатная плата на 2 унции для улучшенного отвода тепла
- Открытая паяемая заземляющая площадка под микросхемой драйвера в нижней части печатной платы
- Модуль по размеру, распиновке и интерфейсу во многом соответствует нашим держателям драйверов шагового двигателя A4988 (дополнительную информацию см. Внизу этой страницы).
Этот продукт поставляется со всеми компонентами для поверхностного монтажа, включая микросхему драйвера DRV8834, которые установлены, как показано на рисунке продукта.
В качестве альтернативных драйверов шаговых двигателей с совместимостью выводов, которые работают с более высокими напряжениями питания двигателя, рассмотрите наш держатель DRV8825, держатель DRV8880, держатель MP6500 и держатель A4988 (также доступны в Black Edition и версии с регуляторами напряжения).
Некоторые униполярные шаговые двигатели (например, с шестью или восемью выводами) могут управляться этим драйвером как биполярные шаговые двигатели. Для получения дополнительной информации ознакомьтесь с часто задаваемыми вопросами. С этим драйвером нельзя использовать униполярные двигатели с пятью выводами.
Оборудование в комплекте
Держатель драйвера шагового двигателя DRV8834 поставляется с одной 1 × 16-контактной разъединяющей полосой 0,1 ″, охватываемой разъемом. Разъемы могут быть впаяны для использования с беспаечными макетными платами или 0,1-дюймовыми гнездовыми разъемами. Вы также можете припаять провода двигателя и другие соединения непосредственно к плате.
Использование драйвера
Минимальная электрическая схема для подключения микроконтроллера к держателю драйвера шагового двигателя DRV8834 (1/4-шаговый режим). |
|---|
Силовые соединения
Драйвер требует, чтобы напряжение питания двигателя 2,5-10,8 В было подключено между VMOT и GND. Этот источник питания должен иметь соответствующие разделительные конденсаторы рядом с платой, и он должен обеспечивать ожидаемый ток шагового двигателя.
Предупреждение: В этой несущей плате используются керамические конденсаторы с низким ESR, что делает ее восприимчивой к деструктивным скачкам напряжения LC, особенно при использовании кабелей питания длиной более нескольких дюймов.При правильных условиях эти выбросы могут превысить максимальное номинальное напряжение 11,8 В для DRV8834 и необратимо повредить плату, даже когда напряжение питания двигателя составляет всего 9 В. Один из способов защитить драйвер от таких всплесков – установить большой (не менее 47 мкФ) электролитический конденсатор между мощностью двигателя (VMOT) и заземлением где-то рядом с платой.
Соединения двигателя
Четырех-, шести- и восьмипроводные шаговые двигатели могут приводиться в движение DRV8834, если они правильно подключены; Ответ на часто задаваемые вопросы подробно объясняет правильную проводку.
Предупреждение: Подключение или отключение шагового двигателя при включенном приводе может привести к его повреждению. (В более общем плане, переустановка чего-либо, пока оно находится под напряжением, вызывает проблемы.)
Размер шага (и микрошага)
Шаговые двигателиобычно имеют размер шага (например, 1,8 ° или 200 шагов на оборот), который применяется к полному шагу. Микрошаговый драйвер, такой как DRV8834, обеспечивает более высокое разрешение, разрешая промежуточные положения ступенек, что достигается за счет подачи питания на катушки с промежуточными уровнями тока.Например, управление двигателем в четвертьшаговом режиме даст двигателю с 200 шагами на оборот 800 микрошагов на оборот за счет использования четырех различных уровней тока.
Входы селектора разрешения (размера шага) (M0 и M1) позволяют выбирать из шести разрешений шага в соответствии с таблицей ниже. M0 по умолчанию плавающий, в то время как M1 имеет внутренний понижающий резистор 200 кОм, поэтому оставление этих двух выводов выбора микрошага отключенными приводит к переходу в 1/4 ступенчатый режим. Для правильной работы микрошаговых режимов необходимо установить достаточно низкий предел тока (см. Ниже), чтобы сработало ограничение тока.В противном случае промежуточные уровни тока не будут поддерживаться должным образом, и двигатель будет пропускать микрошаги.
| M0 | M1 | Микрошаг Разрешение |
|---|---|---|
| Низкая | Низкая | Полный шаг |
| Высокая | Низкая | Полушаг |
| Плавающий | Низкая | 1/4 шага |
| Низкая | Высокая | 1/8 шага |
| Высокая | Высокая | 1/16 шага |
| Плавающий | Высокая | 1/32 шага |
Управляющие входы
Каждый импульс на входе STEP соответствует одному микрошагу шагового двигателя в направлении, выбранном выводом DIR.Оба этих входа по умолчанию подтягиваются к низкому уровню через внутренние понижающие резисторы 200 кОм. Если вам нужно вращение только в одном направлении, вы можете оставить DIR отключенным.
