
Широтно-импульсная модуляция (шим). аналоговая и цифровая
Импульсные источники питания
Импульсные источники питания (ИИП) также могут использовать ШИМ, хотя существуют и другие методы. Добавление схем, которые используют накопленную энергию в катушках индуктивности и конденсаторах, после основных переключающих компонентов может значительно повысить эффективность этих устройств, в некоторых случаях превышая 90%. Ниже приведен пример такой схемы.
Рисунок 5 – Пример импульсного источника питания, использующего ШИМ
Эффективность в этом случае измеряется как мощность. Если у вас есть импульсный источник питания с КПД 90%, и он преобразует 12 В постоянного напряжения в 5 В постоянного напряжения с током 10 ампер, то на стороне 12 В он будет потреблять ток примерно 4,6 А. 10% (5 Вт) будут выделяться в виде тепла. Будучи немного шумнее, этот тип стабилизаторов будет работать намного холоднее, чем его линейный аналог.
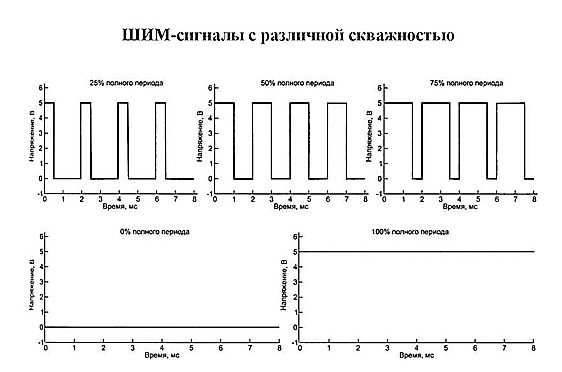
ШИМ – широтно-импульсная модуляция
Широтно-импульсная модуляция применяется в технике для преобразования переменного напряжения в постоянное, с изменением его среднего значения (Ud)
Управление средним значением напряжения происходит путем изменения скважности импульсов
Скважность – это отношение одного периода, к времени действия (длительности) импульса в нем.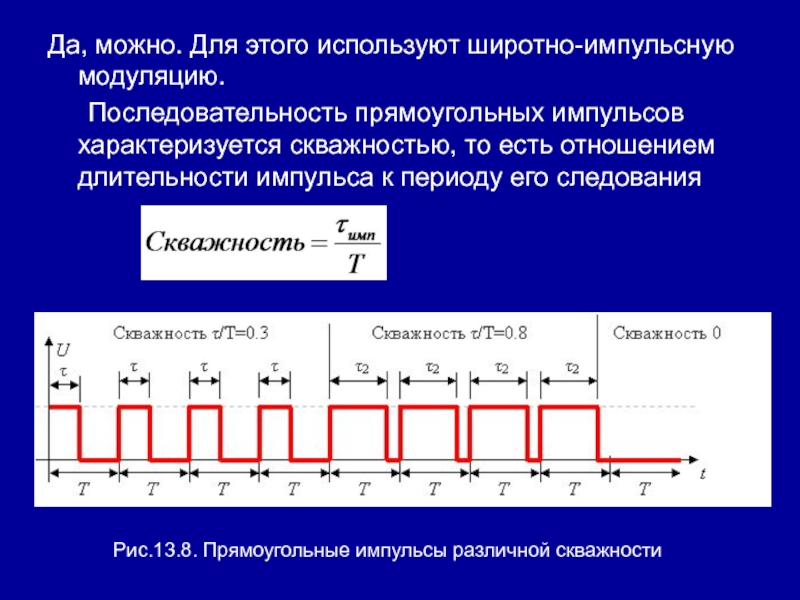 В англоязычной литературе часто встречается понятие коэффициент заполнения, который обратно пропорционален скважности
В англоязычной литературе часто встречается понятие коэффициент заполнения, который обратно пропорционален скважности
Формула скважности:
где T – длительность периода, с;
t – время действия импульса (длительность), с;
D – коэффициент заполнения.
То есть, не смотря на то, что скважность и коэффициент заполнения могут использоваться в одинаковом контексте, физический смысл их отличается. Эти величины безразмерны
Коэффициент заполнения обычно отображают в процентах (%).
Рисунок 1 – Скважность импульсов
На приведенном выше рисунке изображены импульсы, которые возникают с определенной периодичностью
Длительность импульса равна ¼ периода Т, это означает, что коэффициент заполнения равен 25%, а скважность – 4. Специфическое название имеется у набора импульсов c коэффициентом заполнения – 50%, такой сигнал называется меандр
Существуют цифровые и аналоговые ШИМ. Принцип их работы остается одинаковым вне зависимости от исполнения и заключается в сравнении двух видов сигналов:
Uоп – опорное (пилообразное, треугольное) напряжение;
Uупр – входное постоянное напряжение.
Cигналы поступают на компаратор, где они сравниваются, а при их пересечении возникает / исчезает (или становится отрицательным) сигнал на выходе ШИМ.
Выходное напряжение Uвых ШИМ имеет вид импульсов, изменяя их длительность, мы регулируем среднее значение напряжения (Ud) на выходе ШИМ:
Рисунок 2 – Скважность сигнала при однополярной ШИМ
Однополярная модуляция означает, что происходит формирование импульсов только положительной величины и имеет место нулевое значение напряжения. Осуществить такую модуляцию в некоторых схемах невозможно, преимущество однополярной модуляции: малое амплитудное значение высокочастотных гармоник.
В двухполярной модуляции вместо нулевого длительного напряжения формируется отрицательное напряжение, она проиллюстрирована на рисунке 4.
Преимущество использования ШИМ — это легкость изменения величины напряжения при минимальных потерях. Конечно же, можно, применять делитель напряжения, но его работа основана на применении резисторов, а на них происходит рассеивание энергии, что в свою очередь вызывает нагрев и неэкономичность (преобразование электрической энергии в тепловую).
Работа широтно-импульсного преобразователя реализуется с помощью полупроводниковых приборов – транзисторов. Максимальные потери на транзисторах бывают при их полуоткрытом состоянии. Поэтому используют два крайних положения: полностью открыты или закрыты, тогда потери минимальны. Частота срабатывания транзисторов очень большая, то есть переходные состояния имеют мало времени и потери, фактически, сводятся к нулю.
ШИМ нашел широкое применение как регулятор оборотов двигателей постоянного тока (ДПТ).
Рисунок 3 – Схема ШИМ регулятора для ДПТ
Схема ШИМ управления двигателя постоянного тока состоит из тиристорного преобразователя VS1÷VS6, сглаживающего конденсатора С. Транзисторы VT1÷VT4 реализуют подачу импульсного напряжения на двигатель постоянного тока М. С помощью обратных диодов VD1÷VD4, энергия будет отдаваться в сеть при торможении двигателя. Наличие в данной схеме четырех транзисторов дает возможность работы ДПТ во всех 4-х квадрантах механической характеристики.
Принцип работы схемы основан на двухполярной модуляции:
Рисунок 4 – Двухполярная широтно-импульсная модуляция
Недостаточно прав для комментирования
ШИМ – широтно-импульсная модуляция
ШИМ в преобладающем большинстве применяется для формирования сигнала синусоидальной формы. Часто ШИМ применяется для управления работой инверторного преобразователя. Инвертор предназначен для преобразования энергии постоянного тока в энергию переменного тока.
Рассмотрим простейшую схему инвертора напряжения.
В один момент времени открывается пара транзисторов VT1 и VT3. Создается путь для протекания тока от аккумулятора GB через активно-индуктивную нагрузку RнLн. В следующий момент VT1 и VT3 заперты, а открыты диагонально противоположные транзисторы VT2 и VT4. Теперь тока протекает от аккумулятора через RнLн в противоположном направлении. Таким образом, ток на нагрузке изменяет свое направление, поэтому является переменным. Как видно, ток на нагрузке не является синусоидальным.
Существует несколько типов ШИМ: однополярная, двухполярная, одностороння, двухсторонняя. Здесь мы не будем останавливаться на каждом конкретном типе, а рассмотрим общий подход.
В качестве модулирующего сигнала применяется синусоида, а опорным является сигнал треугольной формы. В результате сравнивания этих сигналов формируются длительности импульсов и пауз (нижний график), которые управляют работой транзисторов VT1…VT4.
Обратите внимание, что амплитуда напряжения на нагрузке всегда равна амплитуде источника питания. Также остается неизменным период следования импульсов
Изменяется лишь ширина открывающего импульса. Поэтому при подключении нагрузки ток, протекающий через нее, будет иметь синусоидальную форму (показано пунктиром на нижнем графике).
Так вот, основное отличие между ШИР и ШИМ заключается в том, что при широтно-импульсном регулировании время импульса и паузы сохраняют постоянное значение. А при широтно-импульсной модуляции изменяются длительности импульсов и пауз, что позволяет реализовать выходной сигнал заданной формы.
А при широтно-импульсной модуляции изменяются длительности импульсов и пауз, что позволяет реализовать выходной сигнал заданной формы.
2.2.7 Пример: периодическая последовательность прямоугольных импульсов
Пример: периодическая последовательность прямоугольных импульсов с амплитудой Е, длительностью и периодом Т (рис.5). Отношение называется скважностью последовательности. Такой сигнал не удовлетворяет условиям для функций, к которым применимо разложение в обобщенный ряд Фурье. Однако существующие реальные сигналы, близкие по форме к прямоугольным импульсам, удовлетворяют этим условиям. Поэтому для простоты можно заменить реальные почти прямоугольные импульсы идеализированными прямоугольными, хотя ряд Фурье для них плохо сходится в углах.
Итак, пусть , причем в течение периода сигнал можно описать выражением:
при
Рис. 5
5
Для упрощения вывода формулы для коэффициентов ряда Фурье, выберем такой интервал интегрирования, на котором сигнал, отличный от нуля расположен симметрично. Обозначим через t0 время, соответствующее середине импульса на одном из периодов (лучше ближайшем к началу отсчета). Тогда и на периоде имеем
.
;
Проведя преобразования, получим:
;
.
Аналогичные результаты гораздо проще получить с помощью коэффициентов для комплексного ряда Фурье. Действительно,
т.к. An=2Cn, то .
Соотношения для An легко привести к виду, удобному для построения АЧС, помножив и разделив его на , получим:
.
Учитывая, что , можно получить и следующее выражение:
.
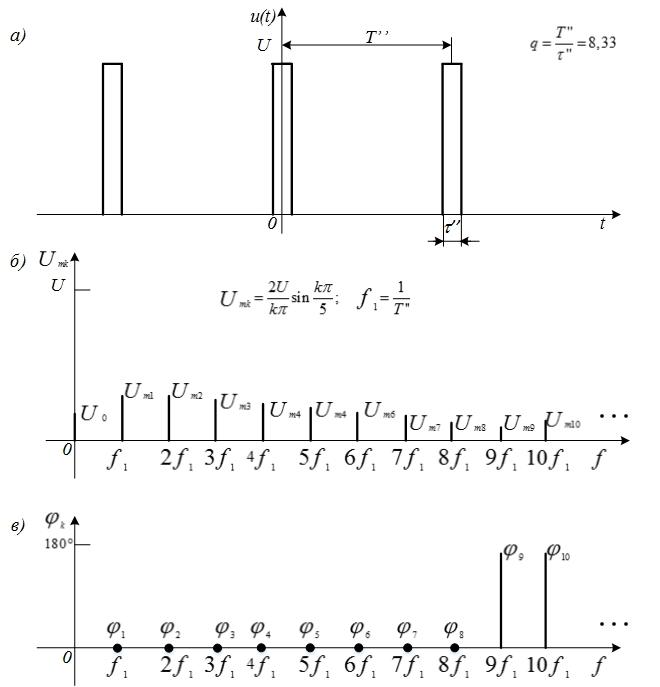
Так для q=2 («меандр») получаем следующие значения для амплитуд и фаз составляющих спектра:
и т.д.
