
Принцип работы оптических энкодеров
Шкала с одной дорожкой
Шкала представляет собой единственную дорожку с контрастными линиями по всей ширине шкалы, с номинальным шагом 30 мкм. Отсутствие нескольких параллельных дорожек обеспечивает защищенность от ошибок, связанных с рысканьем, а также существенно более широкий поперечный допуск на положение головки.
Получение изображения
Изображение шкалы формируется асферической линзой, снижающей дисторсию, на детекторной матрице, специально разработанной для энкодеров RESOLUTE. Такая оптическая схема, в которой оптический путь при освещении является изломанным, а при формировании изображения – прямым, оказывается исключительно компактной и при этом работающей очень стабильно, что гарантирует высокую точность воспроизведения, столь важную для обеспечения высокого качества измерений.
Декодирование и анализ данных
После захвата изображения детектором оно передается аналогово-цифровым преобразователем (ADC) в мощный процессор цифровой обработки сигналов (DSP). Затем с помощью специально разработанных алгоритмов на основе кода, нанесенного на шкалу, получают истинное абсолютное, однако относительно грубое значение положения. После этого выполняется проверка, и вводятся поправки с помощью дополнительных алгоритмов в процессоре DSP, в которых учитывается избыточность и преднамеренно введенные ограничения кода шкалы. В других подпрограммах выполняется расчет «точного» положения с высоким разрешением, и это значение объединяется с данными по «грубому» положению, что дает в результате истинное абсолютное положение с очень высоким разрешением.
Затем с помощью специально разработанных алгоритмов на основе кода, нанесенного на шкалу, получают истинное абсолютное, однако относительно грубое значение положения. После этого выполняется проверка, и вводятся поправки с помощью дополнительных алгоритмов в процессоре DSP, в которых учитывается избыточность и преднамеренно введенные ограничения кода шкалы. В других подпрограммах выполняется расчет «точного» положения с высоким разрешением, и это значение объединяется с данными по «грубому» положению, что дает в результате истинное абсолютное положение с очень высоким разрешением.
Конечные проверки и вывод данных
После выполнения заключительных процедур проверки ошибок информация загружается по соответствующему протоколу в контроллер последовательно в виде чистого слова, описывающего положение с точностью в пределах 1 нм. Защита от электрических помех обеспечивается контролем с помощью циклического избыточного кода (Cyclic Redundancy Check – CRC). Весь этот процесс занимает всего несколько микросекунд и может повторяться до 25 000 раз в секунду. С помощью различных приемов, в том числе регулировки продолжительности вспышки с учетом скорости движения оси, такие характеристики поддерживаются на скоростях до 100 м/с, и при этом, что чрезвычайно важно, сохраняется исключительно низкий уровень дрожания при позиционировании при более низких рабочих скоростях.
С помощью различных приемов, в том числе регулировки продолжительности вспышки с учетом скорости движения оси, такие характеристики поддерживаются на скоростях до 100 м/с, и при этом, что чрезвычайно важно, сохраняется исключительно низкий уровень дрожания при позиционировании при более низких рабочих скоростях.
Подводя итог…
Таким образом, мы имеем энкодер с широкими допусками к установке: Система RESOLUTE допускает погрешность ±0,5° по углу рысканья, тангажа и крена, а для расстояния между шкалой и считывающей головкой – целых ±150 мкм. В то же время широкая зона охвата оптики и усовершенствованные процедуры коррекции ошибок обеспечивают исключительно высокую устойчивость к оптическим помехам, связанными с пятнами, создаваемыми посторонними частицами или смазкой. При этом сохраняется разрешение 1 нм при скорости 100 м/с: RESOLUTE – вот ответ на самую сложную задачу абсолютных измерений.
что это такое, принцип работы, виды, для чего используется
a:2:{s:4:”TEXT”;s:21101:”РазновидностиРазличаются следующие виды https://techtrends.
 ru/catalog/enkodery/” target=”_blank”>энкодеров:
ru/catalog/enkodery/” target=”_blank”>энкодеров: абсолютного типа;
инкрементального типа.
Абсолютная модель выдает уникальные цифровые коды относительно отдельно взятого расположения вала, потому становится возможным определять углы поворота даже после того, как было отключено электропитание.
Энкодеры инкрементального вида выдают импульсный цифровой код для каждого отдельно взятого положения вала электромотора. Такие устройства позволяют определять, с какой скоростью вращается вал во время отключения электропитания в том случае, когда нет необходимости сохранять информацию об абсолютном угловом положении.
Иначе говоря, в то время, когда вал не движется, импульс не поступает. Следовательно, когда он снова приходит в движение, датчики будут вести отсчеты его угловых параметров с исходной позиции.
Инкрементальный энкодер
Импульсные (они же пошаговые) энкодеры относят к той разновидности энкодирующих устройств, что предназначены с целью указания направлений углового перемещения всевозможных внешних механизмов.
 Пошаговые энкодеры формируют импульсы, число которых соответствует числу поворота вала на определенные углы. Они связаны со счетными приборами – это требуется для того, чтобы можно было считать импульсы и преобразовывать их в измерения перемещения вала.
Пошаговые энкодеры формируют импульсы, число которых соответствует числу поворота вала на определенные углы. Они связаны со счетными приборами – это требуется для того, чтобы можно было считать импульсы и преобразовывать их в измерения перемещения вала.Конструктивные особенности
Конструктивной особенностью данной разновидности можно считать наличие следующих элементов:
источник света;
специальный диск с нанесенными на нем отметками;
фототранзисторная сборка;
схемы для обрабатывания сигналов.
Метки, нанесенные на диск, распределяются определенным образом – их число будет определяться числом импульсов, осуществленных в рамках одного оборота. К примеру, если диск разделяется на 1000 меток, то в продолжение 250 импульсов вал будет повернут под прямым углом.
Применяемые технологии – магнитная и оптическая
Сегодня энкодеры работают, как правило, на основании двух технологий – оптической и магнитной.

Так, в приспособлениях оптического типа в качестве первичных датчиков сигналов выступают оптические диски, описанные выше. Число зачерненных и прозрачных отметок, расположенных на диске, будет определять и степень разрешения.
Но в последнее время популярность начинают приобретать энкодеры магнитного типа. В них сигналы положения вала двигателя формируются специальным датчиком. При этом открываются новые технологические возможности, к примеру, программируемое число импульсов за один оборот.
Квадратура выхода
В качестве так называемой квадратуры выхода в данном виде энкодирующих устройств применяется пара выходных каналов. Они позволяют определять, в каком именно направлении происходит вращение вала.
При этом энкодеры, оборудованные всего одним выходом (на схеме обозначается литерой А), носят название тахометров.
Максимальная частота ответа
В качестве максимальной частоты ответа выступают частоты, при которых работающий энкодер дает электрические ответы.
 Максимальные частоты определяют число импульсов на выходе, на которые он отзывается в течение одной секунды.
Максимальные частоты определяют число импульсов на выходе, на которые он отзывается в течение одной секунды.Таким образом, пошаговые энкодеры должны удовлетворять следующему отношению:
(rpm / 60)x(разрешение) меньше или равно максимальной частоте ответа.
Разрешение
Под разрешением подразумевают число выходных импульсов при каждом вращении вала.
Соединительный вал
Чтобы вал датчика был соединен механическим способом, нужно применять специальные гибкие соединители – эластичные муфты. Они предназначены для того, чтобы компенсировать возможное биение вала в любых направлениях.
Благодаря этому, снижается степень преждевременного выхода из строя валового механизма датчика. Даже минимальные люфты могут вывести энкодер из строя.
Виды пошаговых энкодеров и их особенности
Кроме предложенной выше классификации, инкрементальные энкодирующие устройства можно поделить согласно типу информации для считывания.

Одиночные нужны для простого подсчета числа импульсов.
Преимущества:
максимальная простота в конструкции и использовании;
Недостатки:
во время запуска непонятно, в каком именно положении находится;
велика вероятность ошибок во время подсчета импульсов из-за ложного срабатывания;
нельзя определить направленность движения.
Квадратурные, они же двойные, энкодеры позволяют считывать не только число поступаемых импульсов, но и направление движения.
Преимущества:
простота конструкции;
практически отсутствуют ошибки во время счета импульсов;
можно определять направленность движения.
Недостатки:
во время запуска непонятно, в каком именно положении находится энкодер.
Энкодирующие устройства, построенные на двоичном коде, позволяют определять точное положение устройства в тот или иной момент.

Преимущества:
инициализация происходит без ошибок;
нет необходимости в считывании импульсов;
можно определять направленность движения.
Недостатки:
из-за наличия нескольких датчиков аппарат несколько сложнее;
возникновение проблем с граничным положением в случае использования более одного бита;
разрешающая способность несколько ограничена.
Энкодирующие устройства, основанные на так называемом коде Грэя, дают возможность определять положение в данный момент.
Преимущества:
безошибочная инициализация и подсчет импульсов;
можно определять, в каком направлении происходит вращение;
Недостатки:
относительно сложны в использовании;
присутствует определенное ограничение по разрешению.
Некоторые особенности подключения
При подключении и отладке энкодеров необходимо строго придерживаться рекомендаций, данных производителем.
Для начала нужно собрать исходную схему, согласно инструкции от производителя, и подключиться к выводам А и В с помощью осциллографа. Далее необходимо подкрутить подключаемый энкодер сначала по часовой стрелке, а затем – в противоположном направлении. При изменении направления вращения будет изменяться и последовательность замыкания контактных пластин.
Поскольку в энкодерах работают контакты механического типа, то всегда есть риск возникновения так называемого дребезга. Это приводит к тому, что контакт может замыкаться и размыкаться самопроизвольно – из-за естественной упругости материала.
Чтобы избежать дребезга, можно пойти двумя путями. Например, добавить еще несколько конденсаторных или резисторных элементов. Дребезги в этом случае можно довольно легко погасить.
 При этом осциллограф покажет крутые фронты и отсутствие дребезга.
При этом осциллограф покажет крутые фронты и отсутствие дребезга.А вот второй метод является программным. Это потребует от исполнителя знаний программирования. Зато можно будет отслеживать состояние энкодирующего устройства при помощи внешнего прерывания. В этом случае необходимо организовать задержки в течение 2-3 десятков миллисекунд после каждого срабатывания прерывания. В это время энкодер перестанет фиксировать изменения состояний вывода, следовательно, перестанет быть чувствительным к дребезгам.
Используется несколько методов обработки данных, поступающих с прибора. Например, одна из его ножек подключается к выходу для внешнего прерывания и настраивается на прерывание по спадающим фронтам. При этом проверяется положение второй ножки. В том случае, если на ней фиксируется нулевое состояние, движение вала осуществляется в одном направлении. При этом светодиоды загораются или гаснут в зависимости от направления вращения.
Согласно второму методу, нужно сравнить настоящее положение с предыдущим.
Крепление устройства с вращающимися объектами осуществляется через нормальные или полые валы. При этом полый вал может быть выполнен как в сквозном, так и в несквозном варианте. Здесь все зависит от конкретных конструктивных особенностей устройства и преследуемых целей.
Валы энкодера и вращающихся объектов соединяются также с помощью гибких или жестких соединительных муфт. Как альтернативный вариант крепления, нередко используют монтаж прямо на вал самого объекта. Это возможно, если аппарат оснащен полым валом. Чтобы не допустить возможного возникновения несоосности и биений, можно зафиксировать его через штифты.
 Если же речь идет о неполом вале, то биение может быть скомпенсировано через гибкую деформацию втулки.
Если же речь идет о неполом вале, то биение может быть скомпенсировано через гибкую деформацию втулки.Чем привлекательны данные виды энкодеров
Энкодирующие устройства неспроста получили столь обширное распространение при конструировании большого спектра устройств. Они довольно дешевы и просты в монтаже.
Чтобы выбрать верный вариант для успешного внедрения в те или иные управленческие схемы, потребуется определиться:
Насколько точно требуется проводить измерения. Об этом будет говорить число обрабатываемых импульсов за каждый оборот энкодирующего вала.
Толщина вала, а также его модельная разновидность. Это влечет за собой необходимость в правильном подборе дополнительного оборудования, такого, как муфты, фланцы и т.д.
Определиться с необходимой длиной кабеля, его поперечным сечением, а также с типом разъемов на выходе.
Потребуется принять во внимание величину рабочего напряжения и прочие электрические характеристики.

Осуществление связи энкодирующего оборудования с остальными элементами системы. Нужно будет уметь его программировать, обеспечивать параметры цикличности осуществления передачи результата замеров с частотностью опроса на входе используемых контроллеров, либо предусмотреть работу в стандартном интерфейсе.
“;s:4:”TYPE”;s:4:”HTML”;}
что это такое, принцип работы, виды, для чего используется
a:2:{s:4:”TEXT”;s:17041:”Наиболее важный параметр прибора – число импульсов, которые образуются в течение совершения одного оборота. Это так называемая разрядность https://techtrends.ru/catalog/enkodery/” target=”blank”>энкодера. Иногда ее еще называют разрешением или разрешающей способностью. Как правило, параметры разрешающей способности равны 1 024 за каждый оборот.
Среди прочих важных конструктивных параметров выделяют:
Рабочее напряжение на устройстве.
Тип вала – он может быть как пустым, так и сплошным.

Размеры вала и отверстия.
Способ выхода.
Габариты корпуса устройства.
Метод крепления.
Разновидности энкодеров
Любой энкодер представляет собой поворотный датчик. Самая простая его конструкция оснащается ручкой, которая может осуществлять повороты в разные стороны. От того, на сколько углов было совершено вращение, а также от направления вращения и будет зависеть цифровой сигнал на выходе.
Эти устройства принято разделять по таким критериям:
инкрементные и абсолютные;
оптические, магнитные и механические.
Энкодер инкрементного типа образует импульсы, которые определяются устройством считывания информации. Это и позволяет им определять положение того или иного объекта, а также подсчитывать количество импульсов.
Когда устройство приводится в работу, настоящее положение целевого объекта еще неизвестно. Для того чтобы подключилась система отсчета, используется нулевая отметка.
 Через нее вал проходит после включения энкодера.
Через нее вал проходит после включения энкодера.При всех своих плюсах, данная разновидность устройств имеет некоторые недостатки. Например, то, что определение пропуска импульсов от преобразовательного устройства невозможно. Порой это способствует накоплению ошибок во время определения угла поворота. Чтобы избежать этого, применяют пару каналов измерения – синусные и косинусные.
Абсолютные энкодеры имеют специальный поворотный круг, который разделен на специальные секторы, как правило, имеющие одинаковые размеры и пронумерованные. Когда устройство включается в работу, выдается тот или иной номер сектора, где оно находится в данный момент. Отсюда и название – абсолютный энкодер. Данная конструктивная особенность позволяет быстро определить как угол, так и положение, а также направление вращения. Данные параметры определяются относительно нулевого сектора диска.
Абсолютные угловые датчики не требуют соединения системы отсчета с нулевым значением.
 Для начала определения положения и иных показателей в них применяется так называемый код Грея. Именно он позволяет избегать ошибок.
Для начала определения положения и иных показателей в них применяется так называемый код Грея. Именно он позволяет избегать ошибок.Можно назвать лишь один недостаток данного типа датчика – это необходимость постоянного перевода в двоичные коды для определения положения. Оптический тип датчика конструктивно предусматривает наличие оптического растрового диска, который закрепляется на вал. Когда тот вращается, формируется световой поток, затем он воспринимается фотоприемником.
