
Генератор квадратурного сигнала | Техника и Программы
December 26, 2011 by admin Комментировать »На рис. 12.5 приведена интересная схема генератора синусоидальных сигналов с малыми искажениями (<0,1 %), которая обеспечивает на выходе два одинаковых сигнала, сдвинутых по фазе на 90° один относительно другого. Он используется в биквадратном фильтре (аналоговом компьютере), изображенном на рис. 11.55, который имитирует резонансную систему. Основу схемы составляют два интегратора, соединенные обратной связью через инвертор с единичным усилением. При верхнем положении скользящего контакта потенциометров Rla и Ru колебания будут иметь место на частоте, при которой каждый интегратор имеет единичный коэффициент усиления, то есть на частоте, где 1/coRC = 1 (в этой схеме R3 = R5 = R и С = С = С). Потенциометры R]a и Rn
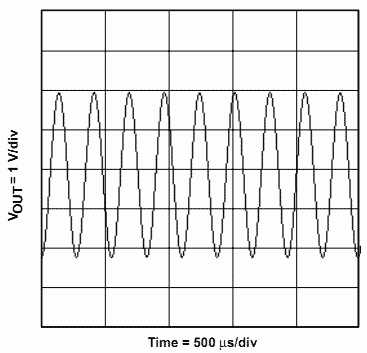
Рис. 12.5. Генератор синусоидальных сигналов с двумя квадратурными выходными сигналами одинаковой амплитуды.
ных потенциометрах с перемещением подвижного контакта по окружности путем вращения. Для изменения частоты на декаду можно переключать пары конденсаторов.
Чтобы обеспечить быстрый запуск генератора при включении схемы, применяется резистор Rj с сопротивлением 4,7 МОм, создающий небольшое «отрицательное демпфирование». Ограничение амплитуды обеспечивается стабилитронами Dj и D2 и делителем R8 — Rt), которые вносят положительное демпфирование, когда амплитуда выходного сигнала становится больше величины порядка 4 В. Оба выхода (1) и (2) дают очень устойчивый сигнал с удвоенной амплитудой 8 В. Из-за наличия интегратора между двумя выходами разность фаз между сигналами на этих выходах получается равной 90°. Если выбрать соответствующие емкости С х и С2, то схема будет хорошо работать на частотах вплоть до 0,1 Гц. Когда выходы генератора соединены со входами осциллографа Хи Y, на экране наблюдается фигура Лиссажу в виде точной окружности; это особенно эффектно проявляется на низких частотах, когда на экране хорошо видно пятно, медленно описывающее окружность. На основе этой схемы можно смоделировать экран радиолокатора.
Литература: М.Х.Джонс, Электроника — практический курс Москва: Техносфера, 2006. – 512с. ISBN 5-94836-086-5
nauchebe.net
5.16. Квадратные генераторы
Активные фильтры и генераторы
Генераторы
Время от времени возникает потребность в генераторах, которые формируют одновременно пару одинаковых по амплитуде колебаний синусоидальной формы, но сдвинутых по фазе на 90°. Эту пару сигналов можно рассматривать как синусоидальное и косинусоидальное колебания, мы же будем придерживаться термина квадратурная пара сигналов (сигналы «в квадратуре»). Наиболее важны такие сигналы в радиосвязи квадратурные смесители, схемы формирования однополосных сигналов). Кроме того, дальше будет показано, что такая квадратурная пара сигналов всегда необходима для формирования сигнала с любой произвольной фазой.
Первая мысль, которая сразу возникает, – это как подавать сигнал синусоидальной формы на интегратор (или дифференциатор), чтобы на его выходе появился сдвинутый на 90° сигнал косинусоидальной формы. При этом сигнал имеет правильный фазовый сдвиг, но его амплитуда испорчена (поймите почему). Далее предлагаются некоторые способы решения этой задачи.
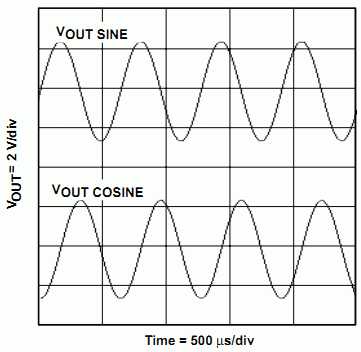
Резонатор на переключаемых конденсаторах. На рис. 5.38 показан способ пользования ИС фильтра на переключаемых конденсаторах MF5 в режиме самовозбуждающегося полосового фильтра. который формирует пару квадратурных сигналов синусоидальной формы. Наиболее простой способ понять ее работу – это предположить, что на выходе уже присутствует сигнал синусоидальной формы; далее компаратор преобразует его в прямоугольное колебание с небольшой амплитудой (падение напряжения на одном диоде) – которое снова подается на вход фильтра. Фильтр обладает узкой полосой пропускания (Q = 10) так что он преобразует прямоугольное колебание в выходной синусоидальный сигнал и таким образом поддерживается генерация. Входное прямоугольное колебание тактовой частоты (такт) задает пентральную частоту полосы пропускания, следовательно, сама частота генерации в этом случае составит ƒтакт/100. Эта схема пригодна для работы в диапазоне частот от нескольких герц до приблизительно 10 кГц и формирует вадратурную пару синусоидальных сигналов с равными амплитудами. Следует отметить, что эта схема дает «ступенчатую» аппроксимацию синусоидальной формы выходного сигнала вследствие того, что переключаемый фильтр дает квантованный выходной сигнал.
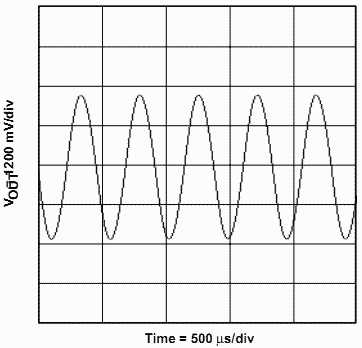
Рис. 5.38. Квадратурный генератор на переключаемых конденсаторах.
Генератор колебаний специальной формы (аналоговые тригонометрические функции). Фирма Analog Devices изготовляет интересную нелинейную «функциональную ИС», которая преобразует входное напряжение в выходной сигнал, пропорциональный sin(AUвх), где коэффициент усиления А имеет фиксированное значение, равное 50°/В. Как правило, этот кристалл (AD639) может на самом деле выполнять гораздо больше функций. Он вырабатывает четыре выходных сигнала, называемые Х1, Х2
, Y1 и Y2, и формирует выходной сигнал, напряжение которого определяется следующим образом: Uвых = sin(X1 – X2)/sin(Y1 – Y2). Таким образом, если например, установить Х1 = Y1 = 90° (т.е. +1,8 В), Y2 = 0 (закоротка на «землю»), а входное напряжение подавать на вход Х2, то вырабатывается сигнал вида cos(Х2).Упражнение 5.10. Докажите последнее утверждение.
У схемы AD639 имеется также выход прецизионного опорного напряжения +1.8В, что существенно облегчает ее применение. Следовательно, если на пару ИС AD639 подать треугольное колебание с амплитудой 1,8В, то можно получить пару квадратурных сигналов синусоидальной формы, как это показано на рис. 5.39. Рабочий диапазон частот этой ИС лежит в пределах от постоянного тока до приблизительно 1 МГц.
Рис. 5.39. Генератор тригонометрических функций.
Просмотровая таблица (поиск элементов при помощи просмотра). Это цифровая методика, которую вы полностью освоите только после изучения гл. 9. Основная идея состоит в том, чтобы запрограммировать цифровую память большого объема цифровыми значениями (выборками) синуса и косинуса, аргументы которых выбираются через равноотстоящие угловые промежутки (скажем, через 1). Тогда, быстро последовательно перебирая адреса этой памяти, можно получить колебание синусоидальной формы, для этого считанные из памяти по каждому адресу цифровые значения (т е. для последовательности угловых аргументов) подаются на пару цифро-аналоговых преобразователей (ЦАП).
Этот метод имеет следующие недостатаки. Как и в случае резонатора на переключаемых конденсаторах выходной сигнал имеет ступенчатую форму, поскольку он формируется из набора дискретных напряжений, по одному на содержимое каждой ячейки памяти. Можно, конечно, для сглаживания выходного сигнала поставить фильтр нижних частот, но, делая это, нельзя перекрыть широкий диапазон частот поскольку нужно выбирать такой фильтр нижних частот, чтобы он пропускал само синусоидальное колебание и в то же время подавлял более высокую частоту выборки (такая же проблема характерна и для резонатора на переключаемых конденсаторах). В этом случае помогает сокращение углового интервала между соседними значениями, но тогда соответственно снижается максимальная частота вырабатываемого выходного колебания. При использовании стандартных ЦАП с временем преобразования не более одной микросекунды, можно получить синусоидальные сигналы с частотами вплоть до нескольких десятков килогерц, полагая, что шаг углового аргумента составляет порядка одного градуса. Для самих же ЦАП характерно наличие в момент переключения больших остроконечных выбросов напряжения («кратковременная импульсная помеха»). Эти полноразрядные кратковременные импульсные помехи возникают даже, если переключение происходит между смежными (ближайшими) уровнями выходного напряжения! В гл. 9 будут предложены способы решения этой проблемы. Разрядность имеющихся в распоряжении ЦАП достигает 16 (в этом случае разрешающая способность составляет единицу из 65536 значений).
Генератор на основе метода переменных состояния. Все предложенные ранее методы требуют выполнения некоторой тяжелой работы. К счастью, сотрудники дружественной фирмы Burr-Brown провели эту работу дома и вышли на рынок с моделью 4423, которая представляет собой «прецизионный квадратурный генератор». В нем используется стандартная схема полосового фильтра на основе метода переменных состояния, выполненная на трех ОУ (рис. 5.18), где выходной сигнал через диодный ограничитель подается на вход (см. рис. 5.40). Она предназначена для работы в диапазоне частот от 0,002 Гц до 20 кГц и при этом она демонстрирует высокую стабильность фазового сдвига, амплитуды и частоты (максимально 10-4 1/°С). Схема 4432 является модульной (а не монолитной ИС) и выпускается в 14 – выводном стандартном DIP – корпусе при цене 24 долл. в малых партиях.
Рис. 5.40.
Фильтры на схеме с упорядоченными фазовыми сдвигами. Известны изощренные схемы RС-фильтров, которые обладают способностью при подаче на их вход сигнала синусоидальной формы формировать на выходе пару синусоидальных сигналов, имеющих разность фаз приблизительно 90°. В радиотехнике это называется «фазовым» методом формирования однополосного сигнала (благодаря Weaver), где предназначенный для передачи входной сигнал состоит из сигналов речевого диапазона.
К сожалению, этот метод работает удовлетворительно только в ограниченном диапазоне частот и требует точного подбора номиналов резисторов и конденсаторов. Более приемлемый способ формирования широкополосных квадратурных сигналов основан на использовании «цепи с упорядоченными фазовыми сдвигами», которая представляет собой регулярную структуру, состоящую из резисторов с равными номиналами, а номиналы конденсаторов уменьшаются в геометрической прогрессии, как это указано на рис. 5.41. На вход этой цепи подаются два сигнала, а именно прямой и сдвинутый на 180° (это легко сделать с помощью инвертора с единичным коэффициентом передачи). Выходной сигнал представляет собой набор из четырех квадратурных сигналов и при использовании 6-секционной цепи их погрешность составляет ±0,5° в диапазоне частот 100:1.
Рис. 5.41. Цепь с упорядоченными фазовыми сдвигами.
Квадратурные колебания прямоугольной формы. В некоторых случаях формирование квадратурных сигналов прямоугольной формы является несложной задачей. Основная идея заключается в том, чтобы сформировать сигнал удвоенной частоты, затем поделить его в два раза с помощью цифрового триггера (гл. 8) и декодировать на вентилях (снова гл. 8). Это наиболее совершенный способ формирования квадратурных прямоугольных колебаний в диапазоне частот от постоянного тока до по крайней мере 100 МГц.
