
Устройство электромагнитной левитации
Необычные схемы
Левитация (от лат. levitas «легкость, легковесность») — физическое явление, при котором предмет без видимой опоры пари́т в пространстве, не касаясь твёрдой поверхности. Люди часто связывают это явление с магией, привидениями, НЛО и прочими невероятных явлениями.
С другой стороны, левитация относительно простое физическое явление для металлических предметов, находящихся в магнитном поле.
Предлагаю вам ознакомиться с устройством, предназначенным для левитации металлических предметов. Принцип работы прост. Для того, чтобы предмет мог висеть в пространстве, вместо постоянного магнита надо использовать электромагнит, управляемый с помощью электронной схемы таким образом, чтобы металлический предмет как бы парил на некотором расстоянии от электромагнита. За положением предмета в пространстве следит оптическая пара, которая состоит из инфракрасного фото и светодиодов.
Рис. 1 Схема устройства электромагнитной левитации
В схема управления устройства магнитной левитации (рис.1) используется операционный усилитель (ОУ) 1458 или 4558 и мощный MOSFET с теплоотводом. Опорное напряжение снимается с делителя R3-R4 и подается на неинвертирующий вход 3 ОУ. Контролируемое напряжение подается с делителя R2-VD2 на вход 2 ОУ. При небольшом изменении напряжения на R2-VD2 появляется сигнал рассогласования, который многократно, усиливается и изменяет напряжение на транзисторе VT1.
Электромагнит можно намотать на каркасе большого старого реле. Катушка содержит 1200 витков провода диаметром 0,4-0,5 мм. Железный сердечник имеет диаметр 8-10 мм.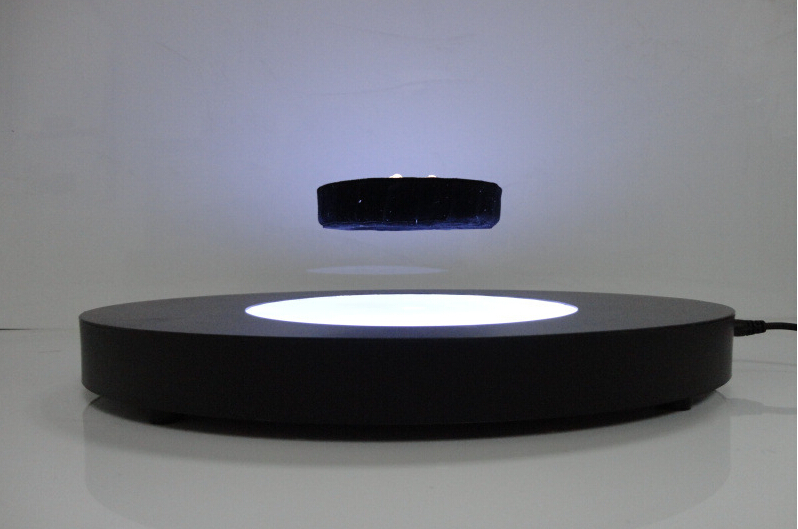
Особых критериев для используемого фотодиода нет, можно использовать ту модель, которая есть у вас под рукой. Но т. к, их характеристики разнятся, резистором R1 настраивают четкую работу схемы при данных параметрах фотодиода.
Если у вас возникнут проблемы с устойчивостью работы устройства (объект вибрирует),то, возможно, потребуется изменить постоянную времени контура. Для этого необходимо экспериментально подобрать номинал конденсатора С1, от 22 мкф до 1мкф, пока цепь не станет работать устойчиво.
Левитация. Электромагнитная и акустическая левитация. Сверхпроводимость
Гимназия №92, 112 классЛЕВИТАЦИЯ
Электромагнитная и акустическая.
Сверхпроводимость
Определение левитации
Преодоление гравитации, при
котором субъект или объект парит в
пространстве, не касаясь
поверхности твёрдой или жидкой
опоры. Левитацией не
считается полёт, совершаемый за
счёт отталкивания от воздуха.

Физикой доказана способность
левитации за счёт электромагнитов,
звуковых волн, сверхпроводимости и
использования диамагнетиков.
Акустическая левитация
ЭЛЕКТРОМАГНИТНАЯ
Реализация, принцип действия и условия
1. Реализация данного вида левитации возможна при использовании электромагнита.
Важнейшими чертами электромагнита являются способность контролировать силу магнитного
поля, полярность и форму магнитного поля. Получается, что электромагнитное поле управляемо,
то есть, создаётся условие возможной свободной левитации. Сваливание и перевёртывание
магнита висящего в воздухе можно предотвратить мгновенным изменением электромагнитного
поля.
2. Левитация происходит за счёт установленного электромагнита, на который подаётся
генерируемый сигнал, способный изменять силу электромагнитного поля в зависимости от
положения левитирующего предмета, управляя сигналом с помощью оптических датчиков на
предмете.
3. Датчики являются необходимым условием электромагнитной левитации, так как способны
контролировать поведение вывешенного магнита или магнитопроницаемого тела.
 Самым
Самымудачным датчиком можно считать Датчик Холла – датчик магнитного поля. Физик Холл заметил,
что если в магнитное поле поместить пластину под напряжением, то есть с протекающим по ней
током, то электроны в этой пластине отклонятся перпендикулярно направлению магнитного
потока. Направление такого отклонения зависит от полярности магнитного поля. Таким
разность потенциалов. Вот эту разность и улавливают датчики Холла.
4. Устойчивость левитации объекта определяет взаимное положение датчиков Холла. Они должны
быть разнесены на как можно большее расстояние друг от друга и находится в одной плоскости.
При правильной регулировке датчиков (при питании батареей 3,7 В) максимальный
потребляемый ток не должен превышать 100-120 mA. Смещение объекта по горизонтали, в
какую либо сторону, вызывает определённое усилие.
Схема строения датчика Холла
Измерительная пластина
Чувствительная поверхность
Активная зона
АКУСТИЧЕСКАЯ
Принцип действия
1.
 Акустическая левитация использует давление акустического излучения от
Акустическая левитация использует давление акустического излучения отзвуковых волн высокой интенсивности. Обычно используются звуковые волны на
ультразвуковых частотах, поэтому звук не слышен человеком. В первую очередь
это связано с высокой интенсивностью звука, необходимого для противодействия
гравитации. В зависимости от свойств объекта, таких как плотность и
сжимаемость, его можно заставить перемещаться либо в узлы акустического
давления (области минимального давления), либо в пучности давления (области
максимального давления).
2. Впервые этот вид левитации был реализован с помощью прототипа с массивом
квадратных акустических излучателей в виде шахматной доски, которые
перемещают объект из одного квадрата в другой, медленно снижая
интенсивность звука, излучаемого из одного квадрата, и одновременно
увеличивая интенсивность звука из другого, позволяя объекту перемещаться.
3. Этот метод сложнее контролировать, чем другие методы, такие как
электромагнитная левитация, но имеет то преимущество, что он может
левитировать непроводящие материалы.
СВЕРХПРОВОДИМОСТЬ
■ Важным свойством сверхпроводников является так эффект Мейснера,
заключающийся в вытеснении постоянного магнитного поля. Из этого
экспериментального наблюдения делается вывод о существовании
незатухающих токов внутри сверхпроводника, которые создают внутреннее
магнитное поле, противоположно направленное внешнему, приложенному
магнитному полю и компенсирующее его, что и создаёт отталкивание друг от
друга (левитацию).
СПАСИБО ЗА
ПРОСМОТР!
МТСТ’16
МТСТ’16
4-я Международная научная конференция «Магнитолевитационные транспортные системы и технологии» (МТСТ’16) прошла в Петербургском государственном университете путей сообщения Императора Александра I с 25 по 27 мая 2016 года.
Количество участников – 140, 20 из них – иногородние специалисты, 9 – зарубежные специалисты из Германии, Китая, Бразилии, Украины.
Конференция МТСТ’16 посвящена решению фундаментальных научных проблем: разработке фундаментальных основ развития отечественной магнитолевитационной технологии для строительства, сертификации и коммерческой эксплуатации грузовых конвейерно-магистральных, пассажирских междугородних линий и линий общественного транспорта в мегаполисах.
