
Инерционный датчик
Изобретение относится к области приборостроения, а именно к инерционным датчикам порогового действия, и предназначено для контроля за достижением ускорениями, действующими на объект при столкновении с другими объектами, например, при транспортных авариях, пороговых уровней. Инерционный датчик содержит размещенное в корпусе с упором инерционное тело, поджатое к одной стороне упора и имеющее со стороны опорной поверхности хвостовую часть. Датчик имеет неподвижный контакт в виде кольца, размещенного на другой стороне упора и соединенного с одним токовыводом, и подвижный контакт, который закреплен на хвостовой части инерционного тела и соединен гибким токопроводом с другим токовыводом. Технический результат – повышение надежности замыкания электрических контактов датчика и отсутствие самопроизвольного срабатывания датчика при поломке рабочей пружины. 1 ил.
Изобретение относится к области приборостроения, а именно к инерционным датчикам порогового действия.
Инерционные датчики порогового действия устанавливаются, как правило, на движущихся объектах для контроля за достижением ускорениями, действующими на объект при столкновении с другими объектами, например при транспортных авариях, пороговых уровней.
Известны инерционные датчики порогового действия (см. патент США №4789762, кл. Н01Н 35/14, опубл. в 1988 г., авторское свидетельство №922906, кл. Н01Н 35/14, опубл. в БИ №15 в 1982 г.), у которых чувствительный элемент представляет собой инерционное тело, установленное на винтовой пружине в корпусе датчика. При этом на инерционном теле датчика размещается подвижный электрический контакт, а на корпусе датчика – неподвижный электрический контакт. Винтовая пружина является упругим элементом, обеспечивающим начальное усилие поджатия инерционного тела к корпусу датчика. Величина отношения начального усилия поджатия к массе инерционного тела определяет величину порога по ускорению срабатывания датчика. При действии на датчик ускорения возникает сила инерции, которая стремится переместить инерционное тело в том случае, когда ее величина превышает начальное усилие поджатия пружины.
Недостатком аналога (патент США №4789762) является ненадежная гальваническая связь между токовыводом и подвижным электрическим контактом вследствие того, что токоподвод к подвижному электрическому контакту, являющемуся одновременно инерционным телом, осуществляется через корпус и (или) винтовую пружину. Кроме того, в связи с тем, что корпус датчика является токопроводом, то при необходимости электрической изоляции корпуса датчика от места его установки изоляционный материал будет искажать входной сигнал (импульс ударного ускорения), передаваемый чувствительному элементу датчика.
Общие недостатки аналогов заключаются в следующем. Размещение токовыводов на противоположных торцах корпуса датчика приводит к тому, что при установке датчика необходимо предусматривать в поверхности, на которую он устанавливается, места для размещения токовыводов, что усложняет как крепление датчика, так и размещение электрических проводов, идущих от датчика. Наличие неподвижного электрического контакта в зоне размещения опорной поверхности рабочей пружины усложняет или делает невозможным установку регулировочного устройства, изменяющего степень сжатия пружины и позволяющего более точно настраивать датчик на необходимый порог по ускорению срабатывания.
Наличие неподвижного электрического контакта в зоне размещения опорной поверхности рабочей пружины усложняет или делает невозможным установку регулировочного устройства, изменяющего степень сжатия пружины и позволяющего более точно настраивать датчик на необходимый порог по ускорению срабатывания.
Прототипом предлагаемого технического решения является инерционный датчик, описанный в патенте DE №2826306 С3, кл. Н01Н 35/14, опубл. в 1982 г.
Датчик содержит размещенное в корпусе с упором инерционное тело, поджатое рабочей пружиной к одной стороне упора. На другой стороне упора расположены два неподвижных контакта, имеющих форму полуколец. Неподвижные контакты электрически изолированы от корпуса датчика и соединены с токовыводами. При этом оба токовывода расположены со стороны одной торцевой поверхности корпуса датчика. Инерционное тело имеет хвостовую часть, к которой поджат пружиной подвижный контакт в виде тонкостенной втулки. Подвижный контакт обеспечивает перемыкание неподвижных контактов при перемещении инерционного тела на величину межконтактного зазора.
Основной недостаток прототипа состоит в ненадежном перемыкании двух неподвижных электрических контактов подвижным контактом – втулкой, так как разместить рабочие поверхности двух электрических контактов на одном уровне технологически очень сложно. Поэтому касание втулкой обоих электрических контактов при перемещении инерционного тела на величину межконтактного зазора – расстояния между неподвижными контактами и втулкой – будет происходить неодновременно и для надежного перемыкания контактов требуются дополнительное поджатие пружиной втулки к неподвижным контактам и нежесткое соединение втулки с инерционным телом для обеспечения возможного поворота, необходимого для касания втулкой обеих поверхностей неподвижных контактов.
Наличие пружины, поджимающей втулку к хвостовой части инерционного тела, а затем к неподвижным контактам при перемещении инерционного тела на величину межконтактного зазора, существенно снижает надежность датчика. Это связано с тем, что направление силы поджатия противоположно направлению восстанавливающей силы рабочей пружины, поэтому при поломке рабочей пружины втулка, перемещаясь под действием пружины, перемкнет контакты, и датчик выдаст ложный сигнал о срабатывании при отсутствии ускорения, действующего на датчик.
