
Как подключить энкодер к частотному преобразователю. Схема
Энкодер для частотника по своему внешнему виду похож на переменный резистор или на потенциометр. Те же три вывода, тот же корпус панели. На этом его сходство заканчивается. Внутри у него два переключателя, у которых есть общий вывод задач управления и два своих.
Чтобы энкодер заработал, средний вывод нужно подключить к земле, а два остальных через резисторы к питанию. Съем сигнала управления нужно производить непосредственно с выводов панели энкодера.
Теперь представим, что энкодер идеальный и его контакты не страдают дребезгом. Подключим к выводам энкодера осциллограф и начнем вращать ручку энкодера. Импульсы будут сдвинуты относительно друг друга на 90 градусов. Если крутить ручку мощности (кВт) вправо, влево или назад, то будем иметь последовательности панели управления:
Если осциллограммы как применение последовательности задач логических нулей и единиц, то они будут иметь такой вид:
Возьмем обычный энкодер, у которого есть дребезг контактов. Зона дребезга:
Зона дребезга:
При переключении с логической единицы на логический ноль возникает дребезг. С дребезгом можно бороться двумя способами: аппаратным и программным применением.
Аппаратный способ – это подключение серии конденсаторов частотника, триггеров Шмитта, как указано на схеме панели управления:
Рекомендуется применять метод борьбы с дребезгом – программный. Такой метод описан в библиотеке Ротери. Данная библиотека содержит несколько функций, которые нужны для настройки выводов векторного контроллера на ввод, и подключение подтягивающих мощность (кВт) резисторов. В библиотеке нужно указывать соответствующие команды и задачи. Данной командой включается подтягивающий резистор внутри контроллера панели частотника.
Функция серии Get position vfd возвращает значение энкодера. Данная фукнция нужна для получения количества импульсов, которые считал энкодер. Функция set Position vfd нужна для загрузки значения, с которого энкодер начнет свой счет.
Функция tick должна быть рассмотрена подробнее.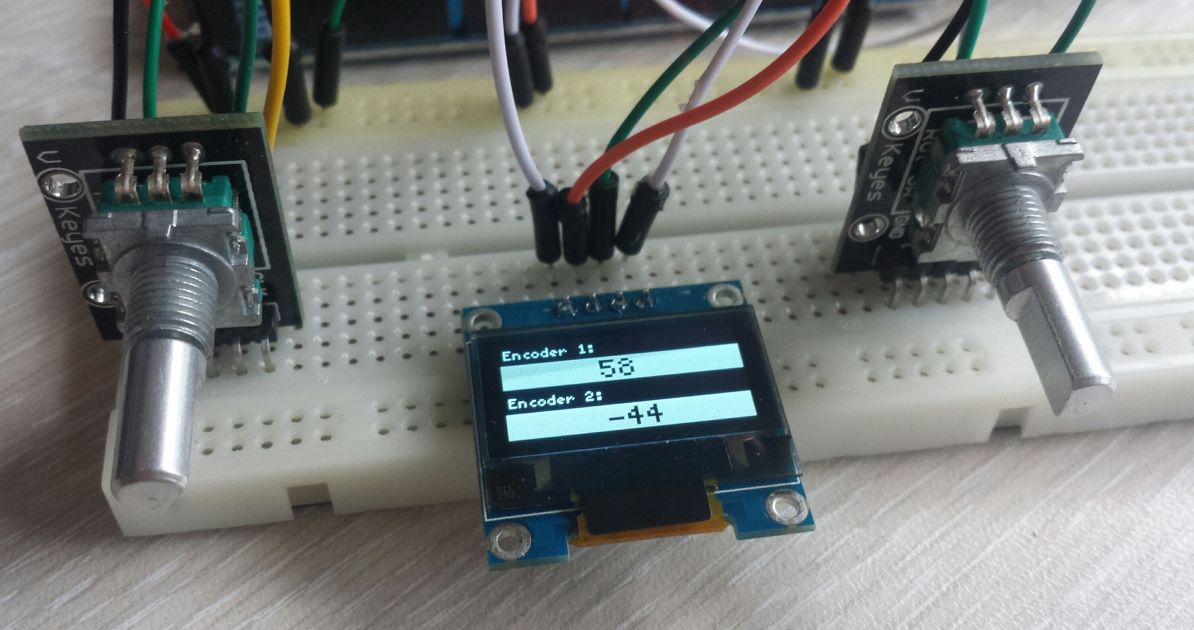 Переменные этой функции sig1 и sig2 записывают состояние векторного pin, к которой подключен энкодер. Дальше эти pin записываются в переменную thisState vfd, которая является текущим состоянием энкодера. Если текущее состояние энкодера не равно предыдущему, то вычисляются новые направления счета и количество импульсов мощности сохраняется в переменной Position. Когда энкодер вернется в свое начальное векторное положение, произойдет сдвиг вправо на два разряда, и новое значение управления нужно записать в переменную PositionExt. Данная переменная нужна для сохранения серии результатов задач, которые будут иметь применение в основной программе.