(добавление величины обусловлено переходом синуса через нуль).
Таким образом, спектр меандра имеет вид рис. 6:
Рис. 6
Часто изменение знака синуса отражают на амплитудно-частотном спектре, показывая как бы отрицательное значение амплитуды. Тогда АЧС и ФЧС выглядят следующим образом (рис. 7):
Рис. 7
Если сигнал задан так, что t0=0, то все , и можно ограничиться только графиком АЧС с «отрицательными» амплитудами.
При увеличении скважности за счет, например,
увеличения периода при неизменном ,
амплитуды составляющих уменьшаются, расстояние между ними также уменьшается.
При произвольных значениях q и t0 удобнее воспользоваться построением огибающих АЧХ и ФЧХ. Заменим на текущее значение частоты . Получим
Построим график . Из соотношения для An видим, что огибающая меняет знак и, следовательно, проходит через нуль в точках, где , откуда определяем частоты прохождения огибающей АЧХ через нуль:
, где к=1, 2, 3, …
Частота, соответствующая k=1, называется первым нулем спектра. Если , то частота первого нуля равна , а если , то . Следующие нули огибающей спектра кратны этой величине. На частоте огибающая имеет максимум равный
,
откуда постоянная составляющая
.
Следующий максимум будет на частоте .
Величина огибающей на этой частоте равна
;
то есть второй максимум примерно в 5 раз
ниже максимума на нулевой частоте. Следующие максимумы уменьшаются пропорционально
частоте.
Следующие максимумы уменьшаются пропорционально
частоте.
Огибающая ФЧХ линейна и зависит от величины запаздывания или опережения середины импульса относительно t=0, т.е. .
Таким образом, графики огибающих можно нарисовать так, как пунктиром показано на рис.8.
Рис. 8
Для построения самого спектра (АЧС и ФЧС) достаточно на частотах, кратных , провести отрезки до пересечения с огибающей. Для меандра (q=2) в каждом лепестке огибающей (между нулями) будет лишь по одной ненулевой составляющей на частотах: и т.д. Постоянная составляющая . Все четные гармоники имеют в этом случае нулевые амплитуды. Можно амплитудный спектр построить без учета знака синуса во втором, четвертом и т.д. лепестках, в этом случае на этих частотах к следует добавить .
Параметры периодической последовательности импульсов
радиоликбез
Для периодической последовательности импульсов (рис, 151, а) свойственно следование импульсов через равные промежутки времени. Ее характеризуют следующие параметры.
Ее характеризуют следующие параметры.
Период следованияТи — интервал времени от момента появления одного импульса до момента появления следующего импульса той же полярности.
Частота следования Fи, являющаяся величиной, обратной периоду следования, т. е.
Длительность паузы Ти — время между моментом окончания одного импульса и началом другого:
Скважность импульсов Q, определяемая как отношение периода следования Ти к длительности tи
Среднее значение импульсного тока (напряжения) получается, если ток (напряжение) импульса равномерно распределить на весь период так, чтобы площадь прямоугольника IсрTи (рис. 151,б) была равновелика площади импульса Sи
|
Коэффициент заполнения — величина, обратная скважности, показывающая, какую часть периода занимает импульс: |
|
Рис. а — прямоугольных, б — колоколообразных |
 151. Периодическая последовательность импульсов:
151. Периодическая последовательность импульсов:Средняя мощность PСр определяется отношением энергии W, выделенной в цепи за период следования импульса Tи, к длительности этого периода:
Очевидно, РсрТи=Pиtи, откуда
Электронные приборы для импульсных схем очень часто выбирают по средней мощности.
Читайте также: Общая характеристика импульсного сигнала
Прохождение импульсов через линейные цепи
Преобразователь частоты для электродвигателя
30.10.2017
Тематика: Полезная информация
Введение
Существует немало технологических операций, нуждающихся в регулировании угловых скоростей приводных валов механизмов. Традиционно эта задача решалась двумя путями:
- применением механических многоскоростных редукторов для ступенчатого регулирования скорости, либо вариаторов для плавного регулирования;
- использованием электродвигателей постоянного тока совместно с регуляторами уровня питающего напряжения.

Регулирование угловой скорости ротора, основанное на изменении передаточного числа механической трансмиссии, характеризуется снижением общего КПД передачи. Это объясняется высоким уровнем механических потерь в редукторе, подверженном к тому же, интенсивному износу.
Двигатели постоянного тока представляют собой достаточно сложные и дорогие машины. Наличие коллекторного механизма со щёточным аппаратом, предъявляет повышенные требования к их обслуживанию и снижает надёжность.
Компания Овердрайв-Электро предлагает частотно-регулируемые приводы ABB со склада в Минске:
Принцип частотного регулирования
В основе частотного регулирования двигателя переменного тока лежит взаимосвязь угловой скорости, с которой вращается поле статора с частотой напряжения питания. Это означает, что изменение частотной характеристики напряжения статора приводит к пропорциональному изменению угловой скорости вращающегося ротора.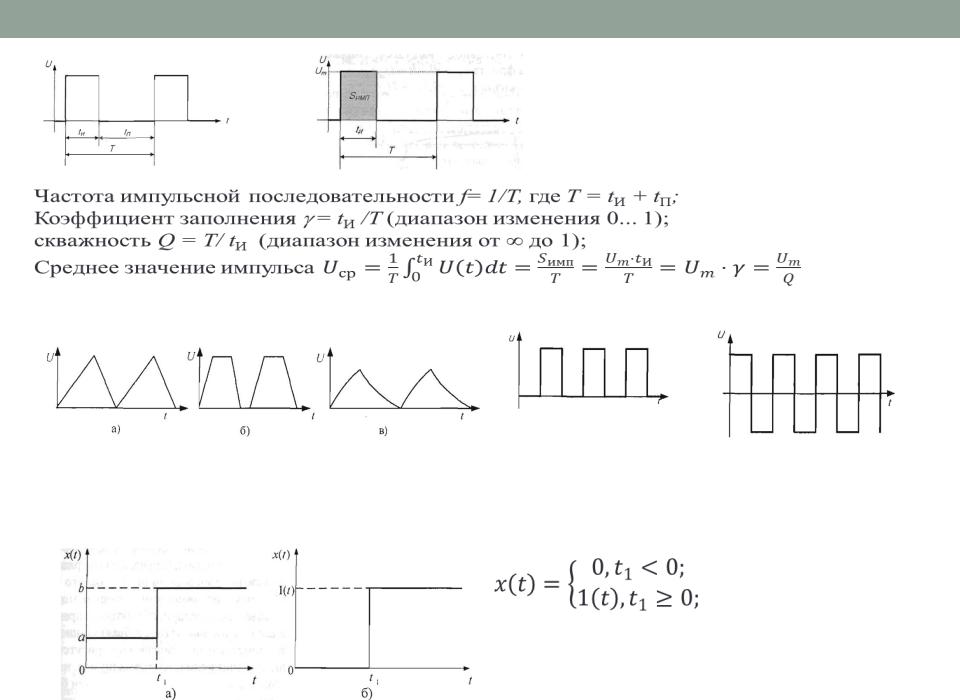 Угловая скорость, или частота вращающегося поля статора асинхронного электрического двигателя выражается следующим соотношением:
Угловая скорость, или частота вращающегося поля статора асинхронного электрического двигателя выражается следующим соотношением:
ω0 = 2πf1/р,
где f1 — значение частоты напряжения, питающего обмотку статора, р — количество полюсных пар статорной обмотки.
Из приведенной формулы следует, что совершая изменение значения частоты подводимого к двигателю напряжения, можно плавно изменять значение угловой скорости (частоты) вращающегося поля статора, что приведёт к изменению частоты вращения ротора электродвигателя.
Данный принцип позволяет использовать в регулируемых приводах наиболее технологичные, простые и надёжные асинхронные двигатели, имеющие короткозамкнутый ротор. Благодаря высоким технико-экономическим показателям систем частотного регулирования происходит их активное внедрение в сферу промышленной и бытовой техники.
Устройство преобразователя частоты.
На рисунке 1 показана структурная схема, иллюстрирующая устройство преобразователя частоты (ПЧ).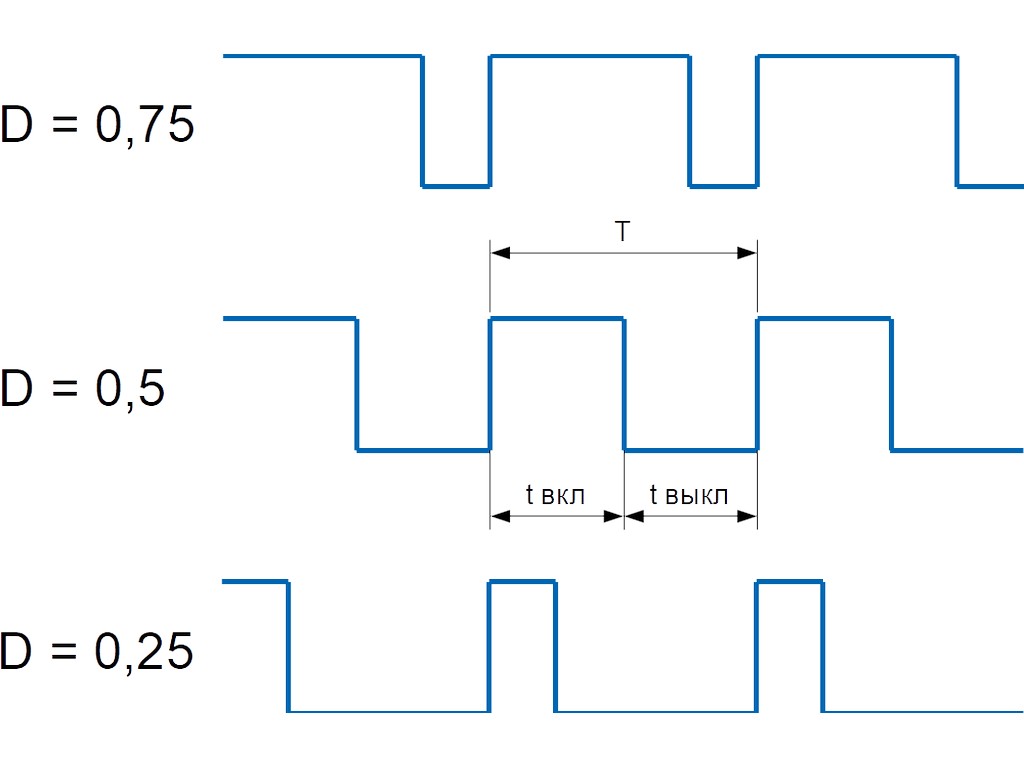
Рис.1 Преобразователь частоты
Сетевое питающее напряжение промышленной частоты 50 герц поступает на вход выпрямителя (В), представляющего собой обычную мостовую диодную сборку. На выходе выпрямителя установлен Г — образный LC фильтр, выполняющий функции сглаживания пульсаций, которые присутствуют в выпрямленном напряжении.
Основной частью преобразователя является инвертор (И), осуществляющий преобразование постоянного напряжения в трёхфазную систему напряжений синусоидальной формы с регулируемой частотой и амплитудой. Ключевыми элементами инвертора служат мощные IGBT транзисторы, которые коммутируются сигналами, генерируемыми в системе импульсно — фазового управления. Система управления транзисторами, формирующими выходное напряжение, которое поступает на статор асинхронного двигателя (АД), основана на принципе ШИМ — широтно-импульсной модуляции. Сигнал управления представляет собой чередование импульсов напряжения с изменяемой скважностью.
Примечание. Скважность — это оценочная характеристика периодического импульсного сигнала, рассчитываемая как отношение периода чередования сигнала к длительности импульса. То есть, величина скважности показывает, какую часть периода занимают импульсы. При изменении скважности изменяется соотношение длительностей импульсов и промежутков между ними.