Кроме того, для обеспечения более широкой диаграммы чувствительности датчика необходимо, чтобы инерционное тело дополнительно имело возможность поворота относительно оси датчика. При этом втулка будет касаться только одного контакта и перемыкания неподвижных электрических контактов не произойдет.
Задача, на решение которой направлено заявляемое техническое решение, заключается в создании датчика, имеющего повышенную надежность.
Технические результаты, получаемые при осуществлении изобретения, заключаются в повышении надежности замыкания электрического контакта и отсутствии самопроизвольного срабатывания датчика при поломке рабочей пружины.
Эти технические результаты получены за счет того, что в инерционном датчике, содержащем размещенное в корпусе с упором инерционное тело, поджатое к одной стороне упора и снабженное со стороны опорной поверхности хвостовой частью, контактную систему, включающую неподвижный контакт, размещенный на другой стороне упора, подвижный контакт и токовыводы, расположенные со стороны хвостовой части инерционного тела, новым является то, что неподвижный контакт выполнен в виде кольца, соединенного с одним из токовыводов, а подвижный контакт закреплен на хвостовой части инерционного тела и соединен гибким токопроводом с другим токовыводом.
Выполнение неподвижного электрического контакта в виде кольца, соединение его с одним токовыводом и закрепление подвижного электрического контакта на хвостовой части инерционного тела позволяет обеспечить надежное замыкание электрического контакта при любом виде перемещения инерционного тела.
Благодаря тому, что подвижный контакт, закрепленный на хвостовой части инерционного тела, соединен с токовыводом гибким токопроводом, выполненным, например, в виде винтовой пружины, повышается надежность датчика, так как указанная пружина, работая в исходном состоянии на растяжение, обеспечивает дополнительное усилие поджатия инерционного тела к упору. При этом параметры пружин выбираются из условия – рабочая пружина обеспечивает 60-80% суммарного усилия поджатия, необходимого для обеспечения требуемого порога по ускорению срабатывания, а пружина-токоподвод, соответственно, – остальные 20-40%. Поэтому в случае поломки рабочей пружины пружина-токоподвод не даст переместиться инерционному телу и замкнуться электрическому контакту при отсутствии инерционных нагрузок.
На приведенном чертеже изображена конструктивная схема датчика.
Датчик состоит из корпуса 1, инерционного тела 2, поджатого рабочей пружиной 3 к упору в корпусе. Пружина 3 опирается на регулировочный винт 6. На противоположной стороне упора расположен неподвижный электрический контакт 4 в виде кольца, который электрически изолирован от корпуса 1 датчика. Неподвижный электрический контакт 4 соединен с одним из двух токовыводов 7, расположенных со стороны одной торцевой поверхности корпуса 1 датчика. Подвижный электрический контакт 5 закреплен на хвостовой части инерционного тела 2. Подвижный контакт 5 связан с другим токовыводом 7 гибким токопроводом, например, в виде конической винтовой пружины 8.
Электрические контакты 4 и 5 могут иметь разнообразную форму поперечного сечения, но их форма и диаметры должны быть подобраны таким образом, чтобы при любом перемещении инерционного тела, включая поворот относительно оси датчика, происходило их контактирование, то есть замыкание электрического контакта.
Для точной регулировки межконтактного зазора подвижный контакт 5 имеет с хвостовой частью инерционного тела 2 резьбовое соединение. После выставления необходимого межконтактного зазора контакт 5 закрепляется неподвижно на хвостовой части инерционного тела 2, например, с помощью сварки.
Для обеспечения более широкой диаграммы чувствительности датчика рабочую пружину 3 целесообразно использовать конической формы с опорой витка малого диаметра на головку регулировочного винта 6. В этом случае пружину 3 можно расположить внутри инерционного тела 2. При этом масса пружины 3 будет существенно меньше массы инерционного тела 2, что положительно скажется на динамические характеристики чувствительного элемента датчика. Кроме того, такое расположение рабочей пружины 3 и регулировочного винта 6 позволит также уменьшить габариты датчика.
Датчик работает следующим образом.
При действии на датчик ускорения а возникает действующая на чувствительный элемент сила инерции Р=m·а, где m – масса инерционного тела.
Инерционный датчик, содержащий размещенное в корпусе с упором инерционное тело, поджатое к одной стороне упора и снабженное со стороны опорной поверхности хвостовой частью, и контактную систему, включающую неподвижный контакт, размещенный на другой стороне упора, подвижный контакт и токовыводы, расположенные со стороны хвостовой части инерционного тела, отличающийся тем, что неподвижный контакт выполнен в виде кольца, соединенного с одним из токовыводов, а подвижный контакт закреплен на хвостовой части инерционного тела и соединен гибким токопроводом с другим токовыводом.
Инерционный выключатель топлива в авто: для чего нужен и как пользоваться – Лайфхак
- Лайфхак
- Эксплуатация
Фото: АвтоВзгляд
Любой автомобиль — это средство передвижения, несущее повышенную опасность и пешеходам, и другим участникам движения, и самому водителю. Поэтому автопроизводители максимально неустанно заботятся о безопасности. Например, в автомобилях есть инерционный выключатель топлива. Портал «АвтоВзгляд» выяснил, для чего он нужен и где его искать.
Поэтому автопроизводители максимально неустанно заботятся о безопасности. Например, в автомобилях есть инерционный выключатель топлива. Портал «АвтоВзгляд» выяснил, для чего он нужен и где его искать.