В рамках Конференции МТСТ’16 рассматриваются следующие вопросы:
- перманентная левитация;
- разработка и испытания унифицированного сверхпроводникового модуля для систем магнитной левитации;
- боковая стабилизация и линейная тяга грузового транспортного средства;
- устойчивость транспортного средства в замкнутом (с техническим вакуумом) и открытом пространствах.
Рассмотрены физические принципы магнитодинамической левитации и электродинамического торможения.
Исследованы варианты исполнения путевых дискретных треков левитации на примере поперечных кольцевых обмоток Грамма и распределенных беличьих клеток.
Предложены конструктивные схемы узла левитации, обеспечивающие снижение на порядок начальной скорости транспортного средства, при которой возникает левитация, с минимальным использованием активных материалов.
Обсуждено сходство узла левитации с путевым треком в виде развернутой беличьей клетки с асинхронным двигателем с короткозамкнутым (массивным) ротором, а также сходство физических процессов и режимов работы асинхронного двигателя и узла левитации.
Предложено основные теоретические положения, разработанные для асинхронного двигателя с короткозамкнутым ротором, и соответствующие расчетные формулы адаптировать для описания работы узла левитации (прежде всего, касательно развиваемого устройством левитации электромагнитного момента, который в рассматриваемом случае является тормозным). Поскольку путевой дискретный трек (обмотка) левитации неподвижно закреплен, то протекающие в устройстве левитации процессы аналогичны тем, которые имеют место в асинхронном двигателе с короткозамкнутым ротором, находящимся в заторможенном состоянии. В проекте известные из теории асинхронных машин расчетных соотношения адаптированы для описания эффекта левитации и электродинамического торможения магнитолевитационных транспортных средств.
Магнитолевитационный транспорт обычно позиционируется в качестве пассажирского. Однако анализ грузовых автомобильных перевозок, например, по маршруту Санкт-Петербург–Москва, показывает, что магнитолевитационный транспорт может быть востребован и на рынке междугородных грузовых, прежде всего, контейнерных перевозок. Объем грузопотоков в данном направлении характеризуется следующими показателями. Из морских портов Санкт-Петербурга и Ленинградской области в Москву перевозится 1,8 млн. контейнеров в год. Из них более 90% – автотранспортом. Через 5 лет количество перевозимых контейнеров достигнет 4,5 млн. контейнеров в год. Экспертными оценками установлено, что существующая наземная транспортная система на базе железнодорожного и автомобильного транспорта на ближайший период с этими грузовыми потоками справляться не будет. Транспортные проблемы, кроме того, весьма ощутимы в социальном плане. Затраты на транспортировку товара существенно сказываются на его конечной стоимости. Она может на два порядка превысить оптовые закупочные цены у производителя.
Объем грузопотоков в данном направлении характеризуется следующими показателями. Из морских портов Санкт-Петербурга и Ленинградской области в Москву перевозится 1,8 млн. контейнеров в год. Из них более 90% – автотранспортом. Через 5 лет количество перевозимых контейнеров достигнет 4,5 млн. контейнеров в год. Экспертными оценками установлено, что существующая наземная транспортная система на базе железнодорожного и автомобильного транспорта на ближайший период с этими грузовыми потоками справляться не будет. Транспортные проблемы, кроме того, весьма ощутимы в социальном плане. Затраты на транспортировку товара существенно сказываются на его конечной стоимости. Она может на два порядка превысить оптовые закупочные цены у производителя.
Внедрение магнитолевитационной технологии на транспорте будет стимулировать создание высокоинтеллектуального научно-производственного потенциала путем развития национальной фундаментальной и прикладной науки и профессионально-образовательной высшей школы, формирования отечественных проектных организаций и создания наукоемких производств по выпуску новейших образцов транспортного оборудования мирового уровня.
Эксплуатация магнитолевитационного транспорта предусматривает развитие и широкое внедрение спутниковой навигационной технологии для обеспечения диагностики, связи, наземного и бортового автоматического управления в соответствии с Международным стандартом IRIS, который подлежит соответствующей корректировке.
Руководители, состав программного и организационного комитетов 4-й Международной научной конференции МТСТ’16Видеоматериалы
Фотоматериалы
Электрические устройства DIY ваш электромагнитная левитация maglev продукта
Описание и отзывы
Характеристики
электрические устройства DIY ваш электромагнитная левитация maglev продукта
Описание продукта
это электромагнитные maglev устройство, которое может приостановить объекта в воздуха и объект может быть 360 градусов автоматическое вращение в то же время.
это использование магнита для ” однополых отталкивания, привлечение гетеросексуальные ” в природе,так что магниты имеют способность противостоять гравитации, то есть, ” магнитной левитации “.
- объект может быть плавающей и вращается в воздухе, таких как воздуха бонсай, магнитной левитации bluetooth динамик, плавающей настольная лампа и плавающей миру-миру.
- левитация расстояние: 10-40 мм.
- левитация вес: 0-2 кг.
мы применили первый патент в 16 Марта 2006 Года для нижней левитации системы. теперь, это ужезапатентованный в Китае, иСША.
мы проводим исследования и развития услуг,если у вас есть свой дизайн,мы можем работать вместе, чтобы достичь этого.
изображения продукта
HCNT Электрической магнитной подвеске устройства, пусть все плавающие в воздухе:
это устройство системы. система эффект магнита, чтобы плавать и превратить в воздухе.
есть только одна центральная точка может плавать на магнит.
мы делаем базы, чтобы скрыть устройства системы.
электрической магнитной подвеске устройство может приостановить0-2000 гобъектов.
применение HCNT Электрической магнитной подвеске устройства:
1. Floating лампы с беспроводной зарядки (SIM10-F).
2. Плавающей НЛО в форме bluetooth динамик (Mars).
3. Floating starlight ball (M005B-22).
4. Floating бонсай (Воздуха бонсай).
5. Floating настольная лампа (SIM10-170C).
6. Floating яйцевидной формы bluetooth динамик (M005B-23).
7. Floating акриловые светодиодный дисплей (SIM18-40-LG).
мы проводим исследования и развития услуг, если у вас есть свой дизайн, мы можем работать вместе, чтобы достичь этого. Look forward to your design.
почему выбирают нас?
1. Мы обратились первый патент в 16 Марта 2006 Года для нижней левитации системы. теперь, это уже запатентован в Китае и США.
2. Best качество с умеренной конкурентоспособной цене.
3. 16 лет магнитный продукт опыт заставляет нас стать профессиональным производство.
4. Have CE, FCC, ROHS, LVD, ULcertificates.
5. Transprotation тест, привет-pop, и перегрева тест, чтобы убедиться, безопасность.
6. Fire-proof material.
7. Smart технологии установки позволяют гибко отображения.
8.зеленая охрана окружающей среды, без каких-либо излучения и вреда для человеческого организма.
9. Мы считаем, что думаю, мы делаем то, что вы делаете. сохранить цену, чтобы получить Беспроигрышную ситуацию.
[электрические магнитного maglev устройство] Доставка:
заказ образца: 3-5 дней.
в массовом порядке: 30-35 дней.
Информация О компании
HCNT Технологии
HCNT Технология была основана в 1999 году в городе Шэньчжэнь, китай Г-Н роберт Ван, инженер-электронщик и владеет заводом земельных участков, расположенных в Чжаоцин Город и охватывает 27,000 квадратных метров.
мы изобретатель нижняя электромагнитная левитация системы и запатентован в китае, США и Китай.
мы прошли китай поставщиком оценок по TUV.
мы имеем нашу собственную фабрику и R & D команды.
We have strong ability to customize your own design.
мы являемся производителями. ODM/OEM радушен.
магнитного maglev устройства патентов в США и Китае:
КК в HCNT:
упаковка:
наши друзья:
наши культуры и веры:
1. Что Такое срок Оплаты?
T/T, Western Union, Paypal.
2. каков гарантийный срок?
1 год.
3. что такое время доставки?
пример: 3-5 дней.
в массовом порядке: 30-35 дней.
4. вы Можете сделать свой собственный дизайн?
да, мы можем.
что следующая магнитной левитации продукт является подрыв мира?
We look forward to your design.
свяжитесь со мной для получения дополнительной информации.
