
Шаговые двигатели для 3D принтеров
Что такое шаговый двигатель
Шаговый двигатель – это бесколлекторный электродвигатель постоянного тока, который преобразовывает электрические импульсы в поворот вала на определенный угол.
В отличие от обычного двигателя, ротор шагового двигателя вращается дискретно (шагами). И полный оборот ротора состоит из нескольких шагов.
Соответственно изменяя форму сигнала, количество импульсов, их длительность и фазовый сдвиг, можно изменять скорость и направление вращения двигателя.
Типы шаговых двигателей
Существует много разновидностей шаговых двигателей.
По типу ротора, шаговые двигатели делятся на: двигатели с постоянными магнитами, реактивные двигатели и гибридные двигатели.
Наиболее распространенные – гибридные шаговые двигатели.
В зависимости от конфигурации обмоток униполярными и биполярными.
- Униполярные
 Особенность — наличие отпайки из средней точки, что позволяет с легкостью менять полюса. Минус состоит в применении части витков, поэтому уменьшается момент вращения. Для повышения мощности средний вывод подключать не рекомендуется.
Особенность — наличие отпайки из средней точки, что позволяет с легкостью менять полюса. Минус состоит в применении части витков, поэтому уменьшается момент вращения. Для повышения мощности средний вывод подключать не рекомендуется. Конструктивно униполярные устройства содержат пять и шесть выводов. Средние выводы обмоток могут быть объединены внутри двигателя, поэтому такой двигатель может иметь 5 выводов, или 6 выводов в случае если выводы о1 и о2 разъединены (как на схеме). Униполярный двигатель с двумя обмотками и отводами можно использовать в биполярном режиме, если отводы оставить неподключенными.
Одним из самых распространенных примеров униполярного шагового двигателя с пятью выводами может быть шаговый двигатель RKP-28BYJ-48-5V.
Биполярные шаговые двигатели. К этой группе относится шаговый двигатель, подключаемый к контроллеру через четыре отпайки. Обмотки могут объединятся в параллель или последовательно. Для изменения направления тока применяются так называемые чипы, обеспечивающие ручное управление.
Для работы шагового двигателя (вне зависимости от его вида) можно выбрать один из трех режимов работы:
- Полношаговый режим – ротор поворачивается на 1 шаг за 1 такт.
- Полушаговый режим – ротор поворачивается на ½ шага за 1 такт.
- Микрошаговый режим – ротор поворачивается на ¼, ⅛ и т.д. шагов за 1 такт.
Угловой шаг
Большинство моделей шаговых двигателей имеет 200 шагов на оборот, т.е. 1.8° на шаг. Кроме этого производятся двигатели с шагом в 0.9°(400 шагов на оборот). Использование микрошагового режима, позволяет делить шаг без потери точности на 8-16 микрошагов. Некоторые модели драйверов, могут делить шаг на 256 (драйвер TMC2209-UART) и даже 512 микрошагов (драйвер RKP-DM860H).
В машиностроении наибольшее распространения на сегодняшний день получили гибридные шаговые двигатели с угловым перемещением 1,8°/шаг (200 шагов/оборот) или 0,9°/шаг (400 шагов на оборот).
Классификация шаговых двигателей
Шаговые двигатели стандартизованы по посадочным размерам и размеру фланца: NEMA 14, NEMA 16, NEMA 17, NEMA 23, NEMA 34 и др.
Например, NEMA23 имеют размер корпуса 2,3 дюйма (57 мм) и могут создавать крутящий момент до 30 кгс⋅см.
При этом длина корпуса может изменяться от двигателя к двигателю в рамках одного размера. С увеличение длины корпуса увеличивается и крутящий момент двигателя.
NEMA14 (Например: Nema14-14HY0007-20)
- Габаритные размеры: 35х35 мм
- Диапазон длин: 26 – 36 мм
NEMA16 (Например: Nema16-FL39ST38-0504A)
- Габаритные размеры: 39х39 мм
- Диапазон длин: 20 – 30 мм
NEMA17 (Например: Nema17-17HS1011-20B, Nema17-60mm-6kg, Nema17-40mm-DS, Nema17-60mm-DS)
- Габаритные размеры: 42х42 мм
- Диапазон длин: 25 – 60 мм
NEMA23 (Например: Nema23-56mm-12kg-6, Nema23-50mm-DS-8)
- Габаритные размеры: 56х56 мм
- Диапазон длин: 41 – 76 мм
NEMA34 (Например: Nema34-150mm-130kg)
- Габаритные размеры: 86х86 мм
- Диапазон длин: 65 – 156 мм
Драйвер шагового двигателя
Сложная схема управления шаговым двигателем требует специального электронного устройства – драйвера шагового двигателя.
Драйвер – это элемент схемы, предназначенный для управления обмотками мотора путем подачи цифровых сигналов.
Драйверы шаговых двигателей вслед за самими двигателями делятся на униполярные и биполярные. Тип двигателя является самым важным фактором при выборе драйвера.
- Биполярный двигатель можно подключить только к драйверу биполярных двигателей .
- 6-выводной двигатель можно подключить к любому драйверу. Если не использовать выводы центральных точек обмоток, то двигатель будет биполярным, а если эти выводы соединить и подключить к GND, то двигатель будет униполярным.
- 8-выводной двигатель является наиболее гибким в плане подключения. Данный двигатель можно не только использовать как биполярный или униполярный, но и самим определять, как соединить электромагниты обмоток внутри двигателя, последовательно или параллельно.
- Униполярный двигатель, при необходимости, можно подключить и к драйверу биполярного двигателя по схеме из нескольких диодов (лучше использовать диоды Шоттки), но такое подключение гарантирует корректность работы униполярного двигателя только в полношаговом режиме.

Задача драйвера – изменять ток в обмотках как можно более эффективно.
По способу закачки тока в обмотки на сегодняшний момент наиболее популярны ШИМ-драйверы шаговых двигателей.
Эти драйверы подают на обмотку шагового мотора ШИМ-сигнал очень высокого напряжения, которое отсекается по достижению током необходимого уровня. Величина силы тока, по которой происходит отсечка, задается либо потенциометром, либо DIP-переключателем, иногда эта величина программируется с помощью специального ПО. Эти драйверы достаточно интеллектуальны, и снабжены множеством дополнительных функций, поддерживают разные деления шага, что позволяет увеличить дискретность позиционирования и плавность хода.
ШИМ-драйверы могут сильно отличаются друг от друга по электрическим характеристикам, параметрам управления, размерам и техническим характеристикам.