Ефим Розкин
Инерционный выключатель топлива есть во многих машинах. В более старых моделях он представлен в виде механической кнопки. В современных автомобилях это действительно умный датчик, управляемый электронным блоком управления. Какую функцию он несет?
В дороге может произойти и мелкое ДТП, и авария посерьезнее. И во-втором случае доли секунд могут решить, будут ли жить те, кто в нее попал или нет. Все дело в том, что риск возгорания автомобиля при сильном столкновении крайне высок. И автопроизводители придумали, как этого избежать.
Решение довольно простое — отключить подачу топлива. В старых автомобилях это делается посредством нажатия специальной кнопки, которая может быть расположена в салоне, в багажнике, под передним пассажирским или водительским креслом, под капотом непосредственно у бензонасоса, в ногах со стороны водителя или в любом другом месте, о котором стоит знать — это прописано в инструкции по эксплуатации к автомобилю. Нажав такую кнопку, вы принудительно отключаете бензонасос. Топливо перестает поступать по магистрали в двигатель, и таким образом риск возгорания минимизируется.
Нажав такую кнопку, вы принудительно отключаете бензонасос. Топливо перестает поступать по магистрали в двигатель, и таким образом риск возгорания минимизируется.
Фото: АвтоВзгляд
В современных автомобилях установлен инерционный датчик, который срабатывает от удара или резкого толчка, а также других различных потенциально опасных условий, передавая сигнал электронике прекратить подачу топлива.
Стоит ли говорить, что необходимо, во-первых, знать, где расположен такой датчик и заветная кнопка. А во-вторых, быть уверенным в их работоспособности. За время эксплуатации автомобиля они вполне могут засорится или вовсе выйти из строя, никак не обозначив себя в системе оповещения бортового компьютера.
Поэтому будет не лишним пару раз в год устраивать данной системе проверку. Благо делать это не сложно. Достаточно нажать кнопку, если автомобиль старый или в автосервисе попросить проверить инерционный датчик по компьютеру, и попробовать завести автомобиль. Не заводится — значит, порядок. В противном случае датчик следует отремонтировать. Такие проверки особенно важны в сезон отпусков, когда предстоит автопутешествие на большие расстояния. В дороге всякое может случится, и лучше быть к этому готовым.
В противном случае датчик следует отремонтировать. Такие проверки особенно важны в сезон отпусков, когда предстоит автопутешествие на большие расстояния. В дороге всякое может случится, и лучше быть к этому готовым.
- Автомобили
- Автопром
Самые ненадежные машины из Страны восходящего солнца
65333
- Автомобили
- Автопром
Самые ненадежные машины из Страны восходящего солнца
65333
Подпишитесь на канал «Автовзгляд»:
- Telegram
- Яндекс.Дзен
автосервис, ремонт, дорога, трасса, лайфхак
Инерциальные датчики – д-р Костас Алексис
Инерциальные датчики
Инерционные датчики – это датчики, основанные на инерции и соответствующих принципах измерения. Они варьируются от инерциальных датчиков микроэлектромеханических систем (МЭМС) размером всего несколько миллиметров до кольцевых лазерных гироскопов, которые представляют собой высокоточные устройства размером до 50 см. В этой заметке мы кратко обобщим эти случаи инерциальных датчиков, которые наиболее важны для автономной навигации беспилотных летательных аппаратов. Инерциальные датчики для воздушной робототехники обычно представляют собой блок инерциальных измерений (IMU), который состоит из акселерометров, гироскопов, а иногда и магнитометров. Далее мы кратко изложим основные принципы работы акселерометров и гироскопов, широко применяемых в беспилотной авиации. 92 прямо вверх. Напротив, акселерометры при свободном падении, движущиеся по орбите и ускоряющиеся под действием силы тяжести Земли, будут измерять ноль.
В этой заметке мы кратко обобщим эти случаи инерциальных датчиков, которые наиболее важны для автономной навигации беспилотных летательных аппаратов. Инерциальные датчики для воздушной робототехники обычно представляют собой блок инерциальных измерений (IMU), который состоит из акселерометров, гироскопов, а иногда и магнитометров. Далее мы кратко изложим основные принципы работы акселерометров и гироскопов, широко применяемых в беспилотной авиации. 92 прямо вверх. Напротив, акселерометры при свободном падении, движущиеся по орбите и ускоряющиеся под действием силы тяжести Земли, будут измерять ноль.
Акселерометры представляют собой электромеханические устройства, способные измерять статические и/или динамические силы ускорения. Статические силы включают гравитацию, а динамические силы могут включать вибрации и движение. Акселерометры могут измерять ускорение по 1, 2 или 3 осям. В настоящее время 3-осевые устройства становятся все более распространенными из-за значительного снижения стоимости. На рис. 1 изображены оси, имеющиеся на таком устройстве. Подчеркнуто, что акселерометр будет измерять по собственному эталону и на основе воздействия на него внешних сил.
На рис. 1 изображены оси, имеющиеся на таком устройстве. Подчеркнуто, что акселерометр будет измерять по собственному эталону и на основе воздействия на него внешних сил.
Рис. 1: Оси 3-осевого акселерометра.
