
Левитирующий магнит как новый путь к чистой энергии
Постепенно отступающий экономический кризис резко обозначил одну из главных современных проблем человечества – энергетическую. Методов решения её в виде технологий энергосбережения и использования возобновляемых источников предлагается множество, а одной из самых перспективных, но весьма отдалённых от практического внедрения заменой нынешним электростанциям считается термоядерный синтез. Эксперимент, воспроизводящий схожие с земными магнитные поля, подтверждает потенциал нового способа создания реактора для выработки энергии при помощи слияния ядер – такой же реакции, которая происходит на Солнце. Управляемая реакция синтеза является вожделенной мечтой физиков и других исследователей уже более полувека, потому как она предлагает практически неисчерпаемый источник энергии без выбросов соединений углерода и с намного меньшим радиоактивным загрязнением, чем в основанных на делении атомов АЭС. Однако построить реактор оказалось сложнее, чем считалось изначально. Продвинуть исследования помогут новые результаты от экспериментальной установки в Массачусетском технологическом институте (MIT), на разработку которой учёных вдохновили космические спутниковые наблюдения. В совместном проекте MIT и Колумбийского университета (Columbia University), называемом LDX (Levitated Dipole Experiment – Левитирующий дипольный эксперимент), используется кольцеобразный магнит массой полтонны и размером с покрышку от крупного грузовика. Он изготовлен из расположенных внутри стальной конструкции сверхпроводящих катушек, удерживается в “подвешенном” состоянии мощным электромагнитным полем и выполняет функцию контроля за перемещением заряженного газа – плазмы с температурой в 10 млн градусов, которая находится во внешней камере диаметром 4,9 м. Результаты показали, что внутри камеры случайные турбулентные процессы заставляют плазму становиться более плотной вместо расширения, а это увеличивает вероятность слияния ядер. Такое “турбулентное сжатие” наблюдается во время взаимодействия плазмы с магнитными полями Земли и Юпитера, но никогда ещё не воссоздавалось в лаборатории.

13 дизайн-объектов, нарушающих законы гравитации — Look At Me
Текст
Артём Лучко
Технологии, позволяющие вещам парить в воздухе, становятся доступнее с каждым годом. Нехитрые системы из магнитов способны привнести в дизайн современного пространства эстетику футуризма. Парящие шезлонги, левитирующие рамки для фотографий, летающие колонки — вовсе не бутафория из сай-фая, а реальные объекты, которые способны наполнить интерьер магией.
Летающий стол
Для кого-то, возможно, потребление пищи за обычным столом потеряло своё очарование. Именно для них дизайнер Яна Кристиаэнс разработала концепт необычного предмета мебели. По её задумке столешница непременно должна включать технологию, позволяющую ей парить в воздухе. Яну вдохновили поезда, которые для перемещения используют не старые, уже всем надоевшие колёса, а магнитную подвеску. Концепт подразумевает то, что вы сможете легко регулировать высоту стола, увеличивая или уменьшая силу магнитного поля.
Стол из магнитных кубов
Стол дизайн-студии RockPaperRobot состоит из 64 полых кубов, изготовленных из натуральной древесины и покрытых шпоном ценных пород. В каждый куб встроен магнит, а для дополнительной устойчивости конструкции все они соединены тонкими стальными тросиками. Благодаря хитроумному дизайну возникает полное ощущение того, что кубы левитируют в пространстве сами по себе. Правда, выдержать такой стол может только чуть более 2 кг.
Благодаря хитроумному дизайну возникает полное ощущение того, что кубы левитируют в пространстве сами по себе. Правда, выдержать такой стол может только чуть более 2 кг.
Облачный диван
Cloud Sofa — это концепт дизайнеров из студии D.K. & Wei, который представляет собой мягкий диван в виде облака, парящий над полом благодаря магнитной системе. Разумеется, пока предмет мебели существует лишь в фантазиях дизайнеров и на картинках в блогах, однако вполне вероятно, что лет через 10 он может стать реальным.
Однако компания Crealev не остановилась на разработке ламп. Запатентовав свою технологию, которая позволяет без каких-либо лесок и струн удерживать любой объект (или почти любой) весом до 10 кг, семейство Янсен начало внедрять её во множестве разных проектов по всему миру. В результате сотрудничества с художниками, рекламщиками и производителями техники миру явились ховерборд, левитирующий камень, парящие наушники, кроссовки и даже шляпы.
Ковёр-самолёт для питомца
Экспериментальное мебельное бюро MiCasa Lab (известное лампой, которая предсказывает погоду с помощью облака из азота, и мобильниками в виде пирсинга) разработали ковёр-самолёт для домашних животных. Секрет устройства — в шести неодимовых магнитах, благодаря которым он может поднять над землёй питомца (буквально на несколько сантиметров), чей вес не более 2,4 кг, а рост — не более 7 см. Планируется, что в следующей версии изделие будет поднимать животное весом до 10 кг и ростом до 20 см, но это в будущем.
Планируется, что в следующей версии изделие будет поднимать животное весом до 10 кг и ростом до 20 см, но это в будущем.
Парящая лампочка
Левитирующая лампочка Джеффа Либермана также не является предметом манипуляций в «Фотошопе». Источник света может висеть в воздухе долгие годы без физического контакта с зарядкой или батареей. Как ни странно, система левитации и схема беспроводного питания даёт лампочке возможность потреблять меньше половины энергии, требуемой для обычной лампы накаливания. Колба и корпус содержат систему, которая использует обратную электромагнитную связь, заставляя лампочку парить на высоте примерно 6 см.
Мышка из будущего
The Bat — это левитирующая компьютерная мышь, разработанная бюро KIBARDINDESIGN. Она делает всё то же, что и обычная мышь, но в добавок к этому может ещё и парить над столом на высоте 40 миллиметров (без нагрузки) или 10 мм под весом вашей руки (в 1 кг). В комплект входит довольно громоздкая база и мышь с двумя кнопками, окружённая магнитным кольцом. Футуристичное устройство якобы предназначено для того, чтобы уменьшить давление на срединный нерв запястья, который повреждается при длительном пользовании обычной мышкой.
Рамка для фото
Очередной бесполезный, но занятный аксессуар для рабочего стола вроде лава-лампы. Базовый блок позволяет левитировать различным небольшим объектам, которые продаются отдельно как «аксессуары» для системы. Например, вы можете использовать круглую рамку для фото, которая будет непрерывно вращаться, благодаря всё тому же магнитному полю.
Levitron — это ещё более универсальная игрушка, чем выше описанное устройство. Вы можете заставить летать почти любой предмет весом не более 100 граммов. Модель самолёта или фигурку любимого супергероя придётся лишь поставить на специальную подставку. Базовая платформа также имеет подсветку, которая придаёт дополнительную эффектность.
Летающая Bluetooth-колонка
Производитель аудиоаксессуаров OM Audio сделал смелый шаг, представив новую Bluetooth-колонку, которая способна парить в воздухе. OM/One — это беспроводная аудиосистема в виде небольшой сферы, которая левитирует за счёт магнитов. Мощность колонки — 3 Вт, уровень максимальной громкости – 110 дБ. Встроенного аккумулятора хватает на 15 часов непрерывного воспроизведения. По словам обозревателя Engadget, OM/One воспроизводит звук довольно качественно. В обычном режиме работы «база» подключается к электросети. Встроенный в шар микрофон позволяет использовать систему и в качестве устройства громкой связи, если подключить её к смартфону. В настоящее время Om Audio прибегла к краудфандингу для выхода на серийное производство аудиосистемы.
Парящие шахматы
Иллюзионист и физик-экспериментатор, известный под ником Brusspup на YouTube, использовал магнитный модуль, чтобы заставить парить самые разные объекты, например шахматную доску, подушку и модель корабля Хана Соло Тысячелетний сокол. Его ролики на YouTube действительно завораживают.
Левитирующий шезлонг
Британская компания Hoverit, разрабатывающая левитирующую мебель, создала удивительный лежак на магнитной подушке. Сделанный вручную шезлонг из прозрачного акрила игнорирует гравитацию благодаря четырём мощным магнитным базам. Однако представители компании заявили, что, помимо расслабляющего ощущения сродни парению в воздухе, магнитные волны могут вызвать головные боли. Так что этот проект к данному моменту остался не востребован.
Космическая солонка
Итальянский дизайнер Сон Моччи хочет, чтобы каждый обеденный стол выглядел как столовая космической эры. Его солонка и перечница представляют собой миниатюрные НЛО, зависшие над столом. В воздухе их удерживают неодимовые магнитные днища и специальная платформа.
Как сделать левитирующий магнит?
В некоторых продвинутых магазинах можно увидеть стенды с рекламой, на которых показываются интереснейшие эффекты, когда какая-то вещь с витрины или предмет с изображением бренда левитирует. Иногда добавляется вращение. Но такую установку вполне по силам сделать даже человеку без особого опыта в самоделках. Для этого нужен неодимовый магнит, который можно найти в запчастях от компьютерной техники.
Свойства магнита удивительны. Одно из таких свойств отталкиваться одинаковыми полюсами используется в левитирующих предметах, которые используются как поезда на магнитной подушке, забавные игрушки или основа для эффектных дизайн-объектов и др. Как сделать левитирующий объект на основе магнитов?
Магнитная левитация на видео
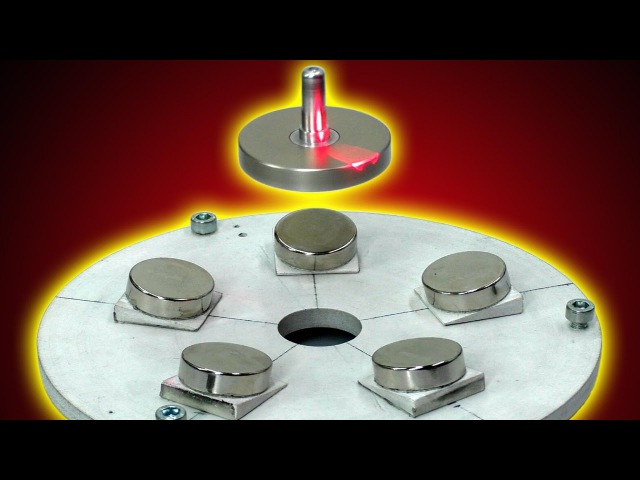
Левитация волчка над пятью точечными неодимовыми магнитами. Magnetic Levitation, magnétismo, magnetic experiment, truco magnética, moto perpetuo, amazing game. Занимательная физика.
Обсуждение
hawk
При вращении магнита присутствует левитация а если обороты магнита уменьшаются падает с орбиты… обоснуй этот эффект. Взаимодействие магнитных полей между магнитами это ясно но какая роль вращения. Можно переменным магнитным полем от катушек удерживать магнит в воздухе также.
pukla777
Просьба проработать тему – маховик генератор. Думаю она будет иметь полезное практичное применение. К тому же, оно у вас было очень давно снято в ролике, но очень мало и без информации.
RussiaPrezident
А что если:
Запустить этот волчок и каком нибудь кубе и создать там Вакуум, по идеи не будет сопротивления воздуха и он будет крутиться практически бесконечно! А если не него ещё и медь правильно накрутить и снимать энергию?
Евгений Петров
Читаю комментарии, удивлен, какая нитка!? Там все как есть магнитный волчок, ему задали мех. энергию и есть постоянное магнитное поле волчка при вращении которого вращается и магнитное поле, но главное как! В магнитах домены упакованы не равно распределено это технически не возможно поэтому сам магнит пассивный не может удержаться на магнитной подушке он уйдет на более сильную сторону где разница вообще мизерная, поэтому вращение поля не дает это сделать.
Вячеслав Субботин
Ещё идея, а что если светить лазером постоянно с одной стороны? Изменится ли время вращения волчка из-за давления света? Если взять сильный лазер, то может быть получится сделать, чтобы волчок вообще не останавливался.
