
Число полюсов – Энциклопедия по машиностроению XXL
Число полюсов 2р 4. Число пазов 1-24 [c.191]Число полюсов 2р-6. Число пазов г-45 [c.191]
Прежде всего в качестве такой особенности следует отметить значительное количество и разнообразие параметров, характеризующих ЭМУ. Сюда относятся геометрические размеры конструктивных элементов, характеристики электротехнических, магнитных, изоляционных, конструкционных и других материалов, используемых в производстве ЭМУ, обмоточные данные, параметры источников питания. Их общее число, как показывает практика оптимизации таких объектов, в ряде случаев достигает 100—150 [7, 19]. При этом такие параметры, как геометрические размеры, являются непрерывными величинами, другие, например числа полюсов, зубцов, витков, — дискретными, что приводит к нарушению монотонности изменения функции цели и существенно затрудняет поиск ее экстремума. Для примера на рис.
В случае необходимости с помощью данного механизма можно осуществить регулирование скорости опускания груза. При пологой характеристике число оборотов двигателя, работающего на спуск груза, близко к числу его оборотов на холостом ходу. Это позволяет производить изменение скорости опускания путем изменения числа оборотов холостого хода переключением числа полюсов трехфазных электродвигателей или изменением магнитного поля двигателей постоянного тока. Весьма точное регулирование скорости спуска можно произвести даже при трехфазном двигателе введением в систему рычагов дополнительной пружины 1, имеющей предварительное натяжение (фиг.
 213, а). При наличии такой пружины корпус вспомогательного двигателя при повороте под действием реактивного момента прежде, чем он разомкнет тормоз, должен преодолеть усилие пружины 1. В зависимости от включенной в данный момент ступени сопротивления двигатель работает на одной из искусственных характеристик а—[c.326]
213, а). При наличии такой пружины корпус вспомогательного двигателя при повороте под действием реактивного момента прежде, чем он разомкнет тормоз, должен преодолеть усилие пружины 1. В зависимости от включенной в данный момент ступени сопротивления двигатель работает на одной из искусственных характеристик а—[c.326]Наиболее простыми являются электромагнитные соленоидные шаговые двигатели (рис. 122, а), сердечник (якорь) которых связан с ведомым валом привода обычно храповым устройством. Реверсирование обеспечивается постановкой спаренных соленоидов (рис. 122, б). Однофазный нереверсивный шаговый электродвигатель с вращающимся двухполюсным ротором (рис. 123, а) имеет на статоре одну пару полюсов из постоянных магнитов, другую — с обмотками управления. При отсутствии тока в обмотке ротор устанавливается в положение, показанное на рисунке. При подаче в обмотку электрического импульса ротор поворачивается на 90°, причем направление поворота совпадает с направлением клюва у полюсов ротора 2.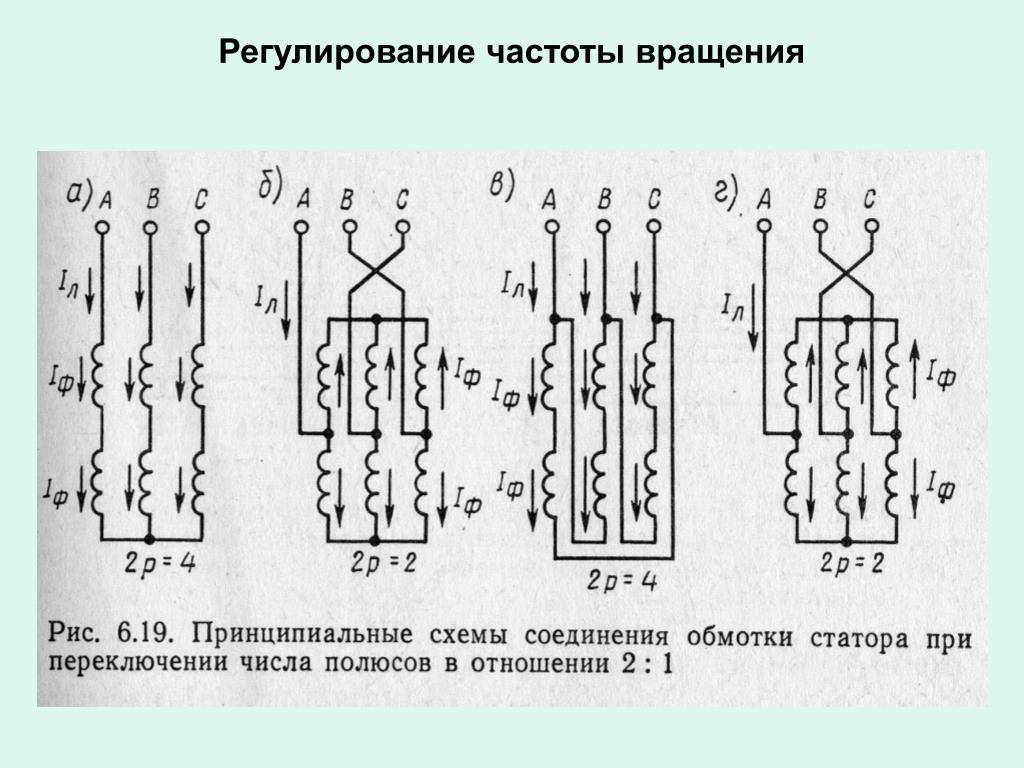
Конструктивное отличие основания ряда и одной производной гидрогенератора от другой состоит главным образом только в разных длинах активной стали генератора, в числе полюсов и в различных комбинациях числа витков обмотки статора. [c.96]
Каждая из гармоник имеет свое число полюсов, свою скорость вращения и частоту изменения и создает в данной точке воздушного зазора определенную индукцию, являющуюся функцией пространственных и временных координат. [c.259]
Привод насоса с двухскоростным асинхронным электродвигателем выгодно отличается из-за его простоты.
 Снижение частоты вращения происходит ступенчато за счет подключения обмотки, с большим числом полюсов. Обмотка малой скорости может быть выполнена независимо от обмотки большой скорости и подключаться к автономной сети аварийного источника. На рис. 4.26 приведена схема включения двухскоростного электродвигателя. Достоинства данного привода следующие относительная простота конструкции простота схемы управления
[c.130]
Снижение частоты вращения происходит ступенчато за счет подключения обмотки, с большим числом полюсов. Обмотка малой скорости может быть выполнена независимо от обмотки большой скорости и подключаться к автономной сети аварийного источника. На рис. 4.26 приведена схема включения двухскоростного электродвигателя. Достоинства данного привода следующие относительная простота конструкции простота схемы управления
[c.130]Коробки скоростей в сочетании с асинхронными двигателями с переменным числом полюсов 9 — 26
Шкивно-ступенчатые передачи металлорежущих станков 9—17 Шкивно-ступенчатые приводы металлорежущих станков от асинхронных двигателей с переменным числом полюсов 9 — 26 Шкивы — Обработка 7 — 161 — Технологические маршруты 7—162 [c.347]
Согласно зависимости (19) опрокидывающий момент в генераторном режиме имеет большее значение, чем в двигательном режиме. Максимальное скольжение для обоих режимов одно и то же. На фиг. 29 представлены кривые моментов двигателя с переключением полюсов. Верхняя кривая Пд относится к меньшему числу полюсов, нижняя щ — к большему. Положим, что привод работал в точней.
[c.17]
На фиг. 29 представлены кривые моментов двигателя с переключением полюсов. Верхняя кривая Пд относится к меньшему числу полюсов, нижняя щ — к большему. Положим, что привод работал в точней.