Следует обратить внимание на одну интересную особенность частотных преобразователей. На рисунке 1 показан преобразователь, подключенный к трёхфазной сети. Существуют модели преобразователей, питающихся от однофазной сети, при этом, на выходе инвертора формируется всё та же трёхфазная система. Разница между трёхфазными и однофазными частотными преобразователями заключается только в качестве напряжения на выходе выпрямителя. Трёхфазный выпрямительный мост создаёт меньший уровень пульсаций напряжения, по этой причине, однофазное выпрямление предъявляет повышенные требования к параметрам LC фильтра.
Применение частотных преобразователей
Сегодня трудно найти область, где не нашли своего применения частотно-регулируемые приводы асинхронных электродвигателей.
На крупных блочных электрических станциях частотные регуляторы осуществляют регулирование подачи топлива в котлы, гибко адаптируя работу энергоблоков к изменяющемуся режиму работы энергосистемы. В этом качестве частотные приводы функционируют как исполнительные звенья автоматизированной системы управления технологическими процессами электростанции.
Частотное регулирование приводов мощных вентиляторов промышленных систем позволяет автоматически поддерживать оптимальные условия их работы при изменении внутренних и внешних факторов, экономя при этом электрическую энергию и продлевая ресурс оборудования.
Большую финансовую экономию принесло внедрение частотных регуляторов в городские системы водоснабжения. Рабочее давление в водоводах питьевого назначения ранее поддерживалось в основном путём оперирования задвижками. Это приводило к неэффективной работе насосного оборудования, повышенному расходу энергии и износу. Насосы, оснащённые частотным приводом способны гибко реагировать на изменение расхода воды в системе и изменяя частоту вращения поддерживать необходимое давление.
Применение частотных регуляторов не обошло стороной и область бытовой электротехники. Все современные стиральные машины и пылесосы оснащены частотным приводом. Это позволило отказаться от редукторов и ремённых приводов и повысить экономичность работы домашних агрегатов.
Импульсный погодный компенсатор для элеваторных систем отопления | Архив С.О.К. | 2013
Рис. 1. Зависимость скважности управляющих импульсов от температуры воздуха
Рис. 2. Схема первого варианта импульсной системы управления
Рис. 3. Схема второго варианта импульсной системы управления
В работе рассматривается проблема управления тепловым режимом здания (ТРЗ) с элеваторной схемой присоединения к тепловым сетям. Предлагается применение прерывистого отопления, реализуемого не с помощью двухпозиционного регулятора и погодного графика или обратной связи по температуре внутреннего воздуха tв, а в режиме импульсного управления системой отопления. В работе [1] указывается, что «…при двухпозиционном (прерывистом) регулировании… регулирующим воздействием является… период включения (отключения) нагревательных приборов…». В том случае, когда фактическая мощность системы отопления Wсо при данных значениях параметров теплоносителя и температуры наружного воздуха является избыточной, в здании устанавливается некоторая температура tвmax, которая будет заметно превышать свое заданное значение tвз .
В том случае, когда фактическая мощность системы отопления Wсо при данных значениях параметров теплоносителя и температуры наружного воздуха является избыточной, в здании устанавливается некоторая температура tвmax, которая будет заметно превышать свое заданное значение tвз .
При этом подчеркнем, что такая ситуация может иметь место не только в период «срезки» температурного графика регулирования, но и в любой другой период, так как «…построение графика ориентировано на обезличенное здание… при расчетной температуре внутреннего воздуха 18 °C…» [2] и в связи с этим погодный график для конкретного здания может быть «плохим». Здесь с целью экономии расхода теплоты на отопление и обеспечения приемлемых внутренних климатических условий может применяться импульсный режим отопления зданий, при котором в течение некоторого периода длительностью T система отопления на время γT включается на полную мощность Wсо, а затем полностью отключается до конца периода.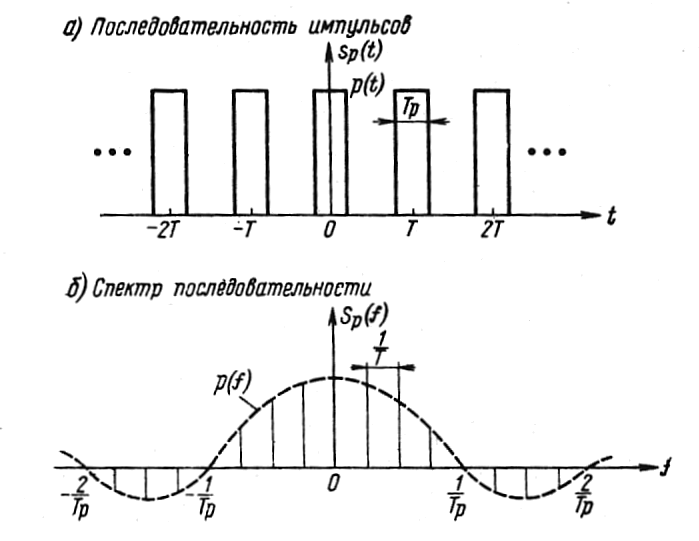
При этом возникает вопрос: как следует выбирать длительность периода T и скважность импульсов γ, чтобы температура внутри здания поддерживалась в заданных пределах? Скважность γ можно определить с помощью следующих соображений. Понятно, что в стационарном режиме мощность системы отопления Wсо должна равняться теплопотерям здания при той температуре, которая установилась внутри него, и при той температуре, которая наблюдается снаружи. Если потери теплоты оценивать по формуле Н. С. Ермолаева, то для случая, когда система отопления мощностью Wсо работает в режиме постоянного включения:
Wсо = qV(tвmax – tн)V, (1)
здесь qV — удельная тепловая характеристика здания, а V — его объем; tн — температура наружного воздуха. Если скважность импульсов подобрана должным образом, то
γWсо = qV(tвз – tн)V, (2)
где γWсо — средняя за период T мощность системы отопления в импульсном режиме. Разделив уравнение (2) на уравнение (1), получим, что скважность импульсов следует определять так:
Разделив уравнение (2) на уравнение (1), получим, что скважность импульсов следует определять так:
Температуру tвmax можно вычислить по математической модели теплового режима здания, которая, очевидно, предварительно должна быть настроена на реальный процесс. В частности, это можно сделать и по уравнению (1), которое представляет собой математическую модель стационарного режима. Для этого только нужно иметь в виду, что мощность системы отопления можно определить по следующей формуле:
где tсо — температура воды на входе системы отопления (после элеваторов), c — удельная теплоемкость теплоносителя; Gсо — массовый расход теплоносителя через систему отопления; (kF)со — произведение коэффициента теплопередачи на площадь поверхности теплообмена для всей системы отопления, это тот параметр, который подлежит определению при идентификации модели системы отопления. Подставляя данное выражение в формулу (1), найдем из него формулу для вычисления tвmax:
а затем и требуемую скважность управляющих импульсов γ:
Как это видно из формулы (6) скважность управляющих импульсов γ является функцией температуры наружного воздуха tн, заданного значения температуры внутреннего воздуха tвз , температуры воды на входе системы отопления tсо и расхода воды через систему отопления здания Gсо.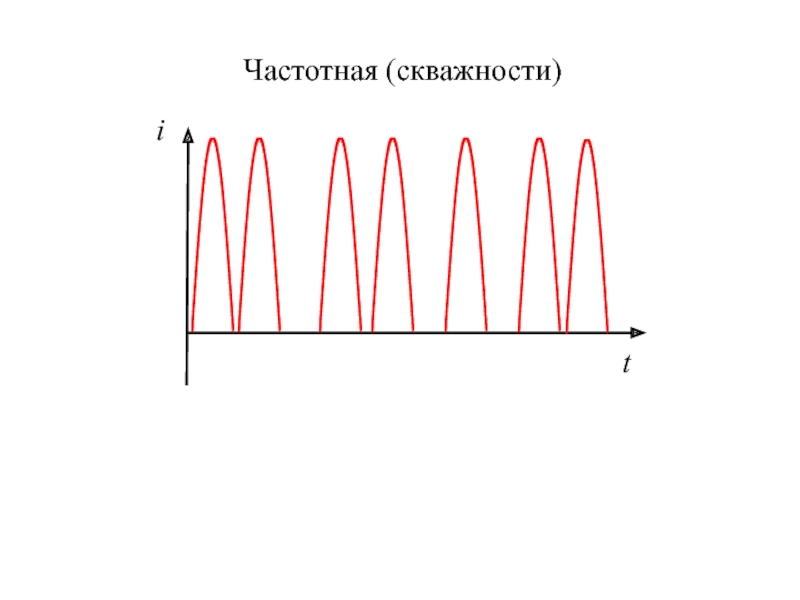 Кроме того, γ также зависит и от характеристики системы отопления — параметр (kF)со, и от теплозащитных свойств и размеров здания, а именно, от параметра qVV.
Кроме того, γ также зависит и от характеристики системы отопления — параметр (kF)со, и от теплозащитных свойств и размеров здания, а именно, от параметра qVV.
На рис. 1 приведены кривые зависимости скважности управляющих импульсов γ от температуры наружного воздуха tн для трех значений температуры на входе системы отопления tсо: кривая 1 для tсо = 70 °C, кривая 2 для tсо = 50 °C и кривая 3 для tсо = 30 °C. При этом вычисления производились по формуле (6) при qV = 0,168 Вт/ (м3⋅°C), (kF)со = 1680 Вт/ °C, tвз = 18 °C, V = 1700 м3, Gсо = 1,57 кг/с.
Как видно из рис. 1, с увеличением температуры наружного воздуха tн скважность управляющих импульсов γ уменьшается, что и ожидалось. Анализ формулы (6) и прямые вычисления по ней показали, что скважность управляющих импульсов γ растет в случаях: с увеличением параметра qVV, то есть с ухудшением теплозащитных свойств здания; с уменьшением параметра (kF) со, то есть с ухудшением теплотехнических характеристик системы отопления и, вследствие этого, ее мощности при прочих равных условиях; с уменьшением расхода воды Gсо через систему отопления. Для вычисления γ, как это видно из формулы (6), требуется измерять tн — температуру наружного воздуха, tсо — температуру и расход Gсо воды на входе системы отопления (после элеваторов или каких-либо других нерегулируемых узлов смешения).
Для вычисления γ, как это видно из формулы (6), требуется измерять tн — температуру наружного воздуха, tсо — температуру и расход Gсо воды на входе системы отопления (после элеваторов или каких-либо других нерегулируемых узлов смешения).
Схема такой системы управления приведена на рис. 2. Возможно, что более предпочтительным будет измерение tc — температуры и расхода Gc сетевой воды в подающей магистрали, в этом случае мощность системы отопления Wсо следует выразить через температуру tc, как это сделано в работе [3]. Тогда данная формула будет иметь следующий вид:
где χ — коэффициент смешения. Схема системы управления для этого случая приведена на рис. 3. При реализации предлагаемого способа следует иметь в виду, что его эффективность во многом зависит от точности модели, отражающей влияние возмущения на выходную величину объекта управления, то есть от характеристик канала «температура наружного воздуха — регулируемая температура».
Хорошо известно, что эти характеристики заметно меняются, например, из-за старения здания и его системы отопления, при накоплении влаги в ограждающих конструкциях и т.п. Поэтому вполне понятно, что для построения высококачественной системы управления необходимо своевременно отслеживать изменение этих характеристик, то есть решать задачу идентификации модели канала. Способы решения данной проблемы подробно изложены в работе [4]. Длительность периода T, позволяющую достигать заданного качества процесса управления, следует определять по способу работы [5]. Разработан способ импульсного управления температурным режимом зданий с элеваторным присоединением систем отопления.
Приводятся два варианта структуры системы управления и процедуры вычисления скважности управляющих импульсов по данным измерения либо температуры сетевой воды и ее расхода, либо теплоносителя на входе системы отопления и его расхода в ней. Отличительной особенностью предлагаемого решения является то, что для его реализации не имеет принципиального значения точность и вообще наличие погодного графика теплоснабжения, важно только то, чтобы потенциал сетевой воды был бы достаточен для достижения требуемого значения температуры внутреннего воздуха.