Оптические энкодеры абсолютного типа – это устройства, в которых каждая позиция вала обладает своим выходным цифровым кодом, являющимся главным показателем для устройства. Согласно ему и производятся вычисления, а также закрепление параметров передвижения диска.
Существует также магнитная разновидность энкодеров, которые регистрируют движение подвижных магнитных элементов. Затем данные переводятся в определенные сигналы, понятные системе.
Наконец, механические энкодеры.
 Они имеют диск, изготовленный из диэлектрика, на котором нанесены выпуклые, либо непрозрачные области. Значение абсолютного угла считывается при помощи линейки контактов и переключателей. Здесь также работает код Грея. Он позволяет устранить неоднозначные интерпретации сигналов.
Они имеют диск, изготовленный из диэлектрика, на котором нанесены выпуклые, либо непрозрачные области. Значение абсолютного угла считывается при помощи линейки контактов и переключателей. Здесь также работает код Грея. Он позволяет устранить неоднозначные интерпретации сигналов.В качестве минусов данных типов энкодеров можно назвать разбалтывание контактов со временем. Это будет приводить к тому, что сигнал подвергнется искажению, выдавая не всегда достоверные подсчеты. Датчики оптических и магнитных моделей лишены данного недостатка.
Кроме того, различают одно- и многооборотные энкодеры. Однооборотным является датчик, выдающий показания по абсолютному значению в рамках вращения на 360 градусов, то есть внутри одного оборота. После того, как оборот будет совершен, код начинает считываться заново. Обычно датчики таких моделей находят свое применение в антенных системах, коленчатых прессах и т.п.
Многооборотные устройства, как несложно догадаться, рассчитаны на счет кодов в течение определенного числа оборотов.
 К примеру, для линейных проводов, либо для измерительных задач при помощи зубчатых измерительных штанг данный подход считается неприменимым. Тогда выручают датчики, которые не только измеряют углы поворотов внутри одного вращения, но и регистрируют количество вращений посредством особого передаточного устройства.
К примеру, для линейных проводов, либо для измерительных задач при помощи зубчатых измерительных штанг данный подход считается неприменимым. Тогда выручают датчики, которые не только измеряют углы поворотов внутри одного вращения, но и регистрируют количество вращений посредством особого передаточного устройства.Особенности настроек и подключения
Монтажом энкодеров должен заниматься только профессиональный мастер. Они монтируются обычно на том валу, с которого считывается информация. Применяются переходные муфты для компенсации различия размеров. Корпус энкодера необходимо как можно более прочно закрепить.
Если же речь идет о монтажных работах на полом валу, то требуется прибегнуть к иному методу. В этом случае вал включается внутри датчика и монтируется внутри полой втулки. При этом сам корпус считывающего устройства закреплять не следует.
Если брать самый элементарный случай подключения, то, по возможности, следует подключить выход преобразователя к входу счетного устройства, и запрограммировать его на определенные параметры скорости.

В основном, преобразователи применяются совместно с контроллерами. К преобразователю необходимо присоединить нужные выходы. После этого программой будет автоматически определено, какое положение объект занимает в данный момент времени, какова его скорость, каким ускорением он обладает.
Характеристики
Каждая разновидность энкодера имеет свои особенности и характеристики:
Величина импульсов, которая производится в момент одного оборота диска в процессе работы. Может варьироваться от 1 до 5 тысяч импульсов.
Для абсолютных энкодеров важна такая характеристика, как разрядность бит или их количество.
Тип вала, используемого в устройстве, может отличаться – он бывает с прямой осью или полый.
Учитывается разновидность используемого фланца на валу под шпонку.
Сигнал при выходе может отличаться.
Уровень напряжения питания.
Используемый тип разъема и длина кабеля.
В зависимости от сложности устройства и возможности выдерживать различные нагрузки, отличается и сфера применения.
 Простые датчики имеют минимальное оснащение и используются в несложных механизмах. Высокоточные устройства с высокой производительностью, защитой от температурного воздействия или взрывов применяются в промышленности и сложных технических устройствах.
Простые датчики имеют минимальное оснащение и используются в несложных механизмах. Высокоточные устройства с высокой производительностью, защитой от температурного воздействия или взрывов применяются в промышленности и сложных технических устройствах.Где может быть использовано устройство
Существует немало сфер и областей, в которых энкодеры нашли широкое применение. Достаточно рассмотреть наглядные примеры использования этих устройств, чтобы убедиться в их популярности:
В механизмах, работающих для нужд печатной промышленности, эти датчики контролируют вращение валов, по которым проходит бумага и краска.
На предприятиях, где ведется металлообработка, они задействованы при вращении валов с металлическими лентами.
При конструировании различных моделей и устройств в области робототехники помогают контролировать движение различных частей робота.
В автомобилестроении с помощью датчиков определяется угол поворота колеса.

Городское хозяйство нельзя представить без лифтов – для их работы также требуются энкодеры.
В пищевой и химической промышленности необходимо постоянно фасовать продукцию в больших объемах. Этим занимаются автоматизированные устройства, в которых установлены энкодеры.
Даже в домашних условиях можно легко найти предмет, в котором есть энкодер – это компьютерная мышь, которая есть практически в каждой квартире.
В различных электротехнических устройствах, например, сервомоторах, требующих высокой точности, также установлены датчики.
В зависимости от сферы использования и особенностей устройства, энкодеры могут решать различные задачи. Они измеряют угловые положения, помогают определить позиционирование объектов, детектируют положение в пространстве, могут проводить определение позиций с высокой точностью, а также измерять вращательные движения.
“;s:4:”TYPE”;s:4:”HTML”;}
Инкрементальный угловой энкодер: принцип действия, области применения
Инкрементальные датчики обеспечивают отличную обратную связь по скорости и пройденному пути, и, поскольку используется небольшое количество измерительных элементов, такие системы являются простыми и недорогими.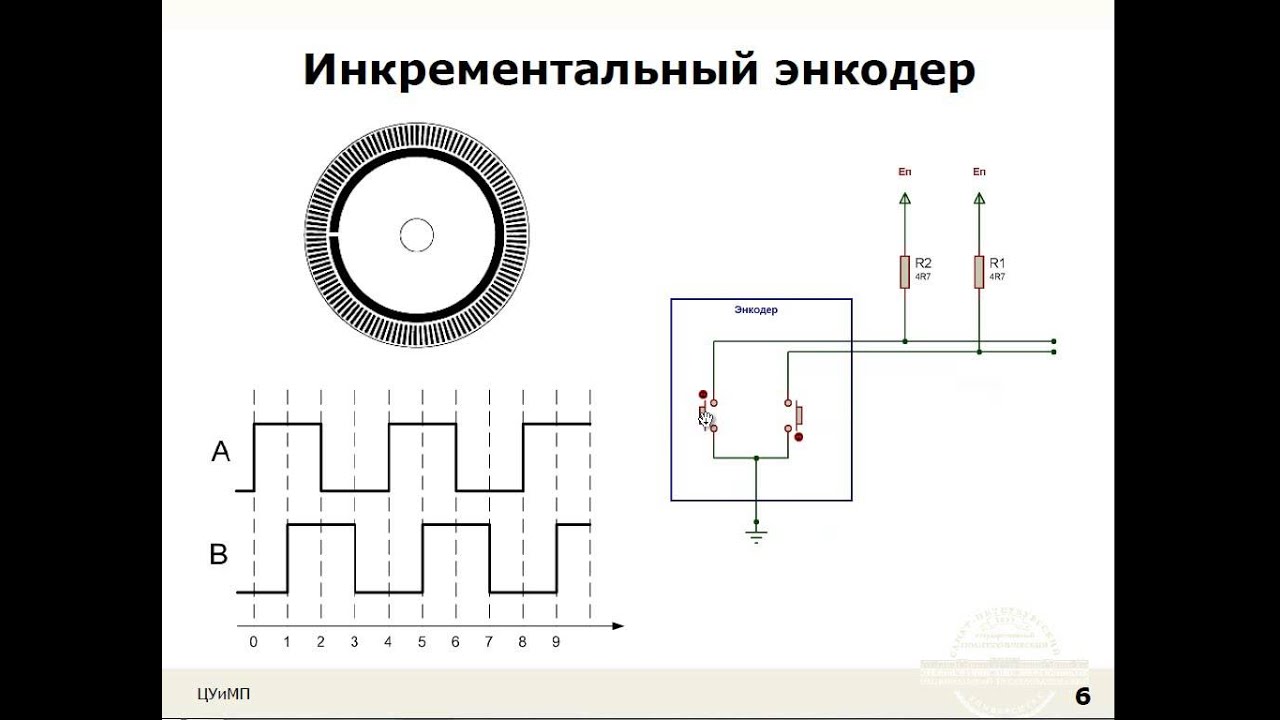
Инкрементальные энкодеры
Еще называют относительный датчик (угла, обратной связи или линейный), перемещений, счетчик импульсов. Определяет относительное перемещение, учитывая только разницу между измерениями. Электроника с датчика посылает импульсы (часто называемые квадратурными) по каналам, а смещения в этих импульсах указывают на направление и величину перемещения / движения. Устройства обеспечивают отличную обратную связь по скорости, пройденному пути. Поскольку используется небольшое количество измерительных элементов, такие системы являются простыми, недорогими, надежными. Тем не менее, данные преобразователи чувствительны к таким факторам окружающей среды, как вибрация (негативное влияние уменьшается по мере улучшения технологии измерений), могут терять разрешающую способность на высоких оборотах из-за ограничений по выходной частоте. Они также ограничены возможностью предоставления информации только о перемещении, поэтому для вычисления позиции такие датчики требуют наличия маркера исходного (нолевого) положения, обычно это референтная (нолевая) метка.
Ситуации, когда необходимо применять абсолютные энкодеры
Абсолютный угловой датчик самостоятельно определяет данные о положении – ему не нужно полагаться на внешнюю электронику, чтобы выдать реальное текущее положение. Абсолютные преобразователи позволяют работать без дополнительных внешних компонентов и с повышенным быстродействием станкам и системам, которые:
- полагаются на нелинейное позиционирование
- обрабатывают большие детали
- имеют длительный рабочий цикл
В реальной жизни абсолютные энкодеры обеспечивают более высокую точность работы оборудования:
- Обратная связь в многоосевых станках с ЧПУ, используемых при производстве всевозможных деталей
- Автоматическое определение высоты больничных коек с подъемным механизмом ножничного типа
- Точное перемещение портальных осей для больших транспортных средств, таких как краны или морские / карьерные подъемники
- Перемещение автоматических дверей или отсеков без конечных выключателей
- Непрерывное точное роботизированное движение даже после сбоя питания
Очевидной сильной стороной абсолютных датчиков, особенно по сравнению с резольверами или инкрементальными аналогами, является влияние на общую производительность их точности и скорости определения положения.
Как работает инкрементальный энкодер
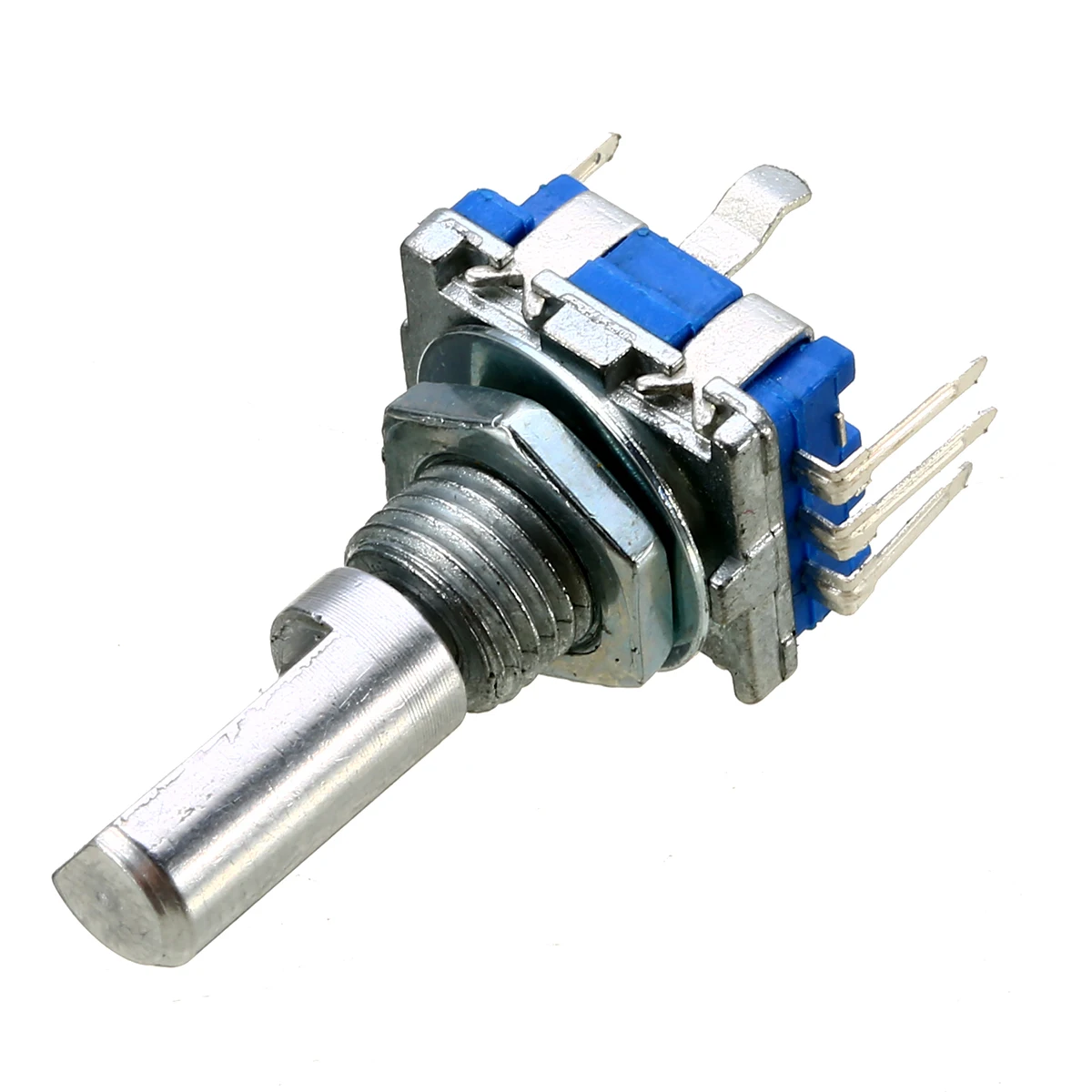
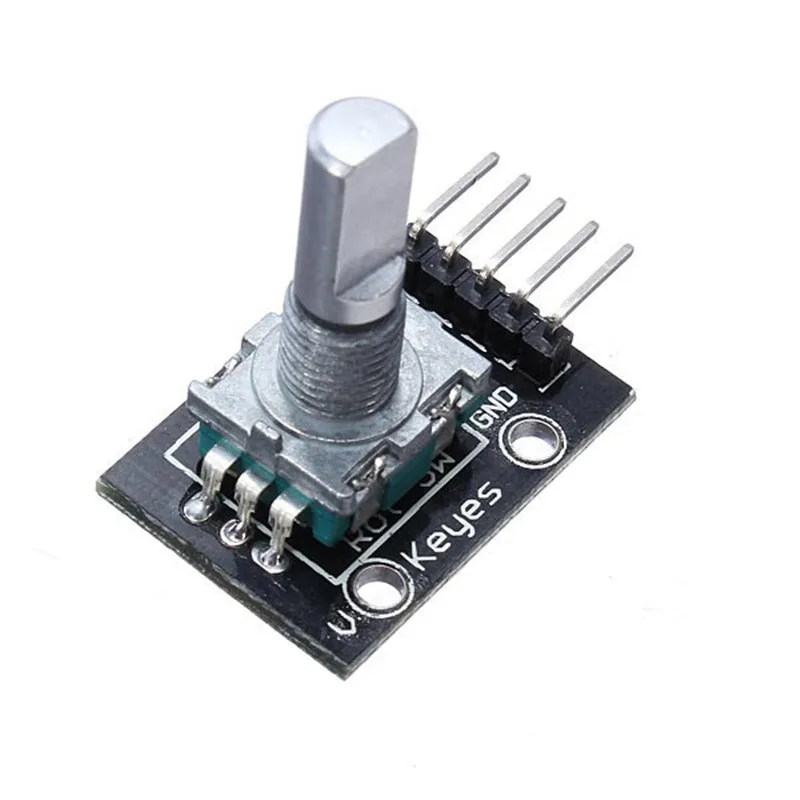
Устройство выдает определенное количество импульсов за один оборот вала. Выходом может быть одиночный канал (часто называют «A») или два канала («A», «B»), которые смещены относительно друг друга для. Смещение каналов позволяет выявить направление вращения. Смещение фаз двух сигналов называется квадратурой. Стандартно прибор состоит из оптико-механического подшипникового узла, печатной платы, корпуса, выходного соединителя. Печатная плата содержит сенсорную матрицу, которая регистрирует два первичных сигнала с целью дальнейшей обработки.
