
Генератор для шагового двигателя | AlexGyver Community
dron1000
✩✩✩✩✩✩✩
- #1
Появилась надобность в таком устройстве которое крутит шаговик с заданной скоростью.
На али есть такие генераторы.
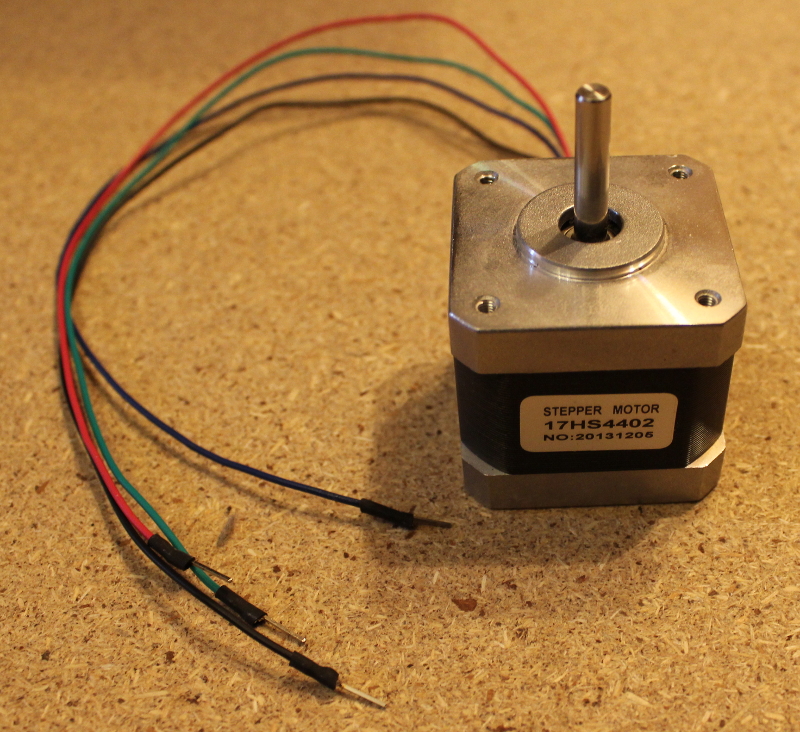
Но они какие то большие, хочу сделать сам, и компактнее, т.к. шаговик нема17 хочу на на одной плате расположить сам генератор с регулировкой и драйвер.
Пока не знаю точно какие обороты нужны, думаю больше 20 об\сек. не понадобится, т.е. 20 оборотов * 200 шагов, получается частота нужна около 4 кГц.
Я в электронике не сильно разбираюсь, может что-то посоветуйте как по простому это сделать, или может какие-то схемы есть. Может на Attuny 13 такое сделать?
Может на Attuny 13 такое сделать?
Изменено:
Эдуард Анисимов
★★★★★★✩
- #2
Микросхема NE555. На ней собирается очень компактно.
NE555.ZIP
357.8 KB Просмотры: 4
Реакции:
dron1000Эдуард Анисимов
★★★★★★✩
- #4
@dron1000, Моделирует и рассчитывает разные подключения NE555
dron1000
✩✩✩✩✩✩✩
- #5
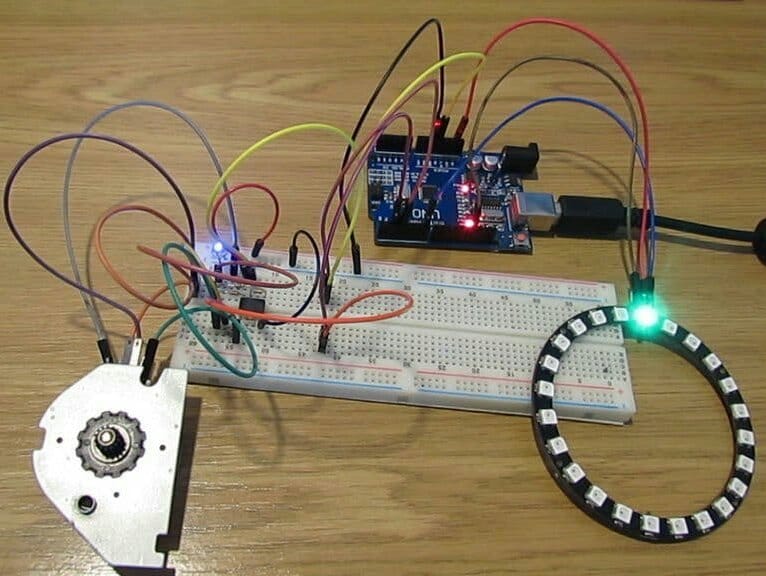
Цель уместить на одной плате, питание шагового двигателя 12v, преобразователь с 12v до 5v для питания драйвера и генератора шагов для него же.
Что скажите?
Изменено:
Эдуард Анисимов
★★★★★★✩
- #6
Драйвер неправильно включён. Ищите лучше. Читайте даташиты. Там много интересного.
dron1000
✩✩✩✩✩✩✩
- #7
Эдуард Анисимов написал(а):
Драйвер неправильно включён.
Ищите лучше. Читайте даташиты. Там много интересного.
