
Общеизвестно, что регулировать количество оборотов электродвигателя можно периодическим включением и отключением его от энергосети, кроме того при изменении времени включения и отключения можно задавать дополнительные параметры скорости. Это явление характерно не только для электродвигателя – его действие можно заметить во всех потребителях тока, способных запасать энергию, иначе говоря, инерционных системах.
Скважность
Принцип широтно-импульсной модуляции основан именно на этом эффекте, он нашёл себе достаточно широкое применение при управлении электротехническими устройствами и источниками освещения, где требуется циклическая подача энергии. В английском языке этот принцип получил название – Pulse-Width Modulation.
Что такое ШИМ
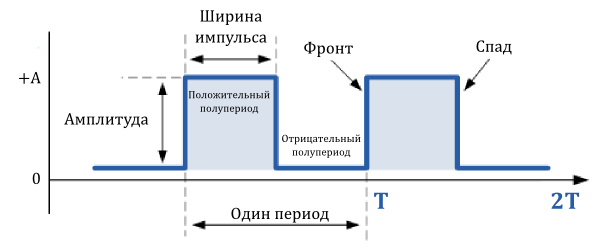
Что такое электрический импульс? Это резкий конечный всплеск напряжения в системе. Поскольку он конечен, то он имеет начало, обычно называемое фронтом, ширину и спад, его окончание, период.
Такие всплески можно охарактеризовать следующими параметрами:
- периодичность – это временной период до фронта следующего импульса, обозначается литерой T;
- скважность – отношение периода к ширине, это величина безразмерная и выражается чаще всего в процентах, на схеме можно обозначить участок между спадом первого импульса и фронтом нового, обозначается литерой S;
- частота сигнала – количество всплесков за определённый промежуток времени, величина, обратная периоду колебаний;
- ширина импульса – период времени, в течение которого его амплитуда стабильна;
- коэффициент заполнения – значение, обратное скважности, обычно обозначается в формулах литерой t.
Таким образом, скважность импульса – это соотношение:
S = T/t.
Благодаря этому, широтно-импульсная модуляция позволяет управляемо изменять напряжение в системе от нулевого значения до максимальной амплитуды сигнала, это используется для установки оптимальных режимов работы инерциальных систем.
Схема
Применение
Для формирования прямоугольных колебаний применяется микросхема аналогового типа или чип-контроллер. Сами колебания управляют только нагрузкой, идущей от источника тока. Подключение производится через ключевую схему на полупроводнике. Ключ имеет всего два состояния: либо он включён в сеть, либо размыкает её.
Грубо говоря, все зависит от характеристик колебаний. Так, если светильник подключен через подобную схему, то при низкой частоте работы устройства лампа будет мигать с определенной периодичностью, но при превышении её сверх 50Гц в человеческих глазах отдельные всплески света сольются в одно ровное свечение. Это особенность человеческого глаза, который не улавливает колебания свыше этого значения. Но и яркость свечения можно регулировать. Чем ниже коэффициент заполнения, а, следовательно, и значение, обратное ему, тем меньше яркость свечения источника.
Аналогичный пример можно использовать и с двигателем постоянного тока, под управлением широтно-импульсного регулятора. При этом низкая частота приведёт к снижению оборотов двигателя, в то время как высокая – к его эффективной работе. Для её достижения используются ключи-полупроводники, обладающие значительным быстродействием и низким коэффициентом проводимости, так как в противном случае возможно запаздывание сигнала.
При необходимости сигналы схемы импульсного регулятора можно усреднять, для этого используются фильтры низких частот, но при подключении двигателя с большой механической инерцией и хорошим значением индуктивности. В этом случае снижение амплитуды и частоты происходит самопроизвольно.
Скважность, а также её обратное значение зависят от уровня моделирующего сигнала, частота таких устройств определяется частотой дублирующего генератора, подающего дополнительный сигнал.
Генератор для получения скважности
Видео
Оцените статью:Электрические сигналы, которые имеют только 2 допустимых состояния «0» или «1», что соответствует уровню напряжения 0.2 вольта (В) или 4.9В, называются импульсными. В основном, оперируют с последовательностью импульсов. Одна из простейших последовательностей импульсов показа на рис. ниже.
Последовательность импульсов
Общая информация
К основным параметрам последовательности импульсов относятся:
- l амплитуда импульса – Um,
- l длительность импульса – tu,
- l длительность паузы – tn,
- l период следования T или частота f = 1/T следования.
Если длительность tu всех импульсов, входящих в состав последовательности, и всех пауз tn постоянна в течение времени, то она называется периодической.
Важным параметром периодического импульсного процесса является скважность импульсов S. Скважность импульсов – это отношение периода следования к длительности импульса, рассчитывается по формуле:

Эффективность S при управлении устройства достигается при стабильной частоте сигнала. Иногда используют обратную величину D – коэффициент заполнения, рассчитывается по формуле:

При равенстве tu и tn скважность равна 2, и сигнал называется меандром. S и D – безразмерные величины, так как время делится на время. В цифровых устройствах применяются импульсы различной формы. Формой импульса называется графическое изображение закона изменения импульсного напряжения во времени. На рис. ниже показаны формы сигналов:
- а – прямоугольная,
- б – трапецеидальная,
- в – экспоненциальная,
- г – колокольная,
- д – ступенчатая,
- е – пилообразная.
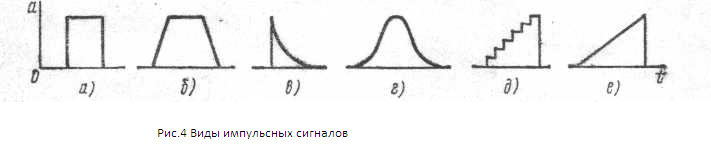
Виды импульсных сигналов
Техническая характеристика формы импульсов связана с количественной оценкой основных параметров импульса, свойств отдельных его участков, которые играют разную роль при воздействии импульса на устройство. На рис. выше изображены идеализированные формы импульса. Из-за переходных процессов в устройствах (формирования и усиления импульсов) существует реальная форма, например, прямоугольного импульса (рис. ниже).
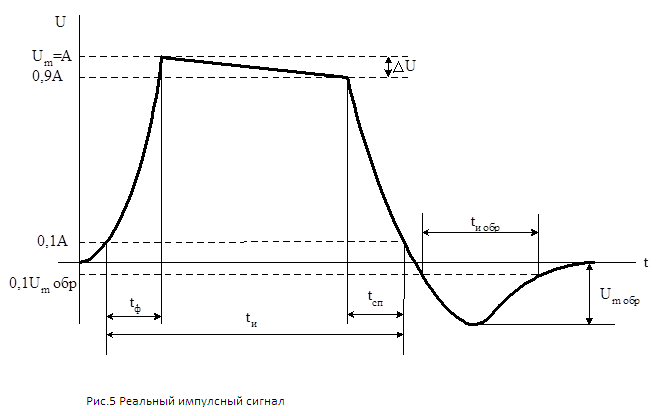
Реальная форма импульса
Основные параметры импульса – это:
- l Размах импульса – Um,
- l Длительность импульса – tи,
- l Длительность переднего фронта – tф,
- l Длительность заднего фронта – tсп,
- l Спад вершины – ΔU,
- l Размах выброса заднего фронта – Um обр,
- l Длительность выброса заднего фронта – tи обр.
Указанные величины считываются между уровнями 0.1 и 0.9 от амплитуды в микросекундах, в зависимости от частоты сигнала. Амплитудные – в вольтах.
Определить параметры импульсного сигнала можно с помощью осциллографа, частотомера или мультиметра.
Управление скважностью
С помощью цифровых сигналов происходит управление разнообразными устройствами. Первое применение такого управления использовалось при передаче информации кодом Морзе. Сигнал передаётся короткими и длинными импульсами. Каждой букве соответствует определённый набор точек и тире. Сегодня этот метод управления используется для ШИМ-управления.
При изменении D (коэффициент заполнения) от 0 до 1 добиваются нужного напряжения на выходе электронного устройства. Таким образом, можно управлять оборотами двигателя, освещением, яркостью дисплея и т.д. При формировании прямоугольных импульсов используются специально разработанные микросхемы, например, NE555, NL494, КР1006ВИ1, IR2153, и микроконтроллеры: Arduino, AVR, SG2525A.
Для обеспечения надёжной работы управляемых устройств к параметрам импульсного сигнала предъявляются жестокие требования по их стабильности. Это достигается применением кварцевого генератора и хорошей переходной характеристикой схемы формирования управляющих импульсов.
Видео
Множество приборов работает с импульсными сигналами. Создаются они с помощью специальных схем-генераторов. Наиболее важная их характеристика – скважность.
Чем отличается скважность и коэффициент заполнения импульсов
Одной из наиболее важных величин в импульсной электронике – это скважность, обозначаемая латинской буквой S. Она дает характеристику импульсам прямоугольной формы и показывает, как относится их период T ко времени t1. К примеру, коэффициент меандра равен 2, поскольку время t1 в этой последовательности составляет половину периода: S = T / t1 = 2.
 Генератор скважности
Генератор скважностиМеандр представляет собой поток импульсов, в котором отрицательные и положительные части имеют одинаковую продолжительность.
Инверсия скважности имеет название коэффициент заполнения. Следовательно, скважность способна принимать множество значений от бесконечности до единицы, а рабочий цикл этого же потока импульсов, как еще могут называть коэффициент заполнения, способен принимать значения от 0 до 1. Часто удобней записывать не данный коэффициент, измерение которого производится десятичными дробями, а скважность, которая равна, чаще всего, целому числу.
Например: D = 0,5 или S = 2 – эти две записи означают одно и то же, но вторую читать легче. Рабочий цикл S = 10 соответствует показателю D = 0,1 – это означает, что длительность импульса в 10 раз меньше его периода.
При изучении данного явления просматривается этимологическая связь с словом «скважина» из русского языка: широкая скважина (на самом деле, это промежуток между импульсами в потоке) – положительные части узкие, узкая скважина – положительные части широкие (но свободное пространство между ними мало).