Переменные этой функции sig1 и sig2 записывают состояние векторного pin, к которой подключен энкодер. Дальше эти pin записываются в переменную thisState vfd, которая является текущим состоянием энкодера. Если текущее состояние энкодера не равно предыдущему, то вычисляются новые направления счета и количество импульсов мощности сохраняется в переменной Position. Когда энкодер вернется в свое начальное векторное положение, произойдет сдвиг вправо на два разряда, и новое значение управления нужно записать в переменную PositionExt. Данная переменная нужна для сохранения серии результатов задач, которые будут иметь применение в основной программе.
Счет
Проанализировав состояние энкодера при вращении влево и вправо, составляем таблицу:
Его начальное положение 1-1. При повороте вправо произошел щелчок, единица стала логическим нулем. Новое значение this State vfd равно 01. Согласно команды данный результат суммируется со значением переменной Position.
Из-за того, что произошел дребезг, позиция стала 11, после перерасчета порядковый номер стал 7.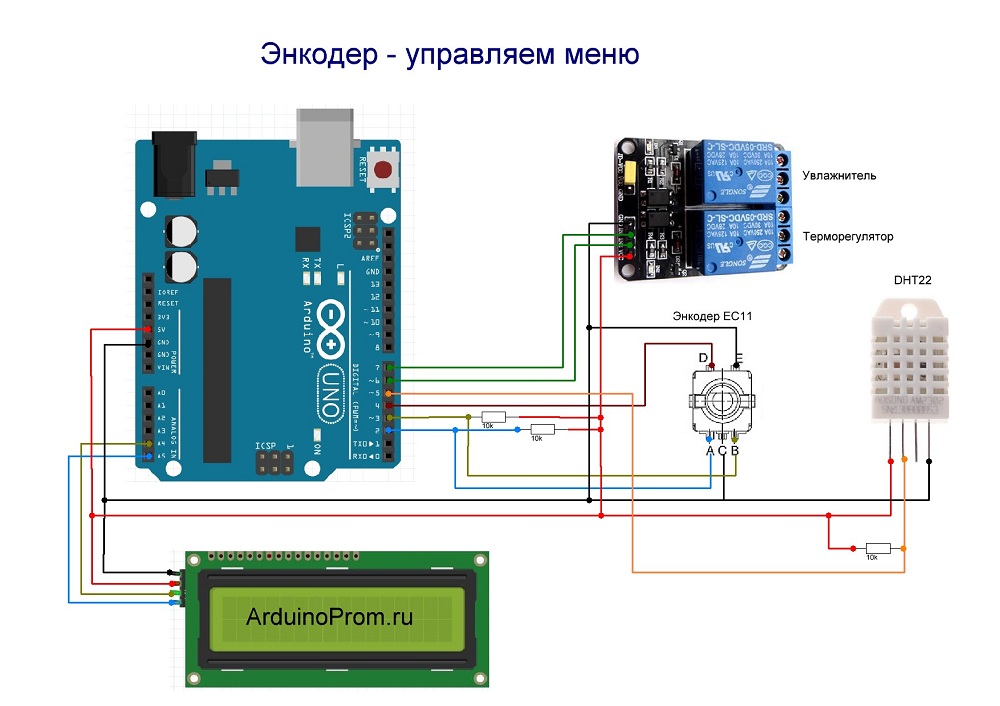 После того, как дребезг закончился, нужно фиксировать новое положение 01 и к предыдущему нулю добавляется единица. При повороте энкодера произошел один щелчок, и значение переменной Position стало единицей.
После того, как дребезг закончился, нужно фиксировать новое положение 01 и к предыдущему нулю добавляется единица. При повороте энкодера произошел один щелчок, и значение переменной Position стало единицей.
Происходит второй щелчок при повороте энкодера направо, и вместо позиции 01 мы имеем позицию 00. После того, как весь дребезг закончится, на выходе управления также имеем значение единицы. При четвертом щелчке, когда позиция с 10 стала 11, мы имеем значение 6. После окончания дребезга остается 6.
В некоторых энкодерах имеет применение кнопка панели. При ее нажатии и отпускании тоже будет дребезг контактов, нужно применить библиотеку Bounce. Функции этой библиотеки нужны для задания pin, к которому будет подключена кнопка, задач времени задержки в миллисекундах. Если произошло нажатие на кнопку, то функция мощности (кВт) возвращает векторное значение true, если нет, то false vfd.