Нажмите для раскрытия…
делал по картинке с сайта Гайвера
Эдуард Анисимов
★★★★★★✩
- #8
Вот это более правильно.
Только MS0…MS2 не оставляют в воздухе.
Синхронные электродвигатели постоянного тока. Большая энциклопедия нефти и газа. Синхронные линейные шаговые двигатели
Чтобы тот или иной электрический прибор работал, ему требуется специальный приводной механизм. Одним из таких механизмов является шаговый двигатель. В данном материале вы узнаете, что он собой представляет, какой принцип его работы и на какие категории подразделяется.
Одним из таких механизмов является шаговый двигатель. В данном материале вы узнаете, что он собой представляет, какой принцип его работы и на какие категории подразделяется.
Шаговый двигатель может быть униполярным или биполярным. Он является электрическим и бесщеточным двигателем постоянно тока , способным делить полный оборот на несколько одинаковых шагов. В него входят такие детали:
Идеальные генераторы тока Генератор тока может быть обозначен этим символом, где направление стрелки указывает направление тока: идеальный генератор. Компоненты, в которых развиваются определенные электрические силы, называются электрическими генераторами. Они являются домом для взаимодействия между электрическими явлениями и явлениями другой природы, которые реализуют генерацию электричества путем преобразования из других видов энергии. Они являются активными биполями, имеют терминалы, которые позволяют подключаться к другим электрическим компонентам и делятся на две категории: ток-ток.
Шаговый двигатель используется преимущественно для следующих целей:
- работы фрезерного станка;
- работы шлифовального станка;
- обеспечивает работу разных бытовых приборов;
- работы производственных механических средств;
- обеспечивает работу транспорта.

Идеальные генераторы напряжения Генератор напряжения может быть указан одним из следующих символов. Представление генератора тока. Какие типы генераторов существуют? Большие ветряные электростанции состоят из сотен отдельных ветровых турбин, соединенных с сетью электропередачи. Морской ветер более стабилен, обеспечивает больше энергии и имеет меньший визуальный эффект, однако затраты на строительство и техническое обслуживание значительно выше. Небольшие береговые ветровые электростанции обеспечивают электроэнергию в изолированных местах.
Принцип работы привода
Принцип работы данного привода выглядит следующим образом. При приложении напряжении к клеммам, щетки на самом шаговом двигателе начинают постоянно двигаться. Движок холостого хода имеет при этом уникальное свойство: он преобразовывает входящие импульсы
, имеющие преимущественно прямоугольную направленность, в заранее обозначенное положение приложенного ведущего вала.Электрические компании все чаще покупают избыточную электроэнергию, производимую небольшими отечественными ветряными турбинами. Энергия ветра – это альтернативная энергия ископаемого топлива, богатая, возобновляемая и поддерживаемая зеленой экономикой, широко распространенная, чистая, не производит выбросов парниковых газов во время эксплуатации и требует чрезмерно высокого земельного участка. Окружающая среда, как правило, менее проблематична, чем окружающая среда. Лезвия ветра, эти хорошие гиганты всегда в движении, не могут очаровывать и любопытствовать.
Энергия ветра – это альтернативная энергия ископаемого топлива, богатая, возобновляемая и поддерживаемая зеленой экономикой, широко распространенная, чистая, не производит выбросов парниковых газов во время эксплуатации и требует чрезмерно высокого земельного участка. Окружающая среда, как правило, менее проблематична, чем окружающая среда. Лезвия ветра, эти хорошие гиганты всегда в движении, не могут очаровывать и любопытствовать.
Каждый из входящих импульсом способен переместить вал под определенным углом. Приборы, которые оснащены подобным редуктором, имеют максимальную эффективность при условии наличия нескольких зубчатых электромагнитов, которые находятся вокруг центрального железного куска, имеющего зубчатую форму. Внешняя цепь управления возбуждает электромагнит. При необходимости повернуть вал двигателя, тот электромагнит, к которому приложена энергия, притягивает к себе зубья колеса. Когда они выравниваются по отношению к электромагниту, они смещены по отношению к последующей магнитной части двигателя.
Типы шаговых двигателей
И поэтому, чтобы усомниться, мы объясним, как они работают. Прежде всего, мы начинаем с выделения двух типов ветротурбин: вертикальной оси и горизонтальной оси. Турбины, которые обычно видны на современных ветровых электростанциях, состоят из башни и трех горизонтальных лопастей оси, из которых они называются. Менее частыми являются турбины с вертикальной осью, менее эффективные, чем первая, но они способны направлять ветер во всех направлениях, и даже со слабыми ветрами они могут быстро вращаться.
Синхронные линейные шаговые двигатели
Они состоят из центральной башни, вокруг которой расположены вертикальные лопасти. Электродвигатель переменного тока является электродвигателем, который может работать с использованием переменного тока. Только с обмоткой статора Эти двигатели являются одними из наиболее используемых для этого типа источников питания и делятся на несколько аспектов: Количество фаз Трехфазный двигатель.
Первый электромагнит выключается, а затем включается второй, после чего начинает вращаться шестеренка, выравниваясь при этом с предыдущим колесом.
