1. Предназначен для измерения и учета активной энергии. 2. Учет ведется как по фазным так и по “0” вводам, причем по тем, где ток больше.
Счётчик считает только активную энергию. То что учёт ведётся по обоим провода означает лишь, что ток контролируется как в 0-вом, так и в фазном проводе. Это сделано для предотвращения существующей практики отмотки счётчиков. На деле, скорей всего, счётчик щёлкает только в одну сторону (в отличие от традиционных) и поэтому просто не различает генераторной и нагрузочной стороны. Т.е. АКТИВНАЯ энергия считается в обоих направлениях. Но РЕАКТИВНАЯ энергия при этом всё равно не учитывается.
Murlo писал(а):
извиняюсь, опечатался: 655/675=0.97
Должно получиться гораздо меньше. Скажем в пределах 0,6-0,8. Возможно какая-то ошибка вкралась при снятии показаний счётчика.
Murlo писал(а):
на счетчике 1квт/час 1600 имп. (каждые 8 импульсов счетчик делает щелчок, поэтому для удобства считал 480 а не 500 импульсов).
Подробнее можно описать, что подразумевается под щелчками и что под импульсами? И откуда взялись 480 импульсов, если их 1600? Судя по информации в инете существует несколько версий этого счётчика. Конкретный счётчик имеет механический счётный механизм?
Документация
Что касается типов фильтра, то лучшее подавление высших гармоник, при сохранении основной, может обеспечить только фильтр Отто. Высшие же гармоники не совершают полезной работы, но разогревают провод и железо двигателя, сильно снижая его полезный рабочий ресурс. Кроме этого, фильтр нижних частот ограничивает пусковой ток двигателя, что способствует ухудшению условий запуска и дополнительной перегрузке двигателя компрессора. Кроме этого, входное сопротивление фильтра имеет индуктивный характер, что не есть хорошо для преобразователя. Активное входное сопротивление фильтра Отто получше будет. Murlo, вы уже потратили достаточно времени на испытание двигателя. Логичнее этот процесс довести до завершения и построить фильтр Отто, чем удариться в метания и не довести дело до конца.
_________________ “Древние украли все наши лучшие идеи”- Марк Твен
valvol.ru
На бензиновые двигатели BMW в Европе установят фильтр частиц Otto
Концерн BMW будет оснащать все бензиновые двигатели фильтром частиц Otto (OPF) с июля текущего года. Данное нововведение вызвано новым стандартом выбросов Euro 6d TEMP.
По информации издания Bimmertoday.de, исключением станут BMW X3 и X4, построенные в Спартанбурге – их не будут переоснащать до начала производства в августе 2018 г. Фильтр для твердых частиц бензина Otto гарантирует, что все варианты двигателей BMW B38, B48, B58 и N74 смогут работать в допустимых пределах согласно требований нового цикла WLTP, а также в реальных условиях измерения выбросов (RDE).
Фильтр OPF предотвращает излишне высокий уровень содержания твердых частиц в выхлопных газах выбрасываемых двигателем в окружающую среду. Технически фильтр частиц Otto работает так же, как фильтр твердых частиц дизельного топлива, который использовался в течение многих лет: фильтры встроены в выхлопную систему и собирают мельчайшие частицы, которые образуются во время сгорания топлива.
Напомним, что весной 2018 г. BMW Group переработал все свои дизельные двигатели, чтобы полностью удовлетворить высокие требования WLTP и RDE. В дополнение к обычным элементам очистки выхлопных газов, сажевым фильтрам и хранилищам NOx, все дизельные двигатели оснащены AdBlue injection и SCR-катализатором.
У BMW Club есть страницы в Facebook и в Instagram! Присоединяйтесь, друзья!
Источник: www.bmwclub.ru
Фото: Bimmertoday.de
При использовании материалов ссылка на источник обязательна
www.bmwclub.ru
Векторное управление электродвигателем «на пальцах» / НПФ ВЕКТОР corporate blog / Habr
— Что такое векторное управление?
— Держать ток под 90 градусов.
Термин «векторное управление» электродвигателями знаком всем, кто хоть как-то интересовался вопросом, как с помощью микроконтроллера управлять двигателем переменного тока. Однако обычно в любой книге по электроприводу глава про векторное управление находится где-нибудь ближе к концу, состоит из кучи волосатых формул с отсылками ко всем остальным главам книги. Отчего разбираться в этом вопросе совсем не хочется. И даже самые простые объяснения всё равно держат путь через дифференциальные уравнения равновесия, векторные диаграммы и кучу другой математики. Из-за чего появляются примерно вот такие вот попытки как-то закрутить двигатель без использования мат.части. Но на самом деле векторное управление – это очень просто, если понимать принцип его работы «на пальцах». А там уже и с формулами разбираться в случае надобности будет веселее.
Рассмотрим принцип работы самого простого двигателя переменного тока – синхронной машины с постоянными магнитами. Удобный пример – компас: его магнитная стрелка представляет из себя ротор синхронной машины, а магнитное поле Земли – магнитное поле статора. Без внешней нагрузки (а в компасе её нет, если не считать трение и жидкость, гасящую колебания стрелки) ротор всегда ориентируется по полю статора. Если мы будем держать компас и вращать под ним Землю, то стрелка будет крутиться вслед, совершая работу по перемешиванию жидкости внутри компаса. Но есть и чуть более простой способ – можно взять внешний магнит, например, в виде стержня с полюсами на концах, поле которого значительно сильнее магнитного поля Земли, поднести его к компасу сверху и вращать магнит. Стрелка будет двигаться вслед за вращающимся магнитным полем. В настоящем синхронном двигателе поле статора создается электромагнитами – катушками с током. Схемы обмоток там сложные, но принцип один – они создают статором магнитное поле, направленное в нужную сторону и имеющее нужную амплитуду. Посмотрим на следующий рисунок (Рисунок 1). В центре изображен магнит – ротор синхронного двигателя («стрелка» компаса), а по бокам два электромагнита – катушки, создающие каждая свое магнитное поле, одна в вертикальной оси, другая в горизонтальной. Рисунок 1. Принцип действия синхронной электрической машины
Магнитный поток катушки пропорционален току в ней (в первом приближении). Нас будет интересовать магнитный поток от статора в том месте, где расположен ротор, т.е. в центре рисунка (краевыми эффектами, рассеянием и всем прочим пренебрегаем). Магнитные потоки двух перпендикулярно расположенных катушек векторно складываются, образуя для взаимодействия с ротором один общий поток. Но так как поток пропорционален току в катушке, удобно рисовать непосредственно вектора токов, сонаправив их с потоком. На рисунке показаны некоторые токи
Iα и Iβ, создающие магнитные потоки по осям α и β соответственно. Суммарный вектор тока статора Is создает сонаправленый ему магнитный поток статора. Т.е. по сути Is символизирует внешний магнит, который мы подносили к компасу, но созданный электромагнитами – катушками с током.
На рисунке ротор расположен в произвольном положении, но из этого положения ротор будет стремиться повернуться согласно магнитному потоку статора, т.е. по вектору Is (положение ротора в этом случае показано пунктирной линией). Соответственно, если подать ток только в фазу α, скажем, Iα = 1А, ротор встанет горизонтально, а если в β, вертикально, а если приложить Iβ = -1А то перевернется на 180 градусов. Если запитать ток Iα по закону синуса, а Iβ по закону косинуса от времени, то будет создано вращающееся магнитное поле. Ротор будет следовать за ним и крутиться (как стрелка компаса следует за вращением магнита руками). Это базовый принцип работы синхронной машины, в данном случае двухфазной с одной парой плюсов.
Давайте нарисуем график момента двигателя в зависимости от углового положения вала ротора и вектора тока Is статора – угловую характеристику синхронного двигателя. Эта зависимость синусоидальная (Рисунок 2). Рисунок 2. Угловая характеристика синхронной машины (здесь есть некоторая историческая путаница со знаками момента и угла, из-за чего часто рисуют характеристику перевернутой относительно горизонтальной оси).
Чтобы получить этот график на практике, можно поставить на вал ротора датчик вращающего момента, затем включить любой вектор тока, например, просто подать ток в фазу α. Ротор повернется в соответствующее положение, которое нужно принять за ноль. Потом через датчик момента «руками» нужно поворачивать ротор, фиксируя на графике в каждой точке угол
θ, на который повернули, и момент, который показал датчик. Т.е. нужно растягивать «магнитную пружину» двигателя через датчик момента. Самый большой момент окажется при угле в 90 градусов от вектора тока (от начала). Амплитуда получившегося максимального момента Ммакс пропорциональна амплитуде приложенного вектора тока. Будет приложен 1А, получим, скажем, Ммакс = 1 Н∙м (ньютон*метр, единица измерения вращающего момента), если подадим 2А, получим Ммакс = 2 Н∙м.
Из этой характеристики следует, что двигатель развивает наибольший момент, когда ротор находится под 90° к вектору тока. Так как мы при создании системы управления на микроконтроллере хотим получить от двигателя наибольший момент при минимуме потерь, а потери, в первую очередь, это ток в обмотках, то рациональнее всего ставить вектор тока всегда под 90° к магнитному полю ротора, т.е. перпендикулярно магниту на рисунке 1. Нужно поменять всё наоборот – не ротор едет к задаваемому нами вектору тока, а мы задаем вектор тока всегда под 90° к ротору, как бы он там не вращался, т.е. «прибить» вектор тока к ротору. Регулировать же момент двигателя будем амплитудой тока. Чем больше амплитуда – тем выше момент. А частота вращения, частота тока в обмотках это уже «не наше» дело – какая получится, как ротор будет вращаться, так и будет – мы управляем моментом на валу. Как ни странно, именно это и называется векторным управлением – когда мы управляем вектором тока статора так, чтобы он был под 90° к магнитному полю ротора. Хотя некоторые учебники дают более широкие определения, вплоть до такого, что векторным управлением называют вообще любые законы управления, где задействованы «вектора», но обычно под векторным управлением понимается именно приведенный выше способ управления.
Но как векторное управления достигается на практике? Очевидно, для начала понадобится знать положение ротора, чтобы было относительно чего отмерять 90°. Это проще всего сделать установив, собственно, датчик положения на вал ротора. Потом нужно разобраться, как создать вектор тока, поддерживая желаемые токи в фазах
α и β. На двигатель-то мы прикладываем напряжение, а не ток… Но раз мы хотим что-то поддерживать, то нужно это измерять. Поэтому для векторного управления понадобятся датчики токов фаз. Далее нужно собрать структуру векторного управления в виде программы на микроконтроллере, которая будет делать всё остальное. Чтобы такое объяснение не было похоже на инструкцию «как нарисовать сову», давайте продолжим погружение. Поддерживать ток микроконтроллером можно использовав программный ПИ (пропорционально-интегральный) регулятор тока и ШИМ. Например, структура с регулятором тока для одной фазы α показана ниже (Рисунок 3). Рисунок 3. Замкнутая по току структура управления для одной фазы
Здесь задание тока iα_зад – некая константа, тот ток, который мы хотим поддерживать для этой фазы, например 1А. Задание поступает на сумматор регулятора тока, раскрытая структура которого показана выше. Если читатель не знает, как работает ПИ-регулятор – то увы и ах. Могу лишь посоветовать что-то из этого. Регулятор тока на выходе задает напряжение фазы Uα. Напряжение поступает на блок ШИМ, который рассчитывает задания скважностей (уставок сравнения) для таймеров ШИМ микроконтроллера, формирующих ШИМ на мостовом инверторе из четырех ключей, чтобы сформировать это Uα. Алгоритм может быть разный, например, для положительного напряжения ШИМим правой стойкой пропорционально заданию напряжения, на левой замкнут нижний ключ, для отрицательного ШИМим левой, на правой замкнут нижний. Не забываем добавить мёртвое время! В итоге такая структура делает программный «источник тока» за счет источника напряжения: мы задаем нужное нам значение iα_зад, а данная структура с определенным быстродействием его реализует.
Дальше, возможно, некоторые читатели уже подумали, что до векторной структуры управления осталось дело за малым – нужно поставить два регулятора тока, на каждую фазу по регулятору, и формировать на них задание в зависимости от угла с датчика положения ротора (ДПР), т.е. сделать что-то типа такой структуры (Рисунок 4):
Рисунок 4. Неправильная (наивная) структура векторного управления
Так делать нельзя. При вращении ротора переменные iα_зад и iβ_зад будут синусоидальными, т.е. задание на регуляторы тока будет всё время меняться. Быстродействие регулятора не бесконечно, поэтому при изменении задания он не мгновенно его отрабатывает. Если задание постоянно менять, то регулятор будет всё время его догонять, никогда не достигая. И с ростом скорости вращения двигателя отставание реального тока от заданного будет всё больше и больше, пока желаемый угол в 90° между током и магнитом ротора совсем не перестанет на него быть похожим, а векторное управление не перестанет быть таковым. Поэтому делают по-другому. Правильная структура следующая (Рисунок 5):
Рисунок 5. Структура векторного датчикового управления для двухфазной синхронной машины
Здесь добавились два блока – БКП_1 и БКП_2: блоки координатных преобразований. Они делают очень простую вещь: поворачивают вектор на входе на заданный угол. Причем БПК_1 поворачивает на +ϴ, а БКП_2 на –ϴ. Это вся разница между ними. В иностранной литературе их называют преобразованиями Парка (Park transformation). БКП_2 делает преобразование координат для токов: от неподвижных осей α и β, привязанных к статору двигателя, к вращающимся осям d и q, привязанных к ротору двигателя (используя для этого угол положения ротора ϴ). А БКП_1 делает обратное преобразование, от задания напряжения по осям d и q делает переход к осям α и β. Формул для преобразования координат не привожу, но они простые и очень легко ищутся. Собственно, в них нет ничего сложнее школьной геометрии (Рисунок 6):
Рисунок 6. Координатные преобразования из неподвижных осей α и β, привязанных к статору двигателя, к вращающимся осям осям d и q, привязанных к ротору
То есть вместо «вращения» задания регуляторов (как было в прошлой структуре), вращаются их входы и выходы, а сами регуляторы работают в статическом режиме: токи d, q и выходы регуляторов в установившемся режиме постоянны. Оси d и q вращаются вместе с ротором (так их вращает сигнал с датчика положения ротора), при этом регулятор оси q регулирует как раз тот ток, который в начале статьи я называл «перпендикулярным полю ротора», то есть это моментообразующий ток, а ток d сонаправлен с «магнитом ротора», поэтому он нам не нужен и мы задаём его равным нулю. Такая структура избавлена от недостатка первой структуры – регуляторы токов даже не знают, что что-то где-то крутится. Они работают в статическом режиме: отрегулировали каждый свой ток, вышли на заданное напряжение – и всё, как ротор от них не убегай, они про это даже не узнают: всю работу по повороту делают блоки координатных преобразований.
Для объяснения «на пальцах» можно привести какую-нибудь аналогию.
Для линейного движения пусть это будет, например, городской автобус. Он всё время то разгоняется, то тормозит, то едет назад и вообще ведёт себя как хочет: это ротор двигателя. Также есть вы на автомобиле рядом, едете параллельно: ваша задача быть ровно посредине автобуса: «держать 90°», вы – это регуляторы тока. Если автобус все время меняет скорость – вы тоже должны соответственно менять скорость и всё время её отслеживать. Но теперь сделаем для вас «векторное управление». Вы залезли внутрь автобуса, встали посередине и держитесь за поручень – как автобус не убегай, вы легко справляетесь с задачей «быть посередине автобуса». Аналогично и регуляторы токов, «катаясь» во вращающихся осях d, q ротора, живут легкой жизнью.
Приведенная выше структура действительно работает и используется в современных электроприводах. Только в ней не хватает целой кучи мелких «улучшалок», без которых её уже не принято делать, типа компенсации перекрестных связей, разных ограничений, ослабления поля и т.п. Но базовый принцип именно такой.
А если нужно регулировать не момент привода, а всё-таки скорость (по правильному угловую скорость, частоту вращения)? Ну тогда ставим еще один ПИ-регулятор – регулятор скорости (РС). На вход подаем задание скорости, а на выходе имеем задание момента. Так как ток оси q пропорционален моменту, то можно для упрощения выход регулятора скорости подать сразу на вход регулятора тока оси q, вот так (Рисунок 7):
Рисунок 7. Регулятор скорости для векторного управления Здесь ЗИ – задатчик интенсивности, плавно изменяет свой выход, чтобы двигатель разгонялся с нужным темпом, а не гнал на полном токе до задания скорости. Текущая частота вращения ω взята из обработчика датчика положения ротора, так как ω это производная от углового положения ϴ. Ну или можно просто время между импульсами датчика засекать…
Как сделать тоже самое для трехфазного двигателя? Ну, собственно, ничего особенного, добавляем еще один блок и меняем модуль ШИМ (Рисунок 8).
Рисунок 8. Структура векторного датчикового управления для трехфазной синхронной машины
Трехфазные токи, точно так же как и двухфазные, служат для одной цели – создать вектор тока статора Is, направленный в нужную сторону и имеющий нужную амплитуду. Поэтому трехфазные токи можно просто пересчитать в двухфазные, а дальше оставить ту же систему управления, что уже была собрана для двухфазной машины. В англоязычной литературе такой «пересчёт» называют преобразованиями Кларк – Clarke transformation (Эдит Кларк – это она), у нас — фазными преобразованиями. В структуре на рисунке 8, соответственно, эта операция производится блоком фазных преобразований. Делаются они опять при помощи курса школьной геометрии (Рисунок 9):
Рисунок 9. Фазные преобразования – из трех фаз к двум. Для удобства принимаем равенство амплитуды вектора Is амплитуде тока в фазе
Думаю, комментарии не нужны. Немного слов про ток фазы C. Туда можно не ставить датчик тока, так как три фазы двигателя соединены в звезду, и по закону Кирхгофа всё, что втекло через две фазы, должно вытечь из третьей (если, конечно, у вас в двигателе не пробита изоляция, и половина не утекла куда-то на корпус), поэтому ток фазы C вычисляют как скалярную сумму токов фаз A и B со знаком минус. Хотя третий датчик иногда ставят чтобы снизить погрешность измерений.
Также нужна полная переделка модуля ШИМ. Обычно для трехфазных двигателей используют трехфазный шестиключевой инвертор. На рисунке задание напряжения поступает всё ещё в двухфазных осях. Внутри модуля ШИМ с помощью обратных фазных преобразований можно пересчитать это в напряжения фаз A, B, C, которые надо приложить в этот момент к двигателю. А вот что делать дальше… Возможны варианты. Наивный метод – это задать на каждую стойку инвертора скважность, пропорциональную желаемому напряжению плюс 0.5. Это называется синусоидальной ШИМ. Именно такой метод применил автор в habrahabr.ru/post/128407. В этом методе всё хорошо, кроме того, что таким методом будет недоиспользован инвертор по напряжению – т.е. максимальное напряжение, которое будет получено, окажется меньше, чем вы могли бы получить, если бы использовали более совершенный метод ШИМ.
Посчитаем. Пусть у вас есть классический преобразователь частоты, питающийся от промышленной трехфазной сети 380В 50Гц. Здесь 380В это линейное (между фазами) действующее напряжение. Так как в преобразователе стоит выпрямитель, он выпрямит это напряжение и на шине постоянного тока окажется напряжение, равное амплитудному линейному напряжению, т.е. 380∙√2=540В постоянного напряжения (по крайней мере без нагрузки). Если мы применим синусоидальный алгоритм расчета в модуле ШИМ, то амплитуда максимального фазного напряжения, которое получится у нас сделать, окажется равной половине от напряжения на шине постоянного тока, т.е. 540/2=270В. Пересчитаем в действующее фазное: 270/√2=191В. А теперь в действующее линейное: 191∙√3=330В. Теперь можем сравнить: вошло нам 380В, а вышло 330В… И больше с этим типом ШИМ никак нельзя. Для исправления этой проблемы используется так называемый векторный тип ШИМ. В нем на выходе будут снова 380В (в идеальном случае без учета всех падений напряжения). Метод векторной ШИМ никакого отношения к векторному управлению электродвигателем не имеет. Просто в его обосновании снова используется немного школьной геометрии, поэтому он и называется векторным. Однако его работу на пальцах не объяснить, поэтому отправлю читателя к книжкам (в конце статьи) или к википедии. Могу еще привести картинку, которая немного намекает на разницу в работе синусоидальной и векторной ШИМ (Рисунок 10):
Рисунок 10. Изменение потенциалов фаз для скалярной и векторной ШИМ Кстати, а какие датчики положения используются для векторного управления? Чаще всего используются четыре типа датчиков. Это квадратурный инкрементальный энкодер, датчик на основе элементов Холла, абсолютный датчик положения и сельсинный датчик. Квадратурный энкодер не выдает абсолютного положения ротора – по своим импульсам он позволяет лишь определить, сколько вы проехали, но не куда и откуда (как начало и конец связаны с расположением магнита ротора). Поэтому для векторного управления синхронной машиной сам по себе он не подходит. Немного спасает ситуацию его реперная метка (индекс) – она одна на механический оборот, если до неё доехать, то абсолютное положение становится известно, а от неё можно уже отсчитывать сколько проехали квадратурным сигналом. Но как до этой метки доехать в начале работы? В общем, это не всегда удобно. Датчик на основе элементов Холла – это грубый датчик. Он выдает всего несколько импульсов на оборот (в зависимости от кол-ва элементов Холла, для трехфазных двигателей их обычно три, т.е. шесть импульсов), позволяя знать положение в абсолютной величине, но с низкой точностью. Точности обычно хватает, чтобы держать угол вектора тока так, чтобы двигатель по крайней мере ехал вперед, а не назад, но момент и токи будут пульсировать. Если двигатель разогнался, то можно начать программно экстраполировать сигнал с датчика по времени – т.е. строить из грубого дискретного угла линейно изменяющийся угол. Это делается на основе предположения, что двигатель вращается с примерно постоянной скоростью, как-то так (Рисунок 11): Рисунок 11. Работа датчика положения на элементах Холла для трехфазной машины и экстраполяция его сигнала
Часто для серводвигателей используется сочетание энкодера и датчика Холла. В этом случае можно сделать единый программный модуль их обработки, убирая недостатки обоих: делать экстраполяцию угла, приведенную выше, но не по времени, а по меткам с энкодера. Т.е. внутри от фронта до фронта датчика Холла работает энкодер, а каждый фронт Холла чётко инициализирует текущее абсолютное угловое положение. В этом случае неоптимальным (не под 90°) окажется лишь первое движение привода, пока он не доехал до какого-нибудь фронта датчика Холла. Отдельную проблему в этом случае представляет обработка неидеальности и того и другого датчика — симметрично и равномерно элементы Холла редко кто располагает…
В еще более дорогих применениях используют абсолютный датчик положения с цифровым интерфейсом (абсолютный энкодер), который сразу выдает абсолютное положение и позволяет не испытывать описанных выше проблем.
Если в электродвигателе очень жарко, а также когда требуется повышенная точность измерения угла, используют «аналоговый» сельсинный датчик (резольвер, вращающийся трансформатор). Это маленькая электрическая машина, используемая как датчик. Представьте, что в рассмотренной нами синхронной машине на рисунке 1 вместо магнитов стоит еще одна катушка, на которую мы подаем высокочастотный сигнал. Если ротор стоит горизонтально, то сигнал наведется только в катушку статора фазы α, если вертикально – то только в β, если перевернуть его на 180 – то изменится фаза сигнала, а в промежуточных положениях наводится и туда и сюда по закону синуса/косинуса. Соответственно, измеряя амплитуду сигнала в двух катушках, по соотношению этой амплитуды и по фазовому сдвигу можно также определять положение. Установив такую машину как датчик к основной, можно узнавать положение ротора.
Есть еще много экзотических датчиков положения, особенно для сверхвысокоточных применений, например, для изготовления электронных чипов. Там в ход идут уже любые физические явления, чтобы только узнать положение наиболее точно. Их рассматривать не будем.
Как вы поняли, векторное управление достаточно требовательное – и датчиков положения ему наставь, и датчиков тока, и ШИМ ему векторную, и микроконтроллер не абы какой, чтобы всю эту математику обсчитывать. Поэтому для простых применений его упрощают. Для начала можно исключить датчик положения, сделав бездатчиковое векторное управление. Для этого используют немного больше математической магии, находящейся в желтом прямоугольнике (Рисунок 12): Рисунок 12. Структура бездатчикового векторного управления
Наблюдатель – это такой блок, на который подается информация о приложенном к двигателю напряжении (например, из задания на модуль ШИМ) и о токах в двигателе с датчиков. Внутри наблюдателя работает модель электродвигателя, которая, грубо говоря, пытается подстроить свои токи в статоре под измеренные с реального двигателя. Если у неё это получилось, то можно считать, что и положение моделируемого внутри вала ротора тоже совпадает с реальным и им можно пользоваться для нужд векторного управления. Ну это, конечно, совсем упрощённо. Видов наблюдателей таких – не пересчитать. Каждый аспирант по специальности «электропривод» пытается изобрести именно свой, который чем-то лучше других. Основной принцип – отслеживание ЭДС электродвигателя. Поэтому чаще всего бездатчиковая система управления работоспособна только на относительно высокой частоте вращения, где ЭДС большая. А также имеет еще ряд недостатков по сравнению с наличием датчика: нужно знать параметры двигателя, быстродействие привода ограничено (если частота вращения резко меняется, наблюдатель может не успеть её отследить и какое-то время «врать», а то и «развалиться» совсем), настройка наблюдателя – это целая процедура, для его качественной работы нужно точно знать напряжение на двигателе, точно измерять его токи и т.п.
Есть и другой вариант упрощения. Например, можно сделать так называемую «автокоммутацию». В этом случае для трехфазного двигателя отказываются от сложного метода ШИМ, отказываются от сложной векторной структуры и начинают просто включать фазы двигателя по датчику положения на элементах Холла, даже иногда без всякого токоограничения. Ток в фазах получается не синусоидальный, а трапецеидальный, прямоугольный или еще более искаженный. Но стараются сделать так, чтобы средний вектор тока был всё равно под 90 градусов к «магниту ротора» выбором момента включения фаз. При этом, включая фазу под напряжение, неизвестно, когда же в фазе двигателя нарастет ток. На низкой частоте вращения он это делает быстрее, на высокой, где мешает ЭДС машины, медленнее, еще темп нарастания тока зависит от индуктивности двигателя и т.п. Поэтому, даже включая фазы точно в нужный момент времени, совсем не факт, что средний вектор тока окажется в нужном месте и с нужной фазой – он может как опережать, так и запаздывать относительно оптимальных 90 градусов. Поэтому в таких системах вводят настройку «опережения коммутации» – по сути просто время, насколько раньше нужно на фазу двигателя подавать напряжение, чтобы в итоге фаза вектора тока получилась более близка к 90 градусам. По-простому это называют «настройка таймингов». Так как ток в электродвигателе при автокоммутации не синусоидальный, то, если взять рассмотренную выше синусоидальную машину и управлять ей таким вот образом, момент на валу будет пульсировать. Поэтому в двигателях, предназначенных для автокоммутации, часто специальным образом меняют магнитную геометрию ротора и статора, чтобы они стали более подходящими к такому типу управления: ЭДС таких машин делают трапецеидальной, благодаря чему в режиме автокоммутации они работают лучше. Синхронные машины, оптимизированные для автокоммутации, получили название бесколлекторных двигателей постоянного тока (БДПТ) или по-английски BLDC (Brushless Direct Current Motor). Режим автокоммутации также часто называют вентильным режимом, а двигатели с ним работающие – вентильные. Но это всё просто разные названия, ничем не влияющие на суть (но матёрые электроприводчики часто страдают СПГС в вопросах, связанных с этими названиями). Есть неплохое видео, иллюстрирующее принцип работы таких машин. На нем показан обращенный двигатель, где ротор снаружи, а статор внутри:
А вот здесь есть курс статей по таким двигателям и аппаратной части системы управления.
Можно пойти даже на еще большее упрощение. Коммутировать обмотки так, чтобы одна фаза всё время оказывалась «свободна» и к ней не прикладывался ШИМ. Тогда в ней можно измерять ЭДС (наведенное в катушке фазы напряжение), и, когда это напряжение переходит через ноль, использовать это как сигнал датчика положения ротора, потому что фаза этого наведенного напряжения зависит как раз от положения ротора. Получается бездатчиковая автокоммутация, что широко используется в различных простеньких приводах, например, в «регуляторах» для пропеллеров авиамоделей. При этом надо помнить, что ЭДС машины появляется только на относительно высокой частоте вращения, поэтому для старта такие системы управления просто не спеша перебирают фазы, надеясь, что ротор двигателя будет следовать за подаваемым током. Как только ЭДС появилась, включается режим автокоммутации. Поэтому бездатчиковая система (такая простая, да и сложная чаще всего тоже) не подходит для задач, где двигатель должен уметь развивать момент на околонулевых частотах вращения, например, для тягового привода автомобиля (или его модели), сервопривода какого-то механизма и т.п. Зато бездатчиковая система с успехом подходит для насосов и вентиляторов, где как раз и применяется.
Но иногда делают даже и еще большее упрощение. Можно совсем отказаться от микроконтроллера, ключей, датчиков положения и прочего, осуществляя переключение фаз специальным механическим коммутатором (Рисунок 13):
Рисунок 13. Механический коммутатор для переключения обмоток
При вращении ротор сам переключает свои части обмоток, меняя приложенное к ним напряжение, при этом ток в роторе протекает переменный. Коммутатор располагают таким образом, чтобы магнитный поток ротора и статора снова оказывался близким к 90 градусам, дабы достичь максимума момента. Такие двигатели по наивности называют двигателями постоянного тока, но совершенно незаслуженно: внутри-то, после коллектора, ток всё равно переменный!
Все электрические машины работают схожим образом. В теории электропривода даже существует понятие «обобщенная электрическая машина», к которой сводят работу других. Показанные в статье объяснения «на пальцах» никоим образом не могут служить практическим руководством к написанию кода микроконтроллера. В статье рассмотрен хорошо если один процент информации, которая требуется для реализации настоящего векторного управления. Чтобы сделать что-то на практике, нужно, во-первых, знать ТАУ, хотя бы на уровне понимания, как работает ПИ-регулятор. Потом нужно всё-таки изучить математическое описание как синхронной машины, так и синтеза векторного управления. Также изучить векторную ШИМ, узнать, что такое пары полюсов, познакомиться с типами обмоток машин и прочее. Это можно сделать в свежей книге «Анучин А. С. Системы управления электроприводов. МЭИ, 2015», а также в «Калачев Ю. Н. Векторное регулирование (заметки практика)». Следует предостеречь читателя от погружения в формулы «старых» учебников по приводу, где основной упор сделан на рассмотрение характеристик электродвигателей при питании напрямую от трехфазной промышленной сети, без всяких микроконтроллеров и датчиков положения. Поведение двигателей в этом случае описывается сложными формулами и зависимостями, но для задачи векторного управления они почти никакой пользы не несут (если только изучить для саморазвития). Особенно следует с осторожностью относиться к рекомендациям старых учебников, где, например, сказано, что синхронная машина не должна работать на максимуме своего момента, так как там работа неустойчива и грозит опрокидыванием – для векторного управления всё это «вредные советы».
На каком микроконтроллере можно сделать полноценное векторное управление, читайте, например, в нашей статье Новый отечественный motor-control микроконтроллер К1921ВК01Т ОАО «НИИЭТ», а как это отлаживать в статье Способы отладки ПО микроконтроллеров в электроприводе. Также заходите на наш сайт: там, в частности, выложено два занудных видео, где показано на практике, как настроить ПИ-регулятор тока, а также как работает замкнутая по току и векторная бездатчиковая структура управления. Кроме того, можно приобрести отладочный комплект с готовой датчиковой векторной структурой управления на отечественном микроконтроллере.
Продолжение статьи, где рассказано про асинхронные двигатели здесь.
P.S.
У специалистов прошу прощения за не совсем корректное обращение с некоторыми терминами, в частности с терминами «поток», «потокосцепление», «магнитное поле» и другими – простота требует жертв…
habr.com
Векторное управление для асинхронного электродвигателя «на пальцах»
В предыдущей статье «Векторное управление электродвигателем «на пальцах» рассматривалась векторная система управления для синхронных электродвигателей. Статья получилась большой, поэтому вопрос про асинхронные электродвигатели (induction motors) был вынесен в отдельную публикацию. Данная статья является продолжением предыдущей и опирается на приведенные там объяснения принципов работы электродвигателей. Она расскажет об особенностях работы асинхронного двигателя применительно к векторному управлению, а также покажет отличия в структуре векторной системы управления между синхронной и асинхронной машиной. Как работает асинхронный электродвигатель? Наиболее популярное объяснение говорит что-то типа «статор создает вращающееся магнитное поле, которое наводит ЭДС в роторе, из-за чего там начинают течь токи, в результате ротор увлекается полем статора и начинает вращаться». Лично я от такого объяснения всю физику процесса понимать не начинаю, поэтому давайте объясню по-другому, «на пальцах».
Все же видели видео, как магнит взаимодействует с медным цилиндром? Особенно обратите внимание на диапазон времени с 0:49 до 1:03 – это уже самый настоящий асинхронный двигатель:
Эффект происходит из-за появления в цилиндре вихревых токов. Согласно закону электромагнитной индукции, открытого Майклом Фарадеем, при изменении магнитного потока замкнутого контура в нем возникает ЭДС (по-простому считайте, что напряжение). Эта ЭДС, применительно к медному цилиндру, тут же вызывает появление в цилиндре тока. При этом этот ток тоже создает свой, ответный магнитный поток, направленный ровно в противоположную сторону от изменения потока магнита, который мы подносим:
Индукционный ток, возникающий в замкнутом проводящем контуре, имеет такое направление, что создаваемое им магнитное поле противодействует тому изменению магнитного потока, которым был вызван данный ток.
Это можно понимать так, что замкнутый контур сопротивляется изменению магнитного потока внутри себя. Если вы резко поднесёте магнит к медному цилиндру, т.е. сделаете резкое изменение магнитного потока, то в цилиндре потекут такие ответные токи, что магнитное поле внутри цилиндра в первый момент времени будет равно нулю: магнитное поле поднесенного магнита будет полностью скомпенсировано магнитным полем токов цилиндра (с допущениями, конечно). Если магнит поднести и держать, то токи в цилиндре из-за наличия активного сопротивления меди постепенно спадут, а поле цилиндра, создаваемое его токами, пропадет: магнитный поток постоянного магнита «прорвется» внутрь цилиндра, как будто никакого цилиндра и нет. Но стоит попытаться убрать магнит, как цилиндр отреагирует снова – теперь он будет пытаться сам «воссоздать» внутри себя пропадающий магнитный поток, т.е. будет опять сопротивляться изменению магнитного потока, в данном случае его исчезновению. Но что значит «воссоздать магнитный поток»? Это значит, что на какое-то время медный цилиндр можно считать условно «постоянным магнитом» – в нем циркулирует вихревой ток, создающий магнитное поле (на этом же принципе «висят» сверхпроводники в магнитном поле, но это совсем другая история).
Давайте теперь обратимся к конструкции асинхронного двигателя. Ротор асинхронного двигателя условно можно представлять себе также в виде медного цилиндра. Но в реальных конструкциях это некая решётка в виде «беличьей клетки» (рисунок 1) из меди или алюминия, совмещенная с магнитопроводом (шихтованное железо).
Рисунок 1. Ротор асинхронного двигателя типа «беличья клетка» с током в одной из «рамок» беличьей клетки, реагирующей на нарастание внешнего магнитного поля.
На рисунке схематично показано протекание тока в одной из «рамок», т.е. в некоторых прутьях беличьей клетки, если сверху поднести магнит (создать ток в статоре). На самом деле ток в этом случае протекает во всех прутьях, кроме, условно, верхнего и нижнего, для которых изменения потока нет (но они бы среагировали на горизонтально поднесенный магнит).
Помните ещё из начала прошлой статьи картинку со схематическим изображением двухфазной синхронной машины, где ротором был магнит? Давайте теперь сделаем из неё асинхронный двигатель: вместо магнита поставим две перпендикулярные короткозамкнутые катушки, символизирующие медный цилиндр ротора (рисунок 2).
Рисунок 2. Схематическое изображение двухфазного асинхронного двигателя с короткозамкнутым ротором.
Замена цилиндра на две катушки для пояснения принципа работы (или моделирования) корректна, точно также как корректна замена трехфазной обмотки на двухфазную. Только в этом случае мы заменяем… «бесконечнофазную обмотку» цилиндра (бесконечное число рамок) на две катушки с эквивалентной индуктивностью и сопротивлением. Ведь двумя катушками можно создать точно такой же вектор тока и магнитного потока, как и цилиндром.
А теперь давайте сделаем на короткое время из асинхронной машины синхронную. Подадим в катушку оси β постоянный ток и подождем секунды две-три, пока в роторе перестанут течь ответные токи: «поднесем внешний магнит». То есть дождемся спадания токов в роторе, чтобы магнитное поле статора «пронзило ротор» и никто ему не мешал. Что теперь будет, если выключить ток в статоре? Правильно, на те же две-три секунды, пока ток ротора этому противится, мы из ротора получим «обычный магнит» (рисунок 3).
Рисунок 3. Асинхронный двигатель, когда только что выключили постоянный ток по фазе β – течет ток в роторе ird.
Что же мы ждем? Быстрее, пока магнит не пропал, рисуем вдоль него привычную ось d (как в синхронной машине) и перпендикулярную ей ось q, привязанные к ротору. Включаем структуру векторного управления синхронной машиной, подаем ток по оси q, создавая момент, поехали!
Так можно даже действительно сделать несколько оборотов, пока наш сахарный магнит не растаял, а ось d не ушла в небытие. Что же делать? Давайте не будем выключать ток по оси d, подпитывая наш магнит! И опять же сохраним структуру векторного управления синхронной машиной, просто подав задание по оси d (раньше там был ноль). Итак, смотрим на рисунок 4: оси d, q по датчику положения «приделаны» к ротору, двигатель стоит, подан ток по оси d в статоре, что в данном случае для стоячей машины совпадает с осью β. Тока по оси q пока нет: ждем, пока ротор «намагнитится». И вот подаем ток isq (s – статор)! Поехали!
