
CoDeSys, ZenOn, микроконтроллеры, электротехника | Festo
PLC122, Системы автоматизации на базе контроллеров Festo и текстовых панелей оператора
Данный курс позволит участникам научиться работать с диагностическими сообщениями, полученными с помощью текстовых панелей оператора, Вы научитесь конфигурировать панели, устанавливать связь с контроллером, составлять и загружать программы, обнаруживать и устранять ошибки.
Целевая аудитория: программисты контроллеров FESTO, работники, занятые в разработке, монтаже и отладке автоматизированных производственных систем на базе контроллеров FESTO и текстовых панелей оператора, которые имеют опыт работы или обладают знаниями в объеме курса PLC111
Основные темы курса
- Обзор текстовых панелей Festo. Настройка связи с контроллерами, конфигурирование связи.
- Основные принципы программирования текстовых панелей. Создание экранов, тегов, полей ввода-вывода, аварийных сообщений, программирование функциональных кнопок.
- Загрузка программы в панель.
- Основные логические команды: установка-сброс бита, переходы, переключение языков, перезагрузка контроллера, печать экрана, увеличение – уменьшение значения тега, обновление экрана и др.
- Конфигурирование сообщений: тексты сообщений, теги сообщений.
- Практика: создание проекта автоматизации для контроллера и панели оператора FED50 на базе учебного стенда: «Процессотехника».
Участники:
- смогут разрабатывать программы для текстовых панелей;
- научатся устанавливать связь с контроллером;
- смогут осуществлять поиск ошибок в программах, написанных другими;
- научатся самостоятельно разрабатывать программы для текстовых панелей.

Начальная подготовка: курс PLC111, навыки работы с Windows.
Следующие уровни: PLC211, AUT121.
Разработка АСУ ТП в Codesys
Данный практический видеокурс позволит каждому самостоятельно даже с нулевым порогом знаний быстро освоить программирование контроллеров Овен в среде разработке Codesys. В курсе мы с нуля создадим полноценную систему управления для реального производственного объекта. В качестве главного устройства в проекте данного видеокурса взят контроллер фирмы ОВЕН ПЛК-110-60-М. Но можно использовать и любой другой контроллер, программируемый в среде Codesys v2.3. Более того для обучения сам контроллер приобретать вовсе необязательно. Большую часть времени тестировать работу программы мы будем в симуляторе, который имеется в Codesys.
Основополагающая часть курса посвящена составлению программной логики для программируемого логического контроллера, поддерживающего среду исполнения Codesys. По мере обучения мы с Вами будем реализовывать программные коды на 5-ти языках программирования, представленных в Codesys: LD, FBD, CFC, ST и SFC. Детально рассмотрим каждый из них. Познакомимся со всеми типами данных и видами программных блоков в Codesys. Научимся оптимально подбирать тип программных реализаций для их много повторного использования в проекте.
Детально рассмотрим каждый из них. Познакомимся со всеми типами данных и видами программных блоков в Codesys. Научимся оптимально подбирать тип программных реализаций для их много повторного использования в проекте.
Помимо написания программной логики в видеокурсе мы детально рассматриваем аппаратную периферию контроллера, интерфейсы связи, протоколы передачи данных, конфигурирацию входов и выходов. Так же подробно останавливаемся на способах подключения к контроллеру дополнительных модулей. В проекте к контроллеру мы подключаем модуль аналоговых входов МВА8 и модуль аналоговых выходов МВУ8. Подключаем их через канал RS-485 по протоколу Modbus. Данный способ является универсальный, его можно использовать для подключения любых типов устройств, поддерживающих протокол Modbus.
Наша система управления также будет включать HMI-интерфейс. Его мы реализуем с использованием панели оператора. В итоге проект панели будет связан с контроллером и управляться его программой. Панель оператора у нас одновременно будет служить пультом управления и на её экране будет выводится ход работы управляемого объекта.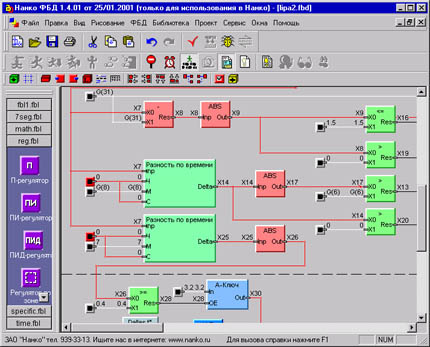 Всё это мы реализуем в курсе от начало и до конца, не упуская ни одной детали. В дополнение ко всему в курсе мы рассматриваем схемы подключения к контроллеру и к модулям ввода-вывода датчиков и исполнительных механизмов, а также разбираем схему сбора щита управления.
Всё это мы реализуем в курсе от начало и до конца, не упуская ни одной детали. В дополнение ко всему в курсе мы рассматриваем схемы подключения к контроллеру и к модулям ввода-вывода датчиков и исполнительных механизмов, а также разбираем схему сбора щита управления.
Пройдя данный курс, Вы не просто научитесь программировать контроллеры, здесь Вы получите опыт разработчика АСУ ТП и уже самостоятельно на оборудовании Овен сможете реализовывать собственные проекты под свои конкретные задачи. Качество видеокурса гарантировано, материал преподносится простым и понятным языком, Вам остается просто смотреть и повторять у себя на компьютере.
Контроллеры пиксель программирование. Ооо “производственная кампания “ника”. Основной сферой применения пикселей данного типа является
Промышленный контроллер Pixel — продукт компании Segnetics из серии 12хх — 25хх, достаточно широко используется на практике. Традиционно применяются эти управления системами вентиляции и кондиционирования воздуха. Сам по себе контроллер Pixel – это чисто электронный прибор. Поэтому устройство функционирует только в том случае, когда загружена управляющая программа контроллера Pixel – ядро и системный проект вентиляции или иного оборудования.
Сам по себе контроллер Pixel – это чисто электронный прибор. Поэтому устройство функционирует только в том случае, когда загружена управляющая программа контроллера Pixel – ядро и системный проект вентиляции или иного оборудования.
Нередко устройства продаются запрограммированные по умолчанию под конкретное оборудование. Но на практике приходится иметь дело с разной конфигурацией технических систем.
Устройство управления промышленными системами вентиляции и кондиционирования воздуха, а также прочего оборудования, полностью в автоматическом режиме
Поэтому практика программирования Pixel остаётся актуальной всегда. Исходя из , программирование «Пикселей» следует условно разделить на два этапа:
- Системный этап (создание проекта и загрузка).
- Рабочий этап (программирование параметров и запуск).
Системное программирование Pixel
Системный этап программирования предполагает создание рабочего проекта для Pixel с последующей загрузкой созданного кода в модуль постоянной памяти контроллера.
Следует уточнить: загружаемый проект является промежуточным программным кодом, который в процессе работы контроллера обрабатывается основной программой – ядром Pixel.
Создание системной программы к «Пикселю» осуществляется через специальный сервисный софт, именуемый SMLogix. Софт поддерживает программирование языком FBD (Function Block Diagram) под графическим интерфейсом.
Интерфейс («чистый») программного комплекса, предназначенного для разработки системного программного обеспечения под управление различным промышленно-хозяйственным оборудованием
Система программирования SMLogix для контроллеров Pixel разработана под Windows и может устанавливаться на персональных компьютерах без ограничений.
Нужно отметить: комплекс SMLogix – это достаточно сложное сервисное ПО. Софт поддерживает разработку программных проектов на уровне методики построения FBD-схем с участием макросов. Процесс программирования проходит в следующей последовательности:
- Определяются конкретные цели проекта.
- Составляется бумажная схема проекта.
- На основе бумажной зарисовки делается FBD-схема.
- Выполняется компиляция проекта.
- Тестирование и отладка.
Вопреки сложности сервисного ПО, при желании можно научиться программировать на SMLogix «с нуля». Но для облегчения познания всех тонкостей программирования FBD, рекомендуется практиковаться на готовых проектах для контроллера Pixel.
Таковые проекты имеются на официальном ресурсе производителя . Там же доступен для скачивания программный сервисный комплекс. Желательно иметь под руками «свободный» (тестовый) контроллер Pixel.
Примеры разработки блоков FBD проекта
Допустим, есть задача реализовать функцию дискретного регулятора для управления ТЭН. При помощи программного обеспечения для Pixel, реализуется эта функция созданием блок-схемы на рабочем поле программы SMLogix.
Так выглядит кусок системной программы, реализующей функцию дискретного регулятора температуры. Нагреватели могут быть установлены, к примеру, на оборудовании кондиционирования воздуха
После компиляции и загрузки в контроллер, созданный код действует следующим образом:
- Выполняется обработка заданной уставки.
- Вычисляются точки граничной температуры.
- Включается или отключается ТЭН.
Характерной особенностью здесь видится плавная динамика работы схемы регулятора. На практике такая работа отмечается чётким срабатыванием реле. Дребезг контактов полностью исключается.
Вот, примерно так создаётся полноценная управляющая программа контроллера и кондиционирования воздуха, а также иных систем.
Для каждого модуля программируется управляющая или контрольная функция. Всё объединяется в единую функциональную схему и загружается в память контроллера.
Загрузка готовой скомпилированной программы осуществляется одной из двух опций интерфейса. Первая позволяет загрузить и запустить, вторая поддерживает отладку
Загрузка проекта непосредственно в память контроллера Pixel выполняется через кнопки рабочей панели SMLogix. Существуют две кнопки для этих целей. Одна кнопка активирует функцию для загрузки с последующим стартом.
Вторая кнопка активирует функцию для загрузки с переходом в режим отладки. Перед загрузкой контроллер необходимо подключить и убедиться в наличии связи через опцию «Диагностика и Поиск».
Перед загрузкой контроллер необходимо подключить и убедиться в наличии связи через опцию «Диагностика и Поиск».
Кстати будет замечено: через опцию «Диагностика и Поиск» осуществляется при необходимости обновление кода ядра процессора.
Таким выглядит окно программы «SMLogix», через которое выполняется программирование — обновление ядра контроллера Pixel
Это совершенно отдельная операция, никак не связанная непосредственно с загрузкой проекта. К тому же файлы ядра отличаются по расширению от файлов проекта.
Рабочий этап программирования Pixel
«Пиксель» на рабочем этапе включает действия по настройке загруженного программного проекта под действующую систему вентиляции и кондиционирования воздуха, либо иного оборудования.
Процесс заключается в установке необходимых эксплуатационных параметров, к примеру:
- температуры воздуха в помещении,
- давления воздуха на выходе из приточной системы,
- ограничения по нагреву обратного теплоносителя,
- сезона года,
- времени для таймера.

Общий список настроек, в зависимости от конфигурации оборудования, может составлять более десятка пунктов. Кроме того, существуют настройки системного характера, которыми устанавливается текущая дата, время, параметры скорости обмена данными и т.д.
Настройка параметров — неотъемлемая часть работы с электроникой подобного рода. Правильно выбранные уставки — залог бесперебойной работы оборудования
Рабочим этапом программирования поддерживается функция копирования и загрузки проекта. То есть имеется возможность, в буквальном смысле одним нажатием кнопки скопировать рабочую программу на съёмный модуль памяти.
Затем копия переносится на «чистый» контроллер и так же одним нажатием кнопки загружается. Подобное решение кардинально упрощает массовую установку приборов. Правда, функция копирования поддерживается только на моделях Pixel 25хх.
Практический видео пример создания FBD Пиксель
Демонстрационный видео-пример программирования промышленного контроллера Pixel — своего рода инструкция создания программного кода с последующим внедрением в реальное устройство:
В данной статье рассмотрим, каким образом из пикселей можно создать видеоэкран или бегущую строку
Пиксели имеют внешний вид:
Размер пикселей представлен на чертеже ниже
Пиксели поставляются соединенными в гирлянды по 50штук.
В каждом RGB LED модуле или пикселе, находится контроллер управления.
Технические характеристики пикселей:
Тип диода | |
Количество цветов | 32 к (LPD6803) или 16 млн. (WS2801) |
Тип крепления | Через отверстие Ø12мм, толщина мат. 2-3мм |
Степень защиты | |
Габаритные размеры | 38мм х 12,5мм х 12,5мм |
Максимальный ток через все три цвета | 60мА (0. |
Протокол управления | Последовательный по двум проводам |
 3Вт)
3Вт)Таблица степеней защиты
Степень защиты пикселей IP67 означает, что от пыли они защищены полностью, также выдерживают временное погружение в воду до 1м.
Основные достоинства данных пикселей:1) Небольшая стоимость
2) Высокая яркость
3) Высокая степень защиты IP65 (не боится не пыли не воды может находится на улице ничем не закрытый)
4) Простота монтажа (любого человека за 10 минут можно обучить монтажу пикселей, следовательно, вам не нужно нанимать дорогостоящих специалистов).
5) Возможность демонтажа и повторного применения
6) При работе пиксель не греется
1) Светодиодные полноцветные динамические табло и бегущие строки любой формы, например, медицинский крест, сердце.
2) Динамические логотипы любой геометрии.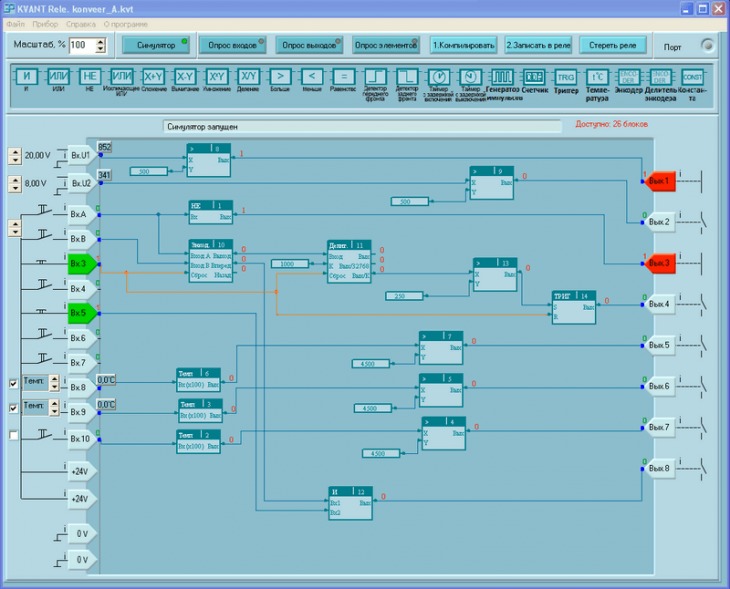
3) Использование пикселей, как динамического источника света для воплощения дизайнерских идей.
4) Поскольку пиксель имеет простой способ крепления в отверстие диаметром 12 мм, это дает возможность устанавливать его на любые криволинейные поверхности (шар, колонны).
Для понимания, какое количество пикселей вам необходимо, и через какое расстояние их расположить нужно, учитывать следующее:
1) С какого расстояния должно быть видно изображение.
2) Какой размер изображения в пикселях вы хотите отобразить.
Расстояние между пикселями определяется исходя из следующей таблицы.
Основное правил для выбора шага пикселя:
15 мм комфортное расстояние просмотра более 17 метров,
25 мм комфортное расстояние просмотра более 30 метров,
50 мм комфортное расстояние просмотра более 60 метров.
Зная размер изображения в пикселях, который вы хотите отобразить, можно посчитать количество необходимых пикселей, например, если размер изображения 32см х 32см с шагом 10мм, то вам необходимо 1024 пикселя.
Из нашего опыта, шаг пикселей 20-30мм комфортен для восприятия.
Иногда, перед пикселями, на небольшом расстоянии устанавливается дополнительный светорассеивающий элемент (лист матового акрила) для уменьшения эффекта «точек».
Также, важно хорошо продумать контент который вы планируете отображать на табло из управляемых пикселей.
ПО для контроллера, который управляет пикселями, позволяет вставлять в проект уже готовую анимацию AVI, GIF, видео в различных форматах и Flash-анимацию, созданную в других редакторах. Что дает возможность создания анимации любой сложности.
Электрическое подключение LED пикселей.Пиксели подключаются последовательно c с помощью 4-проводного шлейфа. Где два провода цифрового последовательного интерфейса DAT и CLK и два провода питания +5В и минус. Пиксели поставляются в виде гирлянд по 50шт с разъемами на концах.
Максимальный шаг установки 70мм без удлинения, но его можно увеличить. Для этого нужно разрезать стандартный кабель и удлинить его на необходимое расстояние (до 1. 5 метров).
5 метров).
Ниже приведена схема подключения пикселей к контроллеру и блоку питания.
Требования по подключению, в случае автономной системы.
1) Пиксели подключаются в виде непрерывной гирлянды, длиною до 2048 штук.
2) Если количество более 2048 штук, то используется контроллер с несколькими выходами, где на каждый цифровой выход можно подсоединить по 2048 пикселов.
3) Питание 5В необходимо подключать через каждые 40-50 пикселей т.е в начале и конце гирлянды.
4) Если последний отрезок пикселей менее 25шт, то питание на конец гирлянды можно не подводить.
5) Если в проекте используется несколько блоков питания, то в месте перехода гирлянды на другой блок питания шина 5В разрывается, как показано на рисунке ниже
6) Оставшиеся провода питания в конце последней гирлянды нужно заизолировать друг от друга.
7) Если изделия планируется эксплуатировать на улице, то лучше гирлянды соединять между собой не через разъемы, а при помощи пайки и изолировать их термоусадочной трубкой
8) Будьте внимательны, пиксель имеет вход и выход, на вход поступают сигналы с контроллера, а с выхода сигналы уходят на входы соседних пикселей.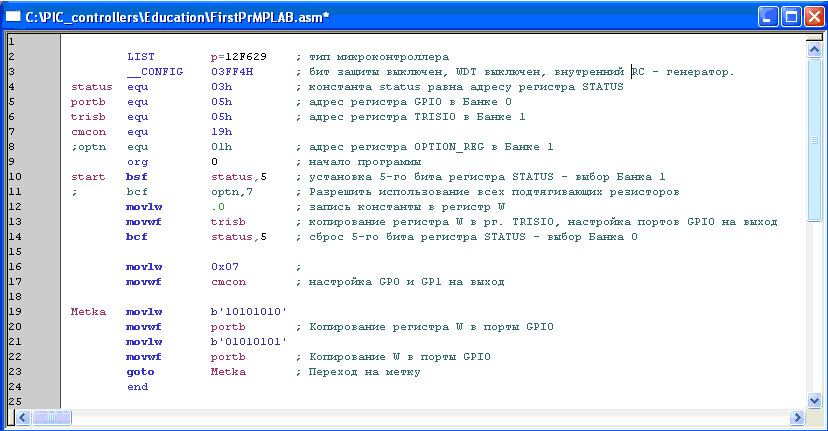
9) Вход первого пикселя подключается к контроллеру только проводами GND, DAT, CLK.
Назначение проводов пикселя.
Для разных моделей пикселей цвет и назначение проводов может отличаться. Цвет шлейфа в разных партиях может также может отличаться.
Выбор мощности блока питания
Расчет необходимой мощности блоков питания производится из расчета количество пикселей N умножить на максимальную мощность пикселя 0,6Вт и умножить на коэффициент 1,2
Например, в проекте используются 1024 пикселя, умножаем на максимальную мощность пикселя 1024 х 0,6 = 614.4 Вт и множим полученную мощность на коэффициент 1,2, получим 737.28Вт. Источник питания с такой мощностью или большей на напряжение 5В нам нужно использовать или можно использовать несколько источников питания меньшей мощности, если берем три источника питания то мощность каждого должна быть не менее 738/3=246Bт.
Выбор контроллера
Из выше изложенного, теперь мы можем определить, какое количество пикселей будет участвовать в проекте. Выбор конкретной модели контроллера зависит от общего количество пикселей в проекте. Если до 2000 пикселей, то достаточно контроллера CS1. Он имеет один порт для подключения пикселей. Если больше 2000, но меньше 4000, то нужно взять контроллер CS2, который имеет два порта, каждый для управления 1024 пикселами. И т.д.
Выбор конкретной модели контроллера зависит от общего количество пикселей в проекте. Если до 2000 пикселей, то достаточно контроллера CS1. Он имеет один порт для подключения пикселей. Если больше 2000, но меньше 4000, то нужно взять контроллер CS2, который имеет два порта, каждый для управления 1024 пикселами. И т.д.