Электрические характеристики включают в себя максимальное напряжение на входе, номинальную мощность, силу тока на выходе, максимальная сила тока на выходе, питание переменным и постоянным током.
Помимо этого у драйверов отличается частота ШИМ. Лучше, если частота драйвера будет более 20 кГц.
Если производитель шагового двигателя указал напряжение для обмотки (как правило, оно весьма мало, порядка 1-5 В), то максимальное напряжение для драйвера рассчитывается Umax = U*25. То есть превышение номинального напряжения более чем в 23-25 раз может привести к перегреву двигателя и выходу его из строя!
Если номинальное напряжение питания обмоток не известно. Максимальное питающее напряжение двигателя можно определить исходя из индуктивности.
Umax = 32 * √L , где L — индуктивность обмотки в мГн.
Мощность, потребляемую двигателем, можно оценить, перемножив полученное в расчетах максимальное напряжение питания на 2/3 от номинального тока двигателя. Например, 32*sqrt(2.4 мГн) * 2/3 * 3 А = примерно 100 Ватт.
Формула дает приблизительную оценку. В реальности потребление много ниже, и составляет примерно: двигатели серии 57 мм — 40-70 ватт, двигатели 86 серии — 65-120 ватт на двигатель, в зависимости от нагрузки, выставленного тока на драйверах и т. п.
п.
Так же желательно, что бы драйвер имеет защиту от обратной индуцированной шаговыми двигателями ЭДС.
Подбор драйвера
Для того, что бы узнать подходит ли драйвер для шагового двигателя необходимо:
- Проверить, может ли драйвер выдавать ток фазы, равный (или примерно равный) току, указанному производителем двигателя. Если ток драйвера заметно меньше тока фазы двигателя – драйвер не подходит.
- Проверить максимальное напряжение питания двигателя. Желательно, чтобы максимально допустимое напряжение питания драйвера было примерно равно этому значению, или было немного больше. Если это условие не выполняется, то скорее всего двигатель вращаться будет, но больших скоростей достичь не удастся.
Что такое шаговый двигатель и как им управлять
Шаговый двигатель – это устройство, преобразующее электрическую энергию в механическую. При этом вращение ротора осуществляется пошагово с фиксацией в конечной позиции.
Каждый шаг представляет собой угол, величина которого зависит от устройства соответствующего двигателя. Кроме того, величиной угла можно управлять.
Шаговые двигатели используются в самых разных областях: в автомобилестроении, приборостроении, везде, где требуется механическое движение с высокой точностью позиционирования.
Популярно использование шагового двигателя и в точной робототехнике.
Устройство шагового двигателя
Как любой мотор, шаговый двигатель состоит из статора и ротора. Обмотки шагового двигателя выполнены на статоре. Они не зависят друг от друга. На роторе установлены постоянные магниты. Когда ток подается на одну из обмоток, ротор поворачивается на соответствующий угол, после чего останавливается. Подача тока на следующую обмотку опять вызывает поворот ротора, за которым следует остановка. Число импульсов, поданных на двигатель, определяют угол поворота ротора. От частоты импульсов зависит, будет ли вращение ротора скачкообразное или непрерывное.
Таким образом, устройство шагового двигателя позволяет контролировать угол поворота ротора и частоту его вращения.
В отличие от сервопривода никакого датчика позиционирования в устройстве шагового двигателя не предусмотрено.
Если есть желание разобрать двигатель, чтобы познакомиться с его устройством, то это плохая идея. Система ротор-статор представляет собой замкнутый магнитопровод, который при вмешательстве теряет ряд своих свойств, что может негативно сказаться на работе двигателя. Поэтому разбирать двигатель категорически не рекомендуется.
Принцип работы шагового двигателя
Перемещение шагового двигателя состоит из многочисленных шагов. Управление шаговым двигателем осуществляется с печатной платы, питание может подаваться от источника постоянного тока.
Отличие шагового двигателя от сервопривода
В отличие от сервопривода шаговый двигатель перемещается по шагам. Благодаря этому с его помощью можно совершать очень точные движения. Угол поворота выходного вала сервопривода обычно ограничен диапазоном от 0°C до 180°C. У шагового двигателя такого ограничения нет. Он может вращаться непрерывно. Однако управлять шаговым двигателем сложнее, чем сервоприводом.
Благодаря этому с его помощью можно совершать очень точные движения. Угол поворота выходного вала сервопривода обычно ограничен диапазоном от 0°C до 180°C. У шагового двигателя такого ограничения нет. Он может вращаться непрерывно. Однако управлять шаговым двигателем сложнее, чем сервоприводом.
Основные технические характеристики шагового двигателя
Крутящий момент – механическая характеристика шагового двигателя. Чем выше крутящий момент, тем лучше способность двигателя преодолевать возникающее при вращении сопротивление.
Удерживающий момент – это момент блокировки ротора, когда шаговый двигатель находится под напряжением, но вращения не происходит.
Стопорный момент (тормозящий момент) нужен, чтобы при совершении шага происходила фиксация ротора в конечной позиции. При отсутствии стопорного момента без поданного питания происходило бы проворачивание.
Номинальное напряжение – зависит от индуктивности двигателя. Чем выше индуктивность, тем выше требуется напряжение.
Чем выше индуктивность, тем выше требуется напряжение.
Номинальный ток – подается на обмотки шагового двигателя. Измеряется в Амперах.
Угол полного шага – способность двигателя совершать перемещение при одном шаге, указывается в градусах.
Момент инерции ротора – влияет на способность двигателя к разгону. Чем выше момент инерции, тем хуже разгон мотора.
Длина двигателя – длина корпуса без вала.
Типы шаговых двигателей
По строению различают следующие типы шаговых двигателей:
Шаговый двигатель с постоянным магнитом. Постоянный магнит такого двигателя выполнен в виде диска. Он расположен на роторе, и создает крутящий момент за счет притяжения и отталкивания обмотки на статоре.
Шаговый двигатель с переменным магнитным сопротивлением. Такой шаговый двигатель не имеет постоянного магнита. На его роторе расположено зубчатое колесо из специального металла. Крутящий момент невысокий, но зато отсутствует стопорящий момент.
На его роторе расположено зубчатое колесо из специального металла. Крутящий момент невысокий, но зато отсутствует стопорящий момент.
Гибридный шаговый двигатель. Представляет собой сочетание двух вышеперечисленных видов двигателей. Для гибридных двигателей характерна очень маленькая величина шага, в результате чего они способны достигать максимальной точности. Однако стоимость таких двигателей достаточно высока.
По типу обмотки шаговый двигатель может быть униполярным и биполярным.