Никто Неизвестный
Старая игрушка… я помню данный волчок и пластину под ним на ферритовых магнитах, на неодиме это уже скучно, причем нижний магнит основания представлял собой одну сплошную плиту, а не пять отдельных магнитов, только он был намагничен хитрым образом…
Алигарх Леопольд
Игорь Белецкий, можно сделать колпак на который будет приземляться волчёк, чтоб его не ловить. Можно ли к нему добавить вращающееся магнитное поле чтоб поддерживать вращение? к примеру если его магнитный стол вращать..
Тимур Аминев
А расскажите пожалуйста как магнитное поле Земли тормозит волчок? В смысле какие моменты сил направленные против вращения возникают и почему.
Александр Васильевич
Если сверху над магнитом (или снизу было бы вообще шикарно!) приделать катушку и подкручивать ею волчок, то получится некое подобие двигателя на магнитном подвесе. Вещь абсолютно бестолковая, но красивая. Крутиться будет пока источник питания не убрать))
Иван Петров
Ну это мы уже видели. Сделай так чтобы магнит левитировал без вращения! (и без опор и жидкого азота конечно).
Высокий эльф
Развод для двоечников, это можно было назвать левитацией, если магнит не надо было раскручивать. Сам магнит, что сверху, будет соскальзывать если ему не придать вращение.
Андрей Соломенников
А что если приделать на платформу огонь, а к гироскопу (Юле) пропеллеры, что бы вращалась пока горит огонь внизу.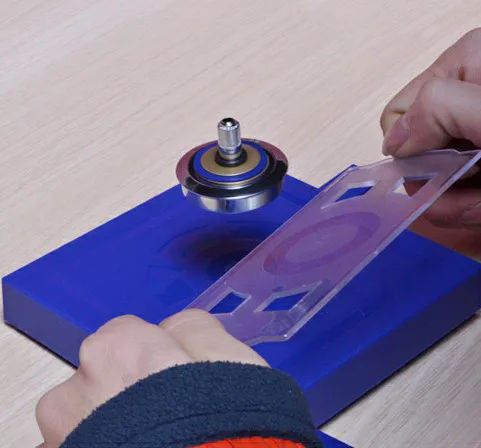 Не помню как называется двигатель, но суть его – вращение, так сказать, ротора при помощи тепла.
Не помню как называется двигатель, но суть его – вращение, так сказать, ротора при помощи тепла.
волжанин
Игорь,есть такая идея… У тебя на столе не равномерное магнитное поле,а если и волчок сделать из нескольких магнитиков, а стол раскрутить…Может и волчок не будет обороты терять… Как думаешь?..
Антон Симовских
Игорь Белецкий, разобрались в физике процесса? Почему левитация возможна лишь в динамике? Влияют ли на стабилизацию волчка токи фуко, в нем возникающие ?
Простейшая установка с левитирующим объектом на магните
Для этого понадобятся: бокс от СД-дисков, один или два диска, много кольцевых магнитов и супер-клей. Приобрести любой магнит можно в китайском интернет-магазине.
Когда к вам придут ваши друзья в гости, они удивятся эффектной конструкции, которую вы создали сами.
Totaledu OÜ
Totaledu OÜ- Товары
- Новости
- Kонтакты
- Скидки
- Поиск
- Mеханика
- Tермодинамика
- Oптика
- Mагнетизм
- электричество
- Hаборы
- Oбщий
- Mеталлические изделия
- Лаборатория посуда
- Pеагенты
- Прайс-лист
- Модели
- GLOBE товары
- Cлайд
- Hастенные kарты
- биологическиe
- Cтереоскопическиe
- Aксессуары
- Комплекты с беспроводными датчиками
- Беспроводные датчики
- Устройства сбора данных
- Проводные датчики
- Программное обеспечение
- Наборы с LabQuest
- Дополнительное оборудование
- Термометры
- измерение времени
- Длина
- объемы
- pH
- электрическиe
Навигация
- Товары
- Новости
- Kонтакты
- Скидки
- Поиск
Информация
- Общие условия
- О нас
- Политика конфиденциальности
Таллиннский офис
- Пожалуйста, позвоните заранее для посещения
- Vana-Kalamaja 34-122, Tallinn 10415
- +372 65 65 345
- tallinn@total.
 ee
ee
Тартуский офис
- Пожалуйста, позвоните заранее для посещения
- Ravila 63, Tartu 50411
- +372 7 331 112
- [email protected]
Вязкое сопротивление жидкости заставило магнитную «блоху» левитировать
K. Baldwin et al. / Phys. Rev. Lett.
Физики из Германии и Британии открыли новый эффект в магнитных мешалках — оказывается, перемешивающая жидкость «блоха» левитирует в жидкости, если ее вязкость превышает определенное значение. Ученые не только экспериментально определили вязкость, частоту вращения и высоту стакана, при которой «блоха» начинает левитировать, но и объяснили наблюдаемое явление теоретически. Статья опубликована в Physical Review Letters, кратко о ней сообщает Physics, препринт работы выложен на сайте arXiv.org.
Магнитная мешалка была изобретена в 1942 году и с тех пор ее конструкция практически не изменилась. В самой простой форме это устройство состоит из двух цилиндрических постоянных магнитов, находящихся в параллельных плоскостях и ориентированных так, чтобы южный полюс одного из магнитов совпадал с северным полюсом второго магнита (и наоборот). Нижний магнит располагается под дном стеклянного стакана, а верхний помещается в налитую в стакан жидкость; когда нижний магнит вращается под действием электромотора, верхний магнит также раскручивается и перемешивает жидкость. Если раскрутить мешалку слишком быстро, верхний магнит начинает хаотично двигаться и подпрыгивать — поэтому его обычно называют «блохой» («flea») или «якорем». Благодаря своему удобству магнитные мешалки широко используются в биологии и химии — в интернете такую мешалку можно купить всего за 100–200 долларов.
Благодаря своему удобству магнитные мешалки широко используются в биологии и химии — в интернете такую мешалку можно купить всего за 100–200 долларов.
Тем не менее, даже такие простые и, казалось бы, хорошо изученные устройства могут иногда повести себя совершенно неожиданно. Пример такого неожиданного поведения открыла и изучила группа ученых под руководством Дэвида Фэрхерста (David Fairhurst) — однажды, смешивая в магнитной мешалке полимер и воду, Фэрхерст заметил, что «блоха» левитирует в центре стакана вместо того, чтобы вращаться около его дна. Затем физики изучили это случайное открытие более пристально — наливали в стакан жидкости с различной вязкостью, приподнимали его над нижним магнитом и увеличивали скорость вращения — а потом построили численную модель и объяснили наблюдаемые процессы теоретически.
Схема «магнитной мешалки», которую ученые использовали в эксперименте
K. Baldwin et al. / Phys. Rev. Lett.
В результате ученые обнаружили, что поведение мешалки описывается одним из трех сценариев. Во-первых, если вязкость жидкости сравнительно невелика (η < 0,4 паскалей на секунду) — например, если в стакан налита вода, — то «блоха» хаотически движется и прыгает, как в классических экспериментах, в честь которых она получила свое название. Во-вторых, в более вязких жидкостях (η > 0,4 паскалей на секунду) «блоха» теряет энергию из-за трения и отстает от нижнего магнита, то есть скорость ее вращения ωs оказывается ниже скорости вращения электромотора ωd; при этом на периодическое вращение накладываются «подрагивания» с частотой ωw. Если точнее, угол поворота «блохи» подчиняется эмпирическому закону θ = ωst + Asin(ωwt), где A — амплитуда «подрагиваний». При увеличении частоты ωd частота вращения «блохи» и амплитуда «подрагиваний» уменьшается, а частота ωw растет (более точная зависимость приведена на графике). Наконец, если стакан с вязкой жидкостью (η > 0,4 паскалей на секунду) пододвинуть к нижнему магниту на расстояние z < 4 сантиметров, «блоха» останется подвешенной в толще жидкости вместо того, чтобы упасть на дно стакана. Правда, для этого скорость вращения электромотора не должна опускаться ниже 63 радиан в секунду — иначе частота «подрагиваний» сравнивается с основной частотой вращения «блохи», и она падает на дно стакана.
При увеличении частоты ωd частота вращения «блохи» и амплитуда «подрагиваний» уменьшается, а частота ωw растет (более точная зависимость приведена на графике). Наконец, если стакан с вязкой жидкостью (η > 0,4 паскалей на секунду) пододвинуть к нижнему магниту на расстояние z < 4 сантиметров, «блоха» останется подвешенной в толще жидкости вместо того, чтобы упасть на дно стакана. Правда, для этого скорость вращения электромотора не должна опускаться ниже 63 радиан в секунду — иначе частота «подрагиваний» сравнивается с основной частотой вращения «блохи», и она падает на дно стакана.
Зависимость частоты вращения «блохи» (круги), частоты «подрагиваний» (треугольники) и амплитуды «подрагиваний» (квадраты) от частоты вращения электромотора
K. Baldwin et al. / Phys. Rev. Lett.
Чтобы объяснить левитацию «блохи», ученые построили простую теоретическую модель, которая описывает вертикальные силы, действующие на цилиндр. Эта модель показывает, что основная причина, по которой «блоха» остается подвешенной в жидкости — отставание ее вращения от вращения нижнего магнита, из-за которого одноименные полюса магнитов время от времени оказываются друг над другом. Рассчитанные с помощью этой модели положения «блохи» совпадают с результатами эксперимента, что указывает на ее правдоподобность.
Зависимость средней высоты «блохи» от частоты вращения электромотора: серые точки отвечают случаю неконтролируемого «выскакивания», пустые точки — случаю вращения на дне, цветные точки — левитации. Сплошная черная линия — теоретически рассчитанная зависимость высоты левитирующей «блохи»
K. Baldwin et al. / Phys. Rev. Lett.
Baldwin et al. / Phys. Rev. Lett.
Тем не менее, модель также предсказывает, что «блоха» будет дестабилизироваться и выскакивать из положения равновесия из-за колебаний в горизонтальной плоскости. Чтобы объяснить, почему такая дестабилизация не происходит, физики численно смоделировали поведение жидкости, обтекающей вращающийся цилиндр. Оказалось, что «блоха» удерживается около оси стакана благодаря «подрагиваниям», которые на первый взгляд казались побочным эффектом, — они «откачивают» вязкую жидкость из центра цилиндра и создают центростремительную силу, которая стабилизирует его вращение. Напротив, в менее вязких жидкостях потоки направлены к цилиндру — это выводит «блоху» из равновесия и заставляет ее выскакивать из положения равновесия.
Численно рассчитанные направления потоков воды вокруг «блохи», которые вызываются «искусственными подрагиваниями» ее концов в плоскости, перпендикулярной плоскости рисунка
K. Baldwin et al. / Phys. Rev. Lett.
Численно рассчитанные направления потоков воды вокруг «блохи» для различных чисел Рейнольдса
K. Baldwin et al. / Phys. Rev. Lett.
Теорема Ирншоу утверждает, что подвесить намагниченные частицы в статическом магнитном поле, не прибегая к внешним силам, невозможно. Именно поэтому авторам статьи пришлось закручивать частицы и стабилизировать их с помощью силы вязкости. Тем не менее, магнитная левитация — это не единственный способ заставить объекты парить в воздухе; в частности, в последнее время физики и инженеры активно разрабатывают акустические левитаторы, которые удерживают небольшие объекты с помощью звуковых волн. Так, в 2015 году исследователям впервые удалось подвесить с помощью направленного луча пластмассовый шарик диаметром около четырех миллиметров, в 2016 году они увеличили диаметр шарика до пяти сантиметров, а в 2018 году научились передвигать его в пространстве. Более того, акустические левитаторы уже находят практические применения — с их помощью можно переносить еду по воздуху, спаивать детали микросхем и создавать объемные изображения, напоминающие «голограммы» из «Звездных войн» или других научно-фантастических фильмов.
Так, в 2015 году исследователям впервые удалось подвесить с помощью направленного луча пластмассовый шарик диаметром около четырех миллиметров, в 2016 году они увеличили диаметр шарика до пяти сантиметров, а в 2018 году научились передвигать его в пространстве. Более того, акустические левитаторы уже находят практические применения — с их помощью можно переносить еду по воздуху, спаивать детали микросхем и создавать объемные изображения, напоминающие «голограммы» из «Звездных войн» или других научно-фантастических фильмов.