При использовании много-портовых контроллеров желательно равномерно распределять пиксели по портам.
Например:
В проекте используется 2150 пикселей, применен контроллер CS2, у которого 2 выхода. Тогда на первый порт пойдет 1074 шт, второй – 1074 шт.
Рассматриваемые пиксели их еще называют «палец», устанавливаются в отверстие диаметром 12 мм в любом материале толщиной 2-3 мм. Поверхность может быть как плоской так и криволинейной (дуга, цилиндр, шар и т.д.)
Габаритно-установочные размеры пикселей
1) LED-пиксели монтируются в виде непрерывной гирлянды, с подключением питания через 40-50 шт.
2) Отверстия необходимо стараться размещать в сетке с одинаковым шагом, это упростит создание программы на PC .
Часто задаваемые вопросы (FAQ)
Вопрос 1. Можно на этих пикселях собрать видео экран (медиа фасад)?
Ответ. Смотря что вы подразумеваете под видеоэкраном, вы можете на этих пикселях собрать полноцветное табло на котором можно проигрывать простую анимацию и flash-ролики.
Полноценный видеоэкран с высокой частотой обновления информации и большим разрешением более 240х320 собрать проблематично.
Предлагаемые нами контроллеры позволяют воспроизводить анимационный ролик, заранее записанный в память контроллера. Этот ролик можно сделать в любом видео-редакторе или редакторе Flash-анимации и он может содержать любую графику, в том числе и текст.
Вопрос 2 . Можно ли увеличить стандартное расстояние между пикселями.
Ответ. Да можно в разумных пределах.
Пиксели управляются по цифровому протоколу SPI. Этот протокол не защищен от электромагнитных помех. Увеличение длины между пикселями может привести к полному отказу системы или периодическим «промаргиваниям».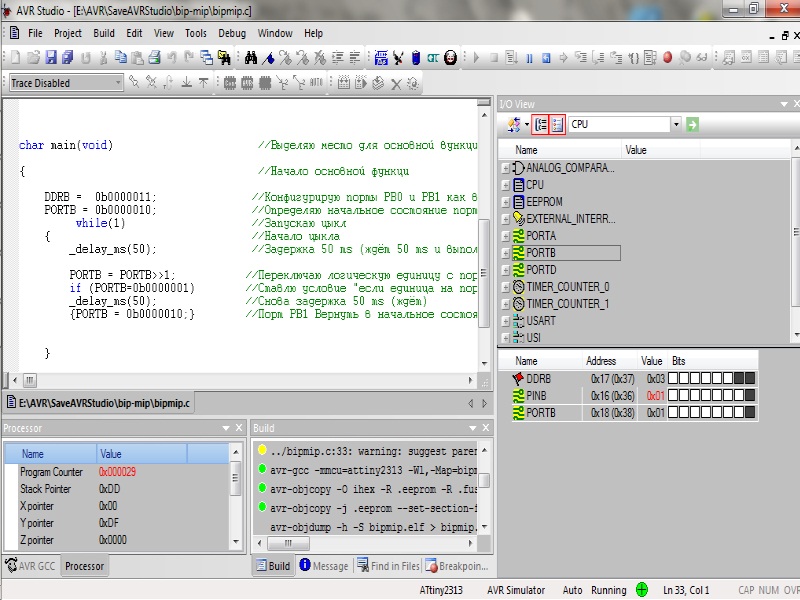
На длинный кабель могут влиять различные факторы:
1) Сопротивление провода
2) Частота сигнала CLK. Чем выше частота CLK, тем меньше удлинение можно выполнить.
3) Электромагнитные помехи. Наличие в непосредственной близости силового кабеля или приемо-передающей антенны может привести к непредсказуемому результату.
Если удлинять необходимо, рекомендуем следующее:
1) Снизить частоту сигнала CLK до минимально возможного значения. Внимание: уменьшение частоты приведет к уменьшению скорости “перерисовки” анимации.
2) Для удлинения применять 8 жильный кабель типа сетевого компьютерного в экранирующей оплетке. Для питания использовать по 3 провода, на сигналы DAT и CLK по одному. Экран соединить с минусом (GND). Причем провода DAT и CLK должны быть «свиты» относительно GND по отдельности.
Данные рекомендации не являются полной гарантией результата.
Утвержден
ООО “Сегнетикс”
SGN.312005.05РЭ
Программируемый логический контроллер
Руководство по эксплуатации
SGN. 312005.05РЭ
312005.05РЭ
Санкт- Петербург
Руководство пользователя
1. Указания по безопасности 3
2. Основные сведения 4
Введение 4 Технические характеристики 5
3. Основные части контроллера и элементы управления 6 Контроллер 6 Дополнительное оборудование 12
4. Установка и подключение 15 Код заказа и маркировка 15 Монтаж 17 Подключение внешних устройств 19
5. Использование по назначению 24 Работа в сети 24 Модуль памяти 45 Дискретные входы 47 Дискретные выходы 53 Аналоговые выходы 58 Аналоговые входы для подключения датчиков температуры 62 Аналоговые входы для измерения тока и напряжения 65 Встроенный источник напряжения для задания уставок. 69 Сервисный режим. 71 Загрузка ядра контроллера 110
6. Приложение 1. Системная страница (СС). 120 Руководство пользователя «Pixel»
1. Указания по безопасности Прочитайте данную инструкцию перед началом работы.
Только квалифицированный персонал может производить установку контроллера «Pixel».
Примечание. Не открывайте контроллер, не производите подключения проводов, если питание контроллера не отключено.
Примечание. После отключения питания на клеммах в течение 10 сек. может оставаться опасный потенциал.
Примечание. Даже если питание контроллера отключено, на других клеммах контроллера может быть опасное напряжение от других внешних источников. Например, к клеммам дискретных выходов может быть подключено коммутируемое напряжение внешней сети.
–  –  –
2. Основные сведения Введение «Pixel» – программируемый логический контроллер, предназначенный для автоматизации инженерных систем зданий и технологических процессов в промышленности. Контроллер может работать как в роли отдельного устройства, так и в вычислительной сети в качестве ведомого (Slave) или ведущего (Master) устройства в сети Modbus или Ethernet (Modbus TCP/IP).
–  –  –
Дисплей В приборе используется графический дисплей с разрешением 122 х 32 точек. Вывод информации на дисплей описывается во встроенной справке программы «SMLogix».
Вывод информации на дисплей описывается во встроенной справке программы «SMLogix».
–  –  –
Использование в проекте «SMLogix»
Выбрать в дереве «Устройства» требуемую кнопку и установить на поляну. При нажатии на кнопку на выходе соответствующего блока появляется единица.
Выбрать в дереве «FBD» блок «Keyboard» и установить его на поляну.
Если такой блок стоит в проекте, то при нажатии на кнопки «ESC», «Right», «Up», «Down», «OK» на его выходе «ASCII» будет возвращаться соответствующий данной кнопке цифровой код.
–  –  –
Верхний «LED0» предназначен для отображения системных аварий, а также доступен пользователю из «SMLogix». Нижний светодиод «LED1»
используется только из проекта «SMLogix».
При возникновении системной аварии «LED0» становится недоступным из проекта «SMLogix» до тех пор, пока авария не будет снята.
Использование в проекте «SMLogix»:
Выбрать значок индикатора в дереве «Устройства» и установить блок на поляну. Единица на входе блока зажигает индикатор.
Единица на входе блока зажигает индикатор.
–  –  –
SW2 – Выбор: внутренний/внешний источник питания датчиков с дискретным выходом.
В случае, если для датчиков с дискретным выходом не требуется гальваническая развязка (например датчики с выходом “сухой контакт”), то для подачи на них питания возможно использование встроенного в контроллер источника питания +24В (клемма 23 контроллера).
В этом случае для создания потенциала “земли” для датчиков (клемма COMM_DIN) должна использоваться системная земля контроллера.
Подсоединение на плате контроллера системной земли к клемме COMM_DIN осуществляется установкой перемычки SW2.
–  –  –
Дополнительное оборудование Можно расширить функциональные возможности контроллера подключением к нему дополнительных компонентов.
–  –  –
Кабель, соединяющий контроллер с хабом или концентратором обжимается с двух сторон разъёмами RJ-45 в соответствии со схемой прямого соединения – “Straight-through”.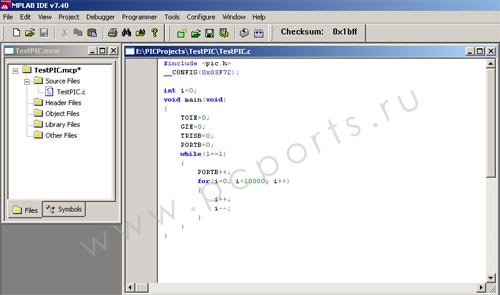
При соединении 2-х контроллеров между собой или при подключении непосредственно к компьютеру кабель обжимается по схеме перекрестного соединения – “Crossover”.
–  –  –
Тип провода – многожильный мягкий, одножильный жесткий.
Использование наконечников для формирования заделываемых концов многожильного провода более предпочтительно, чем пайка.
–  –  –
Внимание! Для того, чтобы снизить до минимума вероятность сбоев в работе контроллера и повысить точность измерений, строго следуйте правилам, изложенным в этом разделе.
Прокладывайте кабели аналоговых сигналов, дискретных сигналов, а также питания отдельно от силовых кабелей.
–  –  –
Для загрузки проекта «SMLogix» и коммуникации в сети ModBus в контроллере «Pixel» используется один и тот же коммуникационный порт СOM1 (RS485). Если контроллер работает “мастером” по порту COM1, то при загрузке проекта, «SMLogix» отключит работу “мастера”, таким образом, позволяя загружать и отлаживать программу. Работа “мастера” в сети возобновится после окончания режима отладки или после выключения питания. Так же запросы мастера можно отключить через Сервисный Режим
Работа “мастера” в сети возобновится после окончания режима отладки или после выключения питания. Так же запросы мастера можно отключить через Сервисный Режим
–  –  –
Соедините «Мастер» со «Слейвами», используя экранированный кабель типа «витая пара». В крайних точках сети установите резисторытерминаторы” 120 Ом. Резисторы номиналом 120 Ом уже установлены в контроллере «Pixel». Для их подключения к схеме необходимо установить соответствующие перемычки.
–  –  –
После изменения сетевых настроек с «Pixel» можно связаться, в том числе и для загрузки в него проектов, только по этому адресу и на заданной скорости. В момент записи новых параметров автоматически настраивается и COM-порт компьютера, к которому подключен контроллер.
Для работы контроллера «Pixel» в качестве «Мастера» требуется создание соответствующей управляющей программы. Подробнее смотрите «Учебник» или «Help» по работе с «SMLogix».
Внимание! Произвольное изменение адреса и скорости обмена контроллера может привести к некоторой путанице. По умолчанию контроллеру «Pixel» присваивается адрес 0 и скорость 115200 бит/с. Используя эти параметры, «SMLogix», как мастер, связывается с контроллером-слейвом. Если необходимо установить, какой адрес и какая скорость заданы в «Pixel» в текущий момент, то для этой цели существует диалоговое окно «Диагностика и поиск» (меню Опции, Тестировать, Диагностика и поиск) и меню Сервисного Режима.
По умолчанию контроллеру «Pixel» присваивается адрес 0 и скорость 115200 бит/с. Используя эти параметры, «SMLogix», как мастер, связывается с контроллером-слейвом. Если необходимо установить, какой адрес и какая скорость заданы в «Pixel» в текущий момент, то для этой цели существует диалоговое окно «Диагностика и поиск» (меню Опции, Тестировать, Диагностика и поиск) и меню Сервисного Режима.
–  –  –
Сетевой модуль «Ethernet» обеспечивает коммуникацию по протоколу Modbus/TCP. Modbus/TCP – это симбиоз стандартного протокола Modbus и протокола TCP/IP как средства передачи данных.
Использование канала связи Ethernet и протокола Modbus/TCP дает следующие преимущества:
Высокая скорость работы;
Совместная работа различных протоколов в одной физической сети – Ethernet. Контроллеры «Pixel» могут работать в одной сети с персональными компьютерами и другими устройствами;
В одной сети могут работать несколько Мастер-устройств.
Сетевой модуль «Ethernet» контроллера «Pixel» позволяет:
–  –  –
Особенности реализации Прежде чем передать данные, протокол TCP/IP устанавливает соединение между двумя контроллерами на время обмена данными.
Когда обмен данными завершен, соединение разрывается. Сетевой модуль «Ethernet» контроллера «Pixel» поддерживает подключение только с одним контроллером в определенный момент времени. То есть к Slave-контроллеру не может одновременно подключиться более одного мастера. Если требуется опросить Slave-контроллер несколькими мастерами, то это необходимо делать последовательно, т.е.
синхронизировать во времени процесс обращения мастеров к одному Slave. Slave-контроллер отслеживает передачу данных от мастера по установленному соединению. В случае отсутствия данных в течение более чем 1,5 сек, Slave-контроллер сам закрывает соединение для возможности опроса со стороны других мастеров.
Предусмотрено создание проекта с наличием в одном проекте одновременно Lonwork и Ethernet-переменных. Проект работает с переменными той сетевой карты, которая в данный момент подключена.
–  –  –
Имеется возможность подключить контроллер, уже работающий на объекте, в сеть Modbus/TCP в качестве Slave. Для этого достаточно подключить сетевой модуль «Ethernet» и через меню СР «Конфигурация»«Сетевой модуль» настроить сетевые параметры.
Для этого достаточно подключить сетевой модуль «Ethernet» и через меню СР «Конфигурация»«Сетевой модуль» настроить сетевые параметры.
–  –  –
Следует помнить, что в протоколе Modbus/TCP устройство имеет два адреса: IP-адрес и стандартный Modbus-адрес. При создании сети необходимо помимо задания слэйв-устройству IP-адреса установить Modbus адрес и проверить соответствие адресов в запросах у мастерустройства сети.
Качество связи по сети можно проконтролировать, установив на поляну SMLogix блок диагностики DEVICE(Link).
На входах блока DEVICE(Link) «CNum» и «PNum» нужно установить номер протокола подключения, которое необходимо контролировать.
«NetPort» – номер 3.
–  –  –
Имеется возможность диагностики связи с конкретным слэйвом из прикладного проекта (программы) «SMLogix». Для этого необходимо воспользоваться блоком Slave(Link), расположенным во вкладке «NetPort» внутри карты памяти конкретного устройства (Панель «Устройства» проекта «SMLogix», вкладка «NetPort», карта памяти Slave).
–  –  –
Возможные ошибки и трудности Внимание! IP-адреса опрашиваемых Slave-устройств в проекте мастера можно изменить, только перегрузив проект мастера!
Поэтому о назначении IP-адресов устройствам Slave надо заранее договориться с администратором сети. В противном случае может потребоваться перешивать проект мастера для замены опрашиваемых IP-адресов. Для перешивки проекта можно воспользоваться Модулем Памяти (МП) (см. Сервисы МП).
Внимание! Контроллеру «Pixel» с сетевым модулем «Ethernet»
присваивается статический IP-адрес (из проекта “SMLogix”) и индивидуальный физический MAC-адрес (назначается производителем сетевого модуля). Для передачи пакетов в сети TCP/IP устройства используют таблицу соответствия физических MAC-адресов IP-адресам (Определено протоколом). При замене сетевого модуля «Ethernet» контроллер получит новый MAC–адрес, а IP-адрес останется прежним согласно проекту. Для возобновления связи с контроллером необходимо исправить таблицу соответствия MAC-адресов IP-адресам сети TCP/IP.
LON Общее описание Сетевой модуль «LON» позволяет подключить контроллер «Pixel» к сети LonWorks. Разработанная корпорацией «Echelon», технология LonWorks используется для систем автоматизации зданий, построения распределенных сетей управления на транспорте и технологических процессов промышленных предприятий.
–  –  –
Аппаратной основой узла сети LonWorks является Neuron Chip. Он управляет всеми сетевыми функциями, а также решает определенные прикладные задачи.
–  –  –
На корпусе сетевого модуля «LON» расположены два светодиода и кнопка SERVICE, нажатие которой вызывает посылку в сеть сообщения, содержащего уникальный 48 – битный идентификатор Neuron Chip (Neuron ID). Эта информация используется для конфигурирования и управления узла.
ACT – индикация приема/передачи пакетов в сети SERVICE – индикация Сервиса.
Подключенный к Сервисному выводу (Service Pin) светодиод отображает состояние сетевого модуля:
–  –  –
Событие сети – «Wink» выводиться в младшем байте переменной nviTime. SW значением 1 на время не менее 2с В меню сервисного режима можно посмотреть идентификатор Neuron ID и состояние State контроллера. Для этого необходимо воспользоваться меню «Конфигурация»«Сетевая карта».
SW значением 1 на время не менее 2с В меню сервисного режима можно посмотреть идентификатор Neuron ID и состояние State контроллера. Для этого необходимо воспользоваться меню «Конфигурация»«Сетевая карта».
Переменная SndHrtBt – предписывает временной интервал отправки выходных переменных вне зависимости от их изменений. Т.е. если выходная переменная изменяется, то эти изменения отсылаются незамедлительно, а если она не изменяется, то её данные отсылаются с интервалом времени SndHrtBt.
Переменная NVUpdateRate – определяет временной интервал отправки изменившихся переменных.
В случае изменения N переменных общее время выдачи их в сеть составит:
N*NVUpdateRate / количество NVO переменных При NVUpdateRate равным нулю переменные не обновляются.
–  –  –
Возможные ошибки и трудности В Lon-сети контроллер обновляет свои переменные по изменению их значения или с определенным интервалом времени, задаваемым переменной SndHrtBt (тип SNVT_time_sec) Если значение меняется у нескольких переменных одновременно, то обновление переменных происходит дискретно с интервалом времени NVUpdateRate (тип SNVT_time_sec) При большом количестве связей переменных и малом интервале обновления NVUpdateRate на опрос переменных с помощью программы LonBrowser у сетевой карты может не хватить производительности.
Дело в том, что LonBrowser использует для мониторинга переменных периодические прямые сетевые запросы (Net Var Fetch) с сервисом “Запрос-Ответ”. Это значительно увеличивает нагрузку в сети.
Поэтому при включении мониторинга всех переменных сетевой трафик возрастает – иногда даже критически, при большом количестве переменных. Для того, чтобы уменьшить нагрузку сети, необходимо исключить дополнительные запросы.
Для этого следует организовывать мониторинг переменной в Browser”е при помощи связи с этой переменной. В свойствах переменной на закладке Monitor Options установить флажок “Bind this variable to the browser for…”. В этом случае при мониторинге обновление будет происходить именно с обновлением переменной (или с интервалом времени, задаваемым переменной SndHrtBt).
Руководство пользователя«Pixel»
Модуль памяти Для хранения данных проекта, таких как уставки, константы или различные переменные, ведения журналов или графиков, каждый контроллер имеет в распоряжении байт внутренней энергонезависимой памяти EEPROM и слот для подключения внешнего модуля памяти. Внешний Модуль Памяти (МП) представляет собой энергонезависимую память объемом до 256К. Помимо возможности хранения данных проекта, в контроллере «Pixel» предусмотрена функция сохранения и загрузки всего прикладного проекта из Модуля Памяти (МП) без помощи «SMLogix», а также автоматическое ведение системного журнала на МП (см. Журнал).
Внешний Модуль Памяти (МП) представляет собой энергонезависимую память объемом до 256К. Помимо возможности хранения данных проекта, в контроллере «Pixel» предусмотрена функция сохранения и загрузки всего прикладного проекта из Модуля Памяти (МП) без помощи «SMLogix», а также автоматическое ведение системного журнала на МП (см. Журнал).
Установка/извлечение модуля
–  –  –
Запись значений «по умолчанию»
Для работы с энергонезависимой памятью в «SMLogix» предназначены блоки сохранения EEPROM и ARRAY.
–  –  –
Примечание. Для сохранения проекта на модуль памяти потребуется контроллер модели 25хх-хх-х, обладающий функцией записи.