Преимущества шаговых двигателей
• Главное преимущество шагового двигателя – это точность величины шага.
• Шаговый двигатель может быть быстро запущен и также быстро остановлен. Для выполнения этих действий требуется минимальное время.
• Обладает высокой надежностью. Стабильная работа при высоких нагрузках.
• Нет необходимости в датчиках или других элементах, обеспечивающих обратную связь. Позиционирование полностью определяется поступающими импульсами.
Позиционирование полностью определяется поступающими импульсами.
• Большой диапазон скоростей, в том числе возможность достижения низких скоростей.
• Доступная цена.
• Простота в установке и использовании.
Подключение шагового двигателя к печатным платам Arduino
Доступная цена шаговых двигателей и их точная эффективная работа сделали такие двигатели востребованным компонентом в любительской робототехнике. Для реализации различных творческих проектов шаговые двигатели подключатся к программируемому контроллеру Arduino. Такое подключение выполнить достаточно просто.
Обычно шаговый двигатель имеет от 4 до 6 проводов для подключения. Если у шагового двигателя четыре провода, то это биполярный двигатель. У биполярного двигателя два провода подключаются к одной обмотки, два – к другой.
Шесть проводов имеет униполярный двигатель. При этом два провода подключаются к концам каждой обмотки, а один – к ее середине. Эти провода подключаются к заземлению.
При этом два провода подключаются к концам каждой обмотки, а один – к ее середине. Эти провода подключаются к заземлению.
В униполярном двигателе за счет способа его подключения скорость вращения выше, но меньше крутящий момент. Если требуется увеличить крутящий момент, то из униполярного двигателя всегда можно сделать биполярный. Для этого просто не нужно подключать дополнительные провода.
При этом для контроллера не имеет значение, какой способ подключения выбран. В обоих случаях управление производится через два выхода для каждой обмотки.
Способ подключения выбирается в зависимости от того, что является в приоритете: скорость вращения или крутящий момент.
Нет необходимости задействовать ШИМ-выходы, так как управление двигателем зависит только от подачи тока на обмотки.
ШИМ-выходы используются для полушаговых и микрошаговых режимов. С их помощью можно повысить скорость и улучшить точность работы двигателя, а к тому же значительно снизить уровень шума. Но при этом при полушаговом и микрошаговом режиме снижается момент и усложняется способ управления шаговым двигателем.
Но при этом при полушаговом и микрошаговом режиме снижается момент и усложняется способ управления шаговым двигателем.
Питание шагового двигателя
Рекомендуется использовать внешний источник питания 5-12 В, в противном случае ресурсов платы Arduino может оказаться недостаточно.
Следует всегда помнить, что во время подключения или отключения двигателя на программируемый контроллер не должно подаваться питание! Иначе контроллер может просто сгореть.
Библиотеки и управление шаговым двигателем
Использование библиотеки позволяет упростить управление шаговым двигателем. Среди предлагаемых библиотек можно выделить библиотеку Stepper и Accel Stepper. Библиотеку Stepper не нужно скачивать, она входит в Arduino IDE и подойдет для управления шаговым двигателем в простых проектах, предусматривающих использование лишь одного двигателя. Библиотека Stepper подключается командой #include.
Библиотека Accel Stepper обладает большими возможностями. Например, с ее помощью можно управлять сразу несколькими шаговыми двигателями, а также их работой на низких скоростях. Эта библиотека предусматривает возможность ускорения и замедления. А главное она позволяет добиться плавной работы мотора.
После подключения библиотеки создается объект stepper и указывается, к каким пинам подключаются обмотки. Для этого необходимо задать количество шагов для одного оборота вала.
Драйвер
Также для управления шаговым двигателем используется драйвер. Драйвер позволяет управлять мощными двигателями, ток на которые соответственно поступает с внешнего источника питания.
Импульсы, поступающие на двигатель, формирует микроконтроллер. Для усиления этих импульсов и используется драйвер.
Функции драйвера
Прежде всего, драйвер нужен, чтобы обеспечить поступление тока на обмотки статора. Также драйвер отвечает за коммутацию обмоток и выполняет защитные функции. Тип драйвера влияет на мощность на валу двигателя.
Также драйвер отвечает за коммутацию обмоток и выполняет защитные функции. Тип драйвера влияет на мощность на валу двигателя.
На сегодняшний день существует большой выбор драйверов для шаговых двигателей, например, L293, ULN2003, A3967SLB и многие другие.
Возможные сложности
Перегрев шагового двигателя. Рабочая температура двигателя может достигать 80°C, но это еще не означает, что двигатель перегревается. Если температура мотора превышает 80°C, то только тогда можно говорить о перегреве. В случае перегрева первым делом нужно проверить, какой рабочий ток выставлен на драйвере, соответствует ли он номинальному току двигателя. Можно снизить питающее напряжение, но это приведет к снижению крутящего момента, и соответственно скажется на работе двигателя. В крайнем случае, на корпус двигателя можно установить радиатор и/или вентилятор.
Пропуск шагов. Это достаточно распространенная неприятность, связанная с работой шаговых двигателей. Причины могут быть разные. Вот некоторые из них.
Причины могут быть разные. Вот некоторые из них.
• Некачественный драйвер. Если драйвер неоригинальный, то он не всегда может справиться с непростым управлением шаговым двигателем.
• Ошибки в настройке драйвера. Например, ошибочно выставленное напряжение.
• Перегрузка двигателя. В этом случае нужно проверить, действительно ли двигатель подходит для тех целей, в которых он используется. Вероятно, нужно снизить скорость двигателя или использовать более габаритную модель.
Выбор шагового двигателя
К основным параметрам, по которым производится выбор двигателя, относятся: производитель, габариты двигателя, тип двигателя, ток фазы и индуктивность. Как правило, лучше работают двигатели с меньшей индуктивностью.
Заключение
Шаговые двигатели – эффективное решение, если нужно достичь точного перемещения в пространстве. Они представляют собой бюджетную альтернативу сервоприводу. Благодаря уже созданным библиотекам ими легко управлять. Преимущества шаговых двигателей очевидны, поэтому они являются востребованным продуктом на рынке электронных устройств.
Благодаря уже созданным библиотекам ими легко управлять. Преимущества шаговых двигателей очевидны, поэтому они являются востребованным продуктом на рынке электронных устройств.
Базовое руководство по драйверам шаговых двигателей для 3D-принтеров
Привет, братья-машины!
Сегодня мы дадим вам базовое руководство по драйверам шаговых двигателей для 3D-принтеров.