Микросхема имеет два разных входа для управления состоянием питания: SLEEP и ENBL. Подробные сведения об этих состояниях питания см. В таблице данных. Обратите внимание, что драйвер подтягивает вывод SLEEP к низкому уровню через внутренний понижающий резистор 500 кОм, и он подтягивает вывод ENBL к низкому уровню через внутренний понижающий резистор 200 кОм.Состояние SLEEP по умолчанию не позволяет драйверу работать; этот вывод должен иметь высокий уровень, чтобы активировать драйвер (он может быть подключен напрямую к логическому «высокому» напряжению от 2,5 до 5,5 В, или им можно динамически управлять, подключив его к цифровому выходу микроконтроллера). Состояние вывода ENBL по умолчанию – активировать драйвер, поэтому этот вывод можно оставить отключенным.
Схема контактов nSLEEP и nFAULT на держателях DRV8824 / DRV8825 / DRV8834. |
|---|
DRV8834 также имеет выход FAULT, который устанавливает низкий уровень всякий раз, когда полевые транзисторы H-моста отключены в результате защиты от перегрузки по току или теплового отключения, или когда блокировка минимального напряжения отключает микросхему. Плата-носитель соединяет этот вывод с выводом SLEEP через резистор 10 кОм, который действует как подтягивание НЕИСПРАВНОСТИ всякий раз, когда SLEEP внешне удерживается на высоком уровне, поэтому внешнее подтягивание на выводе НЕИСПРАВНОСТЬ не требуется. Обратите внимание, что несущая панель включает в себя защитный резистор 1,5 кОм, последовательно соединенный с выводом FAULT, что позволяет безопасно подключать этот вывод напрямую к источнику логического напряжения, что может произойти, если вы используете эту плату в системе, разработанной для совместимого по выводам A4988. перевозчик.В такой системе резистор 10 кОм между SLEEP и FAULT будет затем действовать как подтяжка для SLEEP, что делает несущую DRV8834 более прямой заменой A4988 в таких системах (A4988 имеет внутреннюю подтяжку для SLEEP штырь). Чтобы не допустить сбоев в работе вывода SLEEP, любой внешний подтягивающий резистор, который вы добавляете к входу вывода SLEEP, не должен превышать 4,7 кОм.
Дополнительные контактные перемычки
Вывод CONFIG на DRV8834 может использоваться для выбора между его режимом индексатора по умолчанию, который предназначен для управления шаговыми двигателями, и режимом чередования фаз / включения, который может использоваться для управления двумя щеточными двигателями постоянного тока.Он недоступен по умолчанию (во избежание конфликтов при использовании держателя DRV8834 в качестве замены для других наших держателей драйверов шагового двигателя), но его можно подключить к контакту с надписью «(CFG)» путем перемычки поверхностного монтажа. перемычка указана на картинке ниже. Вторую перемычку можно установить перемычкой, чтобы опорное напряжение ограничения тока было доступно на контакте с меткой «(REF)».
Ограничение тока
Для достижения высокой скорости шага мощность двигателя обычно выше, чем было бы допустимо без ограничения активного тока.Например, типичный шаговый двигатель может иметь максимальный номинальный ток 1 А с сопротивлением катушки 5 Ом, что указывает на максимальное питание двигателя 5 В. Использование такого двигателя с 9 В позволит увеличить скорость шага, но ток должен активно быть ограничен до менее 1 А, чтобы предотвратить повреждение двигателя.
DRV8834 поддерживает такое активное ограничение тока, а подстроечный потенциометр на плате может использоваться для установки ограничения тока. Обычно вы хотите установить ограничение тока драйвера на уровне или ниже номинального тока вашего шагового двигателя.Один из способов установить ограничение тока – это перевести драйвер в полношаговый режим и измерить ток, протекающий через одну катушку двигателя, без синхронизации входа STEP. Измеренный ток будет в 0,7 раза больше предельного тока (поскольку обе катушки всегда включены и ограничены примерно 70% от установленного предела тока в полношаговом режиме).
Другой способ установить ограничение тока – измерить напряжение на выводе «ref» и вычислить результирующее ограничение тока (резисторы измерения тока 0.100 Ом ). Напряжение на выводе ref доступно через переходное отверстие, обведенное кружком на нижней шелкографии печатной платы, или на вывод, помеченный «(REF)», если подключена соответствующая перемычка для поверхностного монтажа (см. Выше). Ограничение тока относится к опорному напряжению следующим образом:
Ограничение по току = VREF × 2
Так, например, если у вас есть шаговый двигатель с номиналом 1 А, вы можете установить ограничение тока на 1 А, установив опорное напряжение на 0,5 В.
