
Принцип работы электродвигателя постоянного тока, устройство электромотора.
Электродвигатель постоянного тока был изобретен раньше других типов машин, преобразующих электрическую энергию в механическую. Несмотря на то, что позднее самое широкое распространение получили двигатели переменного тока, существуют сферы применения, в которых нет альтернативы электродвигателям постоянного тока.
Подробно о классификации и принципах работы электрических моторов, рекомендуем прочитать в нашей отдельной статье.
Содержание:
Электродвигатель постоянного и переменного тока
История изобретения
Электродвигатель Якоби.
Для того чтобы понять принцип работы электрических двигателей постоянного тока (ДПТ) мы обратимся к истории его создания. Итак, первые опытные доказательства того, что электрическую энергию можно превращать в механическую, продемонстрировал Майкл Фарадей. В 1821 году он провел опыт с проводником, опущенным в сосуд, наполненный ртутью, на дне которого располагался постоянный магнит.
Первый электрический двигатель постоянного тока, в основу которого был положен принцип вращения подвижной части (ротора) был создан русским физиком-механиком Борисом Семеновичем Якоби в 1834 году. Это устройство работало следующим образом:
- После подачи питания вокруг якоря-ротора создавалось электромагнитное поле, чьи полюса располагались напротив друг друга по правилу буравчика и отклонялись от одноименных полюсов индуктора.
- Перед тем, как электромагнитное поле якоря устанавливалось на максимальном приближении к разноименным полюсам индуктора, специальный коммутатор отключал питание, и якорь продолжал вращаться по инерции.
- После того, как якорь выходил из-под полюсов индуктора, коммутатор включал питание с обратной полярностью и появившееся «перевернутое» электромагнитное поле отталкивалось от полюсов индуктора, делая полный оборот якоря.

1-4 — металлические кольца, 5 — скользящий контакт, 6 — батарея
Описанный принцип использовался в двигателе, который Якоби установил на лодке с 12 пассажирами в 1839 году. Судно двигалось рывками со скоростью в 3 км/ч против течения (по другим данным — 4.5 км/ч), но успешно пересекло реку и высадило пассажиров на берег. В качестве источника питания использовалась батарея с 320 гальваническими элементами, а движение осуществлялось с помощью лопастных колес.
Дальнейшее изучение вопроса привело исследователей к разрешению массы вопросов, касаемо того, какие источники питания лучше использовать, как улучшить его рабочие характеристики и оптимизировать габариты.
В 1886 году Фрэнком Джулиан Спрэгом впервые был сконструирован электродвигатель постоянного тока, близкий по конструкции тем, которые применяются в наши дни. В нем был реализован принцип самовозбуждения и принцип обратимости электрической машины. К этому моменту все двигатели данного типа перешли на питание от более подходящего источника – генератора постоянного тока.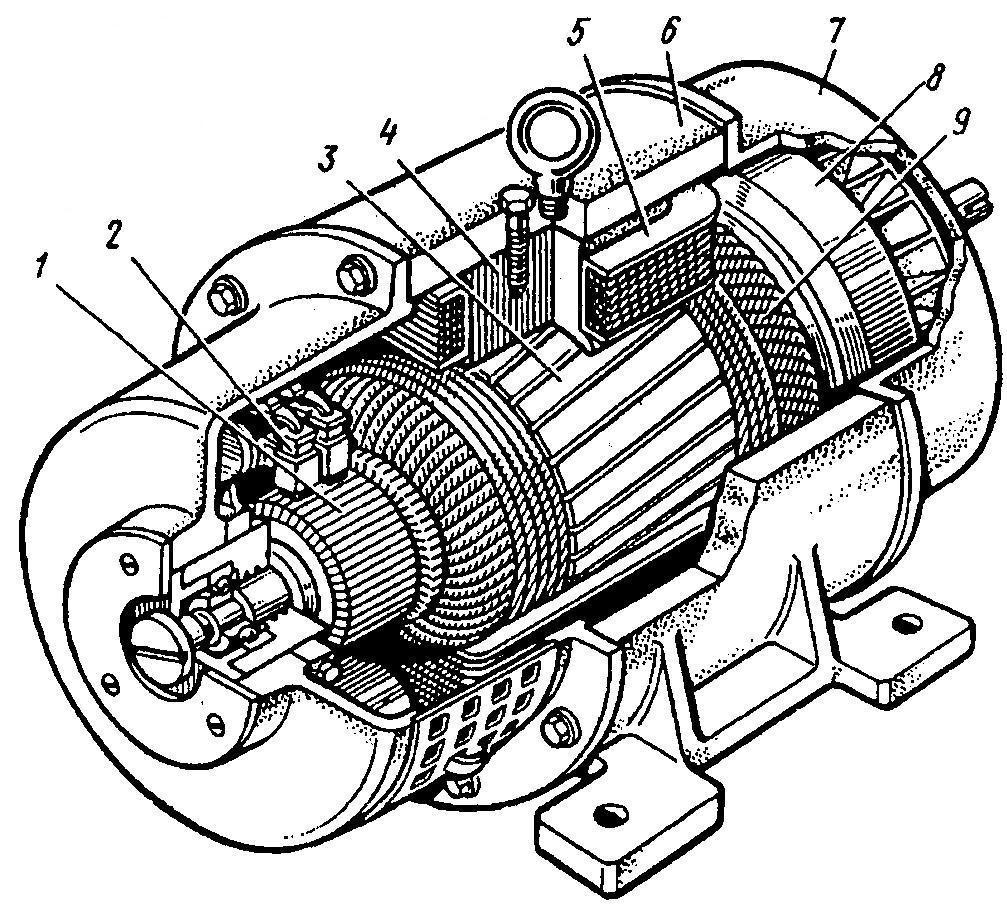
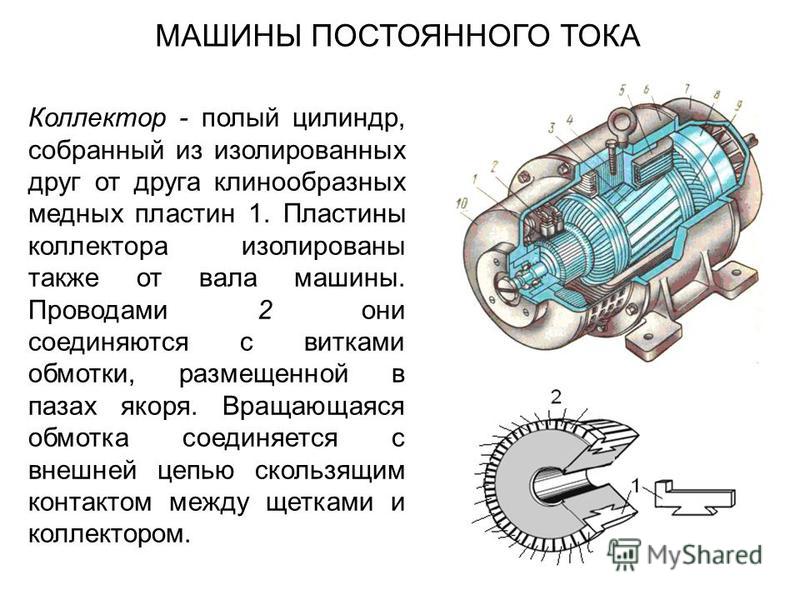
Щёточно-коллекторный узел обеспечивает электрическое соединение цепи ротора с цепями, расположенными в неподвижной части машины
Устройство и принцип работы
В современных ДПТ используется все тот же принцип взаимодействия заряженного проводника с магнитным полем. С усовершенствованием технологий устройство лишь дополняется некоторыми элементами, улучшающими производительность. К примеру, в наши дни постоянные магниты используются лишь в двигателях низкой мощности, поскольку в крупных аппаратах они занимали бы слишком много места.
Основной принцип
Первоначальные прототипы двигателей данного типа были заметно проще современных аппаратов. Их примитивное устройство включало в себя лишь статор из двух магнитов и якорь с обмотками, на которые подавался ток. Изучив принцип взаимодействия магнитных полей, конструкторы определили следующий алгоритм работы двигателя:
- Подача питания создает на обмотках якоря электромагнитное поле.
- Полюса электромагнитного поля отталкиваются от одноименных полюсов поля постоянного магнита.
- Якорь вместе с валом, на котором он закреплен, вращается в соответствии с отталкивающимся полем обмотки.
Данный алгоритм отлично работал в теории, однако на практике перед создателями первых двигателей вставали характерные проблемы, препятствовавшие функционированию машины:
- Мертвое положение, из которого двигатель невозможно запустить – когда полюса точно сориентированы друг перед другом.
- Невозможность пуска из-за сильного сопротивления или слабого отталкивания полюсов.
- Ротор останавливается после совершения одного оборота. Это связано с тем, что после прохождения половины окружности притягивание магнита не разгоняло, а тормозило вращение ротора.
Решение первой проблемы было найдено довольно быстро – для этого было предложено использовать более двух магнитов. Позднее в устройство двигателя стали включать несколько обмоток и коллекторно-щеточный узел, который подавал питание только на одну пару обмоток в определенный момент времени.
Коллекторно-щеточная система подачи тока решает и проблему торможения ротора – переключение полярности происходит до того момента, когда вращение ротора начинает замедляться. Это значит, что во время одного оборота двигателя происходит как минимум два переключения полярности.
Проблема слабых пусковых токов рассматривается ниже в отдельном разделе.
Конструкция
Итак, постоянный магнит закрепляется на корпусе двигателя, образуя вместе с ним статор, внутри которого располагается ротор. После подачи питания на обмотке якоря возникает электромагнитное поле, вступающее во взаимодействие с магнитным полем статора, это приводит к вращению ротора, жестко посаженного на вал. Для передачи электрического тока от источника к якорю двигатель оснащается коллекторно-щеточным узлом, состоящим из:
- Коллектора. Он представляет собой токосъемное кольцо из нескольких секций, разделенных диэлектрическим материалом, подключается к обмоткам якоря и крепится непосредственно на валу двигателя.

- Графитовых щеток. Они замыкают цепь между коллектором и источником питания с помощью щеток, которые прижимаются к контактным площадкам коллектора прижимными пружинами.
Обмотки якоря одними концами соединяются между собой, а другими – с секциями коллектора, образуя таким образом цепь, по которой ток идет по следующему маршруту: входная щетка –> обмотка ротора -> выходная щетка.
Приведенная принципиальная схема (рис. 3) демонстрирует принцип работы примитивного электродвигателя постоянного тока с коллектором из двух секций:
- В этом примере мы будет считать стартовым положением ротора то, которое нарисовано на схеме. Итак, после подачи питания на нижнюю щетку, помеченную знаком «+», ток протекает по обмотке и создает вокруг нее электромагнитное поле.
- По правилу буравчика в левой нижней части формируется северный полюс якоря, а на правой верхней – южный. Располагаясь вблизи одноименных полюсов статора, они начинают отталкиваться, приводя тем самым ротор в движение, которое продолжается до тех пор, пока противоположные полюса не окажутся на минимальном друг от друга расстоянии, то есть придут в окончательное положение (рис.
 1).
1). - Конструкция коллектора на данном этапе приведет к переключению полярности на обмотках якоря. В результате этого полюса магнитных полей снова окажутся на близком расстоянии и начнут отталкиваться.
- Ротор совершает полный оборот, и коллектор снова меняет полярность, продолжая его движение.
Детали электродвигателя постоянного тока
Здесь, как уже было отмечено, продемонстрирован принцип работы примитивного прототипа. В настоящих двигателях используется более двух магнитов, а коллектор состоит из большего числа контактных площадок, благодаря чему обеспечивается плавное вращение.
В высокомощных двигателях использование постоянных магнитов не представляется возможным из-за их большого размера. Альтернативой для них служит система из нескольких токопроводящих стержней, на каждой из которых имеется своя обмотка, подключаемая к питающим шинам. Одноименные полюса включаются в сеть последовательно. На корпусе может присутствовать от 1 до 4 пар полюсов, а их количеству должно соответствовать число токосъемных щеток на коллекторе.
Электродвигатели, рассчитанные на большую мощность, обладают рядом функциональных преимуществ перед более «легкими» аналогами. К примеру, здешнее устройство токосъемных щеток поворачивает их на определенный угол относительно вала для компенсации торможения вала, названного «реакцией якоря».
Пусковые токи
Постепенное оснащение ротора двигателя дополнительными элементами, обеспечивающими его бесперебойную работу и исключающими секторальное торможение, возникает проблема его запуска. Но все это увеличивает вес ротора – с учетом сопротивления вала столкнуть его с места становится сложнее. Первым решением этой проблемы, приходящим в голову, может быть увеличение силы тока, подаваемой на старте, но это может привести к неприятным последствиям:
- защитный автомат линии не выдержит тока и отключится;
- провода обмотки сгорят от перегрузки;
- секторы переключения на коллекторе приварятся от перегрева.
Поэтому такое решение можно назвать скорее рискованной полумерой.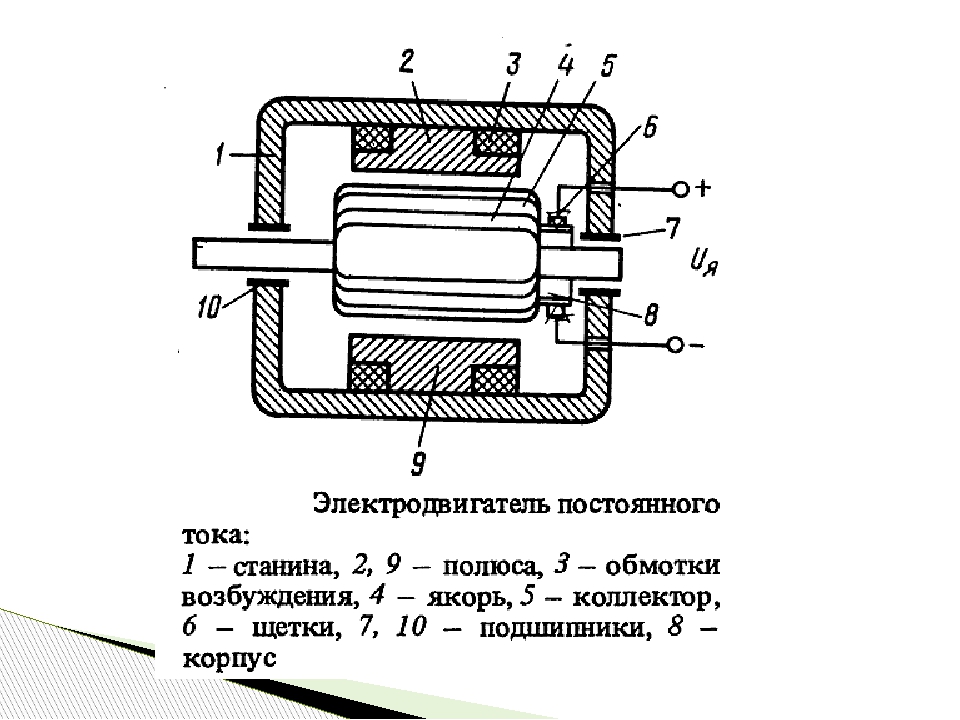
Вообще, данная проблема является главным недостатком электродвигателей постоянного тока, но включает в себя основное их преимущество, благодаря которому они незаменимы в некоторых областях. Преимущество это заключается в прямой передаче момента вращения сразу же после пуска – вал (если тронется с места) будет крутиться с любой нагрузкой. Двигатели переменного тока на такое не способны.
Решить эту проблему полностью до сих пор не удалось. На сегодняшний день для пуска таких двигателей используется автомат-стартер, чей принцип работы схож с автомобильной коробкой передач:
- Сначала ток постепенно поднимается до пускового значения.
- После «сдвига» с места значение тока резко падает и снова плавно поднимается «подгоняя вращение вала».
- После подъема до предельного значения сила тока снова снижается и «подгоняется».
Данный цикл повторяется 3-5 раз (рис. 4) и решает необходимость старта двигателя без возникновения критических нагрузок в сети. Фактически, «плавный» запуск по-прежнему отсутствует, однако оборудование работает безопасно, а главное достоинство электродвигателя постоянного тока – крутящий момент – сохраняется.
Фактически, «плавный» запуск по-прежнему отсутствует, однако оборудование работает безопасно, а главное достоинство электродвигателя постоянного тока – крутящий момент – сохраняется.
Схемы подключения
Подключение ДПТ выполняется несколько сложнее, в сравнении с двигателями со спецификацией на переменный ток.
У двигателей высокой и средней мощности, как правило, есть специальные контакты обмотки возбуждения (ОВ) и якоря, вынесенные в клеммную коробку. Чаще всего на якорь подают выходное напряжение источника, а на ОВ – ток, отрегулированный, как правило, реостатом. Скорость вращения двигателя напрямую зависит от силы тока, поданного на обмотку возбуждения.
Есть три основные схемы включения якоря и обмотки возбуждения электродвигателей постоянного тока:
- Последовательное возбуждение используется в моторах, от которых требуется большая сила тока на старте (электрический транспорт, прокатное оборудование и т.
 п.). Данная схема предусматривает последовательное подключение ОВ и якоря к источнику. После подачи напряжения по обмоткам якоря и ОВ проходят токи одинаковой величины.Следует учитывать, что снижение нагрузки на вал даже на четверть при последовательном возбуждении приведет к резкому повышению оборотов, что может привести к поломке двигателя, поэтому эта схема и используется в условиях постоянной нагрузки.
п.). Данная схема предусматривает последовательное подключение ОВ и якоря к источнику. После подачи напряжения по обмоткам якоря и ОВ проходят токи одинаковой величины.Следует учитывать, что снижение нагрузки на вал даже на четверть при последовательном возбуждении приведет к резкому повышению оборотов, что может привести к поломке двигателя, поэтому эта схема и используется в условиях постоянной нагрузки. - Параллельное возбуждение применяется в моторах, обеспечивающих работу станкового, вентиляторного и прочего оборудования, которое в момент пуска не оказывает высокую нагрузку на вал. В этой схеме для возбуждения ОВ используется независимая обмотка, регулируемая, чаще всего, реостатом.
- Независимое возбуждение очень схоже с параллельным, но в данном случае для подачи питания ОВ используется независимый источник, что исключает появление электрической связи между якорем и обмоткой возбуждения.
В современных электрических двигателях постоянного тока могут применяться смешанные схемы, основанные на базе трех описанных.
Регулировка скорости вращения
Способ регулирования оборотов ДПТ зависит от схемы его подключения:
- В моторах с параллельным возбуждением снижение оборотов относительно номинала можно производить изменяя напряжение якоря, а повышение – ослабляя поток возбуждения. Для увеличения оборотов (не более чем в 4 раза относительно номинальной величины) в цепь ОВ добавляется реостат.
- При последовательном возбуждении регулировка легко осуществляется переменным сопротивлением в цепи якоря. Правда этот метод подходит только для снижения оборотов и лишь в соотношениях 1:3 или 1:2 (кроме того, это приводит к большим потерям в реостате). Повышение осуществляется с помощью регулировочного реостата в цепи ОВ.
Данные схемы редко применяются в современном высокотехнологичном оборудовании, поскольку обладают узким диапазоном регулировки и другими недостатками. В наши дни для этих целей все чаще создают электронные схемы управления.
Реверсирование
Для того чтобы реверсировать (обратить) вращение двигателя постоянного тока необходимо:
- при последовательном возбуждении – просто изменить полярность входных контактов;
- при смешанном и параллельном возбуждении – необходимо менять направление тока в обмотке якоря; разрыв ОВ может привести к критическому повышению нагнетаемой электродвижущей силы и пробою изоляции проводов.
Сфера применения
Как вы уже поняли, использование электродвигателей постоянного тока целесообразно в условиях, когда постоянное беспрерывное подключение к сети неосуществимо. Хорошим примером здесь может служить автомобильный стартер, толкающий двигатель внутреннего сгорания «с места», или детские игрушки с моторчиком. В данных случаях для запуска двигателя используются аккумуляторные батареи. В промышленных целях ДПТ применяются на прокатных станах.
Основная же сфера применения ДПТ – электрический транспорт. Пароходы, электровозы, трамваи, троллейбусы и другие аналогичные имеют очень большое пусковое сопротивление, преодоление которого возможно только с помощью двигателей постоянного тока с их мягкими характеристиками и широкими пределами регулировки вращения. С учетом стремительного развития и популяризации экологических транспортных технологий, сфера применения ДПТ лишь увеличивается.
Самый простой щёточно-коллекторный узел
Достоинства и недостатки
Резюмируя все вышесказанное, можно описать характерные для электродвигателей постоянного тока достоинства и недостатки относительно их аналогов, рассчитанных на работу от переменного тока.
Основные достоинства:
- ДПТ незаменимы в ситуациях, когда необходим сильный пусковой момент;
- скорость вращения якоря легко регулируется;
- двигатель постоянного тока является универсальной электрической машиной, то есть может применяться в качестве генератора.
Главные недостатки:
- ДПТ имеют высокую производственную стоимость;
- использование щеточно-коллекторного узла приводит к необходимости частого техобслуживания и ремонта;
- для работы нужен источник постоянного тока или выпрямители.
Электродвигатели постоянного тока, безусловно, проигрывают своим «переменным» сородичам по стоимости и надежности, однако используются и будут использоваться, поскольку плюсы от их использования в определенных сферах категорические перечеркивают все минусы.
Как работает двигатель постоянного тока? (анимация и видео): shkola30 — LiveJournal
Дорогие мои читатели, начинаем разбирать темы августовского стола заказов (боже мой, как быстро летит время!). Сегодняшняя тема может быть мало кого заинтересует, зато если кого заинтересует, так это будет очень в пользу им. Слушаем trudnopisaka: Напишите пожалуйста понятно о устройстве электродвигателей постоянного тока. Можно на примере одного из типов. Ведь с одной стороны принцип работы очень простой, а с другой, если разобрать один из электродвигателей, то там много деталей, назначение которых не очевидно. А на сайтах в начале поисковой выдачи есть только название этих деталей, в лучшем случае. Планирую с детьми собрать простой электродвигатель, чтобы это помогло им в понимании техники и они не боялись ее осваивать.
Сегодняшняя тема может быть мало кого заинтересует, зато если кого заинтересует, так это будет очень в пользу им. Слушаем trudnopisaka: Напишите пожалуйста понятно о устройстве электродвигателей постоянного тока. Можно на примере одного из типов. Ведь с одной стороны принцип работы очень простой, а с другой, если разобрать один из электродвигателей, то там много деталей, назначение которых не очевидно. А на сайтах в начале поисковой выдачи есть только название этих деталей, в лучшем случае. Планирую с детьми собрать простой электродвигатель, чтобы это помогло им в понимании техники и они не боялись ее осваивать.
Первый этап развития электродвигателя (1821-1832) тесно связан с созданием физических приборов для демонстрации непрерывного преобразования электрической энергии в механическую.
В 1821 году М. Фарадей, исследуя взаимодействие проводников с током и магнитом, показал, что электрический ток вызывает вращение проводника вокруг магнита или вращение магнита вокруг проводника. Опыт Фарадея подтвердил принципиальную возможность построения электрического двигателя.
Опыт Фарадея подтвердил принципиальную возможность построения электрического двигателя.
Для второго этапа развития электродвигателей (1833-1860) характерны конструкции с вращательным движением якоря.
Томас Дэвенпорт — американский кузнец, изобретатель, в 1833 году сконструировал первый роторный электродвигатель постоянного тока, создал приводимую им в движение модель поезда. В 1837 году он получил патент на электромагнитную машину.
В 1834 году Б. С. Якоби создал первый в мире электрический двигатель постоянного тока, в котором реализовал принцип непосредственного вращения подвижной части двигателя. 13 сентября 1838 г. лодка с 12 пассажирами поплыла по Неве против течения со скоростью около 3 км/ч. Лодка была снабжена колесами с лопастями. Колеса приводились во вращение электрическим двигателем, который получал ток от батареи из 320 гальванических элементов. Так впервые электрический двигатель появился на судне.
