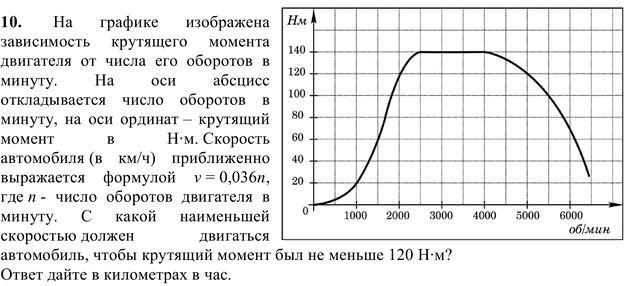
Как рассчитать крутящий момент электродвигателя
Крутящий момент электродвигателя – это сила вращения его вала. Именно момент вращения определяет мощность Вашего двигателя. Измеряется в ньютонах на метр или в килограмм-силах на метр.
Виды крутящих моментов:
- Номинальный – значение момента при стандартном режиме работы и стандартной номинальной нагрузке на двигатель.
- Пусковой – это табличное значение. Сила вращения, которую в состоянии развивать электродвигатель при пуске. При подборе эл двигателя убедитесь, что данный параметр выше, чем статический момент Вашего оборудования – насоса, либо вентилятора и т.д. В противном случае электродвигатель не сможет запуститься, что чревато перегревом и перегоранием обмотки.
- Максимальный – предельное значение, по достижении которого нагрузка уравновесит двигатель и остановит его.
Таблица крутящих моментов электродвигателей
В данной таблице собраны крутящие моменты наиболее распространенных в Украине электродвигателей АИР, а также требуемый при пуске – пусковой, максимально допустимый для данного типа электродвигателя – максимальный крутящий момент и момент инерции двигателей АИР (усилие важное при подборе электромагнитного тормоза, например)
| Двигатель | кВт/об | Мном, Нм | Мпуск, Нм | Ммакс, Нм | Минн, Нм |
| АИР56А2 | 0,18/2730 | 0,630 | 1,385 | 1,385 | 1,133 |
| АИР56В2 | 0,25/2700 | 0,884 | 1,945 | 1,945 | 1,592 |
| АИР56А4 | 0,12/1350 | 0,849 | 1,868 | 1,868 | 1,528 |
| АИР56В4 | 0,18/1350 | 1,273 | 2,801 | 2,801 | 2,292 |
| АИР63А2 | 0,37/2730 | 1,294 | 2,848 | 2,848 | 2,330 |
| АИР63В2 | 0,55/2730 | 1,924 | 4,233 | 4,233 | 3,463 |
| АИР63А4 | 0,25/1320 | 1,809 | 3,979 | 3,979 | 3,256 |
| АИР63В4 | 0,37/1320 | 2,677 | 5,889 | 5,889 | 4,818 |
| АИР63А6 | 0,18/860 | 1,999 | 4,397 | 4,397 | 3,198 |
| АИР63В6 | 0,25/860 | 2,776 | 6,108 | 6,108 | 4,442 |
| АИР71А2 | 0,75/2820 | 2,540 | 6,604 | 6,858 | 4,064 |
| АИР71В2 | 1,1/2800 | 3,752 | 8,254 | 9,004 | 6,003 |
| АИР71А4 | 0,55/1360 | 3,862 | 8,883 | 9,269 | 6,952 |
| АИР71В4 | 0,75/1350 | 5,306 | 13,264 | 13,794 | 12,733 |
| АИР71А6 | 0,37/900 | 3,926 | 8,245 | 8,637 | 6,282 |
| АИР71В6 | 0,55/920 | 5,709 | 10,848 | 12,560 | 9,135 |
| АИР71В8 | 0,25/680 | 3,511 | 5,618 | 6,671 | 4,915 |
| АИР80А2 | 1,5/2880 | 4,974 | 10,943 | 12,932 | 8,953 |
| АИР80В2 | 2,2/2860 | 7,346 | 15,427 | 19,100 | 13,223 |
| АИР80А4 | 1,1/1420 | 7,398 | 16,275 | 17,755 | 12,576 |
| АИР80В4 | 1,5/1410 | 10,160 | 22,351 | 24,383 | 17,271 |
| АИР80А6 | 0,75/920 | 7,785 | 16,349 | 17,128 | 12,457 |
| АИР80В6 | 1,1/920 | 11,418 | 25,121 | 26,263 | 20,553 |
| АИР80А8 | 0,37/680 | 5,196 | 10,393 | 11,952 | 7,275 |
| АИР80В8 | 0,55/680 | 7,724 | 15,449 | 16,221 | 10,814 |
| АИР90L2 | 3/2860 | 10,017 | 23,040 | 26,045 | 17,030 |
| АИР90L4 | 2,2/1430 | 14,692 | 29,385 | 29,385 | |
| АИР90L6 | 1,5/940 | 15,239 | 30,479 | 35,051 | 28,955 |
| АИР90LА8 | 0,75/700 | 10,232 | 15,348 | 20,464 | 15,348 |
| АИР90LВ8 | 1,1/710 | 14,796 | 22,194 | 32,551 | 22,194 |
| АИР100S2 | 4/2850 | 13,404 | 26,807 | 32,168 | 21,446 |
| АИР100L2 | 5,5/2850 | 18,430 | 38,703 | 44,232 | 29,488 |
| АИР100S4 | 3/1410 | 20,319 | 40,638 | 44,702 | 32,511 |
| АИР100L4 | 4/1410 | 27,092 | 56,894 | 65,021 | 43,348 |
| АИР100L6 | 2,2/940 | 22,351 | 42,467 | 49,172 | 35,762 |
| АИР100L8 | 1,5/710 | 20,176 | 32,282 | 40,352 | 30,264 |
| АИР112М2 | 7,5/2900 | 24,698 | 49,397 | 54,336 | 39,517 |
| АИР112М4 | 5,5/1430 | 36,731 | 73,462 | 91,827 | 58,769 |
| АИР112МА6 | 3/950 | 30,158 | 60,316 | 66,347 | 48,253 |
| АИР112МВ6 | 4/950 | 40,211 | 80,421 | 88,463 | 64,337 |
| АИР112МА8 | 2,2/700 | 30,014 | 54,026 | 66,031 | 42,020 |
| АИР112МВ8 | 3/700 | 40,929 | 73,671 | 90,043 | 57,300 |
| АИР132М2 | 11/2910 | 36,100 | 57,759 | 79,419 | 43,320 |
| АИР132S4 | 7,5/1440 | 49,740 | 99,479 | 124,349 | 79,583 |
| АИР132М4 | 11/1450 | 72,448 | 173,876 | 210,100 | 159,386 |
| АИР132S6 | 5,5/960 | 54,714 | 109,427 | 120,370 | 87,542 |
| АИР132М6 | 7,5/950 | 75,395 | 150,789 | 165,868 | 120,632 |
| АИР132S8 | 4/700 | 54,571 | 98,229 | 120,057 | 76,400 |
| АИР132М8 | 5,5/700 | 75,036 | 135,064 | 165,079 | 105,050 |
| АИР160S2 | 15/2940 | 48,724 | 97,449 | 155,918 | 2,046 |
| АИР160М2 | 18,5/2940 | 60,094 | 120,187 | 192,299 | 2,884 |
| АИР180S2 | 22/2940 | 71,463 | 150,071 | 250,119 | 4,288 |
| АИР180М2 | 30/2940 | 97,449 | 214,388 | 341,071 | 6,821 |
| АИР200М2 | 37/2950 | 119,780 | 275,493 | 383,295 | 16,769 |
| АИР200L2 | 45/2940 | 146,173 | 380,051 | 584,694 | 19,003 |
| АИР225М2 | 55/2955 | 177,750 | 408,824 | 710,998 | 35,550 |
| АИР250S2 | 75/2965 | 241,568 | 628,078 | 966,273 | 84,549 |
| АИР250М2 | 90/2960 | 290,372 | 784,003 | 1161,486 | 116,149 |
| АИР280S2 | 110/2960 | 354,899 | 887,247 | 1171,166 | 212,939 |
| АИР280М2 | 132/2964 | 425,304 | 1233,381 | 1488,563 | 297,713 |
| АИР315S2 | 160/2977 | 513,268 | 1231,844 | 1693,786 | 590,259 |
| АИР315М2 | 200/2978 | 641,370 | 1603,425 | 2116,521 | 962,055 |
| АИР355SMA2 | 250/2980 | 801,174 | 1281,879 | 2403,523 | 2163,171 |
| АИР160S4 | 15/1460 | 98,116 | 186,421 | 284,538 | 7,457 |
| АИР160М4 | 18,5/1460 | 121,010 | 229,920 | 350,930 | 11,375 |
| АИР180S4 | 22/1460 | 143,904 | 302,199 | 402,932 | 15,110 |
| АИР180М2 | 30/1460 | 196,233 | 470,959 | 588,699 | 27,276 |
| АИР200М4 | 37/1460 | 242,021 | 532,445 | 847,072 | 46,952 |
| АИР200L4 | 45/1460 | 294,349 | 647,568 | 941,918 | 66,229 |
| АИР225М4 | 55/1475 | 356,102 | 997,085 | 1317,576 | 145,289 |
| АИР250S4 | 75/1470 | 487,245 | 1218,112 | 1559,184 | 301,605 |
| АИР250М4 | 90/1470 | 584,694 | 1461,735 | 1871,020 | 467,755 |
| АИР280S4 | 110/1470 | 714,626 | 2072,415 | 2429,728 | 578,847 |
| АИР280М4 | 132/1485 | 848,889 | 1697,778 | 2886,222 | 1612,889 |
| АИР315S4 | 160/1487 | 1027,572 | 2568,931 | 3802,017 | 2363,416 |
| АИР315М4 | 200/1484 | 1287,062 | 3217,655 | 4247,305 | 3603,774 |
| АИР355SMA4 | 250/1488 | 1604,503 | 3690,356 | 4492,608 | 8985,215 |
| АИР355SMВ4 | 315/1488 | 2021,673 | 5054,183 | 5862,853 | 12534,375 |
| АИР355SMС4 | 355/1488 | 2278,394 | 5012,466 | 6151,663 | 15493,078 |
| АИР160S6 | 11/970 | 108,299 | 205,768 | 314,067 | 12,021 |
| АИР160М6 | 15/970 | 147,680 | 339,665 | 443,041 | 20,675 |
| АИР180М6 | 18,5/970 | 182,139 | 400,706 | 546,418 | 29,324 |
| АИР200М6 | 22/975 | 215,487 | 517,169 | 711,108 | 50,209 |
| АИР200L6 | 30/975 | 293,846 | 617,077 | 881,538 | 102,846 |
| АИР225М6 | 37/980 | 360,561 | 721,122 | 1081,684 | 186,050 |
| АИР250S6 | 45/986 | 435,852 | 784,533 | 1307,556 | 440,210 |
| АИР250М6 | 55/986 | 532,708 | 1012,145 | 1811,207 | 633,922 |
| АИР280S6 | 75/985 | 727,157 | 1454,315 | 2326,904 | 1090,736 |
| АИР280М6 | 90/985 | 872,589 | 1745,178 | 2792,284 | 1657,919 |
| АИР315S6 | 110/987 | 1064,336 | 1809,372 | 2873,708 | 4044,478 |
| АИР315М6 | 132/989 | 1274,621 | 2166,855 | 3696,400 | 5735,794 |
| АИР355МА6 | 160/993 | 1538,771 | 2923,666 | 3539,174 | 11848,540 |
| АИР355МВ6 | 200/993 | 1923,464 | 3654,582 | 4423,968 | 17118,832 |
| АИР355MLA6 | 250/993 | 2404,330 | 4568,228 | 5529,960 | 25485,901 |
| AИР355MLB6 | 315/992 | 3032,510 | 6065,020 | 7278,024 | 40029,133 |
| АИР160S8 | 7,5/730 | 98,116 | 156,986 | 235,479 | 13,246 |
| АИР160М8 | 11/730 | 1007,329 | 1712,459 | 2417,589 | 181,319 |
| АИР180М8 | 15/730 | 196,233 | 333,596 | 529,829 | 41,994 |
| АИР200М8 | 18,5/728 | 242,685 | 509,639 | 606,714 | 67,952 |
| АИР200L8 | 22/725 | 289,793 | 579,586 | 724,483 | 88,966 |
| АИР225М8 | 30/735 | 389,796 | 701,633 | 1052,449 | 214,388 |
| АИР250S8 | 37/738 | 478,794 | 861,829 | 1196,985 | 481,188 |
| АИР250М8 | 45/735 | 584,694 | 1052,449 | 1520,204 | 695,786 |
| АИР280S8 | 55/735 | 714,626 | 1357,789 | 2143,878 | 1071,939 |
| АИР280М8 | 75/735 | 974,490 | 1754,082 | 2728,571 | 1851,531 |
| АИР315S8 | 90/740 | 1161,486 | 1509,932 | 2671,419 | 4413,649 |
| АИР315М8 | 110/742 | 1415,768 | 2265,229 | 3964,151 | 6370,957 |
| АИР355SMA8 | 132/743 | 1696,635 | 2714,616 | 3902,261 | 12215,774 |
| AИР355SMB8 | 160/743 | 2056,528 | 3496,097 | 4935,666 | 18097,443 |
| AИР355MLA8 | 200/743 | 2570,659 | 4627,187 | 6940,781 | 26991,925 |
| AИР355MLB8 | 250/743 | 4498,654 | 7647,712 | 10796,770 | 58032,638 |
Расчет крутящего момента – формула
Примечание: при расчете стоит учесть коэффициент проскальзывания асинхронного двигателя.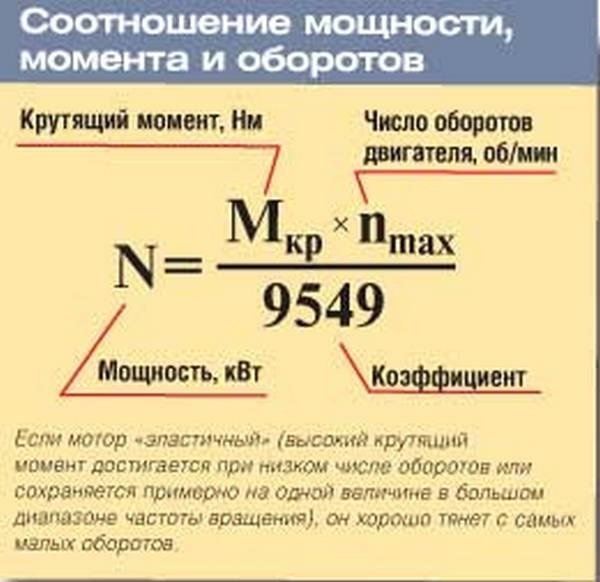 Номинальное количество оборотов двигателя не совпадает с реальным. Точное количество оборотов вы сможете найти, зная маркировку, в таблице выше.