Дополнительные выходы датчиков:
Канал референтной (ноль) метки (его называют “Z” или “R”) в виде одного импульса на оборот служит для поиска нолевой позиции или для контроля работы выходов A, B. Эта метка может быть привязана к A или B в их различных состояниях. Она также может быть различной по ширине.
Коммутация с помощью U, V, W треков может быть предусмотрена в некоторых преобразователях. Треки согласуются с коммутирующими обмотками серводвигателей. Они также обеспечивают возможность подачи с электропривода или усилителя в каждую обмотку двигателя тока нужной силы в правильной последовательности.
Альтернативы инкрементальным энкодерам: резольверы, абсолютные энкодеры, энкодеры с аналоговым сигналом.
Применение инкрементальных энкодеров
Прибор разработан как универсальный, настраиваемый в соответствии с широким спектром задач сенсор. Выделяют три обширные области использования в зависимости от внешних условий:
- Тяжелые условия эксплуатации: агрессивная рабочая среда с высокой вероятностью воздействия загрязнений, влаги, высокой температуры, ударов, вибрации, как, например, на целлюлозно-бумажных, сталелитейных, деревообрабатывающих заводах.
- Промышленная автоматизация: общепроизводственные рабочие условия, которые требует стандартного класса защиты IP, устойчивости к средней силы ударам, вибрация, температурным колебаниям, как например, на заводах по производству продуктов питания, напитков, текстильных заводах, на автоматизированном заводском оборудовании в целом.
- Легкие промышленные условия / Сервоустройства: сфера контроля перемещений и позиционирования с высокими требованиями к точностным, температурным характеристикам, например, робототехника, электроника, полупроводниковое приборостроение.
Оптические угловые энкодеры
Используют метод прохождения света через специальный индикаторный растр (шкалу) для определения положения вала, следовательно, объекта.
Самую простую конструкцию среди оптических угловых датчиков имеет модель с «щелевой» (по принципу расчески) маской (индикаторной пластиной), но существует ряд других исполнений, которые обеспечивают еще большую стабильность и эффективность работы.
Принцип работы энкодеров
Датчики углового и линейного перемещения, датчики наклона
Инкрементальные энкодеры
Инкрементальный энкодер (Incremental Encoder) регистрирует относительное перемещение (приращение). Разрешение (Resolution) углового энкодера определяется количеством импульсов на один оборот (на рисунке изображён оптический дик с разрешением 8 имп/об).
Частота импульсов на выходе энкодера пропорциональна скорости вращения.
Система управления должна подсчитывать импульсы, чтобы вычислить угол поворота энкодера относительно точки отсчёта.
В системах, работающих с абсолютными координатами (станок с ЧПУ), перед началом работы (после включения питания) необходимо выставить ноль – вывести рабочий орган машины в опорную (реперную) точку и в ней обнулить счётчик импульсов.
Синусно-косинусные инкрементальные датчики положения sin/cos 1-Vss и 1-Vpp
Синусоидальные выходные сигналы А и В сдвинуты друг относительно друга на 90 градусов, что позволяет определять направление вращения. Сигнал нулевой метки R используется для синхронизации с точкой отсчёта. Для повышения помехозащищённости датчик выдаёт ещё три инверсных сигнала: A, B, R. Оцифровываются эти сигналы в системе измерения.
Датчики с интерфейсом 1-Vpp используются в сервосистемах, т.к. как позволяют получать очень высокое разрешение. Так, например, если датчик выдаёт 2048 периодов синусоиды (импульсов) на оборот, а система управления в каждой такой синусоиде различает 2048 дискретных уровней, то общее разрешение датчика составит 2048 х 2048 = 4194304 импульсов на оборот.
Инкрементальные датчики с интерфейсом TTL или HTL
Эти датчики сами оцифровывают синусоидальные сигналы – у них на выходе 6 прямоугольных сигналов – три прямых: A, B, R и три инверсных: A, B, R. Для сигнализации неисправности датчика используется инверсный сигнал помехи (если нет неисправности, то сигнал помехи равен 1).
Абсолютные энкодеры
Разрешение абсолютного энкодера (Absolute Encoder) определяется количеством уникальных кодов на один оборот. Однооборотные (Single-turn) абсолютные энкодеры определяют положение в пределах одного оборота, многооборотные (Multi-turn) – в пределах определённого числа оборотов.
Абсолютные датчики положения не требуют для начала работы выхода в опорную точку – при включении питания датчик сразу определяет координату, сканируя кодовые дорожки.
Резольверы
Резольвер (Resolver) – это аналоговый электромагнитный абсолютный однооборотный датчик, работающий по принципу вращающегося электрического трансформатора.
Рассмотрим работу бесщёточного резольвера.
На статоре расположены три обмотки: первичная обмотка возбуждения вращающегося трансформатора
(на неё подаётся переменное напряжение) и две двухфазные обмотки, механически повёрнутые друг относительно друга
на 90 градусов: синусная и косинусная.
На роторе расположена вторичная обмотка вращающегося трансформатора, которая возбуждается от первичной обмотки
на статоре за счёт электромагнитной индукции. Обмотка ротора в свою очередь индуцирует в синусной обмотке статора
напряжение пропорциональное синусу угла поворота ротора, а в косинусной обмотке – напряжение пропорциональное
косинусу угла поворота ротора.
Резольверы отличаются высокой надёжностью (они не бьются и не запотевают, как оптические) и точностью (аналоговые, а не дискретные).
Код Грея
Код Грея (Gray Code) – это двоичный код, в котором два соседних значения отличаются только одним разрядом.
| Десятичное число | Двоичное число | Код Грея |
|---|---|---|
| 0 | 000 | 000 |
| 1 | 001 | 001 |
| 2 | 010 | 011 |
| 3 | 011 | 010 |
| 4 | 100 | 110 |
| 5 | 101 | 111 |
| 6 | 110 | 101 |
| 7 | 111 | 100 |
Формула побитного преобразования двоичного кода в код Грея
Gi = Bi⊕Bi+1,
биты нумеруются справа налево, ⊕ – исключающее ИЛИ (если биты равны, то результат равен 0; если биты не равны, то результат равен 1).
Код Грея используется для кодирования положений в абсолютных датчиках, так как обладает большей помехозащищённостью, чем обычное двоичное кодирование (Natural Binary).
На рисунке изображён оптический диск с 3-х разрядным (8 положений) кодом Грея.
Тахогенераторы
Тахогенераторы предназначены для определения скорости и направления вращения. Напряжение на выходе тахогенератора пропорционально скорости вращения вала.
Энкодеры – назначение, виды, характеристики
Что такое энкодер
Энкодер (преобразователь угловых перемещений) – это электронное устройство, позволяющее с необходимой точностью измерить различные параметры вращения какой-либо детали, как правило, вала электродвигателя или редуктора.
Измеряемыми параметрами могут быть: скорость вращения, угловое положение по отношению к нулевой метке, направление вращения. Фактически энкодер является датчиком обратной связи, на выходе которого цифровой сигнал меняется в зависимости от угла поворота. Этот сигнал обрабатывается и далее подается на устройство индикации или на привод.
Применение энкодеров
Энкодеры широко применяются в промышленном оборудовании в ситуациях, когда необходима точная информация об объекте, который вращается или перемещается. Это может быть лента транспортера с какими-либо деталями или грузами, система измерения длины и проч. Энкодер позволяет цифровым способом узнать точную позицию детали или угол её поворота.
Виды энкодеров
Существуют два вида энкодеров – инкрементальный и абсолютный.
Инкрементальный энкодер по конструкции проще абсолютного и используется в подавляющем большинстве случаев. Данное устройство можно представить как диск с прорезями, который просвечивается оптическим датчиком. При вращении диска датчик включается или выключается в зависимости от того, находится ли он над прорезью или нет. В результате на выходе энкодера формируется последовательность дискретных импульсов, частота которых зависит от разрешения устройства (см. ниже) и частоты его вращения.
Для того, чтобы определять начальное положение (точку отсчета), используется нуль-метка (выход Z, Zero), которая формируется один раз на полный оборот. Для определения направления вращения у энкодеров обычно имеются два выхода (А и В), на которых импульсы сдвинуты по фазе на четверть периода. По разнице фаз можно однозначно определить, в какую сторону вращается вал.
Основным минусом инкрементального энкодера является необходимость непрерывной обработки и анализа сигналов — для этого требуется контроллер и соответствующая программа. Кроме того, чтобы узнать положение инкрементального энкодера после подачи на него питания, необходимо провести инициализацию для поиска нуль-метки.
Абсолютный энкодер имеет более сложное устройство, но позволяет определить угол поворота в любой момент времени, даже в неподвижном состоянии механизма сразу после включения питания. На выходе абсолютного энкодера действует параллельный код Грея, разрядность которого определяет разрешение, а значит и точность показаний датчика.
Основные параметры
Главный параметр любого энкодера – разрешение, то есть количество импульсов (для абсолютного преобразователя – разрядность, или количество бит) на один оборот. Довольно часто используются преобразователи с разрешением 1024 импульса на оборот.
Прочие параметры:
- напряжение питания – от 5 до 24 В
- тип вала – сплошной, полый, без вала (сквозное отверстие)
- диаметр вала или отверстия
- тип выхода – как правило, транзисторный выход с открытым коллектором
- также учитываются размер корпуса, тип крепления и степень защиты
Также учитываются размер корпуса, тип крепления и степень защиты.
Монтаж
Энкодер крепится на валу, параметры вращения которого измеряются. Для монтажа используется специальная переходная муфта, позволяющая компенсировать возможную несоосность с валом энкодера, при этом его корпус должен быть жестко зафиксирован.
Другой вариант крепежа подходит для преобразователей с полым валом. В этом случае вал, параметры вращения которого подлежат измерению, непосредственно входит внутрь преобразователя и фиксируется в полой втулке либо в сквозном отверстии. В данном случае корпус энкодера не фиксируется, за исключением какой-либо пластины или ограничителя, не позволяющей ему вращаться.
Подключение
В простейшем случае, если позволяет ситуация, выход энкодера можно подключить ко входу счетчика и запрограммировать его на измерение скорости.
Но, как правило, энкодер используется совместно с контроллером. К контроллеру подключаются все необходимые выходы, и его программа рассчитывает скорость, ускорение, положение объекта с необходимыми коэффициентами и размерностями.
Например, энкодер установлен на валу электродвигателя, который перемещает одну деталь по направлению к другой. Путем вычислений на экране оператора отображается зазор между деталями, а при достижении некоторого минимального зазора движение деталей прекращается, чтобы избежать их повреждения.
Также преобразователи угловых перемещений нередко используются в качестве элемента обратной связи на валу двигателя, подключенного через частотный преобразователь. В этом случае энкодер устанавливается на валу двигателя или редуктора, и подключается к частотнику через специальную плату сопряжения. Таким образом, появляется возможность точного позиционирования поддержания нужной скорости и момента двигателя.
Другие полезные материалы:
10 типичных проблем с частотниками
FAQ по электродвигателям
Использование тормозных резисторов с ПЧ
Оптические и индуктивные энкодеры: что лучше?
Автор статьи: Zettlex UK Ltd
Перевод на русский язык подготовлен официальным представителем Zettlex в России – компанией ООО АВИ Солюшнс
С учетом существующего многообразия технологий позиционирования, неудивительно, что инженеры-разработчики могут испытывать затруднения при выборе подходящего датчика для своего проекта. В данной статье рассматривается, как работают оптические и индуктивные энкодеры, а также анализируются их относительные сильные и слабые стороны.
Оптические энкодеры остаются наиболее распространенным выбором в качестве датчика положения для производителей оборудования с 1970-х годов. Они широко доступны от ряда производителей и могут быть установлены в различном промышленном оборудовании, таком как принтеры, станки с ЧПУ и роботы. Традиционные индуктивные датчики положения: резольверы и дифференциальные трансформаторы для измерения линейных перемещений (англ. LVDT – Linear Variable Differential Transformer), существуют с 1940-х годов, но находят не такое широкое применение. Они, как правило, используются в жестких условиях эксплуатации или в приложениях, критичных по безопасности, в аэрокосмической, оборонной и нефтехимической отраслях, где их надежность и прочность превосходят их высокую стоимость, объем и вес. Однако новый тип устройств, индуктивный энкодер или “incoder” (англ. Incoder – Inductive encoder), занимает всё большую долю на рынке и меняет традиционный баланс. Incoder можно рассматривать как гибрид индуктивных и оптических технологий.
В первую очередь остановимся на терминологии. Энкодер – это устройство, которое преобразует положение или движение в электрический сигнал, обычно это цифровой код. Их также называют поворотными энкодерами, энкодерами с выходным валом, угловыми датчиками, угловыми энкодерами или датчиками угла поворота, угловыми передатчиками – и этот список можно продолжить. Для целей настоящей статьи далее будем использовать термин энкодер.
Энкодеры в разделе каталога
Энкодеры могут быть поворотными или линейными. Они также могут быть абсолютными или инкрементальными, и это важное различие. Если мы рассмотрим простой абсолютный вращающийся энкодер, то его электрический выход показывает текущее угловое положение вала сразу после включения питания. Выход инкрементных датчиков передает информацию только о движении вала. Другими словами, выходной сигнал от инкрементного энкодера выдает данные о положении только при движении. Некоторые инкрементные датчики оснащены контрольной отметкой, таким образом энкодер может использовать это в качестве опорной точки, от которой измеряется увеличение расстояния или уменьшение при вращении в обратную сторону.
Выбор инкрементных энкодеров шире, чем абсолютных датчиков, но это меняется со временем, так как величина дополнительных расходов для абсолютных устройств уменьшается. Кроме этого, во многих приложениях, в частности в робототехнике и автоматизированных системах, в меньшей степени допустимо, чтобы оборудование проходило процедуру калибровки при запуске, в таком случае датчики положения должны определять положение в той точке, где находятся.