Упрощенная модель акселерометра представлена на рис. 2. Он состоит из массы (m), пружинно-демпферной системы (k,c), преобразователя и габаритного узла, жестко прикрепленного к транспортному средству. Смещение транспортного средства от инерционно-закрепленной точки обозначается как d, а смещение пробной массы m от ее точки покоя обозначается как x. Следовательно: | Рис. 2: Упрощенная модель акселерометра. |
где α — ускорение (вторая производная от d). По сути, это линейная инвариантная во времени (LTI) модель второго порядка. В качестве входных данных используется реальное ускорение транспортного средства, а выходным сигналом является отрицательная величина указанного времени перемещения пробной массы, км/м..jpg) Его блок-схема показана на рисунке 3.
Его блок-схема показана на рисунке 3.
Рисунок 3: Блок-схема упрощенной модели акселерометра.
Обратите внимание, что для случаев, в которых ускорение транспортного средства является постоянным, выходной сигнал акселерометра в установившемся режиме также является постоянным, что указывает на наличие и значение ускорения. Наконец, как показано выше из ОДУ второго порядка, незатухающая собственная частота и коэффициент затухания акселерометра составляют:
Влияние смещения на акселерометры: измерения акселерометра ухудшаются из-за ошибок шкалы и эффектов смещения. Типичная модель ошибки имеет вид: 9m для измерения и a смещение для смещения измерения.
Ссылки и дополнительная литература:
- Курс “Динамика” MIT OCW, преподаватели: проф. Шейла Видналл, проф. Джон Дейст, проф. Эдвард Грейтцер, http://ocw.mit.edu/courses/aeronautics- and-astronautics/16-07-dynamics-fall-2009/
- Акселерометр в Википедии: https://en.
 wikipedia.org/wiki/Акселерометр
wikipedia.org/wiki/Акселерометр
Гироскопы
Гироскоп концептуально представляет собой вращающееся колесо, в котором ось вращения может принимать любую возможную ориентацию. При вращении ориентация этой оси остается неизменной при наклоне или вращении крепления в соответствии с законом сохранения углового момента. Благодаря этому принципу гироскоп позволяет измерять ориентацию и скорость ее изменения. Слово происходит от греческих «γύρος» и σκοπεύω, что означает «круг» и «смотреть» соответственно. В настоящее время мы в основном используем гироскопы, основанные на разных принципах работы. В авиации мы уделяем особое внимание гироскопам MEMS или твердотельным кольцевым лазерам, а также волоконно-оптическим гироскопам. В мелкомасштабной воздушной робототехнике нас в основном интересуют гироскопы MEMS. Гироскопы также называются “гироскопами” на обычном бытовом техническом языке. На рис. 4 представлен чертеж компонента гироскопа по трем осям. | Рис. 4: 3 направления ориентации, измеренные 3-осевым гироскопом. |

Чтобы интуитивно понять работу гироскопа, можно представить, что он находится в центре вращающегося колеса. Затем будет измерена угловая скорость оси Z гироскопа. Тогда две другие оси не будут измерять вращение или его изменение. Классический поворотный гироскоп основан на законе изменения углового момента. Проще говоря, этот закон гласит, что общий угловой момент системы остается постоянным как по величине, так и по направлению результирующего внешнего крутящего момента, действующего на систему, равного нулю. Гироскопы, использующие этот принцип, обычно состоят из вращающегося диска или массы на оси, которая затем устанавливается на ряд шарниров. Каждый из этих карданов обеспечивает вращающемуся диску дополнительную степень свободы. По сути, кардан позволяет ротору вращаться без приложения какого-либо внешнего крутящего момента к гироскопу. | Рис. 5: 3D-гироскоп. Изображение воспроизведено с https://commons.wikimedia.org/wiki/File:3D_Gyroscope.png . |
 Следовательно, пока гироскоп вращается, он будет сохранять постоянную ориентацию. В случае наличия в этих устройствах внешних моментов или поворотов вокруг заданной оси ориентация может сохраняться, а измерение угловой скорости — за счет явления прецессии.
Следовательно, пока гироскоп вращается, он будет сохранять постоянную ориентацию. В случае наличия в этих устройствах внешних моментов или поворотов вокруг заданной оси ориентация может сохраняться, а измерение угловой скорости — за счет явления прецессии. Явление прецессии имеет место, когда к объекту, вращающемуся вокруг некоторой оси (своей «оси вращения»), приложен внешний крутящий момент в направлении, перпендикулярном оси вращения (входной оси). Во вращательной системе, когда присутствуют чистые внешние крутящие моменты, вектор углового момента (вдоль оси вращения) будет двигаться в направлении вектора приложенного внешнего крутящего момента. Следовательно, ось вращения вращается вокруг оси, которая перпендикулярна как входной оси, так и оси вращения (теперь это выходная ось).
Это вращение вокруг выходной оси затем воспринимается и передается обратно на входную ось, где мотороподобное устройство прикладывает крутящий момент в противоположном направлении, тем самым отменяя прецессию гироскопа и сохраняя его ориентацию. Чтобы измерить скорость вращения, противодействующий крутящий момент пульсирует через периодические интервалы времени. Каждый импульс представляет собой фиксированный шаг углового вращения, и количество импульсов в фиксированном интервале времени будет пропорционально изменению угла θ за этот период времени. Следовательно, приложенный (известный) противодействующий момент пропорционален измеряемой скорости вращения.