Номинальное количество оборотов двигателя не совпадает с реальным. Точное количество оборотов вы сможете найти, зная маркировку, в таблице выше.
Расчет онлайн
Для расчета крутящего момента электродвигателя онлайн введите значение мощности ЭД и реальную угловую скорость (количество оборотов в минуту)
тут будет калькулятор
После расчета крутящего момента, посмотрите схемы подключения асинхронных электродвигателей звездой и треугольником на сайте «Слобожанского завода»
Что такое крутящий момент электродвигателя
Одним из важных параметров электродвигателя, который так же важен при его выборе, является крутящий момент. Эта величина определяется произведением приложенной к плечу рычага силы и зависит исключительно от степени нагрузки. Если в двигателях внутреннего сгорания данную нагрузку задаётся коленчатым валом, то асинхронные электродвигатели получают величину крутящего момента от токов возбуждения. При этом величина этого момента будет зависеть от скорости вращающегося в магнитном поле статора устройства, называемого ротор. В зависимости от периода и способа определения, крутящий момент разделяют на:
При этом величина этого момента будет зависеть от скорости вращающегося в магнитном поле статора устройства, называемого ротор. В зависимости от периода и способа определения, крутящий момент разделяют на:
- статический (пусковой) – минимальный момент холостого хода;
- промежуточный – развивает значение при работе двигателя от 0 величины оборотов до максимального значения в номинальной величине напряжения;
- максимальный – развивающийся при эксплуатации двигателя;
- номинальный – соответствует номинальным значениям мощности и оборотов.
Для вычисления величины крутящего момента, определяющегося в «кгм» (килограмм на метр) или «Нм» (ньютон на метр), многие электротехнические пособия предлагают специальные формулы, учитывающие кроме основного действия вращающегося магнитного поля ряд всевозможных факторов, например:
- напряжения сети;
- величину индуктивного и активного сопротивления;
- зависимость от увеличения скольжения.

Но, рост скольжения не всегда приносит высокий момент. Зачастую, при достижении критических значений, наблюдается его резкое снижение. Такое явление обозначается как опрокидывающий момент. Одним из устройств, стабилизирующих скорость вращения ротора, а значит и величину момента кручения является частотный преобразователь, применение которого сейчас очень распространено во всех сферах, где от контроля работы двигателя зависит и успешность выполнения множественных производственных задач.
Выбираем электродвигатель по крутящему моменту
Для выбора, требуемого к выполнению тех или иных задач электродвигателя, берут в учёт практически все его характеристики, начиная от показателей мощности и заканчивая массогабаритными параметрами. Каждый из элементов по-своему важен в решении нюансов. Не меньшее значение припадает и на крутящий момент. Благодаря тому, что момент кручения напрямую связан с оборотами в соотношении: чем больше сами обороты, тем меньше будет момент, выбор электродвигателя будет исходить из следующих нюансов:
- из скоростных требований.
 В этом случае, более полезным будет выбор двигателя по малому моменту для работающих со слабыми усилиями и на большой скорости, и со средними либо высокими показателями моментов пуска для работающих в усиленных режимах. На малых скоростях;
В этом случае, более полезным будет выбор двигателя по малому моменту для работающих со слабыми усилиями и на большой скорости, и со средними либо высокими показателями моментов пуска для работающих в усиленных режимах. На малых скоростях; - по пусковым напряжениям. Здесь учитывается первичное усилие, например, для управления лифтом следует подбирать двигатели высокого пускового момента, способного поднимать большие грузы со старта. Хотя, многие статьи про электродвигатели рекомендуют так же применять устройства плавного пуска, умеющие обезопасить от нежелательных перегрузов.
Стоит помнить, что выбор осуществляется не по одному из показателей, даже при ориентировании относительно крутящего момента, ведь каждый из показателей ориентируется по рабочей предрасположенности электротехнического приводного устройства и его рабочих нагрузок в статистических и динамических эксплуатационных условиях, задаваемых самим предприятием.
Электродвигатели Остались вопросы?
Специалисты ЭНЕРГОПУСК ответят на Ваши вопросы:
8-800-700-11-54 (8-18, Пн-Вт)
Мощность и вращающий момент электродвигателя.
Мощность и вращающий момент электродвигателя
Данная глава посвящена вращающему моменту: что это такое, для чего он нужен и др. Мы также разберём типы нагрузок в зависимости от моделей насосов и соответствие между электродвигателем и нагрузкой насоса.
Вы когда-нибудь пробовали провернуть вал пустого насоса руками? Теперь представьте, что вы поворачиваете его, когда насос заполнен водой. Вы почувствуете, что в этом случае, чтобы создать вращающий момент, требуется гораздо большее усилие.
А теперь представьте, что вам надо крутить вал насоса несколько часов подряд. Вы бы устали быстрее, если бы насос был заполнен водой, и почувствовали бы, что потратили намного больше сил за тот же период времени, чем при выполнении тех же манипуляций с пустым насосом. Ваши наблюдения абсолютно верны: требуется большая мощность, которая является мерой работы (потраченной энергии) в единицу времени. Как правило, мощность стандартного электродвигателя выражается в кВт.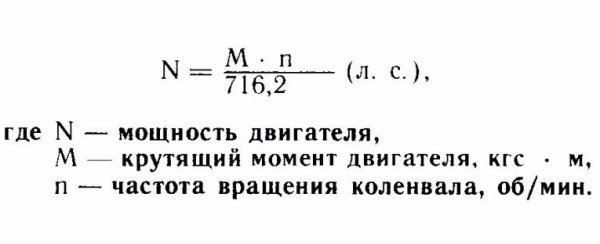
Вращающий момент (T) – это произведение силы на плечо силы. В Европе он измеряется в Ньютонах на метр (Нм).
Как видно из формулы, вращающий момент увеличивается, если возрастает сила или плечо силы – или и то и другое. Например, если мы приложим к валу силу в 10 Н, эквивалентную 1 кг, при длине рычага (плече силы) 1 м, в результате, вращающий момент будет 10 Нм. При увеличении силы до 20 Н или 2 кг, вращающий момент будет 20 Нм. Таким же образом, вращающий момент был бы 20 Нм, если бы рычаг увеличился до 2 м, а сила составляла 10 Н. Или при вращающем моменте в 10 Нм с плечом силы 0,5 м сила должна быть 20 Н.
Работа и мощность
Теперь остановимся на таком понятии как «работа», которое в данном контексте имеет особое значение. Работа совершается всякий раз, когда сила – любая сила – вызывает движение. Работа равна силе, умноженной на расстояние. Для линейного движения мощность выражается как работа в определённый момент времени.
Если мы говорим о вращении, мощность выражается как вращающий момент (T), умноженный на частоту вращения (w).
Частота вращения объекта определяется измерением времени, за которое определённая точка вращающегося объекта совершит полный оборот. Обычно эта величина выражается в оборотах в минуту, т.е. мин-1 или об/мин. Например, если объект совершает 10 полных оборотов в минуту, это означает, что его частота вращения: 10 мин-1 или 10 об/мин.
Итак, частота вращения измеряется в оборотах в минуту, т.е. мин-1.
Приведем единицы измерения к общему виду.
Для наглядности возьмём разные электродвигатели, чтобы более подробно проанализировать соотношение между мощностью, вращающим моментом и частотой вращения. Несмотря на то, что вращающий момент и частота вращения электродвигателей сильно различаются, они могут иметь одинаковую мощность.
Например, предположим, что у нас 2-полюсный электродвигатель (с частотой вращения 3000 мин-1) и 4-полюсной электродвигатель (с частотой вращения 1500 мин-1). Мощность обоих электродвигателей 3,0 кВт, но их вращающие моменты отличаются.
Мощность обоих электродвигателей 3,0 кВт, но их вращающие моменты отличаются.
Таким образом, вращающий момент 4-полюсного электродвигателя в два раза больше вращающего момента двухполюсного электродвигателя с той же мощностью.
Как образуется вращающий момент и частота вращения?
Теперь, после того, как мы изучили основы вращающего момента и скорости вращения, следует остановиться на том, как они создаются.
В электродвигателях переменного тока вращающий момент и частота вращения создаются в результате взаимодействия между ротором и вращающимся магнитным полем. Магнитное поле вокруг обмоток ротора будет стремиться к магнитному полю статора. В реальных рабочих условиях частота вращения ротора всегда отстаёт от магнитного поля. Таким образом, магнитное поле ротора пересекает магнитное поле статора и отстает от него и создаёт вращающий момент. Разницу в частоте вращения ротора и статора, которая измеряется в %, называют скоростью скольжения.

Скольжение является основным параметром электродвигателя, характеризующий его режим работы и нагрузку. Чем больше нагрузка, с которой должен работать электродвигатель, тем больше скольжение.
Помня о том, что было сказано выше, разберём ещё несколько формул. Вращающий момент индукционного электродвигателя зависит от силы магнитных полей ротора и статора, а также от фазового соотношения между этими полями. Это соотношение показано в следующей формуле:
Сила магнитного поля, в первую очередь, зависит от конструкции статора и материалов, из которых статор изготовлен. Однако напряжение и частота тока также играют важную роль. Отношение вращающих моментов пропорционально квадрату отношения напряжений, т.е. если подаваемое напряжение падает на 2%, вращающий момент, следовательно, уменьшается на 4%.
Потребляемая мощность электродвигателя
Ток ротора индуцируется через источник питания, к которому подсоединён электродвигатель, а магнитное поле частично создаётся напряжением. Входную мощность можно вычислить, если нам известны данные источника питания электродвигателя, т.е. напряжение, коэффициент мощности, потребляемый ток и КПД.
Входную мощность можно вычислить, если нам известны данные источника питания электродвигателя, т.е. напряжение, коэффициент мощности, потребляемый ток и КПД.
В Европе мощность на валу обычно измеряется в киловаттах. В США мощность на валу измеряется в лошадиных силах (л.с.).
Если вам необходимо перевести лошадиные силы в киловатты, просто умножьте соответствующую величину (в лошадиных силах) на 0,746. Например, 20 л.с. равняется (20 • 0,746) = 14,92 кВт.
И наоборот, киловатты можно перевести в лошадиные силы умножением величины в киловаттах на 1,341. Это значит, что 15 кВт равняется 20,11 л.с.
Момент электродвигателя
Мощность [кВт или л.с.] связывает вращающий момент с частотой вращения, чтобы определить общий объём работы, который должен быть выполнен за определённый промежуток времени.
Рассмотрим взаимодействие между вращающим моментом, мощностью и частотой вращения, а также их связь с электрическим напряжением на примере электродвигателей Grundfos.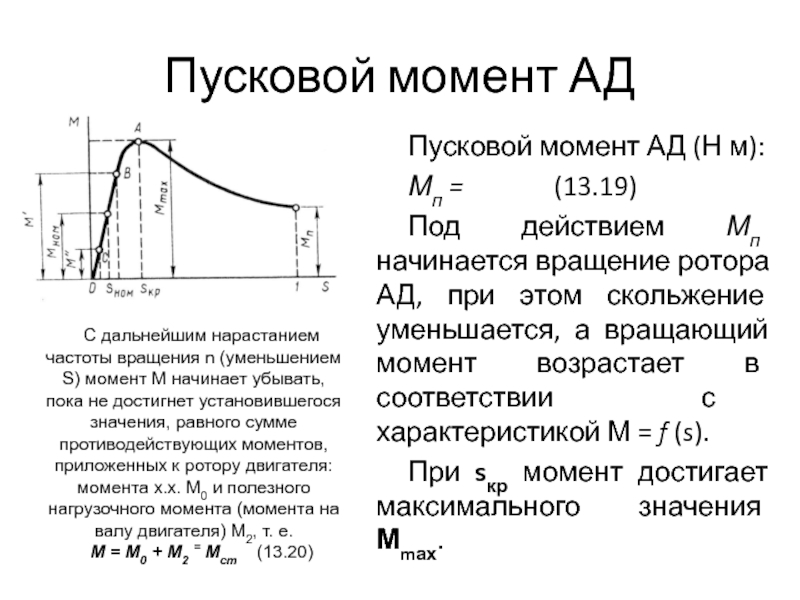 Электродвигатели имеют одну и ту же номинальную мощность как при 50 Гц, так и при 60 Гц.