ИССЛЕДОВАНИЕ ХАРАКТЕРИСТИК ТОРМОЗНОГО ИЗЛУЧЕНИЯ МЕДИЦИНСКОГО УСКОРИТЕЛЯ ДЛЯ КОМПЛЕКСА ЛУЧЕВОЙ ТЕРАПИИ КЛТ-6. Л.Ю. Овчинникова1,
Т.В. Бондаренко2, И.Л. Дергачева2,
А.Н. Ермаков1, В.В. Ханкин1,
В.И. Шведунов1, Д.С. Юров1 В ускоряющей системе медицинского ускорителя установлена
тормозная мишень, что исключает возможность работы с выведенным пучком
электронов. Для получения данных об ускоренном пучке электронов используются
косвенные методы, основанные на измерении характеристик тормозного излучения. Рис. 1. Структурная схема стенда. 1 – ускоряющая
структура, 2 – электронная пушка, 3 – катод пушки, 4 – управляющий электрод
пушки, 5 – тормозная мишень, 6 – питающий волновод, 7- – вакуумное
высокочастотное окно, 8 – электроразрядный вакуумный насос, 9 – высокочастотная
антенна (петля связи), 10 – магнитный экран, 11 – радиационная защита, 12 –
коллиматор, 13 – блок питания электроразрядных насосов ускоряющей структуры и
клистрона, 14 – система высокочастотного питания, 15– система подачи
изолирующего газа, 16 – модулятор, 17 – система питания пушки, 18 – система
распределения охлаждающей жидкости, 19 – модуль охлаждения, 20 – система
контроля и управления, 21 – панель управления, 22 – блок питания собственных
нужд, 23 –рама, 24 – блокировка безопасности, 25 – электропитание, 26 –
удалённый контроль.
Рис. 3. Измерение верхней границы спектра тормозного излучения. 1 – ускоряющая система, 2 – радиационная защита с коллиматором, 3 – поглощающий барьер, 4 – устройство перемещения, 5 – ионизационная камера, 6 – коллиматор ионизационной камеры, 7 – дозиметр ДКС 101. Измерение мощности дозы тормозного излучения
осуществлялось с помощью дозиметра ДКС-101 [1] с ионизационной
камерой объёмом 0.6 см3. Оценка верхней границы спектра
тормозного излучения, совпадающей с кинетической энергией ускоренных
электронов, проводилась известным методом поглощающего барьера,
позволяющим оценить граничную энергию спектра, измеряя степень
ослабления мощности дозы при прохождении излучения через поглощающий
барьер.
где k – энергия квантов тормозного
излучения, S(E0, k) – спектр тормозного излучения Шиффа [3] под углом
близким к 0° с учётом поглощения в тормозной мишени, в слое воздуха толщиной L и
в иных препятствиях, расположенных на пути пучка, за исключением поглощающего
барьера, μ(k) и μвозд(k), – линейные коэффициенты поглощения
материала барьера и воздуха ионизационной камеры, соответственно [4]. Для определения энергии на графике проводится линия
параллельная оси абсцисс на уровне Tэксп, находится точка
пересечения с кривой Tрасч(Ее) и находится значение Ее,
соответствующее точке пересечения. На Рис. 5 показаны спектры пучка для нормировки поля, обеспечивающей энергию в максимуме спектра около 5.5 МэВ, для трёх значений энергии инжекции 23, 25 и 27 кэВ. В Таблице 1 суммированы данные по величинам средней энергии, энергии максимума спектра и энергия, оценённая по проницаемости барьера. Таблица 1. Характеристики пучка для трёх энергий инжекции.
Как следует из приведённых данных, с ростом энергии
инжекции энергия максимума спектра не изменяется, однако при этом происходит
увеличение средней энергии пучка за счёт концентрация частиц вблизи максимума
спектра. Подобное изменение характера спектра вполне подходит для
рассматриваемой в данной работе модельной задачи. Следует подчеркнуть, что при
расчёте ускорителя и расчёте затрат СВЧ мощности на достижение заданной энергии
за основу берётся именно энергия максимума спектра.
где Emax – энергия
верхней границы спектра электронов, N – число разбиений гистограммы спектра, αi –
доля электронов с энергией Ei в спектре,
. Рис. 6. Спектры тормозного излучения: зелёная кривая – монохроматический пучок с энергией равной энергии максимума спектра (5.5 МэВ), чёрная, синяя и красная кривые – соответственно, для энергий инжекции 23, 25 и 27 кэВ. На Рис. 6 показаны спектры тормозного излучения,
рассчитанные для монохроматического пучка с энергией равной энергии максимума
спектра электронов, а также для спектров электронов для энергий инжекции 23, 25
и 27 кэВ, показанных на Рис. 5. Таким образом, как следует из результатов расчётов,
выполненных для трёх различных спектров пучка электронов, оценка энергии методом
проницаемости барьера зависит от формы спектра и ближе к средней энергии, нежели
к энергии максимума спектра, которая в расчётах динамики пучка и оценке затрат
СВЧ мощности на создание ускоряющего поля рассматривается в качестве основной
характеристики. Для конкретных спектров, рассмотренных в данном разделе, оценка
энергии на 3% – 4% выше средней энергии и на 8 – 11% ниже энергии максимума
спектра.
В целом, эта зависимость близка к расчётной, представленной на Рис. 9. Измерения проводились с экземпляром клистрона,
отличающимся по параметрам от клистрона, использовавшегося на стенде измерений
характеристик электронного пучка. Его максимальная выходная СВЧ мощность
составляла 2.9 МВт при UHVPS = 1300 В.
С учётом формул (1) и (1а) имеем следующую расчётную зависимость мощности дозы от мощности клистрона и тока пушки:
Измерения, результаты которых приведены ниже, проводились для различных уровней мощности клистрона при изменении тока пушки в широких пределах, соответственно, при значительном изменении энергии. В этой связи, из-за зависимости эффективного шунтового сопротивления и коэффициента захвата от энергии для расчёта мощности дозы по формуле (5) необходимо решать нелинейное уравнение.
Зависимость мощности дозы от тока ускоренного пучка, IgunKcapt(E), определяется конкуренцией двух факторов – возрастанием тока и снижением энергии из-за нагрузки током пучка. В качестве иллюстрации на Рис. 10 приведены результаты расчёта зависимости мощности дозы и энергии пучка от ускоренного тока для двух значений коэффициента связи в предположении независимости коэффициента захвата и эффективного шунтового сопротивления от энергии. На Рис.
На Рис. 13 показаны результаты измерения верхней границы тормозного спектра методом поглощающего барьера в зависимости от UHVPS для тока пуки 235 мА и в зависимости от тока пушки для UHVPS = 1300 В. Выход на проектную энергию 6 МэВ при максимальной мощности клистрона возможен при токе пушки не более 100 мА.
| |||
 Целью экспериментов, описанных в данной работе, было измерение основных
характеристик тормозного излучения – мощности дозы и верхней границы спектра.
Структурная схема стенда показана на Рис. 1, фото стенда – на Рис. 2.
Целью экспериментов, описанных в данной работе, было измерение основных
характеристик тормозного излучения – мощности дозы и верхней границы спектра.
Структурная схема стенда показана на Рис. 1, фото стенда – на Рис. 2.


 Однако, при
проведении сравнения измеренной энергии с энергией, полученной, в результате
расчёте динамики пучка в ускоряющей структуре при определённых затратах СВЧ
мощности, возникает неопределённость в интерпретации результатов, обусловленная
немонохроматичностью пучка электронов линейного ускорителя.
Однако, при
проведении сравнения измеренной энергии с энергией, полученной, в результате
расчёте динамики пучка в ускоряющей структуре при определённых затратах СВЧ
мощности, возникает неопределённость в интерпретации результатов, обусловленная
немонохроматичностью пучка электронов линейного ускорителя.
 06
06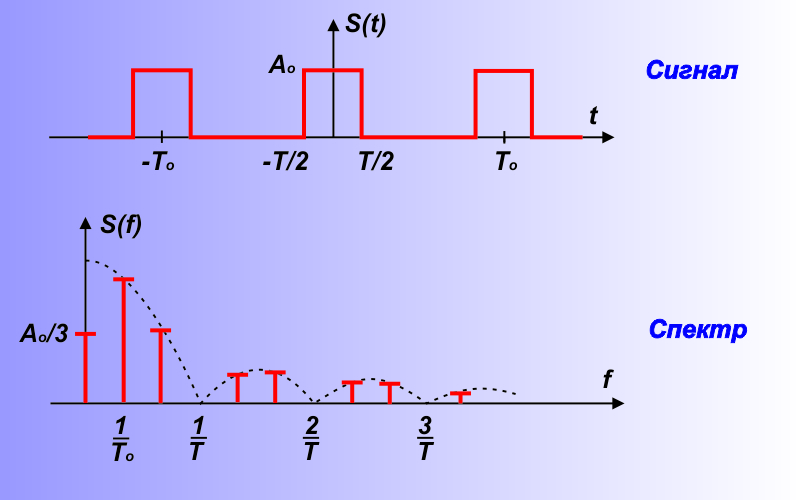
 Нами были проведены измерения мощности дозы для различных
уровней выходной мощности клистрона и тока электронной пушки. Изменение тока
электронной пушки обеспечивалось изменением напряжения на управляющем электроде.
На Рис. 9 показана измеренная вольтамперная характеристика электронной пушки.
Изменения проводились при напряжении на катоде -25 кВ. Зависимость тока пушки от
напряжения на управляющем электроде, UCE, описывается выражением:
Нами были проведены измерения мощности дозы для различных
уровней выходной мощности клистрона и тока электронной пушки. Изменение тока
электронной пушки обеспечивалось изменением напряжения на управляющем электроде.
На Рис. 9 показана измеренная вольтамперная характеристика электронной пушки.
Изменения проводились при напряжении на катоде -25 кВ. Зависимость тока пушки от
напряжения на управляющем электроде, UCE, описывается выражением: С учётом измеренных значений
КПД и первеанса, выходная мощность данного экземпляра клистрона зависела от
значения UHVPS приблизительно следующим образом:
С учётом измеренных значений
КПД и первеанса, выходная мощность данного экземпляра клистрона зависела от
значения UHVPS приблизительно следующим образом: 10. Результаты расчёта зависимости мощности дозы
(а) и энергии пучка (б) от ускоренного тока при
постоянном значении эффективного шунтового сопротивления
для мощности клистрона 3 МВт и двух значений
коэффициента связи ускоряющей структуры с питающим
волноводом.
10. Результаты расчёта зависимости мощности дозы
(а) и энергии пучка (б) от ускоренного тока при
постоянном значении эффективного шунтового сопротивления
для мощности клистрона 3 МВт и двух значений
коэффициента связи ускоряющей структуры с питающим
волноводом. 11 приведены результаты измерения мощности дозы на
расстоянии 1 м от тормозной мишени в зависимости от напряжения на управляющем
электроде для различных значений напряжения модулятора. Измерения проводились
при скважности около 6000. Следует отметить, что в соответствии с формулой (3)
значению, UCE = 500 В соответствует ток пушки около 22 мА,
11 приведены результаты измерения мощности дозы на
расстоянии 1 м от тормозной мишени в зависимости от напряжения на управляющем
электроде для различных значений напряжения модулятора. Измерения проводились
при скважности около 6000. Следует отметить, что в соответствии с формулой (3)
значению, UCE = 500 В соответствует ток пушки около 22 мА, 🏠 Интернет Всего 🚗 – ОУ
Published: Пн. 05 Декабрь 2016 By Oleg MazkoIn Electronics.
tags: gEDA ngspice ОУ ШИМ
Продолжаем осваивать NGSPICE вообще и ОУ в частности.