Дмитрий Трунин
Как сделать левитрон своими руками | Своими руками | Блог школы
Что такое левитрон?
Левитрон — это игрушка, демонстрирующая левитацию крутящегося волчка, в котором расположен неодимовый магнит над ферритовым магнитом большего деаметра. Выглядит это удивительно!
Материалы для изготовления Левитрона
Итак, нам понадобится для изготовления игрушки три магнита в форме колец, обладающие достаточной мощностью. Вполне подойдут для нашей цели магниты из низкочастотных динамиков, срок службы которых давно истек.
Для того чтобы сделать волчок, будет нужен неодимный магнит. Взять его можно из динамика, на котором имеется надпись«Neodium transducer». Применяются подобные динамики в сотовых. Самый сильный постоянный магнит сегодня – это неодимный, созданный из сплава, в который входят неодим, бор и железо. Высокая температура негативно повлияет на него, поэтому этот магнит следует беречь от нагревания. Итак, магнит из сотового телефона может оказаться двух видов – в виде круглой пластинки или же в виде кольца. Кольцевой магнит одевается на сам волчок строго по центру, а магнит в форме таблетки приклеивается на ось волчка снизу. Материалом для самого волчка должен служить легкий материал, такой как композит или пластмасса.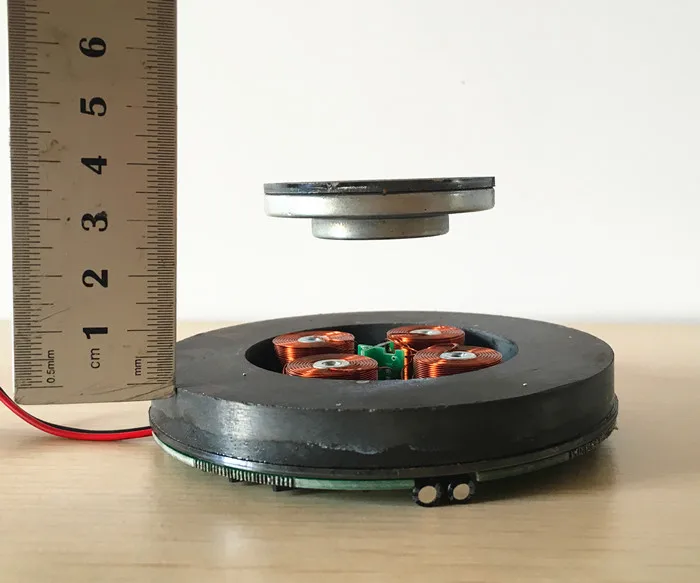
Настройка левитрона
К настройке следует подойти с особой скрупулезностью, ведь эта часть работы имеет решающее значение и является наиболее трудоемкой. Кольцевые магниты должны быть соединены между собой разнополярными сторонами. Сверху на них следует установить пластину (не из металла) толщиной до 1 см. Волчок аккуратно будет установлен в основание левитрона – центр магнита. Если Вы заметили, что волчок отклоняется в сторону, значит, магнит нужно заменить на другой, с большим диаметром.
Чтобы запустить волчок, понадобятся еще несколько элементов, с помощью которых можно будет регулировать толщину платформы, чтобы достичь нормального вращения волчка. Нам понадобится пластика из оргстекла с бумажными листами. Если волчок крутится нормально, начинаем плавно приподнимать платформу, пока он не взлетит вверх.
Если наш волчок подлетает с излишней стремительностью, следует увеличить его вес. Если же он отклоняется в одну сторону, то исправить ситуацию можно, подложив бумажные листы под противоположную. Эти действия позволяют настроить основу нашей игрушки, так чтобы она находилась четко на уровне моря.
И видео с левитронами…
Магнитная левитация своими руками на постоянных магнитах
На идею этого урока натолкнул проект краудфандинговой платформы Kickstarter под названием “Air Bonsai”, действительно красивый и загадочный, который сделали японцы.
Но любая загадка может быть объяснена, если посмотреть внутрь. Фактически это магнитная левитация, когда есть объект, левитирующий сверху, и электромагнит, контролируемый схемой. Давайте попробуем вместе реализовать этот загадочный проект.
Шаг 1: Как это работает
Мы выяснили, что схема устройства на Кикстартере была довольно сложной, без какого-либо микроконтроллера. Не было возможности найти её аналоговую схему. На самом деле, если посмотреть более внимательно, принцип левитации довольно прост. Нужно сделать магнитную деталь, “плавающую” над другой магнитной деталью. Основная дальнейшая работа заключалась в том, чтобы левитирующий магнит не падал.
Основная дальнейшая работа заключалась в том, чтобы левитирующий магнит не падал.
Было также предположение, что сделать это с Arduino на самом деле намного проще, чем пытаться понять схему японского устройства. На самом деле всё оказалось намного проще.
Магнитная левитация состоит из двух частей: базовой части и плавающей (левитирующей) части.
Основание
Эта часть находится внизу, которая состоит из магнита для создания круглого магнитного поля и электромагнитов для управления этим магнитным полем.
Каждый магнит имеет два полюса: север и юг. Эксперименты показывают, что противоположности притягиваются и одинаковые полюса отталкиваются. Четыре цилиндрических магнита помещаются в квадрат и имеют одинаковую полярность, образуя круглое магнитное поле вверх, чтобы вытолкнуть любой магнит, который имеет один и тот же полюс между ними.
Есть четыре электромагнита вообще, они помещены в квадрат, два симметричных магнита – пара, и их магнитное поле всегда противоположно. Датчик Холла и цепь управляют электромагнитами. Создаем противоположные полюса на электромагнитах током через них.
Плавающая деталь
Деталь включает в себя магнит, плавающий над основанием, который может нести небольшой горшок с растением или другие предметы.
Магнит сверху поднимается магнитным полем нижних магнитов, потому что они с одинаковыми полюсами. Однако, как правило, он склоняется к падению и притягиванию друг к другу. Чтобы предотвратить переворот и падение верхней части магнита, электромагниты создадут магнитные поля, чтобы толкать или тянуть, дабы сбалансировать плавающую часть, благодаря датчику Холла. Электромагниты управляются двумя осями X и Y, в результате чего верхний магнит поддерживается сбалансированным и плавающим.
Контролировать электромагниты нелегко, требуется ПИД-регулятор, который подробно обсуждается на следующем шаге.
Шаг 2: ПИД-регулятор (PID)
Из Википедии: “Пропорционально-интегрально-дифференцирующий (ПИД) регулятор — устройство в управляющем контуре с обратной связью. Используется в системах автоматического управления для формирования управляющего сигнала с целью получения необходимых точности и качества переходного процесса. ПИД-регулятор формирует управляющий сигнал, являющийся суммой трёх слагаемых, первое из которых пропорционально разности входного сигнала и сигнала обратной связи (сигнал рассогласования), второе — интеграл сигнала рассогласования, третье — производная сигнала рассогласования.”
Используется в системах автоматического управления для формирования управляющего сигнала с целью получения необходимых точности и качества переходного процесса. ПИД-регулятор формирует управляющий сигнал, являющийся суммой трёх слагаемых, первое из которых пропорционально разности входного сигнала и сигнала обратной связи (сигнал рассогласования), второе — интеграл сигнала рассогласования, третье — производная сигнала рассогласования.”
В простом понимании: «ПИД-регулятор вычисляет значение «ошибки» как разность между измеренным [Входом] и желаемой установкой. Контроллер пытается свести к минимуму ошибку, отрегулировав [выход]».
Итак, вы указываете PID, что измерить (Вход), какое значение вы хотите и переменную, которая поможет иметь это значение на выходе. Далее ПИД-регулятор настраивает выходной сигнал, чтобы сделать вход равным установке.
В данном проекте:
- Вход представляет собой текущее значение в реальном времени от датчика холла, которое обновляется непрерывно, поскольку положение плавающего магнита будет меняться в реальном времени.
- Заданное значение – это значение от датчика холла, которое измеряется, когда плавающий магнит находится в положении баланса, в центре основания магнитов. Этот индекс фиксирован и со временем не изменяется.
- Выходной сигнал – скорость для управления электромагнитами.
Стоит поблагодарить сообщество любителей Arduino, которое написало PID-библиотеку и которая очень проста в использовании. Дополнительная информация об Arduino PID есть на официальном сайте Arduino. Нам нужно использовать пару ПИД-регуляторов под Arduino, один для оси X и другой для оси Y.
Шаг 3: Комплектующие
Список комплектующих для урока получается приличным. Ниже приведен список компонентов, которые вы должны купить для этого проекта, убедитесь, что у вас есть все перед запуском. Некоторые из компонентов очень популярны, и, вероятно, вы найдете их на своем собственном складе или дома.
- 1x – LM324N
- 4x – левитационная катушка
- 2x – SS495a датчик Холла
- 1x – 12V 2A DC адаптер
- 8x – Кольцевой магнит D15*4 мм
- 1x – Разъем питания постоянного тока
- 4x – Кольцевой магнит D15*3 мм
- 1x – Arduino pro mini
- 1x – Модуль L298N
- 1x – 14 гнездовой сокет
- 2x – Магнит D35*5мм
- 2x – Резистор 5.6 KОм
- 2x – Резистор 180 КОм
- 2x – Резистор 47 KОм
- 2x- 10 Kом потенциометр
- 1x – Акриловый лист A5 размера
- 1x – Деревянный горшок
- 1x – PCB макет
- 8x – 3 мм винт
- провода
- Мини-растение (суккулент, кактус, мини-бонсай, карликовое дерево)
Шаг 4: Инструменты
Вот список инструментов, наиболее часто используемых:
- Паяльник
- Ручная пила
- Мультиметр
- Дрель
- Осциллограф (по желанию, можете использовать мультиметр)
- Настольное сверло
- Горячий клей
- Плоскогубцы
Шаг 5: LM324 Op-amp, L298N драйвер и SS495a
LM324 Op-amp
Операционные усилители (op-amp) являются одними из наиболее важных, широко используемых и универсальных схем, используемых сегодня.
Мы используем операционный усилитель для усиления сигнала от датчика Холла, цель которого – увеличить чувствительность, чтобы ардуино легко распознало изменение магнитного поля. Изменение нескольких мВ на выходе датчика холла, после прохождения усилителя может измениться на несколько сотен единиц в Arduino. Это необходимо для обеспечения плавного и стабильного функционирования ПИД-регулятора.
Обычным операционным усилителем, который мы выбрали, является LM324, это дешево, и вы можете купить его в любом магазине электроники. LM324 имеет 4 внутренних усилителя, которые позволяют гибко его использовать, однако в этом проекте нужны только два усилителя: один для оси X, а другой для оси Y.
Модуль L298N
Двойной H-мост L298N обычно используется для управления скоростью и направлением двух двигателей постоянного тока или с легкостью управляет одним биполярным шаговым двигателем. L298N может использоваться с двигателями с напряжением от 5 до 35 В постоянного тока.
L298N может использоваться с двигателями с напряжением от 5 до 35 В постоянного тока.
Существует также встроенный регулятор 5V, поэтому, если напряжение питания до 12 В, вы также можете подключить источник питания 5 В от платы.
В этом проекте использован L298N для управления двумя парами катушек электромагнита и использован выход 5 В для питания Arduino и датчика холла.
- Out 2: пара электромагнитов X
- Out 3: пара электромагнитов Y
- Входное питание: вход постоянного тока 12 В
- GND: Земля
- Выход 5v: 5v для датчиков Arduino и холла
- EnA: Включает сигнал PWM для выхода 2
- In1: Включить для выхода 2
- In2: Enable for Out 2
- In3: Включить для выхода 3
- In4: Включить для выхода 3
- EnB: Включает PWM-сигнал для Out3
Подключение к Arduino: нам нужно удалить 2 перемычки в контактах EnA и EnB, затем подключить 6 контактов In1, In2, In3, In4, EnA, EnB к Arduino.