Примечание: Ток катушки может сильно отличаться от тока источника питания, поэтому не следует использовать ток, измеренный на источнике питания, для установки ограничения тока.Подходящее место для установки измерителя тока – это последовательно с одной из катушек шагового двигателя.
Рекомендации по рассеиванию мощности
ИС драйвера DRV8834 имеет максимальный номинальный постоянный ток 1,5 А на катушку, и в наших тестах эта несущая плата была способна обеспечивать номинальный ток в течение многих минут без необходимости дополнительного охлаждения. DRV8834 может поддерживать пиковые токи до 2,2 А на катушку, но его защита от перегрузки по току может сработать при токах до 2 А, а фактический ток, который вы можете подать, зависит от того, насколько хорошо вы можете поддерживать охлаждение ИС.Печатная плата держателя предназначена для отвода тепла от ИС, но для подачи более 1,5 А на катушку требуется радиатор или другой метод охлаждения.
Этот продукт может нагреться до , достаточно, чтобы обжечься задолго до того, как чип перегреется. Будьте осторожны при обращении с этим продуктом и другими подключенными к нему компонентами.
Обратите внимание, что измерение тока, потребляемого источником питания, обычно не дает точного измерения тока катушки.Поскольку входное напряжение для драйвера может быть значительно выше, чем напряжение катушки, измеренный ток на источнике питания может быть немного ниже, чем ток катушки (драйвер и катушка в основном действуют как импульсный понижающий источник питания). Кроме того, если напряжение питания очень высокое по сравнению с тем, что требуется двигателю для достижения заданного тока, рабочий цикл будет очень низким, что также приведет к значительным различиям между средним и среднеквадратичным токами. Кроме того, обратите внимание, что ток катушки является функцией установленного ограничения тока, но не обязательно, чтобы равнялось настройке ограничения тока.Фактический ток через каждую катушку изменяется с каждым микрошагом. Дополнительную информацию см. В таблице данных DRV8834.
Принципиальная схема
Принципиальная схема держателя низковольтного шагового двигателя DRV8834. |
|---|
Эту схему также можно загрузить в формате pdf (105k pdf).
Ключевые различия между DRV8834 и A4988
Держатель DRV8834 был разработан, чтобы быть максимально похожим на наши держатели драйверов шагового двигателя A4988, и его можно использовать в качестве заменяющего носителя для держателя A4988 во многих приложениях, поскольку он имеет тот же размер, распиновку и общий контроль интерфейс.Однако следует отметить несколько различий между двумя модулями:
DRV8834 Держатель низковольтного шагового двигателя. |
|---|
Держатель драйвера шагового двигателя A4988, Black Edition (показан с оригинальными зелеными резисторами считывания тока 50 мОм). |
|---|
- Вывод, используемый для подачи логического напряжения на A4988, используется как выход FAULT DRV8834, поскольку DRV8834 не требует питания логики (а A4988 не имеет выхода неисправности).Обратите внимание, что безопасно подключать вывод FAULT непосредственно к источнику логики (между выходом IC и выводом для его защиты имеется резистор 1,5 кОм), поэтому модуль DRV8834 можно использовать в системах, разработанных для A4988, которые маршрутизируют логику мощность к этому контакту.
- Вывод SLEEP на DRV8834 не подтягивается по умолчанию, как на A4988, но несущая плата подключает его к выводу FAULT через резистор 10 кОм. Следовательно, системы, предназначенные для A4988, которые направляют логическое питание на вывод FAULT, будут эффективно иметь подтягивание 10k на выводе SLEEP.
- Потенциометр ограничения тока находится в другом месте.
- Отношение между настройкой ограничения тока и напряжением опорного вывода другое.
- DRV8834 предлагает 1/32 шага микрошага; A4988 опускается только до 1/16 шага.
- DRV8834 имеет только два контакта для установки микрошагового режима; у A4988 их три. Таблица выбора шага различается для DRV8834 и A4988 для всех разрешений микрошага, кроме полушагового и полушагового режимов.На DRV8834 вывод M0 необходимо оставить в плавающем (высокоимпедансном) состоянии, чтобы выбрать некоторые из микрошаговых режимов. Режим микрошага по умолчанию на DRV8834 – 1/4 шага, в то время как режим микрошага по умолчанию на A4988 – полный шаг.
- DRV8834 не имеет входа RESET.