Испытания различных конструкций электродвигателей привели Б. С. Якоби и других исследователей к следующим выводам:
С. Якоби и других исследователей к следующим выводам:
- расширение применения электродвигателей находится в прямой зависимости от удешевления электрической энергии, т. е. от создания генератора, более экономичного, чем гальванические элементы;
- электродвигатели должны иметь по возможности малые габариты, большую мощность ибольший коэффициент полезного действия;
- этап в развитии электродвигателей связан с разработкой конструкций с кольцевым неявнополюсным якорем и практически постоянным вращающим моментом.
Третий этап развития электродвигателей характеризуется открытием и промышленным использованием принципа самовозбуждения, в связи с чем был окончательно осознан и сформулирован принцип обратимости электрической машины. Питание электродвигателей стало производиться от более дешёвого источника электрической энергии — электромагнитного генератора постоянного тока.
В 1886 году электродвигатель постоянного тока приобрёл основные черты современной конструкции. В дальнейшем он всё более и более совершенствовался.
В дальнейшем он всё более и более совершенствовался.
В настоящее время трудно представить себе жизнь человечества без электродвигателя. Он используется в поездах, троллейбусах, трамваях. На заводах и фабриках стоят мощные электрические станки. Электромясорубки, кухонные комбайны, кофемолки, пылесосы — всё это используется в быту и оснащено электродвигателями.
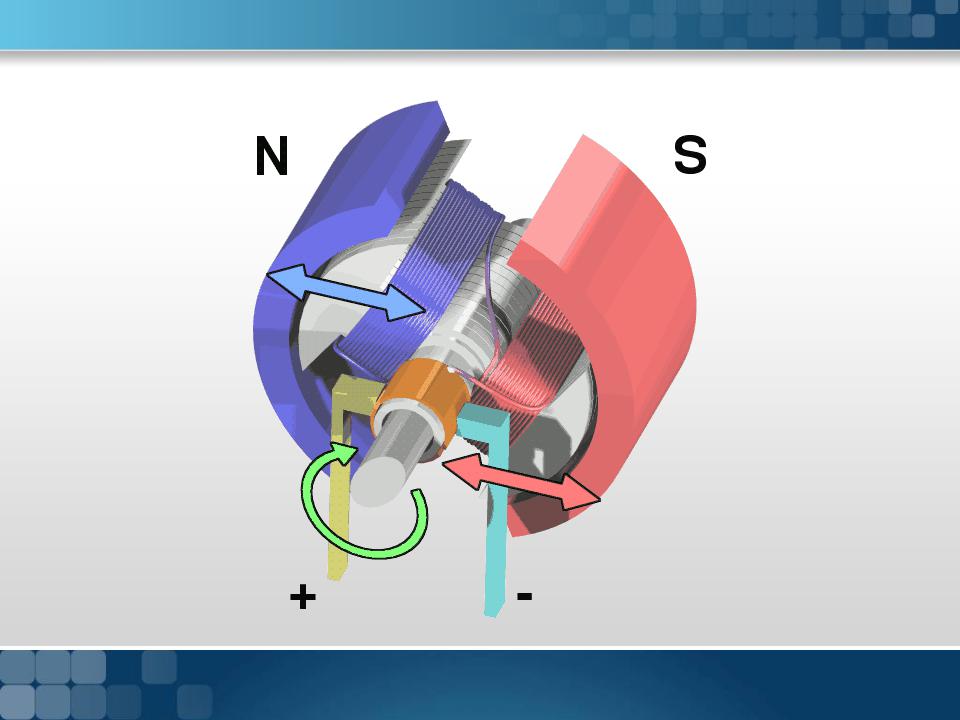
Подавляющее большинство электрических машин работает по принципу магнитного отталкивания и притяжения. Если между северным и южным полюсами магнита поместить проволоку и пропустить по ней ток, то её вытолкнет наружу. Как это возможно? Дело в том, что проходя по проводнику, ток формирует вокруг себя круговое магнитное поле по всей длине провода. Направление этого поля определяют по правилу буравчика (винта).
При взаимодействии кругового поля проводника и однородного поля магнита, между полюсами магнитное поле с одной стороны ослабевает, а с другой усиливается. То есть среда становится упругой и результирующая сила выталкивает провод из поля магнита под углом 90 градусов в направлении, определяемом по правилу левой руки (правило правой руки используется для генераторов, а правило левой руки подходит только для двигателей). Эта сила называется «амперовой» и её величина определяется по закону Ампера F=BхIхL, где В – значение магнитной индукции поля; I – ток, циркулирующий в проводнике; L – длина провода.
Эта сила называется «амперовой» и её величина определяется по закону Ампера F=BхIхL, где В – значение магнитной индукции поля; I – ток, циркулирующий в проводнике; L – длина провода.
Это явление использовали как основной принцип работы первых электродвигателей, этот же принцип используют и поныне. В двигателях постоянного тока малой мощности для создания постоянного магнитного поля применяются постоянные магниты. В электромоторах средней и большой мощности однородное магнитное поле создают с помощью обмотки возбуждения или индуктора.
Рассмотрим принцип создания механического движения с помощью электричества более подробно. На динамической иллюстрации показан простейший электромотор. В однородном магнитном поле вертикально располагаем проволочную рамку и пропускаем по ней ток. Что происходит? Рамка проворачивается и по инерции двигается какое-то время до достижения горизонтального положения. Это нейтральное положение – мёртвая точка — место, где воздействие поля на проводник с током равно нулю.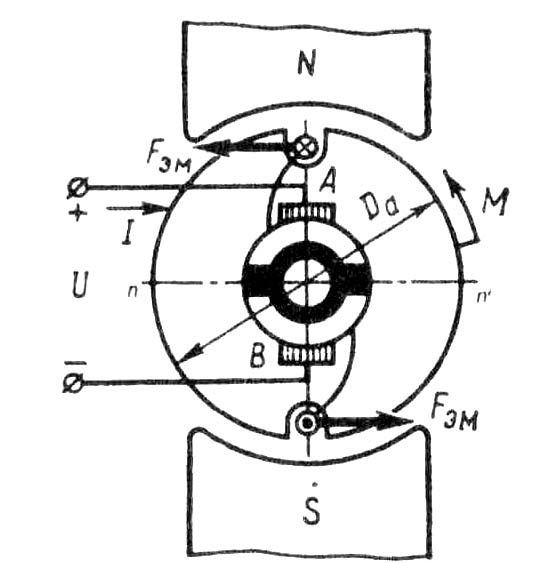 Чтобы движение продолжилось, нужно добавить ещё хотя бы одну рамку и обеспечить переключение направление тока в рамке в нужный момент. На обучающем видео внизу страницы хорошо виден этот процесс.
Чтобы движение продолжилось, нужно добавить ещё хотя бы одну рамку и обеспечить переключение направление тока в рамке в нужный момент. На обучающем видео внизу страницы хорошо виден этот процесс.
Современный двигатель постоянного тока вместо одной рамки имеет якорь с множеством проводников, уложенных в пазы, а вместо постоянного подковообразного магнита имеет статор с обмоткой возбуждения с двумя и более полясами. На рисунке показан двухполюсный электромотор в разрезе. Принцип его работы следующий. Если по проводам верхней части якоря пропустить ток движущийся «от нас» (отмечено крестиком), а в нижней части — «на нас» (отмечено точкой), то согласно правилу левой руки верхние проводники будут выталкиваться из магнитного поля статора влево, а проводники нижней половины якоря по тому же принципу будут выталкиваться вправо. Поскольку медный провод уложен в пазах якоря, то, вся сила воздействия будет передаваться и на него, и он будет проворачиваться. Дальше видно, что когда проводник с направлением тока «от нас» провернётся вниз и станет против южного полюса создаваемого статором, то он будет выдавливаться в левую сторону, и произойдёт торможение. Чтобы этого не случилось нужно поменять направление тока в проводе на противоположное, как только будет пересечена нейтральная линия. Это делается с помощью коллектора – специального переключателя, коммутирующего обмотку якоря с общей схемой электродвигателя.
Чтобы этого не случилось нужно поменять направление тока в проводе на противоположное, как только будет пересечена нейтральная линия. Это делается с помощью коллектора – специального переключателя, коммутирующего обмотку якоря с общей схемой электродвигателя.
Таким образом, обмотка якоря передаёт вращающий момент на вал электромотора, а тот в свою очередь приводит в движение рабочие механизмы любого оборудования, такого как, например, станок для сетки рабицы. Хотя в этом случае используется асинхронный двигатель переменного тока, основной принцип его работы идентичен принципу действия двигателя постоянного тока – это выталкивание проводника с током из магнитного поля. Только у асинхронного электромотора вращающееся магнитное поле, а у электродвигателя постоянного тока – поле статичное.
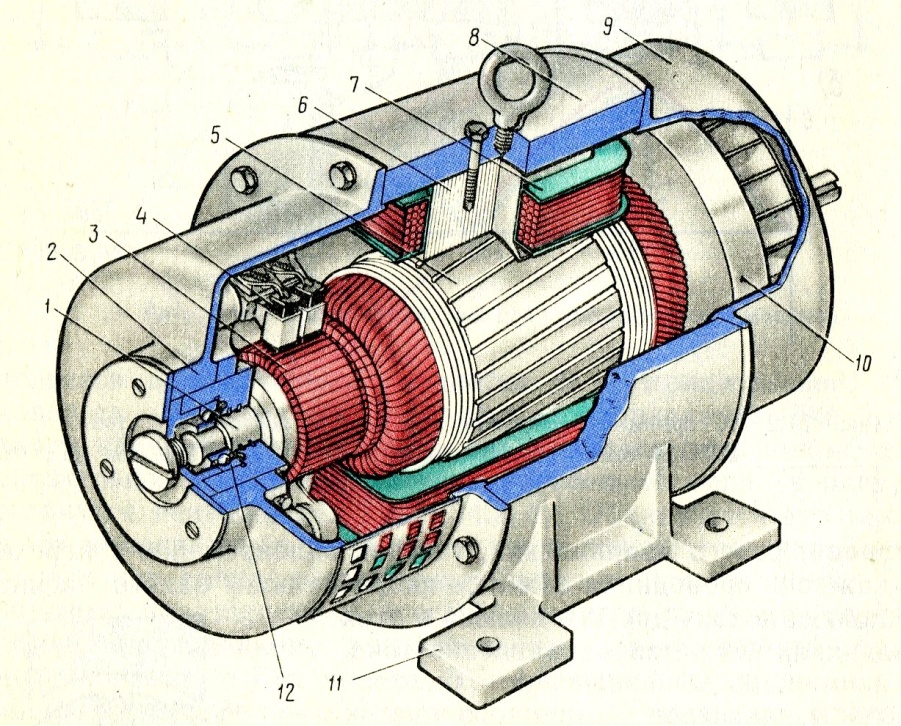
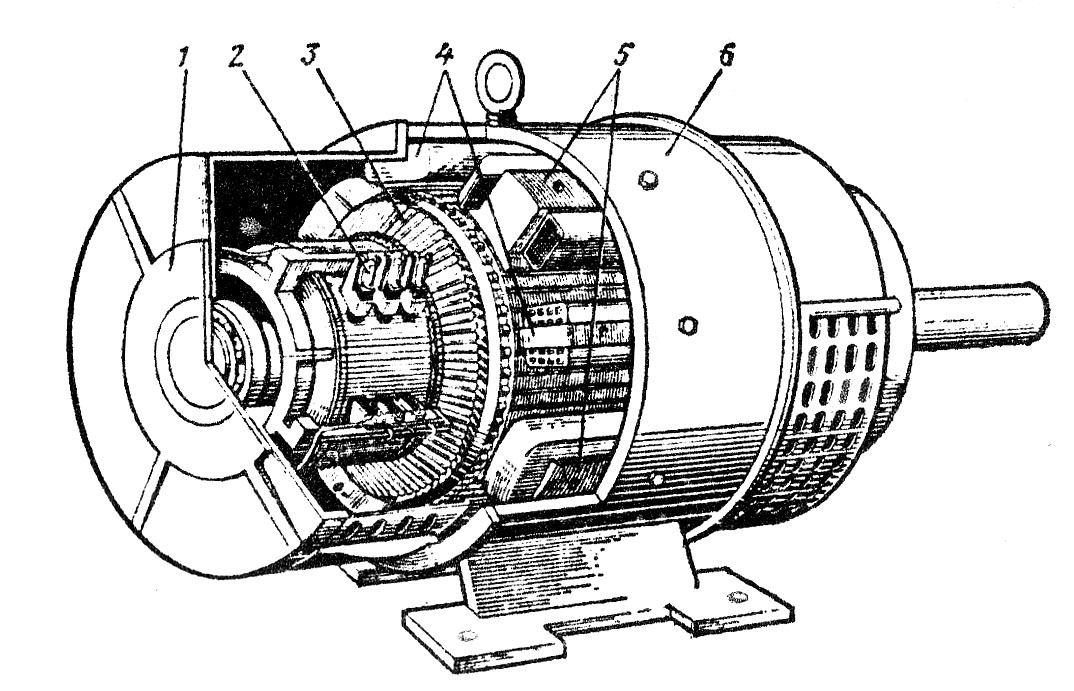
Конструктивно все электрические двигатели постоянного тока состоят из индуктора и якоря, разделенных воздушным зазором.
Индуктор (статор) электродвигателя постоянного тока служит для создания неподвижного магнитного поля машины и состоит из станины, главных и добавочных полюсов. Станина служит для крепления основных и добавочных полюсов и является элементом магнитной цепи машины. На главных полюсах расположены обмотки возбуждения, предназначенные для создания магнитного поля машины, на добавочных полюсах – специальная обмотка, служащая для улучшения условий коммутации.
Станина служит для крепления основных и добавочных полюсов и является элементом магнитной цепи машины. На главных полюсах расположены обмотки возбуждения, предназначенные для создания магнитного поля машины, на добавочных полюсах – специальная обмотка, служащая для улучшения условий коммутации.
Якорь электродвигателя постоянного тока состоит из магнитной системы, собранной из отдельных листов, рабочей обмотки, уложенной в пазы, и коллектора служащего для подвода к рабочей обмотке постоянноготока.
Коллектор представляет собой цилиндр, насаженный на вал двигателя и избранный из изолированных друг от друга медных пластин. На коллекторе имеются выступы-петушки, к которым припаяны концы секций обмотки якоря. Съем тока с коллектора осуществляется с помощью щеток, обеспечивающих скользящий контакт с коллектором. Щетки закреплены в щеткодержателях, которые удерживают их в определенном положении и обеспечивают необходимое нажатие щетки на поверхность коллектора. Щетки и щеткодержатели закреплены на траверсе, связанной с корпусомэлектродвигателя.
Щетки и щеткодержатели закреплены на траверсе, связанной с корпусомэлектродвигателя.
Коллекторный движок он очень хорош. Он чертовски легко и гибко регулируется. Можно повышать обороты, понижать, механическая характеристика жесткая, момент он держит на ура. Зависимость прямая. Ну сказка, а не мотор. Если бы не одна ложка дегтя во всей этой вкусняшке — коллектор.
Это сложный, дорогой и очень ненадежный узел. Он искрит, создает помехи, забивается проводящей пылью от щеток. А при большой нагрузке может полыхнуть, образовав круговой огонь и тогда все, капец движку. Закоротит все дугой наглухо.
Но что такое коллектор вообще? Нафига он нужен? Выше я говорил, что коллектор это механический инвертор. Его задача переключать напряжение якоря туда сюда, подставляя обмотку под поток.
Коллектор в электрических машинах выполняет роль выпрямителя переменного тока в постоянный (в генераторах) и роль автоматического переключателя направления тока во вращающихся проводниках якоря (в двигателях).
Когда магнитное поле пересекается только двумя проводниками, образующими рамку, коллектор будет представлять собой одно кольцо, разрезанное на две части, изолированные одна от другой. В общем случае каждое полукольцо носит название коллекторной пластины.
Начало и конец рамки присоединяются каждый к своей коллекторной пластине. Щетки располагаются таким образом, чтобы одна из них была всегда соединена с проводником, который будет двигаться у северного полюса, а другая — с проводником, который будет двигаться у южного полюса.
Рис. 2. Упрощенное изображения коллектора
Рис. 3. Выпрямление переменного тока с помощью коллектора
Сообщим рамке вращательное движение в направлении по часовой стрелке. В момент, когда вращающаяся рамка займет положение, изображенное на рис. 3, А, в ее проводниках будет индуктироваться наибольший по величине ток, так как проводники пересекают магнитные силовые линии, двигаясь перпендикулярно к ним.
Индуктированный ток из проводника В, соединенного с коллекторной пластиной 2, поступит на щетку 4 и, пройдя внешнюю цепь, через щетку 3 возвратится в проводник А. При этом правая щетка будет положительной, а левая отрицательной.
Дальнейший поворот рамки (положение В) приведет снова к индуктированию тока в обоих проводниках; однако направление тока в проводниках будет противоположно тому, которое они имели в положении А. Так как вместе с проводниками повернутся и коллекторные пластины, то щетка 4 снова будет отдавать электрический ток во внешнюю цепь, а по щетке 3 ток будет возвращаться в рамку.
Отсюда следует, что, несмотря на изменение направления тока в самих вращающихся проводниках, благодаря переключению, произведенному коллектором, направление тока во внешней цепи не изменилось.
В следующий момент (положение Г), когда рамка вторично займет положение на нейтральной линии, в проводниках и, следовательно, во внешней цепи тока опять не будет.
В последующие моменты времени рассмотренный цикл движений будет повторяться в том же порядке. Таким образом, направление индуктированного направление тока во внешней цепи благодаря коллектору все время будет оставаться одним и тем же, а вместе с этим сохранится и полярность щеток.
Щёточный узел необходим для подвода электроэнергии к катушкам на вращающемся роторе и переключения тока в обмотках ротора. Щётка — неподвижный контакт (обычно графитовый или медно-графитовый). Щётки с большой частотой размыкают и замыкают пластины-контакты коллектора ротора. Как следствие, при работе ДПТ происходят переходные процессы, в обмотках ротора. Эти процессы приводят к искрению на коллекторе, что значительно снижает надёжность ДПТ. Для уменьшения искрения применяются различные способы, основным из которых является установка добавочных полюсов. При больших токах, в роторе ДПТ возникают мощные переходные процессы, в результате чего, искрение может постоянно охватывать все пластины коллектора, независимо от положения щёток.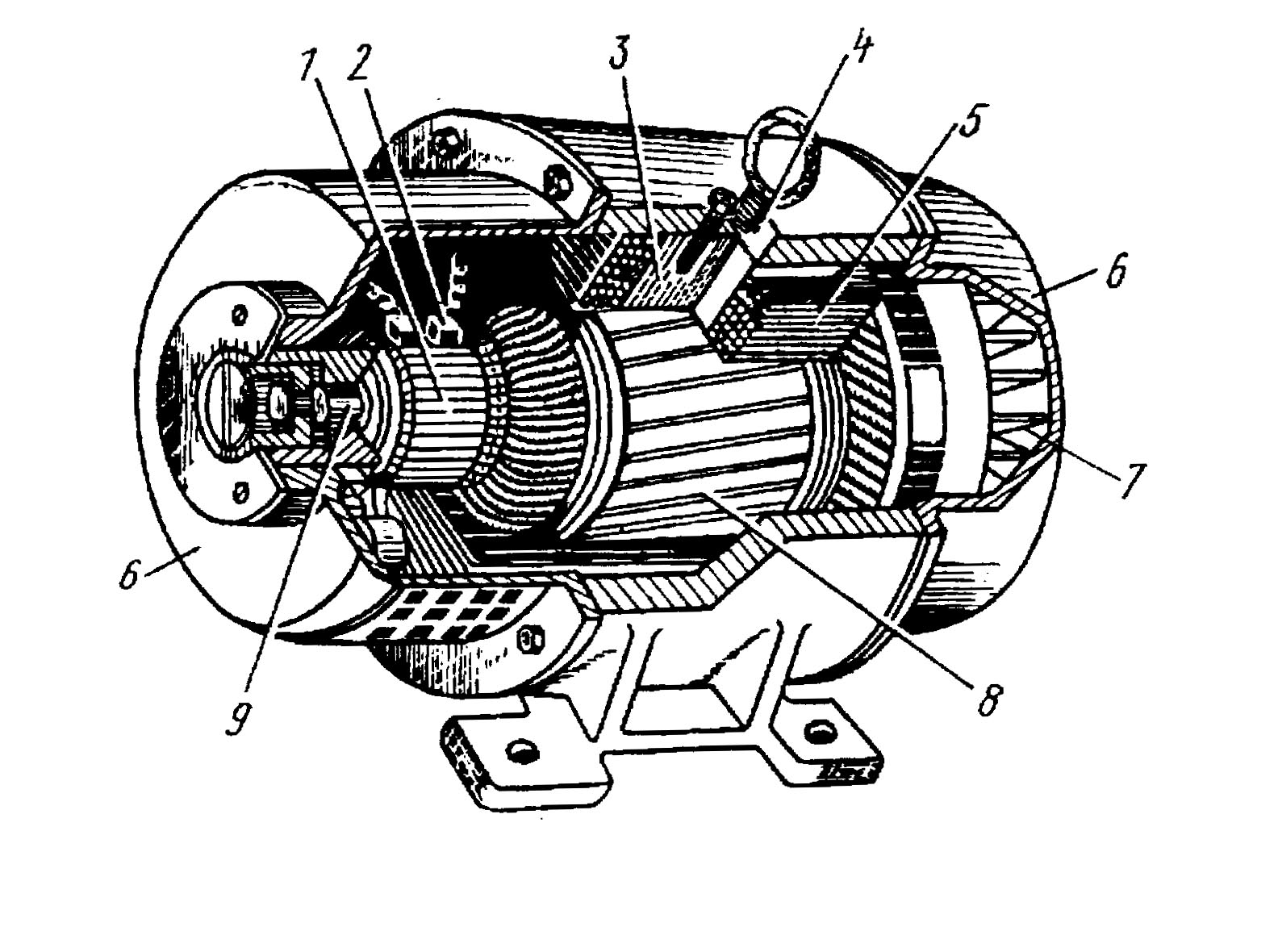 Данное явление называется кольцевым искрением коллектора или «круговой огонь». Кольцевое искрение опасно тем, что одновременно выгорают все пластины коллектора и срок его службы значительно сокращается. Визуально кольцевое искрение проявляется в виде светящегося кольца около коллектора. Эффект кольцевого искрения коллектора не допустим. При проектировании приводов устанавливаются соответствующие ограничения на максимальные моменты (а следовательно и токи в роторе), развиваемые двигателем.Конструкция двигателя может иметь один или несколько щеточно-коллекторных узлов.
Данное явление называется кольцевым искрением коллектора или «круговой огонь». Кольцевое искрение опасно тем, что одновременно выгорают все пластины коллектора и срок его службы значительно сокращается. Визуально кольцевое искрение проявляется в виде светящегося кольца около коллектора. Эффект кольцевого искрения коллектора не допустим. При проектировании приводов устанавливаются соответствующие ограничения на максимальные моменты (а следовательно и токи в роторе), развиваемые двигателем.Конструкция двигателя может иметь один или несколько щеточно-коллекторных узлов.
А на дворе то уже 21 век и дешевые и мощные полупроводники сейчас на каждом шагу. Так зачем нам нужен механический инвертор если мы можем сделать его электронным? Правильно, незачем! Так что берем и заменяем коллектор силовыми ключами, а еще добавляем датчики положения ротора, чтобы знать в какой момент переключать обмотки.
