
подключение мотора жесткого диска своими руками / Howmakes
Если у вас испортился жесткий диск, не спешите его выбрасывать. В этой статье мы расскажем, как запустить мотор от винчестера с помощью специального драйвера.
Инструкция по запуску мотора от жесткого диска
Для работы понадобится электронная плата для подключения двигателей от жестких дисков. Плата на 10 ватт, что соответствует мощности мотора, питается от напряжения 5-15 вольт. На модуле должен быть коннектор для подключения трех фаз двигателя и питания, потенциометр для регулировки частоты вращения и перемычка для изменения его направления. Кроме этого на плате должно быть две микросхемы: драйвер и чип для генерации шим сигнала.
Используем схему подключения бесколлекторного
двигателя. Здесь есть 3 обмотки, 3 контакта. Если с центра звезды выходит
четвертый контакт, то он дополнительно подключается на плате на клемму с
надписью com.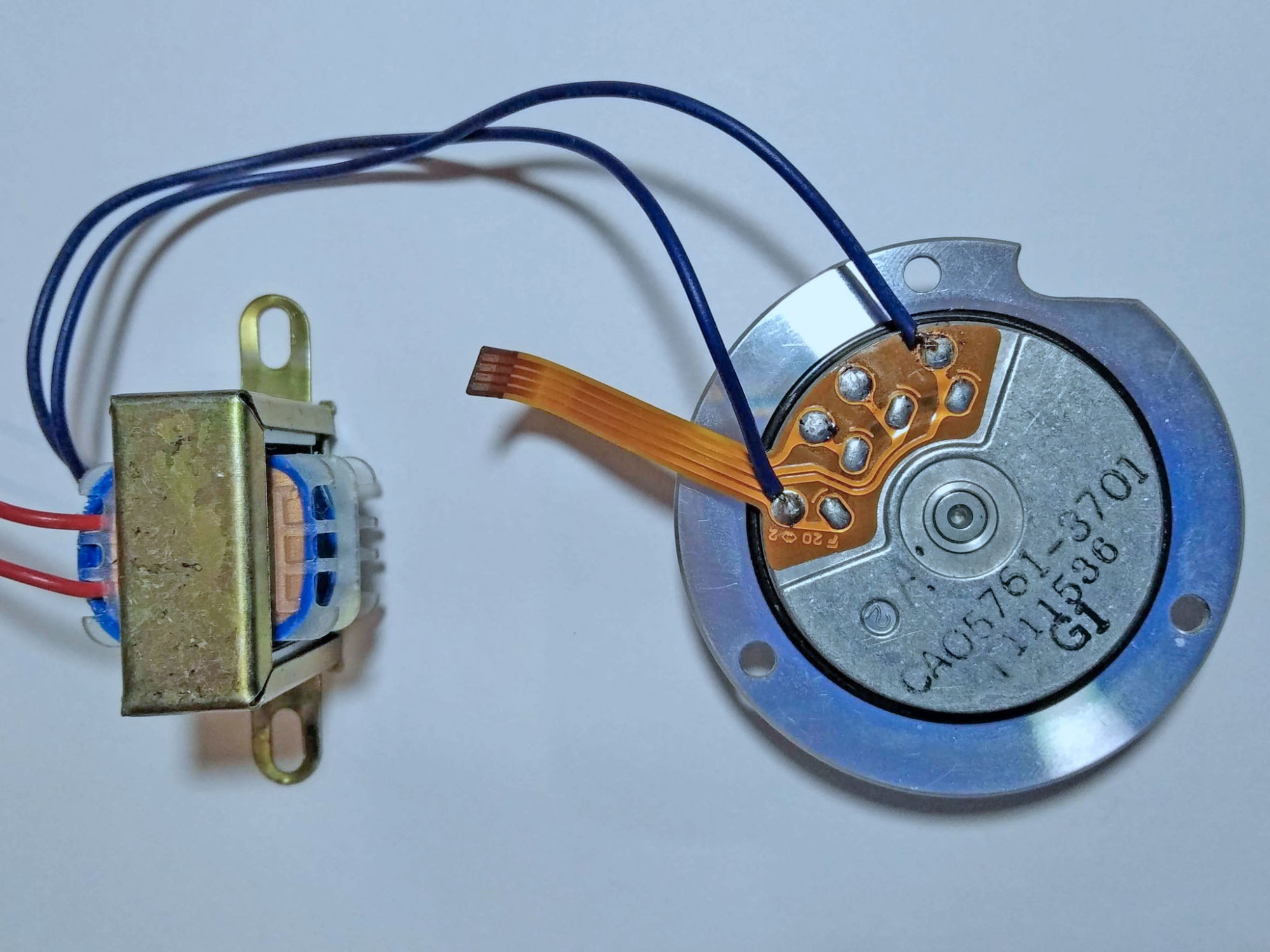
Пошаговая инструкция подключения мотора от жесткого диска.
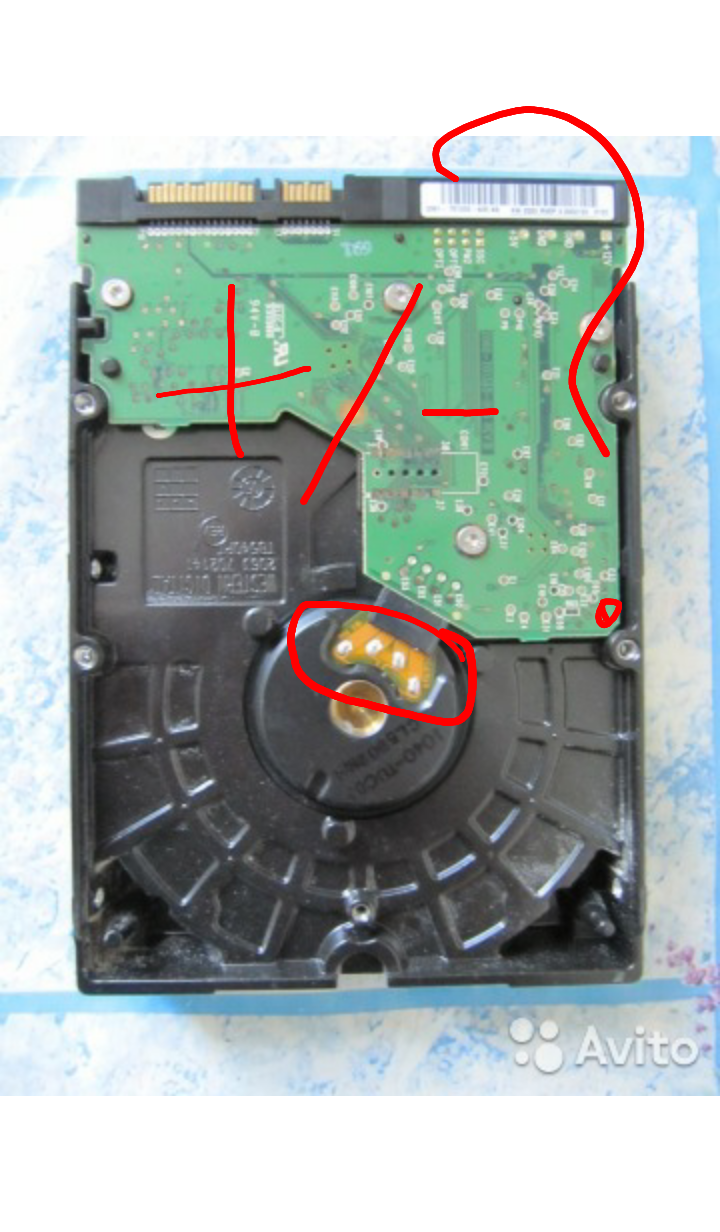
- Возьмите 3 провода и припаяйте их к контактам, которые находятся с обратной стороны жесткого диска.
- Подсоедините провода к плате, хорошо прикрутите и зажмите.
- Закрепите саму пластину, чтобы она не болталась.
- Подключите плату к источнику питания в соответствии с полюсами. На ней должна загореться контрольная лампочка.
- Запустите двигатель. Частоту вращения регулируйте потенциометром.
- Проверьте силу электрического тока. При 10 ваттах она должна составлять 1 ампер.
- Если под нагрузкой плата перегревается, наклейте на чипы небольшие алюминиевые радиаторы.
Скоростью вращения этого двигателя управляет напряжение. Чем оно больше, тем выше частота вращения и скорость.
В дальнейшем такой мотор можно использовать
для изготовления небольшой шлифовальной машинки, миниатюрной дрели или
вентилятора.
Comments (0)
Как я могу раскрутить старый мотор HDD?
Я раздобыл старый жесткий диск IDE (40-контактный) 1998 года для использования в проекте POV Display (Gr. 12 Computer Engineering), и я пытался его раскрутить.
Проблема в том, что двигатель HDD имеет бесщеточный двигатель постоянного тока, поэтому для его подключения требуется не только заземление и соединение с источником. Наша электроника имеет максимальный выходной ток около 200 мА (555, транзисторы, другие микросхемы), поэтому я не могу работать с ними.
Подключение жесткого диска с печатной платой к блоку питания включит двигатель только на 15 секунд, прежде чем он отключится.
Жесткий диск полностью удален, только двигатель и печатная плата ввинчены в основание. Мотор имеет 4 контакта.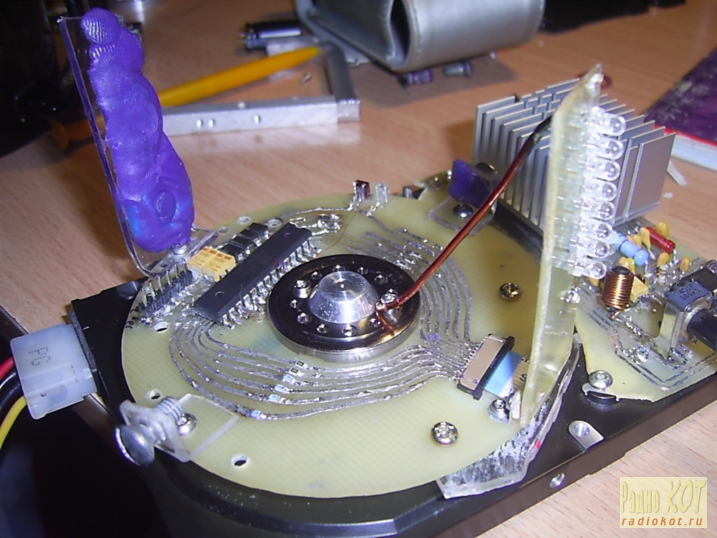
Информация о HDD:
- Fujitsu MPB3043AT
- 12 В постоянного тока 0,32 А
- 5 В постоянного тока 0,5 А
материалы:
- Arduino Uno
- Старый HDD
- PSU
- макетировать
- Батарея 9В
- 1,5 В батареи
- 74HC164 8-битные регистры Sihft
- 555 таймер IC
- 3904/3906 Транзисторы
- Конденсаторы, резисторы, потенциометры
Какие варианты у меня есть, чтобы двигатель вращался (желательно без блока питания, но я открыт для вариантов с блоком питания)? Есть ли на IDE контакт, который позволит мне включать / выключать его?
ОБНОВЛЕНИЕ 1: я возился с кабелем IDE. Когда я подключаю контакт 27 (IO Ready) к контакту 2 (заземление), двигатель начинает вращаться, как будто я только что подключил его к блоку питания, но только на 10 секунд. И мне пришлось подождать несколько минут, прежде чем я смог заставить его вращаться снова, используя этот метод
ОБНОВЛЕНИЕ 2: Оказывается, двигатель только 5 В, а не 12 В, что должно немного облегчить ситуацию
КАК ПОДКЛЮЧИТЬ МОТОР ОТ DVD ИЛИ HDD
Как-то давно попалась мне на обозрение схема драйвера шагового двигателя на микросхеме LB11880, но поскольку такой микросхемы у меня не было, а двигателей валялось несколько штук, отложил интересный проект с запуском моторчика в долгий ящик. Прошло время, и вот сейчас с освоением Китая с деталями проблем нет, так что заказал МС, и решил собрать и протестировать подключение скоростных моторов от HDD. Схема драйвера взята стандартная:
Прошло время, и вот сейчас с освоением Китая с деталями проблем нет, так что заказал МС, и решил собрать и протестировать подключение скоростных моторов от HDD. Схема драйвера взята стандартная:
Схема драйвера мотора
Далее идёт сокращённое описание статьи, полное читайте здесь. Двигатель, вращающий шпиндель жесткого диска (или CD/DVD-ROM) – это обычный синхронный трёхфазный мотор постоянного тока. Промышленность выпускает готовые однокристальные драйверы управления, которым к тому же не требуются датчики положения ротора, ведь в роли таких датчиков выступают обмотки двигателя. Микросхемы управления трёхфазными двигателями постоянного тока, которым не требуются дополнительные датчики, являются TDA5140; TDA5141; TDA5142; TDA5144; TDA5145 и конечно же
Двигатель, подключенный по указанным схемам, будет разгоняться до тех пор, пока либо не наступит предел по частоте генерации VCO микросхемы, которая определяется номиналами конденсатора подключенного к выводу 27 (чем его ёмкость меньше, тем выше частота), либо двигатель не будет разрушен механически. Не следует слишком уменьшать ёмкость конденсатора подключенного к выводу 27, так как это может затруднить пуск двигателя. Регулировка скорости вращения производится изменением напряжения на выводе 2 микросхемы, соответственно: Vпит – максимальная скорость; 0 – двигатель остановлен. От автора имеется и печатка, но я развёл свой вариант, как более компактный.
Не следует слишком уменьшать ёмкость конденсатора подключенного к выводу 27, так как это может затруднить пуск двигателя. Регулировка скорости вращения производится изменением напряжения на выводе 2 микросхемы, соответственно: Vпит – максимальная скорость; 0 – двигатель остановлен. От автора имеется и печатка, но я развёл свой вариант, как более компактный.
Позже пришли заказанные мной микросхемы LB11880, запаял в две готовые платки и провёл тест одной из них. Всё прекрасно работает: скорость регулируется переменником, обороты определить трудно но думаю до 10000 есть точно, так как двигатель гудит прилично.
В общем, начало положено, буду думать куда применить. Есть мысль сделать из него такой же точильный диск как у автора. А сейчас тестировал на куске пластика, сделал типа вентилятора, дует просто зверски хоть на фото даже не видно как он крутится.
Поднять обороты выше 20000 можно переключением ёмкостей конденсатора С10 и подачей питания МС до 18 В (18,5 В предел).
Видео подключения мотора HDD
Подключил ещё двигатель от CD, погонял при питании 18 В, поскольку в моём внутри шарики, разгоняется так, что прыгает всё вокруг! Жаль не отследить обороты, но если судить по звуку то она очень большая, до тонкого свиста. Куда применять такие скорости, вот вопрос? Приходит на ум мини болгарка, настольная дрель, точильный станок… Применений много – думайте сами. Собирайте, тестируйте, делитесь впечатлениями. В интернете есть множество обзоров с применением данных двигателей в интересных самодельных конструкциях. В интернете видео видел, там кулибины с этими моторами помпы мастерят, супер вентиляторы, точилки, покумекать можно куда такие скоростя применить, мотор тут разгоняется свыше 27000 оборотов. С вами был Igoran
.Форум
Форум по обсуждению материала КАК ПОДКЛЮЧИТЬ МОТОР ОТ DVD ИЛИ HDD
Подключение двигателя HDD к микроконтроллеру | RadioLaba.
 ru
ru
В жестких дисках, как правило, применяются трехфазные бесколлекторные двигатели. Обмотки двигателя соединены звездой, то есть получаем 3 вывода (3 фазы). Некоторые двигатели имеют 4 вывода, в них дополнительно выведена средняя точка соединения всех обмоток.