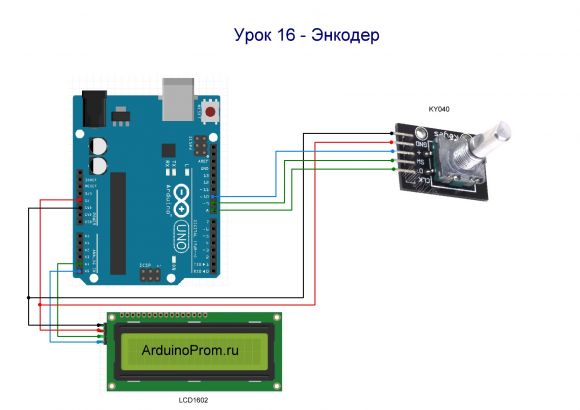
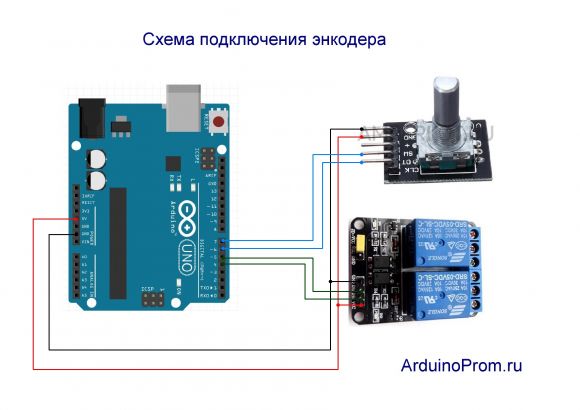
Принципиальная схема подключения энкодера к преобразователю частоты
Данная схема состоит из платы Arduino Uno, инкрементального энкодера, четырехразрядного светодиодного индикатора, ключевых транзисторов и ограничительного резистора.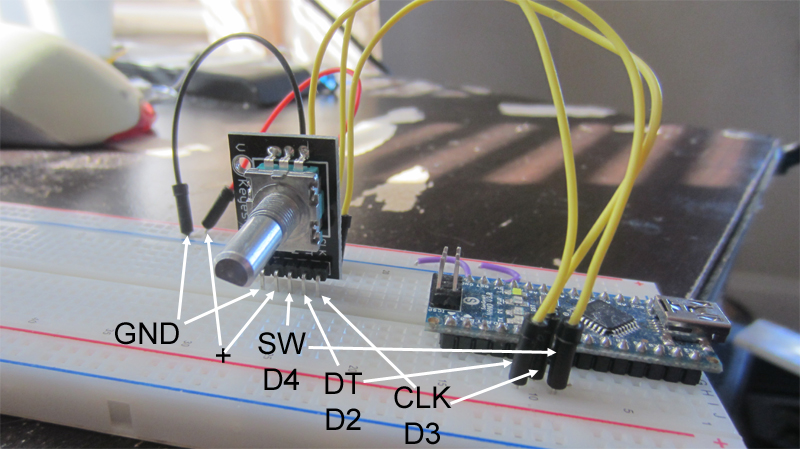 Эта схема называется счетчиком импульсов. Она считает импульсы, которые будет воспроизводить энкодер при его вращении. Энкодер своими выводами подключен к каналам А2 и А3, вывод кнопки подключен к выводу А4, средний вывод подключен к земле, второй вывод тоже к земле.
Эта схема называется счетчиком импульсов. Она считает импульсы, которые будет воспроизводить энкодер при его вращении. Энкодер своими выводами подключен к каналам А2 и А3, вывод кнопки подключен к выводу А4, средний вывод подключен к земле, второй вывод тоже к земле.
Рассмотрим скетч, который называется счетчиком импульсов энкодера управления частотника. Вначале подключаем библиотеки для работы таймера, индикатора LS, для работы с энкодером, для кнопки.
Перейдем к макетной плате, и зальем все это в контроллер управления частотника. После заливания, включаем, крутим регулятор энкодера, цифры на экране возрастают. В обратную сторону векторного значения уменьшаются и переходят в отрицательную сторону. При увеличении серии задач отрицательного значения знак минуса смещается.
Если нажимаем на кнопку индикатора, переменная обнулится, на индикаторе будет ноль.
Подключение энкодера промышленного назначения к Arduino
Наша задача суметь управлять скоростью асинхронного двигателя с помощью программы на компьютере. У нас имеется преобразователь частоты (частотник):
У нас имеется преобразователь частоты (частотник):
Для домашних заданий такая информация не нужна. На фотографии энкодер промышленного назначения для асинхронного двигателя управления мощностью (кВт) станков:
В станкостроении энкодеры широко применяются для преобразователей частоты асинхронных двигателей. Они монтируются как датчики обратной связи по своей скорости. Такие энкодеры имеют большую дискретность от 100 импульсов на оборот до 1 млн импульсов на оборот. У этой марки дискретность равна 500 имп. на оборот.
Энкодеры подразделяются на виды задач по принципу действия на частотные преобразователи. Они бывают абсолютными и инкрементальными. Наш энкодер выполняет обычную функцию – выдает сигнал дифференцирования при отключении мощности питания, и ее подачи снова. Раннее состояние не сохраняется.
Энкодеры абсолютного вида имеют внутреннюю память, которая помнит последние положения. Зачем нужна память, и зачем сохранять эти данные? В заводских условиях станкостроения перед перемещением определенного устройства в первую очередь указывают нулевую точку. Такой процесс называется реферированием, то есть, выход в нуль.
Такой процесс называется реферированием, то есть, выход в нуль.
Применение датчика абсолютного вида дает возможность уйти от этой процедуры на второй раз, сократить время при условии, что система имеет ограничения для перемещений.
Рассмотрим энкодеры синуса и косинуса. Они выдают выходной сигнал косинуса или синуса. Далее, с помощью устройства интерполятора мощности образуют из них импульсы. Сигналы такого вида можно изменять в размерах. Питание энкодера осуществляется от напряжения 5 вольт.
Сигнал «А» – это сигнал импульса прямого типа. Количество импульсов с этого сигнала приходит на каждом обороте. Оно равно 500 (дискретность датчика).
Сигнал «В» – тоже прямой сигнал импульса. С него на каждом обороте поступает число импульсов по дискретности датчика, который смещен от канала «А» на 90 градусов (500).
Сигнал «R» – это сигнал метки «нуль». С одного оборота датчика получается один импульс.