Трехфазный асинхронный двигатель Магнит статора в асинхронном трехфазном двигателе Трехфазный двигатель представляет собой тип электродвигателя, который требует запуска трехфазной системы токов, поэтапной по времени и в пространстве с углом 120 °. Асинхронный двигатель представляет собой электродвигатель переменного тока, угловая скорость его ротора меньше, чем скорость вращения магнитного поля, генерируемого обмотками статора, из которых асинхронно. Асинхронный двигатель также называется асинхронным двигателем из-за его принципа работы, описанного ниже.
Чтобы контролировать работу шагового двигателя применяется специальный драйвер. Это необходимо в тех случаях, если вы настраиваете привод для работы станка или применяете его для запуска в работу ветрогенератора.
Типы шаговых двигателей
Шаговые двигатели подразделяются на такие типы:
Особенности подключения шагового двигателя
Асинхронный двигатель может использоваться как генератор переменного тока с или без использования конденсаторов в зависимости от того, подключен ли он к сети или нет. Он используется для небольших мощностей в ситуациях, когда простота использования синхронного двигателя предпочтительна даже за счет производительности.
Однофазный двигатель представляет собой тип электродвигателя, который требует использования электрической линии с электрической фазой и нейтральным проводом, причем эти двигатели могут иметь разные применения и конструктивные формы, как правило, с учетом неэлектрической характеристики Двухфазные двигатели используются для привода этих двигателей, где они получают вторую фазу за счет использования конденсатора.
- с наличием постоянного магнита;
- синхронный гибридный привод;
- переменный двигатель.
Все они несколько отличаются друг от друга, в том числе и по принципам своей работы.
Так, например, приводы с постоянными магнитами оснащены специальной магнитной деталью в роторе. Такие двигатели работают по принципу притяжения либо отталкивания статором и ротором мотора на основе электромагнита.
Синхронный двигатель является менее используемым однофазным двигателем, учитывая несколько применений, характеризующихся магнитным полем, индуцированным магнитным полем, синхронизированным с магнитным полем статора, которое затем вращается с той же частотой. Когда ток течет через обмотки, вокруг ротора создается магнитное поле. Левая часть ротора отбрасывается левым магнитом и нарисована правой. Аналогично, внизу справа. Пара генерирует вращение. Когда арматура выравнивается горизонтально, переключатель инвертирует направление тока через обмотки, также изменяя магнитное поле.
Переменный двигатель имеет обычный железный ротор и работа его построена по принципу фундаментальности. Когда допускается минимальный уровень отталкивания с самым малым зазором, при этом точки ротора имеют притяжение к полюсам статора.
А вот гибридный привод может сочетать в себе оба принципа работы, он считается наиболее дорогой моделью шаговых двигателей.
Линейный двигатель – это электродвигатель, в котором ротор и статор вместо кругового «разворачиваются», и вместо создания крутящего момента они создают линейную силу. Существует множество проектных решений для линейных двигателей, которые можно разделить на две категории: низкое ускорение и высокое ускорение.
Ключевые технические характеристики двигателей
Презентация электродвигателя. Электрические транспортные средства могут быть различными и в зависимости от потребностей или конструктивных особенностей на 1, 2, 3, 4 или более колесах. Каковы наиболее распространенные типы транспортных средств? Электрический мотоцикл, ноль мотоциклов Электрический скутер или электрический мотоцикл – это двух – или трехколесный автомобиль, который использует электрический двигатель для передвижения.
Двухфазные шаговые двигатели
Двухфазный мотор очень прост, его можно установить человеку без специального опыта. Независимо от того, собрали ли вы его самостоятельно или приобрели в готовом виде, он имеет два типа обмотки для катушек:
Независимо от того, собрали ли вы его самостоятельно или приобрели в готовом виде, он имеет два типа обмотки для катушек:
В статье рассматривается случайная перегрузка по току и кратковременная перегрузка крутящего момента в многофазных асинхронных двигателях, двигателях постоянного тока и многофазных синхронных двигателях. Текущая перегрузочная способность роторных машин указана для согласования этих машин с устройствами управления и защиты. Тепловой эффект в намоточных машинах изменяется примерно как результат времени и второй мощности тока. Ток, превышающий номинальный ток, увеличит температуру. Если не оговорено иное, можно предположить, что машина будет работать при текущих перегрузках в течение своего срока службы только в течение нескольких коротких периодов времени.
- униполярную;
- биполярную.