Чтобы раскрутить бесколлекторный двигатель, нужно в правильном порядке и в определенные моменты времени, в зависимости от положения ротора, подавать напряжение на обмотки. Для определения момента переключения на двигатель устанавливают датчики холла, которые играют роль обратной связи.
В жестких дисках применяется другой способ определения момента переключения, в каждый момент времени к питанию подключены две обмотки, а на третьей измеряется напряжение, исходя из которого, выполняется переключение. В 4-х проводном варианте для этого доступны оба вывода свободной обмотки, а в случае двигателя с 3-мя выводами, дополнительно создается виртуальная средняя точка, при помощи резисторов соединенных звездой и подключенных параллельно обмоткам двигателя. Так как коммутация обмоток выполняется по положению ротора, здесь присутствует синхронность между частотой вращения ротора и магнитного поля созданного обмотками двигателя. Нарушение синхронности может привести к остановке ротора.
Так как коммутация обмоток выполняется по положению ротора, здесь присутствует синхронность между частотой вращения ротора и магнитного поля созданного обмотками двигателя. Нарушение синхронности может привести к остановке ротора.
Существуют специализированные микросхемы типа TDA5140, TDA5141, 42,43 и другие, предназначенные для управления бесколлекторными трехфазными двигателями, но я не буду здесь их рассматривать.
В общем случае диаграмма коммутаций представляет собой 3 сигнала с импульсами прямоугольной формы, смещенные между собой по фазе на 120 градусов. В простейшем варианте запустить двигатель можно и без обратной связи, просто подавая на него 3 прямоугольных сигнала (меандр), смещенных между собой на 120 градусов, что я и сделал. За один период меандра магнитное поле созданное обмотками совершает один полный оборот вокруг оси двигателя. Скорость вращения ротора при этом зависит от количества магнитных полюсов на нем. Если количество полюсов равно двум (одна пара полюсов), то ротор будет вращаться с той же частотой что и магнитное поле. В моем случае ротор двигателя имеет 8 полюсов (4 пары полюсов), то есть ротор вращается в 4 раза медленнее, чем магнитное поле. У большинства жестких дисков с частотой вращения 7200 об/мин, ротор должен иметь 8 полюсов, но это лишь мое предположение, так как я не проверял кучу винчестеров.
В моем случае ротор двигателя имеет 8 полюсов (4 пары полюсов), то есть ротор вращается в 4 раза медленнее, чем магнитное поле. У большинства жестких дисков с частотой вращения 7200 об/мин, ротор должен иметь 8 полюсов, но это лишь мое предположение, так как я не проверял кучу винчестеров.
Если на двигатель подать импульсы с требуемой частотой, в соответствии с желаемой скоростью вращения ротора, то он не раскрутится. Здесь необходима процедура разгона, то есть сначала подаем импульсы с малой частотой, затем постепенно увеличиваем до требуемой частоты. Кроме этого процесс разгона зависит от нагрузки на валу.
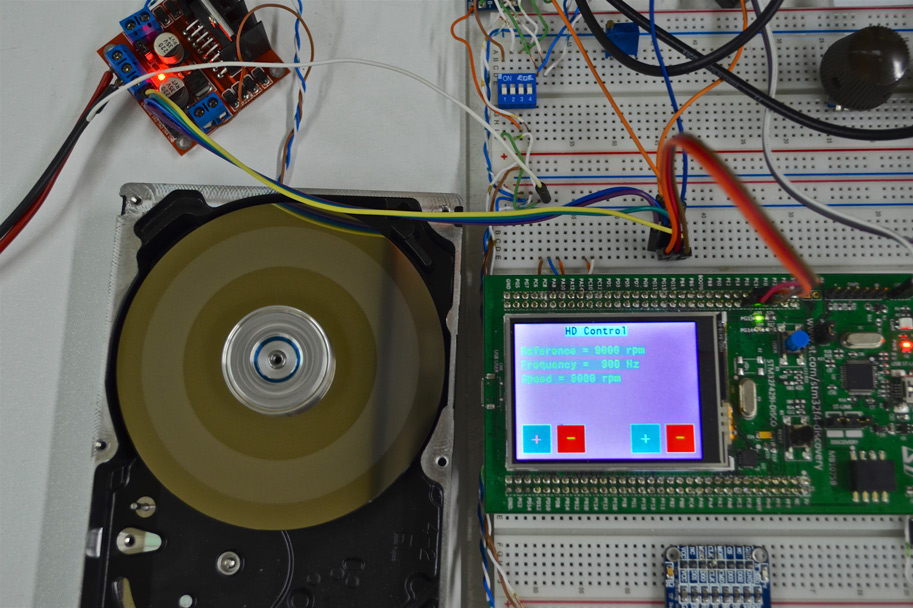
Для запуска двигателя я применил микроконтроллер PIC16F628A. В силовой части стоит трехфазный мост на биполярных транзисторах, хотя лучше использовать полевые транзисторы для уменьшения тепловыделения. Прямоугольные импульсы формируются в подпрограмме обработчика прерываний. Для получения 3-х сигналов сдвинутых по фазе, выполняется 6 прерываний, при этом получаем один период меандра.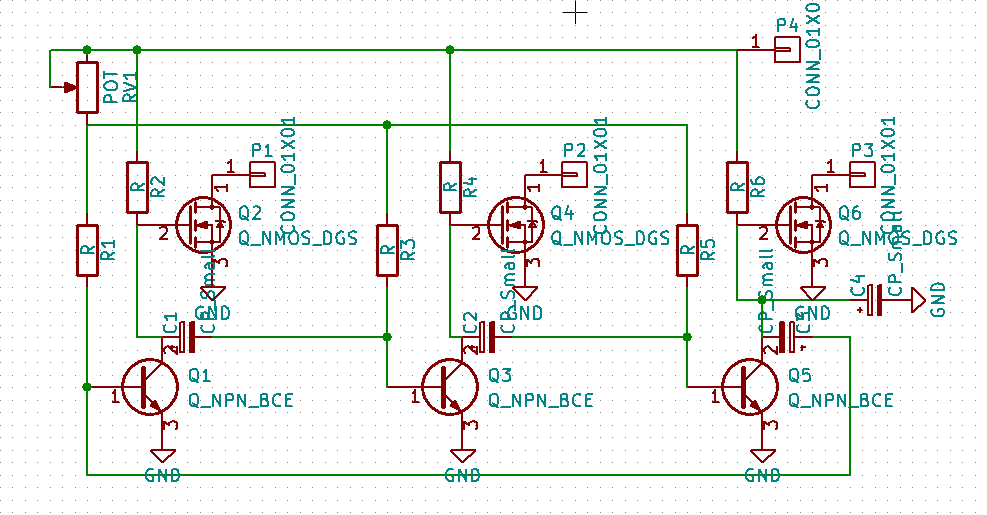 В программе микроконтроллера я реализовал плавное увеличение частоты сигнала до заданной величины. Всего 8 режимов с различной заданной частотой сигнала: 40, 80, 120, 160, 200, 240, 280, 320 Гц. При 8-ми полюсах на роторе получаем следующие скорости вращения: 10, 20, 30, 40, 50, 60, 70, 80 об/сек.
В программе микроконтроллера я реализовал плавное увеличение частоты сигнала до заданной величины. Всего 8 режимов с различной заданной частотой сигнала: 40, 80, 120, 160, 200, 240, 280, 320 Гц. При 8-ми полюсах на роторе получаем следующие скорости вращения: 10, 20, 30, 40, 50, 60, 70, 80 об/сек.
Прошивка МК и исходник + файл проекта Proteus_7.7
Разгон начинается с 3 Гц в течение 0,5 секунд, это экспериментальное время необходимое для начальной раскрутки ротора в соответствующем направлении, так как бывает, что ротор проворачивается на небольшой угол в обратную сторону, только затем начинает вращаться в соответствующем направлении. При этом теряется момент инерции, и если незамедлительно начать увеличение частоты, происходит рассинхронизация, ротор в своем вращении просто не будет успевать за магнитным полем. Чтобы изменить направление вращения, нужно просто поменять местами любые 2 фазы двигателя.
По истечении 0,5 секунд происходит плавное увеличение частоты сигнала до заданной величины. Частота увеличивается по нелинейному закону, скорость роста частоты увеличивается по ходу разгона. Время разгона ротора до заданных скоростей: 3,8; 7,8; 11,9; 16; 20,2; 26,3; 37,5; 48,2 сек. Вообще без обратной связи двигатель туго разгоняется, необходимое время разгона зависит от нагрузки на валу, я проводил все эксперименты без снятия магнитного диска (“блин”), естественно без него разгон можно ускорить.
Частота увеличивается по нелинейному закону, скорость роста частоты увеличивается по ходу разгона. Время разгона ротора до заданных скоростей: 3,8; 7,8; 11,9; 16; 20,2; 26,3; 37,5; 48,2 сек. Вообще без обратной связи двигатель туго разгоняется, необходимое время разгона зависит от нагрузки на валу, я проводил все эксперименты без снятия магнитного диска (“блин”), естественно без него разгон можно ускорить.
Переключение режимов осуществляется кнопкой SB1, при этом индикация режимов выполнена на светодиодах HL1-HL3, информация отображается в двоичном коде, HL3 – нулевой бит, HL2 – первый бит, HL1 – третий бит. Когда все светодиоды погашены, получаем число ноль, это соответствует первому режиму (40 Гц, 10 об/сек), если например горит светодиод HL1, получаем число 4, что соответствует пятому режиму (200 Гц, 50 об/сек). Переключателем SA1 запускаем или останавливаем двигатель, замкнутому состоянию контактов соответствует команда “Пуск”.
Выбранный режим скорости можно записать в EEPROM микроконтроллера, для этого надо удерживать кнопку SB1 в течение 1 секунды, при этом все светодиоды вспыхнут, тем самым подтверждая запись.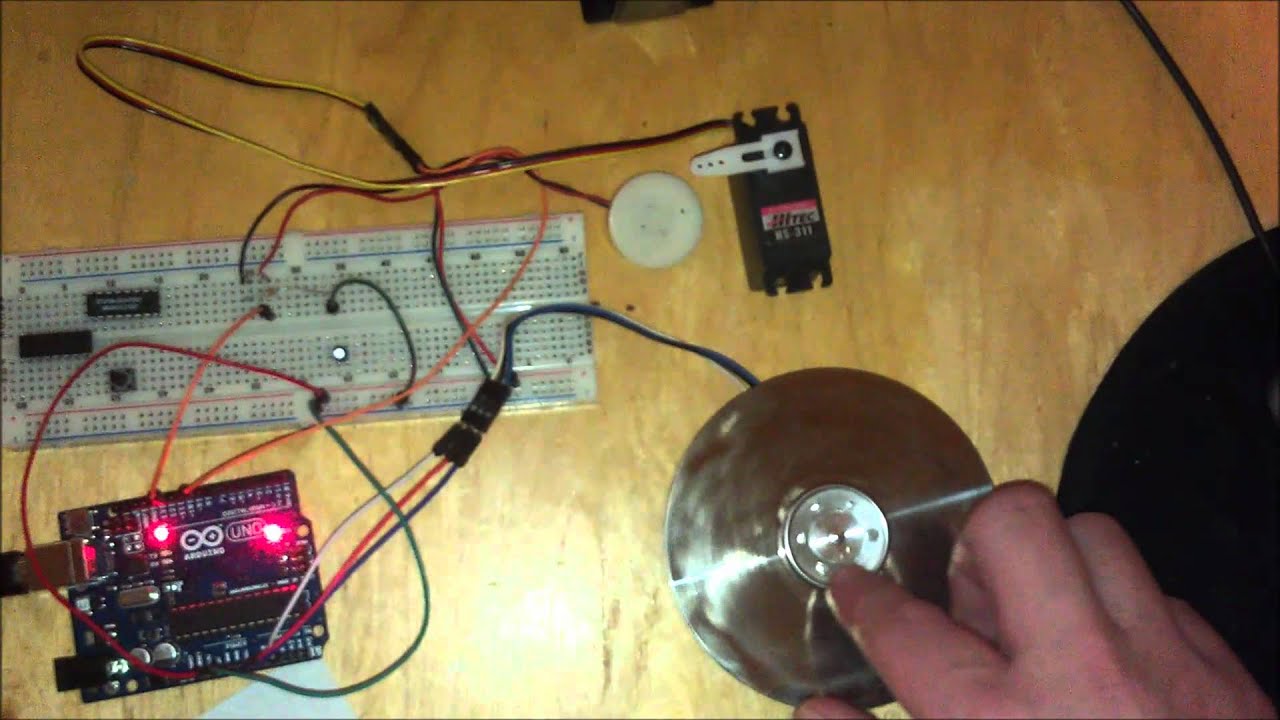 По умолчанию при отсутствии записи в EEPROM, микроконтроллер переходит в первый режим. Таким образом, записав режим в память и установив переключатель SA1 в положение “Пуск”, можно запустить двигатель просто подав питание на устройство.
По умолчанию при отсутствии записи в EEPROM, микроконтроллер переходит в первый режим. Таким образом, записав режим в память и установив переключатель SA1 в положение “Пуск”, можно запустить двигатель просто подав питание на устройство.
Крутящий момент у двигателя мал, что и не требуется при работе в жестком диске. При увеличении нагрузки на вал, происходит рассинхронизация и ротор останавливается. В принципе, если необходимо можно приделать датчик оборотов, и в случае отсутствия сигнала отключить питание и заново раскрутить двигатель.
Добавив 3 транзистора в трехфазный мост, можно уменьшить количество управляющих линий микроконтроллера до 3-х, как показано на схеме ниже.
Прошивка МК и исходник + файл проекта Proteus_7.7
В качестве питания я использовал нестабилизированный трансформаторный блок питания, с напряжением 11,7 В. Ток потребления в зависимости от скорости вращения колеблется в пределах 0,75 – 0,9 А. Транзисторы необходимо установить на теплоотвод.
На видео можно увидеть процесс запуска на разных скоростях, а также оптический датчик оборотов, который я приделал для измерения скорости вращения.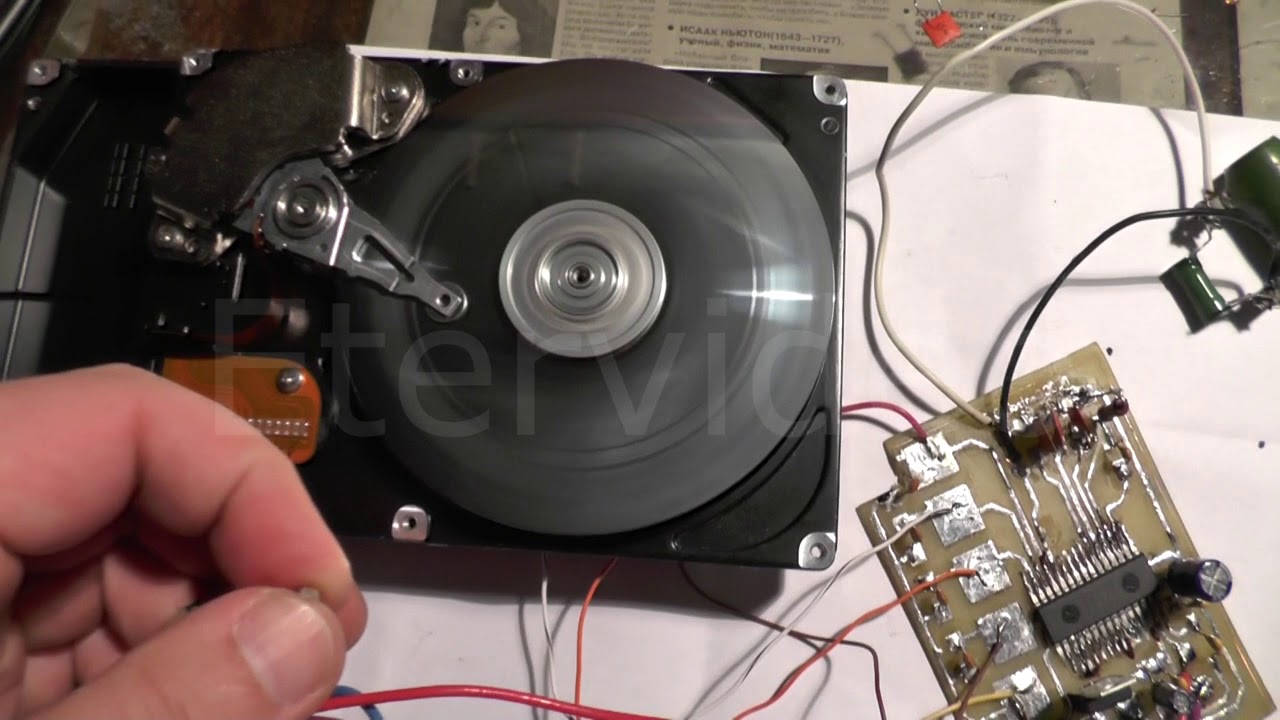
hard-drive – Как я могу заставить двигатель шпинделя жесткого диска работать от внешнего напряжения?