спасибо для вашего посещения 🙂
Магнитная левитация, что это такое и как это работает | Энергофиксик
Наверняка многие из вас смотрели фильм Звездные Войны, так вот там транспорт левитировал над поверхностью без каких либо усилий и приспособлений. Вы никогда не задумывались, возможна ли левитация в реальном мире? В этой статье я расскажу вам, каким образом сейчас реализуется магнитная левитация на данный момент.
yandex.ruyandex.ru
Что такое магнитная левитация
Ну, а для начала давайте узнаем, что скрывается под термином Левитация. Итак, Левитация – это преодоление гравитации, в результате чего объект имеет статическое положение в пространстве при этом не имея опоры на твердую или жидкую поверхность.
Итак, Левитация – это преодоление гравитации, в результате чего объект имеет статическое положение в пространстве при этом не имея опоры на твердую или жидкую поверхность.
А магнитная левитация – это технология, за счет которой происходит подъем объекта магнитным полем, когда для компенсации гравитационного воздействия применяется магнитное воздействие на объект.
На сегодняшний день существуют четыре варианта реализации магнитной левитации, а именно:
1. Электромагнитная левитация с отслеживающей системой.
2. Диамагнитная левитация.
3. Левитация магнита над сверхпроводником.
4. Левитация под воздействием вихревых токов.
Давайте поговорим о каждом виде подробней.
Электромагнитная левитация с отслеживающей системой
yandex.ruyandex.ru
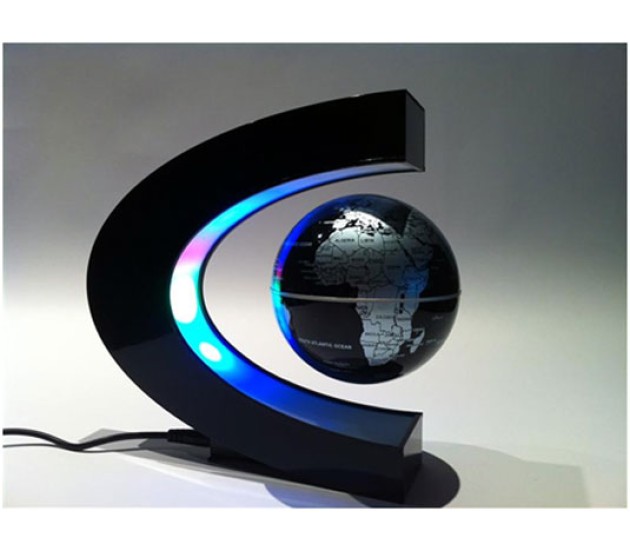
Такой вариант электромагнитной левитации широко используется в сувенирной продукции. Так, например, довольно необычно выглядит глобус, который парит в подставке. А реализован такой вариант левитации следующим образом:
Так, например, довольно необычно выглядит глобус, который парит в подставке. А реализован такой вариант левитации следующим образом:
В подставке закрепляется электромагнит, который соединен в общую цепь с фотореле. При этом пока фотоэлемент не закрыт от источника света, электромагнит работает и тем самым притягивает к себе глобус, как только фотоэлемент закрывается от источника света, электромагнит перестает работать и глобус начинает падать.
Опустившись чуть ниже вновь открывается фотоэлемент, который вновь включает электромагнит и глобус вновь подтягивается.
Получается предмет не стоит на месте, а постоянно падает и опускается, но за счет того, что это происходит очень быстро, для человеческого глаза, кажется, что предмет просто подвешен в воздухе.
Диамагнитная левитация
yandex.ruyandex.ru
В природе существуют такие вещества как диамагнетики, оные намагничиваются против воздействующего на них электромагнитного поля. И при определенных условиях диамагнетик, например, кусочек графита, полностью вытесняет магнитное поле на внешние слои и буквально парит над неодимовыми магнитами, расположенными под ним.
И при определенных условиях диамагнетик, например, кусочек графита, полностью вытесняет магнитное поле на внешние слои и буквально парит над неодимовыми магнитами, расположенными под ним.
При этом, чтобы стабилизировать положение графита магниты необходимо расположить в шахматном порядке. В таком случае стержень окажется в своеобразной ловушке из полей и будет левитировать.
Если взять небольшой неодимовый магнит с индукцией от 11 Тл, то его можно заставить левитировать буквально в ваших руках. Так как вода так же является диамагнетиком.
Достаточно освещен эксперимент с “летающей” лягушкой. Когда маленькое земноводное располагалось над магнитом с индукцией больше 16 Тл и буквально зависало над поверхностью на незначительном расстоянии от магнита.
yandex.ruyandex.ru
Сверхпроводник и левитация магнита – эффект Мейснера
Еще одной разновидностью магнитной левитации является так называемый эффект Мейснера. Суть данного эффекта заключена в следующем:
Суть данного эффекта заключена в следующем:
Берется пластина из иттрия-бария-меди и охлаждается с помощью жидкого азота. При такой сверхнизкой температуре метал становится сверх проводником. И теперь если положить сверху магнит с индукцией от 1мТл, то он будет левитировать. При этом чем выше будет индукция, тем на большую высоту поднимется магнит.
yandex.ruyandex.ru
Фишка этого эффекта заключена в том, что у сверхпроводника есть такое интересное свойство как выталкивание магнитного поля из сверхпроводящей фазы. И магнит, отталкиваясь от образованного магнитного поля обратной направленности, зависает в воздухе.
И этот процесс будет продолжаться ровно до того момента пока охлажденный металл не покинет фазу сверхпроводящего состояния.
Левитация и вихревые токи
yandex.ruyandex.ru
Вихревые токи или по другому – токи Фуко, которые наводятся в достаточно больших проводниках, переменным магнитным полем, так же вполне могут удерживать предметы в левитирующем состоянии.
Допустим, если взять катушку и разместить под ней замкнутый контур из алюминия, то, пропуская переменный ток через катушку, мы увидим как она будет парить над диском.
В этом варианте левитации используется закон Ленца. Согласно ему, создаваемый в катушке либо кольце ток создает такое магнитное поле, направление которого будет противодействовать силе, создавшей его. То есть в каждый момент времени в катушке или диске будет формироваться магнитное поле противоположного направления.
yandex.ruyandex.ru
Таким образом, предмет будет удерживаться в подвешенном положении пока включен переменный ток.
Данный же эффект наблюдается когда неодимовый магнит роняют в медную трубку. Магнитное поле индуцируемое в медной трубке противодействует магнитному полю магнита и тем самым замедляет его падение.
Заключение
Это все, что я хотел вам рассказать о магнитной левитации и вариантов ее реализации. Если статья оказалась вам полезна, то оцените ее лайком. Спасибо за ваше внимание!
Если статья оказалась вам полезна, то оцените ее лайком. Спасибо за ваше внимание!
как человек приближается к освоению левитации — РТ на русском
Физики Бристольского университета научились удерживать и перемещать в воздухе с помощью силы звука крупные предметы. Ещё несколько лет назад такое считалось практически невозможным: акустические тяговые лучи могли управлять только микроскопическими объектами. Учёные считают, что в будущем результаты эксперимента смогут пригодиться в медицине или производстве электроники. О весомом шаге на пути к левитации — в материале RT.
О лягушках и поездах
В прошлом веке слово «левитация» в научном мире вызывало усмешку. Успешных экспериментов, в ходе которых удавалось бы преодолеть земное притяжение без помощи разного рода двигателей, фактически не было.
Лишь в конце 90-х годов ХХ столетия выходцу из СССР, британскому физику Андрею Гейму удалось продемонстрировать прямую диамагнитную левитацию. Это открытие стало известным благодаря яркому опыту с живой лягушкой, которую Гейм заставил левитировать в магнитном поле. Правда, академиков эксперименты Гейма не впечатлили: будущий Нобелевский лауреат (2010 г.) за своё открытие удостоился лишь Шнобелевской премии (вручается за сомнительные научные открытия. — RT) в 2000 году. Однако уже через несколько лет магнитная левитация получила широкое применение.
Правда, академиков эксперименты Гейма не впечатлили: будущий Нобелевский лауреат (2010 г.) за своё открытие удостоился лишь Шнобелевской премии (вручается за сомнительные научные открытия. — RT) в 2000 году. Однако уже через несколько лет магнитная левитация получила широкое применение.
«Шанхайские высокоскоростные поезда — маглевы, которые появились ещё в середине 2000-х, лишены колёс и парят над рельсами, не касаясь земли, под действием мощного электромагнитного поля», — рассказал в беседе с RT доктор физико-математических наук Юрий Балега.