–  –  –
–  –  –
ДАТЧИК ДАТЧИК ДАТЧИК ДАТЧИК ДАТЧИК
–  –  –
Примечание: Приведенный пример подключения датчиков – не единственный. Например, возможно подключение активных датчиков с транзисторами обратной проводимости на выходе (типа NPN). В этом случае к клемме COMM_DIN подключается плюс напряжения питания датчиков, а вывод потенциала “Земли” датчиков не используется.
В этом случае к клемме COMM_DIN подключается плюс напряжения питания датчиков, а вывод потенциала “Земли” датчиков не используется.
–  –  –
Внешние подключения (электрические и монтажные схемы) абсолютно идентичны для обоих вариантов реализаций. Различаются только технические характеристики.
Варианты внешних подключений дискретных выходов к исполнительным устройствам (на примере реализации с механическим реле) представлены ниже:
–  –  –
ВНИМАНИЕ! В случае использования Dout на основе симисторов и подключения их по данному варианту, в качестве источника Vexternal должен быть источник ПЕРЕМЕННОГО напряжения.
–  –  –
ВНИМАНИЕ! В случае использования DOUT на основе симисторов и подключения их по данному варианту, в качестве источника Vexternal должен быть источник ПЕРЕМЕННОГО напряжения.
–  –  –
Аналоговые выходы Аналоговые выходы предназначены для подачи на исполнительное устройство заданного напряжения управления в диапазоне 0 … 10V.
Необходимое значение напряжения задается программно.
–  –  –
Подключение аналоговых выходов к исполнительным устройствам Подключение внешних исполнительных устройств к клеммам аналоговых выходов контроллера «Pixel» производится в соответствии с рисунками.
Вариант 1. Исполнительное устройство имеет однополупериодную схему выпрямления напряжения источника питания.
–  –  –
При подключении необходимо объединение земель источников питания контроллера “Pixel” и исполнительных устройств указанным образом. При отсутствии объединения, из-за разности потенциалов земель работоспособность аналогового выхода не гарантируется.
–  –  –
Вариант 2. Исполнительное устройство имеет двухполупериодную схему выпрямления напряжения источника питания, а входы управления гальванически развязаны от земель источников.
–  –  –
При подключении объединение земель источников питания контроллера “Pixel” и исполнительных устройств между собой не допускается ввиду возможности выхода из строя одного из устройств.
–  –  –
Защита Аналоговые выходы контроллера «Pixel» имеют встроенную схему защиты от перегрузки. Схема защиты функционирует следующим образом: при превышении током нагрузки любого из выходов величины 6mA, формируется сигнал отключения источника питания усилителя.
При этом, в случае возникновения сигнала от схемы защиты, аналоговые выходы переходят в режим самотестирования. Раз в секунду происходит включение аналоговых выходов, и производится тестирование схемы защиты. Если перегрузка устраняется, аналоговые выходы переходят в нормальный режим работы.
В контроллере «Pixel» в исполнении 25хх-хх-х одновременно выдается соответствующий сигнал “Авария”, а информация о ее наличии записывается в журнал. (см. Системные аварии).
При использовании в проекте двух аналоговых выходов необходимо учитывать, что сигнал “Авария” будет сформирован в случае, если ОБЩАЯ нагрузка выходов достигнет 6mA. В какой пропорции при этом будет распределена нагрузка между выходами – значения не имеет.
–  –  –
Внимание!!! Т.к. подключение датчиков производится по двухпроводной схеме, необходимо, для минимизации погрешности, чтобы сопротивление используемых кабелей было много меньше величины сопротивления датчика
–  –  –
Подключение внешнего датчика с выходом по току или по напряжению к клемме соответствующего измерительного входа производится следующим образом:
–  –  –
Встроенный источник напряжения для задания уставок.
В контроллере «Pixel» предусмотрен специальный маломощный источник напряжения. Данный источник используется в том случае, если необходимо в прикладном проекте задавать уставки – некоторые контрольные точки измеряемого параметра, при достижении которых должно происходить то или иное событие – например: включаться вентилятор или ТЭН.
В данном случае измеряемым параметром является величина напряжения. Источник напряжения представляет собой линейный стабилизатор, последовательно с выходом которого подключен резистор сопротивлением 3. 9 kOm. Таким образом, подключение извне к выходной клемме некоторого резистивного датчика образует делитель напряжения.
9 kOm. Таким образом, подключение извне к выходной клемме некоторого резистивного датчика образует делитель напряжения.
Сигнал с этого делителя может быть подан на клемму Ain5 (аналоговый вход по напряжению) и использован в прикладной программе для здания уставки.
Примеры использования источника совместно с переменным резистором для ручного задания уставки и с термистором для регулирования приводятся на рисунках:
–  –  –
Сервисный режим (СР) в контроллере «Pixel» предназначен для обеспечения возможности управления функционированием контроллера, упрощения процедур диагностики и наладки контроллера.
После входа в СР на экране «Pixel» будет отображаться меню СР, а вся индикация прикладного проекта блокируется. На время работы в СР все действия по кнопкам не оказывают влияния на прикладной проект.
Возврат из меню СР осуществляется по кнопке «Esc» или автоматически по истечении 2 мин. со времени последней активности СР, если на контроллере имеется прикладной проект FBD.
Внимание! Недопустимо использование в проекте (программе) SMLogix комбинации клавиш «r» + «s» (одновременное нажатие), т.к. данная комбинация служит для входа в сервисный режим и для прикладного проекта блокируется.
–  –  –
Для организации интерфейса пользователя при работе в СР в контроллере «Pixel» имеется 5 кнопок различного функционального назначения, – «Esc» «w» «r» «s» «OK», и LCD–-дисплей размером 122х32 точки, – 4 строки по 20 символов в каждой.
–  –  –
Для редактирования параметра необходимо навести курсор на выбранный параметр меню и подтвердить выбор нажатием клавиши «OK». После этого осуществляется вход в редактирование.
В общем виде редактирование выглядит следующим образом:
–  –  –
В верхней строчке экрана отображается название параметра.
На следующей строчке экрана расположена строка редактирования параметра, мигающий курсор на текущем, самом старшем, разряде переменной и текущее значение редактируемой переменной. Количество знакомест в строке редактирования соответствует максимальному числу разрядов переменной с учетом знака.
Количество знакомест в строке редактирования соответствует максимальному числу разрядов переменной с учетом знака.
–  –  –
На самой нижней строчке меню редактирования отображается величина по-умолчанию, – начальное значение переменной, присваиваемое на заводе.
Ввод или редактирование числа осуществляется поразрядно слева направо.
«w» – Переход в строке редактирования к нужному разряду.
При каждом нажатии «w» курсор редактирования перемещается на 1 позицию вправо. В случае, когда курсор займет крайнее правое положение – младший разряд переменной, переход по следующему нажатию «w» произойдет к крайнему левому положению – в старший разряд редактируемой переменной.
Выбор вводимого в разряде символа осуществляется клавишами «r» вверх, или «s» – вниз, последовательно из допустимого набора символов.
–  –  –
Разделитель «_» после значащего числа подразумевает окончание строки редактирование, и символы, идущие после знака «_», отбрасываются.
Например, при попытке присвоить параметру значение из строки редактирования «-34_5678» в качестве значения будет присвоено «-34».
«OK» – Ввод отредактированного параметра.
При этом каждый параметр при вводе проверяется на соответствие диапазону принимаемых значений. При попытке ввода числа, не попадающего в допустимый диапазон, редактируемая переменная принимает предшествующее редактированию значение.
–  –  –
Для работы с Модулем Памяти (МП) при необходимости сохранения прикладного проекта на МП или загрузки его в контроллер из МП можно воспользоваться меню «Сервисы МП». При этом для исполнения 12хххх-х доступна только функция загрузки прикладного проекта с ранее сохраненного МП на контроллер «Pixel».
В меню «Конфигурация» доступны:
–  –  –
Меню «Проект “SMLogix”» (доступно только для исполнения 25хх-хх-х) в случае, если загружен прикладной проект, позволяет произвести останов и запуск выполнения проекта, произвести полный перезапуск, проконтролировать реальный тик системы, а также позволяет задать вручную состояние входов и выходов «Pixel» независимо от состояния проекта (эмуляция входов/выходов).
Для отображения возникающих в процессе работы системных аварий в СР предусмотрен пункт меню «Системные аварии» (доступно только для исполнения 25хх-хх-х). Более подробное описание возникающих системных аварий и работу с ними смотрите в разделе «Системные аварии»
Для восстановления хронологии событий и возникающих аварий в контроллере «Pixel» ведется системный журнал (доступно только для исполнения 25хх-хх-х). Просмотр событий журнала доступен из меню СР «Журнал».
–  –  –
В случае, когда проекту требуется больший объём данных, имеется возможность подключить к контроллеру внешний Модуль Памяти (МП).
Это позволяет увеличить объём хранения данных до 250 Кб.
–  –  –
Помимо возможности хранения данных проекта, в контроллере «Pixel»
предусмотрена функция сохранения и загрузки всего прикладного проекта из Модуля Памяти (МП) без помощи SMLogix, а также автоматическое ведение системного журнала на МП (см. Журнал).
–  –  –
При сохранении прикладного проекта на МП для последующей загрузки в другой контроллер необходимо в первую очередь учитывать размер данных ARRAY/EEPROM.
Если суммарное количество данных ARRAY/EEPROM превышает 256 байт, то все данные с физическим адресом более 255 (нумерация начиная с 0) в процессе работы будут располагаться на внешнем МП.
Т.е. для работы такого проекта потребуется оставить МП подключенным к контроллеру, иначе данные с адресом более 255 попросту негде размещать.
Поэтому, в случае необходимости переноса такого проекта на несколько однотипных контроллеров «Pixel» необходимо для каждого контроллера создавать копию проекта на отдельном МП, поскольку данные каждого контроллера требуют размещения на собственном МП.
Если же размер данных ARRAY/EEPROM менее 256, то после загрузки прикладного проекта с Модуля Памяти в «Pixel», сам МП можно извлечь из «Pixel» без ущерба для дальнейшей работы прикладного проекта (поскольку для работы не требуется внешней энергонезависимой памяти, достаточно имеющейся внутренней).
–  –  –
Точный размер энергонезависимой памяти, необходимый для работы с данными ARRAY/EEPROM, можно проконтролировать в меню Сервисного Режима (СР) «Конфигурация»«Модуль памяти».
–  –  –
Одной из задач, которую приходится решать при работе с «Pixel», является загрузка рабочего проекта (программы “SMLogix”) в контроллер, находящийся на удаленном объекте.
Данную задачу можно решить при помощи Модуля Памяти (МП).
Для этого необходимо из контроллера с рабочим проектом («Pixel» 1) скопировать проект на имеющийся МП, а затем перенести МП на контроллер, в который требуется загрузить данный проект («Pixel» 2).
Примечание. Функция сохранения прикладного проекта на МП реализована только в контроллерах «Pixel» исполнения 25хх-хх-х
–  –  –
Если суммарное количество данных ARRAY/EEPROM в проекте превышает 256 байт, то для работы проекта необходимо оставить МП в слоте «Pixel» 2.
Если после загрузки предполагается использовать МП с «Pixel» 1, то для переноса проекта на «Pixel» 2 нужно сохранять данные на дополнительном МП, используя пункт меню «Сохранить с выбором». (См. «Расширенные возможности») Расширенные возможности
(См. «Расширенные возможности») Расширенные возможности
–  –  –
Если необходимо сделать копию проекта, которая будет использоваться на другом контроллере, и проекту требуется более 256 байт данных ARRAY/EEPROM, то нужно сохранить проект на дополнительный МП, который будет подключен к этому контроллеру.
Естественно, только в случае, если планируется сохранить работоспособность исходного проекта, т.к. обоим контроллерам требуется МП для нормальной работы.
В этом случае, после появления сообщения:
–  –  –
Примечание. Исходным МП для контроллера является модуль, содержащий данные ARRAY/EEPROM, используемые в процессе работы контроллера, проект которого требуется скопировать.
После обнаружения исходного МП контроллер произведет чтение данных для подготовки их к копированию:
–  –  –
Данная функция позволяет загрузить по отдельности или в любых комбинациях любые из 3-х составляющих частей прикладного проекта (программы “SMLogix”) в контроллер из МП.
–  –  –
Необходимо убедиться, что останов программы не приведет к аварийной ситуации на объекте и только после этого нажать кнопку «ОК» для выполнения загрузки нового проекта или обновления конфигурации.
–  –  –
Перед стартом проекта проверяется наличие достаточного места на МП для хранения данных, уставок вновь загруженного проекта.
Если места недостаточно, то на экране отобразится следующий диалог:
–  –  –
Если нажать кнопку «ОК», то проект будет удален с МП и освободившееся место будет использовано для хранения данных и уставок. Если нажать кнопку «ESC», то обращения на запись/чтение к МП будут заблокированы и проект сможет использовать только 256 байт энергонезависимой памяти на внутреннем МП для хранения уставок и данных.
При работе, «Pixel» сохраняет информацию об используемом МП и если пользователь установит другой МП, то на экране может появиться надпись:
–  –  –
2. Создание загрузочного МП для загрузки проекта без использования компьютера на объекте.
Создание загрузочного МП для загрузки проекта без использования компьютера на объекте.
Такая необходимость возникает, если для загрузки проекта на контроллеры использование компьютера неудобно или нежелательно.
–  –  –
Полученный в результате МП может быть использован для загрузки прикладного проекта в контроллер на объекте без помощи ПК. Если проекту требуется наличие внешнего МП, загрузочный МП с уже подготовленными данными блоков EEPROM/ARRAY может быть оставлен на рабочем объекте в качестве основного МП контроллера.
–  –  –
Если в проекте (программе “SMLogix”) была найдена ошибка, которая не затрагивает сетевые настройки и данные EEPROM/ARRAY, то она может быть оперативно исправлена путем быстрой перезагрузки проекта при помощи МП.
Для этого в лаборатории необходимо загрузить во вспомогательный контроллер исправленный проект “SMLogix”. Сохранить исправленный проект, выбрав в меню «Сервисы МП» «Сохранить с выбором»
сохранение только программы без сетевых настроек и данных
EEPROM/ARRAY:
–  –  –
В случае, если изменения в проекте затрагивают данные EEPROM/ARRAY, необходимо создавать копию всего проекта, а для создания такого загрузочного МП либо придется использовать рабочий МП (МП, подключенный к контроллеру на объекте), либо заменить его новым загрузочным, созданным на вспомогательном контроллере.
Это связано с тем, что изменение данных EEPROM/ARRAY (значения уставок, констант и переменных) может повлиять на работу проекта, а все измененные значения EEPROM/ARRAY будут содержаться уже на загрузочном МП, и именно этот МП потребуется контроллеру для нормальной работы после загрузки.
–  –  –
В контроллере «Pixel» в исполнении 25хх-хх-х доступны функции управления прикладным проектом. Данные функции доступны из меню «Проект “SMLogix”».
–  –  –
Только для исполнения 25хх-хх-х.
После загрузки прикладного проекта в «Pixel» может быть доступна функция ручного управления входами/выходами контроллера, если текущая конфигурация контроллера и конфигурация модулей расширения (МР) совпадает с выбранной в проекте SMLogix.
–  –  –
В этом случае в меню «Проект “SMLogix”» «Управление I/O» будет сконфигурировано соответствующее меню для управления аппаратными входами/выходами контроллера и МР, подключенных к системной шине.
Если заданная в проекте конфигурация контроллера не совпадает с текущей конфигурацией объекта (контроллер или МР на системной шине не содержит требуемого количества входов/выходов или физически не подключены), функция управления входами/выходами будет недоступна.
В случае несовпадения конфигурации, в меню «Управление I/O»
отобразится сообщение об ошибке в конфигурации данного модуля:
–  –  –
Об отсутствии или неисправности модуля может свидетельствовать значение идентификатора, равное 0.
После загрузки прикладного проекта состояние каждого входа/выхода может быть переведено в режим ручного управления, когда состояние фиксируется требуемым значением.
Для этого необходимо перевести выбранный вход или выход в режим ручного управления следующим образом:
–  –  –
Редактирование состояния переменной станет недоступно.
Внимание! Режим ручного управления входами/выходами для всех модулей автоматически отключается после загрузки проекта или сброса по питанию.
–  –  –
В меню Сервисного режима (СР) «Конфигурация» доступны следующие функции:
Версия ядра, серийный номер и модификация изделия, информация о состоянии сетевой карты и модуле памяти, настройки порта Сом (RS485) и управление запросами мастер по этому порту для возможности загрузки проекта из «SMLogix» по RS485 в случае, если по этому порту работает мастер сети ModBus.
–  –  –
Для хранения данных проекта, таких как уставки, константы или различные переменные, в «SMLogix» предусмотрены блоки сохранения EEPROM и ARRAY.
При помощи этих блоков данные в проекте могут быть записаны или прочитаны из энергонезависимой памяти контроллера «Pixel».
В меню «Модуль памяти» содержится информация о доступном объеме энергонезависимой памяти контроллера «Pixel».
–  –  –
Каждый контроллер имеет в распоряжении 256 байт внутренней энергонезависимой памяти EEPROM, доступной для хранения пользовательских данных проекта.
В случае, когда проекту требуется больший объём данных, имеется возможность подключить к «Pixel» внешний Модуль Памяти (МП).
Это позволяет увеличить объём хранения данных до 250 Кб, а также получить в свое распоряжение такие функции, как сохранение и загрузка прикладного проекта и системный журнал (набор функций ограничен для исполнения 12хх-хх-х).
–  –  –
Аналогично, при извлечении МП из слота, контроллер фиксирует отсутствие дополнительного МП и прекращает работу с ним. Работа продолжается только со встроенным МП.
Примечание. В случае использования проекта с МП и объёмом данных EEPROM/ARRAY больше 256 байт рекомендуется располагать самые критичные и необходимые данные по младшим адресам в пределах 0 … 255, т.к. в случае удаления МП данные по адресам свыше 255 будут недоступны.
–  –  –
При наличии внешнего МП следует убедиться, что разрешена работа с этим МП, – в нижней строчке экрана имеется соответствующая надпись.
Если МП содержит сохраненный ранее проект или уставки и данные от другого проекта, и, после соответствующего предупреждения от использования данного МП отказались (см.
«Сервисы модуля памяти»), на дисплее в меню «Конфигурация» «Модуль памяти» отобразится:
–  –  –
Это означает, что внешний МП заблокирован, для работы используется только 256 байт встроенной памяти. В этом случае также возникает авария «Переполнение EEPROM». Для того, чтобы устранить аварию, необходимо обеспечить необходимый для работы проекта объём данных EEPROM. Для этого нужно либо заменить имеющийся МП на аналогичный свободный, либо через меню «Разрешить работу МП»
разрешить использовать в проекте имеющийся МП.
При этом, при попытке подключения МП через меню «Разрешить работу
МП», контроллер выдаст соответствующее предупреждение:
–  –  –
В случае подтверждения, все находящиеся на МП данные будут стерты.
После этого, если объема МП для проекта достаточно, авария устраняется, работа блоков сохранения EEPROM и ARRAY в проекте будет восстановлена.
В случае нажатия кнопки «ESC», МП будет заблокирован и информация на нем будет недоступна для записи/чтения. При этом находящиеся на МП данные (Другой сохраненный проект или его данные) будут сохранены.
–  –  –
Вход в меню СР осуществляется при одновременном нажатии комбинации кнопок «r» и «s». Выключения или останова контроллера не требуется.
–  –  –
Настройки порта Сом (RS485) Для настройки параметров порта Сом (RS485) в Сервисном режиме (СР) контроллера «Pixel» предусмотрен пункт меню «СОМ-порт».
–  –  –
Для обеспечения контроля надежной работы и упрощения диагностики, а также для удобства обнаружения, предотвращения и устранения возможных неисправностей и исключения ошибочных ситуаций при работе контроллера «Pixel» предусмотрена система контроля аварийных ситуаций и оповещение пользователя об их возникновении.
Для визуального оповещения о возникновении аварийной ситуации на лицевой стороне корпуса предусмотрен индикатор аварий – красный аварийный светодиод.
В зависимости от исполнения в «Pixel» предусмотрено различное количество контролируемых аварийных ситуаций и различные способы обнаружения аварий, их обработки и отключения.
Возникновение аварий вызывает срабатывание красного аварийного светодиода. Диод начинает часто мигать.