А для пущего удобства выворачиваем двигатель наизнанку — гораздо проще вращать магнит или простенькую обмотку возбуждения, чем якорь со всей этой тряхомудией на борту.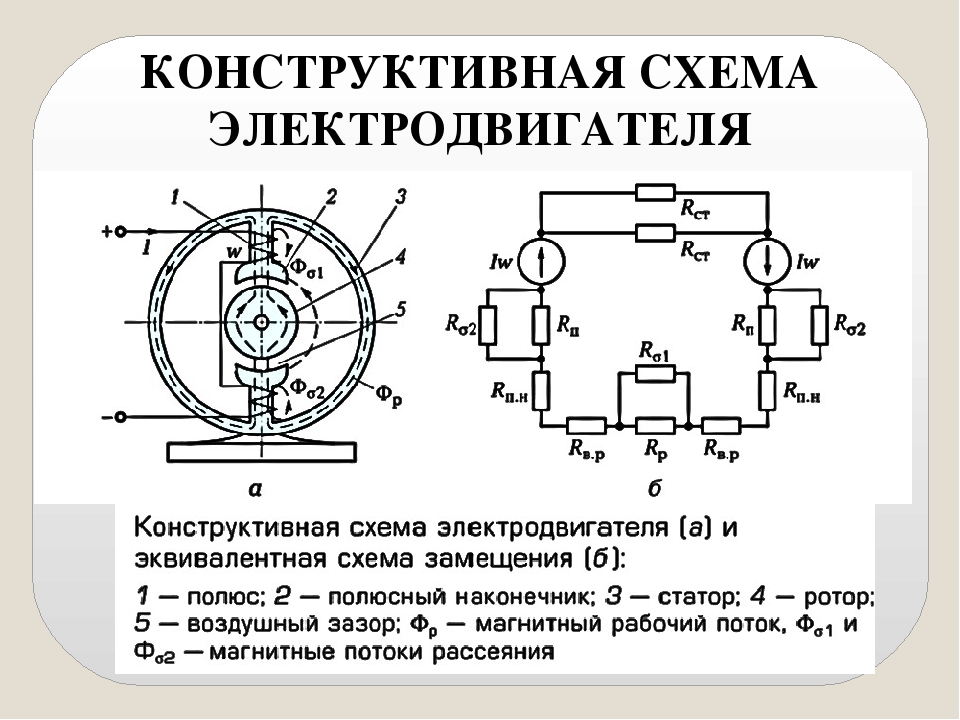 В качестве ротора тут выступает либо мощный постоянный магнит, либо обмотка питаемая с контактных колец. Что хоть и смахивает на коллектор, но не в пример надежней его.
В качестве ротора тут выступает либо мощный постоянный магнит, либо обмотка питаемая с контактных колец. Что хоть и смахивает на коллектор, но не в пример надежней его.
И получаем что? Правильно! Бесщеточный двигатель постоянного тока aka BLDC. Все те же няшные и удобные характеристики ДПТ, но без этого мерзкого коллектора. И не надо путать BLDC с синхронными двигателями. Это совсем разные машины и разным принципом действия и управления, хотя конструктивно они ОЧЕНЬ схожи и тот же синхронник вполне может работать как BLDC, добавить ему только датчиков да систему управления. Но это уже совсем другая история. ВОТ ТУТ можно прочитать про него подробнее.
Продолжая тему двигателя постоянного тока нужно отметить, что принцип действия электродвигателя основывается на инвертировании постоянного тока в якорной цепи, чтобы не было торможения, и вращение ротора поддерживалось в постоянном ритме. Если изменить направление тока в возбуждающей обмотке статора, то, согласно правилу левой руки, изменится направление вращения ротора. То же самое произойдёт, если мы поменяем местами щёточные контакты, подводящие питание от источника к якорной обмотке. А вот если поменять «+» «-» и там и там, то направление вращения вала не изменится. Поэтому, в принципе, для питания такого мотора можно использовать и переменный ток, т.к. ток в индукторе и якоре будет меняться одновременно. На практике такие устройства используются редко.
То же самое произойдёт, если мы поменяем местами щёточные контакты, подводящие питание от источника к якорной обмотке. А вот если поменять «+» «-» и там и там, то направление вращения вала не изменится. Поэтому, в принципе, для питания такого мотора можно использовать и переменный ток, т.к. ток в индукторе и якоре будет меняться одновременно. На практике такие устройства используются редко.
Думаю многие из вас кто баловался с движками могли заметить, что у них есть ярко выраженный пусковой ток, когда мотор на старте может рвануть стрелку амперметра, например, до ампера, а после разгона ток падает до каких-нибудь 200мА.
Почему это происходит? Это работает противоэдс. Когда двигатель стоит, то ток который через него может пройти зависит только лишь от двух параметров — напряжения питания и сопротивления якорной обмотки. Так что предельный ток который может развить движок и на который следует рассчитывать схему узнать несложно. Достаточно замерить сопротивление обмотки двигателя и поделить на это значение напряжение питания. Просто по закону Ома. Это и будет максимальный ток, пусковой.
Просто по закону Ома. Это и будет максимальный ток, пусковой.
Но по мере разгона начинается забавная вещь, обмотка якоря движется поперек магнитного поля статора и в ней наводится ЭДС, как в генераторе, но направлена она встречно той, что вращает двигатель. И в результате, ток через якорь резко снижается, тем больше, чем выше скорость.
А если движок дополнительно еще подкручивать по ходу, то противоэдс будет выше питания и движок начнет вкачивать энергию в систему, став генератором.
Что касается электрической схемы включения двигателя, то их несколько и они показаны на рисунке. При параллельном соединении обмоток, обмотка якоря делается из большого количества витков тонкой проволоки. При таком подключении коммутируемый коллектором ток будет значительно меньше из-за большого сопротивления и пластины не будут сильно искрить и выгорать. Если делать последовательное соединение обмоток индуктора и якоря, то обмотка индуктора делается из провода большего диаметра с меньшим количеством витков, т.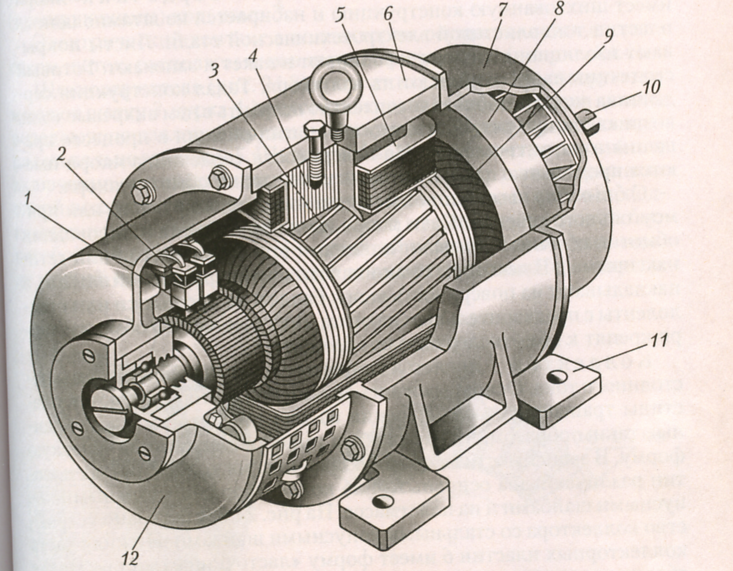 к. весь якорный ток устремляется через статорную обмотку. При таких манипуляциях с пропорциональным изменением значений тока и количества витков, намагничивающая сила остаётся постоянной, а качественные характеристики устройства становятся лучше.
к. весь якорный ток устремляется через статорную обмотку. При таких манипуляциях с пропорциональным изменением значений тока и количества витков, намагничивающая сила остаётся постоянной, а качественные характеристики устройства становятся лучше.
На сегодняшний день двигатели постоянного тока мало используются на производстве. Из недостатков этого типа электрических машин можно отметить быстрый износ щёточно-коллекторного узла. Преимущества – хорошие характеристики запуска, лёгкая регулировка частоты и направления вращения, простота устройства и управления.
В настоящее время двигатели постоянного тока независимого возбуждения, управляемые тиристорными преобразователями, используются в промышленных электроприводах.’Эти приводы обеспечивают регулирование скорости в широком диапазоне. Регулирование скорости вниз от номинальной осуществляется изменением напряжения на якоре, а вверх — ослаблением потока возбуждения. Ограничения, по мощности и скорости обусловлены свойствами используемых двигателей, а не полупроводниковых приборов. Тиристоры могут соединяться последовательно или параллельно, если они имеют недостаточно высокий. класс по напряжению или току. Ток якоря и момент ограничены перегрузочной способностью двигателя по нагреву.
Тиристоры могут соединяться последовательно или параллельно, если они имеют недостаточно высокий. класс по напряжению или току. Ток якоря и момент ограничены перегрузочной способностью двигателя по нагреву.
Принцип работы:
Сборка двигателя постоянного тока ПО ДЕТАЛЯМ:
Оригинал статьи находится на сайте ИнфоГлаз.рф Ссылка на статью, с которой сделана эта копия – http://infoglaz.ru/?p=32677
СО-сообщества “2Академия”, “Марсианский трактор”, “Мир Полдня”, “Школа Полдня”, “ЗОНА СИНГУЛЯРНОСТИ”.
Двигатель постоянного тока – это.
 .. Что такое Двигатель постоянного тока?
.. Что такое Двигатель постоянного тока?Рис. 1 Устройство простейшего коллекторного двигателя постоянного тока с двухполюсным статором и с двухполюсным ротором
Двигатель постоянного тока — электрическая машина, машина постоянного тока, преобразующая электрическую энергию постоянного тока в механическую энергию.
История
Краткое описание коллекторного двигателя постоянного тока
Простейший двигатель на рис. 1 является машиной постоянного тока, состоит из одного постоянного магнита на статоре, из одного электромагнита с явно выраженными полюсами на роторе (двухполюсного ротора с явно выраженными полюсами и с одной обмоткой из двух частей), щёточноколлекторного узла с двумя пластинами (ламелями) и двумя щётками. Имеет два положения ротора (две «мёртвые точки»), из которых невозможен самозапуск, и неравномерный крутящий момент, в первом приближении (магнитное поле полюсов статора B — равномерное (однородное) и др.) равный
, где – число витков обмотки ротора, – индукция магнитного поля полюсов статора, – ток в обмотке ротора [А], – длина рабочей части витка обмотки [м], – расстояние от оси ротора до рабочей части витка обмотки ротора (радиус) [м], – синус угла между направлением северный-южный полюс статора и аналогичным направлением в роторе [рад], – угловая скорость [рад/сек], – время [сек].
Из-за наличия угловой ширины щёток и углового зазора между пластинами (ламелями) коллектора в двигателе этой конструкции имеются динамически постоянно короткозамкнутые щётками части обмотки ротора. Число короткозамкнутых частей обмотки ротора равно числу щёток. Эти короткозамкнутые части обмотки ротора не участвует в создании общего крутящего момента.
Суммарная короткозамкнутая часть ротора в двигателях с одним коллектором равна:
, где n – число щёток, alfa – угловая ширина одной щётки [радиан].
Без учёта короткозамкнутых щётками частей крутящего момента средний крутящий момент s рамок (витков) с током за один оборот равен площади под интегральной кривой крутящего момента, делённой на длину периода (1оборот = ):
Рис. 2 Коллекторный двигатель постоянного тока с двухполюсным статором и с трёхполюсным ротором
Двигатель на рис. 2 состоит из одного электромагнита на статоре (двухполюсного статора) с явно выраженными полюсами и с одной обмоткой, трёхполюсного ротора с явно выраженными полюсами и с тремя обмотками (обмотки ротора могут быть включены звездой или треугольником), щёточноколлекторного узла с тремя пластинами (ламелями) и с двумя щётками. Самозапуск возможен из любого положения ротора. Имеет меньшую неравномерность крутящего момента, чем двигатель с двухполюсным ротором (рис. 1).
Самозапуск возможен из любого положения ротора. Имеет меньшую неравномерность крутящего момента, чем двигатель с двухполюсным ротором (рис. 1).
ДПТ являются обратимыми электрическими машинами, то есть в определённых условиях способны работать как генераторы.
Сокращение ДПТ (двигатель постоянного тока) является неудачным, так как название “двигатель переменного тока” имеет то же сокращение – ДПТ. Но так как двигатели переменного тока разделяются на ассинхронные (АД) и синхронные (СД), сокращение ДПТ относят к двигателям постоянного тока.
Статор
На статоре ДПТ располагаются в зависимости от конструкции:
- постоянные магниты
- электромагниты с обмотками возбуждения — катушки, наводящие магнитный поток возбуждения
В простейшем случае имеет два полюса, т.е. один магнит с одной парой полюсов.
Ротор
Состоит из электромагнитов с переключаемой полярностью и датчика положения ротора и переключателя (коллектора). В простейшем случае ротор состоит из одного электромагнита с двумя полюсами, т.е. имеет одну пару полюсов, при этом есть две “мёртвые точки” из которых невозможен самозапуск двигателя.
В простейшем случае ротор состоит из одного электромагнита с двумя полюсами, т.е. имеет одну пару полюсов, при этом есть две “мёртвые точки” из которых невозможен самозапуск двигателя.
Рис. 3 Ротор
Ротор с тремя полюсами (полторы пары) имеет наименьшее число полюсов ротора при которых самозапуск возможен из любого положения ротора. На самом деле один полюс всё время делится на две части, т.е. ротор имеет неявные две пары полюсов. Ротор любого ДПТ состоит из многих катушек, на часть которых подаётся питание в зависимости от угла поворота ротора относительно статора. Применение большого числа (несколько десятков) катушек необходимо для уменьшения неравномерности крутящего момента, для уменьшения коммутируемого (переключаемого) тока, для обеспечения оптимального взаимодействия между магнитными полями ротора и статора (то есть для создания максимального момента на роторе).
При вычислении момента инерции ротора его в первом приближении можно считать сплошным однородным цилиндром с моментом инерции равным где – масса цилиндра (ротора), а – радиус цилиндра (ротора).
Коллектор (коллекторный узел, щёточный узел, коллекторно-щёточный узел, щёточно-коллекторный узел)
Коллектор (щёточно-коллекторный узел) выполняет одновременно две функции – является датчиком углового положения ротора и переключателем тока со скользящими контактами.
Конструкции коллекторов имеют множество разновидностей.
Выводы всех катушек объединяются в коллекторный узел. Коллекторный узел обычно представляет собой кольцо из изолированных друг от друга пластин-контактов (ламелей), расположенных по оси (вдоль оси) ротора. Существуют и другие конструкции коллекторного узла.
Рис. 4 Графитовые щётки
Щёточный узел необходим для подвода электроэнергии к катушкам на вращающемся роторе и переключения тока в обмотках ротора. Щётка — неподвижный контакт (обычно графитовый или медно-графитовый).
Щётки часто размыкают и замыкают пластины-контакты коллектора ротора, как следствие при работе ДПТ происходят переходные процессы в обмотках ротора. Эти процессы приводят к искрению на коллекторе, что значительно снижает ресурс ДПТ. Искрение уменьшают выбором положения щёток относительно статора (снижая ток коммутации), а также подключением внешних реактивных элементов (конденсаторов).
Эти процессы приводят к искрению на коллекторе, что значительно снижает ресурс ДПТ. Искрение уменьшают выбором положения щёток относительно статора (снижая ток коммутации), а также подключением внешних реактивных элементов (конденсаторов).
При больших токах в роторе ДПТ возникают мощные переходные процессы, в результате чего искрение может постоянно охватывать все пластины коллектора, независимо от положения щёток. Данное явление называется кольцевым искрением коллектора или «круговой огонь». Кольцевое искрение опасно тем, что одновременно выгорают все пластины коллектора и срок его службы значительно сокращается. Визуально кольцевое искрение проявляется в виде светящегося кольца около коллектора. Эффект кольцевого искрения коллектора не допустим, при проектировании приводов устанавливаются соответствующие ограничения на максимальные моменты (а следовательно и токи в роторе), развиваемые двигателем.
Классификация
- По виду магнитной системы статора
- С постоянными магнитами
- С электромагнитами
- По способу включения обмоток возбуждения электромагнитов статора
Двигатели постоянного тока различаются по способу коммутации обмоток возбуждения. Вид подключения обмоток возбуждения существенно влияет на тяговые и электрические характеристики электродвигателя. Существуют схемы независимого, параллельного, последовательного и смешанного включения обмоток возбуждения.
Принцип работы
В принципе работы электродвигателя постоянного тока есть два подхода: 1. рамка (2 стержня) с током в магнитном поле статора, 2. взаимодействие магнитных полей статора и ротора.
Рамка с током в однородном магнитном поле полюсов статора
В однородном магнитном поле полюсов статора с индукцией на два стержня рамки длиной с током действуют силы Ампера постоянной величины, равные
и направленные в противоположные стороны.
Эти силы прикладываются к плечам , равным
, где – радиус рамки, и создают крутящий момент , равный
.
Для двух стержней рамки суммарный крутящий момент равен
. Практически из-за того, что угловая ширина щётки [радиан] немного меньше угловой ширины зазора между пластинами (ламелями) коллектора, чтобы источник питания не замыкался накоротко, четыре небольших части под кривой крутящего момента, равные , где , не участвуют в создании общего крутящего момента.
При числе витков в обмотке равном s крутящий момент будет равен .
Наибольший крутящий момент будет при угле поворота рамки равном , т.е. 90°, при этом угле поворота рамки с током вектора магнитных полей статора и ротора (рамки) будут перпендикулярны друг к другу, т.е. под углом 90°. При угле поворота ротора (рамки) 180° крутящий момент равен нулю из-за нулевого плеча, но силы не равны нулю и это положение ротора (рамки), при отсутствии переключения тока, весьма устойчиво и подобно одному шагу в шаговом двигателе.
Без учёта короткозамкнутых щётками частей крутящего момента средний крутящий момент за один оборот (период) равен площади под интегральной кривой крутящего момента делённой на длину периода :
При s витков в обмотке
Две рамки с током в однородном магнитном поле полюсов статора
Если на роторе машины установить вторую рамку, сдвинутую относительно первой на угол π / 2, то получится четырёхполюсный ротор. Момент второй рамки:
Суммарный момент обеих рамок:
Таким образом получается, что крутящий момент зависит от угла поворота ротора, но неравномерность меньше, чем при одной рамке. Кроме этого добавляется самозапуск из любого положения ротора. При этом для второй рамки потребуется второй коллектор (щёточно-коллекторный узел). Оба узла соединяются параллельно, при этом переключение тока в рамках происходит в интервалах с наименьшим током в рамках, при последовательном соединении переключение тока в одной из рамок (разрыв цепи) происходит во время максимального тока в другой рамке. Практически, из-за того, что угловая ширина щётки α [рад] немного меньше угловой ширины зазора β [рад] между пластинами коллектора (ламелями) восемь небольших частей под кривой крутящего момента, равных
, где Δ = β − α, не участвуют в создании общего крутящего момента.
Рамка с током в неоднородном магнитном поле полюсов статора
Если магнитное поле полюсов статора неоднородное и изменяется по отношению к стержням рамки по закону
, то крутящий момент для одного стержня будет равен
,
для двух стержней
,
для рамки из витков
.
В создании крутящего момента не участвуют четыре части под кривой крутящего момента равные
.
Без учёта короткозамкнутых щётками частей крутящего момента средний крутящий момент за один оборот (период) равен площади под интегральной кривой делённой на длину периода :
При s витках в обмотке
Две рамки с током в неоднородном магнитном поле полюсов статора
Для второй (косинусной) рамки ,
крутящий момент от второй (косинусной) рамки будет равен
,
суммарный крутящий момент от обеих рамок равен
, т.е. постоянен и от угла поворота ротора не зависит.
Практически, из-за наличия зазора, восемь небольших частей под кривой крутящего момента равные
каждая,
в создании крутящего момента не участвуют.
Для вычисления момента инерции ротора его можно считать в первом приближении сплошным однородным цилиндром с моментом инерции
, где – масса цилиндра (ротора), – радиус цилиндра (ротора).
Взаимодействие магнитных полей
Магнитные поля статора и ротора (рамки с током), взаимоотталкиваются, чем ротор (рамка) приводится во вращение на 180°. Для дальнейшего вращения необходимо переключение направления тока в рамке.
Разновидности
Коллекторные, с щёточноколлекторным переключателем тока
С одним коллектором (щёточноколлекторным узлом) и обмотками, где – число пар полюсов ротора, с соединением обмоток ротора в кольцо (по этой классификации двигатель на рис. 2 является полуторным, имеет полторы пары полюсов и 2*1,5=3 обмотки ротора). Имеют большую короткозамкнутую щётками часть обмотки ротора, равную
, где – число щёток, – угловая ширина одной щётки (рад), – число пи (3,14…).
С двумя коллекторами (щёточноколлекторными узлами, в бесколлекторных с инвертором на двух параллельных мостах) и двумя обмотками синусной и косинусной (синусно-косинусный, двухфазный) с неоднородным (синусообразным) магнитным полем полюсов статора. Имеют малую нерабочую часть под кривой крутящего момента, равную
, где – угловая ширина зазора между пластинами коллектора (ламелями), подобен двухфазному бесколлекторному.
С тремя коллекторами и тремя обмотками (в бесколлекторных с инвертором на трёх параллельных мостах, трёхфазный).
С четырьмя коллекторами (щёточноколлекторными узлами) и двумя обмотками синусной и косинусной (синусно-косинусные), специальные. Специальная конструкция коллектора с четырьмя коллекторами (один коллектор на одну щётку) позволяет почти до нуля уменьшить нерабочую часть крутящего момента (нерабочая часть крутящего момента в этом двигателе зависит от точности изготовления деталей) и сделать используемую часть крутящего момента независимой от угловой ширины щётки. При этом угловая ширина одной пластины коллектора равна , где – угловая ширина одной щётки.
С четырьмя коллекторами и четырьмя обмотками (в бесколлекторных – с инвертором на четырёх параллельных мостах, четырёхфазный).
С восемью коллекторами (щёточноколлекторными узлами). В этом двигателе уже нет рамок, а ток подаётся через коллекторы в отдельные стержни ротора.
И др.
Другие виды электродвигателей постоянного тока
Применение
- Электропривод тепловозов, теплоходов, карьерных самосвалов
- Стартёры автомобилей, тракторов и др. Для уменьшения номинального напряжения двигателя в автомобильных стартёрах применяют двигатель постоянного тока с четырьмя щётками, при этом эквивалентное комплексное сопротивление ротора уменьшается почти в четыре раза, при этом статор имеет четыре полюса (две пары полюсов). Пусковой ток в автомобильных стартёрах около 200 ампер. Режим работы — кратковременный.
Бесколлекторные, с электронным переключателем тока
Электронным аналогом щёточно-коллекторного узла является инвертор с датчиком положения ротора (ДПР) (Вентильный электродвигатель).
Ротор является постоянным магнитом, а обмотки статора переключаются электронными схемами — инверторами. Бесколлекторные электродвигатели могут быть однофазными (две «мёртвые точки»), двухфазными (синусно-косинусными), трёх- и более фазными.
Бесколлекторный двигатель постоянного тока с выпрямителем (мостом) может заменить универсальный коллекторный двигатель (УКД).
Управление ДПТ
Механическая характеристика ДПТ
Зависимость частоты от момента на валу ДПТ. Отображается в виде графика. Горизонтальная ось (абсцисс) — момент на валу ротора, вертикальная ось (ординат) — частота вращения ротора. Механическая характеристика ДПТ есть прямая, идущая с отрицательным наклоном.
Механическая характеристика ДПТ строится при определённом напряжении питания обмоток ротора. В случае построения характеристик для нескольких значений напряжения питания говорят о семействе механических характеристик ДПТ.
Регулировочная характеристика ДПТ
Зависимость частоты вращения ротора от напряжения питания обмоток ротора ДПТ. Отображается в виде графика. Горизонтальная ось (абцисс) — напряжение питания обмоток ротора, вертикальная ось (ординат) — частота вращения ротора. Регулировочная характеристика ДПТ есть прямая, идущая с положительным наклоном.
Регулировочная характеристика ДПТ строится при определённом моменте, развиваемом двигателем. В случае построения регулировочных характеристик для нескольких значений момента на валу ротора говорят о семействе регулировочных характеристик ДПТ.
Управление ДПТ
Основные формулы, используемые при управлении ДПТ:
Крутящий момент, развиваемый двигателем, пропорционален току в обмотке якоря (ротора):
, где – ток в обмотке якоря, — коэффициент крутящего момента двигателя (зависит от конструкции двигателя и тока в обмотке возбуждения).