Электродвигатели имеют одну и ту же номинальную мощность как при 50 Гц, так и при 60 Гц.
Это влечёт за собой резкое снижение вращающего момента при 60 Гц: частота 60 Гц вызывает 20%-ное увеличение числа оборотов, что приводит к 20%-ному уменьшению вращающего момента. Большинство производителей предпочитают указывать мощность электродвигателя при 60 Гц, таким образом, при снижении частоты тока в сети до 50 Гц электродвигатели будут обеспечивать меньшую мощность на валу и вращающий момент. Электродвигатели обеспечивают одинаковую мощность при 50 и 60 Гц.
Графическое представление вращающего момента электродвигателя изображено на рисунке.
Иллюстрация представляет типичную характеристику вращающий момент/частота вращения. Ниже приведены термины, используемые для характеристики вращающего момента электродвигателя переменного тока.
Пусковой момент (Мп): Механический вращающий момент, развиваемый электродвигателем на валу при пуске, т. е. когда через электродвигатель пропускается ток при полном напряжении, при этом вал застопорен.
е. когда через электродвигатель пропускается ток при полном напряжении, при этом вал застопорен.
Минимальный пусковой момент (Ммин): Этот термин используется для обозначения самой низкой точки на кривой вращающий момент/частота вращения электродвигателя, нагрузка которого увеличивается до полной скорости вращения. Для большинства электродвигателей Grundfos величина минимального пускового момента отдельно не указывается, так как самая низкая точка находится в точке заторможенного ротора. В результате для большинства электродвигателей Grundfos минимальный пусковой момент такой же, как пусковой момент.
Блокировочный момент (Мблок): Максимальный вращающий момент – момент, который создаёт электродвигатель переменного тока с номинальным напряжением, подаваемым при номинальной частоте, без резких скачков скорости вращения. Его называют предельным перегрузочным моментом или максимальным вращающим моментом.
Вращающий момент при полной нагрузке (Мп. н.): Вращающий момент, необходимый для создания номинальной мощности при полной нагрузке.
н.): Вращающий момент, необходимый для создания номинальной мощности при полной нагрузке.
Нагрузка насосов и типы нагрузки электродвигателя
Выделяют следующие типы нагрузок:
Постоянная мощность
Термин «постоянная мощность» используется для определённых типов нагрузки, в которых требуется меньший вращающий момент при увеличении скорости вращения, и наоборот. Нагрузки при постоянной мощности обычно применяются в металлообработке, например, сверлении, прокатке и т.п.
Постоянный вращающий момент
Как видно из названия – «постоянный вращающий момент» – подразумевается, что величина вращающего момента, необходимого для приведения в действие какого- либо механизма, постоянна, независимо от скорости вращения. Примером такого режима работы могут служить конвейеры.
Переменный вращающий момент и мощность
«Переменный вращающий момент» – эта категория представляет для нас наибольший интерес. Этот момент имеет отношение к нагрузкам, для которых требуется низкий вращающий момент при низкой частоте вращения, а при увеличении скорости вращения требуется более высокий вращающий момент. Типичным примером являются центробежные насосы.
Этот момент имеет отношение к нагрузкам, для которых требуется низкий вращающий момент при низкой частоте вращения, а при увеличении скорости вращения требуется более высокий вращающий момент. Типичным примером являются центробежные насосы.
Вся остальная часть данного раздела будет посвящена исключительно переменному вращающему моменту и мощности.
Определив, что для центробежных насосов типичным является переменный вращающий момент, мы должны проанализировать и оценить некоторые характеристики центробежного насоса. Использование приводов с переменной частотой вращения обусловлено особыми законами физики. В данном случае это законы подобия, которые описывают соотношение между разностями давления и расходами.
Во-первых, подача насоса прямо пропорциональна частоте вращения. Это означает, что если насос будет работать с частотой вращения на 25% больше, подача увеличится на 25%.
Во-вторых, напор насоса будет меняться пропорционально квадрату изменения скорости вращения. Если частота вращения увеличивается на 25%, напор возрастает на 56%.
Если частота вращения увеличивается на 25%, напор возрастает на 56%.
В-третьих, что особенно интересно, мощность пропорциональна кубу изменения скорости вращения. Это означает, что если требуемая частота вращения уменьшается на 50%, это равняется 87,5%-ному уменьшению потребляемой мощности.
Итак, законы подобия объясняют, почему использование приводов с переменной частотой вращения более целесообразно в тех областях применения, где требуются переменные значения расхода и давления. Grundfos предлагает ряд электродвигателей со встроенным частотным преобразователем, который регулирует частоту вращения для достижения именно этой цели.
Так же как подача, давление и мощность, потребная величина вращающего момента зависит от скорости вращения.
На рисунке показан центробежный насос в разрезе. Требования к вращающему моменту для такого типа нагрузки почти противоположны требованиям при «постоянной мощности». Для нагрузок при переменном вращающем моменте потребный вращающий момент при низкой частоте вращения – мал, а потребный вращающий момент при высокой частоте вращения – велик. В математическом выражении вращающий момент пропорционален квадрату скорости вращения, а мощность – кубу скорости вращения.
В математическом выражении вращающий момент пропорционален квадрату скорости вращения, а мощность – кубу скорости вращения.
Это можно проиллюстрировать на примере характеристики вращающий момент/частота вращения, которую мы использовали ранее, когда рассказывали о вращающем моменте электродвигателя:
Когда электродвигатель набирает скорость от нуля до номинальной скорости, вращающий момент может значительно меняться. Величина вращающего момента, необходимая при определённой нагрузке, также изменяется с частотой вращения. Чтобы электродвигатель подходил для определённой нагрузки, необходимо чтобы величина вращающего момента электродвигателя всегда превышала вращающий момент, необходимый для данной нагрузки.
В примере, центробежный насос при номинальной нагрузке имеет вращающий момент, равный 70 Нм, что соответствует 22 кВт при номинальной частоте вращения 3000 мин-1. В данном случае насосу при пуске требуется 20% вращающего момента при номинальной нагрузке, т. е. приблизительно 14 Нм. После пуска вращающий момент немного падает, а затем, по мере того, как насос набирает скорость, увеличивается до величины полной нагрузки.
е. приблизительно 14 Нм. После пуска вращающий момент немного падает, а затем, по мере того, как насос набирает скорость, увеличивается до величины полной нагрузки.
Очевидно, что нам необходим насос, который будет обеспечивать требуемые значения расход/напор (Q/H). Это значит, что нельзя допускать остановок электродвигателя, кроме того, электродвигатель должен постоянно ускоряться до тех пор, пока не достигнет номинальной скорости. Следовательно, необходимо, чтобы характеристика вращающего момента совпадала или превышала характеристику нагрузки на всём диапазоне от 0% до 100% скорости вращения. Любой «избыточный» момент, т.е. разница между кривой нагрузки и кривой электродвигателя, используется как ускорение вращения.
Соответствие электродвигателя нагрузке
Если нужно определить, отвечает ли вращающий момент определённого электродвигателя требованиям нагрузки, Вы можете сравнить характеристики скорости вращения/вращающего момента электродвигателя с характеристикой скорости вращения/ вращающего момента нагрузки. Вращающий момент, создаваемый электродвигателем, должен превышать потребный для нагрузки вращающий момент, включая периоды ускорения и полной скорости вращения.
Вращающий момент, создаваемый электродвигателем, должен превышать потребный для нагрузки вращающий момент, включая периоды ускорения и полной скорости вращения.
Характеристика зависимости вращающего момента от скорости вращения стандартного электродвигателя и центробежного насоса.
Если мы посмотрим на характеристику , то увидим, что при ускорении электродвигателя его пуск производится при токе, соответствующем 550% тока полной нагрузки.
Когда двигатель приближается к своему номинальному значению скорости вращения, ток снижается. Как и следовало ожидать, во время начального периода пуска потери на электродвигателе высоки, поэтому этот период не должен быть продолжительным, чтобы не допустить перегрева.
Очень важно, чтобы максимальная скорость вращения достигалась как можно точнее. Это связано с потребляемой мощностью: например, увеличение скорости вращения на 1% по сравнению со стандартным максимумом приводит к 3%-ному увеличению потребляемой мощности.
Потребляемая мощность пропорциональна диаметру рабочего колеса насоса в четвертой степени.
Уменьшение диаметра рабочего колеса насоса на 10% приводит к уменьшению потребляемой мощности на (1- (0.9 * 0.9 * 0.9 * 0.9)) * 100 = 34%, что равно 66% номинальной мощности. Эта зависимость определяется исключительно на практике, так как зависит от типа насоса, конструкции рабочего колеса и от того, насколько вы уменьшаете диаметр рабочего колеса.
Время пуска электрдвигателя
Если нам необходимо подобрать типоразмер электродвигателя для определённой нагрузки, например для центробежных насосов, основная наша задача состоит в том, чтобы обеспечить соответствующий вращающий момент и мощность в номинальной рабочей точке, потому что пусковой момент для центробежных насосов довольно низкий. Время пуска достаточно ограниченно, так как вращающий момент довольно высокий.
Нередко для сложных систем защиты и контроля электродвигателей требуется некоторое время для их пуска, чтобы они могли замерить пусковой ток электродвигателя. Время пуска электродвигателя и насоса рассчитывается с помощью следующей формулы:
Время пуска электродвигателя и насоса рассчитывается с помощью следующей формулы:
tпуск = время, необходимое электродвигателю насоса, чтобы достичь частоты вращения при полной нагрузке
n = частота вращения электродвигателя при полной нагрузке
Iобщ = инерция, которая требует ускорения, т.е. инерция вала электродвигателя, ротора, вала насоса и рабочих колёс.
Момент инерции для насосов и электродвигателей можно найти в соответствующих технических данных.
Мизб = избыточный момент, ускоряющий вращение. Избыточный момент равен вращающему моменту электродвигателя минус вращающий момент насоса при различных частотах вращения.
Мизб можно рассчитать по следующим формулам:
Как видно из приведённых вычислений, выполненных для данного примера с электродвигателем мощностью 4 кВт насоса CR, время пуска составляет 0,11 секунды.
Число пусков электродвигателя в час
Современные сложные системы управления электродвигателями могут контролировать число пусков в час каждого конкретного насоса и электродвигателя. Необходимость контроля этого параметра состоит в том, что каждый раз, когда осуществляется пуск электродвигателя с последующим ускорением, отмечается высокое потребление пускового тока. Пусковой ток нагревает электродвигатель. Если электродвигатель не остывает, продолжительная нагрузка от пускового тока значительно нагревает обмотки статора электродвигателя, что приводит к выходу из строя электродвигателя или сокращению срока службы изоляции.
Необходимость контроля этого параметра состоит в том, что каждый раз, когда осуществляется пуск электродвигателя с последующим ускорением, отмечается высокое потребление пускового тока. Пусковой ток нагревает электродвигатель. Если электродвигатель не остывает, продолжительная нагрузка от пускового тока значительно нагревает обмотки статора электродвигателя, что приводит к выходу из строя электродвигателя или сокращению срока службы изоляции.
Обычно за количество пусков, которое может выполнить электродвигатель в час, отвечает поставщик электродвигателя. Например, Grundfos указывает максимальное число пусков в час в технических данных на насос, так как максимальное количество пусков зависит от момента инерции насоса.
Мощность и КПД (eta) электродвигателя
Существует прямая связь между мощностью, потребляемой электродвигателем от сети, мощностью на валу электродвигателя и гидравлической мощностью, развиваемой насосом.
При производстве насосов используются следующие обозначения этих трёх различных типов мощности.
P1 (кВт) Входная электрическая мощность насосов – это мощность, которую электродвигатель насоса получает от источника электрического питания. Мощность P! равна мощности P2, разделённой на КПД электродвигателя.
P2 (кВт) Мощность на валу электродвигателя – это мощность, которую электродвигатель передает на вал насоса.
Р3 (кВт) Входная мощность насоса = P2, при условии, что соединительная муфта между валами насоса и электродвигателя не рассеивает энергию.
Р4 (кВт) Гидравлическая мощность насоса.
Крутящий момент электродвигателя
В соответствии с данными паспорта можно определить вращающий момент на валу электродвигателя и максимальное усилие, которое развивается на шкиве. Крутящий момент электродвигателя определяется с помощью нескольких параметров: величины магнитного потока, углового сдвига ЭДС и тока в роторе. Причем каждая величина зависит от момента скольжения и частоты с проводимым напряжением.
Крутящий момент вращения электродвигателя
- Непосредственно крутящий момент вращения электродвигателя можно определить по отношению электромагнитной мощности к угловой скорости ротора.
 Величина момента вращения прямо пропорциональна квадрату напряжения и при этом обратно пропорциональна квадрату частоты.
Величина момента вращения прямо пропорциональна квадрату напряжения и при этом обратно пропорциональна квадрату частоты.
- Начальным значением крутящего момента электродвигателя считается тот момент, когда электродвигатель остается неподвижным. Минимальное значение – от развития скорости неподвижного момента до номинальной. При проведении расчетов максимальное значение крутящего момента определяется при самой высокой скорости, развиваемой валом электродвигателя.
- Для конкретных расчетов используются соответствующие формулы. Но при покупке электродвигателя расчеты производить нет необходимости, так как они уже произведены заводом-изготовителем и все параметры указаны в техническом паспорте к электродвигателю.
Определение направления вращения вала электродвигателя
Любой асинхронный электрический двигатель может вращаться по часовой стрелке и против нее. Данные параметры зависят от направления магнитного поля, создаваемого вокруг статора.