После устранения возникшей аварии диод либо автоматически гаснет (исполнение 12хх-хх-х), либо для этого требуется сбросить аварию при помощи специального менеджера аварий в меню «Системные аварии»
(исполнение 25хх-хх-х.).
–  –  –
Сброс аварий и аварийной индикации В контроллере «Pixel» в исполнении 12хх-хх-х сброс аварий и выключение аварийной индикации происходит автоматически после устранения аварии. Таким образом, наличие аварийной индикации свидетельствует о наличии активной аварии в настоящий момент времени.
Для исполнения 25хх-хх-х сброс или отключение аварийной индикации производится в специальном меню обработки аварий при помощи менеджера аварий – меню «Системные аварии».
В случае однократного возникновения или после устранения причин авария, в отличие от исполнения 12хх-хх-х, не сбрасывается автоматически до тех пор, пока не будет произведено её подтверждение в меню «Системные аварии».
Наличие аварийной индикации в этом случае свидетельствует либо о наличии активной аварии в настоящий момент времени, либо об однократном (кратковременном) возникновении аварийной ситуации в процессе работы. Более подробно разобраться в этом поможет менеджер аварий в меню «Системные аварии».
Меню «Системные аварии»
В контроллере «Pixel» в исполнении 25хх-хх-х для регистрации происходящих в процессе работы контроллера аварийных ситуаций в СР предусмотрено специальное меню «Системные аварии».
Все возникающие в процессе работы контроллера аварии регистрируются в меню «Системные аварии» и могут быть доступны для просмотра и обработки с целью надлежащего корректного устранения аварий и их последствий, а также анализа причин их возникновения.
При наличии подключенного МП все возникающие в процессе работы аварии, время и дата их возникновения заносятся в Журнал.
–  –  –
В момент возникновения новой аварии менеджер аварий инициализирует создание соответствующего ей пункта в меню «Системные аварии».
Менеджер присваивает аварии статус «Активно» и подключает аварийную индикацию – включается частое мигание аварийного диода.
–  –  –
Внимание! После включения аварийной индикации управление работой красного светодиода из прикладного проекта блокируется, диод переходит под управление внутреннего менеджера аварий О наличии не устраненных активных аварий сигнализирует значок «»
напротив пункта «Системные аварии».
–  –  –
При этом, если причина аварии в последствии самоустраняется (однократная или редко возникающая авария), аварийная индикация не выключается, статус аварии «Активно» сохраняется. Значок «»
напротив пункта «Системные аварии» отключается.
Для окончательного устранения аварий необходимо редактировать статус аварии из меню сервисного режима.
–  –  –
Красный светодиод аварийной индикации – в режиме частого мигания.
Для отключения аварии и аварийной индикации необходимо перевести статус аварии в состояние «Подтверждено»
–  –  –
Если на момент подтверждения аварии причина аварии устранена, авария удаляется из меню «Системные аварии». Аварийная индикация отключается (Если нет других аварий со статусом «Активно»).
–  –  –
Аварии присваивается статус «Подтверждено». Аварийная индикация при этом не отключается, аварийный светодиод переходит в режим редкого мигания (Если нет других аварий со статусом «Активно»).
После этого авария может быть удалена из меню повторным подтверждением после устранения причины аварии.
Если по каким-либо причинам авария не может быть устранена в текущий момент времени или ее устранение отложено, а аварийную индикацию данной аварии нужно отключить для контроля возникновения других аварий, то статус аварии может быть переведен в состояние запрета активности.
–  –  –
Примечание. После загрузки прикладной программы с использованием компьютера или Модуля Памяти все имеющиеся аварии сбрасываются, статусы обнуляются.
Внимание! Аварии, находящиеся в состоянии запрета активности или в состоянии «Подтверждено», вновь перейдут в состояние «Активно» после загрузки, если их причина не была устранена к моменту загрузки.
–  –  –
В контроллере «Pixel» в процессе работы ведется непрерывный внутренний контроль напряжений питания.
Автоматически контролируется напряжение батареи, уровень внешнего напряжения питания всего контроллера «Uпит. +24В» и внутреннее питание платы процессорного модуля «Uпит. +5В»
В случае, если уровень напряжения батареи или внешнего питания не соответствует требуемым для нормальной работы контроллера, возникает соответствующая авария (см. раздел «Системные аварии»).
Проконтролировать состояние напряжений в сети можно при помощи меню Сервисного режима (СР) «Питание».
–  –  –
В контроллерах исполнения 25хх-хх-х при наличии подключенного МП автоматически ведется журнал системных событий.
Под журнал зарезервирован объем 4КБ на внешнем МП, и журнал может содержать до 250 записей различных событий.
События последовательно сохраняются в энергонезависимой памяти. В случае заполнения журнала полностью более новые события вытесняют самые старые.
–  –  –
Запись содержит порядковый номер события в списке, дату и время регистрации события его описание и дополнительную вспомогательную информацию.
–  –  –
означающая, что достигнут начальный адрес списка, и более старых событий в журнале нет.
При достижении самой свежей записи после нажатия кнопки «r» на экране отобразится надпись:
–  –  –
В контроллере «Pixel» реализованы энергозависимые часы реального времени и календарь. Если в контроллере установлена батарея питания, то время и дата поддерживаются даже при отключении основного питания.
Просмотр и редактирование текущего времени и даты доступен как из проекта (программы) “SMLogix” (FBD-блоки «Время и Дата»), так и из меню Сервисного Режима (СР) «Время и дата».
–  –  –
предусмотрена возможность загрузки ядра из компьютера стандартными средствами Windows без помощи специальных программаторов.
Для этого достаточно воспользоваться программой HyperTerminal – стандартной компонентой Windows.
В ядро контроллера «Pixel» встроен автоматический загрузчик ядра.
Передача осуществляется по протоколу 1K Xmodem. Файл, содержащий ядро контроллера имеет расширение *.SIM, файл с настройками подключения HyperTerminal – расширение *.ht Версию ядра – файл с обновлениями и исправлениями (*.sim), и файл с настройками подключения HyperTerminal (*.ht) можно найти на сайте «Segnetics» http://www.segnetics.com/.
–  –  –
Программа HyperTerminal является стандартным компонентом Windows.
Для загрузки ядра контроллера при помощи компьютера, HyperTerminal необходимо настроить на передачу в «Pixel».
Файл конфигурации (с расширением *.ht) доступен на сайте «Segnetics»
http://www.segnetics.com/. Он автоматически запускает программу HyperTerminal со всеми необходимыми настройками для загрузки ядра «Pixel».
Примечание. Если HyperTerminal не установлен на вашем компьютере, его необходимо установить при помощи стандартных средств установки Windows.
В случае, если по какой-либо причине файл конфигурации HyperTerminal недоступен, имеется возможность настроить программу самостоятельно.
–  –  –
2. Выберите в меню Файл, команду Новое подключение.
3. В открывшемся окне Описание подключения задайте Название создаваемого подключения (напр. load), выберите понравившийся вам Значок:
–  –  –
10. После этого закройте окно программы HyperTerminal с сохранением внесенных изменений. Теперь по кнопке Пуск, в меню команды Все программы, Стандартные, Связь появится дополнительная вкладка HyperTerminal, в которой будет доступно созданное подключение.
–  –  –
1. Подключите клеммы питания к контроллеру «Pixel». При этом источник питания должен быть выключен.
–  –  –
3. Запустите HyperTerminal с использованием ранее созданного подключения. Файл конфигурации (с расширением *.ht) доступен на сайте «Segnetics» http://www.segnetics.com/.
Он автоматически запускает программу HyperTerminal со всеми необходимыми настройками для загрузки ядра «Pixel».
Подключение также может быть создано самостоятельно. (см. раздел Настройка HyperTerminal).
4. Выберите номер СОМ – порта компьютера, к которому подключен конвертер RS485/ RS232 для загрузки контроллера.
Для этого в окне программы HyperTerminal в меню Вызов выберите команду Отключить (если сеанс связи активен). В меню Файл выберите Свойства.
В открывшемся окне в поле Подключаться через: задайте номер порта подключения:
–  –  –
8. Включите питание контроллера «Pixel». Он самостоятельно активирует процесс передачи. Счетчик пакетов в поле Пакет: начнет наращиваться, в поле Файл: начнет заполняться индикатор процесса передачи:
Счетчик пакетов в поле Пакет: начнет наращиваться, в поле Файл: начнет заполняться индикатор процесса передачи:
–  –  –
9. Закройте программу HyperTerminal. Контроллер готов к работе. Если после загрузки «Pixel» автоматически не запустился, т.е. не выводится заставка или индикация прикладной программы, то выключите и включите питание контроллера.
–  –  –
Возможные ошибки и трудности
1. В процессе загрузки ядра произошел сбой. Счетчик пакетов не обновляется, процесс передачи остановлен:
Процесс передачи необходимо возобновить. Выключите питание контроллера. Остановите процесс передачи по кнопке Отмена.
Перезапустите процесс передачи HyperTerminal. Включите питание контроллера.
Примечание. Для инициализации процесса загрузки котроллер должен находиться в состоянии выключения не менее 3с.
2. После запуска процесса передачи и включения контроллера процесс передачи не запускается.
–  –  –
3. После успешной загрузки контроллер автоматически не запустился, т.е. не выводится заставка или индикация прикладной программы.
После успешной загрузки контроллер автоматически не запустился, т.е. не выводится заставка или индикация прикладной программы.
Выключите питание контроллера на время более 3с и включите его снова. Если контроллер не запускается, повторите процесс загрузки.
–  –  –
6. Приложение 1. Системная страница (СС).
Системная страница – адресное пространство контроллера «Pixel», где расположены данные, содержащие системную информацию о контроллере и позволяющие управлять его работой. Доступ к СС осуществляется через доступные каналы связи по протоколу Modbus RTU.
Для СС зарезервировано регистровое адресное пространство с 0xFE00 по 0xFFFF.
Для чтения информации используются запросы Read Holding Registers (функция 0x03). Для записи информации в СС используются запросы Write Multiple Registers (функция 0x10).
–  –  –
105. См.: Уголовно-процессуальное право Российской Федерации: Учеб. / Под ред. П.А. Лупинской. М., 20. ..»ЕЖЕМЕСЯЧНЫЙ НАУЧНО – ТЕХНИЧЕСКИЙ И ПРОИЗВОДСТВЕННЫЙ ЖУРНАЛ Издается при содействии ® Комплекса архитектуры, №3 строительства, развития и реконструкции Москвы,
HUMAN AND SOCIETY № 2 (11) – 2011 Редакционный совет Председатель доктор военных наук, доктор технических наук, профессор, заслуженный работник высшей школы Российской Федерации, лауреат премии Пра…» образа женщины, механизмы создания и успешно…» ПРИНЦИПАХ Специальность 05.13.19 – Методы и системы защиты информации. Информационная безопасность АВТОРЕФЕРАТ диссертации на соискание ученой степени кандидата технически…»
..»ЕЖЕМЕСЯЧНЫЙ НАУЧНО – ТЕХНИЧЕСКИЙ И ПРОИЗВОДСТВЕННЫЙ ЖУРНАЛ Издается при содействии ® Комплекса архитектуры, №3 строительства, развития и реконструкции Москвы,
HUMAN AND SOCIETY № 2 (11) – 2011 Редакционный совет Председатель доктор военных наук, доктор технических наук, профессор, заслуженный работник высшей школы Российской Федерации, лауреат премии Пра…» образа женщины, механизмы создания и успешно…» ПРИНЦИПАХ Специальность 05.13.19 – Методы и системы защиты информации. Информационная безопасность АВТОРЕФЕРАТ диссертации на соискание ученой степени кандидата технически…»
«RU 2 461 569 C2 (19) (11) (13) РОССИЙСКАЯ ФЕДЕРАЦИЯ (51) МПК C07K 16/18 (2006.01) C12N 15/13 (2006.01) C12N 15/63 (2006.01) A61K 39/395 (2006.01) A61P 25/00 (2006.01) ФЕДЕРАЛЬНАЯ СЛУЖБА ПО ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ (12) ОПИСАНИЕ ИЗОБРЕТЕНИЯ К ПАТЕНТУ (21)(22) Заявка: 2009118621/10, 18.10.2007 (72) Автор(ы):…»
2017 www.сайт – «Бесплатная электронная библиотека – различные документы»
Материалы этого сайта размещены для ознакомления, все права принадлежат их авторам.
Если Вы не согласны с тем, что Ваш материал размещён на этом сайте, пожалуйста, напишите нам , мы в течении 1-2 рабочих дней удалим его.
Контроллер Pixel устроен по принципу персонального компьютера — можно изменять его составляющие в зависимости от возникающих потребностей. Не требуется платить за неиспользуемые каналы или интерфейсы. Увеличение базовых ресурсов контроллера обеспечивается путем простого подключения дополнительных модулей.
Сетевые карты
Съемные сетевые карты — обеспечивают коммуникацию в сети Lonworks или Ethernet. При переходе с протокола на протокол не потребуется дополнительного программирования логического контроллера Pixel. Карты заказываются отдельно, что несомненно удобно и при заказе контроллеров.
Модули расширения
Преимущества использования модулей расширения бесспорны.
позволяют увеличить количество каналов ввода-вывода до 64. При добавлении новых модулей нет необходимости демонтировать контроллер Pixel или разбирать его, при этом достигнута максимальная автоматизация процесса: раздача адресов, горячий подхват и т. д.
д.
Модуль памяти
Модуль PMM предназначен для съема архивов и для загрузки рабочих программ в контроллер Pixel . Скорость подготовки контроллеров к работе возрастает, так как появилась возможность сохранять и переносить управляющие программы с его помощью.
Графический дисплей
Графический дисплей контроллера Pixel позволяет выводить графики и текст различного размера.
Программные пакеты
Удобство программирования обеспечивается с помощью уникального инструмента SMConsctructor — пакета автоматического создания программ для контроллеров и Pixel . SMConsctructor позволяет быстро создавать управляющие программы и адаптировать их под конкретный объект. Конструктор имеет простой понятный интерфейс, и освоить его может любой человек, знакомый с системами вентиляции.
Купить контроллер PIXEL и получить техническую консультацию Вы можете у Группы Компаний «Автоматизация».
C vs Assembler | Электроника для всех
Если ты впервые столкнулся с микроконтроллерами, то наверняка у тебя стал выбор на чем писать.
На Си или на Ассемблере. Выбор не прост, не зря программисты однокристальщики раскололись на два непримиримых лагеря. Одни с пеной у рта доказывают, что те кто пишут на Си лохи изнеженные, а настоящий брутальный кодер должен воспринимать только ассемблер. Другие же, усераясь, доказывают, что на ассемблере разве что лампочками помигать можно, а какой либо серьезный проект делать на низком уровне невозможно.
Но, истинна, как всегда, находится посредине. Каждый уважающий себя программер должен знать ассемблер, а вот писать должен на том, что более подходит под масштаб задачи. Особенно это касается микроконтроллеров.
Assembler+
Парадоксально, но под микроконтроллеры писать на ассемблере ничуть не сложней чем на Си. В самом деле, программирование контроллера неотделимо от его железа. А когда пишешь на ассемблере, то обращаешься со всей периферией контроллера напрямую, видишь что происходит и как это происходит. Главное, что при этом ты четко понимаешь что, как и зачем ты делаешь. Очень легко отлаживать и работа программы как на ладони.
Главное, что при этом ты четко понимаешь что, как и зачем ты делаешь. Очень легко отлаживать и работа программы как на ладони.
Да и сам ассемблер изучается очень быстро, за считанные дни. Достаточно постоянно иметь перед глазами систему команд и навык программирования алгоритмов. А соответствующее состояние мозга, когда начинаешь мыслить ассемблерными конструкциями наступает очень быстро.
C-
А вот с высокими языками, например с Си, ситуация уже куда хуже. Да, повторить какой нибудь пример из обучалки, вроде вывода строки на дисплей, Сях куда проще, подключил нужную библиотеку, набрал стандартную команду и вот тебе результат. Но это только так кажется. На самом деле, стоит чуть вильнуть в сторону, как начинается темный лес. Особенно когда дело начинает касаться адресации разных видов памяти,
Напомню, что у AVR, как и подавляющего числа МК, память разделена на код и данные и адреса у них в разных адресных пространствах о которых стандарт Си ничего не знает, ведь он расчитан на некий универсальный вычислитель.
А тут приходится вводить всякие модификаторы, квалификаторы и без яростного курения мануалов разобраться в этих примочках бывает очень сложно. Особенно работа с памятью осложняется тем, что программа то работает в том и другом случае, но вот если неправильно указать тип памяти, то оперативка забьется константами и в дальнейшем программу скрючит в самый неподходящий момент. Вот и найди такой глюк
работе на прерываниях, использованию многопоточных процессов, использующих одни и те же ресурсы.
Вот и получается, что программа вроде компилится, но работает совершенно не так как тебе нужно, а почему непонятно. Или мусор начинает вываливать вместо данных, или перезагружается невпопад. Или работает, но иногда чудит. Пытаешься смотреть что происходит в системных регистрах и переменных, а там каша какая то. Пытаешься понять как это получилось и тупо загниваешь, т.к. не можешь найти концы.
В таких случаях обычно открывают листинг и смотрят что там происходит в коде на уровне команд процессора, но вот засада — без знания ассемблера там делать нечего! Зато если понимаешь то как работает программа на уровне команд, то найти багу вроде срыва стека или нарушения атомарного доступа проще простого.
Ну и такие гадкие вещи как overhead. Программа на Си требует значительно больше оперативной памяти, значительно больше места во flash памяти, работает куда медленней чем ассемблерная программа. И если на обычном компьютере с его гигагерцами частот, гигабайтами оперативки и дисковой памяти это не столь критично, то вот для контроллера с жалкими килобайтами флеша, у которого частота порой не превышает 16 мегагерц, а оперативки и килобайта не наберется, такой расход ресурсов более чем критичен.
Кроме того существуют такие контроллеры как ATTiny 1x у которых либо вообще нет оперативки, либо она такая мизерная, что даже стек там сделан аппаратным. Так что на Си там ничего написать в принципе нельзя.
Assembler+
Представь, что ты прораб, а компилятор это банда джамшутов. И вот надо проделать дырку в стене. Даешь ты джамшутам отвертку и говоришь — ковыряйте. Проковряют они отверткой бетонную стену? Конечно проковыряют, вопрос лишь времени и прочности отвертки. Отвертка сточится (читай памяти процессора или быстродействия не хватит)? Не беда — дадим джамшутам отвертку побольше, благо разница в цене между большой отверткой и маленькой копеечная. В самом деле, зачем прорабу, руководителю, знать такие низкоуровневые тонкости, как прочность и толщина бетонной стены, типы инструмента. Главное дать задание и проконтроллировать выполнение, а джамшуты все сделают сами.
Отвертка сточится (читай памяти процессора или быстродействия не хватит)? Не беда — дадим джамшутам отвертку побольше, благо разница в цене между большой отверткой и маленькой копеечная. В самом деле, зачем прорабу, руководителю, знать такие низкоуровневые тонкости, как прочность и толщина бетонной стены, типы инструмента. Главное дать задание и проконтроллировать выполнение, а джамшуты все сделают сами.
Задача решается? Да! Эффективно это решение? Совершенно нет! А почему? А потому что прораб не знал, что бетон твердый и отверткой его проковырять сложно. А будь прораб сам когда то рабочим, пусть даже не профи, но своими руками положил плитку, посверлил дырки, то впредь таких идиотских заданий бы не давал. Конечно, нашего прораба можно и в шараге выучить, дав ему всю теорию строения стен, инструмента, материалов. Но ты представь сколько это сухой теории придется перелопатить, чтобы чутье было интуитивным, на уровне спинного мозга? Проще дать в руки инструмент и отправить сверлить стены. Практика — лучший учитель.
Практика — лучший учитель.
Также и с ассемблером. Хочешь писать эффективные программы на высокоуровневом языке — изучи хотя бы один ассемблер, попиши на нем немного. Чтобы потом, глядя на любую Сишную строку, представлять себе во что это в итоге компилируется и как обрабатывается контроллером. Очень помогает в отладке и написании, а уж про ревесирование чужих программ я вообще не говорю.