В энкодерах промышленного назначения используется сигнал дифференцирования, для работы с частотным преобразователем (частотником).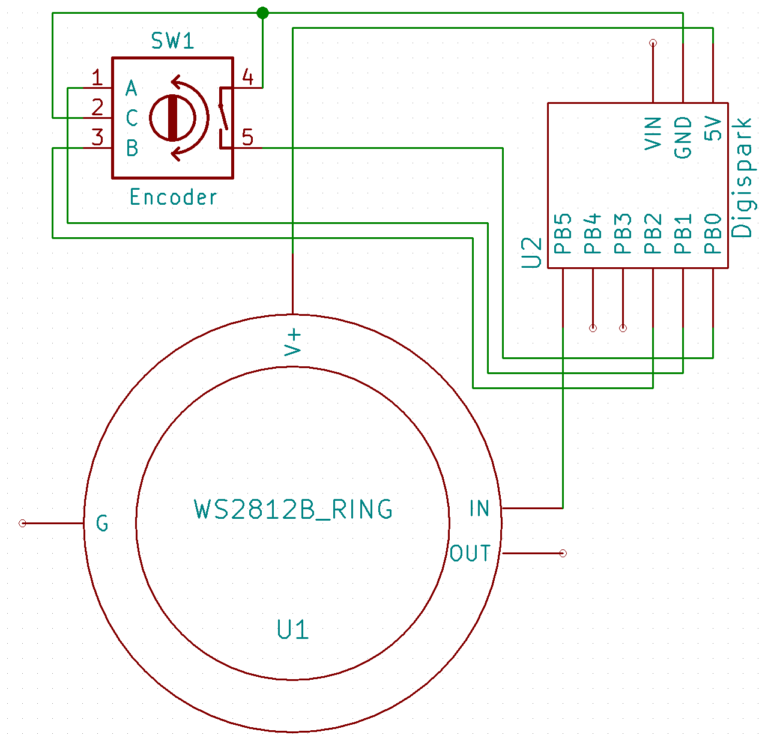 Название у него сложное, а на самом деле все просто. Все каналы отдельно копируются своей инверсией. Это необходимо для отдавания сигнала на значительные расстояния. Выходной канал энкодера подсоединяется к приемнику специального назначения, сделанному на усилителях операционного вида. Импульс в итоге определяется в совокупности двух сигналов.
Название у него сложное, а на самом деле все просто. Все каналы отдельно копируются своей инверсией. Это необходимо для отдавания сигнала на значительные расстояния. Выходной канал энкодера подсоединяется к приемнику специального назначения, сделанному на усилителях операционного вида. Импульс в итоге определяется в совокупности двух сигналов.
Подключение
Подключение простое. Подсоединяем напряжение 5 вольт на выходы энкодера. У нас раскладка: провод коричневого цвета – 0 В, белого цвета – +5 В, розовый, зеленый и красный – А, В, R.
Программа подключения энкодера базируется на прерываниях каналов А и В. Срабатывания прерываний происходят на переднем фронте. Получается ситуация, когда происходит торможение энкодера в момент растрового пересечения и выходной сигнал канала всегда остается положительным. Подсчет импульсов непрерывно ведется счетчиком.
В нашем случае мы не будем применять прерывания, потому что мы работаем с 4-мя датчиками, они эксплуатируются одновременно.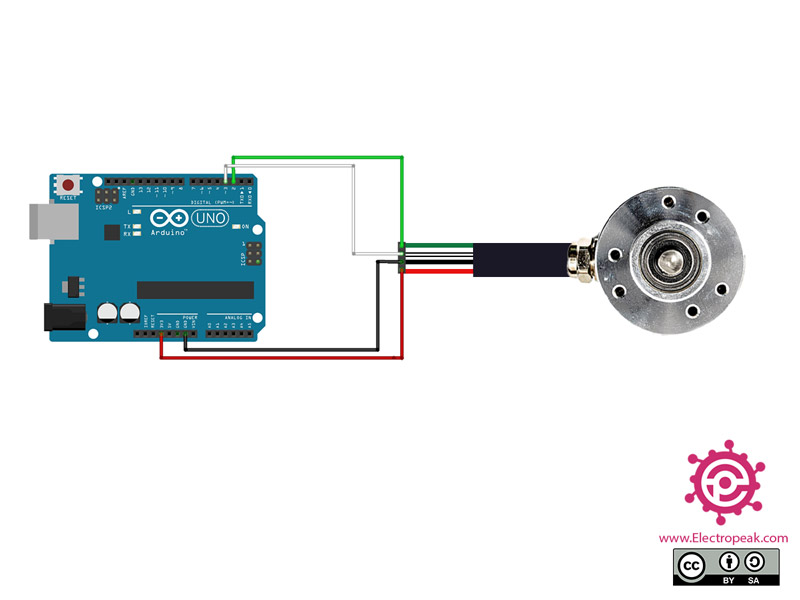 Если применять схему прерываний, наверняка возникнет ситуация потери импульсов. У нас эта проблема решается путем установления значка наличия движения. А мы рассматривали эксплуатацию энкодеров промышленного назначения.
Если применять схему прерываний, наверняка возникнет ситуация потери импульсов. У нас эта проблема решается путем установления значка наличия движения. А мы рассматривали эксплуатацию энкодеров промышленного назначения.
