
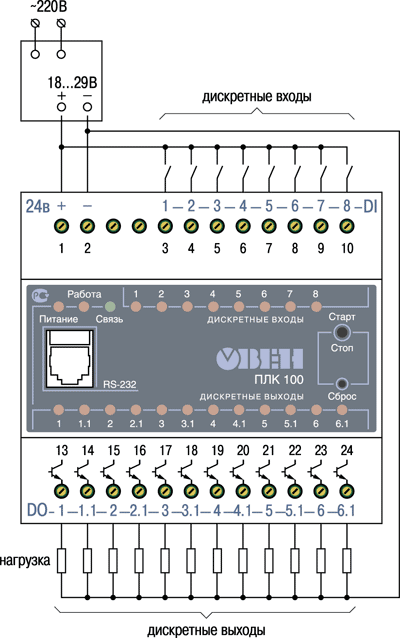
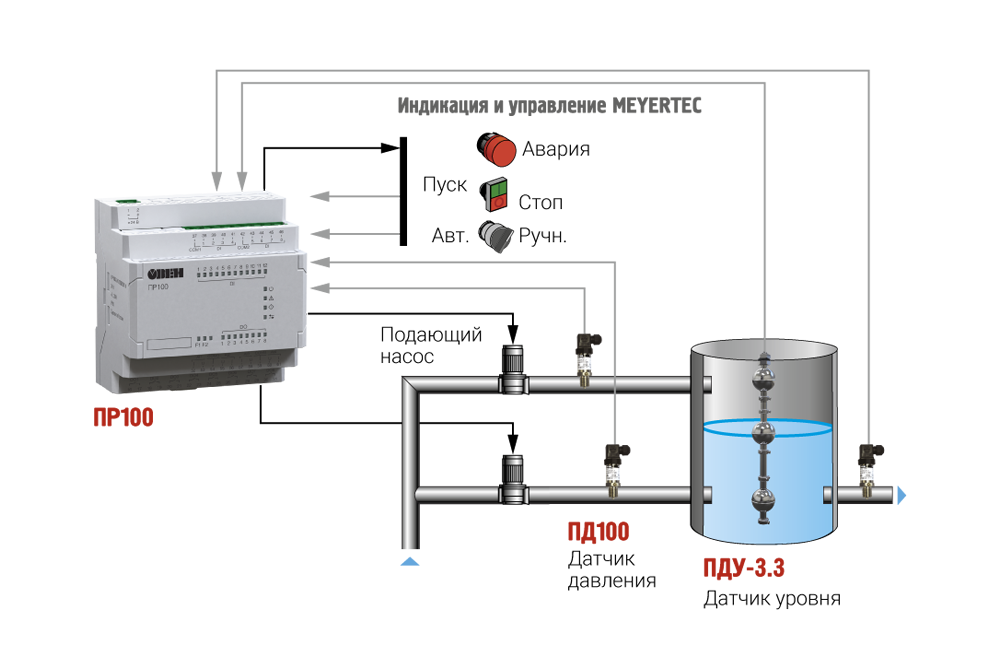
ОВЕН ПР110. Схемы подключения
Схема подключения ПР110-х.8х.4х к ПК (через преобразователь ПР-КП10), G1 – источник питания с номинальным напряжением, зависящим от исполнения прибора
Расположение контактов и элементов индикации в приборах ПР110-ххх.8Дх.4Р-х
Расположение контактов и элементов индикации в приборах ПР110-ххх.12Дх.8Р-х
Подключение нагрузок к выходным контактам реле
Подключение к ПР110-х.
Подключение к ПР110-х.8х.4х дискретных датчиков с выходом типа «сухой контакт»
Схема подключения к ПР110 трехпроводных дискретных датчиков, имеющих выходной транзистор p-n-p: типа с открытым коллектором
Подключение нагрузок к выходным контактам реле
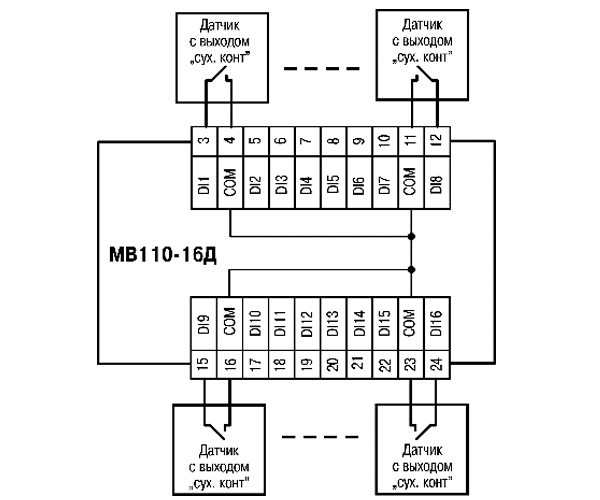
Подключение к ПР110-х.12х.8х дискретных датчиков с выходом типа «сухой контакт»Подключение к ПР110-х. 12х.8х дискретных датчиков с выходом типа «сухой контакт»
12х.8х дискретных датчиков с выходом типа «сухой контакт»
Программируемое логическое реле Овен ПР110/ПР114
Программируемое логическое реле Овен ПР110/ПР114
Линейка программируемых реле ОВЕН ПР предназначена для построения локальных автоматизированных систем управления на основе релейной логики: задач релейной защиты и контроля; управления наружным и внутренним освещением, освещением витрин; управления технологическим оборудованием (насосами, вентиляторами, компрессорами, прессами).
- Различные виды исполнения (по питанию, по типу входов/выходов, по количеству входов/выходов).
- Компактный корпус на ОШ-рейку.
- Широкий климатический диапазон: -20…+55 °С.
- Наличие часов реального времени (взависимости от модификации).
- Возможность интеграции в сети РБ-485, протокол МоЬВиз-БІауе
(при использовании совместно с ПР-МИ485).

- Простая, интуитивно понятная среда программирования с широкими возможностями.
- Возможность создания и отладки проекта без прибора.
Среда программирования OWEN LOGIC
Программа создается пользователем на языке функциональных блоков (ФБ), который полностью соответствует стандарту МЭК 61131-3.
Преимущества
- Количество используемых ФБ – 450 штук (зависит от модификации).
- Возможность создавать свои блоки (макросы).
- Наличие режима симуляции.
- Наличие внутренних переменных для упрощения составления схем.
- Автоматическое обновление встроенного ПО для ОВЕН ПР.
- Имеется возможность распечатать схему или сохранить в документ.
- Выведена полная информация об используемых ресурсах.
- Постоянное развитие ПО.
- Полностью
русско-язычный интерфейс.
Обзор функций и функциональных блоков
- Логические функци («И», «ИЛИ», «НЕ» и т.д.).
- Арифметические функции и функции сравнения.
- Счетчики, триггеры.
- Блоки временныхзадержек.
- Формирователи сигналов.
- Блоки работы с битами.
- Блоки работы с часами реального времени.
Программируемые реле
Свободно программируемое реле ОВЕН ПР не имеет записанной программы в своей памяти. Алгоритм работы реле задается пользователем в зависимости от условий, что обеспечивает устройству универсальность и применимость во многих сферах промышленности, сельском хозяйстве, ЖКХ, на транспорте, в энергетике и т.д. Внутренняя логика устройства позволяет сократить парк используемых электромагнитных реле, снижая затраты на проектирование и эксплуатацию системы.
В категории представлены ОВЕН ПР110, ОВЕН ПР114, ОВЕН ПР200, ОВЕН ПР100. Линейка программируемых реле ОВЕН ПР предназначена для построения локальных автоматизированных систем управления на основе релейной логики: задач релейной защиты и контроля, управления наружным и внутренним освещением, освещением витрин, управления технологическим оборудованием (насосами, вентиляторами, компрессорами, прессами).
Линейка программируемых реле ОВЕН ПР предназначена для построения локальных автоматизированных систем управления на основе релейной логики: задач релейной защиты и контроля, управления наружным и внутренним освещением, освещением витрин, управления технологическим оборудованием (насосами, вентиляторами, компрессорами, прессами).
Если для построения системы автоматизации недостаточно дискретных или аналоговых входов/выходов для ПР200, рекомендуется использовать модули расширения по внутренней шине: для дискретных сигналов – ПРМ-1, для аналоговых – ПРМ-3.
Купить программируемые реле производства ОВЕН по всей Украине можно связавшись с менеджером компании по приведенным на сайте телефонам. Группа технической поддержки проконсультирует по всем вопросам, связанным с монтажом, наладкой и эксплуатацией оборудования в режиме 24/7.
Ниже представлена сравнительная таблица для выбора модели программируемого реле.
Параметр | ПР110 | ПР114 | ПР100 | ПР200-x. | ПР200-x.2 | ПР200-x.3 | ПР200-x.4 |
Питание | =24В или ~220В | =24В или ~220В | =24В или ~220В | =24В или ~220В | =24В или ~220В | =24В или ~220В | =24В или ~220В |
DI | 8-12* | 8 | 4-8* | 8 | 8 | 8 | 8 |
AI | – | 4 | 4* | – | 4 | 4 | 4 |
DO | 4-8* | 4-8* | 4-8* | 6 | 8 | 8 | 8 |
AO | – | 4 | – | – | 2 | 2 | 2 |
Интерфейс | RS-485, модуль | RS-485×1 | RS-485×2* | RS-485×2* | RS-485×2* | RS-485×2* | |
Протокол | ModBus RTU/ASCII | ||||||
-режим работы | Slave | Master/Slave | |||||
Возможность расширения | – | – | – | Да, до двух модулей серии ПРМ-1(3) | |||
Часы реального времени | Опционально, (ионистор) | Да, (батарейка до 8 лет) | |||||
Программирование | Комплект ПР-КП20 (USB) | USB порт | |||||
Наличие экрана | – | Да | |||||
-тип | – | Символьный | |||||
-размер | – | 16×2 | |||||
Кнопки | – | 6 кнопок | |||||
 1
1*-зависит от модификации
Логические реле ONI · Овен-Уфа — средства автоматизации производства
Общие сведения
Программируемые логические реле ONI PLR-S являются устройствами «все в одном». Уже в модуле ЦПУ у них есть полнофункциональный набор входов и выходов, а также клавиши управления и встроенный дисплей, позволяющие производить настройку параметров работы оборудования без применения программаторов и персональных компьютеров.
Уже в модуле ЦПУ у них есть полнофункциональный набор входов и выходов, а также клавиши управления и встроенный дисплей, позволяющие производить настройку параметров работы оборудования без применения программаторов и персональных компьютеров.
Несмотря на то что ONI PLR-S относится к классу логических реле, они обладают высокой надежностью и производительностью при разумной цене.
Применение
Программируемые логические реле ONI PLR-S находят применение при построении таких автоматизированных систем как:
- управления транспортеров
- управления насосами
- приточно-вытяжной вентиляции
- подготовки пара и сбора конденсата
- распределения электроэнергии и управления освещением
- сбора и предварительной обработки сигналов
- управления компрессорами
Особенности
Модульная конструкция и широкая номенклатура позволяют сконфигурировать логическое реле ONI PLR-S для решения задач контроля и управления локальным оборудованием.
Для заказа доступно 3 варианта модуля центрального процессора, к каждому из которых можно дополнительно установить до 16 модулей расширения, тем самым увеличив количество каналов ввода вывода до 280. Все модули монтируются на стандартную DIN рейку шириной 35 мм.
Программирование данного оборудования осуществляется с помощью программного обеспечения для разработки и отладки проектов, которое предоставляется бесплатно. Оно обладает интуитивно понятным интерфейсом и поставляется с широким набором готовых функциональный блоков и специальных программ, что позволяет существенно ускорить процесс разработки и отладки проектов. Для разработки пользовательских программ доступно 2 языка: LD и FBD, соответствующих стандарту МЭК 61131-3. Емкость программы составляет до 1024 блоков.
Программируемые логические реле ONI PLR-S имеют интерфейс RS485 с широко распространенным протоколом связи Modbus RTU. При этом они способны работать как в режиме Master, так и в режиме Slave не только с дополнительным коммуникационным модулем, но и в версиях с интегрированным интерфейсом в модуле ЦПУ.