[c.17]
Для торможения машина переключается на другое число полюсов и с первой характеристики переходит на вторую, попадая в генераторный режим. При снижении скорости привода от точки Ь до точки с машина будет давать торможение, работая как асинхронный генератор. Далее, для полной остановки, от точки г до переходят на противовключение. [c.17]
Первые синхронные генераторы, приводимые в действие паровыми машинами или двигателями внутреннего сгорания через ременную передачу, работали с малым числом оборотов окружная скорость ротора для таких машин составляла не более 15—25 м/с. С ростом мощности электрических генераторов повышалось требование равномерности вращения, что не обеспечивалось ни паровой машиной, ни двигателями внутреннего сгорания с их пульсирующим движением поршня и кривошипно-шатунным механизмом. В связи с этим в начале 90-х годов были разработаны специальные генераторы маховикового типа, в которых для уменьшения неравномерности хода была увеличена инерция вращающихся частей. В этих генераторах вращающиеся индукторы одновременно играли роль маховиков для первичного двигателя. Первичные поршневые двигатели накладывали определенные ограничения на конструкции синхронных генераторов их приходилось строить с большим числом полюсов, что, в свою очередь, увеличивало расход активных материалов и потери энергии в машине. Таким образом, хотя паровая машина к концу XIX в. достигла высокой степени совершенства, она не годилась для привода мощных электрических генераторов, так как не позволяла сконцентрировать большие мощности в одном агрегате и создать требуемые высокие скорости вращения. На смену паровым машинам пришли паровые турбины. Первоначально использовали сравнительно тихоходные турбины конструкции шведского инженера Г. П. Лаваля [35].
В связи с этим в начале 90-х годов были разработаны специальные генераторы маховикового типа, в которых для уменьшения неравномерности хода была увеличена инерция вращающихся частей. В этих генераторах вращающиеся индукторы одновременно играли роль маховиков для первичного двигателя. Первичные поршневые двигатели накладывали определенные ограничения на конструкции синхронных генераторов их приходилось строить с большим числом полюсов, что, в свою очередь, увеличивало расход активных материалов и потери энергии в машине. Таким образом, хотя паровая машина к концу XIX в. достигла высокой степени совершенства, она не годилась для привода мощных электрических генераторов, так как не позволяла сконцентрировать большие мощности в одном агрегате и создать требуемые высокие скорости вращения. На смену паровым машинам пришли паровые турбины. Первоначально использовали сравнительно тихоходные турбины конструкции шведского инженера Г. П. Лаваля [35].
Двигателями с несколькими ступенями скорости (многоскоростными) называются такие двигатели, скорость вращения которых можно изменять ступенями путем изменения числа полюсов (асинхронные короткозамкнутые двигатели со специальной обмоткой в стл-торе).
Число полюсов двигателя можно изменять также, устраивая на статоре Д1 е или несколько обмоток на различное число полюсов. [c.419]
Рубильники и рубящие переключатели строятся на токи от 60 до 1000 л для работы в сетях напряжением до 500 в. Могут иметь центральную рукоятку, боковой или рычажный привод. Число полюсов 1, 2 или 3. Рубильники до 200 а могут поставляться в кожухе и с пристроенными блок-контактами. [c.433]
Число полюсов двигателя можно изменять также, устраивая на статоре две [c.514]
Со ступсн4латым регулированием скорости не свыше 6 1 и не слишком частыми пуск ами Асинхронные электродвигатели с к. 3. ротором и переключением числа полюсов Металлорежущие станки малой мощности лифты со скоростью дви жения до 1 м/с [c.125]
Функция ф(Я) — мероморфная, для которой согласно принципу аргумента (см.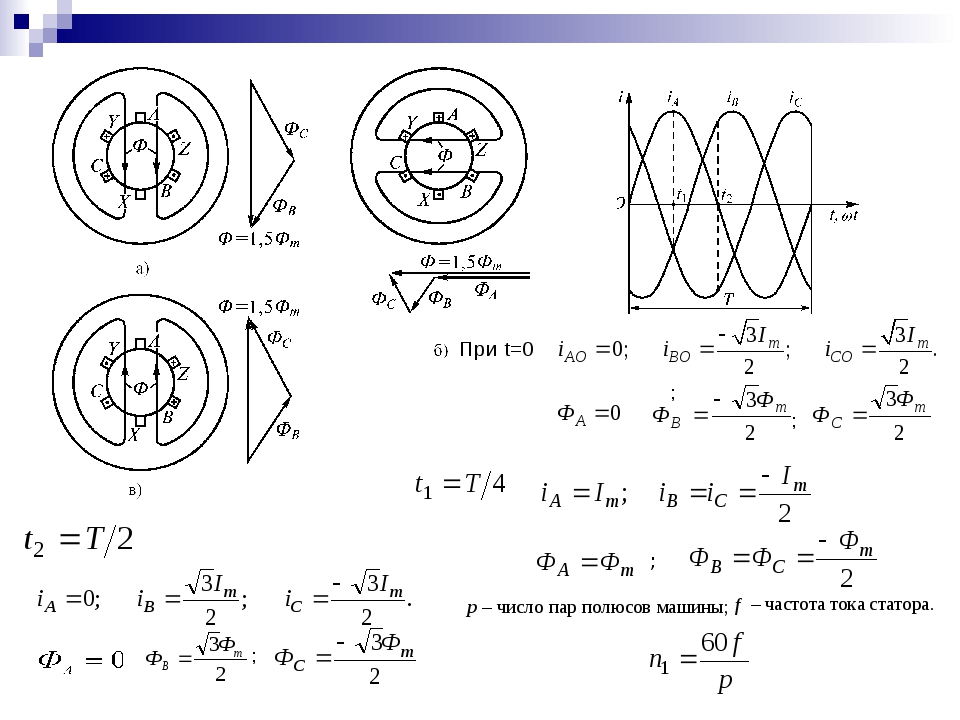
Кроме числа полюсов, угол шагового поворота зависит также от схемы управления двигателем. Она может быть трех- или шеститакт-ной, т. е. полный цикл переключения статорных обмоток может осуществляться за 3 или 6 управляющих импульсов. При шести-тактной системе частота срабатывания в 2 раза выше, чем при трехтактной. При первом такте напряжение в этом случае подается на первую обмотку статора, при втором — на первую и вторую, при третьем — только на вторую, при четвертом — на вторую и третью, при пятом — только на третью, при шестом — на третью и первую. [c.202]
Тип ввигатв оя Число ПОЛЮСОВ Габаритные размеры Установочные и при [c.542]
Приводы ступенчато-шкивные от асннхрон ных двигателей с переменным числом полюсов 9 — 2в
[c. 148]
148]
Обш,ие сведения. Трёхфазные асинхронные двигатели являются наиболее распространённым типом электродвигателей. Асинхронный двигатель состоит из неподвижного статора и вращающегося ротора. Статор асинхронного двигателя конструктивно аналогичен статору синхронной машины. Ротор — цилиндрическое тело из листовой динамной стали с обмоткой, уложенной в пазы, выштампованные на наружной поверхности. При питании обмотки статора трёхфазным током она создаёт в воздушном промежутке вращающееся магнитное поле. Число полюсов этого поля определяется типом обмотки. Скорость вращения поля или синхронная скорость [c.536]
Фазный ротор имеет трёхфазную обмотку с числом полюсов, равным числу полюсов обмотки статора. Концы обмотки ротора присоединены к трём кольцам, изолированным друг от друга и от вала. С помощью этих колец и щёток в цепь ротора может включаться добавочное сопротивление. Коротко-замкнутый ротор имеет обмотку, состоя- [c.536]
Число максимумов первичного тока, а следовательно, число искр на один оборот магнето зависит от числа полюсов магнита, поэтому данный тип магнето может быть выполнен многоискровым (с любым чётным числом искр на один оборот), что и является его основным принципиальным преимуществом. [c.317]
[c.317]
Направление вращения (со стороны привода). . Число полюсов Марка щёток. . Нажатие на шётки в г … [c.326]
Экономические ступени скорости осуществляются переключением числа полюсов и каскадным включением двух двигателей. Число ступеней две-три, редко больше трёх. Наличие нескольких ступеней позволяет в известной степени приблизиться к свойствам сериесного двигателя путём перехода на тяжёлых участках пути на низшие ступени. Однако малое число ступеней ограничивает эту возможность, в связи с чем при равных средних скоростях движения мощность асинхронных двигателей должна быть на 20—ЗОО/д больше, чем сериес-ных двигателей. [c.456]
У быстроходных рольгангов двигатель соединяется с роликом непосредственно через муфту, а у тихо.ходных рольгангов, чтобы не иметь дорогого двигателя с большим числом полюсов, — через редуктор, пониисающий число оборотов ролика. В последнем случае электрическая часть рольганга удешевляется, так как двигатели требуются с меньшим числом полюсов и с более низким вращающим моментом, но вместо этого усложняется конструкция самого ролика. Из наиболее характерных конструкций роликов этого типа еле
[c.1023]
Из наиболее характерных конструкций роликов этого типа еле
[c.1023]
Б. Ступенчато-шкавныепри-воды от асинхронных электродвигателей с переменным числом полюсов. 2 =4ч-9 =3-5-8 iV—до 5 кет. Приводы очень просты. Автоматическое регулирование возможно за счёт двигателя. Применение — лёгкие быстроходные станки [c.26]
Для д н и г а т е л е й с к о р о т к о-зам кнуты м ротором применяется ступенчатое регулирование скорости вращения изменсние.м числа полюсов. Из формулы [c.419]
В двигателе с короткозамкнутым ротором необходимо из.менять число полюсов только на стато е, так как беличья клетка всегда образует столько >1(с по- 9- [c.419]
НОСОВ, сколько и обмотка статора. В двигателе С фазовым ротором необходимо одновременно из е-нять число полюсов R обмотках статора н ротора. Этозначитель-но усложняет конструкцию двигателя. [c.419]
Выпускаются таклсе двухскоростные электродвигатели с числом полюсов 6/12, 6/16 и 6/20 в диапазоне мощностей от 1 до 22 кет и двигатели металлургического исполнения МТМ и МТКМ с изоляцией классов F и Н, предназначенные для тяжелых режимов работы. [c.233]
[c.233]
Изменение числа полюсов. Для двигателей с короткозамкну-гым ротором применяется ступенчатое регулирование скорости вращения изме-. лением чйсла полюсов. [c.514]
Методы регулирования частоты вращения двигателей
Частота вращения асинхронного двигателя определяется скоростью вращения магнитного поля и числом полюсов. Существуют два основных способа регулировать частоту вращения асинхронного двигателя: включение резисторов в цепь фазного ротора, изменение количества полюсов, образующих вращающееся магнитного поля.