Assembler-
Но засиживаться в ассемблерщиках и стараться все сделать на нем далеко не обязательно. Ассемблерный код тяжелей переносить с контроллера на контроллер, в нем при переносе можно наделать много незначительных, но тем не менее фатальных ошибок. Отладка которых занимает много времени. Большие проекты писать на ассемблере то еще развлечение. На ассемблере трудно сделать полноценную библиотеку, подключаемую куда угодно. Ассемблер жестко привязан к конкретному семейству контроллеров.
С+
Си хорош за счет огромного числа готового кода, который можно очень легко и удобно подключать и использовать в своих нуждах. За большую читабельность алгоритмов. За возможность взять и перетащить код, например, с AVR на ARM без особых заморочек. Или с AVR на PIC. Разумеется для этого надо уметь ПРАВИЛЬНО писать на Си, выделяя все аппаратно зависимые части в HAL.
За большую читабельность алгоритмов. За возможность взять и перетащить код, например, с AVR на ARM без особых заморочек. Или с AVR на PIC. Разумеется для этого надо уметь ПРАВИЛЬНО писать на Си, выделяя все аппаратно зависимые части в HAL.
Общий расклад примерно таков, что использование высокоуровневого языка на контроллерах с обьемом памяти меньше 8 килобайт является избыточным. Тут эффективней писать все на Ассемблере. Особенно если проект подразумевает не просто мигание светодиодом.
8-16 килобайт тут уже зависит от задачи, а вот пытаться писать на ассемблере прошивку более 16 килобайт можно, но это напоминает прокладку тоннеля под Ла Маншем с помощью зубила.
В общем, знать надо и то и другое. Настоятельно тебе рекомендую начать изучать МК с ассемблера.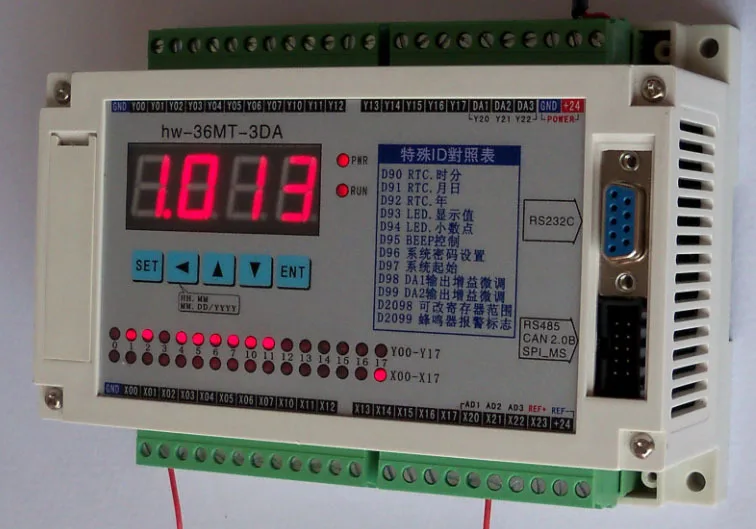 А как только поймешь, что на асме можешь реализовать все что угодно, любой алгоритм. Когда досконально прочувствуешь работу стека, прерываний, организацию переходов и ветвлений. Когда разные трюки и хитрости, вроде игр с адресами возврата из прерываний и процедур, переходами и конечными автоматами на таблицах и всякие извраты будут вызывать лишь интерес, но никак не взрыв мозга из серии «Аааа как это работает??? Не понимаю?!!»
А как только поймешь, что на асме можешь реализовать все что угодно, любой алгоритм. Когда досконально прочувствуешь работу стека, прерываний, организацию переходов и ветвлений. Когда разные трюки и хитрости, вроде игр с адресами возврата из прерываний и процедур, переходами и конечными автоматами на таблицах и всякие извраты будут вызывать лишь интерес, но никак не взрыв мозга из серии «Аааа как это работает??? Не понимаю?!!»
Вот тогда и можно изучать Си. Причем, изучать его с дебагером в руках. Не просто изучить синтаксис (там то как раз все элементарно), а понять ЧТО и КАК делает компилятор из твоего исходника. Поржать над его тупостью или наоборот поудивляться извратам искуственного интелекта. Понять как компилятор делает ветвления, как организует циклы, как идет работа с разными типами данных, как ведется оптимизация. Где ему лучше помочь, написав в ассемблерном стиле, а где не критично и можно во всю ширь использовать языковые возможности Си.
А вот начать изучение ассемблера после Си мало кому удается. Си расслабляет, становится лень и впадлу. Скомпилировалось? Работает? Ну и ладно. А то что там быдлокод, та пофигу… =)
А как же бейсик, паскаль и прочие языки? Они тоже есть на AVR?
Конечно есть, например BascomAVR или MicroPASCAL и во многих случаях там все проще и приятней. Не стоит прельщаться видимой простотой. Она же обернется тем, что потом все равно придется переходить на Си.
Дело в том, что мир микроконтроллеров далеко не ограничивается одним семейством. Постоянно появляются новые виды контроллеров, развиваются новые семейства. Ведь кроме AVR есть еще и ARM, PIC, STM8 и еще куча прекрасных контроллеров со своими плюсами.
И под каждый из этих семейств есть Си компилятор. Ведь Си это, по сути, промышленный стандарт. Он есть везде и контроллер который не имеет под него компилятора популярным у профессионалов не станет никогда.
А вот на бейсик с паскалем, обычно, всем пофигу. Если на AVR и PIC эти компиляторы и сделали, то лишь потому, что процы эти стали особо популярны у любителей и там наверняка найдется тот, кто заинтересуется и бейсиками всякими. С другим семейством контроллеров далеко не факт, что будет также радужно. Например под STM8 или Cortex M3 я видел Pascal в лучшем случае только в виде кривых студенческих поделок. Никак не тянущих на нормальный компилятор.
Если на AVR и PIC эти компиляторы и сделали, то лишь потому, что процы эти стали особо популярны у любителей и там наверняка найдется тот, кто заинтересуется и бейсиками всякими. С другим семейством контроллеров далеко не факт, что будет также радужно. Например под STM8 или Cortex M3 я видел Pascal в лучшем случае только в виде кривых студенческих поделок. Никак не тянущих на нормальный компилятор.
Такой разный Си
С Си тоже не все гладко. Тут следует избегать компиляторов придумывающих свои диалектные фишки. Например, CodeVision AVR (CVAVR) позволяет обращаться к битам порта с помощью такого кода:
1 | PORTB.7 = 1; // Выставить бит 7 порта B в 1 |
PORTB.7 = 1; // Выставить бит 7 порта B в 1
Удобно? Конечно удобно! Вот только в Си так делать нельзя, стандарт языка не позволяет. И ни один другой Си компилятор такой кусок кода не примет. Т.к. по стандарту корректней будет так:
Использование диалектов не позволит тебе скакать с компилятора на компилятор.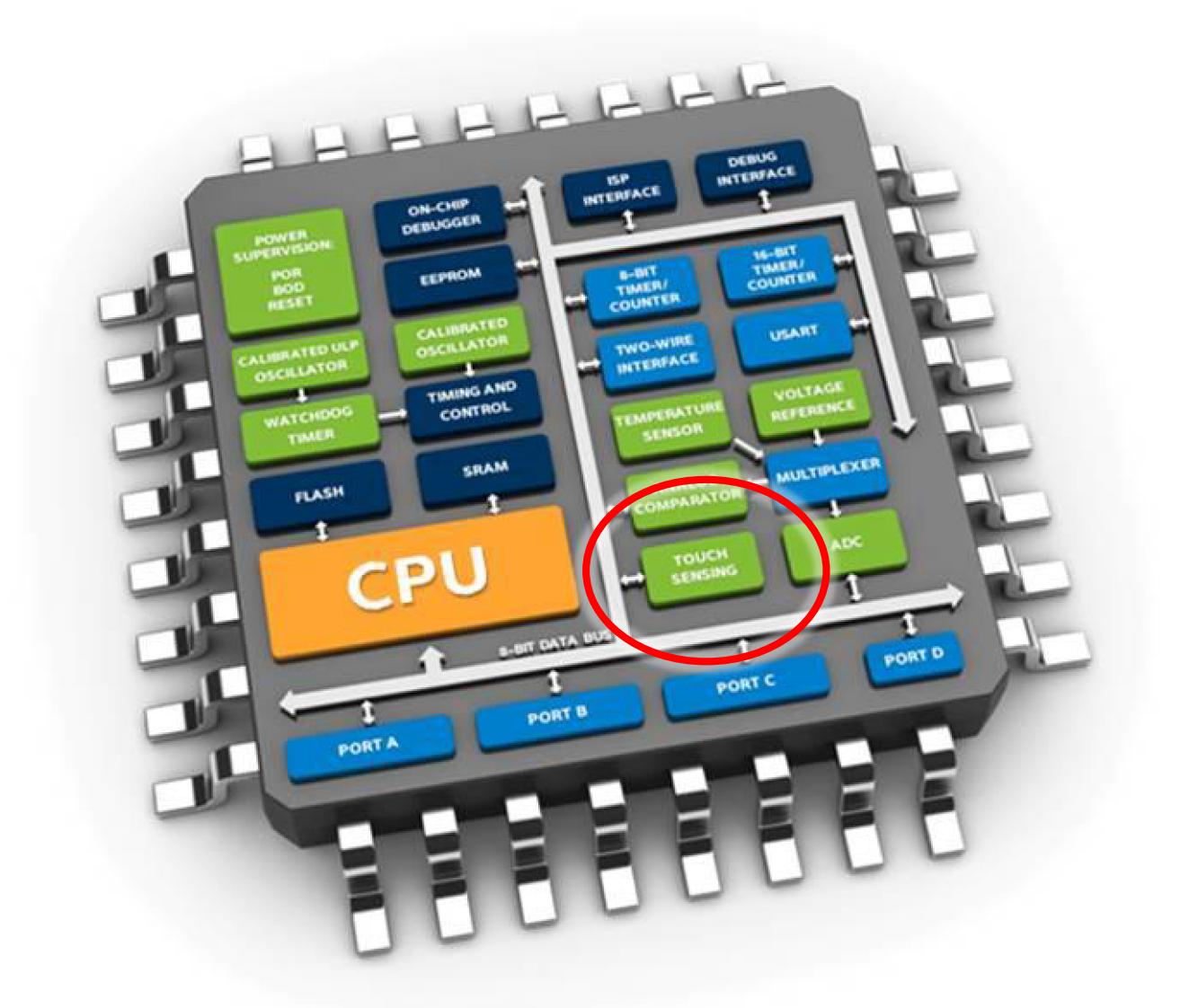 Таскать код повсюду копипастом. Привязывает к одному конкретному компилятору и далеко не факт, что он окажется хорошим и будет поддерживать все новые контроллеры семейства.
Таскать код повсюду копипастом. Привязывает к одному конкретному компилятору и далеко не факт, что он окажется хорошим и будет поддерживать все новые контроллеры семейства.
Приплюснутый
Некоторое время назад я считал, что С++ в программировании микроконтроллеров не место. Слишком большой overhead. C тех пор мое мнение несколько поменялось.
Мне показали очень красивый кусок кода на С++, который компилился вообще во что то феерическое. Компактней и быстрей я бы и на ассемблере не факт что написал. А уж про читабельность и конфигурируемость и говорить не приходится. Все из знакомых программистов, кто видел этот код, говорили что-то вроде «Черт, а я то думал, что я знаю С++».
Так что писать на С++ можно! Но сделать компактный и быстрый код на С++ чертовски виртуозная задача, надо знать этот самый С++ в совершенстве. Судя по тому, что столь качественных примеров эффективности С++ при программировании под МК мне попадалось раз-два, то видимо пороговый уровень входа в эту область весьма и весьма велик.
В общем, как говорил Джон Кармак, «хороший С++ код лучше чем хороший С код. Но плохой С++ может быть намного ужасней чем плохой С код».
7 курсов для изучения программирования ПЛК онлайн
Вы хотите заняться разработкой систем управления? Возможно, вы уже работаете в области управления или автоматизации и хотите улучшить свои навыки. Что ж, в этой статье мы собираемся изучить некоторые популярные (и доступные) онлайн-курсы для изучения программирования ПЛК.
Если вы обратитесь непосредственно к производителю (Rockwell Automation или Siemens), эти курсы могут стоить тысячи долларов. Вот несколько высококачественных альтернативных онлайн-курсов, которые помогут вам изучить программирование ПЛК.
1. Учебный курс по промышленной автоматизации
Сначала у нас есть учебный курс по промышленной автоматизации. Если вы новичок в области промышленной автоматизации и ПЛК, этот курс даст вам хороший целостный обзор.
Этот курс не будет углубляться в мир конкретной марки ПЛК, поэтому, если вы хотите стать мастером Аллена-Брэдли или Сименса, это не курс. Я рекомендую проверить некоторые другие курсы в этом списке.
Я рекомендую проверить некоторые другие курсы в этом списке.
Что вы можете ожидать узнать
- Design Factory Автоматизация от А до Я.
- Электрические панели автоматизации проектирования.
- Нарисовать схему электрических панелей.
- Расчет сечения кабеля для любого проекта.
- Конструкция Цепи управления приводом двигателя.
- Получите знания и практический опыт использования частотно-регулируемого привода.
- Изучите программирование ПЛК в релейной диаграмме (LD).
- Изучите программирование ПЛК в функциональных блоках (FB).
- Изучите программирование ПЛК в структурированном тексте (ST).
- Изучите программирование ПЛК на непрерывной блок-схеме (CFC).
- Дизайн человеко-пользовательских интерфейсов (HMI).
- Конструктивная защита электрических щитов.
- Узнайте о различных датчиках, существующих в отрасли.
Курс Логистика и регистрация
Курс на 100% онлайн через Udemy. Вы можете получить доступ к урокам курса на всю жизнь и учиться в удобном для вас темпе. Он предназначен для инженеров-электриков, инженеров по контролю, компьютерам и промышленных предприятий. Однако всем, кто желает изучить автоматизацию производства и средства управления, рекомендуется зарегистрироваться.
Вы можете получить доступ к урокам курса на всю жизнь и учиться в удобном для вас темпе. Он предназначен для инженеров-электриков, инженеров по контролю, компьютерам и промышленных предприятий. Однако всем, кто желает изучить автоматизацию производства и средства управления, рекомендуется зарегистрироваться.
Рекомендую пройти курс более 1-2 недель. В противном случае вы можете забыть о материалах и начать все заново.
2. Изучение релейной логики ПЛК
Еще один замечательный курс программирования ПЛК – Learning PLC Ladder Logic на LinkedIn Learning. Этот курс разработан, чтобы развеять мистику программирования лестничной логики. Итак, если лестничная логика вас смущает, я не могу порекомендовать этот курс в достаточной степени.
Курс покажет вам основы написания программ ПЛК в релейной логике, как использовать операторы И и ИЛИ, а также множество общих шаблонов релейной логики (фиксация, ответвления, таймеры и счетчики).
Что вы можете ожидать узнать
Инструкции ввода и вывода.
Полевые устройства и программные инструкции.
Добавление нескольких входов с использованием методов И и ИЛИ.
Добавление нескольких выходов.
Что означает ветвление в релейной логике.
Использование инструкций вывода с фиксацией / разблокировкой.
Инструкции таймера и счетчика.
Курс Логистика и регистрация
Пройдите этот курс онлайн через LinkedIn Learning. Кроме того, когда вы закончите, вы можете продемонстрировать свои новые навыки в своем профиле LinkedIn. Это довольно удобно, особенно если вы хотите получить повышение или сменить карьеру.
LinkedIn Learning предлагает бесплатную 30-дневную пробную версию, которую вы можете использовать для прохождения этого курса. Никаких оправданий! Зарегистрируйтесь и начните изучать лестничную логику уже сегодня!3. ПЛК Siemens S7-1200 и человеко-машинный интерфейс с использованием TIA Portal
Как я упоминал ранее, большинство заводов уже установили, какой бренд ПЛК они собираются использовать. На некоторых заводах представлены разные бренды, но многие усилия по созданию новых Factory 4.0 и PLC сосредоточены на стандартизации технологий. Курс Siemens S7-1200 PLC & HMI научит вас основам программирования и HMI Siemens.
На некоторых заводах представлены разные бренды, но многие усилия по созданию новых Factory 4.0 и PLC сосредоточены на стандартизации технологий. Курс Siemens S7-1200 PLC & HMI научит вас основам программирования и HMI Siemens.
Я рекомендую выбрать Siemens или Allen-Bradley, если вы в настоящее время не работаете или не знаете, какой контроллер изучать. Siemens немного более доступен, чем средний контроллер Allen-Bradley Logix (за исключением серии Micro), к тому же вы можете получить бесплатную 30-дневную пробную версию портала TIA через их веб-сайт.
Что вы можете ожидать узнать
- Узнайте, как взаимодействовать с ПЛК на ПК с помощью Siemens TIA Portal.
- Узнайте, как преобразовать стандартные схемы в схемы ПЛК (лестничная логика).
- Изучите основные команды Siemens S7-1200 в TIA.
Курс Логистика и регистрация
Я не могу подчеркнуть, насколько важно использовать стандартное оборудование в вашем обучении. В противном случае вы просто тратите время на сторонние бренды, которые не используются на большинстве крупных фабрик.
В противном случае вы просто тратите время на сторонние бренды, которые не используются на большинстве крупных фабрик.
Если на вашем предприятии используются ПЛК Siemens, я НАСТОЯТЕЛЬНО рекомендую пройти этот курс по ПЛК и HMI Siemens S7-1200. Будучи специалистом по программированию Аллена-Брэдли, я смог пройти этот курс и быстро освоить настройку ПЛК S7-1200 и HMI KTP 400 за несколько недель. Не слишком потрепанный!
4. Обучение ПЛК Allen-Bradley с RSLogix 5000 и Studio5000
С другой стороны, если вы знаете, что собираетесь работать с ПЛК Allen-Bradley (или хотите быть программистом A-B), тогда нет смысла проходить курс Siemens.Курсы ControlLogix через Rockwell Automation могут стоить более 5000 долларов за сеанс.
Из-за этого я рекомендую проверить PLC Training с RSLogix 5000 и Studio5000 на Udemy. Этот курс представляет собой небольшую часть стоимости и покажет вам, как ориентироваться в Studio5000 (ранее RSLogix 5000).
Что вы можете ожидать узнать
- Уметь полностью настраивать и программировать в RSLogix 5000 и Studio 5000 с нуля.

- Этот курс научит новичков программировать ПЛК Allen-Bradley с нуля с помощью RSLogix 5000 и Studio 5000.
Курс Логистика и регистрация
Если вы совершенно не знакомы с ПЛК и ваша работа требует устранения неполадок релейной логики в Studio, то вам стоит записаться на этот курс. Менее чем за 50 долларов вы получите пожизненный доступ. Так что, если вы пройдете курс и захотите просмотреть материал через несколько месяцев, вы сможете это сделать.
Я прошел и курсы Рокуэлла за 5000 долларов, и курсы Удеми за 40 долларов. Они оба хороши, но доступ к онлайн-курсу позволяет очень легко ссылаться на концепции на лету.Если вы хотите получить максимальную отдачу, пройдите этот онлайн-курс.
5. FactoryTalk ME с проектированием системы ПЛК SCADA
Следующий курс предназначен для более продвинутых программистов ПЛК, желающих познакомиться с программированием HMI, концепциями Factory 4.0 и проектированием систем SCADA. Если вы не ограничиваетесь изучением основ программирования ПЛК, то вам нужно изучить программирование HMI и более сложные темы, связанные с ПЛК.
Что вы можете ожидать узнать
- Вы будете хорошо понимать, что делает HMI, как он это делает, а также каковы результаты этих действий.
- Вам будет удобно создавать базовые макеты экранов HMI и устранять сложные существующие.
- Вы лучше поймете производственные системы в целом.
- Создание полнофункциональных программ HMI.
- Понимать и применять передовой опыт разработки HMI к своим проектам.
Курс Логистика и регистрация
Сбор данных и управление ими очень важны для современных предприятий. Это особенно важно, если вы хотите сделать карьеру в сфере автоматизации или ИТ.Если вы знаете, как программировать HMI, ПЛК и FactoryTalk ME, у вас есть очень хорошие шансы получить это повышение. Это особенно верно, если фабрика, на которой вы работаете, – это магазин Allen-Bradley.