Драйверы являются фундаментальной частью работы 3D-принтера, поскольку с их помощью микроконтроллер управляет шаговыми двигателями, которые отвечают за выполнение движений по различным осям 3D-принтера.
В нашем новом инструменте сравнения 3D-принтеров вы можете увидеть, какой драйвер есть у 3D-принтера, являются ли они новыми бесшумными TMC2209драйверы или старые драйверы A4988, которые генерировали много шума. Имейте в виду, что в некоторых случаях производитель не предоставляет информацию о драйверах своих 3D-принтеров.
Без лишних слов, давайте начнем с того, что такое шаговый двигатель.
Что такое шаговые двигатели?
Что такое драйвер шагового двигателя?
Plug & Play Драйверы шаговых двигателей
Низкоуровневые драйверы шаговых двигателей
Драйверы шаговых двигателей для 3D-принтеров
Драйвер A4988
Технические характеристики драйвера A4988
Драйвер DRV8825
Технические характеристики драйвера DRV8825
Драйвер LV8729
Технические характеристики драйвера LV8729
Драйверы ТМС
Технические характеристики драйвера TMC2208
Технические характеристики драйвера TMC2209
Технические характеристики драйвера TMC2225
Технические характеристики драйвера TMC2226
Технические характеристики драйвера TMC2660
Различия между драйверами TMC
Технологии и патенты драйверов TMC
Самые известные бренды производителей драйверов для 3D-принтеров
Какие драйверы чаще всего используются в 3D-принтерах?
Измените мощность драйверов в 3D-принтерах
Влияние драйвера на оценку компаратора 3D-принтеров
Выводы по основному руководству по драйверам 3D-принтеров
Рекомендуемые статьи
Что такое шаговые двигатели? Это электромеханические устройства, которые преобразуют электрические импульсы в дискретные угловые смещения, а это означает, что они способны поворачиваться на несколько градусов (шагов) в зависимости от входных сигналов управления.
Эти двигатели не имеют щеток, их работа состоит из набора катушек, которые при электрическом питании, в зависимости от интенсивности и того, какие катушки питаются, ротор вращается на определенные градусы.
Это действительно немного сложнее, требует сложных вычислений, чтобы иметь возможность перемещать определенные шаги (или градусы), и даже возможно перемещать ротор на микрошаги, но для того, чтобы все это было возможно, знаменитый шаговый двигатель в дело вступают драйверы двигателей.
Шаговый двигатель для 3D-принтера Что такое драйвер шагового двигателя?Функция драйвера для управления шаговым двигателем заключается в выработке всех необходимых сигналов для работы двигателя, а также добавляет необходимые температурные и токовые защиты.
Как мы упоминали ранее, драйвер используется микроконтроллером для управления шаговым двигателем, и одним из преимуществ этих драйверов является то, что для связи с ними требуется только два порта микроконтроллера.
Есть несколько способов связи между контроллером и драйвером: Step/Direction, UART, SPI. Позже мы немного расскажем вам о них.
В мире драйверов для 3D-принтеров мы можем найти два типа драйверов: plug & play и низкоуровневые.
Драйверы шагового двигателя Plug & PlayЭто драйверы, которые можно подключать непосредственно к ПК, обычно с помощью USB-кабеля.
Они могут управляться и программироваться непосредственно с помощью программного обеспечения и, кроме того, они могут работать без дополнительной электроники, то есть они могут работать независимо, требуя только источника питания в качестве дополнительного элемента.
Драйвер шагового двигателя plug and play ARCUS PMX-4EX-SAЭти драйверы не используются в 3D-принтерах, представленных на рынке, но производители могут использовать их для личной печати или проектов управления осями.
Низкоуровневые драйверы шаговых двигателей Низкоуровневые драйверы чаще всего встречаются в 3D-принтерах. Эти драйверы требуют основных управляющих сигналов и для работы необходима дополнительная электроника, такая как микроконтроллеры, это означает, что они являются частью встроенной системы, они не используются самостоятельно.
Эти драйверы требуют основных управляющих сигналов и для работы необходима дополнительная электроника, такая как микроконтроллеры, это означает, что они являются частью встроенной системы, они не используются самостоятельно.
Многие производители электронных плат для 3D-принтеров FDM установили стандарт физического подключения этих драйверов, обычно состоящий из 2-полосного 8-контактного разъема.
Низкоуровневый драйвер шагового двигателя, 16-контактный (2×8) макетСуществуют различные функции и спецификации, которыми обладают эти драйверы, мы назовем самые основные ниже:
- Рабочее напряжение : Указывает диапазон напряжений которым он способен питать двигатель.
- Максимальный выходной ток на обмотку: Максимальный ток, который способен непрерывно питать каждую обмотку двигателя.
- Доступные микрошаги: Как мы упоминали в начале, эти двигатели движутся ступенчато. Самые продвинутые водители умудряются делить эти шаги на микрошаги, получая более мелкие и точные перемещения, например 1/8, 1/16, 1/32, а некоторые даже достигают 1/256.

- Способ связи и управления: Обычно мы говорим о трех способах связи.
- Шаг/Направление (Шаг/Направление): Это самый простой метод связи между микроконтроллером и драйвером. Это односторонняя связь, от контроллера к драйверу, а не наоборот, а это означает, что некоторые технологии и системы безопасности не могут быть использованы, так как драйвер не может передавать информацию микроконтроллеру.
- Шаг/Направление (Шаг/Направление): Этот метод связи обеспечивает связь в обоих направлениях, от контроллера к драйверу и от драйвера к микроконтроллеру. Этот тип связи позволяет контроллеру получать информацию о драйвере и шаговых двигателях.
- SPI: Как и UART, этот метод связи является двунаправленным.
- Шаг/Направление (Шаг/Направление): Это самый простой метод связи между микроконтроллером и драйвером. Это односторонняя связь, от контроллера к драйверу, а не наоборот, а это означает, что некоторые технологии и системы безопасности не могут быть использованы, так как драйвер не может передавать информацию микроконтроллеру.