Наличие протокола Modbus RTU позволяет легко обеспечить обмен данными с разнообразным оборудованием автоматизации, например, с панелями оператора или частотными преобразователями. Также Вы можете использовать программируемые логические реле серии ONI PLR-S в качестве станций удаленного ввода-вывода без их программирования.
- Сертификат на логические реле ONI. Скачать
- Листовка «Логические реле ONI». Скачать
- Паспорт на логические реле ONI. Скачать
- Системное руководство. Скачать
- Каталог программируемых логических реле. Скачать
- Листовка по программируемым логическим реле. Скачать
Если вы нашли ошибку, пожалуйста, выделите фрагмент текста и нажмите Ctrl+Enter.
Программируемые интеллектуальные реле
С помощью логических элементов довольно легко реализуются функции алгебры логики, которая является костяком устройств автоматики и вычислительных машин. Логические элементы могут реализовываться огромным количеством способов в зависимости от надобности и состоять из полупроводниковых, релейных, интегральных, пневматических и других элементов и схем.
Между величинами, входящими и выходящими из логического элемента, существует определенная зависимость, которая называется функциональной и обозначается как y = f(x) для устройств с одной переменной и как y = f(x 1 , x 2) для устройств с двумя переменными величинами. В этой записи Х называют независимую переменную или аргумент, а Y – зависимая переменная, так как ее значение напрямую зависит от значения аргумента Х.
Ниже показана таблица логических элементов и эквивалентных им положений контактов реле:
Функция повторения
Реализуется логическим элементом повторителем (пункт 1 в таблице). Повторитель можно сравнить с нормально открытым контактом реле. При открытом контакте Х=0 и, соответственно Y=0, то есть цепь находится в непроводящем состоянии, а при закрытом наоборот Х=1 и Y=1, то есть цепь находится в проводящем состоянии.
Функция отрицания
Реализует данную функцию логический элемент НЕ или как его часто называют – инвертор (пункт 2 в таблице).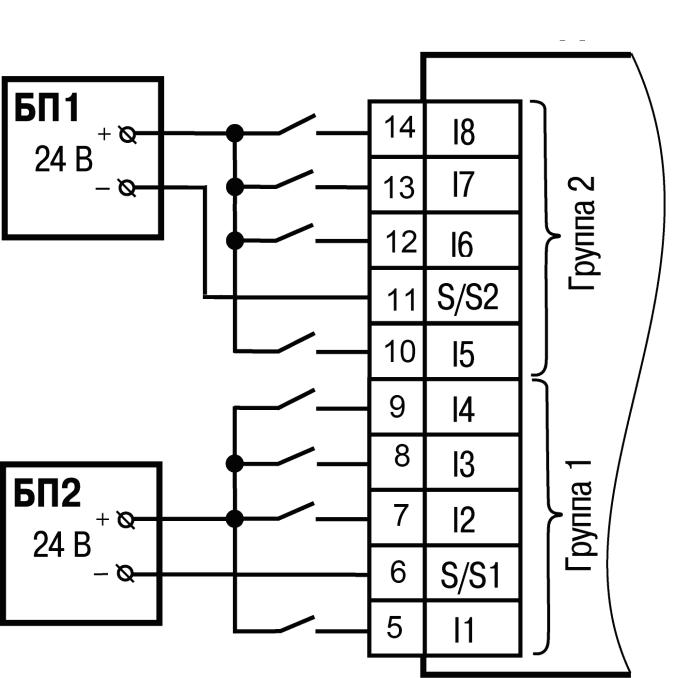 Его сравнивают с нормально закрытым контактом реле, когда при отсутствии напряжения на катушке управления (Х=0) его контакт находится в проводящем состоянии (Y=1). При подаче напряжения на катушку (Х=1) контакт размыкается и разрывает цепь (Y=0).
Его сравнивают с нормально закрытым контактом реле, когда при отсутствии напряжения на катушке управления (Х=0) его контакт находится в проводящем состоянии (Y=1). При подаче напряжения на катушку (Х=1) контакт размыкается и разрывает цепь (Y=0).
Функция логического сложения
В схемотехнике носит название дизъюнкция или функция ИЛИ (пункт 3 в таблице). Реализуема эта функция логическим элементом дизъюнктором. Суть данной операции заключается в логическом суммировании входных сигналов X для получения результирующего сигнала на выходе Y. Описывается данная зависимость простой формулой X 1 + X 2 = Y. Вот примеры – 0+0=1, 1+0=1,0+1=1,1+1=1. На примере обычного реле – это два параллельно подключенных нормально разомкнутых контакта. Если один контакт разомкнут, то проводимость цепи обеспечит второй, замкнутый контакт. Для того что бы цепь оказалась разорванной, необходимо разомкнуть оба контакта.
Функция логического умножения
В схемотехнике носит название конъюнкция или функция И (пункт 4 в таблице). Реализует ее специальный логический элемент – конъюктор. Данная функция – логическое перемножение сигналов:
Реализует ее специальный логический элемент – конъюктор. Данная функция – логическое перемножение сигналов:
Если сравнить с реле – то это два последовательно включенные нормально открытые контакты. А при таком подключении контактов реле проводимость можно получить только в случае, когда оба контакта замкнуты.
Функция равнозначности
Имеет следующий вид — X 1 ≡X 2 = Y или в виде логических символов: 0≡0 =1; 1≡0 = 0; 0≡1 = 0; 1≡1 = 1.
Значения 1 будет только при условии, что X 1 = X 2 . Эквивалентом в релейной схеме будет два последовательно включенных переключающихся контакта (пункт 5 в таблице).
Противоположная функции равнозначности (пункт 6 в таблице) и часто носит название функции сложности по модулю m2.
Программируемые реле – доступные устройства, предназначенные для автоматизации технологических процессов. Реализуют линейные и слаборазветвленные алгоритмы управления, выполняют простые вычисления. Широко используются в транспортной отрасли, сельском и коммунальном хозяйствах. Позволяют управлять подъемниками, освещением, вентиляторами, насосами и др.
Позволяют управлять подъемниками, освещением, вентиляторами, насосами и др.
Компания «ИнСАТ» предлагает приобрести программируемые реле марки ОВЕН. Продукция от отечественного производителя известна высоким качеством и надежностью. В каталоге представлены различные модели промышленной автоматики:
- ПР-110,
- ПР-114,
- ПР-МИ485.
При выборе оборудования обращайте внимание на основные характеристики:
- число входов и выходов,
- протоколы связи,
- среду программирования,
- максимальную скорость обмена,
- механический и электрический ресурс реле,
- степень защиты корпуса,
- средний срок службы.
Чтобы купить программируемые реле ОВЕН, добавьте выбранные позиции в корзину и заполните форму заказа. В заявке укажите контактные данные для обратной связи. Доставка промышленной автоматики производится во все регионы РФ. Полную информацию о предлагаемой продукции узнавайте у менеджера по телефону, указанному в разделе «Контакты».
ОВЕН ПР-114 ОВЕН ПР-114 – это свободно программируемое устройство, которое не содержит в своей памяти заранее написанной программы. Алгоритм работы программируемого реле формируется непосредственно пользователем, что делает прибор универсальным и дает возможность широко использовать его в различных областях промышленности, сельском хозяйстве, ЖКХ и на транспорте.
ОВЕН ПРМ Модуль расширения ОВЕН ПРМ предназначен для увеличения количества входов и выходов программируемого реле ОВЕН ПР200. Подключение модулей осуществляется по внутренней шине. К ПР200 можно подключить до двух модулей расширения ввода/вывода. Входы модуля гальванически развязаны относительно питания и относительно друг друга (по 4 входа). Модули имеют свое независимое питание и индивидуальную гальваническую развязку выходов, что повышает надежность системы. Существуют две модификации модулей с питанием на 24 В или 220 В.
Программируемые интеллектуальные реле являются одной из разновидностей ПЛК (программируемые логические контроллеры). Применение интеллектуальных реле позволяет значительно упростить схемы управления электрооборудованием, повысить их надежность.
Применение интеллектуальных реле позволяет значительно упростить схемы управления электрооборудованием, повысить их надежность.
Задание программы для интеллектуальных реле производится при помощи кнопок на лицевой панели и небольшого, как правило, в одну – две строки LCD индикатора. Хотя существуют и более сложные конструкции, и в этих случаях программы приходится писать на персональном компьютере, с использованием специализированных языков программирования релейной логики LD, FBD и некоторых других.
Для загрузки (прошивки) готовых программ в память микроконтроллера используются интерфейсы типа RS-232, RS-485 или Industrial Ethernet, позволяющие также осуществлять связь с АСУ верхнего уровня. Некоторые модели программируемых интеллектуальных реле
позволяют наращивать возможности коммуникации при помощи специальных модулей расширения.
Отличие интеллектуальных реле от полноценных ПЛК в том, что они обладают малым объемом оперативной и программной памяти
, а это приводит к невозможности хоть сколько-нибудь сложных математических вычислений. Кроме того количество каналов ввода – вывода как цифровых, так и аналоговых у интеллектуальных реле также невелико
, поэтому область их применения достаточно ограничена. Прежде всего, это автоматизация отдельных агрегатов, управление системами освещения, некоторыми устройствами в системе ЖКХ, локальные контуры различных систем автоматизации, бытовая техника.
Кроме того количество каналов ввода – вывода как цифровых, так и аналоговых у интеллектуальных реле также невелико
, поэтому область их применения достаточно ограничена. Прежде всего, это автоматизация отдельных агрегатов, управление системами освещения, некоторыми устройствами в системе ЖКХ, локальные контуры различных систем автоматизации, бытовая техника.
Особенностью таких устройств является их локальное применение для небольших систем, а так же программа для них в основном создается на языке функциональных блоковых диаграмм (FBD) или на языке релейной логики (LD). Эти языки соответствуют международному стандарту МЭК 61131-3. Программное обеспечение таких реле имеет удобный и дружелюбный интерфейс и позволяет разработать программы в короткий срок, проверить синтаксис и верность созданной программы, а так же имеет возможность провести отладку программы в реальном времени, которая ясно дает представление о том, как будет вести себя контроллер в той или иной ситуации.
Конструкция программируемых интеллектуальных реле
чаще всего моноблочная, – в одном небольшом корпусе содержатся все узлы. Это, как правило, блок питания небольшой мощности, микроконтроллер, каналы ввода и вывода информации, клеммы для подключения исполнительных устройств. Корпуса таких устройств невелики и позволяют установку в электрических шкафах на DIN – рейку, что соответствует современным стандартам. Впрочем, блок питания может быть и отдельным устройством.
Это, как правило, блок питания небольшой мощности, микроконтроллер, каналы ввода и вывода информации, клеммы для подключения исполнительных устройств. Корпуса таких устройств невелики и позволяют установку в электрических шкафах на DIN – рейку, что соответствует современным стандартам. Впрочем, блок питания может быть и отдельным устройством.
Программируемые интеллектуальные реле зарубежного производства
Программируемые реле сейчас выпускаются многими фирмами, большей частью зарубежными. В качестве примера можно вспомнить фирму Schneider Electric , которая была основана в 1936 году во Франции. Ее штаб-квартира находится в городе Rueil-Malmaison Cedex. Свои изделия фирма выпускает под торговыми марками Telemecanique, Merlin Gerin, Modicon.
Продукция фирмы Schneider Electric весьма разнообразна: от обычных , до таких сложных устройств как частотные преобразователи, устройства сигнализации и управления, устройства плавного пуска, реле контроля, датчики и программируемые реле и контроллеры. В качестве примера интеллектуального реле рассмотрим программируемые реле Zelio Logic
.
В качестве примера интеллектуального реле рассмотрим программируемые реле Zelio Logic
.
Программируемые реле Zelio Logic фирмы Schneider Electric позволяют реализовать небольшие системы управления, количество вводов/выводов которых находится в пределах 10…40 каналов. В корпусе размерами 124,6*90*59 мм удается разместить до 26 каналов ввода/вывода. При этом напряжение питания устройства находится в очень широких пределах: 24VAC, 100… 240VAC, 12VDC, 24VDC, что позволяет легко встраивать реле в любые конструктивы.