Для осуществления первого способа применяются двигатели с фазными роторами. При этом в цепь двигателя вводят трехфазный реостат, который должен быть рассчитанным на длительную нагрузку током ротора. При увеличении активного сопротивления цепи изменяется характеристика М = F (s) — она становится более пологой.
Если, не изменяя момента на валу двигателя, увеличить сопротивление цепи ротора постепенным увеличением сопротивления реостата, рабочая точка сместится с одной кривой M = F (s) на другую, которая соответствует увеличенному сопротивлению цепи ротора, т. е. будет расти скольжение, и поэтому снизится частота вращения двигателя. Таким способом изменяется частота вращения ротора от номинального скольжения до абсолютной остановки. Недостатком способа являются слишком большие потери энергии.
е. будет расти скольжение, и поэтому снизится частота вращения двигателя. Таким способом изменяется частота вращения ротора от номинального скольжения до абсолютной остановки. Недостатком способа являются слишком большие потери энергии.
Зная отношение величин можно сделать вывод, что доля механической мощности уменьшается с уменьшением частоты ротора, при этом возрастает величина потерь в сопротивлениях цепи ротора. Мощность, которую забирает двигатель из сети, не изменяется, т. е. для уменьшения скорости вращения двигателя необходимо включить в цепь ротора сопротивление, которое вынуждает превращаться в тепло большую часть энергии. Среди недостатков данного способа является то, что включение сопротивления уменьшает устойчивость работы двигателя, поскольку небольшое изменение нагрузки приводит к значительным изменениям частоты вращения двигателя.
Для плавного регулирования частоты вращения двигателя в цепи изменяют напряжение на зажимах статора. Такой вид регулирования применим к двигателям с короткозамкнутым ротором. Если учесть, что вращающий момент двигателей прямо пропорционален квадрату напряжения, координата механической характеристики уменьшается в отношении.
Если учесть, что вращающий момент двигателей прямо пропорционален квадрату напряжения, координата механической характеристики уменьшается в отношении.
Скачкообразное изменение скоростей вращения двигателя возможно осуществить усложнением конструкций асинхронных двигателей. Оно связано с переключением числа полюсов двигателей. Подобным образом будут отличаться и частоты вращения ротора двигателя. Обмотку ротора двигателя в этом случае нужно выполнить в форме беличьего колеса, для которого количество фаз изменяется с изменением числа полюсов поля.
При этих условиях количество полюсов обмоток статора ничем не связано и выбирается любым в зависимости от условий работы двигателя. Регулирование при этом осуществляется скачкообразным изменением частоты вращения поля двигателя. Однако частоту вращения ротора нельзя изменить скачкообразно вследствие наличия инерции всей системы электропривода. Только после переключения наступает изменение частоты вращения ротора. Еще одним методом управления частотой вращения асинхронного двигателя является изменение частоты переменного тока, который питает двигатель.
U1 ? 4,44f?1kоб1Фв.
При этом условии активные материалы двигателя полностью используются. Значит, изменение частоты должно сопровождаться поддержанием вращающего момента постоянным, что осуществляется изменением напряжение на зажимах статора.
Структура обозначения электродвигателей
Расшифровка обозначения:
X1 – тип электродвигателя (асинхронный или синхронный):
А – асинхронный;
С – синхронный.
X2 – тип электродвигателя по степени взрывозащиты:
D – взрывонепроницаемая оболочка Exd;
P – оболочка под избыточным давлением Exp.
Примечание: двигатели общепромышленного исполнения не маркируются.
X3 – тип электродвигателя (вертикальный или горизонтальный):
V – вертикальный.
Примечание: горизонтальные двигатели не маркируются.
Х4 – высота оси вращения:
Указывается точное числовое значение высоты оси вращения ЭД в мм.
Примечание: для вертикальных ЭД высота оси вращения не указывается.
Х5 – тип охлаждения:
А – воздушное охлаждение замкнутого типа;
W – водяной тип охлаждения;
AW – воздушно-водяной тип охлаждения.
Примечание: воздушное охлаждение разомкнутого типа не маркируется.
X6 – номинальная мощность ЭД в кВт:
Указывается точное значение номинальной мощности ЭД в кВт.
Х7 – номинальное напряжение питания ЭД в кВ:
Указывается точное значение номинального напряжения питания ЭД в кВ.
Х8 – количество полюсов:
Указывается точное значение количества полюсов ЭД.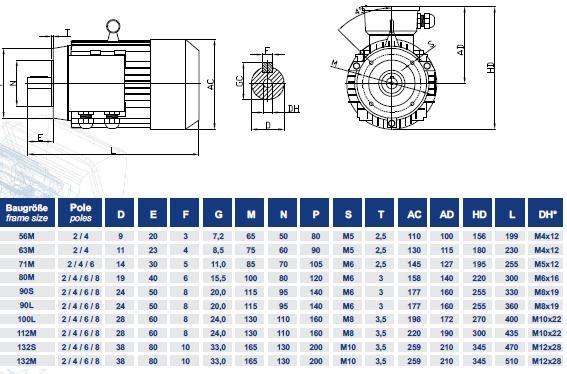
X9 – климатическое исполнение и категория размещения:
Указывается тип климатического исполнения и категория размещения по ГОСТ 15150.
Пример обозначения электродвигателя при заказе:
A630-1250/6-2-УХЛ4 – Асинхронный общепромышленный горизонтальный электродвигатель, с высотой оси вращение 630 мм, с воздушным охлаждением разомкнутого типа, мощностью 1250 кВт, напряжением 6 кВ, двухполюсный, климатического исполнения и категории размещения УХЛ4 по ГОСТ 15150.
AD560A-1250/10-2-УХЛ4 – Асинхронный взрывозащищенный (типа Exd) горизонтальный электродвигатель, с высотой оси вращения 560 мм ,с воздушным типом охлаждением, мощностью 1250 кВт, напряжением 10кВ, двухполюсный, климатического исполнения УХЛ4 по ГОСТ 15150.
AP680A-5000/10-2-УХЛ4 – Асинхронный взрывозащищенный (типа Exp) горизонтальный электродвигатель, с высотой оси вращения 680 мм, с воздушным охлаждением замкнутого типа, мощностью 5000 кВт, напряжением 10кВ, двухполюсный, климатического исполнения категории размещения УХЛ4 по ГОСТ 15150.
ADVA-800/6-6-УХЛ1 – Асинхронный взрывозащищенный (типа Exd) вертикальный электродвигатель, с воздушным охлаждением замкнутого типа, мощностью 800 кВт, напряжением 6кВ, шестиполюсный, климатического исполнения и категории размещения УХЛ1 по ГОСТ 15150.