- Контакты на держателе DRV8834, соответствующие контактам MS3 и RESET держателя A4988, по умолчанию отключены. Если электрическая совместимость с держателем A4988 не вызывает беспокойства, два разных сигнала (CONFIG и VREF) на держателе DRV8834 могут быть подключены к этим контактам с помощью перемычек для поверхностного монтажа (описанных в разделе «Дополнительные перемычки с контактами» выше).
- Требования к времени для минимальной длительности импульса на выводе STEP различны для двух драйверов. В DRV8834 каждый шаговый импульс высокого и низкого уровня должен быть не менее 1,9 мкс; при использовании A4988 они могут составлять всего 1 мкс.
- DRV8834 поддерживает более низкие напряжения питания, чем A4988, но его максимальное напряжение питания также ниже (2,5–10,8 В против 8–35 В).
- DRV8834 может выдавать больший ток, чем A4988, без какого-либо дополнительного охлаждения (на основе наших полных тестов: 1.5 А на катушку для DRV8834 против 1,2 А на катушку для A4988 Black Edition и 1 А на катушку для оригинального держателя A4988).
- DRV8834 использует другое соглашение об именах для выходов шагового двигателя, но они функционально такие же, как соответствующие контакты на держателе A4988, поэтому одинаковые подключения к обоим драйверам приводят к одинаковому поведению шагового двигателя. На обеих платах первая часть этикетки идентифицирует катушку (так что у вас есть катушки «A» и «B» на DRV8834 и катушки «1» и «2» на A4988).
- Для тех, кто работает с чувствительными к цвету приложениями, обратите внимание, что носитель DRV8834 белый.
Таким образом, носитель DRV8834 достаточно похож на наши носители A4988, поэтому минимальная схема подключения для A4988 является допустимым альтернативным способом подключения DRV8834 к микроконтроллеру:
Альтернативная минимальная электрическая схема для подключения микроконтроллера к держателю драйвера шагового двигателя DRV8834 (1/4-шаговый режим). |
|---|
Люди часто покупают этот товар вместе с:
TB6600 Драйвер шагового двигателя arduino
Что такое шаговый двигатель?Шаговый двигатель – это бесщеточный электродвигатель постоянного тока, который делит полный оборот на ряд равных шагов. Затем на одном из этих шагов можно указать положение двигателя для перемещения и удержания.
Как управлять шаговым двигателем?
Самый быстрый способ управлять шаговым двигателем – это просто использовать драйвер (контроллер) шагового двигателя.И TB6600 arduino – именно то, что вам нужно.
TB6600 arduino – это простой в использовании профессиональный драйвер шагового двигателя, который может управлять двухфазным шаговым двигателем. Он совместим с Arduino и другими микроконтроллерами, которые могут выводить цифровой импульсный сигнал 5 В. Драйвер шагового двигателя TB6600 arduino имеет широкий диапазон входной мощности, источник питания 9 ~ 42 В постоянного тока. И он способен выдавать пиковый ток 4А, чего достаточно для большинства шаговых двигателей.
Драйвер шагового двигателя поддерживает управление скоростью и направлением.Вы можете установить микрошаг и выходной ток с помощью 6 DIP-переключателей. Существует 7 видов микрошагов (1, 2 / A, 2 / B, 4, 8, 16, 32) и 8 видов контроля тока (0,5 А, 1 А, 1,5 А, 2 А, 2,5 А, 2,8 А, 3,0 А). А, 3,5 А) всего. И все сигнальные терминалы имеют изоляцию с помощью высокоскоростных оптопар, что повышает их способность противодействовать высокочастотным помехам.
Как профессиональное устройство, оно может приводить в действие 57, 42-фазный двухфазный, четырехфазный гибридный шаговый двигатель.
Примечание: это новейшая обновленная версия драйвера шагового двигателя TB6600.
Сигнализация DIY с использованием Home Assistant, Konnected и Sonoff RF Bridge
TB6600 Драйвер шагового двигателя 5A и Arduino
Лучший драйвер шагового двигателя для 3D-принтера
Один из способов значительно повысить производительность вашего 3D-принтера – это найти лучший драйвер для шагового двигателя.
Этот важный компонент играет жизненно важную роль в работе вашего 3D-принтера. Не многие владельцы 3D-принтеров знают, что делает этот драйвер. Это не обычная терминология 3D-печати. Однако это важно для бесперебойной работы вашего 3D-принтера и помогает создавать точные и высококачественные модели.
Лучшие драйверы шагового двигателя для вашего 3D-принтера, которые мы собираемся вам показать, действительно могут улучшить его работу. Мы также дадим вам все, что вам нужно знать об этом компоненте.Это включает в себя то, как это работает, лучшие бренды и вещи, которые вы должны учитывать при покупке.
