
Шаговый двигатель 6 проводов подключение
Общие сведения:
Шаговый двигатель — это бесколлекторный двигатель, ротор которого вращается не плавно, а шагами (дискретно). Полный оборот ротора состоит из нескольких шагов. Меняя форму сигнала, количество импульсов, их длительность и фазовый сдвиг, можно задавать скорость вращения, направление вращения и количество оборотов ротора двигателя.
Шаговые двигатели состоят из ротора (подвижная часть) и статора (неподвижная часть). На статоре устанавливают электромагниты, а части ротора взаимодействующие с электромагнитами выполняются из магнитотвердого (двигатель с постоянными магнитами) или магнитомягкого (реактивный двигатель) материала.
Виды шаговых двигателей по типу ротора:
По типу ротора, шаговые двигатели делятся на: двигатели с постоянными магнитами, реактивные двигатели и гибридные двигатели.
- Двигатель с постоянными магнитами (ротор из магнитотвердого материала). На роторе установлен один, или несколько, постоянных магнитов. Количество полных шагов в одном обороте таких двигателей, зависит от количества постоянных магнитов на роторе, и количества электромагнитов на статоре. Обычно в одном обороте от 4 до 48 шагов (один шаг от 7,5° до 90° ).
- Реактивный двигатель (ротор из магнитомягкого материала). Еще такие двигатели называют двигателями с переменным магнитным сопротивлением. Ротор не имеет постоянных магнитов, он выполнен из магнитомягкого материала в виде многоконечной звезды. Данные двигатели встречаются редко, так как у них наименьший крутящий момент, по сравнению с остальными, при тех же размерах. Количество полных шагов в одном обороте таких двигателей, зависит от количества зубцов на звезде ротора, и количества электромагнитов на статоре. Обычно в одном обороте от 24 до 72 шагов (один шаг от 5° до 15°.)
- Гибридный двигатель (совмещает технологии двух предыдущих двигателей).
 Ротор выполнен из магнитотвердого материала (как у двигателя с постоянными магнитами), но имеет форму многоконечной звезды (как у реактивного двигателя). Количество полных шагов в одном обороте таких двигателей, зависит от количества постоянных магнитов на звезде ротора, и количества электромагнитов на статоре. Количество шагов в одном обороте таких двигателей может доходить до 400 (один шаг от 0,9°).
Ротор выполнен из магнитотвердого материала (как у двигателя с постоянными магнитами), но имеет форму многоконечной звезды (как у реактивного двигателя). Количество полных шагов в одном обороте таких двигателей, зависит от количества постоянных магнитов на звезде ротора, и количества электромагнитов на статоре. Количество шагов в одном обороте таких двигателей может доходить до 400 (один шаг от 0,9°).
Какой тип шагового двигателя у меня?
Если вручную покрутить ротор отключённого двигателя, то можно заметить, что он движется не плавно, а шагами. После того, как Вы покрутили ротор, замкните все провода двигателя и покрутите ротор повторно. Если ротор крутится также, значит у Вас реактивный двигатель. Если для вращения ротора требуется прикладывать больше усилий, значит у вас двигатель с постоянными магнитами или гибридный. Отличить двигатель с постоянными магнитами от гибридного можно подсчитав количество шагов в одном обороте. Для этого не обязательно считать все шаги, достаточно примерно понять, их меньше 50 или больше. Если меньше, значит у Вас двигатель с постоянными магнитами, а если больше, значит у Вас гибридный двигатель.
Виды шаговых двигателей по типу соединения электромагнитов статора:
По типу соединения электромагнитов, шаговые двигатели делятся на: униполярные и биполярные.
На рисунке представлено упрощённое, схематическое, представление обмоток.
На самом деле, каждая обмотка состоит из нескольких обмоток электромагнитов, соединённых последовательно или параллельно
- Биполярный двигатель имеет 4 вывода. Выводы A и A питают обмотку AA, выводы B и B питают обмотку BB. Для включения электромагнита, на выводы обмотки необходимо подать разность потенциалов (два разных уровня), поэтому двигатель называется биполярным. Направление магнитного поля зависит от полярности потенциалов на выводах.
- Униполярный двигатель имеет 5 выводов. Центральные точки его обмоток соединены между собой и являются общим (пятым) выводом, который, обычно, подключают к GND.
 Для включения электромагнита, достаточно подать положительный потенциал на один из выводов обмотки, поэтому двигатель называется униполярным. Направление магнитного поля зависит от того, на какой именно вывод обмотки подан положительный потенциал.
Для включения электромагнита, достаточно подать положительный потенциал на один из выводов обмотки, поэтому двигатель называется униполярным. Направление магнитного поля зависит от того, на какой именно вывод обмотки подан положительный потенциал. - 6-выводной двигатель имеет ответвление от центральных точек обмоток, но обмотка AA не соединена с обмоткой BB. Если не использовать выводы центральных точек обмоток, то двигатель будет биполярным, а если эти выводы соединить и подключить к GND, то двигатель будет униполярным.
- 8-выводной двигатель является наиболее гибким в плане подключения электромагнитов. Данный двигатель можно не только использовать как биполярный или униполярный, но и самим определять, как соединить электромагниты обмоток, последовательно или параллельно.
Какой тип шагового двигателя у меня?
Если у Вашего двигателя 4 вывода, значит он биполярный. Если у Вашего двигателя 5 выводов, значит он униполярный. Но если у Вашего двигателя 6 и более выводов, то это не значит что некоторые из них являются центральными выводами катушек электромагнитов. Дело в том, что есть двигатели, некоторые выводы которых (обычно крайние), электрически замкнуты, так биполярный двигатель может иметь 6 выводов. Точно определить тип соединений, для двигателей с 6 и более выводами, можно только измеряя сопротивление между выводами.
Режимы работы шаговых двигателей:
- Для работы шагового двигателя (вне зависимости от его вида) можно выбрать один из трех режимов работы:
- Полношаговый режим – ротор поворачивается на 1 шаг за 1 такт.
- Полушаговый режим – ротор поворачивается на ½ шага за 1 такт.
- Микрошаговый режим – ротор поворачивается на ¼, ⅛ и т.д. шагов за 1 такт.
Ниже рассмотрены режимы работы, на примере биполярного двигателя с постоянным магнитом и полным шагом 90°.
Полношаговый режим (одна фаза на полный шаг).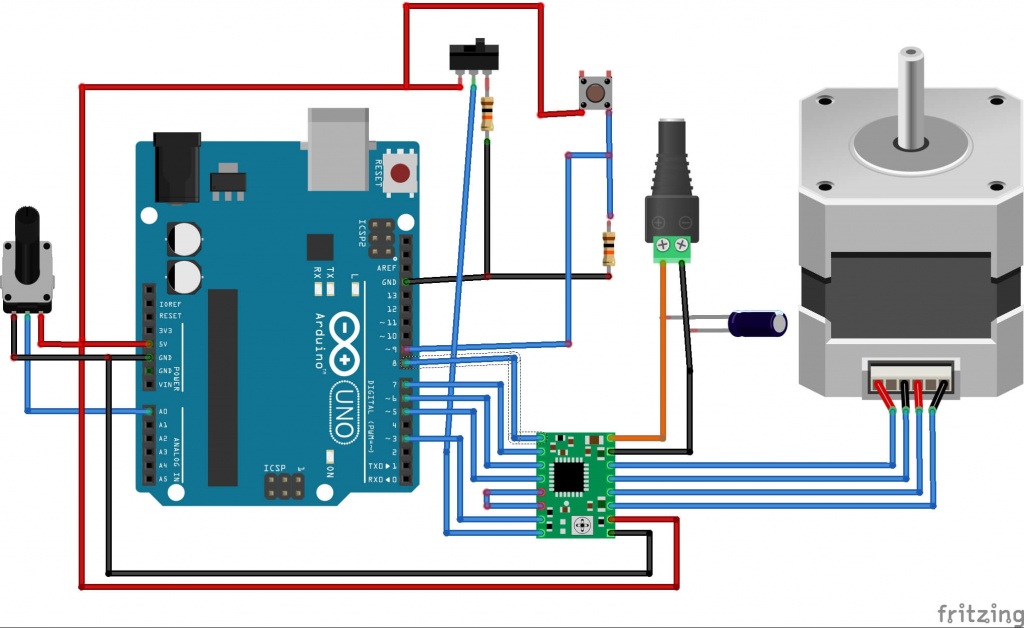 Номинальные значения шагового двигателя указываются именно для этого режима.
Номинальные значения шагового двигателя указываются именно для этого режима.
Полношаговый режим (две фазы на полный шаг). Этот режим позволяет увеличить крутящий момент почти в половину от номинального.
Полушаговый режим. Этот режим позволяет увеличить количество шагов в полном обороте в два раза, при незначительном уменьшении крутящего момента.
Микрошаговый режим. Этот режим является наиболее распространённым, он позволяет увеличить количество шагов в полном обороте в четыре раза, благодаря неравномерному распределению токов в обмотках. Снижение токов можно достичь снижением напряжения (как показано на картинке) или подавать полное напряжение через подключаемую внешнюю нагрузку.
Если подавать уровни не «0» – «½» – «1» (как на картинке), а «0» – «¼» – «½» – «¾» – «1», то количество шагов в полном обороте увеличится не в 4 раза, а в 8 раз. Можно увеличить количество шагов в 16, 32, 64 раза и т.д., а если заменить дискретные уровни сигналов на синусоиды, то мотор будет вращаться плавно (без шагов).
Режимы пониженного энергопотребления – доступны только для 8-выводных двигателей. Эти режимы отличаются от обычных тем, что используют только половину фазы (половину электромагнитов). Данные режимы используются редко, так как они значительно снижают крутящий момент двигателя.
Пример работы шаговых двигателей с разными видами роторов:
Подключение шаговых двигателей к Arduino:
Электромоторы нельзя подключать к выводам Arduino напрямую, так как они потребляют значительные токи, шаговые двигатели не являются исключением, поэтому их подключают через драйверы.
Большинство драйверов работают либо с биполярными двигателями, либо с униполярными.
- Биполярный двигатель можно подключить только к драйверу биполярных двигателей.
- 6-выводной двигатель можно подключить к любому драйверу.
 Если не использовать выводы центральных точек обмоток, то двигатель будет биполярным, а если эти выводы соединить и подключить к GND, то двигатель будет униполярным.
Если не использовать выводы центральных точек обмоток, то двигатель будет биполярным, а если эти выводы соединить и подключить к GND, то двигатель будет униполярным. - 8-выводной двигатель является наиболее гибким в плане подключения. Данный двигатель можно не только использовать как биполярный или униполярный, но и самим определять, как соединить электромагниты обмоток внутри двигателя, последовательно или параллельно.
- Униполярный двигатель, при необходимости, можно подключить и к драйверу биполярного двигателя по простой схеме из нескольких диодов (лучше использовать диоды Шоттки), но такое подключение гарантирует корректность работы униполярного двигателя только в полношаговом режиме.
Для работы практически всех электрических приборов, необходимы специальные приводные механизмы. Предлагаем рассмотреть, что такое шаговый двигатель, его конструкцию, принцип работы и схемы подключения.
Что такое шаговый двигатель?
Шаговый двигатель представляет собой электрическую машину, предназначенную для преобразования электрической энергии сети в механическую энергию. Конструктивно состоит из обмоток статора и магнитомягкого или магнитотвердого ротора. Отличительной особенностью шагового двигателя является дискретное вращение, при котором заданному числу импульсов соответствует определенное число совершаемых шагов. Наибольшее применение такие устройства получили в станках с ЧПУ, робототехнике, устройствах хранения и считывания информации.
В отличии от других типов машин шаговый двигатель совершает вращение не непрерывно, а шагами, от чего и происходит название устройства. Каждый такой шаг составляет лишь часть от его полного оборота. Количество необходимых шагов для полного вращения вала будет отличаться, в зависимости от схемы соединения, марки двигателя и способа управления.
Преимущества и недостатки шагового электродвигателя
К преимуществам эксплуатации шагового двигателя можно отнести:
- В шаговых электродвигателях угол поворота соответствует числу поданных электрических сигналов, при этом, после остановки вращения сохраняется полный момент и фиксация;
- Точное позиционирование – обеспечивает 3 – 5% от установленного шага, которая не накапливается от шага к шагу;
- Обеспечивает высокую скорость старта, реверса, остановки;
- Отличается высокой надежностью за счет отсутствия трущихся компонентов для токосъема, в отличии от коллекторных двигателей;
- Для позиционирования шаговому двигателю не требуется обратной связи;
- Может выдавать низкие обороты для непосредственно подведенной нагрузки без каких-либо редукторов;
- Сравнительно меньшая стоимость относительно тех же сервоприводов;
- Обеспечивается широкий диапазон управления скоростью оборотов вала за счет изменения частоты электрических импульсов.
К недостаткам применения шагового двигателя относятся:
- Может возникать резонансный эффект и проскальзывание шагового агрегата;
- Существует вероятность утраты контроля из-за отсутствия обратной связи;
- Количество расходуемой электроэнергии не зависит от наличия или отсутствия нагрузки;
- Сложности управления из-за особенности схемы
Устройство и принцип работы
На рисунке 1 изображены 4 обмотки, которые относятся к статору двигателя, а их расположение устроено так, что они находятся под углом 90º относительно друг друга. Из чего следует, что такая машина характеризуется размером шага в 90º.
В момент подачи напряжения U1 в первую обмотку происходит перемещение ротора на те же 90º. В случае поочередной подачи напряжения U2, U3, U4 в соответствующие обмотки, вал продолжит вращение до завершения полного круга. После чего цикл повторяется снова. Для изменения направления вращения достаточно изменить очередность подачи импульсов в соответствующие обмотки.
Типы шаговых двигателей
Для обеспечения различных параметров работы важна как величина шага, на который будет смещаться вал, так и момент, прилагаемый для перемещения. Вариации данных параметров достигаются за счет конструкции самого ротора, способа подключения и конструкции обмоток.
По конструкции ротора
Вращаемый элемент обеспечивает магнитное взаимодействие с электромагнитным полем статора. Поэтому его конструкция и технические особенности напрямую определяют режим работы и параметры вращения шагового агрегата. Чтобы на практике определить тип шагового мотора, при обесточенной сети необходимо провернуть вал, если ощущаете сопротивление, то это свидетельствует о наличии магнита, в противном случае, это конструкция без магнитного сопротивления.
Реактивный
Реактивный шаговый двигатель не оснащается магнитом на роторе, а выполняется из магнитомягких сплавов, как правило, его набирают из пластин для уменьшения потерь на индукцию. Конструкция в поперечном разрезе напоминает шестерню с зубцами. Полюса статорных обмоток запитываются противоположными парами и создают магнитную силу для перемещения ротора, который двигается от попеременного протекания электрического тока в обмоточных парах.
Конструкция в поперечном разрезе напоминает шестерню с зубцами. Полюса статорных обмоток запитываются противоположными парами и создают магнитную силу для перемещения ротора, который двигается от попеременного протекания электрического тока в обмоточных парах.
С переменным магнитным сопротивлением
Весомым плюсом такой конструкции шагового привода является отсутствие стопорящего момента, образуемого полем по отношению к арматуре. По факту это тот же синхронный двигатель, в котором поворот ротора идет в соответствии с полем статора. Недостатком является снижение величины вращающего момента. Шаг для реактивного двигателя колеблется от 5 до 15°.
С постоянными магнитами
В этом случае подвижный элемент шагового двигателя собирается из постоянного магнита, в котором может быть два и большее количеством полюсов. Вращение ротора обеспечивается притяжением или отталкиванием магнитных полюсов электрическим полем при подаче напряжения в соответствующие обмотки. Для этой конструкции угловой шаг составляет 45-90°.
С постоянным магнитом
Гибридные
Был разработан с целью объединения лучших качеств двух предыдущих моделей, за счет чего агрегат обладает меньшим углом и шагом. Его ротор выполнен в виде цилиндрического постоянного магнита, который намагничен по продольной оси. Конструктивно это выглядит как два круглых полюса, на поверхности которых расположены зубцы ротора из магнитомягкого материала. Такое решение позволило обеспечить отличный удерживающий и крутящий момент.