SS495a Датчик Холла
SS495a – это линейный датчик Холла с аналоговым выходом. Обратите внимание на разницу между аналоговым выходом и цифровым выходом, вы не можете использовать датчик с цифровым выходом в этом проекте, он имеет только два состояния 1 или 0, поэтому вы не можете измерить выход магнитных полей.
Аналоговый датчик приведет к диапазону напряжений от 250 до Vcc, который вы можете прочитать с помощью аналогового входа Arduino. Для измерения магнитного поля в обеих осях X и Y требуются два датчика холла.
Шаг 6: Неодимовые магниты NdFeB (неодим-железо-бор)
Из Википедии: “Неодим — химический элемент, редкоземельный металл серебристо-белого цвета с золотистым оттенком. Относится к группе лантаноидов. Легко окисляется на воздухе. Открыт в 1885 году австрийским химиком Карлом Ауэром фон Вельсбахом. Используется как компонент сплавов с алюминием и магнием для самолёто- и ракетостроения.”
Неодим – это металл, который является ферромагнитным (в частности, он показывает антиферромагнитные свойства), что означает, что подобно железу его можно намагнитить, чтобы он стал магнитом. Но его температура Кюри составляет 19К (-254 ° С), поэтому в чистом виде его магнетизм проявляется только при чрезвычайно низких температурах. Однако соединения неодима с переходными металлами, такими как железо, могут иметь температуры Кюри значительно выше комнатной температуры, и они используются для изготовления неодимовых магнитов.
Но его температура Кюри составляет 19К (-254 ° С), поэтому в чистом виде его магнетизм проявляется только при чрезвычайно низких температурах. Однако соединения неодима с переходными металлами, такими как железо, могут иметь температуры Кюри значительно выше комнатной температуры, и они используются для изготовления неодимовых магнитов.
Сильный – это слово, которое используют для описания неодимового магнита. Вы не можете использовать ферритовые магниты, потому что их магнетизм слишком слаб. Неодимовые магниты намного дороже ферритовых магнитов. Маленькие магниты используются для основы, большие магниты для плавающей/левитирующей части.
Шаг 7: Готовим основание
Использовали небольшой терракотовый горшок, который обычно используется для выращивания суккулента или кактуса. Вы также можете использовать керамический горшок или деревянный горшок, если они подходят. Используйте сверло диаметром 8 мм, чтобы создать отверстие в нижней части горшка, которое используется для удерживания гнезда постоянного тока.
Шаг 8: 3D-печать плавающей части
Если у вас есть 3D-принтер – здорово. У вас есть возможность сделать все с помощью него. Если принтера нет – не отчаивайтесь, т.к. вы можете использовать дешевую услугу 3D-печати, которая сейчас очень популярна.
Для лазерной резки файлы также в архиве выше – файл AcrylicLaserCut.dwg (это autocad). Акриловая деталь используется для поддержки магнитов и электромагнитов, остальные – для покрытия поверхности терракотового горшка.
Шаг 9: Подготовка SS495a модуля датчика Холла
Вырежьте макет PCB на две части, одну часть, чтобы прикрепить датчик холла, а другой – к цепи LM324. Прикрепите два магнитных датчика перпендикулярно печатной плате. Используйте тонкие провода для соединения двух штырей датчиков VCC вместе, сделайте то же самое с контактами GND. Выходные контакты отдельно.
Шаг 10: Цепь Op-amp
Припаяйте гнездо и резисторы к печатной плате, следуя схеме, обратив внимание на то, чтобы поместить два потенциометра в одном направлении для более легкой калибровки позже. Присоедините LM324 к гнезду, затем подключите два выхода модуля датчиков холла к цепи op-amp.
Присоедините LM324 к гнезду, затем подключите два выхода модуля датчиков холла к цепи op-amp.
Два выходных провода LM324 подключите к Arduino. Вход 12 В с входом 12 В модуля L298N, выход 5 В модуля L298N к 5V потенциометра.
Шаг 11: Сборка электромагнитов
Соберите электромагниты на акриловый лист, они закреплены в четырех отверстиях вблизи центра. Затяните винты, чтобы избежать движения. Поскольку электромагниты симметричны по центру, они всегда находятся на полюсах напротив, так что провода на внутренней стороне электромагнитов соединены вместе, а провода на внешней стороне электромагнитов подключены к L298N.
Протяните провода под акриловым листом через соседние отверстия, чтобы подключиться к L298N. Медный провод покрыт изолированным слоем, поэтому вы должны удалить его ножом, прежде чем вы сможете припаять их вместе.
Шаг 12: Сенсорный модуль и магниты
Используйте горячий клей для фиксации модуля датчика между электромагнитами, обратите внимание, что каждый датчик должен быть квадратным с двумя электромагнитами, один на передней и другой на задней панели. Попробуйте выполнить калибровку двух датчиков как можно более централизованно, чтобы они не перекрывались, что сделает датчик наиболее эффективным.
Следующий шаг – собрать магниты на акриловой основе. Объединяя два магнита D15*4 мм и магнит D15*3 мм вместе, чтобы сформировать цилиндр, это приведет к тому, что магниты и электромагниты будут иметь одинаковую высоту. Соберите магниты между парами электромагнитов, обратите внимание, что полюса восходящих магнитов должны быть одинаковыми.
Шаг 13: Разъем питания постоянного тока и выход L298N 5V
Припаяйте гнездо питания постоянного тока двумя проводами и используйте термоусадочную трубку. Подключенный разъем питания постоянного тока к входу модуля L298N, его выход 5 В будет подавать питание на Arduino.
Шаг 14: L298N и Arduino
Подключите модуль L298N к Arduino, следуя приведенной выше схеме:
L298N → Ардуино
5V → VCC
GND → GND
EnA → 7
В1 → 6
В2 → 5
В3 → 4
В4 → 3
EnB → 2
Шаг 15: Arduino Pro Mini программер
Поскольку у Arduino pro mini нет USB-порта для последовательного порта, вам необходимо подключить внешний программатор. FTDI Basic будет использоваться для программирования (и питания) Pro Mini.
FTDI Basic будет использоваться для программирования (и питания) Pro Mini.
Шаг 16: Подготовка плавающей части
Соедините два магнита D35*5 для увеличения магнетизма.
Шаг 17: Калибровка
Загрузите программу ReadSetpoint.ino в Arduino, которую можно скачать выше. Эта программа будет считывать значения датчика Холла и отправлять их на компьютер через последовательный порт. Откройте COM-порт, чтобы увидеть его. Подключите 12 В постоянного тока к гнезду питания постоянного тока, вы также используете осциллограф для считывания значения датчика.
Наблюдайте значения на экране и внесите корректировки, установив два потенциометра. Наилучшее значение – 560, при этом выход датчика составляет около 2,5 В. После установки заданного значения поместите плавающий магнит над базовой частью и встряхните его, чтобы увидеть изменение значения установки (Setpoint) на экране.
Шаг 18: Загрузка основной программы
После калибровки значения установки (Setpoint) самое время получить результаты. Загрузите основную программу Levitation.ino, которая приведена выше.
Используйте супер клей для фиксации магнита и держателя магнита, который ранее был напечатан на 3D-принтере. После загрузки основной программы вы можете внести небольшие корректировки на потенциометры, чтобы плавающая деталь была зафиксирована в центре.
Шаг 19: Собираем всё вместе
Сначала прикрепите гнездо питания постоянного тока к горшку, затем поместите оставшиеся части в горшок. Наконец, используйте оставшийся акриловый лист, чтобы сделать поверхность горшка.
Шаг 20: Подготовка растения
Прикрепите деревянный горшок к плавающей части магнита. Мы использовали маленький кактус для посадки. Вы можете использовать кактус или суккулент или любой мини-бонсай, который является маленьким и легким.
Шаг 21: Финальный результат
Наслаждайтесь своим результатом, благодаря вашим усилиям вы сделали отличный проект, который теперь будет радовать вас и ваших друзей.
0.Предисловие
Начитался тут всяких интернетов и решил сваять свой собственный левитрон, без всяких цифровых глупостей. Сказано – сделано. Выкладываю муки творчества на всеобщее обозрение.
1.Краткое описание
Левитрон – это устройство, удерживающее объект в равновесии с силами гравитации с помощью магнитного поля. Давно известно, что невозможно левитировать объект, используя статичные магнитные поля. В школьной физике это называлось состоянием неустойчивого равновесия, насколько я помню. Однако, затратив немного желания, знаний, усилий, денег и времени, возможно левитировать объект динамически путем использования электроники в качестве обратной связи.
Получилось вот что:
2.Фунциональная схема
Электро-магнитные датчики, расположенные на торцах катушки, выдают напряжение, пропорциональное уровню магнитной индукции. В случае отсутствия внешнего магнитного поля эти напряжения будут одинаковы вне зависимости от величины тока катушки.
При наличии постоянного магнита вблизи нижнего датчика блок управления будет формировать сигнал, пропорциональный полю магнита, усиливать его до нужного уровня и передавать на ШИМ для управления током через катушку. Таким образом, возникает обратная связь и катушка будет генерировать такое магнитное поле, которое будет удерживать магнит в равновесии с силами гравитации.
Что-то заумно все получилось, попробую по другому:
— Нет никакого магнита — индукция на торцах катушки одинакова — сигнал с датчиков одинаков — блок управления выдает минимальный сигнал — катушка работает на всю мощь;
— Близко поднесли магнит — индукция сильно разная — сигналы от датчиков сильно разные — блок управления выдает максимальный сигнал — катушка отключается совсем — магнит никто не держит и он начинает падать;
— Манит падает — отдаляется от катушки — разница сигналов с датчиков уменьшается — блок управления уменьшает выходной сигнал — ток через катушку увеличивается — увеличивается индукция катушки — магнит начинает притягиваться;
— Манит притягивается — приближается к катушке — разница сигналов с датчиков увеличивается — блок управления увеличивает выходной сигнал — ток через катушку уменьшается — уменьшается индукция катушки — магнит начинает падать;
— Чудо — магнит не падает и не притягивается — вернее, и падает и притягивается несколько тысяч раз в секунду — то есть возникает динамическое равновесие — магнит просто висит в воздухе.
3.Конструкция
Главным элементом конструкции является электро-магнитная катушка (соленоид), которая и удерживает своим полем постоянный магнит.
На пластиковый каркас D36x48 плотно намотано 78 метров медного эмалированного провода диаметром 0.6 мм, получилось где-то 600 витков. По расчетам, при сопротивлении 4.8Ом и питании 12В, ток будет 2.5А, мощность 30Вт. Это необходимо для подбора внешнего блока питания. (По факту получилось 6.0Ом, вряд ли нарезали больше провода, скорее сэкономили на диаметре.)
Внутрь катушки вставлен стальной сердечник от дверной петли диаметром 20мм. На его торцах с помощью термоклея закреплены датчики, которые обязательно должны быть ориентированы в одинаковом направлении.
Катушка с датчиками закреплена на кронштейне из алюминиевой полосы, который, в свою очередь, крепится к корпусу, внутри которого находится плата управления.
На корпусе расположен светодиод, выключатель и гнездо питания.
Внешний блок питания (GA-1040U) взят с запасом по мощности и обеспечивает ток до 3.2А при 12В.
В качестве левтитрующего объекта используется N35H магнит D15x5 с приклеенной банкой из под кока-колы. Сразу скажу, что полная банка не годится, поэтому тонким сверлом делаем отверстия по торцам, сливаем ценный напиток (можно выпить если не боитесь стружки) и к верхнему колечку клеим магнит.
4.Принципиальная схема
Сигналы с датчиков U1 и U2 подаются на операционный усилитель OP1/4, включенный по дифференциальной схеме. Верхний датчик U1 подключен к инвертирующему входу, нижний U2 – к неинвертирующему, то есть сигналы вычитаются, и на выходе OP1/4 получаем напряжение, пропорциональное только уровню магнитной индукции, создаваемому постоянным магнитом вблизи нижнего датчика U2.
