
Реле безопасности — где и как они работают
Реле безопасности — где и как они работают
Реле безопасности в магазине
Реле безопасности — это устройства, реализующие функции безопасности. В случае опасности реле безопасности сработает, чтобы снизить риск до приемлемого уровня. При возникновении ошибки реле безопасности инициирует безопасную и надежную реакцию. Каждое реле безопасности контролирует определенную функцию. Подключив их к другим реле безопасности, можно добиться полного контроля за машиной или установкой. Реле безопасности — это простой и эффективный способ соответствовать существующим стандартам безопасности, обеспечивающий безопасную работу вашего персонала и оборудования, а также длительный срок службы. Снижение риска должно быть приоритетом для любого бизнеса, чтобы защитить своих сотрудников и снизить вероятность дорогостоящих аварий или замены оборудования. Как правило, если риск можно уменьшить, то это должно быть сделано.
Некоторые функции реле безопасности включают в себя:
- Контролируемая и безопасная остановка движения.
- Контроль положения подвижных ограждений.
- Прерывание закрывающего движения во время доступа.
- Аварийное выключение/останов.
Управление защитным реле
Реле безопасности просты в эксплуатации и имеют понятную структуру. Благодаря этому их использование не требует каких-либо специальных обучающих мероприятий. Как правило, все, что необходимо для успешной эксплуатации реле безопасности, — это некоторые общие знания в области электротехники и некоторое знание стандартов, требуемых в вашей конкретной ситуации. Применение реле безопасности получило широкое распространение благодаря их компактной конструкции, высокой надежности, а главное; тот факт, что они соответствуют всем необходимым стандартам. Они стали неотъемлемым компонентом любой новой установки или машины, где необходимы функции безопасности.
Реле безопасности в полевых условиях
Реле безопасности обычно используются в устройствах управления, таких как:
- Световые завесы: Световые завесы действуют как своего рода натяжные тросы и используются для защиты персонала в
рядом с движущимися механизмами, которые могут причинить вред. Когда любой из инфракрасных лучей, генерируемых
устройство сломано, на соответствующее оборудование посылается стоп-сигнал. Легкие завесы обычно
подключен к защитному реле, которое затем будет обрабатывать фактический процесс отключения движущей силы от
опасность. Некоторые реле безопасности могут быть оснащены функцией отключения звука, которая позволяет
временное отключение функции безопасности. Например, при использовании со световыми завесами отключение звука может позволить
объекты проходят через шторы без срабатывания защитного реле.

- Защитные коврики: Реле безопасности, чувствительные к давлению, могут использоваться вместе с защитными ковриками для обеспечения безопасности персонала и в качестве дополнительного дополнения к другим защитным устройствам. Например, можно установить набор светильников. шторы, позволяющие проходить через них, когда защитный коврик активирован, позволяя получить доступ к грузу или разгрузить машину. Коврики безопасности также можно использовать в качестве самостоятельной меры безопасности. Как легкие занавески, они могут быть настроены на инициирование команды остановки при активации.
- Трехпозиционные устройства: Устройства безопасности, такие как трехпозиционное устройство, могут быть необходимы, когда
устранение неполадок приложения, и в этой категории есть множество устройств. Трехпозиционные устройства
часто имеют чувствительный к давлению джойстик, который удерживается в определенном положении для работы, и когда
пользователь отпускает джойстик, он возвращается в положение остановки по умолчанию.
- Двуручное управление: Двуручное управление необходимо для операций, требующих высокой степень учета безопасности. Такие устройства имеют решающее значение, когда вы хотите, чтобы оператор не возможность проникнуть в опасную зону. Когда устройство находится вне досягаемости от органов управления оператора, вместо этого может быть достаточно устройства управления одной рукой.
- Магнитные переключатели: Магнитный переключатель полезен в тех случаях, когда важно, чтобы дверь или люк были закрыты, или чтобы два объекта пересекались или были выровнены друг с другом. При контакте двух
датчики потеряны, сигнал аварийной остановки может быть отправлен на соответствующее реле, чтобы безопасно остановить машину
от операционной. Магнитные переключатели очень компактны, что позволяет легко позиционировать или прятать их при использовании в
ворота или выключатели. Поскольку для работы не требуется механический контакт, магнитный переключатель часто рекламирует
длительный эксплуатационный срок.
- Кнопки аварийного останова: Кнопки аварийного останова (также известные как E-stop) используются для остановки машины, когда он ломается, если кто-то в опасности. Все кнопки экстренной остановки должны быть красного цвета с желтым корпусом. Некоторые кнопки аварийной остановки также будут иметь трос аварийного захвата, позволяющий взаимодействовать с кнопкой остановки. интерфейс даже на расстоянии от самой кнопки. Поручневая проволока также должна быть красной для облегчения удостоверение личности.