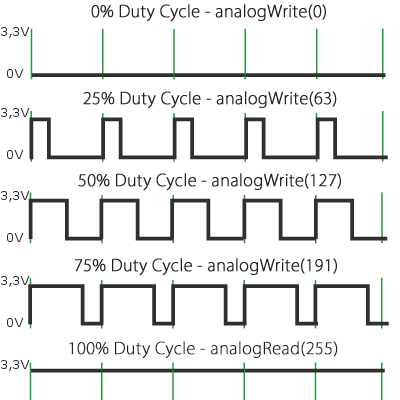
Для периодических прямоугольных импульсов можно выделить три главных параметра: амплитуда, частота и т.н. коэффициент заполнения (duty cycle) – некая безразмерная физическая величина равная отношению длительности импульса к его периоду. Скважность характеризует то же самое свойство, что и коэффициент заполнения, просто это обратная величина S = 1/D, где S – скважность, D – коэффициент заполнения от 0 до 100%. Если длина импульса равна половине периода, то такой симметричный сигнал называется меандром. Чем больше коэффициент заполнения, тем большая средняя мощность передаётся от источника к нагрузке и так вплоть до 100% (постоянное напряжение на нагрузке). Поскольку цепь работает по принципу включён/выключен, то отсутствуют потери при передаче энергии и в результате управляя скважностью можно регулировать мощность на нагрузке от 0 до 100% с очень высоким коэффициентом полезного действия (КПД). Говоря более формальным языком мы имеем дело с широтно-импульсной модуляцией (ШИМ, англ. pulse-width modulation (PWM)) – процессом управления мощностью, подводимой к нагрузке, путём изменения скважности импульсов при постоянной частоте.
В следующих схемах использовалась SPICE модель операционного усилителя LT1007:
~$ wget http://cds.linear.com/docs/en/software-and-simulation/LT1007CS.txt
линейный преобразователь напряжение – скважность | netlist | ngspice.js
ngspice 1 -> source comparator-single.net ngspice 2 -> tran 10m 4 ngspice 3 -> plot v(out) v(triangle)
В основе лежет очень простая идея – сигнал с генератора треугольных импульсов поступает на вход компаратора. Задавая опорное напряжение компаратора нарезаются подобные треугольники (углы равны). Как мы знаем (да да) из школьного курса по геометрии подобные треугольники характеризуются коэффициентом подобия k, равным отношению сходственных сторон. При этом отношение длин высот также равно коэффициенту подобия. В нашем случае высота это опорное напряжение компаратора, она опущена на сторону треугольника, которая является периодом следования треугольных импульсов.-8) = 500 Гц
Далее стабилизаторы напряжения
There are comments.
Руководство по разработке радиоэлектронных средств и радиолокационных систем – Рабочий цикл
[Перейти к TOC]
РАБОЧИЙ ЦИКЛ
Рабочий цикл (или коэффициент заполнения) – это доля времени, в течение которого радар передает данные. Это важно, потому что это относится к пиковому и средняя мощность при определении общей выходной энергии. Это, в свою очередь, в конечном итоге также влияет на силу отраженного сигнала. как требуемая мощность источника питания и требования к охлаждению передатчика.
Хотя бывают исключения, большинство радиочастот (RF) измерения могут быть либо непрерывными (CW), либо импульсными RF. CW RF – это непрерывный RF, такой как от генератора. Амплитудно-модулированная (AM), RF с частотной модуляцией (FM) и фазовой модуляцией (PM) считаются CW, поскольку RF присутствует постоянно. Мощность может меняться со временем из-за модуляции, но RF присутствует всегда. Импульсный РЧ, с другой стороны, представляет собой всплески (импульсы) РЧ без РЧ между всплесками.Большинство Общий случай импульсного РЧ состоит из импульсов фиксированной ширины импульса (PW), которые приходят с фиксированным интервалом времени или периодом (T). Для ясности и Для упрощения этого обсуждения предполагается, что все РЧ-импульсы в серии импульсов имеют одинаковую амплитуду. Импульсы поступают с фиксированным интервалом времени со скоростью или частотой, называемой частотой повторения импульсов (PRF), так много импульсов в секунду. Интервал повторения импульсов (PRI) и PRF взаимны друг с другом.
[1] PRF = 1 / T = 1 / PRI
Измерения мощности классифицируются как пиковая импульсная мощность, P p , или средняя мощность, P , среднее значение .В фактическая мощность в импульсном ВЧ-диапазоне возникает во время импульсов, но большинство методов измерения мощности измеряют тепловые эффекты ВЧ-энергии для получения среднее значение мощности. Правильно использовать любое значение для справки, если одно или другое используется последовательно. Часто необходимо преобразовать P p в P ave или наоборот; поэтому необходимо понимать отношения между ними. На рисунке 1 показано сравнение между P , p и P , пр. .
Рис. 1. Последовательность ВЧ-импульсов
Среднее значение определяется как уровень, на котором площадь импульса выше среднего равна площади ниже среднего между импульсами. Если
импульсы выравниваются таким образом, чтобы заполнить область между импульсами, полученный уровень является средним значением, как показано на рисунке 1, где
заштрихованная область импульса используется для заполнения области между импульсами. Площадь импульса – это ширина импульса, умноженная на пиковый импульс.
власть.Средняя площадь равна среднему значению мощности, умноженному на период импульса.
Начиная с два значения равны:
[2] P ср. x T = P p x PW
или
[3] P пр. / P p = PW / T
Использование [1]
[4] P пр. / P p = PW / T = PW x PRF = PW / PRI = рабочий цикл
(обратите внимание, что символ τ представляет ширину импульса (PW) в большинстве справочников)
Отношение средней мощности к пиковой мощности импульса представляет собой рабочий цикл и представляет собой процент времени, в течение которого мощность присутствует.в В случае прямоугольной волны коэффициент заполнения составляет 0,5 (50%), так как импульсы присутствуют 1/2 времени, определение прямоугольной волны.
Для На рис. 1 ширина импульса составляет 1 единицу времени, а период – 10 единиц. В этом случае рабочий цикл составляет:
PW / T = 1/10 = 0,1 (10%).
Более типичным случаем будет частота повторения импульсов 1000 и ширина импульса 1,0 микросекунда. Используя [4], рабочий цикл составляет 0,000001 x 1000 = 0,001. В ВЧ-мощность присутствует в тысячных раз, а средняя мощность равна 0.001 раз пиковая мощность. И наоборот, если бы мощность измерялась с измеритель мощности, который реагирует на среднюю мощность, пиковая мощность будет в 1000 раз больше среднего значения.
Помимо выражения рабочего цикла как отношение, полученное в уравнении [4], обычно выражается либо в процентах, либо в децибелах (дБ). Чтобы выразить рабочий цикл уравнения [4] в процентах, умножьте полученное значение на 100 и добавьте символ процента. Таким образом, рабочий цикл 0,001 также равен 0.1%.
Долг цикл может быть выражен логарифмически (дБ), поэтому его можно добавлять или вычитать из мощности, измеренной в дБм / дБВт, а не преобразовывать в, и с использованием абсолютных единиц.
[5] Рабочий цикл (дБ) = 10 log (рабочий цикл ratio)
Для примера рабочего цикла 0,001 это будет 10 log (0,001) = -30 дБ. Таким образом, средняя мощность будет на 30 дБ меньше, чем пиковая мощность. И наоборот, пиковая мощность на 30 дБ выше средней мощности.
Для импульсных радаров, работающих в диапазоне ЧСС 0,25-10 кГц и радары частичного разряда, работающие в диапазоне PRF 10-500 кГц, типичные рабочие циклы будут:
Импульс: 0,1 – 3% = 0,001 – 0,03 = от -30 до -15 дБ
Импульсный допплер: 5-50% = 0,05 – 0,5 = от -13 до -3 дБ
Непрерывная волна: 100% = 1 = 0 дБ
Промежуточная полоса частот типичных сигналов:
Импульс От 1 до 10 МГц
ЛЧМ или фазово-кодированный импульс 0.От 1 до 10 МГц
CW или PD От 0,1 до 5 кГц
PRF обычно подразделяется на следующие категории: низкая 0,25–4 кГц; Средний 8-40 кГц; Высокие 50-300 кГц.
Содержание руководства по электронной войне и радиолокационной технике
Введение | Сокращения | Децибел | Долг Цикл | Доплеровский сдвиг | Радарный горизонт / линия зрения | Время распространения / разрешение | Модуляция | Преобразования / Вейвлеты | Антенна Введение / Основы | Поляризация | Диаграммы излучения | Частотно-фазовые эффекты антенн | Антенна ближнего поля | Радиационная опасность | Плотность мощности | Уравнение одностороннего радара / распространение радиочастот | Уравнение двустороннего радара (моностатическое) | Альтернативное уравнение двустороннего радара | Двустороннее радарное уравнение (бистатическое) | Отношение глушения к сигналу (Дж / С) – постоянная мощность [насыщенная] глушение | Поддержка Jamming | Радиолокационное сечение (RCS) | Контроль выбросов (EMCON) | RF атмосферный Абсорбция / Воздуховод | Чувствительность / шум приемника | Типы и характеристики приемников | Общие типы отображения радаров | IFF – Идентификация – друг или враг | Получатель Тесты | Методы сортировки сигналов и пеленгования | Коэффициент стоячей волны по напряжению (КСВН) / коэффициент отражения / возврат Потери / Несоответствие Потери | Коаксиальные соединители СВЧ | Делители мощности / сумматоры и ответвители | Аттенюаторы / Фильтры / Блоки постоянного тока | Окончания / фиктивные нагрузки | Циркуляторы и диплексеры | Смесители и частотные дискриминаторы | Детекторы | СВЧ измерения | СВЧ волноводы и коаксиальный кабель | Электрооптика | Лазерная безопасность | Число Маха и воздушная скорость vs.Число Маха высоты | EMP / Размеры самолета | Шины данных | RS-232 интерфейс | Интерфейс симметричного напряжения RS-422 | Интерфейс RS-485 | Интерфейсная шина IEEE-488 (HP-IB / GP-IB) | MIL-STD-1553 и 1773 Шина данных |
Эту HTML-версию можно распечатать, но нельзя воспроизводить на веб-сайтах.
Верхние ограничения рабочего цикла
Импульсные регуляторы используют рабочий цикл для реализации управления с обратной связью по напряжению или току. Рабочий цикл представляет собой отношение времени включения (T ON ) к длине полного цикла, времени выключения (T OFF ) плюс время включения и определяет простую взаимосвязь между входным напряжением и выходное напряжение.Для более точного расчета можно принять во внимание другие факторы, но они не имеют решающего значения в следующих пояснениях. Рабочий цикл импульсного регулятора зависит от соответствующей топологии импульсного регулятора. Понижающий (понижающий) преобразователь, как показано на рисунке 1, имеет рабочий цикл D в соответствии с D = выходное напряжение / входное напряжение. Для повышающего преобразователя рабочий цикл D = 1 – (входное напряжение / выходное напряжение).
Рис. 1. Типичный понижающий импульсный стабилизатор с ADP2441.
Эти отношения применимы к режиму непрерывной проводимости (CCM). Здесь ток индуктора не падает до 0 за период времени T. Этот режим часто встречается в схемах, работающих при номинальной нагрузке. При более низких нагрузках или при преднамеренной прерывистой работе ток в катушке разряжается во время выключения. Этот режим называется режимом прерывистой проводимости (DCM). Каждый из этих двух режимов работы имеет свои собственные отношения для соответствующего рабочего цикла для определенного входного и выходного напряжения.