ПРИМЕЧАНИЕ: Наверняка вас интересует разница между UART и SPI, это просто разные способы связи, это больше всего зависит от коммуникационной совместимости между микроконтроллером и драйвером (хотя в более техническом смысле , SPI — это протокол, а UART — аппаратное обеспечение).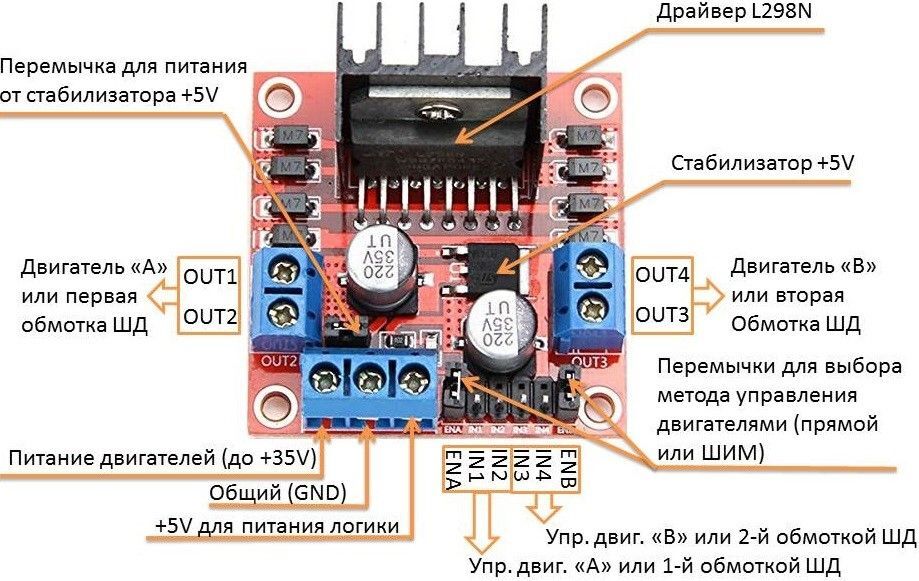 Но оба способа связи считаются умными и позволяют использовать передовые фирменные технологии (о которых мы поговорим позже).
Но оба способа связи считаются умными и позволяют использовать передовые фирменные технологии (о которых мы поговорим позже).
- Механизмы безопасности: Это механизмы для защиты электроники и двигателей. Это достигается за счет контроля и управления, например, перегревом, перегрузкой по току и коротким замыканием.
- Технологические патенты: Хотя мы поговорим об этом чуть подробнее позже, вы должны знать, что у таких компаний, как Trinamic, есть интересные технологические патенты, например, технология StealthChop, которая позволила значительно заглушить шум, создаваемый Наши 3D принтеры.
Далее мы покажем драйверы для 3D-принтеров в хронологическом порядке появления: с этим драйвером, который достиг огромной популярности, как для использования в 3D-принтерах, так и в других типах оборудования, использующих шаговые двигатели, например, ЧПУ и плоттерах.
Не было производителя, который бы не знал о существовании этого драйвера.
Технические характеристики драйвера A4988- Драйвер: A4988
- Операционные напряжения: 8V до 32V
- Максимум.
- Метод связи и управления: Шаг/Направление
- Механизмы безопасности: Перегрузка по току, перегрев, короткое замыкание.
Ниже приведены некоторые 3D-принтеры с форматом A49.88 драйвер:
- Creality Ender 3
- Geeetech A20T
Затем появился драйвер DRV8825 с некоторыми улучшениями по сравнению с A4988. Этот драйвер был способен работать с более высокими напряжениями, более высокими токами и иметь возможность обеспечивать меньшие микрошаги.
Технические характеристики драйвера DRV8825- Драйвер: DRV8825
- Рабочее напряжение: 8.
 2V до 45V
2V до 45V - Максимальный выходной ток на катушку: 1,5A
- Доступные микростепы: 1/32
- СМОТРИИ И МЕТОДЕРСКИ короткое замыкание.
Этот драйвер имеет возможность работы с микрошагами до 1/128. Кроме того, он представлен в качестве опции для подавления шума, создаваемого 3D-принтерами, при сохранении хорошего соотношения цена/качество.
Технические характеристики драйвера LV8729- Драйвер: LV8729
- Операционные напряжения: 6V
- Максимум.
- Метод связи и управления: Шаг/Направление
- Механизмы безопасности: Перегрузка по току, перегрев, короткое замыкание.
- Технологические патенты: Это бесшумный драйвер
Драйверы Trinamic Motion Control являются самыми популярными в мире 3D-печати, поскольку они имеют очень хорошие технические характеристики и очень полезные технологические патенты, такие как шумоподавление и тепловыделение. диссипация, в том числе.
диссипация, в том числе.
Наиболее часто используемыми драйверами TMC в 3D-принтерах являются TMC2208, TMC2209, TMC2225, TMC2226 и TMC2660.
Далее мы покажем вам основные технические характеристики этих драйверов:
Технические характеристики драйвера TMC2208 Драйвер шагового двигателя TMC2208- Драйвер: TMC2208
- Оперативные напряжения: 5V. 1/256
- Способ связи и управления: Step/Dir, UART
- Механизмы безопасности: Перегрузка по току, перегрев, короткое замыкание.
- Технологические патенты: StealthChop (Silent), SpreadCycle, MicroPlyer.
The following are some 3D printers that have the TMC2208 driver:
- Creality Ender-3 V2
- Anycubic Mega Pro
- FOKOOS Odin-5 F3
- Драйвер: TMC2209
- Рабочее напряжение: 5–28 В
- Максимальный выходной ток на катушку: 2A
- Доступные микрошаги: 1/256
- Способ связи и управления: Step/Dir, UART
- Механизмы безопасности: Перегрузка по току, перегрев, короткое замыкание.

- Технологические патенты: StealthChop (Silent), SpreadCycle, MicroPlyer, StallGuard, CoolStep.
Ниже перечислены некоторые 3D-принтеры с драйвером TMC2209:
- Snapmaker 2.0 A250T
- Creality CR-6 Max
- Anycubic Vyper
- Driver: TMC2225
- Operating voltages: 5V to 36V
- Maximum output current на катушку: 1,4 A
- Доступные микрошаги: 1/256
- Способ связи и управления: Step/Dir, UART
- Механизмы безопасности: Перегрузка по току, перегрев, короткое замыкание.
- Технологические патенты: StealthChop (Silent), SpreadCycle, MicroPlyer, лучше рассеивает тепло.
The following are some 3D printers that have the TMC2225 driver:
- Elegoo Neptune 3
- Flying Bear Ghost 6
- Driver: TMC2226
- Рабочие напряжения: с 5 В до 29 В
- Максимальный выходной ток на катушку: 2A
- Доступные микростепы: 1/256
- Связь и Метод управления: Шаг/Dir, Uart
- .
 Перегрузка по току, перегрев, короткое замыкание.
Перегрузка по току, перегрев, короткое замыкание. - Технологические патенты: StealthChop (Silent), SpreadCycle, MicroPlyer, StallGuard, CoolStep, лучше рассеивает тепло.