Например, реле серии SR2B201FU имеет 12 дискретных входов и 8 релейных выходов, рассчитан на напряжение питания переменного тока 100 – 240В и имеет в своём составе часы, дисплей и набор кнопок. Внешний вид интеллектуального реле в моноблочном исполнении показан на рисунке.
Для программирования реле Zelio Logic возможно применение двух специализированных языков FBD или LADDER. Устройство выпускается как в моноблочном исполнении, так и в модульном. Последний вариант позволяет объединение модулей для расширения системы в целом.
Последний вариант позволяет объединение модулей для расширения системы в целом.
Область применения реле Zelio Logic достаточно широка и предусматривает управление компрессорами или насосами, подсчет готовых изделий или комплектующих на автоматических линиях, управление эскалаторами, освещением и электронными табло. Возможно применение в системах охраны в качестве устройств контроля доступа.
Кроме упомянутой Schneider Electric производством программируемых реле занимается еще целый ряд зарубежных фирм: OMRON, Control Techniques, SIEMENS, Mitsubishi Electric, Danfoss, ABB, Moeller, Braun, Allen Bradley, Autonics, Array Electronic, Eaton.
Самые популярные программируемые интеллектуальные реле: Siemens LOGO!, Omron ZEN, Schneider Electric Zelo Logic, Easy Moeller, Mitsubishi Alpha XL, Delta Electronics DVP-PM, Eaton
e
asy500, e
asy8
00, xLogic ELC, Owen Logo, Oni Logo, PRO-Relay, ОВЕН ПР110, ОВЕН ПР200.
Программируемые логические контроллеры тайваньской компании Array Electronic серии FAB
Для промышленного и бытового применения компанией выпускаются интеллектуальные реле второго поколения серии FAB. Эти устройства достаточно просты в эксплуатации и легко поддаются изучению и программированию. Для программирования реле FAB используется язык программирования FDB, предназначенный, в основном, для инженеров, занимающихся автоматизацией. С его помощью можно создать достаточно сложную систему, при этом эффективную и экономичную.
Эти устройства достаточно просты в эксплуатации и легко поддаются изучению и программированию. Для программирования реле FAB используется язык программирования FDB, предназначенный, в основном, для инженеров, занимающихся автоматизацией. С его помощью можно создать достаточно сложную систему, при этом эффективную и экономичную.
Язык программирования FDB представляет язык блоков, которые в процессе ввода программы показываются на дисплее. Функциональные блоки просто выстраиваются и объединяются в определенной последовательности, как последовательно, так и параллельно, что позволяет наглядно создавать достаточно сложные алгоритмы. При этом не требуется знания каких-либо языков программирования. Для того, кто когда-то занимался обслуживанием цифровой техники, например, станков с ЧПУ, этот язык не вызовет затруднений.
Всего в языке имеется 20 блоков, выполняющих различные функции. Прежде всего, это логические операции, внешне напоминающие картинки из справочника по цифровым микросхемам. На рисунке показан фрагмент из двух блоков.
На рисунке показан фрагмент из двух блоков.
Кроме логических операций в наборе блоков имеются также счетчики, таймеры, задержки времени, метки времени включения и выключения, и другие.
Среда программирования поставляется совместно с устройствами, а также доступна для скачивания с сайта производителя. Интеллектуальные реле серии FAB заменяют собой большое количество коммутационных устройств: реле, тахометры, счетчики, таймеры и т.п. при этом по достаточно низкой цене. Одно программируемое интеллектуальное реле позволяет заменить целый шкаф, собранный на обычных . При этом надежность схемы в целом возрастает, количество дискретных элементов уменьшается, снижаются габариты, уменьшается энергопотребление.
Области применения интеллектуальных реле FAB достаточно широки. Это системы умного дома; автоматическое открывание дверей, шлагбаумов и ворот; как внутренним, так и наружным; управление вентиляцией и регулирование температуры на предприятиях и в жилых помещениях, в оранжереях и теплицах. А также , управление производственными линиями и отдельными станками, применение в системах охранной сигнализации, в аварийных системах оповещения и многое другое.
А также , управление производственными линиями и отдельными станками, применение в системах охранной сигнализации, в аварийных системах оповещения и многое другое.
Краткие технические характеристики интеллектуальных реле FAB
Реле оснащено LCD дисплеем имеющем 4 строки по 10 символов, имеется встроенный календарь и часы реального времени. Возможно дистанционное управление по телефонным линиям, и возможность передачи голосовых сообщений. В комплекте поставки идет бесплатная простая программа SCADA позволяющая осуществлять связь с ПК на достаточно большое расстояние, что дает возможность дистанционного мониторинга и настройки. В случае использования интерфейса RS – 485 к одному ПК могут быть подключены 255 реле FAB. Такое подключение позволяет создавать более функциональные системы, чем при использовании одиночных FAB реле.
Выходы устройства имеют высокую нагрузочную способность: релейные – 10А, транзисторные выходы – 2А.
Хотя память программы невелика – всего 64К, программа может содержать 127 функциональных блоков, 127 счетчиков, 127 интервалов RTC (реального времени), 127 таймеров, что позволяет создавать достаточно сложные функциональные программы. Ввод программы осуществляется либо с помощью кнопок и LCD–дисплея, либо с использованием ПК. Для защиты программы от несанкционированного доступа возможна защита паролем.
Ввод программы осуществляется либо с помощью кнопок и LCD–дисплея, либо с использованием ПК. Для защиты программы от несанкционированного доступа возможна защита паролем.
В России выпуском программируемых реле занимаются воронежская фирма «Овен» и нижегородская «КонтрАвт». Фирма «Овен» выпускает свои реле под названием Овен ПЛК ***.
Воронежским ЗАО «Экоресурс» выпускается серия контроллеров «Базис», включающая в себя несколько модификаций прибора. В журналах «Автоматизация в промышленности», «Приборостроение и средства автоматизации» и «Промышленные АСУ и контроллеры» содержится целый цикл статей по применению контроллеров серии «Базис».
Некоторые фирмы занимаются распространением и продажей в России импортных брендов. Например, фирма Интехникс, торговый партнер английской компании Invertek Drives, занимающейся производством столь популярных в последнее время , поставляет в Россию и программируемые интеллектуальные реле, столь необходимые для создания систем автоматизации.
Примеры применения реле
Обеспечение непрерывной работы только в будние дни с 8:00 до 18:00. · С 18:00 до 20:00 включение эскалатора только при появлении человека.
Включение вентиляции каждые 30 минут на 10 минут. Включение вентиляции на 10 минут при превышении заданного уровня СО2.
Автоматический ввод резерва при 2-х и более вводах. Секционирование. Включение/отключение потребителей. Включение/отключение ДГУ и других источников.
Пример разработки программы для реле
Пусть необходимо разработать программу управления смесителя для программируемого интеллектуального реле ZelioLogic на языке FBD, задача звучит следующим образом.
В вертикальную емкость высотой 7м подается жидкость №1 до достижения уровня в 2,8м. После чего подача первой жидкости прекращается и подается жидкость №2 до достижения общего уровня в 4,2м. После чего подача второй жидкости прекращается и включается двигатель перемешивающего устройства, который работает в течение 30 минут. По истечению времени двигатель отключается и открывается кран слива суспензии.
По истечению времени двигатель отключается и открывается кран слива суспензии.
Для решения задачи необходимо в первую очередь преобразовать значения уровня в данные понятные для контроллера, т.е. значению уровня в 2,8 м, исходя из разрядности встроенного АЦП, будет соответствовать значение на входе контроллера равное 102, а уровню в 4,2 м значение 153.
Так же, исходя из условий задачи, выходы контроллера должны взаимодействовать с тремя запорными клапанами – подача жидкости №1, подача жидкости №2, слив суспензии и с одним двигателем для мешалки. В решении данной задачи целесообразно на вход контроллера подключить кнопку, которая обеспечит запуск всей системы.
Разработка программы производится с применением компьютера, на котором установлено программное обеспечение ZelioSoft 2.
Графический язык программирования контроллеров FBD использует различные функциональные блоки. Каждый блок представляет собой часть законченной программы, обеспечивающая конкретную функциональную связь между входными и выходными переменными.
Соединение блоков приводит к объединению отдельных модулей в единую управляющую программу, которая в соответствии со значениями входных переменных датчиков, подключенных к входам программируемого реле, формирует управляющие сигналы для исполнительных механизмов, подключенных к выходам.
Таким образом, процесс программирования сводится к выбору различных функциональных блоков, размещению их в окне редактирования и соединению в определенной последовательности, обеспечивающей решение конкретной задачи автоматизированного управления процессом или объектом.
Для решения поставленной задачи выбраны и соединены необходимые блоки и установлены их параметры, обеспечивающие заданную логику работы.
Графическое представление программы в среде ZelioSoft2 с помощью FBD, выполняющей решение данной задачи приведено на рисунке.
Проверка правильности настройки отдельных блоков и их соединений производится в режиме симуляции. Убедившись в правильности работы программы, её переносят с инструментального компьютера в память программируемого реле.
Вывод
Интеллектуальны программируемые реле, несмотря на свои недостатки, могут выполнять ряд задач в производственных и непроизводственных сферах, в которых нет необходимости использовать программируемые логические контроллеры (ПЛК).
Также они значительно дешевле ПЛК, что позволяет сэкономить в процессе модернизации, либо автоматизации ручного или автоматического процесса. Для того чтобы запрограммировать интеллектуальное программируемое реле, пользователю не обязательно обладать навыками программирования, можно использовать набор типовым программ. Интеллектуальные реле просты в программировании.

 Принцип действия.
Принцип действия.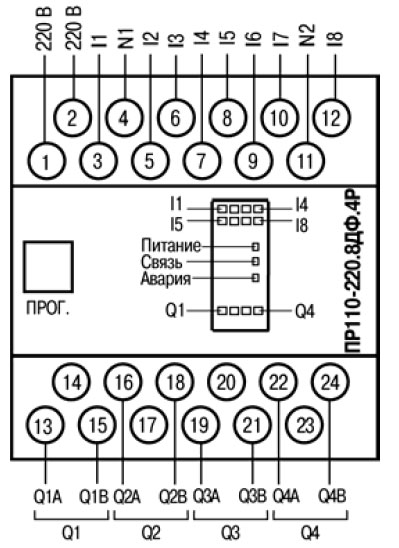 Мертвая зона. Схемы включения реле направления мощности.
Мертвая зона. Схемы включения реле направления мощности.
Логические реле .
1. Реле времени. КТ 2. Промежуточные реле КL. 3. Указательные реле КН.
Промежуточное реле .
Они имеют электромагнитную систему с поворотным якорем. Их назначение:
1. Увеличение контактов основного реле.
2. Увеличение коммутационной способности схемы. Разгрузка контактов основного реле.
Промежуточные
реле выполняются с одной или несколькими
обмотками, с включением по напряжению,
по току или по току и напряжению.
Промежуточное реле с обмотками по напряжению включается на полное напряжение источника оперативного тока (обмотки напряжения). С обмотками по току включается последовательно с обмотками других аппаратов (обмотки тока).
Выпускаются на напряжение постоянного тока 12, 24, 48, 110 ,220 В и переменного тока 127, 220, 380 В.
Промежуточные реле различаются:
1. По количеству обмоток. 2. По типу обмоток. 3. По числу, состоянию и мощности контактов.
4. По времени срабатывания и возврата.
К промежуточным реле предъявляются высокие требования по быстродействию. Время их срабатывания не должно превышать 0,01-0,03 с.
Напряжение срабатывания Uср=0,7 Uном.
Реле постоянного тока типа РП-23, Рп-24.
Время срабатывания
Выпускаются на напряжение постоянного тока 12, 24, 48, 110 ,220 В
Устройство реле РП-23. Имеется:
Электромагнит с обмоткой;
Якорь, который может менять свое положение;
Неподвижные и подвижные контакты;
Возвратная пружина;
Регулировочные
пластины.