Комбинация элементов C1,R6 и R7 является изюминкой данной схемы и позволяет достичь эффекта полной стабильности, магнит будет висеть как вкопанный. Как это работает? Постоянная составляющая сигнала проходит через делитель R6R7 и ослабляется в 11 раз. Переменная составляющая проходит через фильтр C1R7 без ослабления. Откуда вообще берется переменная составляющая? Постоянная часть зависит от положения магнита вблизи нижнего датчика, переменная часть возникает из-за колебаний магнита вокруг точки равновесия, т.е. от изменения положения во времени, т.е. от скорости. Нам интересно, чтобы магнит был неподвижен, т.е. его скорость была равна 0. Таким образом, в управляющем сигнале мы имеем две составляющих – постоянная отвечает за положение, а переменная – за стабильность этого положения.
Переменная составляющая проходит через фильтр C1R7 без ослабления. Откуда вообще берется переменная составляющая? Постоянная часть зависит от положения магнита вблизи нижнего датчика, переменная часть возникает из-за колебаний магнита вокруг точки равновесия, т.е. от изменения положения во времени, т.е. от скорости. Нам интересно, чтобы магнит был неподвижен, т.е. его скорость была равна 0. Таким образом, в управляющем сигнале мы имеем две составляющих – постоянная отвечает за положение, а переменная – за стабильность этого положения.
Далее, подготовленный сигнал усиливается на OP1/3. С помощью переменного резистора P2 устанавливается необходимый коэффициент усиления на этапе настройки для достижения равновесия в зависимости от конкретных параметров магнита и катушки.
На OP1/1 собран простой компаратор, который отключает ШИМ и, соответственно, катушку, когда рядом нет магнита. Очень удобная вещь, не надо вынимать блок питания из розетки если убрали магнит. Уровень срабатывания задается переменным резистором P1.
Далее, управляющий сигнал подается на широтно-импульсный модулятор U3. Размах выходного напряжения 12В, частота выходных импульсов задается номиналами C2,R10 и P3, а скважность зависит от уровня входного сигнала на входе DTC.
ШИМ управляет переключением силового транзистора T1, а тот, в свою очередь, током через катушку.
Светодиод LED1 можно и не ставить, а вот диод SD1 нужен обязятельно, для слива лишнего тока и избежания перенапряжения в моменты выключения катушки из-за явления самоиндукции.
NL1 – это наша самодельная катушка, коей посвящен отдельный раздел.
В результате, в режиме равновесия, картина будет примерно такая: U1_OUT=2.9V, U2_OUT=3.6V, OP1/4_OUT=0.7V, U3_IN=1.8V, T1_OPEN=25%, NL1_CURR=0.5A.
Для наглядности прикладываю графики передаточной характеристики, АЧХ и ФЧХ, и осциллогаммы на выходе ШИМ и катушки.
5.Выбор компонентов
Устройство собрано из недорогих и доступных компонентов. Самой дорогой оказалась медная проволока WIK06N, за 78 метров WIK06N заплатил 1200 руб, все остальное, вместе взятое, обошлось значительно дешевле. Тут вообще широкое поле для экспериментов, можно обойтись без сердечника, можно взять проволоку потоньше. Главное не забывать, что индукция по оси катушки зависит от количества витков, тока по ним и геометрии катушки.
Самой дорогой оказалась медная проволока WIK06N, за 78 метров WIK06N заплатил 1200 руб, все остальное, вместе взятое, обошлось значительно дешевле. Тут вообще широкое поле для экспериментов, можно обойтись без сердечника, можно взять проволоку потоньше. Главное не забывать, что индукция по оси катушки зависит от количества витков, тока по ним и геометрии катушки.
В качестве датчиков магнитного поля U1 и U2 используются аналоговые датчики Холла SS496A с линейной характеристикой вплоть до 840Гс, это самое то для нашего случая. При использовании аналогов с другой чувствительностью потребуется корректировка коэффициента усиления на OP1/3, а также проверка на уровень максимальной индукции на торцах вашей катушки (в нашем случае с сердечником она достигает 500Гс), чтобы датчики не входили в насыщение при пиковой нагрузке.
OP1 -это счетверенный операционный усилитель LM324N. При выключенной катушке выдает 20мВ вместо нуля на 14 выходе, но это вполне приемлемо. Главное не забыть выбрать из кучки 100К резисторов наиболее близкие по фактическому номиналу для установки в качестве R1,R2,R3,R4.
Номиналы C1,R6 и R7 выбраны путем проб и ошибок как самый оптимальный вариант для стабилизации магнитов разных калибров (тестировались N35H магниты D27x8, D15x5 и D12x3). Соотношение R6/R7 можно оставить как есть, а номинал C1 увеличивать до 2-5мкФ, в случае возникновения проблем.
При использовании очень маленьких магнитов, вам возможно будет не хватать коэффициента усиления, в этом случае урежьте номинал R8 до 500Ом.
D1 и D2 это обычные выпрямительные диоды 1N4001, тут подойдут любые.
В качестве широтно-импульсного модулятора U3 используется распространенная микросхема TL494CN. Частота работы задается элементами C2, R10 и P3 (по схеме 20кГц). Оптимальный диапазон 20-30кГц, при меньшей частоте появляется свист катушки. Вместо R10 и P3 можно просто поставить резистор 5.6K.
T1 это полевой транзистор IRFZ44N, подойдет и любой другой из этой же серии. При выборе других транзисторов может потребоваться установка радиатора, ориентируйтесь на минимальные значения сопротивления канала и заряда затвора.
При выборе других транзисторов может потребоваться установка радиатора, ориентируйтесь на минимальные значения сопротивления канала и заряда затвора.
SD1 это диод шоттки VS-25CTQ045, тут я хватанул с большим запасом, подойдет и обычный быстродействующий диод, но, возможно, будет сильно греться.
LED1 желтый светодиод L-63YT, здесь, как говорится, на вкус и цвет, можно их и побольше наставить, чтобы все светилось разноцветными огнями.
U4 это стабилизатор напряжения 5В L78L05ACZ для питания датчиков и операционного усилителя. При использовании внешнего блока питания с дополнительным выходом 5В, можно обойись и без него, но конденсаторы лучше оставить.
6.Заключение
Все получилось как задумано. Устройство стабильно работает круглые сутки, потребляет всего 6Вт. Ни диод, ни катушка, ни транзистор не греются. Прикладываю еще пару фоток и финальное видео:
Когда-то из каких-то хороших, но разрушенных компьютерных колонок ко мне попала микросхема TDA1552Q. Ознакомившись с даташитом (http://www.nxp.com/documents/data_sheet/TDA1552Q_CNV.pdf), я отложил ее «до лучших времен». Но недавно в Интернете мне случайно попалось слово «Левитрон» и множество изображений рекламного характера. Мозг быстро отбросил простые «волчки» и подвесные конструкции, остались «платформы» и вопрос: а получится ли у меня сделать нечто похожее, да еще и из хлама? Скажу сразу – получилось. Предлагаемая статья не только о том, как сделан левитрон (в Интернете хватает примеров), но и о том, как его настроить (чего я не нашел вовсе).
Сразу хочется поблагодарить участников форума РадиоКот, наполнивших сообщениями длинную ветку о левитроне, а также неизвестного автора схемы и чертежа. Особая благодарность – Barry Hansen за статью, которая для моего мозга стала мощным катализатором в работе над левитроном, хотя она посвящена подвесной, а не платформенной конструкции. Статья написана простым английским языком, с легким юмором и объяснениями, доступными даже школьнику.
Статья написана простым английским языком, с легким юмором и объяснениями, доступными даже школьнику.
Ссылки в благодарностях приведены не случайно, а рекомендованы для ознакомления всем желающим попробовать свои силы в конструировании левитронов.
Коротенькое видео:
Немного теории
Начнем, пожалуй, с механической схемы платформенного левитрона, сложившейся в моем понимании. Магнит, который парит над платформой, я буду здесь для краткости называть словом «фишка».
Эскиз платформы левитрона (сверху) изображен на рис. 1.
Рис. 1
На рис. 2 – силовая схема вертикального разреза по центральной оси платформы (как я ее себе представляю) в состоянии покоя и без тока в катушках. Все хорошо, кроме того, что состояние покоя в такой системе нестабильно. Фишка стремится сместиться с вертикальной оси системы и с силой шлепнуться на один из магнитов. При «ощупывании» фишкой пространства над магнитами ощущается силовой «горб» над центром платформы с вершиной, лежащей на центральной оси.
Рис. 2
mg – вес фишки,
F1 и F2 – силы взаимодействия фишки с магнитами платформы,
Fmag – суммарное воздействие, уравновешивающее вес фишки,
ДХ – датчики Холла.
На рис. 3. изображено взаимодействие фишки с катушками (опять же, по моему понятию), а остальные силы – опущены.
Рис. 3.
Из рисунка 3 видно, что цель управления катушками – создать горизонтальную силу Fss, направленную всегда к оси равновесия при возникновении смещения Х. Для этого достаточно включить катушки так, чтобы одинаковый ток в них создавал магнитное поле противоположного направления. Остался пустяк: измерить смещение фишки от оси (величину Х) и определить направление этого смещения с помошью датчиков Холла, а потом пропустить в катушках подходящей силы токи.
Простой повтор электронных схем – не в наших традициях, тем более, что:
— нет в наличии двух TDA2030A, а есть TDA1552Q;
— нет датчиков Холла SS496 (доступны примерно по $2 за штуку), а есть датчики, похожие на HW101, по 3 шт даром в каждом двигателе диска CD- или DVD-драйва;
— лень возиться с двуполярным питанием.
Даташиты:
SS496 — http://sccatalog.honeywell.com/pdbdownload/images/ss496.series.chart.1.pdf
HW101- http://www.alldatasheet.com/datasheet-pdf/pdf/143838/ETC1/HW101A.html
Схема представляет собой два идентичных усилительных канала с дифференциальными входами и мостовыми выходами. На рис. 4 приведена полностью схема только одного канала усиления. Использованы микросхемы LM358 (http://www.ti.com/lit/ds/symlink/lm158-n.pdf) и TDA1552Q (http://www.nxp.com/documents/data_sheet/TDA1552Q_CNV.pdf).
Рис. 4.
На вход каждого канала подключена пара датчиков Холла так, чтобы подать на усилитель разностный сигнал. Выходы датчиков включены встречно. Это значит, что, когда пара датчиков находится в магнитном поле с одинаковой напряженностью, с нее на вход усилителя поступает нулевое разностное напряжение.
Балансировочные резисторы R10 взяты многооборотные, старые, советские.
В попытках выжать из усилителя достаточно высокий коэффициент усиления, я получил банальное самовозбуждение, предположительно, из-за бардака на монтажной плате. Вместо «уборки» в схему введены частотнозависимые RС-цепочки R15C2; они не обязательны. Если все же пришлось их установить, то сопротивление R15 нужно подобрать наибольшим, при котором самовозбуждение гаснет.
Питание всего устройства — адаптер (импульсный) на 12В 1,2А, перенастроенный на 15В. Энергопотребление в нормальном состоянии (с выключенным вентилятором) в итоге оказалось вполне скромным: 210-220 мА.
Конструкция
В качестве корпуса выбран кожух дисковода 3,5”, что приблизительно соответствует габаритам прототипов. Для горизонтирования платформы
ножки сделаны из винтов М3.
В верхней части корпуса вырезано фигурное отверстие, хорошо видимое на рис.5. Впоследствии оно закрыто декоративной зеркальной пластиной из хромированной латуни, закрепленной винтиками от винчестеров.
Рис. 5.
1 – места установки магнитов (снизу) и индикаторов баланса (опционально)
2 – «полюсные наконечники» катушек
3 – датчики Холла
4 – светодиоды подсветки (опционально)
Датчики Холла расположены в отверстиях стеклотекстолитового основания платформы и распаяны на разогнутых ножках разъемов (не знаю типа). Разъемы выглядели как на рис.6.
Рис. 6.
Датчики выпаяны из двигателей CD- или DVD-привода. Там они расположены под краем ротора и хорошо видны на рис.7. На один канал нужно брать пару датчиков из одного двигателя – так они будут наиболее одинаковыми. Выпаянные датчики – на рис.8.