Если шаговый двигатель имеет одну обмотку с центральным магнитным краном, влияющим на каждую фазу, то это униполярный привод. Каждую обмоточную секцию следует включить с целью обеспечения нужного направления магнитного поля.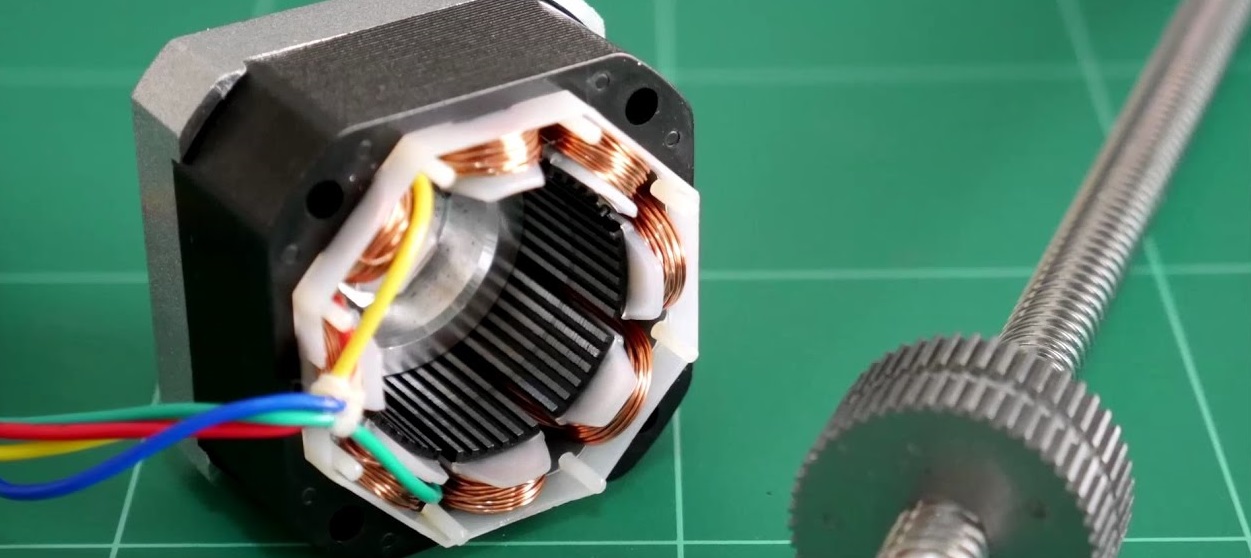 В данном приводе магнитный полюс способен функционировать без необходимости дополнительного переключения, поэтому направления тока и цепная коммутация делаются очень просто , при помощи одного транзистора на каждую обмотку. При этом учитываются переключения фазы:
В данном приводе магнитный полюс способен функционировать без необходимости дополнительного переключения, поэтому направления тока и цепная коммутация делаются очень просто , при помощи одного транзистора на каждую обмотку. При этом учитываются переключения фазы:
Если машина переменного тока должна использоваться как генератор, а как двигатель, то перегрузка должна быть предметом соглашения. Двигатели Многофазные двигатели с номинальной мощностью до 315 кВт и номинальным напряжением до 1 кВ должны выдерживать: ток, равный в 1, 5 раза номинальному току не менее 2 минут. Для многофазных двигателей с номинальной мощностью свыше 315 кВт и для всех однофазных двигателей случайная перегрузка по току отсутствует.
Кратковременная крутящаяся перегрузка моторов
Коммутатор должен выдерживать в 1, 5 раза номинальный ток в течение 60 с при соответствующей комбинации следующих условий. Многофазные асинхронные двигатели и двигатели постоянного тока Двигатели, независимо от их типа нагрузки и конструкции, должны выдерживать 15 секунд без остановки или внезапного изменения перегрузки по крутящему моменту, 60% от их номинального крутящего момента, причем напряжение и частота поддерживаются с номинальными значениями.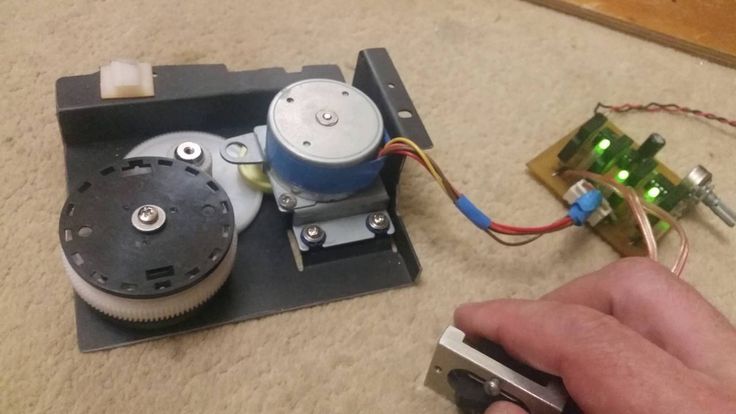 Для двигателей постоянного тока крутящий момент должен быть выражен в терминах перегрузки по току.
Для двигателей постоянного тока крутящий момент должен быть выражен в терминах перегрузки по току.
- три провода на фазу;
- шесть на выходной сигнал.
Микроконтроллер двигателя привода можно применять с целью активизации транзистора в той или иной последовательности.
А обмотки можно также подключать при помощи прикосновения проводов соединения вместе с постоянными магнитами привода. При соединении катушечных клемм, повернуть вал будет затруднительно. Сопротивление между катушечным торцом и общим проводом равно половине сопротивления катушечных и проводных торцов. Это выглядит так, поскольку общий провод имеет большую длину, нежели половинная часть, используемая для соединения катушек.