Работа счетчика импульсов на основе модуля энкодера
Счетчик работает в связке с модулем семиразрядного индикатора, который и будет отображать количество накрученных энкодером импульсов. При включении значение счетчика равно нулю.
Покрутим ручку энкодера по часовой стрелке. Значение счетчика инкрементируется на единицу при каждом щелчке энкодера. Наибольшее число можно накрутить 999999999. это число должно заполнить все разряды нашего семисегментного индикатора. Если вращать ручку дальше, то счетчик обнулится, начнет снова считать с нуля.
Для примера накрутим 120 импульсов. Теперь скручиваем обратно, вращая ручку против часовой стрелки. Центральная ось энкодера работает как кнопка. Она очищает от нулей свободные разряды индикатора. У кнопки есть небольшой дребезг контактов, поэтому выключение и включение происходит не сразу.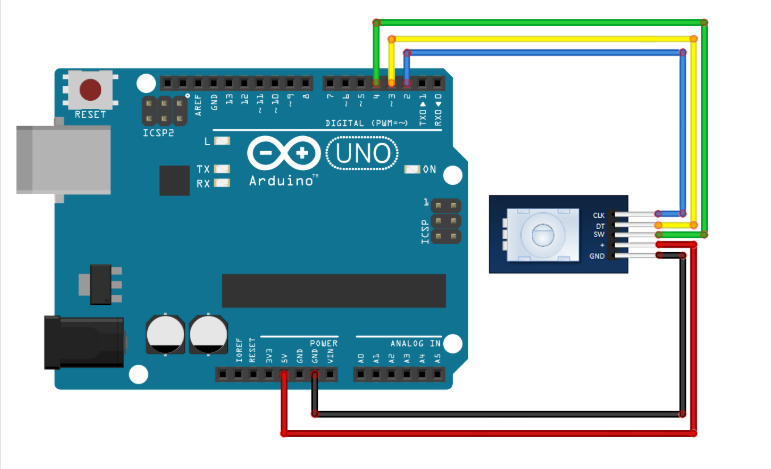 Программным путем, дребезг устраняется. Это основа работы с модулем энкодера.
Программным путем, дребезг устраняется. Это основа работы с модулем энкодера.
Подключение инкрементальный энкодера к avr
Смотрите это видео на YouTube
Энкодер подключение, настройка, программирование в
Дюссельдорф
Подключение энкодера
В зависимости от типа энкодера, он подключается либо напрямую к компьютеру, либо к специальному программатору с помощью интерфейса. С помощью чего проверяется работоспособность энкодера. В случае неисправности энкодера в большинстве случаев потребуется его замена. Энкодеры делятся на:
- Инкрементальный энкодер
- Абсолютный энкодер
- Энкодер с параллельным интерфейсом (встречается редко)
- Энкодер с последовательным интерфейсом (широко распространен)
Инкрементальные энкодеры бывают с цифровым или с аналоговыми сигналами. Отличие инкрементального энкодера от абсолютного заключается в том, что он при подаче питания не может определить свое положение (абсолютную позицию) в каком положении находится его вал.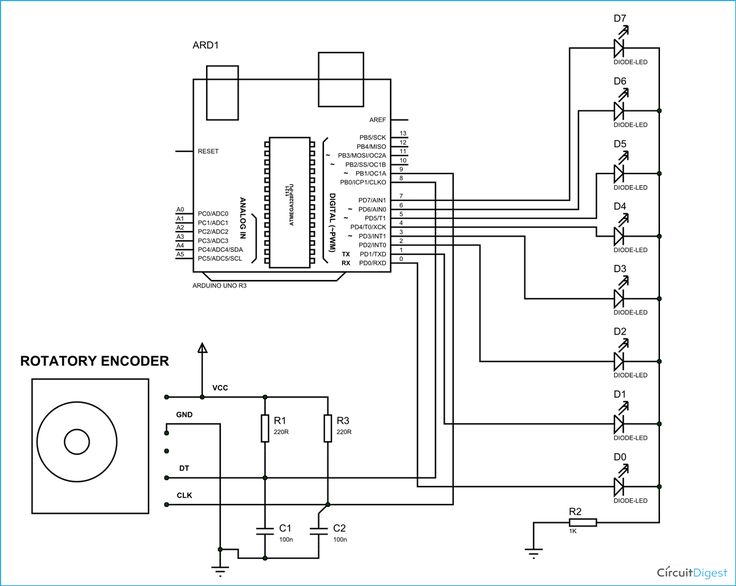
Программирование энкодера
Современные энкодеры внутри себя имеют микроконтроллер (процессор) все данные энкодера передаются по цифровому последовательному интерфейсу, наиболее распространённый RS485. В процессоре энкодера хранятся данные о двигателе, в котором этот датчик установлен (ток, напряжение, инерция, угол смещения ротора, индуктивности и естественно тип двигателя с серийным номером).
Именно поэтому новые энкодеры просто поставить на оборудование не получится, придется программировать. Программирование энкодера производится с помощью компьютера со специальным программным обеспечением либо с помощью программатора.
Настройка энкодера, юстировка
После программирования энкодера следует его настройка (юстировка). У каждого производителя Настройка энкодера, юстировка индивидуальная.