С860-8000/10-2-УХЛ4 – Синхронный общепромышленный горизонтальный электродвигатель, с высотой оси вращения 860 мм, с воздушным охлаждением разомкнутого типа, мощностью 8000 кВт, напряжением 10кВ, двухполюсный, климатического исполнения и категории размещения УХЛ4 по ГОСТ 15150.
СP860AW-8000/10-2-УХЛ4 – Синхронный взрывозащищенный электродвигатель (тип Exp) горизонтальный, с высотой оси вращения 860 мм, с жидкостно-воздушным типом охлаждением, мощностью 8000 кВт, напряжением 10кВ, двухполюсный, климатического исполнения и категории размещения УХЛ4 по ГОСТ 15150.
Привод лифтов от двухскоростного короткозамкнутого асинхронного двигателя
Категория:
Монтаж и эксплуатация лифтов
Публикация:
Привод лифтов от двухскоростного короткозамкнутого асинхронного двигателя
Читать далее:
Привод лифтов от двухскоростного короткозамкнутого асинхронного двигателя
Отсюда следует, что номинальную скорость асинхронного двигателя можно регулировать путем изменения числа пар полюсов статора. Двигатели, в которых применяют такой способ изменения частоты вращения, называют двухскоростными, трехскоростными и т. д.
Двигатели, в которых применяют такой способ изменения частоты вращения, называют двухскоростными, трехскоростными и т. д.
В лифтах используют двухскоростные асинхронные короткозамкну-тые двигатели с двумя независимыми обмотками на статоре, каждая из которых имеет свое число пар полюсов.
Механические характеристики одного из таких двигателей показаны на рис. 56, а. Характеристика Б получается, когда к сети подключена статорная обмотка с малым количеством полюсов, а характеристика А — статорная обмотка с большим (на рис. 56, а — в четыре раза) числом пар полюсов. Номинальная частота вращения двигателя пБ больше номинальной частоты пА во столько раз, во сколько раз число пар полюсов одной обмотки меньше числа пар полюсов другой обмотки.
Рекламные предложения на основе ваших интересов:
Дополнительные материалы по теме:
В лифтах, где использован в качестве привода двухскоростиой асинхронный двигатель, скорость движения кабины больше, чем в лифтах с односко-ростными асинхронными двигателями.
Принципиальная схема электропривода лифта с двухскоростным асинхронным двигателем приведена на рис. 56, б. Двигателем управляют с помощью четырех контакторов. Контакторы В и Н служат для изменения направления вращения двигателя, а контакторы Б и М — для подключения к сети первой статорной обмотки, когда двигатель вращается с большой скоростью, или второй статорной обмотки, когда он вращается с малой скоростью. В рассматриваемой схеме использован двигатель с шестью парами полюсов на первой обмотке (выводы 6С1, 6С2, 6СЗ) и двадцатью четырьмя парами полюсов на второй обмотке (выводы 24С1, 24С2, 24СЗ).
Рис. 56. Двухскоростиой асинхронный двигатель: а — механические характеристики, б — схема электропривода лифта
Диаграмма скорости лифта с двухскоростным асинхронным двигателем при подъеме кабины с нижнего этажа до одного из верхних этажей показана на рис. 57 (см. также рис. 56).
Рис. 57. Диаграмма скорости лифта с двухскоростным двигателем
При подъеме пустой кабины ее замедление после переключения с обмотки большой скорости на малую меньше по сравнению с замедлением груженой кабины.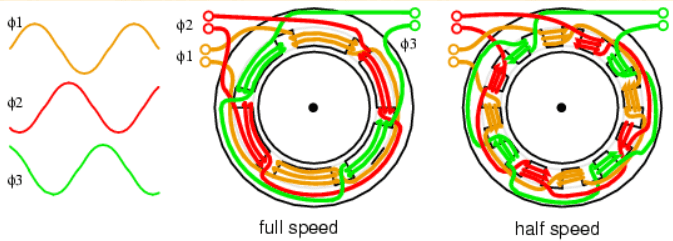 Поэтому пустая кабина достигает малой скорости позже (пунктир на рис. 57), чем кабина с грузом. Это обстоятельство всегда надо иметь в виду при определении места установки этажного переключателя, который переводит двигатель с большой скорости на малую.
Поэтому пустая кабина достигает малой скорости позже (пунктир на рис. 57), чем кабина с грузом. Это обстоятельство всегда надо иметь в виду при определении места установки этажного переключателя, который переводит двигатель с большой скорости на малую.
Для привода лифтов применяют двухскоростные асинхронные двигатели серий АС, АСМ и АСШ, большая частота вращения которых в четыре или три раза больше малой частоты вращения.
Электроприводом от двухскорост-ного асинхронного двигателя оборудуют пассажирские лифты со скоростью движения кабины до 1 м/с и грузовые лифты — до 0,5 м/с.
Рекламные предложения:
Читать далее: Привод лифтов от двигателей постоянного тока
Категория: – Монтаж и эксплуатация лифтов
Главная → Справочник → Статьи → Форум
Объяснение скорости двигателя
: погружение в двигатели переменного и постоянного тока
Скорость, крутящий момент, мощность и напряжение являются важными факторами при выборе двигателя. В этом блоге, состоящем из двух частей, мы углубимся в особенности скорости двигателя. В части 1 мы обсудим, как скорость различается между типами двигателей, а в части 2 мы рассмотрим, когда следует рассмотреть возможность добавления коробки передач в приложение.
В этом блоге, состоящем из двух частей, мы углубимся в особенности скорости двигателя. В части 1 мы обсудим, как скорость различается между типами двигателей, а в части 2 мы рассмотрим, когда следует рассмотреть возможность добавления коробки передач в приложение.
Скорость асинхронного двигателя переменного тока
Электродвигатели переменного тока уникальны тем, что созданы для работы на определенных скоростях независимо от их конструкции или производителя.Скорость двигателя переменного тока зависит от количества полюсов и частоты сети источника питания, а не от его напряжения. Обычные двигатели переменного тока состоят из двух или четырех полюсов. В полюсах статора создается магнитное поле, которое индуцирует результирующие магнитные поля в роторе, которые соответствуют частоте изменяющегося магнитного поля в статоре. Двухполюсные двигатели переменного тока, работающие с частотой 60 Гц, всегда будут работать со скоростью примерно 3600 об / мин, а четырехполюсные двигатели переменного тока будут иметь скорость около 1800 об / мин.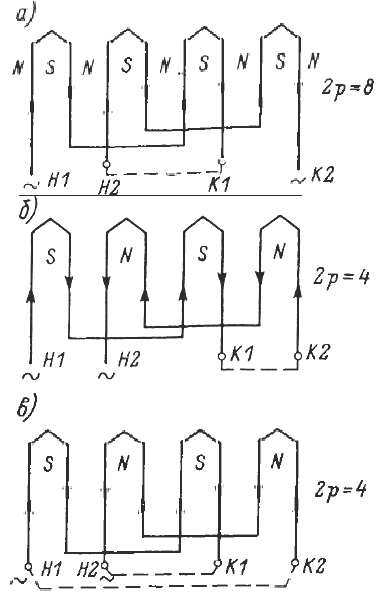
Скорость = 120 x частота (Гц) / число полюсов двигателя
Пример 120 x 60 Гц / 4 полюса = 1800 об / мин.
Имейте в виду, что скорость двигателя переменного тока не будет достигать этих точных значений – и будет немного ниже – потому что существует определенная величина скольжения, которая должна присутствовать для двигателя для создания крутящего момента. Ротор всегда будет вращаться медленнее, чем магнитное поле статора, и постоянно играет в догонялки. Это создает крутящий момент для запуска двигателя переменного тока.Разница между синхронными скоростями статора (3600 и 1800 об / мин) и фактической рабочей скоростью называется скольжением. (Дополнительные сведения о скольжении см. В нашем блоге «Синхронные и асинхронные двигатели: обнаружение различий».)
Элемент управления может использоваться для изменения скорости трехфазного двигателя переменного тока путем увеличения или уменьшения частоты, передаваемой на двигатель, в результате чего он ускоряется или замедляется. Кроме того, многие элементы управления переменного тока имеют однофазный вход, поэтому это позволяет запускать трехфазные двигатели на объектах, где отсутствует трехфазное питание.