В основу маглевов, скользящих по воздуху в нескольких сантиметрах над рельсами, положен принцип взаимодействия магнитных полюсов. На днище каждого из вагонов находятся мощные электромагниты. Такие же размещены и на рельсах.
«Пока маглевы, передвигающиеся на магнитных подушках, — самый известный пример левитирующих объектов, воплощённых в жизнь. Они могут перемещаться со скоростью выше 500 км/ч. Такие «парящие поезда» есть в Японии, Китае и Южной Корее. В России тоже собираются строить «магнитолевитационные» трассы между Петербургом и Москвой, но когда это будет реализовано, пока неизвестно», — говорит Балега.
В России тоже собираются строить «магнитолевитационные» трассы между Петербургом и Москвой, но когда это будет реализовано, пока неизвестно», — говорит Балега.
Сила звука
Несколько лет назад о значительном прогрессе в области научной левитации сообщили учёные из Бристоля. Чтобы удерживать в воздухе физическое тело, они использовали силу звука — так называемые акустические тяговые лучи. С их помощью создаётся силовое поле, которое удерживает предмет в воздухе. Регулируя интенсивность силового поля, объектом можно управлять: звуковые колебания действуют как «акустический пинцет». До сих пор подобным образом удавалось перемещать лишь крошечные предметы, размеры которых не превышали длину волны луча.
Также по теме
Пространственный прорыв: что узнали учёные о четвёртом измерении Международная группа физиков провела два эксперимента, в ходе которых исследователям удалось зарегистрировать поведение частиц,. ..
Попытки поднимать более крупные объекты заканчивались неудачей: предметы двигались хаотично, постоянно ускоряясь под действием вращающегося звукового поля.
Но в новом эксперименте физики Бристольского университета стабилизировали тяговой луч, использовав расположенные по кругу акустические воронки. Учёным удалось изменить направление скручивания вихрей и взять под контроль скорость их вращения. После этого расстояние между воронками увеличили. Именно это позволило удержать в воздухе более крупный объект.
При работе с ультразвуковыми волнами в 40 кГц, которые могут воспринимать только летучие мыши, исследователи смогли поднять в воздух двухсантиметровые шары из полистирола — самые большие предметы, которые когда-либо удавалось поднять акустическим тяговым лучом.
«У акустических тяговых лучей огромный потенциал. Меня особенно интересует идея бесконтактных производственных линий, на которых можно будет собирать хрупкие объекты, не касаясь их.
Эту технологию можно будет применить, например, в медицине: направить капсулу с лекарством в нужное место организма для точечного воздействия», — считает руководитель исследовательской группы, профессор Бристольского университета Брюс Дринкуотер.
Как отмечает Балега, важность эксперимента заключается в том, что у учёных впервые получилось управлять движением относительно крупных объектов.
«Пока это шарики диаметром два сантиметра. Результаты определённо могут пригодиться в производстве электроники. Левитация поможет перемещать маленькие части полупроводников в воздухе, избегая твёрдых конструкций, которые, управляя этими элементами, могут их случайно повредить», — заключил собеседник RT.
Программное обеспечение для симуляции электромагнитных явлений
Индукционные тигельные печи широко используются при плавке реактивных и чистых металлов, поскольку они практически исключают выбросы в окружающую среду. Во время плавки индукционная печь должна одновременно плавить и поддерживать левитацию расплава в процессе, при котором фаза, форма и свойства груза постоянно меняются. Чтобы спроектировать индукционную тигельную печь, которая удовлетворяет этим условиям, требуется проанализировать сложное взаимодействие электромагнитных, гидростатических и электродинамических принципов.
Чтобы спроектировать индукционную тигельную печь, которая удовлетворяет этим условиям, требуется проанализировать сложное взаимодействие электромагнитных, гидростатических и электродинамических принципов.
Из этой аналитической статьи узнайте больше о том, как одна компания преодолевает трудности проектирования.
Программное обеспечение для симуляции электромагнитных явлений необходимо, чтобы оптимизировать несколько ключевых параметров:
- Генерация электромагнитных сил для контроля расплава с целью снижения контакта со стенками тигля
- Оценка электрического КПД и использования расплава
- Значительное снижение загрязнения
- Снижение затрат
Оптимизация индукционной печи с помощью программного обеспечения для 2D/3D симуляции электромагнитного поля
Преимущества:
- Чистота, достигаемая с помощью контроля плавки и левитации
- Электрический КПД, снижение расходов на коммунальные услуги
- Использование расплава, сокращение количества отходов.

Проектирование и оптимизация плавильной печи для реактивных и чистых металлов
Преимущества:
- Контроль расплава на предмет отсутствия контакта со стенками тигля
- Снижение потребления электроэнергии плавильными печами
- Более высокая степень использования расплава (почти 90%)
Узнайте, как Elmag Corporation использовала симуляцию электромагнитных процессов, чтобы спроектировать индукционную тигельную печь для плавки титана
Проектирование таких печей требует разработки методологии, которая учитывает электромагнитные, тепловые, гидростатические и электродинамические процессы. Загрузите аналитическую статью, чтобы узнать, как компания Elmag упростила эти сложные расчеты.
Products
Simcenter 3D Solutions Simcenter MAGNET SuiteIndustry Sector
Industrial Machinery & Heavy Equipment Industrial MachineryКак построить устройство электромагнитной левитации
«Не левитируйте ложку; это невозможно. Вместо этого попробуйте понять правду. Ложки нет». – п. Матрица (1999)
Вместо этого попробуйте понять правду. Ложки нет». – п. Матрица (1999)
А что, если есть ложка? Или какой-нибудь другой объект. Вы не можете просто полагаться на силу своего разума, чтобы левитировать объекты. Этот проект от Дрю Пола из Drew Paul Designs представляет собой самодельное устройство с электромагнитной левитацией, которое может поднять в воздух небольшой металлический предмет.Используйте его в качестве украшения на следующем званом обеде … или обманите друзей, заставив их думать, что вы обладаете магическими способностями. Просто помните старую поговорку: единственная разница между фокусником и инженером в том, что инженер расскажет вам, как это делается.
| Наблюдайте за работой устройства электромагнитной левитации. |
Для инструментов вам также понадобятся паяльник и припой, сверло и биты до 5/16 дюйма, немного изоленты или термоусадочной пленки, клей и гаечный ключ на 5/16 дюйма.
СКАЧАТЬ ПОЛНУЮ СХЕМУ ЗДЕСЬ:
Для тех, кто не хочет закупать отдельные детали, Дрю Пол также сделал набор всех доступных компонентов.
Основные компоненты
Почему мы не можем просто расположить магнит на нужном расстоянии, чтобы левитировать металлические предметы? Это потому, что по мере того, как железный материал приближается к магнитному полю, сила увеличивается экспоненциально. Это описывается так называемым магнитным законом обратных квадратов:
Интенсивность1 / Интенсивность2 = Расстояние1 / Расстояние2
Итак, нет точки в космосе, где магнит или электромагнит естественным образом подвешивали бы объект, не вступая в контакт.Попав в поле, пути назад нет! … Если только …
Распространяющееся магнитное поле может быть показано на 2D-диаграммах или на магнитной пленке в виде силовых линий, исходящих от полюсов. Даже с помощью осциллографа невозможно многое сказать о движении и направлении поля с помощью только двухмерных снимков (как эта пресловутая иллюзия). При наблюдении в 3D это поле можно увидеть и почувствовать как тороидальное, а во времени мы начинаем видеть, что возникает распространяющееся спиральное поле.То же самое и в случае электромагнита, и когда поле схлопывается, оно происходит в противоположном направлении. Это описывается тем, что обычно называют Правилами Флемингса для правой и левой руки.
Даже с помощью осциллографа невозможно многое сказать о движении и направлении поля с помощью только двухмерных снимков (как эта пресловутая иллюзия). При наблюдении в 3D это поле можно увидеть и почувствовать как тороидальное, а во времени мы начинаем видеть, что возникает распространяющееся спиральное поле.То же самое и в случае электромагнита, и когда поле схлопывается, оно происходит в противоположном направлении. Это описывается тем, что обычно называют Правилами Флемингса для правой и левой руки.