Самые распространенные производители энкодеров:
- Siemens
- Heidenhain
- Kubler
- Omron
- Sick
Также Настройка энкодера, юстировка будет зависеть от двигателя, на котором он установлен.
Проверка энкодера
По завершению всех вышеперечисленных процедур следует проверка энкодера на специальном стенде. Проверка работы с приводом как без нагрузки, так и с нагрузкой. В некоторых случаях проверка энкодера проводится с помощью компьютера и соответствующего софта.
Распиновка и схема энкодера
|
Распиновка энкодера |
Схема энкодера |
К кому обратиться?
Специализированный сервисный центр «Кернел» выполнит профессиональное подключение, настройку (юстировку) и программирование энкодеров в любых производителей в сжатые сроки и за разумные деньги.
Подключение, настройку и программирование энкодеров в производят квалифицированные специалисты с инженерным образованием.
Специалисты нашей компании за время ее существования произвели настройку и программирование более тысячи энкодеров выпущенных под разными брендами.
Мы уверенны в качестве выполненных работ и даем гарантию на все виды работ, включая настройку и программирование энкодера шесть месяцев.
Как с нами связаться
Вас заинтересовало предложение по подключению, настройке и программированию энкодеров в ? Задайте их нашим менеджерам. Связаться с ними вы можете несколькими способами:
- Заказав обратный звонок (кнопка в правом нижнем углу сайта)
- Посредством чата (кнопка расположена с левой стороны сайта)
- Либо позвонив по номеру: +7(8482) 79-78-54; +7(917) 121-53-01
- Написав на электронную почту: [email protected]
Вот далеко не полный список производителей промышленной электроники и оборудования, ремонтируемой в нашей компании.
-
Другие услуги по ремонту промышленной эелектроники и оборудования
- Ремонт экнодеров в сервисном центре
- Абсолютный и инкрементальный энкодеры
- Виды энкодеров
- Энкодер неисправности
- Ремонт энкодера
- Энкодер – подключение, настройка, программирование
- Ремонт энкодеров YASKAWA, настройка
- Ремонт энкодеров SICK, настройка
- Ремонт энкодеров ELTRA, настройка
- Ремонт энкодеров Autonics, настройка
- Ремонт энкодеров Allen Bradley, настройка
- Ремонт энкодеров BEI, настройка
- Ремонт энкодеров FUJI, настройка
- Ремонт энкодеров KUBLER, настройка
- Ремонт энкодеров HOHNER, настройка
- Ремонт энкодеров DELTA, настройка
- Ремонт энкодеров PANASONIC, настройка
- Ремонт энкодеров INDRAMAT, настройка
- Ремонт энкодеров BAUMER, настройка
- Ремонт энкодеров SEW, настройка
- Ремонт энкодеров NEMICON, настройка
- Ремонт энкодеров DINAPAR, настройка
- Ремонт энкодеров MITSUBISHI ELECTRIC, настройка
- Ремонт энкодеров OMRON, настройка
- Все статьи по ремонту промышленной электроники и оборудования
| Dynapar
Схема подключения энкодера
Схемы подключения энкодера могут быть уникальными для каждого энкодера, и необходимо следовать схеме или распиновке, указанным в техническом описании энкодера. Многоканальный дифференциальный энкодер с коммутационными дорожками может иметь до 14 проводов, и неправильное подключение может привести к проблемам с сигналом, таким как искаженные импульсы, низкая амплитуда сигнала и короткое замыкание.
Многоканальный дифференциальный энкодер с коммутационными дорожками может иметь до 14 проводов, и неправильное подключение может привести к проблемам с сигналом, таким как искаженные импульсы, низкая амплитуда сигнала и короткое замыкание.
Пример короткого замыкания проводов A и B (1 и 2 на схеме), что приводит к искажению формы импульса на обоих каналах
Уменьшение шума сигнала
Оптический энкодер не может работать как устройство обратной связи без проводки. Проблема в том, что провода действуют как антенны, что позволяет им улавливать излучаемые сигналы от ближайших источников; чем длиннее провод энкодера, тем сильнее выражен эффект. В средах с высоким уровнем электромагнитных помех (ЭМП) в первую очередь следует рассмотреть применение методов подавления шума. Кабели энкодера должны быть проложены в кабелепроводах, желательно отдельно от других проводов. Если это невозможно, их следует прокладывать только с другими маломощными кабелями постоянного тока. Сигнальные провода должны находиться на расстоянии не менее 1 фута от силовых кабелей.
Сигнальные провода должны находиться на расстоянии не менее 1 фута от силовых кабелей.
Защита важна. Как минимум, кабель должен быть защищен либо оболочкой из фольги с заземляющим проводом, либо экраном из плетеной проволоки с заземлением. Для очень чувствительных приложений или сред с высоким уровнем электромагнитных помех следует использовать провода в фольгированной оболочке в сочетании с общим экраном в оплетке вокруг кабеля.
Провода заземления энкодера
Важно применять надлежащие методы заземления. Корпус энкодера и кабель/разъем энкодера не должны быть заземлены. Энкодеры Dynapar обычно имеют средства для заземления корпуса через разъем/кабель, если заземление не может быть закреплено на монтажном кронштейне/массе машины.