Рисунок 4. Подадим ток в ось d, намагнитив машину, подготовив всё для подачи тока в ось q статора.
Далеко ли мы уедем таким методом барона Мюнхгаузена? К сожалению, нет. Смотрите, что произошло (рисунок 5):
Рисунок 5. А магнит-то сполз!
Двигатель начал крутиться, но через некоторое время после того, как мы подали ток в ось q, образовав суммарный ток is и «прибив» этот вектор к положению ротора, магнит в роторе «съехал»! И встал ровно вдоль вектора is. Ротор же не понимает, где мы нарисовали ему оси d, q… Ему все равно, крутился он или нет. Важно, что его внутренний «наведенный магнит» в конечном счете хочет стать сонаправленным с магнитным потоком статора, «подчиниться» внешнему потоку. Из-за съехавшего магнита двигатель перестанет крутиться: мало того, что между магнитом ротора и током iq нет желаемых 90 градусов, так еще и ток оси d теперь его тянет в противоположную сторону, компенсируя момент, создаваемый током iq. Метод барона Мюнхгаузена не удался.
Что же делать с ускользающим магнитом ротора? А давайте сделаем структуру векторного управления асинхронного двигателя не в осях d,q, приделанных к ротору, а в других осях, приделанных именно к текущему положению «магнита ротора» – назовем их оси x,y, чтобы отличать от d,q. По «научному» – это оси, ориентированные по потокосцеплению ротора. Но как же узнать, где конкретно сейчас это потокосцепление ротора, т.е. куда повернут магнит в роторе? Его положение зависит… во-первых, от положения самого ротора (датчик положения у нас есть, хорошо), во-вторых, от токов статора (создающих поток статора, по которому и собирается в конечном счете повернуться магнит ротора), а в-третьих от параметров роторной цепи – индуктивности и сопротивления «медного цилиндра» (он же беличья клетка, он же роторная обмотка, он же цепь ротора). Поэтому… зная всё это, положение «магнита» ротора можно просто вычислять по нескольким дифференциальным уравнениям. Делает это так называемый наблюдатель потокосцепления ротора, выделенный цветом на итоговой структурной схеме векторного управления асинхронным двигателем (рисунок 6).
Рисунок 6. Векторная датчиковая структура управления асинхронным двигателем
В наблюдатель заводятся показания с датчика положения ротора, а также текущие токи статора в осях α, β. На выходе наблюдателя – положение «магнита» ротора, а именно угол наблюдаемого потокосцепления ротора . В остальном структура полностью аналогична таковой для синхронной машины, только оси d,q переименованы в x,y, а на ось x подано задание тока, который будет поддерживать наш «магнит» в роторе. Также на многих обозначениях добавлен индекс “s”, чтобы показать, что данная величина имеет отношение к статору, а не к ротору. Также надо отметить, что в западной литературе не используют оси x,y: у них ось d всегда направлена по полю ротора, что для асинхронного двигателя, что для синхронного. Наши ученые еще в советское время разделили оси d,q и x,y, чтобы исключить путаницу: d,q прикреплены к ротору, а x,y к полю ротора.
Что же получается? Магнит ротора всё время скользит, сползает от текущего положения на роторе в сторону тока оси y. Чем больше этот ток, тем сильнее скольжение. Наблюдатель в реальном времени вычисляет положение этого магнита и «подкручивает» оси x,y всё время вперед по отношению к осям d,q (положению ротора). Ось x всегда соответствует текущему положению потокосцепления в роторе – положению «магнита». Т.е. оси x,y бегут всегда (в двигательном режиме) немного быстрее вращения ротора, компенсируя скольжение в нем. Токи в роторе, если их измерить или промоделировать, получаются синусоидальными. Только изменяются они не с частотой статорных токов, а с частотой этого скольжения, т.е. очень медленно. Если в статоре промышленного асинхронника 50Гц, то при работе под нагрузкой частота тока в роторе – единицы герц. Вот, собственно, и весь секрет векторного управления для асинхронного двигателя.
Чем векторное управление асинхронным двигателем лучше, чем скалярное? Скалярное управление это такое, когда к двигателю прикладывается напряжение заданной частоты и амплитуды – например, 380В 50Гц. И от нагрузки на роторе оно не зависит – никаких регуляторов токов, векторов… Просто задается частота напряжения и его амплитуда – скалярные величины, а токи и потоки в двигателе пусть сами себе удобное место находят, как хотят. В установившемся режиме работы двигателя векторное управление неотличимо от скалярного – векторное точно также будет прикладывать при номинальной нагрузке те же, скажем, 380В, 50Гц. Но в переходных режимах… если нужно быстро запустить двигатель с заданным моментом, если нужно отрабатывать диаграмму движения, если есть импульсная нагрузка, если нужно сделать генераторный режим с определенным уровнем мощности – всё это скалярное управление или не может сделать, или делает это с отвратительными, медленными переходными процессами, которые могут к тому же «выбить защиту» преобразователя частоты по превышению тока или напряжения звена постоянного тока (двигатель колеблется и может запрыгивать в генераторный режим, к которому преобразователь частоты не всегда приспособлен).
В векторной же структуре «всё под контролем». Момент вы задаете сами, поток тоже. Можно ограничить их на нужном уровне, чтобы не превысить уставок защиты. Можно контролируемо форсировать токи, если кратковременно нужно сделать в несколько раз больший момент. Можно регулировать не только момент двигателя, но и поток (ток оси x): если нагрузка на двигателе мала, то нет никакого смысла держать полный поток в роторе (делать магнит «номинального режима») – можно ослабить его, уменьшив потери. Можно стабилизировать скорость регулятором скорости с высокой точностью и быстродействием. Можно использовать асинхронный привод в качестве тягового (в транспорте), задавая требуемый момент тяги. В общем, для сложных применений с динамичной работой двигателя векторное управление асинхронным двигателем незаменимо.
Также есть отличительные особенности векторного управления асинхронного двигателя от синхронного. Первая – это датчик положения. Если для синхронного привода нам нужно знать абсолютное положение ротора, чтобы понять, где магнит, то в асинхронном приводе этого не требуется. Ротор не имеет какой-то выраженной полюсной структуры, «магнит» в нем постоянно скользит, а если посмотреть в формулы наблюдателя потокосцепления ротора, то там не требуется знания положения: в формулы входит только частота вращения ротора (на самом деле есть разные формулы, но в общем случае так). Поэтому на датчике можно сэкономить: достаточно обычного инкрементального энкодера для отслеживания частоты вращения (или даже тахогенератора), абсолютные датчики положения не требуются. Вторая особенность – управление потоком в асинхронном электродвигателе. В синхронной машине с постоянными магнитами поток не регулируется, что ограничивает максимальную частоту вращения двигателя: перестает хватать напряжения на инверторе. В асинхронном двигателе, когда это случается… просто уменьшаете задание по оси x и едете дальше! Максимальная частота не ограничена! Да, от этого будет снижаться момент двигателя, но, главное, ехать «вверх» можно, в отличие от синхронной машины (по-правде там тоже можно, но недалеко, не для всех двигателей и с кучей проблем).
Точно также существуют бездатчиковые алгоритмы векторного управления асинхронным двигателем, которые оценивают угол потокосцепления ротора не используя сигнал датчика положения (или скорости) вала ротора. Точно также, как и для синхронных машин, в работе таких систем есть проблемы на низкой частоте вращения ротора, где ЭДС двигателя мала.
Также следует сказать пару слов о роторе. Если для промышленных асинхронных двигателей его удешевляют, используя алюминиевую беличью клетку, то в тяге, где массогабаритные показатели важнее, наоборот, могут использовать медный цилиндр. Так, во всеми любимом электромобиле Tesla стоит именно асинхронный электродвигатель с медным ротором (рисунок 7)
Рисунок 7. Ротор асинхронного электродвигателя Tesla Model S в стальной обшивке (фото из разных источников за разные годы)
Вот, собственно, и всё, что я хотел сказать про асинхронный двигатель. В данной обзорной статье не рассмотрены многие тонкости, такие как регулятор потока ротора, возможное построение векторной структуры в других осях координат, математика наблюдателя потокосцепления ротора и многое другое. Как и в конце прошлой статьи, за дальнейшими подробностями отсылаю читателя к современным книгам по приводу, например к «Анучин А. С. Системы управления электроприводов. МЭИ, 2015».
На каком микроконтроллере можно сделать полноценное векторное управление, читайте, например, в статье «Новый отечественный motor-control микроконтроллер К1921ВК01Т ОАО «НИИЭТ», а как это отлаживать в статье «Способы отладки ПО микроконтроллеров в электроприводе». Также наша фирма ООО «НПФ Вектор» предлагает разработку на заказ систем управления электродвигателями и другим электрооборудованием, примеры выполненных проектов можно посмотреть на нашем сайте.
P.S.
У специалистов прошу прощения за не совсем корректное обращение с некоторыми терминами, в частности с терминами «поток», «потокосцепление», «магнитное поле» и другими – простота требует жертв…
habr.com
Правда о пяти мифах частотно регулируемого привода.
Знание принципов работы частотно регулируемого привода (ЧРП) может упростить процесс выбора преобразователя частоты.
Автор: Пол Эйвери, Yaskawa America Inc.
Независимо от того, насколько давно и каким образом, уже обыденные частотные преобразователи пришли в Вашу жизнь, где-то есть тот, кто впервые стукнулся с ЧРП или только рассматривает возможность их применения. Вспомните, когда
вы впервые задумались о применении одного из современных частотных преобразователей с широтно-импульсной модуляцией для двигателя переменного тока. Скорее всего, у вас, на тот момент, было не совсем верное представление
об их возможностях и назначении. В этой статье мы рассмотрим и постараемся развеять пять распространенных мифов о частотно регулируемом приводе.
Рис. 1. Частотный преобразователь
Миф № 1: Выходной сигнал частотного преобразователя является синусоидальным
Людям, так или иначе связанные с эксплуатацией электродвигателей в, как правило, знакома работа асинхронных двигателей переменного тока с использованием пускателей. При пуске электродвигателя, пускатель замыкает контакты обмоток электродвигателя
с фазами
3-х фазной питающей сети. Напряжение каждой фаза представляет собой синусоидальную волну. Приложенное напряжение создает на клеммах электродвигателя тоже синусоидальной формы с той же частотой (можно убедится проверкой напряжения
на клеммах электродвигателя). Пока вроде всё просто и понятно.
А вот что происходит на выходе преобразователя частоты, это совсем другая история. Частотный преобразователь обычно выпрямляет входное трехфазное переменное в постоянное напряжение, которое фильтруется и аккумулируется при помощи больших
конденсаторов звена постоянного тока. Напряжение звена постоянного тока затем инвертируется, для получения переменного напряжения, переменной частоты на выходе. Процесс инверсии осуществляется посредством трех изолированных биполярных транзисторов
(IGBT) с двумя изолированными затворами — по одной паре на выходную фазу (см. Рис 2). Поскольку выпрямленное напряжение инвертируется в переменное, выходное звено называют «инвертором». Включение, выключение, а также
длительность нахождения IGBT-транзисторов в положении ВКЛ или ВЫКЛ может управляться, что и определяет значение частоты выходного напряжения. Отношение выходного среднеквадратического напряжения к выходной частоте определяет магнитный
поток, развиваемый в электродвигателе переменного тока. Когда выходная частота увеличивается, выходное напряжение также должно увеличиваться с той же скоростью, чтобы поддерживать постоянство отношения и, следовательно, постоянную
скорость вращения двигателя. Обычно соотношение между напряжением и частотой поддерживается по линейному закону, что обеспечивает возможность поддержания постоянного крутящего момента.
Рис. 2. Схема инвертора с IGBTтранзисторами.
Результирующий сигнал напряжения, прикладываемый к обмотке двигателя, не является синусоидальным (см. Рис. 3). Обратите внимание, что иногда отношение напряжения по частоте (V / f) может быть отличным от линейного, что характерно
для вентиляторов, насосов или центробежных нагрузок, которые не требуют постоянного крутящего момента, но обеспечивают тем самым возможность экономии электроэнергии.
Рис. 3. Форма сигнала ШИМ напряжения на выходе частотного преобразователя
Как же отразится пилообразная форма питающего напряжения на работе электродвигателя. Асинхронный двигатель является по своей сути большой катушкой индуктивности. А характерной особенностью индукции является ее устойчивость к изменениям
тока. Увеличивается или уменьшается сита ток, индукция будет выступать против этого изменения. Какое же это имеет отношение к форме сигнала напряжения ШИМ на рисунке 3? Вместо того, чтобы позволить импульсу тока увеличиваться в том же
порядке, что и приложенный импульс напряжения, ток начнет медленно возрастать. Когда импульс напряжения закончился, ток плавно уменьшается, а не исчезает мгновенно. В общих чертах это происходит следующим образом: до момента,
когда ток снизился до нуля, поступает следующий импульс напряжения, и ток начинает плавно увеличиваться. Если последующий импульс становятся шире, ток плавно достигает большего значения, чем раньше. В конце концов, текущий сигнал становится
синусоидальным, хотя и с некоторыми зубчатыми переходами (см. Рис. 4).
Рис. 4. Форма сигнала тока на выходе частотного преобразователя
Однако не думайте, что вы можете подключить свой соленоид к фазам выходного напряжения ЧРП. Это всё же не совсем переменное напряжение.
Миф № 2: все частотные преобразователи одинаковы
В общем виде частотно-регулируемый привод сегодня является довольно зрелым продуктом. Большинство коммерчески доступных приводов содержат одни и те же базовые компоненты: мостовой выпрямитель, блок питания, конденсаторный блок постоянного
тока и плата выходного инвертора. Разумеется, существуют различия в алгоритмах управления переключением транзисторов IGBT инвертора, надежности компонентов и эффективности схемы теплового рассеивания. Но основные компоненты остаются
прежними.
Есть также исключения. Например, в некоторых ЧРП инвертер имеет три вывода. Такая схема позволяет выходным импульсам варьироваться от половинного до полного импульса сигнала напряжения (см. Рис. 5).
Рис. 5. Трехуровневый выходной сигнал напряжения
Для достижения трехуровневого выходного сигнала звено инвертора должно иметь в два раза больше выходных переключателей, а также запирающих диодов (см. Рис. 6). Преимущества трехуровневой схемы заключается в уменьшении перенапряжения
на двигателе из-за гармонических волн, снижении синфазных помех, а также снижении паразитных токов на валах и подшипниках.
Рис. 6. Схема трехуровневого инвертора
Матричный инвертор является еще более нетипичным типом ЧРП. Частотные преобразователи с матричными инверторами не имеют шины постоянного тока или мостового выпрямителя. Вместо этого они используют двунаправленные переключатели, которые могут
подключать любое из входящих фазных напряжений к любой из трех выходных фаз (см. Рис. 7). Преимущество этой схемы заключается в том, что мощность может свободно протекать от сети к двигателю или от двигателя
к сети для рекуперативного привода постоянного тока. Недостатком является то, что на входе необходима установка фильтра, для обеспечения дополнительной индуктивности и фильтрации формы ШИМ, чтобы исключить негативное влияние на питающую
сеть.
Рис. 7. Схема матричного ЧРП
Кроме частотных преобразователей с трехуровневыми выходами и инверторами матричного типа существуют также и другие типы частотно-регулируемых приводов. Таким образом миф о том, что все частотные преобразователи одинаковые развеян.
Нередко можно увидеть, что производители частотных преобразователей заявляют значение коэффициента мощности, например, равным 0,98 или почти 1. Действительно коэффициент мощности несколько улучшается после установки ЧРП перед асинхронным двигателем. ЧРП
компенсирует реактивную мощность за счет конденсаторного звена. Однако полностью компенсировать фазовый сдвиг преобразователь частоты не может.
Полный коэффициент мощности должен включать реактивную мощность, вызываемую гармониками, создаваемыми в звене постоянного тока. Причиной является работа диодного моста. Важно помнить, что диод работает только тогда, когда напряжение на стороне
анода выше, чем напряжение на стороне катода (прямое смещение). Это означает, что диоды открыты только на пике каждой временной фазы как положительной, так и отрицательной частей синусоидальной волны. Это приводит к волнообразной
форме волны. Это также приводит к искажению входного тока и прерыванию (см. Рис. 8).
Рис. 7. Форма сигналов после выпрямителя
Чтобы вычислить истинный полный коэффициент мощности (PF), необходимо учесть эффекты гармоник. Следующее уравнение показывает, как гармоники влияют на полный коэффициент мощности:
где THD = суммарное гармоническое искажение
Для прерывистого сигнала входного тока в уравнении THD будет находиться в районе 100% или более. Подставляя это в уравнение, получаем истинный коэффициент мощности PF ближе к 0,71, по сравнению с заявленным 0,98, который
не учитывает гармоники.
Но не всё так плохо. В настоящее время существует множество способов гармонические искажения, создаваемые в звене постоянного тока. Они используют как пассивные, так и активные методы подавления искажений входного сигнала. Так,
например, вышеупомянутый матричный преобразователь частоты является примером активного метода подавления гармонических искажений.
Миф № 4: С частотным преобразователем Вы можете эксплуатировать двигатель на любой скорости.
Особенность применения частотных преобразователей заключается, что они могут изменять как напряжение, так и частоту выходного сигнала. Благодаря возможности обеспечения требуемой скорости вращения электродвигателя ЧРП нашли широкое применение во всех
сферах экономики и всех отраслях промышленности ЧРП может легко выдавать сигнал любой частоту в пределах предусмотренного изготовителем диапазона регулирования. Однако необходимо учитывать, что частотный преобразователь работает в составе
электродвигателя в реальных условиях. Технологические требования, такие как необходимый крутящий момент, охлаждение, требуемая мощность так или иначе ограничивают фактический диапазон регулирования преобразователя частоты.
Ограничение № 1. С точки зрения охлаждения электродвигателя, низкая скорость вращения — это не очень хорошая идея. В частности, полностью закрытые вентиляторные (TEFC) двигатели имеют охлаждаются только
за счет внутреннего вентилятора, который вращается вместе с валом двигателя. Чем медленнее скорость вращения двигатель, тем меньше поток воздуха и тем хуже охлаждение. Закрытые двигатели обычно не рекомендуются эксплуатировать
с частотой ниже 15 Гц (диапазон скоростей 4:1).
Ограничение № 2: Электродвигатели имеют определенные ограничения диапазона скоростей, связанные с механическими и динамическими ограничениями нагрузок вращающихся частей. Обычно эта скорость называется максимальной
безопасной частотой вращения. Данная характеристика не всегда указывается на шильдике мотора.
Ограничение № 3: При достижении максимальной частоты вращения крутящий момент двигателя может снижаться. Это ограничение скорости связано с ограничением мощности, которое включает в себя скорость вращения и крутящий
момент. Если быть еще точнее, что будет снижаться напряжения ЧРП. Обратите внимание, что вращение двигателя также генерирует собственное напряжение, называемое обратной электродвижущей силой (ЭДС), которое увеличивается со скоростью. Обратная
ЭДС создается двигателем, чтобы противостоять приложенному напряжению от ПЧ. На более высоких скоростях ПЧ должен подавать еще большее напряжения, чтобы преодолеть обратную ЭДС, и ток мог протекать по обмоткам двигателя, создавая
крутящий момент. После определенного максимального значения преобразователь частоты не может преодолеть обратную ЭДС электродвигателя, и, следовательно, крутящий момент двигателя уменьшается, что, в свою очередь, снижает скорость. Снижение
скорости опять приводит к более низкой обратной ЭДС, которая, в свою очередь, позволяет протекать току в двигатель снова. Существует точка равновесия, в которой двигатель достигает максимальной скорости при максимальном крутящем
моменте.
Как упоминалось выше ЧРП может создавать крутящий момент на двигателе, сохраняя постоянство отношения V/f (см. Рис. 9).
Рис. 9. График зависимости напряжения от частоты.
Когда частота выходного сигнала увеличивается, напряжение увеличивается линейно. Проблема возникает, когда частота превышает номинальную частоту двигателя. Помимо номинальной частоты, не может увеличиваться выходное напряжение, что соответственно
приводит к уменьшению отношения V / f. Отношение V / f является мерой напряженности магнитного поля в двигателе и влияет на его крутящий момент. Следовательно, способность мотора создавать номинальный крутящий момент
при частоте выше номинальной должна уменьшаться со скоростью 1 / частота, при этом произведение крутящего момента и частоты, равное мощности, является постоянным. Область работы над номинальной частотой называется постоянным диапазоном
мощности, а работа на скоростях ниже номинальной — диапазоном постоянного крутящего момента (см. Рис. 10).
Рис. 10. Графики зависимости мощности и крутящего момента электродвигателя от частоты.
Миф № 5: Входной ток преобразователя частоты выше выходного тока
Возможно, это не миф, а недоразумение. Некоторые пользователи ПЧ измеряют значение выходного и входного тока с помощью измерительного инструмента или с помощью мониторов ПЧ и обнаруживают, что входной ток намного
ниже выходного. Это похоже не согласуется с идеей о том, что частотный преобразователь должен иметь некоторые потери и поэтому вход всегда должен быть немного выше, чем выход. Концепция правильная, но она учитывает мощность,
а не ток, который следует учитывать:
Входное напряжение всегда находится под напряжением переменного тока. Выходное напряжение изменяется со скоростью по образцу V / f. На самом деле компоненты уравнения немного сложнее. Но ключом к пониманию данного процесса
является знание того, что асинхронный двигатель имеет два токовых компонента: один отвечает за создание магнитного поля в двигателе, которое необходимо для вращения двигателя; а второй — ток, создающий крутящий момент, который,
как следует из названия, отвечает за создание крутящего момента.
Привод потребляет входной ток, пропорциональный активному крутящему моменту двигателя. Ток, необходимый для создания магнитного поля, обычно не изменяется со скоростью и обеспечивается основными конденсаторами звена постоянного тока, которые
заряжаются при включении питания ПЧ. При малых значения крутящего момента выходной ток может быть намного выше, чем входной, поскольку входной ток отражает только составляющую, создающую крутящий момент плюс некоторые гармоники, но не включает
ток намагничивания. Ток намагничивания циркулирует между конденсаторами шины постоянного тока и двигателем. Даже при полной нагрузке входной ток обычно будет ниже, чем ток двигателя, поскольку на входе по-прежнему нет составляющей тока намагничивания.
Помните, что в уравнении мы сравниваем входную и выходную мощности. Например, рассмотрим полностью нагруженный двигатель, вращающийся на низких оборотах. Входное напряжение номинальное, а выходное напряжение будет низким из-за
низкой скорости вращения. Выходной ток в данном случае будет высокий из-за полной нагрузки на двигатель. А чтобы сбалансировать уравнение мощности, входной ток должен быть ниже выходного тока.
Узнать подробную информацию о частотных преобразователях, ознакомиться с производственной линейкой YASKAWA Вы можете у нашего партнера — ООО «КоСПа»
Или в соответствующем разделе преобразователя YASKAWA
Частотный преобразователь для асинхронного двигателя на AVR
Дата публикации: .
В этой статье описывается универсальный трехфазный преобразователь частоты на микроконтроллере(МК) ATmega 88/168/328P. ATmega берет на себя полный контроль над элементами управления, ЖК-дисплеем и генерацией трех фаз. Предполагалось, что проект будет работать на готовых платах, таких как Arduino 2009 или Uno, но это не было реализовано. В отличие от других решений, синусоида не вычисляется здесь, а выводится из таблицы. Это экономит ресурсы, объем памяти и позволяет МК обрабатывать и отслеживать все элементы управления. Расчеты с плавающей точкой в программе не производятся.
Частота и амплитуда выходных сигналов настраиваются с помощью 3 кнопок и могут быть сохранены в EEPROM памяти МК. Аналогичным образом обеспечивается внешнее управление через 2 аналоговых входа. Направление вращения двигателя определяется перемычкой или переключателем.
Регулируемая характеристика V/f позволяет адаптироваться ко многим моторам и другим потребителям. Также был задействован интегрированный ПИД-регулятор для аналоговых входов, параметры ПИД-регулятора могут быть сохранены в EEPROM. Время паузы между переключениями ключей (Dead-Time) можно изменить и сохранить.
Введение
Программное обеспечение, работа и компиляция
Генерация синуса
Скалярное(Вольт-частотное) управление (V/f)
Схема устройства
Выводы
В целом, программное обеспечение основано на документации Atmel AVR447, но было значительно изменено для использования описанного здесь контроллера. Аналогично, используется ЖК-библиотека Питера Флери, большое спасибо за это красивое программное обеспечение. К сожалению, программа не совсем вписывается в ATmega48 в текущем состоянии, но может работать с небольшой оптимизацией в строковых функциях. Чтобы избежать каких-либо вопросов – нет, код не работает в (устаревшей) ATMega8. Этот МК не имеет такого функционала таймеров и прерываний.
Характеристики:
Диапазон частот: 0,6 – 162 Гц; Выходное напряжение: 0 – 325 В постоянного тока, максимально существующее напряжение промежуточной цепи; Формы выходного сигнала: двугорбая синусоида или синус, выбираемые перед компиляцией.
Введение
Устройство оснащено стандартным ЖК-дисплеем HD44780 работающим в 4-битном режиме и тремя простыми (цифровыми) кнопками. При включении питания MК проверяет наличие перемычки, а затем переключается на внутренний или внешний режим управления. Печатная плата управления гальванически изолирована от выходного каскада двигателя. Для этой цели используются шесть оптронов HCPL3120. Эти оптроны обеспечивают сигналы управления для классического полумостового драйвера IR2110/2113, которые, в свою очередь, приводят в действие мощные ключи на MOSFET/IGBT. Данный выходной каскад следует понимать только как пример, конечно, другие конфигурации вполне возможны.
Используются три таймера ATmega и синхронизация OC (Output Compare) всех таймеров. Один из таймеров (Таймер 1) обеспечивает прерывание переполнения, которое используется для установки ступенчатой cкорости генерации синусоиды и для синхронной записи новых значения ШИМ во все таймеры. Исходный код также содержит подробные комментарии. Скорость шага прямо пропорциональна генерируемой частоте и задается пользователем. Подробнее об этом можно найти в разделе «Генерация синуса».
Для удобства пользователя МК вычисляет частоту в Герцах и отображает ее на дисплее. Аналогично, амплитуда выходного сигнала вычисляется по длительности импульса сигналов ШИМ и показана на дисплее в процентах от напряжения промежуточного контура. Поскольку трехфазные двигатели обычно управляются с характеристикой V/f, это также вычисляется до переполнения таймеров.
Вот фотографии прототипа. Управляющая часть была собрана на макетной плате 2,54 мм, силовая часть на макетной плате с шагом 5,08 мм. МК находится под ЖК-дисплеем. Справа изображен один из моих трехфазных двигателей. Этот двигатель мощностью 550 ватт и работал с 1969 года в моем насосе. Насос полностью заржавел и вышел из строя, но двигатель все еще прекрасно работает. Он был сделан Стефаном-Верке в Хамельне.
Программное обеспечение, работа и компиляция
Программное обеспечение сконструировано таким образом, что ШИМ генератор полностью работает в прерываниях. Основной цикл программы дополняет пользовательский интерйейс и управление ЖК-дисплеем. Всего есть два режима отображения:
Режим 1 – это нормальное меню, в котором кнопка 1 может использоваться для переключения между настройками V/f и настройкой частоты. Клавиши 2 и 3 уменьшают или увеличивают выбранное значение. Курсор на дисплее ниже редактируемого значения. Функция автоповтора с ускорением упрощает настройку.
Режим 2 – активируется одновременным нажатием кнопок 1 и 2. Это меню используется для установки значений ПИД-регулятора и Dead-Time, начальных значений для V/f и частоты и для их записи в EEPROM. Опять же, клавиша 1 переключается между параметрами, а клавиши 2 и 3 используются для настройки. Одновременное нажатие 1 и 2 сохраняет значения, одновременное нажатие 1 и 3 выходит из режима без сохранения, но сохраняет значения для V/f и частоты, которые в настоящее время установлены в меню режима 1.
При работе с внешним сигналом в режиме 1 отображаются значения, но их нельзя изменить, нажав кнопку. С другой стороны, режим 2 выбирается, а также работает с внешним управлением для настройки значений ПИД и Dead-Time. Прерывание инициируется аналого-цифровым преобразователем. Оно считывает значение АЦП и сохраняет его в глобальных переменных. Конструкция «switch-case» позволяет вам использовать больше каналов АЦП, если это необходимо. DIP-вариант ATMega88/168 не дает этой возможности, здесь используются не все каналы АЦП. Однако в версии QFP еще есть каналы АЦП 6 и 7, они могут использоваться.
Описанная здесь схема позволяет применять как частотные, так и V/f-значения в качестве аналоговых сигналов. Без внешних делителей напряжения на входе ожидается в пределах 0-5 В.
Библиотеку ЖК-дисплея пришлось слегка модифицировать, поскольку здесь используется два разных порта для данных и линий управления. Изменения в lcd.h должны применяться, поскольку аппаратные выходы ШИМ МК не могут быть изменены.
Кстати, за исключением ПИД-регулятора и ЖК-подпрограмм, все части программного обеспечения были объединены в один файл, чтобы дать компилятору наилучшую возможную оптимизацию. В качестве параметра оптимизации “-О” оправдал себя. Перед компиляцией не следует забывать вводить частоту использованного кристалла в Гц в настройках проекта. В Linux файл Makefile должен быть дополнен -DF_CPU 16000000, в AS4 в разделе «Настройки проекта -> Общие». Однако использование поставляемого * .aps в качестве шаблона проекта не требуется. Пакет программного обеспечения содержит все файлы для создания проекта с помощью AVR Studio 4.
Исходный код состоит из следующих файлов:
main.c, pid.c, lcd.c
и заголовочные файлы:
vfd.h, vfdtables.h, pid.h, lcd.h
Особое внимание заслуживает vfd.h. Здесь описаны все определения проекта. Если вы посмотрите main.c, вы найдете много констант, все они будут объявлены в vfd.h. Наиболее часто используемыми переменными являются скорость шага (inco), указатель на таблицу синусов (sinTableIncrement), амплитуду (amplitude) и отношение V/f (VperHz). Эти переменные хранятся непосредственно в регистрах для увеличения рабочей скорости. Вероятно, это было бы необязательно, но в качестве примера, использующего переменные прямого реестра, это может быть полезно и для других проектов. Другая переменная прямого регистра (fastFlags). Эта структура используется поразрядно, но здесь используются только 4 бита. Один бит для переключения между внешним и внутренним управлением, затем 2 бита для используемой формы сигнала (либо «неопределенный», либо «синус»), а затем еще один бит для желаемого направления вращения. Параметры отображения вычисляются с использованием целочисленной математики, так как числа с плавающей точкой следует избегать. Регулярное прерывание таймера вызывает процедуру «SpeedController» (после 200 переполнений таймера). Здесь, во внешнем режиме управления, вызывается ПИД-регулятор и вычисляются параметры отображения. Индикация ЖК-дисплея выполнена с использованием командного интерпретатора.
После сброса сначала инициализируются ЖК-дисплей и порты, и все предварительно назначеные переменные. За этим следует инициализация таймеров, прерываний, АЦП и ПИД-регулятора. После проверяется состояние перемычек и считывается EEPROM. Наконец, разрешается глобальное прерывание и, следовательно, начинается генерация частоты.
Во время процесса диагностические коды выводятся на ЖК-дисплей, чтобы сообщать о любых проблемах с «залипшими» клавишами или другими проблемами. В конце следует основной цикл, в котором запущен «командный интерпретатор» (execCommand).
Командный интерпретатор не делает ничего, кроме как сначала проверяет нажатые клавиши. Если он найдет одну или несколько нажатых клавиш, будет выполнена одна из функций. После этого ЖК-дисплей будет обновлен. Второй уровень команд делает это для расширенного меню, так как он работает одинаково. Все настройки гарантируют, что значения не могут быть «за пределом», так как это часто приводит к фатальным последствиям. Так, например, Невозможно переключить рабочую частоту от 0,1 Гц непосредственно до 162 Гц или установить “Dead-Time” в ноль.
Еще одно замечание по AVR Studio 4, последняя версия 4.19, чтобы избежать ошибок компиляции, вы должны использовать AVR Toolchain 3.3.1 – 1020, иначе вас будут беспокоить ошибки. В качестве альтернативы WinAVR подходит – например, версия 20100110.
Генерация синуса
Значения синусоид для трех фаз (U, V и W) сохранены в массиве, который находится в файле «vfdtables.h». Выходы фаз в настоящее время обозначаются L1, L2 и L3, а также R, S и T. Сгенерированная частота определяется тем, после скольких вызовов в ISR “TIMER1_CAPT” указатель увеличится в таблице. Если «inco», например “1”, указатель в таблице увеличивается после 255 проходов, а следующее значение таблицы загружается в таймеры. Так как таблица имеет длину 192, это приводит к выходной частоте 0,635 Гц, что является следствием частоты повторения ШИМ 31,25 кГц/256 = 8,192 мс * 192. Если «inco» 255, следующее значение таблицы уже загружается после 1/31,25 кГц = 32 мкс, и это приводит к выходной частоте 1/(32мкс * 192) = 162,7 Гц. Направление вращения изменяется путем замены значений для V и W перед загрузкой таймеров. Доступ к таблице и загрузка таймеров ШИМ выполняются в процедуре прерывания переполнения таймера 1. Таким образом, эта процедура представляет собой ядро генерации синуса.
Для работы полумостов требуется использование паузы “Dead-Time”, благодаря чему ни верхний, ни нижний ключи полумоста не могут быть включены одновременно. Без этой паузы происходило бы короткое замыкание, что ни в коем случае нельзя допустить. (Этот случай часто упоминается как «прострел»). Поскольку “Dead-Time” сильно зависит от используемых драйверов, пауза была сделана регулируемой. Процедура InsertDeadband вычисляет требуемое “Dead-Time” для каждого таймера перед записью значений ШИМ.
“Dead-Time” хранится в EEPROM. По соображениям безопасности используется минимальное значение вместо недопустимого, если есть ошибки чтения EEPROM или установлено слишком малое значение. Слишком большое значение “Dead-Time” не вредно, но ограничивает диапазон использования ШИМ и эффективность привода. Разумеется, при первоначальном запуске рекомендуется установить большое значение “Dead-Time”, а затем уменьшить его при соблюдении текущего потребления. Единица “Dead-Time” (DEAD_TIME_HALF), отображаемая на дисплее, представляет собой время одного цикла МК. Полученное “Dead-Time” на полумосте в два раза выше, чем цикл МК. В показанном примере было использовано значение 20, что привело к значению “Dead-Time” (2*20*62,5 нс = 2500 нс). Для быстрых MOSFET или IGBT это значение может быть уменьшено. Потребление тока можно измерить на шунте R7. Внимание: эта часть не отделена от сети гальванически и с ней следует обращаться с осторожностью. Прямое соединение между GNDI и PE неизбежно приводит к повреждению элементов при подаче питания.
Форма сигнала фаз адаптирована к работе двигателей в приведенной таблице. Другие формы сигнала могут быть сформированы путем замены значений таблицы. Опция «#define PURE_SINE_DRIVE» теперь находится в vfd.h. В этом случае генерируются 3 стандартные синусоиды с фазовым сдвигом на 120° без типичных двугорбых синусоид для BLDC. Если МК работает с частотой, отличной от 16 МГц, параметр «DIVISIONEER» в файле «vfd.h» также должен быть изменен так, чтобы дисплей работал правильно. Если вам нужен только источник переменного тока, вы должны заменить таблицу на реальные значения синуса (как указано в обновлении) и создать только два выходных каскада. Между двумя выходами преобразователя будет регулируемый потенциал переменного тока.
При вращении двигателя с полной скоростью не следует изменять направление вращения на противоположное. В любом случае рекомендуется остановить двигатель, а затем изменить направление вращения.
Скалярное(Вольт-частотное) управление (V/f)
Скалярное управление является наиболее часто используемым методом для преобразователей частоты. При скалярном методе управления, скорость асинхронного электродвигателя контролируется установкой величины напряжения и частоты статора, таким образом, чтобы магнитное поле в зазоре поддерживалось на нужной величине. Для поддержания постоянного магнитного поля в зазоре, отношение В/Гц должно быть постоянным на разных скоростях. На низких оборотах необходимо компенсировать падение напряжения на сопротивлении статора, поэтому отношение В/Гц на низких оборотах устанавливают выше чем номинальное значение. Скалярный метод управления наиболее широко используется для управления асинхронными электродвигателями.
Характеристика «Вольт/частота» означает, что двигатель работающий на 100% частоте может работать с полным номинальным напряжением, но с понижением частоты также должно быть отрегулировано рабочее напряжение. Например на двигатель работающий на 50% от номинальной частоты не должно подаваться более 50% рабочего напряжения и т. Д. Точные значения различны и поэтому должны быть взяты из документации на двигатель или определены путем проб и ошибок.
Индикация обеспечивает достигнутый крутящий момент («мощность») двигателя. Он должен быть не больше, чем может обеспечить двигатель. Громкий шум, например, знак слишком большого напряжения, отношение V/f должно быть меньше. Тем не менее, часто достаточно предоставить двигателю 100% рабочее напряжение при номинальной частоте (например, 50 Гц), а на пониженной частоте МК также пропорционально уменьшит среднее напряжение на обмотках двигателя.
Схема устройства
В схеме не используются какие-либо специальные компоненты. 5-вольтовый DC-DC преобразователь используется от зарядки мобильного телефона, а в случае 18-Вольтового преобразователя был использован небольшой источник питания для светодиодных светильников, где путем изменениея номиналов компонентов было увеличено напряжение с 12 до 18 Вольт. Требуемый ток зависит от выбранной микросхемы драйвера полумоста и ключей, находится в пределах около 150 мА для всех трех каналов. Как всегда, хорошая гальваническая развязка максимально важна для компонентов драйвера. Импульсы в нагрузке, вызванные переключением затворов, должны сглаживаться конденсаторами, как показано на схеме. 5-вольтовая часть питания потребляет около 40-80 мА без подсветки ЖК-дисплея, а львиная доля идет на светодиоды оптопар. Импульсные источники питания (например, зарядное от мобильного телефона) питаются от сети переменного тока. Так как в схеме имеется диодный мост B1, можно удалить внутренние диодные мосты этих источников питания и подключится уже к сети постоянного тока V+.