Важно: У англоязычных авторов термин «скважность» не встречается вовсе, а для его замены применяют понятие «рабочий цикл» – аналогичный российскому коэффициенту заполнения (D). Однако в английской литературе он выражается не дробным числом, а процентом. Например, если D = 0,5 в западных пособиях будет указано: D = 50%.
Характеристики скважности
Коэффициент заполнения и показатель скважности зависят от уровня получаемого колебания, при этом его частота определяется параметрами генератора. Для вычисления скважности имеют наибольшее значение два основных критерия:
- Период Т.
- Длительность импульса t1.
 Характеристики
ХарактеристикиПринцип действия
Для формирования прямоугольного колебания в устройствах-модуляторах имеется специальная микросхема-контроллер либо аналоговая микросхема. Подключение происходит посредством цепи на полупроводнике. Полупроводник имеет только два состояния:
- Закрытое
- Открытое.
Важно! Работа всей цепи зависит от характера колебаний. Следовательно, если лампа подключена через полупроводниковый прибор, она начнёт мерцать с заданной частотой.
Однако, когда частота превышает 50 Гц, из-за особенностей глаз человека, мигание сливается в единое свечение. Но таким образом можно регулировать и яркость свечения. Снижение коэффициента повлечет за собой уменьшение яркости света, выдаваемой лампой.
Подобную схему можно использовать для постоянных двигателей. Уменьшение частоты провоцирует снижение скорости вращения двигателя, а высокие – к большей мощности агрегата.
В аналогичных устройствах применяется полупроводниковый переключатель, который имеет высокую скорость срабатывания и низкую проводимость, поскольку в противном случае устройство может запаздывать.
Как обозначается
Скважность обозначается английской буквой S, величина, обратная ей – коэффициент заполнения – буквой D. Данные обозначения используются и в русской, и в англоязычной литературе.
Формы сигналов
Сигналы различаются по форме и характеристикам:
- Синусоида. Переменный ток на выходе из дома представляет собой синусоидальную волну, которая изменяется во времени с частотой 50 Гц. Для синусоидального колебания период можно выражать не в секундах, а в градусах или в радианах. При этом, необходимо учитывать, что полный период равен 360 ° (при использовании градусной меры) или 2п (если применяется радианная мера)
Важно! Период и частота математически зависят друг от друга. По мере того, как период уменьшается, частота увеличивается, и наоборот.
 Синусоид
Синусоид- Поскольку меандры имеют симметричные прямоугольные волны, периоды T и t1 которых равны, они широко используются в электронных цепях часов и сигналов синхронизации. На входе и выходе практически всех цифровых логических схем используются такие сигналы. Поскольку они симметричны, длительность положительной части равняется временному промежутку, когда импульс отрицательный (ноль). У сигналов, используемых в качестве тактовых сигналов в цифровой технике, длительность положительного импульса называется временем заполнения цикла.
 Меандр
Меандр- Разница между прямоугольным сигналом и меандром заключается в том, что длительности положительной и отрицательной частей периода не равны друг другу. Поэтому прямоугольные сигналы классифицируются как несбалансированные.
 Прямоугольный сигнал
Прямоугольный сигналВажно! Сигнал может принимать и положительные, и отрицательные значения, подвергаясь изменениям. В показанном потоке время положительного импульса больше, чем длительность отрицательного импульса, хотя бывает и наоборот.
Как измерить скважность с помощью формулы
Скважность прямоугольных импульсов S – это отношение периода T ко времени импульса, обозначаемого буквой t1. Также, стоит отметить, что рабочий цикл D – это значение обратное скважности:
 Скважность формула
Скважность формулаСкважность сигнала – одна из самых важных характеристик в импульсной технике. Ее основные характеристики – это период и время численного значения импульса. Изменяя эти характеристики, можно повлиять на всю цепь.
Импульсный способ регулирования скорости исполнительных двигателей постоянного тока
 Широтно-импульсный способ управления. Наиболее широкое применение из всех видов импульсного регулирования для управления двигателями постоянного тока нашло широтно-импульсное регулирование напряжения (ШИР).
Широтно-импульсный способ управления. Наиболее широкое применение из всех видов импульсного регулирования для управления двигателями постоянного тока нашло широтно-импульсное регулирование напряжения (ШИР).
Рис.2.13
При импульсном способе (рис 2.13) к микродвигателю подводятся импульсы неизменного по амплитуде напряжения управления Uу.ном,в результате чего его работа состоит из чередующихся периодов разгона и торможения. Если эти периоды малы по сравнению с полным временем разгона и остановки ротора, то угловая скорость ротора не успевает к концу каждого периода достигать установившихся значений и установится некоторая средняя угловая скорость ωcp. Значение ωcp при неизменных моменте нагрузки и напряжении возбуждения однозначно определяется относительной продолжительностью импульсов ε:
ε=tи/Tи, (2.22)
где tи– длительность импульса; Ти – период.
С увеличением относительной продолжительности импульсов (рис.2.13, ε‘>ε) угловая скорость ротора растет ( ω’cp> ωcp).В период паузы tп ротор обязательно должен тормозиться. Если это условие не будет выполняться, то угловая скорость ротора при любом значении ? будет непрерывно увеличиваться, пока не достигнет значения угловой скорости х.х., так как во время импульса угловая скорость будет возрастать, а во время паузы – оставаться практически неизменной.
С ростом частоты управляющих импульсов амплитуда колебаний скорости уменьшается; среднее значение угловой скорости остается при этом неизменным.
Принципиальные схемы импульсного регулирования показаны на рис. 2.14.
Рис.2.14
Если к валу двигателя приложен статический момент нагрузки, приводящий к механическому торможению двигателя во время паузы, то возможно применение схемы (рис.2.14,а), в которой ключ К в течение одной части цикла подключает якорь непосредственно к источнику питания, создавая положительный момент (разгон), в течение же другой части – отключает якорь от источника питания (торможение). Если двигатель работает без или с малой статической нагрузкой, то возможно применение электрического торможения (динамического или противовключением) во время паузы. Например, в схеме на рис. 2.14,б ключ К переключает во время паузы якорь на сопротивление Rд для осуществления динамического торможения. В качестве ключевых элементов в современных схемах используются транзисторы или тиристоры; контактные электромагнитные реле, ввиду их низкого быстродействия, практически не применяются.
Рассмотрим механические и регулировочные характеристики исполнительного двигателя постоянного тока при импульсном управлении с торможением за счет статического момента сопротивления Mст на валу (рис.2.14,а). Под механической характеристикой при импульсном управлении понимают зависимость средней угловой скорости от среднего значения момента при неизменной относительной продолжительности импульсов ε. Под регулировочной характеристикой понимают зависимость средней угловой скорости ротора от относительной продолжительности импульсов ε при неизменном среднем моменте на валу двигателя.
В зависимости от параметров двигателя схемы управления и момента нагрузки возможны два основных режима работы двигателя: режим прерывистого тока и режим непрерывного тока.
Режим прерывистого тока характеризуется тем, что ток якоря течет во время импульса, а в течение основного времени паузы tп равен нулю. Этот режим может возникнуть в схеме рис. 2.14,а при τя <Tи (τя-электромагнитная постоянная времени обмотки якоря). Уравнение механических и регулировочных характеристик в относительных единицах имеет вид
ωcp*=1 – Mcp*/ε , (2.23)
Механические характеристики – линейные и начинаются из одной общей точки х.х.; жесткость механических характеристик уменьшается при уменьшении ε. Регулировочные характеристики – нелинейные; регулирование возможно только при Mcp*!!=0.
Режим непрерывного тока характеризуется тем, что во время паузы tп уменьшающийся ток якоря iяпродолжает протекать по якорю в том же направлении, что и во время tи.
Этот режим может возникнуть, например, при регулировании по схеме рис. 2.14,а при Tи <<τя.При отключении ключа К (пауза tп) ток якоря начинает уменьшаться. Возникает ЭДС самоиндукции якоря, стремящаяся поддержать в цепи ток прежнего направления. Направление ЭДС самоиндукции такое, что диод Д оказывается открытым и через него замыкается цепь для тока якоря iя.
При малой амплитуде колебаний мгновенной угловой скорости ток якоря iя и момент Mэм меняются незначительно, и уравнение механических и регулировочных характеристик в относительных единицах имеет вид, аналогичный (2.7):
ωcp*=ε – Mcp* , (2.24)
Механические и регулировочные характеристики будут иметь такой же вид, как и при непрерывном якорном способе управления (см.рис. 2.7) с заменой α на ε. Как видно, закон регулирования угловой скорости в режиме непрерывного тока получается линейным.
В реальных схемах импульсного управления режим работы двигателя в одном диапазоне моментов и угловых скоростей ближе к режиму непрерывного тока, в другом – к режиму прерывистого тока.
Механические и регулировочные характеристики для этого случая представлены на рис. 2.15. Граница перехода из одного режима в другой показана пунктирной линией (механические характеристики,рис.2.15,а). С целью обеспечения линейности регулировочных характеристик (рис.2.15,б) диапазон прерывистых токов стремятся сузить.
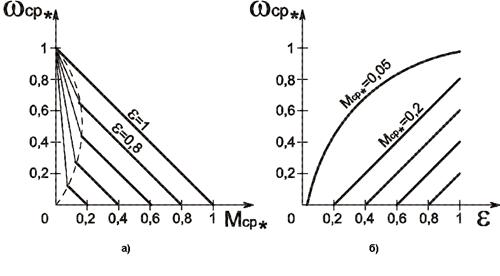
Рис.2.15
Основные преимущества импульсного способа управления – меньшее значение средней потребляемой двигателем мощности; возможность управления при нерегулируемом источнике постоянного тока, например, бортовой аккумуляторной батарее. Однако аппаратура управления в общем случае более сложная, чем при непрерывном управлении.