Имеется регулировочное устройство, которое регулирует расстояние зазора между якорем и эл.магнитом.
Реле постоянного тока типа РП-211, РП-215. Малогабаритные, быстродействующие. Отличаются типом, количеством контактов и обмоток. Время срабатывания 0,02 с. Мощность 5 Вт.
Аналогичные РП-23 промежуточные реле на переменном оперативном токе имеют магнитопровод из листов электротехнической стали. На полюс электромагнита намотан короткозамкнутый виток, для предотвращения вибрации подвижной системы. Типы реле переменного тока РП-25, РП-26.
Недостатки:
1. Возможность отказа при срабатывании из-за снижения напряжения в сети.
2. Значительная мощность, потребляемая при срабатывании.
Меньше недостатков
имеют реле переменного тока типа РП-321
и РП-341. В их схеме используется
промежуточное реле постоянного тока,подключенное к выпрямителю. Это снижает
мощность при срабатывании. Реле имеет
насыщающийся трансформатор. Он
ограничивает ток и напряжение во
вторичной цепи, облегчая работу контактов
управляющих реле, и потребление мощности
реле. Имеются малогабаритные реле типов
РМУГ, РЭ, РЭС. Рассчитаны на низкие
напряжения и токи.
Имеются малогабаритные реле типов
РМУГ, РЭ, РЭС. Рассчитаны на низкие
напряжения и токи.
Указательные реле.
Наиболее распространенное реле типа РУ-21.
Назначение – используется в схемах защиты для указания срабатывания РЗиА. Облегчают задачу анализа действия РЗиА и определения характера повреждения. Обмотки этих реле могут включаться как последовательно в цепь, так и параллельно. Наиболее распространены указательные реле с последовательным включением обмоток.
Устройство РУ-21.
1. Электромагнит, состоящий из сердечника.2. Якорь.3. Сигнальный флажок.
4. Контактная система. 5. Возвратная пружина. 6. Скоба.
При прохождении
тока по обмотке якорь притягивается к
сердечнику. При этом сигнальный
флажок выходит из зацепления и под
собственным весом поворачивается. В
результате меняется цвет флажка и
замыкается контактная система. После
исчезновения КЗ ток по обмотке реле не
проходит. Якорь возвращается в
первоначальное положение, а флажок
остается на месте.
Герконовые реле
Недостатки электромеханических реле:
1. Наличие открытых ненадежных контактов, которые подвергаются воздействию окружающей среды.
2. Большое время срабатывания из-за значительной массы подвижного якоря.
Поэтому изобрели герконовые реле. Это электромагнитные реле с герметизированными магнитоуправляемыми контактами.
1 – Стеклянна колба, заполненная инертными газами.
2 – Пружинящие пластины, впаянные в стеклянную колбу.
3- Обмотка.
В нормальном режиме пластины разомкнуты. Ток в обмотке вызывает магнитный поток Ф, проходящий по пластинам. Пластины являются одновременно магнитопроводом, подвижными частями реле и контактными пружинами. Он создает электромагнитную силу, стремящуюся притянуть пластины к друг другу. Пластины смыкаются и замыкают цепь.
Достоинство:
1. Малое время срабатывания (тысячные доли секунды).
2. Малые габариты.
3. Высокая
надежность. Геркон имеет большое число
срабатываний. Порядка 10 12
раз.
Порядка 10 12
раз.
Когда-нибудь каждый до этого доходит… когда понимает СКОЛЬКО реле надо поставить в щиток, чтобы реализовать какую-нибудь сложную логику управления освещением или другой автоматикой. И СКОЛЬКО надо возиться потом, позже, когда логику работы надо поменять. В Московской квартире в санузле у меня есть щиток на 24 модуля, в котором стоит аж (если мне не изменяет память) пять штук реле времени, из которых четыре — дорогущие CT-MFD. И это всё только для того, чтобы открывать-закрывать воду и управлять автоматикой фильтра воды. И каждый раз, когда мне надо поменять логику работы системы, я лазил в этот щиток с отвёрткой… стоя на унитазе;).
И если у вас взрывался мозг, когда вы читали мыло от заказчика с текстом типа
«Хочу чтобы свет в гараже сам включался при открытии ворот на 20 минут. Но чтобы я нажал кнопку — и свет не выключался. А потом чтобы я опять нажал кнопку — и свет снова работал автоматически. А ещё потом я захочу сделать датчик движения, чтобы свет включался, если снаружи к гаражу кто-нибудь подошёл.
»
…то вам пора, как и мне, переходить на другой способ реализации автоматики в щитах, нежели обычные релюшки.
Выходом из этого всего является то, что можно обозвать общим словом «Контроллеры», или детально «Логические реле » и «ПЛК «. Вот я вам про них и расскажу, чтобы описать всякие разные параметры и термины, которые в этой среде используются, ибо термины эти стандартные и понимая их смысл можно разобраться с любым контроллером любой фирмы.
И первое, что мы сделаем — это разберёмся с этим ёмким словом «Контроллер». Контроллер — это в принципе совершенно любая штука, которая чем-нибудь управляет. Можно сказать что выключатель — это ручной контроллер лампы. Или термостат тёплого пола — это контроллер тёплого пола. Сейчас на этом, так же как и на словах «умный дом» начали делать деньги, поэтому ими называют любую продукцию — от датчика движения до мощного сервака, который управляет целым районом или коттеджным посёлком.
Терминология и виды контроллеров.

Для нашей технической области можно описать терминологию и эволюцию систем таким образом:
- Микроконтроллер — это микросхема с её обвязкой, которую ты сам паяешь паяльником и пишешь под него прошивку на СИ или Ассемблере. Обычно микроконтроллер — это низковольтная штука, которая удобна для управления низковольтными устройствами и интерфейсами. Например можно сделать какие-нибудь термометр-часы или светодиодное табло. Можно сделать кодовый замок с текстовым дисплеем или систему управления аквариумом.
В любом случае придётся брать паяльник, блок питания и обвешивать систему релюшками или тиристорами для коммутации нагрузок. А самое для нас неприятное — это то, что такую систему не воткнуть в щиток на DIN-рейку. Для неё надо будет придумывать какой-нибудь корпус (потому что негоже голой печатной плате торчать в щите среди «толстых» силовых проводов) и крепить её на какую-нибудь монтажную панель…
Поэтому микроконтроллеры занимают совсем другую нишу. Они или стоят в уже готовых устройствах (бытовая техника и прочее подобное), или же на их базе делают другие контроллеры, в которых микроконтроллер и его обвязка собраны в единую конструкцию.
Они или стоят в уже готовых устройствах (бытовая техника и прочее подобное), или же на их базе делают другие контроллеры, в которых микроконтроллер и его обвязка собраны в единую конструкцию. - Микрокомпьютеры обычно решают более брутальные задачи, потому что имеют адские вычислительные мощности по сравнению с микроконтроллерами. Но их опять не запихнёшь просто так в обычный щиток и не заставишь их управлять силовыми нагрузками. Да и городить компьютер ради управления светом в гараже (из примера выше) — это жёстко =)
- Специализированные контроллеры и разработки . Это когда какой-нибудь производитель на базе микроконтроллера или микрокомпьютера взял и разработал своё устройство. Чаще всего мы, не зная этого, как раз такими устройствами и пользуемся. Все наши реле напряжения, реле времени, реле приоритета, всякие анализаторы качества сети, регистраторы, контроллеры АВР или блоки управления реле по SMS — как раз такие разработки.
Но беда в том, что исходный код контроллеров, конечно же закрыт от нас и изменить логику работы таких устройств мы можем, крутя только внешние настройки, которые нам предоставил разработчик. И если например нам надо сделать переключение фаз с задержкой — то нам придётся покупать отдельные реле времени и ставить их после заводского переключателя фаз.
И если например нам надо сделать переключение фаз с задержкой — то нам придётся покупать отдельные реле времени и ставить их после заводского переключателя фаз.
Это плохо, но эти устройства самые дешёвые, потому что их производят массово. Если бы такое устройство надо было бы делать штучно под каждую задачу — то оно стоило бы безумных денег! И вот люди подумали, и… - …скрестили микроконтроллер с корпусом на DIN-рейку и возможностью его программировать без знания ассемблера, СИ и паяльника! Получилось Логическое реле (показаны на заглавной фотке поста). Что для нас представляет собой микроконтроллер? Это некая микросхема, у которой есть разные служебные выводы (питание, тактовая частота, управление, интерфейсы связи) и несколько ножек, которые можно сконфигурировать программно как входы или выходы. А потом написать программу, которая ими управляет как нам надо.
Логическое реле — это то же самое, только в более суровом масштабе. Это некий корпус, который крепится на DIN-рейку и имеет некоторое количество входов и выходов. Написав программу, мы можем так же управлять выходами по разным сигналам на входах.
Написав программу, мы можем так же управлять выходами по разным сигналам на входах.
Логическое реле хорошо годится, когда надо автоматизировать простые задачи, чаще всего дискретные вида «включить, подождать, если не … то выключить». Как раз пример света гаража прям идеален для логического реле. Но когда надо обрабатывать тучу данных с большой скоростью и рулить разными приводами или общаться с техникой по удалённым каналам связи, то мощности и ресурсов логического реле уже не хватает. И тут нам нужен… - Прогаммируемый логический контроллер (ПЛК) . Это уже фактически полноценный компьютер, только со своей собственной внутренней операционной системой, которая привязана к конкретному железу ПЛК и его периферии. Если логическое реле программируется чаще всего блок-схемами, «кубиками», то ПЛК программируется обычно текстовой программой (похожей на язык СИ), которая компилируется и загружается в ПЛК.
ПЛК обычно имеет несколько интерфейсов связи (RS-485) при помощи которых он может управлять кучей разных устройств, получаяя и посылая на них разные данные. ПЛК нужен там, где надо иметь много линий ввода-вывода или где надо иметь большую производительность или такие функции, которые не сделать на логическом реле. Логическое реле чаще всего можно программировать прямо с него же самого при помощи кнопок и экранчика. А вот для ПЛК понадобится компьютер и специальная среда разработки.
ПЛК нужен там, где надо иметь много линий ввода-вывода или где надо иметь большую производительность или такие функции, которые не сделать на логическом реле. Логическое реле чаще всего можно программировать прямо с него же самого при помощи кнопок и экранчика. А вот для ПЛК понадобится компьютер и специальная среда разработки.
Что есть внутри? Ресурсы, IO, интерфейсы.
Ввод-вывод (IO) . Это то, посредством чего к контроллерам можно подключать разные внешние устройства: кнопки или датчики, и то, при помощи чего контроллер управляет этими устройствами: лампами, двигателями, обогревателями, насосами.
Входы бывают низковольтными или высоковольтными. Низковольтные входы обычно бывают у контроллеров, которые сами питаются от низкого напряжения (+12, +24 вольта). Такие входы хороши тем, что они чувствительны к слабым сигналам (на них можно прицепить выход с хилого электронного датчика — например мы в одном из щитов подключили датчики протечки от системы «Нептун» к ПЛК) и безопасны. Так же низковольтные входы часто быают не цифровыми, а например для измерения температуры и аналоговых сигналов 4..20 мА или 0..10 вольт.
Так же низковольтные входы часто быают не цифровыми, а например для измерения температуры и аналоговых сигналов 4..20 мА или 0..10 вольт.
Если мы хотим подать на низковольтные входы сетевое напряжение, то нам надо будет городить какие-нибудь преобразователи уровня: оптопары или .
Высоковольтные входы чаще всего бывают у контроллеров, которые питаются непосредственно от сети ~230V. На такие входы можно подавать то же напряжение сети, от которого контроллер и питается. Эти входы (и контроллеры с сетевым питанием) удобны для решения простых задач, где мы управляем силовыми нагрузками сразу. То-есть для наших силовых щитов с автоматикой.