Чаще всего на выходе инкрементных датчиков снимаются две последовательности импульсов A/B (серии импульсов, обычно со сдвигом фазы канала В относительно канала А на 90°). Это относится к двум или большему числу потоков импульсов низкого напряжения в квадратуре, которые меняются с высокого или низкого состояния при изменении положения. Обнаружение вращения обеспечивается определением, какой из потоков импульсов опережает другой, например, импульсы потока A по фазе на 90° опережают импульсы потока B импульсов или наоборот. На выходе абсолютных энкодеров наиболее часто встречается интерфейс SSI (англ. Synchronous Serial Interface, синхронно-последовательный интерфейс), который является протоколом цифрового обмена данными, различные сочетания битовых значений 0 или 1, которого указывают на абсолютное положение.
Существует ряд технологий, применяемых в энкодерах для измерения положения, наиболее распространенной из которых является оптическая. В оптическом энкодере луч света направлен сквозь или на диск с отверстиями, так что свет проходит или блокируется. Оптический детектор или считывающая головка воспринимают проходящий свет и генерируют соответствующий электрический сигнал. Из отверстий и серий меток на диске формируется специальный узор в виде оптической решетки, которая может использоваться для измерения угла или движения. Масштаб маркировки может быть очень мелким – вплоть до микрон – позволяя многим оптическим датчикам выдавать данные с высокой степенью точности.
Рис. 1 – Оптические энкодеры используют оптический датчик и диск для измерения угла
Корпусированный энкодер со сплошным валом является стандартным исполнением, в котором вал энкодера механически соединен с остальной системой. Вал энкодера, на котором закреплен оптический диск закреплен на подшипнике. Оптический диск, в свою очередь, работает в тесной связи с оптическими детекторами. Электрическое подключение обычно реализуется посредством многожильного кабеля, по которому осуществляется электропитание и снимаются выходные данные о положении датчика. Простой электрический интерфейс в сочетании с широкой распространенностью делает такие датчики легко интегрируемыми. Основной недостаток таких энкодеров заключается в том, что они неустойчивы к жестким условиям окружающей среды, в которой может присутствовать вибрация, удары, посторонние вещества или экстремальные температуры. Недостаточная или вообще отсутствующая сигнализация о сбое может привести в худшем случае к некорректному выводу данных положения или – в лучшем случае – сообщению об ошибке. Как правило, выдача ложного положения (без сообщения об ошибке) является гораздо более серьезным сбоем, чем отсутствие данных о положении, поскольку результат может быть катастрофическим.
При использовании датчиков большего диаметра или энкодеров в форме кольца в кратких руководствах часто задаются чрезвычайно жесткие допуски на установку считывающей головки на оптический диск или решетку для достижения заявленных результатов измерений. Такие бескорпусные кольцевые энкодеры особенно чувствительны к наличию посторонних веществ в рабочей зоне оптического датчика, учитывая малый размер оптических элементов, сопоставимый с величиной частиц пыли или грязи.
Неудивительно, что оптические энкодеры обычно не являются предпочтительным выбором для приложений с высокими требованиями к надежности или относящихся к сфере безопасности.
|
Преимущества |
|
Высокое разрешение, широкая доступность, возможна высокая точность |
| Недостатки |
| Хрупкий, чувствительный к посторонним веществам, катастрофические режимы сбоев, ограниченный диапазон температур (от -20 до +70 °C) |
В индуктивных энкодерах, часто называемых инкодерами, применены индукционные или трансформаторные принципы для измерения позиции мишени или ротора относительно статора. В таких датчиках используются те же физические принципы, что и в традиционных индуктивных устройствах, таких как бесщеточные резольверы или дифференциальные трансформаторы для измерения линейных перемещений, однако, электрический интерфейс индуктивных энкодеров подобен интерфейсу оптических датчиков положения – простой источник питания постоянного тока и цифровой электрический выходной сигнал.
Большинство традиционных резольверов выглядят скорее, как электрический двигатель – с медными обмотками на статоре, которые взаимодействуют с металлическим ротором или мишенью. Индуктивная или трансформаторная связь между обмотками статора изменяется в зависимости от положения ротора. Вместо конструкции в виде трансформаторных обмоток, в конструкции индуктивных энкодеров используются печатные платы ротора и статора, делая их менее громоздкими, более точными и при этом менее дорогостоящими в производстве.
В связи с их применением в военных самолетах во Второй мировой войне, резольверы и LVDT-датчики получили заслуженную репутацию точных, прочных и надежных устройств, поэтому они становятся автоматическим выбором для приложений с высокими требованиями к надежности и безопасности. Это связано с тем, что принципы работы трансформатора, как правило, не подвержены негативному влиянию неблагоприятных условий окружающей среды, включая наличие грязи, воды и льда.
Индуктивные энкодеры так же, как и оптические датчики, легко интегрируемы, так как требуют только подключения питания и на выходе обеспечивают цифровой сигнал, обозначающий положение. Это свидетельствует о том, что у инкодеров есть все преимущества резольверов, но ни одного из их недостатков.
Поскольку индуктивные энкодеры не содержат в своей конструкции хрупкие оптические компоненты, они не чувствительны к наличию посторонних веществ и работают не только в ограниченных температурных диапазонах. Кроме того, прецизионное измерение положения не зависит от точной соосности движущихся и неподвижных элементов, что обеспечивает широкие допуски при установке и работу без подшипников. Устранение необходимости в подшипниках привело к созданию тонких кольцевых конструкций с малым осевым габаритом и большим, полым валом, что упростило их интеграцию в оборудование с жесткими ограничениями по размеру или весу, такими как кардановы подвесы, роботизированные манипуляторы и приводы.
Рис 2 – Примеры индуктивных энкодеров
| Преимущества |
|
Высокое разрешение, точность, надежность, прочность, долговечность, отсутствие жестких требований к высокоточной соосности. |
| Недостатки |
|
Рабочий температурный диапазон (от -100 до + 125 ° C) шире, чем у оптических энкодеров, но не так широк, как у резольверов. |
Компания Zettlex разрабатывает и производит абсолютные и инкрементальные энкодеры.
Датчики серии IncOder компании Zettlex – это бесконтактные устройства для прецизионного измерения угла. Датчик IncOder состоит из двух частей: статор и ротор, каждая из которых имеет форму плоского кольца. Большое центральное отверстие позволяет легко пропускать валы, оптические волокна, трубы и кабели, размещать токосъёмники. Индуктивные угловые энкодеры серии IncOder не требуют точной механической установки, скорее можно сказать, что ротор и статор должны быть просто привинчены в конечное изделие.
Zettlex выпускает датчики положения в широком диапазоне форм и размеров, включая вращающиеся, кольцевые, линейные, 2-х и многоосевые. Диапазон измерений линейных датчиков – до 2700 мм. Вращающиеся устройства измеряют непрерывно все 360° или несколько оборотов. Кроме того, вращающиеся устройства используются в качестве энкодеров высокоскоростных двигателей или беспроводных преобразователей вращающего момента.
Как работают энкодеры | Энкодеры PCA
Что такое энкодер вала?
Датчик вала – это электромеханический преобразователь, который преобразует положение вращения в электронный сигнал, подходящий для передачи входных данных в широкий спектр электронных устройств управления.
Датчики валаиспользуются в различных механических приложениях. Ниже приведены лишь несколько примеров:
- Измерение длины исходного материала во время процесса намотки, а затем еще раз, когда материал разрезается по размеру для окончательного использования.
- Определение угловых положений при синхронизации движений машин, например, в упаковочных машинах.
- Мониторинг положения продукции на конвейере.
- Расположение делительных столов, кранов-штабелеров и т. Д.
- Отслеживание положения автоматизированных роботов и движений их рук.
- Некоторые из наиболее необычных приложений включают спутниковое слежение, анализ дорожного покрытия и исследования подвески автомобилей.
В 1981 году энкодеры PCA начали сборку инкрементальных энкодеров в Австралии с одним типом корпуса, который имел только два варианта вывода.Сегодня мы собираем пять стилей кузова.
Каждый из них доступен с различными размерами вала, вариантами выхода и способами соединения, что обеспечивает более 3500 различных вариантов модели. Вы можете просмотреть наш ассортимент инкрементальных энкодеров, щелкнув следующую ссылку:
Инкрементальные энкодеры – цельный вал
Кроме того, у нас есть большая библиотека инкрементных дисков с шагом от 1 до 100 000 на оборот. Когда мы получаем заказ, оптический диск и выходная плата устанавливаются в корпус подшипника.Готовый кодировщик обычно отправляется заказчику в течение семи дней с момента размещения заказа. Круглосуточная служба сборки также доступна для непредвиденных чрезвычайных ситуаций.
В чем разница между инкрементным и абсолютным энкодером?
Инкрементальные энкодерывыдают последовательный выходной поток прямоугольных сигналов при вращении вала. Для определения углового положения или направления вращения требуется внешняя электронная схема. Количество сигналов на оборот вала определяется выбором заказчика при оформлении заказа.
Абсолютные энкодерыобеспечивают параллельную структуру вывода, код которой дает прямое считывание углового положения вала, имеется оптическое считывающее устройство для каждой из дорожек. Все диски отформатированы кодом Грея; чтобы гарантировать отсутствие ошибок чтения, этот код имеет только одно изменение бита между делениями. E-PROM внутри энкодера используются для программирования отдельного выходного кода и добавления направления.
Принцип считывания инкрементального энкодера
Большинство наших энкодеров оснащено уникальными пластиковыми дисками, изготовленными на очень специализированном оборудовании.Эти диски имеют малую массу, отличную ударопрочность и могут экономично воспроизводиться, что делает наши кодировщики более пригодными для суровых условий окружающей среды, чем кодеры, обычно использующие стеклянные или тонкие металлические диски.
Когда диск вращается, он прерывает предполагаемый световой путь, отправляя сигналы на триггер Шмитта, а затем на конечный выходной усилитель. За исключением моделей с очень низким приращением световой путь имеет неподвижную маску или сетку с тем же рисунком приращения, что и диск. Это известно как принцип муара “бахрома”.Сетка разделена на две половины со смещением между ними 90 °, обеспечивая квадратурную функцию, необходимую для управления направлением.
Инкрементальные энкодеры
Инкрементальные энкодеры являются наиболее распространенным типом. У них есть только одна градуированная дорожка по периметру диска и последовательность выходных импульсов, что делает их внутренне намного проще, чем абсолютные энкодеры, и поэтому они немного более экономичны.
Главное, что следует учитывать, – это то, что фактическое положение вала – это предполагаемая взаимосвязь между валом и соответствующим внешним счетным оборудованием.Если питание отключено, обычно необходимо обеспечить средство сброса соответствующей схемы в известную контрольную точку. В каждом кодировщике доступно до трех независимых оптических каналов. Кроме того, для каждого канала доступно шесть линий выходного сигнала.
Выходные сигналы обозначаются как «A», «B» и «O». Выходы «A» и «B» настроены со смещением на 90 °, обычно называемым квадратурой. Соответствующее оборудование для подсчета отслеживает эту взаимосвязь и определяет направление вала.Эта функция предоставляет информацию о повышении / понижении для счетчиков и с помощью правильной схемы предотвращает неправильный подсчет в приложениях, где вибрация вызывает проблемы.
Квадратурное соотношение в сочетании с внешней схемой также может обеспечить возможность умножения выходных сигналов на четыре. Таким образом, модель на 5000 приращений может обеспечить 20 000 приращений за оборот.
Выход «O» обеспечивает один сигнал на каждый оборот вала. Сигнал используется в качестве точной опорной точки для согласования последовательной последовательности импульсов с известным механическим местоположением.Чтобы использовать это эффективно, необходимо установить энкодер с помощью зажимного монтажного кронштейна или других средств, которые позволят поворачивать корпус энкодера.
Можно выбрать состояние (высокий или низкий) «O» или выходного импульса. Однако важно отметить, что не обязательно существует какое-либо фиксированное соотношение между краями выхода «O» и дополнительных каналов. Известная взаимосвязь может быть предоставлена, если указана в выбранном номере детали. ПРИМЕЧАНИЕ: эта опция недоступна для некоторых моделей с большим шагом.
Абсолютные энкодеры
Эти кодировщики имеют многодорожечный оптический диск с серым кодом, который имеет одну дорожку для каждого «бита» заявленного разрешения. Этот код имеет то преимущество, что при каждом изменении выходного кода изменяется только один «бит». Окончательный выходной код, серый, двоичный или двоично-десятичный, а также направление вращения вала для увеличения выходного значения в большинстве моделей программируются в E-PROM.
Каждое отдельное приращение формирует свой собственный уникальный код на параллельной выходной шине. Поэтому, даже если питание пропадает, после восстановления положение вала сразу становится известно без какой-либо процедуры сброса, как это требуется для инкрементальных энкодеров.
Главное соображение заключается в том, что стандартные абсолютные энкодеры предоставляют эту функцию только для одного оборота вала. Поэтому их использование ограничено синхронизацией оборудования на основе цикла 360 °. Если требуется больше оборотов, необходимо использовать какую-либо форму механического редуктора или выбрать один из наших многооборотных абсолютных энкодеров. Этот тип имеет внутреннее механическое устройство, которое управляет несколькими дисками с абсолютным кодом.
Доступны многооборотные абсолютные энкодерыс разрешением до 30 бит, это достигается за счет механической конструкции, которая имеет 14 бит (16 384) оборотов вала и 16 бит (65 536) на каждый оборот вала.Энкодеры доступны как с параллельными, так и с последовательными выходами; Последовательные протоколы сегодня являются предпочтительным вариантом, такой подход значительно сокращает объем полевой проводки и количество портов ввода / вывода устройств управления.
Энкодерыдоступны со всеми наиболее распространенными промышленными интерфейсами, DeviceNET, Ethernet в нескольких форматах, CanOPEN, InterBUS, ProfiBUS-DP и SSI, самый простой из протоколов. Посетите наш веб-сайт для получения полной технической информации по каждому интерфейсу.
Выходные цепи энкодера
В прошлом был ряд из пяти различных вариантов вывода, доступных для некоторых серий, обеспечивающих все типы входных структур, к которым могут быть подключены энкодеры.Сегодня большинство наших энкодеров имеют один и тот же выходной драйвер независимо от номинального напряжения. В энкодерах, рассчитанных на работу с напряжением 5 В, просто удален диод защиты от обратного напряжения, чтобы логическая «1» была как можно ближе к шине +5 В.
Максимальная выходная частота обычно составляет 300 кГц, но зависит от длины соединительного кабеля, поскольку по мере увеличения емкости линии время нарастания и спада прямоугольных сигналов также увеличивается.
Толкать и тянуть
В настоящее время это наиболее широко используемая конфигурация выхода, которая обычно работает при любом напряжении от 11 до 30 вольт.Основная особенность этой структуры заключается в том, что ее можно использовать для переключения входных цепей NPN или PNP, тем самым сокращая запасы запчастей, если оба типа требуются на одной площадке.
Большинство наших энкодеров сегодня сделаны только с двухтактным выходом, если требуется действительно открытый коллектор или выход требуется для переключения напряжения, отличного от напряжения питания энкодера, это может быть достигнуто с помощью одного внешнего диода.
NPN или сток
Имеет переключающее действие 40 мА между выходным сигналом и питанием 0 В.Между выходом и линией питания + Вольт установлены подтягивающие резисторы.
PNP или источник тока
Имеет переключающее действие 40 мА между источником + Вольт и выходом. Понижающие резисторы устанавливаются между выходом и линией питания 0 В.