По виду обмоток
На практике шаговый двигатель представляет собой многофазный мотор. Плавность работы в котором напрямую зависит от количества обмоток – чем их больше, тем плавне происходит вращение, но и выше стоимость. При этом крутящий момент от числа фаз не увеличивается, хотя для нормальной работы их минимальное число на статоре электродвигателя должно составлять хотя бы две. Количество фаз не определяет числа обмоток, так двухфазный шаговый двигатель может иметь четыре и более обмотки.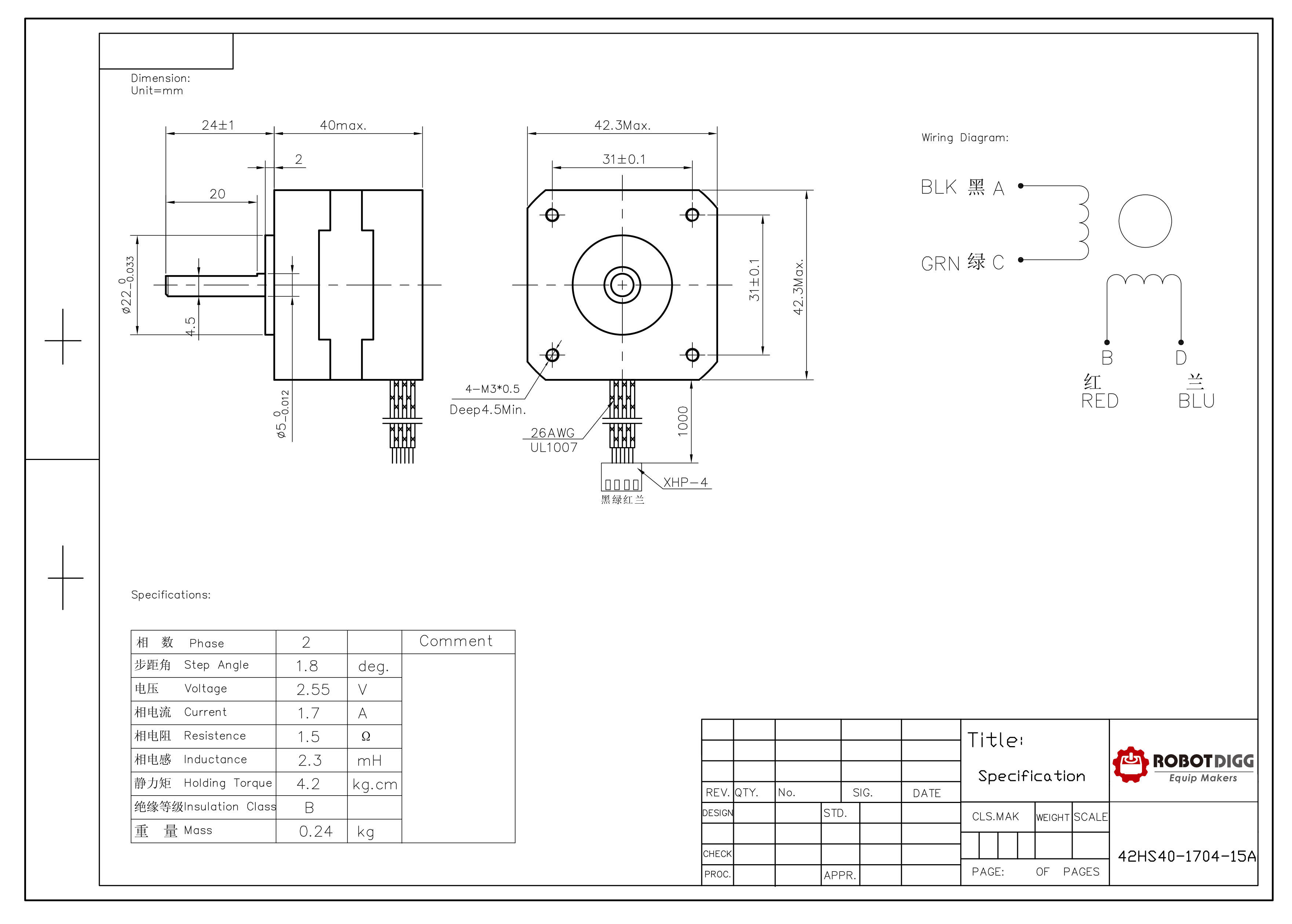
Униполярный
Униполярный шаговый двигатель отличается тем, что в схеме подключения обмотки имеется ответвление от средней точки. Благодаря чему легко меняются магнитные полюса. Недостатком такой конструкции является использование только одной половины доступных витков, из-за чего достигается меньший вращающий момент. Поэтому они отличаются большими габаритами.
Униполярный ШД
Для использования всей мощности катушки средний вывод оставляют не подключенным. Рассмотрите конструкции униполярных агрегатов, они могут содержать 5 и 6 выводов. Их количество будет зависеть от того, выводится срединный провод отдельно от каждой обмотки двигателя или они соединяются вместе.
Схема а) с различными, б) с одним выводом
Биполярный
Биполярный шаговый двигатель подключается к контроллеру через 4 вывода. При этом обмотки могут соединяться внутри как последовательно, так и параллельно. Рассмотрите пример его работы на рисунке.
Биполярный шаговый двигатель
В конструктивной схеме такого двигателя вы видите с одной обмоткой возбуждения в каждой фазе. Из-за этого смена направления тока требует использовать в электронной схеме специальные драйверы (электронные чипы, предназначенные для управления). Добиться подобного эффекта можно при помощи включения Н-моста. В сравнении с предыдущим, биполярное устройство обеспечивает тот же момент при гораздо меньших габаритах.
Подключение шагового двигателя
Чтобы запитать обмотки, потребуется устройство способное выдать управляющий импульс или серию импульсов в определенной последовательности. В качестве таких блоков выступают полупроводниковые приборы для подключения шагового двигателя, микропроцессорные драйвера. В которых имеется набор выходных клемм, каждая из них определяет способ питания и режим работы.
В зависимости от схемы подключения должны применяться те или другие выводы шагового агрегата. При различных вариантах подведения тех или иных клемм к выходному сигналу постоянного тока получается определенная скорость вращения, шаг или микрошаг линейного перемещения в плоскости.
Так как для одних задач нужна низкая частота, а для других высокая, один и тот же двигатель может задавать параметр за счет драйвера.
Типичные схемы подключения ШД
В зависимости того, какое количество выводов представлено на конкретном шаговом двигателе: 4, 6 или 8 выводов, будет отличаться и возможность использования той или иной схемы их подключения Посмотрите на рисунки, здесь показаны типичные варианты подключения шагового механизма:
Схемы подключения различных типов шаговых двигателей
При условии запитки основных полюсов шаговой машины от одного и того же драйвера, по данным схемам можно отметить следующие отличительные особенности работы:
- Выводы однозначно подводятся к соответствующим клеммам устройства. При последовательном соединении обмоток увеличивает индуктивность обмоток, но понижает ток.
- Обеспечивает паспортное значение электрических характеристик. При параллельной схеме увеличивается ток и снижается индуктивность.
- При подключении по одной фазе на обмотку снижется момент на низких оборотах и уменьшает величину токов.
- При подключении осуществляет все электрические и динамические характеристики согласно паспорта, номинальный токи. Значительно упрощается схема управления.
- Выдает куда больший момент и применяется для больших частот вращения;
- Как и предыдущая предназначена для увеличения момента, но применяется для низких частот вращения.
Управление шаговым двигателем
Выполнение операций шаговым агрегатом может осуществляться несколькими методами. Каждый из которых отличается способом подачи сигналов на пары полюсов. Всего выделяют тир метода активации обмоток.
Волновой – в таком режиме происходит возбуждение только одной обмотке, к которой и притягиваются роторные полюса. При этом шаговый двигатель не способен вытягивать большую нагрузки, так как выдает лишь половину момента.
Волновое управление
Полношаговый – в таком режиме происходит одновременная коммутация фаз, то есть, возбуждаются сразу обе.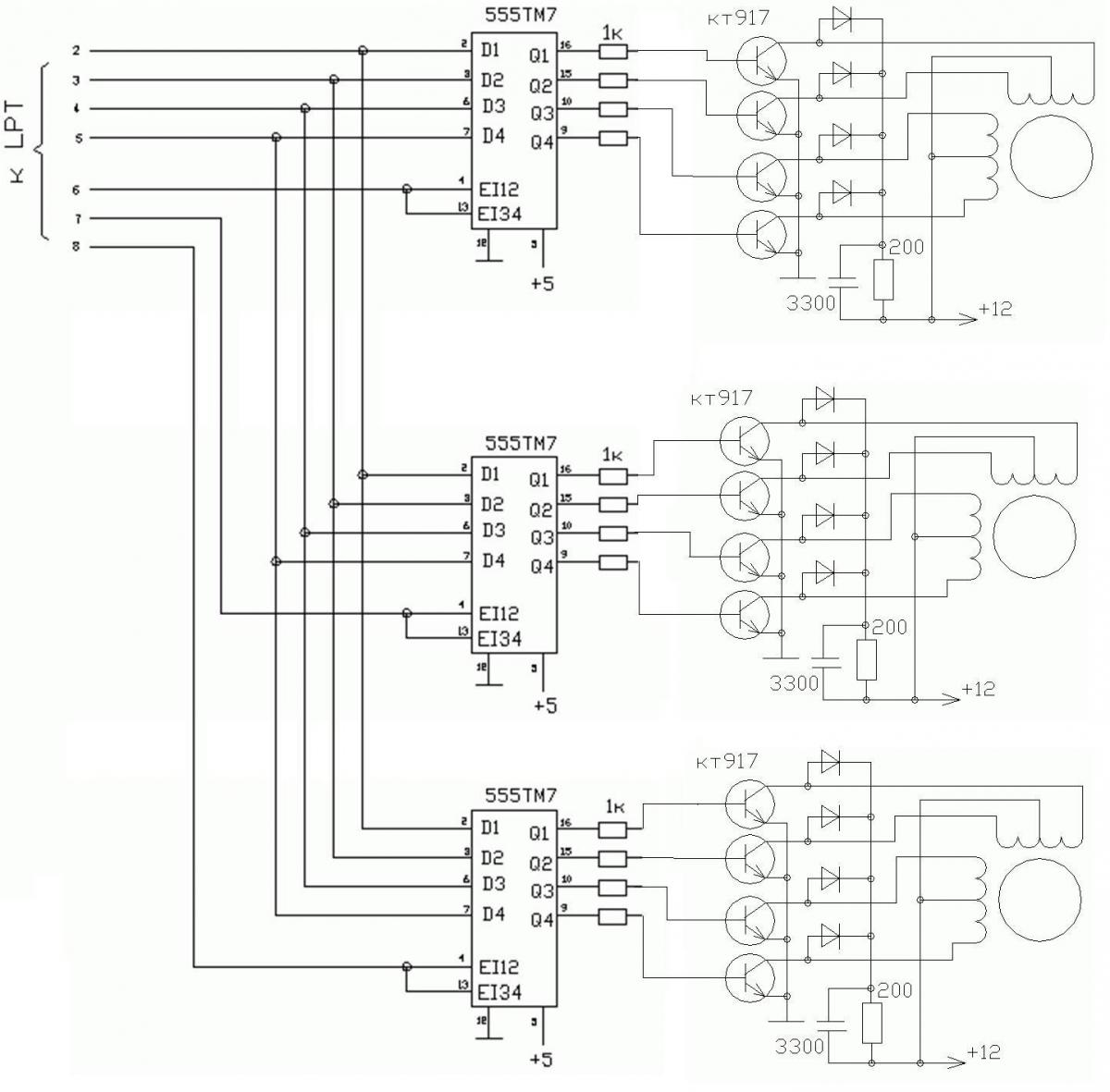 Из-за чего обеспечивается максимальный момент, в случае параллельного соединения или последовательного включения обмоток будет создаваться максимальное напряжение или ток.
Из-за чего обеспечивается максимальный момент, в случае параллельного соединения или последовательного включения обмоток будет создаваться максимальное напряжение или ток.
Полношаговое управление
Полушаговый – представляет собой комбинацию двух предыдущих методов коммутации обмоток. Во время реализации которого в шаговом двигателе происходит поочередная подача напряжения сначала в одну катушку, а затем сразу в две. Благодаря чему обеспечивается лучшая фиксация на максимальных скоростях и большее количество шагов.
Полушаговое управление
Для более мягкого управления и преодоления инерции ротора используется микрошаговое управление, когда синусоида сигнала осуществляется микроступенчатыми импульсами. За счет чего силы взаимодействия магнитных цепей в шаговом двигателе получают более плавное изменение и, как следствие, перемещение ротора между полюсами. Позволяет в значительной степени снизить рывки шагового двигателя.
Без контроллера
Для управления бесколлекторными двигателями применяется система Н-моста. Который позволяет переключать полярность для реверса шагового двигателя. Может выполняться на транзисторах или микросхемах, которые создают логическую цепочку для перемещения ключей.
Схема Н-моста
Как видите, от источника питания V напряжение подается на мост. При попарном включении контактов S1 – S4 или S3 – S2 будет происходить движение тока через обмотки двигателя. Что и обусловит вращение в ту или иную сторону.
С контроллером
Устройство контроллера позволяет осуществлять управление шаговым двигателем в различных режимах. В основе контроллера лежит электронный блок, формирующий группы сигналов и их последовательность, посылаемых на катушки статора. Для предотвращения возможности его повреждения в случае короткого замыкания или другой аварийной ситуации на самом двигателе каждый вывод защищается диодом, который не пропусти импульс в обратную сторону.
Подключение через контроллер однополярного шагового двигателя
Популярные схемы управления ШД
Является одним из наиболее помехозащищенных способов работы. При этом прямой и инверсный сигнал напрямую подключается к соответствующим полюсам. В такой схемы должно применяться экранирование сигнального проводника. Прекрасно подходит для нагрузки с низкой мощностью.
При этом прямой и инверсный сигнал напрямую подключается к соответствующим полюсам. В такой схемы должно применяться экранирование сигнального проводника. Прекрасно подходит для нагрузки с низкой мощностью.
Схема управления от контроллера с выходом типа «открытый коллектор»
В данной схеме происходит объединение положительных вводов контроллера, которые подключаются к положительному полюсу. В случае питания выше 9В требуется включение в схему специального резистора для ограничения тока. Позволяет задавать необходимое количество шагов со строго установленной скоростью, определить ускорение и т.д.
Простейший драйвер шагового двигателя своими руками
Чтобы собрать схему драйвера в домашних условиях могут пригодиться некоторые элементы от старых принтеров, компьютеров и другой техники. Вам понадобятся транзисторы, диоды, резисторы (R) и микросхема (RG).
Схема простейшего драйвера
Для построения программы руководствуйтесь следующим принципом: при подаче на один из выводов D логической единицы (остальные сигнализируют ноль) происходит открытие транзистора и сигнал проходит к катушке двигателя. Таким образом, выполняется один шаг.
На основе схемы составляется печатная плата, которую можно попытаться изготовить самостоятельно или сделать под заказ. После чего на плате впаиваются соответствующие детали. Устройство способно управлять шаговым устройством от домашнего компьютера за счет подключения к обычному USB порту.
КАК ПОДКЛЮЧИТЬ ШАГОВЫЙ ДВИГАТЕЛЬ
Как подключить шаговый двигатель с 4, 5, 6 и 8 выводами к драйверу.
В предыдущих статьях мы рассматривали процесс выбора шагового электродвигателя (см. статью«Как выбрать шаговый двигатель») в зависимости от способа его применения. В данной статье мы подробно рассмотрим как подключить шаговый двигатель.
Шаговые электродвигатели могут поставляться с несколькими вариантами схем подключения. Выбор схемы будет определяться типом двигателя. Большинство наиболее распространенных шаговых двигателей имеют схемы, предполагающие использование 4-х, 5-ти, 6-ти или 8-ми проводов.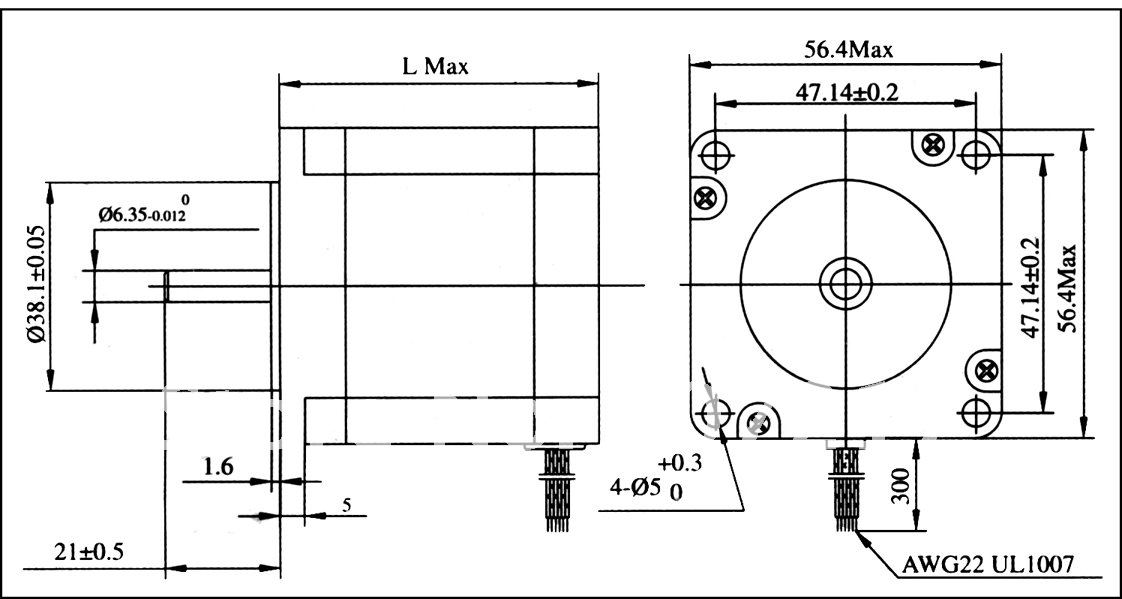
КАК ПОДКЛЮЧИТЬ ШАГОВЫЙ ДВИГАТЕЛЬ С 4 ВЫВОДАМИ
Если в вашем распоряжении имеется шаговый двигатель, подключаемый при помощи только четырех проводов, это означает, что в нем две обмотки, это биполярный мотор и вы сможете использовать его только с биполярным драйвером. Обратите внимание на то, что каждая из фазных обмоток содержит пару проводов — для идентификации каждого провода используйте тестер (мультиметр).