Если направление вращения вала электродвигателя не указано и опытное наблюдение невозможно, следует внимательно изучить маркировку на корпусе и схемы соединений, поставляемые производителем.
Следует отметить, монтаж любого электродвигателя должны проводить специалисты с соответствующим опытом и знаниями. Только тогда производитель гарантирует длительную и безопасную работы электромотора.
Направление вращения электродвигателя вы сможете узнать во время проведения монтажа или при периодическом техническом обслуживании, которое рекомендуется проводить систематически.
Покупая электродвигатель, продавец-консультант компании «РДЭ» даст подробную информацию по поводу всех интересующих Вас вопросов и поможет подобрать тот электродвигатель, который будет полностью соответствовать всем заявленным требованиям.
Просмотров: 4517
Дата: Воскресенье, 15 Декабрь 2013
Что следует учитывать при выборе асинхронного электродвигателя
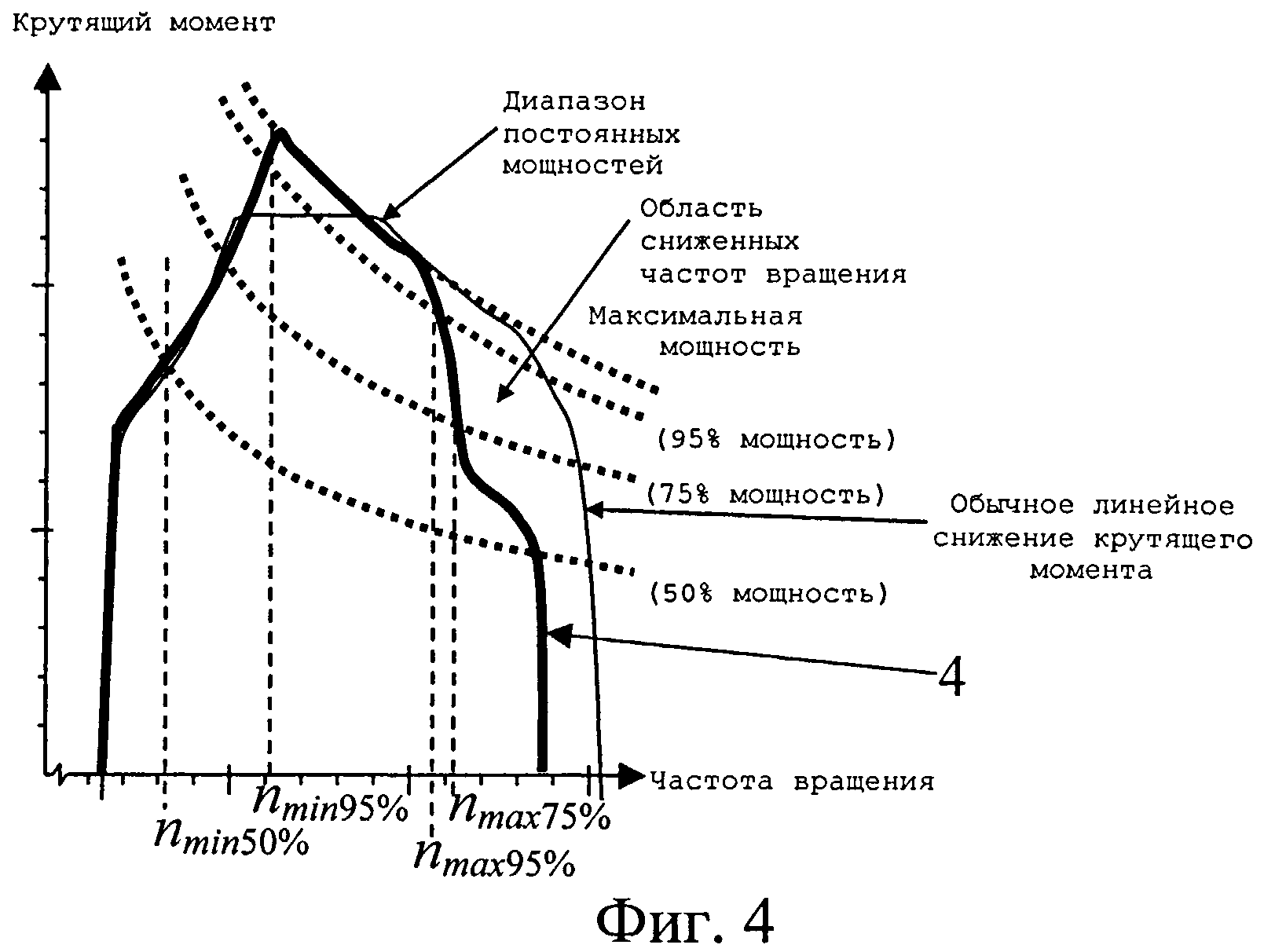
При выборе асинхронных электродвигателей переменного тока часто не учитываются требования к конструкции, которые связаны с их применением в составе того или иного оборудования. Также обычно имеет место подход, основанный на универсальности электродвигателя, и тогда выбор зависит только от его напряжения, мощности и скорости вращения ротора. Тем не менее есть еще целый ряд дополнительных аспектов для рассмотрения, таких как диапазон напряжения питания, сохранение номинальной мощности при изменении скорости вращения и область применения. Все это в итоге сводится к решению следующих вопросов: какова цель применения электродвигателя, как сделать все быстрее и эффективнее?
Также обычно имеет место подход, основанный на универсальности электродвигателя, и тогда выбор зависит только от его напряжения, мощности и скорости вращения ротора. Тем не менее есть еще целый ряд дополнительных аспектов для рассмотрения, таких как диапазон напряжения питания, сохранение номинальной мощности при изменении скорости вращения и область применения. Все это в итоге сводится к решению следующих вопросов: какова цель применения электродвигателя, как сделать все быстрее и эффективнее?
Базовые принципы выбора электродвигателя
Отправными точками для выбора асинхронного двигателя являются напряжение питания обмоток статора, создающего магнитное поле, а также номинальная мощность и скорость вращения ротора, которые соответствуют требованиям конкретного применения. Еще один, не менее важный момент — это необходимый вариант установки двигателя в приводе. Должен ли двигатель иметь крепление на основании, или он будет помещен на фланец на конце привода, или же должен предоставлять обе возможности? Кроме того, необходимо учитывать характеристики окружающей среды, в которой будет эксплуатироваться двигатель. При этом для выбора двигателя необходимо знать, потребуется ли ему работать под дождем и имеется ли вообще риск попадания на него воды, а также оценить уровень загрязнения и наличия пыли. Для эксплуатации в жестких условиях хорошо подходят электродвигатели закрытого типа с вентиляторным охлаждением (англ. totally enclosed fan cooled, TEFC) или электродвигатели закрытого типа без охлаждения (англ. totally enclosed non-vented, TENV). Если среда, в которой будет использоваться двигатель, не загрязнена и он будет эксплуатироваться без риска попадания на него воды, то в этом случае может быть достаточно применения каплезащищенного электродвигателя открытого исполнения (англ. open drip proof, ODP).
При этом для выбора двигателя необходимо знать, потребуется ли ему работать под дождем и имеется ли вообще риск попадания на него воды, а также оценить уровень загрязнения и наличия пыли. Для эксплуатации в жестких условиях хорошо подходят электродвигатели закрытого типа с вентиляторным охлаждением (англ. totally enclosed fan cooled, TEFC) или электродвигатели закрытого типа без охлаждения (англ. totally enclosed non-vented, TENV). Если среда, в которой будет использоваться двигатель, не загрязнена и он будет эксплуатироваться без риска попадания на него воды, то в этом случае может быть достаточно применения каплезащищенного электродвигателя открытого исполнения (англ. open drip proof, ODP).
Выбор инвертора
Благодаря усилиям лоббистов местных энергетических компаний в сочетании с преимуществами, получаемыми при возможности регулирования скорости вращения ротора двигателей, все более распространенными становятся частотно-регулируемые приводы (ЧРП, англ. variable frequency drive, VFD). При их использовании особое внимание следует уделять генерации электромагнитных помех, которая характерна для таких приводов исходя из самой их природы. Для того чтобы электродвигатель мог использоваться с ЧРП, необходимо учитывать несколько технических особенностей, которым должен удовлетворять подходящий по остальным характеристикам электродвигатель. Среди них можно выделить две главные:
Максимально допустимое напряжение изоляции обмоточных проводов статора электродвигателя.
Электрическая прочность изоляции провода, из которого выполнена обмотка статора асинхронного электродвигателя, находится в пределах 1000–1600 В, но, как правило, в документации указывается значение прочности изоляции, равное 1200 В. Однако чем больше воздушный зазор между приводом и двигателем, тем, естественно, бо́льшим скачкам переходного напряжения, воздействующим на двигатель, он может противостоять. Электродвигатель, в котором для обмотки статора используется провод с электрической прочностью изоляции провода, равной 1600 В, может иметь ссылку на стандарт Национальной ассоциации производителей электрооборудования (NEMA, США) NEMA MG-1 2003, раздел 4, параграф 31, в котором говорится, что двигатель должен выдерживать без повреждений начальное напряжение коронного разряда (англ. corona inception voltage, CIV) уровнем до 1600 В.
corona inception voltage, CIV) уровнем до 1600 В.
Коэффициент сохранения постоянного крутящего момента (CT) двигателя, часто упоминается как «xx: 1 CT».
Этот показатель дает представление о диапазоне регулирования скорости. По нему можно узнать, насколько может быть снижена скорость вращения ротора двигателя, при которой он будет работать с сохранением того же крутящего момента (англ. CT — constant torque, постоянный крутящий момент), что и при номинальной скорости. Ниже этого значения крутящего момента производительность асинхронного электродвигателя снижается.
Например, возьмем электродвигатель мощностью 10 л. с. с начальной скоростью 1800 об/мин. При номинальной скорости (около 1800 об/мин), как указано, он имеет крутящий момент 29 фунтов на фут. Если в спецификации на электродвигатель написано, что коэффициент сохранения номинальной мощности составляет 10:1 CT, это означает, что такой электродвигатель может обеспечить номинальный крутящий момент до скорости 180 об/мин. Если же указано, что электродвигатель имеет коэффициент сохранения номинальной мощности 1000:1 CT, то имеется в виду, что крутящий момент сможет сохранять номинальное значение до скорости 1,8 об/мин.
Если же указано, что электродвигатель имеет коэффициент сохранения номинальной мощности 1000:1 CT, то имеется в виду, что крутящий момент сможет сохранять номинальное значение до скорости 1,8 об/мин.
При этом необходимо учитывать еще один нюанс, который связан с охлаждением электродвигателя. Нужно обязательно уточнить у поставщика, будет ли электродвигатель перегреваться при длительной работе на малых оборотах. Дело в том, что если двигатель охлаждается за счет крыльчатки, закрепленной на его валу, то на малых скоростях вы столкнетесь с низкой скоростью охлаждающего двигатель потока воздуха. Если асинхронный электродвигатель работает на низкой скорости и в течение длительного времени используется с большим крутящим моментом, то он будет выделять много тепла — при таких условиях, возможно, придется остановить свой выбор на двигателе с иным методом охлаждения.
Например, для организации принудительного охлаждения можно применить воздуходувное устройство, имеющее собственный, отдельно управляемый двигатель. Производительность такого устройства не связана с системой управления электропривода. В этом случае воздушный поток, который обдувает мощный электродвигатель, будет постоянным и достаточным для его охлаждения при низкой или даже при нулевой скорости.
Производительность такого устройства не связана с системой управления электропривода. В этом случае воздушный поток, который обдувает мощный электродвигатель, будет постоянным и достаточным для его охлаждения при низкой или даже при нулевой скорости.
Связь мощности и крутящего момента
При выборе асинхронного электродвигателя еще одним важным аспектом является номинальная, или основная, скорость двигателя. Обычно используются двухполюсные (3600 об/мин) и четырехполюсные (1800 об/мин) электродвигатели. Однако имеются и коммерчески доступные 6-, 8- и 12-полюсные асинхронные электродвигатели со скоростью вращения ротора 1200, 900
и 600 об/мин соответственно. Номинальная скорость асинхронного электродвигателя напрямую связана с числом полюсов, которые такой двигатель конструктивно содержит (табл.), и определяется по следующей формуле:
Об/мин = (120 × частота) / N (число полюсов)
В качестве примечания необходимо отметить, что, хотя прямой связи здесь нет, но, как правило, с увеличением количества полюсов возрастают и размеры, а также стоимость электропривода.
Кроме того, пользователям электроприводов, в зависимости от области применения данных устройств, может понадобиться обеспечить необходимый крутящий момент путем изменения скорости. В целом по мере увеличения скорости двигателя крутящий момент уменьшается, что также относится к редукторам и цепным приводам. Это соотношение объясняется следующим уравнением:
мощность (л. с.) = (крутящий момент × × номинальная скорость) / 5252
Крутящий момент, в соответствии с заданной целью, может быть достигнут путем выбора электродвигателя с необходимой мощностью и номинальной скоростью и реализован через любую цепную, ременную передачу или редуктор. Такой подход снижает стоимость привода, его габаритные размеры и время, уходящее на замену его подвижных заменяемых частей в ходе выполнения ремонта или технического обслуживания.