Квадратурные сигналы диапазона радиочастот. В диапазоне радиочастот (выше нескольких мегагерц) формирование пары квадратурных сигналов синусоидальной формы снова достаточно тривиальная задача; в этом случае используются приборы, которые называются квадратурными гибридными схемами (или квадратурные расщепитель/объединитель). На низкочастотной границе радиочастотного диапазона (от нескольких мегагерц до, может бить, 1 ГГц) они принимают форму небольших трансформаторов с магнитным сердечником, в то время как на более высоких частотах нужно найти их воплощение в форме полосковых линий передачи (полоски и печатные проводники, изолированные от заземленной подложки) или световодов (полая прямоугольная трубка). Эти вопросы снова будут рассмотрены в гл. 13. Методика достаточно узкополосная, типовая ширина рабочей частоты не превышает октаву (т. е. соотношение частот 2.1).
Формирование синусоидального колебания с произвольной фазой. Поскольку у нас уже имеется пара квадратурных сигналов, достаточно просто сформировать синусоидальное колебание с произвольной фазой. В этом случае требуется просто объявить синфазный (I) и квадратурные сигналы (Q) на резистивном сумматоре, что наиболее просто реализуется с помощью потенциометра, включенного между I и Q сигналами. При вращении движка потенциометра эти сигналы (I и Q) суммируются в различных соотношениях при этом удается получить плавное изменение фазы в диапазоне от 0 до 90°. Если же рассматривать эту проблему с точки зрения векторов, то можно показать, что фаза результирующего колебания совершенно не зависит от частоты; однако его амплитуда при регулировке фазы меняется, спадая на 3 дБ при фазе 45°. Метод достаточно просто можно распространить и на случай формирования колебания, фаза которого должна лежать в диапазоне от 0 до 360°, при этом используются противоположные сигналы (фазовый сдвиг 180°) I’ и Q’ которые получаются с помощью инвертирующих усилителей с коэффициентом передачи -1.
Схемы, не требующие пояснении
skilldiagram.com
Управляемый генератор квадратурных сигналов
Изобретение относится к радиотехнике и связи и может быть использовано при построении управляемых генераторов. Техническим результатом является повышение спектральной чистоты формируемых квадратурных гармонических сигналов. Устройство содержит два умножителя, два интегратора, два квадратора, два сумматора, инвертор, два делителя, блок извлечения квадратного корня, компаратор, источник опорного напряжения. 3 ил.
Изобретение относится к радиотехнике и связи и может быть использовано при построении управляемых генераторов.
Известен генератор [1 (с. 202 – рис. 4-16. «Электронный генератор с ограничением амплитуды колебаний»)], содержащий два интегратора, сумматор, нелинейный элемент (с релейной характеристикой) и два пассивных управляемых делителя, осуществляющих перестройку выходных колебаний по частоте. На выходе нелинейного элемента формируются биполярные импульсы прямоугольной формы с высоким содержанием высших нечетных гармоник. Биполярный прямоугольный сигнал подается по цепи обратной связи непосредственно на вход сумматора, поэтому на выходе первого интегратора будет сформирован сигнал, имеющий значительные нелинейные искажения.
Известен управляемый генератор [2 (с. 17 – рис. 1-9.)], который содержит два интегратора, два умножителя, нелинейный элемент и сумматор, к выходу которого подключен первый умножитель, управляющий вход которого соединен с управляющей шиной и управляющим входом второго умножителя, между выходом которого и первым входом сумматора включен второй интегратор, выход которого соединен со вторым выходом управляемого генератора, первый выход которого подключен к выходу первого интегратора, при этом нелинейный элемент включен между первым выходом управляемого генератора и вторым входом сумматора, а вход второго умножителя подключен к выходу первого интегратора.
Для стабилизации амплитуды используется нелинейный элемент, при этом коэффициент гармоник и стабильность амплитуды связаны обратной зависимостью, то есть уменьшение коэффициента гармоник за счет уменьшения степени нелинейности приводит к снижению стабильности амплитуды и, напротив, увеличение стабильности амплитуды ведет к увеличению гармоник в выходном сигнале. Сравнительно невысокие метрологические характеристики (стабильность амплитуды 1-2% при коэффициенте гармоник 0,5-1%) ограничивают применение таких генераторов [2 (с. 19)].
Наиболее близким устройством к заявленному изобретению по совокупности существенных признаков является, принятый за прототип, управляемый генератор [3], содержащий два интегратора, три умножителя, три квадратора, релейный элемент, ограничитель, два сумматора и инвертор, включенный между выходом третьего квадратора и третьим входом второго сумматора, выход которого соединен со вторым входом третьего умножителя, между выходом которого и первым входом первого сумматора включен ограничитель, при этом первый интегратор включен между выходом первого умножителя и первым входом второго умножителя, к выходу которого подключен вход второго интегратора, выход которого соединен со вторым входом первого сумматора, к выходу которого подключен первый вход первого умножителя, второй вход которого соединен со вторым входом второго умножителя и первой шиной управляемого генератора, вторая шина которого соединена с входом третьего квадратора, причем выходы первого и второго интеграторов соединены с соответствующими выходами управляемого генератора, первый квадратор включен между первым выходом управляемого генератора и первым входом второго сумматора, второй квадратор включен между вторым выходом управляемого генератора и вторым входом второго сумматора, а релейный элемент включен между первым выходом управляемого генератора и первым входом третьего умножителя.
На первом выходе генератора коэффициент нелинейных искажений превышает 0,05%, что не позволяет отнести данное устройство к прецизионным генераторам по данному показателю.
Задачей, на решение которой направлено изобретение, является повышение спектральной чистоты формируемых квадратурных гармонических сигналов.
Технический результат, достигаемый при осуществлении изобретения, заключается в повышении спектральной чистоты формируемых квадратурных гармонических сигналов путем введения дополнительных элементов и организации новых функциональных связей между элементами.
Указанный технический результат при осуществлении изобретения достигается тем, что в управляемый генератор квадратурных сигналов, содержащий первый и второй умножители, первый и второй интеграторы, первый и второй квадраторы, первый и второй сумматоры и инвертор, при этом первый квадратор включен между выходом первого интегратора и первым входом второго сумматора, второй квадратор 6 включен между выходом второго интегратора и вторым входом второго сумматора, к выходу первого сумматора подключен первый вход первого умножителя, выход которого соединен с входом первого интегратора, к выходу которого подключен первый вход второго умножителя, выход которого соединен с входом второго интегратора, выход которого соединен со вторым входом первого сумматора, при этом вторые входы первого и второго умножителей соединены с управляющей шиной, в него дополнительно введены первый и второй делители, блок извлечения квадратного корня, компаратор, и источник опорного напряжения, минусовой зажим которого соединен с общей шиной, а плюсовой – с инвертирующим входом компаратора, выход которого соединен с четвертым входом первого сумматора и третьим входом второго сумматора, между выходом которого и неинвертирующим входом компаратора включен блок извлечения квадратного корня, при этом инвертор включен между выходом первого интегратора и третьим входом первого сумматора, первый вход которого соединен выходом первого делителя и первым выходом управляемого генератора квадратурных сигналов, второй выход которого соединен с выходом второго делителя, первый вход которого подключен к выходу второго интегратора, причем выход блока извлечения квадратного корня соединен со вторыми входами первого и второго делителей, а первый вход первого делителя подключен к выходу первого интегратора.
Проведенный заявителем анализ уровня техники, включающий поиск по патентным и научно-техническим источникам информации, позволил установить, что заявитель не обнаружил аналог, характеризующийся признаками, тождественными всем существенным признакам заявленного изобретения. Следовательно, заявленное изобретение соответствует условию «новизна».
Введение в предлагаемый управляемый генератор квадратурных сигналов двух делителей, блока извлечения квадратного корня, компаратора и источника опорного напряжения, а также организация новых функциональных связей между элементами позволили повысить спектральную чистоту формируемых квадратурных гармонических сигналов.
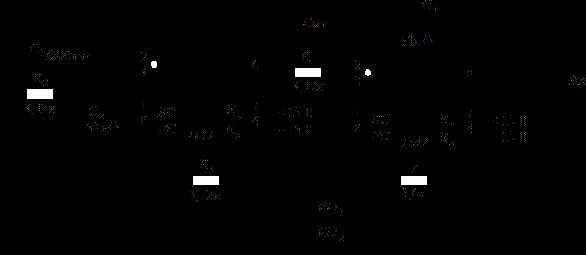
Изобретение поясняется структурной схемой управляемого генератора квадратурных сигналов, изображенной на фиг. 1, и графиками, поясняющими принцип работы управляемого генератора квадратурных сигналов – на фиг. 2 и фиг. 3.
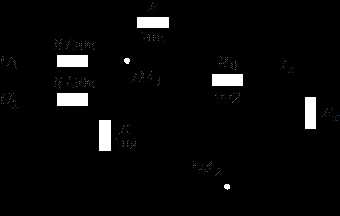
Управляемый генератор квадратурных сигналов содержит (фиг. 1) первый 1 и второй 2 умножители, первый 3 и второй интеграторы 4, первый 5 и второй 6 квадраторы, первый 7 и второй 8 сумматоры, инвертор 9, первый 10 и второй 11 делители, блок извлечения квадратного корня 12, компаратор 13 и источник опорного напряжения 14, минусовой зажим которого соединен с общей шиной, а плюсовой – с инвертирующим входом компаратора 13, выход которого соединен с четвертым входом первого сумматора 7 и третьим входом второго сумматора 8, между выходом которого и неинвертирующим входом компаратора 13 включен блок извлечения квадратного корня 12, при этом первый квадратор 5 включен между выходом первого интегратора 3 и первым входом второго сумматора 8, второй квадратор 6 включен между выходом второго интегратора 4 и вторым входом второго сумматора 8, а инвертор включен между выходом первого интегратора 3 и третьим входом первого сумматора 7, к выходу которого подключен первый вход первого умножителя 1, между выходом которого и первым входом второго умножителя 2 включен первый интегратор 3, причем выход блока извлечения квадратного корня 12 соединен со вторыми входами первого 10 и второго 11 делителей, шина управления соединена со вторым входом первого умножителя 1 и вторым входом второго умножителя 2, к выходу которого подключен вход второго интегратора 4, выход которого соединен со вторым входом первого сумматора 7, первый вход которого соединен с выходом первого делителя и первым выходом управляемого генератора квадратурных колебаний, второй выход которого соединен с выходом второго делителя 11, первый вход которого подключен к выходу второго интегратора 4, а первый вход первого делителя соединен с выходом первого интегратора 3.
Управляемый генератор квадратурных сигналов работает следующим образом.
Первый умножитель 1 и первый интегратор 3 образуют (фиг. 1) первый управляемый интегратор с передаточной функцией
где τУ1=τ1/(m1·EУ) – постоянная времени первого управляемого интегратора; τ1 – постоянная времени первого интегратора 3; m1 – масштабный коэффициент умножителя 1; EУ – управляющее напряжение; s – комплексная переменная.
Второй умножитель 2 и второй интегратор 4 образуют второй управляемый интегратор с передаточной функцией
где τУ2=τ2/(m2·EУ) – постоянная времени второго управляемого интегратора; τ2 – постоянная времени второго интегратора 4; m2 – масштабный коэффициент умножителя 2.
При одинаковых значениях масштабных коэффициентов m1=m2=m и при равенстве постоянных времени интеграторов τ1=τ2=τ0 также будут иметь одинаковые значения и постоянные времени первого и второго управляемых интеграторов τУ1=τУ2=τУ=τ0/(m·EУ).
Следовательно, и передаточные функции управляемых интеграторов в этом случае будут иметь одинаковые выражения
Умножители 1 и 2, интеграторы 3 и 4, сумматор 7 и инвертор 9 образуют управляемый фильтр (УФ). При подаче на первый вход сумматора 7, то есть на вход УФ сигнала N1(t), на выходе управляемого фильтра формируются два сигнала S1(t) и S2(t).