На рисунке 2 показан пример поведения переключения во временной области. Здесь мы рассматриваем понижающий импульсный регулятор в непрерывном режиме работы; то есть в режиме непрерывной проводимости. Рабочий цикл не зависит от частоты переключения. Период T обычно составляет от 20 мкс (50 кГц) до 330 нс (3 МГц). Если значения входного и выходного напряжения совпадают, необходим рабочий цикл, равный 1. Это означает, что есть только время включения, а не время выключения. Однако это возможно не с каждым регулятором переключения.На рисунке 1 для этого должен быть постоянно включен полевой МОП-транзистор верхнего уровня. Если этот переключатель спроектирован как N-канальный MOSFET, для работы ему требуется более высокое напряжение на затворе, чем входное напряжение схемы. Если после каждого времени включения есть определенное время отключения, как в случае рабочего цикла <1, в соответствии с принципом накачки заряда может быть довольно легко сгенерировано более высокое напряжение, чем напряжение питания. Однако это невозможно при рабочем цикле 100%. Таким образом, для импульсных регуляторов со 100% -ным рабочим циклом должны быть реализованы либо тщательно продуманные насосы заряда, действующие независимо от полевых МОП-транзисторов импульсного регулятора, либо переключатель верхнего плеча, показанный на рисунке 1, должен быть спроектирован как полевой МОП-транзистор с P-каналом.И то, и другое также требует дополнительных усилий и затрат.
Рис. 2. Представление во временной области переключения в понижающем импульсном стабилизаторе с током катушки в CCM.
На рис. 3 показан импульсный стабилизатор ADP2370, который обеспечивает 100% рабочий цикл за счет использования полевого МОП-транзистора с P-каналом в качестве переключателя верхнего плеча. Для этого типа понижающего преобразователя входное напряжение может упасть почти до выходного напряжения. Благодаря встроенному в импульсный стабилизатор Р-канальному переключателю можно избежать дополнительных затрат.
Рисунок 3. Пример импульсного регулятора, допускающего рабочий цикл 100%.
Если приложение требует, чтобы входное напряжение могло упасть до уровня, очень близкого к уставке выходного напряжения, следует выбрать импульсный стабилизатор, который допускает рабочий цикл 1 или 100%.
Помимо этого ограничения на рабочий цикл, определяемого переключателем высокого уровня в топологии импульсного регулятора, на рабочий цикл накладываются другие ограничения. Мы рассмотрим их в следующих советах по управлению питанием.
40 CFR § 1065.610 – Генерация рабочего цикла. | CFR | Закон США
В этом разделе описывается, как сгенерировать рабочие циклы, специфичные для вашего двигателя, на основе нормализованных рабочих циклов в части, устанавливающей стандарты. Во время испытания на выбросы используйте рабочий цикл, соответствующий вашему двигателю, чтобы управлять частотой вращения, крутящим моментом и мощностью двигателя, если применимо, с использованием динамометрического стенда двигателя и запроса оператора двигателя. В пункте (а) этого раздела описывается, как «нормализовать» карту вашего двигателя, чтобы определить максимальную испытательную скорость и крутящий момент для вашего двигателя.В оставшейся части этого раздела описывается, как использовать эти значения для «денормализации» рабочих циклов в стандартных частях, которые публикуются на нормализованной основе. Таким образом, термин «нормализованный» в параграфе (а) этого раздела относится к другим значениям, чем в остальной части раздела.
(a) Максимальная скорость тестирования, fntest. Этот раздел обычно применяется к рабочим циклам для двигателей с регулируемой частотой вращения. Для двигателей с постоянной частотой вращения, для которых используются рабочие циклы, которые определяют команды нормализованной скорости, используйте регулируемую скорость холостого хода в качестве измеренного fntest.Это самая высокая частота вращения двигателя, при которой двигатель выдает нулевой крутящий момент. Для двигателей с регулируемой частотой вращения определите fntest следующим образом:
(1) Разработайте измеренное значение для fntest следующим образом:
(i) Определите максимальную мощность Pmax из карты двигателя, созданной в соответствии с § 1065.510, и вычислите значение мощности, равное 98% от Pmax.
(ii) Определите наименьшую и наибольшую частоту вращения двигателя, соответствующую 98% от Pmax, используя линейную интерполяцию и, при необходимости, без экстраполяции.
(iii) Определите частоту вращения двигателя, соответствующую максимальной мощности, fnPmax, путем вычисления среднего из двух значений скорости из параграфа (a) (1) (ii) этого раздела. Если есть только одна скорость, на которой мощность равна 98% от Pmax, возьмите fnPmax как скорость, при которой происходит Pmax.
(iv) Преобразуйте карту в нормализованную карту зависимости мощности от скорости, разделив параметры мощности на Pmax и разделив параметры скорости на fnPmax. Используйте следующее уравнение для вычисления количества, представляющего сумму квадратов нормализованной карты:
(v) Определите максимальное значение суммы квадратов на карте и умножьте это значение на 0.98.
(vi) Определите самую низкую и самую высокую частоту вращения двигателя. соответствующему значению, вычисленному в параграфе (a) (1) (v) данного раздела, с использованием линейная интерполяция. Рассчитайте fntest как среднее из этих двух значений скорости. (viii) В следующем примере показано вычисление fntest: (fn1 = 2360, P1 = 223,1, fnnorm1 = 1,002, Pnorm1 = 0,967) (fn2 = 2364, P2 = 227,7, fnnorm2 = 1,004, Pnorm2 = 0,986) (fn3 = 2369, P3 = 230,0, fnnorm3 = 1,006, Pnorm3 = 0,994) (fn4 = 2374, P4 = 220,8, fnnorm4 = 1.008, Pnorm4 = 0,951) fntest = ((2360+ (2364−2360) · 0,98 · 230,0−223,1227,7−223,1) + (2369+ (2374−2369) · 0,98 · 230,0−230,0220,8−230,0)) 2 = 2363 + 23712 = 2367 об / мин Сумма квадратов = (1,0022 + 0,9672) = 1,94 Сумма квадратов = (1,0042 + 0,9862) = 1,98 Сумма квадратов = (1,0062 + 0,9942) = 2,00 Сумма квадратов = (1,0082 + 0,9512) = 1.92fnpmax = ((2360+ (2364−2360) · 0.98 · 2.0−1.941.98−1.94) + (2369+ (2374−2369) · 0.98 · 2.0−2.01.92−2.0)) 2 = 2363 + 23712 = 2367об / мин
(vi) Определите наименьшую и наибольшую частоту вращения двигателя, соответствующую значению, вычисленному в параграфе (a) (1) (v) этого раздела, используя при необходимости линейную интерполяцию.Рассчитайте fntest как среднее из этих двух значений скорости. Если есть только одна скорость, соответствующая значению, вычисленному в параграфе (a) (1) (v) этого раздела, возьмите fntest как скорость, при которой происходит максимум суммы квадратов.
(vii) Следующий пример иллюстрирует вычисление fntest:
Pмакс = 230,0
fntest = ((2360+ (2364-2360) · 0,98 · 2,0-1,941,98-1,94) + (2369+ (2374-2369) · 0,98 · 2,0-2,01,92-2,0)) 2 = 2362,0 + 2371,52 = 2366,8 r / minfnpmax = ((2360+ (2364−2360) · 0.98 · 230,0−222,5226,8−222,5) + (2369+ (2374−2369) · 0,98 · 230,0−228,6218,7−228,6)) 2 = 2362,7 + 2370,62 = 2366,7 об / мин
(2) Для двигателей с высокоскоростным регулятором, которые будут подвергаться эталонному рабочему циклу, который определяет нормированные скорости более 100%, рассчитайте альтернативную максимальную испытательную скорость, fntest, alt, как указано в этом параграфе (a) ( 2). Если fntest, alt меньше измеренной максимальной скорости тестирования, fntest, определенной в параграфе (a) (1) этого раздела, замените fntest на fntest, alt.В этом случае fntest, alt становится «максимальной испытательной скоростью» для этого двигателя для всех рабочих циклов. Обратите внимание, что § 1065.510 позволяет вам применять необязательную заявленную максимальную тестовую скорость к окончательной измеренной максимальной тестовой скорости, определенной в результате сравнения между fntest и fntest, alt в этом параграфе (a) (2). Определите fntest, alt следующим образом:
fntest, alt = fnhi, idle-fnidle% speedmax + fnidleEq. 1065.610-2
Пример:
fnhi, холостой ход = 2200 об / мин
fnidle = 800 об / мин
ϝntest, alt = 2200-8001.05 + 800
fntest, alt = 2133 об / мин
(3) Для двигателей с регулируемой частотой вращения преобразуйте нормированные скорости в исходные скорости в соответствии с параграфом (c) этого раздела, используя измеренную максимальную испытательную скорость, определенную в соответствии с параграфами (a) (1) и (2) этого раздела – или используйте заявленную вами максимальную тестовую скорость, как это разрешено в § 1065.510.
(4) Для двигателей с постоянной частотой вращения преобразуйте нормализованные скорости в исходные скорости в соответствии с параграфом (c) этого раздела, используя измеренную регулируемую скорость без нагрузки – или используйте заявленную вами максимальную испытательную скорость, как разрешено в § 1065.510.
(b) Максимальный крутящий момент при испытании, Ttest. Для двигателей с постоянной частотой вращения определите измеренное значение Ttest из карт крутящего момента и мощности в зависимости от скорости, созданных в соответствии с § 1065.510, следующим образом:
(1) Для двигателей с постоянной частотой вращения, отображаемых с использованием методов в § 1065.510 (d) (5) (i) или (ii), определите Ttest следующим образом:
(i) Определите максимальную мощность Pmax из карты двигателя, созданной в соответствии с § 1065.510, и вычислите значение мощности, равное 98% от Pmax.
(ii) Определите наименьшую и наибольшую частоту вращения двигателя, соответствующую 98% от Pmax, используя линейную интерполяцию и, при необходимости, без экстраполяции.
(iii) Определите частоту вращения двигателя, соответствующую максимальной мощности, fnPmax, путем вычисления среднего из двух значений скорости из параграфа (a) (1) (ii) этого раздела. Если есть только одна скорость, на которой мощность равна 98% от Pmax, возьмите fnPmax как скорость, при которой происходит Pmax.
(iv) Преобразуйте карту в нормализованную карту зависимости мощности от скорости, разделив параметры мощности на Pmax и разделив параметры скорости на fnPmax. Используйте уравнение. 1065.610-1 для вычисления количества, представляющего сумму квадратов нормализованной карты.
(v) Определите максимальное значение суммы квадратов карты и умножьте это значение на 0,98.
(vi) Определите наименьшую и наибольшую частоту вращения двигателя, соответствующую значению, вычисленному в параграфе (a) (1) (v) этого раздела, используя при необходимости линейную интерполяцию. Рассчитайте fntest как среднее из этих двух значений скорости. Если есть только одна скорость, соответствующая значению, вычисленному в параграфе (a) (1) (v) этого раздела, возьмите fntest как скорость, при которой происходит максимум суммы квадратов.
(vii) Измеренное значение Ttest – это отображаемый крутящий момент при fntest.
(2) Для двигателей с постоянной частотой вращения, использующих метод двухточечного сопоставления в § 1065.510 (d) (5) (iii), вы можете следовать параграфу (a) (1) этого раздела, чтобы определить измеренное значение Ttest, или вы может напрямую использовать измеренный крутящий момент второй точки в качестве измеренного Ttest.
(3) Преобразуйте нормированные крутящие моменты в исходные крутящие моменты в соответствии с параграфом (d) этого раздела, используя измеренный максимальный испытательный крутящий момент, определенный в соответствии с параграфом (b) (1) этого раздела, или используйте заявленный вами максимальный испытательный крутящий момент, как разрешено в § 1065.510.