Линейный драйвер
В нем используется схема вывода двухтактного линейного драйвера, которая обеспечивает выходной сигнал от 5 до 15 В, 40 мА, позволяющий прокладывать кабель длиной до 100 метров.
Этот тип имеет самую высокую частотную характеристику и лучшую помехозащищенность при условии, что установка оснащена дифференциальным линейным приемником. Для использования этой функции необходимо выбрать параметры выходного сигнала, обеспечивающие как истинный, так и дополнительный сигнал.
Только 5 В
Выходная схема по существу такая же, как и схема Push Pull, показанная выше, но в ней удален диод защиты от обратного напряжения для работы в режиме TTL 5 В.
ПРИМЕЧАНИЕ. Информация о выходе и напряжении является типичной; конкретные сведения о выбранной вами модели см. В таблицах данных отдельных серий.
ПОЖАЛУЙСТА, ОБРАТИТЕ ВНИМАНИЕ: были предприняты все усилия, чтобы информация, содержащаяся в этом сообщении блога, была верной на момент создания. Однако у нас есть постоянная программа развития и обновления. Обычно это не влияет на приложения, однако текущая информация всегда доступна по запросу. Ни PCA, ни наши основные поставщики не несут никакой ответственности за неправильное использование продукта или ответственность за любой ущерб, который он может нанести любой другой части вашего оборудования.
Обзор положения и скорости энкодера двигателяЧто такое энкодер двигателя?
Кодировщик двигателя – это датчик угла поворота, установленный на электродвигателе, который выдает сигналы обратной связи с обратной связью, отслеживая скорость и / или положение вала двигателя. Доступен широкий спектр конфигураций энкодеров двигателя, таких как инкрементальный или абсолютный, оптический или магнитный, с валом или ступицей / полым валом и другие. Тип используемого энкодера двигателя зависит от ряда факторов, в частности от типа двигателя, приложения, требующего обратной связи с обратной связью, и требуемой конфигурации монтажа.
Как указать кодировщик двигателя
При выборе компонентов для системы управления с обратной связью выбор датчика двигателя в первую очередь определяется типом двигателя, выбранным в приложении. Наиболее распространенные типы двигателей:
Энкодеры для асинхронных двигателей
Асинхронные двигателипеременного тока являются популярным выбором для систем управления общей автоматизацией, поскольку они экономичны и надежны. Энкодеры двигателей используются для более точного управления скоростью в приложениях, использующих двигатели переменного тока, и часто требуется более надежная защита IP, параметры ударов и вибрации.
Энкодеры серводвигателей
Энкодеры серводвигателей(энкодеры двигателей с постоянными магнитами) предлагают системы управления с обратной связью с обратной связью для приложений, требующих более высокой точности и точности, и не таких надежных, как асинхронные двигатели переменного тока. Энкодер двигателя, используемый в серводвигателях, может быть модульным, инкрементальным или абсолютным, в зависимости от требуемого уровня разрешения и точности.
Энкодеры шаговых двигателей
Шаговые двигателиэкономичны, точны и обычно используются в системах с открытым контуром.В системах, использующих шаговые двигатели, где требуется регулирование скорости, на этот двигатель часто устанавливается инкрементальный энкодер, который позволяет системе шагового двигателя достичь обратной связи с обратной связью. Энкодеры шаговых двигателей также могут использоваться в некоторых приложениях, чтобы обеспечить улучшенное управление шаговыми двигателями, обеспечивая точную обратную связь о положении вала двигателя по отношению к углу шага.
Кодеры двигателей постоянного тока
Энкодеры двигателей постоянного токаиспользуются для обратной связи по управлению скоростью в двигателях постоянного тока, где якорь или ротор с намотанными проводами вращается внутри магнитного поля, созданного статором.Энкодер двигателя постоянного тока обеспечивает механизм для измерения скорости ротора и обеспечивает обратную связь с приводом с обратной связью для точного управления скоростью.
Варианты монтажа энкодера двигателя
Следующим фактором, влияющим на выбор энкодера двигателя, является вариант монтажа, наиболее распространенными вариантами являются:
- Датчики двигателя с валом: Использует метод сцепления для соединения вала энкодера двигателя с валом двигателя. Муфта обеспечивает механическую и электрическую изоляцию от вала двигателя, но может увеличить стоимость за счет муфты и большей длины вала, необходимой для установки энкодера двигателя .
- Датчики со ступицей / полым валом: энкодеры с полым валом крепятся непосредственно к валу двигателя с помощью подпружиненного троса.Этот метод прост в установке и не требует центровки валов, но необходимо соблюдать надлежащую осторожность, чтобы обеспечить электрическую изоляцию. Датчики двигателя без подшипников
- : этот вариант монтажа, также известный как кольцевой монтаж, состоит из узла датчика в форме кольца, которое устанавливается на лицевой стороне двигателя, и магнитного колеса, которое устанавливается на валу двигателя. Этот тип монтажной конфигурации энкодера двигателя в основном используется в тяжелых условиях, таких как бумага, сталь и краны.
Типы технологии кодирования
Приложение, в котором используется датчик двигателя, будет определять технологию датчика двигателя, которую необходимо использовать.Доступны два основных типа технологий энкодеров двигателя:
- Инкрементальные энкодеры: Выход инкрементального энкодера двигателя используется для управления скоростью вала двигателя. Узнайте больше о технологии инкрементального энкодера. Абсолютные энкодеры
- : Выходные данные абсолютного энкодера двигателя указывают как движение, так и положение вала двигателя. Абсолютные энкодеры двигателя чаще всего используются в серводвигателях в приложениях, где требуется точность положения. Узнать больше о технологии абсолютного энкодера .
Как работают оптические энкодеры
Однодорожечная шкала
Шкала по существу представляет собой единственную дорожку контрастных линий полной ширины с номинальным периодом 30 мкм. Отсутствие нескольких параллельных гусениц дает важную защиту от ошибок рыскания и гораздо больший боковой допуск в положении головы.
Получение изображения
Масштаб отображается через асферическую линзу, которая сводит к минимуму искажения, на настраиваемую матрицу детекторов, разработанную специально для RESOLUTE.Оптическая схема с загнутым световым лучом, но с прямым отображением, очень компактна, но стабильна, что обеспечивает точность, необходимую для превосходной метрологии.
Декодирование и анализ данных
После захвата детектором изображение передается через аналого-цифровой преобразователь (АЦП) в мощный цифровой сигнальный процессор (DSP). Затем специально разработанные алгоритмы получают истинное абсолютное, но относительно грубое положение из кода, встроенного в шкалу. Этот процесс проверяется, и вносятся исправления с помощью дополнительных алгоритмов в DSP, которые используют избыточность и преднамеренные ограничения в коде масштабирования.Между тем, другие процедуры вычисляют точное положение с очень высоким разрешением, которое затем комбинируется с грубым положением, чтобы обеспечить действительно абсолютное местоположение с очень высоким разрешением.
Заключительные проверки и вывод данных
После окончательной процедуры проверки ошибок эта информация загружается в соответствующий протокол в контроллер в виде чистого последовательного слова, представляющего положение с точностью до 1 нм. Защита от электрических помех обеспечивается добавлением циклического контроля избыточности (CRC).Весь процесс может занять всего несколько микросекунд и повторяться до 25 000 раз в секунду. С помощью различных методов, включая регулировку продолжительности световой вспышки в зависимости от скорости оси, эта производительность достигается на скорости до 100 м / с, при этом, что особенно важно, сохраняется исключительно низкий позиционный джиттер при более низких рабочих скоростях.
И результат …
Энкодер с большими допусками на установку: RESOLUTE допускает ± 0,5 ° по рысканью, тангажу и крену и впечатляющую высоту ± 150 мкм.Между тем, большая площадь оптики и усовершенствованные процедуры исправления ошибок обеспечивают превосходную устойчивость к оптическому загрязнению, как твердым частицам, так и жирным пятнам. Все это при сохранении разрешения 1 нм при скорости 100 м / с: RESOLUTE – это ответ на самый сложный вызов.
Оптические и магнитные, инкрементальные и поворотные
Что такое кодировщик?
Энкодер – это датчик механического движения, который генерирует цифровые сигналы в ответ на движение.В качестве электромеханического устройства кодировщик может предоставлять пользователям системы управления движением информацию о положении, скорости и направлении. Есть два разных типа энкодеров: линейные и поворотные. Линейный энкодер реагирует на движение по траектории, а угловой энкодер реагирует на вращательное движение. Кодировщик обычно классифицируется по его выходным данным. Инкрементальный энкодер генерирует последовательность импульсов, которая может использоваться для определения положения и скорости. Абсолютный энкодер генерирует уникальные битовые конфигурации для прямого отслеживания положения.
Блок-схема энкодеров
Основные типы энкодеров
Линейные и угловые энкодеры делятся на два основных типа: абсолютные энкодеры и инкрементальные энкодеры. Конструкция этих двух типов кодировщиков очень похожа; однако они различаются по физическим свойствам и интерпретации движения.
Инкрементальный энкодер
Односторонний энкодер
Инкрементальный угловой энкодер также называется квадратурным энкодером.В энкодере этого типа используются датчики, которые используют оптический, механический или магнитный счетчик индекса для измерения углов.
Как работают инкрементальные энкодеры?
В инкрементальных датчиках вращения используется прозрачный диск, который содержит непрозрачные секции, равномерно распределенные для определения движения. Светоизлучающий диод пропускает через стеклянный диск и обнаруживается фотодетектором. Это заставляет энкодер генерировать последовательность импульсов с равным интервалом при вращении.Выходные данные инкрементальных энкодеров измеряются в импульсах на оборот, которые используются для отслеживания положения или определения скорости.
Одноканальный выход обычно используется в приложениях, в которых направление движения не имеет значения. В случаях, когда важно определение направления, используется двухканальный квадратурный выход. Два канала, A и B, обычно на 90 электрических градусов не совпадают по фазе, и электронные компоненты определяют направление на основе фазового соотношения между двумя каналами.Положение инкрементального энкодера определяется суммированием всех импульсов счетчиком.
Снижение инкрементального энкодера – это потеря счета, которая происходит во время потери мощности. При перезапуске оборудование должно быть привязано к исходному положению для повторной инициализации счетчика. Однако есть некоторые инкрементальные энкодеры, такие как те, что продаются в Anaheim Automation, которые оснащены третьим каналом, называемым индексным каналом. Индексный канал генерирует одиночный импульс сигнала на оборот вала энкодера и часто используется в качестве опорного маркера.Затем контрольный маркер обозначается как начальная позиция, с которой можно возобновить подсчет или отслеживание позиции.
ПРИМЕЧАНИЕ: Инкрементальные угловые энкодеры не так точны, как абсолютные угловые энкодеры, из-за возможности помех или неправильного считывания.
Абсолютный энкодер
Абсолютный энкодер содержит компоненты, которые также присутствуют в инкрементальных энкодерах. В них реализован фотодетектор и светодиодный источник света, но вместо диска с равномерно разнесенными линиями на диске абсолютный энкодер использует диск с узорами концентрических кругов.
Как работают абсолютные энкодеры?
Абсолютные энкодеры используют неподвижную маску между фотодетектором и диском энкодера, как показано ниже. Выходной сигнал, генерируемый абсолютным энкодером, представлен в цифровых битах, которые соответствуют уникальной позиции. Конфигурация бита создается светом, который принимается фотодетектором при вращении диска. Полученная световая конфигурация преобразуется в код серого. В результате каждая позиция имеет свою уникальную битовую конфигурацию.
Линейный энкодер
Линейный энкодер – это датчик, преобразователь или считывающая головка, связанные со шкалой, которая кодирует положение. Датчик считывает шкалу и преобразует положение в аналоговый или цифровой сигнал, который преобразуется в цифровую индикацию. Движение определяется по изменению положения во времени. Этот тип метода работает как с оптическим, так и с магнитным линейным энкодером. Однако их отличают физические свойства.
Как работают оптические линейные энкодеры?
Источник света и линза создают параллельный луч света, который проходит через четыре окна сканирующей сетки. Четыре окна сканирования смещены на 90 градусов. Затем свет проходит через стеклянную шкалу и обнаруживается фотодатчиками. Затем шкала преобразует обнаруженный световой луч при перемещении сканирующего блока. Обнаружение света фотодатчиком дает на выходе синусоидальную волну.Затем система линейного энкодера объединяет смещенные сигналы для создания двух синусоидальных выходных сигналов, которые симметричны, но сдвинуты по фазе на 90 градусов друг от друга. Опорный сигнал создается, когда пятый узор на сканирующей сетке выравнивается с идентичным рисунком на шкале.
Как работает линейный энкодер?
Система линейного энкодера использует считывающую головку магнитного датчика и магнитную шкалу для создания TTL или аналогового выхода для каналов A и B.Когда магнитный датчик проходит вдоль магнитной шкалы, датчик определяет изменение магнитного поля и выдает сигнал. Эта частота выходного сигнала пропорциональна скорости измерения и перемещению датчика. Поскольку линейный энкодер обнаруживает изменение магнитного поля, интерференция света, масла, пыли и мусора не влияет на этот тип системы; поэтому они обеспечивают высокую надежность в суровых условиях.
Магнитный датчик угла поворота
Магнитный энкодер состоит из двух частей: ротора и датчика.Ротор вращается вместе с валом и содержит чередующиеся равномерно расположенные северный и южный полюса по своей окружности. Датчик обнаруживает эти небольшие сдвиги в положениях N >> S и S >> N. Существует множество методов обнаружения изменений магнитного поля, но в энкодерах используются два основных типа: эффект Холла и магниторезистивный. Датчики на эффекте Холла работают, обнаруживая изменение напряжения по магнитному отклонению электронов. Магниторезистивные датчики обнаруживают изменение сопротивления, вызванное магнитным полем.
Обнаружение на эффекте Холла
Датчик вырабатывает и обрабатывает сигналы на эффекте Холла, создавая квадратурный сигнал, как это обычно бывает с оптическими энкодерами. Выходной сигнал генерируется путем измерения распределения магнитного потока по поверхности чипа. Точность вывода зависит от радиального расположения ИС по отношению к целевому магниту. Поверхность стружки должна быть параллельна магниту, чтобы воздушный зазор между магнитом и датчиком был одинаковым по всей поверхности датчика.
Магнитные энкодеры избегают трех уязвимостей, с которыми сталкиваются оптические энкодеры:
• Отказы пломбы, которые допускают попадание загрязняющих веществ
• Оптический диск может разбиться при вибрации или ударе
• Отказ подшипников
Магнитные устройства, спроектированные эффективно, исключают первые два режима отказа а также дают возможность снизить количество отказов подшипников.Магнитные энкодеры не делают ошибок из-за загрязнения, потому что их датчики обнаруживают изменения магнитных полей, встроенных в ротор, а масло, грязь и вода не влияют на эти магнитные поля.
Датчики на эффекте Холлаобычно имеют более низкую стоимость и менее точны, чем магниторезистивные датчики. Это означает, что датчики на эффекте Холла, когда они используются в кодировщике, производят большее «дрожание» или ошибку в сигнале, вызванную отклонениями датчика.
Коммутационные энкодеры
Коммутационный энкодер содержит те же основные компоненты, что и инкрементальные энкодеры, но с добавлением коммутационных дорожек вдоль внешнего края диска для вывода U / V / W.
Как работают коммутационные кодеры?