Число полюсов, N | Скорость, об/мин | Крутящий момент, |
2 | 3600 | 1,46 |
4 | 1800 | 2,92 |
6 | 1200 | 4,38 |
8 | 900 | 5,84 |
10 | 720 | 7,29 |
12 | 600 | 8,75 |
 с. / фут-фунт
с. / фут-фунтПримечание. Как правило, увеличение числа полюсов приводит к увеличению габаритов, а следовательно, и к повышению стоимости привода на основе асинхронного электродвигателя
Вконтакте
Google+
Крутящий момент и зависимость крутящего момента
Как рассчитать крутящий момент, зная обороты и мощность двигателя?
Крутящий момент напрямую зависит от мощности и числа оборотов двигателя в минуту. Имеется общепринятая формула расчета крутящего момента, выражаемого в Ньютон-метрах ( русское обозначение Н·м, международное N·m )
Имеется общепринятая формула расчета крутящего момента, выражаемого в Ньютон-метрах ( русское обозначение Н·м, международное N·m )
M = P х 9550 / N
Где P – это мощность двигателя в киловаттах (кВт)
N – обороты вала в минуту
Как рассчитать мощность двигателя, зная крутящий момент и обороты?
Для такого расчета существует формула:
P = M х N / 9550
Где M – это крутящий момент двигателя
N – это обороты двигателя
Для скорости и простоты расчета воспользуйтесь удобным калькулятором крутящего момента. Впишите в ячейки калькулятора имеющиеся значения и калькулятор автоматически проставит результаты расчета.
Впишите в ячейки калькулятора имеющиеся значения и калькулятор автоматически проставит результаты расчета.
Калькулятор крутящего момента
В этом разделе мы разместили подборку статей посвященных такому важному в теории асинхронного привода понятию как момент. Здесь читатели найдут материалы раскрывающие значения отдельных терминов так или иначе связанных с понятием момента. Дополнительно мы организовали подборку статей с формулами по которым можно рассчитать конкретные значения моментов или построить их зависимости. Для большей наглядности сдесь же можно найти примеры иллюстирующие использование формул для рассчета того или иного показателя. | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||

 10.2012 19:16
10.2012 19:16
 10.2012 21:40
10.2012 21:40 Для решения этой задачи хорошо подходит асинхронный двигатель с фазным ротором. Кратко опишем, что он собой представляет. Асинхронный электродвигатель с фазным ротором имеет ротор, в пазы которого уложена обмотка. Тип соединения обмотки ротора “звезда”. Концы фаз обмотки ротора подключают к специальным контактным кольцам. Кольца вращаются вместе с валом двигателя. В цель обмоток ротора может быть включен реостат для пуска и регулирования. Подключение реостата выполняется с помощью щеточного контакта скользящего по кольцам. Данный реостат является добавочным активным сопротивлением. Это сопротивление одинаково для каждой из фаз обмотки.
Для решения этой задачи хорошо подходит асинхронный двигатель с фазным ротором. Кратко опишем, что он собой представляет. Асинхронный электродвигатель с фазным ротором имеет ротор, в пазы которого уложена обмотка. Тип соединения обмотки ротора “звезда”. Концы фаз обмотки ротора подключают к специальным контактным кольцам. Кольца вращаются вместе с валом двигателя. В цель обмоток ротора может быть включен реостат для пуска и регулирования. Подключение реостата выполняется с помощью щеточного контакта скользящего по кольцам. Данный реостат является добавочным активным сопротивлением. Это сопротивление одинаково для каждой из фаз обмотки.
 В них была использована индуктивная измерительная система.
В них была использована индуктивная измерительная система. В нашей статье мы будем использовать термин крутящий момент.
В нашей статье мы будем использовать термин крутящий момент. В литературе встречается термин синоним: тормозящий момент. В рамках теории асинхронных электродвигателей рассматривают 3 режима торможения: генераторное, динамическое и торможение противовключением.
В литературе встречается термин синоним: тормозящий момент. В рамках теории асинхронных электродвигателей рассматривают 3 режима торможения: генераторное, динамическое и торможение противовключением. Под номинальными данными понимают данные, которые определяются при работе двигателя в режиме, для которого он был спроектирован и изготовлен.
Под номинальными данными понимают данные, которые определяются при работе двигателя в режиме, для которого он был спроектирован и изготовлен. ..
.. В самом общем случае электромагнитный момент на валу двигателя определяют по формуле: Мэм = (?Еф х Iф)/?2
В самом общем случае электромагнитный момент на валу двигателя определяют по формуле: Мэм = (?Еф х Iф)/?2 Например номинальный момент или пусковой момент.
Например номинальный момент или пусковой момент.– крутящий момент в зависимости от мощности и об / мин
Движущая сила электродвигателя составляет крутящего момента – не лошадиных сил.
Крутящий момент – это крутящая сила, которая заставляет двигатель вращаться, и крутящий момент активен от 0% до 100% рабочей скорости.
Мощность, производимая двигателем, зависит от скорости двигателя и составляет
- ноль при 0% скорости и
- обычно на максимальной скорости при рабочей скорости
Примечание ! – полный крутящий момент с нулевой скорости является большим преимуществом для электромобилей.
Для полного стола – поворот экрана!
| Мощность | Скорость двигателя (об / мин) | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 3450 | 2000 | 1750 | 1000 | 500 | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Крутящий момент | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
л. с. с. | кВт | (фунт f дюйм) | (фунт f фут) | (Нм) | (фунт f дюйм) | (фунт) f фут) | (Нм) | (фунт f дюйм) | (фунт f фут) | (Нм) | (фунт на дюйма) | (фунт на фут) | (Нм) | (фунт на дюйм) | (фунт на фут) | (Нм) | ||||||||||||||||||||||||||||||||||||||||||||
| 1 | 0.75 | 18 | 1,5 | 2,1 | 32 | 2,6 | 3,6 | 36 | 3,0 | 4,1 | 63 | 5,3 | 7,1 | 126173 | 900 1,51,1 | 27 | 2,3 | 3,1 | 47 | 3,9 | 5,3 | 54 | 4,5 | 6,1 | 95 | 7. 9 9 | 10,7 | 189 | 15,8 | 21,4 | ||||||||||||||||||||||||||||||
| 2 | 1,5 | 37 | 3,0 | 4,1 | 63 | 5,3 | 7,1 | 12610,5 | 14,2 | 252 | 21,0 | 28,5 | ||||||||||||||||||||||||||||||||||||||||||||||||
| 3 | 2,2 | 55 | 4,6 | 6,2 | 95 | 7.9 | 10,7 | 108 | 9,0 | 12 | 189 | 15,8 | 21,4 | 378 | 31,5 | 42,7 | ||||||||||||||||||||||||||||||||||||||||||||
| 5 | 158 | 13,1 | 18 | 180 | 15 | 20 | 315 | 26,3 | 36 | 630 | 52,5 | 71 | ||||||||||||||||||||||||||||||||||||||||||||||||
| 7.5 | 5,6 | 137 | 11 | 15 | 236 | 20 | 27 | 270 | 23 | 31 | 473 | 39 | 39 | 9017 | ||||||||||||||||||||||||||||||||||||||||||||||
| 10 | 7,5 | 183 | 15 | 21 | 315 | 26 | 36 | 360 | 30 | 41 | 630 | 142 | ||||||||||||||||||||||||||||||||||||||||||||||||
| 15 | 11 | 274 | 23 | 31 | 473 | 39 | 53 | 540 | 45 | 61 | 158 | 214 | ||||||||||||||||||||||||||||||||||||||||||||||||
| 20 | 15 | 365 | 30 | 9017 3 41630 | 53 | 71 | 720 | 60 | 81 | 1260 | 105 | 142 | 2521 | 210 | 285 | 90038 | 52 | 788 | 66 | 89 | 900 | 75 | 102 | 1576 | 131 | 178 | 3151 | 263 | 900263 | 263 | 263 | 548 | 46 | 62 | 945 | 79 | 107 | 1080 | 90 | 122 | 1891 | 158 | 214 | 900 | 30 | 731 | 61 | 83 | 1260 | 105 | 9017 31421441 | 120 | 163 | 2521 | 210 | 285 | 5042 | 420 | 570 | |
| 50 | 37 | 131 | 178 | 1801 | 150 | 204 | 3151 | 263 | 356 | 6302 | 525 | 712 | ||||||||||||||||||||||||||||||||||||||||||||||||
| 712 | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 1891 | 158 | 214 | 2161 | 180 | 244 | 3781 | 315 | 427 | 7563 | 630 | 900 | 145 | 2206 | 184 | 249 | 2521 | 9 0173210285 | 4412 | 368 | 499 | 8823 | 735 | 997 | |||||||||||||||||||||||||||||||||||||
| 80 | 60 | 1461 | 165173 | 1461 | 165174 | 165174 | 2881 | 240 | 326 | 5042 | 420 | 570 | 10084 | 840 | 1140 | |||||||||||||||||||||||||||||||||||||||||||||
| 90 | 67 | 1644 | 1644 | 321 | 3241 | 270 | 366 | 5672 | 473 | 641 | 11344 | 945 | 1282 | |||||||||||||||||||||||||||||||||||||||||||||||
| 100 | 75173 | 263 | 356 | 3601 | 300 | 407 | 6302 | 525 | 712 | 12605 | 1050 | 1425 | ||||||||||||||||||||||||||||||||||||||||||||||||
| 125 | 93 | 2283 | 190 | 258 | 190 | 258 | 258 | 258 | 258 | 509 | 7878 | 657 | 891 | 15756 | 1313 | 1781 | ||||||||||||||||||||||||||||||||||||||||||||
| 150 | 112 | 2740 | 3103 | 310 | 450 | 611 | 9454 | 788 | 1069 | 18907 | 1576 | 2137 | ||||||||||||||||||||||||||||||||||||||||||||||||
| 175 | 131 | 31973 | 131 | 31973 | 6302 | 525 | 712 | 1 1029 | 919 | 1247 | 22058 | 1838 | 2494 | |||||||||||||||||||||||||||||||||||||||||||||||
| 200 | 149 | 3654 | 304 | 413 | 7203 720174 | 814 | 12605 | 1050 | 1425 | 25210 | 2101 | 2850 | ||||||||||||||||||||||||||||||||||||||||||||||||
| 225 | 168 | 4110 | 343 | 675 | 916 | 14180 | 1182 | 1603 | 28361 | 2363 | 3206 | |||||||||||||||||||||||||||||||||||||||||||||||||
| 250 | 187 | 4567 | 9003 | 750 | 1018 | 15756 90 174 | 1313 | 1781 | 31512 | 2626 | 3562 | |||||||||||||||||||||||||||||||||||||||||||||||||
| 275 | 205 | 5024 | 419 | 568 | 86625 | 17332 | 1444 | 1959 | 34663 | 2889 | 3918 | |||||||||||||||||||||||||||||||||||||||||||||||||
| 300 | 224 | 5480 | 457 | 62017 | 1221 | 18907 | 1576 | 2137 | 37814 | 3151 | 4275 | |||||||||||||||||||||||||||||||||||||||||||||||||
| 350 | 261 | 6394 | 12173 | 12173 | 12173 | 1050 | 1425 | 22058 | 1838 | 2494 | 44117 | 3676 | 4987 | |||||||||||||||||||||||||||||||||||||||||||||||
| 400 | 298 | 7307 | 609 | 826 | 14173 | 25210 | 2101 | 2850 | 50419 | 4202 | 5699 | |||||||||||||||||||||||||||||||||||||||||||||||||
| 450 | 336 | 8221 | 685 | 1832 | 28361 | 2363 | 3206 | 56722 | 4727 | 6412 | ||||||||||||||||||||||||||||||||||||||||||||||||||
| 550 | 410 | 10047 | 837 174 | 837 174 | 1651 | 2239 | 34663 | 2889 | 3918 | 69326 | 5777 | 7837 | ||||||||||||||||||||||||||||||||||||||||||||||||
| 600 | 448 | 10961 | 913 | 1239 | 2443 | 37814 | 3151 | 4275 | 75629 | 6302 | 8549 | |||||||||||||||||||||||||||||||||||||||||||||||||
Мощность двигателя, скорость и крутящий момент Уравнения
Imperial
дюйм-фунт = P л. с. 63025 / n (1)
с. 63025 / n (1)
где
T дюйм-фунт = крутящий момент (фунт f )
P л.с. двигатель (л.с.)
n = число оборотов в минуту (об / мин)
Альтернативно
T фут-фунт = P л.с. 5252 / n (1b)
где
T фут-фунт = крутящий момент 3 фунт = крутящий момент 74 фунт
Крутящий момент в единицах СИ можно рассчитать как
T Нм = P W 9.549 / n (2)
где
T Нм = крутящий момент (Нм)
P W = мощность (Вт)
n = обороты в минуту (об / мин)
Электродвигатель – зависимость крутящего момента от мощности и скорости
мощность (кВт)
скорость (об / мин)
Электродвигатель – мощность от крутящего момента и скорости
крутящий момент (Нм)
скорость (об / мин)
Электродвигатель – Зависимость скоростиМощность и крутящий момент
мощность (кВт)
крутящий момент (Нм)
Пример – крутящий момент электродвигателя
крутящий момент, передаваемый электродвигателем мощностью 0,75 кВт (750 Вт) при скорости 2000 об / мин можно рассчитать как
T = ( 750 Вт ) 9,549 / (2000 об / мин)
= 3,6 (Нм) Пример
от электродвигателя
Крутящий момент, передаваемый электродвигателем мощностью 100 л. с. при скорости 1000 об / мин можно рассчитать как
с. при скорости 1000 об / мин можно рассчитать как
T = (100 л.с.) 63025 / (1000 об / мин)
= 6303 (фунт f дюйм)
Для преобразования в фунт-сила-фут – разделите крутящий момент на 12 .