Ток в обмотке ротора по закону Ома прямо пропорционален приложенному напряжению и обратно пропорционален сопротивлению обмотки ротора:
, где – напряжение, приложенное к обмотке ротора, — сопротивление обмотки ротора.
ПротивоЭДС в обмотках якоря пропорциональна угловой частоте вращения ротора:
, где — коэффициент ЭДС двигателя, – угловая скорость вращения ротора.
Следовательно, величиной крутящего момента можно управлять меняя напряжение на ДПТ. Такой способ применяют для относительно маломощных двигателей.
Для управления более сильными (мощными) двигателями используют: а) принцип ШИМ, когда изменяется не величина напряжения, а длительность его приложения к двигателю, б) регулирование крутящего момента изменением напряжения на обмотке возбуждения, требует меньшую мощность элементов схемы управления, чем регулирование изменением напряжения на всём двигателе, но при этом способе регулирования ток через обмотку якоря не управляется, из-за этого даже при малом крутящем моменте большой ток через обмотку якоря будет нагревать обмотку якоря, что может привести к перегреву и выходу из строя двигателя. Возможно применение для регулирования крутящего момента в небольших пределах от номинального крутящего момента.
Управление двигателем осуществляется по току в обмотке двигателя, который пропорционален напряжению, приложенному к этой обмотке. Реакцию двигателя на данное напряжение при определённом внешнем моменте можно увидеть на соответствующей регулировочной характеристике. Регулировочная характеристика показывает скорость, которую двигатель достигнет в установившемся режиме.
Достоинства и недостатки ДПТ
Достоинства:
- Простота устройства и управления
- Практически линейные механическая и регулировочная характеристики двигателя
- Легко регулировать частоту вращения.
- Хорошие пусковые свойства (большой пусковой момент).
Недостатки:
- Необходимость профилактического обслуживания коллекторно-щёточных узлов
- Ограниченный срок службы из-за износа коллектора
См. также
Ссылки
Wikimedia Foundation. 2010.
Асинхронный электродвигатель постоянного тока 220В и 380В.
Электродвигатель – машина, преобразовывающая энергию электромагнитного поля во вращательное движение (электрический двигатель). Это, пожалуй, наиболее гениальное изобретение, позволившее человечеству сделать цивилизационный скачок в индустриальное общество. Коэффициент его полезного действия составляет 95-98 процентов.Основа принципа действия
В основе принципа действия любого электрического двигателя лежит феномен электромагнитной индукции. Если скрутить любой проводник в кольцо и через него протащить магнит, то в нем возникнет электрический ток, направление течения которого будет противоположно движению магнита. Верно и обратное: прохождение электричества через проводник вызывает индуцирование ЭДС в металлическом стержне.
Этот эффект был открыт в 1832 году английским физиком Майклом Фарадеем, создавшим прибор, состоящий из постоянного магнита и бронзового диска, помещенного между его полюсами. При вращении диска с подключенных к нему проводов снималось небольшое напряжение и переменный ток большой силы. Поэтому диск Фарадея называют еще и униполярным генератором, который при всей архаичности конструкции до сих пор используется. Например, в установках ТОКАМАК для разогрева плазмы и рельсотронах – разновидности оружия.
Электрический двигатель постоянного тока
Если к диску Фарадея подключить гальваническую батарею, то он совершит один оборот – до того момента, как совпадут разноименные полюса – ее и магнита. Электродвигатель постоянного тока в своей работе использует эффект отталкивания одноименных полюсов магнита. Чтобы вращение стало непрерывным, на его роторе закреплено особое устройство (коллектор) – кольцо из металла, поделенное на сектора диэлектриком.
Питающее напряжение подводится к коллектору посредством скользящих контактов – щеток. Когда вал машины поворачивается, сектора коллектора меняются местами и полюса остаются разноименными. Поэтому вращение продолжается. Скорость вращения ротора машин постоянного тока зависит от количества обмоток на нем. Каждая из них представляет собой своеобразный диск Фарадея и подключена к своей паре пластин коллектора.
Если ее мощность электрической машины невелика, то статорные магниты делают из природного металла с соответствующими свойствами. В промышленных машинах постоянного тока используются электромагниты – катушки из проводников. Они питаются тем же напряжением, что и катушки ротора.
Двигатели переменного тока
Конструкция электродвигателя переменного потом электроэнергии выглядит как бы вывернутой наизнанку по отношению к машинам постоянного тока. Питающее напряжение в нем подводится к статорным обмоткам, а принцип действия основан не на отталкивании одноименных полюсов магнита, а на притягивании имеющих противоположный знак.
Магнитное поле статора машины переменного тока вращается. Этот феномен возникает в результате сложения векторов магнитной индукции нескольких переменных токов, фазы синусоид которых сдвинуты друг относительно друга на некоторый угол – 900, если питание двухфазное, и 600 при трехфазном напряжении. Величины углов объясняются просто: отдельная обмотка генератора переменного тока состоит из двух катушек, а на статоре они расположены диаметрально противоположно. Если поделить 3600 на четыре (две обмотки) или на шесть (три обмотки), то получим исходные значения.
Магнитное поле ротора индуцируется энергией в статорных обмотках и имеет два свойства:
- Оно противоположно статорному по знаку.
- Отстает от статорного, поскольку на его индукцию требуется некоторое время, а сам ротор имеет физический вес и по этой причине обладает моментом инерции.
- Линейная скорость ротора ниже из-за разницы в размерах.
- Существуют потери энергии в воздушном зазоре между деталями машины.
Угол рассогласования между ротором и статором достигает 180, из-за его наличия электродвигатели переменного электричества называют асинхронными.
Наиболее распространенной конструкцией является электрическая машина, обмотка ротора которой состоит из нескольких проводников, замкнутых двумя металлическими кольцами. По форме она похожа на так называемое беличье колесо. Таковы все общепромышленные электродвигатели. Они просты, но имеют неустранимый недостаток: большие пусковые токи, которые приводят к перегрузкам в сети и авариям.
Двигатели с фазным ротором запускаются плавно, без перегрузок, но они сложны и дороги. Применяются для обеспечения больших тяговых усилий. Например, в крановом оборудовании или на электротранспорте.
Видео – как работает Электродвигатель:
Как правильно эксплуатировать электродвигатель
Асинхронный электродвигатель на сегодня является наиболее широко используемым двигателем в промышленности и строительстве. Чтобы устройство было всегда в форме и не пришлось его отправлять на свалку в результате преждевременного износа, хорошие хозяева проявляют заботу о нём и эксплуатируют правильно. В этой статье мы обсудим, как правильно эксплуатировать электродвигатель во избежание возникновения неполадок при его работе.
Условия работы электрического двигателя
Электрический двигатель будет в полной мере соответствовать характеристикам, указанным в паспорте, если его, прежде всего, правильно установить и использовать. Условия обеспечения номинальных параметров двигателем следующие:
— колебания напряжения питающей сети электрического тока, к которой подключен агрегат, не должны превышать 5% от номинала;
— максимально допустимая температура воздуха, окружающего конструкцию, должна быть не более +350 С;
— во избежание перегрузки мотора необходимо следить за показаниями амперметра, не допуская увеличения силы тока более 5% от номинала;
— корпус устройства надежно следует заземлить и регулярно проверять сопротивления заземления;
— конструктивные элементы, изготовленные из коррозируемых материалов, необходимо покрыть краской. Коррозия всегда начинается на поверхности металла, а затем распространяется вглубь, ухудшая механические свойства материала;
— кабельные сети, по которым поступает питающее напряжение, следует надёжно изолировать и защитить от случайных механических повреждений. Подключение выполнить напрямую к контактным зажимам двигателя, находящимся в коробке.
Элементарные правила эксплуатации в отношении своего двигателя
Правильная эксплуатация электродвигателя обеспечивает его надёжную работу в течение всего установленного ресурса. До включения устройства в работу обязательно проверить:
– чистоту и отсутствие ненужных предметов на корпусе и рядом;
– состояние заземления;
– качество крепления статора.
Первый запуск электродвигателя лучше доверить специалисту, который будет обслуживать все движущиеся механизмы.
Рекомендации по эксплуатации асинхронных электродвигателей:
-
У работающего двигателя основные электрические и механические показатели должны быть следующими:
– температура нагрева статора не более 900 С;
– вибрация в пределах нормы, а именно в соответствии с количеством оборотов двигателя;
– вращение ротора бесшумное, без скачков;
– установленная заводом-изготовителем величина нагрузки;
– отсутствие искрения щёток у коллекторных двигателей.
-
Защита электрических цепей осуществляется плавкими вставками. Значение тока по номиналу пишется на вставке.
-
Аварийное отключение электродвигателя производится в следующих случаях:
– появился сильный запах горения, дым, искры, огонь;
– повышенный уровень вибрации, из-за которого возможно разрушение двигателя;
– выход из строя электропривода;
– резкое снижение оборотов и повышенный нагрев.
Владелец также обязан планировать профилактические ремонты, которые повышают надёжность оборудования.
Некоторые двигатели используются крайне редко. Как поступать в этом случае? Рекомендуется постоянно осматривать, проверять сопротивление изоляции и запускать устройства, что позволит при необходимости без промедления их использовать.
Вывод
Конструкция асинхронного электродвигателя простая и надёжная. И, если соблюдать правила эксплуатации, в том числе не превышать основные электрические и механические параметры, установленные изготовителем, то срок его службы можно будет увеличить.
Электродвигатели Остались вопросы?
Специалисты ЭНЕРГОПУСК ответят на Ваши вопросы:
8-800-700-11-54 (8-18, Пн-Вт)
Как работает двигатель постоянного тока принцип действия. От кольцевого якоря к барабанному. Общие сведения, устройство, сфера применения
В основу работы любых электродвигателей положен принцип электромагнитной индукции. Электродвигатель состоит из неподвижной части — статора (для асинхронных и синхронных движков переменного тока) либо индуктора (для движков постоянного тока) и подвижной части — ротора (для асинхронных и синхронных движков переменного тока) либо якоря (для движков постоянного тока). В роли индуктора на маломощных двигателях постоянного тока нередко используются постоянные магниты.
Все двигатели, грубо говоря можно поделить на два вида:
двигатели постоянного тока
двигатели переменного тока (асинхронные и синхронные)
Двигатели постоянного тока
По неким мнениям данный двигатель возможно еще назвать синхронной машиной постоянного тока с самосинхронизацией. Простой движок, являющийся машиной постоянного тока, состоит из постоянного магнита на индукторе (статоре), 1-го электромагнита с очевидно выраженными полюсами на якоре (двухзубцового якоря с явно выраженными полюсами и с одной обмоткой), щёточноколлекторного узла с 2-мя пластинами (ламелями) и 2-мя щётками.Простой двигатель имеет 2 положения ротора (2 “мёртвые точки”), из которых неосуществим самозапуск, и неравномерный крутящий момент. В первом приближении магнитное поле полюсов статора равномерное (однородное).
Данные двигатели с наличием щёточно-коллекторного узла бывают:
Колекторные – электрическое устройство, в котором датчиком положения ротора и переключателем тока в обмотках является одно и то же устройство — щёточно-коллекторный узел.
Бесколекторные – замкнутая электромеханическая система, состоящая из синхронного устройства с синусоидальным распределением магнитного поля в зазоре, датчика положения ротора, преобразователя координат и усилителя мощности. Более дорогой вариант в сравнение с колекторными двигателями.
Двигатели переменного тока
По типу работы данные двигатели делятся на синхронные и асинхронные двигатели. Принципное отличие заключается в том, что в синхронных машинах 1-ая гармоника магнитодвижущей силы статора перемещается со скоростью вращения ротора (по этому сам ротор крутится со скоростью вращения магнитного поля в статоре), а у асинхронных — есть и остается разница меж скоростью вращения ротора и скоростью вращения магнитного поля в статоре (поле крутится быстрее ротора).Синхронный – двигатель переменного тока, ротор которого крутится синхронно с магнитным полем питающего напряжения. Эти движки традиционно применяются при огромных мощностях (от сотен киловатт и выше).
Есть синхронные двигатели с дискретным угловым движением ротора — шаговые двигатели. У них данное положение ротора фиксируется подачей питания на соответствующие обмотки. Переход в другое положение исполняется путём снятия напряжения питания с одних обмоток и передачи его на другие обмотки двигателя.
Ещё один вид синхронных движков — вентильный реактивный эл-двигатель, питание обмоток которого складывается с помощью полупроводниковых элементов.
Асинхронный – двигатель переменного тока, в котором частота вращения ротора различается от частоты крутящего магнитного поля, творимого питающим напряжением, второе название асинхронных машин – индукционные обосновано тем, что ток в обмотке ротора индуцируется вертящимся полем статора. Асинхронные машины сейчас оформляют огромную часть электрических машин. В главном они используются в виде электродвигателей и считаются ключевыми преобразователями электрической энергии в механическую, причём в основном используются асинхронные движки с короткозамкнутым ротором
По количеству фаз двигатели бывают:
- однофазные
- двухфазные
- трехфазные
Самые популярные и шыроковостребованые двигатели которые применяются в производстве и бытовом хозяйстве:
Однофазный асинхронный двигатель с короткозамкнутым ротором
Однофазовый асинхронный движок имеет на статоре только 1 рабочую обмотку, на которую в ходе работы мотора подается переменный ток. Хотя для запуска мотора на его статоре есть и вспомогательная обмотка, которая краткосрочно подключается к сети через конденсатор либо индуктивность, или замыкается накоротко пусковыми контактами рубильника. Это нужно для создания исходного сдвига фаз, чтоб ротор начал крутиться, по другому пульсирующее магнитное поле статора не здвинуло б ротор с места.Ротор такового мотора, как и любого иного асинхронного мотора с короткозамкнутым ротором, являет из себя цилиндрический сердечник с залитыми алюминием пазами, с сразу отлитыми вентиляционными лопастями.
Таковой ротор именуется короткозамкнутым ротором. Однофазовые движки используются в маломощных устройствах, в том числе комнатные вентиляторы либо маленькие насосы.
Двухфазный асинхронный двигатель с короткозамкнутым ротором
Двухфазные асинхронные движки более эффективны при работе от однофазовой сети переменного тока. Они содержат на статоре две рабочие обмотки, находящиеся перпендикулярно, при этом одна из обмоток подключается к сети переменного тока напрямую, а вторая – через фазосдвигающий конденсатор, так выходит крутящееся магнитное поле, а вот без конденсатора ротор бы не двинулся с места.Данные двигатели помимо прочего имеют короткозамкнутый ротор, а их использование еще обширнее, нежели у однофазовых. Тут уже и стиральные машинки, и разные станки. Двухфазные движки для питания от однофазовых сетей называют конденсаторными двигателями, потому что фазосдвигающий конденсатор считается часто обязательной их частью.
Трехфазный асинхронный двигатель с короткозамкнутым ротором
Трехфазный асинхронный двигатель имеет на статоре три рабочие обмотки, сдвинутые сравнительно друг друга так, что при подключении в трехфазную сеть, их магнитные поля получаются смещенными в пространстве сравнительно друг дружку на 120 градусов. При включении трехфазного мотора к трехфазной сети переменного тока, появляется крутящееся магнитное поле, приводящее в перемещение короткозамкнутый ротор.Обмотки статора трехфазного мотора возможно соединить по схеме «звезда» либо «треугольник», при этом для питания мотора по схеме «звезда» потребуется напряжение выше, чем для схемы «треугольник», и на движке, потому, указываются 2 напряжения, к примеру: 127/220 либо 220/380. Трехфазные движки незаменимы для приведения в действие разных станков, лебедок, циркулярных пил, подъемных кранов, и т.п.
Трехфазный асинхронный двигатель с фазным ротором
Трехфазный асинхронный движок с фазным ротором имеет статор подобный описанным выше типам движков, шихтованный магнитопровод с 3-мя уложенными в его пазы обмотками, но в фазный ротор не залиты дюралевые стержни, а уложена уже настоящая трехфазная обмотка, в соединении «звезда». Концы звезды обмотки фазного ротора выведены на три контактных кольца, насаженных на вал ротора, и электрически отделенных от него.Посредством щеток, на кольца помимо прочего подается трехфазное переменное напряжение, и включение может быть осуществлено как впрямую, так и через реостаты. Непременно, движки с фазным ротором стоят подороже, хотя их пусковой момент под нагрузкой значительно повыше, нежели у типов движков с короткозамкнутым ротором. Именно в следствие завышенной силы и огромного пускового момента, данный вид движков отыскал использование в приводах лифтов и подъемных кранов, другими словами там, где прибор запускается под нагрузкой а не в холостую, как у двигателей с короткозамкнутым ротором.
Электродвигатель постоянного тока был изобретен раньше других типов машин, преобразующих электрическую энергию в механическую. Несмотря на то, что позднее самое широкое распространение получили двигатели переменного тока, существуют сферы применения, в которых нет альтернативы электродвигателям постоянного тока.
Электродвигатель постоянного и переменного тока
История изобретения
Электродвигатель Якоби.
Для того чтобы понять принцип работы электрических двигателей постоянного тока (ДПТ) мы обратимся к истории его создания. Итак, первые опытные доказательства того, что электрическую энергию можно превращать в механическую, продемонстрировал Майкл Фарадей. В 1821 году он провел опыт с проводником, опущенным в сосуд, наполненный ртутью, на дне которого располагался постоянный магнит. После подачи электричества на проводник, тот начинал вращаться вокруг магнита, демонстрируя свою реакцию на имеющееся в сосуде магнитное поле. Эксперимент Фарадея не нашел практического применения, но доказал возможность создания электрических машин, и дал старт развитию электромеханики.
Первый электрический двигатель постоянного тока, в основу которого был положен принцип вращения подвижной части (ротора) был создан русским физиком-механиком Борисом Семеновичем Якоби в 1834 году. Это устройство работало следующим образом:
Описанный принцип использовался в двигателе, который Якоби установил на лодке с 12 пассажирами в 1839 году. Судно двигалось рывками со скоростью в 3 км/ч против течения (по другим данным – 4.5 км/ч), но успешно пересекло реку и высадило пассажиров на берег. В качестве источника питания использовалась батарея с 320 гальваническими элементами, а движение осуществлялось с помощью лопастных колес.
Дальнейшее изучение вопроса привело исследователей к разрешению массы вопросов, касаемо того, какие источники питания лучше использовать, как улучшить его рабочие характеристики и оптимизировать габариты.
В 1886 году Фрэнком Джулиан Спрэгом впервые был сконструирован электродвигатель постоянного тока, близкий по конструкции тем, которые применяются в наши дни. В нем был реализован принцип самовозбуждения и принцип обратимости электрической машины. К этому моменту все двигатели данного типа перешли на питание от более подходящего источника – генератора постоянного тока.
Щёточно-коллекторный узел обеспечивает электрическое соединение цепи ротора с цепями, расположенными в неподвижной части машины
Устройство и принцип работы
В современных ДПТ используется все тот же принцип взаимодействия заряженного проводника с магнитным полем. С усовершенствованием технологий устройство лишь дополняется некоторыми элементами, улучшающими производительность. К примеру, в наши дни постоянные магниты используются лишь в двигателях низкой мощности, поскольку в крупных аппаратах они занимали бы слишком много места.
Основной принцип
Первоначальные прототипы двигателей данного типа были заметно проще современных аппаратов. Их примитивное устройство включало в себя лишь статор из двух магнитов и якорь с обмотками, на которые подавался ток. Изучив принцип взаимодействия магнитных полей, конструкторы определили следующий алгоритм работы двигателя:
- Подача питания создает на обмотках якоря электромагнитное поле.
- Полюса электромагнитного поля отталкиваются от одноименных полюсов поля постоянного магнита.
- Якорь вместе с валом, на котором он закреплен, вращается в соответствии с отталкивающимся полем обмотки.
Данный алгоритм отлично работал в теории, однако на практике перед создателями первых двигателей вставали характерные проблемы, препятствовавшие функционированию машины:
- Мертвое положение, из которого двигатель невозможно запустить – когда полюса точно сориентированы друг перед другом.
- Невозможность пуска из-за сильного сопротивления или слабого отталкивания полюсов.
- Ротор останавливается после совершения одного оборота. Это связано с тем, что после прохождения половины окружности притягивание магнита не разгоняло, а тормозило вращение ротора.
Решение первой проблемы было найдено довольно быстро – для этого было предложено использовать более двух магнитов. Позднее в устройство двигателя стали включать несколько обмоток и коллекторно-щеточный узел, который подавал питание только на одну пару обмоток в определенный момент времени.
Коллекторно-щеточная система подачи тока решает и проблему торможения ротора – переключение полярности происходит до того момента, когда вращение ротора начинает замедляться. Это значит, что во время одного оборота двигателя происходит как минимум два переключения полярности.
Проблема слабых пусковых токов рассматривается ниже в отдельном разделе.
Конструкция
Итак, постоянный магнит закрепляется на корпусе двигателя, образуя вместе с ним статор, внутри которого располагается ротор. После подачи питания на обмотке якоря возникает электромагнитное поле, вступающее во взаимодействие с магнитным полем статора, это приводит к вращению ротора, жестко посаженного на вал. Для передачи электрического тока от источника к якорю двигатель оснащается коллекторно-щеточным узлом, состоящим из:
- Коллектора. Он представляет собой токосъемное кольцо из нескольких секций, разделенных диэлектрическим материалом, подключается к обмоткам якоря и крепится непосредственно на валу двигателя.
- Графитовых щеток. Они замыкают цепь между коллектором и источником питания с помощью щеток, которые прижимаются к контактным площадкам коллектора прижимными пружинами.
Обмотки якоря одними концами соединяются между собой, а другими – с секциями коллектора, образуя таким образом цепь, по которой ток идет по следующему маршруту: входная щетка –> обмотка ротора -> выходная щетка.
Приведенная принципиальная схема (рис. 3) демонстрирует принцип работы примитивного электродвигателя постоянного тока с коллектором из двух секций:
- В этом примере мы будет считать стартовым положением ротора то, которое нарисовано на схеме. Итак, после подачи питания на нижнюю щетку, помеченную знаком «+», ток протекает по обмотке и создает вокруг нее электромагнитное поле.
- По правилу буравчика в левой нижней части формируется северный полюс якоря, а на правой верхней – южный. Располагаясь вблизи одноименных полюсов статора, они начинают отталкиваться, приводя тем самым ротор в движение, которое продолжается до тех пор, пока противоположные полюса не окажутся на минимальном друг от друга расстоянии, то есть придут в окончательное положение (рис. 1).
- Конструкция коллектора на данном этапе приведет к переключению полярности на обмотках якоря. В результате этого полюса магнитных полей снова окажутся на близком расстоянии и начнут отталкиваться.
- Ротор совершает полный оборот, и коллектор снова меняет полярность, продолжая его движение.
Детали электродвигателя постоянного тока
Здесь, как уже было отмечено, продемонстрирован принцип работы примитивного прототипа. В настоящих двигателях используется более двух магнитов, а коллектор состоит из большего числа контактных площадок, благодаря чему обеспечивается плавное вращение.
В высокомощных двигателях использование постоянных магнитов не представляется возможным из-за их большого размера. Альтернативой для них служит система из нескольких токопроводящих стержней, на каждой из которых имеется своя обмотка, подключаемая к питающим шинам. Одноименные полюса включаются в сеть последовательно. На корпусе может присутствовать от 1 до 4 пар полюсов, а их количеству должно соответствовать число токосъемных щеток на коллекторе.
Электродвигатели, рассчитанные на большую мощность, обладают рядом функциональных преимуществ перед более «легкими» аналогами. К примеру, здешнее устройство токосъемных щеток поворачивает их на определенный угол относительно вала для компенсации торможения вала, названного «реакцией якоря».
Пусковые токи
Постепенное оснащение ротора двигателя дополнительными элементами, обеспечивающими его бесперебойную работу и исключающими секторальное торможение, возникает проблема его запуска. Но все это увеличивает вес ротора – с учетом сопротивления вала столкнуть его с места становится сложнее. Первым решением этой проблемы, приходящим в голову, может быть увеличение силы тока, подаваемой на старте, но это может привести к неприятным последствиям:
- защитный автомат линии не выдержит тока и отключится;
- провода обмотки сгорят от перегрузки;
- секторы переключения на коллекторе приварятся от перегрева.