Если вы хотите создать схему контроллера / драйвера, это нормально, но если все, что вам нужно, – это запустить двигатель, я бы посмотрел на дешевый электронный регулятор скорости (ESC) от HobbyKing или местного магазина RC. ($ 8) Вид, который используется для привода бесщеточных двигателей в моделях радиоуправления. Они оцениваются по напряжению питания и выходному току. Обработка напряжения часто указывается в единицах “с”. 1 с = 3,7 В (номинальное напряжение элемента LiPo). Большинство работает на 2 или 3 ячейках LiPo (7,4 В или 11,1 В)
Эти бесщеточные двигатели не имеют датчиков, в которых в качестве источника датчиков используется ненарушенная обмотка. Я не думаю, что двигателю HDD требуется большой ток, поэтому слаботочный ESC будет всего несколько долларов.
http://www.hobbyking.com/hobbyking/store/__452__182__ESC_UBEC_VR-Under_20_Amp.html
Эти ESC обычно управляются выходом RC-приемника, но вы можете предоставить свой собственный сигнал ШИМ ИЛИ просто получить серво-тестер, который даст вам совместимый управляющий сигнал и ручку для игры. (5 долларов в Hobby King) http://www.hobbyking.com/hobbyking/store/uh_viewItem.asp?idProduct=14774
Если у вас в ESC есть BEC(схема отключения батареи), вы можете подключить серво тестер оттуда вместо того, чтобы найти отдельный источник питания 5В.
ESC работают с длительностью импульса от 1 мс до 2 мс (частота 30 Гц-50 Гц) так же, как сервоприводы привода. 1 мс = 0%, 2 мс = 100%
Помните, что вы будете приводить в движение мотор, а НЕ плату цирка. Вы можете удалить плату жесткого диска HDD все вместе. Подключите двигатель HDD напрямую. (3 провода)
Довольно просто, когда ты это понимаешь. Попросите любого, кто управляет электрическими самолетами RC или магазином хобби, помочь вам привести в движение этот “бесщеточный” мотор. Все эклектичные самолеты RC используют ESC, и эти парни будут знать, что вам нужно. Удачи. [email protected]
Попросите любого, кто управляет электрическими самолетами RC или магазином хобби, помочь вам привести в движение этот “бесщеточный” мотор. Все эклектичные самолеты RC используют ESC, и эти парни будут знать, что вам нужно. Удачи. [email protected]Шлифовальная машинка из HDD диска. Небольшие доработки.
Это так сказать результат. А ниже пред история …
Решил повторить проект шлифовальной машинки с двигателем от HDD уважаемого мной Валеры Перминского .
Скачал любезно предоставленные файлы и сходу на печать.Однако результат удивил. Двигатель от жёсткого диска Samsung отличался посадочным местом от моего HDD Hitachi. Впрочем дело обычное для меня. Готовые STL ки почти всегда чем то не устраивают. Ну а если не устраивает – садимся за самостоятельное проектирование.
Итак корпус. Надо сделать его универсальным под любые HDD движки.
А как? Да просто! Посадочное место делаем отдельной деталью.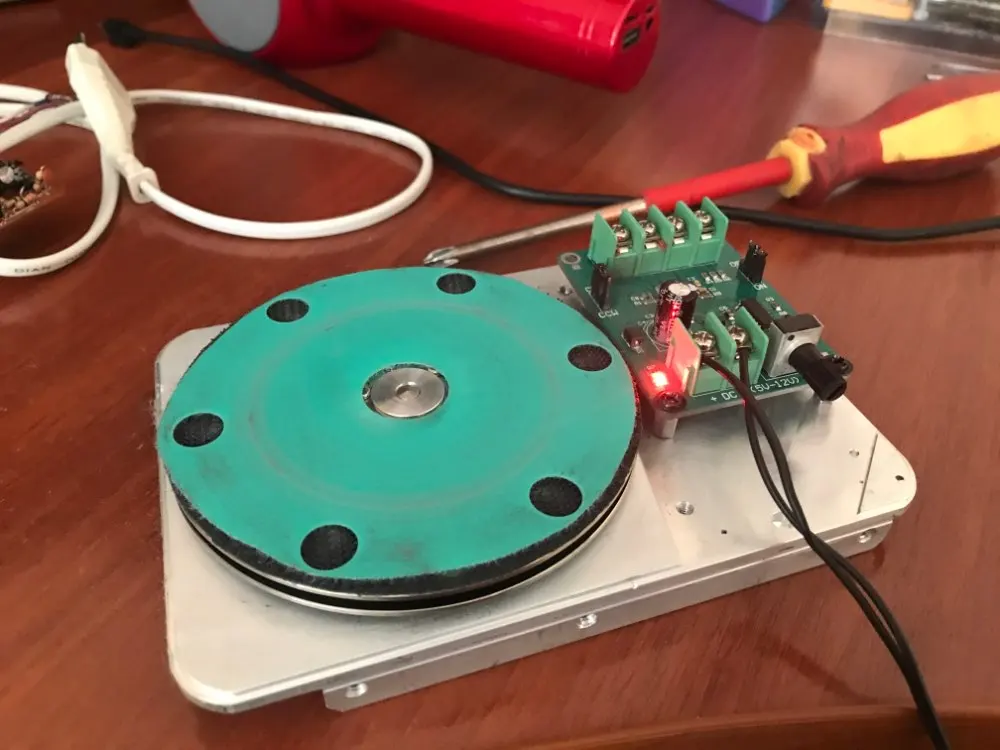
Посадочные размеры снимаем с демонтированного двигателя.
Далее печатаем , шлифуем, словом как обычно..
После печати Начинаем сборку. Тут тоже есть нюансы.
Несколько слов об основании для шлифовального диска.. Печатал слоем 0.1 мм со 100% заполнением. Получился тяжёленьким, что даст дополнительный инерционный момент.
Как Вы понимаете, он имеет свои посадочные размеры и это тоже надо учитывать.
После печати не спешите ставить мотор на место. Лучше сразу закрепить диск на роторе на все винты. Потом подключить регулятор для HDD и запустить мотор. Обороты плавно увеличивайте: возможно возникнет вибрация из-за неравномерной посади диска на вал движка. Даже если всё гуд, подшлифуйте диск по внешнему контуру. Это почти токарка. Я добился полного отсутствия вибрации на максимальных оборотах.
За тем наклейте пятачок для фиксации наждачного круга. Брал по ссылке из видеоролика Валерия (смотрите выше)
Потом разбираем и устанавливаем мотор в посадочное кольцо на саморезы и вместе с мотором вклеиваем его на место.
Далее устанавливаем плату регулятора и разъём питания. Последний штрих – нижняя крышка. Приклеил её на несколько точек клеем “Момент-Кристалл”. Так, всегда легко её демонтировать. Но если Вас такой вариант не устраивает легко прихватить на три маленьких самореза.
В принципе всё. Добавил чуток эстетики и универсальности. От себя скажу – вещь очень нужная ! Доволен пополнением в мастерскую.
Исходники для редактирования здесь:
https://3dtoday.ru/3d-models/khobbi/sdelay-sam/slifovalnaya-masinka-iz-hdd-diska
Всем успехов в творчестве.
Колхозный DIY. Как сделать из старого жесткого диска мини-наждак с помощью драйвера zs-x9b.
Если у вас есть старые нерабочие жесткие диски, немного времени и руки, которые нечем занять, то данный обзор будет вам полезен.Далее я расскажу, как из старого 3.5 дюймового жесткого диска можно сделать мини-наждак для мелких работ.
Для этого нам понадобится драйвер zs-x9b и подручный инструмент.
 Ну и руки понадобятся, даже если они кривые.
Ну и руки понадобятся, даже если они кривые.Пишу сразу: Это DIY из разряда «лютый колхоз». Все что вы увидите, сделано максимально коряво и почти из палок и мха. Никого не призываю к повторению, всё что написано, написано исключительно в ознакомительных целях.
Вы спросите “а зачем это нужно?”
А ответ простой: да делать нечего, решил херней пострадать. Заодно и вам покажу.
Вобще на подобного рода поделку меня вдохновило видео от Алекса Гайвера. Вот оно:
Посмотрев это видео, я решил повторить конструкцию.
Заказал на alexpress регулятор скорости, и спустя несколько недель получил его.
Регулятор представляет собой простую платку с крутилкой:
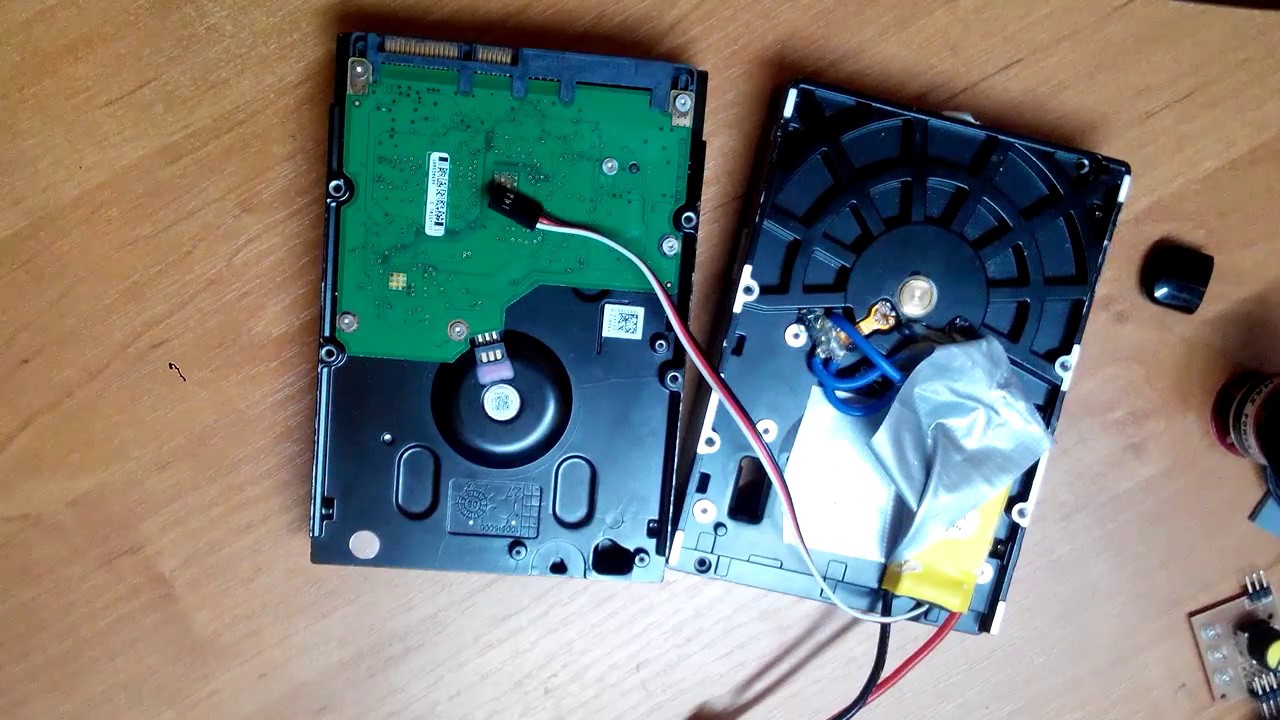
Для опытов достал с ящика старый жесткий диск на 3.5 дюйма. Сперва начал разбирать, потом вспомнил что надо его сфотографировать:
Продолжаю разбирать:
Неодимовые магниты я пускаю в дело.
 С их помощью удобно вешать разный инструмент на железную стенку того же блока питания. Микросхемы выкидываю в мусорку. Винтики убираю в коробку с разными болтами и винтиками, вдруг в будущем пригодятся. А сам корпус жесткого диска с мотором уже можно приспособить под мининаждак:
С их помощью удобно вешать разный инструмент на железную стенку того же блока питания. Микросхемы выкидываю в мусорку. Винтики убираю в коробку с разными болтами и винтиками, вдруг в будущем пригодятся. А сам корпус жесткого диска с мотором уже можно приспособить под мининаждак:Схема подключения очень простая. Два провода (красный и чёрный) — это плюс и минус внешнего источника питания. А остальные желтый белый и зеленый припаиваю к контактам моторчика:
Проверяю.
Лампочки на регуляторе горят, питание есть, мотор крутится. При работе мотора потребление не очень большое:
Доходит до 0.5А лишь при нагрузке, когда что-то точишь. Но это тоже совсем мало, поэтому сгодится любой блок питания на 12V.
В качестве наждачного диска у меня будет использоваться кусок наждачной бумаги. Вырезал его по размеру диска на моторе:
Прижал шайбой, которая держит жесткий диск. Включил, работает:
Скорость приличная, к тому же еще может регулироваться.

Считай, что конструкция уже готова.
Что можно ей сделать? Можно, например, подточить замятую отвертку:
Можно подточить винтик:
Можно подточить какую либо деталь из 3Д принтера или из того же полиморфа:
А можно разобрать всё и выкинуть в мусорку. Так как для серьёзной работы такой наждак не сгодится. Так, побаловаться только.
Хотя думаю если поменять крепёж диска, или, например, попробовать поставить небольшой диск от болгарки, то можно подтачивать кухонные ножи, которые не сильно жалко.
А еще можно вытащить мотор из корпуса, нацепить на него лопасти, сделать корпус и получится вентилятор с возможностью регулировки скорости обдува. Но это надо прям совсем морочиться, а мне не очень хочется.
Если прям включить фантазию, то вариантов использования мотора из жесткого диска и данного регулятора много. Всё зависит от кривизны рук и потребностей. Я показал лишь самый простой вариант.
На этом весь мой обзор. Всем хорошего настроения и прямых рук.
Двигатель шпинделя жесткого диска
Накопитель жесткого диска – это компактный мехатронный компонент, и на нем нет места для размещения его двигателя. С другой стороны, двигатели жестких дисков (так называемые «двигатели шпинделя») должны быть способны генерировать достаточный крутящий момент, чтобы магнитные пластины могли вращаться с желаемой скоростью. Это означает, что решающим требованием к шпиндельным двигателям является большое соотношение между их мощностью и размером.
Двигатели для жестких дисков предназначены для работы на высоких скоростях в течение длительного периода времени.Этот принцип сам по себе проблематичен вначале и легко может привести к неисправности. Некоторое время назад в индустрии жестких дисков ведущей тенденцией было постоянное увеличение скорости двигателя, поэтому некоторые устройства работали на скорости выше 15000 об / мин .