Выходы бывают релейные или транзисторные. Релейный выход самый удобный: внутри контроллера стоит мелкое реле, которое замыкает свои контакты по команде с программы в контроллере. А уже при помощи этих контактов мы можем делать что угодно. Только не забывайте, что реле эти чаще всего рассчитаны на ток в 1..3 ампера для ПЛК и в 6. .8А для логических реле! То-есть, коммутировать ими можно или катушку более мощного контактора или пяток ламп (одну группу освещения).
.8А для логических реле! То-есть, коммутировать ими можно или катушку более мощного контактора или пяток ламп (одну группу освещения).
Это делается из-за того, что производитель контроллера не знает чем этот контроллер будет управлять. Если он поставит два десятка силовых реле — то размеры контроллера будут огромные. Поэтому как раз и поступают наоборот: ставят много хилых реле, а там уже разработчик сам решит, где ему штатных реле хватает, а где надо более мощные ставить.
Транзисторный выход чаще всего характерен для низковольтных контроллеров. Внутри контроллера стоит транзистор, который замыкает нужную ножку выхода на GND (минус, землю) питания. При помощи транзистора можно переключать выход с большей скоростью, чем у реле. А можно снова взять интерфейсные реле на больший ток и понавесить их на такие выходы.
Количество линий IO обычно распределяется так:
- У логического реле будет немного входов (8..12..20) и совсем немного выходов (4..6.
 .12..20). Чаще всего тут доступны модели с высоковольным питанием (и высоковольтными выходами). Штатно у реле может быть 8 входов и 4 выхода, а остальные добавляются при помощи специальных модулей расширения.
.12..20). Чаще всего тут доступны модели с высоковольным питанием (и высоковольтными выходами). Штатно у реле может быть 8 входов и 4 выхода, а остальные добавляются при помощи специальных модулей расширения. - У ПЛК IO может быть много, или же вообще никакого. Варианты бывают такие:
* Много (десятки) входов и выходов, но слабеньких: низковольтных и с реле на 1..3А;
* Немного (4..8) входов и выходов тоже слабеньких;
* Без IO на борту. Всё IO реализуется внешними модулями через интерфейс RS-485. И при помощи модулей IO набирается в любом количестве, лишь бы хватило памяти и ресурсов.
Штатно логическое реле задумано для небольших применений и поэтому у него мало IO и есть трудности с его расширением. А ПЛК сразу задуман как сердце большой системы, и поэтому изначально может быть заточен полностью под внешнее IO.
Ресурсы программы . Память .
Память внутри контроллера не бесконечна и имеет свои размеры. Если речь идёт о логическом реле — то там «память» чаще всего измеряется в количестве внутренних блоков: например до 16 таймеров, до 8 счётчиков и до 128 соединений «релейной схемы». Или же до 200 блоков в блок-схеме (FBD). Когда мы создаём программу в контроллере или среде разработки, то они нас и предупредят о том, что память кончается.
Или же до 200 блоков в блок-схеме (FBD). Когда мы создаём программу в контроллере или среде разработки, то они нас и предупредят о том, что память кончается.
У ПЛК память обычно измеряется как в компьютерах — в килобайтах, мегабайтах и прочем. Скажем, в ПЛК может быть 4 мегабайта для памяти программы, 300 кб для памяти ввода-вывода и 1 мегабайт памяти переменных. Память ввода-вывода определяет максимальное количество всяких внешних модулей ввода-вывода (внешнее устройство занимает некоторое количество этой памяти ввода-вывода). Размер использованной памяти в ПЛК нам скажет компилятор среды разработки. И он же предупредит нас, если мы не укладываемся по ресурсам в выбранный ПЛК.
Retain-переменные .
Функционал Retain-переменных или параметров есть почти в каждом логическом реле или ПЛК. На самом деле всё просто: речь идёт о сохранении каких-нибудь значений программы между выключением питания контроллера. Это то, что в микроконтроллерах назвалось FLASH-память, куда программно можно было записать какие-нибудь байтики.
В контроллерах можно сохранить какой-нибудь флаг (вкл-выкл) или целый счётчик (для того, чтобы например считать общее время наработки устройства или импульсы от счётчиков воды). Обычно всё проще простого. Для логических реле часто достаточно поставить галочку, которая будет называться Retain или Retentivity:
А в ПЛК например надо завести нужные переменные в разделе «Retain». Например вот тут я считаю импульсы со счётчиков воды и сохраняю их количество между отключениями питания ПЛК.
Retain-переменные в ПЛК можно сделать любые, а в логических реле их список может быть ограничен всего несколькими объектами. Например таймеры с 6 по 10 могут сохранять свои значения, а таймеры с 1 по 5 не могут. Всё это тоже надо учитывать при разработке таких систем.
Таймеры, Счётчики, Часы .
В контроллерах обычно есть несколько счётчиков и таймеров, при помощи которых можно выдавать всякие импульсы, делать задержки или просто считать входные сигналы (число деталей, число нажатий на кнопку и прочее). Как я уже писал выше, некоторые из них можно настроить так, чтобы они сохраняли насчитанное между отключениями питания контроллера.
Как я уже писал выше, некоторые из них можно настроить так, чтобы они сохраняли насчитанное между отключениями питания контроллера.
Ещё в контроллерах есть часы реального времени . Эта фича может не всегда быть в контроллере и являться опцией. Например в логических реле Eaton Easy/ABB CL то, что внутри есть часы, обозначается буковкой «C» в маркировке контроллера. С часами контроллер легко можно запрограммировать на то, чтобы он давал школьные звонки или в нужное время включал и выключал освещение, насосы, отопление и прочие нагрузки.
Интерфейсы .
Вот тут всё делится на несколько фронтов. Если мы ведём речь о каком-нибудь специализированном контроллере, например CCU825 (это GSM-контроллер для управления разными нагрузками по SMS), то там внешние интерфейсы будут такими, какими их предусмотрел производитель. Могут быть Ethernet, RS-232, RS-485 или USB. А может быть вообще какой-нибудь свой интерфейс для подключения своих датчиков.
Если мы ведём речь о логических реле, то в самых дешёвых и простых моделях вообще нет способов связи этого реле с внешним миром.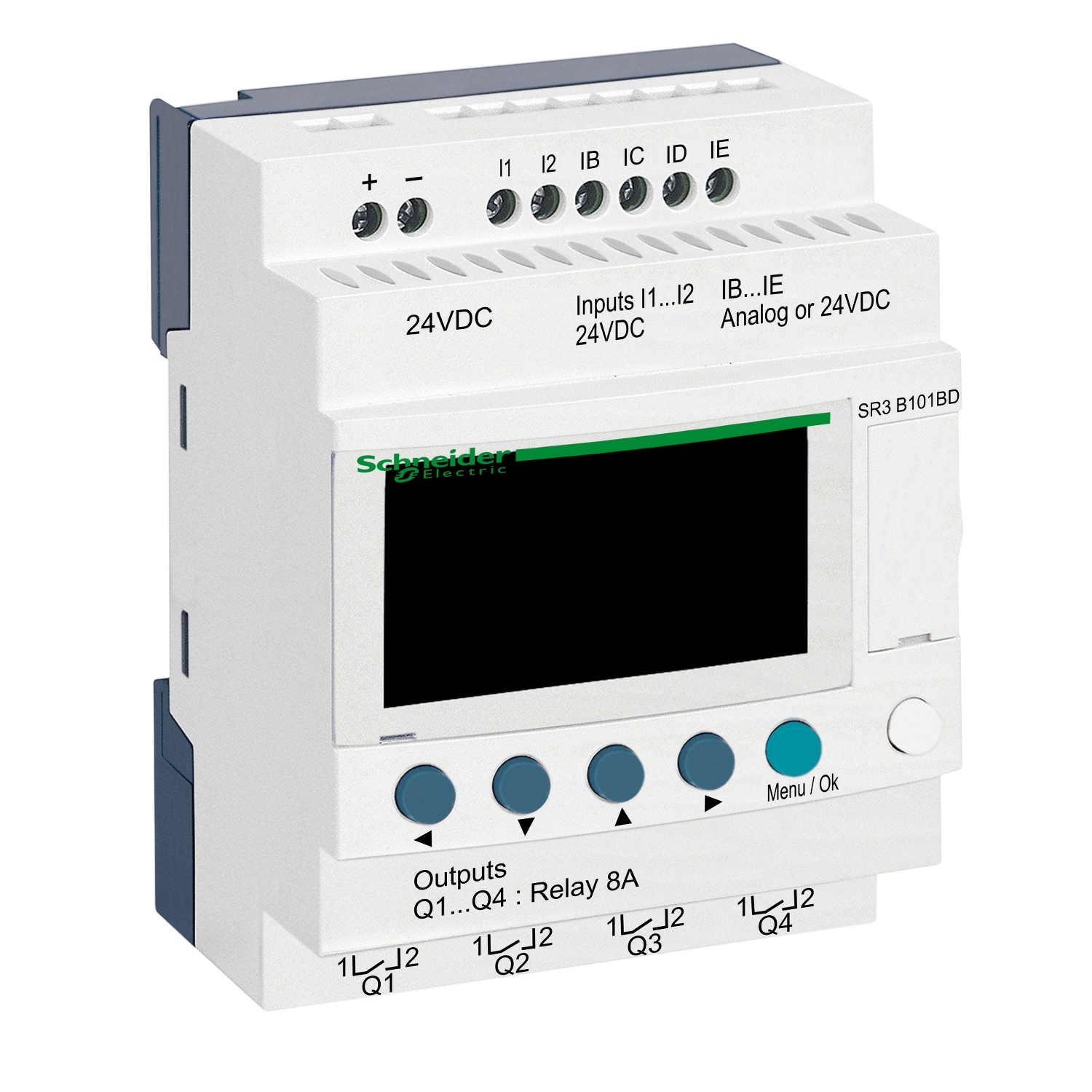 В логических реле покруче сейчас уже появляется интерфейс Ethernet (например в Siemens Logo! 8 версии) или даже специальные модули расширения для связи через GSM. В тех же Siemens Logo! 8 вообще есть встроенный WEB-сервер.
В логических реле покруче сейчас уже появляется интерфейс Ethernet (например в Siemens Logo! 8 версии) или даже специальные модули расширения для связи через GSM. В тех же Siemens Logo! 8 вообще есть встроенный WEB-сервер.
В ПЛК сейчас стандартом является один или несколько интерфейсов RS-485 и интерфейс Ethernet. А дальше в ПЛК будет то, что мы напишем и что подключим. В том числе и WEB-сервер придётся самому писать или использовать какую-нибудь библиотеку из имеющихся в сети.
Про интерфейс RS-485 я расскажу чуть позже.
На чём программируют контроллеры?
В этой сфере есть несколько стандартных языков и даже сред разработки. Я кратенько по ним пройдусь, чтобы все были в курсе того, чего ждать от логического реле или ПЛК.
Релейно-контактная схема (LAD, Ladder Logic) .
Это самый удобный язык для тех, кто раньше делал схемы на обычных релюшках. Потому что этот язык как раз и описывает обычные релюшки, которые могут быть разного типа (реле с самоблокировкой, реле времени, с нормально замкнутыми контактами, с нормально разомкнутыми) и которые срабатывают, когда на них подают питание.
В этом случае мы рисуем схему так же, как её и представляем. Вот например у меня тут какая-то тестовая схема завалялась. Смотрите как всё просто: если замкнулась кнопка I01, то включилось (S) реле Q01. Если замкнулась кнопка I02, то отключилось реле Q01. Это у нас аналог обычного реле с самоблокировкой.
И разница только в том, что все эти реле — не физические, а находятся внутри контроллера. Поэтому взяв какой-нибудь контроллер, вы можете перенести туда вашу схему почти без потерь, а потом уже наворачивать функционал. Например мы с одним камрадом постебались и сделали схему управления освещением ванной на контроллере, которая заменила адски дорогие импульсные реле с центральным управлением.
Такой способ программирования удобен для логических реле, потому что на ПЛК такими схемками много не напрограммируешь. Самые простые логические реле, в которых используется LAD — это реле Eaton Easy / ABB CL, про которые я самыми первыми и буду рассказывать позжее.
Язык FBD (Functional Block Diagram) .