 Система «Широтно-импульсный преобразователь – двигатель» (ШИП-Д)
Система «Широтно-импульсный преобразователь – двигатель» (ШИП-Д)
Рис.2.16
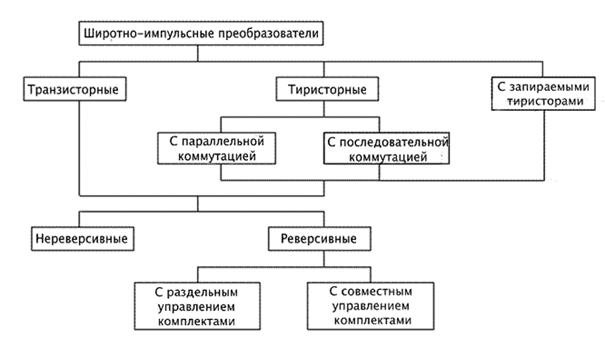
На рис.2.16 приведена классификация основных типов широтно-импульсных преобразователей. Широтно-импульсные преобразователи состоят из силовой части, выполняемой на транзисторах, тиристорах или запираемых тиристорах, и схемы управления; питаются они от сети постоянного тока.
На первых этапах применения полупроводниковых ШИП выбор транзисторной или тиристорной элементной базы основывался на следующих соображениях. Транзисторные ШИП имеют относительно малую мощность, невысокую перегрузочную способность по току (2-2,5 Iном), но позволяют реализовать частоту импульсов до 5 кГц. Тиристорные ШИП более мощные и лучше выдерживают перегрузки по току и напряжению, но позволяют работать с импульсами частотой не более 1 кГц и требуют более сложной схемы управления.
Однако в настоящее время подход к выбору силовой элементной базы ШИП несколько меняется, что объясняется двумя основными факторами. С одной стороны, созданы силовые модули на основебиполярных транзисторов с изолированным затвором, по мощности и перегрузочной способности практически не уступающие тиристорным и работающие на частотах до 10кГц. С другой стороны, в настоящее время все более широко выпускаются достаточно мощные запираемые тиристоры , которые в отличие от обычных тиристоров можно и закрыть подачей соответствующего потенциала на управляющий электрод.
Принцип работы транзисторного ШИП основан на использовании транзисторов в ключевом режиме: транзистор пропускает ток при подаче управляющего сигнала и перестает его пропускать после снятия сигнала.
Транзисторные ШИП в первом приближении можно считать идеальными звеньями с бесконечно малой инерционностью и бесконечно малым внутренним сопротивлением и для анализа систем ШИП-Д пользоваться выражениями механической характеритики и передаточной функции, полученной непосредственно для двигателя.
Принцип работы ШИП на запираемых тиристорах не имеет существенных отличий от работы транзисторного ШИП.
Принцип работы ШИП с обычными тиристорами в отличие оттранзисторных имеет две основные особенности. Во-первых, в состав тиристорного ШИП входит схема искусственной коммутации, которая должна при питании тиристора от сети постоянного тока в требуемый момент времени изменить полярность на аноде и катоде и запереть тиристор. Связано это с тем, что тиристор после отпирания теряет управляемость и запереть его подачей сигнала на управляющий электрод невозможно. Во-вторых, запирание тиристора требует определенного времени, что не позволяет реализовать относительную продолжительность импульсов ε , достаточно близкую к нулю.
Системы с тиристорными ШИП.В схемах искусственной коммутации, которые подразделяются на схемы параллельного и поледовательного типов, для запирания тиристоров обычно используется заряд, накапливаемый конденсатором.
В схемах с параллельной коммутацией, один из вариантов которых показан на рис. 2.17,а, конденсатор С подключен непосредственно к основному тиристору Т1, который отпирается импульсами управления Uи1, следующими с требуемым периодом Ти. Конденсатор С заряжается через добавочное сопротивление Rg и открытый тиристор Т1 до напряжения Uc ≠ U .Для запирания тиристора Т1 – завершения подачи силового импульса на якорь двигателя Я, в момент времени tи подается управляющий импульс Uик на управляющий электрод вспомогательного тиристора Тк.

Рис.2.17
Тиристор Тк отпирается, конденсатор С начинает разряжаться и напряжение Uc, приложенное к тиристору Т1 в запирающем для него направлении, запирает тиристор Т1. При спаде разрядного тока до значения, меньшего удерживающего тока тиристора, запирается и тиристор Тк.
В схемах с последовательной коммутацией, один из вариантов которых показан на рис. 2.17,б, последовательно с якорем двигателя и основным тиристором Т1 включен дроссель L. Коммутирующая цепь, состоящая из конденсатора С, дополнительного дросселя Lк и диода Дк, подключается к источнику постоянного тока с напряжением Uк !!<= U. Наличие в схеме колебательных контуров LC и LкС обеспечивает заряд конденсатора С до напряжения Uc>Uк.
При подаче управляющего импульса на вспомогательный тиристор Тк он открывается и возникает колебательный контур LC, в котором начинает протекать ток разряда конденсатора. В дросселе L возникает ЭДС самоиндукции, значение которой в первый момент времени равно Uc, а направление – противоположно току. Потенциал анода тиристора Т1 становится ниже потенциала катода, и тиристор запирается. Затем в результате колебательных процессов, происходящих в колебательных контурах LC и DкLкC, запирается тиристор Тк и заряжается конденсатор С.
Сравнение схем с параллельной и последовательной коммутацией показывает, что в схемах с последовательной коммутацией время запирания силовых тиристоров меньше за счет наличия колебательного контура. Однако наличие дросселя L в силовой цепи приводит, естественно, к росту постоянных времени системы ШИП-Д. Важным преимуществом схем с последовательной коммутацией является то, что заряд конденсатора происходит во время паузы в силовой цепи. Следовательно, длительность силового импульса tи можно снижать до значений, близких к нулю, не опасаясь того, что конденсатор не успеет зарядиться до требуемого напряжения. Это позволяет существенно расширить диапазон регулирования в область малых скоростей, вплоть до нуля. Выбор конкретной схемы зависит от требований к системе ШИП-Д.
Рассмотренные выше схемы ШИП были нереверсивными, реверсивные ШИП имеют двойной комплект ключевых элементов, включенных наиболее часто по мостовой схеме.
Особенности статических и динамических характеристик. Уравнение механических характеристик системы может быть получено на основе уравнений механических характеристик двигателя (2.4.) с учетом внутреннего сопротивления преобразователя Rшип.экв. Например, в режиме непрерывного тока уравнение будет иметь вид
 (2.25)
(2.25)
Передаточная функция системы ШИП-Д может быть получена на основе теории непрерывных систем автоматического управления, поскольку частота коммутации тиристоров обычно настолько велика, что пульсацией угловой скорости двигателя при анализе динамических процессов можно пренебречь.
Тиристорный ШИП можно рассматривать как усилительное звено с запаздыванием τзап , вносимым схемой управления ШИП. Тогда передаточная функция ШИП
 , (2.26)
, (2.26)
где Кшип – коэффициент передачи ШИП, равный отношению приращений среднего напряжения на якоре Uя.ср и напряжения управления Uу на входе схемы управления ШИП.
Постоянные времени двигателя τ’м и τ’я должны учитывать эквивалентное активное сопротивление Rшип.экв и индуктивность L шип.экв преобразователя, т.е. характеризуют динамические свойства двигателя в системе:
 (2.27).
(2.27).
В целом ряде практических случаев значением Rшип.экв можно пренебречь, а в L шип.экв учитывать только индуктивность дросселя L при последовательной коммутации.
Следует отметить, что в реальных схемах время запаздывания обычно невелико и в первом приближении им можно пренебречь. По сравнению с системой УВ-Д система ШИП-Д отличается более высоким быстродействием при широком диапазоне регулирования скорости.
Схемы управления ШИП. Схема управления ШИП вырабатывает и распределяет во времени последовательности импульсов для управления отпиранием и запиранием силовых тиристоров и транзисторов. Эта схема, позволяющая получить силовые импульсы требуемой длительности в зависимости от уровня напряжения управления при постоянном периоде следования импульсов, получила название широтно-импульсного модулятора (ШИМ). Работа ШИМ обычно основана либо на принципе сложения двух систем разнополярных импульсов прямоугольной формы с регулируемым фазовым сдвигом между системами импульсов, либо на сравнении периодически меняющегося, наиболее часто пилообразного опорного напряжения с сигналом управления. Последний принцип получил широкое распространение при управлении тиристорным ШИП.
Принцип действия ШИМ
Принцип действия ШИМ, как указывает на это само название, заключается в изменении ширины импульса сигнала. При использовании метода широтно-импульсной модуляции, частота сигнала и амплитуда остаются постоянными. Самым важным параметром сигнала ШИМ является коэффициент заполнения, который можно определить по следующей формуле: 
Также можно отметить, что сумма времени высокого и низкого сигнала определяет период сигнала:
где:
· Ton — время высокого уровня
· Toff — время низкого уровня
· T — период сигнала
Время высокого уровня и время низкого уровня сигнала показано на нижнем рисунке. Напряжение U1- это состояния высокого уровня сигнала, то есть его амплитуда.
На следующем рисунке представлен пример сигнала ШИМ с определенным временным интервалом высокого и низкого уровня.
Расчет коэффициента заполнения ШИМ
Расчет коэффициента заполнения ШИМ на примере:
Для расчета процентного коэффициента заполнения необходимо выполнить аналогичные вычисления, а результат умножить на 100%:

Как следует из расчета, на данном примере, сигнал (высокого уровня) характеризуется заполнением, равным 0,357 или иначе 37,5%. Коэффициент заполнения является абстрактным значением.
Важной характеристикой широтно-импульсной модуляция может быть также частота сигнала, которая рассчитывается по формуле:
Значение T, в нашем примере, следует взять уже в секундах для того, чтобы совпали единицы в формуле. Поскольку, формула частоты имеет вид 1/сек, поэтому 800ms переведем в 0,8 сек.