Крутящий момент в электрических асинхронных двигателях
Крутящий момент – это сила поворота по радиусу – с единицей измерения Нм, в системе СИ и единицами фунт-футов в британской системе мер.
Крутящий момент, развиваемый асинхронным асинхронным двигателем, изменяется, когда двигатель ускоряется от нуля до максимальной рабочей скорости.
Заблокированный ротор или пусковой момент
Момент заторможенного ротора или Пусковой момент – это крутящий момент, развиваемый электродвигателем при запуске с нулевой скоростью.
Высокий пусковой момент более важен для приложений или машин, которые трудно запускать – например, поршневых поршневых насосов, кранов и т. Д. Более низкий пусковой момент может быть принят для центробежных вентиляторов или насосов, где пусковая нагрузка мала или близка к нулю.
Д. Более низкий пусковой момент может быть принят для центробежных вентиляторов или насосов, где пусковая нагрузка мала или близка к нулю.
Момент срабатывания
Момент срабатывания – это минимальный крутящий момент, развиваемый электродвигателем при его работе от нуля до скорости полной нагрузки (до того, как он достигнет точки крутящего момента срыва).
Когда двигатель запускается и начинает ускоряться, крутящий момент в целом будет уменьшаться, пока не достигнет нижней точки на определенной скорости – тяговый момент – перед тем, как крутящий момент возрастет, пока не достигнет максимального крутящего момента на более высокой скорости – пробивной момент – точка.
Момент затяжки может быть критическим для приложений, которым требуется мощность, чтобы преодолеть некоторые временные препятствия для достижения рабочих условий.
Момент выхода из строя
Момент разрушения – это самый высокий крутящий момент, доступный перед уменьшением крутящего момента, когда машина продолжает ускоряться до рабочих условий.
Крутящий момент при полной нагрузке (номинальный) или тормозной момент
Крутящий момент при полной нагрузке – это крутящий момент, необходимый для выработки номинальной мощности электродвигателя при скорости полной нагрузки.
В британских единицах измерения крутящий момент при полной нагрузке может быть выражен как
T = 5252 P л.с. / n r (1)
, где
T = полная нагрузка крутящий момент (фунт-фут)
P л.с. = номинальная мощность
n r = номинальная частота вращения (об / мин, об / мин)
В метрических единицах номинальный крутящий момент может быть выраженным как
T = 9550 P кВт / n r (2)
где
T = номинальный крутящий момент (Нм)
P кВт = номинальная мощность ( кВт)
n r = номинальная частота вращения (об / мин)
Пример – электродвигатель и тормозной момент
Крутящий момент 912 98 60 л. с. Двигатель с частотой вращения 1725 об / мин можно рассчитать как:
с. Двигатель с частотой вращения 1725 об / мин можно рассчитать как:
T fl = 5252 (60 л.с.) / (1725 об / мин)
= 182.7 фунт-футов
NEMA Design
NEMA (Национальная ассоциация производителей электрооборудования) классифицировала электродвигатели по четырем различным конструкциям, в которых крутящий момент и инерция пусковой нагрузки являются важными критериями.
Ускоряющий момент
Ускоряющий момент = доступный крутящий момент двигателя – момент нагрузки
Устройства плавного пуска с пониженным напряжением
Устройства плавного пуска с пониженным напряжением используются для ограничения пускового тока, уменьшая крутящий момент заторможенного ротора или пусковой крутящий момент, и широко используются в приложениях, где трудно запускать или с ним нужно обращаться осторожно – например, поршневые насосы, краны, лифты и т. д.
д.
Что такое моментные двигатели и почему они так хорошо работают?
Сегодня технология прямого привода признана ведущим решением для требований высокой производительности, повышенной точности и повышенной динамики современного оборудования. Они жесткие, более компактные, обеспечивают высокие динамические характеристики, снижают стоимость владения, упрощают конструкцию машины и сокращают износ и техническое обслуживание.
Что такое моментный двигатель?Моментные двигатели – это особый класс бесщеточных синхронных двигателей с постоянными магнитами.Поскольку полезная нагрузка напрямую связана с ротором без использования элементов трансмиссии, моментные двигатели классифицируются как прямые приводы.
В зависимости от вашей точки зрения, моментный двигатель представляет собой свернутый линейный двигатель или классический сервопривод с большим количеством полюсов. Большое количество полюсов позволяет обычным моментным двигателям достигать высокого крутящего момента при умеренных скоростях. Другой привлекательной особенностью является их компактная конструкция, которая включает узкий ламинированный пакет и большой полый вал или отверстие.
Другой привлекательной особенностью является их компактная конструкция, которая включает узкий ламинированный пакет и большой полый вал или отверстие.
Как и линейные двигатели, моментные двигатели относятся к типу «безрамных» двигателей. Это означает, что двигатель не имеет корпуса, подшипников или устройства обратной связи. Эти компоненты могут быть выбраны производителем оборудования и оптимизированы в соответствии с требуемой производительностью или приобретены как часть сборки.
Моментные двигатели создают высокий крутящий момент на средних скоростях и даже в неподвижном состоянии. В отличие от традиционных приводов, определение размеров и выбор моментного двигателя основывается исключительно на крутящем моменте, а не на мощности.По сути, пиковый крутящий момент определяет максимальный крутящий момент, который двигатель физически создает, а непрерывный крутящий момент определяет величину крутящего момента, который двигатель может непрерывно выдавать. Рабочий цикл приложения будет определять зависимость от пикового или постоянного крутящего момента.
Зачем нужны моментные двигатели?
Моментные двигатели могут многое предложить инженерам. Они развернуты как часть нескольких критически важных высококлассных приложений, от исследования космоса до высокопроизводительных станков.Вот несколько причин, по которым они так популярны.
1. Сниженная стоимость владения
Прямое соединение полезной нагрузки с ротором устраняет необходимость в механических элементах трансмиссии, таких как редукторы, зубчатые ремни, редукторы скорости и червячные передачи. И, в отличие от щеточных роторных двигателей, между ротором и статором нет контакта; поэтому отсутствует механический износ, что обеспечивает отличную надежность и длительный срок службы. Меньшее количество механических деталей также сводит к минимуму техническое обслуживание и снижает стоимость системы.Технология прямого привода, присущая системе моментного двигателя, обеспечивает эффективную и эффективную безредукторную сборку.
2. Простая интеграция
Использование магнитов и ограниченный воздушный зазор приводит к получению большого полого вала или отверстия для легкой интеграции кабелей, охлаждающих трубок или другого оборудования, связанного с применением. Кольцевая конфигурация моментного двигателя сводит к минимуму объем, необходимый для монтажа. Это дает конструктору машины большую гибкость при выборе двигателя для работы с подшипниками, устройствами обратной связи и полезной нагрузкой.
Кольцевая конфигурация моментного двигателя сводит к минимуму объем, необходимый для монтажа. Это дает конструктору машины большую гибкость при выборе двигателя для работы с подшипниками, устройствами обратной связи и полезной нагрузкой.
3. Динамические характеристики
Динамические характеристики значительно улучшены за счет очень высокой полосы пропускания контура управления. Прямая связь нагрузки и обратной связи по положению с двигателем имеет то преимущество, что устраняет все явления, ограничивающие динамические характеристики машин без прямого привода. Устранение длительного дрейфа, эластичности и люфта является огромным преимуществом для производительности и срока службы машины. Применения моментных двигателей предъявляет широкий диапазон требований к динамическим характеристикам.В зависимости от специфики рабочего цикла системы пиковый крутящий момент, постоянный крутящий момент или и то, и другое будут определять выбор двигателя.
4. Широкий диапазон крутящего момента-скорости
Моментные двигатели с прямым приводом обеспечивают высокий крутящий момент в широком диапазоне скоростей, от состояния покоя или низкой скорости до высоких угловых скоростей. Хотя моментные двигатели могут достигать высоких скоростей (до 5450 об / мин), существует компромисс в крутящем моменте, поскольку двигатель становится ограниченным из-за увеличения потерь, зависящих от скорости. Характеристики крутящего момента двигателя во всем диапазоне скоростей показаны на его кривой крутящий момент / скорость.
Хотя моментные двигатели могут достигать высоких скоростей (до 5450 об / мин), существует компромисс в крутящем моменте, поскольку двигатель становится ограниченным из-за увеличения потерь, зависящих от скорости. Характеристики крутящего момента двигателя во всем диапазоне скоростей показаны на его кривой крутящий момент / скорость.
Семейство брендов HEIDENHAIN уже давно занимается разработкой технологии прямого привода. Благодаря многочисленным инновациям и запатентованным конструкциям мы продолжаем обеспечивать непревзойденную эффективность крутящего момента для наиболее оптимальной производительности.
Поделиться:
Основы определения размеров двигателя Часть 1: Момент нагрузки
Для правильного выбора двигателя необходимо выполнение трех критериев: крутящий момент, инерция нагрузки и скорость. В первой части этой серии статей об основах определения размеров двигателя я объясню, что такое крутящий момент нагрузки, как его рассчитать для конкретных примеров применения и как он соответствует требованиям к крутящему моменту для данного приложения.
Крутящий момент определяется как сила вращения на расстоянии от оси вращения. Он измеряется в таких единицах, как фунт-дюйм (фунт-дюйм) в британской системе мер или Нм (ньютон-метр) в метрической системе. Крутящий момент не менее важен, если не более важен, чем мощность двигателя. Лошадиная сила – это скорость, с которой работа может быть выполнена, и рассчитывается как крутящий момент, умноженный на скорость. Другими словами, крутящий момент – это способность выполнять работу, а мощность – это скорость, с которой работа может быть выполнена.
Крутящий момент состоит из двух основных компонентов: момента нагрузки и момента ускорения. Момент нагрузки – это величина крутящего момента, постоянно требуемая для приложения, включающая в себя фрикционную и гравитационную нагрузку. Момент ускорения – это крутящий момент, необходимый только для максимального ускорения и замедления нагрузки. Чем быстрее груз должен разогнаться, тем выше момент ускорения. Иногда момент нагрузки выше; иногда момент ускорения мог быть выше. Важно рассчитать и то, и другое; особенно для профилей быстрого движения.
Важно рассчитать и то, и другое; особенно для профилей быстрого движения.
На изображении выше мы показываем несколько стрелок, которые показывают направление сил, взаимодействующих в этом приложении.Как вы думаете, что такое момент нагрузки? Ответ – оба.
Момент нагрузки – это сумма нагрузок трения и гравитации. Сила тяжести определяется весом или массой x ускорением свободного падения ( г ). Сила трения, действующая в направлении, противоположном направлению движения конвейера, рассчитывается путем умножения массы груза на коэффициент трения двух поверхностей: м x µ .
Расчет момента нагрузки различается для разных приложений.Давайте рассмотрим несколько распространенных примеров, чтобы увидеть, как рассчитывается момент нагрузки.
Для приложения с приводом шкива расчет момента нагрузки довольно прост. Нам нужно создать силу на некотором расстоянии от вала двигателя (определение крутящего момента). Это можно рассчитать, умножив силу ( F ) на радиус вращения ( r ). Чтобы переместить нагрузку (синий прямоугольник), двигатель должен создавать крутящий момент, превышающий это значение.
Это можно рассчитать, умножив силу ( F ) на радиус вращения ( r ). Чтобы переместить нагрузку (синий прямоугольник), двигатель должен создавать крутящий момент, превышающий это значение.
Для расчета момента нагрузки умножьте силу ( F ) на расстояние от оси вращения, которое является радиусом шкива ( r ) . Если масса груза (синий прямоугольник) составляет 20 Ньютонов, а радиус шкива составляет 5 см, то требуемый крутящий момент для приложения составляет 20 Н x 0,05 м = 1 Нм. Обычно используется коэффициент безопасности, чтобы двигатель генерировал больший крутящий момент, чем требуется, чтобы учесть любые неточности в переменных, используемых для расчета.
Вот формула для расчета момента нагрузки для шкивного привода со всеми переменными: |
Приведенная выше формула подходит для приложений с нагрузкой трения или без нее. Если вы удалите трение из системы (коэффициент трения скользящей поверхности µ = 0; внешняя сила FA = 0; передаточное число i = 1), вы, по сути, получите ту же основную формулу силы ( F ) x радиус ( r ).
Если вы удалите трение из системы (коэффициент трения скользящей поверхности µ = 0; внешняя сила FA = 0; передаточное число i = 1), вы, по сути, получите ту же основную формулу силы ( F ) x радиус ( r ).
Теперь давайте попробуем применить эту концепцию в другом приложении, которое имеет дело с трением.
В конвейере, где груз поддерживается поверхностью, трение постоянно и пропорционально массе груза. Степень скольжения на контактной поверхности или коэффициент трения ( µ) , необходима для определения силы трения ( F ).
Следующая формула используется для расчета момента нагрузки для ременных передач (конвейеров), а также реечных и шестеренчатых передач. |
Для этого типа применения нам нужно сначала рассчитать силу ( F ), прежде чем мы сможем рассчитать момент нагрузки ( TL ). Это требует от нас определения переменных внешней силы ( FA ), массы ( м ) и угла наклона ( Θ ). Как только у нас будет значение F , мы можем подставить его в формулу момента нагрузки ( TL ).
Это требует от нас определения переменных внешней силы ( FA ), массы ( м ) и угла наклона ( Θ ). Как только у нас будет значение F , мы можем подставить его в формулу момента нагрузки ( TL ).
| Пример: поворотный индексный стол |
для поворотных столов используются те же формулы, что и для ременной передачи, но для определения необходимых переменных требуется несколько иной мыслительный процесс.В этом случае трение возникает в точках контакта шариковых роликов (опорных подшипников) и стола, поэтому радиус ( r ) будет расстоянием от центра вала двигателя до точки контакта между столом и его опорой. подшипники. Масса (м) будет массой стола плюс груз (ы). Коэффициент трения ( µ) обычно указывается в технических характеристиках подшипников.