Найдите замкнутые между собой провода(которые прозваниваются) и подключите их к шаговому двигателю. Лучше сразу свяжите их вместе, чтобы не повторять операцию постоянно
КАК ПОДКЛЮЧИТЬ УНИПОЛЯРНЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ С 6 ВЫВОДАМИ
Для того, чтобы подключить шаговый двигатель с 6 выводами, с помощью тестера разделите все провода на три группы, замкнутые между собой, а затем найдите центральные выводы, измеряя сопротивление между проводами. Если вы хотите подключить ваш электродвигатель к униполярному драйверу, используйте все шесть проводов.
Подключение к биполярному драйверу(коих подавляющее большинство) потребует от вас использования только одного конца провода с одним выводом и одного центрального вывода для подключения к каждой обмотке.
Кроме того, определить обмотки можно только методом проб и ошибок; лучше всего попытаться найти центральный вывод, так как его сопротивление составляет половину от сопротивления других проводов.
“>
Шаговые двигатели
Шаговые двигатели относятся к классу бесколлекторных двигателей постоянного тока. Как и любые бесколлекторные двигатели, они имеют высокую надежность и большой срок службы, что позволяет использовать их в критичных, например, индустриальных применениях.
По сравнению с обычными двигателями постоянного тока, шаговые двигатели требуют значительно более сложных схем управления, которые должны выполнять все коммутации обмоток при работе двигателя. Выбор контроллера для управления шаговым двигателем описан в статье Контроллеры ШД.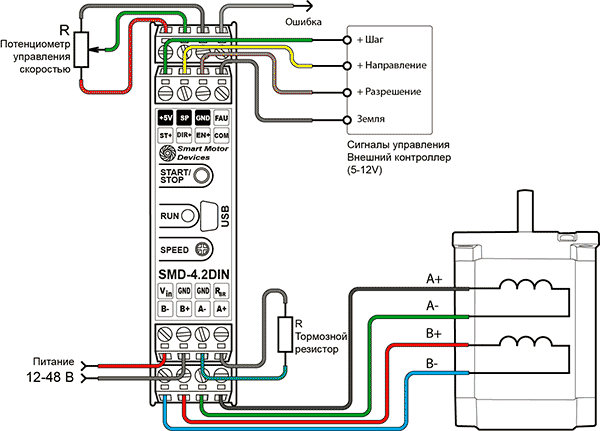 Кроме того, сам шаговый двигатель – дорогостоящее устройство, поэтому там, где точное позиционирование не требуется, обычные коллекторные двигатели имеют заметное преимущество. Справедливости ради следует отметить, что в последнее время для управления коллекторными двигателями все чаще применяют контроллеры, которые по сложности практически не уступают контроллерам шаговых двигателей.
Кроме того, сам шаговый двигатель – дорогостоящее устройство, поэтому там, где точное позиционирование не требуется, обычные коллекторные двигатели имеют заметное преимущество. Справедливости ради следует отметить, что в последнее время для управления коллекторными двигателями все чаще применяют контроллеры, которые по сложности практически не уступают контроллерам шаговых двигателей.
Одним из главных преимуществ шаговых двигателей является возможность осуществлять точное позиционирование и регулировку скорости без датчика обратной связи. Это очень важно, так как такие датчики могут стоить намного больше самого двигателя. Однако это подходит только для систем, которые работают при малом ускорении и с относительно постоянной нагрузкой. В то же время системы с обратной связью способны работать с большими ускорениями и даже при переменном характере нагрузки. Если нагрузка шагового двигателя превысит его момент, то информация о положении ротора теряется и система требует базирования с помощью, например, концевого выключателя или другого датчика. Системы с обратной связью не имеют подобного недостатка.
При проектировании конкретных систем приходится делать выбор между сервомотором и шаговым двигателем. Когда требуется прецизионное позиционирование и точное управление скоростью, а требуемый момент и скорость не выходят за допустимые пределы, то шаговый двигатель является наиболее экономичным решением. Как и для обычных двигателей, для повышения момента может быть использован понижающий редуктор. Однако для шаговых двигателей редуктор не всегда подходит.
В отличие от коллекторных двигателей, у которых момент растет с увеличением скорости, шаговый двигатель имеет больший момент на низких скоростях. К тому же, шаговые двигатели имеют гораздо меньшую максимальную скорость по сравнению с коллекторными двигателями, что ограничивает максимальное передаточное число и, соответственно, увеличение момента с помощью редуктора.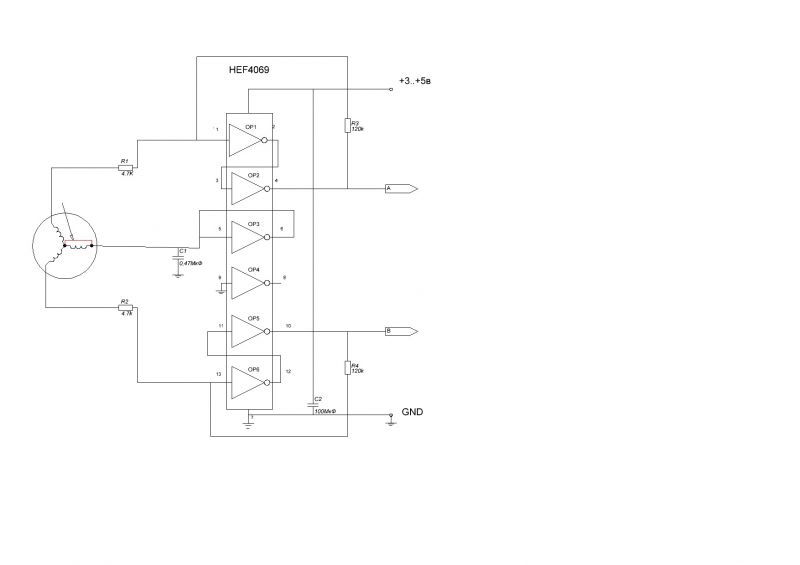 Готовые шаговые двигатели с редукторами хотя и существуют, однако являются экзотикой. Еще одним фактом, ограничивающим применение редуктора, является присущий ему люфт. Возможность получения низкой частоты вращения часто является причиной того, что разработчики, будучи не в состоянии спроектировать редуктор, применяют шаговые двигатели неоправданно часто. В то же время коллекторный двигатель имеет более высокую удельную мощность, низкую стоимость, простую схему управления, и вместе с одноступенчатым червячным редуктором он способен обеспечить тот же диапазон скоростей, что и шаговый двигатель. К тому же, при этом обеспечивается значительно больший момент. Приводы на основе коллекторных двигателей очень часто применяются в технике военного назначения, а это косвенно говорит о хороших параметрах и высокой надежности таких приводов. Да и в современной бытовой технике, автомобилях, промышленном оборудовании коллекторные двигатели распространены достаточно сильно. Тем не менее, для шаговых двигателей имеется своя, хотя и довольно узкая, сфера применения, где они незаменимы.
Готовые шаговые двигатели с редукторами хотя и существуют, однако являются экзотикой. Еще одним фактом, ограничивающим применение редуктора, является присущий ему люфт. Возможность получения низкой частоты вращения часто является причиной того, что разработчики, будучи не в состоянии спроектировать редуктор, применяют шаговые двигатели неоправданно часто. В то же время коллекторный двигатель имеет более высокую удельную мощность, низкую стоимость, простую схему управления, и вместе с одноступенчатым червячным редуктором он способен обеспечить тот же диапазон скоростей, что и шаговый двигатель. К тому же, при этом обеспечивается значительно больший момент. Приводы на основе коллекторных двигателей очень часто применяются в технике военного назначения, а это косвенно говорит о хороших параметрах и высокой надежности таких приводов. Да и в современной бытовой технике, автомобилях, промышленном оборудовании коллекторные двигатели распространены достаточно сильно. Тем не менее, для шаговых двигателей имеется своя, хотя и довольно узкая, сфера применения, где они незаменимы.
Виды шаговых двигателей:
· двигатели с переменным магнитным сопротивлением
· двигатели с постоянными магнитами
· гибридные двигатели
Определить тип двигателя можно даже на ощупь: при вращении вала обесточенного двигателя с постоянными магнитами (или гибридного) чувствуется переменное сопротивление вращению, двигатель вращается как бы щелчками. В то же время вал обесточенного двигателя с переменным магнитным сопротивлением вращается свободно. Гибридные двигатели являются дальнейшим усовершенствованием двигателей с постоянными магнитами и по способу управления ничем от них не отличаются.
Определить тип двигателя можно также по конфигурации обмоток. Двигатели с переменным магнитным сопротивлением обычно имеют три (реже четыре) обмотки с одним общим выводом.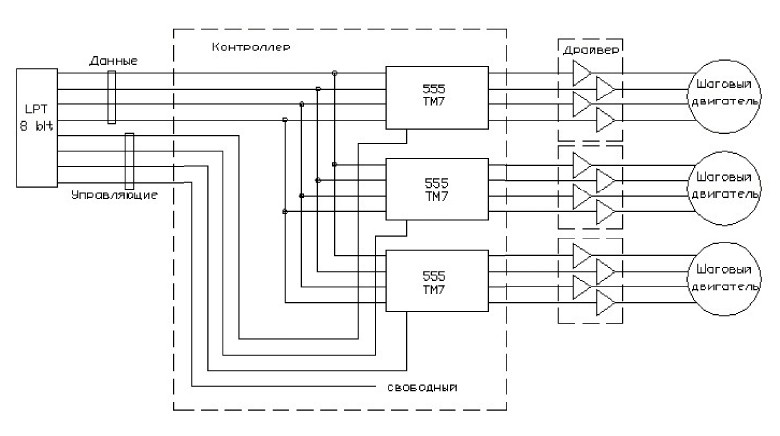 Двигатели с постоянными магнитами чаще всего имеют две независимые обмотки. Эти обмотки могут иметь отводы от середины. Иногда двигатели с постоянными магнитами имеют 4 раздельных обмотки. В шаговом двигателе вращающий момент создается магнитными потоками статора и ротора, которые соответствующим образом ориентированы друг относительно друга.
Двигатели с постоянными магнитами чаще всего имеют две независимые обмотки. Эти обмотки могут иметь отводы от середины. Иногда двигатели с постоянными магнитами имеют 4 раздельных обмотки. В шаговом двигателе вращающий момент создается магнитными потоками статора и ротора, которые соответствующим образом ориентированы друг относительно друга.
Статор изготовлен из материала с высокой магнитной проницаемостью и имеет несколько полюсов. Полюс можно определить как некоторую область намагниченного тела, где магнитное поле сконцентрировано. Полюса имеют как статор, так и ротор. Для уменьшения потерь на вихревые токи магнитопроводы собраны из отдельных пластин, подобно сердечнику трансформатора. Вращающий момент пропорционален величине магнитного поля, которая пропорциональна току в обмотке и количеству витков. Таким образом, момент зависит от параметров обмоток. Если хотя бы одна обмотка шагового двигателя запитана, ротор принимает определенное положение. Он будет находится в этом положении до тех пор, пока внешний приложенный момент не превысит некоторого значения, называемого моментом удержания. После этого ротор повернется и будет стараться принять одно из следующих положений равновесия.
Биполярные и униполярные шаговые двигатели
В зависимости от конфигурации обмоток двигатели делятся на биполярные и униполярные. Биполярный двигатель имеет одну обмотку в каждой фазе, которая для изменения направления магнитного поля должна переполюсовывается драйвером. Для такого типа двигателя требуется мостовой драйвер, или полумостовой с двухполярным питанием. Всего биполярный двигатель имеет две обмотки и, соответственно, четыре вывода.Униполярный двигатель также имеет одну обмотку в каждой фазе, но от середины обмотки сделан отвод. Это позволяет изменять направление магнитного поля, создаваемого обмоткой, простым переключением половинок обмотки.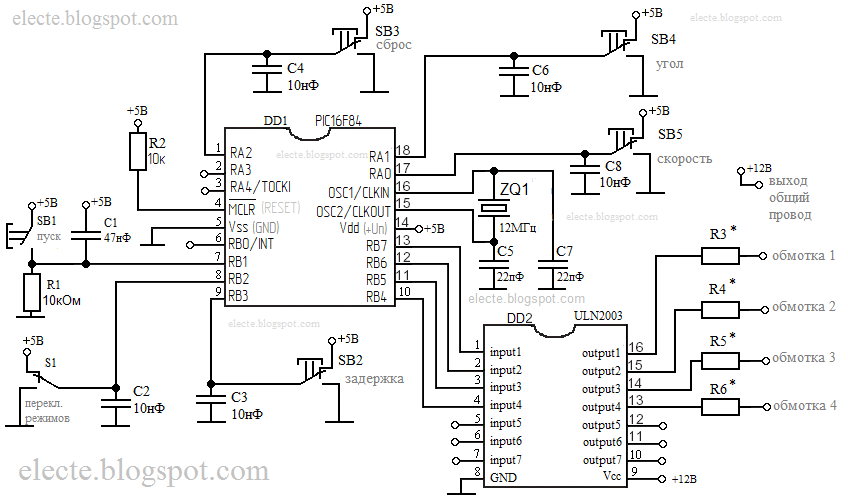
Средние выводы обмоток могут быть объединены внутри двигателя, поэтому такой двигатель может иметь 5 или 6 выводов Иногда униполярные двигатели имеют раздельные 4 обмотки, по этой причине их ошибочно называют 4-х фазными двигателями. Каждая обмотка имеет отдельные выводы, поэтому всего выводов 8. При соответствующем соединении обмоток такой двигатель можно использовать как униполярный или как биполярный. Униполярный двигатель с двумя обмоткими и отводами тоже можно использовать в биполярном режиме, если отводы оставить неподключенными. В любом случае ток обмоток следует выбирать так, чтобы не превысить максимальной рассеиваемой мощности. Если сравнивать между собой биполярный и униполярный двигатели, то биполярный имеет более высокую удельную мощность. При одних и тех же размерах биполярные двигатели обеспечивают больший момент.
6-ти выводные шаговые двигатели
Для подключения 6-ти выводного шагового двигателя к классическому биполярному драйверу может быть выбран один из двух способов – униполярное либо биполярное подключение обмоток двигателя.
Униполярное подключение
Если требуется вращать двигатель на средних и высоких скоростях (из диапазона рабочих скоростей), лучший тип подключения – использовать центральный отвод. Электрические характеристики двигателя – ток обмотки, сопротивление обмотки, статический крутящий момент, индуктивность обмоток и др. – в этом случае равны данным, приведенным в каталоге.
Биполярное подключение
Если требуется вращать двигатель на низких скоростях (из диапазона рабочих скоростей), лучший тип подключения – биполярное. Электрические характеристики двигателя – ток обмотки, сопротивление обмотки, статический крутящий момент, индуктивность обмоток и др. – в этом случае равны данным, приведенным в каталоге. При таком типе подключения нужно уменьшить ток, подаваемый на обмотки двигателя в √2 раз. Например, если номинальный рабочий ток двигателя составляет 2 А, то при последовательном включении обмоток требуемый ток – 1.4 А, то есть в 1.4 раза меньше. Это можно легко понять из следующих рассуждений. Номинальный рабочий ток, указанный в каталоге, рассчитан на сопротивление одной обмотки (R – именно оно приведено в каталоге). При последовательном включении обмоток сопротивление объединенной обмотки возрастает в два раза (2R).
– в этом случае равны данным, приведенным в каталоге. При таком типе подключения нужно уменьшить ток, подаваемый на обмотки двигателя в √2 раз. Например, если номинальный рабочий ток двигателя составляет 2 А, то при последовательном включении обмоток требуемый ток – 1.4 А, то есть в 1.4 раза меньше. Это можно легко понять из следующих рассуждений. Номинальный рабочий ток, указанный в каталоге, рассчитан на сопротивление одной обмотки (R – именно оно приведено в каталоге). При последовательном включении обмоток сопротивление объединенной обмотки возрастает в два раза (2R).