Лучший драйвер шагового двигателя для вашего 3D-принтера – Обзор
В качестве быстрого снимка, это 5 лучших драйверов шагового двигателя, которые вы можете получить для своего 3D-принтера:
- Hobbypower A4988 Драйвер шагового двигателя : Лучший в целом
- Драйвер шагового двигателя SparkFun EasyDriver : Лучшее для универсальности
- Драйвер шагового двигателя BHL DRV8825 : Лучшее для DIY 3D-принтеров
- BIQU A4988 Совместимый драйвер шагового двигателя StepStick : Лучшее для обновления драйверов A4988
- Драйвер шагового двигателя Trinamic TMC2130 : Лучшее для снижения шума 3D-принтера
Hobbypower A4988 Драйвер шагового двигателя | Амазонка
Регулируемый регулятор тока позволяет вам установить максимальный выходной ток с помощью потенциометра, что позволяет вам использовать напряжения, превышающие номинальное напряжение вашего шагового двигателя, для достижения более высокой скорости шага.
Купить на Amazon.comМы получаем комиссию, если вы переходите по этой ссылке и совершаете покупку без дополнительных затрат для вас.
14.07.2021 20:14 GMT
Что такое драйвер шагового двигателя для 3D-принтера?
Драйвер шагового двигателя – это компонент, который вы найдете в каждом 3D-принтере. Это включает в себя как более доступные модели, так и высокопроизводительные машины. Чтобы понять, как это работает, нам нужно взглянуть на фактический процесс печати.
Прежде всего, ваши 3D-модели преобразуются в трехмерные координаты, известные как G-код. Код также содержит информацию о таких вещах, как скорость вентилятора и температура.
Это подается на микроконтроллер 3D-принтера, который, по сути, является базовым компьютером в вашем устройстве. Он считывает код и определяет, какие шаговые двигатели необходимо переместить, чтобы создать ваши 3D-модели.
У каждого шагового двигателя есть драйвер, который позволяет ему двигаться независимо.
Для этого между микроконтроллером и драйвером шагового двигателя передаются импульсы электрического тока, чтобы шаговые двигатели двигались правильно.
Типы драйверов шаговых двигателей для 3D-принтеров
Существуют различные типы драйверов шаговых двигателей, предназначенные для 3D-принтеров.
Вот три основные версии, с которыми вы столкнетесь.
Драйвер шагового двигателя левого и правого каналов
Драйвер шагового двигателя этого типа выполняет вращение с низкой или средней скоростью, что может привести к довольно ограниченным диапазонам выходной мощности.Они по-прежнему могут предлагать полную ротацию, но обычно не предлагают контроль над переменными текущими уровнями.
Многие люди классифицируют драйверы шагового двигателя L / R как низкопроизводительные или, по крайней мере, от низких до средних.
Драйвер шагового двигателя измельчителя – Микрошаг
Драйвер шагового двигателя с прерывателем также известен как ШИМ (широтно-импульсная модуляция) или микрошаговый драйвер. Он работает от одиночного источника высокого напряжения и имеет выходные транзисторы, которые включаются и выключаются автоматически.
Эти типы драйверов шаговых двигателей могут использовать микрошаговый режим. Это означает, что он работает более плавно и более эффективно, поскольку текущая скорость регулируется на всех скоростях. Это обеспечивает повышение производительности, но имеет более высокую цену и, как правило, более сложный дизайн.
Также известно, что они создают RFI (радиочастотные помехи) и иногда могут перегреваться.
Драйвер двухуровневого шагового двигателя
Третий тип драйвера шагового двигателя – двухуровневый, он может использовать как высокие, так и низкие напряжения.
Он работает за счет подачи питания на высокий ток, и когда он достигает необходимого уровня, высокое напряжение отключается. Затем низкое напряжение используется для поддержания этого уровня питания, когда оно используется.
Эти драйверы шагового двигателя обычно более эффективны, чем другие, и, как правило, имеют довольно низкую стоимость.
Преимущества обновления драйвера шагового двигателя
Обновление этого относительно простого компонента вашего 3D-принтера может дать несколько преимуществ.
Давайте кратко рассмотрим, почему обновление драйвера шагового двигателя может быть выгодным.
Они могут снизить уровень шума, производимого вашим 3D-принтером
3D-принтеры– будь то довольно доступные модели или более дорогие многоцветные машины – обычно создают некоторый шум. Некоторые из них будут немного тише, чем другие, однако обновление драйвера шагового двигателя может помочь уменьшить количество децибел, создаваемых вашим принтером.
Некоторые драйверы шаговых двигателей имеют бесшумную конструкцию и используют технологию, снижающую уровень шума.Выбрав правильную модель, вы можете обнаружить, что ваш 3D-принтер работает намного тише, чем раньше.