СОВЕТ: Советы по выбору двигателя |
1. 2. Если вам нужно преобразовать единицы, убедитесь, что они преобразованы правильно; особенно десятичная точка. 3. Используйте соответствующий коэффициент (-и) безопасности. Вы бы предпочли увеличить размер двигателя, чем уменьшить его. 4. Полезно иметь еще один свежий взгляд, чтобы перепроверить свои расчеты. Сделайте жизнь проще. Используйте или. |
 Будьте осторожны, не смешивайте и не сопоставляйте британские и метрические единицы в одной формуле.
Будьте осторожны, не смешивайте и не сопоставляйте британские и метрические единицы в одной формуле.Однако момент нагрузки – это лишь одна из двух составляющих полного крутящего момента, необходимого для данного приложения.Для правильного выбора двигателя нам все еще необходимо рассчитать ускоряющий момент, инерцию нагрузки и скорость.
Следите за новостями, чтобы увидеть больше сообщений об основах определения размеров двигателя, когда я буду повторять каждый расчет.
Далее:
Моментные двигатели существуют по крайней мере с 1970 года, и, как и большинство серводвигателей той эпохи, они использовали двигатели со щетками. Однако поскольку серводвигатели приняли бесщеточную технологию, их примеру последовали и моментные двигатели, и теперь бесщеточные моментные двигатели доминируют на рынке.
Но наиболее очевидной особенностью моментных двигателей является то, что они имеют относительно большое отношение диаметра к длине и короткие осевые размеры.Кроме того, моментные двигатели могут иметь большой внешний и внутренний диаметр, в результате чего двигатель представляет собой чуть больше тонкого кольца. Таким образом, масса может быть довольно низкой в зависимости от диаметра. Большой диаметр помогает двигателю развивать высокий крутящий момент. Это дает двигателю большое плечо рычага для создания высокого уровня крутящего момента. Большой диаметр также обеспечивает достаточно места по окружности для мощных редкоземельных магнитов. Моментные двигатели также являются «бескаркасными» двигателями. Это означает, что у них нет корпусов, подшипников или устройств обратной связи. В этом смысле двигатель представляет собой комплект, который должен быть частью конструкции машины. Моментные двигатели могут поставляться с многоразовым сборочным приспособлением, называемым «мостом», который устанавливается на заводе для обеспечения совмещения ротора и статора при сборке. Мост также сохраняет магнитное поле внутри двигателя, тем самым устраняя необходимость в специальных участках для сборки из цветных металлов и предотвращая повреждение ротора металлическими отходами и ослабленными винтами. Моментные двигатели выполнены в виде прямых приводов. Они устраняют необходимость в коробках передач, червячных передачах и других элементах механической трансмиссии и напрямую связывают полезную нагрузку с приводом. Большой внутренний диаметр моментного двигателя может быть плюсом для станков.По сути, это большой полый вал, дающий разработчикам больше возможностей при установке двигателя. В большинстве случаев двигатели могут быть оптимально расположены относительно опорных подшипников, устройств обратной связи и полезной нагрузки. Это означает, что добавление двигателя не увеличивает движущуюся массу или инерцию. Моментные двигатели доступны в широком диапазоне размеров, с диаметром от менее 100 мм до более 2 м. Но 1,2 м обычно самый большой для станков.Диаметр двигателя аналогичен размеру корпуса обычных бесщеточных серводвигателей постоянного тока. Для заданного диаметра доступны несколько осевых длин. Это позволяет разработчикам выбирать из широкого диапазона размеров двигателя, чтобы удовлетворить требованиям по крутящему моменту. Моментные двигатели имеют относительно большое количество пар магнитных полюсов. Следовательно, на роторе много постоянных магнитов. Это означает, что моментные двигатели могут быть выполнены в виде тонких колец. Это также означает, что они могут иметь плавное регулирование скорости с низкой пульсацией.Однако потери на вихревые токи в бесщеточных двигателях увеличиваются с увеличением количества пар полюсов, что ограничивает максимальное практическое количество пар полюсов. В результате, моментные двигатели предназначены в первую очередь для низкоскоростных приложений, обычно ниже 1000 об / мин, что более чем достаточно для многих приложений. Моментные двигатели создают высокий крутящий момент при остановке и могут иметь высокую динамическую жесткость. Однако сам по себе двигатель не определяет динамическую жесткость или точность. Чтобы использовать все преимущества двигателей с прямым приводом, машина должна иметь необходимые стандарты точности и жесткости и использовать высокопроизводительную систему управления. Обратная связь и теплоВысокоточная обратная связь с высоким разрешением необходима для оптимальной работы прямых приводов. Поскольку нагрузки напрямую связаны с приводами, возможна более высокая точность. Но разрешение позиционирования также находится в прямой зависимости от разрешения обратной связи, поэтому для этого требуется оптический энкодер с большим количеством строк (обычно 9000 / об или более) и коэффициентом интерполяции с высоким разрешением. Разрешение системы обычно должно быть ниже 1 угловой секунды. Где не работают моментные двигатели Моментные двигатели являются прямыми приводами и не нуждаются в устройствах передачи энергии, таких как редукторы и редукторы. В некоторых случаях вместо моментных двигателей используются гидравлические двигатели. Во всех непрямых приводах используется больше деталей, они подвержены большему износу и требуют периодической смазки и технического обслуживания. Тем не менее, моментные двигатели никогда не заменят все альтернативные и традиционные подходы.
Важное различие между системами с прямым приводом и системами, приводимыми в действие обычными серводвигателями постоянного тока и редукторами, заключается в том, что моментные двигатели находятся внутри оси и являются частью машины.Это делает контроль тепла более важным. Обычные двигатели обычно устанавливаются в менее критических местах (например, на конце червячной передачи или звездочки), поэтому отвод тепла не является проблемой, и двигатели могут работать при более высоких температурах. Подбор и сравнение крутящих моментовОпределение размеров и выбор моментных двигателей аналогично определению размеров и выбору обычных бесщеточных серводвигателей постоянного тока.Но из-за тепловых соображений проектировщики должны обращать внимание на определенные факторы, связанные с тепловыделением, в первую очередь на тепловую мощность, рассеиваемую двигателем. Первым шагом при выборе двигателя является определение необходимого крутящего момента и скорости. Расчет среднеквадратичного крутящего момента позволяет разработчикам оценить рассеиваемую мощность и, как следствие, нагрев двигателя. Тепло, выделяемое двигателем, должно отводиться системой охлаждения, чтобы избежать перегрева элементов машины. При сравнении моментных двигателей инженеры полагаются на постоянную двигателя (K м Н-м / Вт). Он используется для оценки относительной эффективности двигателей различных производителей и показывает взаимосвязь между создаваемым крутящим моментом и результирующими потерями мощности. Двигатель с самым высоким значением K м является наиболее эффективным генератором крутящего момента. K m зависит от конструкции и конструкции двигателя. Он включает такие факторы, как эффективность упаковки обмоток, тип и конструкция пластин, а также конструкция электромагнитной цепи.Следовательно, это лучший индикатор производительности двигателя, чем постоянная крутящего момента K t (Н-м / А), которая связывает выходной крутящий момент с подаваемым током. K t полезен для согласования двигателей с сервоусилителями, но он не дает информации об эффективности. Моментные двигатели – это только один элемент в полной системе.
|

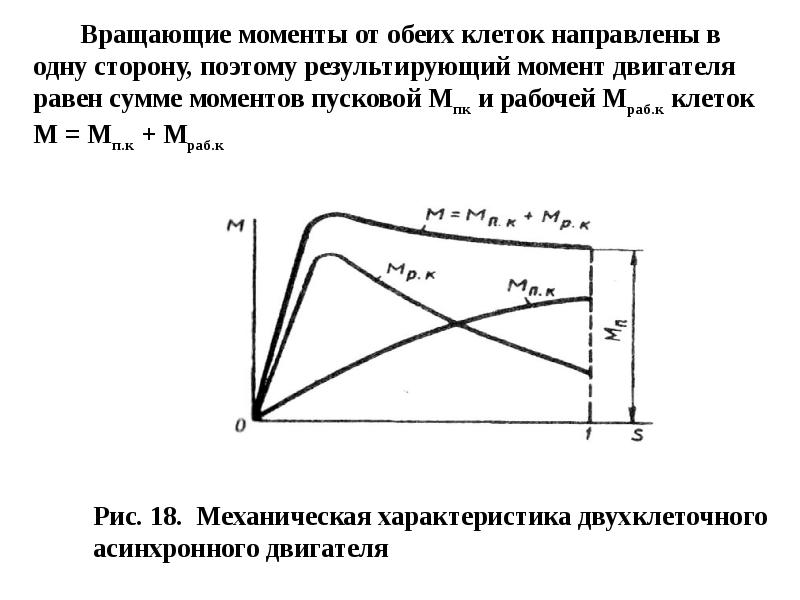 У них есть ряд преимуществ перед другими моторами. Например, у них:
У них есть ряд преимуществ перед другими моторами. Например, у них: В качестве крайнего примера, моментный двигатель для привода телескопа имеет диаметр 2.5 м и длиной всего 50 мм, при этом он по-прежнему обеспечивает постоянный крутящий момент более 10 000 Н · м.
В качестве крайнего примера, моментный двигатель для привода телескопа имеет диаметр 2.5 м и длиной всего 50 мм, при этом он по-прежнему обеспечивает постоянный крутящий момент более 10 000 Н · м. Это делает возможным приводы с высокими динамическими характеристиками и без гистерезиса. Угловая жесткость также может быть чрезвычайно высокой, порядка 100 Нм / угл.сек для двигателей с пиковым крутящим моментом 2500 Нм.
Это делает возможным приводы с высокими динамическими характеристиками и без гистерезиса. Угловая жесткость также может быть чрезвычайно высокой, порядка 100 Нм / угл.сек для двигателей с пиковым крутящим моментом 2500 Нм.

 И есть общие рекомендации по отказу от моментных приводов:
И есть общие рекомендации по отказу от моментных приводов: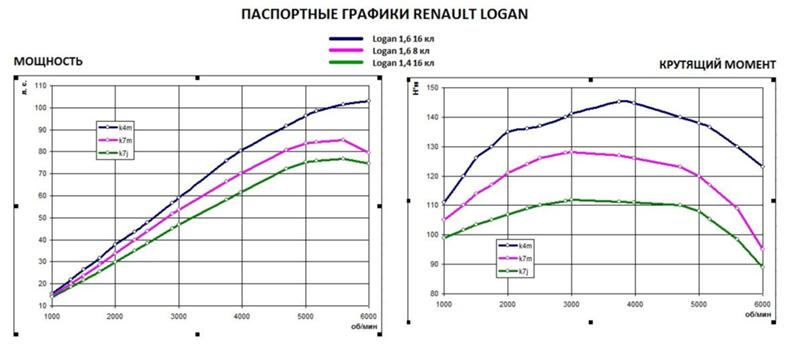 Но в большинстве моментных двигателей предусмотрено жидкостное охлаждение. Жидкостное охлаждение эффективно увеличивает номинальный постоянный крутящий момент двигателя. Воздушное охлаждение, хотя и является вариантом, гораздо менее эффективно, чем жидкостное охлаждение.
Но в большинстве моментных двигателей предусмотрено жидкостное охлаждение. Жидкостное охлаждение эффективно увеличивает номинальный постоянный крутящий момент двигателя. Воздушное охлаждение, хотя и является вариантом, гораздо менее эффективно, чем жидкостное охлаждение.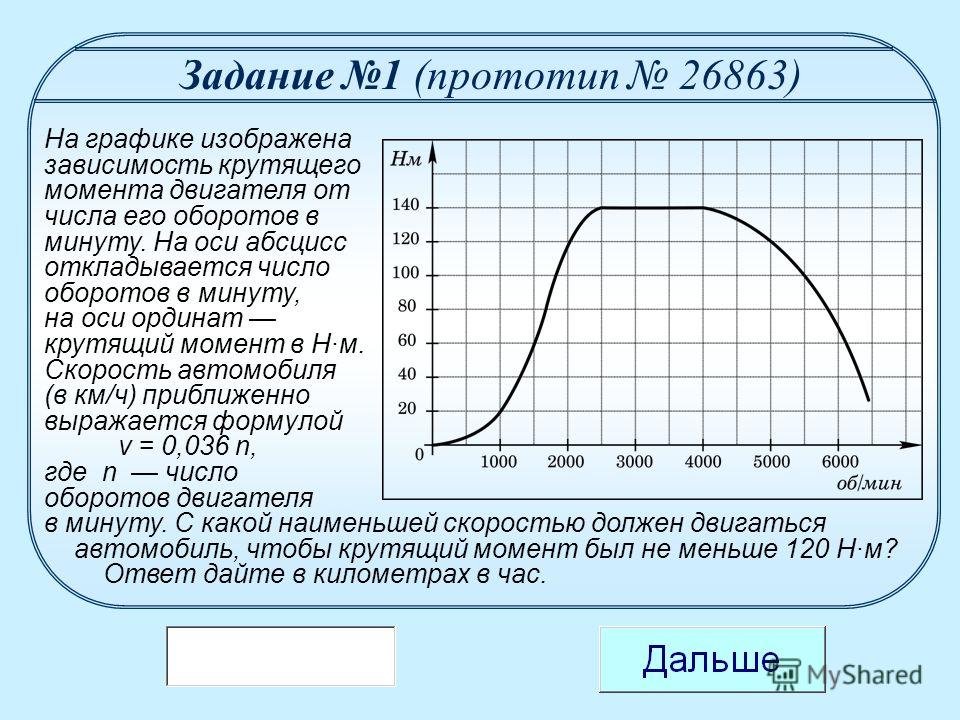
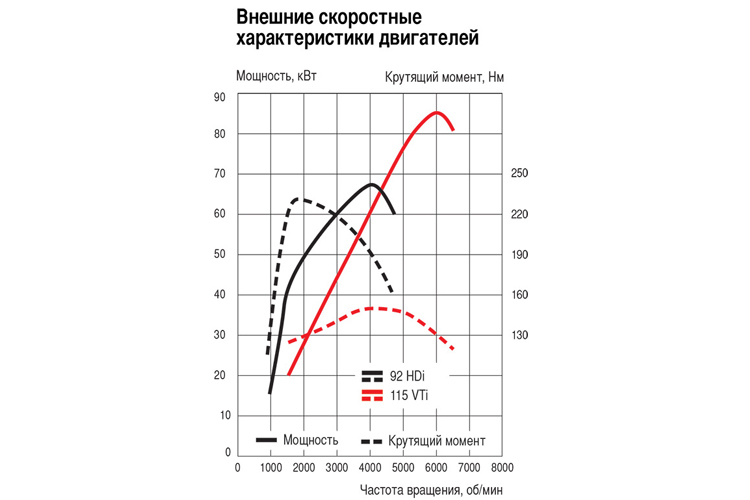 Он по-прежнему нуждается в механической конструкции с высокой жесткостью, подшипниками и устройством обратной связи. Именно общая интеграция этих элементов определяет производительность системы.