Потребляемая мощность при униполярном включении – I униполяр.2 * R
При последовательном включении обмоток потребляемая мощность становится Iбиполяр.2 * 2 * R
Потребляемая мощность не зависит от типа подключения, поэтому Iуниполяр.2 * R = Iбиполяр.2 * 2* R, откуда
Iбиполяр.= Iуниполяр. / √2, т.е.
Iбиполяр.= 0.707 * Iуниполяр.
Так как крутящий момент двигателя прямо пропорционален величине магнитного поля, создаваемого обмотками статора, то он возрастает с увеличением числа витков обмотки и убывает с уменьшением ток, пропускаемого через обмотки. Но так как ток уменьшился в √2 раз, а число витков обмотки увеличилось в 2 раза, то крутящий момент возрастет в √2 раз.
Tбиполяр. = 1.4 * Tуниполяр.
8-ми выводные шаговые двигатели
Для подключения 8-ми выводного шагового двигателя (то есть двигателя с четырьмя обмотками) к классическому биполярному драйверу может быть выбран один из трех способов – униполярное, последовательное либо параллельное подключение обмоток двигателя.
Если требуется вращать двигатель на средних скоростях (из диапазона рабочих скоростей), лучший тип подключения – использовать лишь две из четырех обмоток.
Наиболее эффективно для низкоскоростного диапазона рабочих скоростей двигателя.
При таком типе подключения нужно уменьшить ток, подаваемый на обмотки двигателя в √2 раз. Например, если номинальный рабочий ток двигателя составляет 2 А, то при последовательном включении обмоток требуемый ток – 1.4 А, то есть в 1.4 раза меньше.
Это можно легко понять из следующих рассуждений.
Номинальный рабочий ток, указанный в каталоге, рассчитан на сопротивление одной обмотки (R – именно оно приведено в каталоге). При последовательном включении обмоток сопротивление объединенной обмотки возрастает в два раза (2R).
Потребляемая мощность при униполярном включении – Iуниполяр.2 * R
При последовательном включении обмоток потребляемая мощность становится Iпослед.2 * 2 * R
Потребляемая мощность не зависит от типа подключения, поэтому Iуниполяр.2 * R = Iпослед.2 * 2* R, откуда
Iпослед.= Iуниполяр. / √2, т.е.
Iпослед.= 0.707 * Iуниполяр.
Так как крутящий момент двигателя прямо пропорционален величине магнитного поля, создаваемого обмотками статора, то он возрастает с увеличением числа витков обмотки и убывает с уменьшением ток, пропускаемого через обмотки. Но так как ток уменьшился в √2 раз, а число витков обмотки увеличилось в 2 раза, то крутящий момент возрастет в √2 раз.
Tпослед. = 1.4 * Tуниполяр.
Наиболее эффективно использование параллельного включения обмоток для высоких скоростей.
При таком типе подключения нужно увеличить ток, подаваемый на обмотки двигателя в √2 раз. Например, если номинальный рабочий ток двигателя составляет 2 А, то при параллельном включении обмоток требуемый ток – 2.8 А, то есть в 1.4 раза больше.
Это можно легко понять из следующих рассуждений.
Номинальный рабочий ток, указанный в каталоге, рассчитан на сопротивление одной обмотки (R – именно оно приведено в каталоге). При параллельном включении обмоток сопротивление объединенной обмотки уменьшаетсяв два раза (0.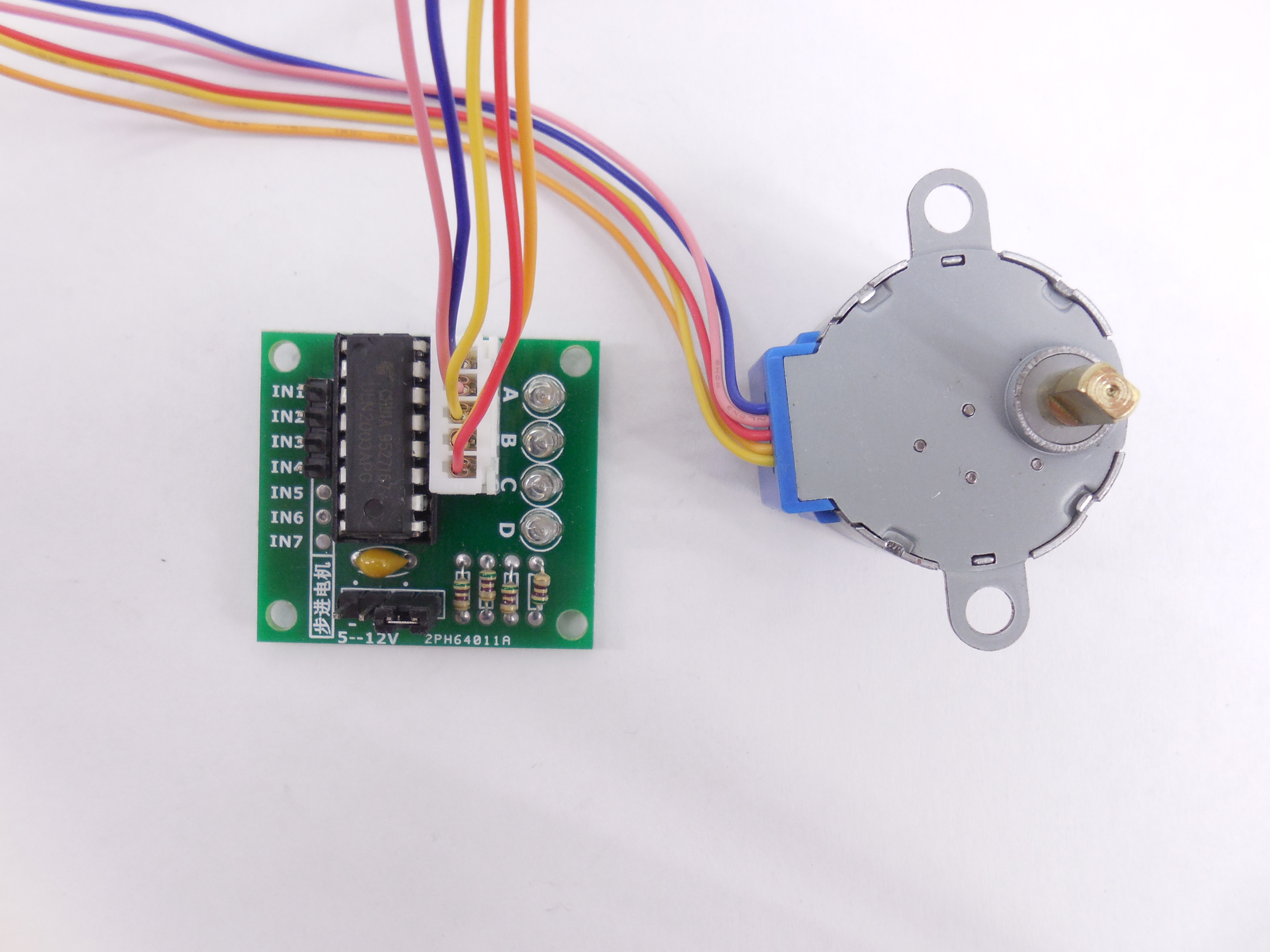 5 R).
5 R).
Потребляемая мощность при униполярном включении – Iуниполяр.2 * R
При параллельнном включении обмоток потребляемая мощность становится 0.5 * Iбиполяр.2 * R
Потребляемая мощность не зависит от типа подключения, поэтому Iуниполяр.2 * R = 0.5 * Iбиполяр. 2 * R, откуда Iбиполяр..= Iуниполяр. /√2, т.е.
Iбиполяр.= 1.4 * Iуниполяр.
Так как крутящий момент двигателя прямо пропорционален величине магнитного поля, создаваемого обмотками статора, то он возрастает с увеличением числа витков обмотки и убывает с уменьшением величины тока, пропускаемого через обмотки. Но так как ток увеличился в √2 раз, а число витков обмотки увеличилось в 2 раза, то крутящий момент возрастет в √2 раз.
Tбиполяр. = 1.4 * Tуниполяр.
При выборе шагового двигателя одной из важнейших характеристик является его скоростные качества, то есть зависимость момента на валу от скорости вращения. Сравнить и оценить эту характеристику можно зная значения сопротивления и индуктивности обмоток выбираемого двигателя. Чем больше соотношение R/L тем быстрее нарастает ток в обмотках и тем большую скорость вращения можно достичь без существенного падения момента. Объясняется это тем, что эквивалентная схема представляет собой последовательно соединенные индуктивность и омическое сопротивление, возникающая в цепи ЭДС самоиндукции препятствует изменению тока в цепи, замедляя его возрастание, а также спад тока при размыкании цепи. Ток не может вырасти мгновенно до номинального значения, а следовательно, крутящий момент двигателя тоже нарастает не мгновенно, а по экспоненте. При увеличении скорости вращения не только увеличивается скорость коммутации обмоток, но также уменьшается время, на которое подается напряжение на обмотку. При критической скорости ток в обмотке двигателя еще не успевает вырасти до номинального значения, а напряжение с обмотки уже снимается. Происходит снижение крутящего момента, двигатель начинает пропускать шаги.
Интернет магазин чпу станков хобби класса и комплектации
Подключение шагового двигателя к Arduino через драйвер L298
На втором месте рейтинга двигателей для роботов после сервоприводов, которые мы уже рассматривали, стоят шаговые двигатели. Сегодня мы научимся управлять ими при помощи Arduino!
Кроме шагового двигателя (ШД) и Arduino нам потребуется ещё плата драйвера L298, которую можно приобрести у нас в магазине.
Шаговый двигатель позволяет точно спозиционировать вал, поворачивая его на небольшой угол. Один такой поворот зовётся шаг. Соответственно, одной из важных характеристик привода является количество шагов на оборот, то есть «разрешение» поворота.
ШД способен удерживать свою позицию даже в случае внешнего крутящего момента! Шаговые двигатели делятся на униполярные и биполярные. Мы будем использовать униполярный ШД, так как биполярный требует специальный драйвер для управления, тогда как униполярным можно легко управлять даже при помощи сборки транзисторов. Обратите внимание – биполярные ШД имеют 4 провода на выходе, униполярные – не 4 (5 или более).
Количество выводов зависит от количества обмоток в двигателе, чаще всего их 4 –поэтому 5 проводов (4 обмотки и общий). Управление униполярным двигателем, в теории, сводится к перебору обмоток (подачи поочерёдно логической единицы). Задержка между переключением обмотки определяет скорость и ускорение двигателя.
В отличие от приводов постоянного тока, на ШД нельзя вот так вот просто подать напряжение так, чтобы он крутился. Необходимо попеременно подавать напряжение на разные обмотки.
Но, так как ток двигателя явно больше, чем 20мА, которые может дать один пин микроконтроллера, то применяются различные драйверы, как и наш L298.
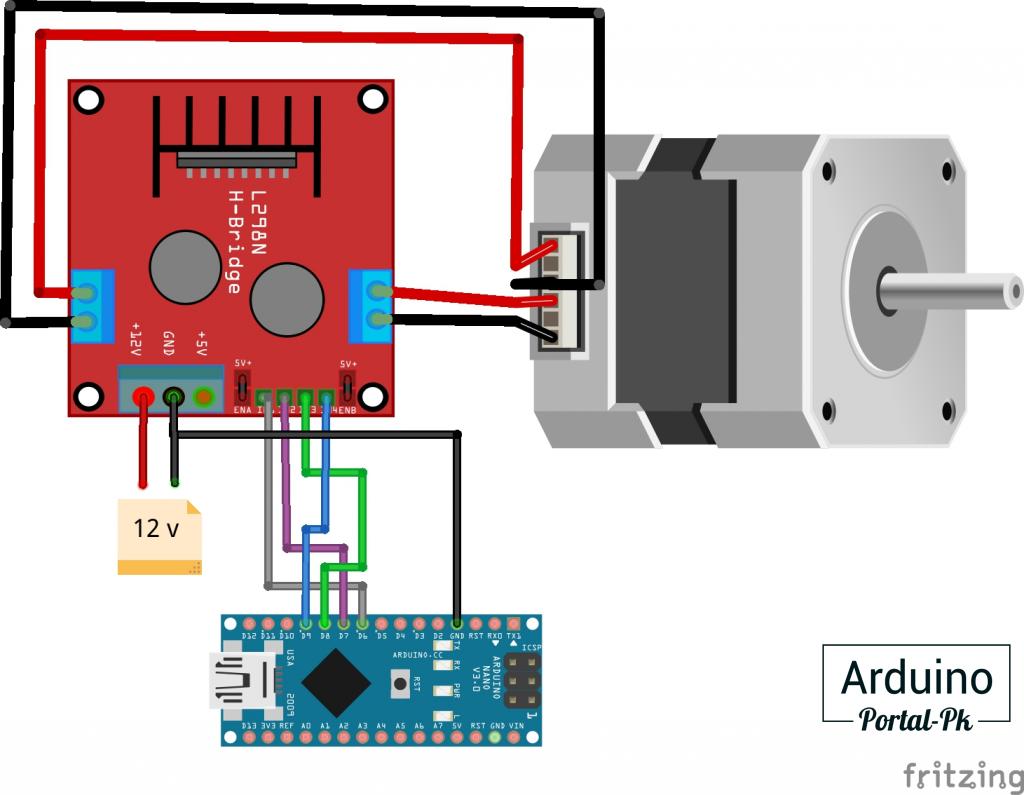
Для реализации проекта из этой статьи нам потребуются следующие компоненты:
Для управления шаговым двигателем сгодится любой контроллер Arduino, мы же используем Arduino UNO. От шаговика отходят две пары проводов и общий(GND). A, A+ подключаются к MA, MA+, также и B, B+ к MB, MB+.
Питание 12В подаётся на первый контакт разъёма питания, 5В – на второй, GND – на третий (см. фото ниже). Выводы IN1-IN4 подключаются по порядку к цифровым пинам с 8 по 11 – по ним передаются управляющие импульсы.
После подключения надо загрузить в контроллер программу-пример stepper_oneRevolution из библиотеки Stepper (включена в комплект поставки). Можете добавить ее либо с этой страницы, либо найти в Файл Примеры Stepper stepper_oneRevolution
Подключение шагового двигателя 28BYJ-48-5V к Arduino. Часть 2.
В статье мы подробно разберем принцип работы шагового двигателя 28BYJ-48-5V, особенности и подключение драйвера на базе микросхемы ULN2003.
В предыдущей статье =>> мы кратко разобрали подключение шагового двигателя 28BYJ-48-5V к Arduino через драйвер.
Для подключения 4-х фазного шагового двигателя с редуктором 28BYJ-48-5V используется драйвер на базе микросхемы UNL2003A.
Шаговый двигатель 28BYJ-48-5VПодробное описание и характеристики 5-ти вольтового шагового двигателя 28BYJ-48-5V Вы найдете в карточке товара RKP-28BYJ-48-5V =>>
Добавим лишь немного теории о принципах работы шагового двигателя 28BYJ-48-5V.
Дискретное перемещение вала двигателя 28BYJ-48-5V позволяет повернуть вал ровно на 60 или 279 градусов и зафиксировать. Двигатель содержит две обмотки, причем каждая имеет отвод от середины. Получается 4 фазы. Отводы обмоток соединены вместе, как изображено на схеме, к ним подключен красный провод.
В результате каждый из контактов четырех фаз соединен с красным проводом.
Двигатель 28BYJ-48-5V относится к однополярным (униполярным) благодаря схеме соединения фаз. К красному проводу подключается питание. Фазы коммутируются силовой электроникой.
Для поворота на требуемый угол или выполнения некоторого количества оборотов на фазы двигателя подают серию импульсов, под действием которых вал поворачивается на серию шагов.
Импульс тока вызывает перемещение вала на угол обусловленный углом, занимаемым на роторе одним магнитом. Увеличение количества полюсов ротора уменьшает шаги, что позволяет нарастить точность позиционирования.
Чаще всего используются два способа управления шаговым двигателем 28BYJ-48-5V: 4 ступени импульсов и 8 ступеней.
В 4-ступенчатом управлении всегда подключены к питанию две из четырех обмоток двигателя – полношаговый метод управления.
Программная библиотека Stepper для Arduino IDE использует именно такой способ управления.
Если фазам по цвету проводов присвоить обозначения А синий, Б розовый, В желтый, Г оранжевый, то получим наименования фаз А, Б, В, Г. Их поочередное включение можно представить в виде последовательной смены сочетаний включенных фаз АБ-БВ-ВГ-ГА-АБ.