3D-принтер, использующий этот драйвер, называется Biqu BX 9.0004
Технические характеристики драйвера TMC2660 Драйвер шагового двигателя TMC2660- Драйвер: TMC2660
- Оперативные напряжения: 5V
- . 1/256
- Метод связи и управления: Шаг/Направление, SPI
- Механизмы безопасности: Перегрузка по току, перегрев, короткое замыкание.
- Технологические патенты: SpreadCycle, MicroPlyer, StallGuard, CoolStep.
Some 3D printers that use the TMC2660 driver are:
- Modix BIG-40
- Tumaker NX Pro
The TMC2208 and TMC2209, have silent functionality, being the TMC2209 more advanced чем TMC2208, поскольку TMC2209 имеет больше функций и поддерживает больший ток.
Характеристики и функциональные возможности TMC2225 и TMC2226 практически такие же, как у TMC2208 и TMC2209соответственно. Разница в том, что TMC2225 и TMC2226 лучше рассеивают тепло, чем TMC2208 и TMC2209.
Таким образом, можно сказать, что TMC2225 лучше рассеивает тепло TMC2208 (но занимает больше места), а TMC2226 лучше рассеивает тепло TMC2209 (но занимает больше места).
Когда производителю 3D-принтеров требуется лучшее рассеивание тепла, они обращаются к TMC2225 и TMC2226.
TMC2226 более совершенен, чем TMC2225.
Драйвер TMC2660 — это драйвер, который поддерживает самые современные из упомянутых выше, по этой причине мы обычно находим этот драйвер в более крупных 3D-принтерах, которые требуют использования двигателей с большим крутящим моментом.
Технологии и патенты драйверов TMC StallGuard : Эта технология позволяет измерять расход двигателя, применяя метод, известный как «Бессенсорное самонаведение». Это означает, что мы можем применить автодом (отправить все оси в начало координат) без использования какого-либо механического переключателя.
Это означает, что мы можем применить автодом (отправить все оси в начало координат) без использования какого-либо механического переключателя.
Когда оси достигают исходной точки и механически не могут двигаться дальше, драйвер может интерпретировать это как нулевое положение любой из осей. Хотя для этого необходимо, чтобы механическая система принтера была прочной, прочной и устойчивой.
CoolStep : Как и в случае с StallGuard, с CoolStep мы можем измерять расход двигателя без каких-либо дополнительных датчиков. Но в этом случае CoolStep стремится правильно управлять током, подавая меньший ток, когда нагрузка ниже, а это означает, что он подает соответствующий ток в определенные моменты, способствуя снижению тепла, выделяемого в двигателях, до 80%.
StealthChop : Это, вероятно, самая популярная технология Trinamic Motion Control, поскольку именно благодаря ей нам удалось заставить наши 3D-принтеры замолчать, это стало этапом до и после в мире 3D-печати с помощью FDM.
Интересно, что Trinamic удалось снизить шум двигателей без ущерба для крутящего момента, но при этом удалось обеспечить более плавные движения.
SpreadCycle : Эта технология повышает энергоэффективность, а также обеспечивает более плавные переходы и движения, особенно когда нам нужно свести ускорение к нулю.
DcStep : С помощью DcStep мы можем получить дополнительный крутящий момент за счет снижения скорости в случаях внезапного и резкого увеличения нагрузки, тем самым гарантируя, что мы не потеряем шагов двигателя.
MicroPlyer : Благодаря MicroPlyer мы можем получить микрошаги до 1/256, так как MicroPlyer заботится об интерполяции этих шагов.
SensOstep : Эта технология сопровождается дополнительным оборудованием, которое мы должны установить на наши шаговые двигатели.
Это датчик, который позволяет нам обнаруживать потерю шагов, тем самым уменьшая погрешность.
Технология SensOstep Самые известные бренды производителей драйверов для 3D-принтеров- TMC ( Trinamic Motion Co ntrol принтер): Немецкая компания, выпускающая самые популярные в настоящее время драйверы для 3D-принтеров.
 TMC2208, TMC2209, TMC2225, TMC2226 и TMC2660.
TMC2208, TMC2209, TMC2225, TMC2226 и TMC2660.
- Pololu / Allegro Микросистемы: Американская компания Polulo производит карты с драйвером Allegro A4988. Эти драйверы были практически главными действующими лицами массового распространения 3D-принтеров.
- Pololu / Texas Instruments : Polulo снова производит карты с драйвером DRV8825 от Texas Instruments. Эти драйверы вышли на рынок, стремясь представить альтернативу с некоторыми улучшениями по сравнению со знаменитым A4988.
Основываясь на базе данных, которой мы управляем в нашем компараторе 3D-принтеров, мы можем составить небольшой рейтинг наиболее часто используемых в настоящее время драйверов на основе информации, предоставленной производителями.
- TMC2209
- TMC2660
- TMC2225
- A4988
- TMC2208
Примечание: . Смол.
Смол.
Мощность, которую мы собираемся подавать на наши шаговые двигатели, можно изменить с помощью потенциометра, который находится на драйвере шагового двигателя.
Этот параметр зависит от используемого драйвера и шагового двигателя.
Если вы используете драйвер, сконфигурированный в интеллектуальном режиме (UART или SPI), это значение можно регулировать в цифровом виде, через Gcode, но помните, что это значение также будет ограничено потенциометром, поэтому вы все равно должны убедиться, что потенциометр не на минимальном уровне.
Потенциометр драйвера TMC2209Если установить низкую мощность, двигатель может терять шаги. Если вы настроите большую мощность, у мотора будет больше крутящий момент, но мотор и драйвер будут перегреваться, подвергая риску обоих, и точно так же из-за перегрева вы можете терять ступени.
В идеале следует узнать на форумах и на сайте производителя, какое значение является оптимальным для вашего 3D-принтера, так как в зависимости от механических и электрических характеристик вашего принтера это значение может меняться.
Идея состоит в том, чтобы использовать значение, при котором моторы не теряют шагов, и вы не перегреваете моторы.
Также нужно быть очень осторожным при регулировке потенциометра, так как вы можете случайно его закоротить.
Влияние драйвера на оценку компаратора 3D-принтеровЕсли вы войдете в наш компаратор 3D-принтеров, вы заметите, что каждый 3D-принтер имеет оценку, основанную на его технических характеристиках.
72 балла за Anycubic Kobra Plus 9.0002 Драйвер шагового двигателя, используемый в 3D-принтере, учитывается при получении оценки 3D-принтера (среди прочих технических характеристик).Итак, если мы сравним два 3D-принтера с одинаковыми характеристиками, но один принтер имеет драйвер A4988, а другой принтер TMC2209, наш компаратор присвоит более высокий балл принтеру с TMC2209, так как этот драйвер более продвинутый, как мы видели и изучали в этой статье.