Поэтому такое решение можно назвать скорее рискованной полумерой.
Вообще, данная проблема является главным недостатком электродвигателей постоянного тока, но включает в себя основное их преимущество, благодаря которому они незаменимы в некоторых областях. Преимущество это заключается в прямой передаче момента вращения сразу же после пуска – вал (если тронется с места) будет крутиться с любой нагрузкой. Двигатели переменного тока на такое не способны.
Решить эту проблему полностью до сих пор не удалось. На сегодняшний день для пуска таких двигателей используется автомат-стартер, чей принцип работы схож с автомобильной коробкой передач:
- Сначала ток постепенно поднимается до пускового значения.
- После «сдвига» с места значение тока резко падает и снова плавно поднимается «подгоняя вращение вала».
- После подъема до предельного значения сила тока снова снижается и «подгоняется».
Данный цикл повторяется 3-5 раз (рис. 4) и решает необходимость старта двигателя без возникновения критических нагрузок в сети. Фактически, «плавный» запуск по-прежнему отсутствует, однако оборудование работает безопасно, а главное достоинство электродвигателя постоянного тока – крутящий момент – сохраняется.
Схемы подключения
Подключение ДПТ выполняется несколько сложнее, в сравнении с двигателями со спецификацией на переменный ток.
У двигателей высокой и средней мощности, как правило, есть специальные контакты обмотки возбуждения (ОВ) и якоря, вынесенные в клеммную коробку. Чаще всего на якорь подают выходное напряжение источника, а на ОВ – ток, отрегулированный, как правило, реостатом. Скорость вращения двигателя напрямую зависит от силы тока, поданного на обмотку возбуждения.
Есть три основные схемы включения якоря и обмотки возбуждения электродвигателей постоянного тока:
- Последовательное возбуждение используется в моторах, от которых требуется большая сила тока на старте (электрический транспорт, прокатное оборудование и т.п.). Данная схема предусматривает последовательное подключение ОВ и якоря к источнику. После подачи напряжения по обмоткам якоря и ОВ проходят токи одинаковой величины.Следует учитывать, что снижение нагрузки на вал даже на четверть при последовательном возбуждении приведет к резкому повышению оборотов, что может привести к поломке двигателя, поэтому эта схема и используется в условиях постоянной нагрузки.
- Параллельное возбуждение применяется в моторах, обеспечивающих работу станкового, вентиляторного и прочего оборудования, которое в момент пуска не оказывает высокую нагрузку на вал. В этой схеме для возбуждения ОВ используется независимая обмотка, регулируемая, чаще всего, реостатом.
- Независимое возбуждение очень схоже с параллельным, но в данном случае для подачи питания ОВ используется независимый источник, что исключает появление электрической связи между якорем и обмоткой возбуждения.
В современных электрических двигателях постоянного тока могут применяться смешанные схемы, основанные на базе трех описанных.
Регулировка скорости вращения
Способ регулирования оборотов ДПТ зависит от схемы его подключения:
- В моторах с параллельным возбуждением снижение оборотов относительно номинала можно производить изменяя напряжение якоря, а повышение – ослабляя поток возбуждения. Для увеличения оборотов (не более чем в 4 раза относительно номинальной величины) в цепь ОВ добавляется реостат.
- При последовательном возбуждении регулировка легко осуществляется переменным сопротивлением в цепи якоря. Правда этот метод подходит только для снижения оборотов и лишь в соотношениях 1:3 или 1:2 (кроме того, это приводит к большим потерям в реостате). Повышение осуществляется с помощью регулировочного реостата в цепи ОВ.
Данные схемы редко применяются в современном высокотехнологичном оборудовании, поскольку обладают узким диапазоном регулировки и другими недостатками. В наши дни для этих целей все чаще создают электронные схемы управления.
Реверсирование
Для того чтобы реверсировать (обратить) вращение двигателя постоянного тока необходимо:
- при последовательном возбуждении – просто изменить полярность входных контактов;
- при смешанном и параллельном возбуждении – необходимо менять направление тока в обмотке якоря; разрыв ОВ может привести к критическому повышению нагнетаемой электродвижущей силы и пробою изоляции проводов.
Сфера применения
Как вы уже поняли, использование электродвигателей постоянного тока целесообразно в условиях, когда постоянное беспрерывное подключение к сети неосуществимо. Хорошим примером здесь может служить автомобильный стартер, толкающий двигатель внутреннего сгорания «с места», или детские игрушки с моторчиком. В данных случаях для запуска двигателя используются аккумуляторные батареи. В промышленных целях ДПТ применяются на прокатных станах.
Основная же сфера применения ДПТ – электрический транспорт. Пароходы, электровозы, трамваи, троллейбусы и другие аналогичные имеют очень большое пусковое сопротивление, преодоление которого возможно только с помощью двигателей постоянного тока с их мягкими характеристиками и широкими пределами регулировки вращения. С учетом стремительного развития и популяризации экологических транспортных технологий, сфера применения ДПТ лишь увеличивается.
Самый простой щёточно-коллекторный узел
Достоинства и недостатки
Резюмируя все вышесказанное, можно описать характерные для электродвигателей постоянного тока достоинства и недостатки относительно их аналогов, рассчитанных на работу от переменного тока.
Основные достоинства:
- ДПТ незаменимы в ситуациях, когда необходим сильный пусковой момент;
- скорость вращения якоря легко регулируется;
- двигатель постоянного тока является универсальной электрической машиной, то есть может применяться в качестве генератора.
Главные недостатки:
- ДПТ имеют высокую производственную стоимость;
- использование щеточно-коллекторного узла приводит к необходимости частого техобслуживания и ремонта;
- для работы нужен источник постоянного тока или выпрямители.
Электродвигатели постоянного тока, безусловно, проигрывают своим «переменным» сородичам по стоимости и надежности, однако используются и будут использоваться, поскольку плюсы от их использования в определенных сферах категорические перечеркивают все минусы.
Электродвигатели постоянного тока применяют в тех электроприводах, где требуется большой диапазон регулирования скорости, большая точность поддержания скорости вращения привода, регулирования скорости вверх от номинальной.
Работа электрического двигателя постоянного тока основана на . Из основ электротехники известно, что на проводник с током, помещенный в , действует сила, определяемая по правилу левой руки:
F = BIL,
где I – ток, протекающий по проводнику, В – индукция магнитного поля; L – длина проводника.
При пересечении проводником магнитных силовых линий машины в нем наводится , которая по отношению к току в проводнике направлена против него, поэтому он а называется обратной или противодействующей (противо-э. д. с). Электрическая мощность в двигателе преобразуется в механическую и частично тратится на нагревание проводника.
Конструктивно все электрические двигатели постоянного тока состоят из индуктора и якоря , разделенных воздушным зазором.
Индуктор электродвигателя постоянного тока служит для создания неподвижного магнитного поля машины и состоит из станины, главных и добавочных полюсов. Станина служит для крепления основных и добавочных полюсов и является элементом магнитной цепи машины. На главных полюсах расположены обмотки возбуждения, предназначенные для создания магнитного поля машины, на добавочных полюсах – специальная обмотка, служащая для улучшения условий коммутации.
Якорь электродвигателя постоянного тока состоит из магнитной системы, собранной из отдельных листов , рабочей обмотки, уложенной в пазы, и служащего для подвода к рабочей обмотке постоянного тока .
Коллектор представляет собой цилиндр, насаженный на вал двигателя и избранный из изолированных друг от друга медных пластин. На коллекторе имеются выступы-петушки, к которым припаяны концы секций обмотки якоря. Съем тока с коллектора осуществляется с помощью щеток, обеспечивающих скользящий контакт с коллектором. Щетки закреплены в щеткодержателях , которые удерживают их в определенном положении и обеспечивают необходимое нажатие щетки на поверхность коллектора. Щетки и щеткодержатели закреплены на траверсе, связанной с корпусом электродвигателя .
Коммутация в электродвигателях постоянного тока
В процессе работы электродвигателя постоянного тока щетки, скользя по поверхности вращающегося коллектора, последовательно переходят с одной коллекторной пластины на другую. При этом происходит переключение параллельных секций обмотки якоря и изменение тока в них. Изменение тока происходит в то время, когда виток обмотки замкнут щеткой накоротко. Этот процесс переключения и явления, связанные с ним, называются коммутацией .
В момент коммутации в короткозамкнутой секции обмотки под влиянием собственного магнитного поля наводится э. д. с. самоиндукции. Результирующая э. д. с. вызывает в короткозамкнутой секции дополнительный ток, который создает неравномерное распределение плотности тока на контактной поверхности щеток. Это обстоятельство считается основной причиной искрения коллектора под щеткой. Качество коммутации оценивается по степени искрения под сбегающим краем щетки и определяется по шкале степеней искрения.
Способы возбуждения электродвигателей постоянного тока
Под возбуждением электрических машин понимают создание в них магнитного поля, необходимого для работы электродвигателя . Схемы возбуждения электродвигателей постоянного тока показаны на рисунке .
По способу возбуждения электрические двигатели постоянного тока делят на четыре группы:
1. С независимым возбуждением, у которых обмотка возбуждения НОВ питается от постороннего источника постоянного тока.
2. С параллельным возбуждением (шунтовые), у которых обмотка возбуждения ШОВ включается параллельно источнику питания обмотки якоря.
3. С последовательным возбуждением (сериесные), у которых обмотка возбуждения СОВ включена последовательно с якорной обмоткой.
4. Двигатели со смешаным возбуждением (компаундные), у которых имеется последовательная СОВ и параллельная ШОВ обмотки возбуждения.
Типы двигателей постоянного тока
Двигатели постоянного тока прежде всего различаются по характеру возбуждения. Двигатели могут быть независимого, последовательного и смешанного возбуждения. Параллельное возбуждение можно не рассматривать. Даже если обмотка возбуждения подключается к той же сети, от которой питается цепь якоря, то и в этом случае ток возбуждения не зависит от тока якоря, так как питающую сеть можно рассматривать как сеть бесконечной мощности, а ее напряжение постоянным.
Обмотку возбуждения всегда подключают непосредственно к сети, и поэтому введение добавочного сопротивления в цепь якоря не оказывает влияния на режим возбуждения. Той специфики, которая существует , здесь быть не может.
В двигателях постоянного тока малой мощности часто используют магнитоэлектрическое возбуждение от постоянных магнитов. При этом существенно упрощается схема включения двигателя, уменьшается расход меди. Следует однако иметь в виду, что, хотя обмотка возбуждения исключается, габариты и масса магнитной системы не ниже, чем при электромагнитном возбуждении машины.
Свойства двигателей в значительной мере определяются их системой возбуждения.
Чем больше габариты двигателя, тем, естественно, больше развиваемый им момент и соответственно мощность. Поэтому при большей скорости вращения и тех же габаритах можно получить большую мощность двигателя. В связи с этим, как правило, двигатели постоянного тока, особенно малой мощности, проектируются на большую частоту вращения – 1000-6000 об/мин.
Следует, однако, иметь в виду, что скорость вращения рабочих органов производственных машин существенно ниже. Поэтому между двигателем и рабочей машиной приходится устанавливать редуктор. Чем больше скорость двигателя, тем более сложным и дорогим получается редуктор. В установках большой мощности, где редуктор представляет собой дорогостоящий узел, двигатели проектируются на существенно меньшие скорости.
Следует еще иметь в виду, что механический редуктор всегда вносит значительную погрешность. Поэтому в прецизионных установках желательно использовать тихоходные двигатели, которые можно было бы сочленить с рабочими органами либо напрямую, либо посредством простейшей передачи. В связи с этим появились так называемые высокомоментные двигатели на низкие скорости вращения. Эти двигатели нашли широкое применение в металлорежущих станках, где сочленяются с органами перемещения без каких-либо промежуточных звеньев посредством шарико-винтовых передач.
Электрические двигатели отличаются также по конструктивным при знакам, связанным с условиями их работы. Для нормальных условий используются так называемые открытые и защищенные двигатели, охлаждаемые воздухом помещения, в котором они устанавливаются.
Воздух продувается через каналы машины посредством вентилятора, размещенного на валу двигателя. В агрессивных средах используются закрытые двигатели, охлаждение которых осуществляется за счет внешней ребристой поверхности или наружного обдува. Наконец, выпускаются специальные двигатели для взрывоопасной среды.
Специфические требования к конструктивным формам двигателя предъявляются при необходимости обеспечения высокого быстродействия – быстрого протекания процессов разгона, торможения. В этом случае двигатель должен иметь специальную геометрию – малый диаметр якоря при большой его длине.
Для уменьшения индуктивности обмотки ее укладывают не в пазы, а на поверхность гладкого якоря. Крепится обмотка клеющими составами типа эпоксидной смолы. При малой индуктивности обмотки существенно улучшаются условия коммутации на коллекторе, отпадает необходимость в дополнительных полюсах, может быть использован коллектор меньших размеров. Последнее дополнительно уменьшает момент инерции якоря двигателя.
Еще большие возможности для снижения механической инерции дает использование полого якоря, представляющего собой цилиндр из изоляционного материала. На поверхности этого цилиндра располагается обмотка, изготовляемая печатным способом, штамповкой или из про волоки по шаблону на специальном станке. Крепление обмотки осуществляется клеющими материалами.
Внутри вращающегося цилиндра располагается стальной сердечник, необходимый для создания путей прохождения магнитного потока. В двигателях с гладким и полым якорями вследствие увеличения зазоров в магнитной цепи, обусловленного внесением в них обмотки и изоляционных материалов, требуемая намагничивающая сила для проведения необходимого магнитного потока существенно возрастает. Соответственно магнитная система получается более развитой.
К числу малоинерционных двигателей относятся также двигатели с дисковыми якорями. Диски, на которые наносятся или наклеиваются обмотки, изготовляются из тонкого изоляционного материала, не подверженного короблению, например из стекла. Магнитная система при двухполюсном исполнении представляет собой две скобы, на одной из которых размещены обмотки возбуждения. В связи с малой индуктивностью обмотки якоря машина, как правило, не имеет коллектора и съем тока осуществляется щетками непосредственно с обмотки.
Следует еще упомянуть о линейном двигателе, обеспечивающем не
вращательное движение, а поступательное. Он представляет собой двигатель,
магнитная система которого как бы развернута и полюсы устанавливаются на линии движения якоря и соответствующего рабочего
органа машины. Якорь обычно выполняется как малоинерционный.
Габариты и стоимость двигателя велики, так как необходимо значительное число полюсов для обеспечения перемещения на заданном отрезке пути.
Пуск двигателей постоянного тока
В начальный момент пуска двигателя якорь неподвижен и противо-э. д. с. и напряжение в якоре равна нулю, поэтому Iп = U / Rя.
Сопротивление цепи якоря невелико, поэтому пусковой ток превышает в 10 – 20 раз и более номинальный. Это может вызвать значительные в обмотке якоря и чрезмерный ее перегрев, поэтому пуск двигателя производят с помощью – активных сопротивлений, включаемых в цепь якоря.
Двигатели мощностью до 1 кВт допускают прямой пуск.
Величина сопротивления пускового реостата выбирается по допустимому пусковому току двигателя. Реостат выполняют ступенчатым для улучшения плавности пуска электродвигателя.
В начале пуска вводится все сопротивление реостата. По мере увеличения скорости якоря возникает противо-э. д. с, которая ограничивает пусковые токи. Постепенно выводя ступень за ступенью сопротивление реостата из цепи якоря, увеличивают подводимое к якорю напряжение.
Регулирование частоты вращения электродвигателя постоянного тока
Частота вращения двигателя постоянного тока:
где U – напряжение питающей сети; Iя – ток якоря; R я – сопротивление цепн якоря; kc – коэффициент, характеризующий магнитную систему; Ф – магнитный поток электродвигателя.
Из формулы видно, что частоту вращения электродвигателя постоянного тока можно регулировать тремя путями: изменением потока возбуждения электродвигателя, изменением подводимого к электродвигателю напряжения и изменением сопротивления в цепи якоря.
Наиболее широкое применение получили первые два способа регулирования, третий способ применяют редко: он неэкономичен, скорость двигателя при этом значительно зависит от колебаний нагрузки. Механические характеристики, которые при этом получаются, показаны на рисунке .
Жирная прямая – это естественная зависимость скорости от момента на валу, или , что то же, от тока якоря. Прямая естественной механической характеристики несколько отклоняется от горизонтальном штриховой линии. Это отклонение называют нестабильностью, нежесткостью, иногда статизмом. Группа непаралельных прямых I соответствует регулированию скорости возбуждением, параллельные прямые II получаются в результате изменения напряжения якоря, наконец, веер III – это результат введения в цепь якоря активного сопротивления.
Величину тока возбуждения двигателя постоянного тока можно регулировать с помощью реостата или любого устройства, активное сопротивление которого можно изменять по величине, например транзистора. При увеличении сопротивления в цепи ток возбуждения уменьшается, частота вращения двигателя увеличивается. При ослаблении магнитного потока механические характеристики располагаются выше естественной (т. е. выше характеристики при отсутствии реостата). Повышение частоты вращения двигателя вызывает усиление искрения под щетками. Кроме того, при работе электродвигателя с ослабленным потоком уменьшается устойчивость его работы, особенно при переменных нагрузках на валу. Поэтому пределы регулирования скорости таким способом не превышают 1,25 – 1,3 от номинальной.
Регулирование изменением напряжения требует источника постоянного тока, например генератора или преобразователя. Такое регулирование используют во всех промышленных системах электропривода: генератор – д вигатель постоянного тока (Г – ДПТ), электромашинный усилитель – двигатель постоянного тока (ЭМУ – ДПТ), магнитный усилитель – двигатель постоянного тока (МУ – ДПТ), – двигатель постоянного тока (Т – ДПТ).
Торможение электродвигателей постоянного тока
В электроприводах с электродвигателями постоянного тока применяют три способа торможения: динамическое, рекуперативное и торможение противовключением.
Динамическое торможение осуществляется путем замыкания обмотки якоря двигателя накоротко или через . При этом электродвигатель постоянного тока начинает работать как генератор, преобразуя запасенную им механическую энергию в электрическую. Эта энергия выделяется в виде тепла в сопротивлении, на которое замкнута обмотка якоря. Динамическое торможение обеспечивает точный останов электродвигателя.
Рекуперативное торможение электродвигателя постоянного тока осуществляется в том случае, когда включенный в сеть электродвигатель вращается исполнительным механизмом со скоростью, превышающей скорость идеального холостого хода. Тогда э. д. с, наведенная в обмотке двигателя, превысит значение напряжения сети, ток в обмотке двигателя изменяет направление на противоположное. Электродвигатель переходит на работу в генераторном режиме, отдавая энергию в сеть. Одновременно на его валу возникает тормозной момент. Такой режим может быть получен в приводах подъемных механизмов при опускании груза, а также при регулировании скорости двигателя и во время тормозных процессов в электроприводах постоянного тока.
Рекуперативное торможение двигателя постоянного тока является наиболее экономичным способом, так как в этом случае происходит возврат в сеть электроэнергии. В электроприводе металлорежущих станков этот способ применяют при регулировании скорости в системах Г – ДПТ и ЭМУ – ДПТ.
Торможение противовключением электродвигателя постоянного тока осуществляется путем изменения полярности напряжения и тока в обмотке якоря. При взаимодействии тока якоря с магнитным полем обмотки возбуждения создается тормозной момент, который уменьшается по мере уменьшения частоты вращения электродвигателя. При уменьшении частоты вращения электродвигателя до нуля электродвигатель должен быть отключен от сети, иначе он начнет разворачиваться в обратную сторону.
Состоит из вращающихся нагнетательных элементов, помещенных на статически закрепленную станину. Подобные устройства широко востребованы в технических областях, где требуется повышение диапазона регулировки скоростей, поддержание стабильного вращения привода.
Конструкция
Конструктивно электродвигатель постоянного тока состоит из ротора (якоря), индуктора, коллектора и щеток. Давайте рассмотрим, что представляет собой каждый элемент системы:
- Ротор состоит из множества катушек, что покрыты проводящей ток обмоткой. Некоторые электродвигатели постоянного тока 12 вольт содержат до 10 и более катушек.
- Индуктор – неподвижная часть агрегата. Состоит из магнитных полюсов и станины.
- Коллектор – функциональный элемент двигателя в виде цилиндра, размещенного на валу. Содержит изоляцию в виде медных пластин, а также выступы, которые находятся в скользящем контакте с щетками двигателя.
- Щетки – неподвижно закрепленные контакты. Предназначены для подводки электрического тока к ротору. Чаще всего электродвигатель постоянного тока оснащается графитовыми и медно-графитовыми щетками. Вращение вала приводит к замыканию и размыканию контактов между щетками и ротором, что вызывает искрение.
Работа электродвигателя постоянного тока
Механизмы данной категории содержат специальную обмотку возбуждения на индукторной части, куда поступает постоянный ток, что в последующем преобразуется в магнитное поле.
Обмотка ротора поддается воздействию потока электроэнергии. Со стороны магнитного поля на данный конструктивный элемент оказывает влияние сила Ампера. В результате образуется крутящий момент, что проворачивает роторную часть на 90 о. Продолжается вращение рабочих валов двигателя за счет образования эффекта коммутации на щеточно-коллекторном узле.
При поступлении электрического тока на ротор, который находится под воздействием магнитного поля индуктора, электродвигатели постоянного тока (12 вольт) создают момент силы, что приводит к выработке энергии в процессе вращения валов. Механическая энергия передается от ротора к прочим элементам системы посредством ременной передачи.
Типы
В настоящее время выделяют несколько категорий электродвигателей постоянного тока:
- С независимым возбуждением – питание обмотки происходит от независимого источника энергии.
- С последовательным возбуждением – обмотка якоря включена последовательно с обмоткой возбуждения.
- С параллельным возбуждением – обмотка ротора включена в электрическую цепь параллельно источнику питания.
- Со смешанным возбуждением – двигатель содержит несколько обмоток: последовательную и параллельную.
Управление электродвигателем постоянного тока
Пуск двигателя осуществляется за счет работы специальных реостатов, которые создают активное сопротивление, включаемое в цепь ротора. Для обеспечения плавного запуска механизма реостат обладает ступенчатой структурой.
Для старта реостата задействуется все его сопротивление. По мере роста скорости вращения возникает противодействие, что накладывает ограничение на рост силы пусковых токов. Постепенно ступень за ступенью увеличивается подводимое к ротору напряжение.
Электродвигатель постоянного тока позволяет регулировать скорость вращения рабочих валов, что осуществляется следующим образом:
- Показатель скорости ниже номинальной корректируется изменением напряжения на роторе агрегата. При этом крутящий момент остается стабильным.
- Темп работы выше номинального регулируется током, который возникает на обмотке возбуждения. Значение крутящего момента снижается при поддержании постоянной мощности.
- Управление роторным элементом осуществляется при помощи специализированных тиристорных преобразователей, которые представляют собой приводы постоянного тока.
Преимущества и недостатки
Сравнивая электродвигатели постоянного тока с агрегатами, функционирующими на переменном токе, стоит отметить их повышенную производительность и увеличенный коэффициент полезного действия.
Оборудование данной категории отлично справляется с отрицательным воздействием факторов окружающей среды. Способствует этому наличие полностью закрытого корпуса. Конструкция электродвигателей постоянного тока предусматривает наличие уплотнений, что исключают проникновение влаги в систему.
Защита в виде надежных изоляционных материалов дает возможность задействовать максимальный ресурс агрегатов. Допускается применение подобного оборудования при температурных условиях в пределах от -50 до +50 о С и относительной влажности воздуха порядка 98 %. Запуск механизма возможен после периода длительного простоя.
Среди недостатков электрических двигателей постоянного тока на первое место выходит достаточно быстрый износ щеточных узлов, что требует соответствующих расходов на обслуживание. Сюда же относится крайне ограниченный срок службы коллектора.
Создающая магнитный поток для образования момента. Идуктор обязательно включает либо постоянные магниты либо обмотку возбуждения . Индуктор может быть частью как ротора так и статора. В двигателе, изображенном на рис. 1, система возбуждения состоит из двух постоянных магнитов и входит в состав статора.