- Бесконтактные датчики безопасности: Подобно магнитному переключателю, бесконтактный датчик безопасности идеально подходит для использования, когда важно, чтобы сегменты были выровнены, но когда они не должны находиться в прямом контакте, в отличие от
с магнитным переключателем. Некоторые из этих датчиков также позволяют использовать несколько датчиков в
соединение, позволяющее при необходимости выполнить более точную настройку.

- Блокировочные предохранительные выключатели: Блокировочный предохранительный выключатель используется для обнаружения блокировки компонентов. вместе, а также может использоваться для удержания их на месте до тех пор, пока не будут выполнены определенные параметры, такие как завершение операции. Это может быть достигнуто несколькими различными способами, такими как пружинный замок или само запирание. когда возникает указанное положение.
Реле безопасности Обзор продукта Видео
(Назад к реле безопасности)
Управление электродвигателем трубогиба
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Настоящее изобретение направлено на усовершенствование управления электродвигателями. В частности, она воплощена в системе, особенно соответствующей требованиям электроинструментов, таких как трубогибочные станки. Он обеспечивает работу двигателя в любом направлении и динамическое торможение.
Особое преимущество системы заключается в полном использовании твердотельного электронного управления, что позволяет отказаться от традиционных электромагнитных реле, которые долгое время были источником проблем при управлении трубогибочным станком.
В моей настоящей системе реализовано электронное управление двигателем, которое подает двухполупериодный выпрямленный реверсивный постоянный ток на двигатель во время движения вперед (изгиб) и назад (разгрузка) и обеспечивает однополупериодный выпрямленный ток для выключения двигателя.
Система дополнительно включает маломощную электронную логику и схемы блокировки для передачи сигналов от переключателя управления работой машины на органы управления мощностью двигателя. Они предназначены для обеспечения безопасной, быстрой и надежной работы.
Сущность и преимущества изобретения будут ясны из прилагаемых чертежей и подробного описания предпочтительного варианта осуществления изобретения.
ЧЕРТЕЖИ
РИС.
РИС. 2а и 2б представляют собой принципиальную схему электрической системы управления.
ПОДРОБНОЕ ОПИСАНИЕ
Мое изобретение описано применительно к коммерчески доступному трубогибу, такому как Greenlee 555 Electric Bender, производимый Greenlee Tool Co. из Рокфорда, штат Иллинойс, подразделение Ex-Cell-O Corporation. Детали трубогиба не имеют отношения к описанию моей системы управления.
Вкратце, трубогиб (фиг. 1) включает в себя колесо или башмак 5, который медленно вращается с помощью электродвигателя 6 через редуктор 7. Отрезок трубы 9 удерживается между колесом 5 и проушиной 10 и направляется опорный ролик 11. Труба показана согнутой примерно на 90°. Индекс 13 на колесе и шкала 14 на раме 15 станка указывают угол изгиба. Колесо 5 вращается по часовой стрелке, как показано, чтобы выполнить изгиб, и против часовой стрелки, чтобы освободить заготовку и вернуть трубогиб в исходное положение.
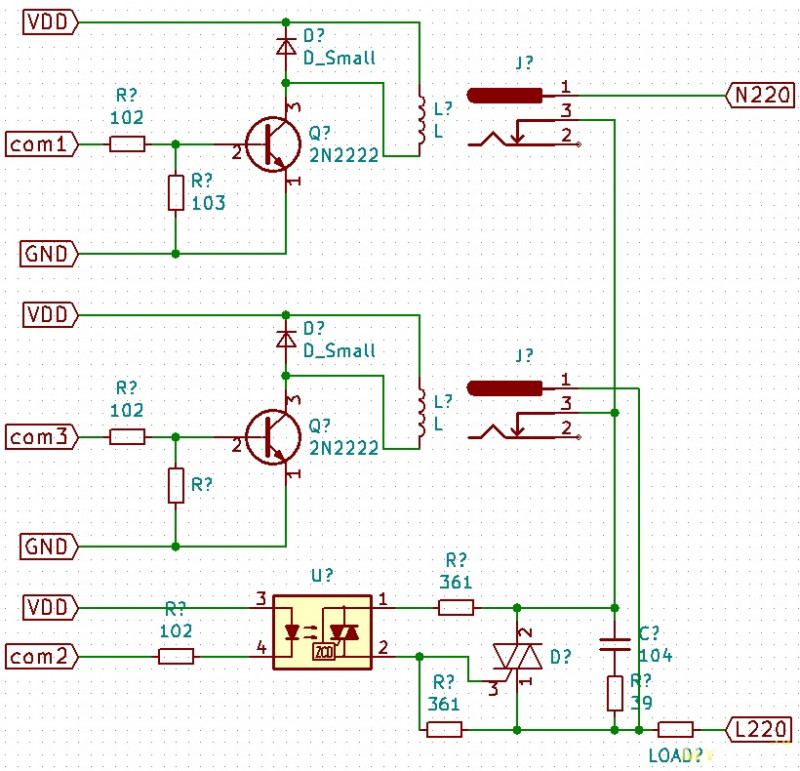
Обратимся теперь к фиг. 2а, оператор машины использует дистанционный или подвесной переключатель 17 для управления двигателем. Этот переключатель имеет среднее открытое положение и может передавать +12 В постоянного тока от подходящего источника на «изгибающий» контакт 18 или «разгрузочный» контакт 18′. Контакт 18 соединен линией 19 с четырехвходовым логическим элементом И 21, который может быть половиной интегральной схемы Motorola типа MC 14082. Линия 19 заземлена через помехоподавляющую цепь из конденсатора 22 и резистора 23. Плюс 12 вольт. подается на вентиль И от источника.