Гироскопы с вибрирующей структурой являются устройствами MEMS (микромеханические электромеханические системы), работа которых основана на вибрирующей конструкции, использующей явление силы Кориолиса. Во вращающейся системе все точки вращаются с одинаковой скоростью. По мере приближения к оси вращения этой системы скорость вращения остается той же, но скорость в направлении, перпендикулярном оси вращения, обязательно уменьшается. | Рис. 6: Концепция силы Кориолиса для измерения скорости вращения. |
 Следовательно, чтобы двигаться по прямолинейному одиночеству к оси вращения или от нее (находясь на вращающейся системе), необходимо отрегулировать поперечную скорость, чтобы сохранить то же относительное угловое положение (долготу) на теле. Сила Кориолиса соответствует произведению массы объекта (долгота которого должна сохраняться) на ускорение, приводящее к требуемому замедлению или ускорению. Сила Кориолиса пропорциональна как угловой скорости вращающегося объекта, так и скорости объекта, движущегося к оси вращения или от нее. На рис. 6 показана концепция.
Следовательно, чтобы двигаться по прямолинейному одиночеству к оси вращения или от нее (находясь на вращающейся системе), необходимо отрегулировать поперечную скорость, чтобы сохранить то же относительное угловое положение (долготу) на теле. Сила Кориолиса соответствует произведению массы объекта (долгота которого должна сохраняться) на ускорение, приводящее к требуемому замедлению или ускорению. Сила Кориолиса пропорциональна как угловой скорости вращающегося объекта, так и скорости объекта, движущегося к оси вращения или от нее. На рис. 6 показана концепция. Что касается фактического способа реализации такого устройства, то гироскоп с вибрирующей структурой содержит микромеханическую массу, которая соединена с внешним корпусом парой пружин. Этот внешний корпус затем соединяется с фиксированной печатной платой с помощью второго набора ортогональных пружин. | Рис. 7: Чертеж гироскопа в виде МЭМС-структуры. |
 Испытательная масса непрерывно движется синусоидально вдоль первого набора пружин. Поскольку любое вращение системы вызовет ускорение Кориолиса в массе, она впоследствии подтолкнет ее в направлении второго набора пружин. Когда масса отклоняется от оси вращения, масса будет толкаться перпендикулярно в одном направлении, а когда она отталкивается назад к оси вращения, она будет толкаться в противоположном направлении из-за силы Кориолиса, действующей на масса. На рис. 7 представлен чертеж МЭМС-гироскопа.
Испытательная масса непрерывно движется синусоидально вдоль первого набора пружин. Поскольку любое вращение системы вызовет ускорение Кориолиса в массе, она впоследствии подтолкнет ее в направлении второго набора пружин. Когда масса отклоняется от оси вращения, масса будет толкаться перпендикулярно в одном направлении, а когда она отталкивается назад к оси вращения, она будет толкаться в противоположном направлении из-за силы Кориолиса, действующей на масса. На рис. 7 представлен чертеж МЭМС-гироскопа. Сила Кориолиса воспринимается и обнаруживается с помощью емкостных сенсорных датчиков, встроенных вдоль корпуса испытательной массы и жесткой конструкции. По мере того как испытательная масса толкается силой Кориолиса, возникает дифференциальная емкость, которая будет обнаруживаться при сближении чувствительных пальцев. Когда масса толкается в противоположном направлении, разные наборы сенсорных пальцев сближаются. Следовательно, датчик может определять как величину, так и направление угловой скорости системы.
Следовательно, датчик может определять как величину, так и направление угловой скорости системы.
Необходимость калибровки: Гироскопы MEMS зависят от температуры и должны быть точно откалиброваны перед началом полезной работы.
Эффекты смещения на гироскопах: Самая большая проблема с гироскопами (и то, что существенно ограничивает нас от простого выполнения действий по интегрированию их измерений) — это наличие эффектов смещения. Смещение в основном вызвано:
- Прохождением возбуждения привода
- Смещениями выходной электроники
- Моментами подшипников
И присутствуют в трех формах, что касается их выражения и изменения во времени, а именно:
- Фиксированное смещение (“const”)
- Изменение смещения от одного включения к другому (тепловое), называемое смещением стабильность («BS»)
- Дрейф смещения, обычно моделируемый как случайное блуждание («BD»)
Эти условия являются аддитивными, поэтому мы можем написать:
, где Q известна, с единицами измерения (град/ч)/кв. м (ч)
м (ч)
Модель шума : Типичная модель шума, используемая для регистрации таких эффектов на гироскопах, имеет вид:
Подчеркнуто, что необходимо учитывать дрейф смещения в динамике фильтра Калмана.
Ссылки и другая дополнительная литература:
- SensorWiki: http://www.sensorwiki.org/doku.php/
- Статья в Википедии о гироскопах: https://en.wikipedia.org/wiki/Gyroscope
- MIT OCW — Устойчивость и управление самолетом — Лекция «Инерциальные датчики, дополнительная фильтрация, простая фильтрация Калмана»
Получить данные с телефона
Смартфон имеет довольно хороший для своей стоимости блок инерциальных измерений, что дает доступ к данным акселерометра и гироскопа. Интуитивное понимание качества данных датчиков всегда имеет большое значение. Не стесняйтесь использовать любое из бесплатно доступных приложений (например, «Sensorstream IMU+GPS» для Android) и используйте фрагмент кода Python, аналогичный приведенному ниже, для получения данных. |
 Этот исходный код взят из примера, доступного на веб-сайте приложения «Sensorstream IMU+GPS». Продолжайте и создайте для себя приложение для построения графиков в реальном времени. Изображение справа было найдено на «http://www.bbiphones.com/».