Контроль скорости , то есть точное достижение и поддержание желаемых оборотов в минуту, очень важно выполнять для реализации основных функций жестких дисков – чтения и записи данных.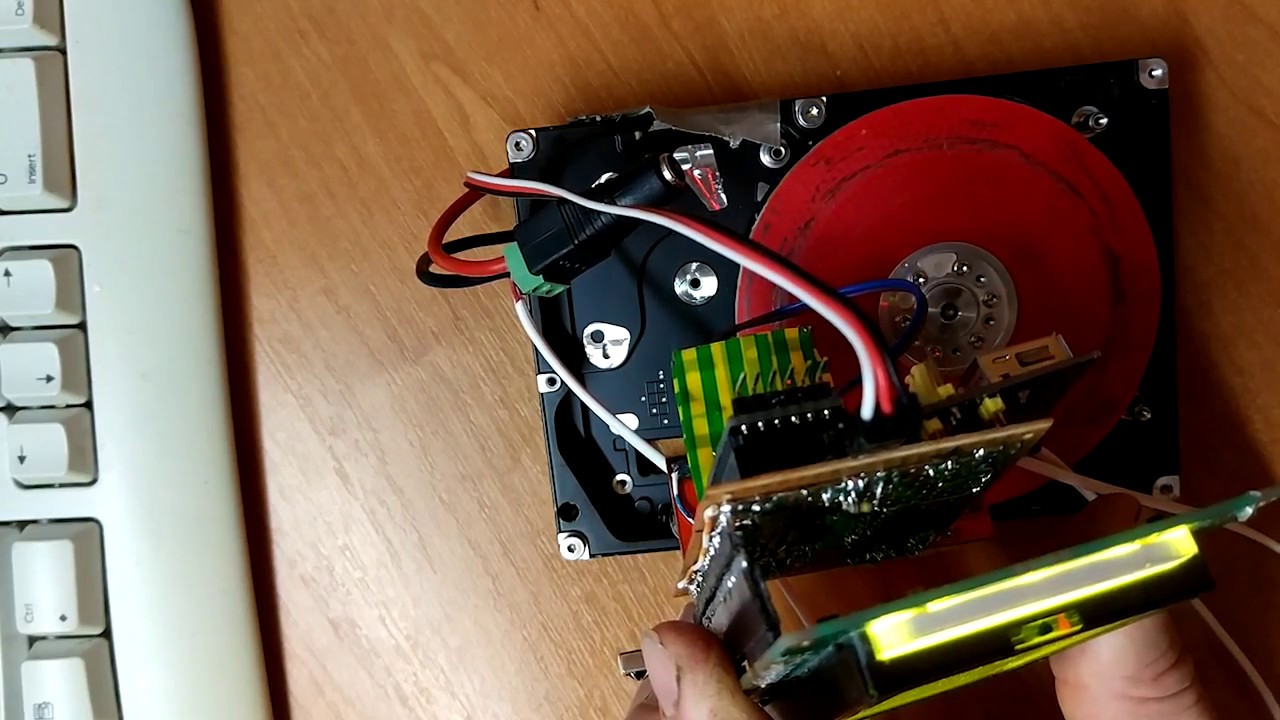 С увеличением емкости жестких дисков, т.е.е. с увеличением плотности записи данных на пластинах регулирование скорости становится все более сложной задачей.
С увеличением емкости жестких дисков, т.е.е. с увеличением плотности записи данных на пластинах регулирование скорости становится все более сложной задачей.
Дополнительные условия, устанавливаемые перед двигателями шпинделя: низкий уровень шума, низкая стоимость, низкое энергопотребление и меньший нагрев во время работы. Все вышеперечисленные условия выполнены при использовании бесщеточных электродвигателей постоянного тока . Эти двигатели имеют ротор с постоянным магнитом, при этом ток проходит через обмотки статора, что приводит к вращению ротора.
Инвертор , пришедший на смену классическому коммутатору, управляется током, который проходит через катушки статора. Датчик положения ротора контролирует работу самого инвертора.
Фото: Конфигурация двигателя шпинделя (DiamondMax 10): сердечник статора, держатель диска, ось ротора, уровень диска
Вращающимися частями двигателей шпинделя являются ротор (шпиндель) и опорный диск (шляпка) с постоянным магнитом на себе.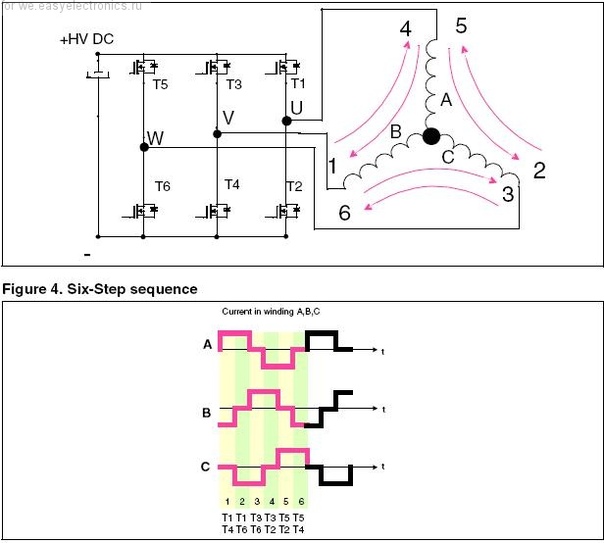 Сердечник статора жестко привязан к корпусу жесткого диска. Раньше использовались шариковые подшипники, а теперь вращение шпиндельных двигателей ГНБ обеспечивают почти исключительно жидкостные подшипники. Держатель диска вместе с уровнем диска жестко прикреплен к валу ротора. Таким образом, пластина (и) жесткого диска вращается вместе с ротором шпинделя.
Сердечник статора жестко привязан к корпусу жесткого диска. Раньше использовались шариковые подшипники, а теперь вращение шпиндельных двигателей ГНБ обеспечивают почти исключительно жидкостные подшипники. Держатель диска вместе с уровнем диска жестко прикреплен к валу ротора. Таким образом, пластина (и) жесткого диска вращается вместе с ротором шпинделя.
На старых моделях жестких дисков нагрузка на двигатель главного шпинделя возникала в момент запуска из-за трения между головками чтения / записи и поверхностью посадочных зон на пластинах.Внедрение системы пандусной парковки полностью решило эту проблему. В настоящее время нагрузка на двигатель главного шпинделя составляет , сила трения , что является результатом высокой скорости вращения пластин.
Инженерные группы ведущих производителей жестких дисков активно работают над решением этой проблемы. Наиболее часто упоминаемым решением является разработка жестких дисков с герметичным корпусом, заполненным гелием .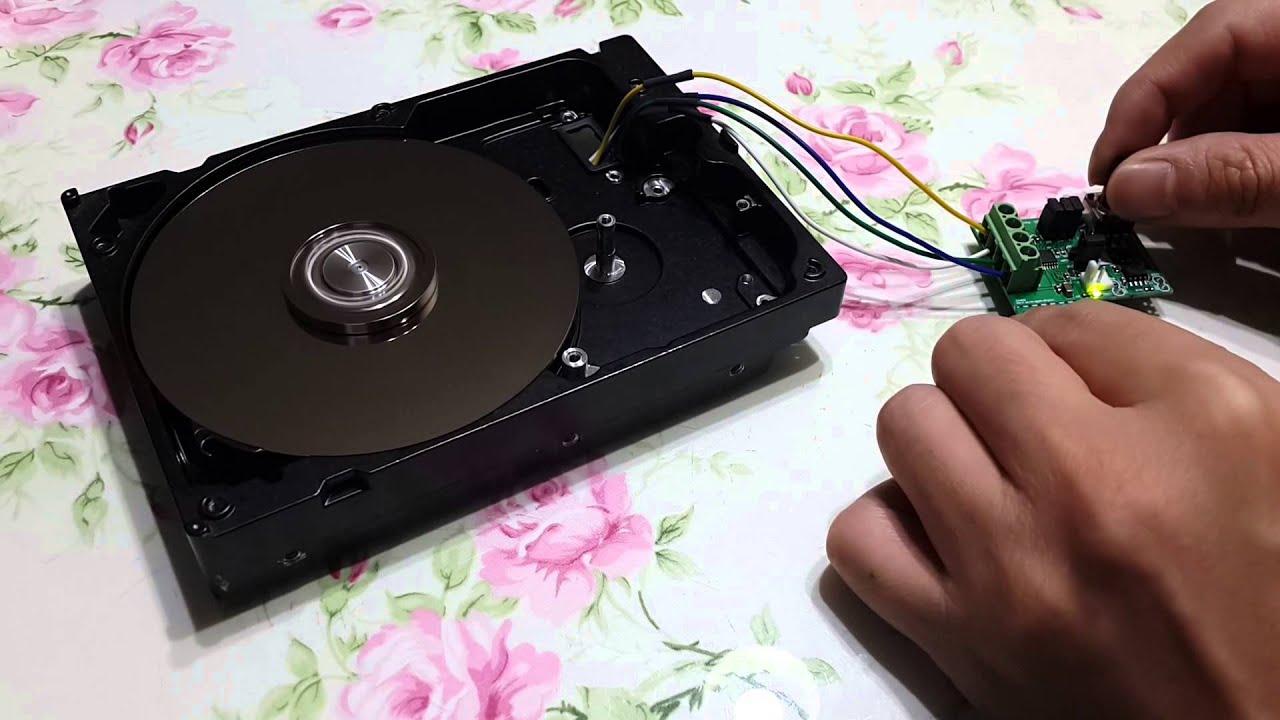 Идея состоит в том, что если пластины будут вращаться в контролируемой зоне с меньшим трением ветра, нагрузка на двигатель шпинделя будет значительно снижена, что может привести к увеличению числа оборотов в минуту и повышению производительности жестких дисков.
Идея состоит в том, что если пластины будут вращаться в контролируемой зоне с меньшим трением ветра, нагрузка на двигатель шпинделя будет значительно снижена, что может привести к увеличению числа оборотов в минуту и повышению производительности жестких дисков.
Жарко Дамьянович
HddSurgery
Как починить двигатель жесткого диска
Когда жесткий диск выходит из строя, это может нервировать, особенно если не было выполнено резервное копирование данных. Эта проблема может возникать по множеству причин. К сожалению, нет надежного способа починить жесткий диск или его двигатель, но есть много методов, которые вы можете попробовать, скрестив пальцы, прежде чем отправлять диск для дорогостоящего восстановления данных.
Осторожно извлеките жесткий диск из компьютера. Способы сделать это будут различаться от компьютера к компьютеру. Чтобы определить источник проблемы, вам нужно будет осмотреть различные детали и детали. После каждого шага по исправлению пытайтесь загрузить жесткий диск в обычном режиме и наблюдайте за изменениями в его поведении.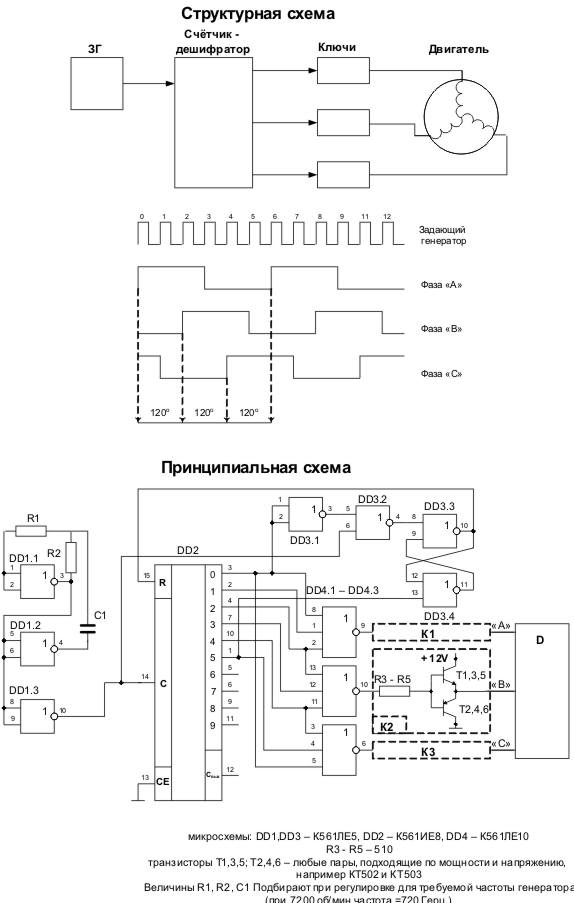
Осмотрите диск снаружи на предмет очевидных повреждений, таких как погнутые детали или следы ожогов. Это может указывать на неправильную установку, проблемы с питанием или неправильное подключение к материнской плате.
Попробуйте заморозить жесткий диск на ночь. Этот метод был встречен с переменным успехом – он не всегда работает. Если он действительно оживит жесткий диск, это будет только на короткое время, поэтому используйте возможность перенести с него все данные на новый безопасный внешний жесткий диск.
Слегка постучите кулаком по краю мотора жесткого диска. Не ударяйте достаточно сильно, чтобы повредить привод; просто слегка постучите, чтобы увидеть, заставит ли это снова начать вращение.
Выкрутите винты, крепящие плату контроллера к задней части привода, чтобы открыть плату. Если при первом запуске жесткого диска отображается индикатор питания, например, шпиндель на мгновение движется, возможно, проблема связана с одним из контактов. Используйте малярную ленту, чтобы покрыть каждый штырь по отдельности (предотвращая подключение к материнской плате), пока не найдете тот, который, будучи закрытым, позволяет приводу вращаться.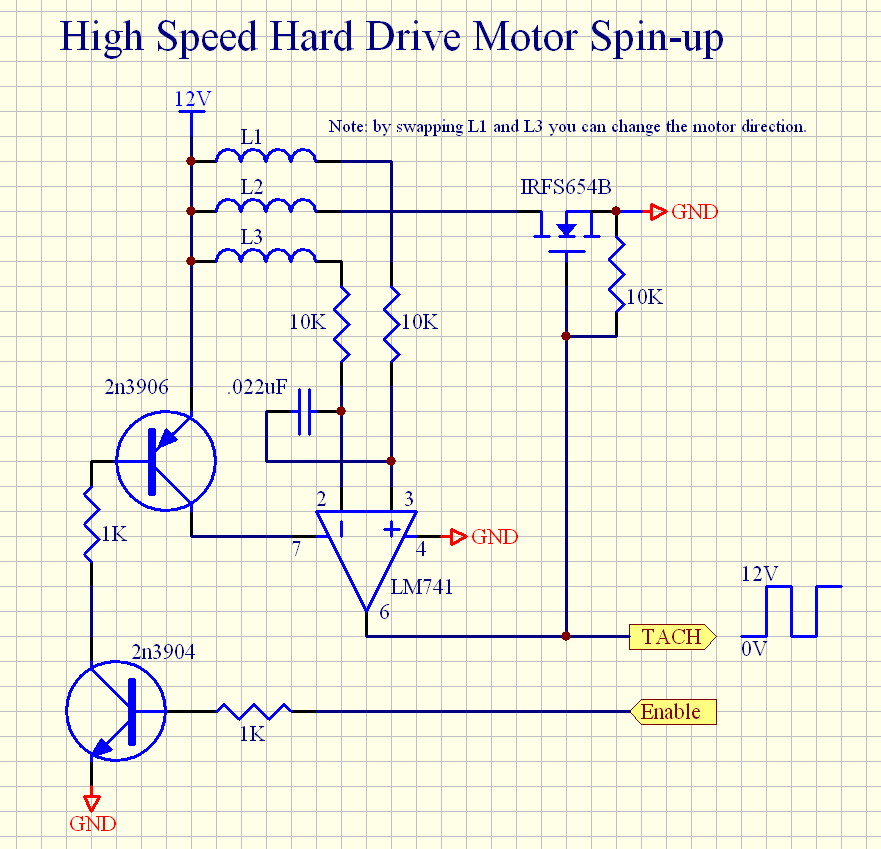
Замените штифт на другой такого же размера и формы. Лучше всего найти запасной штифт от другого жесткого диска той же марки и модели.Если у вас нет одного доступного, проверьте другие периферийные устройства вашего компьютера или обратитесь в компанию по ремонту компьютеров за запасными частями.