Можно получить более надежные отпечатки
Поскольку драйвер шагового двигателя – это то, что управляет шаговыми двигателями, обновленная версия может помочь вам получить более надежные отпечатки.
Покупка лучшего драйвера шагового двигателя может помочь двигателям двигаться более точно и с большей точностью позиционирования, что, в свою очередь, обеспечит выгоду для всех частей процесса 3D-печати. Вы сможете печатать более качественные и лучшие объекты, просто обновив довольно простой компонент.
Ваш 3D-принтер экономит электроэнергию
Еще одно преимущество обновления драйвера шагового двигателя заключается в том, что это может повлиять на энергопотребление.
Некоторые драйверы шаговых двигателей умны тем, что они уменьшают ток, когда они не используются. Это снижает общее энергопотребление вашего 3D-принтера. Различные функции безопасности на некоторых драйверах шаговых двигателей также могут помочь предотвратить повреждение в случае скачка напряжения или перегрева.
На что следует обратить внимание при покупке драйвера шагового двигателя
Покупка неправильной модели или драйвера шагового двигателя, не подходящего для того, что вам нужно, может негативно повлиять на работу вашего принтера.Вот некоторые вещи, о которых следует помнить перед покупкой.
Крутящий моментКрутящий момент зависит от размера шагового двигателя и его размера. Проще говоря, чем больше крутящий момент, тем больше мощность. Вам нужно будет принять это во внимание с тем, какой у вас принтер.
Некоторые 3D-принтеры не могут работать с более высоким крутящим моментом, а некоторые не могут правильно работать с более низким крутящим моментом.
ТочностьБольшинство драйверов шагового двигателя, которые являются обновлением вашего стандартного драйвера, вероятно, в любом случае помогут создавать более точные отпечатки.При этом вам нужно учитывать, какая точность вам нужна.
Это может и часто влияет на цену. Точность обычно определяется либо небольшими шагами, либо извилистой зубчатой передачей.
СтоимостьСуществует множество драйверов для шаговых двигателей, и многие производители производят их годами. Это не самые дорогие вещи, которые вы можете купить для 3D-принтера, но даже для небольшого компонента вам нужно учитывать стоимость вашего бюджета.
Помните, что более высокая стоимость драйвера шагового двигателя не обязательно означает, насколько хорошо он будет работать. Многие производители предлагают скидки и тем меньше цена за компонент, чем больше вы покупаете сразу.
СовместимостьНесмотря на то, что большинство драйверов шаговых двигателей совместимы с большинством 3D-принтеров, вы встретите некоторые из них, предназначенные для определенных моделей. Перед покупкой убедитесь, что вы ознакомились с типами и марками 3D-принтеров, с которыми совместим драйвер шагового двигателя, который вы хотите купить.
Лучшие бренды драйверов шагового двигателя
Драйверы шагового двигателя для 3D-принтеров выпускаются разными компаниями и производителями. Это одни из лучших брендов, с которыми вы столкнетесь.
Trinamic
Trinamic – известный производитель драйверов шаговых двигателей для 3D-принтеров. У них есть штаб-квартира в Германии, но у них также есть исследовательские лаборатории в Эстонии и они работают по всему миру.
Trinamic имеет тенденцию фокусироваться на более крупных заказах от крупных компаний, но многие из их шаговых двигателей доступны для покупки.
Pololu
Pololu – американская компания, базирующаяся в Неваде. Они существуют с 2000 года. Они часто уделяют больше внимания отдельным владельцам 3D-принтеров, любителям и энтузиастам, хотя они действительно предлагают большое количество моделей драйверов шаговых двигателей.
BIQU
BIQU – относительный новичок на рынке, они были созданы в 2015 году. Они базируются в городе Шэньчжэнь, Китай, и производят и продают шаговые двигатели на мировом рынке.
Sparkfun
Sparkfun базируется в Колорадо, США. Они производят широкий спектр различных электронных компонентов и были основаны в 2003 году. Драйверы шаговых двигателей – это лишь одна из областей, в которой они производят сотни различных комплектов и плат с открытым исходным кодом.
5 лучших драйверов шагового двигателя для 3D-принтеров
На рынке представлено множество драйверов для шаговых двигателей. Они могут быть относительно простыми компонентами, но они выполняют мощную функцию при 3D-печати. Давайте подробнее рассмотрим 5 лучших драйверов шагового двигателя, которые вы можете купить для своего 3D-принтера.
Драйвер шагового двигателя Hobbypower A4988 – это экономичный драйвер шагового двигателя, который идеально подходит для самодельных 3D-принтеров или даже для многих других доступных моделей.