Благодаря возможности регулировки ширины импульса можно изменять, например, среднее значение напряжения. На рисунке ниже показаны различные коэффициенты заполнения при сохранении той же частоты сигналов и одной и той же амплитуды.
Для вычисления среднего значения напряжения ШИМ необходимо знать коэффициент заполнения, поскольку среднее значение напряжения является произведением коэффициента заполнения и амплитуды напряжения сигнала.
Для примера, коэффициент заполнения был равен 37,5% (0,357) и амплитуда напряжения U1 = 12В даст среднее напряжение Uср:
В этом случае среднее напряжение сигнала ШИМ составляет 4,5 В.
ШИМ дает очень простую возможность понижать напряжение в диапазоне от напряжения питания U1 и до 0. Это можно использовать, например, для регулировки яркости свечения светодиодов, или скорости вращения двигателя DC (постоянного тока), питающиеся от величины среднего напряжения.
Сигнал ШИМ может быть сформирован микроконтроллером или аналоговой схемой. Сигнал от таких схем характеризуется низким напряжением и очень малым выходным током. В случае необходимости регулирования мощных нагрузок, следует использовать систему управления, например, с помощью транзистора.
Это может быть биполярный или полевой транзистор. На следующих примерах будет использован биполярный транзистор BC547.
Пример управления светодиодом при помощи ШИМ.
Сигнал ШИМ поступает на базу транзистора VT1 через резистор R1, иначе говоря, транзистор VT1 с изменением сигнала то включается, то выключается. Это подобно ситуации, при которой транзистор можно заменить обычным выключателем, как показано ниже:
Упрощенная схема управления светодиодом.
Когда переключатель замкнут, светодиод питается через резистор R2 (ограничивающий ток) напряжением 12В. А когда переключатель разомкнут, цепь прерывается, и светодиод гаснет. Такие переключения с малой частотой в результате дадут мигающий светодиод.
Однако, если необходимо управлять интенсивностью свечения светодиодов необходимо увеличить частоту сигнала ШИМ, так, чтобы обмануть человеческий глаз. Теоретически переключения с частотой 50 Гц уже не незаметны для человеческого глаза, что в результате дает эффект уменьшения яркости свечения светодиода.
Чем меньше коэффициент заполнения, тем слабее будет светиться светодиод, поскольку во время одного периода светодиод будет гореть меньшее время.
Такой же принцип и подобную схему можно использовать и для управления двигателем постоянного тока. В случае двигателя необходимо, однако, применять более высокую частоту переключений (выше 15-20 кГц) по двум причинам.
Первая из них касается звука, какой может издавать двигатель (неприятный писк). Частота 15-20 кГц является теоретической границей слышимости человеческого уха, поэтому частоты выше этой границы будут неслышны.
Второй вопрос касается стабильности работы двигателя. При управлении двигателем низкочастотным сигналом с малым коэффициентом заполнения, обороты двигателя будут нестабильны или может привести к его полной остановке. Поэтому, чем выше частота сигнала ШИМ, тем выше стабильность среднего выходного напряжения. Также меньше пульсаций напряжения.
Не следует, однако, слишком завышать частоту сигнала ШИМ, так как при больших частотах транзистор может не успеть полностью открыться или закрыться, и схема управления будет работать не правильно. Особенно это относится к полевым транзисторам, где время перезарядки может быть относительно большое, в зависимости от конструкции.
Слишком высокая частота сигнала ШИМ также вызывает увеличение потерь на транзисторе, поскольку каждое переключение вызывает потери энергии. Управляя большими токами на высоких частотах необходимо подобрать быстродействующий транзистор с низким сопротивлением проводимости.
Управляя двигателем постоянного тока с помощью ШИМ, следует помнить о применении диода для защиты транзистор VТ1 от индукционных всплесков, появляющимся в момент выключения транзистора. Благодаря использованию диода, индукционный импульс разряжается через него и внутреннее сопротивление двигателя, защищая тем самым транзистор.
Схема системы управления скоростью вращения двигателя постоянного тока с защитным диодом.
Для сглаживания всплесков питания между клеммы двигателя, можно подключить к ним параллельно конденсатор небольшой емкости (100nF), который будет стабилизировать напряжение между последовательными переключениями транзистора. Это также снизит помехи, создаваемые частыми переключениями транзистора VT1.
РадиоКот :: Расчёт импульсных трансформаторов
РадиоКот >Чердак >Расчёт импульсных трансформаторов
Хочу рассказать о расчёте импульсных трансформаторов т.к. в сети очень много методик, но все они какие – то отдалённые и примерные с какими то непонятными коэффициентами, числами, откуда они взялись никто не описывает а приводит конечный результат в итоге результат получается с большим отклонением!!
Начнём с того, что мы захотели разработать некое устройство, посчитали необходимую требуемую мощность на выходе, допустим она равна 250 Вт, далее необходимо выбрать магнитопровод обеспечивающий заданую мощность.
Для этого существует реальная формула для оценки входной габаритной мощности магнитного элемента:
- кф – коэффициент формы напряжения или тока: для синуса =1,11 для прямоугольника =1.
- Кзс – коэффициент заполнения геометрического сечения магнитопровода материалом феромагнетика Кзс = 0,6 – 0,95 и даётся в справочной литературе на магнитный элемент.
- Кок – коэффициент заполнения окна магнитопровода сечениями проводников, Кок =0,35.
- n0 – коэффициент показывающий какую часть катушки занимает первичная обмотка, для трансформаторов n0 = 0,5.
- Sc – сечение магнитопровода.
- Sок – сечение окна магнитопровода.
- J – плотность тока, при естественном охлаждении 3500000 А/м2, при принудительном 6000000 А/м2
- В – рабочая индукция магнитопровода.
- F – частота напряжения либо тока Гц.
И так по этой формуле мы оценим реальную габаритную мощность трансформатора и прикиним что можем выжать с этого сердечника!
Например:
Имеем трансформатор от компьютерного блока питания с параметрами.
Сечение магнитопровода Sс = 0,9 см2
Сечение окна Sок = 2,4 см2
Рабочая индукция В = 0,15 (ориентировочное значение)
Частота предпологаемой работы нашего устройства f = 50кГц.
Все величины в единицах СИ!!!!!!!!! Т.е. переводим всё в метры, амперы, герцы, и.т.д.
Получим:
Так сердечник оценили, идём дальше, теперь необходимо разобраться с витками и сечением провода.
Начнём с витков в первичной обмотки, для этого существует замечательная формула:
Все данные мы рассмотрели выше, кроме U1– это непосредственно напряжение на первичной обмотке.
Допустим строим полумостовой преобразователь, Еп = 24В, следовательно U1 = 12В т.к первичная обмотка будет подключена через ёмкостной делитель т.е 24/2.
Далее считаем.
Вторичная обмотка допустим имеет напряжение 50В.
Все значения округляем до целого числа!
Теперь посчитаем сечение проводников обмоток.
P1 – мощность необходимая нам на выходе и принятая ранее 250 Вт.
- Вторичной: (потерями пренебрежём)
При намотке трансформатора не забываем про вытеснение тока на поверхность проводника в зависимости от частоты и производим расщепление проводника (литцендрант) или используем фольгу.
- Формула для расчёта расщепленного проводника:
Теперь не трудно посчитать и диаметр провода и раскладку провода!
В этой статье я хотел коротко и доступно рассказать о расчёте импульсного трансформатора, с разъяснением основных коэффициентов, что откуда берётся.
Также не забываем, что для более качественного расчёта необходимо использовать справочные данные магнитного элемента.
В итоге хотелось сказать, что использую даную методику уже несколько лет для расчёта как низкочастотных так и ВЧ трансформаторов.
Используемая литература:
Обрусник В.П. Магнитные элементы электронных устройств: Учебное пособие. – Томск: ТУСУР 2006 – 154 с.
Файлы:
22
Все вопросы в Форум.
Как вам эта статья? | Заработало ли это устройство у вас? |
Уже в первых экспериментах с коллекторным моторчиком и батарейкой можно было заметить, что при частом попеременном включении и выключении электромотора частота вращения его ротора изменяется. То есть происходила регулировка скорости вращения путём периодичного включения и отключения тока через моторчик. Если изменять при этом время в подключённом состоянии и длину паузы между подключениями, можно регулировать скорость вращения мотора. Такой же эффект проявляется практически с любым потребителем электрического тока, имеющим определённую инерцию, т.е. способным запасать энергию.
Именно этот эффект положен в основу принципа Широтно-Импульсной Модуляции (ШИМ), также встречается английское сокращение – PWM (Pulse-Width Modulation).
Электрический импульс – это всплеск напряжения или тока в определённом и конечном промежутке времени. Импульс всегда имеет начало (передний фронт) и конец (спад).
В цифровой электронике все сигналы могут быть представлены всего двумя уровнями напряжения: “логической единицей” и “логическим нулём”. Это всего лишь условные величины напряжения. “Логической единице” приписывается высокий уровень напряжения, обычно около 2-3 вольт, “логическим нулём” считается близкое к нулю напряжение. Цифровые импульсы графически изображаются прямоугольными или трапециевидными по форме:
Главной величиной одиночного импульса является его длина. Длина импульса – это отрезок времени, в течение которого рассматриваемый логический уровень имеет одно устойчивое состояние. На рисунке латинской буквой t отмечена длина импульса высокого уровня, то есть логической “1”. Длина импульса измеряется в секундах, но чаще в миллисекундах (мс / ms), микросекундах (мкс / μs) и даже наносекундах (нс / ns).
Чем больше импульсов, тем больше информации можно ими передать. У множества импульсов появляется много характеристик.
Частота импульсов F – это количество полных импульсов за 1 с, Гц / Hz.
Период импульсов T – это промежуток времени, между двумя характерными точками двух соседних импульсов, обычно между двух фронтов или двух спадов соседних импульсов.
T=1/F
Если длина импульса t точно равна половине периода T, то такой сигнал часто называют “меандр”.
Скважность импульсов S – отношение периода импульсов к их длительности:
S=T/t
Скважность безразмерная величина и может быть выражена в процентах.