Двигатели, предназначенные для специального использования, требующие высокого крутящего момента, должны быть согласованы. В случае асинхронных короткозамыкающих двигателей, разработанных специально для достижения пускового тока менее чем в 4, 5 раза выше номинального тока, перегрузка момента может составлять менее 60% от значения, указанного в первом абзаце, но не менее 50%.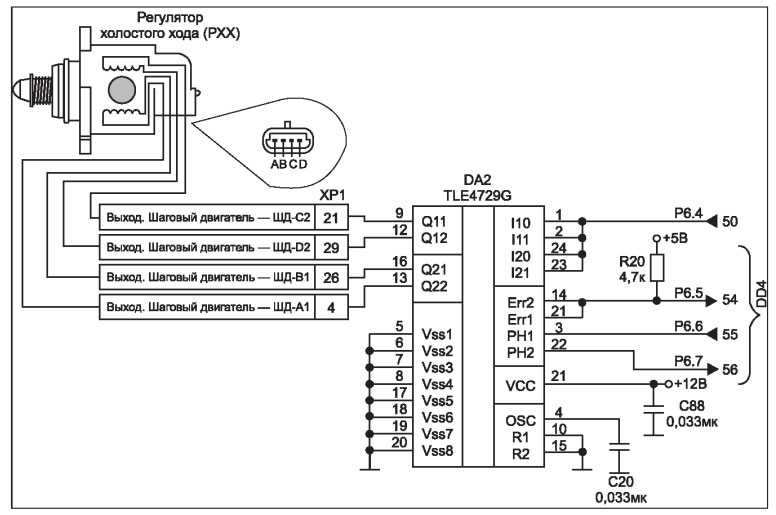
В случае специальных типов асинхронных двигателей со специальными характеристиками запуска, таких как двигатели с переменной частотой вращения или асинхронные двигатели, работающие от статических преобразователей, значение перегрузки по крутящему моменту должно быть согласовано. Если не оговорено иное, многофазный синхронный двигатель должен выдерживать, независимо от нагрузки, в течение 15 секунд перегрузку крутящего момента, описанную ниже, без отказа от синхронизации при поддержании возбуждения со значением, соответствующим номинальной нагрузке.
Биполярные шаговые двигатели имеют одну фазовую обмотку, в которую ток поступает переломным способом с применением магнитного полюса. Управляющая система в данном случае будет сложной с использованием соединяющего моста. На фазу имеется в наличии два провода, но они не общие. При смешении сигнала шагового двигателя на высоких частотах, эффект трения системы может быть снижен.
Кроме того, еще одним типом шагового двигателя является трехфазный, но сфера его применения слишком узкая:
- при работе фрезерных станков с ЧПУ;
- на некоторых автомобилях, где применяется дроссельная заслонка;
- на дисководе и принтерах некоторых марок.
Реактивные шаговые двигатели: особенности и принцип работы
Стоит отметить, что активные шаговые приводы имеют большой недостаток: это крупный шаг, достигающий нескольких десятков градусов. В отличие от них, реактивные шаговые двигатели способны редуцировать роторную частоту , благодаря чему шаг становится угловым менее градуса.
Главной особенностью реактивного привода является то, что зубцы размещены на статорных полюсах. Синхронизирующий момент в нем обеспечивается разницей магнитных сопротивлений по поперечной и продольной оси привода.
Реактивный шаговый двигатель имеет один ключевой недостаток: в нем отсутствует синхронизирующий момент , если обмотки статора обесточены.
Повысить степень редукции двигателя, причем независимо какого, активного или реактивного, можно при использовании многопакетных конструкций, когда зубцы статора сдвигаются друг на друга на часть деления, а ротора каждого пакета не сдвигаются и оси их полюсов одинаковые. Подобная конструкция очень сложная в плане создания и стоит в готовом виде недешево, также к ней потребуется сложный коммутатор.
Подобная конструкция очень сложная в плане создания и стоит в готовом виде недешево, также к ней потребуется сложный коммутатор.
На сегодняшний день в продаже можно отыскать огромное количество всевозможных конструкций двигателей, которые отличаются по таким параметрам, как:
- количество фаз;
- тип размещения обмотки;
- способы фиксации ротора и т.д.
В индукторных шаговых двигателях момент вращения создается при взаимодействии магнитного поля, которое создается статорными обмотками и постоянного магнита, располагаемого в зубчатой части зазора.
Синхронизирующий момент в индукторном двигателе сам по себе реактивный, благодаря чему получается статорная обмотка, а постоянный магнит способен создавать момент фиксации, благодаря чему ротор удерживается в нужном положении при отсутствующем токе.
В отличие от реактивного шагового двигателя, индукторный, при аналогичном шаге, имеет больший синхронизирующий момент, а также более улучшенные технические характеристики.
Синхронные линейные шаговые двигатели
С целью автоматизации некоторых производственных процессов на предприятии, иногда возникает необходимость перемещения объектов в плоскости. Чтобы это сделать, потребуется использовать специальный преобразователь вращательного движения в поступательное, что достигается путем применения кинематики.
При помощи линейных шаговых двигателей можно преобразовать импульсную команду прямо в линейное перемещение, что значительно упростит кинематическую схему всевозможных электрических приводов.
Статор в данном приводе представлен в виде магнитомягкой плиты, а провода подмагничиваются путем работы постоянного магнита.
Зубцовые деления в статоре и подвижной части одинаковые, при этом они могут быть сдвинуты на половину деления в пределах одного провода ротора. Поток подмагничивания и его магнитное сопротивление, в данном случае, не зависят от того, где находится подвижная часть двигателя.