Известно, что частотные преобразователи генерируют высокочастотные импульсы поэтому необходимо исключить попадание их в бытовую сеть.Также желательно, чтобы более длинные провода от выхода преобразователя до потребителя были экранировны, либо проходили через фильтр непосредственно на выходе преобразователя. Частота ШИМ составляет около 31 кГц и имеет крутые фронты, поэтому необходимо уделить не мало внимания для подавления этих помех. Конденсаторы C15 – C18 должны быть класса X2, причем C17/C18 типа Y. Подходящими являются специально предназначенные конденсаторы для подавления помех, если они имеют необходимый диэлектрический запас прочности. Как видно на рисунке, я использовал готовый сетевой фильтр с разъемом для шнура питания. Шунт R7 (шунт) должен выдерживать рабочий ток двигателя, я использовал 5-ваттный керамический резистор. Высокий пусковой ток, когда конденсатор постоянного тока не заряжен, ограничен R11, высокоамперный NTC, который также распространен в блоках питания ПК. здесь хорошо подходит тип 644, например, Philips.
Кстати, 18 Вольт используются только потому, что доступные мне в данный момент оптопары типа 3120 требуют напряжения питания не менее 16 вольт. Если бы у меня были оптопары типа HCPL3180, 12 Вольт было бы достаточно.
Показанный на схеме выходной каскад (показана только одна фаза, две другие идентичны) имеет встроенную токовую защиту, реализованную на шунте R7 и транзисторах T1 и T2. Если ток потребления слишком высок (около 2 А), T1 открывается и включает T2. Высокий уровень на коллекторе T2 активирует вход отключения микросхемы драйвера. Дросселя L4 и L3 должны быть сильноточными, имеющими запас по максимальному току двигателя.
Конденсаторы, подключенные параллельно кнопкам, предотвращают поступление помех от соседних линий LCD и PWM и обеспечивают минимальный ток на кнопках. Кнопки циклически опрашиваются командный интерпретатором и, следовательно, не требуют отдельной функции антидребезга.
Рядом с ISP разъемом имеется дополнительный разъем SV1. К его контактам могут быть подключены два аналоговых сигнала (контакты 6 и 8). Контакт 6 (5 канал АЦП) управляет отношением V/f, сигнал управления частотой подается на контакт 8 (4 канал АЦП). Контакт 4 переключает между внешним (АЦП) и внутренним (кнопка и ЖК-дисплей) управлением. Когда контакт замкнут на землю, система переключается на внешнее управление. Контакт 2 используется для изменения направления вращения двигателя.
Важным замечанием является различие между GND и GNDI: GND – это часть питания управляющей электроники, отделенная от сети, в то время как GNDI подключается напрямую к сети. Ни при каких обстоятельствах нельзя соединять GND и GNDI! Наоборот, в любом случае следует соблюдать достаточные безопасные расстояния. Поэтому в моем прототипе плата управления и питания полностью отделены друг от друга и соединены только платой оптопар.
Выводы
Из-за простоты управляющей части и использования стандартных компонентов представленный преобразователь частоты является достойным проектом, чтобы продемонстрировать возможности современных микроконтроллеров и поэкспериментировать с управлением двигателями. В зависимости от используемого выходного каскада возможно управлять другими типами двигателей, например, от электромобилей, жестких дисков, зеркальных головок лазерных принтеров. Изменение частоты ШИМ, производится в подпрограмме TimersInit(). Другие настройки прескалера для всех 3-х таймеров могут изменены с помощью битов «CSx1», в настоящее время установленных на 0. Конечно, MК также может работать с внутренним генератором 8 МГц. Это дает еще два свободных контакта порта, например, для осуществления обратной связи по току или контроль скорости.
Внешнее управление аналоговыми входами позволяет использовать привода серводвигателей, таких как “Capstan” и, например этими средствами стабилизировать PLL. Встроенный ПИД-регулятор с регулируемыми параметрами позволяет адаптировать его к широкому кругу задач. В любом случае мне интересно, что читатель может подумать о дополнениях, и я с нетерпением жду предложений и идей. Еще одно замечание: стоит сравнить цены различных возможных контроллеров. Зачастую «большой» ATmega328 теперь дешевле купить, чем его младших братьев. Если используется другой контроллер (Mega88, 168 и 328 все совместимы друг с другом), это следует учитывать в настройках проекта.
Автор: Matthias S
Файлы к статье “Частотный преобразователь для асинхронного двигателя на AVR”
Описание:
Исходный код(Си), схема Eagle
Размер файла: 202.16 KB Количество загрузок:
962
Скачать
radioparty.ru
Преобразователи частоты для асинхронных двигателей
До появления частотных преобразователей на рынке современной энергетики, электромонтёрам приходилось применять для подключения асинхронного двигателя стартовый или фазосдвигающий конденсатор большой ёмкости.
Двигатель при этом работал, но существенно терял мощность. Также, применение конденсаторов сильно разогревало обмотки двигателя, что сильно снижало его ресурс работы, и двигатели часто приходилось «перематывать». Учитывая, что обмотки асинхронного двигателя делаются из медной проволоки, то такие ремонты приносили большой ущерб.
Так как асинхронный двигатель является составной частью почти каждого современного привода, то вопрос создания частотного регулирования вставал на особый уровень. И вот, частотники уже повсеместно применяются для подключения электрического двигателя к сети и его управление.
По сути, частотный инвертор, это прибор, изменяющий частоту поданного на обмотки напряжения с ШИМ-регулированием. Благодаря частотнику, получилось подключить асинхронный двигатель к сети без ущерба его ресурсу, без перегрева, и ещё дать массу возможностей по управлению скоростью вращения вала.
Также, применяя различные интерфейсы передачи данных и команд, применение частотников позволило объединить все приводы большого предприятия в одно диспетчерскую систему управления и контроля параметров.
В мир современной автоматизации технологических процессов, это весомый аргумент.
Устройство частотных преобразователей
Современный частотный инвертер состоит из двух принципиальных блоков. Первый блок полностью сглаживает напряжение и на выходе выдаёт постоянное. Постоянное напряжение подаётся на силовой блок генерации частоты. После преобразования, на выходе из второго блока частота напряжения уже будет такая, какая задана настройкой.
За возможность изменять частоту напряжения отвечает микропроцессор, который встроен в частотник. Используя заданную программу, процессор следит за выходной частотой напряжения, а также за параметрами работы электрического двигателя.
По сути, частотные преобразователи для асинхронных двигателей принцип работы которых заключён в простом вырабатывании нужной частоты переменного тока, это модуляторы нужной природы напряжения, которая необходима для того или иного оборудования. Именно это и снизило негативное влияние на работу электрического двигателя, которое имело место быть при использовании конденсатов.
Электрический двигатель получает именно такое напряжение, которое положено ему для нормальной и полноценной работы.
Считаем нужным отметить, что и при наличии линии трёхфазного напряжения, не всегда рационально подключать электрический двигатель к сети просто через выключатель. В таком случае, двигатель будет работать, но регулировать его работу не получится. Не получится и следить за состоянием обмоток.
В промышленном исполнении можно встретить два основных типа частотных преобразователей:
Специальные.
Универсальные.
Специальный частотный преобразователь для асинхронного двигателя, схема которого несколько отличается от универсального, изготавливается под конкретное оборудование по конкретным потребностям. Как правило, это очень урезанные версии, не способные на работу с любым оборудованием.
Универсальные частотные инвертера могут работать, как и в специальном оборудовании, так и во всех остальных вариантах применения. На то они и универсальные, что их можно настраивать и программировать под любые нужды.
Поэтому, выбор частотного преобразователя для асинхронного двигателя должен быть не столько продиктован конкретными необходимостями производства, но и возможностью модернизации оборудования.
Практически во всех частотниках сегодня реализована возможность установки и контроля режима работы электрического двигателя с пульта управления. Первый интерфейс управления встроен в сам корпус частотника. Там же есть и ручка регулирования скорости вращения двигателя.
Но можно и применять выносные пульты управления. Которые можно располагать как в диспетчерской, так и непосредственно на станке, который приводится в движение электрическим двигателем. Такое чаще встречается в ситуациях, когда станок с двигателем находится в помещении, где не рекомендуется установка частотного инвертора. И его устанавливают вдали от оборудования.
Большая часть инвертеров частоты позволяют программировать работу оборудования. Но, задать программу просто с пульта управления не получится. Для этого используется интерфейс передачи данных и настройки, который, при помощи компьютера позволяет задать нужную программу работы.
Разница типов сигналов управления
При проектировании цеха очень важно учитывать, что общение частотных преобразователей с диспетчерским пультом будет происходить при помощи электрических импульсов по проводам связи. Пи этом, не стоит забывать, что разные стандарты связи по-разному влияют друг на друга. Посему, переда данных одним способом, может существенно снижать качество передачи данных другим способом. Поэтому, расчет частотного преобразователя для асинхронного двигателя должен производиться не только по его электротехническим показателям, но и по показателям совместимости с сетью.
Выбор мощности частотного преобразователя
Вопрос мощности частотника, скорее всего, стоит на первом плане, при расчете привода для любого станка или агрегата. Дело в том, что большинство частотных инвертеров способны выдерживать большие перегрузки до 200 – 300 %. Но, это совсем не означает, что для питания электрического двигателя можно смело покупать частотник сегментом ниже, чем требуется по планированию.
Выбор мощности частотного преобразователя осуществляется с обязательным запасом в 20 – 30%. Игнорирование этого правила может повлечь за собой выход из строя частотного преобразователя и простой оборудования.
Также важно учитывать пиковые нагрузки, которые может выдерживать частотник. Дело в том, что при старте электрического двигателя его пусковые токи могут сильно превышать номинальные. В некоторых случаях, пусковой ток превышает номинальный в шесть раз! Частотик должен быть рассчитан на такие изменения.
Каждый электрический двигатель оборудован вентилятором охлаждения. Это лопасти, которые установлены в задней части двигателя и по мере вращения вала прогоняют через корпус мотора воздух.
Если электрический двигатель работает на пониженных оборотах, то мощности потока воздуха может не хватить для охлаждения.
В этом случае, нужно выбирать частотник с датчиками температуры двигателя. Или организовать дополнительное охлаждение.
При расчёте и подключении частотника к сети и электрическому двигателю, следует помнить, что он очень подвержен помехам. Также, преобразователь частоты может и сам стать источником помех для другого оборудования. Именно поэтому, все подключения к частотнику и от него выполняются экранированными кабелями и выдерживанием дистанции в 10 см друг от друга.
По своей сути, применение частного преобразователя для питания асинхронного электрического двигателя позволило существенно продлить жизнь электрического двигателя, дало возможность регулировать работу двигателя и хорошо экономить на расходе электрической энергии.
Частотник, частотный преобразователь1ф 220 — 3ф220 для асинхронного электродвигателя
Модифицированная синусоида, что это, как сделать чистый синус после инвертора?
Как получить чистую синусоиду из модифицированной. Часть 1
Однако в этих мытарствах были и положительные элементы. Например, резко возрос спрос на разные бензо- и дизель-генераторы, а также на электронные преобразователи и бесперебойные источники тока. Последнее обстоятельство позволило людям творческим применить свои профессиональные навыки и даже немного улучшить на этом поприще свое финансовое положение. А там, глядишь, появились различные фирмочки, выпускающие эти самые преобразователи и бесперебойники. Какой-никакой подъем в экономике образовался, дополнительные рабочие места и т. п. Собственно, и Ваш покорный слуга, примерно в те времена, из электроники слабосильной подался в электронику силовую.
Нельзя сказать, что тогда с этой самой электроникой сильно мудрили. Делали, чтобы было просто, надежно и дешево. В принципе, для того чтобы питать одну-две лампочки, больше ничего и не требовалось. Однако по мере развития процесса конкуренция ужесточалась. Народу уже стало из чего выбирать. Особо привередливые начали интересоваться формой напряжения на выходе преобразователей и бесперебойников. На что им очень обтекаемо отвечали, что форма там практически синусоидальная, но лишь слегка модифицированная. Более честные говорили, что там присутствует синусоида, но только квадратная. А уж совсем честные говорили напрямую, что их преобразователи и бесперебойники формируют на выходе прямоугольное напряжение с паузой. Но параметры этого напряжения (амплитудное и действующее значение, а также частота) практически соответствуют аналогичным параметрам однофазного переменного напряжения бытовой электросети. В принципе, такое напряжение вполне подходило для основных бытовых электропотребителей, таких телевизоры, компьютеры, а также накальные и люминесцентные лампы. Те же электропотребители, которые требовали чисто синусоидального напряжения (асинхронные двигатели, например), были в меньшинстве и погоды особой не делали.
Однако такое положение не могло длиться вечно. Количество отключений сокращалось и в какой-то момент они практически вообще прекратились. Однако параллельно на рынке бытовых товаров стали появляться отопительные котлы, оборудованные циркуляционными насосами, приводными задвижками и электронным управлением. Такие котлы требовали высококачественного бесперебойного электропитания. В противном случае, при отключении электричества работа системы отопления полностью нарушалась.
И вот тут возникала некая дилемма. Многие владельцы отопительного чуда уже обладали бесперебойными источниками, мощности которых с лихвой хватало для питания котла. Однако, вот беда, циркуляционные насосы ни в какую не хотели крутиться от «прямоугольной синусоиды». Для чудо-котла надо было приобретать новый чудо-бесперебойный источник, формирующий на выходе чистейшую синусоиду. А куда же теперь девать старый, к которому уже душой прикипели. Нехорошо как-то все это!
Но положение не безвыходное и старый друг нам еще послужит! Для питания асинхронного двигателя от прямоугольного напряжения можно использовать фильтр Отто. Есть множество положительных примеров практического воплощения такого подхода. Однако такой вариант не самый простой и, уж точно, не универсальный. После продолжительной и утомительной настройки фильтр можно будет использовать только с конкретным двигателем. Хотелось бы чего-то более универсального. Таким более универсальным решением будет использование в качестве фильтра феррорезонансного или подобного ему стабилизатора. При этом феррорезонансный стабилизатор, включенный после бесперебойного источника, будет не только исправлять форму его выходного напряжения в периоды отсутствия сети (работа от аккумулятора), но и будет стабилизировать напряжение сети в моменты его присутствия.
Ниже приводится описание и принципиальная электрическая схема феррорезонансного стабилизатора мощностью 1000 Вт. В статье приведены формулы и методика расчета, которая позволит вам пересчитать стабилизатор на другую мощность, если это потребуется.
Феррорезонансный стабилизатор
Феррорезонансные стабилизаторы имеют ряд достоинств, таких как высокая надежность и быстродействие, широкий диапазон входных напряжений, хорошая стабильность выходного напряжения, способность к исправлению формы сильно искаженного входного напряжения. Однако, не смотря на все свои достоинства, эти стабилизаторы имеют и некоторые недостатки, к которым можно отнести относительно низкую удельную мощность и высокий уровень шумов, создаваемых при работе.
Не так давно, в 60-80-х годах прошлого века, феррорезонансные стабилизаторы широко использовались в быту для питания ламповых телевизоров. И старшее поколение читателей, скорей всего, до сих пор помнит тот надрывный гул, которым сопровождалась работа этих аппаратов, которые различались формой и расцветкой, но имели вес 10-15 кг при мощности 250-350 Вт.
Основным источником шумов в феррорезонансном стабилизаторе является насыщающийся дроссель. В работе сердечник этого дросселя постоянно насыщается, что приводит к изменению его линейных размеров. Это явление называется магнитострикционным эффектом. О «шумности» этого эффекта говорит хотя бы тот факт, что он широко используется в гидроакустике для генерации мощных акустических волн. Следовательно, если мы хотим построить тихий стабилизатор, то в первую очередь должны избавиться от насыщающегося дросселя. Однако нельзя просто так выбрасывать неугодные комплектующие из стабилизатора. В этом случае мы рискуем потерять его функциональность. Чтобы этого не произошло, сначала нужно найти достойную замену. И на нашу удачу такая достоянная замена имеется. Еще в 70-х годах прошлого столетия была доказана возможность замены насыщающегося дросселя последовательной цепочкой, состоящей из линейного дросселя и двух встречно-параллельных тиристоров . Такая цепь ведет себя аналогично насыщающемуся дросселю, но в отличие от него имеет меньшие размеры и массу, может оперативно регулироваться за счет управления тиристорами, обеспечивает меньшие потери и, самое главное, гораздо меньше шумит. В технической литературе такая цепочка зачастую называется резонансным тиристорным регулятором (РТР) . При необходимости, два встречно-параллельных тиристора РТР можно с успехом заменить одним симистором.
Работа стабилизатора
Функциональная схема стабилизатора с РТР изображена на Рисунке 1.
Рисунок 1.
Функциональная схема стабилизатора с РТР.
Стабилизатор с РТР имеет практически тот же принцип действия, что и феррорезонансный стабилизатор. Выходное напряжение UН поддерживается на требуемом уровне (220 В). Когда напряжение питающей сети UС имеет минимальное значение, симистор VS1 заперт. При этом напряжение UН поднимается до требуемого уровня за счет резонанса в колебательном контуре L1C1. Если же напряжение питающей сети UС имеет максимально допустимое значение, то симистор VS1 постоянно открыт. При этом дроссели L1 и L2 образуют делитель переменного напряжения, уменьшающий сетевое напряжение до требуемого уровня. В феррорезонансном стабилизаторе насыщающийся дроссель также максимально используется при максимальном входном напряжении, и минимально при минимальном. Дроссель L3 совместно с конденсатором С1 образует фильтр третьей гармоники, улучшающий форму выходного напряжения стабилизатора.
Рисунок 2.
Осциллограммы основных напряжений и токов стабилизатора с РТР.
Рассмотрим подробнее работу стабилизатора с РТР. На Рисунке 2 изображены осциллограммы основных напряжений и токов стабилизатора с РТР. Выходное напряжение стабилизатора UН выпрямляется при помощи выпрямителя В2. Выпрямленное напряжение UВ2 поступает на фильтр Ф, который выделяет из него среднее, действующее или амплитудное значение, в зависимости от того, какое значение выходного напряжения UН требуется стабилизировать. Далее напряжение с выхода фильтра поступает на сумматор, где сравнивается с опорным напряжением UОП. С выхода сумматора напряжение ошибки поступает на регулятор Рег, который формирует управляющий сигнал, призванный компенсировать отклонение выходного напряжения стабилизатора. Выходное напряжение регулятора UПОР поступает на вход порогового устройства ПУ и определяет его порог срабатывания. На другой вход порогового устройства подается синхронизирующее напряжение UВ1, привязанное к моментам перехода через ноль выходного напряжения UН стабилизатора.
На выходе порогового устройства ПУ формируются импульсы управления UУПР, которые усиливаются усилителем мощности УМ и в требуемой полярности поступают на управляющий электрод симистора VS1. Синхронизирующее напряжение создается при помощи интегратора Инт и выпрямителя В1. Благодаря интегратору, импульсы выпрямленного напряжения UВ1 отстают от импульсов UВ2 на 5 мс (фазовый сдвиг –90°).
Импульсы управления UУПР формируются на нарастающем фронте UВ1 между нулевым и амплитудным значением этого напряжения. При увеличении порогового напряжения UПОР импульсы управления максимально сдвигаются к амплитудному значению UВ1 и, соответственно, к нулевому значению UВ2. В этом случае симистор открывается в районе нулевого значения UН и через линейный дроссель L2 протекает незначительный ток IL2, который не оказывает существенного влияния на выходное напряжение стабилизатора. При уменьшении порогового напряжения Uпор импульс управления сдвигается в сторону амплитудного значения UН и через линейный дроссель L2 начинает протекать существенный ток, который шунтирует выход стабилизатора и уменьшает величину его выходного напряжения.
Если выходное напряжение стабилизатора меньше требуемого, то регулятор Рег увеличивает пороговое напряжение UПОР. В результате ток, протекающий через дроссель L2, уменьшается, и выходное напряжение стабилизатора возрастает за счет резонанса в колебательном контуре L1C1. Если выходное напряжение больше требуемого, то регулятор Рег уменьшает пороговое напряжение UПОР. В результате ток, протекающий через дроссель L2, увеличивается и выходное напряжение стабилизатора уменьшается.
Расчет силовой схемы стабилизатора
Рассмотрим практическую методику расчета стабилизатора мощностью 1000 ВА. Такой стабилизатор может использоваться как независимое устройство или совместно с устаревшими источниками бесперебойного питания для получения синусоидальной формы напряжения.
Принципиальная электрическая схема силовых цепей стабилизатора с РТР мощностью SН = 1000 ВА изображена на Рисунке 3. Стабилизатор рассчитан на работу от сети переменного тока 220 В 50 Гц c нагрузкой, имеющей коэффициент мощности cos φН ≥ 0. 7, и формирует выходное напряжение UН = 220 В ±1% во всем диапазоне нагрузок при изменении входного напряжения от 150 до 260 В.
Рисунок 3.
Принципиальная электрическая схема силовых цепей стабилизатора с РТР мощностью 1000 ВА.
Первым делом необходимо определить емкость резонансного конденсатора. Реактивную мощность резонансного конденсатора для стабилизатора без фильтра третьей гармоники можно найти по формуле:
где:
– угловая частота сетевого напряжения, рад/с.
Зная реактивную мощность резонансного конденсатора, найдем его емкость:
Найдем индуктивность линейного дросселя L1:
Найдем индуктивность линейного дросселя L2:
Найдем индуктивность линейного дросселя L3:
Так как в стабилизаторе для улучшения формы выходного напряжения установлен фильтр третьей гармоники, емкость резонансного конденсатора можно уменьшить:
В качестве C1 можно использовать компенсирующие конденсаторы типа К78-99 или аналогичные, предназначенные для коррекции коэффициента мощности электромагнитных дросселей газоразрядных ламп. Например, можно использовать два включенных параллельно конденсатора К78-99 емкостью 50 мкФ, рассчитанных на напряжение 250 В переменного тока. Для этой же цели можно использовать конденсатор типа МБГВ 100 мкФ на напряжение 1000 В.
Окончание
Схема
Инверторы данного типа могут устанавливаться для преобразования напряжения в сетях, в которых имеются аккумуляторные батареи служащие накопителями электрической энергии, а также в прочих электрических сетях, когда форма напряжения (выходного сигнала) не соответствует требуемой конфигурации.
Ниже приведена принципиальная схема инвертора типа «чистый синус» в которой учтены разные варианты использования.
Фильтр «Ф» и диодный мост «М» работают, когда инвертор улучшает качество напряжения и не требуются — при подключении прибора к аккумуляторам.
При работе с накопителями энергии (аккумуляторными батареями), выпрямление напряжения осуществляет диодный мост М1.
Генератор, задающий сигнал напряжением 220 В частотой 50 Гц, построен на основе микросхемы D5, а контроллеры D1, D2 формируют сигнал синусоидальной формы.
С контроллеров, выходной сигнал поступает на микросхемы D3, D4, где формируется сигнал управления транзисторами.
Силовая схема построена по мостовому принципу. Нагрузка подключается в одно плечо диодного моста, питающее напряжение – в другое.
Защита по тока собрана на резисторах R17-19, R22 и диодах VD11,12.
Где купить
Инвертор — это прибор, который не относится к товарам повседневного спроса, поэтому его нельзя приобрести в простом магазине или супермаркете. Реализацией подобных изделий занимаются специализированные организации и торговые сети, ориентированные на альтернативные виды энергии, используемые для автономного электроснабжения объектов различных типов.
Если у потребителя уже установлена солнечная электростанция или ветровой генератор, то лучше всего приобрести модель того производителя, оборудование которого уже используется. Для этого необходимо найти дилера этой компании и заключить с ним договор поставки.
Если создается новая система автономного электроснабжения и пользователь самостоятельно выполняет ее комплектацию, то можно пойти несколькими путями, это:
Опять же найти дилера компании, производящей подобные устройства и приобрести товар у него.
Обратиться в торговую компанию, реализующую приборы из этой группы товаров.
Поискать необходимое устройство в сети интернет, где представлен достаточно широкий ассортимент подобных устройств.
Как сделать своими руками
При желании изготовить инвертор типа «чистый синус» своими руками, необходимо помнить, что это достаточно сложное электронное устройство. При самостоятельном изготовлении необходимо не только уметь работать с паяльником, а также нужно знать, как правильно монтировать микросхемы и прочие электронные комплектующие. Уметь работать с электронными приборами, с помощью которых можно отслеживать форму выходного сигнала, а также подстраивать элементы схемы, обеспечивающие соответствие формы и силы выходного сигнала, предъявляемым требованиям.
Ниже, приведена одна из схем, используя которую, можно самостоятельно собрать подобный прибор. Это достаточно простая схема, но тем не менее, она широко используется и промышленными производителями таких устройств.
В качестве генератора сигналов используется микросхема КР1211ЕУ1, а в качестве ключей — транзисторы IRL2505. Повышающий трансформатор повышает напряжение на выходе до 220 вольт, а снижение высокочастотных помех осуществляет конденсатор.
Мощность устройства, собранного по этой схеме – до 0,5 кВт, в зависимости от мощности трансформатора.
Ступенчатая аппроксимация синусоиды при работе от аккумуляторов, ИБП синус
ИБП с чистым синусом
Когда ИБП с аппроксимированной синусоидой применять нельзя?
Для устройств со значительной реактивной составляющей расходуемой мощности, индуктивной нагрузкой и для помеховосприимчивых приборов подойдёт только чистый сигнал. К таким устройствам относятся асинхронные двигатели и оборудование, содержащее их – насосы, отопительные котлы, трансформаторы и старая электроника с трансформаторными блоками питания. ИБП с модифицированной синусоидой генерируют помехи, дают низкий эффективный ток (среднее напряжение), превышение силы потребляемого тока.
На практике это означает, в лучшем случае, невозможность включения оборудования, в худших вариантах – нехватку мощности при возрастающей силе тока, перегрев, быстрый выход приборов из строя или значительное уменьшение жизненного цикла. У лучших линейно-интерактивных ИБП коэффициент искажений не превышает 3–5%, у источников с двойным преобразованием синусоида чистая – сигнал формируется инвертором заново.
В каталоге интернет-магазина 220 Volt имеются сотни моделей ИБП оффлайн, интерактивного и онлайн типов в широчайшем ценовом разнообразии. Если вы сомневаетесь в том, какой ИБП купить, – специалисты магазина ответят на все вопросы и помогут в выборе бесперебойника и другой электротехники.
Блог › Самодельный инвертор 12-220 вольт с чистым синусом
Напрягает ситуация когда отключают свет, я живу в частном доме и воду добываю с помощью погружного вибрационного насоса, не то чтобы часто отключают, но пару раз без воды оставался, неприятно. Так вот, что бы исключить повторения такой ситуации в будущем, решил собирать инвертор, решался честно долго, не мог подобрать оптимальный вариант получения синуса, мучить насос модифицированной синусоидой не стал, и вот как то наткнулся на специальный модуль под названием EGS002. Модуль представляет из себя плату, на которой расположена микросхема eg8010, этот контроллер заточен для получения синуса, и пары драйверов.
Для получения синуса одной платки конечно мало, самое главное нам потребуется преобразователь напряжения с 12 до 350 вольт ватт на 300, четыре полевых транзистора для коммутации постоянного напряжения (350в) и выходной фильтр, для превращения прямоугольных импульсов разной длительность в синусоиду. На схеме все что выделено слева, это сам модуль, а то что с права это то что нам нужно прикрутить.
Первая версия печатной платы была испытана Николаем Шумиловым на радиоскоте.
Все заработало практически с первого раза, форму сигнала на выходе было нечем посмотреть, работало все исправно, но только на лампочках, стоило подключить индукционную нагрузку и через некоторое время броском напряжения вышибло выходные ключи, так как я допустил фатальную ошибку, не предусмотрел места на печатке для снабберов. А это уже исправленная версия платы, со всем необходимым для нормальной работы инвертора. Прилагаю пока только скрины печатки, те кто ждал готовое устройство, уж простите) работаю сейчас над плазморезом) за инвертор возьмусь после.
Как получить чистую синусоиду из модифицированной. Часть 1
Журнал РАДИОЛОЦМАН, ноябрь 2013
Валентин Володин
Вступление
Еще не стерлись из памяти события «лихих» 90-х. Помнится МММ, разгул криминала, веерные отключения электроэнергии. На Украине, например, во второй половине 90-х дело доходило до того, что свет в жилых районах выключали на 2 часа через каждые 2 часа. Помнится, наиболее коварным был зимний период темноты между пятью и семью часами вечера. Как раз, когда народ возвращался с работы. Выгружаешься на остановке, автобус уезжает, и ты остаешься в полной темноте. Пытаешься привыкнуть, трешь глаза, давишь на глазные яблоки. Все безрезультатно, вокруг полная темнота. Делать нечего, осторожно ступаешь во мраке, пытаясь нащупать заветный забор, который должен вывести к родной калитке и потихоньку, на ощупь, домой.
Однако в этих мытарствах были и положительные элементы. Например, резко возрос спрос на разные бензо- и дизель-генераторы, а также на электронные преобразователи и бесперебойные источники тока. Последнее обстоятельство позволило людям творческим применить свои профессиональные навыки и даже немного улучшить на этом поприще свое финансовое положение. А там, глядишь, появились различные фирмочки, выпускающие эти самые преобразователи и бесперебойники. Какой-никакой подъем в экономике образовался, дополнительные рабочие места и т. п. Собственно, и Ваш покорный слуга, примерно в те времена, из электроники слабосильной подался в электронику силовую.
Нельзя сказать, что тогда с этой самой электроникой сильно мудрили. Делали, чтобы было просто, надежно и дешево. В принципе, для того чтобы питать одну-две лампочки, больше ничего и не требовалось. Однако по мере развития процесса конкуренция ужесточалась. Народу уже стало из чего выбирать. Особо привередливые начали интересоваться формой напряжения на выходе преобразователей и бесперебойников. На что им очень обтекаемо отвечали, что форма там практически синусоидальная, но лишь слегка модифицированная. Более честные говорили, что там присутствует синусоида, но только квадратная. А уж совсем честные говорили напрямую, что их преобразователи и бесперебойники формируют на выходе прямоугольное напряжение с паузой. Но параметры этого напряжения (амплитудное и действующее значение, а также частота) практически соответствуют аналогичным параметрам однофазного переменного напряжения бытовой электросети. В принципе, такое напряжение вполне подходило для основных бытовых электропотребителей, таких телевизоры, компьютеры, а также накальные и люминесцентные лампы. Те же электропотребители, которые требовали чисто синусоидального напряжения (асинхронные двигатели, например), были в меньшинстве и погоды особой не делали.
Однако такое положение не могло длиться вечно. Количество отключений сокращалось и в какой-то момент они практически вообще прекратились. Однако параллельно на рынке бытовых товаров стали появляться отопительные котлы, оборудованные циркуляционными насосами, приводными задвижками и электронным управлением. Такие котлы требовали высококачественного бесперебойного электропитания. В противном случае, при отключении электричества работа системы отопления полностью нарушалась.
И вот тут возникала некая дилемма. Многие владельцы отопительного чуда уже обладали бесперебойными источниками, мощности которых с лихвой хватало для питания котла. Однако, вот беда, циркуляционные насосы ни в какую не хотели крутиться от «прямоугольной синусоиды». Для чудо-котла надо было приобретать новый чудо-бесперебойный источник, формирующий на выходе чистейшую синусоиду. А куда же теперь девать старый, к которому уже душой прикипели. Нехорошо как-то все это!
Но положение не безвыходное и старый друг нам еще послужит! Для питания асинхронного двигателя от прямоугольного напряжения можно использовать фильтр Отто. Есть множество положительных примеров практического воплощения такого подхода. Однако такой вариант не самый простой и, уж точно, не универсальный. После продолжительной и утомительной настройки фильтр можно будет использовать только с конкретным двигателем. Хотелось бы чего-то более универсального. Таким более универсальным решением будет использование в качестве фильтра феррорезонансного или подобного ему стабилизатора. При этом феррорезонансный стабилизатор, включенный после бесперебойного источника, будет не только исправлять форму его выходного напряжения в периоды отсутствия сети (работа от аккумулятора), но и будет стабилизировать напряжение сети в моменты его присутствия.
Ниже приводится описание и принципиальная электрическая схема феррорезонансного стабилизатора мощностью 1000 Вт. В статье приведены формулы и методика расчета, которая позволит вам пересчитать стабилизатор на другую мощность, если это потребуется.
Феррорезонансный стабилизатор
Феррорезонансные стабилизаторы имеют ряд достоинств, таких как высокая надежность и быстродействие, широкий диапазон входных напряжений, хорошая стабильность выходного напряжения, способность к исправлению формы сильно искаженного входного напряжения. Однако, не смотря на все свои достоинства, эти стабилизаторы имеют и некоторые недостатки, к которым можно отнести относительно низкую удельную мощность и высокий уровень шумов, создаваемых при работе.
Не так давно, в 60-80-х годах прошлого века, феррорезонансные стабилизаторы широко использовались в быту для питания ламповых телевизоров. И старшее поколение читателей, скорей всего, до сих пор помнит тот надрывный гул, которым сопровождалась работа этих аппаратов, которые различались формой и расцветкой, но имели вес 10-15 кг при мощности 250-350 Вт.
Основным источником шумов в феррорезонансном стабилизаторе является насыщающийся дроссель. В работе сердечник этого дросселя постоянно насыщается, что приводит к изменению его линейных размеров. Это явление называется магнитострикционным эффектом. О «шумности» этого эффекта говорит хотя бы тот факт, что он широко используется в гидроакустике для генерации мощных акустических волн. Следовательно, если мы хотим построить тихий стабилизатор, то в первую очередь должны избавиться от насыщающегося дросселя. Однако нельзя просто так выбрасывать неугодные комплектующие из стабилизатора. В этом случае мы рискуем потерять его функциональность. Чтобы этого не произошло, сначала нужно найти достойную замену. И на нашу удачу такая достоянная замена имеется. Еще в 70-х годах прошлого столетия была доказана возможность замены насыщающегося дросселя последовательной цепочкой, состоящей из линейного дросселя и двух встречно-параллельных тиристоров . Такая цепь ведет себя аналогично насыщающемуся дросселю, но в отличие от него имеет меньшие размеры и массу, может оперативно регулироваться за счет управления тиристорами, обеспечивает меньшие потери и, самое главное, гораздо меньше шумит. В технической литературе такая цепочка зачастую называется резонансным тиристорным регулятором (РТР) . При необходимости, два встречно-параллельных тиристора РТР можно с успехом заменить одним симистором.
Работа стабилизатора
Функциональная схема стабилизатора с РТР изображена на Рисунке 1.
Рисунок 1.
Функциональная схема стабилизатора с РТР.
Стабилизатор с РТР имеет практически тот же принцип действия, что и феррорезонансный стабилизатор. Выходное напряжение UН поддерживается на требуемом уровне (220 В). Когда напряжение питающей сети UС имеет минимальное значение, симистор VS1 заперт. При этом напряжение UН поднимается до требуемого уровня за счет резонанса в колебательном контуре L1C1. Если же напряжение питающей сети UС имеет максимально допустимое значение, то симистор VS1 постоянно открыт. При этом дроссели L1 и L2 образуют делитель переменного напряжения, уменьшающий сетевое напряжение до требуемого уровня. В феррорезонансном стабилизаторе насыщающийся дроссель также максимально используется при максимальном входном напряжении, и минимально при минимальном. Дроссель L3 совместно с конденсатором С1 образует фильтр третьей гармоники, улучшающий форму выходного напряжения стабилизатора.
Рисунок 2.
Осциллограммы основных напряжений и токов стабилизатора с РТР.
Рассмотрим подробнее работу стабилизатора с РТР. На Рисунке 2 изображены осциллограммы основных напряжений и токов стабилизатора с РТР. Выходное напряжение стабилизатора UН выпрямляется при помощи выпрямителя В2. Выпрямленное напряжение UВ2 поступает на фильтр Ф, который выделяет из него среднее, действующее или амплитудное значение, в зависимости от того, какое значение выходного напряжения UН требуется стабилизировать. Далее напряжение с выхода фильтра поступает на сумматор, где сравнивается с опорным напряжением UОП. С выхода сумматора напряжение ошибки поступает на регулятор Рег, который формирует управляющий сигнал, призванный компенсировать отклонение выходного напряжения стабилизатора. Выходное напряжение регулятора UПОР поступает на вход порогового устройства ПУ и определяет его порог срабатывания. На другой вход порогового устройства подается синхронизирующее напряжение UВ1, привязанное к моментам перехода через ноль выходного напряжения UН стабилизатора. На выходе порогового устройства ПУ формируются импульсы управления UУПР, которые усиливаются усилителем мощности УМ и в требуемой полярности поступают на управляющий электрод симистора VS1. Синхронизирующее напряжение создается при помощи интегратора Инт и выпрямителя В1. Благодаря интегратору, импульсы выпрямленного напряжения UВ1 отстают от импульсов UВ2 на 5 мс (фазовый сдвиг –90°).
Импульсы управления UУПР формируются на нарастающем фронте UВ1 между нулевым и амплитудным значением этого напряжения. При увеличении порогового напряжения UПОР импульсы управления максимально сдвигаются к амплитудному значению UВ1 и, соответственно, к нулевому значению UВ2. В этом случае симистор открывается в районе нулевого значения UН и через линейный дроссель L2 протекает незначительный ток IL2, который не оказывает существенного влияния на выходное напряжение стабилизатора. При уменьшении порогового напряжения Uпор импульс управления сдвигается в сторону амплитудного значения UН и через линейный дроссель L2 начинает протекать существенный ток, который шунтирует выход стабилизатора и уменьшает величину его выходного напряжения.