Рис. 7. Рис. 8.
Для катушек были куплены пластмассовые шпули для швейных машинок, но на них оказалось мало места для обмотки. Тогда от шпуль были отрезаны щечки и приклеены на отрезки тонкостенной латунной трубки наружным диаметром 6мм и длиной 14мм. Трубка раньше была сегментом телескопической стержневой антенны. На четырех таких каркасах проводом 0,3 мм намотаны обмотки «почти послойно» (без фанатизма!) до заполнения. Сопротивление выровнено на 13 Ом.
Магниты – прямоугольные 20х10х5 мм и дисковые диаметром 25 и 30 мм толщиной 4 мм (рис.9) – пришлось все-таки купить… Прямоугольные магниты установлены под основанием платформы, а из дисковых сделаны фишки.
Рис. 9.
Вид устройства снизу и сзади (вверх дном) – на рис. 10 и 11 (легенда одна на оба рисунка). Бардак, конечно, живописный…
Микросхема U2 TDA1552Q (3) размещена на теплоотводе (9), который раньше работал на видеокарте. Сам радиатор закреплен винтами на отогнутых частях верхней крышки корпуса. На радиаторе (9) закреплены также гнездо питания (1), контрольные гнезда (2) и узел терморегулирования (5).
Кусок стеклотекстолита, который раньше был клавиатурой, служит основанием платформы. Катушки (7) закреплены на основании винтами М4 и гайками. На нем же с помощью хомутов и саморезов укреплены магниты (6).
Контрольные гнезда (2) сделаны из компьютерного разъема питания и закреплены сзади устройства вблизи балансировочных резисторов (10) так, что легко доступны без разборки. Подключены гнезда, естественно, к выходам обоих каналов усилителя.
Схема предусилителя и его стабилизатора питания, включая балансировочные резисторы (10), смонтирована на макетной плате и в результате наладки превратилась в живописный свинарничек, от макрофотографирования которого пришлось воздержаться.
Рис.10. Рис.11.
1 – крепление гнезда питания
2 – контрольные гнезда
3 – TDA1552Q
4 – выключатель питания
5 – узел терморегулирования
6 – магниты под хомутиками
7 – катушки
8 – магнитные шунты
9 – теплоотвод
10 – балансировочные резисторы
Выставление нулей на выходах обоих каналов при каждом отладочном включении – обязательно. Можно без фанатизма: +–20 мВ – вполне приемлемая точность. Возможно некоторое взаимовлияние между каналами, так что при значительном начальном отклонении (больше 1-1.5 вольт по выходу канала) выставление нулей лучше сделать дважды. Стоит помнить, что при железном корпусе баланс разобранного и собранного устройства – это две большие разницы.
Проверка фазировки каналовФишку нужно взять в руку и поместить над центром платформы включенного левитрона на высоте примерно 10-12мм. Каналы проверяются поочередно и раздельно. При смещении фишки рукой вдоль линии, соединяющей противоположные от центра датчики, рука должна чувствовать заметное сопротивление, создаваемое магнитным полем катушек. Если сопротивления не чувствуется, а руку с фишкой «сносит» от оси, нужно поменять местами провода с выхода проверяемого канала.
Настройка положения парящей фишкиНа видеороликах о самодельных платформенных левитронах нередко можно видеть, что фишка парит в наклонном положении, даже если сделана на базе дисковых магнитов, то есть, достаточно хорошо симметрирована. Не обошлось без перекоса и в описываемой конструкции. Возможно, в этом виноват металлический корпус…
Первая мысль: сместить вниз магниты с той стороны, где фишку излишне «подпирает».
Вторая мысль: сместить дальше от центра магниты с той стороны, где фишку излишне «подпирает».
Третья мысль: если магниты смещать, то магнитной ось системы постоянных магнитов платформы перекосится относительно магнитной оси системы катушек, из-за чего поведение фишки станет непредсказуемым (особенно при разном ее весе).
Четвертая мысль: сделать сильнее магниты с той стороны, куда наклонена фишка – была отброшена как несбыточная, потому что широкого ассортимента магнитов для подгонки негде было взять.
Пятая мысль: сделать слабее магниты с той стороны, где фишку излишне «подпирает» – оказалась удачной. Более того, достаточно простой в реализации. Магнит, как источник магнитного поля, можно шунтировать, то есть, закоротить часть магнитного потока, так что в окружающем пространстве магнитное поле станет немного слабее. В качестве магнитных шунтов были применены маленькие ферритовые кольца (10х6х3, 8х4х2 и т.д.), бесплатно выковырянные из дохлых ламп-экономок (8 на рис.10). Эти кольца нужно просто примагнитить к слишком сильному магниту (или двум-трем) с той их стороны, что дальше от центра платформы. Оказалось, что подбирая количество и размеры шунтов для каждого «слишком сильного» магнита, можно достаточно точно отгоризонтировать положение парящей симметричной фишки. Не забывайте выполнить электрическую балансировку после каждого изменения в магнитной системе!
К опциям относятся: индикаторы разбаланса усилителя, узел терморегулирования, подсветка и регулируемые ножки платформы.
Индикаторы разбаланса усилителя – две пары светодиодов, расположенные на тех же радиусах, что и датчики, в толще стеклотекстолитового основания платформы (1 на рис. 5). Светодиоды, очень маленькие и плоские, раньше работали в каком-то модеме, но подойдут и от старой мобилки (в SMD исполнении). Светодиоды утоплены в отверстиях, так как фишка, срываясь из центра, шлепается на ближайший магнит и вполне способна разрушить светодиод.
Схема индикатора для одного канала – на рис. 12. Светодиоды должны быть с рабочим напряжением 1,1-1,2 В, т.е. простенькие красные, оранжевые, желтые. При более высоких напряжениях LED-ов (2,9-3,3 В для сверхъярких) следует пересчитать количество диодов в цепочке D3-D6 для сведения к минимуму «мертвой зоны» – минимального напряжения на выходе канала, при котором ни один из светодиодов не светится.
Рис. 12.
Я расположил индикаторы так, чтобы светился тот, в сторону которого фишка смещена от центра. Индикаторы помогают легко повесить фишку над левитроном, а также горизонтировать платформу. В нормальном состоянии все они погашены.
Схема узла терморегулирования – на рис. 13. Его назначение – не дать оконечному усилителю перегреться. На выходе термоузла включен вентилятор 50х50 мм 12В 0,13А от компьютера.
Рис. 13.
В схеме термоузла легко узнать немного измененный триггер Шмитта. Вместо первого транзистора использована микросхема TL431. Тип транзистора Q1 указан условно – я воткнул первый попавшийся NPN, способный выдержать рабочий ток вентилятора. В качестве термодатчика использован терморезистор, найденный на старой материнской плате в процессорном сокете. Термодатчик приклеен на радиатор оконечного усилителя. Подбором резистора R1 можно отрегулировать термоузел на срабатывание при температуре 50-60С. Резистор R5 совместно с коллекторным током Q1 определяет величину гистерезиса схемы относительно напряжения на управляющем входе U1.
В схеме на рис. 13 резистор R7 введен для снижения напряжения на вентиляторе и, соответственно, шума от него.
На рис. 14 видно, как вентилятор врезан в нижнюю крышку корпуса.
Рис. 14.
Другой способ применения термоузла – подключение к управляющему выводу MUTE микросхемы оконечного усилителя (рис. 15). Величина указанного на схеме номинала R5 предполагает подключение MUTE (вывода 11 микросхемы U2 по рис. 4) к питанию через резистор 1кОм (НЕ напрямую, как в даташите!). Вентилятор в таком случае не нужен. Правда, при подаче сигнала MUTE на усилитель фишка падает, и после снятия сигнала MUTE сама (почему-то?) не взлетает.
Рис. 15.
Подсветка – 4 ярких светодиода диаметром 3мм, расположенные наклонно к центру в отверстиях основания платформы и декоративной пластины в тех местах, куда фишка не падает. Они включены последовательно и через резистор 150 Ом – к цепи общего питания устройства 15В.
ЗаключениеГрузоподъемностьЧтоб «добить» тему, сняты «грузовые характеристики» левитрона с фишками 25 и 30 мм диаметром. Грузовыми характеристиками я тут назвал зависимость высоты парения фишки над платформой (от декоративной пластины) от суммарного веса фишки.
Для фишки с магнитом 25 мм и общим весом 19г максимальная высота составила 16мм, а минимальная – 8 мм при весе 38г. Между этими точками характеристика практически линейная. Для фишки с магнитом 30 мм грузовая характеристика оказалась между точками 16 мм при 24г и 8 мм при 48г.
С высоты ниже 8 мм от платформы фишка падает, притягиваясь к железным сердечникам катушек.
Во-первых, не стоит экономить на датчиках. «Голые» датчики Холла, вынутые попарно для каждого канала из двух двигателей (то есть, практически одинаковые!) – все равно проявляют свой безобразно большой температурный коэффициент сопротивления. Даже при одинаковых цепях питания и встречно-разностном включении выходов датчиков, можно получить заметное смещение нуля на выходе канала при изменении температуры. Интегральные датчики SS496 (SS495) имеют не только встроенный усилитель, но и термостабилизацию. Внутренний усилитель датчиков позволит сделать существенно выше общий коэффициент усиления каналов, да и схема их питания выходит попроще.
Во-вторых, следует, по возможности, воздержаться от размещения левитрона в железном корпусе.
В-третьих, двуполярное питание все-таки предпочтительнее, потому что управление коэффициентом усиления и юстировкой нулей получаются проще.
Как они это делают? Более пристальный взгляд на квантовую магнитную левитацию
В течение трех лет, когда я был студентом-физиком, выступая на научных магических шоу и днях открытых дверей, я убеждал студентов (а иногда и их родителей), что я был своего рода волшебником, поднимая небольшой магнит в форме куба. . Магнит парил над сверхпроводником всего на сантиметр или около того, но этого было достаточно, чтобы помахать листком бумаги между ними, чтобы доказать, что никаких ниток буквально не было.Прикосновение к одному краю куба заставляло его вращаться на месте, и даже если вы толкали магнит вниз, он снова решительно отскакивал вверх – если этого не происходило, это означало, что сверхпроводник должен быть холоднее.
Простым рецептом этого научно обоснованного заклинания было бы брызги жидкого азота для охлаждения керамического сверхпроводника, находящегося в резервуаре из пенополистирола, и магнит, создающий сильное постоянное магнитное поле из редкоземельных элементов.
Левитация работает благодаря сверхпроводимости, которую можно понять с помощью основных принципов проводимости.Определенные элементы и материалы, метко названные проводниками, служат в качестве электрического канала, что означает, что электроны могут проходить через них с относительной легкостью. Эти электроны все еще сталкиваются с атомами, составляющими проводник, и теряют немного энергии при каждом столкновении. Но при охлаждении до достаточно холодной температуры электроны могут свободно течь через проводник без каких-либо столкновений. Это потому, что электроны образуют пары при чрезвычайно низких температурах (тогда как тепло может разорвать предварительную связь между ними).Хотя их связи слабые, их сила выражается в цифрах: спаривание делает так, что столкновения, которые обычно высасывают энергию из электронного потока, не имеют никакого эффекта, потому что столкновения слабее, чем связь электронов.
Критическая температура сверхпроводника – насколько холодным он должен быть, чтобы эти пары стали возможными – зависит от его материала. Металлические сверхпроводники, такие как чистый алюминий или ниобий, например, имеют чрезвычайно низкие критические температуры, обычно всего на несколько градусов выше абсолютного нуля.Однако использовать один из них для домашнего эксперимента невозможно, если только у вас нет большого количества жидкого гелия. (Жидкий гелий кипит при 4,2 кельвина или около –270 градусов по Цельсию, всего на несколько градусов ниже абсолютного нуля). К счастью, есть альтернатива: высокотемпературные сверхпроводники, представляющие собой керамику, состоящую из нескольких элементов, которые позволяют электронам свободно течь при температурах, немного превышающих большинство критических.