Выполните последнее «домашнее» исправление, уронив привод с высоты примерно от 5 до 8 дюймов над поверхностью, чтобы попытаться «толкнуть» его обратно в рабочее состояние. Как и в случае с замораживанием, это метод, который не всегда работает, и его следует использовать с осознанием того, что он на самом деле может еще больше повредить диск. Однако он может перезагружать диск на время, достаточное для восстановления данных.
Обратитесь к специалистам. В крайнем случае проблема может быть в плохой голове. Ее можно заменить рабочей головкой от другого жесткого диска той же модели, но это требует большой тонкости и аккуратности, так как головки являются чрезвычайно чувствительным оборудованием. Обычно рекомендуется доверить эту работу профессионалам в мастерской по ремонту компьютеров.
Обычно рекомендуется доверить эту работу профессионалам в мастерской по ремонту компьютеров.
Отказ двигателя жесткого диска | Восстановить данные с мертвого жесткого диска
Если пластины вашего жесткого диска перестали вращаться, или если ваш жесткий диск издает звуковой сигнал, заикание или стук, возможно, его двигатель шпинделя вышел из строя.Это приводит к полной остановке вашего жесткого диска – иногда в буквальном смысле – и отключает вас от всех данных, которые вы храните на диске.
Если это случилось с вами, не бойтесь – наши специалисты по восстановлению данных могут помочь вам восстановить потерянные данные.
Двигатель неисправен на жестком диске?
Как происходит отказ двигателя жесткого диска?
Высокая скорость вращения пластин жесткого диска создает тонкую воздушную подушку, которая удерживает головки чтения / записи жесткого диска на плаву.Все это происходит потому, что мотор шпинделя жесткого диска безупречно выполняет свою работу. Современные двигатели шпинделей жестких дисков были разработаны так, чтобы вращать диски гораздо тише и эффективнее, чем вы ожидаете.
Современные двигатели шпинделей жестких дисков были разработаны так, чтобы вращать диски гораздо тише и эффективнее, чем вы ожидаете.
Но, как и большинство компонентов жесткого диска, двигатель шпинделя хрупкий и уязвимый. Отказ двигателя шпинделя может произойти по нескольким причинам. Чаще всего это результат физической травмы. Условия окружающей среды или преклонный возраст также могут стать причиной высыхания смазанных подшипников двигателя шпинделя жесткого диска.Без смазки тепло и сопротивление, создаваемые трением, становятся невыносимыми. Это быстро перегорает мотор.
Когда двигатель заклинивает, независимо от того, сколько энергии поступает в него от платы управления, он не может заставить пластины вращаться. Двигатель может издавать тихое жужжание, а жесткий диск может сильно нагреться.
Возможные причины отказа двигателя жесткого диска:
Физическая травма
Если вы уроните или неправильно обработаете жесткий диск во время его работы, головки чтения / записи могут защемить магнитные пластины для хранения данных. Внезапно что-то удерживает тарелки на месте и не дает им вращаться. Двигатель шпинделя пытается раскрутить тарелки, но ничего не может поделать. Это также может произойти, если вы перевернете жесткий диск или грубо обращаетесь с ним во время работы. Полный отказ двигателя шпинделя может быстро наступить, если вы продолжите пытаться запустить привод.
Внезапно что-то удерживает тарелки на месте и не дает им вращаться. Двигатель шпинделя пытается раскрутить тарелки, но ничего не может поделать. Это также может произойти, если вы перевернете жесткий диск или грубо обращаетесь с ним во время работы. Полный отказ двигателя шпинделя может быстро наступить, если вы продолжите пытаться запустить привод.
Многие современные жесткие диски имеют встроенные функции безопасности для предотвращения такой ситуации. Акселерометр может определить, когда жесткий диск перешел в состояние свободного падения, и быстро сдвинуть головки чтения / записи с пластин.Это может вывести жесткий диск из строя. Но вероятность того, что двигатель будет захвачен, а пластины, на которых хранятся важные данные, будут повреждены, намного ниже.
Внезапная потеря мощности
Когда жесткий диск отключается нормально, воздушная подушка медленно рассеивается, а пластины медленно останавливаются. Головки чтения / записи имеют достаточно времени, чтобы переместиться в исходное положение подальше от пластин. Но если жесткий диск внезапно теряет мощность, воздушная подушка может исчезнуть до того, как головки смогут переместиться в безопасное место, поскольку пластины резко остановятся.Головки в конечном итоге разбиваются о поверхность пластин.
Но если жесткий диск внезапно теряет мощность, воздушная подушка может исчезнуть до того, как головки смогут переместиться в безопасное место, поскольку пластины резко остановятся.Головки в конечном итоге разбиваются о поверхность пластин.
В следующий раз, когда вы включите жесткий диск, мотор шпинделя попытается раскрутить пластины. Но головы слишком крепко держатся за них. Попытка запустить привод может привести к повреждению диска и отказу двигателя шпинделя.
Старость / условия окружающей среды
Двигатели жестких дисков, как и большинство механических объектов, со временем изнашиваются. Точно так же они могут длиться 6 месяцев или 6 лет. Жесткие диски, подверженные затоплению или сильному нагреву, могут быстрее выйти из строя двигателя.
Как происходит отказ подшипника жесткого диска?
Жесткие диски запечатаны очень плотно, но не герметично. В частности, на лицевой панели есть крошечное отверстие для дыхания. Всегда есть предупреждающий ярлык, говорящий, что не стоит скрывать это. Но если инородные загрязнения настолько опасны для жесткого диска, почему вообще там дыра?
Но если инородные загрязнения настолько опасны для жесткого диска, почему вообще там дыра?
Это отверстие предназначено для обеспечения одинакового давления воздуха внутри и снаружи привода.В противном случае головки жесткого диска могут упасть слишком близко к поверхности пластин. За этим отверстием находится тканевый фильтр. Этот фильтр может не допускать попадания любых загрязнений, кроме мельчайших. К сожалению, даже самые мелкие загрязнения могут накапливаться с годами и повредить смазанные подшипники двигателя шпинделя.
Неисправность двигателя шпинделя также может быть вызвана условиями окружающей среды. Длительное воздействие на жесткий диск чрезмерной влажности и тепла может привести к выходу смазанных подшипников из строя.Если это произойдет, трение перегрузит двигатель и сожжет его.
Почему стоит выбрать Gillware для услуг по восстановлению данных при отказе двигателя жесткого диска?
Процедуры восстановления RAID-6 выполняются в нашей сертифицированной ISO-5 чистой зоне.
Восстановление данных с жесткого диска с неисправным двигателем жесткого диска может быть трудным. Во многих случаях поврежден не только двигатель. Отказ мотора может вызвать или может быть вызван эффектом домино отказа. Повреждение двигателя жесткого диска может быть неотъемлемой частью с поврежденными головками чтения / записи и поврежденными пластинами.Для ремонта требуется интенсивная работа в чистом помещении.
Эта интенсивная работа в чистом помещении может принимать форму замены головок чтения / записи, полировки пластин или замены двигателя шпинделя жесткого диска и шасси. Иногда застрявший мотор жесткого диска может открепиться. Но в случаях, когда двигатель жесткого диска полностью вышел из строя, пластины жесткого диска необходимо снять и поместить в совместимое шасси с исправным двигателем. Эти операции всегда выполняются нашими квалифицированными и хорошо обученными техниками и инженерами по восстановлению данных в чистых помещениях.
Более тонкий двигатель с жестким диском | Корпорация Nidec
Тонкие ноутбуки, ставшие возможными благодаря достижениям в конструкции двигателей с жестким диском
Конструкция тонкого ПК требует использования более тонких компонентов, и Nidec, мировой лидер на рынке двигателей шпинделя для жестких дисков, поддерживает эволюцию ноутбуков, предлагая более тонкие двигатели.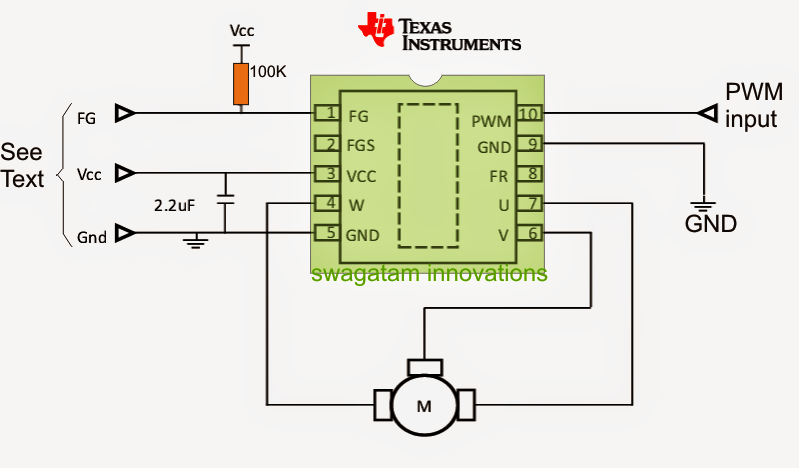
В настоящее время жесткие диски толщиной 7 мм широко используются в ноутбуках. Толщина двигателя шпинделя, встроенного в жесткий диск, составляет от 70% до 75% толщины жесткого диска, в результате чего толщина двигателей 7-миллиметровых жестких дисков составляет примерно 5 мм.Самым большим препятствием на пути к успешной конструкции тонкого двигателя было выделение достаточного пространства для магнитных цепей и подшипников для поддержки ротора. Если просто уменьшить размер магнитной цепи, желаемая магнитная сила не может быть получена. Кроме того, подшипники вокруг вала длиной в несколько миллиметров должны быть жесткими, чтобы один или два 2,5-дюймовых диска могли вращаться с постоянной скоростью 5400 или 7200 об / мин. Другими словами, уменьшенного размера недостаточно. поддерживаться или даже улучшаться одновременно.
Например, двигатели для жестких дисков толщиной 9,5 мм, которые правили рынком до появления 7-мм жестких дисков, изначально использовали внутренний стопор, чтобы удерживать вал на месте. Однако, чтобы создать лучшую продукцию, чем у конкурентов, мы радикально изменили конструкцию наших двигателей и переместили стопор за пределы вала вместо разработки более тонкого внутреннего стопора. Таким образом, мы вносим изменения в саму структуру, когда это необходимо, чтобы построить базовую структуру, которую можно использовать в течение нескольких поколений.Это одна из наших стратегий развития в области ИТ, где скорость оценки чрезвычайно высока.
Однако, чтобы создать лучшую продукцию, чем у конкурентов, мы радикально изменили конструкцию наших двигателей и переместили стопор за пределы вала вместо разработки более тонкого внутреннего стопора. Таким образом, мы вносим изменения в саму структуру, когда это необходимо, чтобы построить базовую структуру, которую можно использовать в течение нескольких поколений.Это одна из наших стратегий развития в области ИТ, где скорость оценки чрезвычайно высока.
Встроенный стопор вынесен за пределы вала.
В поколении 9,5 мм конструкция была изменена, чтобы вывести стопор вала из вала. Основная причина, по которой мы можем удерживать позицию № 1 в мире, – это наша производственная стратегия, основанная на долгосрочной перспективе благодаря интеграции дизайна и разработки, а также массовому производству. В дополнение к жестким дискам толщиной 7 мм, которые производятся серийно с 2010 года, Nidec также может производить жесткие диски толщиной до 5 мм. Имея долю на мировом рынке в 80%, мы поставляем нашу продукцию по всему миру, внимательно следя не только за характеристиками отдельных продуктов, но и за всем процессом контроля качества. Мы также планируем массовое производство даже на ранней стадии разработки продукта и рассматриваем возможность продолжения продукта до следующего поколения при принятии проектных решений.
Имея долю на мировом рынке в 80%, мы поставляем нашу продукцию по всему миру, внимательно следя не только за характеристиками отдельных продуктов, но и за всем процессом контроля качества. Мы также планируем массовое производство даже на ранней стадии разработки продукта и рассматриваем возможность продолжения продукта до следующего поколения при принятии проектных решений.
Звуки неисправных жестких дисков и их значение для восстановления жесткого диска
Когда вы потеряли доступ к своим данным, одним из первых и наиболее полезных шагов, которые вы можете предпринять для определения причины отказа жесткого диска , является прослушивание вашего жесткого диска.Звуки, которые он издает при первом включении питания, могут дать много информации о том, что пошло не так.
Цель этой короткой статьи – предоставить звуковые образцы жестких дисков, которые испытали некоторые из наиболее распространенных форм отказа физических жестких дисков.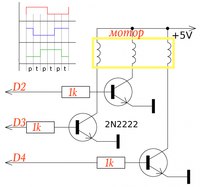 Звуки здесь взяты из задач восстановления жесткого диска, когда весь доступ к пользовательским данным был утерян. Если ваш жесткий диск издает странные звуки, но у вас все еще есть доступ к вашим данным, сначала скопируйте все ваши важные данные во второе место (затем вы можете исследовать странные звуки на досуге).
Звуки здесь взяты из задач восстановления жесткого диска, когда весь доступ к пользовательским данным был утерян. Если ваш жесткий диск издает странные звуки, но у вас все еще есть доступ к вашим данным, сначала скопируйте все ваши важные данные во второе место (затем вы можете исследовать странные звуки на досуге).
Первая задача – извлечь неисправный жесткий диск из корпуса компьютера, чтобы вы могли слушать его, не отвлекая охлаждающих вентиляторов / других жестких дисков компьютера. Самый простой способ сделать это – просто протянуть кабель питания к жесткому диску, как показано ниже (если кабели питания достаточно длинные для этого).
Попробуйте прислушаться к отключению питания жесткого диска вдали от других источников шума.Если это невозможно, поднесите ухо как можно ближе к жесткому диску или купите дешевый стетоскоп (на ebay можно купить его за несколько фунтов).
Как звучит нормальный запуск жесткого диска?
При подаче питания привод должен сначала вращать пластины внутри шасси, обычно это звучит как низкий гул, который нарастает по мере увеличения скорости вращения пластин. Это будет сопровождаться короткой серией тикающих / царапающих звуков, когда головки покидают свое припаркованное положение и начинают обыскивать пластины; обычно вам придется поднести уши очень близко к приводу, чтобы обнаружить это. Головки не будут двигаться, пока пластины не достигнут своей полной скорости вращения, задержка между гудением, когда пластины дисковода начнут раскручиваться, и пластинами, сделавшими свой первый ход, может варьироваться от кажущегося почти мгновенного до 10 секунд или больше в зависимости от типа привода.Первоначальный шум от голов должен длиться не более нескольких секунд, а затем привод должен стихнуть. В этот момент звуки здорового диска будут представлять собой устойчивый гул от вращения диска и периодические тикающие / царапающие звуки, исходящие от пластиков через нерегулярные промежутки времени.