Если выходное напряжение стабилизатора меньше требуемого, то регулятор Рег увеличивает пороговое напряжение UПОР. В результате ток, протекающий через дроссель L2, уменьшается, и выходное напряжение стабилизатора возрастает за счет резонанса в колебательном контуре L1C1. Если выходное напряжение больше требуемого, то регулятор Рег уменьшает пороговое напряжение UПОР. В результате ток, протекающий через дроссель L2, увеличивается и выходное напряжение стабилизатора уменьшается.
Расчет силовой схемы стабилизатора
Рассмотрим практическую методику расчета стабилизатора мощностью 1000 ВА. Такой стабилизатор может использоваться как независимое устройство или совместно с устаревшими источниками бесперебойного питания для получения синусоидальной формы напряжения.
Принципиальная электрическая схема силовых цепей стабилизатора с РТР мощностью SН = 1000 ВА изображена на Рисунке 3. Стабилизатор рассчитан на работу от сети переменного тока 220 В 50 Гц c нагрузкой, имеющей коэффициент мощности cos φН ≥ 0.7, и формирует выходное напряжение UН = 220 В ±1% во всем диапазоне нагрузок при изменении входного напряжения от 150 до 260 В.
Рисунок 3.
Принципиальная электрическая схема силовых цепей стабилизатора с РТР мощностью 1000 ВА.
Первым делом необходимо определить емкость резонансного конденсатора. Реактивную мощность резонансного конденсатора для стабилизатора без фильтра третьей гармоники можно найти по формуле:
где:
– угловая частота сетевого напряжения, рад/с.
Зная реактивную мощность резонансного конденсатора, найдем его емкость:
Найдем индуктивность линейного дросселя L1:
Найдем индуктивность линейного дросселя L2:
Найдем индуктивность линейного дросселя L3:
Так как в стабилизаторе для улучшения формы выходного напряжения установлен фильтр третьей гармоники, емкость резонансного конденсатора можно уменьшить:
В качестве C1 можно использовать компенсирующие конденсаторы типа К78-99 или аналогичные, предназначенные для коррекции коэффициента мощности электромагнитных дросселей газоразрядных ламп. Например, можно использовать два включенных параллельно конденсатора К78-99 емкостью 50 мкФ, рассчитанных на напряжение 250 В переменного тока. Для этой же цели можно использовать конденсатор типа МБГВ 100 мкФ на напряжение 1000 В.
Практический опыт повторения конструкции преобразователя меандра в синусоиду на основе резонансного фильтра. (10+)
Опыт повторения конструкции фильтра
Материал является пояснением и дополнением к статье: Получаем синусоиду от инвертора Как получить чистую синусоиду 220 вольт от автомобильного аккумулятора, чтобы запитать бытовые и специальные электроприборы. Применяем инвертор и оригинальную схему фильтра.
Хотел бы поблагодарить автора статьи за замечательную реализацию идеи резонансных LC фильтров. Моя ситуация заключалась в следующем: я приобрел небольшой инверторный генератор на 6кВА. Большим его преимуществом стало для меня то, что он весьма легковесный (58кг), соответственно, его не нужно устанавливать стационарно на улице или в отдельном помещении. Можно выкатывать на улицу и закатывать обратно в гараж по мере необходимости. Также он обеспечивает стабильное напряжение и частоту. Недостаток был один и весьма существенный — на выходе генератора не синусоида, а модифицированный меандр.
Осциллограмма напряжения на выходе генератора
Вашему вниманию подборка материалов:
Практика проектирования электронных схем Искусство разработки устройств. Элементная база. Типовые схемы. Примеры готовых устройств. Подробные описания. Онлайн расчет. Возможность задать вопрос авторам
Подобный тип выходного напряжения очень пагубно сказывается на реактивных нагрузках. Блоки питания телевизоров жужжат, трансформаторы, электродвигатели и насосы греются, и вполне вероятен выход их из строя. Сигнал содержит большое количество высокочастотных составляющих.
Решения проблемы было два: первое мне не подходило по определению. Это приобретение генератора с чистой синусоидой на выходе. Во-первых, потому что такие генераторы требуют уличной стационарной установки, либо установки в специальном помещении, которого у меня нет. Во, вторых, они тяжелы. Устанавливать на улице я не очень хотел, потому что зимняя эксплуатация сразу доставит много проблем, учитывая то, что это аварийное питание и включается нечасто. В-третьих, они дороже минимум в 2.5 раза, чем мой. Второе решение заключалось в поиске схемы, которая уберет высокочастотные составляющие из спектра тока и, в идеале, приблизит подаваемый на вход сигнал к чистой синусоиде 50 Гц.
После изучения всех вариантов я остановился на описанном в статье решении на базе силовых резонансных фильтров. Автор статьи любезно отвечал мне на все возникавшие вопросы и благодаря ему я быстро смог продвинуться в создании своего собственного фильтра. Рассчитывал я его на ток 18А. С запасом, чтобы предотвратить насыщение сердечника на больших токах — до 16А. Параллельный контур я оставил как в статье — на 10А. Там большие токи не проходят.
Медь для обмотки я нашел достаточно быстро. Конденсаторы тоже. Сразу на 100мкФ — пусковые. Определенные проблемы возникли только с поиском трансформаторного железа. Но и это было преодолено, и я приступил к сборке.
Настраивал я контуры не последовательно, а параллельно. Мне так было удобнее. В нагрузку включал также лампу накаливания. После намотки первого дросселя (10А) — для параллельного фильтра, я замерил индуктивность катушки без прокладки. Прибор показал 120мГн. Чему я был очень рад. Дальше я начал настраивать контур в резонанс, увеличивая толщину прокладки.
Второй контур с дросселем на 18А я также настраивал в резонанс на параллельном включении. Тут уже катушка без прокладки показала мне 420мГн.
В результате тонкой настройки я получил на выходе обоих контуров вот такой сигнал (порядка 20В действующего). Спираль лампы накаливания была еле красноватой:
Выход параллельного LC фильтра. 20В/деление.
Это минимальное напряжение, которое мне удалось получить на фильтре.
Затем я собрал схему уже как положено. На стенде.
Трансформаторные пластины были стянуты, залиты. Дроссели были стянуты диэлектрическими бандажами и помещены в корпус.
На вход фильтра я подал напряжение сети 220В. С нагрузкой в виде лампы накаливания 100Вт на выходе получилось падение 13В. Это составило 207В.
Самое приятное меня ожидало впереди. Я подал напряжение с генератора на фильтр и получил на выходе: о чудо! Только первую гармонику! Сигнал с фильтра опередил по качеству сигнал с трансформаторной подстанции.
Выход с резонансного LC — фильтра. 100В/деление.
Под нагрузкой я получил некоторое весьма незначительное искажение синусоиды по верхнему фронту, но график все равно остался лучше, чем с подстанции. Также получил падение напряжения, которое зависит от нагрузки. Но в среднем рабочем режиме я имею порядка 205В. Меня и мои домашние приборы это вполне устроило. Но тем, кто будет собирать эти фильтры после меня, могу порекомендовать: делайте все возможное, чтобы сократить количество витков на дросселях и наматывайте их проводом максимально возможного сечения. Это уменьшит падение напряжения под нагрузкой!
Сегодня я все же провел небольшой апгрейд. На дроссель параллельного фильтра намотал еще около 25 витков изолированным проводом и сделал вольтодобавку. Вот по этой схеме:
Схема фильтра с вольтодобавочным трансформатором
Получил +8 Вольт к напряжению источника. Теперь на холостом ходу при входном напряжении 222В у меня не 212, как раньше, а 230В.
Осциллограмма с выхода фильтра с вольтодобавочным трансформатором. На входе — генератор. Частота по входу — 50.0Гц +/- 0.3Гц. 100В/деление.
Теперь у меня спокойно работают от генератора через фильтр: холодильники, насосы (глубинный и циркуляционные), газовый котел, трансформаторы и прочее, чувствительное к синусоиде, оборудование. И самое главное — я нашел на самом деле реальное практическое решение для преобразования меандра в синусоиду. В единственном, на просторах Интернет, месте. Да, и еще я получил очень хороший экономический эффект. Выражаю еще раз благодарность команде hw4.ru и автору статьи!
К сожалению в статьях периодически встречаются ошибки, они исправляются, статьи дополняются, развиваются, готовятся новые. Подпишитесь, на новости, чтобы быть в курсе.
Ребята! Было бы очень круто если бы Вы пояснили. Хочу тоже сделать, но на ток 6 ампер (1200W). Для двухтактного дросселя какое значение индуктивности? (для каждой обмотки, которые потом соединены последовательно). Кондеры по 100 мкф? Второй дроссель (однотактный) какой индуктивности? Читать ответ.
Здравствуйте! Опишите пожалуйста подробнее процесс настройки (как и на сколько меняются значения напряжения). У меня при расчетном зазоре напряжение на дросселе равно сетевому напряжению. При уменьшении зазора напряжение начинает занижаться относительно входного. Читать ответ.
Реактивный ток через конденсатор, по моему, не должен его греть, все, по моему, зависит от материала конденсатора и максимально возможного тока через него — на 50гц и 300в и 100мкф максимальный ток составит около 10а это при прямом включении в сеть и нагрузку (он греться не должен), но в резонансе сопротивление LC контура ничтожно и ток превышает рабочий — тут вот при 16 А Читать ответ.
Совершенно верно, что параллельный контур на резонансе имеет очень большое сопротивление току — это верно равноценно обрыву цепи, Вопрос: так может быть его вообще убрать (с последовательным все понятно -максимальный ток в резонансе и превращение меандра в синусоиду)? Читать ответ.
Уважаемый автор, можно ли вместо двух дросселей, используемых в резонансном фильтре, использовать один ЛАТР подходящей мощности с движком, установленным посредине? Заранее благодарен за любой ответ. Читать ответ.
Отписываюсь по итогам сборки, наладки и испытания фильтра. Фильтр собран подобный вашему, только у вас Г-образный, а у меня Т-образный. Но главное отличие в том, что в вашем фильтре параллельный колебательный контур настроен на частоту 50 Гц, что совершенно недопустимо, т.к. при таком режиме он имеет минимальное сопротивление, равное активному сопротивлению катушки — а это пра Читать ответ.
Всё очень красиво смотрится, особенно синусоида на выходе фильтра. Только вызывает сомнение, что неполярные конденсаторы (изображённые на фото) будут достаточно долго работать на токах порядка 15А. На взгляд умудрённого опытом электрика маловат их габарит и сечение выводов. Подобный фильтр я изготовлю, только на рабочий ток 1А (для циркуляционного насоса и лампочки аварий Читать ответ.
А автор статьи не думал делать такие фильтры на заказа? У провайдеров есть довольно таки существенный спрос на такие вещи. Мы бы вот купили себе тоже такой фильтр именно для того что бы во время отключения электроэнергии на генераторе висеть без проблем. Реально не могли бы такой один фильтр собрать за деньги на заказ? Думаю после нас еще подтянутся провайдеры. Читать ответ.
Бесперебойник своими руками. ИБП, UPS сделать самому. Синус, синусоида. Как сделать бесперебойник самому? Чисто синусоидальное напряжение на выходе, при.
Опыт повторения, сборки, наладки резонансного фильтра для получения си. Расчет, сборка и наладка фильтра высших гармоник для получения мощного синусоида.
Изготовление дросселя, катушки индуктивности своими руками, самому, са. Расчет и изготовление катушки индуктивности, дросселя. Типовые электронные схемы.
устройство для резервного, аварийного, запасного питания котла, циркул. У меня установлен газовый отопительный турбо котел, требующий электропитания. Кр.
Силовой импульсный преобразователь, источник синуса, синусоиды, синусо. Принцип работы, самостоятельное изготовление и наладка импульсного силового прео.
Практический опыт повторения конструкции преобразователя меандра в синусоиду на основе резонансного фильтра. (10+)
Опыт повторения конструкции фильтра
Материал является пояснением и дополнением к статье: Получаем синусоиду от инвертора Как получить чистую синусоиду 220 вольт от автомобильного аккумулятора, чтобы запитать бытовые и специальные электроприборы. Применяем инвертор и оригинальную схему фильтра.
Хотел бы поблагодарить автора статьи за замечательную реализацию идеи резонансных LC фильтров. Моя ситуация заключалась в следующем: я приобрел небольшой инверторный генератор на 6кВА. Большим его преимуществом стало для меня то, что он весьма легковесный (58кг), соответственно, его не нужно устанавливать стационарно на улице или в отдельном помещении. Можно выкатывать на улицу и закатывать обратно в гараж по мере необходимости. Также он обеспечивает стабильное напряжение и частоту. Недостаток был один и весьма существенный — на выходе генератора не синусоида, а модифицированный меандр.
Осциллограмма напряжения на выходе генератора
Вашему вниманию подборка материалов:
Практика проектирования электронных схем Искусство разработки устройств. Элементная база. Типовые схемы. Примеры готовых устройств. Подробные описания. Онлайн расчет. Возможность задать вопрос авторам
Подобный тип выходного напряжения очень пагубно сказывается на реактивных нагрузках. Блоки питания телевизоров жужжат, трансформаторы, электродвигатели и насосы греются, и вполне вероятен выход их из строя. Сигнал содержит большое количество высокочастотных составляющих.
Решения проблемы было два: первое мне не подходило по определению. Это приобретение генератора с чистой синусоидой на выходе. Во-первых, потому что такие генераторы требуют уличной стационарной установки, либо установки в специальном помещении, которого у меня нет. Во, вторых, они тяжелы. Устанавливать на улице я не очень хотел, потому что зимняя эксплуатация сразу доставит много проблем, учитывая то, что это аварийное питание и включается нечасто. В-третьих, они дороже минимум в 2.5 раза, чем мой. Второе решение заключалось в поиске схемы, которая уберет высокочастотные составляющие из спектра тока и, в идеале, приблизит подаваемый на вход сигнал к чистой синусоиде 50 Гц.
После изучения всех вариантов я остановился на описанном в статье решении на базе силовых резонансных фильтров. Автор статьи любезно отвечал мне на все возникавшие вопросы и благодаря ему я быстро смог продвинуться в создании своего собственного фильтра. Рассчитывал я его на ток 18А. С запасом, чтобы предотвратить насыщение сердечника на больших токах — до 16А. Параллельный контур я оставил как в статье — на 10А. Там большие токи не проходят.
Медь для обмотки я нашел достаточно быстро. Конденсаторы тоже. Сразу на 100мкФ — пусковые. Определенные проблемы возникли только с поиском трансформаторного железа. Но и это было преодолено, и я приступил к сборке.
Настраивал я контуры не последовательно, а параллельно. Мне так было удобнее. В нагрузку включал также лампу накаливания. После намотки первого дросселя (10А) — для параллельного фильтра, я замерил индуктивность катушки без прокладки. Прибор показал 120мГн. Чему я был очень рад. Дальше я начал настраивать контур в резонанс, увеличивая толщину прокладки.
Второй контур с дросселем на 18А я также настраивал в резонанс на параллельном включении. Тут уже катушка без прокладки показала мне 420мГн.
В результате тонкой настройки я получил на выходе обоих контуров вот такой сигнал (порядка 20В действующего). Спираль лампы накаливания была еле красноватой:
Выход параллельного LC фильтра. 20В/деление.
Это минимальное напряжение, которое мне удалось получить на фильтре.
Затем я собрал схему уже как положено. На стенде.
Трансформаторные пластины были стянуты, залиты. Дроссели были стянуты диэлектрическими бандажами и помещены в корпус.
На вход фильтра я подал напряжение сети 220В. С нагрузкой в виде лампы накаливания 100Вт на выходе получилось падение 13В. Это составило 207В.
Самое приятное меня ожидало впереди. Я подал напряжение с генератора на фильтр и получил на выходе: о чудо! Только первую гармонику! Сигнал с фильтра опередил по качеству сигнал с трансформаторной подстанции.
Выход с резонансного LC — фильтра. 100В/деление.
Под нагрузкой я получил некоторое весьма незначительное искажение синусоиды по верхнему фронту, но график все равно остался лучше, чем с подстанции. Также получил падение напряжения, которое зависит от нагрузки. Но в среднем рабочем режиме я имею порядка 205В. Меня и мои домашние приборы это вполне устроило. Но тем, кто будет собирать эти фильтры после меня, могу порекомендовать: делайте все возможное, чтобы сократить количество витков на дросселях и наматывайте их проводом максимально возможного сечения. Это уменьшит падение напряжения под нагрузкой!
Сегодня я все же провел небольшой апгрейд. На дроссель параллельного фильтра намотал еще около 25 витков изолированным проводом и сделал вольтодобавку. Вот по этой схеме:
Схема фильтра с вольтодобавочным трансформатором
Получил +8 Вольт к напряжению источника. Теперь на холостом ходу при входном напряжении 222В у меня не 212, как раньше, а 230В.
Осциллограмма с выхода фильтра с вольтодобавочным трансформатором. На входе — генератор. Частота по входу — 50.0Гц +/- 0.3Гц. 100В/деление.
Теперь у меня спокойно работают от генератора через фильтр: холодильники, насосы (глубинный и циркуляционные), газовый котел, трансформаторы и прочее, чувствительное к синусоиде, оборудование. И самое главное — я нашел на самом деле реальное практическое решение для преобразования меандра в синусоиду. В единственном, на просторах Интернет, месте. Да, и еще я получил очень хороший экономический эффект. Выражаю еще раз благодарность команде hw4.ru и автору статьи!
К сожалению в статьях периодически встречаются ошибки, они исправляются, статьи дополняются, развиваются, готовятся новые. Подпишитесь, на новости, чтобы быть в курсе.
Ребята! Было бы очень круто если бы Вы пояснили. Хочу тоже сделать, но на ток 6 ампер (1200W). Для двухтактного дросселя какое значение индуктивности? (для каждой обмотки, которые потом соединены последовательно). Кондеры по 100 мкф? Второй дроссель (однотактный) какой индуктивности? Читать ответ.
Здравствуйте! Опишите пожалуйста подробнее процесс настройки (как и на сколько меняются значения напряжения). У меня при расчетном зазоре напряжение на дросселе равно сетевому напряжению. При уменьшении зазора напряжение начинает занижаться относительно входного. Читать ответ.
Реактивный ток через конденсатор, по моему, не должен его греть, все, по моему, зависит от материала конденсатора и максимально возможного тока через него — на 50гц и 300в и 100мкф максимальный ток составит около 10а это при прямом включении в сеть и нагрузку (он греться не должен), но в резонансе сопротивление LC контура ничтожно и ток превышает рабочий — тут вот при 16 А Читать ответ.
Совершенно верно, что параллельный контур на резонансе имеет очень большое сопротивление току — это верно равноценно обрыву цепи, Вопрос: так может быть его вообще убрать (с последовательным все понятно -максимальный ток в резонансе и превращение меандра в синусоиду)? Читать ответ.
Уважаемый автор, можно ли вместо двух дросселей, используемых в резонансном фильтре, использовать один ЛАТР подходящей мощности с движком, установленным посредине? Заранее благодарен за любой ответ. Читать ответ.
Отписываюсь по итогам сборки, наладки и испытания фильтра. Фильтр собран подобный вашему, только у вас Г-образный, а у меня Т-образный. Но главное отличие в том, что в вашем фильтре параллельный колебательный контур настроен на частоту 50 Гц, что совершенно недопустимо, т.к. при таком режиме он имеет минимальное сопротивление, равное активному сопротивлению катушки — а это пра Читать ответ.
Всё очень красиво смотрится, особенно синусоида на выходе фильтра. Только вызывает сомнение, что неполярные конденсаторы (изображённые на фото) будут достаточно долго работать на токах порядка 15А. На взгляд умудрённого опытом электрика маловат их габарит и сечение выводов. Подобный фильтр я изготовлю, только на рабочий ток 1А (для циркуляционного насоса и лампочки аварий Читать ответ.
А автор статьи не думал делать такие фильтры на заказа? У провайдеров есть довольно таки существенный спрос на такие вещи. Мы бы вот купили себе тоже такой фильтр именно для того что бы во время отключения электроэнергии на генераторе висеть без проблем. Реально не могли бы такой один фильтр собрать за деньги на заказ? Думаю после нас еще подтянутся провайдеры. Читать ответ.
Бесперебойник своими руками. ИБП, UPS сделать самому. Синус, синусоида. Как сделать бесперебойник самому? Чисто синусоидальное напряжение на выходе, при.
Опыт повторения, сборки, наладки резонансного фильтра для получения си. Расчет, сборка и наладка фильтра высших гармоник для получения мощного синусоида.
Изготовление дросселя, катушки индуктивности своими руками, самому, са. Расчет и изготовление катушки индуктивности, дросселя. Типовые электронные схемы.
устройство для резервного, аварийного, запасного питания котла, циркул. У меня установлен газовый отопительный турбо котел, требующий электропитания. Кр.
Силовой импульсный преобразователь, источник синуса, синусоиды, синусо. Принцип работы, самостоятельное изготовление и наладка импульсного силового прео.
Вступление
Еще не стерлись из памяти события «лихих» 90-х. Помнится МММ, разгул криминала, веерные отключения электроэнергии. На Украине, например, во второй половине 90-х дело доходило до того, что свет в жилых районах выключали на 2 часа через каждые 2 часа. Помнится, наиболее коварным был зимний период темноты между пятью и семью часами вечера. Как раз, когда народ возвращался с работы. Выгружаешься на остановке, автобус уезжает, и ты остаешься в полной темноте. Пытаешься привыкнуть, трешь глаза, давишь на глазные яблоки. Все безрезультатно, вокруг полная темнота. Делать нечего, осторожно ступаешь во мраке, пытаясь нащупать заветный забор, который должен вывести к родной калитке и потихоньку, на ощупь, домой.
Однако в этих мытарствах были и положительные элементы. Например, резко возрос спрос на разные бензо- и дизель-генераторы, а также на электронные преобразователи и бесперебойные источники тока. Последнее обстоятельство позволило людям творческим применить свои профессиональные навыки и даже немного улучшить на этом поприще свое финансовое положение. А там, глядишь, появились различные фирмочки, выпускающие эти самые преобразователи и бесперебойники. Какой-никакой подъем в экономике образовался, дополнительные рабочие места и т. п. Собственно, и Ваш покорный слуга, примерно в те времена, из электроники слабосильной подался в электронику силовую.
Нельзя сказать, что тогда с этой самой электроникой сильно мудрили. Делали, чтобы было просто, надежно и дешево. В принципе, для того чтобы питать одну-две лампочки, больше ничего и не требовалось. Однако по мере развития процесса конкуренция ужесточалась. Народу уже стало из чего выбирать. Особо привередливые начали интересоваться формой напряжения на выходе преобразователей и бесперебойников. На что им очень обтекаемо отвечали, что форма там практически синусоидальная, но лишь слегка модифицированная. Более честные говорили, что там присутствует синусоида, но только квадратная. А уж совсем честные говорили напрямую, что их преобразователи и бесперебойники формируют на выходе прямоугольное напряжение с паузой. Но параметры этого напряжения (амплитудное и действующее значение, а также частота) практически соответствуют аналогичным параметрам однофазного переменного напряжения бытовой электросети. В принципе, такое напряжение вполне подходило для основных бытовых электропотребителей, таких телевизоры, компьютеры, а также накальные и люминесцентные лампы. Те же электропотребители, которые требовали чисто синусоидального напряжения (асинхронные двигатели, например), были в меньшинстве и погоды особой не делали.
Однако такое положение не могло длиться вечно. Количество отключений сокращалось и в какой-то момент они практически вообще прекратились. Однако параллельно на рынке бытовых товаров стали появляться отопительные котлы, оборудованные циркуляционными насосами, приводными задвижками и электронным управлением. Такие котлы требовали высококачественного бесперебойного электропитания. В противном случае, при отключении электричества работа системы отопления полностью нарушалась.
И вот тут возникала некая дилемма. Многие владельцы отопительного чуда уже обладали бесперебойными источниками, мощности которых с лихвой хватало для питания котла. Однако, вот беда, циркуляционные насосы ни в какую не хотели крутиться от «прямоугольной синусоиды». Для чудо-котла надо было приобретать новый чудо-бесперебойный источник, формирующий на выходе чистейшую синусоиду. А куда же теперь девать старый, к которому уже душой прикипели. Нехорошо как-то все это!
Но положение не безвыходное и старый друг нам еще послужит! Для питания асинхронного двигателя от прямоугольного напряжения можно использовать фильтр Отто. Есть множество положительных примеров практического воплощения такого подхода. Однако такой вариант не самый простой и, уж точно, не универсальный. После продолжительной и утомительной настройки фильтр можно будет использовать только с конкретным двигателем. Хотелось бы чего-то более универсального. Таким более универсальным решением будет использование в качестве фильтра феррорезонансного или подобного ему стабилизатора. При этом феррорезонансный стабилизатор, включенный после бесперебойного источника, будет не только исправлять форму его выходного напряжения в периоды отсутствия сети (работа от аккумулятора), но и будет стабилизировать напряжение сети в моменты его присутствия.
Ниже приводится описание и принципиальная электрическая схема феррорезонансного стабилизатора мощностью 1000 Вт. В статье приведены формулы и методика расчета, которая позволит вам пересчитать стабилизатор на другую мощность, если это потребуется.
Феррорезонансный стабилизатор
Феррорезонансные стабилизаторы имеют ряд достоинств, таких как высокая надежность и быстродействие, широкий диапазон входных напряжений, хорошая стабильность выходного напряжения, способность к исправлению формы сильно искаженного входного напряжения. Однако, не смотря на все свои достоинства, эти стабилизаторы имеют и некоторые недостатки, к которым можно отнести относительно низкую удельную мощность и высокий уровень шумов, создаваемых при работе.
Не так давно, в 60-80-х годах прошлого века, феррорезонансные стабилизаторы широко использовались в быту для питания ламповых телевизоров. И старшее поколение читателей, скорей всего, до сих пор помнит тот надрывный гул, которым сопровождалась работа этих аппаратов, которые различались формой и расцветкой, но имели вес 10-15 кг при мощности 250-350 Вт.
Основным источником шумов в феррорезонансном стабилизаторе является насыщающийся дроссель. В работе сердечник этого дросселя постоянно насыщается, что приводит к изменению его линейных размеров. Это явление называется магнитострикционным эффектом. О «шумности» этого эффекта говорит хотя бы тот факт, что он широко используется в гидроакустике для генерации мощных акустических волн. Следовательно, если мы хотим построить тихий стабилизатор, то в первую очередь должны избавиться от насыщающегося дросселя. Однако нельзя просто так выбрасывать неугодные комплектующие из стабилизатора. В этом случае мы рискуем потерять его функциональность. Чтобы этого не произошло, сначала нужно найти достойную замену. И на нашу удачу такая достоянная замена имеется. Еще в 70-х годах прошлого столетия была доказана возможность замены насыщающегося дросселя последовательной цепочкой, состоящей из линейного дросселя и двух встречно-параллельных тиристоров [1]. Такая цепь ведет себя аналогично насыщающемуся дросселю, но в отличие от него имеет меньшие размеры и массу, может оперативно регулироваться за счет управления тиристорами, обеспечивает меньшие потери и, самое главное, гораздо меньше шумит. В технической литературе такая цепочка зачастую называется резонансным тиристорным регулятором (РТР) [2]. При необходимости, два встречно-параллельных тиристора РТР можно с успехом заменить одним симистором.
Работа стабилизатора
Функциональная схема стабилизатора с РТР [2] изображена на Рисунке 1.
Рисунок 1.
Функциональная схема стабилизатора с РТР.
Стабилизатор с РТР имеет практически тот же принцип действия, что и феррорезонансный стабилизатор. Выходное напряжение UН поддерживается на требуемом уровне (220 В). Когда напряжение питающей сети UС имеет минимальное значение, симистор VS1 заперт. При этом напряжение UН поднимается до требуемого уровня за счет резонанса в колебательном контуре L1C1. Если же напряжение питающей сети UС имеет максимально допустимое значение, то симистор VS1 постоянно открыт. При этом дроссели L1 и L2 образуют делитель переменного напряжения, уменьшающий сетевое напряжение до требуемого уровня. В феррорезонансном стабилизаторе насыщающийся дроссель также максимально используется при максимальном входном напряжении, и минимально при минимальном. Дроссель L3 совместно с конденсатором С1 образует фильтр третьей гармоники, улучшающий форму выходного напряжения стабилизатора.
Рисунок 2.
Осциллограммы основных напряжений и токов стабилизатора с РТР.
Рассмотрим подробнее работу стабилизатора с РТР. На Рисунке 2 изображены осциллограммы основных напряжений и токов стабилизатора с РТР. Выходное напряжение стабилизатора UН выпрямляется при помощи выпрямителя В2. Выпрямленное напряжение UВ2 поступает на фильтр Ф, который выделяет из него среднее, действующее или амплитудное значение, в зависимости от того, какое значение выходного напряжения UН требуется стабилизировать. Далее напряжение с выхода фильтра поступает на сумматор, где сравнивается с опорным напряжением UОП. С выхода сумматора напряжение ошибки поступает на регулятор Рег, который формирует управляющий сигнал, призванный компенсировать отклонение выходного напряжения стабилизатора. Выходное напряжение регулятора UПОР поступает на вход порогового устройства ПУ и определяет его порог срабатывания. На другой вход порогового устройства подается синхронизирующее напряжение UВ1, привязанное к моментам перехода через ноль выходного напряжения UН стабилизатора. На выходе порогового устройства ПУ формируются импульсы управления UУПР, которые усиливаются усилителем мощности УМ и в требуемой полярности поступают на управляющий электрод симистора VS1. Синхронизирующее напряжение создается при помощи интегратора Инт и выпрямителя В1. Благодаря интегратору, импульсы выпрямленного напряжения UВ1 отстают от импульсов UВ2 на 5 мс (фазовый сдвиг –90°).
Импульсы управления UУПР формируются на нарастающем фронте UВ1 между нулевым и амплитудным значением этого напряжения. При увеличении порогового напряжения UПОР импульсы управления максимально сдвигаются к амплитудному значению UВ1 и, соответственно, к нулевому значению UВ2. В этом случае симистор открывается в районе нулевого значения UН и через линейный дроссель L2 протекает незначительный ток IL2, который не оказывает существенного влияния на выходное напряжение стабилизатора. При уменьшении порогового напряжения Uпор импульс управления сдвигается в сторону амплитудного значения UН и через линейный дроссель L2 начинает протекать существенный ток, который шунтирует выход стабилизатора и уменьшает величину его выходного напряжения.
Если выходное напряжение стабилизатора меньше требуемого, то регулятор Рег увеличивает пороговое напряжение UПОР. В результате ток, протекающий через дроссель L2, уменьшается, и выходное напряжение стабилизатора возрастает за счет резонанса в колебательном контуре L1C1. Если выходное напряжение больше требуемого, то регулятор Рег уменьшает пороговое напряжение UПОР. В результате ток, протекающий через дроссель L2, увеличивается и выходное напряжение стабилизатора уменьшается.
Расчет силовой схемы стабилизатора
Рассмотрим практическую методику расчета стабилизатора мощностью 1000 ВА. Такой стабилизатор может использоваться как независимое устройство или совместно с устаревшими источниками бесперебойного питания для получения синусоидальной формы напряжения.
Принципиальная электрическая схема силовых цепей стабилизатора с РТР мощностью SН = 1000 ВА изображена на Рисунке 3. Стабилизатор рассчитан на работу от сети переменного тока 220 В 50 Гц c нагрузкой, имеющей коэффициент мощности cos φН ≥ 0.7, и формирует выходное напряжение UН = 220 В ±1% во всем диапазоне нагрузок при изменении входного напряжения от 150 до 260 В.
Рисунок 3.
Принципиальная электрическая схема силовых цепей стабилизатора с РТР мощностью 1000 ВА.
Первым делом необходимо определить емкость резонансного конденсатора. Реактивную мощность резонансного конденсатора для стабилизатора без фильтра третьей гармоники можно найти по формуле:
– угловая частота сетевого напряжения, рад/с.
Зная реактивную мощность резонансного конденсатора, найдем его емкость:
Найдем индуктивность линейного дросселя L1:
Найдем индуктивность линейного дросселя L2:
Найдем индуктивность линейного дросселя L3:
Так как в стабилизаторе для улучшения формы выходного напряжения установлен фильтр третьей гармоники, емкость резонансного конденсатора можно уменьшить:
В качестве C1 можно использовать компенсирующие конденсаторы типа К78-99 или аналогичные, предназначенные для коррекции коэффициента мощности электромагнитных дросселей газоразрядных ламп. Например, можно использовать два включенных параллельно конденсатора К78-99 емкостью 50 мкФ, рассчитанных на напряжение 250 В переменного тока. Для этой же цели можно использовать конденсатор типа МБГВ 100 мкФ на напряжение 1000 В.
Конструкция/устройство винтового компрессора
В данной статье мы расскажем об основных элементах конструкции винтового компрессора и о его устройстве.
В настоящее время производством винтовых компрессоров занимается достаточно большое количество компаний по всему миру. Однако, как автомобиль состоит из кузова, двигателя и трансмиссии, так и винтовой компрессор разных производителей состоит из компонентов, имеющих различия в конструкции, но выполняющих одну и ту же задачу при работе агрегата.
Любой винтовой компрессор может быть схематично представлен следующим образом:
Основные элементы винтового компрессора
1 – входной фильтр
2 – всасывающий клапан
3 – винтовой блок
4 – электродвигатель
5 – масляный резервуар
6 – сепаратор
7 – клапан минимального давления
8 – термостат
9 – масляный фильтр
10 – воздушный радиатор
11 – масляный радиатор
12 – вентилятор
13 – обратный клапан
14 – сетчатый фильтр
15 – выход сжатого воздуха
Входной фильтр
На входе винтового компрессора обязательно устанавливается фильтр, задачей которого является предотвращение проникновения в компрессор вместе с засасываемым воздухом пыли и твердых механических частиц.
Он представляет собой, как правило, цилиндрический патрон из гофрированной бумаги и может устанавливаться как открыто, так и в корпусе.
Воздушный фильтр винтового компрессора
Размер ячейки входного фильтра в большинстве случаев составляет 10 мкм, а площадь его поверхности соответствует производительности компрессора.
Всасывающий клапан
Наличие на входе винтового компрессора всасывающего клапана (иногда его еще называют регулятором всасывания) является отличительной особенностью компрессоров данного типа. Закрытие и открытие всасывающего клапана позволяет легко переводить компрессор в режим холостого хода и работы под нагрузкой соответственно.
Запорный элемент всасывающего клапана имеет вид поворотного (заслонки) или поступательно двигающегося диска с уплотнением. Положение запорного элемента изменяется под действием сжатого воздуха, подаваемого во внутренний или внешний пневмоцилиндр из масляного резервуара через управляющий электромагнитный клапан.
Всасывающий клапан винтового компрессора
Всасывающий клапан винтового компрессора
Запуск винтового компрессора всегда происходит при закрытом всасывающем клапане. Но для того, чтобы в масляном резервуаре произошло накопление сжатого воздуха с давлением, достаточным для последующего воздействия на поршень управляющего пневмоцилиндра, всасывающий клапан имеет канал небольшого сечения с обратным клапаном.
Обратный клапан
Винтовой блок
Основным рабочим элементом компрессора является винтовой блок, в котором собственно и происходит процесс сжатия всасываемого через входной фильтр воздуха.
Винтовой блок
В корпусе винтового блока расположены два вращающихся ротора – ведущий и ведомый. При их вращении происходит движение воздуха от всасывающей стороны к нагнетающей с одновременным уменьшением объема межроторных полостей, т.е. сжатие.
Принцип сжатия воздуха в винтовом блоке
Зазор между роторами уплотняется находящимся в корпусе винтового блока маслом. Масло также служит для смазывания подшипников и отвода тепла, образующегося при сжатии воздуха.
Также существуют безмасляные винтовые компрессоры классического исполнения (без уплотняющей жидкости) и с водяным впрыском в камеру сжатия вместо масла.
Электродвигатель
Для передачи вращения ведущему ротору винтового блока, как правило, используется обычный трехфазный асинхронный электродвигатель.
Электродвигатель
Исключение составляют мобильные винтовые компрессоры, в которых в качестве источника вращения используется дизельный двигатель.
Дизельный компрессор
Вращение от вала двигателя ведущему ротору винтового блока может передаваться как при помощи клиноременной передачи:
Ременной привод
или через муфту с эластичным элементом (так называемый «прямой привод»).
Муфта эластичная
В некоторых случаях применяется шестеренчатый привод (в компрессорах большой производительности).
Нередко бывает необходимо регулировать производительность винтового компрессора, изменяя частоту вращения вала двигателя. В этом случае электропитание двигателя осуществляют при помощи специального устройства – частотного преобразователя.
Частотный преобразователь
Применение частотного преобразователя позволяет в широких пределах регулировать производительность винтового компрессора в зависимости от реальной потребности в сжатом воздухе, не прибегая к переводу агрегата в режим холостого хода закрытием всасывающего клапана.
Масляный резервуар
Масляный резервуар играет очень важную роль в работе винтового компрессора:
выполняет роль первичного аккумулятора сжатого воздуха;
увеличивает объем масляной системы компрессора и, соответственно, количества масла, необходимого для эффективного отвода тепла, образовывающегося при сжатии воздуха;
работает, как отделитель основной массы масла от сжатого воздуха, т.к. масло-воздушный поток попадает в резервуар из винтового блока по касательной к его цилиндрической поверхности – как бы «закручивается».
Масляный резервуар
Масляный резервуар
Сепаратор
Для того, чтобы выходящий из винтового компрессора сжатый воздух содержал минимальное количество масла, в его конструкции обязательно применяется сепаратор.
Сепаратор может быть внешним (в компрессорах небольшой мощности) и встроенным в масляный резервуар.
Внешний вид встроенного сепаратора:
Сепаратор встроенный
Сепаратор внешний:
Сепаратор внешний
Сепаратор в разрезе с указанием потока масла и воздуха:
Сепаратор в разрезе
Благодаря наличию в конструкции винтового компрессора сепаратора содержание масла в сжатом воздухе на выходе не превышает 3 мг/м3.
Клапан минимального давления
Для нормальной циркуляции масла при работе винтового компрессора необходимо, чтобы давление в масляном резервуаре не опускалось ниже определенного минимально необходимого уровня.