6. Автоматизация производства с использованием ПЛК
Чтобы вывести свои навыки программирования ПЛК на новый уровень, вы можете записаться на курс «Автоматизация производства с использованием ПЛК».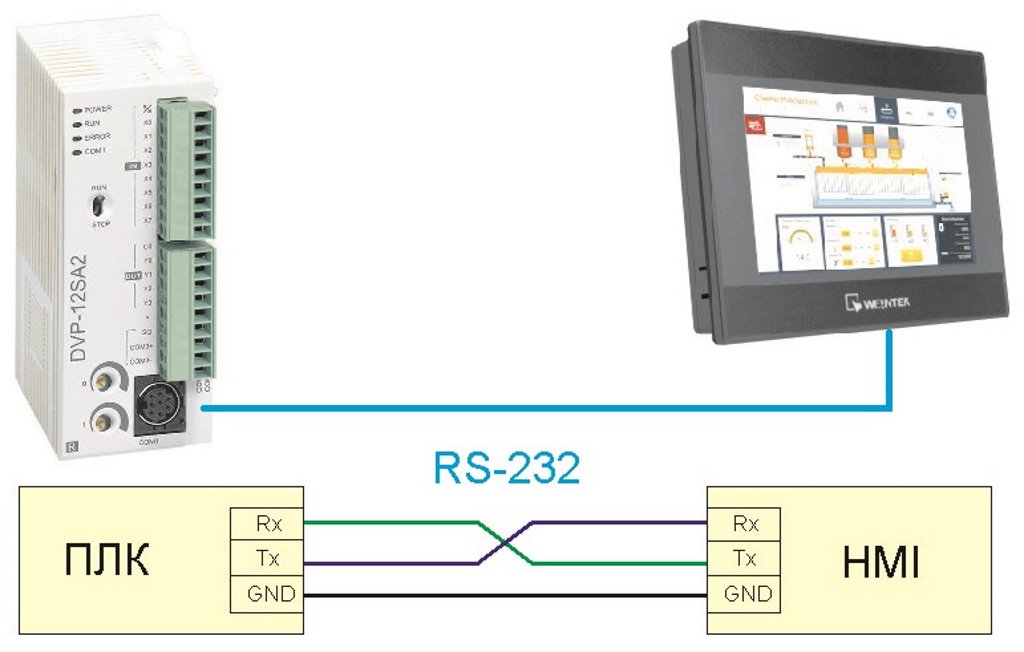 Вы узнаете, как взаимодействовать с ПЛК в заводской системе, что является ценным навыком. Интеграция всегда является самой сложной частью этих автоматизированных рабочих ячеек, поэтому этому бесценному навыку нужно научиться.
Вы узнаете, как взаимодействовать с ПЛК в заводской системе, что является ценным навыком. Интеграция всегда является самой сложной частью этих автоматизированных рабочих ячеек, поэтому этому бесценному навыку нужно научиться.
Используйте свои навыки программирования ПЛК и начните управлять конвейерами, манипуляторами промышленных роботов и т. Д. Вы можете использовать смоделированный ПЛК или реальное оборудование. Он даже отлично подходит для создания прототипов.
Что вы можете ожидать узнать
- Чтобы узнать, как построить систему промышленной автоматизации в соответствии с приложением.
- Изучите механику установки датчиков и исполнительных механизмов на машине.
- Моделирование вашей промышленной системы с помощью PLC Logics.
- Тестирование и анализ реализуемости проекта.
Вероятно, самая крутая часть этого курса – моделирование автоматизированных ячеек с использованием Factory I / O. Это означает, что вы можете построить автоматизированные ячейки стоимостью в несколько миллионов долларов в моделировании без использования реального оборудования. Для всех вас, легендарного магната американских горок, это злых, крутых!
Для всех вас, легендарного магната американских горок, это злых, крутых!
7. Программирование частотно-регулируемого привода, сервоприводов и шаговых приводов с использованием ПЛК Delta и Allen-Bradley
Наконец, у нас есть еще один более продвинутый курс по ЧРП, сервоприводам и шаговым приводам.Этот курс посвящен системам управления Delta и Allen-Bradley. Думаю, стоит пройти этот курс, если вы хотите получить более продвинутые навыки работы с системами управления. Кроме того, для выполнения многих заданий по программированию ПЛК среднего звена требуется опыт работы с частотно-регулируемым приводом.
Что вы можете ожидать узнать
- Для программирования ЧРП и сервопривода с параметрами настройки, подходящими для приложения.
- Для разработки схемы “под ключ” для частотно-регулируемых приводов и сервоприводов.
- Для взаимодействия ЧРП и сервопривода с ПЛК для интеллектуальных операций.
Курс Логистика и регистрация
Не многие программисты ПЛК или инженеры по контролю понимают установку и конфигурацию драйверов частотно-регулируемых приводов, сервоприводов и шаговых двигателей. С учетом сказанного, если вы освоите эти навыки, вы будете на шаг впереди своих конкурентов, когда дойдете до должности старшего инженера по контролю.
С учетом сказанного, если вы освоите эти навыки, вы будете на шаг впереди своих конкурентов, когда дойдете до должности старшего инженера по контролю.
Еще одним преимуществом этого курса является то, что вы будете использовать два популярных на рынке ЧРП: Delta M Series и Allen-Bradley Powerflex 4M.Довольно круто!
Следующие шаги для обучения
Как и в случае с любым новым навыком, лучший способ улучшить программирование ПЛК – это попрактиковаться в программировании ПЛК. Я настоятельно рекомендую взять ПЛК и подключить простой ввод-вывод. Micro820 – это доступный ПЛК (450 долларов США), а программное обеспечение CCW бесплатное. Я не рекомендую покупать ПЛК стороннего производителя, если только это не единственный вариант. Большинство крупных компаний используют продукты Rockwell Automation или Siemens, поэтому, если вы научитесь одному из них (или обоим сразу), у вас больше шансов получить работу.
Если вы уже работаете в компании, которая использует ПЛК, попробуйте получить лицензию для игры на портале TIA (Siemens) или Studio5000 (Rockwell Automation). Эти лицензии дороги (от 4000 до 12000 долларов), поэтому, если у вас уже есть доступ к ним на работе, тем экономичнее будет для вас изучить их. Кроме того, чем больше у вас возможностей для управления программным и аппаратным обеспечением, тем быстрее вы сможете писать и устранять неполадки в сложных системах автоматизации.
Эти лицензии дороги (от 4000 до 12000 долларов), поэтому, если у вас уже есть доступ к ним на работе, тем экономичнее будет для вас изучить их. Кроме того, чем больше у вас возможностей для управления программным и аппаратным обеспечением, тем быстрее вы сможете писать и устранять неполадки в сложных системах автоматизации.
Обязательно ознакомьтесь с моей статьей о программировании ПЛК с релейной логикой.И, если у вас есть вопросы, оставьте их в разделе комментариев ниже.
Support Content Like This
Бесплатное обучение ПЛК для начинающих Часть 1: Введение в ПЛК
18 мая 2020
Если вы хотели заняться промышленной автоматизацией и искали базовое обучение ПЛК, но не знаете, с чего начать, то эта серия блогов по бесплатному обучению ПЛК для начинающих была написана для вас!
Прочитав эту бесплатную серию обучающих программ по ПЛК, состоящую из 4 частей, вы сможете определить основные компоненты системы ПЛК и получить общее представление о назначении и функциях ПЛК (и PAC).
По завершении этой серии статей вы должны быть готовы начать изучение программирования ПЛК. Если у вас есть какие-либо вопросы по поводу этого контента, не стесняйтесь комментировать сообщение . Итак, без дальнейших задержек, давайте сразу перейдем к нашему введению в ПЛК!
Серии бесплатного обучения ПЛК для начинающих Схема
- Введение в ПЛК
- Процессоры ПЛК (ЦП)
- Входы и выходы ПЛК (I / O)
- Релейная логика ПЛК
Программируемые логические контроллеры (ПЛК) – это небольшие промышленные компьютеры с модульными компонентами, предназначенными для автоматизации настраиваемых процессов управления.ПЛК часто используются на фабриках и промышленных предприятиях для управления двигателями, насосами, освещением, вентиляторами, выключателями и другим оборудованием. Чтобы лучше понять назначение ПЛК, давайте взглянем на краткую историю ПЛК.
Чтобы лучше понять назначение ПЛК, давайте взглянем на краткую историю ПЛК.
История
Промышленная автоматизация началась задолго до ПЛК. В начале и середине 1900-х годов автоматизация обычно выполнялась с использованием сложных электромеханических релейных схем. Однако количество реле, проводов и места, необходимое для создания даже простой автоматизации, было проблематичным.Для автоматизации простого производственного процесса могут потребоваться тысячи реле! А если что-то в логической схеме нужно было поменять? О, парень!
ПРИМЕЧАНИЕ. На базовом уровне электромеханические реле работают путем магнитного размыкания или замыкания своих электрических контактов, когда катушка реле находится под напряжением. Это очень полезные устройства, которые по-прежнему играют важную роль в промышленной автоматизации (более подробный урок по электромеханическим реле можно найти в этой публикации ).
В 1968 году появился первый программируемый логический контроллер, который заменил сложные релейные схемы на промышленных предприятиях. ПЛК был разработан так, чтобы его могли легко программировать заводские инженеры и техники, которые уже были знакомы с релейной логикой и схемами управления. С самого начала ПЛК можно было программировать с использованием релейной логики, которая была разработана для имитации схем цепей управления. Лестничные диаграммы выглядят как схемы управления, в которых мощность течет слева направо через замкнутые контакты, чтобы запитать катушку реле.
ПЛК был разработан так, чтобы его могли легко программировать заводские инженеры и техники, которые уже были знакомы с релейной логикой и схемами управления. С самого начала ПЛК можно было программировать с использованием релейной логики, которая была разработана для имитации схем цепей управления. Лестничные диаграммы выглядят как схемы управления, в которых мощность течет слева направо через замкнутые контакты, чтобы запитать катушку реле.
Пример релейной логики
Как видите, релейная логика выглядит как простая схема цепи управления, где источники ввода, такие как переключатели, кнопки, датчики приближения и т. Д., Показаны слева, а источники вывода показаны справа. Возможность программировать сложные автоматизированные процессы с помощью интуитивно понятного интерфейса, такого как релейная логика, значительно упростила переход от релейной логики к ПЛК для многих в отрасли.
Хотя первые ПЛК были очень ограничены в возможностях памяти и скорости, с годами они быстро улучшились. Наличие ПЛК помогло упростить проектирование и внедрение промышленной автоматизации. Чтобы узнать больше об истории ПЛК, прочтите эту замечательную небольшую статью от AutomationDirect здесь.
Наличие ПЛК помогло упростить проектирование и внедрение промышленной автоматизации. Чтобы узнать больше об истории ПЛК, прочтите эту замечательную небольшую статью от AutomationDirect здесь.
Как работают ПЛК?
ПЛКможно охарактеризовать как небольшие промышленные компьютеры с модульными компонентами, предназначенными для автоматизации процессов управления. ПЛК – это контроллеры, лежащие в основе почти всей современной промышленной автоматизации. У ПЛК много компонентов, но большинство из них можно отнести к следующим трем категориям:
- Процессор (ЦП)
- Входы
- Выходы
ПЛК – сложные и мощные компьютеры.Но мы можем описать функцию ПЛК простыми словами. ПЛК принимает входы, выполняет логику на входах в ЦП, а затем включает или выключает выходы на основе этой логики. Позже мы рассмотрим это более подробно, а пока представьте себе это так:
- ЦП контролирует состояние входов (например, включение, выключение датчика приближения, открытие клапана на 40% и т.
Д.)
- CPU принимает информацию, которую он получает от входов, выполняет логику на входах
- ЦП управляет логикой выходов (напр.выключить мотор, открыть вентиль и т. д.)
См. Блок-схему ниже для визуального представления вышеперечисленных шагов.
Блок-схема функций ПЛК
Давайте воспользуемся знакомым примером, чтобы проиллюстрировать, как работают ПЛК. Ваша посудомоечная машина. Многие посудомоечные машины имеют микропроцессоры, которые работают аналогично ПЛК. Посудомоечная машина имеет входы, выходы и, конечно же, центральный процессор. Некоторыми входами в контроллер посудомоечной машины могут быть кнопки на передней панели, датчики воды и дверной выключатель.Некоторые из выходов посудомоечной машины – это водяные клапаны, нагревательные элементы и насосы. Теперь давайте подумаем, как посудомоечная машина использует эти различные компоненты.
ПРИМЕЧАНИЕ. Помните, что ЦП – это процессор посудомоечной машины, который запрограммирован на принятие всех решений, которые мы увидим ниже. Это похоже на процессор ПЛК (ЦП), который принимает логические решения в зависимости от состояния входа.
Это похоже на процессор ПЛК (ЦП), который принимает логические решения в зависимости от состояния входа.
- Пользователь нажимает кнопку режима цикла (вход обнаружен)
- Пользователь нажимает кнопку пуска (обнаружен вход)
- CPU проверяет, что дверь закрыта (обнаружен вход)
- Открывается заправочный клапан, и посудомоечная машина начинает наполнение водой (выход активирован)
- ЦП ожидает, пока не будет достигнут надлежащий уровень воды (обнаружен вход)
- Заправочный клапан закрывается, и поток воды прекращается (выход активирован / деактивирован)
- Нагревательный элемент включен (выход активирован)
- ЦП ожидает, пока не будет достигнута надлежащая температура воды (обнаружен вход)
- Дозатор мыла открывается (выход активирован)
- Водяной насос включается для подачи воды через распылители (выход активирован)
- CPU начинает отсчет времени в зависимости от типа цикла (активирован логический таймер)
- Водяной насос выключается (выход отключен)
- Нагревательный элемент выключен (выход деактивирован)
- Сливной клапан открывается, и посудомоечная машина начинает слив грязной воды (выход активирован)
- ЦП ожидает, пока не обнаружит, что уровень воды достаточно низкий (вход активирован / деактивирован)
- Сливной клапан закрывается (выход активирован / деактивирован)
- Заливной клапан снова открывается для ополаскивания посуды (выход активирован)
- Водяной насос включается для подачи воды через распылители (выход активирован)
- CPU начинает отсчет времени (активирован логический таймер)
- Водяной насос выключается (выход отключен)
- Сливной клапан открывается, и посудомоечная машина начинает слив промывочной воды (выход активирован)
- ЦП ожидает, пока не обнаружит, что уровень воды достаточно низкий (вход активирован / деактивирован)
- Сливной клапан закрывается (выход активирован / деактивирован)
- Нагревательный элемент включается для нагрева воздуха внутри посудомоечной машины и сушки посуды (выход активирован)
- ЦП ждет, пока не будет достигнута надлежащая внутренняя температура (вход активирован)
- CPU начинает отсчет времени (активирован логический таймер)
- Нагревательный элемент выключен (выход активирован / деактивирован)
График управления посудомоечной машиной
Дискретный и аналоговый ввод / вывод
Входы и выходы часто обозначаются аббревиатурой «I / O». В приведенном выше примере с посудомоечной машиной мы обрабатывали каждый вход и выход как дискретный или цифровой сигнал.
В приведенном выше примере с посудомоечной машиной мы обрабатывали каждый вход и выход как дискретный или цифровой сигнал.
Дискретные сигналы – это сигналы, которые могут быть только включены или выключены. Это самый простой и наиболее распространенный тип ввода-вывода. В нашем примере мы не использовали аналоговый ввод / вывод.
Хотя в системе управления посудомоечной машиной может быть некоторое использование аналогового ввода-вывода, я хотел, чтобы этот пример был простым.
С аналоговыми сигналами, вместо возможностей включения / выключения или открытия / закрытия, у вас может быть 0 – 100%, 4 – 20 мА, 0 – 100 градусов Цельсия или что-то еще, что вы измеряете как вход или движение как выход.Мы рассмотрим это более подробно в части 3 серии «Бесплатное обучение ПЛК для начинающих».
ПЛК или PAC?
Возможно, вы слышали о программируемом контроллере автоматизации (PAC). Этот термин был впервые введен в употребление исследовательской фирмой ARC в 2001 году, чтобы отличить оригинальные ПЛК от более новых, более мощных и гибких контроллеров, которые выходили на рынок.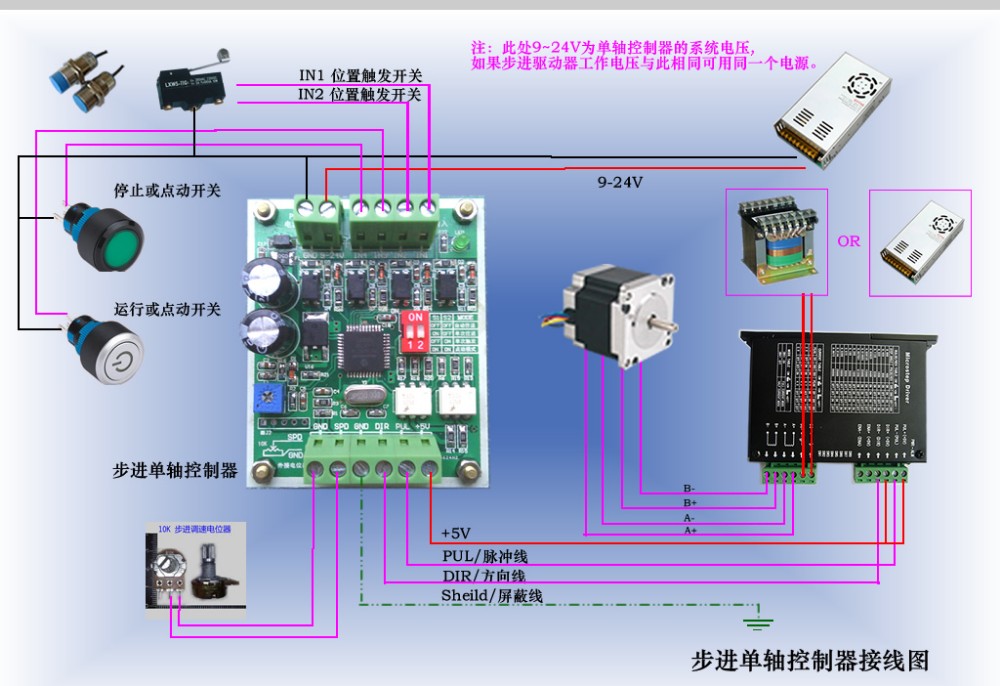 Существуют разногласия по поводу различий в определениях между PAC и PLC, и часто эти термины используются в промышленности как синонимы.Я сам часто использую эти термины как синонимы. Эта статья из Control Engineering может помочь вам понять различия между ПЛК и PAC. На мой взгляд, PAC всегда лучший выбор, если только система не очень проста и минимизация стоимости проекта жизненно важна. Современный пользовательский интерфейс, дополнительная мощность и память большинства PAC позволяют легко превзойти большинство PLC.
Существуют разногласия по поводу различий в определениях между PAC и PLC, и часто эти термины используются в промышленности как синонимы.Я сам часто использую эти термины как синонимы. Эта статья из Control Engineering может помочь вам понять различия между ПЛК и PAC. На мой взгляд, PAC всегда лучший выбор, если только система не очень проста и минимизация стоимости проекта жизненно важна. Современный пользовательский интерфейс, дополнительная мощность и память большинства PAC позволяют легко превзойти большинство PLC.
Allen-Bradley, один из нынешних лидеров в области промышленной автоматизации, фактически отказывается от своих линий ПЛК, таких как PLC-5, и вместо этого сосредотачивается на своих линиях PAC, таких как ControlLogix и CompactLogix.Лично я считаю, что это отличный ход. Среди множества других преимуществ PAC, удобство использования Rockwell RSLogix 5000 / Studio 5000 Logix Designer (программное обеспечение для программирования для ControlLogix / CompactLogix PAC) намного превосходит более старое программное обеспечение RSLogix 5/500 (программное обеспечение для программирования для PLC-5 и SLC500). ).
).
Опыт работы с ПЛК и ПКП важен для всех, кто интересуется работой с промышленной автоматизацией. Однако ПКК – это будущее, в котором вы будете проводить большую часть своего времени в качестве инженера / техника по промышленной автоматизации.