2а, оператор машины использует дистанционный или подвесной переключатель 17 для управления двигателем. Этот переключатель имеет среднее открытое положение и может передавать +12 В постоянного тока от подходящего источника на «изгибающий» контакт 18 или «разгрузочный» контакт 18′. Контакт 18 соединен линией 19 с четырехвходовым логическим элементом И 21, который может быть половиной интегральной схемы Motorola типа MC 14082. Линия 19 заземлена через помехоподавляющую цепь из конденсатора 22 и резистора 23. Плюс 12 вольт. подается на вентиль И от источника.
Логический элемент 21 передает нулевой сигнал на разветвление 26, если все его входы не равны +. Если предположить, что это так, сигнал включения двигателя передается через резистор 27 кОм 27 и резистор 29 2,7 МОм на линию 30, которая обеспечивает вход для последовательных инверторов операционных усилителей 31 и 33, которые подают сигнал включения на базу транзистора NPN. 34. Через описываемые цепи этот транзистор вызывает подачу питания на двигатель 6.
При включении транзистор 34 запитывает последовательную цепь через светодиод (LED) 38, резистор 150 Ом 39, оптопары 41 и 42 и линию 43 к переходу 45. Этот ток питает светодиоды в оптопарах 41 и 42. Оптопары также содержат фотоприемники, которые включаются излучением диодов. Оптопары 41 и 42 соединяют логические схемы низкого напряжения со схемами управления мощностью, которые будут описаны.
Светодиод 38 виден оператору станка, указывая на включение состояния «изгиба».
Цепь через оптопары 41 и 42 продолжается от перехода 45 через светодиод оптопары 46, линию 47 и коллекторно-эмиттерную цепь транзистора 49 на землю. Этот транзистор включается после временной задержки после первоначальной подачи питания на цепи управления 12 В постоянного тока, чтобы гарантировать, что подача питания на управление стабильна до срабатывания цепей управления двигателем. Плюс 12 В подается через резистор 4,7К 50 и стабилитрон IN753 51 на базу транзистора 49. Конденсатор 53 (3,3 мФд) должен зарядиться до уровня пробоя Зенера перед включением транзистора 49. Диод 55 разряжает этот конденсатор, когда отключается питание управления 12 В.
Плюс 12 В подается через резистор 4,7К 50 и стабилитрон IN753 51 на базу транзистора 49. Конденсатор 53 (3,3 мФд) должен зарядиться до уровня пробоя Зенера перед включением транзистора 49. Диод 55 разряжает этот конденсатор, когда отключается питание управления 12 В.
Возвращаясь к выключателю ручного управления 17, он перемещается, чтобы активировать контакт 18′ для реверсивного или «разгрузочного» режима работы двигателя 6. Это активирует цепь к разветвлению 45, идентичную той, что описана выше. Для краткости элементы этой схемы пронумерованы по-прежнему с добавлением штрихов. Светодиод 38′ в этой схеме указывает на подачу питания на двигатель для «разгрузки».
Очевидно, оптопара 46 получает питание, когда двигателю приказано работать в любом направлении. Причина этого будет видна.