Он по-прежнему нуждается в механической конструкции с высокой жесткостью, подшипниками и устройством обратной связи. Именно общая интеграция этих элементов определяет производительность системы. сек
секПочему иногда не удается достичь 100% крутящего момента двигателя, когда уже крутится
Иногда вы хотите установить 100% крутящий момент, но не можете его достичь.Обычно когда мотор уже крутится. Почему?
То, что вы читаете как фактическое значение крутящего момента, на самом деле представляет собой ток, считанный на двигателе , умноженный на коэффициент (чувствительность крутящего момента или постоянная крутящего момента), который мы считаем линейным и постоянным.
Причины, по которым фактический крутящий момент НЕ является реальным крутящим моментом:
- Если коммутация, фазировка не правильные, важной частью тока является не полезный крутящий момент, а просто возникают электрические и магнитные потери.

- Если токовая петля неправильно сконфигурирована или нестабильна, ток будет выше, а при наличии пульсаций реальный «полезный механический крутящий момент» будет действительно ниже.
- Постоянная крутящего момента может изменяться в зависимости от нескольких факторов, таких как конструкция двигателя, температура магнитов (что влияет на его магнитные свойства).
Однако это решение является хорошим и практическим приближением. И экономит дорогие измерители крутящего момента или тензодатчики.
Иногда после разгона не удается достичь максимального крутящего момента.Причина в том, что независимо от того, насколько токовая петля хочет увеличить ток (пропорционально крутящему моменту) за счет увеличения рабочего цикла ШИМ силового каскада, Vmotor слишком близок к Vbemf, и, следовательно, ток не может увеличиться больше .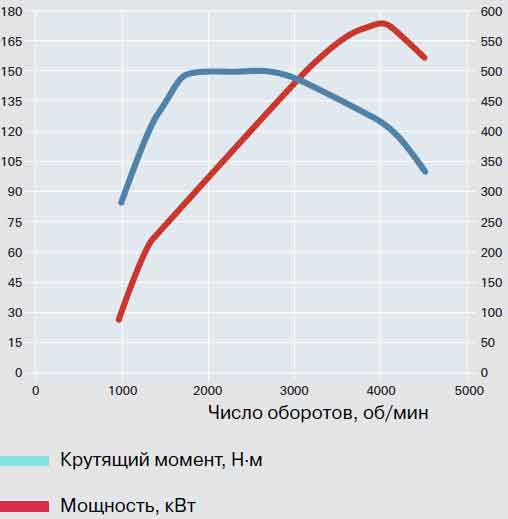
Каждый раз, когда момент трения + дополнительные нагрузки = крутящий момент двигателя, нагрузка остается в равновесии (не перемещается или движется с постоянной скоростью). Когда момент трения + дополнительные нагрузки <крутящий момент двигателя, нагрузка ускоряется (крутящий момент двигателя - момент трения - дополнительные нагрузки = момент ускорения> 0).На высоких скоростях BEMF настолько близок к Vbus, что применимый крутящий момент двигателя ограничивается. Тогда, чем больше момент трения + дополнительная нагрузка, тем меньше становится момент ускорения.
Это также может произойти, если ускорение или скорость по какой-то причине ограничены.
Эта ситуация не возникает в начале ускорения, потому что большая часть крутящего момента используется для увеличения кинетической энергии нагрузки (и двигателя). Но когда скорость уже высока и не применяется дополнительная нагрузка, увеличить крутящий момент невозможно.
Максимально достижимый крутящий момент в зависимости от скорости двигателя.

Пересчитайте это значение на основе параметров вашего двигателя.
Увеличьте напряжение шины постоянного тока.
Безграничное ускорение системы.
Используйте двигатель с меньшим сопротивлением и меньшей обратной ЭДС.
Компенсация дроссельной заслонки с электроприводом
Эта ситуация создает неприятное ощущение, что на высоких оборотах дроссельная заслонка работает некорректно .
Пользователь чувствует, что отпускание дроссельной заслонки не снижает усилия двигателя!
Предлагаемое решение – добавить ограничение требования крутящего момента на основе скорости .
- Улучшит ощущение пользователя при отпускании тормоза, когда транспортное средство уже разогнано.
- Ограничит максимальную скорость автомобиля (безопасность)
Мощность двигателя и крутящий момент в сравнении с частотой частотно-регулируемого привода
Мой январь 2013 г. Pumps & Systems В колонке основное внимание уделялось снижению мощности двигателя (л.с.) по мере уменьшения частоты с помощью частотно-регулируемого привода (VFD).У меня было несколько просьб вернуться к этой теме и объяснить взаимосвязь между мощностью и крутящим моментом в широком диапазоне частот.
Pumps & Systems В колонке основное внимание уделялось снижению мощности двигателя (л.с.) по мере уменьшения частоты с помощью частотно-регулируемого привода (VFD).У меня было несколько просьб вернуться к этой теме и объяснить взаимосвязь между мощностью и крутящим моментом в широком диапазоне частот.
Взаимосвязь между мощностью и крутящим моментом
Взаимосвязь между мощностью и крутящим моментом, создаваемым электродвигателем, может вызывать некоторое недоумение. Когда этот двигатель управляется частотно-регулируемым приводом, это может сбивать с толку.
В линейной среде работа – это произведение силы, приложенной к объекту, и расстояния, которое объект проходит под действием этой силы:
w = fd
Во вращающейся среде крутящий момент эквивалентен работе, но его значение немного сложнее.Крутящий момент равен приложенной силе, его расстоянию от оси вращения (радиус) и углу (θ) приложения силы:
t = f (r sin θ)
В США крутящий момент выражается в фунт-футах (фунт-фут). Когда я учился в школе, это были фут-фунты (фут-фунты), и я до сих пор использую старое значение. Крутящий момент показывает, сколько работы было выполнено, но не показывает, насколько быстро эта работа завершена.
Когда я учился в школе, это были фут-фунты (фут-фунты), и я до сих пор использую старое значение. Крутящий момент показывает, сколько работы было выполнено, но не показывает, насколько быстро эта работа завершена.
Мощность – скорость, с которой выполняется крутящий момент (работа):
p = t / время
В U.С., мы используем HP как единицу мощности. Два приведенных ниже уравнения показывают соотношение л.с. и крутящего момента при изменении скорости двигателя. Константа 5 252 является результатом деления исходных данных теста Джеймса Ватта (33 000) на 2 пи (π).
л.с. = (t x об / мин) / 5,252
t = (л.с. x 5252) / об / мин
Основываясь на соотношении, крутящий момент должен удвоиться, если HP должна оставаться постоянной при уменьшении скорости вдвое. Чтобы обеспечить такую же мощность на более низкой скорости, двигатель должен выполнять вдвое больше работы за оборот, что требует вдвое большего крутящего момента. Вот почему вал и рама двигателя на 900 об / мин обычно больше, чем у двигателя с частотой вращения 1800 об / мин той же мощности.
Вот почему вал и рама двигателя на 900 об / мин обычно больше, чем у двигателя с частотой вращения 1800 об / мин той же мощности.
Введение в частотно-регулируемый привод
Когда скорость двигателя переменного тока регулируется частотно-регулируемым приводом, мощность или крутящий момент будут изменяться в зависимости от изменения частоты. На рисунке 1 представлена графическая иллюстрация этих изменений. Ось X – скорость двигателя от 0 до 120 герц. Ось Y – процент мощности и крутящего момента. При 60 Гц (базовая скорость двигателя) и мощность, и крутящий момент равны 100 процентам.Когда частотно-регулируемый привод снижает частоту и скорость двигателя, он также снижает напряжение для поддержания постоянного отношения вольт / герц. Крутящий момент остается на уровне 100 процентов, но HP уменьшается прямо пропорционально изменению скорости.
При частоте 30 Гц значение HP составляет всего 50 процентов от HP при частоте 60 Гц. Причина этого в том, что общий крутящий момент, создаваемый за единицу времени, также уменьшается на 50 процентов из-за меньшего количества оборотов двигателя. Вы можете использовать уравнения HP и крутящего момента, чтобы проверить эту взаимосвязь.
Причина этого в том, что общий крутящий момент, создаваемый за единицу времени, также уменьшается на 50 процентов из-за меньшего количества оборотов двигателя. Вы можете использовать уравнения HP и крутящего момента, чтобы проверить эту взаимосвязь.
Рисунок 1. Изменение мощности и крутящего момента с разными частотами
Когда VFD увеличивает частоту выше 60 Гц, мощность и крутящий момент полностью переключаются. HP остается на уровне 100 процентов, а крутящий момент уменьшается с увеличением частоты. Снижение крутящего момента происходит из-за того, что полное сопротивление двигателя увеличивается с увеличением частоты. Поскольку частотно-регулируемый привод не может увеличить напряжение выше напряжения питания, ток уменьшается с увеличением частоты, уменьшая доступный крутящий момент.
Теоретически крутящий момент уменьшается пропорционально отношению базовой скорости к более высокой скорости (60 герц / 90 герц = 67 процентов). В реальных приложениях другие факторы могут снизить фактический имеющийся крутящий момент значительно ниже теоретических значений, показанных на рисунке 1. К ним относятся повышенное трение в подшипниках, повышенная нагрузка вентилятора и дополнительная нагрузка на ротор. Крутящий момент двигателя при полной нагрузке должен быть снижен при работе на скоростях выше 60 герц. Типичные рекомендации производителей по снижению номинальных характеристик предлагают использовать отношение базовой частоты к максимальной частоте для скоростей до 90 герц.На скоростях выше 90 Гц часто используется квадрат отношения.
В реальных приложениях другие факторы могут снизить фактический имеющийся крутящий момент значительно ниже теоретических значений, показанных на рисунке 1. К ним относятся повышенное трение в подшипниках, повышенная нагрузка вентилятора и дополнительная нагрузка на ротор. Крутящий момент двигателя при полной нагрузке должен быть снижен при работе на скоростях выше 60 герц. Типичные рекомендации производителей по снижению номинальных характеристик предлагают использовать отношение базовой частоты к максимальной частоте для скоростей до 90 герц.На скоростях выше 90 Гц часто используется квадрат отношения.
Конечным пользователям следует проконсультироваться со своим производителем, прежде чем эксплуатировать двигатель со скоростью, превышающей его базовую. Типичные проблемы – баланс ротора, срок службы подшипников и критическая скорость. Высококачественные двигатели с частотой вращения 1800 и 1200 об / мин мощностью до 200 л.с. должны без проблем работать с частотой вращения, в два раза превышающей базовую. Превышение скорости обычно не допускается на двигателях с частотой вращения 3600 об / мин и мощностью более 50 л.с. Национальная ассоциация производителей электрооборудования (NEMA) MG1 предоставляет несколько рекомендаций по превышению скорости, которым должны соответствовать производители.
Превышение скорости обычно не допускается на двигателях с частотой вращения 3600 об / мин и мощностью более 50 л.с. Национальная ассоциация производителей электрооборудования (NEMA) MG1 предоставляет несколько рекомендаций по превышению скорости, которым должны соответствовать производители.
Вы когда-нибудь совершали ошибку, управляя 230-вольтовым двигателем на 460-вольтовом? Если да, то вы, вероятно, заметили в комнате много дыма. Однако есть приложения, в которых это действительно может работать. Новым способом обеспечения постоянного крутящего момента на скоростях, превышающих базовую, является запуск двигателя на 230 В на частотно-регулируемом приводе на 460 В. В этих приложениях привод запрограммирован на обеспечение полного напряжения с частотой 120 Гц, а затем снижает напряжение пропорционально уменьшению скорости. При 90 Гц выходное напряжение будет 345 вольт, а при 60 Гц оно будет соответствовать напряжению, указанному на паспортной табличке двигателя (230 вольт).