Это будет сопровождаться короткой серией тикающих / царапающих звуков, когда головки покидают свое припаркованное положение и начинают обыскивать пластины; обычно вам придется поднести уши очень близко к приводу, чтобы обнаружить это. Головки не будут двигаться, пока пластины не достигнут своей полной скорости вращения, задержка между гудением, когда пластины дисковода начнут раскручиваться, и пластинами, сделавшими свой первый ход, может варьироваться от кажущегося почти мгновенного до 10 секунд или больше в зависимости от типа привода.Первоначальный шум от голов должен длиться не более нескольких секунд, а затем привод должен стихнуть. В этот момент звуки здорового диска будут представлять собой устойчивый гул от вращения диска и периодические тикающие / царапающие звуки, исходящие от пластиков через нерегулярные промежутки времени.
Существует два размера жестких дисков (то есть физические размеры корпуса, а не емкость хранилища). Их обычно называют ноутбуками (или 2,5 дюйма) и настольными компьютерами (или 3,5 дюйма). у каждого свой звук при включении, и каждый из них более уязвим к различным формам отказа жесткого диска.Ниже приведены примеры звуков запуска исправных дисков 2,5 и 3,5 дюйма. Нажмите на ссылки ниже, чтобы услышать их (вам потребуется высокая громкость)
у каждого свой звук при включении, и каждый из них более уязвим к различным формам отказа жесткого диска.Ниже приведены примеры звуков запуска исправных дисков 2,5 и 3,5 дюйма. Нажмите на ссылки ниже, чтобы услышать их (вам потребуется высокая громкость)
Жесткий диск Toshiba 2,5 ″
Жесткий диск Seagate 3,5 ″
Разные модели (даже разные жесткие диски одной модели) будут иметь разные звуки, но одна и та же последовательность звуков в целом применима ко всем исправным жестким дискам. В конце этой статьи есть подборка других звуков исправного запуска жесткого диска.
Как звучит жесткий диск, пострадавший от физического сбоя?
Как вы могли догадаться, это будет зависеть от характера отказа жесткого диска. Для целей данной статьи мы рассмотрим 3 сценария:
1. На жестком диске повреждены головки чтения / записи.
2. Заклинило двигатель опорного диска, который должен вращать пластины внутри корпуса жесткого диска.
3. Головки чтения / записи врезались в пластины и теперь не позволяют жесткому диску раскручиваться.
Для быстрого знакомства с анатомией жесткого диска прочтите нашу статью здесь.
Отказ жесткого диска был вызван отказом головок чтения / записи:
В этом случае жесткий диск обычно сначала раскручивает пластины. Как только они наберут скорость, головы попытаются читать с пластин. Они, конечно, не будут читать, и привод обычно сбрасывает головки. Это приводит к сильному щелчку, когда головы ударяются о физический упор на своей стоянке, а затем выходят, чтобы снова попытаться прочитать с тарелок.Эта последовательность будет часто (но не всегда) повторяться до тех пор, пока не будет отключено питание, что приведет к повторяющемуся щелчку:
3,5-дюймовый накопитель Samsung с неисправными головками чтения / записи
Western Digital 3,5-дюймовый накопитель с неисправными головками чтения / записи
Иногда двигатель диска может также перезапускаться между попытками загрузки, и двигатель вращается:
Western Digital Raptor Drive с неисправными головками чтения / записи
Также может случиться так, что сбой жесткого диска принимает следующую форму: он раскручивается, головки пытаются прочитать, но не могут этого сделать, а затем диск просто отключается:
Hitachi 3. 5-дюймовый накопитель с неисправными головками
5-дюймовый накопитель с неисправными головками
Важно понимать, что есть и другие возможные причины этих звуков, помимо повреждения головок чтения / записи.
Повреждение микропрограммы жесткого диска может привести к такому же поведению при повторных попытках загрузки и, следовательно, к идентичным звукам при запуске. Прошивка – это узкоспециализированная область восстановления данных, дополнительную информацию можно найти в этой статье. Достаточно сказать, что важно, чтобы поврежденная прошивка была устранена как возможный источник этих звуков, прежде чем предпринимать какие-либо более решительные действия.
В худшем случае эти звуки вызваны физическим повреждением поверхности опорного диска. Это могло произойти либо в результате удара головок по пластинам (обычно при ударе или падении жесткого диска), либо в результате деградации поверхности пластин, что привело к отламыванию чешуек самого диска. Повреждение диска – особенно плохая новость, потому что обычно поврежденная область диска, в свою очередь, разрушает головки чтения / записи. Пластины обычно вращаются со скоростью от 4200 до 10000 оборотов в минуту, всего лишь на крошечной доле миллиметра ниже головок, поэтому малейшее повреждение поверхности диска похоже на врезание тонких головок в кирпичную стену на высокой скорости.Повреждение диска означает, что нет смысла заменять вышедшие из строя головки, потому что новый набор головок постигнет та же участь, когда они попадут в поврежденную область диска.
Пластины обычно вращаются со скоростью от 4200 до 10000 оборотов в минуту, всего лишь на крошечной доле миллиметра ниже головок, поэтому малейшее повреждение поверхности диска похоже на врезание тонких головок в кирпичную стену на высокой скорости.Повреждение диска означает, что нет смысла заменять вышедшие из строя головки, потому что новый набор головок постигнет та же участь, когда они попадут в поврежденную область диска.
Когда ваш жесткий диск издает такие звуки, мало что можно сделать для восстановления жесткого диска дома или через неспециализированную компанию по восстановлению данных. Требования к такому приводу:
– Убедитесь, что микропрограмма жесткого диска не повреждена (для этого требуется специальное оборудование и опыт).
– Осмотрите как можно большую площадь поверхности диска на предмет физических повреждений (конечно, это никогда не должно производиться в условиях чистой комнаты).
– Если возможно, получите подходящий донорский жесткий диск и выполните замену головки чтения / записи.
Отказ жесткого диска из-за заклинивания опорного диска:
Это почти всегда результат физического удара по диску, хотя многие люди шокированы, когда узнают, насколько легкий удар требуется.Мы видели, как приводы страдают от заклинивания опорного диска, когда жесткий диск просто упал на бок (в отличие от падения с высоты). Гораздо чаще внешний жесткий диск, чем тот, который установлен в корпусе компьютера, страдает от этой формы отказа жесткого диска по той простой причине, что такие диски с большей вероятностью получат физический урон. Также гораздо чаще поражаются жесткие диски для настольных ПК с диагональю 3,5 дюйма. Диски размером 2,5 дюйма для портативных компьютеров редко страдают от заклинивания опорных дисков.
В этом случае подшипник двигателя буквально заклинивает, и при подаче мощности пластины привода не могут раскручиваться. Обычно пульс ощущается через шасси каждую секунду или две, когда привод пытается (но терпит неудачу) запустить двигатель опорного диска. Этот пульс обычно сопровождается коротким гудением:
Этот пульс обычно сопровождается коротким гудением:
Seagate, 3,5-дюймовый мотор для опорных дисков
Если на диске заклинило двигатель опорного диска, то для восстановления жесткого диска специалисту, имеющему доступ к чистой комнате, необходимо выполнить процедуру, называемую заменой пластин.Электродвигатель пластин встроен в шасси почти всех жестких дисков, поэтому необходимо приобрести подходящий донорский жесткий диск и переместить пластины данных, головки чтения / записи и печатную плату с исходного неисправного диска на донорское шасси. для того, чтобы использовать его двигатель диска. Это сложная процедура даже для экспертов, и у нее есть реальные шансы на успех только в том случае, если не было повреждений диска, вызванного первоначальным воздействием на жесткий диск.
Пластины и головки были удалены, оставив двигатель диска (обозначен красной стрелкой).Звуки и ощущения от жесткого диска с заклинившим двигателем опорного диска почти неотличимы от последнего физического отказа, описанного в этой статье:
Отказ жесткого диска из-за того, что головки чтения / записи застревают на пластинах:
Иногда головки чтения / записи могут воздействовать на пластины данных и впоследствии прилипать к ним (более подробное описание этой проблемы см. В нашей статье здесь).Поскольку головки буквально прилипают к пластинам, они не позволяют им раскручиваться при включении питания.
В нашей статье здесь).Поскольку головки буквально прилипают к пластинам, они не позволяют им раскручиваться при включении питания.
Головки 2,5-дюймового накопителя Western Digital застряли в пластинах
Этот режим отказа чаще встречается у портативных компьютеров (2,5 дюйма), чем у полноразмерных жестких дисков. Хотя эти звуки обычно встречаются при неисправных 3,5-дюймовых дисках, в девяти случаях из десяти причиной является заклинивание двигателя опорного диска.
Первой задачей, которую необходимо выполнить, является снятие головок чтения / записи с привода.Излишне говорить, что это должен делать только эксперт в среде чистой комнаты, попытка сделать это дома почти наверняка будет означать конец всех возможных надежд на восстановление данных. Головки необходимо снимать так, чтобы не повредить поверхность опорного диска.
Чаще всего головки повреждаются при ударе пластинами, и их необходимо будет заменить головками от подходящего донорского привода.
Образцы звука, представленные в этой статье, являются репрезентативными, каждый привод имеет свой уникальный звук при включении.Вот еще несколько примеров:
Еще несколько примеров звуков исправного жесткого диска:
Здоровый диск Seagate 3,5 ″
Здоровый накопитель Fujitsu 2,5 ″
Здоровый накопитель Seagate 2,5 ″
Еще несколько примеров звуков сбоя жесткого диска:
Жесткий диск Hitachi 2,5 ″ с повреждением головки
Диск Seagate 3,5 ″ с повреждением головки
Western Digital 2,5 дюйма с поврежденной головкой
Жесткий диск Hitachi 2,5 ″ с головками, прикрепленными к пластинам
Хотя можно видеть, что возможности самостоятельного восстановления не так велики, когда ваш жесткий диск издает шумы, описанные в этой статье, мы надеемся, что это будет полезно для определения того, что именно привело к отказу физического жесткого диска и его последующему отсутствию. доступа к вашим важным данным.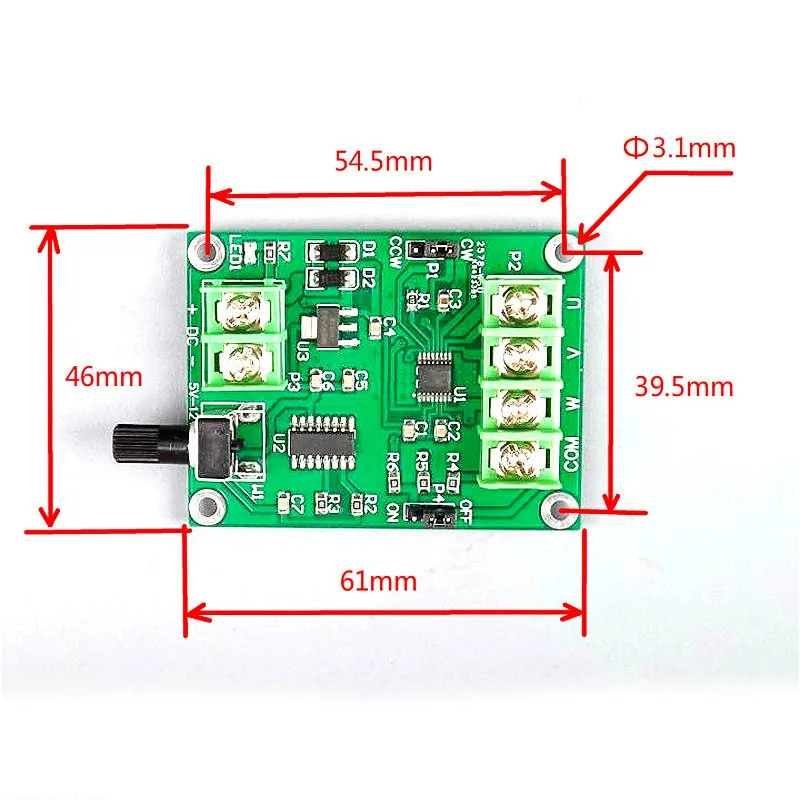
Использование приводных двигателей
По сценарию Томи Энгдаля
Зачем использовать комплектующие от старых накопителей
Вы можете спросить, зачем использовать компоненты от старых дисководов.
Ответ в том, что в дисках много дорогих компонентов.
а старые плохие диски можно достать бесплатно или очень дешево.
Они являются хорошими источниками для следующих компонентов, не
много усилий:
1. Маленькие шаговые двигатели и контроллеры
2. Оптические датчики или микропереключатели
3. Точно регулируемый двигатель постоянного тока
4.Полезные точные механические детали для небольших проектов
Описание интерфейса дисковода
Распиновка разъема питания
В обычных дисководах для гибких дисков обычно используются источники питания +12 В и + 5 В.
Они могут нагружать каждую линию питания током менее 100 мА.
даже более чем на 1 А. Это зависит от модели дисковода.
Вот распиновка разъема питания, если посмотреть на разъем типа CEE.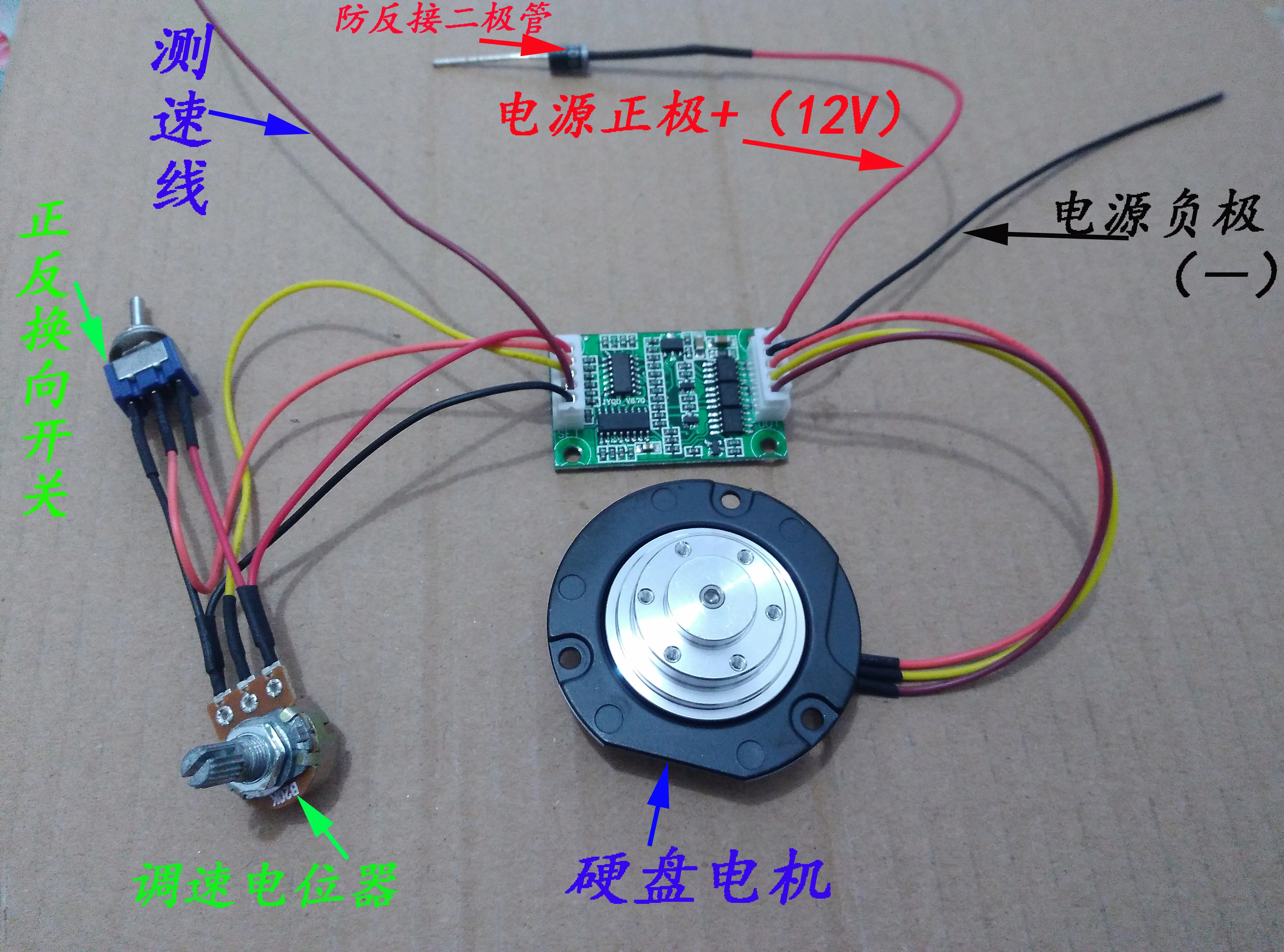 на обратном пути:
на обратном пути:
_______ / \ | 1 2 3 4 | | _________ | Функция контакта 1 +5 В 2 Земля 3 Земля 4 +12 В
Интерфейс дисковода Шугарта
В следующей таблице показаны сигналы наиболее часто используемых компьютеры с дисководом для гибких дисков.Распиновка как-то де-факто и использование определенных сигналов может отличаться в разных системы. Этот интерфейс используется как на ПК, так и на компьютерах Amiga, но использование и обработка различных сигналов различаются. В любом случае эти сигналы всегда являются сигналами уровня TTL.