Заключение
Теперь вы должны лучше понять, что такое ПЛК, их историю и как они работают. Во второй части этой серии мы рассмотрим контроллер ПЛК (ЦП) более подробно. Так что обязательно настройтесь на это!
Щелкните здесь, чтобы перейти ко второй части серии бесплатных тренингов по ПЛК для начинающих
П.С. Хотите узнать больше о нашем онлайн-курсе по ПЛК? Ознакомьтесь с нашим курсом в myPLCtraining Academy.
Получите бесплатную шпаргалку по ПЛК
ПЛК на самом деле не так уж и сложны.Если вы новичок в ПЛК или просто хотите лучше понять, как они работают, ознакомьтесь с этой бесплатной памяткой, которая называется «Руководство для мотивированных электриков по пониманию ЛЮБОЙ системы ПЛК».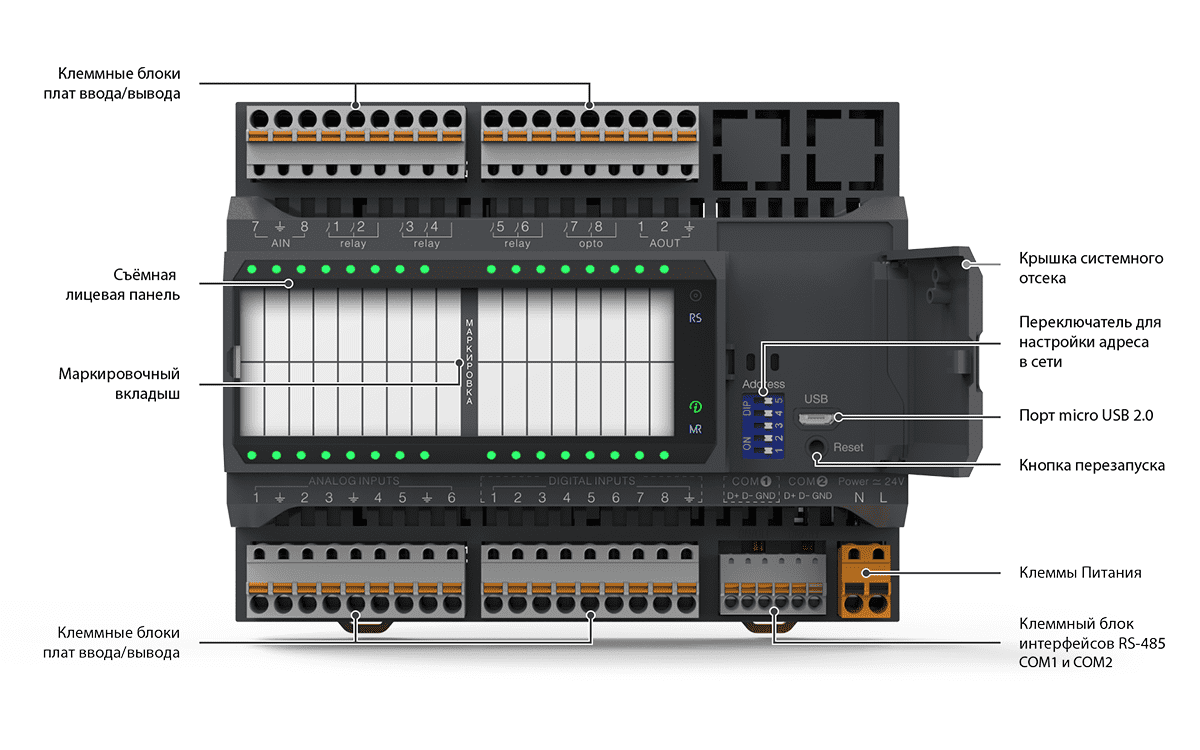
Как изучить ПЛК и войти в мир промышленной автоматизации: PLC
Мы получаем темы, спрашивающие, как изучать ПЛК еженедельно, так что эта липкая тема будет охватывать большинство основ и будет постоянно развиваться.Если ваш пост был удален и вам было предложено прочитать стикер, вот и все!
Ваша местная техническая школа может предложить программы автоматизации, проверьте там.
Бесплатные программы для ПЛК:
Бесплатные онлайн-курсы:
Для RSLogix 5000 вы можете взглянуть на эти руководства: Краткое руководство по программированию контроллеров Logix5000 Общие процедуры для контроллеров Logix5000 (здесь ссылки на другие руководства ). Это руководство дает хорошее общее объяснение тегов, дополнительных инструкций (AOI), определяемых пользователем типов данных (UDT), релейной логики, подпрограмм и т.
Д… И как только вы углубитесь в него, этот форум представляет собой вопросы и ответы по ПЛК, вы можете найти ответы на большинство своих вопросов с помощью функции поиска. Не только для ПЛК, но и для SCADA, промышленных сетей и т. Д.
Платные онлайн-курсы:
Другое:
HMI / SCADA:
Симуляторы:
Форумы:
Книги:
Книги:
Каналы Youtube
Dipsy Logic
https://www.youtube.com/user/ParsicAutomation/videos
https: // www.youtube.com/user/plcprofessor/videos
https://www.youtube.com/user/bigbadtech/videos
https://www.youtube.com/user/thegeterrdone/videos
https://www.youtube. com / user / Evan5659 / videos
Личные истории:
/ u / DrEagleTalon
Здравствуйте, рад, что вы пришли сюда за помощью. Я инженер по автоматизации на заводе Tysons Foods в Индиане. Я работаю с ПЛК ежедневно и недавно был в Айове для повышения квалификации. У меня нет диплома, только опыт и мне 27 лет.Я не хвастаюсь, но зарабатываю более 30 долларов в час и люблю свою работу. Это просто показывает, что то, что вы изучаете сейчас, может продвинуть вашу карьеру. ПЛК необходимы на каждом заводе / заводе в мире (по большей части). Он пользуется большим спросом, и технологии развиваются. Это отличный курс, и я надеюсь, он вам понравится и вы останетесь на нем. Вы могли далеко уйти.
У меня нет диплома, только опыт и мне 27 лет.Я не хвастаюсь, но зарабатываю более 30 долларов в час и люблю свою работу. Это просто показывает, что то, что вы изучаете сейчас, может продвинуть вашу карьеру. ПЛК необходимы на каждом заводе / заводе в мире (по большей части). Он пользуется большим спросом, и технологии развиваются. Это отличный курс, и я надеюсь, он вам понравится и вы останетесь на нем. Вы могли далеко уйти.
С этим в стороне, если бы я был там, где вы, я бы начал с RSLogix Pro. Это программное обеспечение от The Learning Pit, оно простое и старое, но очень полезное. Программное обеспечение проведет вас через симуляции, такие как гаражные ворота, светофор, бункер и бокс, конвейеры и устрашающее моделирование лифта.Это поможет вам научиться применять полученные знания в реальных обстоятельствах. Это заставляет вас разрабатывать все самостоятельно и, на мой взгляд, является одним из лучших инструментов обучения для начинающих. Он начинается с легкого, опускает пальцы ног и становится все труднее. Наблюдать за анимацией тоже весело. Наблюдать и слышать, как загорелась дверь вашего гаража или ваш боксерский боксерский бункер сбрасывает тонны «зерна», пока комната не заполнится, – это весело и делает завершение симуляции очень приятным.
Наблюдать за анимацией тоже весело. Наблюдать и слышать, как загорелась дверь вашего гаража или ваш боксерский боксерский бункер сбрасывает тонны «зерна», пока комната не заполнится, – это весело и делает завершение симуляции очень приятным.
Хотя RSLogix Pro основан на более старом программном обеспечении, RsLogix все еще используется сегодня. Почти на каждом заводе, на котором я работал, использовались ПЛК Allen Bradley того или иного типа. Studio 5000 широко используется, и вы обнаружите, что большая часть релейной логики применима в большинстве мест. С учетом сказанного, я также обращаюсь к Udemy за помощью в выполнении простых инструкций и в расширенных функциях, таких как PID. Этот удивительный курс по ПЛК на UDemy очень дешев, дает вам программное обеспечение и научит всему, от новичка до самого продвинутого.На мой взгляд, это того стоит для всех на любом уровне, и я часто обращаюсь к этому ресурсу.
Также, уходя от Аллена Брэдли, я бы посоветовал попытаться найти несколько загрузок или получить шанс поиграть с Unity Pro XLS. Это от Schneider Electric, и я полагаю, что теперь он был переименован в семью EcoStruxure. Мы широко используем Unity там, где я нахожусь, и модиконы чрезвычайно популярны в отрасли. Еще вы можете попробовать купить PICO или Zelio для PICOSoft или ZELIOSoft. Они маленькие, простые и дешевые.Я подключил этим свою гаражную дверь, и это был отличный способ научиться рукам, когда я только начинал. Вы можете найти использованные PICO на eBay очень дешево. В Интернете есть масса литературы и видео. YouTube – еще один хороший ресурс. Проверьте все, узнайте все, что сможете. Еще одно популярное программное обеспечение, где я был, – Connected Components Workbench и Vijeo.
Это от Schneider Electric, и я полагаю, что теперь он был переименован в семью EcoStruxure. Мы широко используем Unity там, где я нахожусь, и модиконы чрезвычайно популярны в отрасли. Еще вы можете попробовать купить PICO или Zelio для PICOSoft или ZELIOSoft. Они маленькие, простые и дешевые.Я подключил этим свою гаражную дверь, и это был отличный способ научиться рукам, когда я только начинал. Вы можете найти использованные PICO на eBay очень дешево. В Интернете есть масса литературы и видео. YouTube – еще один хороший ресурс. Проверьте все, узнайте все, что сможете. Еще одно популярное программное обеспечение, где я был, – Connected Components Workbench и Vijeo.
Удачи, надеюсь, это поможет. Не стесняйтесь писать мне для получения дополнительной информации или деталей.
[Пошаговая инструкция] Как бесплатно научиться программированию ПЛК дома?
Когда я давно начал изучать программирование ПЛК (программируемого логического контроллера), у меня было много вопросов.
- Как изучить ПЛК?
- Какие темы о ПЛК мне следует осветить?
- Могу ли я бесплатно изучить ПЛК дома?
Если да,
- Какое программное обеспечение требуется для ПЛК?
- Как установить ПЛК на мой персональный компьютер, не платя за это?
Теперь, приложив усилия для изучения программирования ПЛК и работая над некоторыми проектами ПЛК, я хотел бы поделиться своими мыслями.
Как научиться программированию ПЛК от нуля до героя?
Первым шагом является установка всего необходимого программного обеспечения для программирования ПЛК.
Чтобы преуспеть в программировании ПЛК, вы должны следовать некоторой стандартной процедуре разработки любого проекта ПЛК.
Давайте посмотрим по порядку, начиная с установки программного обеспечения ПЛК.
Как установить программное обеспечение ПЛК в вашей системе?
ПЛК имеет различные марки программного обеспечения ПЛК и язык программирования ПЛК. Каждое программное обеспечение имеет свои специфические функции, адреса и конфигурации программного обеспечения для моделирования.
Каждое программное обеспечение имеет свои специфические функции, адреса и конфигурации программного обеспечения для моделирования.
К сожалению, большая часть стандартного программного обеспечения ПЛК не бесплатна.Они очень дороги для студентов или отдельных лиц.
Хорошие новости. Некоторые из этих брендов предоставляют бесплатную базовую версию для практики и изучения программирования ПЛК.
Если вы новичок и изучаете ПЛК, я полагаю, что для ваших нужд достаточно использовать эту бесплатную версию программного обеспечения для ПЛК любой марки.
Вы можете БЕСПЛАТНО загрузить программное обеспечение Delta PLC с их официального сайта. Выберите версию, подходящую для вашей компьютерной системы. Установите его.
Вы также можете загрузить программное обеспечение WPLSoft PLC и установить его.
Установка довольно проста, как и установка любого другого программного обеспечения. Никаких специальных настроек и настроек не требуется.
Если вы столкнетесь с трудностями при установке ПО ПЛК, напишите в разделе комментариев.
Что будет дальше после установки ПЛК в вашей системе?
Чтобы понять на практике, найдите учебное пособие по ПЛК для запуска двигателя. Это первый пример программирования, который вам стоит попробовать.
Теперь, как научиться мастерить ПЛК?
Стандартная процедура изучения ПЛК и моделирования
Следуйте приведенным ниже инструкциям для разработки оперативного программирования и обучения моделированию ПЛК.
Настройка и установка:
- Сначала установите программное обеспечение для программирования ПЛК. (Это мы видели ранее в этой статье.)
- Выберите любой язык программирования. В промышленности в основном используется язык программирования лестничных диаграмм (LD).
Если вы новичок, рассмотрите LD в качестве языка программирования для изучения. Позже вы сможете выбрать другие языки программирования в зависимости от ваших требований и опыта.
Базовые знания, необходимые для программирования ПЛК:
- Получите надлежащие знания обо всех необходимых устройствах подключения ПЛК, таких как ввод и вывод.
- Выберите правильные цепочки и адреса ввода / вывода.
- Выберите нормально открытый [NO] или нормально закрытый [NC] контакт ввода / вывода в соответствии с потребностями проекта.
- Установите память, таймер, счетчик и другие функции, и они будут адресованы в соответствии с требованиями вашего проекта.
- Разработайте логическую последовательность операций программы, используя логический вентиль.
- Соблюдайте некоторые важные правила программирования.
- Подключите оборудование. Вам нужны различные протоколы связи ПЛК, используемые в отрасли.
Выполнение вашей первой программы ПЛК:
- Сохраните и загрузите программу в ПЛК.
- Проверить ошибку и запустить / запустить симуляцию программы.
Эти 11 шагов очень полезны для моделирования программного обеспечения ПЛК. Если вы выполняете пошаговые инструкции, вы можете легко построить и смоделировать программу.
Кривая обучения и процедура могут незначительно отличаться в зависимости от программного обеспечения ПЛК, их конкретных функций, инструментов и различных типов различных приложений управления оборудованием.
Как стать мастером-программистом ПЛК?
Большинство начинающих программистов ПЛК пишут программу ПЛК напрямую.Они не соблюдают никаких правил, логической последовательности и шагов операций программирования ПЛК.
Не делайте этого.
При разработке крупных проектов ПЛК вы потеряетесь, не соблюдая надлежащих правил и шагов. И проект станет сложным для понимания и доработки.
Единственный способ освоить программирование ПЛК…
Помните, что изучение любых языков программирования – это не мгновенный успех. Вы должны тренироваться каждый день. Чем больше вы практикуетесь, тем больше вы учитесь и тем лучше становитесь.
Вы не можете освоить программирование ПЛК за один день. Но если вы постоянно прикладываете усилия и ежедневно практикуетесь, никто не сможет помешать вам овладеть программированием ПЛК.
Следуйте всем основным принципам в руководстве, которое я опубликовал на DipsLab.com.
Я продолжаю добавлять в этот список новые обучающие программы.
Начать создание небольшого проекта.
Работа над практическими проектами автоматизации ПЛК во многом поможет вам:
- Это поможет вам изучить и реализовать все те основы, которые вы усвоили во время изучения различных руководств по ПЛК.
- Получите настоящие практические знания.
- Это поможет вам составить свое портфолио, проявить себя как опытного программиста ПЛК и продемонстрировать свои навыки программирования ПЛК.
Я принял вызов и усвоил его на собственном горьком опыте.
Сможете ли вы?
Если у вас есть какие-либо вопросы или трудности с началом или изучением программирования ПЛК, напишите мне в разделе комментариев. Я сделаю все возможное, чтобы помочь тебе.
Готовность к тесту:
Если вы готовы к онлайн-тестированию, вот тест по автоматизации ПЛК.
Удачного программирования ПЛК!
Если вы цените то, что я делаю здесь, в DipsLab, вам следует принять во внимание:
DipsLab – это самый быстрорастущий и пользующийся наибольшим доверием сайт сообщества инженеров по электротехнике и электронике. Все опубликованные статьи доступны БЕСПЛАТНО всем.
Если вам нравится то, что вы читаете, пожалуйста, купите мне кофе (или 2) в знак признательности.
Это поможет мне продолжать оказывать услуги и оплачивать счета.
Я благодарен за вашу бесконечную поддержку.
Я получил степень магистра в области электроэнергетики. Я работаю и пишу технические руководства по ПЛК, программированию MATLAB и электрике на портале DipsLab.com.
Я счастлив, поделившись своими знаниями в этом блоге. А иногда вникаю в программирование на Python.
Как научиться программировать ПЛК? | by AmyPA
Изображение предоставлено: maxrevonline.com
Программируемые логические контроллеры используются во многих областях, особенно на заводах, где большая часть работы автоматизирована.ПЛК будет полностью контролировать то, что делает машина, но, конечно, сначала его нужно запрограммировать, чтобы понять, что он должен делать. Для многих инженеров это означает пройти дорогостоящий и трудоемкий курс, чтобы понять, как работает конкретный ПЛК, который вы хотите использовать. Трехдневный курс может стоить несколько сотен долларов.
Конечно, можно научиться основам программирования ПЛК. Но вот в чем дело: вы должны работать. Как и чему-то научиться, если вы не приложите усилий, вы не получите необходимых навыков.Итак, если вы хотите изучить программирование на языке ПЛК или программирование раскадровки, вы можете сделать это несколькими способами:
Ниже приведены некоторые маршруты, которые вы можете выбрать, если хотите изучить программирование ПЛК в свободное время:
- Читать книгу; не всегда лучший метод, но это способ, которым вы можете подойти к этому. Есть несколько книг, которые научат вас нужным навыкам с нуля. Часто лучше взять книгу и использовать то, что вы узнали из нее, в сочетании с методами, перечисленными ниже.
- Пройдите онлайн-курс обучения в признанной компании. Есть много компаний, которые предоставляют вам видео-обучение работе с конкретными ПЛК, а также общие курсы программирования. Большинство из них дает вам доступ к репетитору, и вы можете многому научиться по своему собственному курсу. Однако многие из этих курсов могут быть такими же дорогими, как курсы обучения на месте, которые предлагают многие другие компании. Однако вы можете выбирать, когда и где проводить тренировки.
- Используйте обучающие онлайн-видео на таких сайтах, как Udemy и даже YouTube.В Интернете доступно множество сайтов общего обучения, одним из самых известных является Udemy. Предлагаемые курсы сильно различаются по эффективности и не всегда написаны самыми опытными людьми в своей области. Некоторые предложат полностью обучить вас всего за день, в то время как другие предложат десятки видеороликов, которые вы можете просмотреть в течение определенного периода времени. Поэтому всегда важно читать отзывы о любом курсе, который вы собираетесь использовать. Затраты обычно намного ниже, чем у более профессиональных компаний, с которыми они конкурируют.
- Воспользуйтесь симулятором; независимо от того, какой путь вы выберете, чтобы получить свои знания, лучше всего вы научитесь, если попробуете его. Есть много онлайн-симуляторов ПЛК, к которым вы можете получить доступ, и у многих поставщиков ПЛК есть один, который вы можете использовать.
Хотите узнать самое лучшее? Вы часто можете получить много бесплатной помощи и обучения в Интернете, которые помогут вам понять, как программировать ПЛК. Однако, прежде чем вы сразу же начнете играть с живыми машинами на своей фабрике, вам нужно учесть несколько вещей.Как сказал один из пользователей PLCTalk:
«Некоторые, похоже, относятся к ПЛК как к игрушкам, с которыми можно играть и экспериментировать. Люди, не имеющие никакого опыта в области электротехники или инженерии, занимаются программированием, как если бы они программировали персональный компьютер. И не только это – некоторые даже не готовы читать руководство, а если и читают, то для них все это по-голландски, и поэтому они приезжают сюда, желая сразу погрузиться в живую работающую машину и что-то изменить. Они не хотят тратить время на руководство, и на их столе сидит ПЛК, тренируясь с ним! »
Помните, что многие из этих машин и способ их работы могут быть опасными для окружающих.Итак, если вы не знаете наверняка, что делаете; не делай этого и попроси помощи у службы «Сделай мою домашнюю работу по программированию».
5 лучших + бесплатных онлайн-курсов и курсов по программированию ПЛК [2019] [Обновлено ноябрь 2021 г.]