Коммутационные энкодерыиспользуют прозрачный диск с непрозрачными секциями, равномерно разнесенными для определения движения. Светоизлучающий диод пропускает через стеклянный диск и обнаруживается фотодетектором. Это заставляет энкодер генерировать последовательность импульсов с равным интервалом при вращении. Выходные данные инкрементальных энкодеров измеряются в импульсах на оборот, которые используются для отслеживания положения или определения скорости.
Внешняя часть диска энкодера включает в себя коммутационные дорожки, которые предоставляют контроллеру информацию о точном положении полюсов двигателя, так что на двигатель может подаваться соответствующий входной сигнал контроллера. Коммутационные дорожки энкодера считывают положение двигателя и инструктируют контроллер о том, как обеспечить эффективный и правильный ток на двигатель, чтобы вызвать вращение. Коммутационный выход для U / V / W может быть в форме дифференциального выхода или открытого коллектора (зависит от производителя).
Как управляются энкодеры?
Датчикиуправляются вращением вала, на котором они установлены. Вал входит в контакт со ступицей, которая находится внутри энкодера. Когда вал вращается, он заставляет диск с прозрачными и сплошными линиями вращаться по схеме энкодера. Схема энкодера содержит светодиод, который фиксируется фотоэлектрическим диодом и выдает импульсы пользователю. Скорость вращения диска будет зависеть от скорости вала, к которому подключен энкодер.Линии оптических и магнитных энкодеров Anaheim Automation питаются от одного источника питания +5 В постоянного тока и могут потреблять и отдавать 8 мА каждый.
Физические свойства
Линейные энкодеры
Ключевыми компонентами линейного энкодера являются блок сканирования, датчик, преобразователь или считывающая головка, соединенные с пропускающей или отражающей шкалой, которая кодирует положение. Шкала линейного энкодера обычно изготавливается из стекла и крепится к опоре, а блок сканирования содержит источник света, фотоэлементы и вторую стеклянную деталь, называемую сканирующей сеткой.В совокупности линейный энкодер может преобразовывать движение в цифровые или аналоговые сигналы для определения изменения положения с течением времени.
Датчики вращения
Ключевыми компонентами энкодера являются диск, источники света и детекторы, а также электроника. Диск содержит уникальный узор из концентрических вытравленных кругов с чередованием непрозрачных и прозрачных сегментов. Этот шаблон обеспечивает уникальные битовые конфигурации и используется для назначения определенных позиций.Для каждого концентрического кольца поворотного энкодера есть источник света и детектор света, которые идентифицируют линии, нанесенные на диск. Электроника состоит из устройства вывода, которое принимает сигнал, полученный от датчика (источника света / детектора), для обеспечения обратной связи по положению и / или скорости. Все эти компоненты заключены в единый корпус.
Инкрементальные энкодеры
Кодер дифференциального типа
Ключевыми компонентами инкрементального энкодера являются стеклянный диск, светодиод (светоизлучающий диод) и фотодетектор.Прозрачный диск содержит непрозрачные секции, которые равномерно разнесены для отражения света, в то время как прозрачные секции позволяют свету проходить через них, как показано на Рисунке 2 ниже. В оптическом кодировщике используется светоизлучающий диод, который пропускает свет через прозрачные части диска. Проходящий свет воспринимается фотодетектором, который выдает электрический сигнал.
Где используются энкодеры?
Кодерыстали жизненно важным источником для многих приложений, требующих обратной связи.Независимо от того, связано ли приложение со скоростью, направлением или расстоянием, широкие возможности кодировщика позволяют пользователям использовать эту информацию для точного управления. С появлением более высокого разрешения, надежности и более низкой стоимости кодеры становятся предпочтительной технологией во все большем количестве областей. Сегодня приложения для кодирования повсюду. Они используются в принтерах, автоматике, медицинских сканерах и научном оборудовании.
Линейка экономичных кодировщиков Anaheim Automation является разумным выбором для приложений, требующих управления с обратной связью.Компания Anaheim Automation заказывает линейку энкодеров разнообразно: промышленные компании, эксплуатирующие или проектирующие автоматизированное оборудование, включающее обработку пищевых продуктов, этикетирование, резку по длине, конвейеры, погрузочно-разгрузочные работы, робототехнику, медицинскую диагностику и станки с ЧПУ.
Энкодеры используются во многих отраслях промышленности
Энкодеры стали важным компонентом приложений во многих различных отраслях промышленности. Ниже приводится неполный список отраслей, в которых используются кодировщики:
• Автомобильная промышленность – В автомобильной промышленности используются энкодеры, поскольку датчики механического движения могут применяться для управления скоростью.
• Бытовая электроника и офисное оборудование – В индустрии бытовой электроники кодировщики широко используются в офисном оборудовании, таком как сканирующее оборудование на базе ПК, принтеры и сканеры.
• Industrial – В промышленной индустрии энкодеры используются в этикетировочных машинах, упаковке и станках с одно- и многоосевыми контроллерами двигателей. Энкодеры также можно найти в системе управления станками с ЧПУ.
• Медицина – В медицинской промышленности энкодеры используются в медицинских сканерах, микроскопическом или наноскопическом управлении движением автоматических устройств и дозирующих насосах.
• Военные – Военные также используют кодеры для позиционирования антенн.
• Scientific Instruments – Энкодеры используются в научном оборудовании для позиционирования телескопа обсерватории.
Приложения для энкодеров
Энкодер может использоваться в приложениях, требующих обратной связи по положению, скорости, расстоянию и т. Д. Примеры, перечисленные ниже, иллюстрируют широкие возможности и реализации энкодера:
• Робототехника
• Этикетировочные машины
• Медицинское оборудование
• Текстиль
• Сверлильные станки
• Обратная связь двигателя
• Сборочные машины
• Упаковка
• Системы индикации X и Y
• Принтеры
• Испытательные машины
• Станки с ЧПУ
Как выбрать кодировщик
При выборе правильного кодировщика необходимо учитывать несколько важных критериев:
1.Выход
2. Желаемое разрешение (CPR)
3. Шум и длина кабеля
4. Индексный канал
5. Крышка / основание
Выход
Вывод зависит от требований приложения. Есть две формы вывода: инкрементная и абсолютная. Формы инкрементального вывода принимают форму выходных сигналов прямоугольной формы. Для приложений, требующих инкрементального энкодера, выходной сигнал равен нулю или питающему напряжению. Выходной сигнал инкрементального энкодера всегда представляет собой прямоугольную волну из-за переключения высокого (значение входного напряжения) и низкого (нулевого) значения сигнала.Абсолютные энкодеры работают так же, как инкрементальные энкодеры, но имеют другие методы вывода. Разрешение абсолютного энкодера описывается в битах. Выходные данные абсолютных энкодеров относятся к его положению в виде цифрового слова. Вместо непрерывного потока импульсов, наблюдаемого инкрементными энкодерами, абсолютные энкодеры выводят уникальное слово для каждой позиции в виде битов. Абсолютный энкодер, эквивалентный 1024 импульсам на оборот, имеет 10 бит (210 = 1024).
Желаемое разрешение (CPR)
Разрешение инкрементальных энкодеров часто описывается в количестве циклов на оборот (CPR). Циклов на оборот – это количество выходных импульсов на полный оборот диска энкодера. Например, энкодер с разрешением 1000 означает, что за один полный оборот энкодера генерируется 1000 импульсов.
Уровень шума и длина кабеля
При выборе правильного кодировщика для любого приложения пользователь также должен учитывать шум и длину кабеля.Более длинные кабели более чувствительны к шуму. Для правильной работы системы крайне важно использовать кабели соответствующей длины. Рекомендуется использовать экранированные кабели с витой парой, желательно с низким значением емкости. Номинальное значение емкости обычно выражается в емкости на фут. Этот рейтинг важен для четко определенных прямоугольных импульсов на выходе энкодера, а не для «зазубренных» или «зубчатых» импульсов из-за помех.
Индексный канал
Индексный канал – это дополнительный выходной канал, который обеспечивает один выходной импульс на оборот.Этот импульс позволяет пользователю отслеживать положение и устанавливает контрольную точку. Этот выходной канал чрезвычайно важен для инкрементальных энкодеров при отключении питания. В случаях сбоя питания последний устойчивый индексный канал может использоваться как опорный маркер для точки перезапуска. Следовательно, когда такое происходит, индексный канал может оказаться весьма ценным в приложениях, использующих инкрементальные кодеры. Абсолютные энкодеры не имеют проблем с потерей отслеживания позиции в ситуациях потери мощности, потому что каждой позиции назначается уникальная битовая конфигурация.
Крышка / основание
Варианты крышки и основания рассматриваются с учетом требований конкретного приложения. Закрытые крышки помогают защитить кодировщик от частиц пыли. Варианты основания играют значительную роль в условиях сильной вибрации. Такими вариантами монтажа являются переносные клеи, которые приклеиваются непосредственно с обратной стороны энкодера к монтажной поверхности, формованные ушки для прямого монтажа. Anaheim Automation также предлагает различные варианты основания для монтажа.
Anaheim Automation предлагает широкий выбор вариантов крышки и основания для удовлетворения ваших потребностей.
Варианты крышки:E-вариант: закрытая крышка H-вариант: диаметр отверстия
Варианты основания:
3-вариант: все пять диаметров отверстий становятся .125 Вариант A: добавляет выравнивающий упор
G- Опция: формованные уши Опция R: переходная пластина с 3 прорезями Опция T: клей для переноса
Как установить кодировщик
После выбора подходящего двигателя важно знать, как его правильно установить.Установка каждого энкодера зависит от его крепления или варианта основания. Если энкодер должен быть установлен на валу двигателя, то можно использовать центрирующий инструмент для совмещения отверстия энкодера с валом. Различные варианты монтажа имеют разную функциональность. Опция R допускает ход движения на +/- 15 градусов, при котором энкодер может вращаться вперед и назад. Однако в варианте T используется клей для приклеивания к задней части двигателя.
Пошаговые инструкции по установке кодировщика Anaheim Automation см. В наших видеоуроках здесь.Anaheim Automation также предоставляет возможность сумматора кодировщика, где мы без проблем монтируем кодировщик для вас!
Преимущества энкодера
– Высокая надежность и точность
– Недорогая обратная связь
– Высокое разрешение
– Интегрированная электроника
– Предохранители оптических и цифровых технологий
– Могут быть включены в существующие приложения
– Компактный размер
Недостатки энкодера
– подвержен магнитным или радиопомехам (магнитные энкодеры)
– Прямые помехи от источника света (оптические энкодеры)
– Восприимчив к грязи, маслам и пыли
Поиск и устранение неисправностей
ПОЖАЛУЙСТА, ОБРАТИТЕ ВНИМАНИЕ: Техническая помощь в отношении линейки энкодеров, а также всей продукции, производимой или распространяемой Anaheim Automation, предоставляется бесплатно.Эта помощь предлагается, чтобы помочь клиенту в выборе продуктов Anaheim Automation для конкретного применения. Однако любые предложения по выбору, расценкам или применению кодировщика или любого другого продукта, предлагаемые персоналом Anaheim Automation, его представителями или дистрибьюторами, предназначены только для оказания помощи заказчику. Во всех случаях ответственность за определение пригодности специального кодировщика для конкретной конструкции системы лежит исключительно на заказчике. Несмотря на то, что прилагаются все усилия, чтобы дать надежные рекомендации относительно линейки продуктов Encoder, а также других продуктов для управления движением, а также для точного создания технических данных и иллюстраций, такие советы и документы предназначены только для справки и могут быть изменены без предварительного уведомления.
Проблема: Нет вывода
Решение: Отсутствие вывода может быть результатом различных факторов. Могут быть предприняты шаги для обеспечения правильной работы кодировщика. Никакое механическое движение не приводит к выходу сигнала с энкодера. Чтобы исправить эту проблему, посмотрите, вращается ли энкодер. Убедитесь, что все перекрутки между кодировщиком и драйвером / контроллером выполнены правильно и что используется соответствующий источник напряжения. Плохие соединения или неподходящее напряжение могут нарушить нормальную работу кодировщика.Наконец, убедитесь, что в вашем приложении используется правильный тип сигнала (например, открытый коллектор, подтягивающий, линейный драйвер или двухтактный). Если проблема не исчезнет, поменяйте кодировщики местами, если это возможно, чтобы определить, является ли проблема кодировщиком.
Проблема: Невозможно найти индексный импульс
Решение: Индексный импульс или опорный маркер – это выход энкодера один раз на оборот, и его лучше всего найти с помощью осциллографа. Убедитесь, что вся проводка между кодировщиком и драйвером / контроллером правильная и используется соответствующий источник напряжения.Если это не решит проблему, попробуйте снизить частоту вращения двигателя, так как драйвер / контроллер может быть не в состоянии идентифицировать индексный импульс при очень высоких значениях частоты вращения.
Проблема: Выходной счетчик указывает неправильное направление
Решение: Если выходной счетчик указывает неправильное направление, проверьте конфигурацию провода. Посмотрите, не перепутаны ли какие-либо провода. Если они поменяны местами, просто поменяйте провода местами.
ПРИМЕЧАНИЕ: Если ваше приложение использует индекс, реверсирование конфигурации проводов приводит к изменению опорного выравнивания.Если да, внесите соответствующие изменения в свое приложение.
Проблема: Энкодер не вращается
Решение: Когда энкодеры находятся на открытом воздухе, частицы пыли и мусора могут накапливаться вокруг вала. Просто очистите открытую область и убедитесь, что нет предметов, препятствующих вращению кодировщика.
Проблема: Помехи
Решение: Для повышения помехоустойчивости кодировщиков настоятельно рекомендуется, чтобы никакое другое электрическое оборудование не находилось поблизости или на достаточном расстоянии.Кабели энкодера также должны быть экранированы, а соответствующие провода должны быть заземлены, чтобы минимизировать электрические помехи.
Проблема: Искаженный или неправильный выходной сигнал
Решение: Искаженный или неправильный выходной сигнал может быть любой комбинацией слабых соединений проводки, выходного сигнала энкодера, несовместимого с драйвером / контроллером, электрических шумов или неправильного выравнивания. Проверьте соединения проводов, проблемы совместимости с кодировщиком и драйвером / контроллером, совмещение кодировщика и вала, чтобы решить эту проблему.-1 = дюйм на импульс
Глоссарий
Абсолютный энкодер – обеспечивает положение вала в конфигурации долота и может поддерживать или обеспечивать абсолютное положение даже после случаев потери / отказа питания.
Точность – разница в расстоянии между теоретическим и фактическим положением.
Циклов на оборот (CPR) – Циклов на оборот – это количество выходных импульсов на полный оборот диска энкодера.
Энкодер – это датчик механического движения, который генерирует цифровые сигналы в ответ на движение.
Инкрементальный энкодер – устройство, которое выдает последовательность импульсов в ответ на механическое движение. Выходной сигнал этого кодировщика имеет форму прямоугольной волны.
Индекс – отдельный выходной канал, выдающий один импульс на оборот вала. Его можно использовать для установите ориентир или маркер для исходной позиции.
Интерполяция – метод увеличения разрешающей способности энкодера. Этот метод позволяет кодировщику создавать выходные данные с более высоким разрешением без увеличения общего размера диска и кодировщика.
Line Driver – это исходный вывод. Это означает, что в состоянии «ON» драйвер линии будет подавать Vcc, а в состоянии «OFF» драйвер будет плавать. Для приложений линейного драйвера требуется вход с понижением напряжения.