Контакт Функция 1 GND 2 Выбор высокой плотности 4 Нагрузка на голову / Используется, Извлечение 6 Выбор диска 3 8 Индексный импульс + 10 Выбор привода 0 / Двигатель включен A 12 Выбор диска 1 / Выбор диска B 14 Выбор диска 2 / Выбор диска A 16 Мотор включен / Мотор включен B 18 Направление 20 Шаг 22 Запись данных 24 Запись разрешена 26 Track Zero + 28 Защита от записи + 30 Чтение данных + 32 Выбрать голову 34 Диск изменен + / Готов + 3-33 Нечетные контакты - GND
Сигналы дисковода PC / AT
Компьютеры PC / AT используют эти сигналы дисковода следующим образом. В этой системе приводы имеют перемычку типа A или B в зависимости от
ситуация. Обычно в системах ПК и AT используется специальный кабель, который
Включает отдельные положения приводов A и B и выбирает сигналы
между разъемами дисковода. Это позволяет иметь
оба диска должны быть подключены как диск A, и один диск работает в этом
путь как A и другой как B.
В этой системе приводы имеют перемычку типа A или B в зависимости от
ситуация. Обычно в системах ПК и AT используется специальный кабель, который
Включает отдельные положения приводов A и B и выбирает сигналы
между разъемами дисковода. Это позволяет иметь
оба диска должны быть подключены как диск A, и один диск работает в этом
путь как A и другой как B.
Контакт Функция Направление 1 GND 2 SEL с высокой плотностью ??? 8 Индексный импульс от привода 10 Мотор на А, чтобы ехать 12 Drive выберите B для движения 14 Привод выберите A, чтобы ехать 16 Motor On B для движения 18 Направление движения 20-шаговый импульс для движения 22 Запись данных на диск 24 Запись разрешена на диск 26 Track Zero с привода 28 Защита от записи с диска 30 Чтение данных с диска 32 Выберите голову для движения 34 Диск поменял ??? 3-33 Нечетные контакты - GND
Как использовать шаговый двигатель дисковода
Какие шаговые двигатели используются в дисковых накопителях?
В дисководах гибких дисков используются шаговые двигатели для управления чтением / записью. положение головы.Даже в ранних жестких дисках также использовались степперы, но
в настоящее время жесткие диски заменили тепперы на сервопривод звуковой катушки
моторы.
Шаговые двигатели, используемые в дисководах для гибких дисков 5 1/4 дюйма, обычно перемещают Прочтите / прочтите голову с помощью колеса и пружинного механизма, который работает достаточно хорошо. Согласно одному информационному источнику, эти шаговые двигатели используются в Дисковые накопители обычно имели 200 или 400 шагов на оборот в моделях. 200 шагов на оборот используются модели стандартной плотности. (40 дорожек на диск) диски.Флоппи-дисководы высокой плотности имеют 80 дорожек, и они используют Шаговые двигатели 400 шагов на оборот. Другой источник информации говорит, что в старых дисках степперы каждый шаг составлял 3,6 градуса, что означает, что для полного поворота требуется 100 шагов, в приводах HD каждый шаг составлял 1,8 градуса, т.е. 200 шагов. Я сам не рассчитал точный номер шага, поэтому Я не совсем уверен, что из этого правильно (возможно, на разных драйверах могут использоваться разные двигатели, там была разная механика привода)
Какой бы тип у вас ни был, эти моторы
очень полезны для ваших собственных проектов. Шаговые двигатели обычно используют
Питание +12 В, но некоторые новые маломощные приводы используют источник питания +5 В.
для вождения степперов.
Шаговые двигатели обычно используют
Питание +12 В, но некоторые новые маломощные приводы используют источник питания +5 В.
для вождения степперов.
В небольших дисководах для гибких дисков размером 3 1/2 дюйма обычно используются винтовые механизмы, где двигатель вращает винтоподобную ось, которая перемещает головку чтения / записи. Этот тип механики позволяет изготавливать диски меньшего размера. и в зависимости от характеристик винта двигатель может иметь больший шаги. Эти двигатели обычно питаются от источника +5 В, потому что многие современные приводы размером 3 1/2 дюйма используют только источник питания +5 В.
Как использовать эти двигатели в своих проектах
Шаговые двигатели весьма полезны для робототехники, плоттеров и контролировать проекты. Шаговые двигатели – это точный способ изготовления желаемые механические движения. Шаговые моторы не очень мощный или быстрый (около 300 шагов / сек).
Вы можете построить свой собственный контроллер или использовать готовые контроллеры с
их. Вам просто нужно указать тип, схему подключения и рабочее напряжение
шаговые двигатели, чтобы иметь возможность их использовать. К сожалению, шаговые двигатели
не самые простые в управлении типы двигателей и готовые контроллеры обычно
довольно дорого.Если вы хотите сделать свой контроллер для степпера
двигатель снят с дискового накопителя, затем взгляните на
http://www.doc.ic.ac.uk/~ih/doc/stepper/.
Вам просто нужно указать тип, схему подключения и рабочее напряжение
шаговые двигатели, чтобы иметь возможность их использовать. К сожалению, шаговые двигатели
не самые простые в управлении типы двигателей и готовые контроллеры обычно
довольно дорого.Если вы хотите сделать свой контроллер для степпера
двигатель снят с дискового накопителя, затем взгляните на
http://www.doc.ic.ac.uk/~ih/doc/stepper/.
Когда вы только что вынули мотор из дисковода, вы могли думали, что внутри должен быть также шаговый контроллер дисковая электроника. Вы правы, что есть контроллер, который способен управлять двигателем. Посылать сигналы довольно просто к этому контроллеру с помощью параллельного порта ПК и небольшой программы.
Как использовать контроллер в электронике дисковода
Контроллер в электронике дисковода может быть успешно
используется следующим образом:
1.Электронике требуется + 5 В для работы и обычно +12 В для двигателей
2. Если дисковый привод имеет функцию автоматического отслеживания нуля на
powerup, вы должны отключить эту опцию, если вы не хотите использовать это
вариант и отслеживание нуля в вашем проекте. Этот вариант
можно найти у современных дисководов, но у старых дисководов этого нет. Иногда есть перемычка для включения и выключения этой опции.
3. Убедитесь, что электронике не требуется обнаруживать диск в
привод, чтобы иметь возможность перемещать шаговый двигатель.Этот датчик можно легко
легко сделать, чтобы передать электронике информацию о том, что диск находится в приводе.
Вам нужно только приклеить к датчику скотч или клей, чтобы он
думаю, что диск всегда в приводе. Вы также можете сделать это
отрезав один провод или добавив один дополнительный провод для обхода датчика.
4. Используйте сигнал выбора привода для выбора электроники привода. Затем используйте
импульсные сигналы направления и шага для управления шаговым двигателем.
Управляющие сигналы шагового двигателя интерфейса дисковода
Следующие сигналы используются для управления дисководом. Схема контроллера шагового двигателя.Сначала вам нужно выбрать подключите правильный сигнал выбора привода к земле. Затем вы используете сигнал направления, чтобы выбрать направление, в котором вы хотите, чтобы мотор двигался вперед. Пошаговое управление осуществляется с помощью ступенчатый импульсный сигнал, обычно высокий. Один низкий пульс при пошаговой импульсной линии заставляет двигатель делать один шаг. Убеждаться что импульсные сигналы длиннее 1 микросекунды, и вы не отправляете тогда быстрее, чем двигатель может делать шаги.
Контакт Функция Направление 1 GND 12 Drive выберите B для движения 14 Привод выберите A, чтобы ехать 18 Направление движения 20-шаговый импульс для движения 26 Track Zero с привода 3-33 Нечетные контакты - GND
Существуют ограничения, которые могут выдерживать эти дисковые накопители.Ограничения в основном электромеханические (насколько быстро шаговый мотор может реагировать), но иногда электроника может это ограничивать. Для дисководов, таких как дисковод для гибких дисков NEC FD1155C (высокой плотности) кажется, что минимальное время цикла, необходимое для шагового импульса составляет 6 мс при рабочем цикле 50%. А для NEC FD1053 (низкая плотность) импульс шагового цикла должен быть не менее 10 мс. Для сигнала направления кажется, что привод выберите сигнал направления на положительном фронте ступенчатого сигнала. Не используйте их как абсолютные гарантии, а как общие рекомендации. где начать экспериментировать.
Параллельный порт ПК для интерфейса шагового двигателя
Это простой пример управления шаговым двигателем дисковода. через параллельный порт ПК. Я ожидаю, что привод переключается на как привод A. Номера контактов параллельного порта соответствуют Номер 25-контактного разъема, который находится на задней панели вашего ПК.
Подключите контакт 20 параллельного порта (земля) к контактам 17 и 19 разъема дисковода. (земля). Подсоедините контакт 14 разъема дисковода (выбор дисковода A) к разъему дисковода. 17 (земля).Подключите контакт 2 параллельного порта (D0) к контакту 20 разъема дисковода (шаговый импульс). Подключите контакт 3 параллельного порта (D1) к контакту 18 разъема дисковода (направление).
Параллельный порт (25 контактов) Дисковод (34 контакта)
2 ------------------------- 20
3 ------------------------- 18
+ --- 14
20 --------------------- + --- 17
+ ---- 19
Таким образом, вы сделали кабель, с помощью которого вы можете легко управлять шаговый двигатель с использованием выводов данных параллельного порта D0 и D1.Те пинами можно легко управлять в вашем программном обеспечении, напрямую написав к оборудованию параллельного порта. Вы не можете использовать DOS, BIOS или другие операционные системные функции, потому что этот интерфейс не генерирует квитирование сигнализирует о том, что процедуры необходимы.
Непосредственно управлять параллельным портом очень просто. Сначала вы должны прочитать адрес ввода / вывода из область данных BIOS. Адрес ввода / вывода LPT1 – это 16-битное слово, которое может можно найти по адресу памяти 0008h в сегменте 0040h. Тогда вы просто запишите данные, которые вы хотите отправить на выводы данных параллельного порта, на этот адрес ввода / вывода.Запись может быть легко выполнена с помощью следующих команд в разных языки: out на ассемблере, outp на борланде c и порт на паскале. Вы можете найти более подробную информацию о программировании в моем Интерфейс параллельного порта стал простой статьей. Вы также можете попробовать исходный код Floppystepper C ++ для DOS из архива Circuit Cookbook.
Использование шагового двигателя в качестве постоянно вращающегося двигателя
Шаговые двигатели также могут использоваться в качестве постоянных двигателей в приложениях. где более низкая скорость, которая легко доступна при использовании двигателя постоянного тока с прямым приводом или скорость должна быть очень точно отрегулирована.
Шаговый двигатель с дисковым приводом можно легко использовать в качестве свободно вращающегося двигателя. с помощью контроллера шагового двигателя от дисковода. Вам просто нужно активировать строку выбора диска, а затем выбрать поворот направление с помощью направляющего штифта. Тогда все, что вам нужно, это отправить постоянную тактовый сигнал на шаговый штифт (или регулируемый, если хотите). Подходящее генератор может быть довольно легко изготовлен с использованием, например, микросхемы таймера 555 или от генератора, построенного на логических элементах TTL. Если вы построите небольшую плату с микросхемой 555 (что дает подходящие часы импульсы нужной вам частоты, от нескольких Гц до нескольких сотен Гц) и несколько мест для управления другими сигналами (один контролирует, если часы с 555 попадает на диск, другое направление управления, третий может выбрать диск).С таким контроллером вы можете запускать, останавливать, шаг вперед / назад, вращение … Ничего страшного. Код не нужен!
Использование шаговых двигателей без электроники привода
Шаговые двигатели с дисковым приводом состоят из двух катушек, которые приводят в движение двигатель. в желаемом направлении, когда к этим катушкам подается ток в правильном порядке. Следующие сигналы заставят двигатель степпера бежать в одном направлении. Чтобы двигатель работал в другом направлении необходимо поменять полярность сигналов одной из катушек (два фазных провода).
Катушка 1 сигнализирует
.......... .......
Фаза 1 ..... | | ......... |
Фаза 2 ..... .........
| .......... | | .......
Катушка 2 сигналов
........ .........
Этап 3. | | ........ | | ....
. ........ ....
Фаза 4 | ........ | | ......... |
Сигналы могут быть представлены также в двоичном формате.
Обычная последовательность (1 означает текущий ток, 0 означает обрыв цепи):Фаза 1 00110011 Фаза 2 11001100 Phase3 01100110 Фаза 4 10011001Дуглас В.Джонс разместил в сети проект, как управлять шаговыми двигателями с помощью принтера порт и некоторая простая электроника под названием Пример работающего шагового двигателя. Это часть учебника «Управление шаговыми двигателями».
Как использовать вращающийся двигатель дисковода
Моторы дискового привода – довольно хорошие моторы, довольно точные скорости. система контроля. Двигатели дисковода вращают диск со скоростью 300 или 360 об / мин. скорость. Стандартные диски используют скорость 300 об / мин, но диски высокой плотности используют 360 оборотов в минуту. об / мин или выбираемая частота вращения двигателей 300/360 об / мин.
Сигналы управления двигателем в интерфейсе дисковода
Вы можете заставить двигатель дисковода вращаться, когда вы включите оба выбор привода и двигатель на сигналах, переводя эти сигналы в низкий логическое состояние. Это легко сделать, подключив оба сигнала сигнализировать о земле.
Сигнал высокой плотности может иметь какое-то отношение к выбору скорость двигателя в дисководах с двухскоростными (300/360 об / мин) двигателями. Я в этом не нуждался и еще не разобрался.
Контакт Функция Направление 1 GND 2 SEL с высокой плотностью ??? 10 Мотор на А, чтобы ехать 12 Drive выберите B для движения 14 Привод выберите A, чтобы ехать 16 Motor On B для движения 3-33 Нечетные контакты - GND
Прочие полезные компоненты от дисководов
Дисковые накопители также являются неплохим источником для других компонентов.Когда вы вынимаете моторы из дисковода, вы можете легко другие компоненты также. Обычно есть оптические сенсоры или микровыключатели. в дисководе, чтобы обнаружить язычок защиты от записи. Эти компоненты полезные датчики в ваших схемах робототехники с шаговым двигателем. Многие вращающиеся двигатели с прямым приводом используют датчики Холла для измерения скорость вращения. Это может быть весьма полезный компонент, если вы понимаете как это связано.