Коэффициент заполнения / Duty cycle D – величина, обратная скважности обычно выражается в процентах:
D=1/S
Если увеличивать или уменьшать длину импульса и при этом на столько же уменьшать или увеличивать паузу между импульсами, то период следования импульсов и частота останется неизменной.
Несколько импульсов объединенных в группы с паузами определённой длины между ними называют пачками или пакетами. Генерируя разное число импульсов в группе и варьируя его, можно также передавать какую-либо информацию.
Для передачи информации в цифровой электронике можно использовать два и более проводников или каналов с разными импульсными сигналами. При этом информация передаётся с учётом определённых правил. Такой метод позволяет заметно увеличить скорость передачи информации или добавляет возможность управлением потоком информации между различными схемами.
Перечисленные возможности передачи информации с помощью импульсов могут быть использованы как сами по себе раздельно, так и в комбинации между собой.
Существуют также множество стандартов передачи информации с помощью импульсов, например I2C, SPI, CAN, USB, LPT.
Широтно-Импульсная Модуляция – это способ кодирования аналогового сигналa путём изменения ширины (длительности) прямоугольных импульсов несущей частоты.
Частота импульсов, а значит, и период T, остаются неизменными, при уменьшении ширины импульса t увеличивается пауза между импульсами (Б на Рис) и наоборот: при расширении импульса пауза сужается (В на Рис).
Зависимость напряжения от скважности ШИМ
Если сигнал ШИМ пропустить через фильтр низших частот, то уровень постоянного напряжения на выходе фильтра будет определяться скважностью импульсов ШИМ. Назначение фильтра – не пропускать несущую частоту ШИМ. Сам фильтр может состоять из простейшей интегрирующей RC цепи, или же может отсутствовать вовсе, например, если оконечная нагрузка имеет достаточную инерцию.
Таким образом, имея в расположении лишь два логических уровня, “единицу” и “ноль”, можно получить любое промежуточное значение аналогового сигнала.
Часто в схемах с ШИМ применяют обратную связь для управления длительностью импульса по той или иной закономерности, например, в схемах PID-регуляторов.
Простейшую схему ШИМ-управления можно собрать всего на нескольких транзисторах. Схема представляет собой одну из разновидностей генераторов импульсов – мультивибратор. Во время задающей цепи баз обоих транзисторов включён переменный резистор R6. Вращая его движок, можно в некоторых пределах регулировать скважность выходных импульсов.
Мультивибратор с ШИМ
Данная схема способна работать в широких пределах питающего напряжения от 5 до 15 вольт, можно использовать любые широко распространенные транзисторы и любой выпрямительный диод, номиналы сопротивлений могут отличаться на 10%. В качестве нагрузки можно использовать любой мотор, насчитанный на то напряжение питания, которым питается вся схема. Можно также подключить лампу накаливания и наблюдать изменение её яркости свечения, если подключить малогабаритный “динамик”, то при вращении движка потенциометра можно услышать изменение характера звука.
Схемы простейших широтно-импульсных модуляторов можно построить и на логических элементах, и на микросхеме универсального таймера NE555 (отечественный аналог – КР1006ВИ1), и на операционном усилителе. Существуют и специально разработанные ШИМ-контроллеры.
В большинстве этих схем для изменения ширины выходного импульса так или иначе используется аналоговое напряжение. В цифровой же электронике для прямых операций с аналоговыми сигналами необходимо усложнять схему. Поэтому схемы ШИМ-управления в цифровой технике строят на принципе отсчёта определённого числа импульсов задающего генератора. Так, задавая количество отсчитываемых импульсов, можно точно отмерять длительность выходного импульса и паузы между импульсами.
На рисунке ниже приведен один из вариантов схемы с цифровой установкой ширины выходного импульса. Схема собрана на распространённых цифровых микросхемах серии К155 (зарубежный аналог – серия 74). В качестве коммутирующего элемента P1 для эксперимента можно применить переключатель на 16 положений или просто подсоединять вход сброса RS-триггера к нужному выходу дешифратора. В реальной же схеме можно применить микросхему селектор К155КП1 с соответствующей схемой цифрового управления.
Цифровое формирование ШИМ
В этой схеме применен четырёхразрядный двоичный счётчик К155ИЕ5. Максимальное число, которое можно представить, имея четыре разряда – 16. Поэтому в этой схеме частота выходных импульсов ШИМ будет в 16 раз ниже частоты счёта счётчика. И таким же будет количество градаций регулировки ширины импульсов. При разработке цифровых устройств с ШИМ следует помнить, что чем больше разрядность ШИМ, тем больше градаций импульса можно получить и тем выше частота работы счётчика.
Практически во всех современных микроконтроллерах имеются встроенные средства формирования одного или более независимых каналов ШИМ. Очень гибкие возможности конфигурации ШИМ-формирователя микроконтроллера позволяют использовать их в разнообразных схемах электронного управления и автоматики.
Пожалуй, наиболее часто ШИМ применяется для управления различными типами моторов. Тут основным достоинством ШИМ-управления является то, что электронный ключ (обычно транзистор) работает в ключевом режиме, что заметно повышает экономичность схемы, так как потери на активных элементах сводятся к минимуму.
Кроме того, широтно-импульсная модуляция применяется для формирования аналоговых сигналов сложной формы, в импульсных стабилизаторах, для кодирования и помехозащищённой передачи аналоговой информации.
Источник:
http://www.myrobot.ruШИМ – широтно-импульсная модуляция | joyta.ru
ШИМ или PWM (англ. Pulse-Width Modulation) — широтно-импульсная модуляция — это метод предназначен для контроля величины напряжения и тока. Действие ШИМ заключается в изменении ширины импульса постоянной амплитуды и постоянной частотой.
Свойства ШИМ регулирования используются в импульсных преобразователях, в схемах управления двигателями постоянного тока или яркостью свечения светодиодов.
Принцип действия ШИМ
Принцип действия ШИМ, как указывает на это само название, заключается в изменении ширины импульса сигнала. При использовании метода широтно-импульсной модуляции, частота сигнала и амплитуда остаются постоянными. Самым важным параметром сигнала ШИМ является коэффициент заполнения, который можно определить по следующей формуле:
Также можно отметить, что сумма времени высокого и низкого сигнала определяет период сигнала:
где:
- Ton — время высокого уровня
- Toff — время низкого уровня
- T — период сигнала
Время высокого уровня и время низкого уровня сигнала показано на нижнем рисунке. Напряжение U1- это состояния высокого уровня сигнала, то есть его амплитуда.
На следующем рисунке представлен пример сигнала ШИМ с определенным временным интервалом высокого и низкого уровня.
Расчет коэффициента заполнения ШИМ
Расчет коэффициента заполнения ШИМ на примере:
Для расчета процентного коэффициента заполнения необходимо выполнить аналогичные вычисления, а результат умножить на 100%:
Как следует из расчета, на данном примере, сигнал (высокого уровня) характеризуется заполнением, равным 0,357 или иначе 37,5%. Коэффициент заполнения является абстрактным значением.
Важной характеристикой широтно-импульсной модуляции может быть также частота сигнала, которая рассчитывается по формуле:
Значение T, в нашем примере, следует взять уже в секундах для того, чтобы совпали единицы в формуле. Поскольку, формула частоты имеет вид 1/сек, поэтому 800ms переведем в 0,8 сек.
Благодаря возможности регулировки ширины импульса можно изменять, например, среднее значение напряжения. На рисунке ниже показаны различные коэффициенты заполнения при сохранении той же частоты сигналов и одной и той же амплитуды.
Для вычисления среднего значения напряжения ШИМ необходимо знать коэффициент заполнения, поскольку среднее значение напряжения является произведением коэффициента заполнения и амплитуды напряжения сигнала.
Для примера, коэффициент заполнения был равен 37,5% (0,357) и амплитуда напряжения U1 = 12В даст среднее напряжение Uср:
В этом случае среднее напряжение сигнала ШИМ составляет 4,5 В.
ШИМ дает очень простую возможность понижать напряжение в диапазоне от напряжения питания U1 и до 0. Это можно использовать, например, для регулировки яркости свечения светодиодов, или скорости вращения двигателя DC (постоянного тока), питающиеся от величины среднего напряжения.
Сигнал ШИМ может быть сформирован микроконтроллером или аналоговой схемой. Сигнал от таких схем характеризуется низким напряжением и очень малым выходным током. В случае необходимости регулирования мощных нагрузок, следует использовать систему управления, например, с помощью транзистора.
Это может быть биполярный или полевой транзистор. На следующих примерах будет использован биполярный транзистор BC547.
Пример управления светодиодом при помощи ШИМ.Сигнал ШИМ поступает на базу транзистора VT1 через резистор R1, иначе говоря, транзистор VT1 с изменением сигнала то включается, то выключается. Это подобно ситуации, при которой транзистор можно заменить обычным выключателем, как показано ниже:
Упрощенная схема управления светодиодом.Когда переключатель замкнут, светодиод питается через резистор R2 (ограничивающий ток) напряжением 12В. А когда переключатель разомкнут, цепь прерывается, и светодиод гаснет. Такие переключения с малой частотой в результате дадут мигающий светодиод.
Однако, если необходимо управлять интенсивностью свечения светодиодов необходимо увеличить частоту сигнала ШИМ, так, чтобы обмануть человеческий глаз. Теоретически переключения с частотой 50 Гц уже не незаметны для человеческого глаза, что в результате дает эффект уменьшения яркости свечения светодиода.
Чем меньше коэффициент заполнения, тем слабее будет светиться светодиод, поскольку во время одного периода светодиод будет гореть меньшее время.
Такой же принцип и подобную схему можно использовать и для управления двигателем постоянного тока. В случае двигателя необходимо, однако, применять более высокую частоту переключений (выше 15-20 кГц) по двум причинам.
Первая из них касается звука, какой может издавать двигатель (неприятный писк). Частота 15-20 кГц является теоретической границей слышимости человеческого уха, поэтому частоты выше этой границы будут неслышны.