Однако такая возможность изменять скорость не характерна для однофазных двигателей переменного тока. Эти двигатели подключаются непосредственно к стандартной розетке и работают с установленной доступной частотой. Исключением из этого практического правила будет потолочный вентилятор, работающий от однофазного двигателя переменного тока, но имеющий три различных настройки скорости.
Скорость двигателя постоянного токаХотя двигатели постоянного тока с постоянными магнитами также имеют полюса, эти полюса не влияют на скорость, как двигатели переменного тока, потому что есть несколько других факторов, влияющих на двигатели постоянного тока.Количество витков провода в якоре, рабочее напряжение двигателя и сила магнитов – все это влияет на скорость двигателя. Если двигатель постоянного тока работает от батареи 12 В, это максимальное напряжение, доступное для устройства, и двигатель сможет работать только на скорости, рассчитанной на 12 В. Если батарея разряжена и подает меньшее напряжение, скорость соответственно уменьшится.
Теперь, если вы подключите тот же двигатель 12 В постоянного тока к источнику питания 24 В постоянного тока, ваша скорость обычно удваивается. Имейте в виду, что работа двигателя с удвоенной скоростью при одной и той же точке нагрузки / крутящего момента приведет к тому, что двигатель будет работать тяжелее, что приведет к дополнительному нагреву, который со временем может вызвать преждевременный отказ двигателя.
Как и в случае трехфазных двигателей переменного тока и бесщеточных двигателей постоянного тока, средства управления могут использоваться с двигателями постоянного тока. Регуляторы постоянного тока регулируют скорость, изменяя напряжение, подаваемое на двигатель (это отличается от средств управления двигателем переменного тока, которые регулируют сетевую частоту двигателя).
Типичные скорости холостого хода или синхронные скорости для двигателя переменного тока с дробной мощностью 1800 или 3600 об / мин и от 1000 до 5000 об / мин для двигателей постоянного тока с дробной мощностью. Если приложение требует более низкой скорости и / или более высокого крутящего момента, следует рассмотреть вариант использования редукторного двигателя.Чтобы узнать больше о добавлении редуктора, ознакомьтесь с частью 2, «Объяснение скорости двигателя: когда использовать редуктор».
Количество полюсов – хорошее, плохое и уродливое
Количество полюсов (электродвигателя) стало моей любимой мозолью.
Многие новички ошибаются – привет мне еще в 2010 году или около того! Подробнее об этом чуть позже.
И даже больше людей по крайней мере несколько смущены этим. Хотя вы редко можете ошибиться, просто спросив тех, кто может знать больше (группа «Дизайн электродвигателей» на Facebook – отличное место для этого), вы также можете сначала прочитать этот пост.
Итак, давайте – Хорошее, Плохое и Уродливое увеличения числа полюсов.
Поляков. Они такие.Уродливые
Начнем с Уродливого.
Поляки НЕ ЯВЛЯЮТСЯ шестернями.
Это означает, что даже при наличии определенной обратной зависимости между числом полюсов и скоростью, нет соответствующего увеличения крутящего момента .
Другими словами, удвоение числа полюсов не (в общем) удвоить крутящий момент.Число полюсов не действует как передаточное отношение механической передачи. Это напрямую влияет на скорость, да (при фиксированной частоте питания), но влияние на крутящий момент гораздо больше тенистый и гибкий.
Способ, которым часто обучают и изучают моторы, может быть виноват в этой путанице. Основы базовой физики просматриваются либо учителем, либо учеником, или, что более вероятно, обоими.
Чтобы увековечить ошибку, во многих формулах крутящего момента в учебниках действительно есть число полюсов в качестве множителя.Однако они не показывают соответствующего подразделения, которое также спрятано где-то еще.
Например, предположим, что мы сохраняем фазовый ток и механическую скорость (и плотность потока в воздушном зазоре) одинаковыми и удваиваем количество полюсов. Поток на полюс уменьшается вдвое, но это немедленно компенсируется тем, что у нас их больше в серии. Поскольку каждый полюс теперь меньше, мы можем разместить только половину количества витков в каждый из них. Это означало бы снижение обратной ЭДС и мощности (и, следовательно, крутящего момента), если бы не тот факт, что электрическая частота теперь тоже выше, что снова компенсирует это **.
** Теперь я понимаю, что этот пример, возможно, слишком упрощен и / или вводит в заблуждение. Например, индуктивность статора пропорциональна количеству полюсов в квадрате . Это означает, что для двигателей, которые возбуждаются от статора, их способность создавать магнитный поток также ухудшается с увеличением числа полюсов. Это означает, что плотность потока в воздушном зазоре также может не остаться прежней, если не будут изменены и другие размеры.
Это очень хорошо видно в синхронном реактивном двигателе, где плотность потока в воздушном зазоре определяется только статором и статором.Удвойте количество полюсов, и плотность потока уменьшится вдвое, если вы не измените, например, плотность тока или геометрия другими способами.
Асинхронные двигатели – которые я, по совпадению, ненавижу по этой причине – более сложны. В IM, плотность потока в воздушном зазоре определяется комбинацией тока и статора и индуцированных токов ротора, противостоящих ему . (В эквивалентной схеме это видно как часть тока статора, выходящего через ветвь ротора и пропускающего ветвь намагничивания.Таким образом, увеличение числа полюсов IM означает, что большая часть тока статора тратится на возбуждение двигателя, а пропорционально меньше остается на связь ротора и создание крутящего момента.
Другими словами, мотор будет производить точно такой же крутящий момент независимо от количества полюсов, если все остальные размеры остались нетронутыми.
А теперь перейдем к собственно сравнению.
Хорошее
Длина конца обмотки
Чем больше полюсов, тем меньше длина конца обмотки * и, как следствие, снижаются потери в меди.
* Хотя почему это происходит, это довольно базовые знания, но вот версия для начинающих: подумайте о двухполюсной машине. Концевая обмотка – часть обмотки за пределами сердечника двигателя между двумя последовательными сторонами катушки – должна пересекать примерно половину периферии двигателя. Для четырехполюсных машин расстояние сокращается до одной четвертой, для шестиполюсных машин – до одной шестой и так далее.
Кроме того, уменьшенная длина EW также снижает общую мощность двигателя. длина. Это, очевидно, само по себе может быть неплохо.Или, в качестве альтернативы, длина сердечника может быть увеличена для получения большего крутящего момента. из того же космического конверта.
Увеличенный крутящий момент
Увеличение числа полюсов может увеличить допустимый крутящий момент при определенных условиях.
Это происходит благодаря уменьшенному потоку на полюс, что позволяет использовать более тонкий статор (или роторного) ярма. Это, в свою очередь, может привести к увеличению радиуса воздушного зазора. и / или более глубокие пазы, что приводит к увеличению крутящего момента.
Однако именно здесь вступают в силу вышеупомянутые условия.
Первая в общем, плотность потока в воздушном зазоре должна оставаться неизменной или, по крайней мере, не сильно упасть. В индукционных и реактивных машинах это может не быть кейс. Но об этом позже.
Аналогично, полный ток в каждый слот (NI) также должен оставаться примерно таким же или увеличиваться. Опять же, это может быть не всегда из-за повышенных потерь в стали (еще раз потом).
Увеличенный максимальный крутящий момент
Это подводит нас к следующему пункту. Увеличение числа полюсов также может позволить использовать гораздо более высокие электрические нагрузки (по существу, NI на шаг паза).
Помните, что крутящий момент пропорционален NI, умноженному на (полезную *) плотность потока в воздушном зазоре. Это не зависит от количества полюсов.
* Часть потока в воздушном зазоре синфазна с вращающейся волной плотности тока. Подумайте здесь о синусах и косинусах.
Однако зависит от от того, сколько «дополнительного» (не создающего крутящего момента) поля воздушного зазора создается током. Действительно, доля поля воздушного зазора, создаваемого статором, по сути, представляет собой общий ток в одном полюсе, деленный на удвоенную длину воздушного зазора.
Итак, перенасыщение статор и сердечник ротора могут стать ограничивающим фактором перед тепловым или другие аспекты, особенно когда учитывается максимальный крутящий момент. В этом отношении может помочь увеличение числа полюсов (хотя это не помощь с другими проблемами, связанными с пиковыми нагрузками, такими как утечки потоки или силы намотки). Удвойте количество полюсов, и вы уменьшите вдвое способность обмотки статора создавать магнитный поток.