Для нахождения амплитудно-частотных и фазочастотных характеристик, а также определения резонансной частоты УФ, величины затухания и добротности фильтра найдем передаточные функции (ПФ) управляемого фильтра.
Найдем передаточную функцию УФ по первому W1(s) и второму W2(s) выходу при воздействии входного сигнала N1(t), для чего составим следующую систему уравнений в операторной форме:
где k1, k2 и k3 – коэффициенты первого сумматора 7 по соответствующим входам.
Используя метод исключения переменных в (4), запишем выражения для передаточной функции
и для передаточной функции
При k2=1 выражение (6) можно привести к классическому виду для колебательного звена с передаточной функцией
где ξ=k3/2 – коэффициент затухания, определяющий избирательные свойства звена.
Передаточную функцию W2(s) можно представить в виде последовательного соединения колебательного и дифференцирующего звеньев
Резонансную частоту ω0 управляемого фильтра можно найти из характеристического уравнения, для чего знаменатель в уравнениях (7) и (8) следует приравнять к нулю и найти корни этого уравнения
Для нахождения комплексно-частотных функций в выражениях (8) и (9) необходимо заменить комплексную переменную s→jω
Из (10) и (11) следует, что фазовый сдвиг между выходными сигналами S1(t) и S2(t) будет определяться только параметрами дифференцирующего звена с передаточной функцией WD(s)=τs, поскольку WD(jω)=j·ωτ.
Фазовый сдвиг
Из (12) следует, что фазовый сдвиг межу выходными сигналами S1(t) и S2(t) не зависит от частоты и во всем диапазоне рабочих частот составляет 90 электрических градусов.
Амплитудно-частотные характеристики
удобно представить в нормированном виде (фиг. 2), для чего введем в рассмотрение относительную расстройку по частоте
где ω0=1/τУ – резонансная частота.
После подстановки (15) в (13) и (14) получим
Графические зависимости коэффициентов передачи W1(ω) и W2(ω) от величины относительной расстройки δ приведены на фиг. 2. На резонансной частоте (при δ=1)
При равенстве коэффициентов k1=k3 коэффициенты передачи также будут равны W1(1)=W2(1)=1.
Спектральная чистота формируемых сигналов S1(t) и S2(t) будет зависеть как от формы сигнала N1(t), поступающего по цепи обратной связи, так и от добротности Q резонансной системы (управляемого фильтра), которая, в свою очередь, определяет (фиг. 2) полосу пропускания ППР фильтра.
Полосу пропускания ППР условно определяют по резонансной кривой (фиг. 2) на уровне 0,707 (-3 дБ) от ее максимального значения, соответствующего резонансной частоте.
Полоса пропускания управляемого фильтра
Добротность управляемого фильтра связана с коэффициентом затухания ξ следующим образом: Q=1/ξ=2/k3, следовательно, величину добротности Q, коэффициент затухания ξ и полосу пропускания ППР можно регулировать с помощью коэффициента k3, но при этом необходимо соблюдать равенство коэффициентов k1=k3.
В этом случае при любых значениях добротности на частоте резонанса амплитудные значения A1 и A2 сигналов S1(t) и S2(t) будут иметь одинаковые значения, равные единице, а фазовый сдвиг между ними составит 90 электрических градусов. Таким образом, на выходах управляемого фильтра формируются квадратурные сигналы стабильной амплитуды.
В предлагаемом решении на вход первого сумматора 7 подается квазигармонический сигнал N1(t) стабильной амплитуды A*, имеющий незначительное количество высших гармонических в своем составе.
Формирование сигнала обратной связи N1(t) происходит следующим образом.
Квадраторы 5 и 6, сумматор 8 и блок извлечения квадратного корня 12 образуют безынерционный датчик напряжения (ДН).
При подаче на вход квадратора 5 гармонического сигнала S1(t)=A1sin(ωt) на его выходе формируется сигнал
где m3 – масштабный коэффициент квадратора 5.
При подаче на вход квадратора 6 гармонического сигнала S2(t)=A2cos(ωt) на его выходе формируется сигнал
где m4 – масштабный коэффициент квадратора 6.
В результате суммирования сигналов L1(t) и L2(t) на выходе сумматора 8 образуется напряжение
На выходе блока извлечения квадратного корня 12, то есть на выходе ДН, формируется напряжение
При выполнении условий k3=k4=1, m3=m4=1 и при равенстве амплитудных значений A1=А2=A напряжение
то есть на выходе ДН напряжение будет в точности равно амплитудному значению Em=A.
На выходе делителя 10, то есть на первом выходе управляемого генератора квадратурных сигналов, формируется сигнал
где A*=1 – нормированное значение амплитуды сигнала N1(t).
Аналогично работает второй делитель 11, на выходе которого также формируется стабильный по амплитуде сигнал
Стабилизированный по амплитуде сигнал N1(t) 10 поступает на первый вход сумматора 7, замыкая цепь обратной связи и создавая условия для возбуждения гармонических колебаний.
Частота колебаний Ω0 в управляемом генераторе совпадает с резонансной частотой ω0=1/τУ и изменяется прямо пропорционально изменению управляющего напряжения EУ
Поскольку на вход управляемого фильтра с выхода первого делителя 10 подается гармонический сигнал, в котором практически нет высших гармонических составляющих, то спектральная чистота формируемых сигналов S1(t) и S2(t) намного выше, чем в прототипе.
Оценка нелинейных искажений выходных сигналов генератора проводилась на математической модели в программе PSIM-9. Нелинейные искажения на выходах управляемого генератора измерялись с помощью блока (THD – Total harmonic distortion) программы PSIM.
На первом выходе коэффициент нелинейных искажений не превысил 0,011%, что примерно в пять раз меньше по сравнению с прототипом.
На втором выходе управляемого генератора искажения сигнала N2(t) будут еще меньше из-за фильтрующего свойства второго интегратора 4. Незначительное содержание высших гармоник выходных сигналов N1(t) и N2(t) является достоинством предлагаемого генератора.
Для сокращения времени запуска генератора на четвертый вход сумматора 7 поступает корректирующий сигнал Sk(t) с формирователя одиночного импульса, который выполнен из компаратора 13 и источника опорного напряжения 14. Корректирующий сигнал Sk(t) подается также на третий вход сумматора 8, обеспечивая тем самым нормальную работу делителей 10 и 11, которые при отсутствии корректирующего сигнала формируют на своих выходах кратковременный выброс напряжения при запуске генератора и для устранения которого на выходах делителей 10 и 11 потребуются ограничители.
Введение корректирующего сигнала Sk(t) значительно улучшает динамику управляемого генератора как в пусковом режиме (фиг. 3), так и при переключении генератора с одной частоты на другую.
Длительность переходного процесса при запуске управляемого генератора квадратурных сигналов определяется (фиг. 3) длительностью ТИ корректирующего сигнала Sk(t) и значением коэффициента передачи по четвертому входу сумматора 7. Длительность TИ сигнала Sk(t) можно изменять с помощью напряжения смещения E0, поступающего на вход компаратора 13 от источника опорного напряжения 14.
Графические зависимости, поясняющие принцип уменьшения переходных процессов в генераторе, приведены на фиг. 3. На фиг. 3, а и фиг. 3, б показаны графики для случая, когда величина опорного напряжения E0=0,1 В, а коэффициент передачи сумматора по четвертому входу k4=0,1. На фиг. 3, в и фиг. 3, г показаны графики для случая, когда величина опорного напряжения E0=0,8 В, а коэффициент передачи сумматора по четвертому входу k4=1,0. На фиг. 3, д и фиг. 3, е показаны графики для случая, когда величина опорного напряжения Е0=0,9 В, а коэффициент передачи сумматора по четвертому входу k4=10,0.
Выбор наилучшего сочетания длительности TИ корректирующего сигнала Sk(t) и коэффициента передачи k4 сумматора 7 по четвертому входу позволил минимизировать длительность переходного процесса при запуске управляемого генератора квадратурных сигналов, а наличие делителей 10 и 11 позволило дополнительно стабилизировать амплитуды выходных сигналов N1(t) и N2(t). Следует отметить, что сигнал Sk(t) формируется только один раз при запуске генератора и в дальнейшей работе управляемого генератора участия не принимает.
Использование предлагаемого изобретения позволит повысить (по сравнению с аналогами и прототипом) спектральную чистоту формируемых квадратурных гармонических сигналов.
Источники информации
1. Вавилов А.А., Солодовников А.И. Экспериментальное определение частотных характеристик автоматических систем. M.-Л.: Госэнергоиздат, 1963 г. – 252 с.
2. Вавилов А.А., Солодовников А.И., Шнайдер В.В. Низкочастотные измерительные генераторы. – Л.: Энергоатомиздат, Ленингр. отделение, 1985 г. – 104 с.
3. Патент РФ №2506692, H03B 27/00. Дубровин B.C. Управляемый генератор, заявл. 31.08.2012, опубл. 10.02.2014. Бюл. №4.
Управляемый генератор квадратурных сигналов, содержащий первый и второй умножители, первый и второй интеграторы, первый и второй квадраторы, первый и второй сумматоры и инвертор, при этом первый квадратор включен между выходом первого интегратора и первым входом второго сумматора, второй квадратор включен между выходом второго интегратора и вторым входом второго сумматора, к выходу первого сумматора подключен первый вход первого умножителя, выход которого соединен с входом первого интегратора, к выходу которого подключен первый вход второго умножителя, выход которого соединен с входом второго интегратора, выход которого соединен со вторым входом первого сумматора, при этом вторые входы первого и второго умножителей соединены с управляющей шиной, отличающийся тем, что в него дополнительно введены первый и второй делители, блок извлечения квадратного корня, компаратор и источник опорного напряжения, минусовой зажим которого соединен с общей шиной, а плюсовой – с инвертирующим входом компаратора, выход которого соединен с четвертым входом первого сумматора и третьим входом второго сумматора, между выходом которого и неинвертирующим входом компаратора включен блок извлечения квадратного корня, при этом инвертор включен между выходом первого интегратора и третьим входом первого сумматора, первый вход которого соединен с выходом первого делителя и первым выходом управляемого генератора квадратурных сигналов, второй выход которого соединен с выходом второго делителя, первый вход которого подключен к выходу второго интегратора, причем выход блока извлечения квадратного корня соединен со вторыми входами первого и второго делителей, а первый вход первого делителя подключен к выходу первого интегратора.
findpatent.ru
Управляемый генератор квадратурных сигналов
Изобретение относится к радиотехнике и связи и может быть использовано при построении управляемых генераторов.
Известен генератор [1 (с. 202 – рис. 4-16. «Электронный генератор с ограничением амплитуды колебаний»)], содержащий два интегратора, сумматор, нелинейный элемент (с релейной характеристикой) и два пассивных управляемых делителя, осуществляющих перестройку выходных колебаний по частоте. На выходе нелинейного элемента формируются биполярные импульсы прямоугольной формы с высоким содержанием высших нечетных гармоник. Биполярный прямоугольный сигнал подается по цепи обратной связи непосредственно на вход сумматора, поэтому на выходе первого интегратора будет сформирован сигнал, имеющий значительные нелинейные искажения.
Известен управляемый генератор [2 (с. 17 – рис. 1-9.)], который содержит два интегратора, два умножителя, нелинейный элемент и сумматор, к выходу которого подключен первый умножитель, управляющий вход которого соединен с управляющей шиной и управляющим входом второго умножителя, между выходом которого и первым входом сумматора включен второй интегратор, выход которого соединен со вторым выходом управляемого генератора, первый выход которого подключен к выходу первого интегратора, при этом нелинейный элемент включен между первым выходом управляемого генератора и вторым входом сумматора, а вход второго умножителя подключен к выходу первого интегратора.