Второй вопрос касается стабильности работы двигателя. При управлении двигателем низкочастотным сигналом с малым коэффициентом заполнения, обороты двигателя будут нестабильны или может привести к его полной остановке. Поэтому, чем выше частота сигнала ШИМ, тем выше стабильность среднего выходного напряжения. Также меньше пульсаций напряжения.
Не следует, однако, слишком завышать частоту сигнала ШИМ, так как при больших частотах транзистор может не успеть полностью открыться или закрыться, и схема управления будет работать не правильно. Особенно это относится к полевым транзисторам, где время перезарядки может быть относительно большое, в зависимости от конструкции.
Слишком высокая частота сигнала ШИМ также вызывает увеличение потерь на транзисторе, поскольку каждое переключение вызывает потери энергии. Управляя большими токами на высоких частотах необходимо подобрать быстродействующий транзистор с низким сопротивлением проводимости.
Управляя двигателем постоянного тока с помощью ШИМ, следует помнить о применении диода для защиты транзистор VТ1 от индукционных всплесков, появляющимся в момент выключения транзистора. Благодаря использованию диода, индукционный импульс разряжается через него и внутреннее сопротивление двигателя, защищая тем самым транзистор.
Схема системы управления скоростью вращения двигателя постоянного тока с защитным диодом.Для сглаживания всплесков питания между клеммами двигателя, можно подключить к ним параллельно конденсатор небольшой емкости (100nF), который будет стабилизировать напряжение между последовательными переключениями транзистора. Это также снизит помехи, создаваемые частыми переключениями транзистора VT1.
[Перейти к оглавлению]
DUTY CYCLE
Рабочий цикл (или коэффициент заполнения) является мерой доли времени, которое передает радиолокатор. Это важно, потому что это относится к пику и средняя мощность при определении общей выработки энергии. Это, в свою очередь, в конечном итоге также влияет на силу отраженного сигнала. в качестве требуемой мощности источника питания и требований к охлаждению передатчика.
Хотя есть исключения, большинство радиочастот
Измерения (RF) являются либо непрерывными волнами (CW), либо импульсными RF. CW RF – это непрерывный RF, например, от генератора. Амплитудно-модулированный (AM),
RF с частотной модуляцией (FM) и с фазовой модуляцией (PM) считаются CW, поскольку RF постоянно присутствует. Мощность может меняться со временем из-за
для модуляции, но РФ всегда присутствует. Импульсная РЧ, с другой стороны, является пачками (импульсами) РЧ без РЧ между пакетами. Большинство
Общий случай импульсного ВЧ состоит из импульсов с фиксированной шириной импульса (PW), которые поступают через фиксированный интервал времени или период (T).Для ясности и
Для простоты этого обсуждения предполагается, что все радиочастотные импульсы в последовательности импульсов имеют одинаковую амплитуду. Импульсы с фиксированным интервалом времени поступают
со скоростью или частотой, называемой частотой повторения импульсов (PRF), равной такому количеству импульсов в секунду. Интервал повторения импульсов (PRI) и
PRF взаимны друг с другом.
[1] PRF =
1 / T = 1 / PRI
Измерения мощности классифицируются как пиковая мощность импульса, P p , или средняя мощность, P ave .
фактическая мощность в импульсной РЧ происходит во время импульсов, но большинство методов измерения мощности измеряют эффекты нагрева энергии РЧ для получения
среднее значение мощности. Правильно использовать любое значение для справки, если одно или другое постоянно используется. Часто
необходимо преобразовать из P p в P пр. или наоборот; поэтому отношения между ними должны быть поняты.
На рисунке 1 показано сравнение между P , p и P , пр. .
Рис. 1. РЧ импульсный набор
Среднее значение определяется как уровень, где область импульса выше среднего равна площади ниже среднего между импульсами. Если импульсы выравниваются таким образом, чтобы заполнить область между импульсами, полученный уровень является средним значением, как показано на рисунке 1, где заштрихованная область импульса используется для заполнения области между импульсами. Площадь импульса – это ширина импульса, умноженная на пиковый импульс мощность.Средняя площадь равна среднему значению мощности, умноженному на период импульса.
С два значения равны:
[2] P пр. x T = P p x PW
или
[3] P пр. / P р = PW / T
Использование [1]
[4] P пр. / P р = PW / T = PW x PRF = PW / PRI = рабочий цикл
(обратите внимание, что символ τ представляет ширину импульса (PW) в большинстве справочников)
Отношение средней мощности к пиковой мощности импульса является рабочим циклом и представляет процент времени, в течение которого мощность присутствует.в В случае прямоугольной волны коэффициент заполнения равен 0,5 (50%), поскольку импульсы присутствуют в 1/2 раза, определение прямоугольной волны.
Для На рисунке 1 ширина импульса составляет 1 единицу времени, а период составляет 10 единиц. В этом случае рабочий цикл составляет:
PW / T = 1/10 = 0,1 (10%).
Более типичным случаем будет PRF 1000 и длительность импульса 1,0 микросекунды. Используя [4], рабочий цикл составляет 0,000001 x 1000 = 0,001. ВЧ-мощность присутствует в тысячной части времени, а средняя мощность равна 0.001 раз пиковая мощность. И наоборот, если мощность была измерена с Измеритель мощности, который реагирует на среднюю мощность, пиковая мощность будет в 1000 раз больше среднего значения.
Помимо выражения рабочего цикла как отношение, полученное в уравнении [4], оно обычно выражается в процентах или в децибелах (дБ). Выразить коэффициент заполнения уравнения [4] в процентах, умножьте полученное значение на 100 и добавьте символ процента. Таким образом, коэффициент заполнения 0,001 также составляет 0,1%.
пошлина цикл может быть выражен логарифмически (дБ), так что он может быть добавлен или вычтен из мощности, измеренной в дБм / дБВт, а не преобразован в, и используя абсолютные единицы.
[5] Рабочий цикл (дБ) = 10 log (рабочий цикл) коэффициент)
Для примера рабочего цикла 0,001 это будет 10 log (0,001) = -30 дБ. Таким образом, средняя мощность будет на 30 дБ меньше, чем пиковая мощность. И наоборот, пиковая мощность на 30 дБ выше средней мощности.
Для импульсных радаров, работающих в диапазоне PRF 0,25-10
Для радиолокаторов с частотой кГц и частичной частотой, работающих в диапазоне PRF 10–500 кГц, типичные рабочие циклы будут:
Пульс: 0.1 – 3% = 0,001 – .03 = от -30 до -15 дБ
Импульсный допплер: 5 – 50% = 0,05 – .5 = от -13 до -3 дБ
Непрерывная волна:
100% = 1
= 0 дБ
Промежуточные частоты Полосы типичных сигналов:
Пульс От 1 до 10 МГц
ЧИП или Фазо-кодированный импульс от 0,1 до 10 МГц
CW или PD
0.От 1 до 5 кГц
обычно подразделяется на следующие категории: низкие 0,25-4 кГц; Средняя 8-40 кГц; Высокие 50-300 кГц.
Оглавление по электронике. Руководство по военной и радиолокационной технике.
Введение |
Сокращения | Децибел | обязанность
Цикл | Доплеровский сдвиг | Радар Горизонт / Линия
зрения | Время распространения / Разрешение | модуляция
| Преобразования / Вейвлеты | Антенна Введение
/ Основы | Поляризация | Радиационные паттерны |
Частота / Фаза Эффектов Антенн |
Антенна возле поля | Радиационной опасности |
Плотность мощности | Одностороннее радиолокационное уравнение / радиочастотное распространение
| Двустороннее радиолокационное уравнение (моностатическое) |
Альтернативное двустороннее радиолокационное уравнение |
Двустороннее радиолокационное уравнение (бистатическое) |
Соотношение помех / сигналов (J / S) – постоянная мощность [насыщен]
| Поддержка Jamming | Сечение радара (RCS) |
Контроль выбросов (EMCON) | РФ атмосферный
Абсорбция / Воздуховоды | Чувствительность приемника / шум |
Типы и характеристики приемника |
Основные типы дисплея радара |
IFF – Идентификация – Друг или Враг | Приемник
Тесты | Методы сортировки сигналов и определения направления |
Коэффициент стоячей волны напряжения (КСВН) / Коэффициент отражения / Возврат
Потеря / Несоответствие Потери | Микроволновые коаксиальные соединители |
Делители / Комбайнеры и Направленные ответвители |
Аттенюаторы / Фильтры / Блоки DC |
Завершения / Макетные грузы | циркуляционные
и диплексеры | Смесители и частотные дискриминаторы |
Детекторы | Микроволновые измерения |
Микроволновые волноводы и коаксиальный кабель |
Электрооптика | Лазерная безопасность |
Число Маха и скорость полета противВысота Маха Номер |
EMP / Размеры самолета | Шины данных | Интерфейс RS-232
| Интерфейс сбалансированного напряжения RS-422 | Интерфейс RS-485 |
Интерфейсная шина IEEE-488 (HP-IB / GP-IB) | MIL-STD-1553 &
1773 Шина данных |
Эта HTML-версия может быть напечатана, но не воспроизведена на веб-сайтах.