Это подводит нас к следующему пункту.
Плохой
Намагничивание
Предыдущий пункт применяется, когда перенасыщение статора является проблемой на уровнях пикового крутящего момента. Однако в асинхронных и реактивных двигателях весь поток в воздушном зазоре создается обмоткой статора.
И просто несколько минут назад мы узнали, что чем больше число полюсов, тем хуже статор работает при намагничивании. По этой причине вы редко видите асинхронные двигатели с числом полюсов более 8 и реактивные машины повезло достичь 6.
Потери переменного тока или скорость
Как обсуждалось ранее, увеличение числа полюсов снижает синхронную скорость двигателя. Это означает, что если мы хотим поддерживать скорость, необходимо увеличить частоту питания.
Это увеличит потери в стали и потери переменного тока в обмотке. Более того, даже конструкция инвертора может стать проблематичной, если мы перейдем к очень большим числам.
С другой стороны, если мы уменьшив скорость вращения ротора, мы вполне можем потерять часть мощности.Как мы усвоили, увеличение полюсов может помочь увеличить крутящий момент, но это может быть недостаточно для компенсации * снижения скорости.
* мощность равна крутящему моменту, умноженному на скорость, помните
Межполюсная утечка
Сложный материал, означающий, что часть магнитного потока ротора уходит с одного полюса на другой, вообще не связывая обмотку статора.
Обычно он находится в диапазоне от «незначительно» до «неудобства», но также не позволяет предотвращать работу абсурдно большого числа полюсов.
Производство
Как правило, более высокое число полюсов затрудняет производство.
Это это скорее тенденция, чем жесткое правило: например, концентрированное обмотку для 10-полюсного двигателя сделать проще, чем распределенную обмотка на 2-х полюсную. Но даже тогда 40-полюсная сосредоточенная обмотка немного сложнее, чем пример с 10 полюсами несколько секунд назад.
Заключение
- Полюса не шестерни. Да, более высокое значение снижает синхронную скорость, но это не сопровождается автоматически соответствующим увеличением крутящего момента.
- Тем не менее, большее количество полюсов может увеличить допустимый крутящий момент. Это особенно актуально для машин PM.
- Двигатели, возбуждаемые от статора, обычно не работают со слишком большим количеством полюсов.
Ознакомьтесь с набором инструментов EMDtool – Electric Motor Design для Matlab .
Нужна помощь с разработкой электродвигателя или программным обеспечением для проектирования? Свяжитесь с нами – удовлетворение гарантировано!
Зависимость скорости вращения вала двигателя от частоты и количества полюсов
AutoQuiz редактирует Джоэл Дон, менеджер сообщества ISA по социальным сетям.
Этот вопрос викторины по автоматизации исходит из программы сертификации ISA Certified Automation Professional (CAP). Сертификация ISA CAP обеспечивает непредвзятую, стороннюю, объективную оценку и подтверждение навыков профессионала в области автоматизации. Экзамен CAP ориентирован на направление, определение, проектирование, разработку / применение, развертывание, документацию и поддержку систем, программного обеспечения и оборудования, используемых в системах управления, производственных информационных системах, системной интеграции и операционном консультировании.Щелкните эту ссылку для получения дополнительной информации о программе CAP.
Какое из следующих утверждений правильно определяет взаимосвязь между скоростью вала двигателя переменного тока с короткозамкнутым ротором, частотой потребляемой мощности и количеством полюсов, на которые заводится двигатель, при незначительном скольжении?
a) частота вращения вала прямо пропорциональна количеству полюсов и не зависит от частоты двигателя
b) частота вращения вала прямо пропорциональна частоте и не зависит от числа полюсов
c) частота вращения вала равна прямо пропорциональна частоте и обратно пропорциональна количеству полюсов
d) скорость вала обратно пропорциональна частоте и прямо пропорциональна количеству полюсов
e) ничего из вышеперечисленного
Правильный ответ: C , частота вращения вала прямо пропорциональна частоте и обратно пропорциональна количеству полюсов.Скорость вала связана с частотой и количеством полюсов следующим уравнением: N = [(120 x F) / P] – Slip
где,
N = частота вращения вала (об / мин)
F = частота источника питания (Гц)
P = количество полюсов статора (пары полюсов)
При отсутствии «скольжения», если частота источника питания увеличивается (при условии, что количество полюсов остается неизменным), скорость вала увеличивается (прямо пропорционально). Для одного и того же двигателя при увеличении количества полюсов статора (при постоянной частоте источника питания) скорость вала будет уменьшаться (обратно пропорционально).
Ссылка : Дэйв Полька, Motors and Drives: A Practical Technology Guide, Second Edition .
О редакторе
Джоэл Дон – менеджер сообщества ISA и независимый консультант по контент-маркетингу, социальным сетям и связям с общественностью. До своей работы в области маркетинга и PR Джоэл работал редактором региональных газет и национальных журналов по всей территории США. Он получил степень магистра в школе Медилл Северо-Западного университета со специализацией в области науки, техники и биомедицинских маркетинговых коммуникаций, а также степень бакалавра. Имеет ученую степень Калифорнийского университета в Сан-Диего.
Связаться с Джоэлем
Вопрос: Как определить количество полюсов двигателя Ebike
4-полюсный двигатель выполняет только половину цикла за каждый цикл источника. Двухполюсный двигатель показывает конфигурацию север-юг. 4-полюсный двигатель показывает конфигурацию север-юг-север-юг. 2-полюсный двигатель имеет высокую скорость из-за меньшего количества полюсов.
Как определить, является ли двигатель 2-полюсным или 4-полюсным?
4-полюсный двигатель выполняет только половину цикла за каждый цикл источника.Двухполюсный двигатель показывает конфигурацию север-юг. 4-полюсный двигатель показывает конфигурацию север-юг-север-юг. 2-полюсный двигатель имеет высокую скорость из-за меньшего количества полюсов.
Как узнать, сколько полюсов у электродвигателя?
Чтобы определить количество полюсов, вы можете напрямую прочитать паспортную табличку или рассчитать его по оборотам, указанным на паспортной табличке, или вы можете посчитать катушки и разделить их на 3 (количество полюсов на фазу) или на 6 (пары полюсов на каждую фазу). фаза).
Какой мотор Kv быстрее?
Ну, это связано с мощностью двигателя.Kv описывает число оборотов в минуту (оборотов в минуту) двигателя на вложенный в него вольт. Вообще говоря, чем больше у мотора Kv, тем больше оборотов и больше мощность. Например, двигатель на 9000 кВ будет быстрее, чем двигатель на 2200 кВ.
Сколько полюсов у моего бесщеточного двигателя?
Обычно моторы с рабочими колесами имеют 2 или 4 магнитных полюса. Есть и моторы с шестью полюсами. Двигатели Outrunner могут иметь более 6 магнитных полюсов.
Что такое 120 в формуле скорости двигателя?
Частота синхронной машины в циклах в секунду или в герцах такая же, как скорость ротора в оборотах в секунду.Следовательно, частота волны напряжения f = p ÷ 2 x n ÷ 60, здесь n = механическая скорость в об / мин, p = общее количество полюсов, таким образом, p ÷ 2 = пары полюсов и 120 = 60 × 2 в приведенной выше формуле.
Что такое 4-полюсный двигатель RC?
4-полюсный двигатель имеет 4 электромагнита; 2 северных и 2 южных. По сути, двухполюсный двигатель – это хороший двигатель с числом оборотов в минуту, в то время как четырехполюсный двигатель с большим количеством магнитов будет иметь больший крутящий момент. Вы можете немного потерять эффективность при использовании 4-х полюсов вместо 2-х полюсов, но если вы бегаете только 5/6-минутные гонки, это должно быть нормально.
В чем разница между 4-полюсным и 6-полюсным двигателем?
Например, 6-полюсный двигатель может обеспечивать больший крутящий момент и более быстрое ускорение, тогда как 4-полюсный электродвигатель может обеспечивать более высокую максимальную скорость, и все эти переменные неизвестны без дино и без исчерпания всех механических / электронных параметров настройки для поиска оптимального пика. кривая мощности для каждого двигателя при одинаковой нагрузке.
Какая частота вращения у 6-полюсного двигателя?
Шестиполюсные двигатели работают со скоростью 1200 об / мин без нагрузки (7200 · 6) и от 1050 до 1175 об / мин под нагрузкой.