Эти драйверы поддерживают 1/16 микрошага и обладают различными функциями. Они также могут работать в пятиступенчатом режиме: полный, 1/2, 1/4, 1/8 и 1/16.
Другие функции включают автоматическое определение режима спада тока, синхронное выпрямление для снижения рассеиваемой мощности и тепловое отключение.
Если вам нужен драйвер шагового двигателя для вашего 3D-принтера, не платя много денег, то A4988 – это то, что вам нужно. Дешево, весело и без лишней суеты делает то, что вам нужно.
Плюсы
- Дешевый и доступный драйвер шагового двигателя
- Поможет работе вашего 3D-принтера
- Пятиступенчатые режимы с шагом 1/16 микрошага
Минусы
- Склонен к случайному выгоранию
Регулируемый регулятор тока позволяет вам установить максимальный выходной ток с помощью потенциометра, что позволяет вам использовать напряжения, превышающие номинальное напряжение вашего шагового двигателя, для достижения более высокой скорости шага.
Купить на Amazon.comМы получаем комиссию, если вы переходите по этой ссылке и совершаете покупку без дополнительных затрат для вас.
14.07.2021 20:14 GMT
Следующим драйвером шагового двигателя в нашем списке является драйвер шагового двигателя SparkFun EasyDriver, еще одна довольно недорогая модель.
Это отличный компонент, если вам нужна гибкость в драйвере, поскольку он работает в диапазоне от 7 до 30 В.
Вы можете использовать этот драйвер шагового двигателя с 4-, 6- и 8-проводными шаговыми двигателями, и это здорово.
Тот факт, что он может работать с более высокими напряжениями, означает, что вы можете получить больший крутящий момент и мощность с вашим 3D-принтером. Этот драйвер шагового двигателя также прост в использовании и установке и идеально подходит как для начинающих, так и для опытных пользователей.
Плюсы
- Очень универсален и работает в широком диапазоне напряжений
- Совместим с 4-, 6- и 8-проводными шаговыми двигателями
- Простота установки и использования
Минусы
- Для установки могут потребоваться дополнительные детали
EasyDriver – это простой в использовании драйвер шагового двигателя, совместимый со всем, что имеет импульсный цифровой выход от 0 до 5 В (или от 0 до 3.Импульс 3 В, если Solder SJ2 замкнут на EasyDriver). EasyDriver требует питания от 7 до 30 В для питания двигателя и может питать любое напряжение от шагового двигателя.
Купить на Amazon.comМы получаем комиссию, если вы переходите по этой ссылке и совершаете покупку без дополнительных затрат для вас.
Драйвер шагового двигателя BHL DRV8825 идеально подходит для замены стандартного A4988, который может помочь обновить ваш 3D-принтер.
Это идеальный выбор для любителей DIY, которые создают свои собственные 3D-принтеры.
Он имеет множество вариантов шага, включая полный шаг, 1/2 шага, 1/4 шага, 1/8 шага, 1/16 шага, а также 1/32 шага.
Это один из самых простых в использовании драйверов шагового двигателя, поэтому он очень популярен среди людей, которые создают свои собственные 3D-принтеры. Он также предназначен для людей, впервые обновляющих компонент.
Он имеет функцию отключения при перегреве, а также отключение при перегрузке по току и блокировку при пониженном напряжении.
Регулируемый регулятор тока позволяет вручную настроить выход, при этом это доступный и экономичный компонент.
Плюсы
- Ряд замечательных функций, включая регулируемый контроль тока
- Простота установки и использования для 3D-принтеров DIY
- Недорогое и недорого купить
Минусы
- Некоторые сообщения о том, что он довольно шумный
Драйвер шагового двигателя StepStick, совместимый с BIQU A4988, предлагает пять ступенчатых режимов – полный, 1/2, 1/4, 1/8 и 1/16.
Этот компонент также имеет множество различных функций, включая интеллектуальное управление прерыванием для выбора правильного режима затухания тока.
Существует также схема отключения при перегреве, и они также являются доступным комплектом для вашего 3D-принтера.
Хотя они не работают тихо и издают немного шума, это ни в коем случае не является решающим фактором. Есть некоторые проблемы с потенциометрами в том, что их трудно регулировать, а также они не самые долговечные.
При этом это хорошие драйверы шагового двигателя для 3D-принтеров, которые подойдут всем, кто хочет обновить драйверы a4988.
Плюсы
- Очень хороший выбор для обновления драйверов a4988
- Интеллектуальная система управления измельчением
- Пятиступенчатые режимы и схема теплового отключения
Минусы
- Потенциометры трудно регулировать и не очень прочные
Драйвер шагового двигателя Trinamic TMC2130
Драйвер шагового двигателя Trinamic TMC2130 – лучший выбор, если вам нужен бесшумный компонент для снижения шума, производимого вашим 3D-принтером.