Типы коллекторных электродвигателей
По конструкции статора коллекторный двигатель может быть и .
Схема коллекторного двигателя с постоянными магнитами
Коллекторный двигатель постоянного тока (КДПТ) с постоянными магнитами является наиболее распространенным среди КДПТ. этого двигателя включает постоянные магниты, которые создают магнитное поле статора. Коллекторные двигатели постоянного тока с постоянными магнитами (КДПТ ПМ) обычно используются в задачах не требующих больших мощностей. КДПТ ПМ дешевле в производстве, чем коллекторные двигатели с обмотками возбуждения. При этом момент КДПТ ПМ ограничен полем постоянных магнитов статора. КДПТ с постоянными магнитами очень быстро реагирует на изменение напряжения. Благодаря постоянному полю статора легко управлять скоростью двигателя. Недостатком электродвигателя постоянного тока с постоянными магнитами является то, что со временем магниты теряют свои магнитные свойства, в результате чего уменьшается поле статора и снижаются характеристики двигателя.
- Преимущества:
- лучшее соотношение цена/качество
- высокий момент на низких оборотах
- быстрый отклик на изменение напряжения
- Недостатки:
- постоянные магниты со временем, а также под воздействием высоких температур теряют свои магнитные свойства
Коллекторный двигатель с обмотками возбуждения
- По схеме подключения обмотки статора коллекторные электродвигатели с обмотками возбуждения разделяют на двигатели:
Схема независимого возбуждения
Схема параллельного возбуждения
Схема последовательного возбуждения
Схема смешанного возбуждения
Двигатели независимого и параллельного возбуждения
В электродвигателях независимого возбуждения обмотка возбуждения электрически не связана с обмоткой (рисунок выше). Обычно напряжение возбуждения U ОВ отличается от напряжения в цепи якоря U. Если же напряжения равны, то обмотку возбуждения подключают параллельно обмотке якоря. Применение в электроприводе двигателя независимого или параллельного возбуждения определяется схемой электропривода. Свойства (характеристики) этих двигателей одинаковы .
В двигателях параллельного возбуждения токи обмотки возбуждения (индуктора) и якоря не зависят друг от друга, а полный ток двигателя равен сумме тока обмотки возбуждения и тока якоря. Во время нормальной работы, при увеличении напряжения питания увеличивается полный ток двигателя, что приводит к увеличению полей статора и ротора. С увеличением полного тока двигателя скорость так же увеличивается, а момент уменьшается. При нагружении двигателя ток якоря увеличивается, в результате чего увеличивается поле якоря. При увеличении тока якоря, ток индуктора (обмотки возбуждения) уменьшается, в результате чего уменьшается поле индуктора, что приводит к уменьшению скорости двигателя, и увеличению момента.
- Преимущества:
- практически постоянный момент на низких оборотах
- хорошие регулировочные свойства
- отсутствие потерь магнетизма со временем (так как нет постоянных магнитов)
- Недостатки:
- дороже КДПТ ПМ
- двигатель выходит из под контроля, если ток индуктора падает до нуля
Коллекторный электродвигатель параллельного возбуждения имеет с уменьшающимся моментом на высоких оборотах и высоким, но более постоянным моментом на низких оборотах. Ток в обмотке индуктора и якоря не зависит друг от друга, таким образом, общий ток электродвигателя равен сумме токов индуктора и якоря. Как результат данный тип двигателей имеет отличную характеристику управления скоростью. Коллекторный двигатель постоянного тока с параллельной обмоткой возбуждения обычно используется в приложениях, которые требуют мощность больше 3 кВт, в частности в автомобильных приложениях и промышленности. В сравнении с , двигатель параллельного возбуждения не теряет магнитные свойства со временем и является более надежным. Недостатками двигателя параллельного возбуждения являются более высокая себестоимость и возможность выхода двигателя из под контроля, в случае если ток индуктора снизится до нуля, что в свою очередь может привести к поломке двигателя .
В электродвигателях последовательного возбуждения обмотка возбуждения включена последовательно с обмоткой якоря, при этом ток возбуждения равен току якоря (I в = I а), что придает двигателям особые свойства. При небольших нагрузках, когда ток якоря меньше номинального тока (I а < I ном) и магнитная система двигателя не насыщена (Ф ~ I а), электромагнитный момент пропорционален квадрату тока в обмотке якоря:
- где M – , Н∙м,
- с М – постоянный коэффициент, определяемый конструктивными параметрами двигателя,
- Ф – основной магнитный поток, Вб,
- I a – ток якоря, А.
С ростом нагрузки магнитная система двигателя насыщается и пропорциональность между током I а и магнитным потоком Ф нарушается. При значительном насыщении магнитный поток Ф с ростом I а практически не увеличивается. График зависимости M=f(I a) в начальной части (когда магнитная система не насыщена) имеет форму параболы, затем при насыщении отклоняется от параболы и в области больших нагрузок переходит в прямую линию .
Важно: Недопустимо включать двигатели последовательного возбуждения в сеть в режиме холостого хода (без нагрузки на валу) или с нагрузкой менее 25% от номинальной, так как при малых нагрузках частота вращения якоря резко возрастает, достигая значений, при которых возможно механическое разрушение двигателя, поэтому в приводах с двигателями последовательного возбуждения недопустимо применять ременную передачу, при обрыве которой двигатель переходит в режим холостого хода. Исключение составляют двигатели последовательного возбуждения мощностью до 100-200 Вт, которые могут работать в режиме холостого хода, так как их мощность механических и магнитных потерь при больших частотах вращения соизмерима с номинальной мощностью двигателя.
Способность двигателей последовательного возбуждения развивать большой электромагнитный момент обеспечивает им хорошие пусковые свойства.
Коллекторный двигатель последовательного возбуждения имеет высокий момент на низких оборотах и развивает высокую скорость при отсутствии нагрузки. Данный электромотор идеально подходит для устройств, которым требуется развивать высокий момент (краны и лебедки), так как ток и статора и ротора увеличивается под нагрузкой. В отличии от и двигателей параллельного возбуждения двигатель последовательного возбуждения не имеет точной характеристики контроля скорости, а в случае короткого замыкания обмотки возбуждения он может стать не управляемым.
Двигатель смешанного возбуждения имеет две обмотки возбуждения, одна из них включена параллельно обмотке якоря, а вторая последовательно. Соотношение между намагничивающими силами обмоток может быть различным, но обычно одна из обмоток создает большую намагничивающую силу и эта обмотка называется основной, вторая обмотка называется вспомогательной. Обмотки возбуждения могут быть включены согласовано и встречно, и соответственно магнитный поток создается суммой или разностью намагничивающих сил обмоток. Если обмотки включены согласно, то характеристики скорости такого двигателя располагаются между характеристиками скорости двигателей параллельного и последовательного возбуждения. Встречное включение обмоток применяется, когда необходимо получить неизменную скорость вращения или увеличение скорости вращения с увеличением нагрузки. Таким образом, рабочие характеристики двигателя смешанного возбуждения приближаются к характеристикам двигателя параллельного или последовательного возбуждения, смотря по тому, какая из обмоток возбуждения играет главную роль
Лабораторная работа электрические машины постоянного тока. Как работает двигатель постоянного тока? (анимация и видео)
Любой электрический двигатель предназначен для совершения механической работы за счет расхода приложенной к нему электроэнергии, которая преобразуется, как правило, во вращательное движение. Хотя в технике встречаются модели, которые сразу создают поступательное движение рабочего органа. Их называют линейными двигателями.
В промышленных установках электромоторы приводят в действие различные станки и механические устройства, участвующие в технологическом производственном процессе.
Внутри бытовых приборов электродвигатели работают в стиральных машинах, пылесосах, компьютерах, фенах, детских игрушках, часах и многих других устройствах.
Основные физические процессы и принцип действия
На движущиеся внутри электрические заряды, которые называют электрическим током, всегда действует механическая сила, стремящаяся отклонить их направление в плоскости, расположенной перпендикулярно ориентации магнитных силовых линий. Когда электрический ток проходит по металлическому проводнику или выполненной из него катушке, то эта сила стремится подвинуть/повернуть каждый проводник с током и всю обмотку в целом.
На картинке ниже показана металлическая рамка, по которой течет ток. Приложенное к ней магнитное поле создает для каждой ветви рамки силу F, создающую вращательное движение.
Это свойство взаимодействия электрической и магнитной энергии на основе создания электродвижущей силы в замкнутом токопроводящем контуре положено в работу любого электродвигателя. В его конструкцию входят:
обмотка, по которой протекает электрический ток. Ее располагают на специальном сердечнике-якоре и закрепляют в подшипниках вращения для уменьшения противодействия сил трения. Эту конструкцию называют ротором;
статор, создающий магнитное поле, которое своими силовыми линиями пронизывает проходящие по виткам обмотки ротора электрические заряды;
корпус для размещения статора. Внутри корпуса сделаны специальные посадочные гнезда, внутри которых вмонтированы внешние обоймы подшипников ротора.
Упрощенно конструкцию наиболее простого электродвигателя можно представить картинкой следующего вида.
При вращении ротора создается крутящий момент, мощность которого зависит от общей конструкции устройства, величины приложенной электрической энергии, ее потерь при преобразованиях.
Величина максимально возможной мощности крутящего момента двигателя всегда меньше приложенной к нему электрической энергии. Она характеризуется величиной коэффициента полезного действия.
Виды электродвигателей
По виду протекающего по обмоткам тока их подразделяют на двигатели постоянного или переменного тока. Каждая из этих двух групп имеет большое количество модификаций, использующих различные технологические процессы.
Электродвигатели постоянного тока
У них магнитное поле статора создается стационарно закрепленными либо специальными электромагнитами с обмотками возбуждения. Обмотка якоря жестко вмонтирована в вал, который закреплен в подшипниках и может свободно вращаться вокруг собственной оси.
Принципиальное устройство такого двигателя показано на рисунке.
На сердечнике якоря из ферромагнитных материалов расположена обмотка, состоящая из двух последовательно соединенных частей, которые одним концом подключены к токопроводящим коллекторным пластинам, а другим скоммутированы между собой. Две щетки из графита расположены на диаметрально противоположных концах якоря и прижимаются к контактным площадкам коллекторных пластин.
На нижнюю щетку рисунка подводится положительный потенциал постоянного источника тока, а на верхнюю – отрицательный. Направление протекающего по обмотке тока показано пунктирной красной стрелкой.
Ток вызывает в нижней левой части якоря магнитное поле северного полюса, а в правой верхней – южного (правило буравчика). Это приводит к отталкиванию полюсов ротора от одноименных стационарных и притяжению к разноименным полюсам на статоре. В результате приложенной силы возникает вращательное движение, направление которого указывает коричневая стрелка.
При дальнейшем вращении якоря по инерции полюса переходят на другие коллекторные пластины. Направление тока в них изменяется на противоположное. Ротор продолжает дальнейшее вращение.
Простая конструкция подобного коллекторного устройства приводит к большим потерям электрической энергии. Подобные двигатели работают в приборах простой конструкции или игрушках для детей.
Электродвигатели постоянного тока, участвующие в производственном процессе, имеют более сложную конструкцию:
обмотка секционирована не на две, а на большее количество частей;
каждая секция обмотки смонтирована на своем полюсе;
коллекторное устройство выполнено определенным количеством контактных площадок по числу секций обмоток.
В результате этого создается плавное подключение каждого полюса через свои контактные пластины к щеткам и источнику тока, снижаются потери электроэнергии.
Устройство подобного якоря показано на картинке.
У электрических двигателей постоянного тока можно реверсировать направление вращения ротора. Для этого достаточно изменить движение тока в обмотке на противоположное сменой полярности на источнике.
Электродвигатели переменного тока
Они отличаются от предыдущих конструкций тем, что электрический ток, протекающий в их обмотке, описывается по , периодически изменяющему свое направление (знак). Для их питания напряжение подается от генераторов со знакопеременной величиной.
Статор таких двигателей выполняется магнитопроводом. Его делают из ферромагнитных пластин с пазами, в которые помещают витки обмотки с конфигурацией рамки (катушки).
Синхронные электродвигатели
На картинке ниже показан принцип работы однофазного двигателя переменного тока
с синхронным вращением электромагнитных полей ротора и статора.
В пазах статорного магнитопровода по диаметрально противоположным концам размещены проводники обмотки, схематично показанные в виде рамки, по которой протекает переменный ток.
Рассмотрим случай для момента времени, соответствующего прохождению положительной части его полуволны.
В обоймах подшипника свободно вращается ротор с вмонтированным постоянным магнитом, у которого ярко выражены северный «N рот» и южный «S рот» полюса. При протекании положительной полуволны тока по обмотке статора в ней создается магнитное поле с полюсами «S ст» и «N ст».
Между магнитными полями ротора и статора возникают силы взаимодействия (одноименные полюса отталкиваются, а разноименные – притягиваются), которые стремятся повернуть якорь электродвигателя из произвольного положения в окончательное, когда осуществляется максимально близкое расположение противоположных полюсов относительно друг друга.
Если рассматривать этот же случай, но для момента времени, когда по рамочному проводнику протекает обратная – отрицательная полуволна тока, то вращение якоря будет происходить в противоположную сторону.
Для придания непрерывного движения ротору в статоре делают не одну обмотку-рамку, а определенное их количество с таким учетом, чтобы каждая их них питалась от отдельного источника тока.
Принцип работы трехфазного двигателя переменного тока с синхронным вращением
электромагнитных полей ротора и статора показан на следующей картинке.
В этой конструкции внутри магнитопровода статора смонтированы три обмотки А, В и С, смещенные на углы 120 градусов между собой. Обмотка А выделена желтым цветом, В – зеленым, а С – красным. Каждая обмотка выполнена такими же рамками, как и в предыдущем случае.
На картинке для каждого случая ток проходит только по одной обмотке в прямом или обратном направлении, которое показано значками «+» и «-».
При прохождении положительной полуволны по фазе А в прямом направлении ось поля ротора занимает горизонтальное положение потому, что магнитные полюса статора формируются в этой плоскости и притягивают подвижный якорь. Разноименные полюса ротора стремятся приблизиться к полюсам статора.
Когда положительная полуволна пойдет по фазе С, то якорь повернется на 60 градусов по ходу часовой стрелки. После подачи тока в фазу В произойдет аналогичный поворот якоря. Каждое очередное протекание тока в очередной фазе следующей обмотки будет вращать ротор.
Если к каждой обмотке подвести сдвинутое по углу 120 градусов напряжение трехфазной сети, то в них будут циркулировать переменные токи, которые раскрутят якорь и создадут его синхронное вращение с подведенным электромагнитным полем.
Эта же механическая конструкция успешно применяется в трехфазном шаговом двигателе
. Только в каждую обмотку с помощью управления подаются и снимаются импульсы постоянного тока по описанному выше алгоритму.
Их запуск начинает вращательное движение, а прекращение в определенный момент времени обеспечивает дозированный поворот вала и остановку на запрограммированный угол для выполнения определенных технологических операций.
В обеих описанных трехфазных системах возможно изменение направления вращения якоря. Для этого надо просто поменять чередование фаз «А»-«В»-«С» на другое, например, «А»-«С»-«В».
Скорость вращения ротора регулируется продолжительностью периода Т. Его сокращение приводит к ускорению вращения. Величина амплитуды тока в фазе зависит от внутреннего сопротивления обмотки и значения приложенного к ней напряжения. Она определяет величину крутящего момента и мощности электрического двигателя.
Асинхронные электродвигатели
Эти конструкции двигателей имеют такой же статорный магнитопровод с обмотками, как и в ранее рассмотренных однофазных и трехфазных моделях. Они получили свое название из-за несинхронного вращения электромагнитных полей якоря и статора. Сделано это за счет усовершенствования конфигурации ротора.
Его сердечник набран из пластин электротехнических марок стали с пазами. В них вмонтированы алюминиевые либо медные тоководы, которые по концам якоря замкнуты токопроводящими кольцами.
Когда к обмоткам статора подводится напряжение, то в обмотке ротора электродвижущей силой наводится электрический ток и создается магнитное поле якоря. При взаимодействии этих электромагнитных полей начинается вращение вала двигателя.
У этой конструкции движение ротора возможно только после того, как возникло вращающееся электромагнитное поле в статоре и оно продолжается в несинхронном режиме работы с ним.
Асинхронные двигатели проще в конструктивном исполнении. Поэтому они дешевле и массово применяются в промышленных установках и бытовой домашней технике.
Линейные электродвигатели
Многие рабочие органы промышленных механизмов выполняют возвратно-поступательное или поступательное движение в одной плоскости, необходимое для работы металлообрабатывающих станков, транспортных средств, ударов молота при забивании свай …
Перемещение такого рабочего органа с помощью редукторов, шариковинтовых, ременных передач и подобных механических устройств от вращательного электродвигателя усложняет конструкцию. Современное техническое решение этой проблемы – работа линейного электрического двигателя.
У него статор и ротор вытянуты в виде полос, а не свернуты кольцами, как у вращательных электродвигателей.
Принцип работы заключается в придании возвратно-поступательного линейного перемещения бегуну-ротору за счет передачи электромагнитной энергии от неподвижного статора с незамкнутым магнитопроводом определенной длины. Внутри него поочередным включением тока создается бегущее магнитное поле.
Оно воздействует на обмотку якоря с коллектором. Возникающие в таком двигателе силы перемещают ротор только в линейном направлении по направляющим элементам.
Линейные двигатели конструируются для работы на постоянном или переменном токе, могут работать в синхронном либо асинхронном режиме.
Недостатками линейных двигателей являются:
сложность технологии;
высокая стоимость;
низкие энергетические показатели.
Электродвигатель – это электротехническое устройство для преобразования электрической энергии в механическую. Сегодня повсеместно применяются электромоторы в промышленности для привода различных станков и механизмов. В домашнем хозяйстве они установлены в стиральной машине, холодильнике, соковыжималке, кухонном комбайне, вентиляторах, электробритвах и т. п. Электродвигатели приводят в движение, подключенные к ней устройства и механизмы.
В этой статье Я расскажу о самых распространенных видах и принципах работы электрических двигателей переменного тока, широко используемых в гараже, в домашнем хозяйстве или мастерской.
Как работает электродвигатель
Двигатель работает на основе эффекта , обнаруженного Майклом Фарадеем еще в 1821 году. Он сделал открытие, что при взаимодействии электрического тока в проводнике и магнита может возникнуть непрерывное вращение.
Если в однородном магнитном поле расположить в вертикальном положении рамку и пропустить по ней ток, тогда вокруг проводника возникнет электромагнитное поле, которое будет взаимодействовать с полюсами магнитов. От одного рамка будет отталкиваться, а к другому притягиваться.
В результате рамка повернется в горизонтальное положения, в котором будет нулевым воздействие магнитного поля на проводник. Для того что бы вращение продолжилось необходимо добавить еще одну рамку под углом или изменить направление тока в рамке в подходящий момент.
На рисунке это делается при помощи двух полуколец, к которым примыкают контактные пластины от батарейки. В результате после совершения полуоборота меняется полярность и вращение продолжается.
В современных электродвигателях вместо постоянных магнитов для создания магнитного поля используются катушки индуктивности или электромагниты. Если разобрать любой мотор, то Вы увидите намотанные витки проволоки, покрытой изоляционным лаком. Эти витки и есть электромагнит или как их еще называют обмотка возбуждения.
В быту же постоянные магниты используются в детских игрушках на батарейках.
В других же более мощных двигателях используются только электромагниты или обмотки. Вращающаяся часть с ними называется ротор, а неподвижная- статор.
Виды электродвигателей
Сегодня существуют довольно много электродвигателей разных конструкций и типов. Их можно разделить по типу электропитания :
- Переменного тока , работающие напрямую от электросети.
- Постоянного тока , которые работают от батареек, АКБ, блоков питания или других источников постоянного тока .
По принципу работы:
- Синхронные , в которых есть обмотки на роторе и щеточный механизм для подачи на них электрического тока.
- Асинхронные , самый простой и распространенный вид мотора. В них нет щеток и обмоток на роторе.
Синхронный мотор вращается синхронно с магнитным полем, которое его вращает, а у асинхронного ротор вращается медленнее вращающегося магнитного поля в статоре.
Принцип работы и устройство асинхронного электродвигателя
В корпусе асинхронного двигателя укладываются обмотки статора (для 380 Вольт их будет 3), которые создают вращающееся магнитное поле. Концы их для подключения выводятся на специальную клеммную колодку. Охлаждаются обмотки, благодаря вентилятору, установленному на вале в торце электродвигателя.
Ротор , являющиеся одним целым с валом, изготавливается из металлических стержней, которые замыкаются между собой с обоих сторон, поэтому он и называется короткозамкнутым.
Благодаря такой конструкции отпадает необходимость в частом периодическом обслуживании и замене токоподающих щеток, многократно увеличивается надежность, долговечность и безотказность.
Как правило, основной причиной поломки асинхронного мотора является износ подшипников, в которых вращается вал.
Принцип работы. Для того что бы работал асинхронный двигатель необходимо, что бы ротор вращался медленнее электромагнитного поля статора, в результате чего наводится ЭДС (возникает электроток) в роторе. Здесь важное условие, если бы ротор вращался с такой же скоростью как и магнитное поле, то в нем по закону электромагнитной индукции не наводилось бы ЭДС и, следовательно не было бы вращения. Но в реальности, из-за трения подшипников или нагрузки на вал, ротор всегда будет вращаться медленнее.
Магнитные полюса постоянно вращаются в обмотках мотора, и постоянно меняется направление тока в роторе. В один момент времени, например направление токов в обмотках статора и ротора изображено схематично в виде крестиков (ток течет от нас) и точек (ток на нас). Вращающееся магнитное поле изображено изображено пунктиром.
Например, как работает циркулярная пила . Наибольшие обороты у нее без нагрузки. Но как только мы начинаем резать доску, скорость вращения уменьшается и одновременно с этим ротор начинает медленнее вращаться относительно электромагнитного поля и в нем по законам электротехники начинает наводится еще большей величины ЭДС. Вырастает потребляемый ток мотором и он начинает работать на полной мощности. Если же нагрузка на вал будет столь велика, что его застопорит, то может возникнуть повреждение короткозамкнутого ротора из-за максимальной величины наводимой в нем ЭДС. Вот почему важно подбирать двигатель, подходящей мощности. Если же взять большей, то неоправданными будут энергозатраты.
Скорость вращения ротора зависит от количества полюсов. При 2 полюсах скорость вращения будет равна скорости вращения магнитного поля, равного максимум 3000 оборотов в секунду при частоте сети 50 Гц. Что бы понизить скорость вдвое, необходимо увеличить количество полюсов в статоре до четырех.
Весомым недостатком асинхронных двигателей является то, что они подаются регулировке скорости вращения вала только при помощи изменения частоты электрического тока. А так не возможно добиться постоянной частоты вращения вала.
Принцип работы и устройство синхронного электродвигателя переменного тока
Данный вид электродвигателя используется в быту там, где необходима постоянная скорость вращения, возможность ее регулировки, а так же если необходима скорость вращения более 3000 оборотов в минуту (это максимум для асинхронных).
Синхронные моторы устанавливаются в электроинструменте, пылесосе, стиральной машине и т. д.
В корпусе синхронного двигателя переменного тока расположены обмотки (3 на рисунке), которые также намотаны и на ротор или якорь (1). Их выводы припаяны к секторам токосъемного кольца или коллектора (5), на которые при помощи графитовых щеток (4) подается напряжение. При чем выводы расположены так, что щетки всегда подают напряжение только на одну пару.
Наиболее частыми поломками коллекторных двигателей является:
- Износ щеток или их плохой их контакт из-за ослабления прижимной пружины.
- Загрязнение коллектора. Чистите либо спиртом или нулевой наждачной бумагой.
- Износ подшипников.
Принцип работы. Вращающий момент в электромоторе создается в результате взаимодействия между током тока якоря и магнитным потоком в обмотке возбуждения. С изменением направления переменного тока будет меняться и направление магнитного потока одновременно в корпусе и якоре, благодаря чему вращение всегда будет в одну сторону.