77 К (около –196 градусов Цельсия) не похоже на день в тропиках, но в мире сверхпроводников это просто жарко.Это также температура, при которой жидкий азот – гораздо более доступный, чем жидкий гелий – кипит. Для большинства высокотемпературных керамических сверхпроводников, например из оксида иттрия, бария, меди (YBCO) или оксида висмута, стронция, кальция, меди (BSCCO), можно использовать жидкий азот для охлаждения их ниже их критических температур.
Теперь у нас есть две части головоломки: высокотемпературный сверхпроводник и достаточно жидкого азота, чтобы он оставался прохладным. Но как мы можем удерживать магнит над охлаждаемым сверхпроводником? (Или наоборот: в нашем видео с Ричардом Гэрриотом он поместил охлажденный сверхпроводник над слоем редкоземельных магнитов.)
Квантовая магнитная левитация сводится к так называемому эффекту Мейснера, который возникает только тогда, когда материал достаточно холодный, чтобы вести себя как сверхпроводник. При нормальных температурах магнитные поля могут нормально проходить через материал. Однако, когда становится достаточно холодным, чтобы проявлять сверхпроводимость, эти магнитные поля исчезают. Любые магнитные поля, которые проходили через него, должны вместо этого перемещаться вокруг него. Когда магнит помещается над сверхпроводником при критической температуре, сверхпроводник отталкивает свое поле, действуя как магнит с тем же полюсом, заставляя магнит отталкиваться, то есть «плавать» – никакой магической ловкости рук не требуется.
Как построить магнитный левитирующий волчок: 12 ступеней (с изображениями)
Теперь настало время для нескольких шагов с большим количеством текста и без изображений. Просто очень сложно объяснить динамические проблемы с помощью статического текста, поэтому посмотрите видео на шаге №1, чтобы увидеть, как это работает.
Положите плоский лист из немагнитного материала на пластиковый контейнер и попробуйте покрутить его. Хороший шанс, что он не только левитирует, но и вращается. С ним может быть что-то не так:
* Большой магнит перевернут.Снимите крышку и медленно опустите на нее верх. Если при опускании верха вы ничего не чувствуете, значит, вы чувствуете, что верх сидит на магнитной подушке, значит, это неправильная сторона. Переверните большой магнит. Теперь, когда вы опускаете верх, он ощущает некоторое сопротивление, и большой магнит начинает втягивать его внутрь отверстия. Это правильная ориентация. Закройте крышку.
* Верх находится слишком высоко над большим магнитом, поэтому большой магнит отталкивает его, и когда вы его вращаете, он мгновенно улетает.Уменьшите расстояние от верха до большого магнита, подняв большой магнит. Поднять большой магнит помогут шайбы и стаканчики для бутылок.
* Вершина расположена слишком низко над большим магнитом, поэтому большой магнит слишком сильно притягивает верх, и гироскопической силы недостаточно, чтобы удерживать его прямо. В этом случае он падает и кувыркается сразу после того, как вы его отпустите. Вам нужно увеличить расстояние между верхом и магнитом. Вы можете сделать это, например, подняв пластиковый контейнер на шайбу стаканчиков для бутылок.
Идеальное положение для верха – немного ниже этой точки, когда большой магнит перестает отталкивать верх и начинает притягивать. Отрегулируйте высоту магнита под пластиковым контейнером так, чтобы верх находился именно в этом положении, когда вы пытаетесь его вращать. Вы также можете переместить небольшой магнит только на верхнюю штангу для точной настройки.
Обратите внимание, что в этом положении вам может потребоваться слегка надавить на верх во время вращения. Если вам это неудобно, смело уменьшите расстояние между магнитами еще немного.
На самом деле, при вращении может пойти не так, как надо: скорость.
* Если вы вращаете волчок слишком медленно, он начнет слишком сильно прецессировать и слишком быстро падать.
* Если вы вращаете волчок слишком быстро, он начнет прецессию еще быстрее и тоже упадет.
* Поворачивайте волчок не слишком быстро и не слишком медленно. Фактически, начните с медленной стороны и продолжайте увеличивать скорость, пока не достигнете максимальной скорости, после чего вершина сойдет с ума.
Помимо начального вращения, стабилизированная вращением магнитная левитация работает только на скоростях от 1000 до 3000 об / мин (оборотов в минуту).Так что вращение волчка быстрее 3000 об / мин не поможет продлить его полет.
После того, как вы правильно разместите верхнюю часть листа, она должна стабильно вращаться на листе. Фактически, если вам повезет и вы будете терпеливы, вы можете поместить его в точку, в которой он самостабилизируется. Даже если вы не слишком хорошо его раскрутите, он со временем распрямится.
Да, и еще одна важная вещь – это то, с чего вы начинаете вращаться – это должно происходить точно над центром большого магнита, иначе маленький магнит будет качаться и вообще не вращаться.
Сбор электромагнитной энергии на основе магнитной левитации: полуаналитическая нелинейная модель для преобразования энергии
Деван, А., Ай, СУ, Карим, Миннесота и Бейенал, Х. Альтернативные источники питания для удаленных датчиков: А. обзор. J. Источники энергии 245 (1), 129–143 (2014).
CAS ОБЪЯВЛЕНИЯ Статья Google Scholar
Халиг, А., Цзэн, П. и Чжэн, К. Сбор кинетической энергии с использованием пьезоэлектрических и электромагнитных технологий – современное состояние.IEEE T. Ind. Electron. 57 (3), 850–860 (2010).
Артикул Google Scholar
Харб, А. Сбор энергии: современное состояние. Обновить. Energ. 36 (10), 2641–2654 (2011).
CAS Статья Google Scholar
Парадизо, Дж. А. и Старнер, Т. Улавливание энергии для мобильной и беспроводной электроники. Pervasive Comput. 4 (1), 18–27 (2005).
Артикул Google Scholar
Митчесон, П.Д., Йитман, Э. М., Рао, Г. К., Холмс, А. С. и Грин, Т. С. Сбор энергии от движения человека и машины для беспроводных электронных устройств. Proc. IEEE 96 (9), 1457–1486 (2008).
Артикул Google Scholar
Биби, С. П., Тюдор, М. Дж. И Уайт, Н. М. Энергосберегающие источники вибрации для микросистемных приложений. Измер. Sci. Technol. 17 (12), R175 – R195 (2006).
CAS Статья Google Scholar
Teng, X.-F., Zhang, Y.-T., Poon, C.C. & Bonato, P. Носимые медицинские системы для p-health. IEEE Rev. Biomed Eng. 1. С. 62–74 (2008).
Артикул Google Scholar
Zhang, C. L. и Chen, W. Q. Широкополосный накопитель магнитной энергии. Прил. Phys. Lett. 96, 123507-1–123507-3 (2010).
ADS Google Scholar
Джанг, С., Ким, И., Юнг, Х. и Ли, Ю. Настраиваемый сборщик энергии вращения для низкочастотной вибрации.Прил. Phys. Lett. 99, 134102-1–134102-3 (2011).
ADS Google Scholar
Уорд, Дж. К. и Беренс, С. Алгоритмы адаптивного обучения для сбора энергии вибрации. Smart Mater. Struct. 17, 035025 (2008).
ADS Статья Google Scholar
Маллик, Д. и Рой, С. Двунаправленная электрическая настройка комбайнов электромагнитной энергии на базе FR4.Датчик. Actuat A-Phys. 226. С. 154–162 (2015).
CAS Статья Google Scholar
Шариати, Н., Роу, У. С., Скотт Дж. Р. и Горбани, К. Многофункциональный высокочувствительный выпрямитель для улучшенного отвода РЧ-энергии. Sci. Реп. 5, 9655 (2015).
CAS ОБЪЯВЛЕНИЯ Статья Google Scholar
Чжу Д., Тюдор М. Дж. И Биби С. П. Стратегии увеличения диапазона рабочих частот вибрационных комбайнов: обзор.Измер. Sci. Technol. 21, 022001 (2010).
ADS Статья Google Scholar
Харн Р. Л. и Ван К. В. Обзор недавних исследований по сбору энергии вибрации с помощью бистабильных систем. Smart Mater. Struct. 22, 023001 (2013).
ADS Статья Google Scholar
Суссманн, Х. Дж. Нелинейная управляемость и оптимальное управление (Marcel Dekker INC, 1990).
Болтянский В.Г. Достаточные условия оптимальности и обоснование метода динамического программирования. SIAM J. Control 4 (2), 326–361 (1966).
MathSciNet Статья Google Scholar
Soares dos Santos, M. P. et al. Инструментальные имплантаты бедра: Системы электроснабжения. J. Biomech. 46 (15), 2561–2571 (2013).
Артикул Google Scholar
Соарес душ Сантуш, М.P. et al. Инструментальные замены тазобедренного сустава, замены бедренной кости и стабилизаторы перелома бедренной кости. Эксперт Rev. Med. Устройства 11 (6), 617–635 (2014).
CAS Статья Google Scholar
Morais, R. et al. Двойной генератор вибрации с постоянными магнитами для интеллектуального протеза бедра. Датчик. Actuat A-Phys. 172: 1 (2011). С. 259–268.
CAS Статья Google Scholar
Манн, Б.П. и Симс, Н. Д. Сбор энергии из нелинейных колебаний магнитной левитации. J. Sound Vib. 319 (1-2), 515–530 (2009).
ADS Статья Google Scholar
Авила Бернал, А. Г. и Линарес Гарсия, Л. Э. Моделирование архитектуры сбора электромагнитной энергии. Прил. Математика. Модель. 36 (10), 4728–4741 (2012).
MathSciNet Статья Google Scholar
Даллаго, Э., Марчези М. и Венчи Г. Аналитическая модель вибрационного электромагнитного комбайна с учетом нелинейных эффектов. IEEE Trans. Power Electron. 25 (8), 1989–1997 (2010)
ADS Статья Google Scholar
Саха, К. Р., О’Доннелл, Т., Ван, Н. и Макклоски, П. Электромагнитный генератор для сбора энергии от движения человека. Датчик. Actuat A-Phys. 147 (1), 248–253 (2008).
CAS Статья Google Scholar
Муназ, А.Ли, Б. и Чанг, Г. Исследование комбайна для сбора электромагнитной энергии с использованием многополюсного магнита. Датчик. Actuat A-Phys. 2013. Т. 201. С. 134–140.
CAS Статья Google Scholar
Фурлани, Э. П. и Сюэ, X. Анализ поля, силы и транспорта для доставки генов на основе магнитных частиц. Микрожидкость. Нанофлюид. 13 (4), 589–602 (2012).
CAS Статья Google Scholar
Сюэ, Х.И Фурлани, Э. П. Наноструктурирование с помощью шаблонов частиц магнитного ядра-оболочки в градиентных полях. Phys. Chem. Chem. Phys. 16 (26), 13306–13317 (2014).
CAS Статья Google Scholar
Лю Л. и Юань Ф. Г. Сборщик энергии нелинейных колебаний с использованием диамагнитной левитации. Прил. Phys. Lett. 98 (20), 203507 (2011).
ADS Статья Google Scholar
Лю Л.И Юань, Ф. Г. Диамагнитная левитация для сбора энергии нелинейных колебаний: теоретическое моделирование и анализ. J. Sound Vib. 332 (2), 455–464 (2013).
ADS Статья Google Scholar
Ван, X. Y., Палагумми, С., Лю, Л. и Юань, Ф. Г. Сборщик энергии вибрации на магнитной подушке. Smart Mater. Struct. 22 (5), 055016 (2013).
ADS Статья Google Scholar
Палагумми, С.& Юань, Ф. Г. Оптимальная конструкция моностабильного комбайна для сбора энергии электромагнитных колебаний на основе вертикальной диамагнитной левитации. J. Sound Vib. 2015. Т. 342. С. 330–345.
ADS Статья Google Scholar
Фурлани Э. П. Постоянные магниты и электромеханические устройства: материалы, анализ и приложения (Academic Press, 2001).
Фурлани, Э. П. Метод прогнозирования поля в двигателях с осевым полем на постоянных магнитах.IEEE Trans. Mag. 28 (5), 2061–2066 (1992).