Но если вы раньше хорошо возились не с обычными релюшками, а с цифровыми микросхемами (например я в детстве не вылазил из серии K155), то вам по душе будет язык FBD. Вот просто посмотрите на схему:
Это ж те же самые логические элементы, которые в цифровой логике и приняты! Триггеры, И, ИЛИ, НЕ, Исключающее Или и всякие мульти- или одновибраторы. В этом случае «программа» чертится в виде большой цифровой схемы. Таким способом программируются логические реле Siemens Logo и например логические реле от ОВЕН’а.
Текстовый язык (ST, IL) .
Ну а если вы столкнулись с ПЛК — то там обычно логика сложная, и работать надо не с битами (1/0), а с разными числами: посчитать, сложить, перевести в другие единицы или вообще HTTP-протокол разбирать на составные части. В этом случае можно использовать обычный программный текст, где программа пишется так же, как на СИ или Pascal. Вот кусок кода, где я на коленке накатал защиту от протечек:
Для меня это даже нагляднее, чем FBD или LAD. Потом такой код компилируется и заливается в ПЛК, где и исполняется.
Потом такой код компилируется и заливается в ПЛК, где и исполняется.
Как работают контроллеры?
Контроллеры, про которые мы говорим (а именно Логические реле и ПЛК) работают по одной и той же системе. Наша программа, которую мы туда загрузили, выполняется в цикле много-много раз за секунду.
Для контроллеров даже есть такое понятие как «Задача» — это какой-нибудь кусок программы, который надо выполнять через определённые промежутки времени. В Логическом реле задача всегда одна, а в ПЛК можно насоздавать много задач, которые будут исполняться почти одновременно. Скажем, одна задача будет принимать информацию с датчиков и записывать её во внутренние переменные кода, а другая просто рисовать на экране менюшки и картинки, используя значения из переменных от первой задачи. Экран можно заставить обновляться каждые 100 мс, а датчики опрашивать каждые 20 мс.
В любом случае программа работает таким образом: считываются состояния входов и сигналов. После этого контроллер последовательно вычисляет всю нашу схему и получает сигналы для выходов. И по этим подсчитанным сигналам он выключает нужные выходы. Другими словами, вся наша схема на LAD или FBD на самом деле обсчитывается как несколько логических выражений типа Q1 = I1 AND (NOT I2).
И по этим подсчитанным сигналам он выключает нужные выходы. Другими словами, вся наша схема на LAD или FBD на самом деле обсчитывается как несколько логических выражений типа Q1 = I1 AND (NOT I2).
Как именно контроллер будет обсчитывать схему — не совсем известно. Поэтому в некоторых случаях на сложных схемах могут возникать так называемые «гонки во времени»: когда один участок схемы подсчитался быстро, а второй медленно и из-за этого мы получили на выходе глюки.
Программа в контроллере не обязательно будет работать сразу при подаче питания на него. Её можно останавливать и запускать вручную. Запускаться автоматически при включении контроллера она будет только если вы сами это настроите. А в самой программе можно даже задать значения выходов, которые надо включить при остановленной программе или потере связи (это называется «безопасные значения выходов»).
Интерфейс RS-485 и протокол ModBus.
Теперь поговорим о суровом ломе и основе основ всех ПЛК и промышенной автоматики. Это интерфейс RS-485 . Он является стандартом для подключения всякого внешнего оборудования и связи его между собой. Не надо путать интерфейс с протоколом: RS-485 описывает уровни электрических сигналов и тип кабеля, по которому они передаются. А вот ЧТО именно передаётся — интерфейсу уже не важно.
Это интерфейс RS-485 . Он является стандартом для подключения всякого внешнего оборудования и связи его между собой. Не надо путать интерфейс с протоколом: RS-485 описывает уровни электрических сигналов и тип кабеля, по которому они передаются. А вот ЧТО именно передаётся — интерфейсу уже не важно.
Протокол — это некая программная обёртка, которая описывает уже именно то, что в каком случае значат конкретные байтики, которые передаются между устройствами. И вот протоколов, основной которых является RS-485, много. Это например известенейший протокол DMX-512 для управления сценическим освещением и интересный для нас протокол ModBus, при помощи которого между собой и связываются ПЛК и внешние устройства.
Протокол ModBus — это тоже самый распространённый стандарт обмена данными между устройствами и контроллерами. Действует он просто и достаточно легко. У каждого устройства есть свой адрес (от 1 до 128, кажется), по которому из него можно прочитать данные или записать данные из нужного места памяти. В сети есть главное устройство (Master) и подчинённые, которые исполняют его команды «Запиши ххх», «Прочитай ххх». И всё!
В сети есть главное устройство (Master) и подчинённые, которые исполняют его команды «Запиши ххх», «Прочитай ххх». И всё!
В ModBus места памяти, которые читаются или записываются в устройствах, называются «регистры». У них тоже есть свои адреса, которые называются номерами. Что в каких регистрах хранится, полностью зависит от конкретного устройства и фантазии производителя. Типы регистров могут быть такими:
- BYTE — один байт (8 бит)
- WORD — два байта (16 бит). Ещё называется «Register»
- DWORD — четыре байта (32 бита).
- REAL — число с плавающей точкой
- STRING — строка текста
Полная адресация на шине ModBus может быть такой:
- Устройство, адрес 1
- Регистр BYTE, номер 20
- Регистр REAL, номер 30
- Регистр REAL, номер 30
- Устройство, адрес 2
- Регистр BYTE, номер 20
- Регистр BYTE, номер 30
- Устройство, адрес 5
- Регистр BYTE, номер 1
- Регистр BYTE, номер 2
- Регистр BYTE, номер 3
- Регистр BYTE, номер 4
Теперь соберём краткие знания вместе. Чтобы обмениваться данными между ПЛК и другими устройствами, есть протокол ModBus, который построен на интерфейсе RS-485. Обычно ПЛК является главным устройством (мастером сети). В эту сеть подключаются другие внешние устройства. Настройки сети (скорость обмена, тип протокола) выставляются одинаковыми для всех устройств. Каждому устройству даётся какой-нибудь адрес.
Чтобы обмениваться данными между ПЛК и другими устройствами, есть протокол ModBus, который построен на интерфейсе RS-485. Обычно ПЛК является главным устройством (мастером сети). В эту сеть подключаются другие внешние устройства. Настройки сети (скорость обмена, тип протокола) выставляются одинаковыми для всех устройств. Каждому устройству даётся какой-нибудь адрес.
- Регистр #100. Один байт. Состояние выходов 1..8.
- Регистр #101. Один байт. Состояние выходов 9..16.
- Регистр #200. Два байта. Состояние входов 1..16.
Всё это прописывается в программе ПЛК, после чего ПЛК опрашивает все эти устройства и собирает нам все их данные. Понятно, что адреса устройств не должны меняться, потому что сами устройства являются составной частью системы и программы.
Что есть такого, что управляется по RS-485/ModBus? Да почти всё. Я сам многого не знаю, поэтому приведу примеры из того, о чём слышал:
- Модули ввода-вывода. Вы можете прикупить модули и сделать очень много входов и выходов для своего контроллера.
 Их количество ограничено тормозами ModBus (когда он не будет успевать их опрашивать) и размерами памяти ввода-вывода контроллера. Именно поэтому некоторые ПЛК выпускаются совсем без IO на борту — разработчик сам добавит нужные внешние модули.
Их количество ограничено тормозами ModBus (когда он не будет успевать их опрашивать) и размерами памяти ввода-вывода контроллера. Именно поэтому некоторые ПЛК выпускаются совсем без IO на борту — разработчик сам добавит нужные внешние модули. - Счётчики электроэнергии. К счётчику, если он это поддерживает, можно подключиться по ModBus и снимать с него кучу разных параметров сети. Единственное — счётчик придётся ставить свой собственный, потому что энергосбыт не позволит подключать что-либо к тому счётчику, по которому идёт оплата за электричество.
- Дисплеи и текстовые табло.
- Измерители параметров сети и других данных. Например, у ABB есть крутая система измерения токов по каждой линии отдельно — CMS. А отдаёт она все данные как раз по ModBus.
- Управление освещением, приводами и прочим
Так что если вы слышите RS-485, то следующим вопросом должно быть, поддерживает ли устройство протокол ModBus и есть ли документация по его регистрам!
Особенности конструкции
Самое главное, что надо запомнить в мире контроллеров — это то, что фраза «Устанавливается на DIN-рейку» не всегда означает то, что контроллер встанет в обычный щиток и нормально закроется пластроном. Большая половина контроллеров и всякой промавтоматики действительно устанавливается на DIN-рейку, но только для их крепления.
Большая половина контроллеров и всякой промавтоматики действительно устанавливается на DIN-рейку, но только для их крепления.
Поэтому выбирая контроллер надо проверить, влезет ли он в обычный щиток, или под него придётся городить монтажную панель!
Как и чего выбирать?
Ну и подводим итоги, которые называются так: «Зная о том, какие контроллеры бывают, думайте своей головой». То, какой контроллер выбирать, можно понять если рассортировать задачи, которые мы собираемся решать на них:
- Заменить рассыпуху из кучки реле в силовом щите, где линий вывода мало. Например, какую-нибудь систему управления приводом ворот. Там будет много входов (кнопки, концевики, датчики тока мотора) и немного выходов (мотор вперёд, мотор назад, лампочка аварии).
Или же сделать схемку, куда приходит сигнал с реле освещения, датчика движения, кнопок и которая управляет уличным освещением по часам, нахождению людей и освещённости.
В этом случае наш друг — логическое реле. Оно будет стоить недорого, в некоторых случаях его можно запрограммировать прямо при помощи кнопок и экрана без использования среды разработки и кабеля. А так как его выходы обычно тянут ток в районе 6 ампер, то какое-нибудь освещение небольшой мощности можно включать напрямую без контактора.
А так как его выходы обычно тянут ток в районе 6 ампер, то какое-нибудь освещение небольшой мощности можно включать напрямую без контактора. - Управлять оборудованием (автополив, отопление, АВРы и т.д). Тут всё зависит от того, уложимся ли мы в то количество линий ввода-вывода, которое есть у логических реле. Например, реле от Eaton могут дать нам всего лишь 24 входа и 12 выходов, а Siemens Logo — 24 входа и 16..20 выходов.
Если мы не укладываемся в такое количество линий IO, то начинаются проблемы. Некоторые логические реле можно соединять между собой каскадом, чтобы расширить количество IO. Но иногда по деньгам это получается даже дороже ПЛК и занимает много места.
Так что в этом случае иногда приходится переходить на ПЛК. Например, вот хотим мы закинуть в контроллер 50 групп света, чтобы заменить импульсные реле. И фиг вам сделать это на логическом реле — придётся ставить ПЛК, потому что IO не хватит. - Управлять оборудованием по RS-485/ModBus, иметь много линий ввода-вывода или сложную логику программы (WEB-интерфейс, аналоговые вычисления, сбор данных).
 Тут сразу нужен ПЛК, потому что решать такие задачи на логических реле будет тяжело.
Тут сразу нужен ПЛК, потому что решать такие задачи на логических реле будет тяжело.
Ну и конечно же, если наша задача сводится к тому, чтобы при помощи СМСок или WEB-интерфейса включать и выключать четыре релюшки — лучше сразу использовать готовые решения, которых много на рынке. В этом случае всё будет работать «из коробки» и вам не придётся ничего программировать.
Сейчас я нахожусь в форме существования «ЗАДОЛБАЛО». По разным причинам всякие решения по автоматике управления светом, АВРами, распределением питания или разной автоматикой меня не устраивают. Ограничивать себя, составляя кривые конструкции из релюшек разных фирм или кулибинствовать с паяльником я не хочу. Поэтому я ухожу в контроллеры и свои шкафы буду делать теперь на них.