Для стабилизации амплитуды используется нелинейный элемент, при этом коэффициент гармоник и стабильность амплитуды связаны обратной зависимостью, то есть уменьшение коэффициента гармоник за счет уменьшения степени нелинейности приводит к снижению стабильности амплитуды и, напротив, увеличение стабильности амплитуды ведет к увеличению гармоник в выходном сигнале. Сравнительно невысокие метрологические характеристики (стабильность амплитуды 1-2% при коэффициенте гармоник 0,5-1%) ограничивают применение таких генераторов [2 (с. 19)].
Наиболее близким устройством к заявленному изобретению по совокупности существенных признаков является, принятый за прототип, управляемый генератор [3], содержащий два интегратора, три умножителя, три квадратора, релейный элемент, ограничитель, два сумматора и инвертор, включенный между выходом третьего квадратора и третьим входом второго сумматора, выход которого соединен со вторым входом третьего умножителя, между выходом которого и первым входом первого сумматора включен ограничитель, при этом первый интегратор включен между выходом первого умножителя и первым входом второго умножителя, к выходу которого подключен вход второго интегратора, выход которого соединен со вторым входом первого сумматора, к выходу которого подключен первый вход первого умножителя, второй вход которого соединен со вторым входом второго умножителя и первой шиной управляемого генератора, вторая шина которого соединена с входом третьего квадратора, причем выходы первого и второго интеграторов соединены с соответствующими выходами управляемого генератора, первый квадратор включен между первым выходом управляемого генератора и первым входом второго сумматора, второй квадратор включен между вторым выходом управляемого генератора и вторым входом второго сумматора, а релейный элемент включен между первым выходом управляемого генератора и первым входом третьего умножителя.
На первом выходе генератора коэффициент нелинейных искажений превышает 0,05%, что не позволяет отнести данное устройство к прецизионным генераторам по данному показателю.
Задачей, на решение которой направлено изобретение, является повышение спектральной чистоты формируемых квадратурных гармонических сигналов.
Технический результат, достигаемый при осуществлении изобретения, заключается в повышении спектральной чистоты формируемых квадратурных гармонических сигналов путем введения дополнительных элементов и организации новых функциональных связей между элементами.
Указанный технический результат при осуществлении изобретения достигается тем, что в управляемый генератор квадратурных сигналов, содержащий первый и второй умножители, первый и второй интеграторы, первый и второй квадраторы, первый и второй сумматоры и инвертор, при этом первый квадратор включен между выходом первого интегратора и первым входом второго сумматора, второй квадратор 6 включен между выходом второго интегратора и вторым входом второго сумматора, к выходу первого сумматора подключен первый вход первого умножителя, выход которого соединен с входом первого интегратора, к выходу которого подключен первый вход второго умножителя, выход которого соединен с входом второго интегратора, выход которого соединен со вторым входом первого сумматора, при этом вторые входы первого и второго умножителей соединены с управляющей шиной, в него дополнительно введены первый и второй делители, блок извлечения квадратного корня, компаратор, и источник опорного напряжения, минусовой зажим которого соединен с общей шиной, а плюсовой – с инвертирующим входом компаратора, выход которого соединен с четвертым входом первого сумматора и третьим входом второго сумматора, между выходом которого и неинвертирующим входом компаратора включен блок извлечения квадратного корня, при этом инвертор включен между выходом первого интегратора и третьим входом первого сумматора, первый вход которого соединен выходом первого делителя и первым выходом управляемого генератора квадратурных сигналов, второй выход которого соединен с выходом второго делителя, первый вход которого подключен к выходу второго интегратора, причем выход блока извлечения квадратного корня соединен со вторыми входами первого и второго делителей, а первый вход первого делителя подключен к выходу первого интегратора.
Проведенный заявителем анализ уровня техники, включающий поиск по патентным и научно-техническим источникам информации, позволил установить, что заявитель не обнаружил аналог, характеризующийся признаками, тождественными всем существенным признакам заявленного изобретения. Следовательно, заявленное изобретение соответствует условию «новизна».
Введение в предлагаемый управляемый генератор квадратурных сигналов двух делителей, блока извлечения квадратного корня, компаратора и источника опорного напряжения, а также организация новых функциональных связей между элементами позволили повысить спектральную чистоту формируемых квадратурных гармонических сигналов.
Изобретение поясняется структурной схемой управляемого генератора квадратурных сигналов, изображенной на фиг. 1, и графиками, поясняющими принцип работы управляемого генератора квадратурных сигналов – на фиг. 2 и фиг. 3.
Управляемый генератор квадратурных сигналов содержит (фиг. 1) первый 1 и второй 2 умножители, первый 3 и второй интеграторы 4, первый 5 и второй 6 квадраторы, первый 7 и второй 8 сумматоры, инвертор 9, первый 10 и второй 11 делители, блок извлечения квадратного корня 12, компаратор 13 и источник опорного напряжения 14, минусовой зажим которого соединен с общей шиной, а плюсовой – с инвертирующим входом компаратора 13, выход которого соединен с четвертым входом первого сумматора 7 и третьим входом второго сумматора 8, между выходом которого и неинвертирующим входом компаратора 13 включен блок извлечения квадратного корня 12, при этом первый квадратор 5 включен между выходом первого интегратора 3 и первым входом второго сумматора 8, второй квадратор 6 включен между выходом второго интегратора 4 и вторым входом второго сумматора 8, а инвертор включен между выходом первого интегратора 3 и третьим входом первого сумматора 7, к выходу которого подключен первый вход первого умножителя 1, между выходом которого и первым входом второго умножителя 2 включен первый интегратор 3, причем выход блока извлечения квадратного корня 12 соединен со вторыми входами первого 10 и второго 11 делителей, шина управления соединена со вторым входом первого умножителя 1 и вторым входом второго умножителя 2, к выходу которого подключен вход второго интегратора 4, выход которого соединен со вторым входом первого сумматора 7, первый вход которого соединен с выходом первого делителя и первым выходом управляемого генератора квадратурных колебаний, второй выход которого соединен с выходом второго делителя 11, первый вход которого подключен к выходу второго интегратора 4, а первый вход первого делителя соединен с выходом первого интегратора 3.
Управляемый генератор квадратурных сигналов работает следующим образом.
Первый умножитель 1 и первый интегратор 3 образуют (фиг. 1) первый управляемый интегратор с передаточной функцией
где τУ1=τ1/(m1·EУ) – постоянная времени первого управляемого интегратора; τ1 – постоянная времени первого интегратора 3; m1 – масштабный коэффициент умножителя 1; EУ – управляющее напряжение; s – комплексная переменная.
Второй умножитель 2 и второй интегратор 4 образуют второй управляемый интегратор с передаточной функцией
где τУ2=τ2/(m2·EУ) – постоянная времени второго управляемого интегратора; τ2 – постоянная времени второго интегратора 4; m2 – масштабный коэффициент умножителя 2.
При одинаковых значениях масштабных коэффициентов m1=m2=m и при равенстве постоянных времени интеграторов τ1=τ2=τ0 также будут иметь одинаковые значения и постоянные времени первого и второго управляемых интеграторов τУ1=τУ2=τУ=τ0/(m·EУ).
Следовательно, и передаточные функции управляемых интеграторов в этом случае будут иметь одинаковые выражения
Умножители 1 и 2, интеграторы 3 и 4, сумматор 7 и инвертор 9 образуют управляемый фильтр (УФ). При подаче на первый вход сумматора 7, то есть на вход УФ сигнала N1(t), на выходе управляемого фильтра формируются два сигнала S1(t) и S2(t).
Для нахождения амплитудно-частотных и фазочастотных характеристик, а также определения резонансной частоты УФ, величины затухания и добротности фильтра найдем передаточные функции (ПФ) управляемого фильтра.
Найдем передаточную функцию УФ по первому W1(s) и второму W2(s) выходу при воздействии входного сигнала N1(t), для чего составим следующую систему уравнений в операторной форме:
где k1, k2 и k3 – коэффициенты первого сумматора 7 по соответствующим входам.
Используя метод исключения переменных в (4), запишем выражения для передаточной функции
и для передаточной функции
При k2=1 выражение (6) можно привести к классическому виду для колебательного звена с передаточной функцией
где ξ=k3/2 – коэффициент затухания, определяющий избирательные свойства звена.
Передаточную функцию W2(s) можно представить в виде последовательного соединения колебательного и дифференцирующего звеньев
Резонансную частоту ω0 управляемого фильтра можно найти из характеристического уравнения, для чего знаменатель в уравнениях (7) и (8) следует приравнять к нулю и найти корни этого уравнения
Для нахождения комплексно-частотных функций в выражениях (8) и (9) необходимо заменить комплексную переменную s→jω
Из (10) и (11) следует, что фазовый сдвиг между выходными сигналами S1(t) и S2(t) будет определяться только параметрами дифференцирующего звена с передаточной функцией WD(s)=τs, поскольку WD(jω)=j·ωτ.
Фазовый сдвиг
Из (12) следует, что фазовый сдвиг межу выходными сигналами S1(t) и S2(t) не зависит от частоты и во всем диапазоне рабочих частот составляет 90 электрических градусов.
Амплитудно-частотные характеристики
удобно представить в нормированном виде (фиг. 2), для чего введем в рассмотрение относительную расстройку по частоте
где ω0=1/τУ – резонансная частота.
После подстановки (15) в (13) и (14) получим
Графические зависимости коэффициентов передачи W1(ω) и W2(ω) от величины относительной расстройки δ приведены на фиг. 2. На резонансной частоте (при δ=1)
При равенстве коэффициентов k1=k3 коэффициенты передачи также будут равны W1(1)=W2(1)=1.
Спектральная чистота формируемых сигналов S1(t) и S2(t) будет зависеть как от формы сигнала N1(t), поступающего по цепи обратной связи, так и от добротности Q резонансной системы (управляемого фильтра), которая, в свою очередь, определяет (фиг. 2) полосу пропускания ППР фильтра.
Полосу пропускания ППР условно определяют по резонансной кривой (фиг. 2) на уровне 0,707 (-3 дБ) от ее максимального значения, соответствующего резонансной частоте.
Полоса пропускания управляемого фильтра
Добротность управляемого фильтра связана с коэффициентом затухания ξ следующим образом: Q=1/ξ=2/k3, следовательно, величину добротности Q, коэффициент затухания ξ и полосу пропускания ППР можно регулировать с помощью коэффициента k3, но при этом необходимо соблюдать равенство коэффициентов k1=k3.
В этом случае при любых значениях добротности на частоте резонанса амплитудные значения A1 и A2 сигналов S1(t) и S2(t) будут иметь одинаковые значения, равные единице, а фазовый сдвиг между ними составит 90 электрических градусов. Таким образом, на выходах управляемого фильтра формируются квадратурные сигналы стабильной амплитуды.
В предлагаемом решении на вход первого сумматора 7 подается квазигармонический сигнал N1(t) стабильной амплитуды A*, имеющий незначительное количество высших гармонических в своем составе.
Формирование сигнала обратной связи N1(t) происходит следующим образом.
Квадраторы 5 и 6, сумматор 8 и блок извлечения квадратного корня 12 образуют безынерционный датчик напряжения (ДН).
При подаче на вход квадратора 5 гармонического сигнала S1(t)=A1sin(ωt) на его выходе формируется сигнал
где m3 – масштабный коэффициент квадратора 5.
При подаче на вход квадратора 6 гармонического сигнала S2(t)=A2cos(ωt) на его выходе формируется сигнал
где m4 – масштабный коэффициент квадратора 6.
В результате суммирования сигналов L1(t) и L2(t) на выходе сумматора 8 образуется напряжение
На выходе блока извлечения квадратного корня 12, то есть на выходе ДН, формируется напряжение
При выполнении условий k3=k4=1, m3=m4=1 и при равенстве амплитудных значений A1=А2=A напряжение
то есть на выходе ДН напряжение будет в точности равно амплитудному значению Em=A.