Когда в магистрали, на которую работает винтовой компрессор, уже присутствует давление, это условие выполняется. А вот в случае, когда компрессор используется для заполнения пустого воздухосборника, для создания в масляном резервуаре повышенного давления используется клапан минимального давления.
Клапан минимального давления
Клапан минимального давления в разрезе:
Клапан минимального давления в разрезе
Этот клапан открывается при давлении на его входе, превышающем определенное значение, которое задается регулировкой сжатия закрывающей клапан пружины. Типичным для винтовых компрессоров давлением открытия клапана является значение 4÷4,5 бар.
Термостат
В винтовом компрессоре, как и в двигателе автомобиля, существует два круга системы охлаждения – малый и большой.
Сразу после запуска компрессора масло в нем циркулирует по малому кругу, что обеспечивает довольно быстрый рост температуры. Это необходимо, чтобы при сжатии воздуха не происходило выпадение конденсата и смешивание его с маслом, значительно ухудшающее его эксплуатационные свойства.
Малый круг охлаждения
После достижения определенного значения температуры масла термостат открывается, направляя поток циркуляции по большому кругу – через охлаждаемый вентилятором радиатор.
Большой круг охлаждения
Как правило, открытие термостата начинается при температуре масла +55°С и полностью завершается при температуре +70°С.
Масляный фильтр
В процессе работы винтового компрессора в масле могут присутствовать механические примеси – продукты износа движущихся частей и частицы пыли, размер которых меньше размера ячейки входного фильтра.
Для очистки масла от этих примесей в циркуляционный контур компрессора включается масляный фильтр.
Для охлаждения сжимаемого винтовым компрессором воздуха его пропускают через радиатор, который обдувается вентилятором. Температура сжатого воздуха на выходе компрессора, как правило, превышает температуру окружающей среды не более, чем на 20÷30 °С.
Для охлаждения циркулирующего в компрессоре масла служит масляный радиатор. Обычно воздушный и масляный радиаторы объединены в единый блок и обдуваются одним вентилятором (двумя в компрессорах большой мощности).
Обычно вентилятор приводится в действие отдельным электродвигателем.
Вентиляторы охлаждения
В небольших компрессорах зачастую для обдува радиаторов используется вентилятор, входящий в состав приводного двигателя.
Вентилятор охлаждения на двигателе
Обратный клапан / Сетчатый фильтр
Масло, отделяемое от сжатого воздуха в сепараторе, требуется вернуть в циркуляционный контур компрессора. Для этого используется специальная масловозвратная линия, имеющая в своем составе обратный клапан и сетчатый фильтр.
Масловозвратная линия
Для того, чтобы процесс возврата масла можно было наблюдать в реальном времени (это необходимо в диагностических целях), некоторые детали масловозвратной линии выполняют прозрачными.
Масловозвратная линия
Выход сжатого воздуха
На выходной патрубок винтового компрессора необходимо установить запорный кран, позволяющий отключить компрессор от магистрали сжатого воздуха на время проведения технического обслуживания или ремонта.
Также для соединения выхода компрессора с магистралью рекомендуется использовать гибкое соединение (металлорукав) для устранения влияния температурных и вибрационных деформаций трубопровода на соединение.
Шаровый кран и металлорукав
Когда можно использовать ИБП с аппроксимированной синусоидой
С продукцией PowerCom российские потребители уже знакомы, да и мы не раз писали о ее представителях. В прошлый раз, например, в фокус нашего внимания попал достаточно серьезный аппарат PowerCom Smart King XL : весьма качественный, но объективно избыточный для большинства домашних применений. На этот раз в нашу лабораторию поступил компактный источник бесперебойного питания из новой серии Phantom, который как раз и должен в первую очередь заинтересовать тех, кто собирается обеспечить надежным питанием одно рабочее место.
Описание
Данная модель является линейно-интерактивным ИБП, то есть имеет встроенный AVR-регулятор, позволяющий при отклонении напряжения в достаточно широком диапазоне обойтись без перехода на батарейное питание и при этом поддерживать выходное напряжение в стандартном диапазоне.
У нас на тестировании побывала средняя (600 В·А) модель из линейки производителя, включающей варианты с мощностью от 500 до 1000 В·А. Производитель заявляет следующие характеристики изделия:
Технические характеристики
Входное напряжение, частота
140—300 В, 50 или 60 Гц (±1 Гц)
Выходное (при работе от батарей) напряжение, частота
220 В ±5%
Автоматический регулятор напряжения
да
Выходная мощность (заявленная)
600 В·А (360 Вт)
Выходная мощность (активная, измеренная)
410 Вт
Форма выходного сигнала при работе от батарей
ступенчатая аппроксимация синусоиды
Время автономной работы от батареи для стандартного ПК
13 минут для стандартной конфигурации с 17-дюймовым монитором (экв. 150 Вт)
Функция запуска оборудования без подключения к электросети
отключается программно; режимы: включение, переход в режим работы от аккумуляторов, сигнал низкого заряда батареи, перегрузка
Самодиагностика
при включении и по команде из ПО
Фильтрация импульсных помех
импульная защита: 460 Дж, 8/20 мкс
Защита от перегрузки
автоматически выключается, если перегрузка превышает 110% от номинала в течение 60 секунд или 130% в течение 3 секунд, также имеется автоматический предохранитель для защиты от короткого замыкания
Выходные разъемы
3 евророзетки: две с резервным питанием, третья — только фильтрация помех
Защита линий передачи данных
защита сети 10/100/1000 Base-T Ethernet, две розетки RJ-45
Интерфейс
USB
Размеры (Ш×Д×В)
102×350×148 мм
6,2 кг
менее 40 дБА
Условия работы
влажность 0—95% (без конденсации) температура от 0 до +40 °C
Описание на сайте производителя
PowerCom Phantom 600AP
Комплектация и гарантия
Комплект поставки:
инструкция по эксплуатации на русском языке
гарантийный талон
интерфейсный кабель USB
кабель для сети Ethernet с разъемами RJ-45
CD с программным обеспечением
Гарантийный срок эксплуатации: 2 года
Внешний вид
ИБП имеет классическую «башенную» компоновку, достаточно узкий корпус (10 см) и умеренный вес. Обращает на себя внимание черная передняя панель с единственной кнопкой включения по центру, которая при включении подсвечивается синим индикатором питания.
На задней панели имеются 3 стандартные евророзетки, что несомненно порадует домашних пользователей. Они хоть и занимают больше места на корпусе, чем розетки «компьютерного формата» IEC 320, но зато никаких проблем при подключении как самого компьютера, так и периферии не возникнет. Для взаимодействия с компьютерным ПО служит USB-интерфейс. Также имеются разъемы для защиты сетевого оборудования, подключаемого к сети Ethernet, и автоматический предохранитель.
Внутреннее устройство
Внутри корпуса обнаруживается минимум электронных компонентов, способ охлаждения пассивный, для чего силовые транзисторы прикручены к двум радиаторам (точнее: тепловым аккумуляторам). Соответственно, устройство практически бесшумное: как в пассивном режиме, так и при задействовании схем AVR и при работе от аккумуляторов, а также, что очень важно, и во время их заряда. Незначительный шум от самой электроники возникает лишь при работе с максимальной нагрузкой от батарей. Но этот режим, естественно, очень кратковременный, и даже тут шум с запасом укладывается в заявленные 40 дБА. Так что устройство 100-процентно домашнее.
Переключением между ступенями AVR-регулятора занимаются механические реле, рассчитанные на максимальный ток 7 А, что также означает солидный запас прочности. Инвертор построен на 4 транзисторах UTC UT108N03L производства компании Unisonic.
Трансформатор этому ИБП достался также достаточно адекватный, способный выдержать заявленную нагрузку.
Так выглядит фильтр импульсных помех в цепи передачи данных, имеется контакт с заземлением.
Батарея
Для замены аккумулятора пользователю придется отсоединить заднюю панель и разделить корпус самого ИБП на две половинки (в верхней находится электроника, а нижнюю занимает трансформатор и аккумулятор). В качестве аккумулятора компания PowerCom традиционно предпочитает изделия Yuasa. И этот выбор, надо сказать, достаточно неплохой из того, что есть сейчас на рынке.
В ИБП установлен аккумулятор модели NPW36-12 емкостью 7 А·ч, нормированной для режима 10-минутного разряда.
Тестирование
Работа от электросети
Мы использовали регулируемый автотрансформатор (ЛАТР), для того чтобы определить пороги переключения и фактическое напряжение на выходах при входном напряжении в диапазоне 0—263 В. Тестирование проводилось при полностью заряженном аккумуляторе и подключенной нагрузке около 100 Вт. Это типичное значение для современного компьютера в режиме простоя (или редактирования текста) с включенными опциями энергосбережения, учитывая, что значительную часть из этого потребляет включенный 20-дюймовый монитор.
Входное напряжение (при повышении от 0 до 263 В)
Выходное напряжение
Режим работы
223 В
от батарей
147—170 В
208—238 В
повышение (AVR 2 ст.)
171—208 В
198—236 В
повышение (AVR 1 ст.)
209—246 В
209—246 В
напрямую от сети
247—263 В
200—211 В
понижение (AVR)
Входное напряжение (при понижении от 263 до 0 В)
Выходное напряжение
Режим работы
263—246 В
212—198 В
понижение (AVR)
245—206 В
245—206 В
напрямую от сети
206—170 В
226—192 В
повышение (AVR 1 ст.)
169—134 В
236—190 В
повышение (AVR 2 ст.)
223 В
от батарей
Устройство отрабатывает как пониженное, так и повышенное напряжение в очень широком диапазоне без перехода на батарейное питание. Диапазон входного напряжения, при котором не требуется переход на батареи, составляет 134—263 В, при этом выходное напряжение держится в диапазоне 190—236 В. Формально, нижняя граница выходного напряжения слегка не соответствует заявленному отклонению в 5% от номинала. Но мне сложно представить современную (да и не очень) электронику, для которой напряжение 190 В являлось бы слишком низким для стабильной работы.
Скорость переключения между ступенями стабилизации и перехода на батарейное питание очень высока (в пределах заявленных 4 мс). Проблем при работе с устройствами, имеющими блок питания с активным PFC и поддерживающими широкий диапазон входного напряжения, зафиксировано не было.
Работа от батареи
При выходе напряжения из упомянутого диапазона ИБП переходит на аккумуляторное питание. Работа от батарей сопровождается звуковым сигналом умеренной громкости (50 дБА), раз в 5 секунд, а при исчерпании ресурса батареи — раз в секунду. Сигнализация отключается в настройках программного обеспечения и сохраняется в памяти устройства. В тихом режиме сигнализация остается лишь на случай перегрузки и полного исчерпания ресурса батареи — в таких случаях пользователь услышит либо непрерывный сигнал, либо частый прерывистый (с частотой раз в полсекунды).
Время работы от батарей при нагрузке 100 Вт составило 25 минут, при нагрузке 250 Вт (индикатор в ПО сообщил о 50%-ной нагрузке) время резервирования резко сократилось до 6 минут, а при полной нагрузке (410 Вт, индикатор указывает 108%, но устройство не сигнализирует о перегрузке и корректно работает) аккумулятор продержался всего 45 секунд, что, впрочем, вполне достаточно для корректного перевода компьютера в спящий режим.
Работа от батарей (при отсутствии нагрузки)
Работа в режиме понижения напряжения (на входе 250 В)
Работа в режиме повышения напряжения (1-я ступень, на входе 204 В)
Работа в режиме повышения напряжения (2-я ступень, на входе 150 В)
В любом случае на работоспособности цифрового оборудования помехи такого рода сказаться не могут.
Что касается режима автономной работы, то здесь никаких претензий нет. Форма аппроксимации остается корректной практически в любых режимах работы, даже при самой высокой нагрузке, ИБП отключается до того, как напряжение и форма могут «уплыть» за приемлемые границы. А при малой нагрузке форма напряжения вообще не меняется по мере разряда аккумулятора. Небольшие отклонения становятся заметны, только когда источник нагружен более чем на 50%. Ну а в трапецию форма напряжения превращается лишь в случае максимальной нагрузки в сочетании с практически севшей батареей. В целом — отличный результат для источника из этой ценовой категории.
Интерфейс и программное обеспечение
Источник совместим со стандартом Smart Battery, уровень заряда батареи корректно определяется штатными средствами операционной системы. Для управления и мониторинга служит комплектное ПО под названием UPSMon Plus.
Основные параметры демонстрируются в главном окне программы в наглядной форме.
Пользователь будет в курсе режима работы AVR, уровня заряда батареи, входной и выходной частоты.
Также пользователь может определить алгоритм работы при отключении питающей сети и задать выполнение определенных действий перед отключением.
Ну а главное — отключить звуковую сигнализацию или настроить ее таким образом, чтобы она не побеспокоила домашних в ночное время.
Существует функция ведения логов. Кстати, на этом экране продемонстрирован режим заряда аккумулятора после экспресс-разряда максимальным током. Набор емкости до 90% занимает чуть более 10 минут (исходно, после подачи питания, источник сигнализирует о заряде в 80%), а достижение уровня 100% потребовало заряда еще в течение 1 часа 20 минут. Да, это лишь подтверждает тот факт, что аккумуляторы, используемые в современных ИБП, изначально рассчитаны на длительный цикл разряда. А разрядка высоким током позволяет использовать лишь долю их реальной емкости.
В ПО имеются также и возможности, которые будут востребованы в основном при коммерческом применении — например, развитые функции удаленного мониторинга.
Выводы
Эту модель можно смело назвать отличным «домашним» ИБП, хотя, конечно же, и в офисе для защиты отдельно взятых рабочих мест она может послужить неплохо. Но главные достоинства модели — возможность работы в широком диапазоне входных напряжений, бесшумность, компактность — востребованы в первую очередь в бытовом использовании.
Наличие стандартных евророзеток также повышает удобство в быту — возможно, кто-то захочет использовать такой источник и для подключения домашнего кинотеатра или любой другой цифровой техники. Для аналоговой аппаратуры это устройство применять нежелательно по причине использования аппроксимированной (в режиме автономной работы) и просто неидеальной сетевой (в режиме AVR) синусоиды.
Достоинства:
компактность и бесшумность
соответствие (и даже превышение) заявленной максимальной мощности
широкий диапазон входных напряжений без перехода на батарейное питание
отключаемая звуковая сигнализация
поддержка стандарта Smart Battery
Недостатки:
неидеальная синусоида в режиме стабилизации напряжения
Средняя текущая цена (в скобках: количество предложений, на которое можно щелкнуть для перехода к списку доступных в московской рознице): Н/Д(0)
Понятие «аппроксимированная синусоида» обозначает форму выходного сигнала ИБП, условно приближенную к синусоидальной форме. В обозначениях производителей также встречаются наименования «модифицированная синусоида», «квази-синусоида» и другие. Форма сигнала аппроксимированной синусоиды может быть трапецеидальной или ступенчатой. Аппроксимированным считается сигнал, отличающийся по форме от синусоиды более чем на 8%. Эта разница называется коэффициентом нелинейных искажений.
Варианты применения источников питания с аппроксимированной синусоидой
Жмите для подписки на в Фейсбуке!
Достижение высокой степени приближения к графику синуса обозначает усложнение конструкции ИБП и увеличение его цены. Правильный сигнал выдают источники бесперебойного питания типа on-line (с двойным преобразованием тока), наиболее качественные off-line и line-interactive. В ряде случаев целесообразно использование менее дорогостоящих off-line или line-interactive моделей. Это справедливо для большинства бытовой электроники с импульсными блоками питания и приборов с активной нагрузкой: компьютеров и компьютерной периферии;
телевизионного и звукового оборудования;
кухонных приборов;
электрических обогревателей;
ламп накаливания и иных средств освещения.
Когда ИБП с аппроксимированной синусоидой применять нельзя?
Для устройств со значительной реактивной составляющей расходуемой мощности, индуктивной нагрузкой и для помеховосприимчивых приборов подойдёт только чистый сигнал. К таким устройствам относятся асинхронные двигатели и оборудование, содержащее их – насосы, отопительные котлы, трансформаторы и старая электроника с трансформаторными блоками питания. ИБП с модифицированной синусоидой генерируют помехи, дают низкий эффективный ток (среднее напряжение), превышение силы потребляемого тока.
На практике это означает, в лучшем случае, невозможность включения оборудования, в худших вариантах – нехватку мощности при возрастающей силе тока, перегрев, быстрый выход приборов из строя или значительное уменьшение жизненного цикла. У лучших линейно-интерактивных ИБП коэффициент искажений не превышает 3–5%, у источников с двойным преобразованием синусоида чистая – сигнал формируется инвертором заново.
В каталоге интернет-магазина 220 Volt имеются сотни моделей ИБП оффлайн, интерактивного и онлайн типов в широчайшем ценовом разнообразии. Если вы сомневаетесь в том, какой ИБП купить, – специалисты магазина ответят на все вопросы и помогут в выборе бесперебойника и другой электротехники.
Нажмите и читайте в Фейсбуке!
Валентин Володин
Вступление
Еще не стерлись из памяти события «лихих» 90-х. Помнится МММ, разгул криминала, веерные отключения электроэнергии. На Украине, например, во второй половине 90-х дело доходило до того, что свет в жилых районах выключали на 2 часа через каждые 2 часа. Помнится, наиболее коварным был зимний период темноты между пятью и семью часами вечера. Как раз, когда народ возвращался с работы. Выгружаешься на остановке, автобус уезжает, и ты остаешься в полной темноте. Пытаешься привыкнуть, трешь глаза, давишь на глазные яблоки. Все безрезультатно, вокруг полная темнота. Делать нечего, осторожно ступаешь во мраке, пытаясь нащупать заветный забор, который должен вывести к родной калитке и потихоньку, на ощупь, домой.
Однако в этих мытарствах были и положительные элементы. Например, резко возрос спрос на разные бензо- и дизель-генераторы, а также на электронные преобразователи и бесперебойные источники тока. Последнее обстоятельство позволило людям творческим применить свои профессиональные навыки и даже немного улучшить на этом поприще свое финансовое положение. А там, глядишь, появились различные фирмочки, выпускающие эти самые преобразователи и бесперебойники. Какой-никакой подъем в экономике образовался, дополнительные рабочие места и т. п. Собственно, и Ваш покорный слуга, примерно в те времена, из электроники слабосильной подался в электронику силовую.
Нельзя сказать, что тогда с этой самой электроникой сильно мудрили. Делали, чтобы было просто, надежно и дешево. В принципе, для того чтобы питать одну-две лампочки, больше ничего и не требовалось. Однако по мере развития процесса конкуренция ужесточалась. Народу уже стало из чего выбирать. Особо привередливые начали интересоваться формой напряжения на выходе преобразователей и бесперебойников. На что им очень обтекаемо отвечали, что форма там практически синусоидальная, но лишь слегка модифицированная. Более честные говорили, что там присутствует синусоида, но только квадратная. А уж совсем честные говорили напрямую, что их преобразователи и бесперебойники формируют на выходе прямоугольное напряжение с паузой. Но параметры этого напряжения (амплитудное и действующее значение, а также частота) практически соответствуют аналогичным параметрам однофазного переменного напряжения бытовой электросети. В принципе, такое напряжение вполне подходило для основных бытовых электропотребителей, таких телевизоры, компьютеры, а также накальные и люминесцентные лампы. Те же электропотребители, которые требовали чисто синусоидального напряжения (асинхронные двигатели, например), были в меньшинстве и погоды особой не делали.
Однако такое положение не могло длиться вечно. Количество отключений сокращалось и в какой-то момент они практически вообще прекратились. Однако параллельно на рынке бытовых товаров стали появляться отопительные котлы, оборудованные циркуляционными насосами, приводными задвижками и электронным управлением. Такие котлы требовали высококачественного бесперебойного электропитания. В противном случае, при отключении электричества работа системы отопления полностью нарушалась.
И вот тут возникала некая дилемма. Многие владельцы отопительного чуда уже обладали бесперебойными источниками, мощности которых с лихвой хватало для питания котла. Однако, вот беда, циркуляционные насосы ни в какую не хотели крутиться от «прямоугольной синусоиды». Для чудо-котла надо было приобретать новый чудо-бесперебойный источник, формирующий на выходе чистейшую синусоиду. А куда же теперь девать старый, к которому уже душой прикипели. Нехорошо как-то все это!
Но положение не безвыходное и старый друг нам еще послужит! Для питания асинхронного двигателя от прямоугольного напряжения можно использовать фильтр Отто. Есть множество положительных примеров практического воплощения такого подхода. Однако такой вариант не самый простой и, уж точно, не универсальный. После продолжительной и утомительной настройки фильтр можно будет использовать только с конкретным двигателем. Хотелось бы чего-то более универсального. Таким более универсальным решением будет использование в качестве фильтра феррорезонансного или подобного ему стабилизатора. При этом феррорезонансный стабилизатор, включенный после бесперебойного источника, будет не только исправлять форму его выходного напряжения в периоды отсутствия сети (работа от аккумулятора), но и будет стабилизировать напряжение сети в моменты его присутствия.
Ниже приводится описание и принципиальная электрическая схема феррорезонансного стабилизатора мощностью 1000 Вт. В статье приведены формулы и методика расчета, которая позволит вам пересчитать стабилизатор на другую мощность, если это потребуется.
Феррорезонансный стабилизатор
Феррорезонансные стабилизаторы имеют ряд достоинств, таких как высокая надежность и быстродействие, широкий диапазон входных напряжений, хорошая стабильность выходного напряжения, способность к исправлению формы сильно искаженного входного напряжения. Однако, не смотря на все свои достоинства, эти стабилизаторы имеют и некоторые недостатки, к которым можно отнести относительно низкую удельную мощность и высокий уровень шумов, создаваемых при работе.
Не так давно, в 60-80-х годах прошлого века, феррорезонансные стабилизаторы широко использовались в быту для питания ламповых телевизоров. И старшее поколение читателей, скорей всего, до сих пор помнит тот надрывный гул, которым сопровождалась работа этих аппаратов, которые различались формой и расцветкой, но имели вес 10-15 кг при мощности 250-350 Вт.
Основным источником шумов в феррорезонансном стабилизаторе является насыщающийся дроссель. В работе сердечник этого дросселя постоянно насыщается, что приводит к изменению его линейных размеров. Это явление называется магнитострикционным эффектом. О «шумности» этого эффекта говорит хотя бы тот факт, что он широко используется в гидроакустике для генерации мощных акустических волн. Следовательно, если мы хотим построить тихий стабилизатор, то в первую очередь должны избавиться от насыщающегося дросселя. Однако нельзя просто так выбрасывать неугодные комплектующие из стабилизатора. В этом случае мы рискуем потерять его функциональность. Чтобы этого не произошло, сначала нужно найти достойную замену. И на нашу удачу такая достоянная замена имеется. Еще в 70-х годах прошлого столетия была доказана возможность замены насыщающегося дросселя последовательной цепочкой, состоящей из линейного дросселя и двух встречно-параллельных тиристоров . Такая цепь ведет себя аналогично насыщающемуся дросселю, но в отличие от него имеет меньшие размеры и массу, может оперативно регулироваться за счет управления тиристорами, обеспечивает меньшие потери и, самое главное, гораздо меньше шумит. В технической литературе такая цепочка зачастую называется резонансным тиристорным регулятором (РТР) . При необходимости, два встречно-параллельных тиристора РТР можно с успехом заменить одним симистором.
Работа стабилизатора
Функциональная схема стабилизатора с РТР изображена на Рисунке 1.
Стабилизатор с РТР имеет практически тот же принцип действия, что и феррорезонансный стабилизатор. Выходное напряжение U Н поддерживается на требуемом уровне (220 В). Когда напряжение питающей сети U С имеет минимальное значение, симистор VS1 заперт. При этом напряжение U Н поднимается до требуемого уровня за счет резонанса в колебательном контуре L1C1. Если же напряжение питающей сети U С имеет максимально допустимое значение, то симистор VS1 постоянно открыт. При этом дроссели L1 и L2 образуют делитель переменного напряжения, уменьшающий сетевое напряжение до требуемого уровня. В феррорезонансном стабилизаторе насыщающийся дроссель также максимально используется при максимальном входном напряжении, и минимально при минимальном. Дроссель L3 совместно с конденсатором С1 образует фильтр третьей гармоники, улучшающий форму выходного напряжения стабилизатора.
Рассмотрим подробнее работу стабилизатора с РТР. На Рисунке 2 изображены осциллограммы основных напряжений и токов стабилизатора с РТР. Выходное напряжение стабилизатора U Н выпрямляется при помощи выпрямителя В2. Выпрямленное напряжение U В2 поступает на фильтр Ф, который выделяет из него среднее, действующее или амплитудное значение, в зависимости от того, какое значение выходного напряжения U Н требуется стабилизировать. Далее напряжение с выхода фильтра поступает на сумматор, где сравнивается с опорным напряжением U ОП. С выхода сумматора напряжение ошибки поступает на регулятор Рег, который формирует управляющий сигнал, призванный компенсировать отклонение выходного напряжения стабилизатора. Выходное напряжение регулятора U ПОР поступает на вход порогового устройства ПУ и определяет его порог срабатывания. На другой вход порогового устройства подается синхронизирующее напряжение U В1 , привязанное к моментам перехода через ноль выходного напряжения U Н стабилизатора. На выходе порогового устройства ПУ формируются импульсы управления U УПР, которые усиливаются усилителем мощности УМ и в требуемой полярности поступают на управляющий электрод симистора VS1. Синхронизирующее напряжение создается при помощи интегратора Инт и выпрямителя В1. Благодаря интегратору, импульсы выпрямленного напряжения U В1 отстают от импульсов U В2 на 5 мс (фазовый сдвиг -90°).
Импульсы управления U УПР формируются на нарастающем фронте U В1 между нулевым и амплитудным значением этого напряжения. При увеличении порогового напряжения U ПОР импульсы управления максимально сдвигаются к амплитудному значению U В1 и, соответственно, к нулевому значению U В2 . В этом случае симистор открывается в районе нулевого значения U Н и через линейный дроссель L2 протекает незначительный ток I L2 , который не оказывает существенного влияния на выходное напряжение стабилизатора. При уменьшении порогового напряжения Uпор импульс управления сдвигается в сторону амплитудного значения U Н и через линейный дроссель L2 начинает протекать существенный ток, который шунтирует выход стабилизатора и уменьшает величину его выходного напряжения.
Если выходное напряжение стабилизатора меньше требуемого, то регулятор Рег увеличивает пороговое напряжение U ПОР. В результате ток, протекающий через дроссель L2, уменьшается, и выходное напряжение стабилизатора возрастает за счет резонанса в колебательном контуре L1C1. Если выходное напряжение больше требуемого, то регулятор Рег уменьшает пороговое напряжение U ПОР. В результате ток, протекающий через дроссель L2, увеличивается и выходное напряжение стабилизатора уменьшается.
Расчет силовой схемы стабилизатора
Рассмотрим практическую методику расчета стабилизатора мощностью 1000 ВА. Такой стабилизатор может использоваться как независимое устройство или совместно с устаревшими источниками бесперебойного питания для получения синусоидальной формы напряжения.
Принципиальная электрическая схема силовых цепей стабилизатора с РТР мощностью S Н = 1000 ВА изображена на Рисунке 3. Стабилизатор рассчитан на работу от сети переменного тока 220 В 50 Гц c нагрузкой, имеющей коэффициент мощности cos φ Н ≥ 0.7, и формирует выходное напряжение U Н = 220 В ±1% во всем диапазоне нагрузок при изменении входного напряжения от 150 до 260 В.
Я думаю что с появлением мощных транзисторов все добросовестные производители должны были бы перейти на импульсные блоки питания.
Для импульсника вообще без разницы какая там форма входящего сигнала, он все равно первым делом превращает ее в постоянку.
Я бы вообще ввел стандарт для бытовой сети к примеру 12V постоянного тока. Это позволило бы унифицировать приборы для автомобилей и для дома, упростить подключение бесперебойников и альтернативных источников.
При этом вероятно все таки следует сохранить мощную высоковольтную сеть для передачи больших мощностей. Просто на входе в квартиру ставим один выпрямитель / преобразователь, отдельную подводку для плиты или кондиционера, а все остальное от 12V.
Однако я пока не видел ни одной микроволновки чтобы в ней не было громоздкого трансформатора весом ни как не меньше 5 кг.
Кстати, электродвигатели тоже можно было бы существенно уменьшить в размерах если бы питать их от высокочастотных преобразователей многофазным током.
Но похоже все дело в инерции мышления.
Инерция мышления? Вы представьте себе провода для утюга 3Квт при питании от 12 вольт! Проводку в квартирах вы собираетесь медной шиной прокладывать?! Если в среднем взять нормальное потребление квартиры на уровне 1,5 кВт, то при 12 вольтах в сети получаем всего-то 125 Ампер ток, что при норме 4,5 А/кв.мм. дает провод сечением 27 кв.мм. ничего себе, отсутствие инерции мышления!
Появятся, когда импульсники для микроволновки станут дешевле трансформатора. Когда-то и микроволновок не было. Про 12 вольтовую сеть уже писали. Хотелось бы, чтобы инерция мышления относительно этой идеи продолжалась как можно дольше.
Новое не значит лучшее. Идеальный стабилизатор или точней близкий можно создать на основе механического преобразователя эл.двигатель- генератор. 12 в. никто даже не будет рассматривать как бытовой стандарт. Как компромис существует стандарт 28 вольт. Импульсный блок питания сам большая проблема. Экономия в весе выливается в высокочастотные помехи и почти нерегулируемое напряжение на выходе.
=Незарегистрированный;150554]
Однако я пока не видел ни одной микроволновки чтобы в ней не было громоздкого трансформатора весом ни как не меньше 5 кг…Позвольте не согласиться-а инверторные модули м/в Панасоник?
Есть у панасоника микроволновки с высоковольтными импульсными блоками питания. На выходе удвоитель стоит – с 1.5 кВ до 3 повышает. Чуть магнетрон подседает диоды со свистом летят. А магнетрон специфический. Другим не заменишь и по цене проще новую купить. Помехи тоже имеются. А насчет 12 В на проводах разоришься. Такого типа феррорезонансные стабилизаторы хорошо работают.
То, что вы не видели, говорит только о том, как мало вы знаете…И СВЧ-печи, и кондиционеры, и холодильники уже давно придуманы, называются “инверторные”, используют выпрямленное сетевое напряжение и преобразователь…Правда пока цена высоковата…
Вместо философии нужно теорию хотя-бы немного читать.
В микроволновке трансформатор не понижающий а наоборот повышающий. Магнетрон от 12 вольт работать не будет.
Напряжение чем выше, тем меньше ток при той же передаваемой мощности, и соответственно меньше потери на тепловыделение в проводах, и меньше расход материала на их изготовление.
Высокое напряжение позволяет экономить на проводах, а то обстоятельство, что ток переменный, позволяет, для изменения напряжения, использовать простой, надежный и весьма эффективный элемент – трансформатор.
Купил инвертор типа на 2 квт. Работает но смущает что стали трещать автомат и некоторые лампы. Это из за пилы? Как ее сгладить?
Экспериментировал с дросселями и ёмкостями, добился нормальной синусоиды.
Но при изменении нагрузки меняется напряжение. Если постоянная нагрузка в каких то приделах то можно попробовать дросселями.
А схемку дадите?
В начале темы дана ссылка на статью, в которой описан способ решения проблемы формы и стабильности напряжения. Там же есть схема, перечень деталей и методика настройки.
Как получить чистую синусоиду из модифицированной. Часть 1
Как получить чистую синусоиду из модифицированной. Часть 2
Я эту схему брал за основу и подбирал дросселя.
Которая схема в этой теме не пробовал.
Будет время или прежмет отключение электро-энергии
тогда займусь.
Это фильтр Отто. Его имеет смысл использовать только с фиксированной нагрузкой. Например, для питания асинхронного двигателя.
Фильтр Отто
У меня нагрузка освещение, то есть переменная мощность.
Не устраивает:
лампы горят тусклее чем от сети (любые накаливания, светодиодные и ртутные)
трещит автомат и лампы некоторые.
Система управления двигателем гибридного транспортного средства и гибридное транспортное средство
Область техники, к которой относится изобретение
Настоящее изобретение в основном относится к способам и системам увеличения выходной мощности гибридного транспортного средства.
Уровень техники
Двигатели в гибридных транспортных средствах могут работать по циклу Аткинсона, что способствует более высокой экономии топлива по сравнению с работой по циклу Отто. При работе по циклу Аткинсона впускной клапан могут удерживать в открытом положении более длительное временя по сравнению с периодом открытого положения впускного клапана в течение цикла Отто. Ввиду более длительного открытия впускного клапана, эффективный коэффициент сжатия в цикле Аткинсона ниже, чем соответствующий коэффициент сжатия, достигаемый для цикла Отто. Для цикла Аткинсона, эффективный коэффициент расширения выше, чем коэффициент сжатия, что обеспечивает более высокую эффективность использования топлива. В связи с этим, мощность, переданная посредством работы двигателя по циклу Аткинсона, может быть меньше, чем мощность, переданная посредством работы двигателя по циклу Отто. В дополнение к этому, при работе двигателя по циклу Аткинсона может быть использовано топливо с пониженным октановым числом.
Были использованы различные подходы для работы двигателей транспортных средств по циклу Аткинсона. В одном из примеров подхода, представленного Кларком в патентном документе US 7765806, цикл Аткинсона использован в двигателе гибридного транспортного средства для увеличения эффективности использования топлива. В данном документе, для увеличения выходной мощности двигателя цикла Аткинсона во время повышения требования водителя, компрессор может быть использован для выборочного увеличения давления всасываемого воздуха и обеспечения желаемой мощности. Электромотор может быть использован для работы компрессора. Дополнительно, на основании желаемого требования мощности, электромотор в гибридном силовом агрегате может быть использован для приведения в движение транспортного средства и обеспечения желаемой мощности для эффективной работы транспортного средства.
Авторами настоящего изобретения определены потенциальные проблемы вышеупомянутого подхода. В качестве одного из примеров, посредством использования компрессора с электрическим приводом во время требований повышенной мощности, потребление энергии двигателя может увеличиться, что можно отнести к паразитным потерям мощности двигателя и/или к питанию аккумуляторной батареи, что снижает эффективность двигателя. Дополнительно, в условиях низкой степени заряженности аккумуляторной батареи, электромотор не может быть эффективно использован для вращения компрессора и/или приведения в движение транспортного средства. Авторами настоящего изобретения также определено, что даже с увеличением подачи всасываемого воздуха, выходной мощности двигателя, работающего по циклу Аткинсона, может быть недостаточно для удовлетворения требования водителя, что влияет на характеристики транспортного средства и увеличивает уровни шума, вибрации, жесткости (ШВЖ).
Сущность изобретения
В одном из примеров, проблемы, раскрытые выше, могут быть устранены посредством способа для гибридного транспортного средства, содержащего двигатель и электромотор, включающего в себя: в ответ на более низкий, чем пороговое значение, требуемый крутящий момент, и более низкую, чем пороговое значение, степень заряженности системной аккумуляторной батареи, работу двигателя с использованием цикла Аткинсона; и в ответ на более высокий, чем пороговое значение, требуемый крутящий момент, работу двигателя с использованием цикла Отто с добавлением во впрыскиваемое топливо присадки, повышающей октановое число. Таким образом, в ответ на увеличение требуемого водителем крутящего момента, посредством впрыска октановой добавки в топливо и посредством регулировки впускной фазы газораспределения для работы двигателя по циклу Отто, вместо цикла Аткинсона, может быть обеспечена желаемая мощность.
В качестве одного из примеров, в гибридном транспортном средстве, в условиях, когда мощность, желаемая для работы транспортного средства ниже, чем пороговое значение, и при невозможности использования электромотора для отбора желаемой мощности, например, когда заряд аккумуляторной батареи находится ниже, чем пороговое значение, двигатель транспортного средства может работать по циклу Аткинсона для обеспечения желаемой мощности. Во время работы по циклу Аткинсона, впускная фаза газораспределения может быть подходящим образом отрегулирована для обеспечения пониженного коэффициента сжатия компрессора. Топливо с более низким октановым числом может быть впрыснуто во время работы двигателя по циклу Аткинсона. Во время работы двигателя по циклу Аткинсона, аккумуляторная батарея электромотора может быть заряжена. Если желательна более высокая, чем пороговое значение, мощность, то впускная фаза газораспределения может быть отрегулирована для работы двигателя по циклу Отто. При работе по циклу Отто, двигатель может работать с повышенным коэффициентом сжатия компрессора для обеспечения более высокой выходной мощности. Для того, чтобы в дальнейшем облегчить работу двигателя по циклу Отто, присадка, повышающая октановое число, (добавка) может быть впрыснута в топливную систему для увеличения октанового числа в топливе, подводимом к цилиндрам для сгорания. Величина впрыскиваемой присадки, повышающей октановое число, может быть определена на основании текущего октанового числа относительно желаемого уровня мощности. Также, момент зажигания может быть отрегулирован для работы двигателя по циклу Отто, вместо цикла Аткинсона.
Таким образом, посредством своевременного впрыскивания присадки, повышающей октановое число, в топливную систему и регулировки впускной фазы газораспределения, двигатель может работать по циклу Отто для достижения требуемого повышенного крутящего момента во время работы гибридного транспортного средства. Посредством работы двигателя по циклу Аткинсона в условиях, когда желательна пониженная выходная мощность и/или при пониженной степени заряженности аккумуляторной батареи, эффективность использования топлива может быть улучшена и аккумуляторная батарея может быть заряжена. Технический эффект добавления присадки, повышающей октановое число, во впрыскиваемое топливо во время работы двигателя по циклу Отто заключается в том, что октановое число топлива может быть отрегулировано во время работы двигателя по циклу Отто, что способствует увеличению эффективной мощности двигателя с улучшением эффективности использования топлива. Таким образом, посредством рациональной работы двигателя транспортного средства по циклу Аткинсона и по циклу Отто, эффективность использования топлива может быть улучшена, и может быть обеспечена желаемая выходная мощность.