Заземлите кабель только с одного конца. Заземление в нескольких точках может создать контуры заземления, что может привести к помехам, вызванным переменным током. Наилучший подход — заземлить его через разъем, в идеале со стороны привода, при условии, что привод заземлен.
В промышленных условиях большие потоки тока создаются двигателями, дистанционными переключателями и магнитными полями. Это может привести к различным электрическим потенциалам в разных точках заземления. Во избежание проблем заземлите экран кабеля энкодера вместе со всеми другими частями системы, требующими заземления, в одной точке на конце прибора, как показано на рисунке.
Предотвращение токов на валу двигателя
Преобразователи частоты могут индуцировать токи на валу, роторе и корпусе двигателя. Это является результатом высокой частоты переключения частотно-регулируемых приводов. Токи проходят через подшипники, что может повредить шарики внутри дорожек качения.
Важно изолировать энкодер от токов вала. Это можно сделать с помощью заземляющих щеток, непосредственно контактирующих с валом двигателя. Вал, в свою очередь, соединяется с корпусом двигателя, так что любые наведенные токи поступают прямо на корпус двигателя. Это защищает подшипники как энкодера, так и двигателя.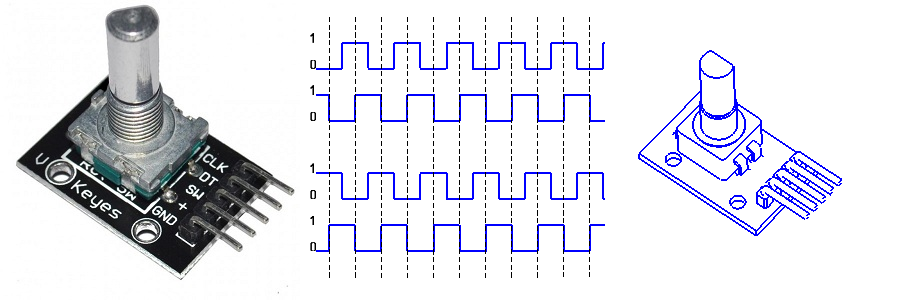
Методы заземления подшипников включают:
- Изолированные подшипники
- Токопроводящая смазка для расширения подшипников нагнетания
- Изолированные вставки для монтажа энкодеров с полым валом, включая изолирующие и нейлоновые шайбы
Различные типы кабелей и разъемов
- Типы подключения энкодера
- Что важно при выборе проводки энкодера?
- Плюсы и минусы соединения косичками
- Клеммные колодки и их особенности
- Разъемы для энкодеров и их разнообразие
- Как обеспечить проводку энкодера в соответствии с требованиями безопасности
Типы подключения энкодера
При выборе энкодеров для промышленных систем необходимо учитывать множество характеристик, чтобы получить блестящий результат, то есть точное позиционирование и точные измерения. Среди этих особенностей особое значение имеет тип подключения кабеля энкодера.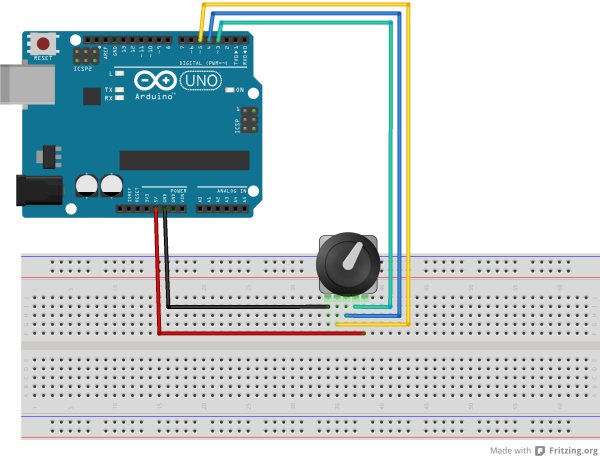
В зависимости от типа энкодера подключается либо напрямую к компьютеру, либо к специальному программатору через интерфейс. С помощью которого проверяется работоспособность энкодера. При неисправности энкодера, в большинстве случаев, его заменяют. В этом отношении энкодеры делятся на:
Что важно при выборе проводки энкодера?
- Уровень защиты. Для корректной передачи данных, собираемых энкодером, соединение должно быть максимально защищено от проникновения воды и пыли, а также виброустойчиво.
- Простота монтажа и использования также важны, поскольку эти факторы позволяют сэкономить время и получить рабочее оборудование без приглашения профессионала.
- Параметры пространства также имеют значение, так как для некоторых типов проводки требуется больше места.
- Бюджет. Это ключевой фактор при выборе всего оборудования.
Затем необходимо решить, какой тип наконечника подойдет для энкодера. Доступны 3 основных варианта :
- наконечник косички,
- различные типы разъемов, 9 шт.
 0038
0038 - клеммные колодки.
Рассмотрим подробнее каждый тип.
Плюсы и минусы соединения с помощью косички
Соединительная муфта характеризуется проводкой, которая постоянно подключена к энкодеру, так как она припаяна к оборудованию при его изготовлении. Некоторые виды пигтейлов могут быть водонепроницаемыми, если они запаяны в ПВХ-кабель, в других вариантах провода пигтейла не запаяны. Другой конец этого типа соединения имеет крышки для соединения с приводом.