Возвращаясь к схеме “изгиб”, когда она включена, + сигнал передается сразу от перехода 26 через диод 57, инвертирующий усилитель 58 и линию 59 на один вход логического элемента И 21′ для предотвращения обратного включения двигателя. Как будет видно, завершение этого сигнала задерживается. Аналогичным образом сигнал передается от манометра 21′ на строб 21, когда выбрано «разгрузить». Входы инверторов 58 и 58′ заземлены резисторами 61 и 61′ номиналом 100 кОм.
Как будет видно, завершение этого сигнала задерживается. Аналогичным образом сигнал передается от манометра 21′ на строб 21, когда выбрано «разгрузить». Входы инверторов 58 и 58′ заземлены резисторами 61 и 61′ номиналом 100 кОм.
Сигнал управления “изгиб” с вентиля И 21 подается на вход инвертора 58 также через устройство задержки 62 на переход 63 и далее через диод 65, а также через последовательное соединение устройства задержки 66 и диода 67. Эти устройства задержки известны как управляющие подавители дребезга Motorola типа MC 14490. Таким образом, строб 21′ не может включиться с небольшой задержкой после того, как строб 21 выключится. По такой же схеме ворота 21 удерживаются в выключенном состоянии в течение некоторого времени после того, как ворота 21′ выключаются.
Соединения 63 и 63′ также соединены через диоды 69и 69′, на вход запуска (вывод 5) моностабильного мультивибратора (МВ) 70, Motorola типа МС 14528, и на землю через резистор 100К 71. На его вывод 2 МВ подается питание от +12 В через Резистор 72 на 270К и заземлен через конденсатор 73 3,3 мФд. Выходной вывод 6 МВ подключен к базе транзистора 74. Транзистор 74 управляет транзистором 75 для замыкания цепи от +12 В через светодиод 76, резистор 77 150 Ом, и светодиод оптопары 78 на землю. Как будет видно, эта оптопара управляет тормозом двигателя 6. Спадающий фронт на входе MV 70 запускает MV, чтобы подать питание на оптопару, и MV устанавливает примерно 2-секундную задержку перед отключением питания. оптопара 78.
Выходной вывод 6 МВ подключен к базе транзистора 74. Транзистор 74 управляет транзистором 75 для замыкания цепи от +12 В через светодиод 76, резистор 77 150 Ом, и светодиод оптопары 78 на землю. Как будет видно, эта оптопара управляет тормозом двигателя 6. Спадающий фронт на входе MV 70 запускает MV, чтобы подать питание на оптопару, и MV устанавливает примерно 2-секундную задержку перед отключением питания. оптопара 78.
Инвертированный выход (клемма 7) MV 70 возвращает нулевой сигнал на логические элементы И 21 и 21′, чтобы предотвратить подачу питания на двигатель после срабатывания MV, управляющего тормозом. Этот сигнал передается по линиям 79 и 79′ и устройствам задержки 81 и 81′ на остальные входы этих вентилей. Таким образом, двигатель не может быть реверсирован примерно до 1/2 секунды. после отключения питания или при работающей тормозной цепи.
Конденсатор 82 емкостью 22 мФд устанавливает время задержки для всех шести устройств задержки 62, 66, 81 и т. д., которые являются частями одной многокомпонентной интегральной схемы.
Фотодиод 76 информирует оператора станка о включении моторного тормоза.
К этому моменту мы описали схемы, по которым управляющий переключатель 12 управляет шестью оптопарами, управляющими цепями питания двигателя, и освещением фотодиодов 38, 38′ и 76 для информирования оператора станка. Теперь мы можем обратиться к фиг. 2б для силовых цепей двигателя, включая твердотельные реле и цепи их срабатывания.
Двигатель 6 представляет собой двигатель постоянного тока с возбуждением от постоянных магнитов. Питание подается от линий 82 и 84 переменного тока 120 В на двухполупериодный выпрямитель 85. Этот выпрямитель представляет собой схему, состоящую из четырех выпрямителей в обычной мостовой конфигурации. Выпрямители 86, 87 и 89являются диоды. Четвертый выпрямитель 90 представляет собой выпрямитель с кремниевым управлением (SCR), который не проводит ток, если только он не включен на своем электроде затвора 91, который подключен к входу переменного тока через резистор 93 1K.
Выпрямитель 85 питает плюсовую шину постоянного тока 94. и отрицательная шина постоянного тока 95. Электродвигатель 6 реверсивно запитывается от этих шин через набор из четырех кремниевых управляемых выпрямителей 97, 98, 99 и 100. Когда тиристоры 97 и 98 включаются, ток течет через двигатель в одном направлении. чтобы согнуть трубу. Когда 99 и 100, ток двигателя меняется на противоположный, чтобы разгрузить трубогиб. Видно, что эти тиристоры находятся в мостовой схеме.