Мои разработки будут управлять питанием всего дома/коттеджа. На них можно будет повесить управление генератором, инвертором или приводами ворот и рольставен. То-есть щит будет центром всей домашней автоматики. А дом при постановке на охранку будет сам понимать, что где отключить, закрыть и надо ли сразу включать генератор или поработать часа три на инверторе, раз там никто не живёт.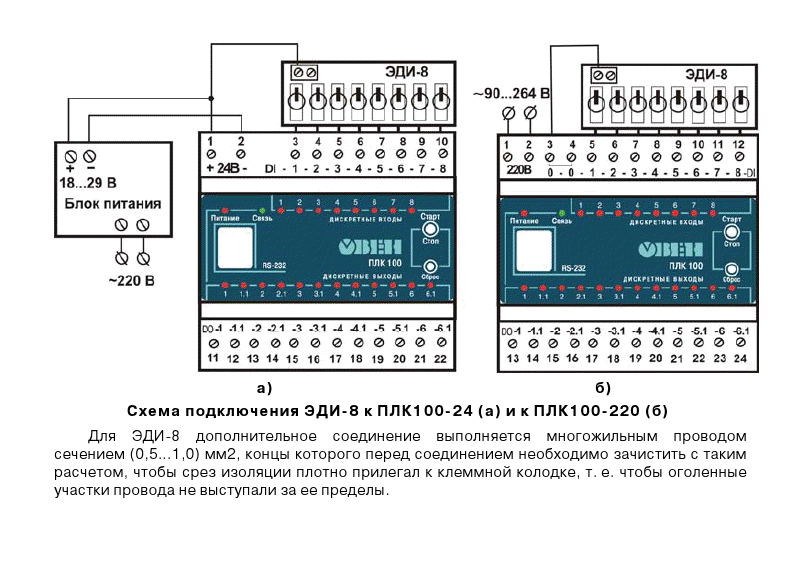
Когда я отработаю свои решения, то я буду продавать их отдельно для других сборщиков щитов. Вот так! А для нашей аудитории напишу несколько постов про контроллеры и могу сделать платный мастер-класс по простым контроллерам для начинающих.
Программируемое логическое устройство управления – заказать в Санкт-Петербурге
В разделе представлены образцы электротехнических программируемых устройств, параметры которых можно менять – программировать – в соответствии с задачами, стоящими перед потребителем. Диапазон возможностей очень широк. Изменения могут касаться индикации с сигналом о достижении предельных значений, визуализации контролируемых величин, порядка действия, а также алгоритма подконтрольных производственных и сервисных систем.
Назначение
Программируемые логические устройства востребованы:
- в различных отраслях промышленности: жилищно-коммунальном хозяйстве
- оснащении складов
- климатических системах
- другом оборудовании.
В зависимости от сложности и разнообразия стоящих задач, количества изменяемых величин и параметров, влияющих на конечный результат. Для простых вариантов можно ограничиться приборами с кнопочным управлением. Для более сложных предпочтительны многострочные сенсорные дисплеи.
Примеры применения
В агрегатах, где требуется только визуальное отображение контролируемой величины (холодильные камеры хранения), используют индикаторы, отображающие цифровую информацию. В поточных производственных скороморозильных линиях требуется отслеживать время прохождения, температуру, скорость воздушных потоков в разных точках. Здесь удобнее применять управление от сенсорного панельного контроллера с возможностью ввода и смены алгоритмов.
Эксплуатационные особенности
В разделе управляющих устройств есть стационарно устанавливаемые и переносные, которые можно использовать для программирования нескольких отдельных приборов смонтированных в разных единицах оборудования.
Кроме функционально законченных блоков, подключаемых к входным/выходным контактам обслуживаемых комплексов, представлены внутренние элементы, интегральные платы, которые применимы для обучения принципам работы программируемых комплектов.
Дополнительные услуги
Для ускоренной адаптации персонала на предприятиях заказчика и упрощения процессов внедрения нового сложного оборудования на базе нашей компании проводятся обучающие курсы. Предоставляются инструкции и методические материалы.
Контроллер для малых систем автоматизации ОВЕН ПЛК150-220.У-М
ОВЕН ПЛК 150 — логический контроллер, который предназначается для малых систем автоматизации. Устройство позволяет:
- формировать системы управления технологическими объектами;
- выстраивать системы диспетчеризации.
Их построение на базе оборудования ОВЕН ПЛК 150 может осуществляться с помощью проводных и беспроводных средств.
Конструктивные особенности устройства
- оборудование имеет DIN-реечный корпус;
- устройство позволяет увеличивать число точек ввода-вывода посредством подключения внешних модулей по одному из имеющихся интерфейсов.
Вычислительные возможности прибора
Оборудование обладает значительными ресурсами при отсутствии ОС:
- мощный процессор RISC архитектуры ARM9 с частотой 200МГц производства Atmel;
- оперативная память — 8 Мб;
- постоянная память — 4 Мб, Flash-память;
- энергозависимая память — 16 Кб.
Базовые преимущества оборудования
- Устройство не имеет операционной системы. Это, в свою очередь, способствует увеличению эксплуатационного срока и повышению надежности оборудования.
- Дискретные входы функционируют со скоростью до 10 кГц.
- Оборудование имеет аналоговые входы и выходы.
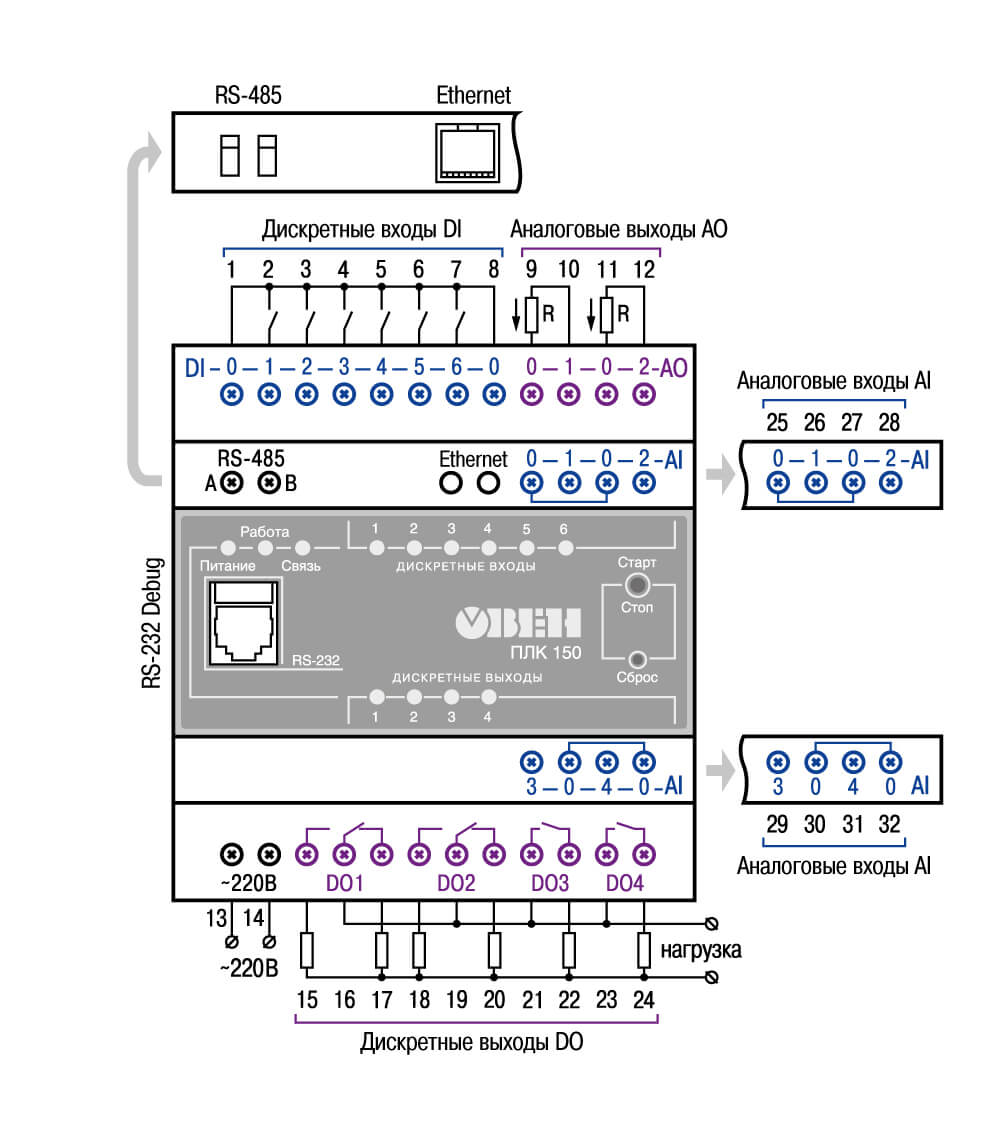
- Прибор предусматривает несколько интерфейсов: Ethernet, 3 последовательных порта: RS-232, RS-232 Debug, RS-485, – которые функционируют независимо друг от друга.
- Оборудование имеет широкий диапазон рабочих температур. Он составляет от – 10 до +55 °С.
- В случае необходимости возможно проведение самодиагностики устройства.

- Изделие имеет встроенные часы.
- В конструкции прибора предусмотрен встроенный аккумулятор. Благодаря ему оборудование может некоторое время функционировать даже после отключения питания.
- Устройство позволяет формировать и сохранять архивы.
- Оборудование может работать по нестандартному проколу по любому из портов. Это дает возможность осуществлять подключение счетчиков, считывателей штрихкодов и других специализированных приборов.
Программирование устройства
Создание ПО для такого оборудования осуществляется при помощи системы программирования CoDeSys v.2.3.6.1. Среда программирования записана на CD, который идет в комплекте с устройством.
Сервисное ПО
Специальная программа для обновления прошивки оборудования и таргет-файлы доступны для скачивания в разделе «Сервисное ПО контроллеров ОВЕН ПЛК 150».
Дополнительные утилиты
Для удобства эксплуатации оборудования вы можете воспользоваться:
- утилитой для технолога EasyWorkPLC.
 С ее помощью можно корректировать параметры, не прибегая к изменению самой программы. EasyWorkPLC функционирует без CoDeSys;
С ее помощью можно корректировать параметры, не прибегая к изменению самой программы. EasyWorkPLC функционирует без CoDeSys; - утилитой для работы с файлами прибора PLC_IO . Она применяется для записи и считывания данных и функционирует без CoDeSys.
Кроме того, клиенты могут воспользоваться утилитой, с помощью которой можно выполнить обновление встроенного программного обеспечения прибора, минуя сервисный центр.
Сертификационная и разрешительная документация
- сертификат соответствия;
- сертификат об утверждении типа средств измерений.
Интерфейсы и протоколы, которые поддерживаются оборудованием
|
ОВЕН |
RS-232 RS-485 |
Поддержка модулей ОВЕН МВА8, МВУ8. Работа в сетях ОВЕН совместно с ТРМ2хх, ТРМ151, ТРМ148, ТРМ133 и т.д. |
|
Modbus RTU Modbus ASCII |
RS-232 RS-485 |
Поддержка модулей ввода/вывода и операторских панелей, связь со SCADA-системами |
|
Modbus TCP |
Ethernet 10/100 Mbps |
Поддержка модулей ввода/вывода, например ADAM-6000, связь со SCADA-системами |
|
DCON |
RS-232 RS-485 |
Поддержка модулей ввода/вывода I-7000, АDAM-4000, операторских панелей |
|
GateWay (протокол CoDeSys) |
RS-232 Ethernet 10/100 Mbps USB-Device |
Программирование контроллера, отладка пользовательской программы (в т.ч. высокоскоростная отладка в режиме Realtime по Ethernet). Работа с файлами на встроенном Flash-диске. |
|
Mass Storage Device |
USB-Device (для ПЛК100) |
Представление Flash-диска ПЛК как внешнего файлового накопителя. Работа с файлами архивов данных и файлами проекта |

 Связь с контроллерами других производителей, сделанных на базе CoDeSys. Работа с OPC-сервером CoDeSys
Связь с контроллерами других производителей, сделанных на базе CoDeSys. Работа с OPC-сервером CoDeSys
Контроллеры ОВЕН ПЛК 150 позволяют организовать шлюз между приборами с протоколом ОВЕН (RS-485) и промышленными сетями с протоколами Modbus, Modbus TCP, DCON.