тока»Место урока в рабочей программе: 55 урок, один из уроков темы «Электромагнитные явления».
Цель урока: Объяснить устройство и принцип действия электрического двигателя.
Задачи:
изучить электрический двигатель, с использованием практического метода – выполнения лабораторной работы.
научиться применять полученные знания в нестандартных ситуациях для решения задач;
для развития мышления учащихся продолжить отработку умственных операций анализа, сравнения и синтеза.
продолжить формирование познавательного интереса учащихся.
Методическая цель: применение здоровьесберегающих технологий на уроках физики.
Формы работы и виды деятельности на уроке: проверка знаний с учётом индивидуальных особенностей учащихся; лабораторная работа проводится в микрогруппах(парами), актуализация знаний учащихся в игровой форме; объяснение нового материала в форме беседы с демонстрационным экспериментом, целеполагание и рефлексия.
Ход урока
1)Проверка домашнего задания.
Самостоятельная работа (разноуровневая) проводится в течение первых 7 минут урока.
1 уровень .
2 уровень.
3 уровень.
2). Изучение нового материала. (15 минут).
Учитель сообщает тему урока, учащиеся формируют цель.
Актуализация знаний. Игра «да» и «нет»
Учитель читает фразу, если ученики согласны с утверждением они встают, если нет – сидят.
Магнитное поле образуется постоянными магнитами или электрическим током.
Магнитных зарядов в природе нет.
Южный полюс магнитной стрелки указывает южный географический полюс Земли.
Электромагнитом называется катушка с железным сердечником внутри.
Силовые линии магнитного поля направлены слева направо.
Линии, вдоль которых в магнитном поле устанавливаются магнитные стрелки называются магнитными линиями.
План изложения.
Действие магнитного поля на проводник с током.
Зависимость направления движения проводника от направления тока в нём и от расположения полюсов магнита.
Устройство и действие простейшего коллекторного электродвигателя.
Движение проводника и рамки с током в магнитном поле.
Устройство и принцип действия электродвигателя постоянного тока.
Инструктаж по технике безопасности.
Работа выполняется по описанию в учебнике стр.176.
4.Заключительный этап урока.
Задача. Два электронных пучка отталкиваются, а два параллельных провода, по которым течёт ток в одном направлении притягиваются. Почему? Можно ли создать условия, при которых эти проводники тоже будут отталкиваться?
Рефлексия.
Что нового узнали? Нужны ли эти знания в повседневной жизни?
Вопросы:
От чего зависит скорость вращения ротора в электродвигателе?
Что называется электрическим двигателем?
П. 61, составить кроссворд по теме «электромагнитные явления.
Приложение.
1 уровень .
1.Как взаимодействуют разноимённые и одноимённые полюсы магнитов?
2. Можно ли разрезать магнит так, чтобы один из полученных магнитов имел только северный полюс, а другой – только южный?
2 уровень.
Почему корпус компаса делают из меди, алюминия, пластмассы и других материалов, но не из железа?
Почему стальные рельсы и полосы, лежащие на складе, через некоторое время оказываются намагниченными?
3 уровень.
1.Нарисуйте магнитное поле подковообразного магнита и укажите направление силовых линий.
2. К южному полюсу магнита притянулись две булавки. Почему их свободные концы отталкиваются?
1 уровень .
1.Как взаимодействуют разноимённые и одноимённые полюсы магнитов?
2. Можно ли разрезать магнит так, чтобы один из полученных магнитов имел только северный полюс, а другой – только южный?
2 уровень.
Почему корпус компаса делают из меди, алюминия, пластмассы и других материалов, но не из железа?
Почему стальные рельсы и полосы, лежащие на складе, через некоторое время оказываются намагниченными?
3 уровень.
1.Нарисуйте магнитное поле подковообразного магнита и укажите направление силовых линий.
2. К южному полюсу магнита притянулись две булавки. Почему их свободные концы отталкиваются?
МКОУ «Аллакская СОШ»
Открытый урок физики в 8 классе по теме « Действие магнитного поля на проводник с током. Электрический двигатель. Лабораторная работа № 9 «Изучение электрического двигателя постоянного тока».
Подготовила и провела: учитель первой категории Таранушенко Елизавета Александровна.
Чтобы пользоваться предварительным просмотром презентаций создайте себе аккаунт (учетную запись) Google и войдите в него: https://accounts.google.com
Подписи к слайдам:
На рисунках определите направление силы Ампера, направления тока в проводнике, направления линий магнитного поля, полюса магнита. N S F = 0 Вспомним.
Лабораторная работа № 11 Изучение электрического двигателя постоянного тока (на модели). Цель работы: познакомиться на модели электродвигателя постоянного тока с его устройством и работой. Приборы и материалы: модель электродвигателя, лабораторный источник питания, ключ, соединительные провода.
Правила техники безопасности. На столе не должно быть никаких посторонних предметов. Внимание! Электрический ток! Изоляция проводников должна быть не нарушена. Не включайте цепь без разрешения учителя. Не прикасайтесь руками к вращающимся деталям электродвигателя. Длинные волосы необходимо убрать так, чтобы они не попали во вращающиеся части двигателя. После выполнения работы рабочее место привести в порядок, цепь разомкнуть и разобрать.
Порядок выполнения работы. 1.Рассмотрите модель электродвигателя. Укажите на рисунке 1 основные его части. 1 2 3 Рис.1 4 5 1 – ______________________________ 2 – ______________________________ 3 – ______________________________ 4 – ______________________________ 5 – ______________________________
2.Соберите электрическую цепь, состоящую из источника тока, модели электродвигателя, ключа,соединив все последовательно. Начертите схему цепи.
3. Приведите двигатель во вращение. Если двигатель не работает, найдите причины и устраните их. 4. Измените направление тока в цепи. Наблюдайте за вращением подвижной части электродвигателя. 5.Сделайте вывод.
Литература: 1 . Физика. 8 кл.:учеб. для общеобразоват. учреждений/А.В.Перышкин.-4-е изд., доработ.-М.:Дрофа, 2008. 2 . Физика. 8 кл.:учеб. Для общеобразоват. учреждений/ Н.С.Пурышева, Н.Е.Важеевская.-2-е изд., стереотип.-М.:Дрофа, 2008 . 3 . Лабораторные работы и контрольные задания по физике: Тетрадь для учащихся 8-го класса.-Саратов: Лицей, 2009. 4 .Тетрадь для лабораторных работ. Сарахман И.Д. МОУ СОШ №8 г.Моздока РСО-Алания. 5 .Лабораторные работы в школе и дома: механика/ В.Ф.Шилов.-М.:Просвещение, 2007. 6 .Сборник задач по физике. 7-9 классы: пособие для учащихся общеобразоват. учреждений/ В.И.Лукашик, Е.В. Иванова.-24-е изд.-М.:Просвещение, 2010.
Предварительный просмотр:
Лабораторная работа № 11
(на модели)
Цель работы
Приборы и материалы
Ход работы.
Лабораторная работа № 11
Изучение электрического двигателя постоянного тока
(на модели)
Цель работы : познакомиться на модели электродвигателя постоянного тока с его устройством и работой.
Приборы и материалы : модель электродвигателя, лабораторный источник питания, ключ, соединительные провода.
Правила техники безопасности.
На столе не должно быть никаких посторонних предметов. Внимание! Электрический ток! Изоляция проводников должна быть не нарушена. Не включайте цепь без разрешения учителя. Не прикасайтесь руками к вращающимся деталям электродвигателя.
Тренировочные задания и вопросы
1.На каком физическом явлении основано действие электрического двигателя?
2.Каковы преимущества электрических двигателей по сравнению с тепловыми?
3. Где используется электрические двигатели постоянного тока?
Ход работы.
1.Рассмотрите модель электродвигателя. Укажите на рисунке 1 основные его части.
2.Соберите электрическую цепь, состоящую из источника тока, модели электродвигателя, ключа,соединив все последовательно. Начертите схему цепи.
Рис.1
Сделайте вывод.
3. Приведите двигатель во вращение. Если двигатель не работает, найдите причины и устраните их.
4. Измените направление тока в цепи. Наблюдайте за вращением подвижной части электродвигателя.
Рис.1
Схема включения двигателя постоянного тока в сеть 110 и 220вольт
Часто в условиях домашней мастерской, оснащенной различным оборудованием и механизмами, возникает необходимость подключения к сети двигателя постоянного тока.
Самой востребованной и популярной выступает схема с использованием пускового реостата. Этот элемент отвечает за понижение показателей пускового тока, возникающего при включении двигателя. Пусковой ток нуждается в корректировке, так как превышает номинальный показатель в 10-20р. Двигатель постоянного тока, а точнее обмотка может не справиться с такой нагрузкой.
На схеме ниже представлено подключение пускового реостата по последовательной схеме с цепью якоря.
Расшифровка обозначений:
- Л – соединенный с сетью зажим;
- М – соединенный с цепью возбуждения зажим-фиксатор;
- Я – соединенный с якорем зажим;
- 1 – дуга, 2 – рычаг, 3 – контакт рабочий.
Включение и управление двигателем постоянного тока важно выполнять, принимая во внимание информацию, приведенную на самом агрегате или в инструкции (если таковая еще сохранилась).
Представленная схема двигателя постоянного тока оптимальна для агрегатов, мощность которых превышает 0,5кВт. Чтобы рассчитать пусковое сопротивление реостата, воспользуйтесь формулой:
Расшифровка обозначений: Rn – пусковое сопротивление реостата, U – напряжение сети (100 или 220), Iном – номинальное значение тока электрического двигателя, Rя – показатели сопротивления обмотки якоря.
Порядок и схема включения двигателя постоянного тока
- Установите рычаг на реостате в положение «0» – холостой контакт;
- После включения сетевого рубильника необходимо перевести этот рычаг в положение первого промежуточного контакта. Подключаемый двигатель постоянного тока перейдет в стадию возбуждения. По якорной цепи потечет ток, показатель которого зависит от величины сопротивления, включающего все 4 секции пускового реостата;
- Посредством увеличения частоты вращения якоря пусковой ток снижается. В результате уменьшается и сопротивление, возникшее при пуске. Для выполнения задачи рычаг реостата постепенно проводят по контактам до тех пор, пока он не займет рабочего контакта. НЕ задерживайтесь на промежуточных контактах, на такие нагрузки пусковые реостаты не рассчитаны.
Схема двигателя постоянного тока предполагает и определенную последовательность действий для его отключения.
Двигатель постоянного тока отключается не сразу. После перевода рукояти реостата в крайнее левое положение агрегат отключится, но обмотка останется замкнутой. Только после этого питание двигателя можно выключать.
Если игнорировать приведенный выше порядок действий, при размыкании цепи велик риск возникновения напряжения такой силы, которая выведет электрический двигатель из строя.
Включение двигателя постоянного тока для промышленных применений может отличаться.
MCU 101: Как работает двигатель постоянного тока?
Двигатель постоянного тока – это машина, которая преобразует электрическую энергию в механическую энергию в форме вращения. Его движение вызвано физическим поведением электромагнетизма. Двигатели постоянного тока имеют внутри индукторы, которые создают магнитное поле, используемое для движения. Но как это магнитное поле изменяется, если используется постоянный ток?
Электромагнит, представляющий собой кусок железа, обернутый проволочной катушкой, к клеммам которой приложено напряжение.Если добавить два фиксированных магнита с обеих сторон этого электромагнита, силы отталкивания и притяжения создадут крутящий момент.
Затем необходимо решить две проблемы: подать ток на вращающийся электромагнит без скручивания проводов и изменить направление тока в нужное время. Обе эти проблемы решаются с помощью двух устройств: коммутатора с разъемным кольцом и пары щеток.
Как видно, коммутатор имеет два сегмента, которые подключены к каждой клемме электромагнита, кроме того, две стрелки – это щетки, которые подают электрический ток на вращающийся электромагнит.В реальных двигателях постоянного тока вместо двух и двух щеток можно встретить три паза.
Таким образом, когда электромагнит движется, его полярность меняется, и вал может продолжать вращаться. Даже если это просто и звучит так, что он будет отлично работать, есть некоторые проблемы, которые делают эти двигатели неэффективными и механически нестабильными, но основная проблема связана с синхронизацией между каждой инверсией полярности.
Поскольку полярность электромагнита изменяется механически, на некоторых скоростях полярность меняется слишком быстро, что приводит к обратным импульсам, а иногда и к слишком позднему изменению, вызывая мгновенные «остановки» вращения.В любом случае эти проблемы вызывают пики тока и механическую нестабильность.
Двигатели постоянного тока имеют только две клеммы. Если вы подадите напряжение на эти клеммы, двигатель будет работать, если вы измените положение клемм, двигатель изменит свое направление. Если двигатель работает, и вы внезапно отключите обе клеммы, двигатель будет продолжать вращаться, но замедляться до остановки. Наконец, если двигатель работает, и вы внезапно закорачиваете обе клеммы, двигатель остановится.
Таким образом, не существует третьего провода для управления двигателем постоянного тока, но, зная предыдущее поведение, можно разработать способ управления им, и решением является H-мост.
Посмотрите на последнюю эволюцию двигателя постоянного тока выше, вы можете заметить, что между ними есть четыре затвора и двигатель. Это простейший H-мост, в котором четыре затвора представляют собой транзисторы. Управляя этими воротами и подключая верхнюю и нижнюю клеммы к источнику напряжения, вы можете управлять двигателем во всех режимах, как показано ниже.
Когда мотор и камера линейного сканирования подключены к одной плате, возникает серьезная проблема с шумом.
Чем выше вы поворачиваете ШИМ на приводных двигателях, тем хуже появляются данные с камеры. ЧТОБЫ значительно снизить этот шум, вы можете просто припаять индуктор непосредственно к двум приводным двигателям. Это позволит вам увеличить скорость автомобиля без значительного влияния на данные, которые вы получаете обратно с камеры.
Все о серийных двигателях постоянного тока – что это такое и как они работают
Кажется, невозможно представить мир без электродвигателя.
Все, что используется в повседневной жизни, – машина, бытовая техника, даже розетки, обеспечивающие постоянное электричество, – не было бы здесь, если бы не эти очень полезные машины. Благодаря достижениям 19-го века и более поздних времен мы можем преобразовывать электрический ток в полезный механический механизм для выполнения всех видов удивительных задач. В этой статье речь пойдет о двигателе постоянного тока, одной из старейших форм электродвигателей, и о том, какую пользу он приносит нам по сей день. Мы специально исследуем двигатель постоянного тока с последовательной обмоткой (часто называемый «последовательным двигателем постоянного тока»), который почти во всех аспектах похож на другие типы двигателей постоянного тока, но имеет некоторые важные уникальные свойства.Эта статья призвана помочь читателям понять, как работает двигатель постоянного тока с серийной обмоткой, как он работает и для каких областей применения выгодна эта прочная конструкция электродвигателя.
Что такое двигатели постоянного тока с последовательной обмоткой и как они работают?
В большинстве случаев серийные двигатели постоянного тока идентичны другим типам щеточных двигателей постоянного тока по конструкции и работе. Он состоит из двух жизненно важных компонентов, статора и ротора, которые электрически и магнитно взаимодействуют, создавая вращательное движение на выходном валу.Базовая конструкция двигателей постоянного тока относительно проста, а упрощенная принципиальная схема показана на рисунке 1:
.Рисунок 1: Принципиальная электрическая схема двигателей постоянного тока. Эта диаграмма намеренно нечеткая относительно того, где находится поле статора относительно якоря; его расположение и источник питания – главное отличие некоторых двигателей постоянного тока.
Как показано, поле статора действует на весь узел ротора, создавая постоянное магнитное поле; это поле может быть создано с помощью постоянного магнита или электромагнита, сделанного из проволочной обмотки (известной как «обмотка возбуждения», как показано на рисунке 1).Источник питания постоянного тока подключен к щеткам, которые зажимают ротор, который представляет собой вращающийся узел, содержащий якорь, обмотки якоря, коллекторные кольца и выходной вал. Якорь состоит из металлических пластин, в которых размещена обмотка якоря, которая находится вокруг выходного вала. Это непрерывная катушка проводящего провода, которая пропущена через пластинки якоря и оканчивается кольцами коммутатора.
Якорь, когда приводится в действие зажимом щеток на кольцах коммутатора, действует как электромагнит и создает собственное магнитное поле так же, как и обмотка возбуждения.Когда оператор включает источник постоянного тока, ток проходит через щетки, через кольца коммутатора и в катушки якоря, где поле якоря начинает противодействовать постоянному магнитному полю статора. Затем ротор магнитно «отталкивается» от поля статора, но, поскольку он может вращаться только на месте, он вызывает полезную механическую мощность на выходном валу.
Зная эту информацию об общей работе двигателя постоянного тока, на рисунке 2 теперь показано конкретное расположение двигателей постоянного тока серии:
Рис. 2: Упрощенная принципиальная схема для двигателей постоянного тока с последовательной обмоткой.Обратите внимание, как обмотка возбуждения последовательно подключена к ротору.
Изучая рисунок 2, становится ясно, почему эти двигатели известны как двигатели постоянного тока с «последовательной обмоткой»; их обмотка возбуждения питается от источника постоянного тока и соединена последовательно с обмоткой якоря. Это означает, что тот же ток, который питает обмотки якоря, также питает обмотки возбуждения. Чтобы сделать это эффективно, обмотка возбуждения намотана всего несколькими витками провода большого сечения, так что она может выдерживать полный ток якоря, а также ток статора и обеспечивать минимально возможное сопротивление.Это противоположно шунтирующим двигателям постоянного тока, которые соединяют свои обмотки возбуждения параллельно с якорем, что дает разные эффекты (полное объяснение можно найти в нашей статье о шунтирующих двигателях постоянного тока). Если поменять местами выводы обмоток возбуждения или обмотки ротора, это может привести к тому, что двигатель изменит направление вращения, и эти двигатели станут реверсивными. Кроме того, с некоторыми незначительными модификациями эти двигатели могут работать от переменного тока и известны как универсальные щеточные двигатели.
Технические характеристики электродвигателей постоянного тока серииСуществует несколько основных характеристик, которые могут помочь разработчикам выбрать правильную модель двигателя постоянного тока, и в этой статье мы кратко рассмотрим некоторые из них.Обратите внимание, что двигатели серии постоянного тока имеют больше спецификаций, чем описано в этом разделе, и в нем описаны только основные значения, которые должны быть известны в большинстве случаев.
Номинальное напряжение
Номинальное напряжение описывает источник постоянного тока, необходимый для работы двигателя. Это минимальное значение, которое следует использовать, но допускается и немного большее значение. Обратите внимание, что использование более высокого напряжения может вызвать повреждение / выгорание двигателя из-за большого тока в обмотке возбуждения, поэтому следует соблюдать осторожность при превышении номинального напряжения.
Срок службы кисти
Эти двигатели используют механическую коммутацию для подключения источника питания к обмоткам якоря; в результате угольные щетки, которые являются точками соединения для этой коммутации, со временем изнашиваются, и их необходимо периодически заменять. Большинство двигателей постоянного тока обеспечивают срок службы используемых щеток (обычно в часах), и важно отслеживать, как долго щетки использовались, чтобы предотвратить повреждение.
Непрерывная и пиковая мощность
Мощность последовательного двигателя постоянного тока, номинальная мощность в л.с. или кВт, – это выходная энергия, обеспечиваемая двигателем.Для серийного двигателя постоянного тока, когда он работает в непрерывном режиме, должна быть указана его непрерывная мощность, так как пиковая мощность должна использоваться только в течение коротких периодов времени, например, при пуске.
Диапазон скоростей
Двигатели постоянного тока серии, когда их выходной вал не нагружен, будут продолжать ускоряться до тех пор, пока они не разрушатся. Это является следствием последовательного подключения обмотки возбуждения к якорю и является наиболее серьезным недостатком этих двигателей. По этой причине ни при каких обстоятельствах эти двигатели не должны работать без нагрузки, и они всегда должны быть нагружены.В большинстве листов спецификаций указывается безопасный / максимальный диапазон оборотов, при которых эти двигатели не ломаются, и их следует тщательно учитывать при выборе модели двигателя.
Заявки и критерии выбора
Из-за больших катушек в обмотках эти двигатели обеспечивают большой пусковой крутящий момент на низкой скорости. Обычно они предназначены для создания максимально возможного пускового момента и часто используются в качестве стартеров для других двигателей или в других промышленных приложениях.Как указывалось ранее, их управление скоростью довольно плохое, а управление скоростью возможно только с помощью частотно-регулируемых приводов (ЧРП); однако, как правило, не рекомендуется использовать последовательный двигатель постоянного тока, если управление скоростью важно для конструкции, поскольку другие электродвигатели были разработаны для достижения этой цели без дополнительных недостатков, таких как синхронные двигатели, асинхронные двигатели и шаговые двигатели (подробнее информацию о синхронных двигателях, асинхронных двигателях и шаговых двигателях можно найти в наших статьях).
Это не означает, что двигатели постоянного тока с последовательной обмоткой обязательно менее полезны, чем электродвигатели других конструкций. Их нелинейная скорость и увеличенный пусковой крутящий момент наиболее эффективно использовались с большими нагрузками, такими как краны, лебедки и другие машины, которые должны перемещать тяжелые грузы медленно, а более легкие – быстрее. Его конструкция с регулируемой скоростью позволяет использовать его для пылесосов, швейных машин, электроинструментов, тяговых устройств, лифтов и многого другого. Это рабочая лошадка современной промышленности и отличная машина, если ее использовать в правильных условиях.
Сводка
В этой статье представлено понимание того, что такое двигатели постоянного тока с последовательной обмоткой и как они работают. Для получения дополнительной информации о сопутствующих продуктах обратитесь к другим нашим руководствам или посетите платформу Thomas Supplier Discovery Platform, чтобы найти потенциальные источники поставок или просмотреть подробную информацию о конкретных продуктах.
Источники:
- https://itp.nyu.edu/physcomp/lessons/dc-motors/dc-motors-the-basics/
- http://www.ece.uah.edu/courses/material/EE410-Wms2/Electric%20motors.pdf
- http://www2.mae.ufl.edu/designlab/Class%20Projects/Background%20Information/Electric%20DC%20motors.htm
- http://fab.cba.mit.edu
- https://electrical-engineering-portal.com/4-types-of-dc-motors-and-their-characteristics
- https://www.engineersedge.com
- https://www.monolithicpower.com
Прочие изделия для двигателей
Больше от Machinery, Tools & Supplies
Знакомство с бесщеточными двигателями постоянного тока
Бесщеточные двигатели постоянного тока широко используются в промышленности по всему миру.На самом базовом уровне существуют щеточные и бесщеточные двигатели, а также двигатели постоянного и переменного тока. Бесщеточные двигатели постоянного тока, как вы понимаете, не содержат щеток и используют постоянный ток.
Эти двигатели обладают многими конкретными преимуществами по сравнению с другими типами электродвигателей, но, выходя за рамки основ, что именно представляет собой бесщеточный двигатель постоянного тока? Как это работает и для чего используется?
Как работает бесщеточный двигатель постоянного тока
Часто помогает сначала объяснить, как работает щеточный двигатель постоянного тока, поскольку он использовался некоторое время до того, как стали доступны бесщеточные двигатели постоянного тока.Щеточный двигатель постоянного тока имеет постоянные магниты на внешней стороне своей конструкции с вращающимся якорем внутри. Постоянные магниты, которые неподвижны снаружи, называются статором. Якорь, который вращается и содержит электромагнит, называется ротором.
В щеточном двигателе постоянного тока ротор вращается на 180 градусов, когда электрический ток проходит через якорь. Чтобы продолжить, полюса электромагнита должны перевернуться. Щетки, когда ротор вращается, контактируют со статором, меняя магнитное поле и позволяя ротору вращаться на полные 360 градусов.
Бесщеточный двигатель постоянного тока по существу перевернут наизнанку, что устраняет необходимость в щетках для изменения электромагнитного поля. В бесщеточных двигателях постоянного тока постоянные магниты находятся на роторе, а электромагниты – на статоре. Затем компьютер заряжает электромагниты в статоре, чтобы вращать ротор на полные 360 градусов.