Этот исходный код взят из примера, доступного на веб-сайте приложения «Sensorstream IMU+GPS». Продолжайте и создайте для себя приложение для построения графиков в реальном времени. Изображение справа было найдено на «http://www.bbiphones.com/». # Получить данные и распечатать их
импорт сокета, трассировка
хост = ''
порт = 5555
s = socket.socket(socket.AF_INET, socket.SOCK_DGRAM)
s.setsockopt(сокет.SOL_SOCKET, сокет.SO_REUSEADDR, 1)
s.setsockopt(сокет.SOL_SOCKET, сокет.SO_BROADCAST, 1)
s.bind((хост, порт))
пока 1:
пытаться:
сообщение, адрес = s.recvfrom(8192)
распечатать сообщение
кроме (KeyboardInterrupt, SystemExit):
поднимать
кроме:
traceback.print_exc()
Что такое инерциальные датчики?
Инерционные датчики используются для преобразования силы инерции в измеримые электрические сигналы для измерения ускорения, наклона и вибрации объекта. Технология микрообработки позволила производить инерциальные датчики MEMS (микроэлектромеханическая система) с использованием сенсорных элементов из монокристаллического кремния.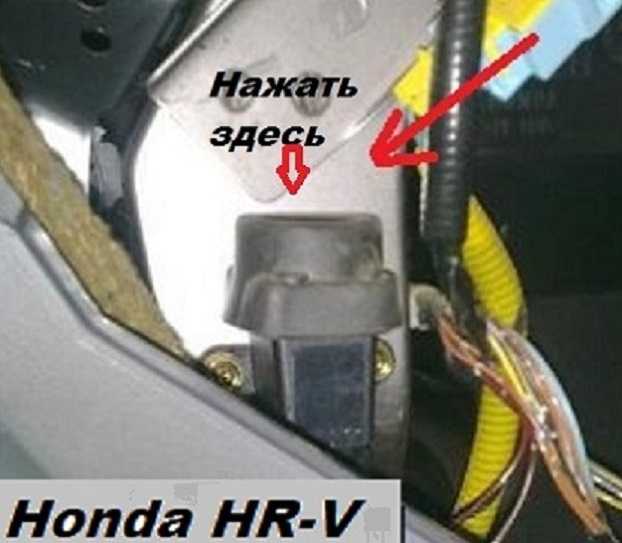 Эти датчики микронного размера отвечают всем основным требованиям проектирования систем, таким как низкая стоимость, высокая производительность, высокая точность и малый форм-фактор. Основываясь на тех же принципах, что и макроскопические инерциальные датчики, инерциальные датчики MEMS могут обнаруживать малейшие изменения в положении, ориентации и ускорении объекта длиной в несколько метров, используя сенсорный блок размером всего в несколько микрометров.
Эти датчики микронного размера отвечают всем основным требованиям проектирования систем, таким как низкая стоимость, высокая производительность, высокая точность и малый форм-фактор. Основываясь на тех же принципах, что и макроскопические инерциальные датчики, инерциальные датчики MEMS могут обнаруживать малейшие изменения в положении, ориентации и ускорении объекта длиной в несколько метров, используя сенсорный блок размером всего в несколько микрометров.
В основном существует два типа инерциальных датчиков MEMS: акселерометры, измеряющие линейное ускорение по одной или нескольким осям, и гироскопы, измеряющие угловое движение. Эти датчики изготавливаются для использования в конкретных приложениях, поскольку для каждого приложения требуются инерциальные датчики с различной полосой пропускания, разрешением и динамическим диапазоном. Например, инерционный датчик, используемый в системе выпуска подушек безопасности автомобиля, должен иметь полосу пропускания до 0,5 кГц, разрешение около 500 мГс и динамический диапазон около +/-100 Гс. В то время как инерционный датчик, используемый в приборе для измерения космической микрогравитации, может иметь полосу пропускания 0–10 Гц, но должен иметь разрешение с точностью до < 1 мкГс и динамический диапазон менее +/- 1 Гс.
В то время как инерционный датчик, используемый в приборе для измерения космической микрогравитации, может иметь полосу пропускания 0–10 Гц, но должен иметь разрешение с точностью до < 1 мкГс и динамический диапазон менее +/- 1 Гс.
Инерциальные датчики обычно являются частью более крупной системы управления в любом приложении или устройстве. Простая информация об ускорении или угловом движении объекта бесполезна. Информация, полученная от инерциального датчика, всегда используется для управления движением самого устройства или используется для активации исполнительного механизма, например, для открытия подушки безопасности автомобиля.
Применение инерциальных датчиков
Было время, когда создание инерциальных датчиков было дорогостоящим делом, и их использование ограничивалось военными и аэрокосмическими приложениями. Разработка инерциальных датчиков MEMS открыла возможности и использование инерциальных датчиков в автомобильной и различной бытовой электронике.
В автомобильной промышленности акселерометр используется для контроля срабатывания подушки безопасности, контроля тяги, ремня безопасности, активной подвески, антиблокировочной тормозной системы (ABS) и контроля вибрации автомобиля. В то время как гироскоп используется для защиты от опрокидывания, автоматических поворотников, усилителя руля и для управления динамикой автомобиля.