Чтобы переместить объект в плоскости согласно двум координатам, применяют двигатели двухкоординатного типа.
Также в линейных двигателях используется магнитно-воздушная подвеска. Благодаря силе магнитного притяжения ротор притягивается к статору. Далее под ротор сквозь форсунки нагнетают воздух в сжатом виде, вследствие чего появляется сила, отталкивающая ротор от статора. Так между ними возникает воздушная подушка и ротор висит над статором с наличием минимально зазора. Это и обеспечивает минимум сопротивления движения ротора и высокоточное позиционирование.
Привод способен работать устойчиво при условии отсутствия потерь шагов во время отработки угла при подаче на обмотки управления импульсных серий. При отработке каждого шага ротор имеет уверенное равновесие по отношению к вектору магнитной индукции, относящейся к магнитному полю статора.
Режим отработки каждого шага должен соответствовать количеству импульсов управления, которые подаются на обмотки привода, а он при этом, до момента прихода следующего импульса, должен отработать заданный ему угол вращения. В начале каждого из шагов угловая двигательная скорость должна быть нулевой.
В начале каждого из шагов угловая двигательная скорость должна быть нулевой.
Допускаются колебания углового приводного вала по отношению к установившемуся значению. Они обуславливаются наличием кинетической энергии, которая накапливается двигательным валом во время отработки угла. При этом энергия способная преобразовываться в потери:
- магнитные;
- механические;
- электрические.
Чем больше их величина, тем быстрее кончается процесс перехода отработки одного шага приводом.
При запуске ротор может иметь отставание от статорного потока на шаг и даже больше, вследствие чего получается расхождение между количеством роторных шагов и статорным потоком.
Ключевые характеристики шагового двигателя – это:
- предельная механическая характеристика;
- приемистость.
Предельная характеристика представляет собой зависимость максимально возможного синхронизирующего момента от частот управляющих импульсов.
А приемистостью называется частота этих импульсов, которая исключает возможность потерь или добавлений шага во время обработки. Приемистость считается ключевым показателем режима перехода в двигателе. Она способна расти вместе с синхронизирующим моментом, снижением шага, инерционным моментом линейно перемещаемых или вращаемых частиц, а также статического момента сопротивления.
Приемистость считается ключевым показателем режима перехода в двигателе. Она способна расти вместе с синхронизирующим моментом, снижением шага, инерционным моментом линейно перемещаемых или вращаемых частиц, а также статического момента сопротивления.
Особенности подключения шагового двигателя
Подключить двигатель шагового типа можно по той или иной схеме, которая зависит от количества проводов и способов запуска.
Двигатели могут иметь от четырех до восьми проводов. Если их всего четыре, то применение двигателя возможно только с биполярным устройством. Каждая фазная обмотка, которых всего две, оснащена двумя проводами. Определять проводные пары следует с использованием метра, затем подключается драйвер пошаговым методом.
Мотор, оснащенный шестью проводами, включает в себя два провода для каждой обмотки и центральный кран, тоже для каждой из них. Его можно подключать и к однополярному, и к биполярному устройству. Для разделения привода следует применять специальный прибор для измерения. К однополярному устройству привод можно подключать с использованием всех шести проводов, а к однополярному будет достаточного одного конца и одного центрального крана от каждой обмотки.
К однополярному устройству привод можно подключать с использованием всех шести проводов, а к однополярному будет достаточного одного конца и одного центрального крана от каждой обмотки.
Пятипроводной мотор практически не отличается от предыдущего, однако, его центральные клеммы изнутри соединены как один сплошной кабель и имеют один выход к одному из проводов. Не следует отделять обмотки друг от друга, иначе можно их разорвать. Вместо этого лучше определить центр провода и соединить его с другими проводниками, это будет максимально эффективное решение подключения. После этого можете подключать само устройство и проверять его на работоспособность.
Ключевые технические характеристики двигателей
Первичная обмотка при постоянном токе создает номинальное напряжение. А первоначальная скорость крутящего момента привода меняется вместе с током. От того, какова схема двигателя и от индуктивности его обмоток зависит время снижения линейного момента на более высоких скоростях. Некоторые марки двигателей, имеющие степень защиты IP65, способны работать в самых трудных условиях.
Некоторые марки двигателей, имеющие степень защиты IP65, способны работать в самых трудных условиях.
Если вы желаете выбрать готовую модель шагового двигателя отечественного производства, обратите внимание на основные технические характеристики наиболее известных моделей:
- ШД-1 – градус шага равен 15, 4 фазы, крутящий момент составляет 40 Нт;
- ДШ-0,04А – градус шага 22,5, 4 фазы, крутящий момент 100 Нт;
- ДШИ 200 – градус шага 1,8, 4 фазы, крутящий момент 0,25 Нт;
- ДШ-6 – градус шага – 18, 4 фазы, крутящий момент 2300 Нт.
Также среди покупателей спросом пользуются такие модели, как:
- четырехфазный ДШР-40;
- SM-200-0.22;
- Purelogic R&D с энкодером;
- NEMA 23;
- STH-39D1112;
- SP-57;
- SanyoDenkiSM28.