Открытый коллектор – выход втекающего типа. В состоянии «ВЫКЛ.» Открытый коллектор будет заземлен, а в состоянии «ВКЛ.» Открытый коллектор будет плавать. Для приложений с открытым коллектором требуется исходный код.
Импульсов на оборот (PPR) – общее количество импульсов, произведенных за полный оборот вала энкодера.
Двухтактный – это комбинация линейного драйвера и открытого коллектора. В состоянии «ВЫКЛ.» Он будет заземлен, а в состоянии «ВКЛ.» Будет подавать напряжение Vcc.
Квадратурный энкодер – два выходных канала, сдвинутых по фазе на 90 электрических градусов. По разности фаз также можно определить направление вращения.
Разрешение – количество шагов строки на диске. Разрешение для инкрементальных энкодеров часто называют циклами на разрешение, а для абсолютных энкодеров – в битах.
Одноканальный энкодер – имеет только один выходной канал и используется в скоростных приложениях.
Прямоугольная – повторяющаяся форма волны, соответствующая высоким и низким сигналам.
Тест на кодировщик
1. Для чего используются инкрементальные энкодеры с одним выходным каналом?
A. Направление измерения
B. Измерение скорости (тахометры)
C. Обратная связь по положению
2. Что из перечисленного НЕ является разницей между абсолютным и инкрементным энкодером?
А.Абсолютные энкодеры обеспечивают уникальное положение.
B. Absolute использует концентрические круги на прозрачном диске, в то время как инкрементальные энкодеры используют равномерно расположенные непрозрачные секции для определения движения.
C. И абсолютные энкодеры, и инкрементальные энкодеры теряют положение из-за потери / отказа питания.
3. Что из следующего относится к индексному каналу?
A. Устройство отслеживания положения
B. Референтная точка / точка начала отсчета
C. Определение расстояния
D. Все вышеперечисленное
4.Что делает кодировщик?
A. Чувствует механическое движение.
B. Предоставляет информацию о положении, скорости и направлении.
C. Преобразует аналоговую информацию в цифровую.
D. Ничего из вышеперечисленного.
E. Все вышеперечисленное.
5. Что означает CPR?
A. Циклов на оборот
B. Количество циклов на оборот
C. И A, и B
D. Ничего из вышеперечисленного.
6. Опишите ниже различные типы выходов кодировщика.
TTL – – это схемы логических вентилей, предназначенные для ввода и вывода двух типов состояний сигнала: высокого (1) и низкого (0). При переходе между высоким и низким сигналами генерируются прямоугольные сигналы TTL.
Открытый коллектор – является выходом с пониженным энергопотреблением. В состоянии «ВЫКЛ.» Открытый коллектор будет заземлен, а в состоянии «ВКЛ.» Открытый коллектор будет плавать. Для приложений с открытым коллектором требуется исходный код.
Line Driver – является исходным выходом.Это означает, что в состоянии «ON» драйвер линии будет подавать Vcc, а в состоянии «OFF» драйвер будет плавать. Для приложений линейного драйвера требуется вход с понижением напряжения.
Push-Pull – представляет собой комбинацию линейного драйвера и открытого коллектора. В состоянии «ВЫКЛ.» Он будет заземлен, а в состоянии «ВКЛ.» Будет подавать напряжение Vcc.
7. Что из перечисленного является преимуществом кодировщика?
A. Низкая стоимость
B. Высокое разрешение
C. Высокая надежность и точность
D.Компактный размер
E. Интеграция оптических и цифровых технологий
F. Все вышеперечисленное
8. На сколько электрических градусов квадратурные каналы сдвинуты по фазе?
A. 45
B. 120
C. 60
D. 90
9. Перечислите критерии выбора энкодера:
1. Выход
2. Желаемое разрешение (CPR)
3. Шум и длина кабеля
4. Индексный канал
5.-1 = 0,000767 дюйма на импульс
Часто задаваемые вопросы о кодировщиках
В: Что такое энкодер?
A: Энкодер – это датчик механического движения, который генерирует цифровые сигналы в ответ на движение.
В: Как установить кодировщик?
A: Для получения пошаговых руководств по установке кодировщиков Anaheim Automation щелкните здесь.
Q: В чем разница между абсолютным и инкрементным энкодерами?
A: Абсолютные и инкрементальные энкодеры различаются двумя способами:
– Каждая позиция абсолютного энкодера уникальна
– Абсолютный энкодер никогда не теряет свое положение из-за потери мощности или отказа.Инкрементальные энкодеры теряют отслеживание положения при потере или отказе питания
В: Что такое канал?
A: Канал – это электрический выходной сигнал от энкодера.
В: Что такое квадратура?
A: Квадратура имеет два выходных канала с повторяющимися прямоугольными волнами, которые сдвинуты по фазе на 90 электрических градусов. По разности фаз также можно определить направление вращения.
В: Что такое индексный импульс?
A: Индексный импульс, также называемый опорным или маркерным импульсом, представляет собой одиночный выходной импульс, генерируемый один раз за оборот.
Q: Какие еще существуют типы технологий кодирования?
A: Существует два типа технологий кодирования.
– Оптический: в этой технологии используется свет, попадающий в фотодиод через прорези в металлическом / стеклянном диске.
– Магнитный: полоски намагниченного материала помещаются на вращающиеся диски и воспринимаются датчиками Холла или магниторезистивными датчиками.
Q: В каких типах приложений реализованы энкодеры?
A: Они часто используются в шаговых двигателях, автоматизации, робототехнике, медицинских устройствах, управлении движением и многих других приложениях, требующих обратной связи по положению.
В: Работает ли диск кодировщика (колесо кодирования) с любым модулем кодировщика?
A: Нет, каждое разрешение и каждый диаметр диска работают с разными модулями кодировщика.
В: Что такое PPR?
A: PPR означает импульс на оборот во вращательном движении для вращательного движения и импульс на дюйм или миллиметр для линейного движения.
В: Когда можно использовать единственный выходной канал в инкрементальном энкодере?
A: Один выходной канал для инкрементального энкодера может использоваться, когда не важно определять направление.В таких приложениях используются тахометры.
Q: Будет ли компания Anaheim Automation устанавливать энкодер на двигатели?
A: Да, будет создан специальный номер детали для включения энкодера, прикрепленного к двигателю.
Требуемое техническое обслуживание
Энкодерытребуют очень небольшого обслуживания из-за их прочности и надежности. Тем не менее, рекомендуется минимизировать воздействие на энкодеры частиц пыли или мусора, а также, если они не предназначены для воздействия воды или влаги.Кроме того, под действием ударов и вибрации диски кодировщика могут поцарапаться, что приведет к поломке кодировщика. Если такое событие произойдет, возможно, потребуется заменить диск, чтобы обеспечить точные показания.
Условия окружающей среды для энкодера
Следующие меры по охране окружающей среды и безопасности должны соблюдаться на всех этапах эксплуатации, обслуживания и ремонта энкодера. Несоблюдение этих мер предосторожности нарушает стандарты безопасности при проектировании, производстве и предполагаемом использовании энкодера.Обратите внимание, что даже с хорошо сконструированным кодировщиком неправильно установленные и эксплуатируемые изделия могут представлять опасность. Пользователь должен соблюдать меры предосторожности в отношении нагрузки и условий эксплуатации. В конечном итоге заказчик несет ответственность за правильный выбор, установку и работу кодировщика.
Атмосфера, в которой используется энкодер, должна способствовать соблюдению общих правил работы с электрическим / электронным оборудованием. Не используйте энкодер в присутствии легковоспламеняющихся газов, пыли, масла, пара или влаги.Для использования вне помещений энкодер должен быть защищен от внешних воздействий соответствующей крышкой, обеспечивая при этом достаточный поток воздуха и охлаждение. Влага может вызвать опасность поражения электрическим током и / или вызвать поломку системы. Следует уделять должное внимание недопущению попадания любых жидкостей и паров. Свяжитесь с заводом-изготовителем, если для вашего приложения требуются определенные степени защиты IP. Целесообразно устанавливать энкодер в среде, свободной от конденсата, пыли, электрических шумов, вибрации и ударов.
Кроме того, предпочтительно работать с энкодерами в нестатической защитной среде. Открытые цепи всегда должны быть надлежащим образом ограждены и / или закрыты для предотвращения несанкционированного контакта человека с цепями под напряжением. Во время подачи питания запрещается выполнять какие-либо работы. Не подключайте и не отключайте разъемы при включенном питании. После выключения питания подождите не менее 5 минут, прежде чем проводить инспекционные работы на кодировщике, потому что даже после отключения питания во внутренней цепи схемы кодировщика все еще будет оставаться некоторое количество электроэнергии.
Спланируйте установку энкодера в конструкции системы, свободной от мусора, такого как металлический мусор от резки, сверления, нарезания резьбы и сварки, или любого другого постороннего материала, который может контактировать со схемой. Если не предотвратить попадание мусора в кодировщик, это может привести к повреждению и / или удару.
Срок службы энкодера
Срок службы энкодера зависит от различных факторов, таких как воздействие окружающей среды и использование в приложениях.За счет ограничения воздействия на кодировщик электрического оборудования, превышения рекомендованных значений температуры, конденсации, вибрации и ударов, а также использования кодировщика в соответствии с указаниями производителя можно продлить срок службы кодировщика.
Принадлежности
Наряду с линейкой энкодеров, Anaheim Automation предлагает обширную линейку несимметричных и дифференциальных кабелей энкодеров с четырьмя, шестью и восемью выводами, длиной до 16 футов и инструментами для центрирования энкодеров.Кроме того, Anaheim Automation предлагает расширенную линейку шаговых, бесщеточных и серводвигателей, которые могут использоваться для энкодеров для ваших приложений.
Что делает энкодер для электродвигателей?
Датчики вращения отслеживают положение и движение валов электродвигателей – но как они работают?
А какой тебе нужен?
Что такое кодировщик?Энкодер – это устройство, используемое для обеспечения обратной связи с системой управления путем определения изменения положения.Датчики вращения работают с электродвигателями, чтобы определять вращательное движение, связанное с валом двигателя. В зависимости от типа используемого энкодера они могут предоставлять информацию об изменении положения, абсолютном положении и даже скорости вала.
Кодерынеоценимы для небольших серводвигателей, которые работают с большой точностью и точностью в 3D-принтере. Они так же важны для массивных двигателей, используемых с кранами для подъема тяжелых и громоздких предметов. Фактически, энкодеры можно найти практически во всех отраслях, от нефтехимической до производства бумаги и целлюлозы.
Как работает кодировщик?Мы уже говорили о том, что угловой энкодер отслеживает положение и скорость вала двигателя. На основе этих данных он генерирует сигнал обратной связи с обратной связью. Затем этот сигнал используется системой управления для принятия решений о параметрах работы двигателя.
Существует несколько различных технологий, которые кодер может использовать для генерации сигналов обратной связи. К ним относятся резистивные, магнитные, механические и оптические.Из них проще всего понять оптический: энкодер обеспечивает обратную связь по скорости и положению на основе прерывания света.
Чтобы понять, как работают кодеры, мы можем взглянуть на базовый оптический кодировщик. Система оптического кодировщика состоит из следующих компонентов:
- Кодовый диск , имеющий рисунок, который представляет различные положения вала
- Источник света , который освещает кодовый диск
- Узел фотоприемника , который генерирует сигнал на основе шаблона, обнаруженного с кодового диска
- Плата электроники , которая интерпретирует сигнал, генерируемый блоком фотодетектора, и направляет его в систему управления движением
- Система управления движением , которая регулирует параметры двигателя на основе обратной связи, полученной от углового энкодера
В качестве еще одного более сложного примера рассмотрим магнитный кодировщик.В энкодере двигателя с постоянными магнитами этот сигнал обратной связи обеспечивает синхронизацию положений статора и ротора двигателя с током, подаваемым приводом. Ток подается на обмотки, когда магниты ротора попадают в надлежащий диапазон положения, так что крутящий момент двигателя максимизируется.
Варианты монтажа энкодераСуществует три основных варианта монтажа энкодера: ступица / полый вал, с валом и без подшипника. Энкодеры с полым валом крепятся непосредственно к валу с помощью простого подпружиненного троса.Это упрощает их установку, но важно обеспечить электрическую изоляцию энкодера от самого двигателя.
В держателе кодировщика с валом муфта соединяет вал двигателя и вал кодировщика. Одним из преимуществ этого подхода является то, что он позволяет электрически и механически изолировать датчик от двигателя. С другой стороны, муфта и более длинный вал увеличивают стоимость.
Типы сигналов энкодера и их применениеЕсть два типа сигналов, которые может выдавать датчик двигателя: инкрементный и абсолютный. Инкрементальные сигналы указывают на то, что позиция изменилась, но не предоставляют никакой информации о конкретной позиции. Инкрементальные энкодеры часто используются в промышленных приложениях с асинхронным двигателем переменного тока. Их выбирают, когда бюджетные ограничения делают стоимость проблемой или когда требуется только информация об относительном местоположении.
Абсолютные сигналы , однако, указывают на то, что положение изменилось и каково текущее абсолютное положение. Это достигается путем создания различных двоичных выходных данных (иногда называемых «словом») для каждой позиции.Абсолютные энкодеры используются, когда требуется высокая степень точности и точности, но они не будут такими надежными, как их инкрементальные аналоги. Кроме того, абсолютные энкодеры часто встречаются в сервоприводах с бесщеточными двигателями с постоянными магнитами и используются, когда точность и точность критичны.
Заключение Энкодеры– это мощный инструмент для электродвигателей, но с таким большим количеством опций, касающихся технологии измерения, абсолютного или относительного положения, а также вариантов монтажа, может быстро стать проблемой найти подходящий энкодер для ваших приложений.Здесь, в HECO, мы можем использовать свои знания и опыт, чтобы помочь вам найти правильные решения для энкодеров для ваших двигателей. Свяжитесь с нами сегодня!
Автор: Хантер Шилдс, [адрес электронной почты]; 312-415-2096
Как работают оптические энкодеры …
Понимание того, как работают оптические энкодеры, особенно угловые энкодеры, может помочь вам устранить (и понять) проблемы с энкодерами на ваших буровых установках.
Во-первых, основы:
Практически все оптические кодировщики работают одинаково.Светодиод (обычно инфракрасный) проходит через кодирующий диск с линиями, которые прерывают луч света к фотосенсору. (Некоторые из них отражают свет от отражающего диска кодировщика со светлыми / темными участками вместо того, чтобы пропускать свет, но другие принципы кодирования идентичны).
Но это не так просто, как пропустить луч через диск кодера в реальном мире и получить на выходе прямоугольную последовательность импульсов.
светодиодных световых луча расходятся или расходятся, поэтому на датчике оптического кодировщика могут образоваться «нечеткие» тени.Датчик энкодера хочет видеть четкое включение / выключение изменений, когда линии проходят перед лучом светодиода энкодера. Чтобы решить эту проблему, производители кодировщиков добавляют линзы поверх светодиода. Это делает световые лучи почти параллельными.
Диск энкодера содержит линии, которые прерывают луч. Опять же, в идеале производитель кодировщика хочет, чтобы линии были как можно более резкими, чтобы обеспечить четкие переходы от темного к светлому и от светлого к темному на датчике кодировщика.Производители энкодеров годами использовали стеклянные энкодерные диски в энкодерах станков. Линии могут быть размещены на стеклянном диске с большой точностью. Однако стеклянные диски энкодера имеют серьезные проблемы с долговечностью в таких тяжелых условиях, как бурение нефтяных скважин. Поэтому производители оптических энкодеров для промышленного применения перешли на металлические диски с протравленными отверстиями, пластиковые диски или сверхармированное стекло.