Для чего используются бесщеточные двигатели постоянного тока?
Бесщеточные двигатели постоянного тока обычно имеют КПД 85-90%, в то время как щеточные двигатели обычно имеют КПД только 75-80%.Щетки со временем изнашиваются, иногда вызывая опасное искрение, ограничивая срок службы двигателя с щеткой. Бесщеточные двигатели постоянного тока тихие, легкие и имеют гораздо более длительный срок службы. Поскольку компьютеры управляют электрическим током, бесщеточные двигатели постоянного тока могут обеспечить гораздо более точное управление движением.
Из-за всех этих преимуществ бесщеточные двигатели постоянного тока часто используются в современных устройствах, где требуется низкий уровень шума и тепла, особенно в устройствах, которые работают в непрерывном режиме. Это могут быть стиральные машины, кондиционеры и другая бытовая электроника.Они могут даже быть основным источником энергии для сервисных роботов, что потребует очень тщательного контроля силы из соображений безопасности.
Бесщеточные двигатели постоянного токаобладают рядом явных преимуществ по сравнению с другими типами электродвигателей, поэтому они нашли применение во многих предметах домашнего обихода и могут стать основным фактором роста сервисных роботов внутри и за пределами промышленного сектора.
Если вы считаете, что ваше приложение может извлечь выгоду из этой технологии, просмотрите список поставщиков и интеграторов бесщеточных двигателей постоянного тока.
Принципы работы двигателя постоянного тока: преимущества и недостатки двигателей постоянного тока
Мы уже рассмотрели тему двигателей постоянного тока в отдельной статье, и на Linquip есть много статей о его различных типах, все из которых вы можете получить с помощью простого поиск. Но в этой статье мы специально собираемся обсудить, как это работает, и подробно остановимся на правилах, по которым сконструирован этот тип двигателя. Чтобы лучше понять принципы работы двигателей постоянного тока, мы предоставили информацию о целях создания и использования этих двигателей и их типах, а также об их преимуществах и недостатках, с которыми мы можем столкнуться.
Linquip собрал всю доступную информацию по этой теме, чтобы избавить вас от необходимости читать разрозненный контент. Оставайся с нами до конца. Для начала давайте посмотрим, что такое двигатель постоянного тока и что он для нас делает.
Что такое двигатель постоянного тока?
В этом разделе и прежде чем мы перейдем к основному предмету принципов работы двигателя постоянного тока, важно знать, что делает двигатель постоянного тока и какие части задействованы для работы такого устройства, как двигатели постоянного тока.
Двигатель постоянного тока – один из первых электродвигателей, предназначенных для преобразования электрической энергии постоянного тока в механическую.Это одно из величайших устройств, изобретенных людьми, и с тех пор оно произвело удивительную революцию в нашей жизни. Эта вращающаяся электрическая машина занимала разные типы, все они содержат почти одинаковые компоненты, которые взаимодействуют на основе либо механизма электронного, либо механизма электромеханического, который отвечает за изменение направления тока в двигателе.
Двигатель постоянного тока состоит из статора, якоря или ротора и коммутатора со щетками. Это основные компоненты, которые входят в состав всех двигателей постоянного тока.Если мы хотим очень кратко объяснить, как работает этот тип двигателя, мы должны сказать, что противоположная полярность между двумя магнитными полями двигателя заставляет его вращаться. Эти двигатели могут быть самыми простыми двигателями, доступными с точки зрения конструкции и производительности, но они имеют широкий спектр применения, включая те, которые используются в бытовых приборах, таких как электрические бритвы, и те, которые используются в различных отраслях промышленности.
Краткое описание различных типов двигателей постоянного тока
В предыдущем разделе мы обсудили, что делает двигатель постоянного тока и для каких целей он был изобретен.Позже мы кратко упомянули, как это работает в целом. Как мы отмечали ранее, у этого типа двигателей есть несколько подкатегорий, наиболее распространенными из которых являются последовательные, шунтирующие, постоянные магниты, бесщеточные и составные двигатели постоянного тока. Поскольку мы рассмотрели каждый из этих типов двигателей постоянного тока в отдельных статьях. Ниже мы кратко упомянем их на память.
Двигатели с постоянным магнитом, также известные как двигатели с постоянным магнитом, являются одними из двигателей постоянного тока, в которых постоянный магнит используется для создания магнитного поля.Этот тип двигателей постоянного тока обладает отличным пусковым моментом с хорошей регулировкой скорости. Имея ограниченный крутящий момент, обычно в устройствах с малой мощностью используются двигатели с постоянными магнитами.
поле параллельных двигателей подключено параллельно обмоткам якоря. Этот тип двигателей обеспечивает прекрасное регулирование скорости благодаря тому, что шунтирующее поле может возбуждаться отдельно от обмоток якоря. Кроме того, параллельные двигатели также обеспечивают упрощенное управление реверсированием.
Серийный двигатель состоит из полевой обмотки с несколькими витками провода, по которому проходит ток якоря.Как и двигатели постоянного тока, серийные двигатели обладают большим пусковым моментом. Но в отличие от двигателей постоянного тока, серийные двигатели не могут регулировать скорость. Кроме того, если серийные двигатели работают без нагрузки, это может быть очень опасно. Эти ограничения делают серийные двигатели непригодными для применения в приводах с регулируемой скоростью.
Составные двигатели имеют шунтирующее поле, которое возбуждается отдельно, как и шунтирующие двигатели постоянного тока. Составные двигатели постоянного тока похожи на постоянные и серийные двигатели с точки зрения обеспечения хорошего пускового момента, но у них есть некоторые проблемы с регулированием скорости в приводах с регулируемой скоростью.
Разработка принципа работы двигателей постоянного тока
Теперь, когда мы привыкли к назначению и наиболее часто используемым типам двигателей постоянного тока, будет легче понять, на какой основе и в соответствии с какими правилами и положениями работают эти двигатели.
Двигатели постоянного тока работают по принципу электромагнетизма, который впервые ввел Фарадей. Принцип электромагнетизма Фарадея гласит, что проводник с током сталкивается с силой, когда его помещают в магнитное поле.С другой стороны, согласно правилу левой руки Флеминга, проводник всегда движется в направлении, перпендикулярном току и магнитному полю.
Как мы упоминали ранее, для лучшего понимания работы двигателя постоянного тока необходимо, чтобы мы знали все детали конструкции. Якорь – это вращающаяся часть, которая расположена между северным и южным полюсами постоянного или электромагнита, а статор – их неподвижная часть, магнитные поля которой взаимодействуют с магнитным полем ротора или якоря.
Катушка якоря, состоящая из коммутатора и щеток, подключена к источнику постоянного тока. Коммутатор превращает переменный ток, индуцированный в якоре, в постоянный ток, и щетки перемещают этот ток от вращающейся части двигателя к неподвижной внешней нагрузке.
Как работает двигатель постоянного тока?
В предыдущем разделе мы обнаружили, что двигатели постоянного тока работают на основе принципа электромагнетизма Фарадея и правила левой руки Флеминга. В этом разделе мы покажем вам, как именно работает двигатель постоянного тока и как его компоненты взаимодействуют для запуска этого устройства.
Статор двигателя постоянного тока имеет неподвижный набор магнитов и катушку с проводом, через которую проходит ток, чтобы создать электромагнитное поле, выровненное по центру катушки. Чтобы сконцентрировать магнитное поле. Одна или несколько обмоток изолированного провода намотаны вокруг сердечника двигателя.
Обмотки изолированного провода подключены к поворотному электрическому переключателю, который называется коммутатором, подающим электрический ток на обмотки. Коммутатор позволяет по очереди возбуждать каждую катушку якоря, создавая постоянную вращающую силу.
Для создания этой устойчивой вращающей силы, называемой также крутящим моментом, катушки якоря включаются и выключаются в последовательности, в результате чего создается вращающееся магнитное поле, которое взаимодействует с различными полями неподвижных магнитов в статоре.
Это взаимодействие между вращающимся магнитным полем и полем стационарных магнитов в статоре в конечном итоге заставляет его вращаться. Эти ключевые принципы работы двигателей постоянного тока позволяют им преобразовывать электрическую энергию из постоянного тока в механическую энергию посредством вращательного движения, которое затем может использоваться для приведения в движение объектов.
Преимущества и недостатки двигателей постоянного тока
Существует широкий ассортимент двигателей постоянного тока различных размеров и размеров, подходящих для различных нужд. Маленькие можно использовать в игрушках, инструментах и бытовой технике, а более крупные используются в лифтах и подъемниках, а также в двигателях электромобилей и промышленных приборов.
Хотя двигатели переменного тока снизили объем продаж двигателей постоянного тока из-за простой генерации и передачи с меньшими потерями на большие расстояния, необходимости меньшего обслуживания и возможности эксплуатации во взрывоопасных средах, двигатели постоянного тока по-прежнему используются там, где переменного тока не могут удовлетворить потребности. .У двигателей постоянного тока есть свои уникальные особенности и важность в отраслях, которые компенсируют множество других преимуществ, которыми обладают двигатели переменного тока по сравнению с ними.
Выше мы упомянули некоторые недостатки DC по сравнению с AC. Ниже приведены некоторые из наиболее заметных преимуществ двигателей постоянного тока:
- Они подходят для низкоскоростного крутящего момента
- Они имеют регулируемую скорость
- Они предлагают широкий диапазон регулирования скорости как ниже, так и выше номинальной скорости
- Они имеют очень высокий и сильный пусковой крутящий момент
- Они используются в таких устройствах, как электропоезда и краны, которые в начальных условиях испытывают огромную нагрузку.
- Они более доступны по цене
- Их обслуживание простое и занимает мало времени
Заключение
в этой статье мы постарались дать вам основную и исчерпывающую информацию о принципах работы двигателя постоянного тока.мы говорили о конструкции и конструкции двигателей постоянного тока, о том, что они делают и для каких целей они были разработаны. Кроме того, для лучшего понимания мы привели некоторые основные сведения о различных типах двигателей постоянного тока. Затем мы подошли к разделу, в котором рассказали о принципе работы и функциональных возможностях этого типа двигателя. В конце мы перечислили для вас некоторые особенности, недостатки и недостатки этого типа двигателя и упомянули, где этот тип двигателя обычно используется.
Если у вас есть опыт использования различных типов коллекторных двигателей, мы будем очень рады услышать ваше мнение в комментариях. Кстати, если у вас есть какие-либо вопросы по этой теме и вы все еще не уверены в этом устройстве, вы можете зарегистрироваться на нашем веб-сайте и дождаться, пока наши специалисты по Linquip ответят на ваши вопросы. Надеюсь, вам понравилась эта статья.
Как сделать двигатель постоянного тока
Как построить простой электродвигатель
- Чтобы сделать пучок, несколько раз оберните концы проволоки вокруг петель, чтобы они удерживались на месте.Расположите концы так, чтобы они находились прямо напротив друг друга и выходили по прямой линии с обеих сторон пучка, чтобы образовалась ось. То, что вы только что сделали, называется арматурой .
- Удерживайте созданный вами жгут проводов так, чтобы он лежал ровно у стены, а не у стола, и раскрасьте верхнюю сторону каждого конца провода с помощью маркера. Оставьте нижнюю сторону каждого провода оголенной.
- Осторожно согните каждую скрепку, образуя небольшую петлю, обернув один конец вокруг небольшого предмета, например карандаша или ручки.При желании вместо скрепки можно использовать толстую проволоку и плоскогубцы. Будьте осторожны при использовании плоскогубцев.
- Если вы используете держатель батареи, прикрепите скрепку с обеих сторон и вставьте батарею. Если у вас нет держателя батареи, плотно оберните резинку по всей длине батареи. Вставьте скрепки так, чтобы каждая из них касалась одного из контактов, и они надежно удерживались резинкой. Прикрепите изогнутую сторону батареи к столу или другой плоской поверхности с помощью глины или липкой ленты.
- Установите один неодимовый магнит на верхнюю часть батареи в центре. Поместите арматуру в петли для скрепок так, чтобы блестящая неокрашенная сторона касалась скрепок. Убедитесь, что он не касается магнита.
- Если ваш двигатель не запускается сразу, попробуйте запустить его, покрутив жгут проводов. Поскольку двигатель вращается только в одном направлении, попробуйте вращать его в обоих направлениях.
- Если ваш двигатель по-прежнему не работает, убедитесь, что скрепки надежно прикреплены к клеммам аккумулятора.Вам также может потребоваться отрегулировать изолированный провод так, чтобы оба конца были прямыми, а жгут, который вы сделали, был аккуратным, с концами проводов прямо напротив друг друга.
- Пока двигатель вращается, удерживайте другой магнит над якорем. Что происходит, когда вы приближаете его? Переверните магнит и попробуйте еще раз, чтобы увидеть, что произойдет.
Что случилось:
Якорь – это временный магнит, получающий свою силу от электрического тока в батарее. Неодимовый магнит является постоянным, что означает, что он всегда будет иметь два полюса и не может потерять свою силу.
Эти две силы – электричество и магнетизм – работают вместе, чтобы вращать двигатель. Полюса постоянного магнита отталкивают полюса временного магнита, заставляя якорь повернуться на пол-оборота. Через пол-оборота изолированная сторона провода (часть, которую вы закрасили перманентным маркером) соприкасается со скрепками, останавливая электрический ток. Сила тяжести завершает поворот якоря до тех пор, пока голая сторона снова не соприкоснется, и процесс начнется заново.
Созданный вами двигатель использует постоянный ток или DC для вращения якоря.Магнитная сила может течь только в одном направлении, поэтому двигатель вращается только в одном направлении. Переменный или переменный ток использует тот же принцип потока электронов, но полюс вращается, а не в одном месте. Двигатели переменного тока часто бывают более сложными, чем двигатели постоянного тока, например, тот простой, который вы смогли сделать. В отличие от фиксированного двигателя постоянного тока, двигатели переменного тока могут переключать направление вращения.
(Сделанный вами двигатель постоянного тока может вращаться только в одном направлении, потому что его направление определяется полюсами постоянного магнита.Если вы перевернете магнит так, чтобы другой полюс был направлен вверх, это изменит направление вращения двигателя.)
Когда вы держите второй магнит над верхом якоря, он либо останавливается, либо заставляет двигатель вращаться быстрее. Если он остановился, это потому, что полюс находился в направлении, противоположном первому магниту, в некотором смысле компенсируя вращение якоря. Если он движется быстрее, одинаковые полюса первого и второго магнитов, которые отталкиваются друг от друга, вращают якорь быстрее, чем при использовании только одного магнита.
Строим больше, двигатели быстрее
Поэкспериментируйте с батареями более высокого напряжения, а также с более мощными магнитами. Вы также можете попробовать использовать керамические магниты. Один из вариантов, который, как мы обнаружили, работал хорошо, заключался в установке якоря на 4 керамических кольцевых магнита и подключении поддерживающих скрепок к батарее на 6 В.
Вы также можете попробовать увеличить размер якоря и количество катушек, чтобы сделать электромагнит более сильным. Будьте очень осторожны при использовании аккумуляторов с более высоким напряжением и оголенных проводов.Схема может выделять достаточно тепла, чтобы вызвать ожог, если провод удерживать слишком долго.
Другие проекты в области электроэнергетики:
Эти эксперименты идеально подходят для проектов научной ярмарки или для продолжения изучения электричества и магнетизма в домашних условиях.
Моторы, моторы, везде!
Без моторов ваш дом был бы без электричества! Двигатели переменного тока необходимы для генераторов электростанций, которые снабжают нас электричеством.
Многие небольшие моторы можно найти в автомобилях для электрических стеклоподъемников, обогревателей, вентиляторов охлаждения и дворников.Двигатели также можно найти повсюду в доме, особенно для тихоходных функций с высоким крутящим моментом.
Кухонные приборы, такие как блендеры и миксеры, превращают электричество в механическую энергию с помощью электродвигателей. В большинстве стиральных и сушильных машин используется двигатель переменного тока, позволяющий вращаться в любом направлении. Небольшие двигатели постоянного тока можно найти в проигрывателях DVD или CD, а также в дисководе компьютера. Вибратор в вашем мобильном телефоне также работает благодаря крошечному двигателю постоянного тока.
Принцип работы двигателя постоянного тока
Двигатель постоянного тока – это устройство, преобразующее постоянный ток в механическую работу.Он работает по принципу закона Лоренца, который гласит, что « проводник с током, помещенный в магнитное и электрическое поле, испытывает силу ». Опытная сила называется силой Лоренца. Правило левой руки Флемминга определяет направление силы.
Правило Флеминга для левой руки
Если большой, средний и указательный пальцы левой руки смещены друг относительно друга на угол 90 °, средний палец представляет направление магнитного поля.Указательный палец показывает направление тока, а большой палец показывает направление сил, действующих на проводник.
Формула рассчитывает величину силы,
Прежде чем понять принцип работы двигателя постоянного тока, мы должны сначала узнать о его конструкции. Якорь и статор – две основные части двигателя постоянного тока. Якорь – это вращающаяся часть, а статор – их неподвижная часть. Катушка якоря подключена к источнику постоянного тока.
Катушка якоря состоит из коммутаторов и щеток. Коммутаторы преобразуют переменный ток, индуцированный в якоре, в постоянный ток, а щетки передают ток от вращающейся части двигателя к неподвижной внешней нагрузке. Якорь размещается между северным и южным полюсами постоянного или электромагнита.
Для простоты предположим, что якорь имеет только одну катушку, которая расположена между магнитным полем, показанным ниже на рисунке A.Когда на катушку якоря подается постоянный ток, через нее начинает течь ток. Этот ток создает вокруг катушки собственное поле.
На рисунке B показано поле, индуцируемое вокруг катушки:
В результате взаимодействия полей (создаваемых катушкой и магнитом) результирующее поле развивается поперек проводника. Результирующее поле стремится вернуться в исходное положение, то есть на оси основного поля. Поле оказывает силу на концах проводника, и, таким образом, катушка начинает вращаться.
Пусть поле, создаваемое основным полем, будет F м , и это поле вращается по часовой стрелке. Когда в катушке течет ток, они создают собственное магнитное поле, скажем, F r . Поле F r пытается приблизиться к основному полю. Тем самым крутящий момент действует на катушку якоря.
Настоящий двигатель постоянного тока состоит из большого количества катушек якоря. Скорость двигателя прямо пропорциональна количеству катушек, используемых в двигателе. Эти катушки находятся под воздействием магнитного поля.
Один конец проводов находится под влиянием северного полюса, а другой конец – под влиянием южного полюса. Ток входит в катушку якоря через северный полюс и движется наружу через южный полюс.
Когда катушка перемещается от одной щетки к другой, одновременно меняется и полярность катушки. Таким образом, направление силы или крутящего момента, действующего на катушку, остается неизменным.
Вращающий момент, создаваемый в катушке, становится нулевым, когда катушка якоря перпендикулярна основному полю. Нулевой крутящий момент означает, что двигатель перестает вращаться. Для решения этой проблемы в роторе используется номер обмотки якоря. Таким образом, если одна из их катушек перпендикулярна полю, то другие катушки создают крутящий момент. И ротор движется непрерывно.
Кроме того, для получения постоянного крутящего момента конструкция сохраняется таким образом, что всякий раз, когда катушки пересекают магнитную нейтральную ось магнита, направление тока в катушках меняет направление на обратное.Это можно сделать с помощью коммутатора.
Принцип работы двигателя постоянного тока
Здравствуйте, друзья, мы делаем серию блогов о двигателях постоянного тока. В этом первом блоге мы говорим о принципе работы двигателя постоянного тока, как они работают? Также мы поговорим о конструкции двигателя постоянного тока.
Что такое двигатель постоянного тока?Двигатель постоянного тока – это двигатель, который преобразует постоянный ток в механическую работу.Он работает по принципу закона Лоренца, который гласит, что «проводник с током, помещенный в магнитное и электрическое поле, испытывает силу». И эта сила – сила Лоренца.
Типы двигателей постоянного токаСуществует 4 основных типа двигателей постоянного тока:
- Двигатель постоянного тока серии
- Двигатель постоянного тока с постоянным магнитом
- Шунтирующий / параллельный двигатель постоянного тока
- Составные двигатели постоянного тока
ДОЛЖЕН ПРОЧИТАТЬСЯ НА ДВИГАТЕЛЯХ ПОСТОЯННОГО ТОКА:
Конструкция двигателя постоянного токаПрежде чем понять принцип работы двигателей постоянного тока, мы должны узнать об их конструкции.Есть две основные части двигателя постоянного тока.
Вращающаяся часть – это якорь, а Статор – их неподвижная часть. Катушка якоря подключена к источнику постоянного тока.
Катушка якоря состоит из коммутаторов и щеток. Коммутатор преобразует индукцию переменного тока в якоре в постоянный ток, а щетки передают ток от вращающейся части двигателя к неподвижной внешней нагрузке. Якорь располагается между северным и южным полюсами постоянного или электромагнита.
Принцип работы двигателя постоянного токаДвигатель постоянного тока – это электрическая машина, преобразующая электрическую энергию в механическую. Основной принцип работы двигателя постоянного тока заключается в том, что всякий раз, когда проводник с током попадает в магнитное поле, он испытывает механическую силу.
Правило левой руки Флеминга и его величина определяют направление этой силы.
Правило левой руки Флеминга :Если мы растянем первый, второй и большой пальцы левой руки так, чтобы они были перпендикулярны друг другу, и первый палец представляет направление магнитного поля, второй палец представляет направление тока, тогда большой палец представляет направление силы, действующей на проводник с током.
F = BIL Ньютонов
Где,
B = плотность магнитного потока,
I = ток и
L = длина проводника в магнитном поле.
Когда обмотка якоря подключена к источнику постоянного тока, в обмотке возникает электрический ток. Постоянные магниты или обмотка возбуждения (электромагнетизм) создают магнитное поле. В этом случае проводники якоря с током испытывают действие магнитного поля в соответствии с принципом, изложенным выше.
Коммутатор сделан сегментированным для достижения однонаправленного крутящего момента. В противном случае направление силы менялось бы каждый раз, когда направление движения проводника менялось на противоположное в магнитном поле. Вот как работает двигатель постоянного тока!
Обратная ЭДС двигателя постоянного токаСогласно основному закону природы, преобразование энергии невозможно, пока не появится что-то, что препятствует преобразованию. В случае генераторов магнитное сопротивление обеспечивает это противодействие, но в случае двигателей постоянного тока возникает обратная ЭДС.Наличие обратной ЭДС делает двигатель постоянного тока «саморегулирующимся».
Когда якорь двигателя вращается, проводники также разрезают линии магнитного потока и, следовательно, согласно закону электромагнитной индукции Фарадея, в проводниках якоря индуцируется ЭДС.
Направление этой наведенной ЭДС таково, что она противодействует току якоря (I a ). На схеме ниже показано направление обратной ЭДС и тока якоря.
Значение обратной ЭДСВеличина обратной ЭДС прямо пропорциональна скорости двигателя.Представьте, что нагрузка на двигатель постоянного тока внезапно уменьшилась. В этом случае требуемый крутящий момент будет мал по сравнению с текущим крутящим моментом. Скорость двигателя начнет увеличиваться из-за превышения крутящего момента. Следовательно, величина обратной ЭДС пропорциональна скорости. С увеличением обратной ЭДС ток якоря начнет уменьшаться. Поскольку крутящий момент пропорционален току якоря, он также будет уменьшаться, пока не станет достаточным для нагрузки. Таким образом, скорость мотора будет регулироваться.
С другой стороны, если двигатель постоянного тока внезапно нагружается, эта нагрузка вызовет снижение скорости. Из-за уменьшения скорости уменьшается и обратная ЭДС, что позволяет увеличить ток якоря. Из-за увеличения тока якоря крутящий момент будет увеличиваться для удовлетворения требований нагрузки.
Надеюсь, эта статья поможет вам понять принцип работы двигателя постоянного тока.
Мы в Robu.in надеемся, что вам было интересно, и что вы вернетесь к другим нашим образовательным блогам.
.