Итак, теоретически можно было бы создать чередующиеся вихри / спирали, чтобы привести объект в желаемое положение. После выполнения некоторых расчетов на основе приведенной выше формулы мы обнаруживаем, что это возможно только при точном и быстром чередовании этих полей (50000 раз в секунду или больше!)
С помощью нескольких компонентов мы можем создать распространяющееся и коллапсирующее электромагнитное поле, управляемое датчик, который определяет напряженность поля, и цепь, которая прикладывает соответствующее поле к электромагниту.
Сборка корпуса
После завершения корпус должен иметь размеры 8 x 10 x 12 дюймов.
1.) Во-первых, сложите и закрепите наше оргстекло, измерьте и просверлите четыре отверстия рядом с углами, следя за тем, чтобы оставалось пространство от краев, и просверлите сверла постепенно большего размера, чтобы избежать трещин. У вас должно получиться четыре 5/16-дюймовых отверстия в углах всех трех листов оргстекла. Обязательно обратите внимание на ориентацию, чтобы у вас была симметричная посадка.
2.) Далее просверливаем отверстие или дырочки для нашего входного домкрата на одном из листов. Это может отличаться в зависимости от вашего разъема, но должно быть рядом с задней частью корпуса.
3.) Чтобы построить корпус, сначала вставьте четыре стержня с резьбой 5/16 дюйма в отверстия одного из листов. Закрепите лист примерно на 1,5-2 дюйма от основания стержней с помощью одной шайбы и гайки с каждой стороны оргстекла и добавьте резиновую ножку на дно каждого стержня. Прежде чем продолжить, убедитесь, что все выровнено.
Прежде чем продолжить, убедитесь, что все выровнено.
4.) Затем вставьте гайку и шайбу примерно на 3-4 дюйма от верха наших стержней и поместите лист с отверстием для домкрата сверху.
5.) Последний шаг к нашему корпусу – закрепить последний лист оргстекла наверху после того, как вы добавите компоненты из следующего раздела.
Установка и закрепление компонентов
Теперь, когда у нас есть платформа, мы можем создавать и устанавливать наши компоненты.
1.) Эта относительно простая пара цепи и соленоида может быть построена в соответствии с приведенной ниже схемой.Обратите внимание, что SS495 крепится к нижней части катушки. Добавление светодиода позволяет вам проверять мощность, а цифровой вольтметр позволяет обнаруживать нагрузку для целей настройки, оба опционально, они могут быть подключены непосредственно к входу цепи 12 В с помощью встроенного резистора 10 кОм на горячем выводе (+).
2.) Подключите разъем к входу схемы, обращая внимание на принципиальную схему и помните, что корпус разъема является заземлением (-).
3.) Подключите выходы 1 и 2 микросхемы LMD18201 к катушке соленоида.Вставьте стальной болт в центр катушки и в головку болта крепления датчика Холла SS495 A, к которому будут подключены провода в соответствии со схемой.
(на этом этапе может оказаться полезным временно все обезопасить, аккуратно подключить питание и проверить поле соленоида с помощью магнита).
4.) После получения результата закрепите компоненты на платформе. Схема должна быть вертикальной, чтобы обеспечить поток воздуха, рядом с разъемом, сторона соленоида должна быть обращена датчиком вниз, а дополнительный светодиод и ЖК-дисплей можно разместить в любом удобном месте.Добавление термоусадочной пленки и крышек для проводов на этом этапе делает все аккуратным и помогает избежать коротких замыканий и перетягивания проводов.
5.) Чтобы еще больше закрепить и закрыть все, добавьте последний лист оргстекла. Сначала добавьте гайку и шайбу к каждому стержню, затем последний лист оргстекла и отрегулируйте его так, чтобы верхний лист соприкасался с вашим соленоидом, плотно удерживая его на месте. Установив на место и выровняв, добавьте еще четыре шайбы, гайки и колпачок с резиновыми торцевыми колпачками.
Установив на место и выровняв, добавьте еще четыре шайбы, гайки и колпачок с резиновыми торцевыми колпачками.
Настройка и тестирование
1.) При установке соленоида наша ориентация не учитывала полярность. Следовательно, нам нужно будет выбрать правильный полюс нашего магнита, чтобы он был обращен к нашей катушке. Для этого подключите питание и начните вводить магнит в поле соленоида. Одна сторона магнита будет непрерывно притягиваться, а другая будет иметь тенденцию фиксироваться в нескольких дюймах от катушки. Обратите внимание на эту сторону магнита. Будьте осторожны, не подходите слишком близко; оба полюса будут сильно притягиваться, если поднести их слишком близко к катушке под напряжением.
2.) Теперь, когда мы знаем, какой полюс нашего магнита мы используем, мы теперь определим, какой вес он может выдержать. Слишком маленький вес – и груз будет притягиваться без левитации, слишком большой вес – и магнитное поле не сможет преодолеть силу тяжести, и объект упадет.
Метод проб и ошибок должен помочь вам найти оптимальный вес, прикрепив к магниту случайные предметы. Однако вы также можете использовать более точный подход:
Используя маленькие гайки и болты, постепенно добавляйте их к своему магниту и проверяйте.Как только вы найдете точку равновесия (вы почувствуете легкий щелчок, когда она встанет на место), отметьте вес груза с помощью небольших весов. Затем добавьте или уберите небольшой вес, чтобы найти свой диапазон и оптимизировать для устойчивости. Затем вы можете использовать это как ориентир и начать левитировать что-либо в этом диапазоне веса, который обычно составляет 45-55 граммов, не считая самого магнита.
3.) Когда все работает правильно, подключите осциллограф, чтобы увидеть поля в действии!
Вдохновляйте и удивляйте!
Теперь ваше устройство электромагнитной левитации должно быть укомплектовано и функционирует.Он поднимет в воздух любой предмет в определенном диапазоне веса. Для неметаллических предметов попробуйте атаковать их гвоздями или орехами.
Для неметаллических предметов попробуйте атаковать их гвоздями или орехами.
[Все изображения любезно предоставлены Drew Paul / Drew Paul Designs]
Лаборатория сильнопольных магнитов (HFML)
Если оставить в стороне научную фантастику, наука знает разные способы левитации. Например, вертолет можно рассматривать как очень впечатляющее левитационное устройство, которое использует поток воздуха для удержания в воздухе.
Ученые также нашли много способов левитировать объекты без шума или без потребности в бензине или воздухе, используя электромагнитные поля. Левитирующие поезда и левитирующие дисплеи – всего лишь два примера электромагнитной левитации. Однако для удержания объекта на плаву всегда требуется источник энергии (по крайней мере, двигатель или аккумулятор). Удалите аккумулятор, и левитация неизбежно прекратится.
Реальная левитация
Современная наука знает только один способ достичь настоящей левитации, такой, что не требуется дополнительных затрат энергии, а левитация может длиться вечно.Эта левитация использует диамагнетизм, способность многих материалов отводить часть внешнего магнитного поля. Электроны в таких материалах немного меняют свои орбиты, вытесняя внешнее поле. В результате диамагнитные материалы отталкиваются сильными магнитными полями.
Три основные схемы, использующие различные аспекты диамагнетизма, обеспечивают истинную левитацию:
| Сверхпроводящая левитация | |
Обычные вещи, даже люди, могут левитировать, если их поместить в сильное магнитное поле.Хотя большинство обычных материалов, таких как дерево или пластик, кажутся немагнитными, все они обладают очень слабым диамагнетизмом. Такие материалы можно левитировать с помощью магнитных полей силой около 10 Тесла. | |
Очень низкие температуры (такие, что воздух превращается в жидкость) и мощные магниты (такие, что кастрюли вытягиваются с расстояния в несколько метров) – это не то, что вы, вероятно, будете иметь дома, чтобы иметь возможность наблюдать сверхпроводящую или диамагнитную левитацию. |
 На картинке изображен борец сумо, стоящий на платформе с парящим магнитом, который парит над высокотемпературным сверхпроводником. Сверхпроводник охлаждается жидким воздухом и спрятан под платформой.
На картинке изображен борец сумо, стоящий на платформе с парящим магнитом, который парит над высокотемпературным сверхпроводником. Сверхпроводник охлаждается жидким воздухом и спрятан под платформой. Теперь, наконец, появился способ создать миниатюрные левитирующие устройства.