Для торможения двигателя он шунтируется через резистор 102 мощностью 1 Ом 50 Вт симистором 103. Этот симистор может проводить ток в любом направлении под управлением его электрода затвора. Линии ввода питания двигателя обозначены как 105 и 106.
Электроды затвора симистора 103 и пять SCR управляются цепями, соединенными с цепями на фиг. 2а шестью оптронами. Они электрически изолируют логические схемы от силовых цепей. Оптопары 41, 41′, 42, 42′, 46 и 78 показаны также на фиг. 2б. Это может быть истолковано как представление реагирующей части на фотодетекторе каждого из них. В частности, предпочтительным фотодетектором является фототранзистор, который включается освещением от соответствующего светодиода.
В частности, предпочтительным фотодетектором является фототранзистор, который включается освещением от соответствующего светодиода.
Принимая во внимание детали управления двигателем, оптопара 41 подключена между плюсовой шиной постоянного тока 94 и шиной двигателя 105, ответвитель 41′ между шиной 94 и другой шиной двигателя 106, ответвитель 42 между отрицательной шиной постоянного тока 95 и шиной 106, и муфта 42′ между шинами 95 и 106. Все они подключены аналогичным образом. Фотоприемник 41 питается от шины 94 через резистор 47 Ом и подключен к шине 105 через резистор 1К 110. Вывод 111 подключается к затвору тринистора 97. Таким образом, этот тринистор включается положительным смещением на его затворе, когда ответвитель 41 проводит. Цепь через ответвитель шунтируется резистором 113 номиналом 2,2 кОм и конденсатором 114 емкостью 0,1 мкф последовательно с резистором 115 Ом 9.
Оптопара 42 подсоединена аналогичным образом, как указано ссылочными номерами со штрихами. Как указывалось выше, светодиоды этих соединителей одновременно запитываются, так что при проводке тиристоры 97 и 98 смещаются в сторону проводимости, а двигатель приводится в движение в направлении «изгиба» потоком от линии 105 к линии 106.
С другой стороны, когда на светодиоды соединителей 41′ и 42′ подается питание, они заставляют фототранзисторы этих соединителей смещать тиристоры 99 и 100, чтобы проводить, реверсируя ток через двигатель 6, приводя его в “разгрузочный режим”. ” направление.
Шины 105 и 106 соединены между собой через конденсатор 117 0,1 мкФ и резистор 10 Ом последовательно. Эта схема действует как демпфер, чтобы уменьшить скорость изменения напряжения между двумя шинами. Они также соединены между собой металлооксидным тиристором 119 для защиты от переходных напряжений.
Когда переключатель ручного управления 17 (РИС. 2а) отпускается, подача тока к двигателю 6 прерывается, и цепь, включающая мультивибратор 70, возбуждает оптопару 78. Эта муфта запускает симистор 103 (РИС. 2б), чтобы двигатель через резистор 102 и тем самым затормозить его. Затвор симистора постоянно подключен к шине 106 двигателя через резистор 121 1 кОм. Ответвитель 78, проводя, замыкает цепь от этого затвора через резистор 122 на 330 Ом до удаленной шины 105 двигателя, чтобы заставить симистор проводить . Симистор проводит в любом направлении. Кинетическая энергия двигателя поглощается сопротивлением пути через двигатель и резистор 102 для торможения двигателя. Через период, определяемый мультивибратором 70, ответвитель 78 обесточивается и при спаде напряжения на симисторе 103 шунт двигателя открывается. Логические элементы И 21 и 21′ теперь разрешают повторную подачу питания на двигатель.
Симистор проводит в любом направлении. Кинетическая энергия двигателя поглощается сопротивлением пути через двигатель и резистор 102 для торможения двигателя. Через период, определяемый мультивибратором 70, ответвитель 78 обесточивается и при спаде напряжения на симисторе 103 шунт двигателя открывается. Логические элементы И 21 и 21′ теперь разрешают повторную подачу питания на двигатель.
Оптопара 46 управляет SCR 90, который является одним из четырех выпрямителей, составляющих схему мостового выпрямителя 85. SCR 90 работает, когда его анод достаточно положителен, а его затвор 91 смещен положительно. Когда ответвитель не является проводящим, затвор 91 следует за потенциалом линии 83 и катодом SCR 90 за счет проводимости через резистор 93 1K. SCR остается непроводящим.
Оптопара 46 становится проводящей, когда на двигатель 6 подается питание для движения в любом направлении, поскольку его светодиоды соединены последовательно со светодиодами соединителей 41, 42, 41′ и 42.