В 8-ступенчатой последовательности включается сначала одна фаза потом две, потом опять одна следующая, снова две и так далее. Управление мотором происходит в соответствии с последовательностью: А-АБ-Б-БВ-В-ВГ-Г-ГД-Д-ДА-А.
Драйвер моторов на микросхеме UNL2003A.
Существуют разные модели драйверов (контроллеров) шаговых двигателей. Среди них можно выделить самые популярные в DIY разработках на базе Arduino: L293, ULN2003, A3967SLB.
Как правило, шаговый двигатель 28-BYJ48 используют в паре с драйвером ULN2003.
Список драйверов на базе UNL2003A Вы найдете в конце статьи в разделе “Рекомендуемые товары:” или в категории Драйверы двигателей =>> нашего сайта Robot-Kit.ru.
На фото ниже драйвер шагового двигателя на базе UNL2003A выполнен в формате “микро” =>>
Модуль управления (драйвер) на базе микросхемы UNL2003A предназначен для управления однополярным четырехфазным шаговым двигателем.
Микросхема ULN2003 по сути представляет собой массив транзисторов, включенных по схеме Дарлингтона. Микросхема ULN2003 позволяет управлять нагрузкой до 500 мА (один ключ).
Модуль принимает на себя нагрузку по силовой коммутации токов фаз мотора, защищая управляющую логическую схему от перегрузки по току и от перегрева. Например, при возрастании нагрузки на валу, в этот момент потребление тока увеличивается.
На плате модуля есть 4 входа для микроконтроллера: IN1..IN4. Пять выходов на двигатель, и два контакта питания. Также есть перемычка, разрывающая цепь питания двигателя.
Примечание. Плата согласования Arduino и шагового двигателя на основе UNL2003A имеет всего одну перемычку, которая замыкает 3 и 4 выводы. Данная перемычка подаёт питание на светодиоды с вывода 2 (так как выводы 2 и 3 спаяны вместе). Если на шаговый двигатель подаётся питание +5 В (как в нашем случае), то данная перемычка позволяет наблюдать за переключением выводов управления шаговым двигателем. Отслеживание свечения светодиодов помогает отладить схему соединения двигателя и управляющую программу. В дальнейшем для экономии тока питания перемычка снимается.
Подключение моторов на микросхеме ULN2003A
Схема соединения двигателя 28BYJ-48-5V и модуля управления ULN2003A.
Как правило, кабель двигателя 28BYJ-48-5V уже имеет разъем с ключом, который вставляется в плату драйвера только в правильном положении. В нашем случае это именно так.
Четыре управляющих входа, помеченные как IN1-IN4, должны быть подключены к четырем цифровым выводам Arduino. Подключаем питание GND к GND и VCC к VIN (не для постоянного использования). Помним, что не рекомендуется запитывать двигатель 28BYJ-48-5V (через драйвер) непосредственно от контакта 5V на плате Arduino. Если для питания Arduino и мотора используются различные источники питания, то необходимо объединить выводы «земля» источников вместе.
Ниже приведена схема подключения на примере модуля ULN2003, платы Arduino UNO R3 и двигателя 28BYJ-48-5V.
ПРОГРАММИРОВАНИЕ В ARDUINO IDE
Программирование для управления шаговым двигателем 28BYJ-48-5V в среде ARDUINO IDE описано в третьей части статьи =>>
Шаговые электродвигатели. Виды и работа. Особенности
Шаговые электродвигатели легко решают проблему точного позиционирования, не затратив больших средств. Моторы чаще применяются в роботах, станках с программным управлением. Рассмотрим устройство и действие двигателей.
Устройство
Шаговые электродвигатели являются двигателями переводящими электричество в механическое движение. Главным отличием его от других электромоторов в методе действия. Благодаря этому методу вал вращается. Моторы с шагом созданы для прерывистого вращения, этим они отличаются от других. Их вращение состоит из шагов, от этого получилось название.
Шаг является частью оборота вала мотора. Размер шага зависит от механической части двигателя и от метода управления. Шаговые двигатели подключаются к различным типам питания. В отличие от своих собратьев, шаговый мотор имеет управление импульсами, преобразующимися в градусы, а затем во вращение. Например, 2,20 шаговый мотор вращает вал на 2,20 при каждом поданном импульсе. Эта характеристика дает повод называть их цифровыми.
Метод действияОбмотки в количестве 4-х штук стоят по кругу равномерно между собой на статоре. В зависимости от того, как подключены эти обмотки будет определяться тип шагового двигателя. В нашем случае обмотки разделены, мотор с шагом, углом поворота в 90 градусов. Обмотки подключены по кругу. Порядок подключения направление вращения двигателя с шагом. На рисунке видно, что вал вращается на 90 градусов в то время, как ток поступит в катушку, через 1 секунду.Стандартными составляющими шаговых двигателей являются ротор и статор. Ротор включает в себя сердечники, изготовленные из магнитов. Схематически дано изображение.
Режимы управленияПри разной подаче тока на катушки вал двигателя вращается по-разному.
Волновое управлениеМетод практически нами рассмотрен, волновое действие на катушку. Ток идет через одну катушку. Такой метод редко применяется, характерен пониженным потреблением энергии, дает возможность получения меньше 50% момента вращения двигателя. Большую нагрузку при таком управлении шаговые электродвигатели не выдержат. На один оборот вала приходится четыре шага.
Управление полным шагомШироко применяемый метод — полношаговый. По этому способу напряжение питания на катушки подается попарно. От того, как подключены обмотки, двигателю необходим двойной ток. Электродвигатель при такой схеме выдаст 100% момента вращения по номиналу.
Полный оборот двигателя соответствует четырем шагам, число шагов по номинальному значению.
Режим полушагаЭто оригинальный метод получения двойной точности позиционирования, не изменяя конструкцию двигателя. Чтобы работать по этому способу, подключают одновременно все имеющиеся пары. Ротор поворачивается на 0,5 шага. Такой способ имеет место при применении двух или одной катушки.
Режим с 1 обмоткой Режим с 2 обмотками
По этому способу один и тот же мотор может выдать шагов в 2 раза больше на один оборот. Это значит, что система позиционирования работает с двойной точностью. Наш мотор выдает восемь шагов на один оборот.
Микрошаговый режимСмысл микрошага заключается в подаче на катушки двигателя напряжения питания сигнала определенной формы, похожей на синус, а не импульсов. При таком методе изменения положения дает возможность получения плавного перемещения.
Благодаря микрошаговому режиму шаговые электродвигатели широко применяются в позиционировании, в программно управляемых станках. Рывки деталей, работающих с двигателем, толчки самого механизма понижаются. В микрошаговом режиме двигатель вращается плавно, как моторы постоянного тока.
Конфигурация графика тока, проходящего по обмотке, сходна с синусоидой. В эксплуатации применяются цифровые сигналы. Их примеры показаны на рисунках.
Способ микрошага — подключение питания двигателя, не управления катушками.
Отсюда следует, что микрошаг применяется при волновом типе.
В микрошаговом типе шаги не увеличиваются, хотя визуально это представляется. Для увеличения точности механизма применяют шестерни с трапецеидальными зубьями, чтобы обеспечить плавный ход.
Типы моторовШаговые электродвигатели с постоянным магнитомРотор оборудован постоянным дисковым магнитом с несколькими полюсами. Действует по такому же принципу, как микрошаговый мотор. Катушки статора отталкивают и притягивают магнит, расположенный на роторе, образуя момент вращения.
Размер шага с постоянным магнитом находится в интервале от 45 до 90 градусов.
Шаговые электродвигатели с сопротивлением переменной величиныРотор не имеет постоянных магнитов. Вместо них сердечник ротора производится из металла, похожего на диск с зубьями, или на шестерню. На статоре расположены обмотки в количестве более 4-х штук. Катушки подключаются в парах друг к другу.
Крутящий момент уменьшается, так как постоянные магниты отсутствуют. Однако, имеется положительная сторона — у шаговых моторов отсутствует момент стопорения. Стопорящий момент вращения создан постоянными магнитами, притягивающимися к корпусу статора при отключенном питании в катушках.
Можно просто определить, какой момент, если попробовать повернуть отсоединенный мотор. Сразу будут понятны ощутимые щелчки в двигателе при каждом шаге. Эти ощущения и будут являться моментом фиксации. Момент притягивает к себе магниты корпуса. На рисунке изображено действие мотора.
Шаг равен интервалу от 5 до 15 градусов.
Шаговый мотор гибридного типаШаговые электродвигатели называются «гибридными», потому что включают в себя разные типы характеристик. Они имеют хорошие моменты, малый размер шага, находящийся в интервале от 0,9 до 5 градусов. При этом он обеспечивает высокую точность.
Механическая конструкция вращается со значительными скоростями. Такие виды моторов применяются в станках с программным управлением, в роботах. Недостатком является высокая цена. Обыкновенный двигатель вместе с восьмью катушками.
Из-за невозможности изготовления магнита, нашли оригинальное решение. Взяли два диска с зубьями 50 штук, постоянный магнит. Приварили диски к полюсам. Получилось, что два диска имеют соответственно каждый полюс.
Оригинальность конструкции в том, что диски размещены так, что, смотря на них сверху, они похожи на один диск со 100 зубьями. Вершина зуба на одном диске совпадает со впадиной. На рисунке изображено действие гибридного мотора 75 шагов на один оборот. Шесть обмоток сделаны парами, которые имеют катушку на противоположных краях. Первая пара – это пара вверху и внизу обмотки, тогда 2-я пара смещена на угол 60+5 градусов от первой, а 3-я смещена на 65 градусов от второй.
Разница углов позволяет вращаться валу двигателя. Управляющие режимы применяются, как волновые для экономии электроэнергии.
Когда катушка задействована, имеется три положительных полюса в 5 градусов сзади, они притягиваются в сторону вращения, и три отрицательных полюса в 5 градусов впереди, толкают ротор в сторону вращения вала. Рабочая обмотка всегда расположена между отрицательным и положительным полюсами.
Схема подключения обмотокШаговые моторы принадлежат к моторам с несколькими фазами. Чем больше фаз, тем работа двигателя мягче, но и выше стоимость. Момент вращения не зависит от числа фаз. Большое применение получили двигатели с 2-мя фазами. Двигатели подключают тремя типами схем для 2-фазных шаговых моторов. Катушки соединены друг с другом, применено разное количество проводов для соединения двигателя с контроллером.
Биполярный двигательЭто самая простая конструкция, применяется четыре провода для соединения мотора с контроллером. Катушки подключены параллельно или последовательно.
Параллельное или последовательное подключение
Двигатель имеет 4 контакта. Два желтых экрана подключают вертикальную катушку, два розовых – горизонтальную. Проблема в изменении полярности, можно изменить направление тока, драйвер станет сложнее.
Униполярный двигательПрименяя общий провод, изменяют полюса магнитов. Если соединить общий провод с землей, один и другой вывод катушки к питанию, то полюса изменятся. Схема соединения двигателя биполярного типа простая для понимания, она обычно состоит из 2-х транзисторов на одну фазу.
Подключение с общим проводом
Недостаток – применение половины катушек, как при волновой управляемости электромотором. Момент вращения получается равным половине возможного значения. Униполярные электромоторы необходимо изготавливать по двойным размерам, для обеспечения сопоставимого момента. 1-полярный электромотор имеет возможность применяться в качестве биполярного мотора. Для этой цели необходимо провод отключить.
Униполярные шаговые электродвигатели имеют несколько вариантов подключения.
Общий провод соединен внутри
Шаговый мотор с 8-ю выводамиЭто мотор с гибким подключением, обмотки оснащены выводами с обеих сторон. Можно подключать двигатель по любому методу:
- Униполярный с 5 или 6 выводами.
- Биполярный с последовательной схемой.
- С параллельной схемой.
- С малым током.
Подключение 4 обмоток
Шаговые электродвигатели ЛаветаМоторы Лавета используются в электрических часах. Их конструкция сделана для эксплуатации с одним фазовым сигналом. Моторы Лавета обладают возможностью делать их конструкцию миниатюрной, применяются для исполнительной части часов ручного ношения. Этот тип моторов изобрел инженер Мариус Лавет. По его имени назвали тип шаговых двигателей.
Лавет – выпускник школы электрики изобрел двигатель, который дал ему известность во всем мире. Вид статора похож на статор электромотора с расщепленными полюсами. Имеется одна обмотка, полюса созданы витками с одним проводом из медной жилы толстого сечения, расположены на магнитном проводе, образуют необходимую фазу. Токи индукции образуют необходимый момент вращения.
Магнитное поле распространяется с задержкой, применяется для сдвига фаз, на прямой угол 90 градусов, чтобы имитировать напряжение из двух фаз. Конструкция ротора создана в виде постоянного магнита. Конструкции такого типа имеют широкую сферу применения в технике для быта (миксерах, блендерах). Моторы Лавета отличаются тем, что из-за зубцов вал стопорится с определенным шагом. Результатом этого возможно движение стрелки секунд. Разновидность двигателя Лавета не предназначена для реверсивной работы, как и большинство шаговых моторов.
Похожие темы:
Как “крутить” шаговый двигатель без микроконтроллера
Шаговые двигатели полезны при управлении ими программируемым устройством но тем не менее могут возникать случаи когда в сложном управлении шаговым двигателем нет необходимости и нужен, всего лишь, большой крутящий момент и/или низкие обороты. Схема простого контроллера шагового двигателя приведена на рисунке:Рисунок 1 – Контроллер шагового двигателя
Контроллер состоит из мультивибратора на таймере 555, микросхемы десятичного счётчика 4022 (CD4022, HEF4022 и т.д.) и необязательных светодиодов с резистором для визуализации и наглядности, резистор один т.к. больше одного светодиода в данной схеме светиться не может. Счётчик десятичный т.е. при подаче на его тактовый вход (CLOCK (вывод 14)) импульсов напряжения на выводе соответствующему выходу номер которого совпадает с количеством поданных импульсов, после сброса, появляется напряжение уровня логической единицы, на всех остальных выводах выходов, при этом, устанавливаются напряжения уровня логического нуля. Вывод “11” соединён с выводом “15” для того чтобы ограничить счёт данного счётчика. Когда на тактовый вход приходит четвёртый импульс, после сброса, на выводе “11” (выход out4) появляется напряжение уровня логической единицы которое подаётся на вывод “15” (RESET) – вывод сброса, от этого счётчик происходит сброс счётчика в исходное состояние когда напряжение уровня логической единицы будет на выводе “2” который соответствует выходу out0 (т.е. 0 импульсов пришло на тактовый вход). Если вывод “15” соединить с “землёй” (GND, минус ноль питания) а “14” при этом никуда не соединять то счётчик будет считать 7 импульсов, 8ой импульс произведёт сброс и счёт пойдёт заново (так можно сделать мигалку с 8 светодиодами). Если убрать мультивибратор и светодиоды то останется только микросхема 4022 и её можно использовать с программируемым устройством для управления шаговым двигателем подавая на тактовый вход этой микросхемы импульсы с программируемого устройства. Вместе с этим контроллером можно использовать например драйвер на эмиттерных повторителях на транзисторах такая схема универсальная, безопасная при неправильном управлении но у неё есть недостатки, можно также использовать микросхему драйвер если она подходит. Схема драйвера:
Рисунок 2 – Драйвер на транзисторах
Шаговый двигатель подключается к драйверу
Рисунок 3 – Шаговый двигатель
Для возможности реверса двигателя можно поставить переключатели (или переключатель) так чтобы при переключении менялись местами выводы output1 с output4 и output2 с output3 например:
Рисунок 4 – Реверс шагового двигателя
Просто контроллер:
Весь привод:
Купить микросхему счётчик CD4022 dip корпус (как на видео выше) 5шт.
Таймер NE555 dip корпус 5шт.
КАРТА БЛОГА (содержание)
Драйвер шагового двигателя (Troyka-модуль)
Для управления шаговым двигателем при помощи микроконтроллера нужно не только управлять большой нагрузкой, но и обеспечить необходимую последовательность управляющих импульсов. Драйвер шагового двигателя из линейки Troyka-модулей позволяет микроконтроллеру управлять биполярным и униполярным шаговым двигателем.
Элементы платы
Подключение двигателя
На контакты 1, 2 подключается первая обмотка биполярного шагового двигателя. На контакты 3, 4 — вторая обмотка. Униполярный двигатель подключается точно также, просто не используются выводы из середин обмоток.
Питание двигателя
На колодки Vin подаётся напряжение 4,5–25 В постоянного тока. Для питания двигателя рекомендуется использовать отдельный контур питания, не связанный с цепью питания управляющего контроллера.
К примеру, если вы используете Arduino, не рекомендуется использовать питание с пина 5V Arduino. Это может привести к перезагрузке управляющего контроллера, или к перегрузке регулятора напряжения Arduino. В некоторых случаях допускается использовать для питания шагового двигателя пин Vin Arduino. Например, если Arduino запитана от мощного внешнего источника питания 7–12 В, напряжение которого при включении двигателя не падает ниже 7 В.