Плюсы этого типа подключения следующие:
Клеммные колодки и их особенности
Этот тип подключения относится к использованию клеммной колодки. Это означает, что провод прикручен, например, к клеммной колодке. С одной стороны, клеммные колодки обеспечивают универсальные возможности подключения энкодера. С другой, требуется время и навыки, чтобы правильно его подключить. Вы должны точно знать, как подключить энкодер через клеммные колодки.
Кроме того, этот тип подключения не является безошибочным.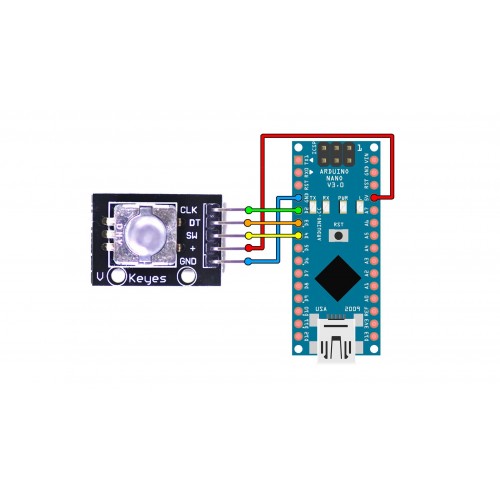
Разъемы для энкодеров и их разнообразие
Разъемы сегодня широко используются. Они позволяют пользователю отключить кабель и подключить его в любое время, если это необходимо. При изготовлении энкодеры комплектуются специальным типом штырька, который подходит к определенному типу разъема. Для кабелей соединительный шланг может быть установлен как на заводе, так и пользователем.
Для энкодеров используются различные типы разъемов. Мы приложим самые распространенные из них.
- Усиленные соединители MS с круглым сечением и мелкой резьбой. Этот тип разъема подходит для энкодеров, работающих в тяжелых условиях. Убедитесь, что вы выбрали разъем MS с припаянной резьбой и алюминиевым сплавом, так как это единственный вариант, который подходит для энкодеров. Этот тип соединителя имеет свои недостатки, так как требует времени для установки, а его резьба может быть повреждена. Тем не менее, это довольно распространенный тип, и он лучше всего подходит для опасных сред.

- Соединители М12 тип также имеют круглое сечение с напаянной резьбой. Тем не менее, в нем реализован принцип быстрой фиксации, и он проще в установке, чем разъемы типа MS. Благодаря компактному диаметру всего 12 мм он занимает меньше места. Этот тип также имеет высокий уровень защиты, что позволяет использовать его в условиях повышенной влажности, перепадов температур и агрессивных сред. Как обычно, этот разъем используется с абсолютными энкодерами.
- Разъемы M17 управляются по тому же принципу, что и разъемы M12. При этом они водонепроницаемы, легко запираются и имеют малый вес. Это позволяет использовать их во влажной среде.
- Разъемы M23 предназначены для подключения энкодера к серводвигателям и электродвигателям в промышленных системах. Они хорошо защищены и, кроме того, позволяют передавать сигналы и питание по одной и той же проводке.
- Байонетные разъемы также довольно популярны.
 Они защищают всю систему от подключения кабеля к неправильному контакту. Кроме того, он обеспечивает простую фиксацию подключенного провода при подведении к нужному контакту. Принцип блокировки прост – соединение блокируется при повороте по часовой стрелке на четверть.
Они защищают всю систему от подключения кабеля к неправильному контакту. Кроме того, он обеспечивает простую фиксацию подключенного провода при подведении к нужному контакту. Принцип блокировки прост – соединение блокируется при повороте по часовой стрелке на четверть. - Соединители Sub-D являются одними из самых компактных решений. Но принцип их монтажа требует доступа к корпусу энкодера. Поскольку они имеют низкий уровень защиты, они обычно используются в интегрированных системах с ограниченным пространством и нормальными условиями окружающей среды.
После того, как вы определили тип соединения, подходящий для вашего приложения, следующим шагом будет просмотр схемы подключения энкодера, которая обычно предоставляется в руководстве производителя.
Как обеспечить проводку энкодера в соответствии с требованиями безопасности
Вот несколько советов, как обеспечить проводку энкодера в безопасном режиме.
- Пожалуйста, придерживайтесь распиновки, указанной производителем энкодеров в технической документации, поставляемой с оборудованием.
- Используйте кабельные каналы для дополнительной защиты проводки и создания безопасной и надежной системы. Свободно лежащие кабели не допускаются.
- Электромагнитные помехи могут искажать сигнал, передаваемый по кабелю. Поэтому, пожалуйста, используйте меры по защите от электромагнитных помех, чтобы избежать искажения сигнала.
- Размещайте провода заземления отдельно от других кабелей. Не допускайте образования контуров заземления.
- В квадратурных инкрементальных энкодерах требуется дополнительная регулировка проводки для правильной фазировки.
Необходимо учитывать, что схемы кабелей энкодера не одинаковы для различных типов энкодеров. Правильная схема подключения показана в руководстве, предоставленном производителем. Не используйте техпаспорт другого производителя, даже если вы подключаете энкодеры аналогичного типа.
Также важно блокировать влияние электромагнитных помех. У каждого провода есть свой побочный эффект, то есть, помимо подачи сигнала, каждый провод также притягивает другое излучение.