Следует понимать, что приведенная выше сущность изобретения предусмотрена для введения в упрощенном виде набора идей, которые подробно раскрыты в осуществлении изобретения. Это не означает, что данный раздел предназначен для определения ключевых или существенных признаков заявленного изобретения, объем которого однозначно определен пунктами формулы изобретения, которая следует за осуществлением изобретения. Более того, заявленное изобретение не ограничено реализациями, которые устраняют любые недостатки, отмеченные выше или в любой другой части данного раскрытия.
Краткое описание чертежей
На Фиг. 1 показан схематический чертеж примера системы обеспечения движения гибридного транспортного средства.
На Фиг. 2 показан схематический чертеж системы двигателя гибридного транспортного средства.
На Фиг. 3 показана схема работы, отображающая способ, который может быть реализован для увеличения выходной мощности и эффективности использования топлива гибридного транспортного средства.
На Фиг. 4 показан пример работы двигателя гибридного транспортного средства для обеспечения желаемой выходной мощности в соответствии с настоящим раскрытием.
Осуществление изобретения
Нижеследующее раскрытие относится к системам и способам увеличения выходной мощности гибридного транспортного средства. Пример системы транспортного средства с двигателем и мотором показан на Фиг. 1, а подробное раскрытие системы двигателя, содержащей топливную систему и систему присадки, повышающей октановое число, показано на Фиг. 2. Контроллер двигателя может быть выполнен с возможностью выполнения процедуры управления, например, примера процедуры, представленной на Фиг. 3, для регулирования работы двигателя для обеспечения желаемого выходного крутящего момента при повышении эффективности использования топлива. Пример работы двигателя для обеспечения желаемого выходного крутящего момента показан на Фиг. 4.
На Фиг. 1 представлен пример системы 100 обеспечения движения транспортного средства. Например, система 100 транспортного средства может быть гибридным электрическим транспортным средством или может быть встроена в гибридное электрическое транспортное средство. Однако, следует понимать, что, хотя на Фиг. 1 показана система гибридного транспортного средства, в других примерах, система 100 транспортного средства может не являться системой гибридного транспортного средства и может быть приведена в движение исключительно посредством двигателя 110.
Система 100 обеспечения движения транспортного средства содержит двигатель внутреннего сгорания 110 и мотор 120. В качестве неограничивающего примера, двигатель 110 содержит двигатель внутреннего сгорания, а мотор 120, содержит электромотор. Мотор 120 может быть выполнен с возможностью использования или потребления другого источника энергии, отличного от источника энергии двигателя 110. Например, двигатель 110 может быть выполнен с возможностью потребления жидкого топлива (например, бензина) для создания эффективной мощности двигателя, в то время как мотор 120 может быть выполнен с возможностью потребления электроэнергии для создания эффективной мощности мотора. В связи с этим, транспортное средство с системой 100 обеспечения движения может быть упомянуто в качестве гибридного электрического транспортного средства (ГЭТС). При том, что на Фиг. 1 представлено ГЭТС, данное раскрытие не является ограничивающим и следует понимать, что системы и способы, представленные в данном документе, могут быть применены к не ГЭТС, в пределах объема настоящего изобретения.
В некоторых примерах, система 100 обеспечения движения транспортного средства может использовать множество различных режимов работы в зависимости от условий работы, встречаемых в системе обеспечения движения транспортного средства. Некоторые из данных режимов могут позволить поддерживать двигатель 110 в отключенном состоянии (установить в отключенное состояние), в котором сгорание топлива в двигателе не происходит. Например, при выбранных условиях работы мотор 120 может приводить в движение транспортное средство через ведущее колесо 130, как показано указателем 122, в то время как двигатель 110 отключен.
В других условиях работы, двигатель 110 может быть установлен в отключенное состояние (как раскрыто выше) в то время, как мотор 120 может работать для подзарядки устройства 150 накопления энергии. Например, мотор 120 может получать крутящий момент на колесе от ведущего колеса 130, как показано указателем 122, причем мотор может быть выполнен с возможностью преобразования кинетической энергии транспортного средства в электрическую энергию для устройства 150 накопления энергии, как показано указателем 124. Данный режим работы может быть упомянут в качестве рекуперативного торможения транспортного средства. Так, в некоторых вариантах осуществления, мотор 120 может быть выполнен с возможностью обеспечения функции генератора. Однако, в других вариантах осуществления, генератор 160, наоборот, может быть выполнен с возможностью получения крутящего момента на колесе от ведущего колеса 130, причем генератор может быть выполнен с возможностью преобразования кинетической энергии транспортного средства в электрическую энергию для устройства 150 накопления энергии, как показано посредством указателя 162.
Также в других условиях работы, двигатель 110 может работать посредством сгорания топлива, полученного от топливной системы 140, как показано указателем 142. Например, двигатель 110 может работать для приведения в движение транспортного средства через ведущее колесо 130, как показано указателем 112, в то время, как мотор 120 отключен. В других условиях работы, двигатель 110 или мотор 120 могут работать для приведения в движение транспортного средства через ведущее колесо 130, как показано указателями 112 и 122, соответственно. Конфигурация, в которой двигатель и мотор могут выборочно приводить в движение транспортное средство, может быть упомянута как система обеспечения движения транспортного средства параллельного типа. Следует обратить внимание, что в некоторых вариантах осуществления, мотор 120 может быть выполнен с возможностью приведения в движение транспортного средства посредством первой установки ведущих колес, а двигатель 110 может быть выполнен с возможностью приведения в движение транспортного средства посредством второй установки ведущих колес.
В других вариантах осуществления, система 100 обеспечения движения транспортного средства может быть выполнена в качестве системы обеспечения движения транспортного средства последовательного типа, на основании чего двигатель не напрямую приводит в движение ведущие колеса. В некоторых случаях, двигатель 110 может быть выполнен с возможностью обеспечения энергией мотора 120, который, в свою очередь, приводит в движение транспортное средство через ведущее колесо 130, как показано указателем 122. Например, во время выбранных условий работы, двигатель 110 может приводить в движение генератор 160, который может, в свою очередь, снабжать электроэнергией мотор 120, как показано указателем 114, и/или устройство 150 накопления энергии, как показано посредством указателя 162. В качестве другого примера, двигатель 110 может работать для приведения в движение мотора 120, который может, в свою очередь, быть снабжен функцией генератора для преобразования мощности двигателя в электрическую энергию, причем электрическая энергия может быть запасена в устройстве 150 накопления энергии для использования ее позднее мотором.
Топливная система 140 может содержать один или более топливных баков 144 для хранения топлива, расположенного на борту транспортного средства. Например, топливный бак 144 может хранить один или более видов жидкого топлива, включающих в себя, но без ограничения: бензин, дизельное топливо, и спиртовое топливо. В некоторых примерах, топливо может храниться на борту транспортного средства как смесь из двух или более разных видов топлива. К примеру, топливный бак 144 может быть выполнен с возможностью хранения смеси из бензина и этанола (например, Е10, Е85, и т.д.) или смеси из бензина и метанола (например, М10, М85, и т.д.), таким образом эти виды топлива или виды смесей топлива могут быть доставлены к двигателю 110, как показано посредством указателя 142. Также другие подходящие виды топлива или виды смесей топлива могут быть доставлены к двигателю 110, причем они могут сгорать в двигателе для генерирования эффективной мощности двигателя. Система 146 присадки, повышающей октановое число, может быть соединена с топливной системой посредством трубопровода 147 присадки, повышающей октановое число. Система улавливания топливных паров (в данном документе также упомянута, как система улавливания топливных паров) может быть соединена с топливной системой 140.
Эффективная мощность двигателя может быть использована для приведения в движение транспортного средства, как показано указателем 112, или для перезарядки устройства 150 накопления энергии посредством мотора 120 или генератора 160. В случае более низкого, чем пороговое значение, требуемого крутящего момента, когда степень заряженности устройства 150 накопления энергии находится ниже пороговой величины, двигатель может работать, используя цикл Аткинсона, с пониженным коэффициентом сжатия, и при более высоком, чем пороговое значение, требуемом крутящем моменте, двигатель может работать с повышенным коэффициентом сжатия, используя цикл Отто. В качестве одного из примеров, система 146 присадки, повышающей октановое число, может содержать резервуар для хранения присадки, повышающей октановое число (жидкость), трубопровод 147 присадки, повышающей октановое число, насос, и инжектор для подачи желаемой величины присадки, повышающей октановое число, к топливопроводу, в ответ на сигнал от контроллера. Во время работы двигателя с использованием цикла Отто, октановое число топлива, впрыскиваемого в цилиндры для сгорания, может быть отрегулировано посредством выборочного впрыскивания необходимого количества присадки, повышающей октановое число, в топливную систему, например, в ответ на детонацию двигателя. Впрыскивание присадки, повышающей октановое число, может включать в себя впрыскивание присадки, повышающей октановое число, в топливопровод ниже по потоку от резервуара топлива и выше по потоку от топливного инжектора. Система может регулировать присадку, повышающую октановое число, со впрыском во время работы цикла Отто отличным по сравнению с двигателем цикла Аткинсона, в частности для различных уровней СЗ аккумуляторной батареи, температуры двигателя, температуры каталитического нейтрализатора, желаемого крутящего момента двигателя и других факторов. Дополнительно, особенности работы двигателя, использующего цикл Аткинсона и цикл Отто, раскрыты согласно Фиг. 3.
В некоторых вариантах осуществления, устройство 150 накопления энергии может быть выполнено с возможностью хранения электроэнергии, которая может быть подведена к другим электрическим нагрузкам, расположенным на борту транспортного средства (отличных от мотора), включающим в себя обогрев салона и кондиционирование воздуха, запуск двигателя, свет фар, аудио и видео системы салона и т.д. В качестве неограничивающего примера, устройство 150 накопления энергии может содержать одну или более аккумуляторных батарей и/или конденсаторов.
Система 190 управления может быть соединена с одним или более из следующего: двигателем 110, мотором 120, топливной системой 140, устройством 150 накопления энергии и генератором 160. Система 190 управления может получать данные посредством сигналов обратной связи от одного или более из следующих элементов: двигателя 110, мотора 120, топливной системы 140, системы 146 присадки, повышающей октановое число, устройства 150 накопления энергии, генератора 160, системы 193 глобального геопозиционирования (СГГ), расположенной на борту, и бортовых камер 195. Дополнительно к этому, система 190 управления может быть выполнена с возможностью отправки управляющих сигналов к одному или более из следующего: двигателю 110, мотору 120, топливной системе 140, системе 146 присадки, повышающей октановое число, устройству 150 накопления энергии, генератору 160, бортовым камерам 195, в ответ на данные сигналов обратной связи. Система 190 управления может быть выполнена с возможностью получения показаний оператора в ответ на выходной сигнал системы обеспечения движения транспортного средства от оператора 102 транспортного средства. Например, система 190 управления может быть выполнена с возможностью получения сигнала обратной связи от датчика 194 положения педали, который соединен с педалью 192. Педаль 192 может быть схематически отнесена к педали тормоза и/или педали акселератора.
Устройство 150 накопления энергии может быть выполнено с возможностью периодического получения электроэнергии от источника энергии 180, расположенного на внешней стороне транспортного средства (например, не являющегося частью транспортного средства), как показано указателем 184. В качестве неограничивающего примера, система 100 обеспечения движения транспортного средства может быть выполнена в качестве дополнительного элемента гибридного электрического транспортного средства (ГЭТС), тем самым электроэнергия может быть передана устройству 150 накопления энергии от источника 180 энергии посредством электрического кабеля 182 трансмиссии. Во время работы перезарядки устройства 150 накопления энергии от источника 180 энергии, кабель 182 трансмиссии может электрически соединять устройство 150 накопления энергии и источник 180 энергии. В то время, как система обеспечения движения работает для приведения в движение транспортного средства, электрический кабель 182 трансмиссии может быть отсоединен между источником 180 энергии и устройством 150 накопления энергии. Система 190 управления может определять и/или контролировать величину электроэнергии, хранимой на устройстве накопления энергии, которая может быть упомянута в качестве степени заряженности (СЗ).
В других вариантах осуществления, электрический кабель 182 трансмиссии может быть исключен, причем электрическая энергия может быть получена беспроводным способом на устройстве 150 накопления энергии от источника 180 электроэнергии. Например, устройство 150 накопления энергии может получать электрическую энергию от источника 180 электроэнергии посредством одного или более из следующего: электромагнитной индукции, радиоволн и электромагнитного резонанса. В связи с этим, следует понимать, что любой допустимый подход может быть использован для перезарядки устройства 150 накопления энергии от источника питания, который не является частью транспортного средства. Таким образом, электромотор 120 может приводить в движение транспортное средство, используя источник энергии, отличный от топлива, используемого двигателем 110.
Топливная система 140 выполнена с возможностью периодического получения топлива от источника топлива, находящегося вне транспортного средства. В качестве неограничивающего примера, система 100 обеспечения движения транспортного средства может быть заправлена топливом, посредством получения топлива через топливораздаточное устройство 170, как показано указателем 172. В некоторых вариантах осуществления, топливный бак 144 может быть выполнен с возможностью хранения топлива, полученного от топливораздаточного устройства 170, пока оно не будет подано в двигатель 110 для сгорания. В некоторых вариантах осуществления, система 190 управления выполнена с возможностью получения показаний уровня топлива, хранимого в топливном баке 144, посредством датчика уровня топлива. Уровень топлива, хранимого в топливном баке 144 (например, определенный посредством датчика уровня топлива), может быть передан оператору транспортного средства, например, с помощью указателя уровня топлива или отображения на приборной панели 196 транспортного средства.
Система 100 обеспечения движения транспортного средства может также содержать датчик 198 условий окружающей среды, например, для оценки температуры окружающей среды или влажности окружающей среды. Приборная панель 196 транспортного средства может содержать световой индикатор (индикаторы) и/или текстовый дисплей, на котором отображены сообщения оператору. Приборная панель 196 транспортного средства может также содержать различные входные блоки для получения входного сигнала оператора, например, кнопки, наборные диски, сенсорные экраны, голосовые входы/распознавание речи и т.д. В альтернативном варианте осуществления, приборная панель 196 транспортного средства может передавать аудиосообщения оператору без отображения. Данные устройства могут быть соединены с системой 190 управления.
На Фиг. 2 представлен пример варианта 200 осуществления камеры сгорания или цилиндра двигателя 10 внутреннего сгорания. Управление двигателем 10 по меньшей мере частично может быть осуществлено системой управления, содержащей контроллер 12, и посредством входного сигнала от оператора 230 транспортного средства через устройство 232 ввода. В данном примере, устройство 232 ввода содержит педаль акселератора и датчик 234 положения педали для формирования сигнала ПП, пропорционального положению педали. Требуемый крутящий момент (требуемый водителем) может быть определен из положения педали акселератора посредством входного сигнала от датчика 234 положения педали. На основании условий эксплуатации, двигатель может работать в соответствии с циклом Отто, либо циклом Аткинсона. Работа по циклу Отто включает в себя работу двигателя с повышенным коэффициентом сжатия, в то время, как работа по циклу Аткинсона включает в себя работу двигателя с пониженным коэффициентом сжатия. Например, в ответ на более низкое, чем пороговое значение, требование крутящего момента, и более низкое, чем пороговое значение, состояние заряда системной аккумуляторной батареи, двигатель может работать, используя цикл Аткинсона, и в ответ на более высокое, чем пороговое значение, требование крутящего момента, двигатель может работать, используя цикл Отто. Пороговое значение требуемого крутящего момента определяют на основании максимально допустимой мощности двигателя. Во время работы двигателя по циклу Аткинсона, аккумуляторная батарея электромотора может быть заряжена. Как только степень заряженности аккумуляторной батареи увеличена до степени, превышающей пороговое значение заряда, как электромотор, так и двигатель могут работать одновременно для обеспечения требования желаемого крутящего момента (например, как определено из положения педали и таблицы преобразования скорости транспортного средства для текущего передаточного коэффициента трансмиссии).
Цилиндр 14 (т.е. камера сгорания) двигателя 10 может содержать стенки 236 камеры сгорания с расположенным там поршнем 238. Поршень 238 может быть соединен с коленчатым валом 240 так, чтобы была возможность преобразования возвратно-поступательного движения поршня во вращательное движение коленчатого вала. Коленчатый вал 240 может быть соединен по меньшей мере с одним ведущим колесом пассажирского транспортного средства через систему трансмиссии. Также стартерный электромотор может быть соединен с коленчатым валом 240 посредством маховика для обеспечения запуска работы двигателя 10.
Цилиндр 14 может быть выполнен с возможностью получения всасываемого воздуха через ряд впускных воздушных каналов 242, 244 и 246. Впускной воздушный канал 246, в дополнение к цилиндру 14, может быть соединен и с другими цилиндрами двигателя 10. Впускной канал 244 может содержать дроссель 262, имеющий дроссельную заслонку 264. В данном конкретном примере, положение дроссельной заслонки 264 может быть изменено с помощью контроллера 12 посредством сигнала, подаваемого на электромотор или исполнительный механизм, входящий в состав дросселя 262, в конфигурации, которую обычно называют электронным управлением дросселем (ЭУД). Таким образом, дроссель 262 может быть регулируемым для изменения всасываемого воздуха, поступающего в камеру сгорания, а также в другие цилиндры двигателя. Расположение дроссельной заслонки 264 может быть передано на контроллер 12 посредством сигнала положения дроссельной заслонки (ПДЗ). Впускной воздушный канал 242 может содержать датчик температуры всасываемого воздуха (ТВВ) и датчик барометрического давления (БД). Датчиком ТВВ оценивают температуру всасываемого воздуха для использования в работе двигателя и подают сигнал на контроллер 12. Подобным образом, датчиком БД оценивают давление окружающей среды для работы двигателя и подают сигнал на контроллер 12. Впускной канал 242 может дополнительно содержать датчик массового расхода воздуха и датчик 222 давления воздуха в коллекторе для подачи соответствующих сигналов МРВ и ДВК контроллеру 12.
Датчик 228 отработавших газов показан соединенным с выхлопным каналом 248, расположенным выше по потоку от устройства 278 снижения токсичности выбросов. Датчик 228 может быть любым подходящим датчиком для определения показаний воздушно-топливного отношения (ВТО) отработавших газов, например, линейным датчиком содержания кислорода или универсальным датчиком содержания кислорода в отработавших газах (УДКОГ), двухрежимным датчиком содержания кислорода или датчиком КОГ, датчиком НКОГ (нагреваемым КОГ), датчиком оксидов азота, датчиком углеводородов, или датчиком монооксида углерода. Датчик содержания кислорода может быть использован для оценки ВТО всасываемого и отработавшего газа. На основании оценки ВТО можно регулировать рабочие параметры двигателя, например, подачу топлива.
Каждый цилиндр двигателя 10 может содержать один или более впускных клапанов и один или более выпускных клапанов. Например, показано, что цилиндр 14 содержит по меньшей мере один впускной тарельчатый клапан 250 и по меньшей мере один выпускной тарельчатый клапан 256, расположенные в верхней области цилиндра 14. В некоторых вариантах осуществления, каждый цилиндр двигателя 10, включая цилиндр 14, может содержать по меньшей мере два впускных тарельчатых клапана и по меньшей мере два выпускных тарельчатых клапана, расположенных в верхней области цилиндра.
Впускным клапаном 250 могут управлять посредством контроллера 12 через исполнительный механизм 252. Аналогичным образом, выпускным клапаном 256 могут управлять посредством контроллера 12 через исполнительный механизм 254. В некоторых условиях, контроллер 12 может изменять сигналы, подаваемые на исполнительные механизмы 252 и 254, для управления открытием и закрытием соответствующих впускных и выпускных клапанов. Положение впускного клапана 250 и выпускного клапана 256 может быть определено посредством соответствующих датчиков положения клапана (не показаны). Исполнительные механизмы клапанов могут являться приводами клапанов электроприводного типа или кулачкового типа, или их комбинацией. Установка фаз газораспределения впускного и выпускного клапанов может управляться одновременно или может быть использована любая возможная установка фаз кулачкового распределения, изменения фаз кулачкового распределения выхлопного кулачка, двойного независимого изменения фаз кулачкового распределения или фиксированная установка фаз кулачкового распределения. Каждая система кулачкового привода может содержать один или более кулачков и может быть выполнена с возможностью использования одного или более переключателей профиля кулачков (ППК), изменения фаз кулачкового распределения (ИФКР), изменения фаз газораспределения (ИФГ) и/или изменения высоты подъема клапанов (ИВПК), что может быть выполнено с возможностью управления посредством контроллера 12 для изменения работы клапана. Например, в качестве альтернативы, цилиндр 14 может содержать впускной клапан, управляемый посредством электропривода клапанов, и выхлопной клапан, управляемый посредством кулачкового привода, содержащего системы ППК и/или ИФКР. В других вариантах осуществления, впускной и выхлопной клапаны могут управляться посредством общего привода клапанов или системы привода, или привода или приводной системы изменения фаз газораспределения. Работа двигателя с использованием цикла Аткинсона включает в себя работу двигателя с первым коэффициентом сжатия и первой впускной фазой газораспределения, а работа двигателя с использованием цикла Отто включает в себя работу двигателя со вторым коэффициентом сжатия и второй впускной фазой газораспределения, причем первый коэффициент сжатия меньше, чем второй коэффициент сжатия, причем первая впускная фаза газораспределения длительнее, чем вторая впускная фаза газораспределения. Более длительная впускная фаза газораспределения включает в себя задержку закрытия впускного клапана после такта впуска.
В некоторых вариантах осуществления, каждый цилиндр двигателя 10 может содержать свечу 292 зажигания для инициирования горения. Система 290 зажигания может обеспечивать формирование искры зажигания в камере 14 сгорания посредством свечи 292 зажигания в ответ на сигнал опережения зажигания (ОЗ) от контроллера 12 при определенных режимах работы. Работа двигателя с использованием цикла Аткинсона дополнительно включает в себя работу с первым моментом зажигания, а работа двигателя с использованием цикла Отто дополнительно включает в себя работу со вторым моментом зажигания, причем второй момент зажигания опережает первый момент зажигания. В качестве альтернативы, второй момент зажигания может отставать относительно первого момента зажигания. Однако, в некоторых вариантах осуществления, свеча 292 зажигания может быть исключена, например, в случаях, когда двигатель 10 может инициировать зажигание посредством самовоспламенения или посредством впрыска топлива, что может иметь место в некоторых дизельных двигателях.
В некоторых вариантах осуществления, каждый цилиндр двигателя 10 может быть выполнен с одним или более топливным инжектором для подачи топлива в цилиндр. В качестве неограничивающего примера, цилиндр 14 показан содержащим два топливных инжектора 266 и 270. Топливный инжектор 266 показа соединенным непосредственно с цилиндром 14 для прямого впрыска топлива в цилиндр в количестве, пропорциональном сигналу ширины топливного импульса ШТИ-1, получаемого от контроллера 12 через электронный драйвер 268. Таким образом, топливный инжектор 266 обеспечивает так называемый прямой впрыск топлива в цилиндр 14 сгорания. Хотя инжектор 266 показан на Фиг. 1 в качестве бокового инжектора, он может также быть расположен и над поршнем, например, вблизи расположения свечи 292 зажигания. Такое расположение может улучшить процесс смешивания и сгорания, когда двигатель работает на спиртосодержащем топливе, поскольку некоторые разновидности спиртосодержащего топлива обладают пониженной летучестью. С другой стороны, инжектор может быть расположен над поршнем и вблизи впускного клапана для улучшения смешивания. Топливо может быть передано к топливному инжектору 266 от топливной системы 272 высокого давления, содержащей топливный бак, топливные насосы, топливную рампу и драйвер 268. В качестве альтернативы, доставка топлива может быть осуществлена посредством одноступенчатого топливного насоса при более низком давлении, в таком случае установка фаз прямого впрыска топлива может быть более ограниченной на такте сжатия, чем в случае использования топливной системы высокого давления. Кроме того, хотя это и не показано, топливный бак может содержать датчик давления, обеспечивающий сигнал для контроллера 12.
Топливный инжектор 270 показан расположенным во впускном канале 246, а не в цилиндре 14, в конфигурации, которая обеспечивает так называемый впрыск топлива во впускные каналы, расположенные выше по потоку от цилиндра 14. Топливный инжектор 270 может быть выполнен с возможностью впрыска топлива пропорционально сигналу ширины топливного импульса ШТИ-2, полученного от контроллера 12 через электронный драйвер 271. Топливо может быть передано в топливный инжектор 270 посредством топливной системы 272.
В течение одного цикла цилиндра топливо может быть передано посредством двух инжекторов в цилиндр. Например, каждый инжектор может подавать часть от общего впрыска топлива, которая сжигается в цилиндре 14. Кроме того, распределенное и/или относительное количество топлива, подаваемого от каждого инжектора, может изменяться в зависимости от условий работы, например, нагрузки на двигатель и/или детонации, например, как раскрыто ниже в данном документе.
Топливные инжекторы 166 и 170 могут иметь различные характеристики. Они могут включать в себя различия в размере, например, один инжектор может иметь большее отверстие для впрыска, чем другой. Другие отличия включают в себя, но не ограничены этим, различные углы распыления, различные рабочие температуры, различные траектории, различные моменты впрыска, различные характеристики распыления, различные местоположения и т.д. Более того, в зависимости от коэффициента распределения впрыска топлива между инжекторами 270 и 266 могут быть достигнуты различные эффекты.
Топливный бак в топливной системе 272 может содержать разновидности топлива, обладающие различными свойствами, например, различным составом. Данные различия могут заключаться в различном содержании спирта, различном октановом числе, различной теплоте парообразования, различном сочетании компонентов и/или в комбинации указанных свойств. В одном из примеров, топливо из нескольких баков, каждый из которых содержит топливо с различным октановым числом, может одновременно быть подано к топливным инжекторам 270 и 266 для сгорания. В другом примере, топливный бак 272 может иметь отдельные отсеки с топливом с различным октановым числом, и один или более типов топлива могут одновременно быть впрыснуты для сгорания.
Система 280 присадки, повышающей октановое число, может быть соединена с топливной системой 272 для впрыска измеренных количеств присадки, повышающей октановое число, в топливную систему во время работы двигателя с использованием цикла Отто. Система добавления присадки, повышающей октановое число, может содержать резервуар 280 присадки, повышающей октановое число, один или более насосов 284 присадки, повышающей октановое число, трубопровод 287 присадки, повышающей октановое число, и инжектор 287 присадки, повышающей октановое число. При пониженном требуемом крутящем моменте двигателя, двигатель может работать с использованием цикла Аткинсона для увеличения эффективности использования топлива (ввиду меньшего коэффициента сжатия). Для работы двигателя с использованием цикла Аткинсона, топливо с пониженным октановым числом может быть использовано для сгорания. Вследствие этого, во время такой работы двигателя может быть нежелателен впрыск присадки, повышающей октановое число. Однако, при более высоком требуемом крутящем моменте двигателя, двигатель может работать с использованием цикла Отто для увеличения выходного крутящего момента двигателя (ввиду повышенного коэффициента сжатия). Для работы двигателя с использованием цикла Отто может быть необходимо топливо с повышенным октановым числом. Для увеличения октанового числа в сгораемом топливе в топливную систему может быть введена присадка, повышающая октановое число. В одном из примеров, дозированное количество присадки, повышающей октановое число, может быть впрыснуто в топливопровод посредством инжектора 287 присадки, повышающей октановое число. В одном из примеров, количество впрыскиваемой присадки, повышающей октановое число, может быть основано на октановом числе впрыскиваемого топлива, причем количество увеличивают при уменьшении октанового числа впрыскиваемого топлива. Количество впрыскиваемой присадки, повышающей октановое число, может быть дополнительно основано на разности между фактическим требуемым крутящим моментом и пороговым требуемым крутящим моментом, причем количество увеличивают при увеличении данной разности. Подробное раскрытие работы двигателя с использованием цикла Аткинсона и цикла Отто представлено на Фиг. 3. Таким образом, отдельный топливный бак может быть использован для хранения топлива, и топливо с различными октановыми числами может быть своевременно впрыснуто с использованием октановой добавки на основании работы двигателя.
Устройство 278 снижения токсичности отработавших газов показано расположенным вдоль выхлопного канала 248 ниже по потоку от датчика 228 отработавших газов. Устройство 278 снижения токсичности отработавших газов может представлять собой трехкомпонентный каталитический нейтрализатор, уловитель NOx, различные другие устройства снижения токсичности отработавших газов, или сочетание вышеупомянутых устройств.
Контроллер 12 показан на Фиг. 2 в качестве микрокомпьютера, содержащего микропроцессорное устройство 206, порты 208 ввода/вывода, электронное устройство хранения данных для исполняемых программ и калибровочных значений, показанное в качестве микросхемы 210 постоянного запоминающего устройства в данном конкретном примере, оперативное запоминающее устройство 212, энергонезависимую память 214 и шину данных. Контроллер 12 может принимать различные сигналы от датчиков, соединенных с двигателем 10, в дополнение к сигналам, рассмотренным ранее, содержащие значение измерения требуемого водителем крутящего момента от датчика 234 положения педали, массового расхода всасываемого воздуха (МРВ) от датчика 222 массового расхода воздуха; температуру хладагента двигателя (ТХД) от датчика 216 температуры, соединенного с охлаждающей рубашкой 218; сигнал о положении двигателя (СПД) от датчика 220 на эффекте Холла (или датчика другого типа), положения дроссельной заслонки (ПДЗ) от датчика положения дроссельной заслонки, и сигнал абсолютного давления коллектора (АДК) от датчика 224. Сигнал частоты вращения двигателя (ЧВД), может быть сгенерирован посредством контроллера 12 из сигнала СПД. Сигнал АДК давления в коллекторе от датчика давления в коллекторе может быть использован для обеспечения показаний вакуума, или давления во впускном коллекторе.
Контроллер 12 может быть выполнен с возможностью получения сигналов от различных датчиков, представленных на Фиг. 1 и Фиг. 2, и использования различных исполнительных механизмов, представленных на Фиг. 1 и Фиг. 2, для регулировки работы двигателя на основании полученных сигналов и инструкций, хранимых в памяти контроллера 12. В одном из примеров, контроллер 12 может быть выполнен с возможностью оценки требуемого крутящего момента на основании входного сигнала от датчика 234 положения педали и на основании более низкого, чем пороговое значение, крутящего момента, и более низкого, чем пороговое значение, уровня заряженности аккумуляторной батареи (электромотора в гибридном транспортном средстве), причем контроллер может быть выполнен с возможностью отправки сигнала к одному или более исполнительным механизмам двигателя для работы двигателя по циклу Аткинсона. В качестве примера, для работы двигателя по циклу Аткинсона, контроллер 12 может посылать сигнал к исполнительному механизму 252, соединенному с впускным клапаном, для увеличения периода открытия впускного клапана во время такта впуска. Если оценка крутящего момента выше порогового значения, то контроллер может послать сигнал к одному или более исполнительным механизмам двигателя для работы двигателя по циклу Отто. В качестве примера, для работы двигателя по циклу Отто, контроллер 12 может посылать сигнал к исполнительному механизму 252, соединенному с впускным клапаном, для уменьшения периода открытия впускного клапана во время такта впуска. Также, контроллер 12 может посылать сигнал ширины импульса к инжектору 287 присадки, повышающей октановое число, для впрыска желаемой величины присадки, повышающей октановое число, в топливопровод, передающий топливо к цилиндрам для сгорания.
Таким образом, в системах, представленных на Фиг. 1 и Фиг. 2, предусмотрена система для гибридного транспортного средства, содержащая: электромотор с аккумуляторной батареей, двигатель с множеством цилиндров, педаль акселератора с датчиком положения педали, впускной клапан, выхлопной клапан и свеча зажигания для каждого из цилиндров, топливную систему, содержащую топливный бак, топливный насос, топливопровод и топливный инжектор, систему добавления присадки, повышающей октановое число, содержащую трубопровод присадки, повышающей октановое число, и инжектор присадки, повышающей октановое число, соединенный с топливопроводом, и контроллер с машиночитаемыми инструкциями, хранимыми в долговременной памяти, для: определения более высокого, чем пороговое значение, требования крутящего момента на основании входного сигнала от датчика положения педали, и, в ответ на более высокое, чем пороговое значение, требование крутящего момента, приведения в действие инжектора присадки, повышающей октановое число, для впрыскивания некоторого количества присадки, повышающей октановое число, в топливопровод, и работу двигателя с повышенным коэффициентом сжатия, более короткой впускной фазой газораспределения и более поздним моментом зажигания.
На Фиг. 3 представлен пример способа 300, который может быть реализован для регулировки работы двигателя для обеспечения желаемого выходного крутящего момента, при одновременном увеличении эффективности использования топлива. Инструкции для осуществления способа 300 и остальных способов, включенных в настоящее раскрытие, могут быть выполнены при помощи контроллера на основании инструкций, хранимых в памяти контроллера, и в сочетании с сигналами, полученными от датчиков системы двигателя, например, датчиков, раскрытых выше со ссылкой на Фиг. 1-2. Контроллер может быть выполнен с возможностью использования исполнительных механизмов двигателя системы двигателя для регулировки работы двигателя, в соответствии со способами, раскрытыми ниже.
На шаге 302, процедура включает в себя оценку и/или измерение текущих условий работы транспортного средства. Оцениваемые условия могут включать в себя, например, степень заряженности аккумуляторной батареи, соединенной с электромотором, требуемый крутящий момент водителя, температуру двигателя, нагрузку двигателя, частоту вращения двигателя, положение дроссельной заслонки, давление отработавших газов, воздушно-топливное отношение отработавших газов и т.д. Также, октановое число топлива, в данный момент доступного для сгорания, может быть определено посредством датчика топлива. В одном из примеров, датчик топлива может содержать датчик содержания спирта.
На шаге 304 процедура включает в себя определение того, превышает ли желаемый требуемый крутящий момент (мощность) пороговое значение крутящего момента. Оценка требуемого крутящего момента может быть основана на положении педали акселератора. При увеличении положения педали акселератора может соответственно увеличиваться требуемый крутящий момент. В одном из примеров, контроллер может определять положение педали акселератора на основании входного сигнала от датчика, связанного с педалью акселератора. Пороговое значение требуемого крутящего момента может быть основано на максимальной эффективной мощности двигателя. В качестве примера, пороговое значение крутящего момента может соответствовать 85% максимальной эффективной мощности двигателя.
Если определено, что требуемый крутящий момент ниже порогового значения, на шаге 306 процедура включает в себя определение того, превышает ли степень заряженности аккумуляторной батареи (СЗ) пороговый заряд. Пороговый заряд может соответствовать степени заряженности, требуемой для работы транспортного средства и обеспечения желаемого крутящего момента, посредством работы электромотора, соединенного с аккумуляторной батареей (то есть, посредством работы гибридного транспортного средства в электрическом режиме). Если определено, что степень заряженности аккумуляторной батареи достаточна для обеспечения желаемого крутящего момента, на шаге 308 двигатель может быть отключен, и транспортное средство может работать, используя электромотор.
Однако, если определено, что степень заряженности аккумуляторной батареи недостаточна для обеспечения желаемого крутящего момента, на шаге 310, двигатель транспортного средства может работать, используя цикла Аткинсона. Так, транспортное средство может быть переведено в режим двигателя и работать по циклу Аткинсона. В одном из примеров, транспортное средство может быть приведено в движение с использованием крутящего момента мотора, поступающего от электромотора во время меньшего, чем пороговое значение, требуемого крутящего момента, и в ответ на падение степени заряженности аккумуляторной батареи системы, работа транспортного средства переходит к приведению в движение транспортного средства с использованием крутящего момента двигателя с работой двигателя с пониженным коэффициентом сжатия. Коэффициент сжатия в цикле Аткинсона ниже, чем коэффициент расширения, что обеспечивает повышенную эффективность использования топлива. В одном из примеров, во время работы двигателя с использованием цикла Аткинсона коэффициент сжатия может составлять 10:1.
Работа двигателя с использованием цикла Аткинсона включает в себя, на шаге 311, впрыскивание топлива из топливного бака, в исходном состоянии, для сжигания. Таким образом, впрыскиваемое топливо может являться топливом с более низким октановым числом, которое по умолчанию доступно в топливном баке. В частности, работа двигателя с топливом с пониженным октановым числом не включает в себя добавление присадки, повышающей октановое число, в топливопровод. Поскольку добавление октановой добавки не требуется во время работы двигателя с использованием цикла Аткинсона, работа двигателя по циклу Аткинсона может быть экономически эффективной. Работа двигателя с использованием цикла Аткинсона дополнительно включает в себя, на шаге 312, смещение впускной фазы газораспределения текущего события сгорания до фазы газораспределения цикла Аткинсона. Контроллер может быть выполнен с возможностью отправки сигнала к исполнительному механизму, соединенному с впускным клапаном для удержания впускного клапана открытым в течение более длительного времени. В одном из примеров, во время цикла Аткинсона впускной клапан может быть удержан открытым в течение такта впуска и части такта сжатия. Также, для работы двигателя с использованием цикла Аткинсона, на шаге 313, момент зажигания текущего события сгорания может быть отрегулирован к моменту зажигания цикла Аткинсона. В одном из примеров, контроллер может быть выполнен с возможностью отправки сигнала к свече зажигания для замедления момента зажигания во время данной работы двигателя. В другом примере, контроллер может быть выполнен с возможностью отправки сигнала к свече зажигания для ускорения момента зажигания во время работы двигателя с использованием цикла Аткинсона.
На шаге 318, во время работы двигателя по циклу Аткинсона аккумуляторная батарея электромотора может быть заряжена. При более низком, чем пороговое значение, требуемом крутящем моменте двигателя, когда степень заряженности аккумуляторной батареи увеличена выше порогового заряда, как электромотор, так и двигатель могут работать (пока двигатель работает по циклу Аткинсона) одновременно для обеспечения требуемого крутящего момента.