Проблема в том, что не все производители объясняют или подробно описывают, какой драйвер есть у их 3D-принтеров, поэтому возможно, что у какого-то принтера есть хороший драйвер, но они никогда его не указывали, в данном случае принтер, у которого нет драйвера информация потеряет некоторые очки.
В любом случае, в нашем компараторе, хотя драйвер и влияет на присвоение оценки 3D-принтеру, в действительности он не оказывает большого влияния на рейтинг, как другие параметры (например, температура, он способен достичь экструдера или цена). Поскольку мы знаем, что во многих случаях производители не предоставляют всю техническую информацию, а для некоторых 3D-принтеров получить эту информацию довольно сложно.
Выводы по основному руководству по драйверам для 3D-принтеровТеперь вы немного больше знаете о драйверах 3D-принтеров и о том, какие функции они выполняют.
Вы поймете, что они являются фундаментальной частью этого оборудования и что благодаря им у нас есть технология, позволяющая заглушить наши 3D-принтеры, добиться более плавных и плавных движений, меньшего энергопотребления, меньших микрошагов и возможности делать autohome без физических переключателей, среди прочего.
Недавно мы опубликовали еще одну статью, посвященную нашему компаратору и аксессуарам для 3D-принтеров, поскольку наш компаратор показывает совместимые аксессуары для некоторых принтеров, если вы хотите взглянуть, мы оставляем вам ссылку дальше. Лучшие аксессуары для вашего 3D-принтера.
Лучшие аксессуары для вашего 3D-принтера.
Если вы только начинаете заниматься 3D-печатью или уже знакомы с ней, эти три статьи могут быть очень полезны:
- Наиболее часто используемые термины в 3D-печати: В этой статье вы узнаете о терминологии, используемой в 3D-печати. .
- Руководство для начинающих по Simplify3D: предназначено для всех, кто только начинает знакомиться с миром 3D-печати и интересуется слайсером Simplify3D.
- Расширенное руководство Simplify3D: для тех, кто уже знаком с основами Simplify3D, но хочет расширить свои знания об этом слайсере.
Не стесняйтесь оставлять любые вопросы, которые у вас есть, в нашем разделе комментариев, а также любой вклад или предложение, которое вы хотите сделать, мы здесь, чтобы расти вместе в этом чудесном мире 3D-печати.
Привет.
До скорой встречи, братья Машины!
Рекомендуемые статьиДРУГИЕ СТАТЬИ
Цвет провода и пары катушек шагового двигателя
Дом
Дуэт Wi-Fi
Цвета проводов и пар катушек шагового двигателя0004 Порядок подключения шагового двигателя и порядок цветов парных катушек
Цветовая маркировка проводов шагового двигателя
Чтобы правильно подключить любой шаговый двигатель, нам нужно определить, какие провода являются «парами» или подключены к концам каждой катушки.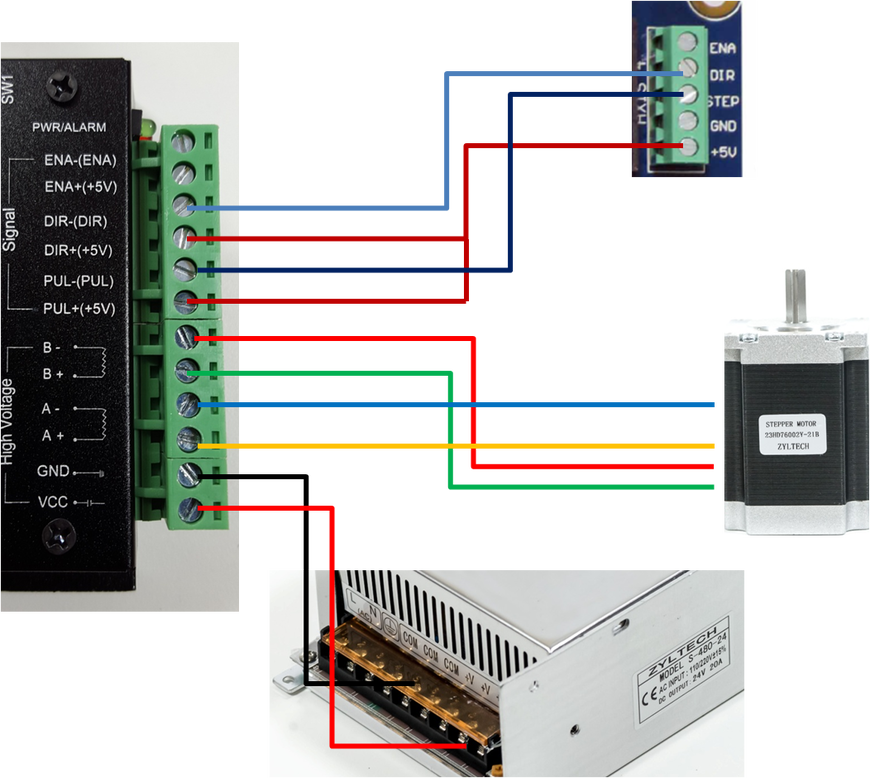 Обычно их называют катушкой «А» и катушкой «В». Точный порядок пар черных/зеленых или зеленых/черных булавок не имеет значения, но важно, чтобы пары были вместе слева, а красные/синие друг с другом справа.
Обычно их называют катушкой «А» и катушкой «В». Точный порядок пар черных/зеленых или зеленых/черных булавок не имеет значения, но важно, чтобы пары были вместе слева, а красные/синие друг с другом справа.
Чтобы двигатель двигался правильно и в правильном направлении, шаговые двигатели должны быть правильно подключены. Имеет значение, какая катушка какая и какова полярность катушек. Хотя универсального стандарта для цветовой маркировки шаговых двигателей не существует, многие производители шаговых двигателей соблюдают порядок проводов шаговых двигателей с парами катушек двигателя
- Черный/зеленый — катушка двигателя
- Красный/синий — катушка двигателя
Хотя цветам проводов нельзя доверять, порядок проводов обычно следующий:
Опция подключения 1- 1A – Зеленый
- 1B – черный
- 2A – синий
- 2B – красный
 01049
01049. + красный
Иногда Вариант
- A + черный (красный)
- A – зеленый (зеленый)
- B + красный (желтый)
- B – синий (синий)
Слева
- Красный/Синий с каждым
Справа
- Черные/зеленые с каждым остальным
Идентификация пары Coil
If It The Color Motor Phass
и проводка двигателя не позволяет двигателю двигаться, игнорируйте цвета проводов и вместо этого смотрите на положение проводов. Используйте мультиметр, чтобы проверить, есть ли непрерывность в проводке шагового двигателя — оба двигателя вели себя одинаково: было нулевое сопротивление между синим и красным, нулевое сопротивление зеленым и черным.