На выходе делителя 10, то есть на первом выходе управляемого генератора квадратурных сигналов, формируется сигнал
где A*=1 – нормированное значение амплитуды сигнала N1(t).
Аналогично работает второй делитель 11, на выходе которого также формируется стабильный по амплитуде сигнал
Стабилизированный по амплитуде сигнал N1(t) 10 поступает на первый вход сумматора 7, замыкая цепь обратной связи и создавая условия для возбуждения гармонических колебаний.
Частота колебаний Ω0 в управляемом генераторе совпадает с резонансной частотой ω0=1/τУ и изменяется прямо пропорционально изменению управляющего напряжения EУ
Поскольку на вход управляемого фильтра с выхода первого делителя 10 подается гармонический сигнал, в котором практически нет высших гармонических составляющих, то спектральная чистота формируемых сигналов S1(t) и S2(t) намного выше, чем в прототипе.
Оценка нелинейных искажений выходных сигналов генератора проводилась на математической модели в программе PSIM-9. Нелинейные искажения на выходах управляемого генератора измерялись с помощью блока (THD – Total harmonic distortion) программы PSIM.
На первом выходе коэффициент нелинейных искажений не превысил 0,011%, что примерно в пять раз меньше по сравнению с прототипом.
На втором выходе управляемого генератора искажения сигнала N2(t) будут еще меньше из-за фильтрующего свойства второго интегратора 4. Незначительное содержание высших гармоник выходных сигналов N1(t) и N2(t) является достоинством предлагаемого генератора.
Для сокращения времени запуска генератора на четвертый вход сумматора 7 поступает корректирующий сигнал Sk(t) с формирователя одиночного импульса, который выполнен из компаратора 13 и источника опорного напряжения 14. Корректирующий сигнал Sk(t) подается также на третий вход сумматора 8, обеспечивая тем самым нормальную работу делителей 10 и 11, которые при отсутствии корректирующего сигнала формируют на своих выходах кратковременный выброс напряжения при запуске генератора и для устранения которого на выходах делителей 10 и 11 потребуются ограничители.
Введение корректирующего сигнала Sk(t) значительно улучшает динамику управляемого генератора как в пусковом режиме (фиг. 3), так и при переключении генератора с одной частоты на другую.
Длительность переходного процесса при запуске управляемого генератора квадратурных сигналов определяется (фиг. 3) длительностью ТИ корректирующего сигнала Sk(t) и значением коэффициента передачи по четвертому входу сумматора 7. Длительность TИ сигнала Sk(t) можно изменять с помощью напряжения смещения E0, поступающего на вход компаратора 13 от источника опорного напряжения 14.
Графические зависимости, поясняющие принцип уменьшения переходных процессов в генераторе, приведены на фиг. 3. На фиг. 3, а и фиг. 3, б показаны графики для случая, когда величина опорного напряжения E0=0,1 В, а коэффициент передачи сумматора по четвертому входу k4=0,1. На фиг. 3, в и фиг. 3, г показаны графики для случая, когда величина опорного напряжения E0=0,8 В, а коэффициент передачи сумматора по четвертому входу k4=1,0. На фиг. 3, д и фиг. 3, е показаны графики для случая, когда величина опорного напряжения Е0=0,9 В, а коэффициент передачи сумматора по четвертому входу k4=10,0.
Выбор наилучшего сочетания длительности TИ корректирующего сигнала Sk(t) и коэффициента передачи k4 сумматора 7 по четвертому входу позволил минимизировать длительность переходного процесса при запуске управляемого генератора квадратурных сигналов, а наличие делителей 10 и 11 позволило дополнительно стабилизировать амплитуды выходных сигналов N1(t) и N2(t). Следует отметить, что сигнал Sk(t) формируется только один раз при запуске генератора и в дальнейшей работе управляемого генератора участия не принимает.
Использование предлагаемого изобретения позволит повысить (по сравнению с аналогами и прототипом) спектральную чистоту формируемых квадратурных гармонических сигналов.
Источники информации
1. Вавилов А.А., Солодовников А.И. Экспериментальное определение частотных характеристик автоматических систем. M.-Л.: Госэнергоиздат, 1963 г. – 252 с.
2. Вавилов А.А., Солодовников А.И., Шнайдер В.В. Низкочастотные измерительные генераторы. – Л.: Энергоатомиздат, Ленингр. отделение, 1985 г. – 104 с.
3. Патент РФ №2506692, H03B 27/00. Дубровин B.C. Управляемый генератор, заявл. 31.08.2012, опубл. 10.02.2014. Бюл. №4.
Управляемый генератор квадратурных сигналов, содержащий первый и второй умножители, первый и второй интеграторы, первый и второй квадраторы, первый и второй сумматоры и инвертор, при этом первый квадратор включен между выходом первого интегратора и первым входом второго сумматора, второй квадратор включен между выходом второго интегратора и вторым входом второго сумматора, к выходу первого сумматора подключен первый вход первого умножителя, выход которого соединен с входом первого интегратора, к выходу которого подключен первый вход второго умножителя, выход которого соединен с входом второго интегратора, выход которого соединен со вторым входом первого сумматора, при этом вторые входы первого и второго умножителей соединены с управляющей шиной, отличающийся тем, что в него дополнительно введены первый и второй делители, блок извлечения квадратного корня, компаратор и источник опорного напряжения, минусовой зажим которого соединен с общей шиной, а плюсовой – с инвертирующим входом компаратора, выход которого соединен с четвертым входом первого сумматора и третьим входом второго сумматора, между выходом которого и неинвертирующим входом компаратора включен блок извлечения квадратного корня, при этом инвертор включен между выходом первого интегратора и третьим входом первого сумматора, первый вход которого соединен с выходом первого делителя и первым выходом управляемого генератора квадратурных сигналов, второй выход которого соединен с выходом второго делителя, первый вход которого подключен к выходу второго интегратора, причем выход блока извлечения квадратного корня соединен со вторыми входами первого и второго делителей, а первый вход первого делителя подключен к выходу первого интегратора.edrid.ru
Квадратурный rc-генератор
Изобретение относится к радиотехнике и может быть использовано в качестве низкочастотного генератора электрических колебаний . Цель изобретения – повышение стабильности частоты выходных колебаний и расширение диапазона рабочих частот в сторону верхних частот. Квадратурный RC- генератор содержит операционные усилители (У) 1-4, цепи 5, 6 отрицательной и положительной обратной связи, конденсаторы 7 и 8, резисторы 9-14. При этом У 1, конденсатор 7 и резистор 9 образуют интегратор (И) 15; У 2, конденсатор 8 и резистор 10 образуют И 16, У 3, резисторы 11 и 12 образуют сумматор 17, в цепь отрицательной обратной связи которого включен повторитель 18 напряжения, выполненный на У 4 и резисторах 13, 14. На частоте генерации фазовый сдвиг в петле, образованной И 15, 16, а также сумматором 17, достигает 360°, чемобеспечивается условие баланса фаз. Включение в петлю обратной связи У 3 повторителя 18, а также введение дополнительной обратной связи с инвертирующего входа У 1 на неинвертирующий вход У 3 позволяет обеспечить компенсацию паразитного фазового сдвига, обусловленного конечной частотой У1-3, что повышает стабильность частоты выходных колебаний и расширяет диапазон рабочих частот в сторону верхних частот. 1 ил. Ё
СОЮЗ СОВЕТСКИХ
СОЦИАЛИСТИЧЕСКИХ
РЕСПУБЛИК (я)5 Н 03 В 5/26
ГОСУДА РСТ В Е НН1Ы И КОМИТЕТ
ПО ИЗОБРЕТЕНИЯМ И ОТКРЫТИЯМ
ПРИ ГКНТ СССР
ОПИСАНИЕ ИЗОБРЕТЕНИЯ
К АВТОРСКОМУ СВИДЕТЕЛЬСТВУ (21) 4723290/09 (22) 20.07.89 (46) 23.06,91. Бюл. М 23 (71) Таганрогский радиотехнический институт им. В.Д. Кал м ы кова (72) В.С,Григорьев, С.В.Гришин и С.Г,Крутчинский (53) 621.373.42 (088.8) (56) Заявка ФРГ М 2500572, кл. Н 03 В 5/20, опублик. 15,07.76.
“ELMEKO. 28.2. Celostat. Konf. o elektron. гпейс1 techn., Вгпо, 1978, Sb, ргебп” .Brno, 1978. с. 17-20. (54) КВАДРАТУРНЫЙ RC-ГЕНЕРАТОР (57) Изобретение относится к радиотехнике и может быть использовано в качестве низкочастотного генератора электрических колебаний. Цель изобретения — повышение стабильности частоты выходных колебаний и расширение диапазона рабочих частот в сторону верхних частот, Квадратурный RCгенератор содержит операционные усили. Ы « „1658369 А1 тели (У) 1-4, цепи 5, 6 отрицательной и положительной обратной связи, конденсаторы 7 и 8, резисторы 9-14. При этом У 1, конденсатор 7 и резистор 9 образуют интегратор (И)
15; У 2, конденсатор 8 и резистор 10 образуют И 16; У 3, резисторы 11 и 12 образуют сумматор 17, в цепь отрицательной обратной связи которого включен повторитель 18 напряжения, выполненный на У 4 и резисторах 13, 14. На частоте генерации фазовый сдвиг в петле, образованной И 15, 16, а также сумматором 17, достигает 360О, чем обеспечивается условие баланса фаз. Включение в петлю обратной связи У 3 повторителя 18, а также введение дополнительной обратной связи с инвертирующего входа У
1 на неинвертирующий вход У 3 позволяет обеспечить компенсацию паразитного фазового сдвига. обусловленного конечнОй частотой У1-3, что повышает стабильность частоты выходных колебаний и расширяет диапазон рабочих частот в сторону верхних частот, 1 ил.
1658369
55
Изобретение относится к радиотехнике и может быть использовано в качестве низкочастотного генератора электрических колебаний.
Цель изобретения — повышение стабильности частоты выходных колебаний и расширение диапазона рабочих частот в сторону верхних частот.
На чертеже приведена структурная электрическая схема квадратурного RC-генератора.
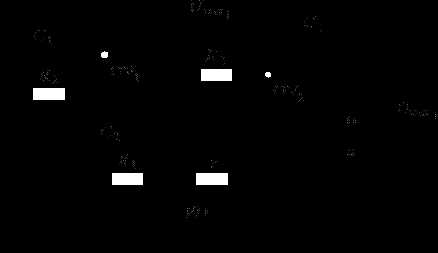
Квадратурный RC-генератор содержит первый — четвертый операционные усилители 1-4, цепь 5 отрицательной обратной связи, цепь 6 положительной обратной связи, первый 7 и второй 8 конденсаторы, первыйшестой резисторы 9-14. Первый операционный усилитель 1, первый резистор 9 и первый конденсатор 7 образуют первый интегратор 15. Второй операционный усилитель 2, второй резистор 10 и второй конденсатор 8 образуют второй интегратор
16. Третий операционный усилитель 3, третий 11 и четвертый 12 резисторы образуют сумматор 17, в цепь отрицательной обратной связи которого включен повторитель 18 напряжения, выполненный на четвертом операционном усилителе 4, пятом 13 и шестом 14 резисторах.
Квадратурный RC-генератор работает следующим образом.
Квадратурный RC-генератор представляет собой многопетлевую структуру с четырьмя параллельными контурами общих обратных связей, в том числе и через цепь 5 и цепь 6, и одним контуром местной обратной связи — через повторитель 18 напряжения.
На частоте генерации фазовый сдвиг в петле, образованной первым 15 и вторым 16 интеграторами, а также сумматором 17, достигает значения 360О, чем обеспечивается выполнение условия баланса фаз, Если на этой частоте выполняется также условие баланса амплитуд, что соответствует повышению суммарного эффекта положительных обратных связей над суммарным эффектом отрицательных обратных связей, то в квадратурном генераторе возникают незатухающие гармонические колебания.