Однако, если определено (на шаге 304), что требуемый крутящий момент выше, чем пороговое значение, может быть выявлено, что транспортное средство не может быть приведено в движение с использованием крутящего момента мотора от электромотора или крутящего момента двигателя от двигателя, работающего по циклу Аткинсона. В одном из примеров, транспортное средство может быть приведено в движение с использованием крутящего момента двигателя от электромотора при более низком, чем пороговое значение, требуемом крутящем моменте и в ответ на увеличение требуемого крутящего момента двигателя выше порогового значения требуемого крутящего момента, работа транспортного средства переходит к приведению в движение транспортного средства с использованием крутящего момента двигателя при работе двигателя с повышенным коэффициентом сжатия. Вследствие этого, для создания требуемого крутящего момента, на шаге 314, двигатель может работать с использованием цикла Отто. Коэффициент сжатия в цикле Отто выше, чем коэффициент расширения, что тем самым обеспечивает повышенный выходной крутящий момент. В одном из примеров, при работе двигателя с использованием цикла Отто коэффициент сжатия может составлять 12:1. Для достижения повышенного выходного крутящего момента посредством работы двигателя с использованием цикла Отто, топливо с повышенным октановым числом может быть впрыснуто для сгорания. Впрыск топлива с повышенным октановым числом включает в себя, на шаге 315, перед впрыском топлива, добавление некоторого количества присадки, повышающей октановое число из резервуара присадки, повышающей октановое число в топливопровод посредством инжектора присадки, повышающей октановое число. Количество впрыскиваемой присадки, повышающей октановое число, может быть основано на октановом числе топлива, доступного в топливном баке, и желаемом выходном крутящем моменте. В одном из примеров, текущий (увеличенный) требуемый крутящий момент может сравниваться с пороговым значением требуемого крутящего момента, причем может быть вычислена разность между повышенным требуемым крутящим моментом и пороговым значением крутящего момента, и количество впрыскиваемой присадки, повышающей октановое число, в топливопровод может быть отрегулировано на основании разности между повышенным требуемым крутящим моментом и пороговым значение требуемого крутящего момента. Регулировка может включать в себя увеличение количества присадки, повышающей октановое число, добавляемой в топливопровод по мере увеличения данной разности. Данная регулировка количества присадки, повышающей октановое число, впрыскиваемой в топливопровод, может быть дополнительно основана на октановом числе топлива, причем увеличение количества происходит по мере снижения октанового числа. Контроллер может быть выполнен с возможностью отправки сигнала, например, ширины импульса, к инжектору присадки, повышающей октановое число, для впрыска желаемой порции присадки, повышающей октановое число. Присадка, повышающая октановое число, может увеличить октановое число топлива, впрыскиваемого в цилиндры для сгорания, и увеличение октанового числа может в результате повысить выходной крутящий момент.
Работа двигателя с использованием цикла Отто дополнительно включает в себя, на шаге 316, смещение впускной фазы газораспределения для события сгорания к фазе газораспределения цикла Отто. Контроллер может быть выполнен с возможностью отправки сигнала к исполнительному механизму, соединенному с впускным клапаном для удержания впускного клапана открытым в течение более короткого периода, например, только в течение такта впуска. Работа двигателя с использованием цикла Отто дополнительно включает в себя, на шаге 317, регулировку момента зажигания для события сгорания для момента зажигания цикла Отто. В одном из примеров, контроллер может быть выполнен с возможностью отправки сигнала к свече зажигания для того, чтобы больше не применять позднее зажигание во время такой работы двигателя. В другом примере, может быть использован поздний момент зажигания во время работы двигателя с использованием цикла Отто.
Далее процедура переходит на шаг 318, и в течение работы двигателя по циклу Отто, аккумуляторная батарея электромотора может быть заряжена. После удовлетворения требования мощности двигателя для работы транспортного средства, любая избыточная мощность, производимая двигателем, может быть использована для зарядки системной аккумуляторной батареи. Таким образом, двигатель может в нужное время работать по циклу Аткинсона и циклу Отто для увеличения эффективности использования топлива и заряда аккумуляторной батареи электромотора.
Таким образом, способ для гибридного транспортного средства включает в себя: приведение в движение транспортного средства с использованием крутящего момента двигателя посредством впрыска топлива с пониженным октановым числом в двигатель, работающий с пониженным коэффициентом сжатия, более длительной впускной фазой газораспределения и первым моментом зажигания, и в ответ на увеличение в требуемом крутящем моменте до превышения порогового значения крутящего момента, переход к приведению в движение транспортного средства с использованием крутящего момента двигателя посредством впрыска топлива с повышенным октановым числом в двигатель, работающий с более высоким коэффициентом сжатия, более короткой впускной фазой газораспределения и вторым моментом зажигания повышенным, относительно первого момента зажигания. При этом топливо с пониженным октановым числом и топливо с повышенным октановым числом содержат одно и то же базовое топливо, причем топливо с повышенным октановым числом производят посредством добавления присадки, повышающей октановое число, в базовое топливо, тогда как топливо с пониженным октановым числом образуется посредством отсутствия добавления присадки, повышающей октановое число, в базовое топливо.
На Фиг. 4 показан пример последовательности 400 операций, представляющий регулирование рабочих параметров двигателя для обеспечения желаемого выходного крутящего момента при увеличении эффективности использования топлива. Горизонтальной осью (осью х) обозначено время, а вертикальными отметками t1-t6 обозначены основные моменты времени в работе транспортного средства.
На первом графике, кривой 402 показано изменение положения педали акселератора (требование водителя) со временем. На втором графике, кривой 404 показан желаемый выходной крутящий момент двигателя транспортного средства. Требуемый крутящий момент может быть оценен на основании положения педали. Пунктирной линией 405 показано пороговое значение крутящего момента двигателя. Когда желаемый крутящий момент двигателя ниже порогового крутящего момента, двигатель может работать с пониженным коэффициентом сжатия посредством цикла Аткинсона для увеличения экономии топлива, и, когда желаемый крутящий момент двигателя увеличен выше порогового крутящего момента, двигатель может работать с использованием повышенного коэффициента сжатия посредством цикла Отто для обеспечения желаемого крутящего момента. На третьем графике, кривой 406 показан коэффициент сжатия цилиндров во время работы двигателя транспортного средства в различных циклах. На четвертом графике, кривой 408 показано добавление присадки, повышающей октановое число, в топливную систему. Кривыми 409 и 410 обозначены количества присадки, повышающей октановое число, добавляемые в топливо между различными временными интервалами. На пятом графике, кривой 412 показана ширина импульса, представляющего продолжительность открытия впускного клапана во время работы двигателя. На шестом графике, кривой 414 показано степень заряженности аккумуляторной батареи (СЗ), питающей электромотор, используемый для приведения в движение транспортного средства. Пунктирной линией 415 показано пороговое значение СЗ аккумуляторной батареи, ниже которого транспортное средство больше не может быть приведено в движение только при использовании электромотора. На седьмом графике, кривой 416 показана работа двигателя с использованием цикла Аткинсона, и на седьмом графике, кривой 418, показана работа двигателя с использованием цикла Отто.
До момента времени t1 двигатель транспортного средства может не работать, и транспортное средство может быть приведено в движение с использованием крутящего момента электромотора. В течение данного времени, поскольку энергию от аккумуляторной батареи, подводящей питание к электромотору, используют для работы транспортного средства, степень заряженности аккумуляторной батареи (СЗ) может быть уменьшаться монотонно.
В момент времени t2 СЗ аккумуляторной батареи может быть уменьшена ниже порогового значения СЗ, и электромотор больше не может быть использован для приведения в движение транспортного средства. В ответ на уменьшение СЗ аккумуляторной батареи, пуск двигателя транспортного средства может происходить после периода бездействия. Между моментами времени t1 и t2 положение педали находится ниже порогового значения, и соответствующий требуемый крутящий момент двигателя может быть ниже порогового уровня. Вследствие этого, для работы двигателя при эффективном использовании топлива, в момент времени t2, двигатель работает с использованием цикла Аткинсона, посредством регулировки впускной фазы газораспределения для удержания впускных клапанов открытыми более продолжительное время (большая ширина импульса). Во время работы с использованием цикла Аткинсона коэффициент сжатия может быть ниже, что приводит к повышению эффективности использования топлива. Во время работы двигателя по циклу Аткинсона СЗ аккумуляторной батареи может оставаться неизменной, так как аккумуляторную батарею не используют для подачи питания для приведения в движение транспортного средства, и также аккумуляторная батарея не может быть существенно заряжена во время работы двигателя с использованием цикла Аткинсона. В качестве альтернативы, аккумуляторная батарея может быть своевременно заряжена во время работы двигателя с использованием цикла Аткинсона.
В момент времени t2 положение педали может быть увеличено выше порогового значения положения, и, соответственно, требуемый крутящий момент двигателя может также быть увеличен выше порогового значения. В ответ на увеличение желаемого выходного крутящего момента, двигатель может быть переключен на работу с использованием цикла Отто. Между моментами времени t2 и t3, для работы двигателя с использованием цикла Отто, впускная фаза газораспределения может быть отрегулирована для удержания впускного клапана открытым на более короткие промежутки времени (меньшая ширина импульса). Во время работы с использованием цикла Отто присадка, повышающая октановое число, может быть введена в топливопровод. Присадка, повышающая октановое число, может увеличить октановое число топлива, впрыскиваемого в цилиндры для сгорания, и увеличение октанового числа может в результате повысить выходной крутящий момент. Впрыск данного количества присадки, повышающей октановое число, в топливопровод включает в себя впрыск присадки, повышающей октановое число, из резервуара присадки, повышающей октановое число, в топливопровод посредством трубопровода присадки, повышающей октановое число, насоса присадки, повышающей октановое число и инжектора присадки, повышающей октановое число. Количество впрыскиваемой присадки, повышающей октановое число (как показано посредством кривой 409) увеличивают по мере увеличения разности между требуемым крутящим моментом и увеличением порогового значения крутящего момента, причем количество дополнительно увеличивают при уменьшении в топливном баке доступной присадки, повышающей октановое число. Во время работы двигателя по циклу Отто, мощность двигателя, доступная после обеспечения желаемого крутящего момента двигателя, может быть использована для зарядки аккумуляторной батареи, питающей электромотор, вследствие этого можно наблюдать увеличение СЗ аккумуляторной батареи.
В момент времени t3, положение педали может быть уменьшено ниже порогового положения, и, следовательно, требуемый крутящий момент двигателя может быть также уменьшен ниже порогового значения. Ввиду пониженного требуемого крутящего момента, между моментами времени t3 и t4, двигатель может работать с использованием цикла Аткинсона для повышения эффективности использования топлива. Для перехода от работы двигателя с использованием цикла Отто к работе двигателя с использованием цикла Аткинсона впускная фаза газораспределения может быть отрегулирована для увеличения периода времени открытия впускного клапана. Также, инжектор присадки, повышающей октановое число, может быть отключен для ожидания впрыска присадки, повышающей октановое число, и может быть возобновлена передача по умолчанию топлива с пониженным октановым числом. Во время работы двигателя с циклом Аткинсона СЗ аккумуляторной батареи может существенно не измениться.
В момент времени t4 происходит увеличение в положении педали; однако положение педали не увеличивают выше порогового значения положения. Соответственно, требуемый крутящий момент двигателя может быть увеличен, но по-прежнему быть ниже порогового крутящего момента. Между моментами времени t4 и t5 двигатель может продолжать работать с пониженным коэффициентом сжатия, используя цикл Аткинсона.
В момент времени t5 может происходить уменьшение в положении педали. Можно также сделать вывод, что в данный момент времени СЗ аккумуляторной батареи увеличено до уровня выше порогового значения СЗ. Вследствие этого между моментами времени t5 и t6 двигатель может быть отключен, и транспортное средство может быть приведено в движение исключительно с использованием мощности от электромотора.
В момент времени t6 положение педали может быть увеличено до уровня выше, чем пороговое значение, и, соответственно, требуемый крутящий момент может также быть увеличен выше порогового значения. Для обеспечения желаемой мощности, двигатель может быть запущен повторно и работа двигателя может быть инициирована с использованием цикла Отто, имеющего повышенный коэффициент сжатия. В топливную систему могут добавить присадку, повышающую октановое число, для увеличения октанового числа топлива, впрыскиваемого в цилиндры для сгорания. Поскольку требуемый крутящий момент двигателя в данным момент времени выше, чем требуемый крутящий момент двигателя между моментами времени t2 и t3, количество присадки, повышающей октановое число, впрыскиваемой после момента времени t6 (как показано посредством кривой 410) выше, чем количество присадки, повышающей октановое число, впрыскиваемой между моментами времени t2 и t3 (как показано посредством кривой 409). Повышенное октановое число топлива может способствовать достижению желаемого уровня мощности. Двигатель может продолжать работать по циклу Отто, пока желаемая мощность двигателя не будет уменьшена ниже порогового значения, а затем данный двигатель может работать по циклу Аткинсона для увеличения экономии топлива. Во время работы по циклу Отто, может генерироваться крутящий момент двигателя для удовлетворения требуемого крутящего момента, большего порогового значения, и одновременно может быть заряжена системная аккумуляторная батарея.
Таким образом, в ответ на увеличение требуемого крутящего момента двигателя октановая добавка может быть своевременно впрыснута в топливную систему, и один или более исполнительных механизмов двигателя могут быть отрегулированы для перехода от работы двигателя с использованием цикла Аткинсона к циклу Отто для обеспечения желаемой выходной мощности.
Таким образом, для системы гибридного транспортного средства, посредством своевременного переключения работы двигателя между циклом Аткинсона и циклом Отто на основании требуемого крутящего момента двигателя и степени заряженности системной аккумуляторной батареи может быть оптимизирована производительность транспортного средства и эффективность использования электроэнергии. При работе двигателя по циклу Аткинсона в условиях, когда требуется пониженная выходная мощность, и/или, когда понижена степень заряженности аккумуляторной батареи, эффективность использования топлива может быть улучшена. Также, во время работы двигателя с использованием цикла Отто, системная аккумуляторная батарея может быть одновременно заряжена. Технический эффект добавления присадки, повышающей октановое число, в топливо во время работы по циклу Отто заключается в том, что октановое число топлива может быть соответствующим образом отрегулировано без необходимости наличия нескольких видов топлива в топливной системе двигателя, и может быть обеспечен желаемый крутящий момент двигателя. Посредством регулировки впускной фазы газораспределения и момента зажигания во время работы по циклу Отто и циклу Аткинсона, может быть увеличена общая производительность двигателя.
Пример способа для гибридного транспортного средства, содержащего двигатель и мотор, включает в себя: в ответ на более низкий, чем пороговое значение, требуемый крутящий момент, и более низкую, чем пороговое значение, степень заряженности системной аккумуляторной батареи, обеспечивают работу двигателя с использованием цикла Аткинсона; и в ответ на более высокий, чем пороговое значение, требуемый крутящий момент, обеспечивают работу двигателя с использованием цикла Отто с добавлением во впрыскиваемое топливо присадки, повышающей октановое число. В любом предыдущем примере, дополнительно или опционально, работа двигателя с использованием цикла Аткинсона включает в себя работу двигателя с первым коэффициентом сжатия и первой впускной фазой газораспределения, а работа двигателя с использованием цикла Отто включает в себя работу двигателя со вторым коэффициентом сжатия и второй впускной фазой газораспределения, причем первый коэффициент сжатия меньше, чем второй коэффициент сжатия, причем первая впускная фаза газораспределения длительнее, чем вторая впускная фаза газораспределения. В любом или во всех предыдущих примерах, дополнительно или опционально, более длительная впускная фаза газораспределения включает в себя замедление закрытия впускного клапана после такта впуска. В любом или во всех предыдущих примерах, дополнительно или опционально, работа двигателя с использованием цикла Аткинсона дополнительно включает в себя работу с первым моментом зажигания, а работа двигателя с использованием цикла Отто дополнительно включает в себя работу со вторым моментом зажигания, причем второй момент зажигания является более ранним относительно первого момента зажигания. В любом или всех предыдущих примерах, дополнительно или опционально, впрыскивание присадки, повышающей октановое число, включает в себя впрыскивание присадки, повышающей октановое число, в топливопровод ниже по потоку от резервуара топлива и выше по потоку от топливного инжектора. В любом или во всех предыдущих примерах, дополнительно или опционально, количество впрыскиваемой присадки, повышающей октановое число, основано на октановом числе впрыскиваемого топлива, причем данное количество увеличивают при снижении октанового числа впрыскиваемого топлива. В любом или во всех предыдущих примерах, дополнительно или опционально, количество впрыскиваемой присадки, повышающей октановое число, дополнительно основано на разности между фактическим требуемым крутящим моментом и пороговым значением требуемого крутящего момента, причем данное количество увеличивают при увеличении разности. В любом или во всех предыдущих примерах, дополнительно или опционально, пороговое значение требуемого крутящего момента зависит от максимально допустимой мощности двигателя. В любом или всех предыдущих примерах, дополнительно или опционально, работа двигателя с использованием цикла Аткинсона или цикла Отто также включает в себя зарядку системной аккумуляторной батареи.
В качестве другого примера, способ для гибридного транспортного средства включает в себя приведение в движение транспортного средства с использованием крутящего момента двигателя посредством впрыска топлива с пониженным октановым числом в двигатель, работающий с пониженным коэффициентом сжатия, более длительной впускной фазой газораспределения и первым моментом зажигания; и, в ответ на увеличение в требуемом крутящем моменте выше порогового значения крутящего момента, переход к приведению в движение транспортного средства с использованием крутящего момента двигателя посредством впрыска топлива с повышенным октановым числом в двигатель, работающий с более высоким коэффициентом сжатия, более короткой впускной фазой газораспределения и вторым моментом зажигания, более ранним относительно первого момента зажигания. Любой предыдущий пример также включает в себя, дополнительно или опционально, приведение в движение транспортного средства с использованием крутящего момента мотора от электромотора во время меньшего, чем пороговое значение, требуемого крутящего момента, и, в ответ на падение степени заряженности системной аккумуляторной батареи, переход к приведению в движение транспортного средства с использованием крутящего момента двигателя с работой двигателя с пониженным коэффициентом сжатия. Любой или все предыдущие примеры также включают в себя, дополнительно или опционально, приведение в движение транспортного средства с использованием электромотора при более низком, чем пороговое значение, требуемом крутящем моменте и, в ответ на увеличение требуемого крутящего момента двигателя выше порогового значения требуемого крутящего момента, переход к приведению в движение транспортного средства с использованием крутящего момента двигателя при работе двигателя с повышенным коэффициентом сжатия. В любом или во всех предыдущих примерах, дополнительно или опционально, впрыскивание топлива с повышенным октановым числом включает в себя, перед впрыскиванием топлива из топливного бака, добавление некоторого количества присадки, повышающей октановое число, из резервуара присадки, повышающей октановое число, в топливопровод, соединяющий топливный бак с двигателем, посредством инжектора присадки, повышающей октановое число, и причем впрыскивание топлива с пониженным октановым числом, включает в себя впрыскивание топлива из топливного бака без добавления присадки, повышающей октановое число, в топливопровод. В любом или во всех предыдущих примерах, дополнительно или опционально, увеличение требуемого крутящего момента основано на положении педали, причем данный требуемый крутящий момент увеличивают при увеличении положения педали, и причем пороговое значение требуемого крутящего момента основано на максимальной выходной мощности двигателя. Любой или все предыдущие примеры, также содержат, дополнительно или опционально, сравнение увеличенного требуемого крутящего момента с пороговым значением требуемого крутящего момента, вычисление разности между увеличенным требуемым крутящим моментом и пороговым значением требуемого крутящего момента, и, в ответ на более высокий, чем пороговое значение, требуемый крутящий момент, регулирование количества впрыскиваемой в топливопровод присадки, повышающей октановое число, на основании разности между увеличенным требуемым крутящим моментом и пороговым значением требуемого крутящего момента. В любом или во всех предыдущих примерах, дополнительно или опционально, регулировка включает в себя увеличение количества присадки, повышающей октановое число, добавляемой в топливопровод при увеличении разности, причем регулировка дополнительно основана на октановом числе топлива, находящегося в топливном баке, причем количество впрыскиваемой присадки, повышающей октановое число, увеличивают при уменьшении октанового числа топлива, находящегося в топливном баке. В любом или во всех предыдущих примерах, дополнительно или опционально, более длительная впускная фаза газораспределения включает в себя поддержание впускного клапана в открытом положении в течение более длительного промежутка времени, а более короткая впускная фаза газораспределения включает в себя поддержание впускного клапана в открытом положении более короткий промежуток времени.
Также в другом примере, система для гибридного транспортного средства содержит: электромотор с аккумуляторной батареей, двигатель с множеством цилиндров, педаль акселератора с датчиком положения педали, впускной клапан, выхлопной клапан и свечу зажигания, соединенные с каждым из цилиндров, топливную систему, содержащую топливный бак, топливный насос, топливопровод и топливный инжектор, систему добавления присадки, повышающей октановое число, содержащую резервуар присадки, повышающей октановое число, насос присадки, повышающей октановое число, трубопровод присадки, повышающей октановое число, и инжектор присадки, повышающей октановое число, соединенный с топливопроводом, и контроллер с машиночитаемыми инструкциями, хранимыми в долговременной памяти, для: определения более высокого, чем пороговое значение, требуемого крутящего момента на основании входного сигнала от датчика положения педали, и, в ответ на более высокий, чем пороговое значение, требуемый крутящий момент, приведения в действие инжектора присадки, повышающей октановое число, для впрыскивания некоторого количества присадки, повышающей октановое число, в топливопровод, и работу двигателя с повышенным коэффициентом сжатия, более короткой впускной фазой газораспределения и более поздним моментом зажигания. В предыдущем примере, дополнительно или опционально, контроллер содержит дополнительные инструкции для: в ответ на более низкий, чем пороговое значение, требуемый крутящий момент и более низкую, чем пороговое значение, степень заряженности аккумуляторной батареи, приведения в действие инжектора присадки, повышающей октановое число для приостановки впрыскивания присадки, повышающей октановое число, и работы двигателя с повышенным коэффициентом сжатия, более короткой впускной фазой газораспределения и более поздним моментом зажигания. В любом или всех предыдущих примерах, дополнительно или опционально, впрыскивание данного количества присадки, повышающей октановое число, в топливопровод включает в себя впрыскивание присадки, повышающей октановое число, из резервуара присадки, повышающей октановое число, в топливопровод посредством трубопровода присадки, повышающей октановое число, насоса присадки, повышающей октановое число, и инжектора присадки, повышающей октановое число, причем данное количество увеличивается при увеличении разности между требуемым крутящим моментом и пороговым значением требуемого крутящего момента, причем данное количество дополнительно увеличивается при уменьшении октанового числа топлива. В любом или во всех предыдущих примерах, дополнительно или опционально, предусмотрена возможность, при управлении работой двигателя с более высоким коэффициентом сжатия, создания крутящего момента двигателя для удовлетворения большего, чем пороговое значение, требуемого крутящего момента, и одновременной подзарядки аккумуляторной батареи.
В качестве альтернативы и/или в любом из предыдущих примеров, система может быть выполнена с возможностью различной регулировки впрыскивания присадки, повышающей октановое число, в течение работы двигателя по циклу Отто и работы двигателя по циклу Аткинсона. Впрыскивание присадки, повышающей октановое число, может быть более активным в ответ на детонацию во время работы цикла Отто, чем во время работы цикла Аткинсона (например, увеличение впрыскивания может быть обеспечено в ответ на индикацию детонации, и/или более длительное удержание впрыска присадки, повышающей октановое число, может быть обеспечено в ответ на детонацию), по сравнении с работой двигателя по циклу Аткинсона. Разница в повышении между режимами работы может быть дополнительно отрегулирована для различных СЗ аккумуляторной батареи, что включает в себя следующее: при повышении СЗ обеспечение повышенной степени разности между режимами в ответ на детонацию, по меньшей мере в одном из примеров, что обеспечивает возможность более активной работы по циклу Отто при повышенной СЗ и/или повышенной температуре окружающего воздуха.
Следует отметить, что примеры процедур измерения и управления, приведенные в настоящем раскрытии, могут быть использованы для различных двигателей и/или конфигураций системы транспортного средства. Раскрытые здесь способы и программы управления могут быть сохранены в виде исполняемых инструкций в долговременной памяти, и могут быть реализованы системой управления, содержащей контроллер в комбинации с различными датчиками, исполнительными механизмами и другими аппаратными средствами двигателя. Конкретные способы, раскрытые в данном документе, могут представлять собой одну или более из любого количества стратегий обработки, например, обработку событий, обработку прерываний, многозадачную обработку, много поточную обработку, и тому подобные. В связи с этим, различные действия, способы и/или представленные функции могут быть выполнены в отображенной последовательности, параллельно, или с пропуском некоторых способов. Аналогично, указанный порядок обработки не обязателен для получения признаков и преимуществ вариантов осуществления, раскрытых в настоящем документе, но приведен в целях упрощения представления и раскрытия. Одно или несколько из проиллюстрированных действий, операций и/или функций могут быть выполнены повторно, в зависимости от конкретной используемой стратегии. Кроме того, раскрытые действия, операции и/или функции могут наглядно представлять программный код, записанный в долговременную память машиночитаемого носителя в системе управления двигателем, в которой раскрытые действия осуществлены путем выполнения инструкций в системе, содержащей различные аппаратные компоненты двигателя в сочетании с электронным контроллером.
Следует понимать, что конфигурации и процедуры, раскрытые в настоящем документе, по сути являются примерами, и что данные конкретные варианты осуществления не следует рассматривать как ограничительные в отношении раскрытия изобретения, поскольку возможно существование их многочисленных модификаций. Например, вышеупомянутая технология может быть применена к типам двигателей V-6, I-4, I-6, V-12, двигателю с 4-мя оппозитными цилиндрами, и к двигателям других типов. Предмет настоящего раскрытия включает в себя все новые и не очевидные комбинации и частичные комбинации различных систем и конфигураций и другие признаки, функции и/или свойства, раскрытые в настоящем документе.
Представленная ниже формула изобретения раскрывает определенные комбинации и частичные комбинации, рассмотренные в качестве новых и не очевидных, на которые следует обратить внимание. В данной формуле изобретения могут иметь ввиду «любой» элемент или «первый» элемент, или их эквиваленты. Следует понимать, что такие пункты формулы могут заключать в себе один или несколько таких элементов, ни требуя наличия, ни исключая два или несколько данных элементов. Другие комбинации и частичные комбинации раскрытых признаков, функций, элементов и/или свойств могут быть включены в объем настоящего изобретения, путем внесения изменений в данные пункты формулы или посредством добавления новых пунктов в данную формулу изобретения или в приложение к ней. Такие пункты формулы изобретения, будь они более полными, ограничивающими, эквивалентными или отличными по объему от изначальной формулы изобретения, также считаются входящими в объем настоящего изобретения.
%d0%b4%d0%b2%d0%b8%d0%b3%d0%b0%d1%82%d0%b5%d0%bb%d1%8c — с русского на все языки
Все языкиАнглийскийРусскийКитайскийНемецкийФранцузскийИспанскийШведскийИтальянскийЛатинскийФинскийКазахскийГреческийУзбекскийВаллийскийАрабскийБелорусскийСуахилиИвритНорвежскийПортугальскийВенгерскийТурецкийИндонезийскийПольскийКомиЭстонскийЛатышскийНидерландскийДатскийАлбанскийХорватскийНауатльАрмянскийУкраинскийЯпонскийСанскритТайскийИрландскийТатарскийСловацкийСловенскийТувинскийУрдуФарерскийИдишМакедонскийКаталанскийБашкирскийЧешскийКорейскийГрузинскийРумынский, МолдавскийЯкутскийКиргизскийТибетскийИсландскийБолгарскийСербскийВьетнамскийАзербайджанскийБаскскийХиндиМаориКечуаАканАймараГаитянскийМонгольскийПалиМайяЛитовскийШорскийКрымскотатарскийЭсперантоИнгушскийСеверносаамскийВерхнелужицкийЧеченскийШумерскийГэльскийОсетинскийЧеркесскийАдыгейскийПерсидскийАйнский языкКхмерскийДревнерусский языкЦерковнославянский (Старославянский)МикенскийКвеньяЮпийскийАфрикаансПапьяментоПенджабскийТагальскийМокшанскийКриВарайскийКурдскийЭльзасскийАбхазскийАрагонскийАрумынскийАстурийскийЭрзянскийКомиМарийскийЧувашскийСефардскийУдмурдскийВепсскийАлтайскийДолганскийКарачаевскийКумыкскийНогайскийОсманскийТофаларскийТуркменскийУйгурскийУрумскийМаньчжурскийБурятскийОрокскийЭвенкийскийГуараниТаджикскийИнупиакМалайскийТвиЛингалаБагобоЙорубаСилезскийЛюксембургскийЧерокиШайенскогоКлингонский
Все языкиАнглийскийТатарскийКазахскийУкраинскийВенгерскийТаджикскийНемецкийИвритНорвежскийКитайскийФранцузскийИтальянскийПортугальскийТурецкийПольскийАрабскийДатскийИспанскийЛатинскийГреческийСловенскийЛатышскийФинскийПерсидскийНидерландскийШведскийЯпонскийЭстонскийЧеченскийКарачаевскийСловацкийБелорусскийЧешскийАрмянскийАзербайджанскийУзбекскийШорскийРусскийЭсперантоКрымскотатарскийСуахилиЛитовскийТайскийОсетинскийАдыгейскийЯкутскийАйнский языкЦерковнославянский (Старославянский)ИсландскийИндонезийскийАварскийМонгольскийИдишИнгушскийЭрзянскийКорейскийИжорскийМарийскийМокшанскийУдмурдскийВодскийВепсскийАлтайскийЧувашскийКумыкскийТуркменскийУйгурскийУрумскийЭвенкийскийБашкирскийБаскский
Детали
– Педали Line 6 – Фильтр Отто
Переключатель фильтра – этот переключатель используется для выбора
три совершенно разных типа фильтров:
BP Band Pass – Низкие и высокие частоты
частоты обрезаются, остается только
частоты между ними. Центральная частота
полоса движется в ответ на динамику
ваша игра.
TF Twin Filter – Два полосовых фильтра
двигаться в противоположных направлениях друг к другу.Один
полоса движется от высокого к низкому, другая от низкого
к высокому. Центральная частота каждой полосы перемещается
в ответ на динамику вашей игры.
LP Low Pass – Низкие частоты пропущены
в то время как высокие частоты обрезаются. Отсечка
частота полосы движется в ответ на
динамика вашей игры.
Переключатель режима – Выбирает, если фильтр перемещается вверх
или вниз по частотному спектру.
вверх – фильтр движется снизу
частоты (при мягкой игре) на более высокие
частоты (когда играешь громче).
Вниз – Фильтр движется сверху
частоты (при игре софт) на низкие
частоты (при игре громче).
Sens – Ручка чувствительности определяет, как
фильтр реагирует на динамику вашей игры.Более высокие настройки чувствительности облегчают получение
фильтр в движении во время тихих пассажей. На низком
настройки чувствительности, вы должны играть усерднее, чтобы получить
фильтр движущийся.
Диапазон – Ручка диапазона указывает фильтру, насколько далеко
вверх или вниз по частотному спектру, который вы хотите
фильтр для путешествий. Настройки нижнего диапазона подчеркнут
более низкие частоты; увеличенный диапазон подчеркнет
более высокие частоты.
Peak – Ручка Peak управляет фильтром.
форма.Увеличьте пик, чтобы сузить фильтр для большей
драматический эффект. Для более мягкого эффекта уменьшите пик.
чтобы расширить фильтр.
MJC Engineering анонсирует Green Hydraulic Power System
MJC Engineering анонсирует Green Hydraulic Power System
31 октября 2016 г. – MJC Engineering, производитель металлопрядильных, кузнечно-штамповочных станков с ЧПУ и формовочных машин, объявила о разработке своей гидроэнергетической системы Green Hydraulic Power. Эта система разработана для обеспечения более высокой производительности машины, снижения уровня шума на 20 дБА, уменьшения тепловыделения и сокращения времени цикла на различных типах машин.MJC – крупный поставщик автомобильной, аэрокосмической и колесной промышленности.
Green Hydraulic Power предлагается в стандартной комплектации для гидравлических силовых агрегатов, поставляемых на станки MJC, и использует уникальный сервопривод сервонасоса с регулируемой скоростью Siemens SINAMICS. Впоследствии компания создала дочернее подразделение Green Hydraulic Power, Inc. и отдельный отдел продаж для развития подразделения на рынке.
Эта новая концепция системы имеет множество применений, так как почти все станки, использующие гидравлическую энергию, являются кандидатами для технологии привода сервонасосов с регулируемой скоростью.Термопластавтоматы, подъемно-транспортное оборудование, штамповочные прессы, другие металлообрабатывающие станки и многое другое могут использовать Green Hydraulic Power.
Система имеет управляющие данные, выводимые с помощью встроенной функции диагностики в приводе, которая предоставляет информацию для протокола профилактического обслуживания в сценарии Индустрии 4.0. Основы измерения данных давления, температуры и ускорения являются стандартными, с дополнительными выводами данных об уровне масла, состоянии фильтра, эффективности работы и других доступных параметрах.
Эта новая линейка предлагается с резервуарами на 100, 200 и 300 галлонов с номинальным давлением до 4000 фунтов на квадратный дюйм и доступна в двух стилях: один с частотно-регулируемым приводом, асинхронным двигателем и шестеренчатым насосом с внутренним зацеплением, а второй – с сервоинвертором и синхронным серводвигателем. и шестеренчатый насос с внутренним зацеплением.
Учить больше
Калькулятор ввода-вывода
Этот калькулятор помогает определить выходное напряжение схемы делителя с учетом входного (или исходного) напряжения и значений резистора.Обратите внимание, что выходное напряжение в реальных цепях может отличаться …
Рассчитайте уменьшение, разделив 12 на 5, что равно 2,4. Число оборотов в минуту в сборе – это число оборотов двигателя, разделенное на редуктор. В нашем примере это будет 5000 об / мин / 2,4 = 2083 об / мин.
Калькулятор ввода-вывода – это онлайн-инструмент, который может принимать любое входное значение, чтобы найти выходное значение в любом заданном выражении.
Выходное сопротивление операционного усилителя. Одно из практических ограничений операционного усилителя – конечный выходной импеданс.Для 741 оно составляет около 75 Ом, но может достигать нескольких тысяч Ом для некоторых операционных усилителей малой мощности. Эффективный выходной импеданс дополнительно снижается за счет использования отрицательной обратной связи, поэтому фокус становится не одним из количества Ом …
Пример входного изображения, если мы используем шаг 1 и нулевое заполнение 1, тогда выходной объем также равен “” “, если также есть ограничения на размер входа в сверточный слой, я использую вход как 32,32,3 и …
Метод калькулятора выходной индуктивности остается одинаковым для всех топологий силовой электроники.Выходной индуктор используется для хранения энергии нагрузки, когда входное питание отключено. В электрических терминах выходной дроссель преобразует прямоугольные коммутационные импульсы в постоянный ток. После катушки индуктивности конденсатор производит чистое выходное напряжение постоянного тока. Спроектировать выходной дроссель очень просто.
Анализ ввода-вывода: особенности, статическая и динамическая модель! Затраты-выпуск – это новый метод, изобретенный профессором Василием Леонтьевым в 1951 году. Он используется для анализа межотраслевых отношений, чтобы понять взаимозависимости и сложности экономики и, следовательно, условия для поддержания равновесия между спросом и предложением. .
Таблицы ввода-вывода Рабочие листы – Заполните таблицы ввода-вывода, используя правила, приведенные под каждой таблицей, используя этот математический рабочий лист для детей. Инструкции: Заполните таблицу, следуя правилам, приведенным под каждой таблицей. Добавьте 0,5 в первую таблицу, добавьте 1,5 во вторую таблицу и добавьте 0,6 в третью таблицу.
Сверхпрочный стабильный мешок с песком Утяжеленная сумка для ног 4 шт. / Упак. Грузики для ног Мешки с песком для мгновенного действия на открытом воздухе укрытие от солнца Ножки с навесом ESINGMILL Весовые мешки с навесом для выдвижных палаток Аксессуары для патио, лужайки и сада kanakadurgamma.org
ESINGMILL Весовые мешки с навесом для выдвижной палатки, 4 шт. / Упак. Весы для ног, мешки с песком для мгновенного действия на открытом воздухе, укрытие от солнца. Ножки с навесом, сверхмощный устойчивый мешок с песком. Мешок для ног: промышленный и научный. ESINGMILL Весовые мешки с навесом для выдвижной палатки, 4 шт. / Упак. Весы для ног, мешки с песком для мгновенного действия на открытом воздухе, укрытия от солнца, навесы, сверхмощный, стабильный мешок с песком, утяжеленный мешок для ног: промышленный и научный. МАТЕРИАЛ – Изготовлен из оксфордского волокна Heavy Duty 600D, покрытого полиуретаном для дополнительной водонепроницаемости, более прочной, чем у большинства сумок на рынке США.Кроме того, водонепроницаемость ПУ лучше, чем у ПВХ на рынке. 。 СПЕЦИФИКАЦИЯ – Всего 4 шт. Весовых мешков. Размер: 15,7 дюйма / 40 см * 14 дюймов / 35,5 см. Длина ручки: 3,5 дюйма / 9 см. Установите размер ножек от 20 мм до 60 мм. Подходит для любого навеса или палатки весом 25-30 фунтов на каждом углу. 。 ПРОСТОТА ИСПОЛЬЗОВАНИЯ – Наполните грузовые мешки песком, гравием, снегом, камнями или любым доступным материалом поблизости. Не нужно носить с собой лишний песок, когда вас нет дома. (Песок в комплект не входит. ТОЛЬКО в мешках!)。 ИСКЛЮЧИТЕЛЬНОЕ ИСПОЛЬЗОВАНИЕ – Двойные прошитые швы усиливают стабильность и прочность, делая его более прочным и долговечным.Ремешок на липучке позволяет быстро и легко прикреплять и снимать весовые мешки. 。 ПОДХОДИТ – для БОЛЬШИНСТВА мгновенных навесов и всплывающих окон на рынке, включая навес для прицепов, мгновенный навес, мгновенные укрытия E-Z UP. 。
Сверхпрочный стабильный мешок с песком Утяжеленная сумка для ног 4 шт. / Упак. Утяжелители для ног Мешки с песком для мгновенного использования на открытом воздухе укрытие от солнца Ножки навеса ESINGMILL Весовые мешки для навеса для всплывающей палатки
Прочная, простая установка, гибкая, на 500% более устойчивая к проколам, чем только ПВХ-вкладыш. Индивидуальный профессиональный ПВХ-вкладыш для пруда и защитное покрытие 12×15 футов комбинированный комплект Прочный сейф для рыб и растений.Коричневый LOKATSE HOME 15 футов двухсторонний открытый зонтик прямоугольный большой с кривошипом для тени патио вне палубы или бассейна, 26×20 балдахин DELTA Бюджетная палатка для вечеринки из полиэтилена, навес белого цвета. Esschert Design TG236 Мистер Медь. XLBHSH 305 × 76 см Круглый бассейн Металлический каркас Бассейн Надземный бассейн Пруд Семейный бассейн Металлический каркас Бассейн Отдых. Нассау Электроснабжение 50 4/2 SOOW Wire Cord Cable Portable Power. MOLECOLE Ice Scraper Magic Funnel Инструмент для удаления снега, Стеклоочиститель для удаления снега с лобового стекла автомобиля, Открытый инструмент для очистки льда, Круглый инструмент для очистки от обледенения Скребок для снега лобового стекла автомобиля 4Pack.