Программирование ПЛК помогает разрабатывать и настраивать управляющие приложения в промышленных условиях в соответствии с потребностями клиентов. А поскольку промышленная автоматизация растет с каждым годом, неудивительно, что поисковые запросы, такие как «обучение ПЛК в Интернете», «курсы программирования ПЛК» и «классы программирования ПЛК», также в последнее время взлетели до небес. раз. Наша команда из 30 экспертов составила список лучших и лучших курсов и классов по программированию ПЛК. Некоторые из этих тренингов по программированию ПЛК проводятся онлайн, тогда как другие преподаются офлайн.5 лучших онлайн-курсов и классов по обучению PLC [Обновлено 2020]
- Изучите 5 ПЛК за день – AB, Siemens, Schneider, Omron и Delta
- Программирование ПЛК с нуля – PLC1 (Udemy)
- Программа сертификата технического специалиста по программируемым логическим контроллерам, Колледж Джорджа Брауна
- Изучение лестничной логики ПЛК на LinkedIn Learning (БЕСПЛАТНО)
- Практическое программирование ПЛК – ПЛК II (Udemy)
| Способ доставки | Видео по запросу (онлайн) |
| Продолжительность | 26 часов |
| Уровень | Ученик |
| Бесплатно / платно | Платный |
Этот курс программирования ПЛК, предоставляемый в виде видеолекций по запросу, был создан экспертом Полом Линном, который имеет большой опыт в реализации проектов ПЛК стоимостью от 10 тыс. До 40 млн долларов.Это онлайн-обучение по ПЛК предоставляет доступ к программному обеспечению Rockwell RSLogix500 и Factory Talk View Studio, которые позволяют существенно изучить общие элементы управления, программирование релейной логики и многое другое. В дополнение к этому студенты также смогут получить представление об основных методах контроля, включая контроль уровня, контроль насоса, контроль HOA и многое другое. Руководствуясь основной целью изучения программирования ПЛК и работы со стандартным HMI. Благодаря этому учебному курсу PLC студенты получат доступ к 9 статьям и 19 другим ресурсам, которые можно загрузить . Снимок программирования ПЛК с нуля – PLC1 (Udemy)
| Способ доставки | Видео по запросу (онлайн) |
| Продолжительность | 10 часов |
| Уровень | Новичок |
| Бесплатно / платно | Платный |
Курс программирования PLC был разработан колледжем Джорджа Брауна, который специализируется на техническом обучении.Этот учебный модуль по программированию ПЛК предоставляет знания и технические навыки для работы с различными ПЛК. Программа включает обучение с помощью PLCLogix 500, моделирующего контроллеры Rockwell Logix 500. Эта программа для самостоятельного обучения позволяет студенту изучать качественный программный материал, который разделен на 19 различных модулей, состоящих из текста, анимации, аудиолекций и многого другого. Благодаря более чем 250 готовым лабораторным проектам и 10 интерактивным 3D-анимациям, PLCLogix 500 позволяет учащимся эмулировать различные приложения. Снимок программы сертификации специалистов по программируемым логическим контроллерам, Колледж Джорджа Брауна
| Способ доставки | Видео по запросу (онлайн) |
| Уровень | Продвинутый |
| Бесплатно / платно | Платный |
В рамках этого онлайн-курса программирования ПЛК инструктор Захра Халил изучает основы программирования релейной логики, языка, который чаще всего используется в автоматизации.Курс предназначен для начинающих, и преподаватель проявляет особую осторожность, охватывая все основные понятия, такие как операции с цепочкой, инструкции по таймеру и счету и т. Д. Инструктор также рассматривает примеры из реальной жизни с тематическими исследованиями. Этот онлайн-курс программирования ПЛК (который представляет собой видеолекцию по запросу) разбит на 5 модулей, поэтому общее время просмотра составляет чуть более 2 часов. В этом курсе программирования ПЛК уже обучаются более 12500 студентов, поэтому он обязательно станет одним из лучших доступных онлайн-курсов по бесплатному обучению ПЛК. Снимок обучающей релейной логики ПЛК в LinkedIn Learning (БЕСПЛАТНО)
| Способ доставки | Видео по запросу (онлайн) |
| Продолжительность | 2 часа 4 минуты |
| Уровень | Новичок |
| Комиссия | БЕСПЛАТНО |
Учебный курс PLC , созданный экспертом Полом Линном, ориентирован на учебные цели студентов, которые хотят получить практические знания в области приложений релейной логики.Этот курс следует из уровня обучения PLC I, поэтому студенты, обладающие знаниями RSLogix500, могут легко записаться на этот курс. Обучающие видеоролики позволяют студенту изучить внутренние спецификации программы и уметь писать ее с нуля. Для студентов, достигших среднего уровня в создании лестничной логики, этот курс считается одним из самых популярных для практического обучения. Имея до 6 статей и 29 загружаемых ресурсов, доступных для доступа, студенты могут максимально использовать свои усилия и время, пройдя курс обучения программируемому логическому контроллеру .Получите самые точные инструкции для выработки практических решений. Снимок практического программирования ПЛК – ПЛК II (Udemy)
| Способ доставки | Видео по запросу (онлайн) |
| Продолжительность | 8 часов |
| Уровень | Средний |
| Бесплатно / платно | Платный |
Обучение программированию ПЛК Отзыв от 30 экспертов по программированию ПЛК 4.6
Лучшие курсы по программируемым логическим контроллерам
Вы очень заинтересованы в изучении новых языков программирования? Вы ориентируетесь на детали, как аналитик, и любите промышленную автоматизацию? Если это так, то работа инженером по программируемым логическим контроллерам (ПЛК) может быть для вас подходящей работой.
Найди свой матч на тренировочном лагере
- Карьера Карма подойдет вам с лучшими техническими учебными курсами
- Получите эксклюзивные стипендии и подготовительные курсы
Найди свой матч на тренировочном лагере
- Карьера Карма подойдет вам с лучшими техническими учебными курсами
- Получите эксклюзивные стипендии и подготовительные курсы
Программирование, не путать с кодированием, является первостепенным навыком для инженеров ПЛК.Перед тем, как приступить к работе, вам нужно выучить пять языков. Мы рассмотрим это и многое другое ниже, чтобы помочь вам стать успешным инженером по ПЛК.
Что такое программируемый логический контроллер или ПЛК?
Программируемый логический контроллер – это промышленный компьютер, который управляет другими системами, выступая в качестве центрального концентратора. Они сильно отличаются от обычных офисных компьютеров и рассчитаны на надежную работу в суровых условиях. Эти машины могут выдерживать такие вещи, как частые вибрации или экстремальные температуры.
Пять разных языков программирования вводятся через центральный процессор для управления этой сложной системой. Из более чем 700 языков программирования, которые вы можете изучить, очень немногие владеют этими пятью языками. Получив правильное образование, вы наверняка будете пользоваться большим спросом.
Эти цифровые компьютеры часто используются на производственных линиях. Они являются «мозгом» системы, контролируют входы и выходы, а также управляют машинами и автоматизированными процессами.
Одним из примеров ПЛК является стойка ПЛК Allen-Bradley, которая включает в себя центральный процессор, а также устройство программирования для управления промышленной автоматизацией.
Для чего используется ПЛК?
Хотите верьте, хотите нет, но эти компьютеры существуют с середины 60-х годов. С тех пор они были опорой в обрабатывающей и производственной отраслях. Ниже приведены пять областей, в которых можно найти ПЛК.
- Работа ветряной турбины. Эти контроллеры эффективно используются в ветряных турбинах, предоставляя точные и актуальные данные, а также помогая отслеживать такие вещи, как время простоя.
- Производство цемента. Это еще одна отрасль, в которой широко используются системы управления. В производстве цемента ПЛК регулируют смешивание сырья и анализируют качество конечного продукта.
- Умная фабрика. Инициативы Smart Factory включают интеллектуальную автоматизацию, передовую робототехнику и использование Интернета вещей (IoT).Даже в условиях быстрых технологических изменений ПЛК продолжают играть важную роль в качестве центрального процессора для принятия решений в реальном времени на производстве.
Эти компьютеры отправляют широкий спектр подробных данных, которые можно интегрировать с облачными вычислениями для выполнения таких задач, как планирование заданий, обработка логистики и связь с поставщиками.
- Производство стекла. В этой отрасли также используются ПЛК. Они используются во многих задачах и производственных процессах, таких как контроль соотношения материалов, обработка плоских стекол и т. Д.
- Виртуальное моделирование. Система виртуального моделирования полезна для руководителя завода, которому необходимо перестроить производственную линию. Когда двухмерных спецификаций недостаточно, может пригодиться более сложное моделирование. Вот где могут помочь ПЛК.
Пять типов языков программирования ПЛК
Если ПЛК – новая концепция для вас, возможно, изучение одного или двух из наиболее распространенных языков программирования станет хорошим первым шагом. Ниже приведены пять наиболее часто используемых языков программирования ПЛК.
81% участников заявили, что они почувствовали себя более уверенными в своих перспективах трудоустройства в сфере высоких технологий после посещения учебного лагеря. Попадите на буткемп сегодня.
Найдите свой матч на учебном лагереСредний выпускник учебного лагеря потратил менее шести месяцев на переходную карьеру, от начала учебного лагеря до поиска своей первой работы.
Начните карьеру сегодняПоследовательные функциональные схемы (SFC)
Те, кто знаком с блок-схемами, могут быстрее ознакомиться с этим языком программирования.Однако у SFC может быть больше ветвей, чем вы привыкли. Этот язык использует множество шагов и переходов для получения правильного результата.
Каждый, кто хочет стать разработчиком или программистом полного стека, уже знает этот язык. Или те, кто знает блок-схемы, могут легче ознакомиться с этим языком программирования. Однако у SFC может быть больше ветвей, чем вы привыкли.
Этот язык использует множество шагов и переходов с двоичными условиями для получения правильного результата.Решения на этом языке основаны на сроках, фазах и даже физическом состоянии оборудования.
Лестничная диаграмма (LD)
Этот тип языка программирования ПЛК отличается от любого кода, который вы могли бы изучить для своего компьютера. Язык использует лестничные диаграммы, чтобы показать логические отношения. Эта релейная логика частично опирается на такие компоненты, как физико-механические реле и переключатели. Новый метод лестничных диаграмм используется для запуска приложений промышленной автоматизации.
Структурированный текст (ST)
Третий язык называется структурированным текстом.Этот язык высокого уровня напоминает Паскаль, «C» и Visual Basic. Он поддерживает сложные операторы и вложенные инструкции, что особенно полезно в промышленности.
Функциональная блок-схема (FBD)
Этот язык программирования ПЛК ориентирован на графический интерфейс. Его макет отображает входы и выходы в блоках, соединенных линиями связи. Инженер запрограммирует функциональные блоки для работы ПЛК. Этот тип системы отлично подходит для повторяющихся задач, таких как циклы, таймеры и счетчики.
Список инструкций (IL)
Последний язык ПЛК – это список команд. Подобно структурированному тексту, этот язык ассемблера также основан на тексте. Он написан с использованием мнемонических кодов, таких как «или», «и» и «загрузка». Это отлично подходит для компактных и требовательных ко времени приложений.
Найди свой матч на тренировочном лагере
- Карьера Карма подойдет вам с лучшими техническими учебными курсами
- Получите эксклюзивные стипендии и подготовительные курсы
Изучение языков программирования ПЛК
Познакомьтесь с языком программирования ПЛК и наблюдайте, как растут ваши карьерные возможности.После того, как вы выпили «Ага!» момент и решите, что это ваш карьерный путь, оцените свои текущие навыки, чтобы определить, нужен ли вам базовый курс повышения квалификации по программированию. Затем приступайте к изучению пяти языков, описанных выше. Не волнуйтесь, некоторые из самых простых для изучения языков программирования включают только что упомянутые.
Сколько времени нужно, чтобы выучить языки ПЛК?
Ваш опыт, уровень опыта в программировании и наиболее удобное вам приложение определят время, необходимое для изучения языка ПЛК.
В идеальном мире вы должны изучить все пять языков программирования. Так что будьте спокойны, изучайте по одному и в полной мере используйте ресурсы, которые мы упоминаем ниже.
Как познакомиться с ПЛК: шаг за шагом
Допустим, вы новичок, но идея изучения языка программирования для ПЛК вас привлекает. Во-первых, поздравляем вас с выбором пути, который улучшит ваши технические навыки и откроет для вас множество возможностей трудоустройства.
Далее ниже приводится базовое руководство, которое поможет вам встать на правильный путь.Прежде чем вы это узнаете, вы станете экспертом по ПЛК.
- Начните с базового понимания. Типичный покупатель, ищущий ноутбук в Интернете, сначала изучит технические характеристики, верно? Точно так же вы должны проводить исследования, изучая программирование. Например, прочтите, что такое язык программирования, и приступайте к делу.
- баловаться. Как вы узнаете, нравится ли вам эта область, если не попробуете ее? Просмотрите различные ресурсы, чтобы узнать, какие существуют типы языков.В разделе выше мы упоминаем, насколько похожи могут быть некоторые из этих языков. Почему бы не попробовать Java для начинающих, чтобы понять, как структурировать код и инструкции?
- Большая картина. Не останавливайтесь только на изучении языков программирования. Получите целостное представление о работе и необходимых навыках, изучив некоторые из доступных инженерных направлений и рабочих мест. Вы можете стать и инженером, и программистом ПЛК. Добейтесь карьерного роста, выполняя дополнительную работу.
- Записаться на курс. Теперь вы знаете, что нужно, чтобы стать программистом или инженером ПЛК. Следующий шаг – присоединиться к онлайн-курсу или в классе, чтобы узнать, как это делают эксперты. Это также может помочь вам применить некоторые практические знания в своем образовании.
- Пройдите сертификацию. Спрос на вакансии инженера и программиста. Однако у сертифицированного специалиста больше шансов получить работу своей мечты.
Лучшие курсы обучения и сертификации PLC
С языками программирования PLC в вашем распоряжении будет много возможностей для карьерного роста.Многие работодатели и организации ищут тех, кто знает о ПЛК и их различных языках. Ниже приведены дополнительные ресурсы, которые помогут вам в достижении этой цели, в зависимости от вашего образа жизни и предпочтений в обучении.
Лучшие классы персонального ПЛК
Если у вас есть время, мы настоятельно рекомендуем вам учиться, сидя в классе или посещая виртуальный класс под руководством инструктора. Вы не только поучитесь у некоторых из ведущих экспертов отрасли, но также сможете увидеть и поработать над реальными контроллерами.Это поможет вам как с теоретическими, так и с практическими знаниями. Несколько таких классов включены ниже.
Программируемые логические контроллеры – квалификация EAL уровня 3
- Метод обучения : Личное, под руководством инструктора
- Время: 10 дней
- Даты : Зависит от местоположения. 23 ноября – 28 июня
- Необходимые условия: Нет
- Стоимость: 2000 долларов США, включая НДС
Этот 10-дневный очный курс обучения аккредитован City & Guilds.К концу курса у вас будет награда EAL уровня 3 в PLC, а также сертификат City & Guilds.
Обширное обучение включает в себя инструкции по эксплуатации некоторых из более чем 20 машин с ПЛК, в том числе от Allen Bradley, Siemens и Mitsubishi. Курс на 90 процентов состоит из практических занятий и на 10 процентов из теории. Примечания и USB-накопитель с учебными материалами предоставляются в конце курса.
Лучшие курсы онлайн-обучения и сертификации по ПЛК
Второй вариант – пройти одни из лучших доступных онлайн-курсов.С их помощью вы узнаете, как работать с некоторыми из самых популярных систем ПЛК.
«Карьера Карма вошла в мою жизнь, когда я больше всего в ней нуждалась, и быстро помогла мне пройти курс обучения. Через два месяца после выпуска я нашел работу своей мечты, которая соответствовала моим ценностям и целям в жизни!»
Венера, инженер-программист Rockbot
Найдите свой матч на учебном лагереИзучите 5 ПЛК за день – Allen Bradley, Siemens, Schneider, Omron & Delta
- Метод обучения : Интернет-ресурсы для самостоятельного обучения
- Поставщик: Udemy
- Время: 26 часов для 20 статей и 50 загружаемых ресурсов
- Даты : Полный доступ
- Предварительные требования : Нет
- Стоимость: Стоимость со скидкой 12 долларов (обычная цена 40 долларов) до конца ноября 2020 г.
Этот курс предназначен для программистов, инженеров и техников.Помимо знания того, как подключать и подключать ПЛК, важно научиться их программировать. Изучение всего этого поможет вам эффективно устранять неполадки. В этом видео-курсе вы узнаете о принципиальных схемах, программировании ПЛК для любого проекта, промышленного применения, а также систем домашней и производственной автоматизации.
Эти записанные в реальном времени сеансы доступны в любое время. Но поспешите и запишитесь по этой сниженной цене.
Обучение работе с ПЛК Allen Bradley – RSLogix 5000 Series
- Метод обучения : Интернет-ресурсы для самостоятельного обучения
- Провайдер : Udemy
- Время: 21.5 часов
- Даты: Пожизненный доступ
- Предварительные требования: Нет
- Стоимость: $ 30
После завершения этого онлайн-курса вы сможете настроить и запрограммировать Rockwell Automation в RSLogix 5000 и Studio 5000. Этот курс предназначен для тех, кто знаком с ПЛК, но хочет узнать о различных системах
Лучшие бесплатные курсы PLC
Наш следующий вариант для вас – бесплатные курсы, доступные от нескольких провайдеров.Они варьируются от начального до среднего уровня.
Бесплатное обучение ПЛК: обучение программированию ПЛК в Интернете
- Метод обучения : Различные онлайн-видео и статьи
- Поставщик: PLC Academy
- Даты : Н / Д
- Предварительные требования: Нет
- Стоимость: БЕСПЛАТНО
Этот сайт посвящен обучить программированию ПЛК. Они предлагают много бесплатных ресурсов, так что воспользуйтесь преимуществами.
Обучение специалистов по ПЛК
- Метод обучения : Онлайн-видео
- Поставщик: Колледж Джорджа Брауна
- Даты : Различаются
- Предварительные требования: Нет
- Стоимость: Различается
Это еще один полезный ресурс, предоставленный Джорджем Brown College и включает в себя как бесплатные, так и платные курсы. Есть онлайн-видео, к которым вы можете получить доступ бесплатно, а также сертифицированные зарегистрированные учебные программы.На некоторых курсах применяется модель оплаты по мере обучения, согласно которой вы платите только за те курсы, которые вы посещаете.
Лучшие книги по ПЛК
Книги по этой теме есть везде. Так что вложите в текст или два, чтобы отдохнуть от экрана или почитать перед сном. Ознакомьтесь с несколькими вариантами ниже.
Введение в ПЛК: руководство по программируемой логике для начинающих, Элвин Перес АдроверПри изучении нового предмета всегда рекомендуется начинать с основ.И эта книга научит вас именно этому. Прочтите это, чтобы узнать, как ПЛК играют важную роль в системах промышленной автоматизации.
Программируемые логические контроллеры, У. Болтон (2009)Это подробное руководство по ПЛК включает уроки по электрике, контроллерам и датчикам температуры. Что такое исполнительные механизмы и датчики? Узнай здесь. Включены обширные примеры и практические задачи, чтобы подготовить вас к реальной жизни.
Лучшие онлайн-ресурсы по ПЛК
После того, как вы ознакомитесь с этой увлекательной темой, перейдите к любому из этих онлайн-ресурсов ниже для более глубокого понимания.Оставайтесь на связи с сообществом PLC через форумы, бесплатные дискуссионные группы и сообщества компаний.
Quora.com
Эта популярная бесплатная обучающая платформа предлагает важную информацию и образовательные ресурсы как учащимся, так и сотрудникам. Задайте вопрос или просмотрите список ответов по различным темам о ПЛК. И обсудите ваши вопросы с экспертами со всего мира.
ScienceDirect.com
ScienceDirect – отличный ресурс, где вы можете искать темы PLC по ключевым словам, именам авторов, названиям книг и томам.Изучите предоставленную информацию в удобном для вас темпе. Хорошая идея – зарегистрироваться, чтобы быть в курсе новостей PLC.