При этом вторая, третья и более высокие гармоники частоты генерации будут подавляться, так как для них условия генерации выполняться не будут, Включение в петлю обратной связи третьего операционного усилителя 3 повторителя 18 напряжения, а также введение дополнительной обратной связи с инвертирующего входа первого операционного усилителя 1 на неинвертирующий вход
45 т ретьего операционного усилителя 3 позволяет обеспечить компенсацию фазового сдвига, обусловленную конечной верхней граничной частотой первого 1, второго 2 и третьего 3 операционных усилителей.
При этом частота генерации определяется из соотношения
Rä 11 Rg С7 Rlo СВ где Ст, Св- емкости соответственно первого
T и второго 8 конденсаторов;
Rg-R12 — сопротивления первого-четвертого резисторов 9-12, В случае выполнения равенства Rg C> =
= Я1оСв и использования операционных усилителей с одинаковыми частотными свойствами условие линейной компенсации нестабильности частоты выполняется при
R1i – Rn в широком диапазоне частот.
В квадратурном RC-генераторе полная компенсация нестабильности частоты. может быть обеспечена для любого значения частоты генерация путем соответствующего выбора коэффициента деления реэистивного делителя напряжения, который следует включить между инвертирующим входом первого операционного усилителя 1 и нвинвертирующим входом третьего операционного усилителя 3.
Формула изобретения
Квадратурный RC-генератор, содержащий первый, второй, третий и четвертый операционные усилители, первый конденсатор, который включен между выходом и. инвертирующим входом первого операционного усилителя, второй конденсатор, который включен между выходом и инвертирующим входом второго операционного усилителя, первый резистор, который включен между выходом третьего операционного усилителя и инвертирующим входом первого операционного усилителя, второй резистор, который включен между выходом первого операционного усилителя и инвертирующим входом второго операционного усилителя, третий резистор, который включен между выходом второго операционного усилителя и инвертирующим входом третьего операционного усилителя, четвертый резистор, первый вывод которого подключен к инвертирующему входу третьего операционного усилителя, пятый резистор, который включен между выходом и инвертирующим входом четвертого операционного усилителя, шестой резистор, первый вывод которого подключен к инвертирующему входу четвертого операционного усилителя, цепь положительной
1658369
Составитель В. Рудай
Техред М.Моргентал Корректор H. Король
Редактор В. Данко
Заказ 1721 Тираж 463 Подписное
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР
113035, Москва, Ж-35, Раушская наб,. 4/5
Производственно-издательский комбинат “Патент”, г. Ужгород, ул.Гагарина, 101 обратной связи, которая включена между выходом первого операционного усилителя и инвертирующим входом третьего операционного усилителя, цепь отрицательной обратной связи, вход которой подключен к выходу первого операционного усилителя, при этом неинвертриующие входы первого и второго операционных усилителей подключены к общей шине. о т л и ч а ю щ и йс я тем, что, с целью повышения стабильности частоты выходных колебаний и расширения диапазона рабочих частот в сторону верхних частот, выход цепи отрицательной обратной связи подключен к инвертирующему входу четвертого операционного усилителя, выход третьего операционного
5 усилителя подключен к неинвертирующему входу четвертого операционного усилителя и второму выводу шестого резистора, инвертирующий вход первого операционного усилителя подключен к неинвертирующему входу
10 третьего операционного усилителя, выход четвертого операционного усилителя подключен к второму выводу четвертого резистора.
findpatent.ru
Простой цифровой радиоприемник. Часть 2. / Радио / Сообщество EasyElectronics.ru
Предыдущая статья вызвала некоторой интерес к теме цифрового радио, что меня порадовало. Поэтому я решил разразиться второй частью темы.Итак, вы уже собрали и проверили работу гетеродинного приемника, о котором я рассказывал в предыдущей статье? Будем надеяться, что да: о). И все почитали соответствующую литературу о том, как он работает, и какие недостатки у него есть. Можно конечно еще многое усовершенствовать в гетеродинном приемнике, и даже заставить его принимать FM модуляцию, ввести АРУ и всякие свистелки переделки. Однако все это был так сказать детский сад и стоит, думаю перейти к более серьезным вещам. Эта часть статьи будет теоретической. Я постараюсь объяснить все как можно проще, так сказать на пальцах.
Чтобы двигаться дальше, нам надо в первую очередь усовершенствовать наш смеситель. Но за нас уже давно все придумали, и это усовершенствование называется — квадратурный смеситель.
Квадратурный смеситель
Выглядит он как-то так.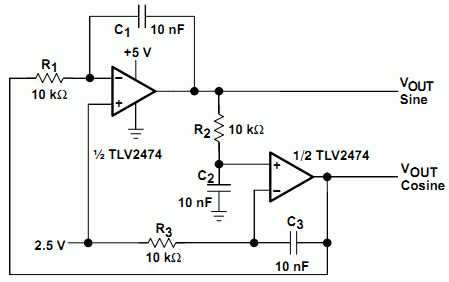
По сути, это два смесителя о котором я рассказывал в предыдущей части. На первые входы обоих смесителей подается сигнал с нашего АЦП, а на вторые сигналы с гетеродина. Однако, сигналы гетеродина в этом смесителе должны быть сдвинуты на 90 градусов. Т.е. поток данных с АЦП умножается в первом смесителе на синус, а во втором на косинус, формируемый нашим гетеродином. Очевидно, что гетеродин теперь должен иметь два выхода сдвинутых на 90 градусов, т.е. sin, cos. Гетеродин у нас стал квадратурным гетеродином.
Что делает такой смеситель:
Пусть входной сигнал у нас будет X, выходные сигналы обозначим как, I – та часть, которая умножена на косинус, Q – та часть, которая умножена на синус. w = 2пf. Откуда появятся такие уравнения:
I(t) = X(t) * cos (w)
Q(t) = X(t) * sin (w)
Такие чудо сигналы, имеют место на выходе нашего смесителя. Это так называемый квадратурный сигнал, а именно: I – синфазный, Q – квадратурный сигнал. Это вам ничего не напоминает? Да, да, это очень похоже на действительную и мнимую часть сигнала. Или комплексную огибающую.
И уже из этого квадратурного сигнала можно демодулировать все что угодно. Вопрос остается только в сложности и реализуемости конкретного вида демодуляции.
Программная реализация
В принципе если вы читали предыдущую статью, не должно возникнуть никаких особых затруднений. Просто нужно все, что было в гетеродинном приемнике скопипастить еще один раз. И усовершенствовать наш гетеродин, переделав его в квадратурный.
Модернизация DDS колебатора:
Все изменения сводятся к установке квадратурного выхода DDS генератора. Теперь вы можете проделать путь к фазофильтровому или любому другому приемнику.
Подробнее о квадратурном демодуляторе можно почитать, например в [1], [2].
Дециматор – CIC фильтр
Прошлый раз меня просили рассказать о выборе частоты после дециматора. Немного расскажу, как рекомендуется работать при децимации сигнала. Во-первых, децимацию рекомендуется делать ступенями. Т.е. разбивать большой коэффициент децимации на несколько маленьких. Это повышает подавление нежелательных составляющих неминуемо образующихся при децимации. Т.е. алиазинга.
Кроме того, рекомендуется на каждой ступени, увеличивать разрядность, это способствует увеличению динамического диапазона приемника. Конкретные рекомендации, типа: сколько ступеней использовать при таком то коэффициенте децимации дать трудно. Но обычно используют от 2 до 6, в зависимости от коэффициента децимации. Чем больше коэффициент, тем больше ступеней. Например, для гетеродинного приемника с коэффициентом децимации 1024 можно было бы разбить всю децимацию на 4 ступени, с коэффициентами децимации 8, 8, 8, 2. Т.е. 8*8*8*2 = 1024. В реальности эффект от такого разбивания можно увидеть только сделав БПФ и наблюдая за спектром.
Однако все это повышает ресурсоемкость структуры децимации. Так – что тут как говорится, каждый умирает сам.: о)
Выбор коэффициента децимации в первую очередь зависит от применяемого ЦАП, или необходимости синхронизироваться со стандартами частоты дискретизации звука. А так же от желаемой полосы обзора спектра, если в системе есть БПФ. Ну и критерий Найквиста никто не отменял. Кое какую информацию о децимации можно почерпнуть в [3]
Это сладкое слово CORDIC
Собсно, это так называемый appendix, как любят в забугорной лит-ре писать: о). В принципе я вам уже рассказал выше все, что хотел в этой части статьи. А далее я расскажу о том как делают крутые дяди, жаль что тети в этой теме встречаются редко: о).
Дело в том, что такую реализацию квадратурного смесителя, о которой я вам рассказал, сейчас стараются не делать. А вместо двух умножителей с DDS генератором, используют CORDIC алгоритм с аккумулятором фазы. Минус DDS+умножитель заключается в том, что у DDS генератора кроме аккумулятора фазы есть таблица синуса, и эта таблица имеет некоторую точность. И еще, зачастую фазу и таблицу синуса усекают, иначе она бы занимала очень много памяти. Не буду вдаваться в подробности работы DDS генератора, я думаю, это вы найдете в интернете без проблем. А вот бяка заключается в том, что якобы усечение фазы и как следствие погрешность установки отсчетов синуса нехорошо сказывается на SFDR (динамический диапазон свободный от гармоник), и SNR (отношение сигнал шум) приемника.
А вот CORDIC не использует никаких таблиц, а производит чистое умножение на синус и косинус угла, т.е. осуществляет поворот вектора. Я не производил качественных и тем более количественных измерений смесителей, реализованных на умножитель+DDS и на CORDIC алгоритме, поэтому точно сказать не могу что лучше, знаю только что на слух вы там ничего не услышите это точно: о).
Однако, крутые дяди занимающиеся этой темой, чай не дубы, и наверное знают о чем говорят. Поэтому, можно с утверждением сказать, что CORDIC в качестве квадратурного смесителя лучше.
Как это работает
Нас как обычно, спасает логическое ядро CORDIC алгоритма от Xilinx. Там за нас уже все придумано, нам надо его только правильно настроить.
CORDIC от Xilinx в режиме поворота вектора, а это нам как раз и надо, вычисляет следующие уравнения:
X’ = cos (ф) * X – sin (ф) * Y
Y’ = cos (ф) * Y + sin (ф) * X
Но это нам не совсем подходит, нам нужны только косинус и синус. Поэтому на один из входов нам необходимо подать постоянно 0, тогда наши уравнения примут вид:
X’ = cos (ф) * X
Y’ = sin (ф) * X
Можно 0 подавать и на X, на выходе в этом случае будет минус синус. Если забегать вперед, обычно так и делается. Разницы тут конечно особой нет, просто минус синус позволяет согласовываться с БПФ если оно будет в системе, там в этом случае несколько получается попроще, но это уже другая история….
Что такое ф? Очевидно что это угол, на рисунке он обозначен как P, типа фаза – это одно и тоже. Диапазон изменения угла от –Пи до Пи. В реальности это не очень удобно, и при настройке ядра лучше использовать опцию нормализованного угла от -1.0 до 1.0.
Ну вот… Остается понять, что за аккумулятор фазы еще там приклеен. Аккумулятор фазы как раз и есть та штука, которая гонит в наш CORDIC угол ф. Точно так же как раньше DDS гнал отсчеты синуса или косинуса в умножитель, тут аккумулятор фазы гонит угол в CORDIC.
Дак что же это за аккумулятор такой?
Это обычный счетчик с индексом М. А индекс М – это наше слово частоты, меняя это слово, мы меняем скорость приращения фазы и как следствие перестраиваемся по частоте. Короче говоря, это точно такой же узел, который есть в DDS генераторе, или иными словами это тот же DDS генератор только без таблицы синуса.