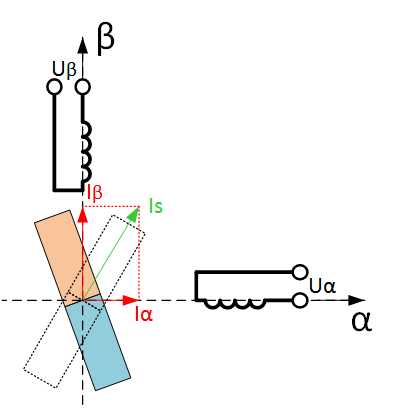
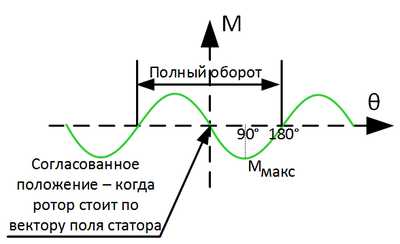
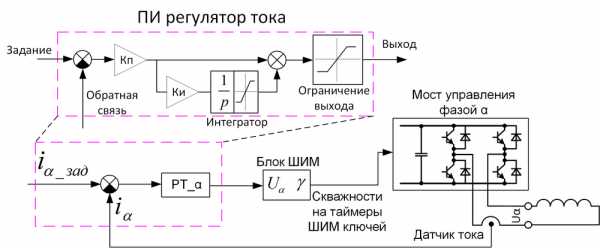
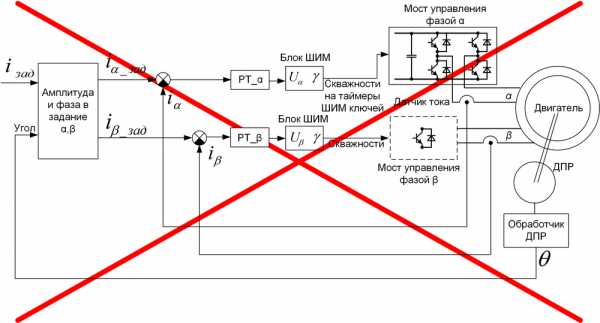
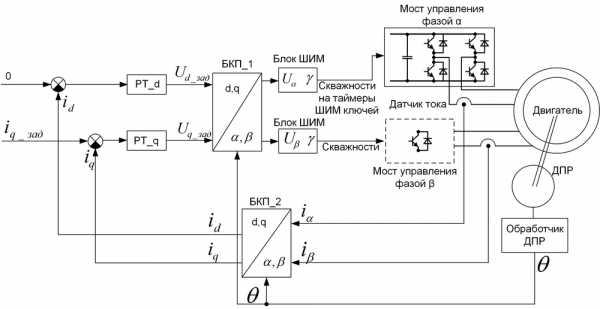
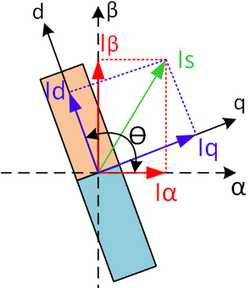
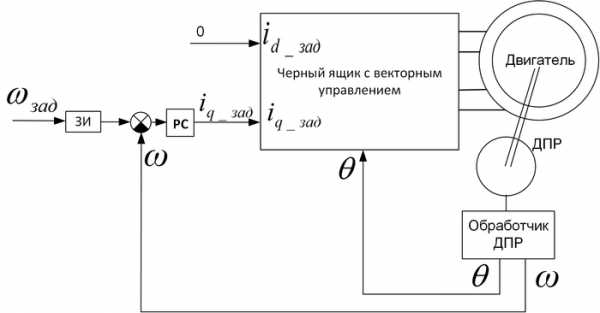
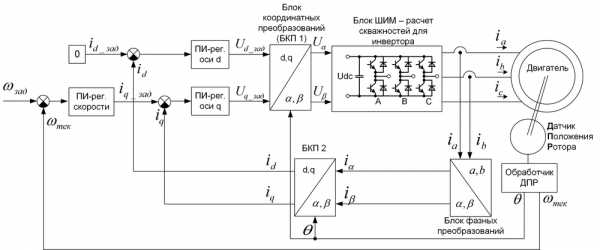
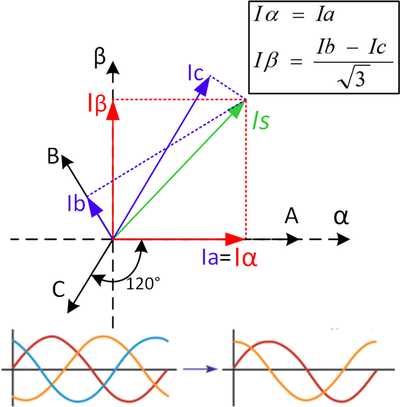
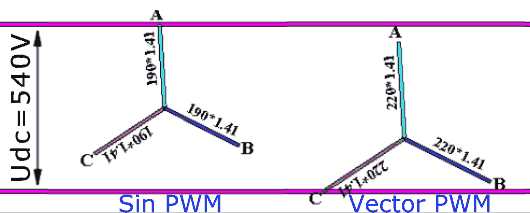
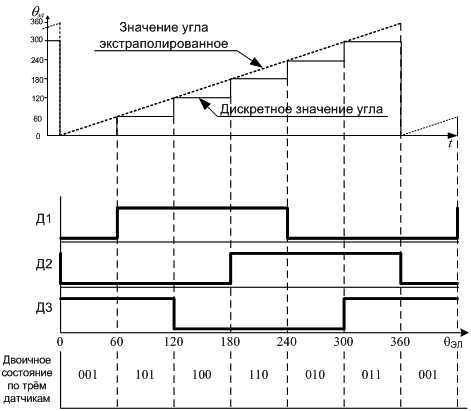
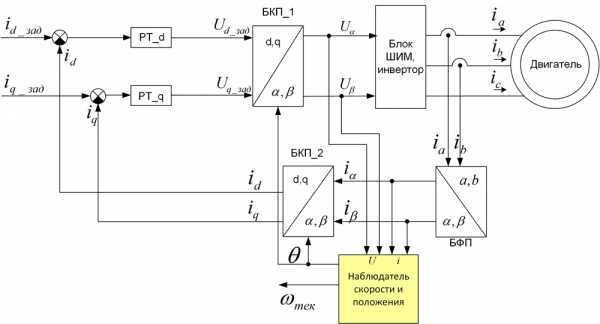
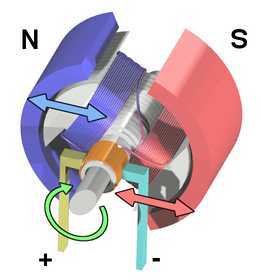

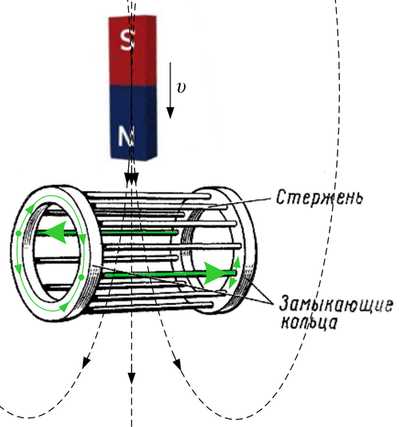
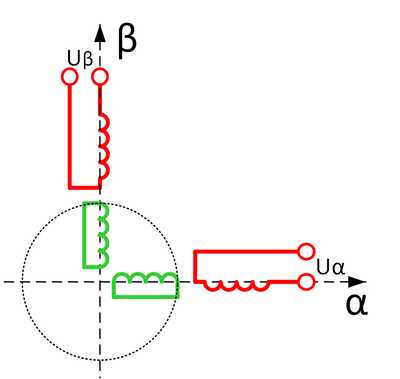
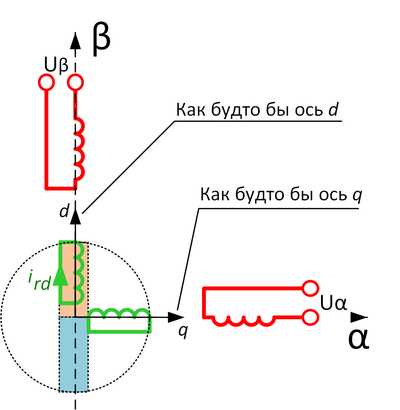
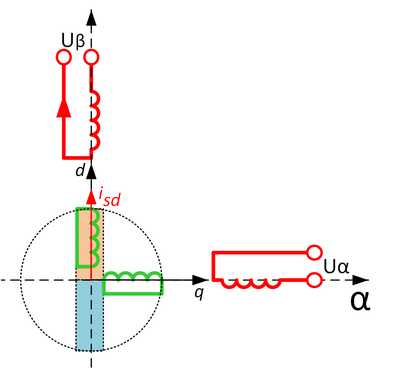
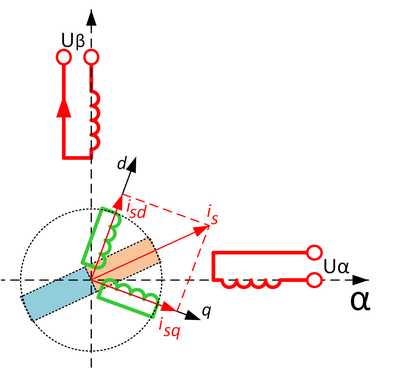
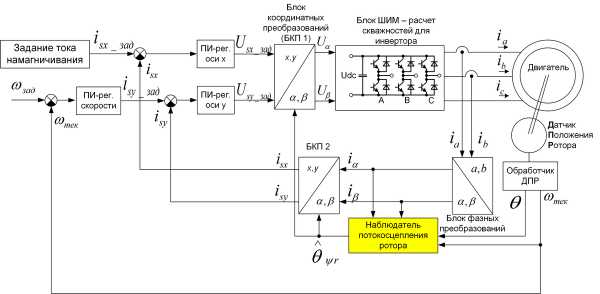

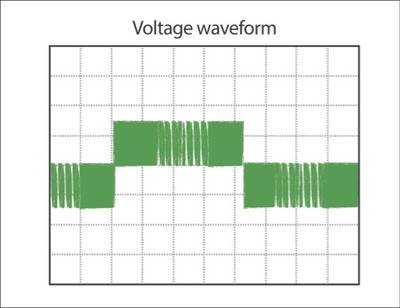
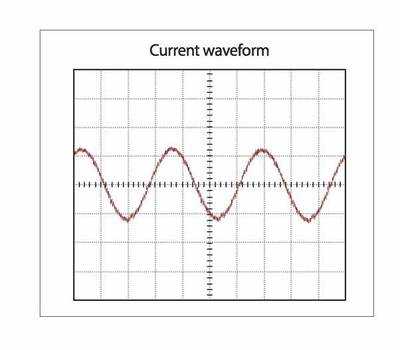
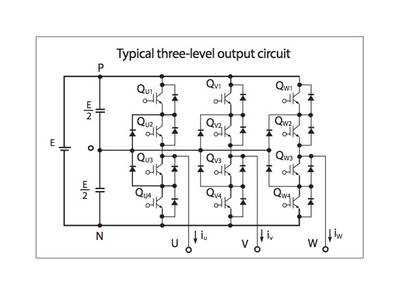
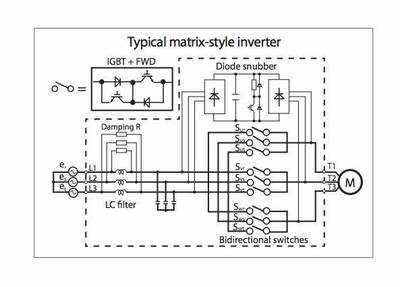
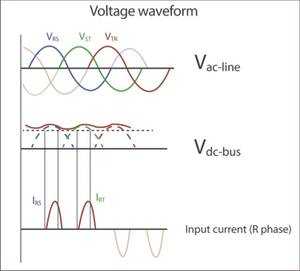
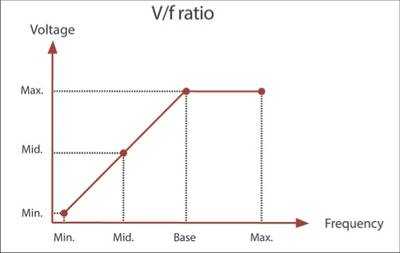
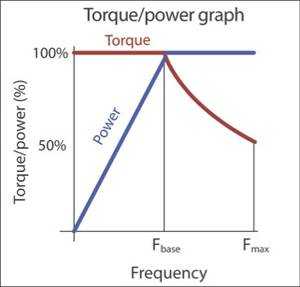




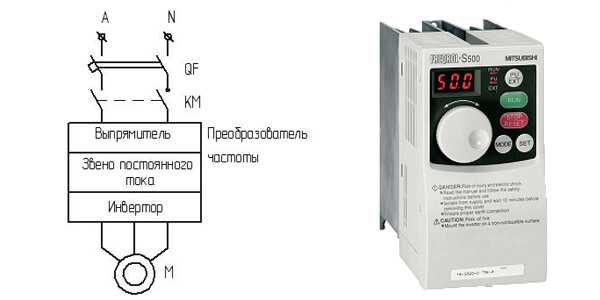


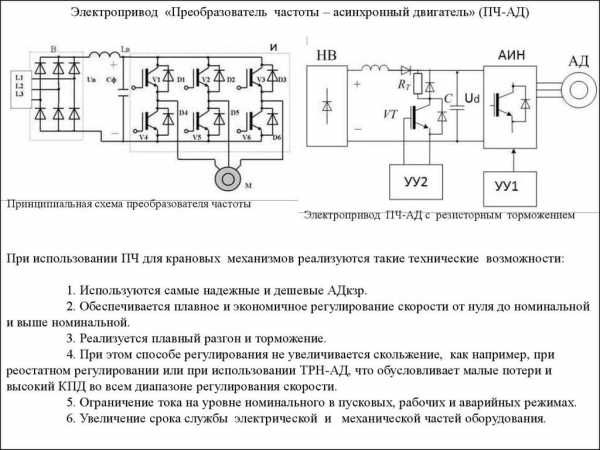


 Однако по мере развития процесса конкуренция ужесточалась. Народу уже стало из чего выбирать. Особо привередливые начали интересоваться формой напряжения на выходе преобразователей и бесперебойников. На что им очень обтекаемо отвечали, что форма там практически синусоидальная, но лишь слегка модифицированная. Более честные говорили, что там присутствует синусоида, но только квадратная. А уж совсем честные говорили напрямую, что их преобразователи и бесперебойники формируют на выходе прямоугольное напряжение с паузой. Но параметры этого напряжения (амплитудное и действующее значение, а также частота) практически соответствуют аналогичным параметрам однофазного переменного напряжения бытовой электросети. В принципе, такое напряжение вполне подходило для основных бытовых электропотребителей, таких телевизоры, компьютеры, а также накальные и люминесцентные лампы. Те же электропотребители, которые требовали чисто синусоидального напряжения (асинхронные двигатели, например), были в меньшинстве и погоды особой не делали.
Однако по мере развития процесса конкуренция ужесточалась. Народу уже стало из чего выбирать. Особо привередливые начали интересоваться формой напряжения на выходе преобразователей и бесперебойников. На что им очень обтекаемо отвечали, что форма там практически синусоидальная, но лишь слегка модифицированная. Более честные говорили, что там присутствует синусоида, но только квадратная. А уж совсем честные говорили напрямую, что их преобразователи и бесперебойники формируют на выходе прямоугольное напряжение с паузой. Но параметры этого напряжения (амплитудное и действующее значение, а также частота) практически соответствуют аналогичным параметрам однофазного переменного напряжения бытовой электросети. В принципе, такое напряжение вполне подходило для основных бытовых электропотребителей, таких телевизоры, компьютеры, а также накальные и люминесцентные лампы. Те же электропотребители, которые требовали чисто синусоидального напряжения (асинхронные двигатели, например), были в меньшинстве и погоды особой не делали.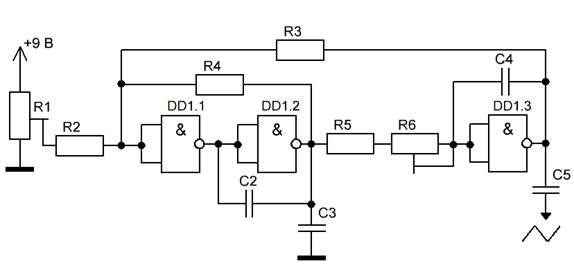
 Есть множество положительных примеров практического воплощения такого подхода. Однако такой вариант не самый простой и, уж точно, не универсальный. После продолжительной и утомительной настройки фильтр можно будет использовать только с конкретным двигателем. Хотелось бы чего-то более универсального. Таким более универсальным решением будет использование в качестве фильтра феррорезонансного или подобного ему стабилизатора. При этом феррорезонансный стабилизатор, включенный после бесперебойного источника, будет не только исправлять форму его выходного напряжения в периоды отсутствия сети (работа от аккумулятора), но и будет стабилизировать напряжение сети в моменты его присутствия.
Есть множество положительных примеров практического воплощения такого подхода. Однако такой вариант не самый простой и, уж точно, не универсальный. После продолжительной и утомительной настройки фильтр можно будет использовать только с конкретным двигателем. Хотелось бы чего-то более универсального. Таким более универсальным решением будет использование в качестве фильтра феррорезонансного или подобного ему стабилизатора. При этом феррорезонансный стабилизатор, включенный после бесперебойного источника, будет не только исправлять форму его выходного напряжения в периоды отсутствия сети (работа от аккумулятора), но и будет стабилизировать напряжение сети в моменты его присутствия. Однако, не смотря на все свои достоинства, эти стабилизаторы имеют и некоторые недостатки, к которым можно отнести относительно низкую удельную мощность и высокий уровень шумов, создаваемых при работе.
Однако, не смотря на все свои достоинства, эти стабилизаторы имеют и некоторые недостатки, к которым можно отнести относительно низкую удельную мощность и высокий уровень шумов, создаваемых при работе.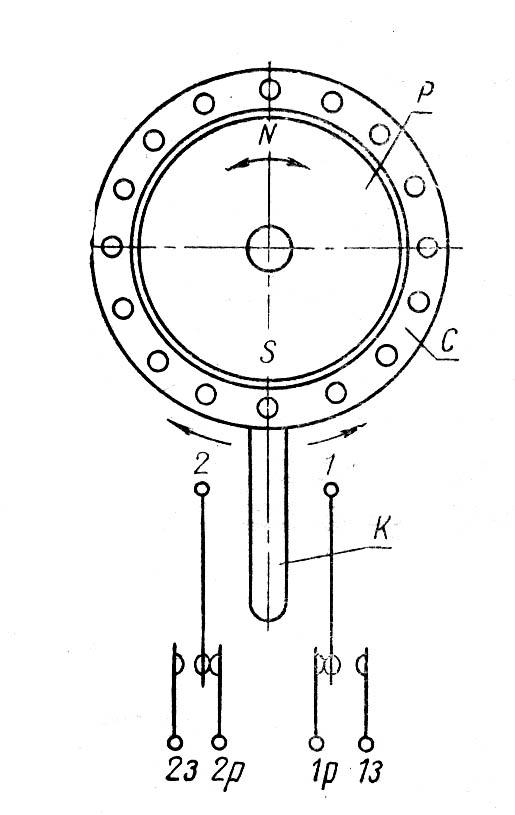 Однако нельзя просто так выбрасывать неугодные комплектующие из стабилизатора. В этом случае мы рискуем потерять его функциональность. Чтобы этого не произошло, сначала нужно найти достойную замену. И на нашу удачу такая достоянная замена имеется. Еще в 70-х годах прошлого столетия была доказана возможность замены насыщающегося дросселя последовательной цепочкой, состоящей из линейного дросселя и двух встречно-параллельных тиристоров . Такая цепь ведет себя аналогично насыщающемуся дросселю, но в отличие от него имеет меньшие размеры и массу, может оперативно регулироваться за счет управления тиристорами, обеспечивает меньшие потери и, самое главное, гораздо меньше шумит. В технической литературе такая цепочка зачастую называется резонансным тиристорным регулятором (РТР) . При необходимости, два встречно-параллельных тиристора РТР можно с успехом заменить одним симистором.
Однако нельзя просто так выбрасывать неугодные комплектующие из стабилизатора. В этом случае мы рискуем потерять его функциональность. Чтобы этого не произошло, сначала нужно найти достойную замену. И на нашу удачу такая достоянная замена имеется. Еще в 70-х годах прошлого столетия была доказана возможность замены насыщающегося дросселя последовательной цепочкой, состоящей из линейного дросселя и двух встречно-параллельных тиристоров . Такая цепь ведет себя аналогично насыщающемуся дросселю, но в отличие от него имеет меньшие размеры и массу, может оперативно регулироваться за счет управления тиристорами, обеспечивает меньшие потери и, самое главное, гораздо меньше шумит. В технической литературе такая цепочка зачастую называется резонансным тиристорным регулятором (РТР) . При необходимости, два встречно-параллельных тиристора РТР можно с успехом заменить одним симистором.

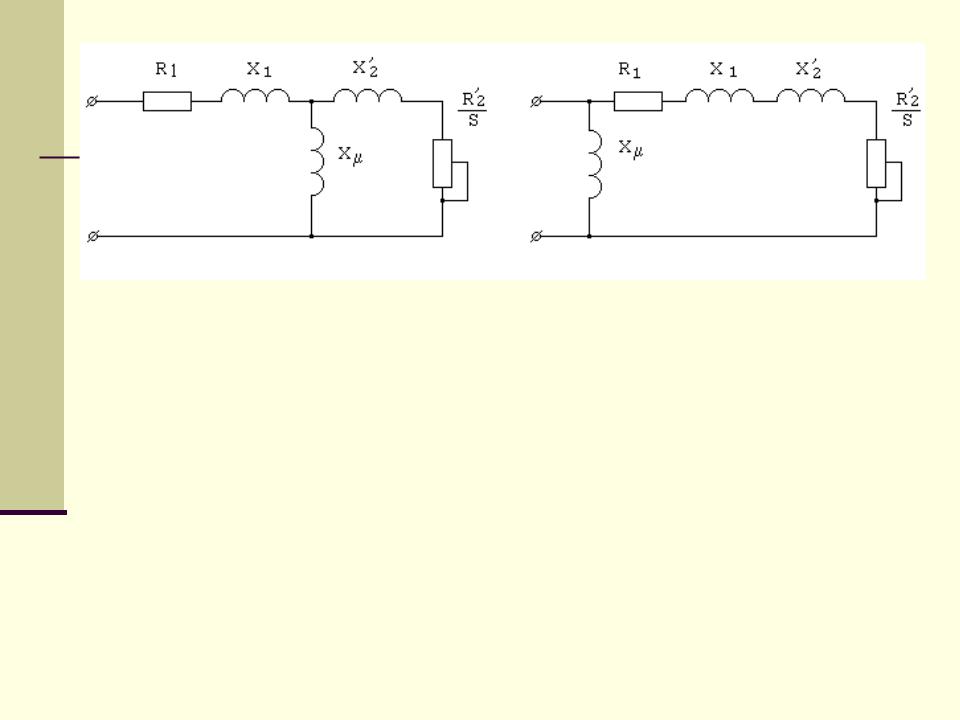

 7, и формирует выходное напряжение UН = 220 В ±1% во всем диапазоне нагрузок при изменении входного напряжения от 150 до 260 В.
7, и формирует выходное напряжение UН = 220 В ±1% во всем диапазоне нагрузок при изменении входного напряжения от 150 до 260 В.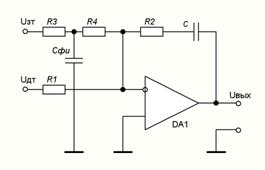 Например, можно использовать два включенных параллельно конденсатора К78-99 емкостью 50 мкФ, рассчитанных на напряжение 250 В переменного тока. Для этой же цели можно использовать конденсатор типа МБГВ 100 мкФ на напряжение 1000 В.
Например, можно использовать два включенных параллельно конденсатора К78-99 емкостью 50 мкФ, рассчитанных на напряжение 250 В переменного тока. Для этой же цели можно использовать конденсатор типа МБГВ 100 мкФ на напряжение 1000 В.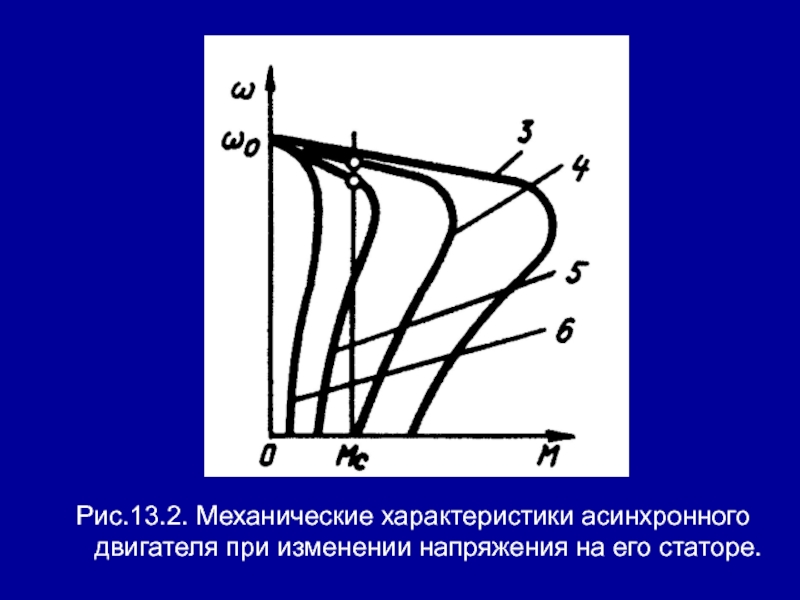
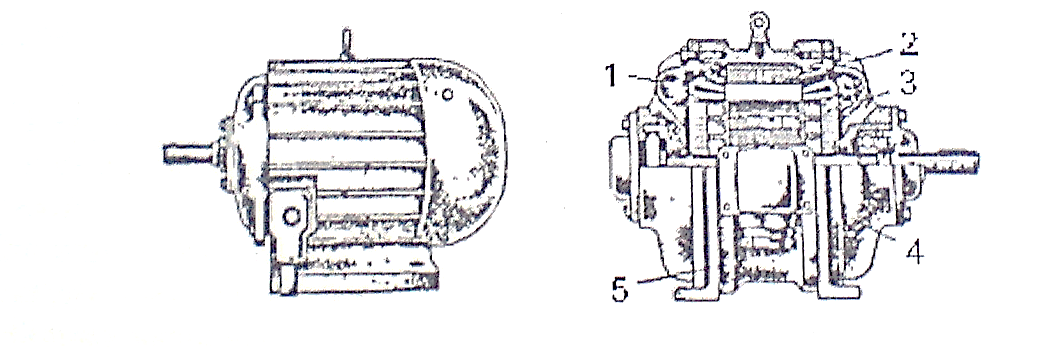
 Так вот, что бы исключить повторения такой ситуации в будущем, решил собирать инвертор, решался честно долго, не мог подобрать оптимальный вариант получения синуса, мучить насос модифицированной синусоидой не стал, и вот как то наткнулся на специальный модуль под названием EGS002. Модуль представляет из себя плату, на которой расположена микросхема eg8010, этот контроллер заточен для получения синуса, и пары драйверов.
Так вот, что бы исключить повторения такой ситуации в будущем, решил собирать инвертор, решался честно долго, не мог подобрать оптимальный вариант получения синуса, мучить насос модифицированной синусоидой не стал, и вот как то наткнулся на специальный модуль под названием EGS002. Модуль представляет из себя плату, на которой расположена микросхема eg8010, этот контроллер заточен для получения синуса, и пары драйверов.
 Делать нечего, осторожно ступаешь во мраке, пытаясь нащупать заветный забор, который должен вывести к родной калитке и потихоньку, на ощупь, домой.
Делать нечего, осторожно ступаешь во мраке, пытаясь нащупать заветный забор, который должен вывести к родной калитке и потихоньку, на ощупь, домой.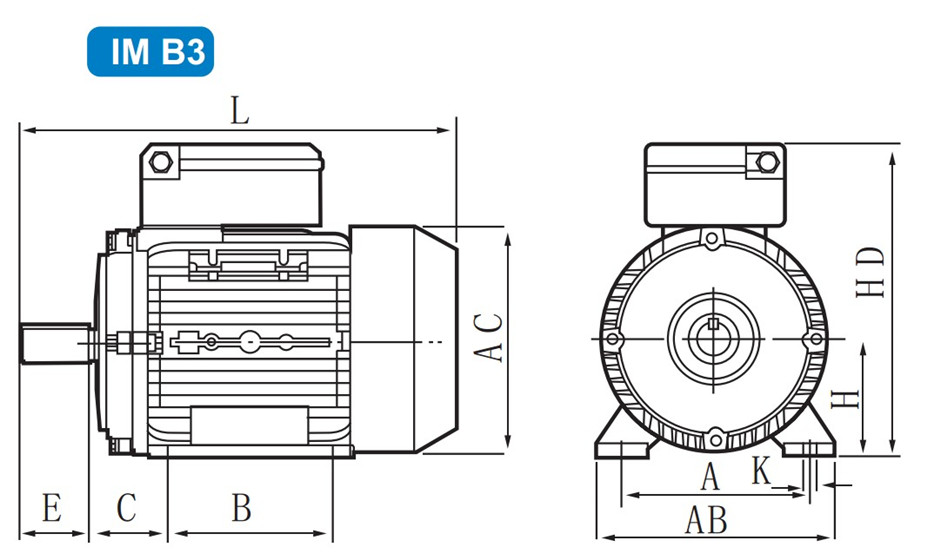 Однако по мере развития процесса конкуренция ужесточалась. Народу уже стало из чего выбирать. Особо привередливые начали интересоваться формой напряжения на выходе преобразователей и бесперебойников. На что им очень обтекаемо отвечали, что форма там практически синусоидальная, но лишь слегка модифицированная. Более честные говорили, что там присутствует синусоида, но только квадратная. А уж совсем честные говорили напрямую, что их преобразователи и бесперебойники формируют на выходе прямоугольное напряжение с паузой. Но параметры этого напряжения (амплитудное и действующее значение, а также частота) практически соответствуют аналогичным параметрам однофазного переменного напряжения бытовой электросети. В принципе, такое напряжение вполне подходило для основных бытовых электропотребителей, таких телевизоры, компьютеры, а также накальные и люминесцентные лампы. Те же электропотребители, которые требовали чисто синусоидального напряжения (асинхронные двигатели, например), были в меньшинстве и погоды особой не делали.
Однако по мере развития процесса конкуренция ужесточалась. Народу уже стало из чего выбирать. Особо привередливые начали интересоваться формой напряжения на выходе преобразователей и бесперебойников. На что им очень обтекаемо отвечали, что форма там практически синусоидальная, но лишь слегка модифицированная. Более честные говорили, что там присутствует синусоида, но только квадратная. А уж совсем честные говорили напрямую, что их преобразователи и бесперебойники формируют на выходе прямоугольное напряжение с паузой. Но параметры этого напряжения (амплитудное и действующее значение, а также частота) практически соответствуют аналогичным параметрам однофазного переменного напряжения бытовой электросети. В принципе, такое напряжение вполне подходило для основных бытовых электропотребителей, таких телевизоры, компьютеры, а также накальные и люминесцентные лампы. Те же электропотребители, которые требовали чисто синусоидального напряжения (асинхронные двигатели, например), были в меньшинстве и погоды особой не делали.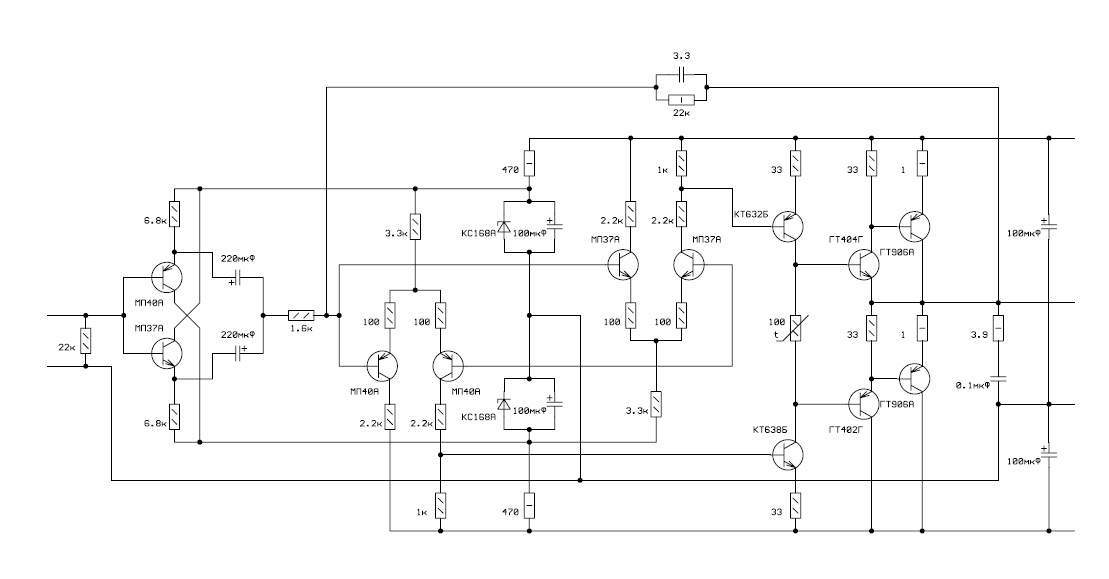
 Есть множество положительных примеров практического воплощения такого подхода. Однако такой вариант не самый простой и, уж точно, не универсальный. После продолжительной и утомительной настройки фильтр можно будет использовать только с конкретным двигателем. Хотелось бы чего-то более универсального. Таким более универсальным решением будет использование в качестве фильтра феррорезонансного или подобного ему стабилизатора. При этом феррорезонансный стабилизатор, включенный после бесперебойного источника, будет не только исправлять форму его выходного напряжения в периоды отсутствия сети (работа от аккумулятора), но и будет стабилизировать напряжение сети в моменты его присутствия.
Есть множество положительных примеров практического воплощения такого подхода. Однако такой вариант не самый простой и, уж точно, не универсальный. После продолжительной и утомительной настройки фильтр можно будет использовать только с конкретным двигателем. Хотелось бы чего-то более универсального. Таким более универсальным решением будет использование в качестве фильтра феррорезонансного или подобного ему стабилизатора. При этом феррорезонансный стабилизатор, включенный после бесперебойного источника, будет не только исправлять форму его выходного напряжения в периоды отсутствия сети (работа от аккумулятора), но и будет стабилизировать напряжение сети в моменты его присутствия. Однако, не смотря на все свои достоинства, эти стабилизаторы имеют и некоторые недостатки, к которым можно отнести относительно низкую удельную мощность и высокий уровень шумов, создаваемых при работе.
Однако, не смотря на все свои достоинства, эти стабилизаторы имеют и некоторые недостатки, к которым можно отнести относительно низкую удельную мощность и высокий уровень шумов, создаваемых при работе. Однако нельзя просто так выбрасывать неугодные комплектующие из стабилизатора. В этом случае мы рискуем потерять его функциональность. Чтобы этого не произошло, сначала нужно найти достойную замену. И на нашу удачу такая достоянная замена имеется. Еще в 70-х годах прошлого столетия была доказана возможность замены насыщающегося дросселя последовательной цепочкой, состоящей из линейного дросселя и двух встречно-параллельных тиристоров . Такая цепь ведет себя аналогично насыщающемуся дросселю, но в отличие от него имеет меньшие размеры и массу, может оперативно регулироваться за счет управления тиристорами, обеспечивает меньшие потери и, самое главное, гораздо меньше шумит. В технической литературе такая цепочка зачастую называется резонансным тиристорным регулятором (РТР) . При необходимости, два встречно-параллельных тиристора РТР можно с успехом заменить одним симистором.
Однако нельзя просто так выбрасывать неугодные комплектующие из стабилизатора. В этом случае мы рискуем потерять его функциональность. Чтобы этого не произошло, сначала нужно найти достойную замену. И на нашу удачу такая достоянная замена имеется. Еще в 70-х годах прошлого столетия была доказана возможность замены насыщающегося дросселя последовательной цепочкой, состоящей из линейного дросселя и двух встречно-параллельных тиристоров . Такая цепь ведет себя аналогично насыщающемуся дросселю, но в отличие от него имеет меньшие размеры и массу, может оперативно регулироваться за счет управления тиристорами, обеспечивает меньшие потери и, самое главное, гораздо меньше шумит. В технической литературе такая цепочка зачастую называется резонансным тиристорным регулятором (РТР) . При необходимости, два встречно-параллельных тиристора РТР можно с успехом заменить одним симистором.