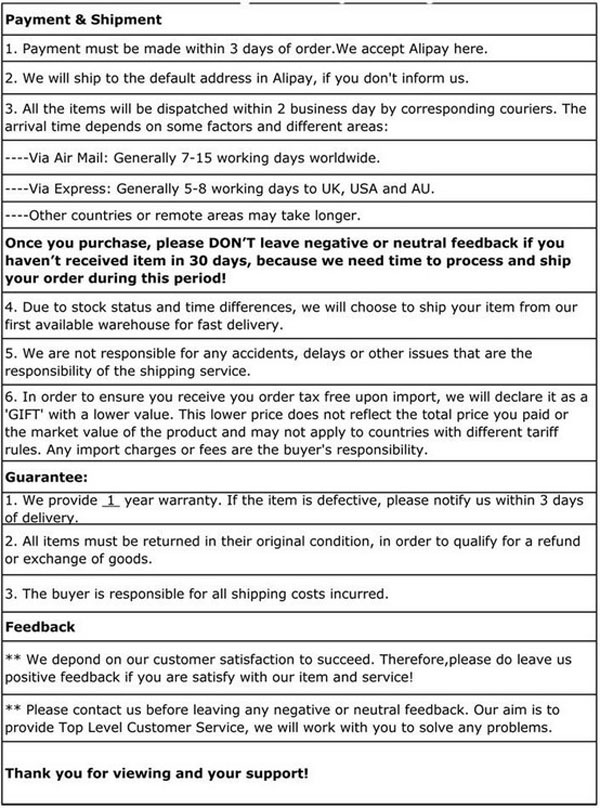
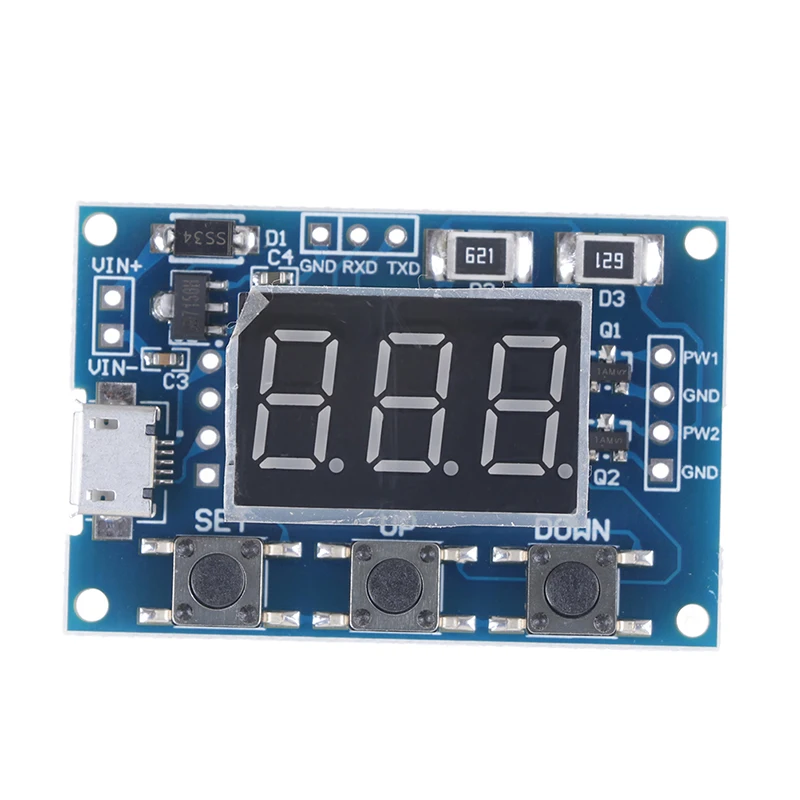
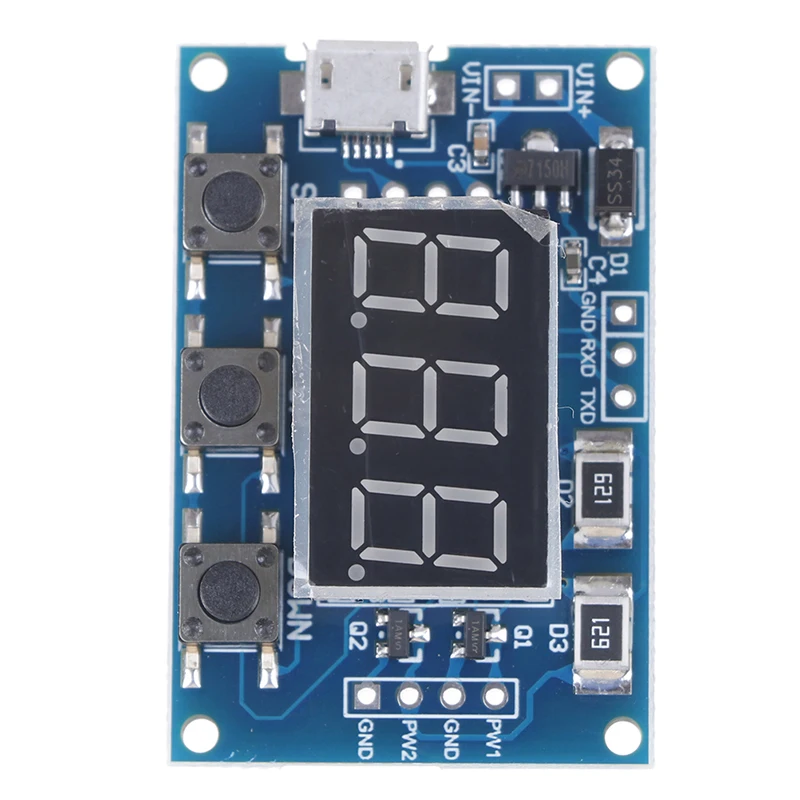
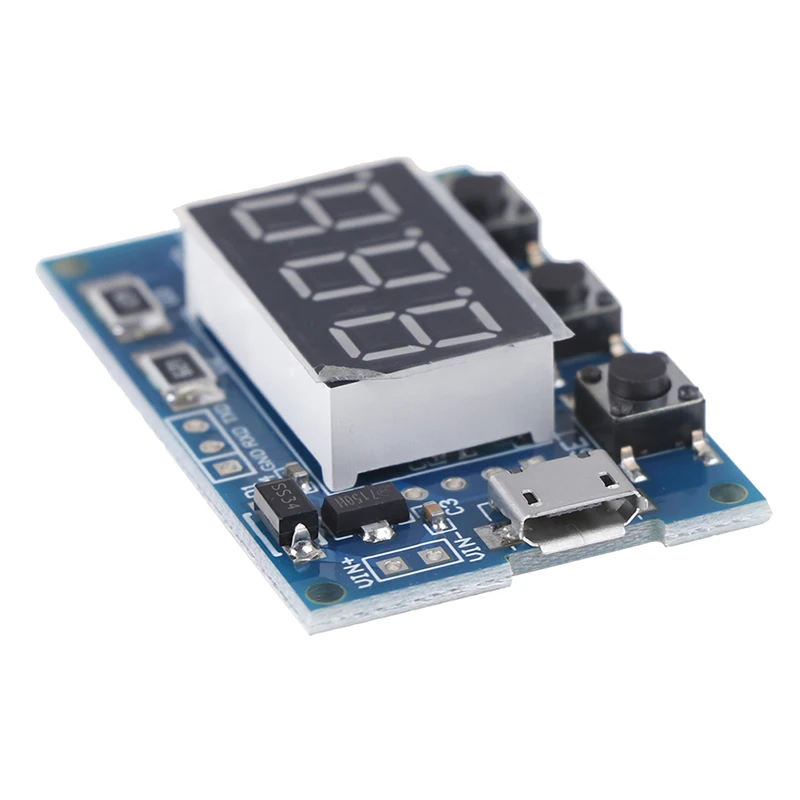
Высокочастотный импульсный генератор сигналов прямоугольной формы Чистый утвердительный сигнал Цифровой синтез ШИМ Регулируемый рабочий цикл
Описание:
1 цифровой синтез, форма сигнала чистая, без плохих гармоник
2 рабочих цикла 0-100% регулируемый линейный отлично.
3.инвертор. осциллятор. мощность света, широко использовать
4.Частота: 100 кГц
Встроенная регулировка рабочего цикла, внешний метод управления рабочим циклом —— 1. Отрегулируйте встроенный потенциометрасамый маленький внешний потенциометр, чтобы играть роль. 2, когда внешний потенциометр не использует подвесной или плавающий, встроенный Потенциометр также играет роль.
В пакет включено:
1 * Генератор прямоугольных сигналов

10 шт. / Лот Измерение скорости вращения двигателя Фотоэлектрический датчик Модуль инфракрасного датчика скорости счетаUS $ 43.68 / лотшт. / Лот |
2 шт. / Лот ZigBee Module CC2530 Модуль Расстояние 250 мUS $ 35,07 / Многошт. / Лот |
FT232RL USB-адаптер для последовательного порта Foca Совместим с USB-адаптером XBeeUS $ 11.66 / шт. |
10 шт. / Лот 5 В Пассивный модуль зуммера Плата управления зуммеромUS $ 16.34 / лотшт. / Лот |
5 шт. / Лот 2-канальный модуль реле 5 В для 8051 AVR PIC DSP ARMUS $ 13.77 / лотшт. / Лот |
5 шт. / Лот ARM MCU Development Learn Детали платы ARM Основной модуль платы STM32 Основной модульUS $ 44.23 / партияшт. / Лот |
5 шт. / Лот DC 2.Модуль ультразвукового датчика 4 В ~ 5,5 В США-100 с температуройUS $ 22,00 / лотшт. / Лот |
10 x TEC1-12706 91,2 Вт TEC Термоэлектрический охладитель ПельтьеUS $ 32,71 / лотшт. / Лот |
Особенности:
1. Новое и высокое качество.
2. Подходит для последовательной связи.
3. Широкий частотный диапазон, высокая точность.
4. Два независимых генератора ШИМ могут устанавливать частоту и рабочий цикл.
Параметры модуля:
1.Рабочее напряжение: 5–30 В, поддержка микро USB 5.0 В блок питания.
2. Частотный диапазон: 1 Гц ~ 150 кГц.
3. Точность частоты: ± 2%.
4. Выходной ток: <30 мА.
5. Выходная амплитуда: по умолчанию 5Vp-p (настраивается).
6. Диапазон рабочих температур: -30 ~ + 70 °.