Аккумулятор фазы, можно родить как самому, благо счетчик осилит каждый, так и использовать уже известное нам логическое ядро DDS генератора в режиме генератора фазы. С этим я думаю, вы разберетесь и сами, не забываем только о том, что у CORDIC алгоритма формат входных и выходных данных дробный. 1QN формат для входных и выходных данных и 2QN для угла. Подробнее, курим даташит…
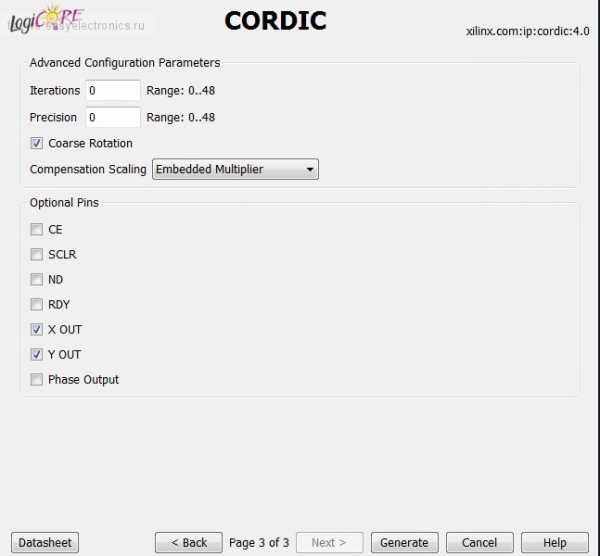
Пару слов о настройке CORDIC ядра:
Режим: вращение вектора (Rotate)
Структура: Конвейерный режим – иначе CORDIC не будет успевать считать семплы.
Формат фазы: Нормализованные радианы.
Обязательно поставить галку Corse Rotation – это включает модуль грубого поворота угла, иначе CORDIC будет считать только до Пи/4. А так же включить компенсацию масштаба, это повышает точность.
Выглядеть это может как то так:

А вот реализацию этого в реальном мире, я оставлю вам на домашнее задание.: о). Кто осилит, пишите: о)
Кстатии, есть даже DDS генераторы не на основе таблицы синуса, а на основе CORDIC алгоритма: о). Ресурсов это требует больше, но зато чистый спектр. Так, чета вспомнилось… к слову: о).
В принципе для радиолюбительских целей CORDIC можно и не юзать, все вполне работает и на связке умножитель+DDS.
Эти крутые дяди – такие крутые…
На последок еще пару слов как делают, и делать в принципе надо. Правда реализация такого в ПЛИС пока довольно сложна, лично я пока не осилил… Но есть к чему стремиться. Это обычно делают там, где попроще — в компьютерной программе.
Представим, что наш квадратурный сигнал мы взяли и подали на БПФ. Что это нам даст? Это нам даст спектр участка диапазона в реальном времени.
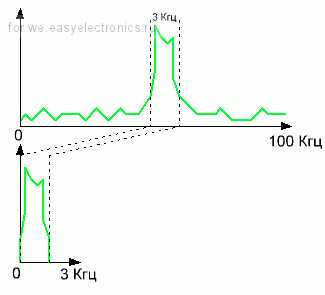
Нарисовано схематически и не в масштабе, чисто чтобы понять смысл. На этом спектре (верхний график) видно, что есть какой-то сигнал, и мы его хотим послушать. Как нам это сделать? Полоса пропускания приемника, всего 3Кгц, а сигнал на спектре находится в районе, к примеру на частоте 50 Кгц, т.е. частота гетеродина + 50 Кгц. Самый простой метод сместить частоту гетеродина на 50 Кгц вверх, чтобы этот сигнал оказался в полосе пропускания НЧ фильтра. Но это как бы не особо… и известно еще со времен Попова…
Но есть другой метод, не трогая частоту гетеродина, тупо взять и скопировать этот участок спектра прямо в полосу пропускания приемника. Сделать ОБПФ и радоваться…
Т.е. мы можем просматривать диапазон в реальном времени и слушать разные его участки, не трогая настройку приемника. Профит? Ага…: о). Это чисто на пальцах, там есть куча всяких подводных камней, но это уже совсем другая история… и выходит далеко за рамки простого цифрового приемника.
Ну вот, собственно и все на этот раз… Удачных экспериментов и дальнего приема: о). Надеюсь было интересно тем кому интересно: о).
Спасибо за внимание!
Для общего развития:
1. dspsys.org/vsa/23-iqdemod
2. www.dsplib.ru/content/quadosc/quadosc.html
3. www.paradiddle.us/custom-dsp-solutions/dsp-radio2
4. www.eurojournals.com/ejsr_30_4_03.pdf
5. www.mhprofessional.com/downloads/products/0071485473/SkolnikCh35.pdf
we.easyelectronics.ru
УПРАВЛЯЕМЫЙ ГЕНЕРАТОР КВАДРАТУРНЫХ СИГНАЛОВ
Изобретение относится к радиотехнике и связи и может быть использовано при построении управляемых генераторов.
Известен генератор [1 (с. 202 – рис. 4-16. «Электронный генератор с ограничением амплитуды колебаний»)], содержащий два интегратора, сумматор, нелинейный элемент (с релейной характеристикой) и два пассивных управляемых делителя, осуществляющих перестройку выходных колебаний по частоте. На выходе нелинейного элемента формируются биполярные импульсы прямоугольной формы с высоким содержанием высших нечетных гармоник. Биполярный прямоугольный сигнал подается по цепи обратной связи непосредственно на вход сумматора, поэтому на выходе первого интегратора будет сформирован сигнал, имеющий значительные нелинейные искажения.
Известен управляемый генератор [2 (с. 17 – рис. 1-9.)], который содержит два интегратора, два умножителя, нелинейный элемент и сумматор, к выходу которого подключен первый умножитель, управляющий вход которого соединен с управляющей шиной и управляющим входом второго умножителя, между выходом которого и первым входом сумматора включен второй интегратор, выход которого соединен со вторым выходом управляемого генератора, первый выход которого подключен к выходу первого интегратора, при этом нелинейный элемент включен между первым выходом управляемого генератора и вторым входом сумматора, а вход второго умножителя подключен к выходу первого интегратора.
Для стабилизации амплитуды используется нелинейный элемент, при этом коэффициент гармоник и стабильность амплитуды связаны обратной зависимостью, то есть уменьшение коэффициента гармоник за счет уменьшения степени нелинейности приводит к снижению стабильности амплитуды и, напротив, увеличение стабильности амплитуды ведет к увеличению гармоник в выходном сигнале. Сравнительно невысокие метрологические характеристики (стабильность амплитуды 1-2% при коэффициенте гармоник 0,5-1%) ограничивают применение таких генераторов [2 (с. 19)].
Наиболее близким устройством к заявленному изобретению по совокупности существенных признаков является, принятый за прототип, управляемый генератор [3], содержащий два интегратора, три умножителя, три квадратора, релейный элемент, ограничитель, два сумматора и инвертор, включенный между выходом третьего квадратора и третьим входом второго сумматора, выход которого соединен со вторым входом третьего умножителя, между выходом которого и первым входом первого сумматора включен ограничитель, при этом первый интегратор включен между выходом первого умножителя и первым входом второго умножителя, к выходу которого подключен вход второго интегратора, выход которого соединен со вторым входом первого сумматора, к выходу которого подключен первый вход первого умножителя, второй вход которого соединен со вторым входом второго умножителя и первой шиной управляемого генератора, вторая шина которого соединена с входом третьего квадратора, причем выходы первого и второго интеграторов соединены с соответствующими выходами управляемого генератора, первый квадратор включен между первым выходом управляемого генератора и первым входом второго сумматора, второй квадратор включен между вторым выходом управляемого генератора и вторым входом второго сумматора, а релейный элемент включен между первым выходом управляемого генератора и первым входом третьего умножителя.
На первом выходе генератора коэффициент нелинейных искажений превышает 0,05%, что не позволяет отнести данное устройство к прецизионным генераторам по данному показателю.
Задачей, на решение которой направлено изобретение, является повышение спектральной чистоты формируемых квадратурных гармонических сигналов.
Технический результат, достигаемый при осуществлении изобретения, заключается в повышении спектральной чистоты формируемых квадратурных гармонических сигналов путем введения дополнительных элементов и организации новых функциональных связей между элементами.
Указанный технический результат при осуществлении изобретения достигается тем, что в управляемый генератор квадратурных сигналов, содержащий первый и второй умножители, первый и второй интеграторы, первый и второй квадраторы, первый и второй сумматоры и инвертор, при этом первый квадратор включен между выходом первого интегратора и первым входом второго сумматора, второй квадратор 6 включен между выходом второго интегратора и вторым входом второго сумматора, к выходу первого сумматора подключен первый вход первого умножителя, выход которого соединен с входом первого интегратора, к выходу которого подключен первый вход второго умножителя, выход которого соединен с входом второго интегратора, выход которого соединен со вторым входом первого сумматора, при этом вторые входы первого и второго умножителей соединены с управляющей шиной, в него дополнительно введены первый и второй делители, блок извлечения квадратного корня, компаратор, и источник опорного напряжения, минусовой зажим которого соединен с общей шиной, а плюсовой – с инвертирующим входом компаратора, выход которого соединен с четвертым входом первого сумматора и третьим входом второго сумматора, между выходом которого и неинвертирующим входом компаратора включен блок извлечения квадратного корня, при этом инвертор включен между выходом первого интегратора и третьим входом первого сумматора, первый вход которого соединен выходом первого делителя и первым выходом управляемого генератора квадратурных сигналов, второй выход которого соединен с выходом второго делителя, первый вход которого подключен к выходу второго интегратора, причем выход блока извлечения квадратного корня соединен со вторыми входами первого и второго делителей, а первый вход первого делителя подключен к выходу первого интегратора.
Проведенный заявителем анализ уровня техники, включающий поиск по патентным и научно-техническим источникам информации, позволил установить, что заявитель не обнаружил аналог, характеризующийся признаками, тождественными всем существенным признакам заявленного изобретения. Следовательно, заявленное изобретение соответствует условию «новизна».
Введение в предлагаемый управляемый генератор квадратурных сигналов двух делителей, блока извлечения квадратного корня, компаратора и источника опорного напряжения, а также организация новых функциональных связей между элементами позволили повысить спектральную чистоту формируемых квадратурных гармонических сигналов.
Изобретение поясняется структурной схемой управляемого генератора квадратурных сигналов, изображенной на фиг. 1, и графиками, поясняющими принцип работы управляемого генератора квадратурных сигналов – на фиг. 2 и фиг. 3.
Управляемый генератор квадратурных сигналов содержит (фиг. 1) первый 1 и второй 2 умножители, первый 3 и второй интеграторы 4, первый 5 и второй 6 квадраторы, первый 7 и второй 8 сумматоры, инвертор 9, первый 10 и второй 11 делители, блок извлечения квадратного корня 12, компаратор 13 и источник опорного напряжения 14, минусовой зажим которого соединен с общей шиной, а плюсовой – с инвертирующим входом компаратора 13, выход которого соединен с четвертым входом первого сумматора 7 и третьим входом второго сумматора 8, между выходом которого и неинвертирующим входом компаратора 13 включен блок извлечения квадратного корня 12, при этом первый квадратор 5 включен между выходом первого интегратора 3 и первым входом второго сумматора 8, второй квадратор 6 включен между выходом второго интегратора 4 и вторым входом второго сумматора 8, а инвертор включен между выходом первого интегратора 3 и третьим входом первого сумматора 7, к выходу которого подключен первый вход первого умножителя 1, между выходом которого и первым входом второго умножителя 2 включен первый интегратор 3, причем выход блока извлечения квадратного корня 12 соединен со вторыми входами первого 10 и второго 11 делителей, шина управления соединена со вторым входом первого умножителя 1 и вторым входом второго умножителя 2, к выходу которого подключен вход второго интегратора 4, выход которого соединен со вторым входом первого сумматора 7, первый вход которого соединен с выходом первого делителя и первым выходом управляемого генератора квадратурных колебаний, второй выход которого соединен с выходом второго делителя 11, первый вход которого подключен к выходу второго интегратора 4, а первый вход первого делителя соединен с выходом первого интегратора 3.