Теперь, наконец, появился способ создать миниатюрные левитирующие устройства.Электромагнитная левитация – полезный инструмент в исследованиях микрогравитации
WA Peifer, «Левитационное плавление – обзор современного состояния», Journal of Metals , 17 (5) (1965), стр. 487–493.
Google ученый
К. Вивес и Б. Форест, «CREM: новый процесс литья, часть I – фундаментальный аспект», Light Metals 1987 , ed. Р. Забрезник (Warrendale, PA: TMS, 1987), стр. 769–778.
Google ученый
Дж. П. Рике и Дж. Л. Мейер, «CREM: новый процесс литья, часть II – промышленные аспекты», Light Metals 1987 , ed. Р. Забрезник (Warrendale, PA: TMS, 1987), стр. 779–784.
Google ученый

J. Szekely et al., Ed., Магнитогидродинамика в технологической металлургии (Warrendale, PA: TMS, 1992).
Google ученый
С. Асаи, изд., Электромагнитная обработка материалов (Нагоя, Япония: ISIJ, 1994).
Google ученый
J.-H. Зонг, Дж. Секели и Г. Лохофер, «Расчеты и эксперименты, касающиеся подъемной силы и поглощения энергии в TEMPUS EML», Acta Astronautica , 29 (5) (1993), стр.371–378.
Google ученый
Э. Шварц и др., «Вычисление электромагнитных силовых полей и явлений переноса в левитированных металлических каплях в условиях микрогравитации», Магнитогидродинамика в технологической металлургии , изд. J. Szekely et al. (Warrendale, PA: TMS, 1992), стр. 81–87.
Google ученый
Э. Шварц и Дж. Секели, «Форма капель жидкого металла в экспериментах с электромагнитной левитацией с учетом внутреннего потока жидкости», Экспериментальные методы материаловедения в условиях микрогравитации, , изд. Р. Шиффман (Warrendale, PA: TMS, 1994), стр. 73–79.
Секели, «Форма капель жидкого металла в экспериментах с электромагнитной левитацией с учетом внутреннего потока жидкости», Экспериментальные методы материаловедения в условиях микрогравитации, , изд. Р. Шиффман (Warrendale, PA: TMS, 1994), стр. 73–79.
Google ученый
Дж. Секели, Явления потока жидкости при обработке металлов (Нью-Йорк: Academic Press, 1979), стр. 208.
Google ученый
Э. Шварц и Дж. Секели, «Математическое моделирование: важный компонент планирования космических экспериментов», Обработка материалов в компьютерный век II , изд. В. Воллер, Н. Эль-Каддах и С.П. Марш (Warrendale, PA: TMS, 1995), стр. 147–161.
Google ученый
A. Gagnoud, J. Etay и M. Gamier, «Процесс левитационного плавления с использованием техники холодного тигля», Transactions ISIJ , 28 (1988), стр. 36–40.
36–40.
CAS Google ученый
А. Гагно и И. Леклерк, «Задача со свободными границами при плавлении с электромагнитной левитацией и непрерывной разливке», IEEE Transactions on Magnetics , 24 (1) (1988), стр. 256–268.
Google ученый
A.J. Местел, «Магнитная левитация жидких металлов», Журнал гидромеханики, , 117 (1982), стр.45–70.
Google ученый
A.D. Sneyd and H.K. Моффатт, «Гидродинамические аспекты процесса левитации-плавления», Journal of Fluid Mechanics , 117 (1982), стр. 45–70.
CAS Google ученый
Г. Лохоэфер, «Теория электромагнитно левитирующей металлической сферы – (I) поглощенная мощность», Журнал прикладной математики SIAM , 49 (1989), стр.567–581.
Google ученый

Г. Лохофер, «Сила и крутящий момент металлической сферы, поднимаемой электромагнитным полем», Quarterly of Applied Mathematics, 51 (3) (1993), стр. 495–518.
Google ученый
Н. Эль-Каддах и Ф.А. Акоста-Гонсалес, «Математическая модель формования расплавленного металла с помощью электромагнитного поля», Литье изделий почти чистой формы , изд.Y. Sahai (Warrendale, PA: TMS, 1988), стр. 423–437.
Google ученый
Н. Эль-Каддах и Т.Т. Натараджан, «Влияние конструкции катушки на форму расплава при плавлении с электромагнитной левитацией», Труды Шестого Международного конгресса по черной металлургии (Нагоя, Япония: ISIJ, 1990), стр. 380–387.
Google ученый
U.B. Сатувалли и Ю.Баязитоглу, «Расчет силы электромагнитов для конической катушки», Металлургические операции B , 24 (5) (1993), стр. 737–748.
737–748.
Google ученый
P.V.R. Сурьянараяна, Ю. Баязитоглу, «Влияние статической деформации и внешних сил на колебания левитирующих капель», Phys. Fluids A , 3 (5) (1991), стр. 967–977.
CAS Google ученый
Н. Эль-Каддах и Дж. Секели, «Электромагнитное силовое поле, поле потока жидкости и температурные профили в левитирующих металлических каплях», Metallurgical Transactions B , 14 (1983), стр. 401–410.
Google ученый
J-H. Зонг, Б. Ли и Дж. Секели, «Электродинамические и гидродинамические явления в магнитно-левитирующих каплях молтена – I. Поведение в устойчивом состоянии) », Acta Astronautica , 26 (6) (1992), стр.435–449.
Google ученый
Э. Шварц, Измерение поверхностного натяжения капель с электромагнитной левитацией в условиях микрогравитации , Ph. D. защитил диссертацию на кафедре материаловедения и инженерии Массачусетского технологического института (1995 г.).
D. защитил диссертацию на кафедре материаловедения и инженерии Массачусетского технологического института (1995 г.).
Google ученый
M.E. Fraser et al., «Измерения поверхностного натяжения чистого жидкого железа и никеля с помощью техники колеблющихся капель», Metallurgical Transactions , 2 (1971), стр.817–823.
CAS Google ученый
Х. Сода, А. Маклин и В.А. Миллер, «Влияние амплитуды колебаний на измерения поверхностного натяжения жидкости с левитирующими металлическими каплями», Metallurgical Transactions, 9B (1978), стр. 145 –147.
CAS Google ученый
B.J. Keene, Использование анализатора Фурье для определения поверхностного натяжения жидких металлов методом левитирующей капли , Отчет NPL DMA (A) 56, NPL, Teddington, U.К. (1982).
Google ученый

л. Эгри и др., «Измерение поверхностного натяжения жидких металлов с использованием левитации, микрогравитации и обработки изображений», International Journal of Thermophysics , 13 (1) (1992), стр 65–74.
CAS Google ученый
J.W.S. Рэлей, «О капиллярных явлениях струй», Труды Лондонского королевского общества, , 29 (1879), стр.71–97
Google ученый
T. Iida and R.I.L. Guthrie, The Physical Properties of Liquid Metals (Oxford, England: Clarendon Press, 1988).
Google ученый
R. Willnecker, D.M. Херлах и Б. Фейербахер, «Бесконтейнерная обработка объемных расплавов Fe-Ni», Applied Physics Letters , 49 (20) (1986), стр. 1339–1341.
CAS Google ученый
H.J. Fecht, W.L. Джонсон, «Концептуальный подход к бесконтактной калориметрии в космосе», Review of Scientifiic Instruments , 62 (5) (1991), с. 1299–1303.
CAS Google ученый
R.K. Вундерлих и др., «Принципы бесконтактной калориметрии А.С.», Бесконтейнерная обработка: методы и приложения, изд. . W. Hofmeister и R. Schiffman (Warrendale, PA: TMS, 1993), стр. 51–56.
Google ученый
Х. Лэмб, «О колебаниях вязкого жидкого шара», Proceedings of the London Math. Общество , 13 (1) (1881), стр. 51–66.
Google ученый
S. Sauerland, Messung der Oberflaechenspannung at levitiertenfluessigen Metalitropfen , Ph.D. докторская диссертация, DLR Кельн / Ахенский университет, Германия (1993).
Google ученый
I.Эгри и Дж. Секели, «Измерение теплофизических свойств в условиях микрогравитации с использованием электромагнитной левитации», Adv. Space Res. , 11 (7) (1991), стр. 263–266.