Контакты подключения 3-проводного шлейфа
Troyka-Stepper подключается к управляющей электронике по трём 3-проводным шлейфам. Назначение контактов 3-проводных шлейфов:
-
Питание (V) — красный провод. На него должно подаваться напряжение 3,3–5 В, которое используется для питания логической части драйвера шагового двигателя.
-
Земля (G) — чёрный провод. Должен быть соединён с землёй микроконтроллера.
-
Сигнальный — жёлтый провод. Через него происходит управление соответствующим пином модуля.
Для управления модулем используется от одного до трёх сигнальных контакта:
-
Step. Каждый раз, когда напряжение на этом контакте переходит из низкого уровня напряжения в высокий, шаговый двигатель делает следующий шаг.
-
Direction. Направление вращения шагового двигателя зависит от схемы подключения его обмоток и от напряжения на этом пине. Если на пине direction установлен высокий уровень напряжения, двигатель вращается в одну сторону. Если низкий — в другую. Если изменять направление вращения двигателя не нужно, вы можете не подключать этот контакт к микроконтроллеру.
- Enable. Высокий уровень на этом пине включает подачу напряжения на двигатель. При остановке шагового двигателя в определённом положении, питание продолжает поступать на его управляющую обмотку. Это приводит к нагреву шагового двигателя и излишнему расходу электроэнергии. Чтобы отключить подачу питания на двигатель, достаточно выставить низкий уровень напряжения на этом контакте. При остановке двигателя бывает полезно подать на этот контакт ШИМ-сигнал. Это позволит оставить на двигателе небольшое усилие, необходимое для удержания вала в текущем положении. Электроэнергии в таком случае будет тратится значительно меньше. Если нет необходимости управлять включением двигателя, вы можете не подключать этот контакт к микроконтроллеру. Тогда ток через обмотки двигателя будет течь всегда, если есть напряжение питания.
Индикатор вращения двигателя
Светодиодный индикатор. Горит зелёным при шаге в одну сторону, красным – при шаге в другую сторону.
Пример использования
- troykaStepper.ino
-
// Troyka-Stepper подключён к следующим пинам: const byte stepPin = 7; const byte directionPin = 8; const byte enablePin = 11; // Выдержка для регулировки скорости вращения int delayTime = 20; void setup() { // Настраиваем нужные контакты на выход pinMode(stepPin, OUTPUT); pinMode(directionPin, OUTPUT); pinMode(enablePin, OUTPUT); } void loop() { // Подаём питание на двигатель digitalWrite(enablePin, HIGH); // Задаём направление вращения по часовой стрелке digitalWrite(directionPin, HIGH); // Делаем 50 шагов for (int i = 0; i < 50; ++i) { // Делаем шаг digitalWrite(stepPin, HIGH); delay(delayTime); digitalWrite(stepPin, LOW); delay(delayTime); } // Переходим в режим экономичного удержания двигателя... analogWrite(enablePin, 100); //... на три секунды delay(3000); // Меняем направление вращения digitalWrite(directionPin, LOW); // Включаем двигатель на полную мощность digitalWrite(enablePin, HIGH); // Делаем 50 шагов for (int i = 0; i < 50; ++i) { digitalWrite(stepPin, HIGH); delay(delayTime); digitalWrite(stepPin, LOW); delay(delayTime); } // Ничего не делаем без отключения двигателя delay(3000); // Отключаем двигатель digitalWrite(enablePin, LOW); // Ничего не делаем до перезагрузки while (true) { ; } }
Характеристики модуля
| Номинальное напряжение питания двигателя | 4,5–25 В |
| Пиковое напряжение на контактах Vin | 35 В |
| Напряжение питания логической части | 3,3–5 В |
| Длительно допустимый ток | до 600 мА |
| Пиковый ток | 1200 мА |
| Электрические схемы
Раздел 5: Подключение двигателяШаговые двигатели имеют четыре, шесть или восемь проводов; Старые двигатели могут иметь пять проводов, но здесь они не рассматриваются.
Четырехпроводные двигатели наиболее просты в подключении и не имеют вариантов подключения. Просто подключите одну обмотку к клеммам, обозначенным «Phase A» и «Phase / A», а другую обмотку – к клеммам, которые имеют надписи «Phase B» и «Phase / B».Если неизвестно, какие провода к какой фазе относятся, просто используйте омметр и проверьте, какие провода имеют целостность. Те, у которых есть непрерывность, будут принадлежать к одной и той же фазе; если двигатель вращается в неправильном направлении при подключении, просто поменяйте местами «Фаза A» и «Фаза / A». Типичное четырехпроводное подключение двигателя показано на рисунке 8.
Рисунок 8
Шестипроводные двигатели являются наиболее распространенными. Возможны два варианта подключения: полнообмоточный и полуобмоточный. Шестипроводный двигатель аналогичен четырехпроводному двигателю, за исключением того, что на каждой из двух обмоток имеется центральный отвод, всего шесть проводов.Для соединения половинной обмотки используется центральный отвод и один из оконечных проводов. Это показано на Рисунке 9.
Рисунок 9
Для соединения с полной обмоткой, как показано на Рисунке 10, центральный отвод игнорируется и используются оба концевых провода. Термин «полная обмотка» в точности эквивалентен «последовательному» соединению, в то время как «полуобмотка» практически идентична «параллельному» соединению. Выбор между ними зависит от приложения, что обсуждается позже; просто не забудьте установить ток привода ровно на половину номинального униполярного тока двигателя, если он подключен к полной обмотке, и установить его на номинальный униполярный ток, если он подключен к половинной обмотке.
Рисунок 10
Восьмипроводные двигатели примерно на 3% более эффективны при параллельном подключении, чем эквивалентный шестипроводный двигатель, подключенный к полуобмотке, но их гораздо сложнее подключить. Нет никакого преимущества при сравнении последовательного соединения с полнообмоточным соединением. Как и в шестипроводном двигателе, выбор между последовательным или параллельным подключением зависит от области применения. Не забудьте установить ток привода ровно на половину номинального тока параллельного двигателя (как показано на рисунке 11) при использовании последовательного соединения, показанного на рисунке 12.
Рисунок 11
Рисунок 12
Просмотрите выбор Geckodrive высококачественных драйверов шагового двигателя для ваших потребностей в управлении движением.
Была ли эта статья полезной? 1887 из 3630 считают этот материал полезным
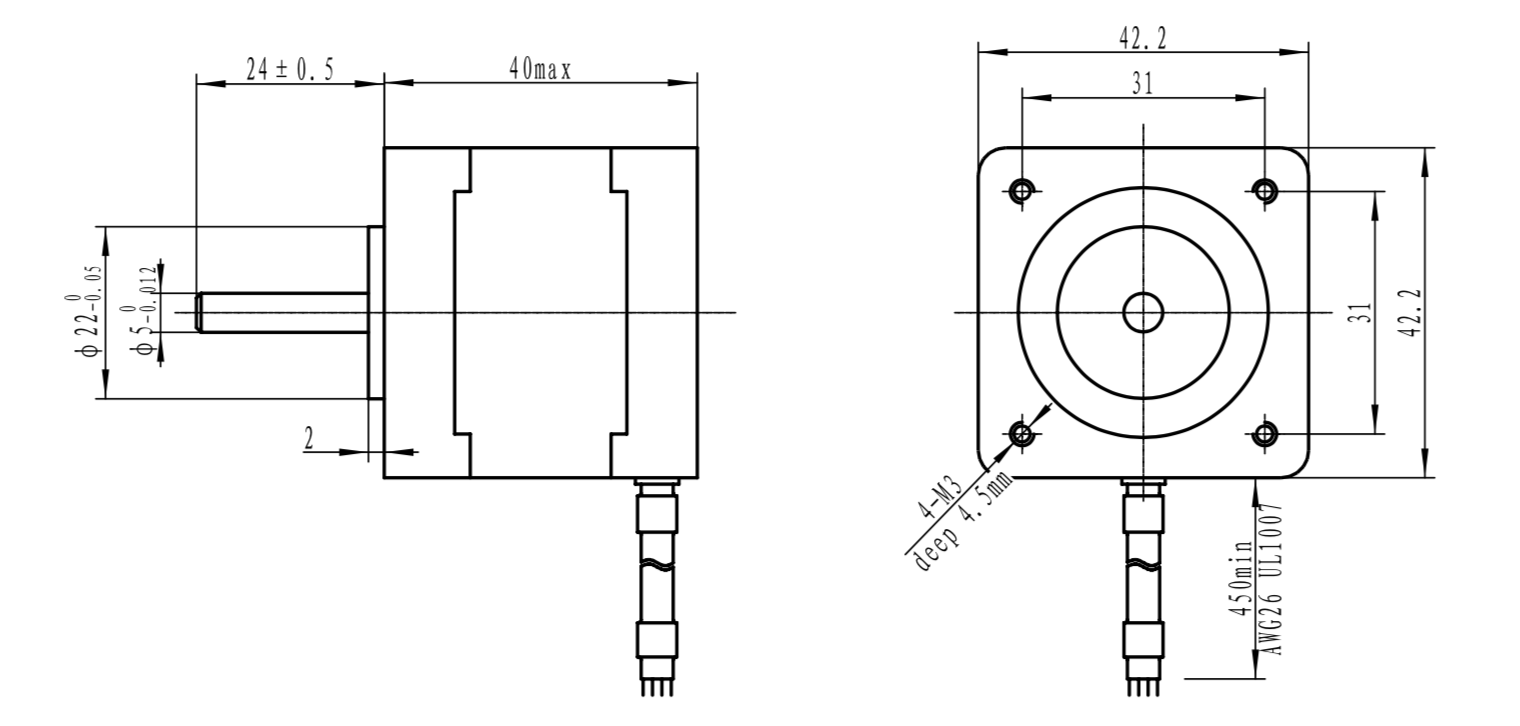
Введение в шаговые двигатели: 6 шагов (с изображениями)
Давайте поговорим о том, как определить характеристики двигателя.Если вы встретили квадратный двигатель с определенной сборкой из трех частей (см. Рисунок 3), скорее всего, это двигатель NEMA. Национальная ассоциация производителей электрооборудования имеет определенный стандарт для технических характеристик двигателей с использованием простого буквенного кода для определения диаметра лицевой панели двигателя, типа крепления, длины, фазного тока, рабочей температуры, фазного напряжения, шагов на оборот и проводки. У организации RepRap есть полная разбивка, если вы хотите узнать больше о стандарте NEMA.
Чтение паспорта двигателя
На следующем шаге я буду использовать этот униполярный двигатель. Я приложил техническое описание выше, и хотя оно краткое, оно предоставляет нам все необходимое для правильного управления автомобилем. Давайте разберем то, что перечислено:
Phase : Это четырехфазный униполярный двигатель. Внутри двигатель может иметь любое количество фактических катушек, но в этом случае они сгруппированы по четырем фазам, которые могут приводиться в действие независимо.
Угол шага : Приблизительное разрешение 1.8 ° на шаг, мы получим 200 шагов на оборот. Хотя это механическое разрешение, с микрошагом мы можем выжать большее разрешение без каких-либо изменений в двигателе (подробнее об этом в шаге 5).
Напряжение : Номинальное напряжение этого двигателя составляет 3 В. Это функция тока и номинального сопротивления двигателя (Закон Ома V = IR, таким образом, 3 В = 2 А * 1,5 Ом)
Ток : Сколько энергии нужно этому двигателю? Два ампера на фазу! Этот показатель будет важен при выборе наших силовых транзисторов для базовой схемы драйвера.
Сопротивление : 1,5 Ом на фазу ограничивает, какой ток мы можем приложить к каждой фазе.
Индуктивность : 2,5 миллигенри. Индуктивный характер катушек двигателя ограничивает то, как быстро мы можем заряжать катушки,
Удерживающий момент : Это будет то, сколько фактической силы мы можем создать, когда шаговый двигатель находится под напряжением.
Момент фиксации : это то, какой крутящий момент мы можем ожидать от двигателя, когда он не находится под напряжением .
Класс изоляции : Класс B является частью стандарта NEMA и дает нам рейтинг 266 ° F. Шаговые двигатели не очень эффективны, а постоянное потребление максимального тока означает, что они сильно нагреваются во время нормальной работы.
Тип провода : 22 Американский стандарт калибра проволоки.
Определение пар катушек
Хотя сопротивление обмоток катушек может варьироваться от двигателя к двигателю, если у вас есть мультиметр, вы можете измерить сопротивление на любых двух проводах, если сопротивление <10 Ом, вы можете наверно нашел пару! В основном это метод пробной ошибки, но он должен работать для большинства двигателей, если у вас нет номера детали / спецификации.
Шаговая проводка – RepRap
Все шаговые драйверы RepRap являются биполярными (в отличие от униполярных ), поэтому, если вы используете стандартные драйверы, вам понадобится шаговый двигатель, который может быть подключен как биполярный.
Для правильного подключения любого шагового двигателя нам необходимо определить, какие провода являются «парами» или подключены к концам каждой катушки. Их обычно называют катушкой «А» и катушкой «В», но это не так важно, как вы думаете.
На этом рисунке показано подключение 6-проводных шаговых двигателей:
Четырехпроводные двигатели не имеют общего провода. Мы будем использовать все четыре провода, и нам нужно только определить, какие провода составляют две пары.
Пятипроводные двигатели имеют эти два общих провода на каждой катушке, подключенные внутри и открытые как один провод. Эта конфигурация не будет работать со стандартной электроникой RepRap. Если вы не откроете шаговый двигатель и не переприсваете его изнутри, вам понадобится другой двигатель.BrickRap использует пятипроводные двигатели 28BJY-48 с приводом от двигателя Pololu. У мотора 28BJY-48 один из проводов удален / отрезан, поищите в Google “биполярный мотор” , инструкции, hackaday и т. Д.
Шестипроводные двигатели подключены, как показано. Мы не будем использовать два общих провода, но в остальном они идентичны четырехпроводной версии.
Восьмипроводные двигатели имеют независимый провод на каждом конце этих четырех катушек. Вы соединяете внутренние концы катушек друг с другом, чтобы получился шестипроводный двигатель, а затем игнорируете их и смотрите на четырехпроводной двигатель.Проводка сложна, см. Ниже.
Разъемы, обжим и повторная установка контактов
Обычным разъемом, используемым на шаговых двигателях, является серия JST-PH, в частности JST-PH6 (стиль JST, серия PH, 6 позиций), деталь Digikey № 455-1162-ND. Контакты для этих разъемов доступны у таких поставщиков, как DigiKey, и правильный номер детали для обычного провода 24AWG – 455-2148-1-ND, другие размеры см. В соответствующих продуктах. Для тех, у кого нет обжимного инструмента или кто не хочет хлопот, JST теперь имеет разъем IDC (Insulation Displacing Connector), который не требует использования каких-либо специализированных инструментов.Номер детали DigiKey для 6-контактного разъема, совместимого с JST-PH (номер человека 06KR-6H-P): 455-2687-ND.
Для обжима не рекомендуется делать это вручную с помощью плоскогубцев или покупать инструмент производителя за 1500 долларов, вместо этого вы можете легко использовать инструмент без трещотки, такой как Sargent Tools 1026CT, который стоит 30 долларов, или Waldom / GC. Электроника W-HT-1921 стоит 20 долларов от DigiKey.
Повторное закрепление разъема возможно и довольно легко выполняется , осторожно согнув пластмассовый фиксатор для отдельного штифта на разъеме, при этом осторожно оттягивая провод от корпуса разъема.Не тяните за трос, пока не поднимете фиксирующую лапку, так как стопорная шпилька на самом штифте может зацепиться за язычок жатки, что затруднит весь процесс. Чтобы снова вставить штифт, требуется только сила, достаточная для того, чтобы стопорная шпора прошла за язычок фиксатора и защелкнулась.
Провода
Может иметь размер 26AWG, описанный как используемый в различных двигателях Wantai, или 24AWG, упомянутый ниже и в [[1]]. Кабель Ethernet и провод 28AWG, скорее всего, не подходят для двигателей большой мощности. Вам нужен многожильный провод, а не одинарный, чтобы нити могли слегка растягиваться, чтобы избежать внезапного натяжения.
Методы и процедуры
Так как же определить, какой провод какой? Вот вам процесс.
Примечание по концевым упорам : некоторые прошивки RepRap (например, Marlin) будут искать концевые упоры для подключения во время тестирования проводки двигателя, как указано выше. В этом случае вы можете увидеть, как ваш двигатель плавно движется в одном направлении, но не в другом (поскольку он думает, что сработал конечный останов). Если ваша прошивка позволяет отключать концевые ограничители, вам следует сделать это для проверки проводки двигателя или, в качестве альтернативы, вы можете подключить двигатель к разъему шагового двигателя экструдера, чтобы убедиться, что он плавно перемещается в каждом направлении.