Как насчет использования шаговых двигателей с жестким диском?
Многие старые жесткие диски также имели шаговые двигатели для управления. прочтите / прочтите движение головы.Многие современные двигатели для дисководов использовать системы управления звуковой катушкой, что делает другую историю.
В своих экспериментах я использовал жесткие диски интерфейса ST506 / 412. Это оригинальные жесткие диски IBM PC / AT (обычно называемые дисками MFM). которому нужна была управляющая карта. Современные диски ATA / IDE в основном те же приводы, но электроника контроллера интегрирована в диск электроника привода, что делает их более сложными и трудными для управления.
В основном жесткий диск имеет те же основные элементы, что и гибкий диск. привод: головка чтения / записи, двигатель перемещения головки, двигатель вращения диска, датчики и электроника контроллера.Вы можете использовать эти разные компоненты самостоятельно или использовать управляющую электронику на жестком диске электроника привода. Шаговые двигатели того же типа, что и в гибких дисках. приводов, хотя количество шагов на оборот может быть больше. В приводной вращающийся двигатель – это тот же тип бесприводного двигателя постоянного тока, который используется в современных дисководы гибких дисков, но они работают на гораздо более высокой скорости (около 3000-3600 об / мин).
ST506 / 412 интерфейс жесткого диска
Интерфейс жесткого диска ST506 / 412 – это что-то вроде модифицированной дискеты. интерфейс дисковода.Физический интерфейс в ST506 / 412 состоит из из двух разъемов: 34-контактный разъем управления и 20-контактный разъем для передачи данных. Разъем управления передавал всю информацию об управлении дисководом. и соединитель данных передает данные. Кабель контроллера идет до двух интерфейсов управления жестким диском (может поддерживаться до четырех), но на каждом жестком диске есть это собственный кабель для передачи данных.
Распиновка разъема управления
Все сигналы разъема управления являются сигналами уровня TLL. Они активны в низком состоянии (0 В).1 водить 20 Индекс с диска 22 Готов к поездке 24 Шаг за рулем 26 Диск выберите 1 для движения 28 Диск выберите 2 для движения 30 Диск выберите 3 для движения 32 Диск выберите 4 для движения 34 Направление движения Контакты 1-33 все нечетные контакты заземлены
Разъем данных
Направление функции контакта 1 Диск выбран из диска 3 зарезервировано 4 зарезервировано 7 зарезервировано 9 зарезервировано 10 зарезервировано 13 + MFM Запись данных на диск 14 -MFM Запись данных на диск 17 + MFM Чтение данных с привода 18 -MFM Чтение данных с привода Контакты 2, 4, 6, 8, 11, 12, 15, 16, 19 и 20 являются контактами заземления.
Использование приводов головки жесткого диска
Первоначально положение головы контролировалось шаговый двигатель, который вращался в любом направлении на реагирование на импульсы шагового двигателя и перемещение головы сборка вперед и назад с помощью стойки и шестерня »или путем наматывания и разматывания ленты прикреплены к рычагам привода. Каждый импульс переместился сборку по поверхности в заранее определенных шагах или фиксаторы. Каждый шаг представлял собой местоположение трека и данные должны были быть под головой.
Приводы с головкой, управляемой шаговым двигателем, не подходят для текущая плотность привода и склонность к выравниванию проблемы, вызванные трением, износом, нагревом деформация и отсутствие информации обратной связи необходимо для исправления ошибки позиционирования.В настоящее время на жестких дисках используются приводы звуковых катушек, которые сложнее использовать экспериментаторами.
Я провел несколько экспериментов с использованием шагового привода жесткого диска. электроника двигателя и контроллера в моих собственных проектах. Шаговый двигатель легко подключать такие же ступенчатые и дискретные сигналы, что и дисковые накопители. Дополнительную информацию можно получить в главах, посвященных дисководам. Единственный отличие от системы дисковода в том, что электроника дисковода может буферизовать сигналы движения, так что контроллер сохраняет движение импульсов и выполняет движение после того, как контроллер получил последний импульс движения.
Контакты управления шаговым двигателем в интерфейсе ST506 / 412
Следующие сигналы от управляющего разъема необходимы для использования контроллер шагового двигателя в электронике жесткого диска. Важнейшие сигналы для шагового двигателя control – это сигналы “Направление” и “Шаг”. Сигналы направления работают так что низкий логический уровень перемещает головку чтения / записи внутрь (к центру диска) диска и высокого логического уровня двигает головой наружу. Шаговый сигнал – это активный сигнал с низким импульсом. Должен быть активирован сигнал выбора привода (низкий уровень), а ворота записи должен быть деактивирован (подняться на высоту), чтобы привод сигналы управления шаговым двигателем.Поиск завершен, Готов и Трек 0 предоставляют дополнительную информацию о статусе.
Контакт Функция Направление 6 Запись ворот на диск 8 Полный поиск с диска 10 Трек 0 с диска 22 Готов к поездке 24 Шаг за рулем 26 Диск выберите 1 для движения 28 Диск выберите 2 для движения 30 Диск выберите 3 для движения 32 Диск выберите 4 для движения 34 Направление движения 1-33 все нечетные контакты заземлены
Процедура управления шаговым двигателем жесткого диска через интерфейс ST506 / 412
Я использовал следующую процедуру для управления жестким диском приводные шаговые двигатели (взято из Руководства по проектированию DP8466):
1.Деактивировать линию WRITE GATE (контакт 6) 2. Активируйте строку DRIVE SELECT (контакты 26, 28, 30 или 32). 3. Дождитесь появления сигналов READY и SEEK COMPLETE. 4. Выберите направление с помощью сигнала НАПРАВЛЕНИЕ. (вывод 34) 5. Отправьте импульсы движения с помощью ШАГОВОЙ линии. (вывод 24)
Эксперименты с приводами головки звуковой катушки
Привод звуковой катушки управляет движение катушки к или от постоянный магнит в зависимости от количества ток, протекающий через него. Приводы звуковых катушек, используемые в системах с жесткими дисками имеют ускорение до текущей передаточной функции.
Арматура прикреплен к этой катушке и двигается взад и вперед по поверхность с ним. Сервоуправляемый привод звуковой катушки – очень точный метод, но тоже очень чувствительный. Любое изменение тока может заставить головной узел изменить положение и предопределенных позиций нет. По сути это аналоговая система, с точным количеством движение контролируется точным количеством применяется ток.
Фактическое положение катушки обычно определяется серво (или индексирующая) информация, которая записывается в привод от производителя.Точное расположение дорожки данных (из которые составляют от 6000 до 10000 на дюйм) зависит от “встроенного сервопривода” который представляет собой особый узор, записанный на диске во время изготовления. В В результате дорожка разделена на поля сервопривода, поля идентификатора и поля данных. Местоположение изменено на разные треки, читая и реагируя на них управляющие сигналы. Когда сервопривод информация считывается, генерируется сигнал ошибки положения (POS), который указывает, как далеко вы находитесь от центра трека. Сложная обратная связь система преобразует эту ошибку в ток в звуковой катушке, и голова движется назад к центру дорожки.
Из-за этой конструкции жесткий диск должен находиться в в довольно хорошем рабочем состоянии, так что головка звуковой катушки Механизм controllin будет работать. Позиционерам звуковой катушки всегда нужна обратная связь, и тщательно разработанные контурные фильтры. Если сортировка дисковода работ и знакомый вам интерфейс, то вы можете попробовать управление, как если бы вы управляли шаговым двигателем дисковода (легко с интерфейсом ST506 / 412).
Игра с поврежденным сервомеханизмом
Если жесткий диск настолько поврежден, что механизм управления больше не работает, то очень сложно точно контролировать сервопривод звуковой катушки больше.Но есть один эксперимент, который вы можете провести со звуковыми катушками.
Вы можете управлять звуковой катушкой с помощью обычного аудиоусилитель и источник музыки. Сначала найдите провода, идущие к звуковая катушка. Проверить сопротивление голоса. Если это 4 Ом или более, тогда вы можете попробовать управлять им напрямую, используя аудио усилитель. Замените динамик звуковой катушкой и начать играть музыку. Звуковая катушка будет двигаться вперед и назад и вы даже можете услышать какой-то звук из музыки. Будь осторожен с экспериментирование, потому что звуковая катушка может быть легко взорвана с чрезмерной мощностью, подаваемой на звуковую катушку.И помните также, что вы можете повредите ваш усилитель, если сделаете ошибки при подключении.
Вы можете попробовать преобразовать звуковую катушку для передачи тока в положение функция, добавив некоторый механизм, который пытается центрировать привод при отсутствии тока (можно попробовать пружины или небольшие кусочки мягкой резины).
Двигатели шпинделя
Большинство приводов имеют несколько пластин, разделенных дисковые проставки и закреплены на вращающемся шпинделе, который поворачивает тарелки в унисон.Прямой привод, бесщеточный постоянный ток мотор шпинделя встроен в шпиндель или смонтирован прямо под ним. Шпиндель и пластины вращаются с постоянной скорость, обычно 3600 об / мин, хотя в более новых моделях увеличил это до 4800, 5400 или 7200
Мотор шпинделя получает управляющие сигналы через система обратной связи с обратной связью, которая стабилизируется до постоянная скорость вращения. Сигналы управления поступают от информация, записанная на поверхность (а) во время производитель. В старых приводах использовался магнитный холл или катушечный тип. датчики для определения скорости вращения.
Двигатели жесткого диска обычно начинают вращаться, после чего подается питание. на жесткий диск. Сначала они разгоняют шпиндель до полной скорости. Если сервоуправление не может работать должным образом или что-то в этом роде другие идут не так, как надо на жестком диске они обычно перестают вращаться шпиндель.
Откуда я взял всю эту информацию
Я получил большую часть этой информации в этих документах из многочисленных некоторые статьи используют группы новостей alt.comp.hardware.homebuilt и наука. электроника.Я также использовал некоторые справочники, чтобы проверить некоторые факты и получить более подробную информацию. Идеи, как Мои идеи – использовать эти двигатели в своих проектах. я использовал части старых дисководов во многих моих проектах в области электроники (большинство были только несколько простых экспериментов).
Дополнительная информация
Если вы ищете готовый исходный код для шагового накопителя управления двигателем, неплохо было бы проверить работу Towanda L.Мэлоун. Эта бумага доступно по адресу http://www.eng.morgan.edu/~malone/dskdrv/dskdrv.html.
Список справочников
- Том Хоган, Справочник программиста для ПК, Microsoft Press, 1988
- DP8466 Disk Data Controller Design Guide / User’s Manual, National Semiconductor Corp, 1985
- Tandon 386 Краткое руководство для инженеров 5b
- РУКОВОДСТВО ДЛЯ ТЕХНИКА ПО ПОДСИСТЕМАМ ЖЕСТКИХ ДИСКОВ ПК Николаса Майорса
Томи Энгдал Прошивка
на диске и плате
Вы можете быть удивлены, узнав, чем жесткий диск – как отдельное устройство – похож на компьютер.Независимо от того, подключен ли накопитель к компьютеру через внешний блок или просто запитан от отдельного источника питания, первое, что он делает, – это запускает собственную внутреннюю программу, прошивку, которая действует так же, как операционная система компьютера. Это программное обеспечение для обслуживания дисков (или программа микрокода) должно загружаться само: мгновенно, без ошибок, сразу же привод включается при запуске компьютера.
Если микрокод без ошибок выполняет все служебные команды, а процесс запуска накопителя проходит все процедуры самопроверки и инициализации, то жесткий диск готов к чтению и записи данных и общению на универсальном цифровом языке с другие компоненты компьютера, операционная система и пользовательское программное обеспечение.
Технически диалог «компьютер-диск» всегда начинается с тестов BIOS, и как только диск обнаруживается в CMOS материнской платы, он принимается для постоянной работы.
Что произойдет, если внутренний процесс инициализации накопителя его микропрограммой по какой-либо причине завершится неудачно? Тогда CMOS не сможет определить неисправный жесткий диск. Компьютер пропустит такой диск и может выдать сообщение об ошибке.
Давайте поближе заглянем под кожух жесткого диска во время его инициализации при включении.На упрощенной схеме показаны основные компоненты накопителя, необходимые для его загрузки.
Схематическое изображение жесткого дискаЭлектронная плата, известная как PCB – Printed Circuit Board (рисунок вверху: зеленая часть), является жизненно важной частью жесткого диска. Вы можете рассматривать его как материнскую плату с жестким диском, со своим процессором и оперативной памятью. PCB – это не только набор микросхем на плате, но и небольшая (но очень важная) часть прошивки жесткого диска, записанная во встроенных микросхемах и основном процессоре PCB.
Другая большая часть прошивки находится прямо на пластинах внутри привода на специальных служебных дорожках (рис. Коричневый кружок). Каждый диск внутри привода покрыт магнитными слоями с высокой плотностью данных с каждой стороны диска; на шпиндель уложены один или несколько дисков.
Большая часть диска занята секторами LBA (Logical Block Addressing), доступными для компьютерных программ, операционной системы и пользовательских данных.
Очень маленькая часть диска (рис.коричневая зона) используется для служебных нужд, известных как служебная зона. Именно там находится остальное внутреннее программное обеспечение, предназначенное только для нормальной и безупречной работы накопителя. Это внутреннее программное обеспечение или аппаратный микрокод относится к прошивке жесткого диска, информации SMART, модулю транслятора (хранит записи о дефектных секторах или целых дефектных дорожках, помогает поддерживать порядок в системе адресации физических секторов к логическому LBA), параметры настройки головок и многое другое.
Когда жесткий диск включен, небольшая часть микропрограммы на печатной плате запускает весь процесс загрузки диска. Он отправляет команду на включение двигателя, перемещение головок по вращающейся поверхности, чтобы поймать синхронизирующие метки для стабилизации скорости.
Затем микрокод сервисной зоны начинает загружаться в память накопителя.
Этот фрагмент кода, загруженного с диска, должен совпадать с кодом прошивки на печатной плате. В противном случае нарушается целостность всей программной системы накопителя.
Если что-то пойдет не так с загрузкой всего микрокода (на плате или на части диска), привод не запустится нормально. Жесткий диск может остановить свой двигатель, или начать щелкать, или просто зависнуть, то есть перестать реагировать на любые команды извне.
Обычно печатная плата – самая надежная часть жесткого диска. Больше всего проблем возникает из-за поврежденных механических частей, особенно из сверхчувствительных головок. Самым опасным состоянием поврежденного жесткого диска для его данных является повреждение магнитных слоев вращающихся пластин диска – поскольку он содержит данные.
Для некоторых моделей жестких дисков требуется уникальная прошивка, записанная на оригинальную печатную плату, поэтому мы требуем, чтобы поврежденный жесткий диск был представлен в одном оригинальном (детали, этикетки и т. Д.) Для процесса восстановления данных. Как бы плохо это ни выглядело для вас визуально, сгоревшая печатная плата не должна заменяться какой-либо другой с других жестких дисков, процедуры восстановления требуют только оригинальной печатной платы! Об остальном позаботимся мы.
Совет профессионалов
НЕ вращающиеся жесткие диски не могут вызвать дальнейшее повреждение слоев данных.Такие механические устройства с кирпичными стенами защитят данные от царапин во время негарантированных включений питания и опасного завершения тестирования, а также дадут нам больше шансов сохранить больше файлов.
Неисправный привод, который может вращать двигатель, может испортить сами данные. Чем раньше пользователь поймет, что что-то не так, и выключит компьютер или другое оборудование с диском данных, тем лучше для безопасности данных.
Не включайте жесткий диск снова при первых признаках неисправности.Кроме того, мы советуем вам не позволять никому прикасаться, включать питание, диагностировать или тестировать проблемный диск.