Управляемый генератор квадратурных сигналов работает следующим образом.
Первый умножитель 1 и первый интегратор 3 образуют (фиг. 1) первый управляемый интегратор с передаточной функцией
где τУ1=τ1/(m1·EУ) – постоянная времени первого управляемого интегратора; τ1 – постоянная времени первого интегратора 3; m1 – масштабный коэффициент умножителя 1; EУ – управляющее напряжение; s – комплексная переменная.
Второй умножитель 2 и второй интегратор 4 образуют второй управляемый интегратор с передаточной функцией
где τУ2=τ2/(m2·EУ) – постоянная времени второго управляемого интегратора; τ2 – постоянная времени второго интегратора 4; m2 – масштабный коэффициент умножителя 2.
При одинаковых значениях масштабных коэффициентов m1=m2=m и при равенстве постоянных времени интеграторов τ1=τ2=τ0 также будут иметь одинаковые значения и постоянные времени первого и второго управляемых интеграторов τУ1=τУ2=τУ=τ0/(m·EУ).
Следовательно, и передаточные функции управляемых интеграторов в этом случае будут иметь одинаковые выражения
Умножители 1 и 2, интеграторы 3 и 4, сумматор 7 и инвертор 9 образуют управляемый фильтр (УФ). При подаче на первый вход сумматора 7, то есть на вход УФ сигнала N1(t), на выходе управляемого фильтра формируются два сигнала S1(t) и S2(t).
Для нахождения амплитудно-частотных и фазочастотных характеристик, а также определения резонансной частоты УФ, величины затухания и добротности фильтра найдем передаточные функции (ПФ) управляемого фильтра.
Найдем передаточную функцию УФ по первому W1(s) и второму W2(s) выходу при воздействии входного сигнала N1(t), для чего составим следующую систему уравнений в операторной форме:
где k1, k2 и k3 – коэффициенты первого сумматора 7 по соответствующим входам.
Используя метод исключения переменных в (4), запишем выражения для передаточной функции
и для передаточной функции
При k2=1 выражение (6) можно привести к классическому виду для колебательного звена с передаточной функцией
где ξ=k3/2 – коэффициент затухания, определяющий избирательные свойства звена.
Передаточную функцию W2(s) можно представить в виде последовательного соединения колебательного и дифференцирующего звеньев
Резонансную частоту ω0 управляемого фильтра можно найти из характеристического уравнения, для чего знаменатель в уравнениях (7) и (8) следует приравнять к нулю и найти корни этого уравнения
Для нахождения комплексно-частотных функций в выражениях (8) и (9) необходимо заменить комплексную переменную s→jω
Из (10) и (11) следует, что фазовый сдвиг между выходными сигналами S1(t) и S2(t) будет определяться только параметрами дифференцирующего звена с передаточной функцией WD(s)=τs, поскольку WD(jω)=j·ωτ.
Фазовый сдвиг
Из (12) следует, что фазовый сдвиг межу выходными сигналами S1(t) и S2(t) не зависит от частоты и во всем диапазоне рабочих частот составляет 90 электрических градусов.
Амплитудно-частотные характеристики
удобно представить в нормированном виде (фиг. 2), для чего введем в рассмотрение относительную расстройку по частоте
где ω0=1/τУ – резонансная частота.
После подстановки (15) в (13) и (14) получим
Графические зависимости коэффициентов передачи W1(ω) и W2(ω) от величины относительной расстройки δ приведены на фиг. 2. На резонансной частоте (при δ=1)
При равенстве коэффициентов k1=k3 коэффициенты передачи также будут равны W1(1)=W2(1)=1.
Спектральная чистота формируемых сигналов S1(t) и S2(t) будет зависеть как от формы сигнала N1(t), поступающего по цепи обратной связи, так и от добротности Q резонансной системы (управляемого фильтра), которая, в свою очередь, определяет (фиг. 2) полосу пропускания ППР фильтра.
Полосу пропускания ППР условно определяют по резонансной кривой (фиг. 2) на уровне 0,707 (-3 дБ) от ее максимального значения, соответствующего резонансной частоте.
Полоса пропускания управляемого фильтра
Добротность управляемого фильтра связана с коэффициентом затухания ξ следующим образом: Q=1/ξ=2/k3, следовательно, величину добротности Q, коэффициент затухания ξ и полосу пропускания ППР можно регулировать с помощью коэффициента k3, но при этом необходимо соблюдать равенство коэффициентов k1=k3.
В этом случае при любых значениях добротности на частоте резонанса амплитудные значения A1 и A2 сигналов S1(t) и S2(t) будут иметь одинаковые значения, равные единице, а фазовый сдвиг между ними составит 90 электрических градусов. Таким образом, на выходах управляемого фильтра формируются квадратурные сигналы стабильной амплитуды.
В предлагаемом решении на вход первого сумматора 7 подается квазигармонический сигнал N1(t) стабильной амплитуды A*, имеющий незначительное количество высших гармонических в своем составе.
Формирование сигнала обратной связи N1(t) происходит следующим образом.
Квадраторы 5 и 6, сумматор 8 и блок извлечения квадратного корня 12 образуют безынерционный датчик напряжения (ДН).
При подаче на вход квадратора 5 гармонического сигнала S1(t)=A1sin(ωt) на его выходе формируется сигнал
где m3 – масштабный коэффициент квадратора 5.
При подаче на вход квадратора 6 гармонического сигнала S2(t)=A2cos(ωt) на его выходе формируется сигнал
где m4 – масштабный коэффициент квадратора 6.
В результате суммирования сигналов L1(t) и L2(t) на выходе сумматора 8 образуется напряжение
На выходе блока извлечения квадратного корня 12, то есть на выходе ДН, формируется напряжение
При выполнении условий k3=k4=1, m3=m4=1 и при равенстве амплитудных значений A1=А2=A напряжение
то есть на выходе ДН напряжение будет в точности равно амплитудному значению Em=A.
На выходе делителя 10, то есть на первом выходе управляемого генератора квадратурных сигналов, формируется сигнал
где A*=1 – нормированное значение амплитуды сигнала N1(t).
Аналогично работает второй делитель 11, на выходе которого также формируется стабильный по амплитуде сигнал
Стабилизированный по амплитуде сигнал N1(t) 10 поступает на первый вход сумматора 7, замыкая цепь обратной связи и создавая условия для возбуждения гармонических колебаний.
Частота колебаний Ω0 в управляемом генераторе совпадает с резонансной частотой ω0=1/τУ и изменяется прямо пропорционально изменению управляющего напряжения EУ
Поскольку на вход управляемого фильтра с выхода первого делителя 10 подается гармонический сигнал, в котором практически нет высших гармонических составляющих, то спектральная чистота формируемых сигналов S1(t) и S2(t) намного выше, чем в прототипе.
Оценка нелинейных искажений выходных сигналов генератора проводилась на математической модели в программе PSIM-9. Нелинейные искажения на выходах управляемого генератора измерялись с помощью блока (THD – Total harmonic distortion) программы PSIM.
На первом выходе коэффициент нелинейных искажений не превысил 0,011%, что примерно в пять раз меньше по сравнению с прототипом.
На втором выходе управляемого генератора искажения сигнала N2(t) будут еще меньше из-за фильтрующего свойства второго интегратора 4. Незначительное содержание высших гармоник выходных сигналов N1(t) и N2(t) является достоинством предлагаемого генератора.
Для сокращения времени запуска генератора на четвертый вход сумматора 7 поступает корректирующий сигнал Sk(t) с формирователя одиночного импульса, который выполнен из компаратора 13 и источника опорного напряжения 14. Корректирующий сигнал Sk(t) подается также на третий вход сумматора 8, обеспечивая тем самым нормальную работу делителей 10 и 11, которые при отсутствии корректирующего сигнала формируют на своих выходах кратковременный выброс напряжения при запуске генератора и для устранения которого на выходах делителей 10 и 11 потребуются ограничители.
Введение корректирующего сигнала Sk(t) значительно улучшает динамику управляемого генератора как в пусковом режиме (фиг. 3), так и при переключении генератора с одной частоты на другую.
Длительность переходного процесса при запуске управляемого генератора квадратурных сигналов определяется (фиг. 3) длительностью ТИ корректирующего сигнала Sk(t) и значением коэффициента передачи по четвертому входу сумматора 7. Длительность TИ сигнала Sk(t) можно изменять с помощью напряжения смещения E0, поступающего на вход компаратора 13 от источника опорного напряжения 14.
Графические зависимости, поясняющие принцип уменьшения переходных процессов в генераторе, приведены на фиг. 3. На фиг. 3, а и фиг. 3, б показаны графики для случая, когда величина опорного напряжения E0=0,1 В, а коэффициент передачи сумматора по четвертому входу k4=0,1. На фиг. 3, в и фиг. 3, г показаны графики для случая, когда величина опорного напряжения E0=0,8 В, а коэффициент передачи сумматора по четвертому входу k4=1,0. На фиг. 3, д и фиг. 3, е показаны графики для случая, когда величина опорного напряжения Е0=0,9 В, а коэффициент передачи сумматора по четвертому входу k4=10,0.
Выбор наилучшего сочетания длительности TИ корректирующего сигнала Sk(t) и коэффициента передачи k4 сумматора 7 по четвертому входу позволил минимизировать длительность переходного процесса при запуске управляемого генератора квадратурных сигналов, а наличие делителей 10 и 11 позволило дополнительно стабилизировать амплитуды выходных сигналов N1(t) и N2(t). Следует отметить, что сигнал Sk(t) формируется только один раз при запуске генератора и в дальнейшей работе управляемого генератора участия не принимает.
Использование предлагаемого изобретения позволит повысить (по сравнению с аналогами и прототипом) спектральную чистоту формируемых квадратурных гармонических сигналов.
Источники информации
1. Вавилов А.А., Солодовников А.И. Экспериментальное определение частотных характеристик автоматических систем. M.-Л.: Госэнергоиздат, 1963 г. – 252 с.
2. Вавилов А.А., Солодовников А.И., Шнайдер В.В. Низкочастотные измерительные генераторы. – Л.: Энергоатомиздат, Ленингр. отделение, 1985 г. – 104 с.
3. Патент РФ №2506692, H03B 27/00. Дубровин B.C. Управляемый генератор, заявл. 31.08.2012, опубл. 10.02.2014. Бюл. №4.
Управляемый генератор квадратурных сигналов, содержащий первый и второй умножители, первый и второй интеграторы, первый и второй квадраторы, первый и второй сумматоры и инвертор, при этом первый квадратор включен между выходом первого интегратора и первым входом второго сумматора, второй квадратор включен между выходом второго интегратора и вторым входом второго сумматора, к выходу первого сумматора подключен первый вход первого умножителя, выход которого соединен с входом первого интегратора, к выходу которого подключен первый вход второго умножителя, выход которого соединен с входом второго интегратора, выход которого соединен со вторым входом первого сумматора, при этом вторые входы первого и второго умножителей соединены с управляющей шиной, отличающийся тем, что в него дополнительно введены первый и второй делители, блок извлечения квадратного корня, компаратор и источник опорного напряжения, минусовой зажим которого соединен с общей шиной, а плюсовой – с инвертирующим входом компаратора, выход которого соединен с четвертым входом первого сумматора и третьим входом второго сумматора, между выходом которого и неинвертирующим входом компаратора включен блок извлечения квадратного корня, при этом инвертор включен между выходом первого интегратора и третьим входом первого сумматора, первый вход которого соединен с выходом первого делителя и первым выходом управляемого генератора квадратурных сигналов, второй выход которого соединен с выходом второго делителя, первый вход которого подключен к выходу второго интегратора, причем выход блока извлечения квадратного корня соединен со вторыми входами первого и второго делителей, а первый вход первого делителя подключен к выходу первого интегратора.edrid.ru