CAS Google ученый
С. Зауэрланд и др., «Влияние магнитного поля на спектр колебаний левитирующих капель», Бесконтейнерная обработка: методы и приложения , изд. W. Hofmeister и R. Schiffman (Warrendale, PA: TMS, 1993), стр.65–69.
Google ученый
D.L. Каммингс и Д. Блэкберн, «Колебания магнитно-левитирующих асферических капель», Journal of Fluid Mechanics , 224 (1991), стр. 395–416.
Google ученый
Как моделировать устройства электродинамической магнитной левитации
Электродинамическая магнитная левитация может возникать при наличии изменяющихся во времени магнитных полей вблизи проводящего материала.В этом сообщении блога мы продемонстрируем, как смоделировать этот принцип на двух примерах: тестовая задача TEAM для электродинамического левитационного устройства и электродинамического колеса.
Что такое электродинамическая магнитная левитация?
Электродинамическая магнитная левитация имеет место, когда вращающийся и / или движущийся постоянный магнит или катушка с током создают изменяющееся во времени магнитное поле в соседнем проводнике. Изменяющиеся во времени магнитные поля вызывают в проводнике вихревые токи, которые создают противоположное поле.Это, в свою очередь, вызывает силу отталкивания между проводящим материалом и магнитным источником. Этот процесс является основным принципом работы всех систем магнитной левитации.
Магнит, парящий над сверхпроводником. Изображение Жюльена Боброффа – Собственная работа. Под лицензией CC BY-SA 3.0 через Wikimedia Commons.
Анализ эталонной задачи электродинамической левитации
Давайте взглянем на эталонную модель, основанную на задаче 28 Методами переходного электромагнитного анализа (TEAM): Устройство электромагнитной левитации.Эта проблема состоит в круглом алюминиевом проводящем диске, расположенном над двумя цилиндрическими концентрическими катушками, по которым проходят синусоидальные токи в противоположных направлениях. Поперечный разрез установки и размеры показаны на изображении ниже.
Поперечное сечение концентрических катушек и алюминиевого диска. Все размеры указаны в миллиметрах.
Модель показана в 3D ниже.
Трехмерная модель электродинамического левитационного устройства, показывающая левитирующий диск и две концентрические катушки, несущие изменяющиеся во времени токи в противоположных направлениях.
Для моделирования этого устройства в программном обеспечении COMSOL Multiphysics® мы используем двухмерную осесимметричную геометрию. Из-за изменяющихся во времени токов, а также индуцированных вихревых токов, мы моделируем магнитные поля с помощью интерфейса Magnetic Fields в модуле AC / DC. Противоположные токоведущие катушки моделируются с использованием отдельных элементов Coil с моделью Homogenized Multi-Turn Coil . Электродинамическая сила вычисляется в алюминиевой пластине с помощью функции Force Calculation , которая вычисляет в ней тензор напряжений Максвелла.
Динамика твердого тела пластины решается как система обыкновенных дифференциальных уравнений (ОДУ) через интерфейс Global ODE и DAE . ОДУ первого порядка для положения и скорости даются по формуле:
\ frac {dv} {dt} = \ frac {F_ {em} -F_ {g}} {m_p}
\ frac {du} {dt} = v
Поскольку электромагнитная сила динамически изменяется в зависимости от расстояния между пластиной и катушкой, необходимо решить интерфейс Магнитное поле для динамического изменения положения пластины.Поэтому мы моделируем движение пластины с помощью интерфейса Moving Mesh . Мы сравниваем результаты моделирования и контрольные данные TEAM для соответствующего положения качающегося диска на следующем графике.
Сравнение результатов моделирования и данных TEAM вертикальных колебаний пластины как функции времени.
Анимация, изображающая колебания проводящего диска над двумя концентрическими катушками в течение 0,6 секунды.
Моделирование электродинамического колеса в COMSOL Multiphysics®
Механическое вращение источника магнитного поля, такого как радиально намагниченный ротор Хальбаха, индуцирует вихревые токи над пассивной проводящей направляющей (например.г., алюминий). Это создает противоположное магнитное поле, которое взаимодействует с исходным магнитным полем, создавая одновременно подъемную и тяговую силы. Это устройство называется электродинамическим колесом (ЭДВ).
Концепция левитации EDW для высокоскоростных перевозок проиллюстрирована на следующем рисунке. Производство тяги или тормозной силы зависит от относительной скорости скольжения, s l , определяемой как разница между окружной скоростью v c и поступательной скоростью v x .Например, s l = v c – v x , где v c = ω м r o и ω м = 90 ω e P . Здесь ω m – механическая угловая скорость, ω e – электрическая угловая скорость, а P – количество пар полюсов в роторе Хальбаха.
Концептуальный дизайн четырехполюсной магнитной подвески EDW, изображающей токопроводящую дорожку и вращающийся и / или движущийся ротор Хальбаха.
Если окружная скорость больше поступательной скорости (для положительного скольжения), создается сила тяги. Если верно обратное, будет тормозное усилие.
Используя Rotating Machinery в 2D и 3D, интерфейс Magnetic , мы можем объединить как поступательное, так и вращательное движение в одну и ту же модель. Вращательное движение задается с помощью функции «Предписанная скорость вращения» . Поступательное движение маглева (ротора Хальбаха) учитывается в проводящей дорожке с помощью члена Velocity (Lorentz) с противоположным знаком.Постоянные магниты моделируются с использованием стандартных характеристик Закона Ампера с остаточной магнитной индукцией B r = 1,42 [Тл]. Поскольку направление намагничивания радиальное или азимутальное, для удобства мы выбрали цилиндрическую систему координат.
Переходное моделирование выполняется для ступенчатого изменения механической угловой скорости ротора. Результаты для подъемной и осевой сил как функции времени показаны ниже. Эти силы рассчитываются двумя разными методами: тензором напряжений Максвелла (с использованием функции расчета силы) и методом Лоренца.
Сравнение подъемной и осевой сил на магнитной подвеске в зависимости от времени. Показаны результаты как тензора напряжений Максвелла, так и метода Лоренца.
На втором этапе стационарное моделирование выполняется для диапазона поступательных скоростей. Сила сопротивления создается, если нет вращения или окружная скорость меньше поступательной. Результаты моделирования подъемной силы и силы сопротивления для различных скоростей показаны ниже.
Сравнение подъемной силы и силы сопротивления на магнитной подвеске в зависимости от скорости. Показаны результаты как тензора напряжений Максвелла, так и метода Лоренца.
Анимация, изображающая поверхностный график плотности магнитного потока в воздухе и магнитах; плотность тока в направляющей; и контурный график магнитного векторного потенциала, A z . Показаны вращение ротора Хальбаха по часовой стрелке и взаимодействия полей.
Резюме по моделированию электродинамической магнитной левитации
В сегодняшнем сообщении блога мы продемонстрировали, как смоделировать два электродинамических устройства магнитной левитации с помощью COMSOL Multiphysics и дополнительного модуля AD / DC.Мы рассмотрели задачу TEAM 28: Электродинамическое левитационное устройство и сравнили результаты с экспериментальными данными из литературы. Мы также осветили принцип работы электродинамической системы магнитной левитации колеса. Результаты нашего моделирования показывают подъемную силу и силы сопротивления / тяги, создаваемые этой системой для ступенчатого изменения угловой скорости и различных поступательных скоростей.
Дополнительная литература
- Узнайте больше о примерах, представленных в этом сообщении блога:
- Узнайте, как другие использовали COMSOL Multiphysics для решения аналогичных систем магнитной левитации
- Просмотрите другие сообщения блога, представленные в нашей серии электромагнитных устройств
- Хотите начать моделирование систем магнитной левитации в COMSOL Multiphysics или у вас есть дополнительные вопросы о текущих процессах моделирования? Свяжитесь с нами
Электромагнитная левитация придает форму наноматериалам
Изображение, показывающее струноподобные частицы, образованные железом и никелем, и более шаровидные кластеры, образованные медью.Авторы и права: Аббасчиан, Захария и др. al. 2021 г.Для того, чтобы металлические наноматериалы оправдали свои обещания в области энергетики и электроники, они должны буквально выровняться.
Для обеспечения надежных механических и электрических свойств наноматериалы должны иметь согласованные, предсказуемые формы и поверхности, а также масштабируемые методы производства. Инженеры UC Riverside решают эту проблему путем испарения металлов в магнитном поле, чтобы направить повторную сборку атомов металла в предсказуемые формы.Исследование опубликовано в журнале Journal of Physical Chemistry Letters .