(c) Создание значений опорной скорости из нормализованных скоростей рабочего цикла. Преобразуйте нормированные значения скорости в справочные значения следующим образом:
(1)% скорости. Если в нормированном рабочем цикле указаны значения скорости в%, используйте скорость холостого хода и максимальную испытательную скорость для преобразования рабочего цикла следующим образом:
fnref =% скорости × (fntest-fnidle) + fnidleEq. 1065.610-3
Пример:
% скорости = 85% = 0,85
fntest = 2364 об / мин
fnidle = 650 об / мин
fnref = 0.85 • (2364-650) + 650
fnref = 2107 об / мин
(2) скорости A, B и C. Если нормализованный рабочий цикл определяет скорости как значения A, B или C, используйте кривую зависимости мощности от скорости, чтобы определить наименьшую скорость ниже максимальной мощности, при которой возникает 50% максимальной мощности. Обозначьте это значение как nlo. Примите nlo как скорость холостого хода на прогретом двигателе, если все точки мощности на скоростях ниже максимальной скорости превышают 50% максимальной мощности. Также определите максимальную скорость выше максимальной мощности, при которой достигается 70% максимальной мощности.Обозначим это значение как nhi. Если все точки мощности на скоростях, превышающих максимальную, превышают 70% максимальной мощности, за nhi принимается заявленная максимальная безопасная частота вращения двигателя или заявленная максимальная репрезентативная частота вращения двигателя, в зависимости от того, какое из значений ниже. Используйте nhi и nlo для вычисления опорных значений для скоростей A, B или C следующим образом:
fnrefA = 0,25 × (nhi − nlo) + nloEq. 1065.610-4
fnrefB = 0,50 × (nhi − nlo) + nloEq. 1065.610-5
fnrefC = 0,75 × (nhi − nlo) + nloEq. 1065.610-6
Пример:
nlo = 1005 об / мин
nhi = 2385 об / мин
fnrefA = 0.25 • (2385−1005) + 1005
fnrefB = 0,50 • (2385−1005) + 1005
fnrefC = 0,75 • (2385−1005) + 1005
fnrefA = 1350 об / мин
fnrefB = 1695 об / мин
fnrefC = 2040 об / мин
(3) Средняя скорость. На основе карты определите максимальный крутящий момент, Tmax, и соответствующую скорость, fnTmax, рассчитанную как среднее значение самой низкой и максимальной скоростей, при которых крутящий момент равен 98% от Tmax. Используйте линейную интерполяцию между точками, чтобы определить скорости, при которых крутящий момент равен 98% от Tmax.Определите вашу эталонную промежуточную скорость как одно из следующих значений:
(i) fnTmax, если оно составляет от (60 до 75)% от максимальной тестовой скорости.
(ii) 60% максимальной тестовой скорости, если fnTmax меньше 60% максимальной тестовой скорости.
(iii) 75% максимальной тестовой скорости, если fnTmax больше 75% максимальной тестовой скорости.
(d) Создание опорных моментов из нормированных моментов рабочего цикла. Преобразуйте нормализованные крутящие моменты в эталонные крутящие моменты, используя карту зависимости максимального крутящего момента от скорости.
(1) Контрольный крутящий момент для двигателей с регулируемой частотой вращения. Для данной точки скорости умножьте соответствующий% крутящего момента на максимальный крутящий момент на этой скорости в соответствии с вашей картой. Если ваш двигатель подчиняется эталонному рабочему циклу, который указывает отрицательные значения крутящего момента (т. Е. Двигатель работает), используйте отрицательный крутящий момент для этих точек движения (т. Е. Крутящий момент мотора). Если вы отображаете отрицательный крутящий момент, как разрешено в соответствии с § 1065.510 (c) (2), и срабатывает регулятор низкой скорости, что приводит к положительным крутящим моментам, вы можете заменить эти положительные отображенные моторные крутящие моменты отрицательными значениями между нулем и наибольшим отрицательным моторным крутящим моментом.Как для карт максимального, так и для моторного крутящего момента, линейно интерполируйте отображенные значения крутящего момента, чтобы определить крутящий момент между отображенными скоростями. Если эталонная скорость ниже минимальной заданной скорости (т.е. 95% скорости холостого хода или 95% минимальной требуемой скорости, в зависимости от того, что больше), используйте преобразованный крутящий момент при минимальной заданной скорости в качестве эталонного крутящего момента. Результатом является эталонный крутящий момент для каждой точки скорости.
(2) Контрольный крутящий момент для двигателей с постоянной частотой вращения. Умножьте значение крутящего момента в% на максимальный испытательный крутящий момент.Результатом является эталонный крутящий момент для каждой точки.
(3) Обязательные отклонения. Мы требуем следующих отклонений для двигателей с регулируемой частотой вращения, предназначенных в первую очередь для приведения в движение транспортного средства с автоматической коробкой передач, где этот двигатель подвергается переходному рабочему циклу с работой на холостом ходу. Эти отклонения предназначены для получения более представительного переходного рабочего цикла для этих приложений. Для установившихся рабочих циклов или переходных рабочих циклов без работы на холостом ходу требования этого параграфа (d) (3) не применяются.Точки холостого хода для установившихся рабочих циклов таких двигателей должны работать в условиях, имитирующих нейтраль или парковку трансмиссии. Вы можете разработать различные процедуры для корректировки CITT в зависимости от скорости в соответствии с хорошей инженерной оценкой.
(i) Скорость с нулевым процентом – это скорость холостого хода в прогретом состоянии, измеренная в соответствии с § 1065.510 (b) (6) с применением CITT, т. Е. Измеренная скорость холостого хода в прогретом состоянии в приводе.
(ii) Если цикл начинается с набора смежных точек холостого хода (скорость с нулевым процентом и крутящий момент с нулевым процентом), оставьте контрольные моменты равными нулю для этого начального непрерывного сегмента холостого хода.Это означает работу на холостом ходу с трансмиссией в нейтральном или стояночном положении в начале переходного рабочего цикла после запуска двигателя. Если начальный сегмент холостого хода длится более 24 секунд, измените контрольные крутящие моменты для оставшихся точек холостого хода в начальном непрерывном сегменте холостого хода на CITT (т. Е. Измените точки холостого хода, соответствующие 25 секундам до конца начального сегмента холостого хода, на CITT). Это означает переключение трансмиссии на движение.
(iii) Для всех остальных точек холостого хода измените контрольный крутящий момент на CITT.Это означает, что трансмиссия работает в режиме привода.
(iv) Если двигатель предназначен в первую очередь для автоматических коробок передач с функцией «Нейтраль-когда-неподвижен», которая автоматически переключает трансмиссию в нейтральное положение после остановки транспортного средства на определенное время и автоматически переключается на движение, когда оператор увеличивает нагрузку (т. Е. , нажимает педаль акселератора), измените опорный крутящий момент обратно на ноль для точек холостого хода в приводе после назначенного времени.
(v) Для всех точек с нормализованной скоростью, равной или ниже нуля процентов и опорным крутящим моментом от нуля до CITT, установите опорный крутящий момент на CITT.Это необходимо для обеспечения более плавного задания крутящего момента ниже холостого хода.
(vi) В отношении точек движения не вносить изменений.
(vii) Для последовательных точек с контрольными моментами от нуля до CITT, которые сразу следуют за точками холостого хода, измените их контрольные моменты на CITT. Это необходимо для обеспечения плавного перехода крутящего момента из режима холостого хода. Это не применяется, если используется функция «Нейтральное положение в неподвижном состоянии» и трансмиссия переключена в нейтральное положение.
(viii) Для последовательных точек с контрольным крутящим моментом от нуля до CITT, которые непосредственно предшествуют точкам холостого хода, измените их контрольные моменты на CITT.Это необходимо для обеспечения плавного перехода крутящего момента в режим холостого хода.
(4) Допустимые отклонения для любого двигателя. Если ваш двигатель не работает ниже определенного минимального крутящего момента в нормальных условиях эксплуатации, вы можете использовать заявленный минимальный крутящий момент в качестве эталонного значения вместо любого значения, денормализованного до меньшего, чем заявленное значение. Например, если ваш двигатель подключен к гидростатической трансмиссии и имеет минимальный крутящий момент, даже когда все приводные гидравлические приводы и двигатели неподвижны, а двигатель работает на холостом ходу, вы можете вместо этого использовать этот заявленный минимальный крутящий момент в качестве эталонного значения крутящего момента. любого контрольного значения крутящего момента, созданного в соответствии с параграфом (d) (1) или (2) этого раздела, которое находится между нулем и этим заявленным минимальным крутящим моментом.
(e) Получение эталонных значений мощности из нормированных значений мощности рабочего цикла. Преобразуйте нормализованные значения мощности в значения эталонной скорости и мощности, используя карту зависимости максимальной мощности от скорости.
(1) Сначала преобразуйте нормированные значения скорости в значения эталонной скорости. Для заданной точки скорости умножьте соответствующий% мощности на отображаемую мощность при максимальной испытательной скорости, fntest, если иное не указано в части, устанавливающей стандарты. Результатом является эталонная мощность для каждой точки скорости, Pref.Преобразуйте эти опорные мощности в соответствующие крутящие моменты для запроса оператора и управления динамометром, а также для проверки рабочего цикла согласно 1065.514. Используйте опорную скорость, связанную с каждой опорной точкой мощности для этого преобразования. Как и в случае с циклами, указанными с% крутящего момента, выполните линейную интерполяцию между этими эталонными значениями крутящего момента, полученными в циклах с% мощности.
(2) Допустимые отклонения для любого двигателя. Если ваш двигатель не работает ниже определенной мощности при нормальных условиях эксплуатации, вы можете использовать заявленную минимальную мощность в качестве эталонного значения вместо любого значения, денормализованного до меньшего, чем заявленное.Например, если ваш двигатель напрямую подключен к гребному винту, он может иметь минимальную мощность, называемую мощностью холостого хода. В этом случае вы можете использовать эту заявленную минимальную мощность в качестве эталонного значения мощности вместо любого эталонного значения мощности, созданного в соответствии с параграфом (e) (1) этого раздела, которое составляет от нуля до этой заявленной минимальной мощности.
[73 FR 37324, 30 июня 2008 г., с поправками, внесенными в 73 FR 59330, 8 октября 2008 г .; 75 FR 23045, 30 апреля 2010 г .; 76 FR 57453, 15 сентября 2011 г .; 78 FR 36398, 17 июня 2013 г .; 79 FR 23783, апр.28, 2014; 80 FR 9118, 19 февраля 2015 г .; 81 FR 74170, 25 октября 2016 г .; 86 FR 34555, 29 июня 2021 г.] Рабочий цикл| Сеть вещей
Рабочий цикл указывает долю времени, в течение которого ресурс занят.
Когда одно устройство передает по каналу в течение 2 единиц времени каждые 10 единиц времени , это устройство имеет рабочий цикл 20%.
Однако, если мы также рассмотрим канала , все станет немного сложнее. Когда у нас есть устройство, которое передает по 3 каналам вместо одного, каждый отдельный канал все еще занят в течение 2 единиц времени каждые 10 единиц времени (то есть 20%).Однако устройство теперь передает в течение 6 единиц времени каждые 10 единиц времени , что дает ему рабочий цикл 60%.
В нашем европейском частотном плане у нас есть каналы в разных поддиапазонах , поэтому при рассмотрении рабочего цикла мы также должны учитывать это. Допустим, 3 канала, которые мы использовали раньше, находятся в 2 разных поддиапазонах . Каждый отдельный канал по-прежнему имеет рабочий цикл 20%, устройство по-прежнему имеет рабочий цикл 60%, но теперь мы видим, что Band 1 используется в течение 2 единиц времени каждые 10 единиц времени (20%), а Band 2 используется в течение 4 единиц времени каждые 10 единиц времени (40%).
Максимальный рабочий цикл
Рабочий цикл радиоустройств часто регулируется государством. В этом случае рабочий цикл обычно устанавливается на 1%, но обязательно ознакомьтесь с правилами вашего местного правительства, чтобы быть уверенным.
В Европе рабочие циклы регулируются разделом 7.2.3 стандарта ETSI EN300.220. Этот стандарт определяет следующие поддиапазоны и их рабочие циклы:
- г (863,0 – 868,0 МГц): 1%
- г1 (868.0-868,6 МГц): 1%
- g2 (868,7 – 869,2 МГц): 0,1%
- g3 (869,4 – 869,65 МГц): 10%
- g4 (869,7 – 870,0 МГц): 1%
Кроме того, спецификация LoRaWAN диктует рабочие циклы для объединяемых частот , частот, которые устройства всех LoRaWAN-совместимых сетей используют для беспроводной активации (OTAA) устройств. В большинстве регионов этот рабочий цикл установлен на 1% .