Вот два способа соединения проводов шагового двигателя с фазами:
- С помощью мультиметра проверьте сопротивление. Между двумя проводами, относящимися к одной фазе, должно быть сопротивление в несколько Ом, а между проводами, принадлежащими разным фазам, не должно быть непрерывности.
- Когда провода двигателя ни к чему не подключены, проверните вал двигателя. Замкните два провода вместе, затем снова поверните вал. Если крутить намного труднее, чем раньше, эти два провода относятся к одной и той же фазе. В противном случае попробуйте еще раз с другой парой проводов, закороченных вместе.
Используйте мультиметр, чтобы правильно подобрать катушки и провода. Ом проверить шаговые двигатели. Пара проводов должна иметь небольшое сопротивление. Если значения сопротивления правильные. Двигатели XYZ рассчитаны на 4,2 В, 1,5 А, 2,8 Ом +/-10%. Двигатель экструдера рассчитан на 2,6 В, 1 А, 2,6 Ом +/- 10%.
- Проверить сопротивление.
 Между двумя проводами, относящимися к одной фазе, должно быть сопротивление в несколько Ом, а между проводами, принадлежащими разным фазам, не должно быть непрерывности.
Между двумя проводами, относящимися к одной фазе, должно быть сопротивление в несколько Ом, а между проводами, принадлежащими разным фазам, не должно быть непрерывности. - Не подсоединяя провода двигателя, проверните вал двигателя. Замкните два провода вместе, затем снова поверните вал. Если крутить намного труднее, чем раньше, эти два провода относятся к одной и той же фазе. В противном случае попробуйте еще раз с другой парой проводов, закороченных вместе.
Биполярные двигатели
Биполярные двигатели имеют две отдельные катушки:
Красный/зеленый — одна катушка
Синий/желтый — вторая катушка.
Используйте мультиметр, чтобы правильно подобрать катушки и провода. Ом проверить шаговые двигатели. Пара проводов должна иметь небольшое сопротивление. Если значения сопротивления правильные. Двигатели XYZ рассчитаны на 4,2 В, 1,5 А, 2,8 Ом +/-10%. Двигатель экструдера рассчитан на 2,6 В, 1 А, 2,6 Ом +/- 10%.
Как рассчитать сечение и длину провода для 3D-принтера? Большинство 3D-принтеров используют либо 12 В, либо…
Продолжайте читать
Шейна Хупера
Продолжайте читать
Шейна Хупера
Шаговый двигатель какого размера следует использовать? В то время как размер шагового двигателя — это просто площадь, это…
Продолжайте читать
Шейна Хупера
Как подключить материнскую плату Duet 3 6HC Duet 3 — отличная плата для вашего 3D-принтера, но…
Продолжайте читать
Шейна Хупера
Хотя Duet 3 не заменит Duet 2 в ближайшее время, это гораздо более профессиональная электронная плата, которая…
Продолжайте читать
Шейна Хупера
Конфигурация проводки и прошивки платы расширения DuetWifi
Продолжайте читать
Шейна Хупера
С таким количеством доступных комплектов для 3D-принтеров и планов сборки с открытым исходным кодом может быть непросто выбрать…
Продолжайте читать
Шейна Хупера
SolidCore CoreXY Z-ось выравнивания платформы Недавно мы начали работать над системой выравнивания и крепления платформы SolidCore для 3D-принтера. В…
В…
Продолжайте читать
Шейна Хупера
Хотя эта запись еще не завершена, я продолжаю исследовать кинематический монтаж и математику…
Продолжайте читать
Шейн Хупер
Объяснение кинематикиCoreXY? Механическое устройство кинематики corexy включает в себя уникальное движение двигателя, при котором двигатель перемещается по осям X или Y…
Продолжайте читать
Шейна Хупера
Продолжайте читать
Шейна Хупера
Модульные масштабируемые линейные рельсы Корпус со сбалансированной тележкой В спецификации используются наиболее доступные детали Все металлические детали или 3D-печатная ось Z:…
Продолжайте читать
Шейна Хупера
Спецификации профиля рамыРазмер 2020 или 20 мм x 20 мм Тип рамы с Т-образным пазом Спецификация Список деталей ДетальКоличествоОписаниеИсточникДокументацияПапкаПрофили рамы2020 T-SlotZylTechСписок размеров рамыРама…
Продолжайте читать
Шейна Хупера
Траектория инструмента CAD/CAM — это запрограммированная ЧПУ траектория, по которой инструмент удаляет металл с заготовки. Там…
Там…
Продолжайте читать
Шейн Хупер
Итак, вы ищете файлы для загрузки САПР… Что ж, E3D наконец выпустила файлы. Вы можете найти файлы…
Продолжайте читать
Шейна Хупера
Система движения CoreXY — хорошее решение, если вы хотите печатать быстрее. Кинематика 3д принтера стала…
Продолжайте читать
Шейна Хупера
В последнем обновлении конструкции используются три шаговых двигателя оси Z. При таком расположении ремень направляется к приводу шагового двигателя…
Продолжайте читать
Шейна Хупера
Аддитивное производство или быстрое прототипирование AM продолжают совершенствовать производство 3D-печати и предлагают решения для производителей с приложениями в…
Продолжайте читать
Шейна Хупера
Несмотря на то, что существует множество соглашений о 3D-печати и аддитивном производстве, нет ничего лучше, чем Rapid Event. РАПИД +…
РАПИД +…
Продолжайте читать
Шейна Хупера
Maker Faire — это интересное собрание создателей и творческих людей, которые любят учиться и любят делиться тем, что они…
Продолжайте читать
Шейна Хупера
Midwest Reprap Festival 2019 был больше, чем годом ранее. Там было так много людей, которые присутствовали и выставлялись.…
Продолжайте читать
Шейна Хупера
Хотя эта страница будет использоваться для документирования и сбора ресурсов для реализации устройства смены инструмента на принтере SolidCore, мы…
Продолжайте читать
Шейна Хупера
CoreXY Масштабируемость Масштабируемость принтера core-xy может быть проблемой, когда речь идет о проектировании и реализации аппаратного обеспечения.…
Продолжайте читать
Шейна Хупера
WorkHorse — это крупномасштабная машинная платформа для 3D-печати.