Наноматериалы, которые состоят из частиц размером 1-100 нанометров, обычно создаются в жидкой матрице, что является дорогостоящим для массового производства и во многих случаях не может производить чистые металлы, такие как алюминий или магний. Более экономичные производственные технологии обычно включают парофазные подходы для создания облака частиц, конденсирующихся из пара. Они страдают от недостатка контроля.
Реза Аббасчян, заслуженный профессор машиностроения; и Майкл Захария, выдающийся профессор химической и экологической инженерии в инженерном колледже Марлана и Розмари Борн в Калифорнийском университете в Риверсайде; объединили усилия для создания наноматериалов из железа, меди и никеля в газовой фазе. Они поместили твердый металл в мощную катушку электромагнитной левитации, чтобы нагреть металл до температуры выше точки плавления, испаряя его. Капли металла левитировали в газе внутри катушки и двигались в направлениях, определяемых их собственными реакциями на магнитные силы.Когда капли соединялись, они делали это упорядоченным образом, и исследователи узнали, что они могут предсказать, основываясь на типе металла, а также на том, как и где они применяли магнитные поля.
Наночастицы железа и никеля образовывали агрегаты в виде струн, а наночастицы меди образовывали шаровые кластеры. При осаждении на углеродной пленке агрегаты железа и никеля придали пленке пористую поверхность, а углеродные агрегаты – более плотную и твердую поверхность. Свойства материалов на углеродной пленке отражают в большем масштабе свойства каждого типа наночастиц.
Поскольку поле можно рассматривать как «дополнение», этот подход может быть применен к любому источнику генерации наночастиц в паровой фазе, где важна структура, например, к наполнителям, используемым в полимерных композитах для магнитного экранирования или для улучшения электрического или механические свойства.
«Этот« направленный на поле »подход позволяет манипулировать процессом сборки и изменять архитектуру получаемых частиц с объектов с высокой фрактальной размерностью на струноподобные структуры с более низкой размерностью.«Напряженность поля может использоваться для управления масштабом этого устройства», – сказал Захария.
Ученые разработали новый магнитный наноматериал для предотвращения подделки денег
Дополнительная информация: Панкадж Гильдиял и др.Магнитно-направленная парофазная сборка металлических наноструктур с низкой фрактальной размерностью: эксперимент и теория, The Journal of Physical Chemistry Letters (2021). DOI: 10.1021 / acs.jpclett.0c03463 Предоставлено Калифорнийский университет – Риверсайд
Ссылка : Электромагнитная левитация придает форму наноматериалам (2021, 11 мая) получено 30 октября 2021 г. с https: // физ.org / news / 2021-05-electromagnetic-levitation-nanomaterials.html
Этот документ защищен авторским правом. За исключением честных сделок с целью частного изучения или исследования, никакие часть может быть воспроизведена без письменного разрешения. Контент предоставляется только в информационных целях.
Электромагнитная левитация превращает наноматериалы в форму
Для того, чтобы металлические наноматериалы оправдали свои обещания в области энергетики и электроники, им необходимо формировать форму – буквально.
Для обеспечения надежных механических и электрических свойств наноматериалы должны иметь согласованные, предсказуемые формы и поверхности, а также масштабируемые методы производства. Инженеры из Калифорнийского университета в Риверсайде решают эту проблему путем испарения металлов в магнитном поле, чтобы направить повторную сборку атомов металла в предсказуемые формы. Исследование опубликовано в журнале The Journal of Physical Chemistry Letters .
Наноматериалы, которые состоят из частиц размером 1-100 нанометров, обычно создаются в жидкой матрице, что дорого для массового производства и во многих случаях не может производить чистые металлы, такие как алюминий или магний.Более экономичные методы производства обычно включают парофазные подходы для создания облака частиц, конденсирующихся из пара. Они страдают от недостатка контроля.
Реза Аббасчян, заслуженный профессор машиностроения; и Майкл Захария, выдающийся профессор химической и экологической инженерии в инженерном колледже Марлана и Розмари Борн в Калифорнийском университете в Риверсайде; объединили усилия для создания наноматериалов из железа, меди и никеля в газовой фазе.Они поместили твердый металл в мощную катушку электромагнитной левитации, чтобы нагреть металл до температуры выше точки плавления, испаряя его. Капли металла левитировали в газе внутри катушки и двигались в направлениях, определяемых их собственными реакциями на магнитные силы. Когда капли соединялись, они делали это упорядоченным образом, и исследователи узнали, что они могут предсказать, основываясь на типе металла, а также на том, как и где они применяли магнитные поля.
Статья по теме: Использование наноматериалов для восстановления окружающей среды
Наночастицы железа и никеля образовывали нити-подобные агрегаты, а наночастицы меди образовывали шаровые кластеры.При осаждении на углеродной пленке агрегаты железа и никеля придали пленке пористую поверхность, а углеродные агрегаты – более плотную и твердую поверхность. Свойства материалов на углеродной пленке отражают в большем масштабе свойства каждого типа наночастиц.
Поскольку поле можно рассматривать как «дополнение», этот подход может быть применен к любому источнику генерации наночастиц в паровой фазе, где важна структура, например наполнителям, используемым в полимерных композитах для магнитного экранирования или для улучшения электрические или механические свойства.
«Этот« направленный на поле »подход позволяет манипулировать процессом сборки и изменять архитектуру получаемых частиц с объектов с высокой фрактальной размерностью на структуры, похожие на струнные с более низкой размерностью. Напряженность поля может использоваться для управления степенью этого расположения , – сказал Захария.
– Этот пресс-релиз изначально был опубликован на веб-сайте UC Riverside News. Он был отредактирован в соответствии со стилем
Электромагнитное поле определяет форму, образованную молекулами металла в газовой фазе – ScienceDaily
Чтобы металлические наноматериалы выполняли свои обещания для энергетики и электроники, им необходимо формировать форму – буквально.
Для обеспечения надежных механических и электрических свойств наноматериалы должны иметь согласованные, предсказуемые формы и поверхности, а также масштабируемые методы производства. Инженеры UC Riverside решают эту проблему путем испарения металлов в магнитном поле, чтобы направить повторную сборку атомов металла в предсказуемые формы. Исследование опубликовано в The Journal of Physical Chemistry Letters .
Наноматериалы, которые состоят из частиц размером 1-100 нанометров, обычно создаются в жидкой матрице, что является дорогостоящим для массового производства и во многих случаях не может производить чистые металлы, такие как алюминий или магний.Более экономичные производственные технологии обычно включают парофазные подходы для создания облака частиц, конденсирующихся из пара. Они страдают от недостатка контроля.
Реза Аббасчян, заслуженный профессор машиностроения; и Майкл Захария, выдающийся профессор химической и экологической инженерии в инженерном колледже Марлана и Розмари Борн в Калифорнийском университете в Риверсайде; объединили усилия для создания наноматериалов из железа, меди и никеля в газовой фазе.Они поместили твердый металл в мощную катушку электромагнитной левитации, чтобы нагреть металл до температуры выше точки плавления, испаряя его. Капли металла левитировали в газе внутри катушки и двигались в направлениях, определяемых их собственными реакциями на магнитные силы. Когда капли соединялись, они делали это упорядоченным образом, и исследователи узнали, что они могут предсказать, основываясь на типе металла, а также на том, как и где они применяли магнитные поля.
Наночастицы железа и никеля образовывали агрегаты в виде струн, а наночастицы меди образовывали шаровые кластеры.При осаждении на углеродной пленке агрегаты железа и никеля придали пленке пористую поверхность, а углеродные агрегаты – более плотную и твердую поверхность. Свойства материалов на углеродной пленке отражают в большем масштабе свойства каждого типа наночастиц.
Поскольку поле можно рассматривать как «дополнение», этот подход может быть применен к любому источнику генерации наночастиц в паровой фазе, где важна структура, например, к наполнителям, используемым в полимерных композитах для магнитного экранирования или для улучшения электрического или механические свойства.
«Этот« направленный полем »подход позволяет манипулировать процессом сборки и изменять архитектуру получаемых частиц с объектов с высокой фрактальной размерностью на струноподобные структуры с более низкой размерностью.