Политика добросовестного использования
В публичной сети сообщества The Things Network применяется политика добросовестного использования , которая ограничивает эфирное время восходящего канала с до 30 секунд в день (24 часа) на узел и сообщений нисходящего канала с до 10 сообщений в день (24 часа). ) на узел .Если вы используете частную сеть, эти ограничения не применяются, но вы все равно должны соответствовать государственным ограничениям и ограничениям LoRaWAN.
Соответствие
Каждое радиоустройство должно соответствовать установленным ограничениям рабочего цикла. Это относится как к узлам , так и к шлюзам .
На практике это означает, что вы должны программировать свои узлы таким образом, чтобы они оставались в установленных пределах. Самый простой способ сделать это – подсчитать, сколько эфирного времени занимает каждое сообщение, с помощью одного из многих калькуляторов эфирного времени и использовать эту информацию для выбора подходящего интервала передачи.
Некоторые радиомодули (например, RN2483) также устанавливают ограничения рабочего цикла. Если вы превысите лимит, модуль выдаст сообщение no_free_ch . В частности, RN2483 ограничивает рабочий цикл для каждого канала. Это означает, что если у вас настроен только 1 канал, модуль начнет принудительное выполнение рабочего цикла после первого сообщения.
На приведенном ниже рисунке показано принудительное применение к ресурсу с пределом рабочего цикла 20%
В европейском диапазоне передача по каналу в пределах диапазона частот также влияет на другие частоты в этом диапазоне.
На рисунке ниже показано принудительное применение на двух диапазонах, каждый с предельным рабочим циклом 20%
Поскольку ограничение рабочего цикла для каждого канала проще реализовать, вы также можете разделить рабочий цикл поддиапазона по количеству каналов в этом поддиапазоне. Так, например, в поддиапазоне с 8 каналами и рабочим циклом 1% каждый канал имеет рабочий цикл 1/8% (это 0,125%).
Этот метод также реализуется модулем RN2483, и в результате вместо того, чтобы видеть no_free_ch , когда вы отправляете слишком быстро после первого сообщения, вы можете отправить несколько сообщений до того, как все 8 каналов будут «заблокированы» и рабочий цикл принудительно.
На рисунке ниже показано принудительное применение на тех же двух диапазонах, но принудительное для каждого канала
(примечание: канал 3 заблокирован до слота 11)
Что такое рабочий цикл? | Fluke
Рабочий цикл – это отношение времени, в течение которого нагрузка или цепь находится во включенном состоянии, по сравнению с временем, в течение которого нагрузка или цепь выключены.
Рабочий цикл, иногда называемый «коэффициентом заполнения», выражается в процентах от времени включения. Рабочий цикл 60% – это сигнал, который включен 60% времени и выключен в остальных 40%.
Многие нагрузки быстро включаются и выключаются быстродействующим электронным переключателем, который точно регулирует выходную мощность нагрузки. Работа под нагрузкой – например, яркость лампы, мощность нагревательного элемента и магнитная сила катушки – может регулироваться рабочим циклом с помощью периодов времени включения и выключения или циклов в секунду.
Упрощенный рабочий цикл
Если на клапан подается импульсное включение с переменной длительностью (так называемая широтно-импульсная модуляция), рабочий цикл изменяется. Если он мигает на 0.05 секунд в 0,1-секундном цикле, рабочий цикл топливной форсунки равен 50%. Если он включился в течение 0,09 секунды того же 0,1-секундного цикла, рабочий цикл топливной форсунки равен 90%.
Пример рабочего цикла
В автомобильной электронной системе впрыска топлива импульсы напряжения, подаваемые на соленоид клапана топливной форсунки, управляют клапаном топливной форсунки с фиксированной частотой 10 циклов в секунду или 10 Гц.
Широтно-импульсная модуляция позволяет точно контролировать подачу топлива в двигатель электроникой.Среднее значение напряжения для каждого рабочего цикла определяется длительностью включения импульса.
Соленоиды с рабочим циклом используют сигнал переменного рабочего цикла для изменения расхода или регулировки давления. Чем дольше соленоид остается открытым, тем больше создается поток и меньше давление. Эти соленоиды управляются либо подачей, либо с земли.
Что такое ширина импульса?
Ширина импульса – это фактическое время включения, измеряемое в миллисекундах. Время выключения не влияет на ширину импульса сигнала.Единственное измеряемое значение – это то, как долго сигнал находится в состоянии ВКЛ (с наземным управлением).
Ссылка: Принципы цифрового мультиметра Глена А. Мазура, American Technical Publishers.
Как рассчитать рабочий цикл повышающего преобразователя
Форма волны индуктивности является ключом к расчету рабочего цикла повышающего преобразователя. Вы можете получить прямое уравнение для формулы рабочего цикла повышающего преобразователя на разных сайтах, но здесь я расскажу, как оно выводится.Между тем, знакомая схема повышающего преобразователя показана на рисунке 1.
Катушка индуктивности повышающего преобразователя заряжается во время Ton и разряжается во время Toff. Форма волны тока катушки индуктивности будет выглядеть, как показано на рисунке 2 ниже.
Рисунок 2 Рисунок 2 – форма волны индуктора повышающего преобразователя с непрерывной проводимостью. Кстати, повышающий преобразователь может работать в трех режимах; непрерывная проводимость (CCM), прерывистая проводимость (DCM) и граничный режим. Для CCM ток индуктора не будет достигать нуля после каждого цикла переключения.Для DCM ток катушки индуктивности достигает нуля до наступления следующего Ton. С другой стороны, для граничного режима ток катушки индуктивности составляет всего
ноль, когда происходит следующее Ton.
Рабочий цикл CCM и граничного режима одинаков. Однако вы не можете использовать этот рабочий цикл для повышающего преобразователя DCM. Но на практике работы DCM избегают, потому что в этой области высокий пиковый ток и высокие среднеквадратичные потери. Это может потребовать устройств с высоким рейтингом. Помимо этого, DCM может вызвать проблемы в EMC.Опыт показывает, что повышающий преобразователь обычно настраивается на CCM при более высоких нагрузках и при полной нагрузке. С другой стороны, когда нагрузка уменьшается, операция может перейти в режим DCM, но на этот раз ток уже очень мал, и опасность перегрузки устройства больше не является проблемой.
Как рассчитать рабочий цикл повышающего преобразователя – Анализ в течение тонны
Во время Ton переключатель S включен. Диод будет смещен в обратном направлении, и в этот раз на нагрузку будет подаваться энергия, накопленная в конденсаторе C.Индуктор зарядится. Ток идет от Vin к катушке индуктивности L, а затем к переключателю S. По КВЛ,
Затем выразив VL
- Ур. 1
(Примечание: VL – напряжение катушки индуктивности, а VSw – напряжение включения переключателя.)
Напряжение на катушке индуктивности также определяется приведенной ниже формулой.
- Ур. 2
Выражение изменения тока di
- Ур.3
Заменить уравнение 1 на уравнение. 3
- Ур. 4
Тогда мы избавимся от переменной dt, интегрировав уравнение от 0 до Ton.
- Ур. 5
Как рассчитать рабочий цикл повышающего преобразователя – Анализ во время Toff
Во время Toff катушка индуктивности меняет полярность, и в это время диод будет смещен в прямом направлении, а нагрузка будет обеспечиваться энергией в катушке индуктивности.Энергия на катушке индуктивности начнет убывать. Ток протекает от Vin к диоду D, а затем к нагрузке. Применение КВЛ,
Выражение В.Л.,
- Ур. 6
(Примечание: VL – это напряжение на катушке индуктивности, и это не падение в течение этого времени, поскольку полярность меняет полярность. VF – прямое напряжение диода.)
Подставляя [Ур. 6 ] в [Ур. 3 ] приведет к
- Ур.7
Затем мы исключим переменную dt путем интегрирования от Ton до T.
- Ур. 8
Теперь вернемся к рисунку 2, величина тока катушки индуктивности во время Ton и Toff равна. Следовательно, мы можем приравнять [Ур. 5 ] и [Ур. 8 ].
Затем подставьте Ton = DT
(Примечание: D – рабочий цикл повышающего преобразователя, который равен отношению времени включения ко всему периоду сигнала.)
Затем решение для рабочего цикла, D
- Ур. 9
Принятие идеальных значений (падение напряжения на диоде и переключателе равно нулю)
- Ур. 10
Вышеуказанный рабочий цикл может использоваться также с граничным режимом. Однако это больше не может применяться к DCM. Вывод рабочего цикла DCM отличается, поскольку он уже имеет мертвое время, а предел интегрирования во время Toff больше не от Ton до T. В любом случае, как упоминалось выше, на практике повышающий преобразователь работает с CCM при более высоких нагрузках.
Если вас спросят, как рассчитать рабочий цикл повышающего преобразователя, вы уже можете дать ответ!
Возможно, вас заинтересуют шаблон выбора компонента повышающего преобразователя
и шаблон расчета напряжения компонента повышающего преобразователя.
Как получить среднеквадратичное значение импульсных и прямоугольных сигналов – Освоение дизайна электроники
Среднеквадратичное значение импульсного сигнала можно легко вычислить, начиная с определения среднеквадратичного значения.Форма импульса показана на рисунке 1. Отношение t1 / T – это рабочий цикл импульсного сигнала. Как показано в других статьях на этом веб-сайте (MasteringElectronicsDesign.com: Как получить среднеквадратичное значение трапецеидальной формы волны и MasteringElectronicsDesign.com: Как получить среднеквадратичное значение треугольной формы волны), определение среднеквадратичного значения является интегралом по периоду сигнала. как в уравнении (1).
Рисунок 1
| (1) |
Импульсная функция с переменной «время» является константой, которая представляет собой амплитуду сигнала между 0 и t1 и нулем от t1 до T, как в (2).
| (2) |
где с u1 (t) я отметил функцию формы сигнала на рисунке 1. После замены u1 (t) в уравнении (1) мы можем найти квадрат среднеквадратичного значения, как в следующем выражении.
| (3) |
Следовательно, среднеквадратичное значение импульсного сигнала равно
| (4) |
Это выражение также можно найти в (5)
| (5) |
где с D я отметил рабочий цикл импульсного сигнала, D = t1 / T.
Что делать, если импульсный сигнал биполярный, как на рисунке 2?
Рисунок 2
В этом случае следует ожидать, что отрицательная часть сигнала также будет вносить вклад в энергию, подаваемую на нагрузку. Чтобы вычислить его среднеквадратичное значение, давайте разделим сигнал на две части: от 0 до t1 и от t1 до T, как в (6).
| (6) |
где с u11 (t) и u12 (t) я отметил два участка формы волны на рисунке 2.
Среднеквадратичное значение u11 (t) идентично значению, показанному в уравнении (3).
| (7) |
Аналогичным образом мы можем вычислить среднеквадратичное значение u12 (t):
| (8) |
Затем вычисляется общее среднеквадратичное значение формы биполярного импульса путем применения квадратного корня из суммы квадратов u11 RMS и u12 RMS .
| (9) |
После расчетов среднеквадратичное значение сигнала биполярного импульса составляет
| (10) |
Как видите, среднеквадратичное значение биполярного импульса не зависит от его скважности и равно его амплитуде.
Зная среднеквадратичное значение импульсного сигнала, мы можем легко вычислить среднеквадратичное значение периодического прямоугольного сигнала.Прямоугольная волна на рисунке 3 представляет собой импульсный сигнал с коэффициентом заполнения 50%. Его среднеквадратичное значение можно рассчитать из уравнения (5), где D = 1/2. Его среднеквадратичное значение приведено в (11).
Рисунок 3
| (11) |
>>> <<<
.