Каждый из этих типов дисков энкодера имеет ограничения.Диск энкодера из сверхупрочненного стекла по-прежнему остается стеклом и может выйти из строя при сильных ударах и вибрации при сверлении или других тяжелых условиях эксплуатации. Пластиковые диски энкодера изгибаются при вибрации, что может привести к ошибкам при измерении скорости или положения. Металлические диски кодировщика также могут изгибаться, а крошечные отверстия для дисков кодировщика могут забиваться пылью или мусором.
Если говорить о пыли и мусоре, они представляют собой огромную проблему для всех оптических кодировщиков, независимо от типа диска. Они могут блокировать свет точно так же, как линия на диске поворотного энкодера, обманывая систему датчиков энкодера.Это создает ошибки скорости для инкрементальных энкодеров и ошибки положения для абсолютных энкодеров.
Вода? Кто-то сказал жидкости? Одиночная капля жидкости на диске поворотного энкодера действует как линза, искривляя свет. Теперь положение энкодера не измеряется точно. Что еще хуже, если оптический кодировщик нагреется, влага может испариться! Теперь неисправный квадратурный энкодер снова начинает работать!
Теперь давайте посмотрим, что происходит с другой стороны диска энкодера.
На этой стороне диска энкодера в большинстве оптических поворотных энкодеров находится «маска», которая представляет собой набор линий, которые точно соответствуют диску. Пропуская свет через маску кодировщика, переходы включения / выключения становятся более резкими. (Опять же, цель оптических энкодеров – четко различать светлые и темные области для точного измерения движения).
Затем свет падает на набор фотодетекторов кодировщика. Обычно это кремниевые полупроводниковые элементы, тесно связанные с солнечными элементами.Больше света позволяет течь большему количеству электронов; темнота препятствует потоку электронов. Вот изображение фотоэлемента; К сожалению, в этом поворотном энкодере вращающийся диск контактировал с датчиком энкодера, разрушая его и оставляя видимый след.
Таким образом, несмотря на все усилия по созданию четких переходов от светлого к темному, вы можете подумать, что выходной сигнал фотодатчика кодировщика будет прямоугольной волной, как показано на первой иллюстрации выше. Но это не так – это синусоидальная (и косинусная) волна.
Производители большинства поворотных энкодеров добавляют схемы компаратора для создания прямоугольных импульсов в квадратурных энкодерах, также называемых.инкрементальные энкодеры.
Теперь выходной сигнал компараторов почти готов для использования заказчиком. Большинство производителей инкрементальных энкодеров добавляют к выходу микросхему линейного драйвера. Целью микросхемы драйвера линии энкодера является обеспечение дифференциального квадратурного выхода (A, A /, B, B /), обеспечение достаточной мощности для передачи сигнала энкодера по длинным проводам и защита энкодера от ошибок подключения.
Большинство поворотных энкодеров теперь также добавляют импульс маркера с дополнительным сигналом, называемым (Z и Z /), индексом или многими другими названиями.Для получения дополнительной информации о сигналах поворотного энкодера и информации о проводке энкодера см. Наш блог о предотвращении сбоев энкодера.
Абсолютные поворотные оптические энкодеры похожи на оптические инкрементальные энкодеры, но у них больше линий и больше датчиков. В следующем блоге мы рассмотрим абсолютные оптические кодировщики, их отличия от инкрементальных кодировщиков и их сходство с ними.
Для получения дополнительной информации об устранении сбоев (оптических) энкодеров на нефтяных буровых установках, загрузите нашу техническую документацию
Прекращение простоев, связанных с кодировкой, при бурении нефтяных и газовых скважин.Часть 1 из серии: энкодеры верхнего привода
Как использовать датчики вращения для быстрого преобразования механического вращения в цифровые сигналы
В эпоху цифровых технологий измерение вращения механического вала двигателя или вращающейся ручки инструмента должно выполняться быстро и эффективно. Аналоговые методы, такие как потенциометры и поворотные переключатели, заменяются поворотными энкодерами, которые непосредственно оцифровывают вращательное движение, но проектировщики должны уметь понимать различия между различными типами энкодеров и точно интерпретировать их цифровые выходы.
В этой статье описывается роль энкодеров и принципы их работы. Затем он показывает, как интерпретировать их сигналы, прежде чем вводить кодирующие решения и их реальное применение.
Роль датчиков угла поворота
Датчик угла поворота – это тип датчика, который измеряет вращение механического вала. Вал может быть на двигателе, где он будет считывать угловое положение или скорость вращения. Они также могли считывать угловое положение циферблата, ручки или другого электронного элемента управления на передней панели прибора или прибора, заменяя потенциометры и поворотные переключатели.
Рассмотрим таймер на устройстве. В старые аналоговые времена для определения положения этого элемента управления использовался переменный резистор или потенциометр. В современных конструкциях на основе микропроцессоров цифровые входы, генерируемые поворотным энкодером, более эффективны.
Энкодеры также могут использоваться в системах управления для обеспечения обратной связи о том, что механическая часть движется правильно в ответ на команду управления. Независимо от того, находится ли система управления в автомобиле или в роботизированном устройстве, энкодеры обеспечивают необходимые измерения для управляющего микропроцессора.Старые решения, такие как однооборотные потенциометры, определяют менее полного вращения вала, но угловые энкодеры могут определять полное вращение без остановок.
Датчики вращения преобразуют эти механические перемещения в электрические сигналы, которые можно отправить в процессор для интерпретации. На основе электрических выходных сигналов энкодера можно определить направление вращения, угловое положение и скорость вращения. Цифровые выходы поворотных энкодеров делают это намного проще по сравнению с потенциометрами.
Принцип работы энкодеров
Существует два основных типа энкодеров: инкрементальные и абсолютные. Инкрементальный энкодер считывает изменения углового смещения, а абсолютный энкодер считывает абсолютный угол закодированного вала. Они реализуются с использованием трех распространенных технологий: оптической, механической или магнитной.
Рис. 1. Примеры инкрементных и абсолютных оптических дисков. Инкрементальный диск генерирует два прямоугольных сигнала с разностью фаз 90 ° между ними.Абсолютный диск выводит данные в двоичном коде. (Источник: Digi-Key Electronics)Оптические кодеры построены на основе диска с полупрозрачными и непрозрачными сегментами, расположенными так, чтобы свет проходил через определенные области. Используя светодиод и фотодиоды на противоположных сторонах диска (рис. 1), фотодиоды обнаруживают свет, проходящий через диск, и формы выходных импульсов, соответствующие полупрозрачным и непрозрачным узорам на сегментах диска. Абсолютный диск на рисунке 1 имеет четыре выхода, обеспечивающих уникальный двоичный код для каждого сегмента диска – в данном случае 16 (см. Таблицу ниже).Альтернативой двоичному коду является код Грея – двоичный код, в котором соседние двоичные слова отличаются только однобитовым переходом.
16 двоичных состояний абсолютного энкодера с четырьмя битами. (Источник: Digi-Key Electronics)Образец, генерируемый инкрементальным диском, состоит из двух прямоугольных волн с разностью фаз 90 ° и называется квадратурным выходом. Этого также можно достичь с помощью однорядного шаблона и двух фотоэлектрических датчиков, смещенных на расстояние, эквивалентное фазовому сдвигу на 90 °.Выходы квадратурных инкрементальных энкодеров обычно обозначаются буквами A и B. Кодер может также включать в себя третий импульс один раз на оборот, называемый индексным импульсом, для обеспечения известного физического опорного сигнала.
Комбинируя индексный импульс с квадратурными выходами, можно вычислить абсолютную ориентацию вала. Имея два выхода с фазовым сдвигом на 90 °, можно определять не только угловое вращение, но и направление вращения (рис. 2). При вращении вала энкодера по часовой стрелке сигнал A будет опережать сигнал B.Если направление вращения изменяется на против часовой стрелки, сигнал B будет опережать сигнал A.
Рисунок 2. Фазовое соотношение между квадратурными сигналами определяет направление движения диска энкодера. (Источник: Digi-Key Electronics)С помощью двух квадратурных сигналов можно разрешить четыре состояния за цикл. Состояния внутри одного цикла: A = 1 и B = 0, A = 1 и B = 1, A = 0 и B = 1, и, наконец, A = 0 и B = 0. Это означает, что угловое разрешение квадратуры выходной сигнал энкодера в четыре раза больше номинального числа импульсов на оборот (PPR).
Просмотр и измерение квадратурных выходов оптического кодировщика на осциллографе показывает фазовое соотношение между выходами (рисунок 3). Сигнал A показан на верхнем графике, а сигнал B – на нижнем графике. Параметр фазы осциллографа P1 устанавливается для измерения разности фаз между сигналами A и B. Средняя разность фаз между двумя сигналами составляет 90,4 °.
Рис. 3. Квадратурные выходы оптического энкодера с 512 импульсами на оборот (PPR), показывающие фазовые соотношения между выходами сигналов A и B (Источник: Digi-Key Electronics)В этом примере использовался только один выход A , поскольку энкодер использовался как тахометр, измеряющий скорость вращения двигателя.Частота сигнала A составляет 28,87 килогерц (кГц) с помощью параметра осциллографа P2. Она преобразуется в скорость вала путем деления на 512 импульсов на оборот (PPR) и умножения на 60 для считывания угловой скорости вала в оборотах в минуту (RPM), считываемой в параметре P3 как 3383 RPM. Исходя из этих чисел, 512 PPR этого кодировщика обеспечивают базовое разрешение 0,7 °. Интерпретируя состояния A / B, можно разрешить 0,175 °.
Оптические энкодеры обладают преимуществом самого высокого разрешения среди всех типов энкодеров.Их стоимость хорошо масштабируется для недорогих недорогих приложений. С другой стороны, они могут быть громоздкими. В механических энкодерах используется вращающийся диск, содержащий концентрические кольца, идентичные шаблонам, используемым в оптических энкодерах. Кольца имеют узор из токопроводящих и изолированных участков. Неподвижные контакты стеклоочистителя скользят по вращающемуся диску, контактируя с каждым кольцом и действуя как переключатели. Поскольку контакты протирают поверхность диска, контакт устанавливается при протирании по проводящей области или разрывается при протирании по изолированной области.Таким образом, для каждого кольца создается цифровой шаблон.
Одна проблема, которая может возникнуть с механическими энкодерами, – это шум, вызванный дребезгом контактов. Этот шум можно устранить, используя низкочастотную фильтрацию или используя программное обеспечение для просмотра состояния выхода после того, как шум отражения утих. Механические энкодеры обычно являются наименее дорогим типом энкодеров. Они находят применение в качестве устройств пользовательского интерфейса на электронных лицевых панелях, заменяя потенциометры.
Магнитные датчики вращения используют многополюсный круговой магнит.Чередующиеся северный и южный магнитные полюса воспринимаются с помощью эффекта Холла или магниторезистивных датчиков, генерирующих квадратурные электрические выходы при повороте магнита. Магнитные энкодеры, как и оптические энкодеры, являются бесконтактными и могут работать на более высоких скоростях и в течение более длительного времени, чем механические контактные энкодеры.
Использование поворотных энкодеров
Электромеханическая природа поворотного энкодера требует, чтобы он взаимодействовал с механическими устройствами или пользователем. Когда энкодеры используются в качестве интерфейсов управления на электронных устройствах, они используют сплошной вал и обычно устанавливаются на панели управления с помощью втулки для монтажа на панели с соответствующим оборудованием.
Разработчики могут выбирать такие опции, как фиксаторы, которые вызывают механический «щелчок» при вращении энкодера, давая пользователям тактильную обратную связь о движении вала энкодера. Они также могут выбрать мгновенный контактный переключатель, который активируется нажатием на вал энкодера. Энкодеры, предназначенные для установки на вращающихся машинах, таких как двигатели или сервоприводы, имеют полые или глухие валы (Рисунок 4).
Рис. 4. Энкодеры с полым или глухим валом предназначены для установки на двигателях или других электромеханических машинах.(Источник: Digi-Key Electronics)Энкодер с полым валом устанавливается на валу двигателя или аналогичного механического устройства. Это гарантирует, что он установлен концентрично контролируемому устройству, и исключает возможность асимметричного или углового смещения. Глухие валы – это полые валы с ограниченной глубиной, используемые для установки энкодера на конце вала двигателя.
Выбор и применение энкодера
Рис. 5. CTS 291V1022F832AB со стандартной резьбовой втулкой, стопорной шайбой и стопорной гайкой, предназначенный для использования в качестве панели управления.(Источник: CTS)Выбор углового энкодера зависит от требований приложения и окружающей среды, а также от ограничений по стоимости. 291V1022F832AB от CTS Electronic Components – это оптический инкрементальный энкодер с угловым разрешением 8 PPR, работающий от источника питания 5 В (Рисунок 5). Серия 291 поддерживает разрешение PPR от 4 до 64 PPR, с дополнительным выбором типа и длины вала, фиксаторов и встроенного переключателя. Номинальный срок службы энкодера при вращении составляет до 3 миллионов циклов.Оптические кодировщики идеально подходят для приложений управления приборами, включая медицинское и лабораторное оборудование, средства связи, промышленное оборудование, HVAC, транспорт, безопасность, аудио и домашнее развлекательное оборудование.
Bourns Inc. EMS22Q51-D28-LT4 – это инкрементальный магнитный энкодер от 32 до 256 PPR, работающий от источника питания 5 или 3,3 В. Как и предыдущие энкодеры, он имеет множество доступных конфигураций вала и втулки, но его номинальный срок службы составляет 50 миллионов циклов.Эти энкодеры идеально подходят для использования в суровых промышленных условиях при экстремальных температурах, влажности и загрязнении частицами. Кроме того, как и у многих кодировщиков, подключение и использование устройства просты (рис. 6).
Рис. 6. Детали контактов EMS22Q51-D28-LT4 (вставка слева) и блок-схема показывают простоту подключения инкрементального бесконтактного магнитного энкодера 256-PPR к микроконтроллеру. (Источник: Digi-Key Electronics)Серия EMS22Q имеет шесть контактов – по одному для питания и заземления, один активный выбор микросхемы низкого уровня, который идет на микроконтроллер или микропроцессор, один индексный контакт и два контакта данных (A и B).Результирующий квадратурный выходной сигнал показан на рисунке 7.
Рисунок 7. EMS22Q выдает квадратурный выходной сигнал с диапазоном PPR от 32 до 256. (Источник: Bourns Inc.)Разработчики устройств для недорогих приложений могут эффективно использовать механический энкодер, такой как энкодер EN11-HSM1AF15 20-PPR компании TT Electronics. Этот энкодер является частью серии EN11, которая предлагает угловое разрешение 15 или 20 PPR, различные длины вала и втулки, выбор дополнительных переключателей и выбор конфигураций фиксаторов.Этот энкодер работает от источника питания 5 В, стоит примерно одну десятую стоимости оптических энкодеров и имеет срок службы 30 000 циклов вращения.
Заключение
Энкодеры удовлетворяют потребность в быстром и эффективном обнаружении и оцифровке углового поворота элемента управления на передней панели, манипулятора робота или вращающегося вала двигателя. Инкрементальные или абсолютные энкодеры обеспечивают необходимый интерфейс для микропроцессоров или микроконтроллеров, позволяющий обнаруживать и контролировать компоненты электромеханических систем.
Эта статья предоставлена компанией Digi-Key Electronics , Thief River Falls, MN.
.