В потребительском сегменте инерциальные датчики используются в различных приложениях, таких как стабилизация платформы в видеокамерах, гарнитурах виртуальной реальности, указывающих устройствах для компьютеров, интеллектуальных игрушках и игровых клавиатурах. Все современные смартфоны и планшеты оснащены инерционными датчиками для определения поворота экрана, игр и приложений дополненной реальности.
Инерциальные датчики также используются для контроля положения и ориентации роботов-манипуляторов и беспилотных роботизированных транспортных средств. В медицинских приложениях эти датчики используются для наблюдения за пациентами с особыми заболеваниями, например, для наблюдения за пациентами с болезнью Паркинсона. Высококачественные инерциальные датчики используются в военных и аэрокосмических приложениях, таких как интеллектуальные боеприпасы, управление динамикой самолета, обнаружение столкновений, система катапультирования сиденья в самолетах и измерение микрогравитации.
Высококачественные инерциальные датчики используются в военных и аэрокосмических приложениях, таких как интеллектуальные боеприпасы, управление динамикой самолета, обнаружение столкновений, система катапультирования сиденья в самолетах и измерение микрогравитации.
Акселерометры
Акселерометры состоят из механического чувствительного элемента, который может измерять ускорение по одной или нескольким осям. Чувствительный элемент состоит из контрольной массы, прикрепленной к системе отсчета механической подвесной системой. В датчиках MEMS пробная масса представляет собой чрезвычайно малую сейсмическую массу, а система подвески состоит из кремниевых пружин.
Микрофотография квадранта акселерометра, вид сверху
Контрольная масса отклоняется от своего стабильного положения всякий раз, когда датчик испытывает некоторую инерционную силу из-за ускорения. Второй закон Ньютона управляет этим. Отклонение контрольной массы от ускорения выражается уравнением Лапласа следующим образом:
x/a = 1/(s 2 + b/m + s*k/m)
Где,
x – перемещение контрольной массы,
a – ускорение, 15 9 с – оператор Лапласа,
b – коэффициент демпфирования,
m – масса пробной массы,
k – механическая жесткость подвесной системы.
Следующее уравнение дает резонансную частоту датчика:
f n = √(k/m)
Следующее уравнение дает добротность:
Q = √(m*k)/b
Следующее уравнение дает чувствительность датчика (в разомкнутом контуре):
S = m/k
Таким образом, вы можете видеть, что при увеличении чувствительности резонансная частота уменьшается, и наоборот. Этот компромисс можно отрегулировать с помощью системы с обратной связью. Коэффициент демпфирования определяет максимальную полосу пропускания акселерометра. В акселерометрах МЭМС коэффициент демпфирования часто является переменным и увеличивается с перемещением контрольной массы.
Во всех типах микромеханических акселерометров смещение контрольной массы измеряется интерфейсами измерения положения, как и при емкостном измерении, к контрольной массе прикреплены подвижные пластины, которые перемещаются вдоль контрольной массы между неподвижными емкостными электродами. Существует много типов сенсорных механизмов, которые используются в конструкции акселерометров. Некоторые из распространенных методов измерения включают пьезорезистивный, емкостной, пьезоэлектрический, оптический и туннельный ток.
Существует много типов сенсорных механизмов, которые используются в конструкции акселерометров. Некоторые из распространенных методов измерения включают пьезорезистивный, емкостной, пьезоэлектрический, оптический и туннельный ток.
Акселерометр может иметь разомкнутую или замкнутую систему. Если электрические сигналы от интерфейса измерения положения используются непосредственно в качестве выходных сигналов, это называется акселерометром без обратной связи. Большинство датчиков акселерометра являются разомкнутыми, поскольку их легко построить. Однако акселерометры без обратной связи должны работать с высокими допусками из-за переменной жесткости пружины, переменного коэффициента демпфирования и нелинейных перемещений контрольной массы.
В акселерометре с обратной связью имеется система обратной связи, которая прикладывает силу обратной связи к контрольной массе, пропорциональную ее ускорению, возвращая контрольную массу в исходное положение. Таким образом, нелинейные факторы компенсируются, чувствительность становится зависимой от управления с обратной связью, а динамикой датчика можно точно управлять с помощью контроллера электрического сигнала. Контрольная масса может быть возвращена в исходное положение с помощью электростатического, теплового или магнитного срабатывания. Сигнал обратной связи, управляющий силой обратной связи, может быть аналоговым или цифровым. Все это усложняет конструкцию датчика.
Контрольная масса может быть возвращена в исходное положение с помощью электростатического, теплового или магнитного срабатывания. Сигнал обратной связи, управляющий силой обратной связи, может быть аналоговым или цифровым. Все это усложняет конструкцию датчика.
Методы измерения ускорения
Акселерометры могут измерять ускорение по определенной оси разными способами. Некоторые методы определения ускорения описаны ниже:
- Пьезорезистивные акселерометры – В акселерометрах этого типа контрольная масса крепится к пьезорезистору. Резистор подключен к считывающей электронной схеме. При смещении пробной массы сопротивление пьезорезистора изменяется пропорционально приложенной силе. Эти типы акселерометров являются первыми, которые начали массовое производство. Самым большим недостатком акселерометров этого типа является их термическая стабильность. Пейзосопротивление может существенно измениться из-за тепловых шумов и привести к ложным срабатываниям.