Что означают 2 полюса и 4 полюса?
По сравнению с 2 полюсами равной мощности, 4 полюса дают ½ об / мин и 2-кратный крутящий момент. Таким образом, 4-полюсный двигатель будет лучше, когда важен крутящий момент, часто при запуске.
Как узнать число оборотов электродвигателя?
Как рассчитать число оборотов двигателя. Чтобы рассчитать частоту вращения асинхронного двигателя переменного тока, нужно умножить частоту в герцах (Гц) на 60 – количество секунд в минуте – на два для отрицательного и положительного импульсов в цикле.Затем вы делите на количество полюсов, которое имеет двигатель: (Гц x 60 x 2) / количество полюсов = частота вращения холостого хода.
Сколько катушек у 6-полюсного двигателя?
Для шестиполюсной обмотки все восемь катушек соединены последовательно.
Какова формула синхронной скорости?
Синхронная скорость может быть рассчитана следующим образом: 120-кратная частота (F), деленная на количество полюсов (P): синхронная скорость уменьшается с увеличением количества полюсов. В таблице ниже показана синхронная скорость, связанная с различным количеством полюсов при частотах питания 50 Гц и 60 Гц: Нет.
Что такое 8-полюсный двигатель?
Синхронная скорость 8-полюсного станка составляет 750 об / мин. По мере увеличения числа полюсов ток намагничивания двигателя увеличивается, и двигатель может обеспечивать более высокий пусковой момент, а также рабочий крутящий момент. Двигатель с более низкой скоростью подходит для движения с высокими инерционными нагрузками, такими как краны, лифты и т. Д.
Есть ли трехфазный двигатель постоянного тока?
Бесщеточный двигатель постоянного тока действительно может быть трехфазным. На самом деле 3-х фазный – самый распространенный. Это относится к количеству обмоток электрических фаз на двигателе.Он переключается через трехфазный силовой «мост» от источника постоянного напряжения.
Какая частота вращения у 4-полюсного двигателя?
Двухполюсные двигатели переменного тока, работающие с частотой 60 Гц, всегда будут работать со скоростью приблизительно 3600 об / мин, а четырехполюсные двигатели переменного тока будут иметь скорость около 1800 об / мин. Пример 120 x 60 Гц / 4 полюса = 1800 об / мин.
Что такое количество полюсов двигателя?
Проще говоря, полюс – это северное или южное магнитное поле, которое создается постоянным магнитом или током, проходящим через катушку с проволокой.Шаговые двигатели с постоянными магнитами – самые простые. Производители определяют количество полюсов по количеству пар полюсов или обмоток статора.
Что такое 6-полюсный двигатель?
6 полюсов = 1000 об / мин (~ 970 об / мин) 8 полюсов = 750 об / мин (~ 720 об / мин) Для трехфазного источника питания 60 Гц: 2 полюса = 3600 об / мин (на паспортной табличке указано около 3500 об / мин) 4 полюса = 1800 об / мин (~ 1,740 об / мин)
Что такое асинхронная скорость?
Синхронный двигатель – это машина, скорость ротора которой равна скорости магнитного поля статора.Асинхронный двигатель – это машина, ротор которой вращается со скоростью меньше синхронной.
В чем разница между синхронной скоростью и скоростью ротора?
Асинхронный двигатель с короткозамкнутым ротором имеет две разные скорости. Синхронная скорость относится к вращающемуся магнитному полю статора, которое зависит от количества полюсов и частоты. Другая скорость – это скорость ротора. Скорость ротора всегда будет ниже скорости статора, мы называем это скольжением.
Насколько быстро работают бесщеточные двигатели?
Преимущества бесщеточных двигателей: Он может работать на высоких скоростях до 100 000 об / мин, а не с щеточными двигателями с высокими оборотами 20 000 об / мин.Его срок службы составляет около 10 000 часов.
Как рассчитываются полюса?
Полюса = количество полюсов вашего двигателя. Так, например, если у вас 4-полюсный двигатель на 60 Гц, то частота вращения = 60 * (2/4) * 60 = 1800 об / мин.
.
AKD – Как определить количество полюсов двигателя
При настройке неизвестного двигателя может потребоваться определить количество полюсов двигателя, если оно не указано.
Этот анализ можно легко выполнить в AKD Workbench.
Необходимо выполнить следующие шаги:
- Отключить привод: DRV.DIS
- Установить привод в сервисный режим и режим крутящего момента: DRV.CMDSOURCE 0 и DRV.OPMODE 0
- Установите полюса двигателя на ноль и фазу двигателя на ноль: ПОЛЮСЫ ДВИГАТЕЛЯ 0 и ФАЗА ДВИГАТЕЛЯ 0
- Разблокировать привод: DRV.EN
- Приложите крутящий момент к двигателю: IL.CMDU X -> X необходимо установить в зависимости от вашего двигателя
- Затем увеличивайте фазу двигателя с шагом 30 градусов и после каждого шага считывайте фактическое положение:
- ДВИГАТЕЛЬ.ФАЗА 0 и PL.FB
- ДВИГАТЕЛЬ.ФАЗА 30 и PL.FB
- ДВИГАТЕЛЬ.ФАЗА 60 и PL.FB
- ДВИГАТЕЛЬ.ФАЗА 90 и PL.FB …… ..
- … ..
- ДВИГАТЕЛЬ.ФАЗА 359 и PL.FB
- ДВИГАТЕЛЬ.ФАЗА 30 и ПЛ.FB 4455
- Снова отключите привод и сбросьте фазу двигателя: DRV.DIS и MOTOR.ФАЗА 0
Из-за того, что вы увеличили фазу двигателя на 30 градусов, ваш двигатель обеспечил один электрический оборот -> движение вокруг одной пары полюсов.
Это означает, что при измерении дельты положения первых 30 градусов и последних 30 градусов будет показано перемещение на один оборот.
На основе этой информации теперь можно рассчитать количество полюсов двигателя. Ваша основная информация отображается на экране устройства, где вы можете получить изменение положения за один оборот вашего устройства обратной связи.(например, UNIT.PROTARY 4 -> это означает, что вы получаете 16 бит на оборот)
Теперь вам просто нужно разделить информацию о положении, которую вы ожидаете для одного оборота вашего устройства обратной связи, на дельту положения, и, таким образом, вы получите количество пар полюсов двигателя для вашего двигателя.
Пример:
ДРВ.ДИС
DRV.CMDSOURCE 0
DRV .OPMODE 0
ДВИГАТЕЛЬ .ПОЛЮСА 0
ДВИГАТЕЛЬ .ФАЗА 0
DRV.EN
IL.CMDU 1 необходимо выбрать в зависимости от вашего двигателя
.ДВИГАТЕЛЬ.ФАЗА 0
PL.FB
0
МОТОР.ФАЗА 30
PL.FB
910,225
ДВИГАТЕЛЬ.ФАЗА 60
PL.FB
1820 445
ДВИГАТЕЛЬ.ФАЗА 90
PL.FB
2730,67
…… ..
МОТОР.ФАЗА 359
PL.FB
10922,67
МОТОР.ФАЗА 30
PL.FB
11832,895
Расчет дельты позиции:
- PL.FB [30 (2. Измерение)] – PL.FB [30 (1. Измерение)] = 11832,895 – 910,225 = 10922,67
Экран устройства показывает, что вы получаете 16-битное значение на оборот вашего устройства обратной связи:
Расчет пар полюсов двигателя
- Пары полюсов двигателя = [16 бит] / 10922,67 = 65536 / 10922,67 = 6
- ДВИГАТЕЛЬ.ПОЛЮСА = 12
Если настройка полюсов двигателя завершена, может потребоваться определить угол коммутации, выполнив пробуждение и встряхивание.
12 Разница между двухполюсными двигателями и четырехполюсными двигателями
Электродвигатель – это электрическая машина, преобразующая электрическая энергия в механическую энергию. Большинство электродвигателей работают через взаимодействие между магнитным полем двигателя и электрическим током в обмотка проволоки для создания силы в виде вращения вала. Электродвигатели можно классифицировать по такие соображения, как тип источника питания, внутренняя конструкция, применение и тип вывода движения.
Число полюсов – это фактор, определяющий синхронная скорость асинхронного двигателя. 4-полюсный двигатель в 4 магнитных полюсов на роторе и количество связанных электромагнитных обмоток (схемы).