ADS Статья Google Scholar
Фурлани, Э. П. Расчет поля в двигателях с постоянным магнитом с осевым полем. IEEE Trans. Mag. 30 (5), 3660–3663 (1994).
ADS Статья Google Scholar
Фурлани Э. П. Формула силы левитации между магнитными дисками. IEEE Trans. Mag. 29 (6), 4165–4169 (1993).
ADS Статья Google Scholar
Крейк Д. Дж. Магнетизм: принципы и приложения. 342–244 (Джон Вили, 1995).
Вокоун Д., Беледжиа М., Хеллер Л. и Шиттнер П. Магнитостатические взаимодействия и силы между цилиндрическими постоянными магнитами. J. Magn. Magn. Матер. 321 (22), 3758–3763 (2009).
CAS ОБЪЯВЛЕНИЯ Статья Google Scholar
Карнопп, Д.Компьютерное моделирование скачкообразного трения в механических динамических системах. J. Dyn. Систем.-Т АСМЭ 107 (1), 100–103 (1985).
Артикул Google Scholar
Palagummi, S., Zou, J. & F. Yuan, F. Сборщик энергии низкочастотной вибрации на основе горизонтальной диамагнитной левитации. J. Vib. Акуст. 137 (6), 061004 (2015).
Артикул Google Scholar
Деун, Дж.V. & Cools, R. Интегрирование произведений функций Бесселя с дополнительным экспоненциальным или рациональным множителем, Comput. Phys. Commun. 178. С. 578–590 (2008).
ADS MathSciNet Статья Google Scholar
Орфанидис, С. Дж. Оптимальная обработка сигналов: Введение 2-е изд., Гл. 1-2 (Прентис Холл, 1996).
Этот сайт использует файлы cookie для повышения производительности. Если ваш браузер не принимает файлы cookie, вы не можете просматривать этот сайт.
Настройка вашего браузера для приема файлов cookie
Существует множество причин, по которым cookie не может быть установлен правильно. Ниже приведены наиболее частые причины:
- В вашем браузере отключены файлы cookie. Вам необходимо сбросить настройки своего браузера, чтобы он принимал файлы cookie, или чтобы спросить вас, хотите ли вы принимать файлы cookie.
- Ваш браузер спрашивает вас, хотите ли вы принимать файлы cookie, и вы отказались. Чтобы принять файлы cookie с этого сайта, используйте кнопку “Назад” и примите файлы cookie.
- Ваш браузер не поддерживает файлы cookie. Если вы подозреваете это, попробуйте другой браузер.
- Дата на вашем компьютере в прошлом. Если часы вашего компьютера показывают дату до 1 января 1970 г., браузер автоматически забудет файл cookie. Чтобы исправить это, установите правильное время и дату на своем компьютере.
- Вы установили приложение, которое отслеживает или блокирует установку файлов cookie. Вы должны отключить приложение при входе в систему или проконсультироваться с системным администратором.
Почему этому сайту требуются файлы cookie?
Этот сайт использует файлы cookie для повышения производительности, запоминая, что вы вошли в систему, когда переходите со страницы на страницу. Чтобы предоставить доступ без файлов cookie потребует, чтобы сайт создавал новый сеанс для каждой посещаемой страницы, что замедляет работу системы до неприемлемого уровня.
Что сохраняется в файле cookie?
Этот сайт не хранит ничего, кроме автоматически сгенерированного идентификатора сеанса в cookie; никакая другая информация не фиксируется.
Как правило, в файлах cookie может храниться только информация, которую вы предоставляете, или выбор, который вы делаете при посещении веб-сайта. Например, сайт не может определить ваше имя электронной почты, пока вы не введете его. Разрешение веб-сайту создавать файлы cookie не дает этому или любому другому сайту доступа к остальной части вашего компьютера, и только сайт, который создал файл cookie, может его прочитать.
Лучшие парящие сажалки, которые можно купить в Интернете
Amazon Prime
Ваши глаза не обманывают вас: это настоящие парящие плантаторы! И, как и в классическом фокусе, пока они парят в воздухе, вы можете быстро провести пальцем между сеялкой и платформой – или даже слегка покрутить их.
Секрет в старинной технологии магнитов. Если вы помните из начальной школы, когда оба конца северных полюсов двух магнитов обращены друг к другу, возникает сильное магнитное отталкивание. Платформа и горшок, по сути, являются северными полюсами, поэтому сеялка остается на плаву. Аккуратно, правда?
Три ключевых момента, о которых следует помнить: (1) Когда вы устанавливаете сеялку на место, используйте обеими руками для ее правильного центрирования, иначе конец южного полюса может притянуться к платформе и перевернуть сеялку вверх дном, беспорядок; (2) не забудьте снять сеялку перед тем, как выключить платформу, иначе она может рухнуть – опять же, создав беспорядок; и (3) каждое устройство имеет свой собственный предел веса, поэтому убедитесь, что общий вес почвы + растения не превышает этого значения, иначе оно будет слишком тяжелым для левитации.Обратите внимание, что все они поставляются только с сеялкой и магнитной платформой, поэтому заполните ее воздушным растением, суккулентом или растением бонсай по вашему выбору.
Когда он поднимается на плаву, это волшебное зрелище. Никакого волшебства!
Реклама – продолжить чтение ниже
1 Парящий горшок для бонсай в воздухе
Обладая гладким, округлым минималистским дизайном, это самая популярная и популярная левитирующая сеялка на Amazon.
2 Lyfe Floating Levitating Plant Горшок для воздушных растений
Flyte amazon.com 299,00 долл. США15640,91 руб. (23%)
Сделанная из силикона, эта изящная геодезическая сеялка легкая, и за нее легко взять в руки. Основание из дуба.
3 Парящий горшок для бонсай в японском стиле
Мыслитель9999 амазонка.ком
В этом деревенском кашпо любое растение выглядит так, будто весь корневой ком парит в воздухе.
4 Парящий горшок с растением в японском стиле
Активный парень amazon.com
Белая керамическая вазонка медленно вращается, что делает ее идеальной для установки возле окна, где солнечный свет идет только с одной стороны.
5 Деревянный горшок для бонсай с левитацией
Плавающие шары амазонка.ком
Увидеть отражение на зеркальном основании – отличное напоминание о том, что оно на самом деле парит в космосе.
6 Левитирующий магнитный плавающий воздушный горшок для бонсай
Микроландшафтное озеленение amazon.com
Это элегантное кашпо сделано из бамбука и украшено декоративными светящимися в темноте Princess Mononoke эльфами (если вы хотите быть более игривыми, чем элегантными).
7 Светодиодный плавающий горшок для бонсай
amazon.com
Залитая радугой платформа похожа на мини-дискотеку, на которой можно танцевать парящее растение. Он идет в комплекте с искусственным цветком, но вы можете легко заменить его на любое воздушное растение по вашему выбору.
8 Магнитная Левитация Горшечное Растение
Гельянский садовый завод амазонка.ком161,48 $
Есть 24 дизайна, из которых вы можете выбрать. Получите по одному на каждую комнату!
9 Креативный магнитный левитирующий воздушный горшок для бонсай
Озптуу amazon.com
Это одна из самых больших кашпо, которые вы можете получить. Только убедитесь, что вы загружаете почву равномерно и не превышаете лимит веса.
10 Плавающая вращающаяся зеркальная платформа с 8 светодиодами Levitron
Woodlev амазонка.ком
Левитрон на самом деле представляет собой многоцелевую левитирующую платформу – на ней можно плавать что угодно, но если у вас есть суккулент или воздушное растение в собственном контейнере, вы можете легко установить его, чтобы он парил в воздухе.
Энн Лиен Копировать редактор Энн Лиен специализируется на написании статей о дизайне интерьера в House Beautiful и копировании рецептов на Delish.com.Этот контент создается и поддерживается третьей стороной и импортируется на эту страницу, чтобы помочь пользователям указать свои адреса электронной почты.Вы можете найти больше информации об этом и подобном контенте на сайте piano.io.
Реклама – продолжить чтение ниже
Механиканьютонов – Если я использую магнит, чтобы левитировать другой магнит, откуда берется энергия?
Энергия магнита происходит от магнитного дипольного момента.
Настоящая причина магнитного дипольного момента – это магнитный дипольный момент электронов в магните, который кратен спину, потому что спин имеет глубокие причины, связанные со структурой углового момента.
Гравитация не притягивает магнит вниз. Энергия напряжения искривляет пространство-время, и магнит движется по геодезической к центру масс.
Итак, верхний магнит находится в свободном падении по геодезической к центру масс, а другой нижний магнит на земле отталкивает его, а верхний магнит левитирует.
Два магнита обмениваются виртуальными фотонами, и это возбуждения магнитного поля. Электромагнитная сила – это то, что заставляет левитировать верхний магнит.
Итак, верхний магнит следует геодезической в свободном падении через искривленное пространство-время, а магнитные поля нижнего и верхнего магнита отталкиваются друг от друга.
Итак, две силы – это силы двух магнитных полей, которые отталкиваются.
Сеть этих двух сил в свободном пространстве была бы такой же левитацией.
В этом случае оба магнита находятся в свободном падении по геодезической к центру масс.
Нижний магнит левитирует поверхностью Земли (из-за атомной и молекулярной структуры и отталкивающей электромагнитной силы электромагнитных полей между атомами поверхности и нижним магнитом).
Верхний магнит левитирует за счет силы отталкивания между двумя магнитными полями.
Электромагнитное отталкивание между нижним магнитом и поверхностью Земли таково, что расстояние между ними становится едва заметным.
Электромагнитное отталкивание между верхним и нижним магнитами таково, что видно расстояние между ними.
Итак, откуда берется энергия, которая левитирует нижний магнит на поверхности Земли? Это принцип исключения Паули, принцип неопределенности Гейзенберга и электромагнитное отталкивание между атомами в нижнем магните и поверхностью Земли.
Это происходит из-за энергии электрона, откуда это? Электроны вокруг ядер находятся в вакууме и находятся на определенных энергетических уровнях вокруг ядер согласно QM. Они находятся на определенных энергетических уровнях, потому что эти уровни стабильны, а электрон движется в вакууме и не нуждается для этого в дополнительной энергии. В вакууме электрон сохраняет импульс. Не требует лишней энергии. Точно так же, как любой объект в вакууме сохранит свой импульс.
Энергия сил полей верхнего и нижнего магнита также исходит из энергии электрона.Электроны в магнитах продолжают обмениваться виртуальными фотонами. Электронам для этого не требуется дополнительная энергия, потому что суммарная энергия обоих магнитов одинакова.
Как сделать самодельную магнитную левитацию
Магниты могут толкать и тянуть друг друга, не касаясь друг друга из-за магнитной силы между ними. Магниты – это материалы, излучающие магнитное поле, притягивающее определенные металлы. Магниты находят множество применений в современном мире, от промышленности до стереосистем.Обучение магнетизму часто включает демонстрацию более интересных эффектов магнетизма. Одна из самых популярных демонстраций магнетизма – магнитная левитация.
С помощью очень простой настройки можно сделать так, чтобы один магнит заставлял другой магнит левитировать – парить в воздухе. Его даже можно заставить нести груз. Это потому, что каждый магнит имеет два полюса и одинаковые полюса отталкиваются друг от друга. Магнитная левитация – превосходная демонстрация относительной силы двух фундаментальных сил, магнетизма и гравитации.Хотя вся Земля притягивает плавающий магнит и его нагрузку гравитационно, только один крошечный магнит может преодолеть это нисходящее притяжение с помощью магнетизма и заставить его подняться в воздух.
Левитирующий магнит
Держите по одному магниту в каждой руке. Поднесите их друг к другу. Если они попытаются прижать друг друга поближе, разверните одного из них. Если они попытаются оттолкнуть друг друга, отметьте маркером стороны, обращенные друг к другу. Вы знаете, что эти отмеченные стороны являются одним и тем же магнитным полюсом, потому что одинаковые полюса отталкиваются.
Установите зажимную стойку. Вытяните зажимной рычаг как можно дальше, чтобы освободить место для работы. Отрегулируйте зажим по ширине трубки.