Это обновление предыдущей модели 2100. Этот драйвер шагового двигателя обладает множеством функций, что не всегда хорошо.
Это может немного отвлекать, особенно если вы новичок. Тем не менее, это очень хороший драйвер шагового двигателя за свою цену.
Он имеет бессенсорное обнаружение опрокидывания, бесшумный режим управления током, а также предотвращение опрокидывания и работу при низких температурах.
Высокофункциональный и высокопроизводительный драйвер шагового двигателя для вашего 3D-принтера, но он не подходит для начинающих.
Плюсы
- Имеет большое количество замечательных функций
- Бесшумная и тихая работа
- Обновление до модели 2100
Минусы
- Количество функций может быть огромным
Часто задаваемые вопросы о системах забора холодного воздуха
Вопрос: Нужен ли моему 3D-принтеру драйвер шагового двигателя?
Ответ: Да. Даже если вы этого не знаете, в вашем 3D-принтере будет драйвер шагового двигателя. Он обеспечивает очень ценную функцию при определении того, как шаговые двигатели движутся и работают.
Вопрос: Могу ли я самостоятельно установить драйвер шагового двигателя?
Ответ: В большинстве случаев да. Их несложно установить, и даже если вы новичок, когда дело доходит до 3D-принтеров, у вас должно получиться это сделать. Убедитесь, что внимательно прочтите инструкции и убедитесь, что вы уверены, прежде чем приступить к этому.
Вопрос: Улучшит ли мой 3D-принтер новый драйвер шагового двигателя?
Ответ: Так и должно быть. Если вы обновите стандартную версию на своем 3D-принтере и установите драйвер шагового двигателя с дополнительными функциями, вы должны заметить разницу в печати.Это включает в себя лучший крутящий момент для получения большей мощности и более надежных отпечатков /.
Вопрос: Драйверы шагового двигателя для 3D-принтеров дороги?
Ответ: Нет. Это небольшой компонент, который относительно дешево купить. Поскольку они такие маленькие, вы обычно обнаружите, что чем больше вы покупаете, тем тем лучше будут цены. При этом некоторые продавцы будут предлагать хорошие цены и в небольших количествах. Сам по себе компонент довольно дешев по сравнению с другими частями 3D-принтера.
Вопрос: Будет ли работать драйвер шагового двигателя на моем 3D-принтере?
Ответ: Нет.Большинство из них довольно универсальны с подключениями, однако вы всегда должны быть уверены, что они подходят и совместимы с вашим 3D-принтером. Некоторые из них будут работать только с определенными брендами, а другие – с большинством моделей 3D-принтеров.
Заключение – какие драйверы шагового двигателя лучше для 3D-принтеров
Обновление драйвера шагового двигателя на 3D-принтере дает ряд преимуществ. Хотя все они должны обеспечивать больший крутящий момент, что означает большую мощность и лучшую точность при печати, то, какой вы выберете, зависит от того, что вам нужно.
Например, если вы хотите уменьшить шум с помощью вашего 3D-принтера, то драйвер шагового двигателя Trinamic TMC2130 – лучший вариант. Он оснащен технологией, которая обеспечивает низкий уровень шума или его отсутствие, и вы должны заметить большую разницу при печати.
Драйвер шагового двигателя BHL DRV8825 – лучший выбор для любителей 3D-печати своими руками и тех, кто построил собственный принтер. Его предпочитают многие любители по ряду причин, так как он очень прост в использовании.
Драйвер шагового двигателя SparkFun EasyDriver очень универсален и работает с различными напряжениями, а также с 3D-принтерами.Он обеспечивает больший крутящий момент и мощность, и многим новичкам это тоже нравится, потому что установка проста и проста в использовании.
Наконец, для экономных, Hobbypower A4988 Stepper Motor Driver – лучшая модель. Это дешево и в основном делает то, что вам нужно, без особой помпы. Это по-прежнему мощный драйвер шагового двигателя, который не разорит при покупке.
Hobbypower A4988 Драйвер шагового двигателя | Амазонка
Регулируемый регулятор тока позволяет вам установить максимальный выходной ток с помощью потенциометра, что позволяет вам использовать напряжения, превышающие номинальное напряжение вашего шагового двигателя, для достижения более высокой скорости шага.
Купить на Amazon.comМы получаем комиссию, если вы переходите по этой ссылке и совершаете покупку без дополнительных затрат для вас.
14.07.2021 20:14 GMT Больше новостей