Пример, показывающий принцип работы пьезорезистивных акселерометров
- Емкостные акселерометры – В емкостных акселерометрах к контрольной массе присоединяются емкостные чувствительные пальцы, которые перемещаются вдоль заданной оси со смещением контрольной массы. Каждая подвижная пластина помещается между двумя электродами. При наличии ускорения контрольная масса смещается в сторону, противоположную направлению движения, а переменная пластина перемещается вдоль контрольной массы. Изменение положения переменной пластины вдоль оси вызывает изменение ее расстояния с пластинами неподвижного электрода и вызывает симметричное изменение емкости. Затем это измеряется как электрическая мощность с помощью считывающей электроники. Емкостные акселерометры термически стабильны, но подвержены электромагнитным помехам, где они могут давать ложные результаты из-за паразитной емкости.
Пример, показывающий принцип работы емкостных акселерометров
- Пьезоэлектрические акселерометры – В большинстве макроскопических акселерометров используются пьезоэлектрические материалы для обнаружения движения контрольной массы.
 Многие микромашинные акселерометры также используют тот же принцип. Эти акселерометры имеют большую полосу пропускания, но имеют чрезвычайно низкую резонансную частоту из-за токов утечки. Пьезоэлектрический материал генерирует электрические сигналы, пропорциональные смещению контрольной массы по заданной оси.
Многие микромашинные акселерометры также используют тот же принцип. Эти акселерометры имеют большую полосу пропускания, но имеют чрезвычайно низкую резонансную частоту из-за токов утечки. Пьезоэлектрический материал генерирует электрические сигналы, пропорциональные смещению контрольной массы по заданной оси.Пример, показывающий принцип работы пьезоэлектрических акселерометров
- Туннельные акселерометры – Эти типы акселерометров используют туннельный ток для измерения смещения контрольной массы. Туннельный ток между острым наконечником и электродом изменяется экспоненциально в зависимости от расстояния между наконечником и электродом. Следующее уравнение дает туннельный ток:
I = I 0 * exp(-ᵦ√(φz))
Пример, показывающий принцип работы туннельных акселерометров
Где
I — туннельный ток между наконечником и электродом,
I 0 — ток масштабирования в зависимости от используемого материала,
ᵦ — коэффициент преобразования,
φ — высота туннельного барьера в эВ,
и z — наконечник-электрод расстояние.
- Резонансные акселерометры – В резонансных акселерометрах контрольная масса прикреплена к резонатору. Перемещение пробной массы изменяет деформацию резонатора и, следовательно, его резонансную частоту. Изменение частоты преобразуется в цифровые электрические сигналы с помощью схемы частотомера. Эти акселерометры совершенно невосприимчивы к шуму и очень надежны, поскольку изменения частоты могут быть напрямую преобразованы в цифровой формат.
Пример, показывающий принцип работы резонансных акселерометров
- Оптические акселерометры – В этих акселерометрах используются оптические волокна и волноводы, прикрепленные к контрольной массе. Однако волоконно-оптические акселерометры не подходят для серийного производства, так как волокно необходимо устанавливать вручную рядом с контрольной массой в узле датчика. Другой тип оптических акселерометров использует светодиодные и контактные фотодетекторы для измерения смещения контрольной массы.
 Преимущество оптических акселерометров в том, что они свободны от электростатических и электромагнитных помех. Но поскольку они обычно включают сложную схему сборки и считывания, они не пользуются большой популярностью.
Преимущество оптических акселерометров в том, что они свободны от электростатических и электромагнитных помех. Но поскольку они обычно включают сложную схему сборки и считывания, они не пользуются большой популярностью.Пример, демонстрирующий принцип работы оптических акселерометров
Гироскопы
Гироскоп измеряет вращение объекта. В гироскопах MEMS используется принцип силы Кориолиса. Когда масса движется во вращающейся системе, на нее действует сила, перпендикулярная оси вращения и направлению движения. Это называется силой Кориолиса. Гироскоп MEMS состоит из механической конструкции, которая приводится в резонанс благодаря силе Кориолиса и возбуждает вторичные колебания в той же самой или вторичной структуре. Вторичное колебание пропорционально вращению конструкции вокруг заданной оси. Сила Кориолиса имеет относительно небольшую амплитуду по сравнению с ее движущей силой. Вот почему все гироскопы MEMS используют вибрирующую структуру, в которой используется явление силы Кориолиса.
Пример, показывающий принцип работы МЭМС-гироскопа
Вибрирующая конструкция состоит из пробной массы, соединенной с внутренней рамой парой пружин. Внутренняя рама соединена с внешней рамой другим набором ортогональных пружин. Между внутренней рамой и внешней рамой расположены емкостные сенсорные пальцы, прикрепленные вдоль ортогональных пружин. Сила Кориолиса пропорциональна как угловой скорости вращающегося объекта, так и скорости объекта по направлению к оси вращения или от нее. Контрольная масса непрерывно приводится в движение синусоидально вдоль внутренних пружин. Когда система испытывает вращение, резонирующая пробная масса испытывает силу Кориолиса вдоль ортогональных пружин, прикрепленных между внутренней и внешней рамой. Это изменяет расстояние между емкостными сенсорными пальцами и, таким образом, выдает электрический сигнал, пропорциональный силе Кориолиса. Поскольку сила Кориолиса пропорциональна угловой скорости, связанный с ней электрический сигнал также пропорционален угловой скорости системы.