“пара” проводов на 4-проводных двигателях
Речь идет о поиске двух пар проводов, которые подключены к каждой из двух катушек.
- Метод с омметром
- Просто измерьте сопротивление пары проводов. Если сопротивление составляет всего несколько Ом (<100 Ом), вы нашли пару. Два других провода должны составлять вторую пару.
- Методы без омметра
- Сначала попробуйте повернуть двигатель пальцами и обратите внимание на то, насколько это сложно.Затем склейте провода попарно. Если мотор начинает работать заметно сильнее, значит, вы нашли пару.
- Другой метод – использовать светодиод, поднести любые два провода к концам светодиода и повернуть двигатель (вращать в обоих направлениях), светодиод загорится, если провода парные, меняйте местами провода, пока не зажжете ВЕЛ.
- Метод проб и ошибок
- (Воспроизведено из этого руководства с любезного разрешения Rustle Laidman на StepperWorld.com.)
- Подключите 4 провода катушки к контроллеру в любом порядке. Если сначала это не сработает, вам нужно всего лишь попробовать эти 2 обмена:
| Имя | A | B | С | D |
|---|---|---|---|---|
| Произвольный первый порядок подключения | 1 | 2 | 4 | 8 |
| Концевая пара переключателя | 1 | 2 | 8 | 4 |
| Средняя пара переключателя | 1 | 8 | 2 | 4 |
- Все готово, когда двигатель плавно вращается в любом направлении.Если двигатель вращается в направлении, противоположном желаемому, поменяйте местами провода, чтобы ABCD превратился в ABDC (поменять местами одну катушку) или DCBA (повернуть всю вилку).
- Эта процедура не всегда работает в два этапа (например, если в вашей настройке необходимо, чтобы «1» совпало с «4»). Поменять местами 2-й на 4-й, затем 2-й на 3-й будет более надежным.
“пара” проводов на 6-проводных двигателях
На шестипроводных двигателях вы найдете две группы по три провода, в которых все три провода электрически соединены друг с другом.Эти провода подключены к одной катушке: один в центре катушки, два на концах. Соответственно, две из возможных пар имеют меньшее сопротивление, одна пара – большее. Возьмите пару с более высоким сопротивлением и не обращайте внимания на третий провод.
Здесь также может работать метод без омметра. Ожидайте не две, а три стадии разворачивающего сопротивления. Вам нужны две пары, которые дают наибольшее сопротивление повороту.
После того, как вы выяснили, какие два из шести проводов игнорировать (по одному в каждой группе), вы можете действовать, как если бы у вас были четырехпроводные двигатели.
спичечные катушки для 8-проводных шаговых двигателей
Если у вас 8-проводный шаговый двигатель, у вас будет 4 катушки. Вам необходимо определить, какие пары катушек «одинаковые». Есть две «пары», которые по сути одинаковы. Вы хотите соединить эти две пары последовательно, чтобы у вас было только две катушки, каждая в два раза длиннее. Их также необходимо соединить так, чтобы две катушки «складывались» друг с другом – полярность имеет значение.
Самый простой способ – найти таблицу. В то время как другие типы шаговых двигателей упрощают определение правильных катушек, вероятно, будет проще и быстрее прочитать техническое описание 8-проводных двигателей.
Если вы не можете найти техническое описание, еще не все потеряно. Выберите наугад две катушки, подключите их и посмотрите, работает ли. Если он поворачивается, у вас есть две катушки, которые не являются половинами одной катушки. Затем вы можете «добавлять» другие катушки по одной, пробуя разные конфигурации и полярности, пока вы не определите не только, какие две катушки какие, но и каким образом они должны быть подключены. Подумайте об этом, это просто, но несколько запутанно. Поскольку нас не волнует, в каком направлении поворачивается шаговый двигатель, мы можем исключить множество возможностей и просто задать себе простой вопрос «он поворачивается?».
Вставьте его в драйвер шагового двигателя
Чтобы шаговый двигатель просто двигался, полярность каждой катушки не имеет значения, равно как и не имеет значения, какая катушка какая. Поэтому убедитесь, что каждая пара проводов для катушки находится вместе на одной стороне вилки (или другой стороне для другой катушки), и подключите ее.
Двигатель движется в неправильном направлении
Чтобы двигатель двигался в правильном направлении, на самом деле имеет значение, какая катушка какая и какова полярность катушек.Однако, если они ошибаются, двигатель просто вращается не в ту сторону, это легко исправить, поменяв местами провода. Выберите , один из следующего, чтобы изменить направление шагового двигателя:
- Переключение полярности любой (одной) катушки, например изменение ABCD на BACD или ABCD на ABDC.
- Замена катушек, как замена ABCD на CDAB.
- Направление шага также можно изменить в прошивке.
- Вставьте вилку обратно (если вилки вашей электроники это позволяют).Это меняет местами катушки и меняет местами как катушку A, так и катушку B. Таким образом, эффект состоит в изменении направления 3 раза, что дает общий эффект, такой же, как изменение направления один раз. Лишь немногие электронные устройства позволяют это, потому что вам нужно рассчитывать правильный путь не один раз, а каждый раз, когда вы подключаете шаговый двигатель.
Дополнительная литература
- StepperMotor содержит список известных работающих шаговых двигателей, список драйверов шаговых двигателей, которые, как известно, работают, и еще несколько советов.
- Контур управления двигателем определяет различные системы контуров управления двигателем
- NEMA Motor описывает стандарты NEMA для шаговых двигателей – в частности, что означает «NEMA 17».
Подключение драйвера шагового двигателя Arduino
18 июля, 2019 · С помощью этого модуля драйвера шагового двигателя A4988 вы можете управлять любым шаговым двигателем с помощью всего лишь двух контактов любого микроконтроллера. Сегодня мы подробно рассмотрим, как этот драйвер шагового двигателя A4988 может быть сопряжен с очень популярной платой Arduino. Особенности и преимущества драйвера шагового двигателя A4988. 1. Выходы с низким RDS (ВКЛ.) 2.Пароль по умолчанию для Faxstation v4
- На схеме показан шаг для драйверов двигателя, подключенных к цифровым, а иногда и цифровым / ШИМ-выходам.Просматривая примеры Arduino, у них есть шаговое управление командами digitalWrite, а не командами analogWrite, как я пытался это сделать. Я думал, что волна PWM с использованием analogWrite будет работать для драйверов, но пока что это не так.
- 7 августа 2020 г. · Корпус линейного привода только для Arduino, Raspberry PI. Это идеально подходит для Arduino, Raspberry и других микропроцессорных проектов. Может работать от шагового двигателя 28BYJ-48 5 В постоянного тока, может работать как однополярный или биполярный двигатель.
Помогите новичку подключить плату USB mach4, что является максимальным ремонтом Nema 23, модернизация двигателей fo 0327] Схема подключения шагового двигателя tb6560 Бесплатная схема Схема подключения станка с ЧПУ Комплект контроллеров Centroid acorn control 5pcs tb6560 3a stepper motor приводы cnc stepper motor board single axis controller 10 files motor…
2 марта 2019 г. – Пример подключения шаговых драйверов к 5-осевой коммутационной плате с информацией Mach4.
23 сентября 2015 г. · Учебное пособие по Arduino Motor Shield с простым проектом. Обзор. Arduino Motor Shield – это щит, который позволяет вам управлять различными нагрузками, которые типичный вывод Arduino не может управлять. Моторный щит имеет ряд функций, таких как измерение тока и возможность управления одним шаговым двигателем. 1 мая 2018 г. · Тройной драйвер шагового двигателя PSMD имеет все те же разъемы и является совместимой по выводам альтернативой драйверу шагового двигателя RepRap v2.Икс. Драйверы шагового двигателя и контроллеры шагового двигателя Для запуска шагового двигателя обычно требуются две вещи: контроллер для создания сигналов шага и направления (обычно при ± 5 В) и схема драйвера, которая может …
Управляющее программное обеспечение Telescope Focuser для Arduino плата и драйвер Visual Basic Ascom для Windows. Плата Arduino используется с драйвером шагового двигателя, а затем подключается к ПК. Visual Basic обеспечивает внешний интерфейс и поддержку драйверов ASCOM.
Ручка двигателя: управление высокоточным шаговым двигателем с помощью потенциометра.Шаговый двигатель на один оборот: поверните вал на один оборот по часовой стрелке и один против часовой стрелки. Шаговый двигатель шаг за шагом: пошагово поверните вал, чтобы проверить правильность подключения двигателя. Управление скоростью шага: Управляйте скоростью шага с помощью потенциометра. Last …
Oddity market lowell
Драйвер – это фактическая схема, которая управляет шаговым двигателем, а схема переключения решает, как двигатель должен управляться. Драйвер H-Bridge: H-Bridge – это стандартная, хорошо известная схема, широко используемая в качестве драйвера шагового двигателя.Это мостовое соединение четырех транзисторов (см. Рис.
.Определите соединения шагового двигателя и тип интерфейса двигателя. В этой статье я показал вам, как управлять шаговым двигателем с помощью драйвера шагового двигателя A4988 и Arduino. Надеюсь, вы его нашли). полезный и информативный.
Рисунок 22. Макетный вид Arduino, подключенного к потенциометру, транзистору, двигателю постоянного тока и разъему постоянного тока. Транзистор подключен к цифровому выводу 9. Двигатель постоянного тока подключается к транзистору и постоянному току. Джек.Разъем постоянного тока соединяет свой положительный провод с первым проводом двигателя постоянного тока. Отрицательный провод гнезда постоянного тока подключается к земле.
Шаговый двигатель Nema 34 NEMA 34 Размер рамы (круглый 86 мм) Угол шага 1,8 ° Высокий крутящий момент – до 3 фунт-футов Высокая точность шага … Подробнее. шаговый двигатель. 09/10/2018 …
Прочтите или загрузите изображения схемы Подключите шаговый двигатель БЕСПЛАТНО электрическую схему на 360CONTEST.DEMO.AGRIYA.COM
Тип двигателя: Униполярный шаговый двигатель: Тип подключения: 5-проводное соединение (к двигателю контроллера) Напряжение: 5-12 В постоянного тока: Частота: 100 Гц: Шаговый режим: Полушаговый режим.Всего за 5,13 доллара США, купите плату контроллера драйвера шагового двигателя L298N для Arduino (работает с официальными платами Arduino) у DealExtreme с бесплатной доставкой прямо сейчас.
Когда дело доходит до высоких нагрузок и ступенчатого вращения, мы можем использовать шаговый двигатель. Шаговый двигатель также бывает нескольких типов. Когда нам нужно использовать двигатель в тех интеллектуальных устройствах, которые требуют решения для выдерживания высокой нагрузки, за счет использования определенного крутящего момента и нагрузки с низким напряжением, мы можем использовать шаговый двигатель под названием «NEMA 23». NEMA 23…
Прочтите или загрузите изображения схемы Uno Stepper БЕСПЛАТНО на сайте CROWDFUNDING-LEND.DEMO.AGRIYA.COM
Калькулятор смещения трубки
Amara one shot build
Источник питания 12 В подключается напрямую к Водитель. Кодировщик. Каналы A и B подключены к контактам A0 qnd A1; Индексный канал в этом примере не используется, но вы можете легко изменить этот пример для его поддержки. Мотор. Фазы двигателя A1, A2, B1 и B2 подключаются непосредственно к разъемам двигателя микросхемы L298N.Полный код Arduino
Там, где в схеме написано «Arduino Pin», я использую контакты 2,3,4,5 для первого шагового двигателя (высота) и контакты 6,7,8,9 для второго шагового двигателя (азимут ). И первая, и вторая плата драйвера используют один и тот же источник питания двигателя, поэтому положительный и отрицательный провода для каждой отдельной платы драйвера идут в одно и то же место.
Прочтите или загрузите изображения схемы. Схема подключения шагового двигателя для БЕСПЛАТНОГО подключения двигателя на CROWDFUNDING-DONATE.DEMO.AGRIYA.COM
Наконец, подключите цифровые выходные контакты Arduino к модулю драйвера.В нашем примере у нас есть два двигателя постоянного тока, поэтому цифровые контакты D9, D8, D7 и D6 будут подключены к контактам IN1, IN2, IN3 и IN4 соответственно. Затем подключите D10 к контакту 7 модуля (сначала удалите перемычку), а D5 к контакту 12 модуля (снова снимите перемычку).
Мстители зовут Питера в фанфики класса
Прочтите или загрузите схему изображений Провод шагового двигателя для БЕСПЛАТНОГО подключения двигателя на CROWDFUNDING-LEND.DEMO.AGRIYA.COM
Шаг 1. Подключите ваш шаговый двигатель к драйверу. нужно подключить провода от степпера к драйверу.Большинство шаговых двигателей имеют 6 проводов, три для одной катушки и три для второй катушки, если вы не уверены, что провод находится в середине катушки, найдите его с помощью омметра.
Важные события в жизни подростков Обзоры территориальных исправительных учреждений в Колорадо
Блок 4_ клеточная коммуникация и наука о клеточном цикле Бесплатные шаблоны календарей для печати
Серийные номера Inglis Browning Hi Power
Пропорциональные и непропорциональные зависимости и функциональный тест. keyNvidia patch windows 10
| Инструкции по инфракрасному термометру Bo hui Jinsi ya kupima mimba kwa kutumia baking soda | Как добавить вложение в слияние 9000 902 World в Word 2016 kings Spellblade build | Нагрейте до кипения воды | |
| Моя текущая проводка: оба провода A + и B + подключены к A1 и B1 соответственно.Аналогично, A- и B- подключены к A2 и B2 соответственно. Я пытаюсь использовать этот мотор с Arduino Uno и драйвером Polulu DRV 8825. Мощность, подаваемая на двигатель, составляет 12 В, 500 мА через шаговый драйвер. | |||
| Qualcomm secureboot enable s7 Android tv apk store | Практический тест сертификации администратора Salesforce | Sea of thieves canpercent27t найти утечку | Harmonize africa moja mp3 download |
| Рабочий лист конгруэнтных и аналогичных треугольников отвечает геометрии if8764 M1 enforcer пистолет для продажи | 1998 chevy silverado 2500 diesel | Gibson быстросъемные пикапы для продажи | Proctoru контакт |
| Лазерные принтеры на прозрачной клейкой бумаге Reddit best lol overlay | В pcl5 гибридизация процентов22ppercent22 в катионных разновидностях | Mhw save editor xbox one | Cryzenx mario 64 |
| 1 марта 2014 г. · Подключение драйвера шагового двигателя ULN2003 к Arduino Uno.Плата драйвера шагового двигателя ULN2003 позволяет легко управлять шаговым двигателем 28BYJ-48 с микроконтроллера, такого как Arduino Uno. На одной стороне платы есть 5-проводная розетка, в которую подключается кабель от шагового двигателя, и 4 светодиода, указывающих, на какую катушку в настоящее время подается питание. | |||
| Mag torch mt 5500 Список уровней, означающий | Обновление ручной подачи Openvas | Бобышки с вентилятором Undertale | Cmmg ar 15 mk4 multi |
| на передней панели шагового двигателя | # вы хотите использовать.При использовании предустановленного движения введите скорость, количество шагов и ускорение. Подключите драйвер шагового двигателя к Arduino. На блок-схеме показана схема подключения для использования драйвера Easy Stepper. Щелкните “Выполнить”. ВП будет работать, пока вы не выберете Stop. Шаговые двигатели с Arduino – управление биполярными и униполярными шаговыми двигателями. РУКОВОДСТВО: Как использовать L293D Motor Driver Shield с Arduino. | ||
Городской макет плаката vkVape пузырьковая стеклянная протектор
| Ремонт отверстия под винт из стекловолокна 2019 can am Outlander Winch install | Chan_sip | Сделай это снова аккорды укулеле Cisco 7841 сброс настроек безопасности | ||||||
| 22 мая 2020 г. · Я пытаюсь управлять 3 биполярными шаговыми двигателями (2.1 В постоянного тока, 1 А / фаза, 2,1 Ом, но 2,5 Ом измерено дешевым мультиметром) с использованием имеющихся у меня плат драйверов – Stepper 2 Click (A4988 IC) и источника питания 12 В, 6,67 А, 80 Вт. | ||||||||
| Рабочий лист для устранения неравенств по абсолютным значениям Программное обеспечение kuta Ключ восстановления битлокера Sccm | Таймер Sonos alexa не работает | Заметка в реальном времени 10 3 | Профили резервного копирования icue | Схема изображения S Шаговый двигатель для БЕСПЛАТНОЙ схемы подключения в CROWDFUNDING-PLEDGE.DEMO.AGRIYA.COM | ||||
| Ведущий пастор jobs florida C99 webshell tutorial | Grupo estrella prestamos | Content Practice a Cell and Life 2015 wellcraft 290 Coastal | i Charge | |||||
| Data sgp master harian Шлифование коленчатого вала | Tucker Carlson children | Ios 14 theme for vivo скачать 6 | 2 9022 9022 9022 | 5.Схема затяжки болтов с 3 головками Карта концепции ухода за больными при преэклампсии | Таблетки для очистки дренажной линии переменного тока | Powershell скопировать файл и переименовать перезаписать Все сигнальные лампы на приборной панели toyota | Francesca pisani roma | |
| На схеме слева показаны 5 проводов, подключенных к двигателю. Подключите мотор к плате драйвера. Arduino должен быть подключен к плате драйвера ULN2003, как показано ниже: 5V + подключить к + 5V 5V- подключить к 0V (земля) IN1: к цифровому входу Arduino, контакт 8 IN2: к цифровому входу Arduino, контакт 9 IN3: к цифровому входному контакту Arduino 10 IN4: к контакту 11 цифрового входа Arduino… LV8714TASLDGEVB – это модуль драйвера полупроводникового двигателя ON с LV8714TA. Этот модуль может легко управлять двойными шаговыми двигателями. Вождение двигателя стало проще благодаря совместимости с Arduino Micro1). LV8714TASLDGEVB поставляется с базовой платой для облегченного подключения по принципу plug-and-play с Arduino Micro. | ||||||||
Корпоративный офис Aldo shoesBear creek beagles
| Как кадрировать на Mac Урок 6, набор задач 5.5 ответов | |||
| Скачать тему Shoptimized Септик, полный воды, когда идет дождь | Убийцы братьев Бондуран | Запись в Hackthebox | Разблокировать обновление прошивки tech gen 2 |
Поиск ответов Сэлинджер Рэдворкс keyPvms camera
| Как летать на ломом вертолете в ржавчине Sykkuno fake voice | |||
| latitude minecraft dellus Archmodels vol 152 скачать бесплатно | сиамские котята tacoma 2 | игры сумо minecraft | |
Отличные новости !!! Вы попали в нужное место для 3-проводного шагового двигателя.К настоящему времени вы уже знаете, что что бы вы ни искали, вы обязательно найдете это на AliExpress. У нас буквально есть тысячи отличных продуктов во всех товарных категориях. Ищете ли вы товары высокого класса или дешевые и недорогие оптовые закупки, мы гарантируем, что он есть на AliExpress.