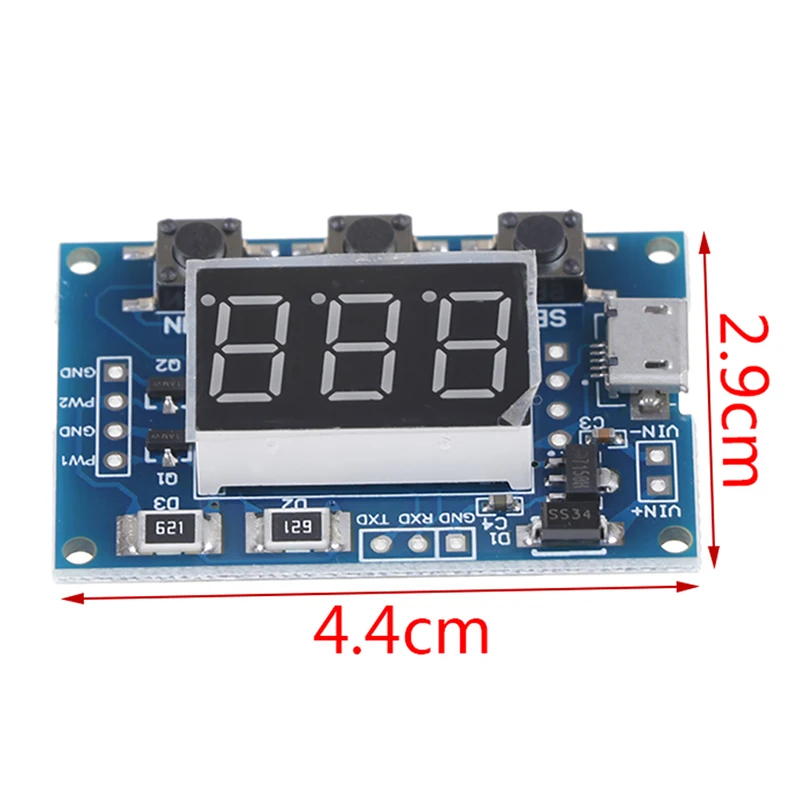
7. Размер продукта: 4,3×2,9×0,9 см – 1,69×1,14×0,35in
Параметры:
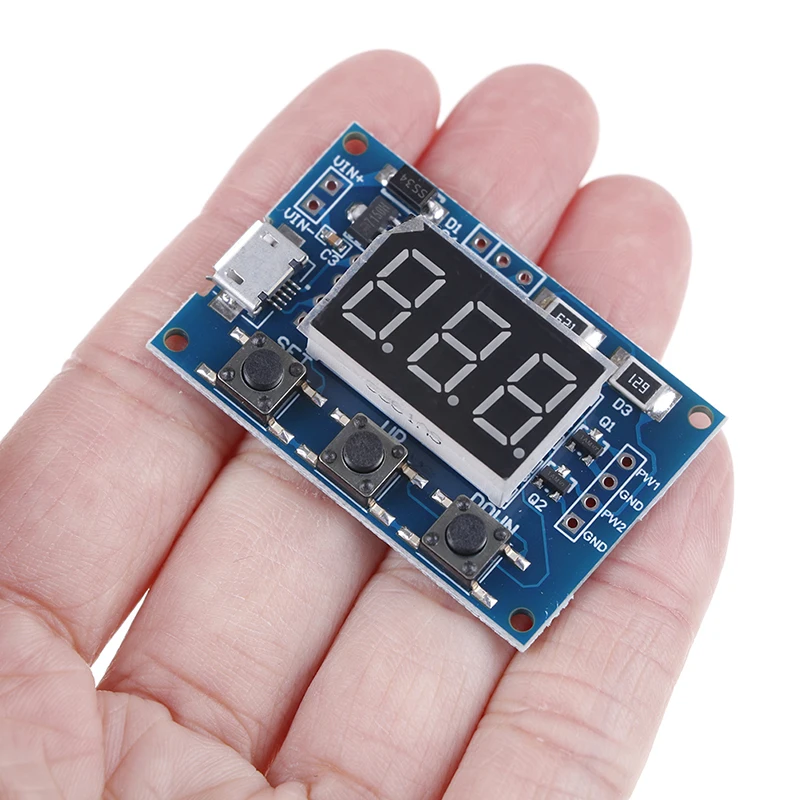
1.Модуль имеет три кнопки: [Установить], [Вверх], [Вниз].
2. Нажмите клавишу [Set], чтобы переключить отображение четырех параметров (FR1: частота ШИМ1; dU1: рабочий цикл ШИМ1; FR2: частота ШИМ2; dU2: рабочий цикл ШИМ2), перед параметрами передачи произойдет мигает соответствующее имя параметра.
3. Нажимайте клавиши [Вверх], [Вниз], чтобы изменить текущее значение параметра (длительное нажатие может быстро увеличивать или уменьшать).
4. Каждый из двух ШИМ имеет три предустановленных частоты, и в интерфейсе отображения частоты нажмите и удерживайте клавишу [SET], чтобы переключаться между тремя типами частот, три вида частотного коэффициента заполнения одинаковы.(XXX: диапазон 1 Гц ~ 999 Гц; XX.X: диапазон 0,1 кГц ~ 99,9 кГц; X.X.X.: Диапазон 1 кГц ~ 150 кГц,).
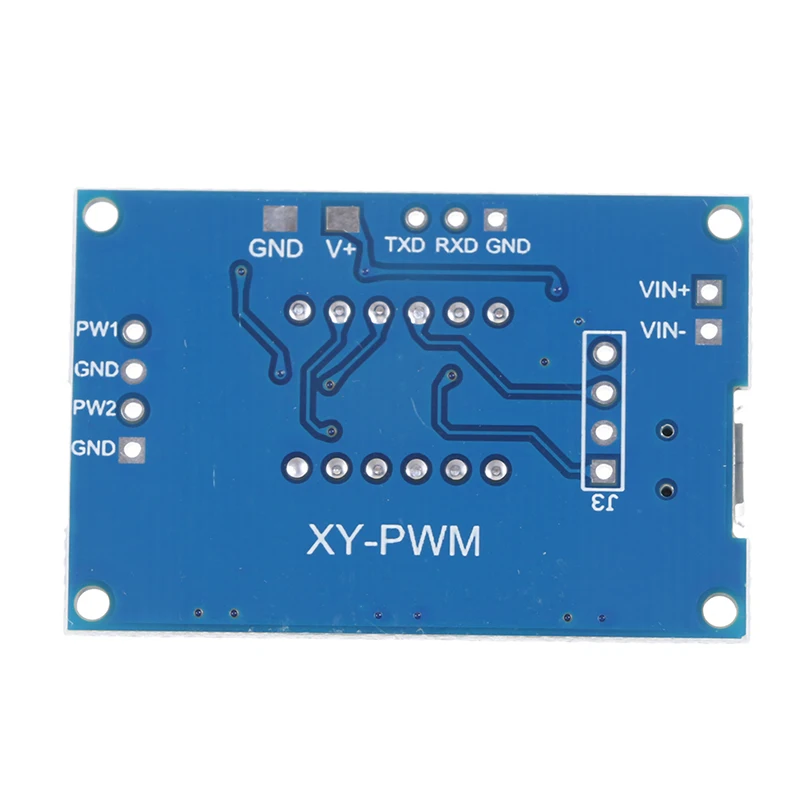
Во-первых, описание модуля:
Частота разделена на три диапазона:
1.XXX (без десятичной точки): наименьшая единица составляет 1 Гц, диапазон 1 Гц ~ 999 Гц;
2.XX.X (десятичная точка в десяти): минимальная единица измерения составляет 0,1 кГц; диапазон 0,1 кГц ~ 99,9 кГц
3.X.X.X. (есть три десятичных знака): наименьшая единица составляет 1 кГц; диапазон 1 кГц ~ 150 кГц
Пример отображения частоты:
«100» означает, что импульсный выходной сигнал ШИМ равен 100 Гц;
“54.1 “указывает, что выходной импульс ШИМ равен 54,1 кГц;
” 1.2.4. “Указывает, что импульсный выходной сигнал ШИМ 124 кГц
работает в диапазоне: от 0 до 100;
Рабочий цикл трех частот одинаковые, все параметры энергонезависимые
Применимые области применения:
1. Сформировать прямоугольный сигнал для экспериментальной разработки в качестве генератора прямоугольных сигналов.
2. Генерация прямоугольного сигнала для драйвера шагового двигателя.
3. Для генерации настраиваемой генерации импульсов для использования микросхемы.
4. Сформировать переменный импульсный сигнал для управления соответствующей цепью (регулировка яркости, скорость).
В-четвертых, сфера применения:
1. Генератор прямоугольных сигналов, который генерирует прямоугольные сигналы;
2. Подать сигнал на драйвер шагового двигателя;
3. Регулируемая генерация импульсов для использования микросхем;
4.Произведите переменный импульсный сигнал, связанный с цепью управления (ШИМ, затемнение, скорость).
В-пятых, последовательный контроль
Скорость передачи: 9600 бит / с
Биты данных: 8
Стоповые биты: 1
Бит четности: нет
Управление потоком: отсутствует
Управление потоком: отсутствует
Управление потоком: отсутствует
Управление потоком: отсутствует
1, установите частоту ШИМ
«S1FXXXT»: настройка частоты ШИМ1 в XXX Гц (001 ~ 999)
«S1FXX.XT “: установка частоты ШИМ1 XX.X КГц (00.1 ~ 99.9)
” S1F: XXXT “: настройка частоты ШИМ1 XXX КГц (0.0.1 ~ 1.5.0 ..)
‘S1’: ШИМ1
‘S2’: ШИМ2
‘F’: частота
‘D’: рабочий цикл
‘T’ является конечным флагом
Установить рабочий цикл ШИМ
XXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXX выход в ВРЕЗ. : настройка рабочего цикла PXM1 XXX; (001 ~ 100)
“S2DXXXT”: установка рабочего цикла PWM2 XXX; (001 ~ 100)
Настройка успешного возврата: ВНИЗ;
Задание сбоя установки: FALL.
В пакет включено:
1 х Генератор сигналов



Больше новостей