При подборе нужного двигателя, необходимо произвести расчет параметров мощности, напряжения и крутящего момента.
Одной из проблем работы шагового двигателя является управление приборов при отсутствии контроллера. Чтобы с этим справиться, следует взять специальный блок логической связи , помогающий управлять двигателем при отсутствии соответствующей микросхемы. Однако, лучше всего контролировать работу шаговых двигателей при помощи специального контроллера.
Чтобы с этим справиться, следует взять специальный блок логической связи , помогающий управлять двигателем при отсутствии соответствующей микросхемы. Однако, лучше всего контролировать работу шаговых двигателей при помощи специального контроллера.
Средняя стоимость шагового привода в крупных городах России и Украины
Стоимость данного прибора зависит непосредственно от таких показателей, как:
Средняя стоимость однополярного шагового двигателя составляет:
- Москва – 3000 у.е.;
- Санкт-Петербург – 3500 у.е.;
- Киев – 3500 у.е.;
- Харьков – 4000 у.е.
Итак, мы рассказали, что такое шаговый двигатель, по какому принципу он работает, на какие категории подразделяется и какими свойствами отличается. Надеемся, что это облегчит ваш выбор при необходимости приобретения данного устройства.
Cтраница 3
Основные размеры и характеристика тяговых колесных пар ВНИИПТмаш приведены в табл. 6.2. Путем замены четырех-полюсного электродвигателя фланцевым двухполюсным электродвигателем со встроенным электромагнитным тормозом можно увеличить скорость движения тележки в 2 раза, а при применении электродвигателей с переменным числом полюсов можно получить две ступени рабочих скоростей.
| Схема подземной кустовой. |
В установках погружных винтовых электронасосов применяются четырехполюсные электродвигатели с частотой вращения вала 1500 об / мкн (синхронных), а в установках погружных центробежных электронасосов – двухполюсные электродвигатели с частотой вращения вала 3000 об / мин.
Все эти компрессоры одноцилиндровые, имеют диаметр цилиндра 36 мм, код поршня 19 мм, объем, описываемый поршнем, 0 87 дм3 – с. Применены трехфазные двухполюсные электродвигатели АВК2 – 0 7; АЭК2 – 0.7 и АЭК2 – 1 (соответственно), характеристики которых приведены в табл. V-14.
ЭПУ имеет механизм автоматического управления звукоснимателем. Работает ЭПУ о т асинхронного однофазного двухполюсного электродвигателя С конденсаторным пуском Частота вращения ротора 2800 об / мин. Для сниже ния уровня фона электродвигатель заключен в пермаллоевый экран.
Если, например, в статоре двухполюсного электродвигателя имеется 12 пазов, то на один полюс приходится шесть пазов и в этих шести пазах должны разместиться стороны катушек всех трех фаз, создающих данный полюс. Поэтому при конструировании и составлении схем обмотки число пазов на полюс и фазу является характерной и решающей величиной.
Поэтому при конструировании и составлении схем обмотки число пазов на полюс и фазу является характерной и решающей величиной.
Защищенные и закрытые обдуваемые электродвигатели при одинаковых значениях мощности и скорости вращения имеют совпадающие установочные размеры. Исключением из этого общего правила являются двухполюсные электродвигатели в закрытом обдуваемом исполнении, у которых мощности на одну ступень ниже, чем у электродвигателей защищенного исполнения. При этом у двухполюсных электродвигателей А и АО 6, 7, 8 и 9-го габаритов на мощности 14, 28, 55 и 100 кет установочные размеры совпадают.
Расчет начинаем с электродвигателей постоянного тока, так как расчет их проще и понятнее, чем электродвигателей переменного тока. Здесь дано подробное объяснение всех расчетных величин, которые потом будут встречаться и в электродвигателях переменного тока. Расчет приведен для двухполюсных электродвигателей с последовательным возбуждением.
Применяют также и винтовые электронасосы, которые внешне от обычных ЭЦН не отличаются. В этом случае нефть из скважин на поверхность подается не центробежным, а винтовым (одновинтовым) насосом. В таких насосах применяют четырехполюсные синхронные электродвигатели с частотой вращения вала 1500 об / мин, а в обычных ЭЦН – двухполюсные электродвигатели с частотой вращения вала 3000 об / мин.
В этом случае нефть из скважин на поверхность подается не центробежным, а винтовым (одновинтовым) насосом. В таких насосах применяют четырехполюсные синхронные электродвигатели с частотой вращения вала 1500 об / мин, а в обычных ЭЦН – двухполюсные электродвигатели с частотой вращения вала 3000 об / мин.
Щетки должны прижиматься к поверхности коллектора. Для этого служат щеткодержатели. Над щеткой помещается спиральная пружинка из тонкой проволоки. Сверху на трубку навинчен колпачок 5, который удерживает щетку и пружинку от выпадания из трубки. Щеткодержатель запрессовывается в стенку корпуса электродвигателя. В двухполюсном электродвигателе должны быть два щеткодержателя со щетками. Они должны быть установлены так, чтобы щетки стояли между полюсами магнитной системы электродвигателя. Щеткодержатели должны быть изолированы друг от друга и от корпуса электродвигателя. Для отвода тока к щеткодержателю должен быть привинчен или припаян изолированный проводник.