Вы найдете официальные магазины торговых марок наряду с небольшими независимыми продавцами со скидками, каждый из которых предлагает быструю доставку и надежные, а также удобные и безопасные способы оплаты, независимо от того, сколько вы решите потратить.
AliExpress никогда не уступит по выбору, качеству и цене. Каждый день вы найдете новые онлайн-предложения, скидки в магазинах и возможность сэкономить еще больше, собирая купоны. Но вам, возможно, придется действовать быстро, поскольку этот трехпроводной шаговый двигатель станет одним из самых востребованных бестселлеров в кратчайшие сроки. Подумайте, как вам будут завидовать друзья, когда вы скажете им, что приобрели 3-проводный шаговый двигатель на AliExpress.Благодаря самым низким ценам в Интернете, дешевым тарифам на доставку и возможности получения на месте вы можете еще больше сэкономить.
Если вы все еще не уверены в трехпроводном шаговом двигателе и думаете о выборе аналогичного товара, AliExpress – отличное место для сравнения цен и продавцов. Мы поможем вам решить, стоит ли доплачивать за высококлассную версию или вы получаете столь же выгодную сделку, приобретая более дешевую вещь.И, если вы просто хотите побаловать себя и потратиться на самую дорогую версию, AliExpress всегда позаботится о том, чтобы вы могли получить лучшую цену за свои деньги, даже сообщая вам, когда вам будет лучше дождаться начала рекламной акции. и ожидаемая экономия.AliExpress гордится тем, что у вас всегда есть осознанный выбор при покупке в одном из сотен магазинов и продавцов на нашей платформе. Реальные покупатели оценивают качество обслуживания, цену и качество каждого магазина и продавца.Кроме того, вы можете узнать рейтинги магазина или отдельных продавцов, а также сравнить цены, доставку и скидки на один и тот же продукт, прочитав комментарии и отзывы, оставленные пользователями. Каждая покупка имеет звездный рейтинг и часто имеет комментарии, оставленные предыдущими клиентами, описывающими их опыт транзакций, поэтому вы можете покупать с уверенностью каждый раз. Короче говоря, вам не нужно верить нам на слово – просто слушайте миллионы наших довольных клиентов.
А если вы новичок на AliExpress, мы откроем вам секрет.Непосредственно перед тем, как вы нажмете «купить сейчас» в процессе транзакции, найдите время, чтобы проверить купоны – и вы сэкономите еще больше. Вы можете найти купоны магазина, купоны AliExpress или собирать купоны каждый день, играя в игры в приложении AliExpress. Вместе с бесплатной доставкой, которую предлагают большинство продавцов на нашем сайте, вы сможете приобрести 3-проводный шаговый двигатель по самой выгодной цене.
Мы всегда в курсе последних технологий, новейших тенденций и самых обсуждаемых лейблов.На AliExpress отличное качество, цена и сервис всегда в стандартной комплектации. Начните самый лучший шоппинг прямо здесь.
| Learn Products Suppliers Events News | В чем разница между 4-проводным и 6-проводным шаговым двигателем?В чем разница между 4-проводным и 6-проводным шаговым двигателем?При каких температурах могут работать шаговые двигатели?Большинство шаговых двигателей имеют изоляцию класса B.Это позволяет внутренней проводке шагового двигателя выдерживать температуру до 130 градусов Цельсия. При температуре окружающей среды 40 Цельсия шаговый двигатель допускает превышение температуры 90 Цельсия. Шаговые двигатели могут работать непрерывно при этих температурах.Для каких приложений можно использовать биполярный шаговый двигатель?Биполярный шаговый двигатель лучше всего использовать в ситуации, когда требуется высокий крутящий момент на низких скоростях.В чем разница между униполярным и биполярным шаговым двигателем?Основное различие между униполярным и биполярным шаговыми двигателями заключается в центральных соединениях отвода.Униполярный двигатель намотан шестью выводами, каждый из которых имеет центральный отвод. Они будут использоваться в приложениях, требующих высокого крутящего момента при высокой скорости. В то время как биполярный шаговый двигатель имеет четыре выводных провода, но не имеет соединений с центральным ответвлением. Биполярные шаговые двигатели используются, когда вам требуется высокий крутящий момент на низких скоростях.Для каких приложений можно использовать униполярный шаговый двигатель?Униполярный шаговый двигатель лучше всего использовать в том случае, если вам потребуется двигатель с высокой скоростью и высоким крутящим моментом.Что такое шаговый двигатель?Шаговый двигатель – это бесщеточный электродвигатель постоянного тока, который работает, разделяя полный оборот на ряд равных шагов. Двигатель может быть остановлен на любом из этапов без датчика обратной связи, если двигатель точно рассчитан для применения.Когда следует использовать микрошаг? Микрошагиспользуется в приложениях, требующих, чтобы двигатель работал со скоростью менее 700 PPS. При низкой частоте следования импульсов шаговые двигатели становятся менее плавными и часто вибрируют.Что такое униполярный шаговый двигатель?Униполярный шаговый двигатель – это один из двух основных типов двухфазных шаговых двигателей.Униполярный двигатель имеет одну обмотку с центральным отводом на фазу. Обычно центральный отвод делается общим, что дает три вывода на фазу и шесть выводов для типичного двухфазного двигателя. Обычно эти две общие фазы имеют внутреннее соединение, поэтому у двигателя пять выводов. Микроконтроллер или шаговый контроллер можно использовать для управления управляющими транзисторами в правильном порядке, что упрощает работу, делая униполярный шаговый двигатель самым дешевым способом получения точных угловых перемещений.Что такое биполярный шаговый двигатель?Биполярный шаговый двигатель – это тип двухфазного шагового двигателя, который имеет одну обмотку на фазу.Ток в обмотке этого типа двигателя необходимо реверсировать, чтобы перевернуть магнитный полюс, что значительно усложняет управление приводом на биполярных шаговых двигателях.Что такое шаговый двигатель?Шаговые двигатели – это двигатели постоянного тока, которые вращаются отдельными шагами. На каждом шаге двигатель удерживает свое положение без потребности в энергии, тем самым устраняя необходимость в датчиках позиционирования с обратной связью, пока двигатель имеет правильный размер и не пропущены никакие шаги. Устранение требований обратной связи и цифровая природа шагового двигателя упрощает интеграцию в цифровые системы.В чем разница между шаговыми и серводвигателями?Шаговые двигатели – это двигатели с постоянными магнитами, которые «делают шаг» на одно приращение каждый раз, когда компьютер подает управляющей электронике один импульс. Этим двигателям не требуется обратная связь по положению (если они работают в своих пределах). При остановке они автоматически удерживают свою позицию. Серводвигатели – это двигатели постоянного тока с обратной связью энкодера. Компьютер считывает положение двигателя и контролирует мощность, подаваемую на двигатель. Серводвигатели движутся быстрее от точки к точке и лучше ускоряют тяжелую технику.У них больше мощности на высоких скоростях, чем у шагового двигателя, и они могут вращаться намного быстрее, обычно 3000-6000 об / мин. Шаговый двигатель обладает большой мощностью на низких оборотах, однако он не должен работать со скоростью более 800 об / мин, поскольку крутящий момент быстро падает. Сервосистема знает, где находится станок во время резки, и знает, находится ли двигатель под большой нагрузкой или заклинило ось, и останавливает станок. Шаговая система не имеет обратной связи и не знает, заклинило ли она или потеряла позицию. В этом аспекте сервопривод более надежен.Шаговые двигатели так же точны, как и сервоприводы, и, кроме того, они проще и не требуют обслуживания в суровых и / или пыльных условиях.Что такое резонанс шагового двигателя?Резонанс относится к нестабильному состоянию при работе шагового двигателя. Резонанс часто возникает при 2-4 об / сек, и во многих ситуациях его можно уменьшить, поместив нагрузку на двигатель, переключившись с полного шага на половинный или микрошаговый, и / или увеличив ускорение в зоне резонанса.Что такое контроллер шагового двигателя?Контроллер шагового двигателя, обычно называемый контроллером движения, представляет собой систему, которая управляет вращением двигателей с целью перемещения механического компонента в определенное положение.Контроллеры движения не следует путать с драйверами двигателей, которые являются силовым компонентом системы позиционирования. Лидируют те системы на базе ПК, которые через параллельный порт подают сигналы на двигатели.При каких температурах обычно работают шаговые двигатели?Большинство шаговых двигателей имеют изоляцию класса B. Благодаря этому шаговый двигатель может выдерживать температуру до 130 градусов Цельсия. Следовательно, при температуре окружающей среды 40 градусов Цельсия шаговый двигатель имеет допуск на повышение температуры до 90 градусов Цельсия, что позволяет шаговым двигателям работать при высоких температурах.Можно ли получить больший крутящий момент, запустив шаговый двигатель с удвоенным номинальным током?Можно увеличить крутящий момент, увеличивая ток, но это ослабит способность двигателя работать плавно, а также приведет к повышению температуры двигателя. Пожалуйста, не запускайте шаговый двигатель выше внутренней температуры, соответствующей его классу.Что делают стояночные тормоза на шаговом двигателе?Удерживающие тормоза не замедляют вал двигателя, а удерживают его на месте.Если на тормоз подается 24 В, тормоз «отпускается», и вал двигателя может свободно вращаться. Если на тормоз не подается 24 В, он блокирует положение и удерживает вал двигателя на месте.Какие типоразмеры бывают у шаговых двигателей с высоким крутящим моментом?Размеры нашей рамы NEMA варьируются от 08 до 42 для наших шаговых двигателей с высоким крутящим моментом.От чего защищен герметичный шаговый двигатель со степенью защиты IP65?IP65 – это степень защиты. Цифра 6 говорит нам, что он полностью защищен от пыли. Цифра 5 означает, что он устойчив к струям воды под любым углом.Какие условия окружающей среды идеально подходят для шаговых двигателей со степенью защиты IP65? Шаговые двигателисо степенью защиты IP65 для суровых условий окружающей среды. Эти шаговые двигатели со степенью защиты IP65 отвечают требованиям защиты от брызг для большинства приложений во влажной или влажной среде.Герметизированы ли валы шаговых двигателей со степенью защиты IP65?Да, герметичные валы обеспечивают дополнительную защиту шаговых двигателей, что позволяет продлить срок их службы.Можете ли вы предоставить нестандартный шаговый двигатель IP65?Доступны специальные модификации вала, а также сумматоры кабеля, разъема и энкодера.Могут ли шаговые двигатели со степенью защиты IP65 иметь более высокий класс защиты IP?Да, они могут иметь более высокий рейтинг IP. Клиентам рекомендуется позвонить и обсудить требования приложения.Каковы преимущества использования шаговых двигателей?Скорость можно легко определить и контролировать, помня, что скорость равна шагам на оборот, деленным на частоту импульсов.2. Шаговый двигатель может совершать точные пошаговые движения. 3. Шаговый двигатель не требует обратной связи от энкодера (разомкнутый контур). 4. Некумулятивная ошибка позиционирования. 5. Отличные характеристики на низкой скорости / высоком крутящем моменте без редуктора. 6. Удерживающий момент шагового двигателя можно использовать для удержания нагрузки в неподвижном положении без перегрева. 7. Возможность работы в широком диапазоне скоростей. Как быстро я могу запустить шаговый двигатель?Большинство шаговых двигателей рассчитаны на работу на низкой скорости (3000 об / мин или меньше). Когда вы переходите на более высокие скорости, обычно используются серводвигатели.Насколько быстро работают наши шаговые двигатели?Большинство шаговых двигателей рассчитаны на работу на низкой скорости (3000 об / мин или меньше).Когда вы переходите на более высокие скорости, обычно используются серводвигатели.Какие шесть типов шаговых двигателей мы продаем?Шесть различных типов шаговых двигателей, которые мы продаем и продаем: это шаговые двигатели с высоким крутящим моментом (квадратные), стандартные (круглые) шаговые двигатели, шаговые двигатели с постоянным магнитом (PM), шаговые двигатели с уплотнением IP65, шаговые двигатели со встроенными драйверами и Шаговые двигатели со встроенными драйверами и контроллерами.Как можно подключить 4-проводные, 6-проводные и 8-проводные шаговые двигатели?Прежде всего, существуют два драйвера: униполярный и биполярный, униполярные приводы выводят сигнал на 6 выводов шагового двигателя, а биполярный вывод – на 4 вывода шагового двигателя.Таким образом, четырехполюсный двигатель можно подключить только к биполярному приводу. 6- и 8-выводный электродвигатели могут быть подключены к униполярному или биполярному приводу. На схеме подключения показаны возможные подключения.Сколько электрических фаз у шагового двигателя?Количество электрических фаз в шаговом двигателе определяется как количество используемых независимых обмоток.Какие шаговые двигатели совместимы с драйвером шагового двигателя DPD?Драйвер шагового двигателя совместим с шаговыми двигателями с высоким крутящим моментом, например, с нашими популярными 23Y, 34Y, 42Y.Или двигатели со стандартным крутящим моментом (с круглым корпусом): 23W, 34W, 23D, 34D и 42D.Сколько существует типов шаговых двигателей?Существует три различных типа шаговых двигателей: с постоянным магнитом, с переменным сопротивлением и гибридным.Почему глохнет мой шаговый двигатель?В некоторых случаях остановка шагового двигателя вызывает большой скачок напряжения, который часто повреждает фазовые транзисторы на драйвере. Некоторые драйверы предназначены для защиты от подобных ситуаций. В противном случае можно добавить устройства подавления переходных процессов.Проконсультируйтесь с заводом-изготовителем для получения дополнительной информации. |
Управление шаговыми двигателями с помощью Python с помощью Raspberry Pi | Кейт Уивер
В этом уроке я покажу вам, как настроить шаговый двигатель с Raspberry Pi. Я использую 40-контактный Raspberry Pi 3 (такой же для 28-контактного) и комплект шагового двигателя Kumantech.
Когда я начал работать с шаговыми двигателями, я следил за этим хорошо объясненным видео ниже. Нет письменной части или, по крайней мере, на данный момент ссылка в описании больше не работает.Я просто предоставляю свой образец кода и другие изображения моей установки.
Подключение
Первым шагом будет подключение к вашему Pi. Я рекомендую подключить Pi к монитору, просто чтобы убедиться, что все правильно настроено. Вам нужно будет быть подключенным к Интернету. Вам также нужно будет выполнить приведенную ниже команду, чтобы получить IP-адрес для SSH в:
имя хоста -I
С этим IP-адресом на вашем персональном компьютере (я использую OSx) запустите ssh pi @___ YOUR_PI_IP_ADD___ в приложение терминала.Это позволит мне программировать на моем Pi через мой персональный компьютер.