4-полюсный двигатель имеет крутящий момент примерно 3,0 фунт-сила-футов на каждую лошадиную силу. тогда как двухполюсный двигатель имеет крутящий момент 1,5 фунт-сила-футов. При 60 Гц 4-полюсный двигатель около 1800 об / мин, где 2-полюсный двигатель – 3600 об / мин. Таким образом, 4-полюсный двигатель обеспечивает более высокий КПД и больший крутящий момент на единицу объема и веса.
Двухполюсные двигатели
Двухполюсный двигатель – это двигатель с двумя магнитными полюсами. или пара магнитных полюсов с конфигурацией север-юг. 2-полюсный двигатель потребляет меньше энергии, имеет больше оборотов в минуту, хорошие шумовые характеристики и меньшая производительность труда. Этот тип двигателя неэффективен для большой мощности. Приложения.
Что вам нужно Знайте о двухполюсном двигателе
- 2-полюсный двигатель – это двигатель, имеющий два магнитные полюса или пара магнитных полюсов.
- Ротор двухполюсного двигателя совершает один цикл для каждого цикла источника.
- Двухполюсный двигатель показывает направление север-юг. конфигурация.
- 2-полюсный двигатель имеет высокую скорость из-за меньшего количества полюсов.
- 2-полюсный двигатель требует меньше времени на тренировку по сравнению с двухполюсным двигателем. 4-х полюсный двигатель.
- 2-полюсный двигатель имеет хорошие шумовые характеристики.
- 2-полюсный двигатель цилиндрической формы.
- Двухполюсный двигатель имеет большее количество оборотов в минуту.
- Коробка передач ниже 3000 об / мин всегда требуется для 2 полюсный двигатель.
- Двухполюсный двигатель имеет более высокое значение NPSHR.
- Двухполюсный двигатель не подходит для большой мощности.
- 2-полюсный двигатель более эффективен.
4-полюсные двигатели
4-полюсный двигатель – это двигатель с 4 или двумя магнитными полюсами. пары магнитных полюсов с конфигурацией север-юг-север-юг. 4 полюса двигатель потребляет больше энергии, имеет меньше оборотов в минуту и выдает больше крутящий момент на лошадиную силу и мощность работы. Этот тип двигателя подходит для приложений большой мощности.
Что нужно знать о 4-полюсном двигателе
- 4-полюсный двигатель – это двигатель с 4-мя магнитными полюса или две пары магнитных полюсов.
- 4-полюсный двигатель выполняет только половину цикла для каждый цикл источника.
- 4-х полюсный мотор-шоу север-юг-север-юг конфигурация.
- 4-полюсный двигатель имеет низкую скорость из-за большего числа полюсов.
- 4-полюсный двигатель имеет двойную рабочую мощность, чем у 2-х полюсный двигатель.
- 4-полюсный двигатель не обладает хорошими шумовыми характеристиками.
- 4-полюсный двигатель не цилиндрический.
- У 4-полюсного двигателя меньше оборотов в минуту.
- Как правило, коробка передач не требуется. полюсный двигатель.
- 4-полюсный двигатель имеет низкое значение NPSHR.
- 4-х полюсный двигатель подходит для большой мощности.
- 4-полюсный двигатель менее эффективен.
Также читайте: Разница между шаговым двигателем и серводвигателем
Разница Между двухполюсными двигателями и четырехполюсными двигателями в табличной форме
| ОСНОВА СРАВНЕНИЯ | 2-ПОЛЮСНЫЙ ДВИГАТЕЛЬ | 4-ПОЛЮСНЫЙ ДВИГАТЕЛЬ |
| Описание | 2-полюсный двигатель – это тип двигателя, который имеет два магнитных полюса или пару магнитного полюса. | 4-полюсный двигатель – это двигатель с 4 магнитными полюсами или двумя парами магнитных полюсов. магнитные полюса. |
| Количество циклов для каждого Цикл ресурса | Ротор двухполюсного двигателя совершает один цикл за каждый цикл источник. | 4-полюсный двигатель выполняет только половину цикла за каждый цикл источник. |
| Конфигурация | Двухполюсный двигатель показывает конфигурацию север-юг. | 4-полюсный двигатель показывает конфигурацию север-юг-север-юг. |
| Скорость | 2-полюсный двигатель имеет высокую скорость из-за меньшего количества полюсов. | 4-полюсный двигатель имеет низкую скорость из-за большего количества полюсов. |
| Производительность | 2-полюсный двигатель требует меньше усилий по сравнению с 4-полюсным двигателем. | 4-полюсный двигатель имеет двойную рабочую мощность, чем 2-полюсный двигатель. |
| Уровень шума | 2-полюсный двигатель имеет хорошие шумовые характеристики. | 4-полюсный двигатель не обладает хорошими шумовыми характеристиками. |
| Форма | Двухполюсный двигатель имеет цилиндрическую форму. | 4-полюсный двигатель не цилиндрический. |
| об / мин | У 2-полюсного двигателя больше оборотов в минуту. | У 4-полюсного двигателя меньше оборотов в минуту. |
| Коробка передач | Для 2-полюсного двигателя всегда требуется редуктор со скоростью ниже 3000 об / мин. | Как правило, в 4-полюсном двигателе нет необходимости в редукторе. |
| НПШР | Двухполюсный двигатель имеет более высокое значение NPSHR. | 4-полюсный двигатель имеет низкое значение NPSHR. |
| Пригодность | Двухполюсный двигатель не подходит для большой мощности. | 4-полюсный двигатель подходит для большой мощности. |
| КПД | 2-полюсный двигатель более эффективен. | 4-полюсный двигатель менее эффективен. |
Конструкция асинхронного двигателя
Стационарная часть асинхронного двигателя называется статор, а вращающийся элемент называется ротором.Вместо выступающих полюсов в статоре, как показано на А на рисунке 10-292 используются распределенные обмотки; эти обмотки размещаются в пазах по периферии статора. Обычно невозможно определить количество полюсов асинхронного двигателя при визуальном осмотре, но информацию можно получить на заводской табличке мотор. На паспортной табличке обычно указано количество полюсов и скорость, на которую рассчитан двигатель бег. Эта номинальная или несинхронная скорость немного ниже меньше синхронной скорости.Чтобы определить количество полюсов на фазу двигателя, разделите 120 умножить частоту на номинальную скорость. Написано как уравнение, это:
P = 120 f / N
Где: P – количество полюсов на фазу,
f – частота в cps,
N – номинальная скорость в об / мин, а
120 – постоянная величина.
Результат будет почти равен количеству полюсов на фазу. Например, рассмотрим цикл 60, трехфазный двигатель с номинальной частотой вращения 1750 об / мин.В данном случае:
P = 120 60 / 1,750 = 7,200 / 1,750 = 4,1
Следовательно, у двигателя четыре полюса на фазу. Если количество полюсов на фазу указано на паспортной табличке, синхронную скорость можно определить, разделив В 120 раз больше частоты на количество полюсов на фаза. В приведенном выше примере синхронный скорость равна 7200, разделенным на 4, или 1800 об / мин.
Ротор асинхронного двигателя состоит из утюга. сердечник с продольными пазами по окружности в которые заделаны тяжелые медные или алюминиевые стержни.Эти стержни приварены к тяжелому кольцу высокого проводимость на обоих концах. Композитная структура иногда называют беличьей клеткой, а двигатели, содержащие такой ротор называется индукционным с короткозамкнутым ротором. моторы. [Рисунок 10-293]
Скольжение асинхронного двигателя
Когда ротор асинхронного двигателя подвергается вращающееся магнитное поле, создаваемое статором обмоток в продольных стержнях наводится напряжение.Индуцированное напряжение заставляет ток течь через стержни. Этот ток, в свою очередь, производит собственное магнитное поле. поле, которое сочетается с вращающимся полем, поэтому что ротор принимает положение, в котором индуцированный напряжение сведено к минимуму. В результате ротор вращается на почти синхронная скорость поля статора, разница в скорости как раз достаточная чтобы вызвать нужное количество тока в роторе для преодоления механических и электрических потерь в ротор.Если бы ротор вращался с той же скоростью как вращающееся поле, проводники ротора не быть разрезанным любыми магнитными силовыми линиями, ЭДС не будет в них не мог быть наведен ток, и там не было бы крутящего момента.