Генерация энергии с помощью шагового двигателя
Генерация энергии с помощью шагового двигателя | Специалисты по цепям перейти к содержанию Делиться: 25 января 2012 г.
Вы хотите генерировать мощность на приличном уровне, но не знаете, какой тип приложения использовать? Электрический шаговый двигатель может быть решением, которое вы ищете.
Шаговые двигатели могут генерировать мощность от десятых долей ватта до нескольких ватт. В следующей статье показано, как 4-фазный униполярный шаговый двигатель способен создавать мощность ½ ватта.
Первое, что нужно учитывать, это цена шаговых двигателей. Они очень дешевые, всего около 10 долларов или около того, плюс их можно найти во многих старых машинах. Однако, поскольку они стоят так хорошо, не стоит тратить время на спасение одного из старого компьютера. Кроме того, некоторые из двигателей, которые вы найдете в этих старых машинах, могут не соответствовать тем же стандартам, что и новый двигатель.
Помните, что шаговые двигатели генерируют мощность при низких оборотах, что делает генерирование мощности опцией. Полезная мощность может быть получена всего за несколько сотен оборотов в минуту. Подобно ветряным турбинам и другим источникам энергии с низким числом оборотов, это означает, что шаговый двигатель может приводиться в действие непосредственно от источника без использования зубчатой передачи. Достижение уровня эффективности выше 35% возможно. Все зависит от того, как загружен мотор, и число выше 35% неплохо, учитывая цену мотора.
Поскольку шестерни и ремни не используются для производства мощности, используется меньшее трение. Это означает, что теряется меньше энергии, а детали с меньшей вероятностью ломаются. Поскольку шаговые двигатели бесщеточные, единственными изнашиваемыми деталями являются валы, прижатые к подшипникам.
Подобно ветряным турбинам и другим источникам энергии с низким числом оборотов, это означает, что шаговый двигатель может приводиться в действие непосредственно от источника без использования зубчатой передачи. Достижение уровня эффективности выше 35% возможно. Все зависит от того, как загружен мотор, и число выше 35% неплохо, учитывая цену мотора.
Поскольку шестерни и ремни не используются для производства мощности, используется меньшее трение. Это означает, что теряется меньше энергии, а детали с меньшей вероятностью ломаются. Поскольку шаговые двигатели бесщеточные, единственными изнашиваемыми деталями являются валы, прижатые к подшипникам.
Еще одна причина, по которой шаговый двигатель очень популярен, — это его характеристики крутящего момента.
Крутящий момент будет удерживать двигатель с точными шагами вращения, даже если на двигатель не подается питание. Высокий крутящий момент превысит крутящий момент сопротивления вращению и приведет к неэффективной работе при низких уровнях мощности. Это краткое введение в то, как шаговый двигатель может создавать энергию для различных приложений. Более подробные статьи доступны в Интернете, и в будущем на сайт будет добавлено больше статей. Чтобы узнать больше о шаговых двигателях и о том, как их можно использовать, посетите остальную часть блога.
Это краткое введение в то, как шаговый двигатель может создавать энергию для различных приложений. Более подробные статьи доступны в Интернете, и в будущем на сайт будет добавлено больше статей. Чтобы узнать больше о шаговых двигателях и о том, как их можно использовать, посетите остальную часть блога.
Подано в: Электричество, Генерация энергии, Шаговые двигатели
Делиться: Предыдущая статья Проект «Умный дом» — часть 4Выберите первый элемент для сравнения
Выберите второй элемент для сравнения
Выберите третий элемент для сравнения
Сравнивать
Генератор импульсных сигналов для регулятора скорости контроллера драйвера шагового двигателя
поиск
Время отправки заказа от 3 до 24 часов
Вам также может понравиться
Быстрый просмотр
29,99 €
Быстрый просмотр
29,99 €
Быстрый просмотр
15,99 €
Быстрый просмотр
59,99 €
Клиенты, которые купили этот товар, также купили:
Быстрый просмотр
29,99 €
Быстрый просмотр
15,99 €
Быстрый просмотр
14,99 €
Быстрый просмотр
Быстрый просмотр
69,99 €
Быстрый просмотр
Быстрый просмотр
Быстрый просмотр
43 других продукта в этой же категории:
Быстрый просмотр
69,99 €
-€20. 00
€49,99
00
€49,99
- В продаже!
- -20,00 €
Быстрый просмотр
Быстрый просмотр
Быстрый просмотр
109,99 €
Быстрый просмотр
11,99 €
Быстрый просмотр
Быстрый просмотр
Быстрый просмотр
49,99 €
Быстрый просмотр
Быстрый просмотр
Быстрый просмотр
Быстрый просмотр
Быстрый просмотр
24,99 €
Быстрый просмотр
89,99 €
Быстрый просмотр
17,99 €
Быстрый просмотр
Быстрый просмотр
Быстрый просмотр
49,99 €
Быстрый просмотр
15,99 €
Быстрый просмотр
Быстрый просмотр
Быстрый просмотр
79,99 €
Быстрый просмотр
54,99 €
-€15.