Пользователь имеет возможность реализовать в среде программирования CoDeSys собственный протокол, не поддерживаемый ОВЕН ПЛК 150. В этом случае он может воспользоваться специальной библиотекой, которая открывает низкоуровневый доступ к последовательным портам ОВЕН ПЛК 150 (библиотека входит в комплект поставки контроллера).
Оборудование позволяет создавать шлюз между устройствами с протоколом ОВЕН (RS-485) и промышленными сетями с протоколами Modbus, Modbus TCP, DCON.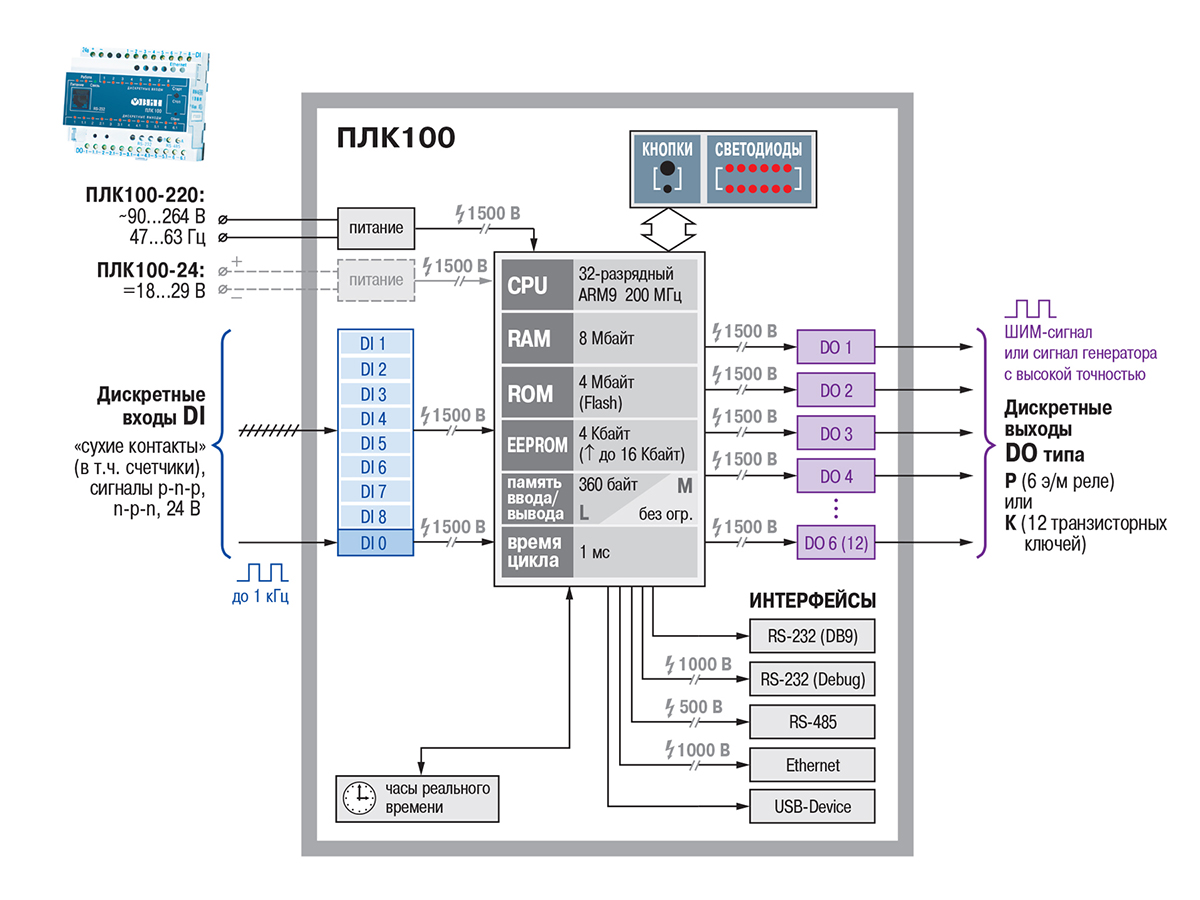 При этом пользователи имеют возможность организовать в программной среде CoDeSys собственный протокол. Можно воспользоваться библиотекой, открывающей доступ к последовательным портам устройства.
При этом пользователи имеют возможность организовать в программной среде CoDeSys собственный протокол. Можно воспользоваться библиотекой, открывающей доступ к последовательным портам устройства.
Элементы индикации и управления
|
Светодиодная индикация отражает:
|
|
|
Кнопка «Старт/Стоп» позволяет запускать и останавливать программы. |
|
|
Скрытая кнопка «Сброс» позволяет перезагрузить устройство. |
Габариты изделия
Схема работы ОВЕН ПЛК 150 в сети
Комплектация оборудования
- Контроллер.
- CD с ПО.
- Кабель программирования
- Паспорт и руководство пользователя.

- Гарантийный талон.
Документация
Relay Computer Two
«До появления интегральных схем существовала космическая программа». – Джек Килби
Вернуться домой
Вернуться к проектам
Заинтересованы в создании схем релейной логики? Рассмотрите возможность покупки модулей релейной логики Catahoula Technologies и узнайте больше о них в проектах релейной логики.
Зачем строить релейный компьютер, если уже есть компьютеры более чем в сто тысяч раз быстрее? Ну, по двум причинам: чтобы доказать, что кремний – это не волшебство, и потому, что я этого хотел.
Простой релейный сумматор был построен с использованием бесплатных реле NOS где-то в 2005 году, но моей целью было когда-нибудь создать более сложное устройство, которое могло бы запускать программы, но не заполняло бы комнату, как ранние компьютеры. Гарри Портер построил невероятный компьютер с 415 реле, который можно увидеть на этой странице: http://web.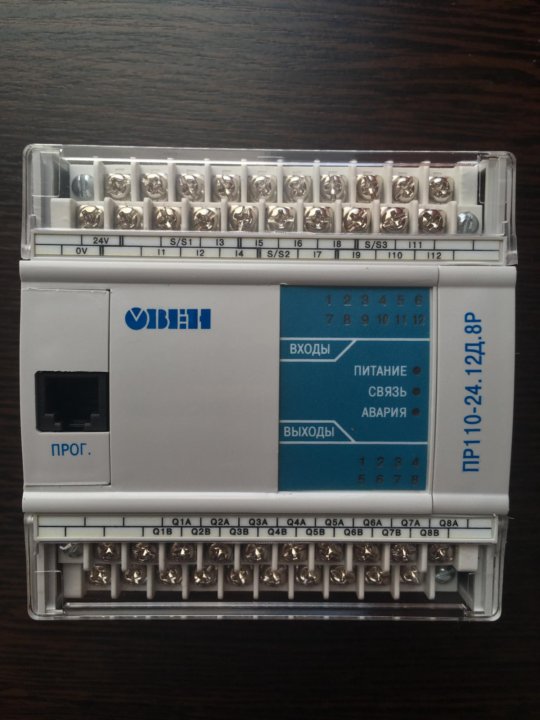 cecs.pdx.edu/~harry/Relay/
cecs.pdx.edu/~harry/Relay/
Никогда не думал, что полностью пойму, как работает его компьютер, не говоря уже о его сборке. Наконец, весной 2007 года я получил больше знаний о компьютерных системах из курса в колледже, а затем пошутил другу об использовании набора инструкций x86 для релейного компьютера для загрузки Windows, что заняло бы несколько сотен лет на релейном компьютере, работающем на Тактовая частота 50 Гц.Так началось вдохновение … (примечание: если вы хотите пропустить детали оборудования компьютера, фотографии и видео находятся в конце этой страницы).
Серьезно, набор инструкций x86 безумно велик для простого релейного компьютера, поэтому я создал свой собственный набор инструкций. Я посмотрел на дизайн компьютера-реле Гарри Портерса в поисках вдохновения и идей для оборудования. Но, во-первых, компьютер не может существовать без реле. После поиска реле у нескольких онлайн-поставщиков электроники, самая низкая цена, которую я смог найти, составляла 1 доллар за реле, поэтому компьютер, использующий более 200 реле, может стать довольно дорогим. Итак, следующим вариантом был ebay, и после терпеливого просмотра нескольких аукционов появилось много 168 реле SPDT, и я купил его примерно за 25 долларов. Несколько недель спустя подошла еще одна партия из 100 реле 4PDT, и я выиграл ее примерно за 14 долларов. Включая стоимость доставки, общая стоимость 268 реле, которые я купил на ebay, составила около 60 долларов. Итак, 268 реле стали моим пределом для компьютерного дизайна. Очевидно, я не пытался копировать релейный компьютер Гарри Портерса, потому что он требовал более 400 реле, но я позаимствовал многие идеи из его конструкции, чтобы мне не пришлось изобретать велосипед.В выходные дни в школе релейный компьютер был разработан с ограничением в 268 реле (которое в конечном итоге увеличилось до 281 реле), 8-битной шиной данных, 16-битной шириной адреса и плавающим нулем. Более того, я создал свою собственную архитектуру набора инструкций (ISA), используя только 5-битные инструкции для простоты.
Итак, следующим вариантом был ebay, и после терпеливого просмотра нескольких аукционов появилось много 168 реле SPDT, и я купил его примерно за 25 долларов. Несколько недель спустя подошла еще одна партия из 100 реле 4PDT, и я выиграл ее примерно за 14 долларов. Включая стоимость доставки, общая стоимость 268 реле, которые я купил на ebay, составила около 60 долларов. Итак, 268 реле стали моим пределом для компьютерного дизайна. Очевидно, я не пытался копировать релейный компьютер Гарри Портерса, потому что он требовал более 400 реле, но я позаимствовал многие идеи из его конструкции, чтобы мне не пришлось изобретать велосипед.В выходные дни в школе релейный компьютер был разработан с ограничением в 268 реле (которое в конечном итоге увеличилось до 281 реле), 8-битной шиной данных, 16-битной шириной адреса и плавающим нулем. Более того, я создал свою собственную архитектуру набора инструкций (ISA), используя только 5-битные инструкции для простоты.
Кто-то может задаться вопросом: «Что за фигня плавающий ноль? Существует значительная разница между использованием заземленного нуля и плавающего нуля в релейной логике. Заземленный ноль означает, что ноль представлен подключением к заземлению источника питания.Это может упростить определенную логику, такую как XOR, для которого потребуется только одно реле. В моем первом релейном сумматоре использовался заземленный ноль. Однако заземленный ноль создает проблемы с другой логикой, такой как регистры памяти, из-за возможности короткого замыкания источника питания. Я обошел эту проблему в моем первом сумматоре реле с помощью резисторов. Плавающий ноль в основном означает, что нет соединения с землей источника питания, положительным источником или чем-то еще, отсюда и название «плавающий» ноль. Это очень полезно для предотвращения коротких замыканий при изменении состояния реле, особенно в регистрах.
Прежде чем перейти к деталям аппаратного обеспечения ЦП реле, аппаратное обеспечение основано на выбранной архитектуре набора команд (ISA). Моя ISA в основном классифицируется по четырем различным категориям: ветвление, перемещение данных, функция ALU и остановка, а точные инструкции и определения можно посмотреть здесь: Relay Computer Two ISA.
Архитектура ЦП реле показана ниже:
Три регистра и ALU
Первым шагом было создание трех регистров ЦП: A, B и C.Ниже представлена схема одного 8-битного релейного регистра:
Регистр работает на основе электрического защелкивания. Когда линия HOLD имеет высокий уровень, тогда, если катушка реле памяти активирована, переключатель замыкается и сохраняет катушку активированной. Когда линия HOLD выключена, то есть отсоединена от положительного источника питания, катушка не может оставаться под напряжением, и переключатель размыкается. Таким образом, для загрузки с шины данных, вход LOAD устанавливается на высокий уровень, и реле отключает линию HOLD от положительного источника, тем самым позволяя реле памяти очищаться, и подключает линию SELECT к положительному источнику для подключения шины данных к регистр.Реле памяти меняют состояния, чтобы соответствовать данным на шине, но они не фиксируют биты до тех пор, пока линия HOLD не перейдет в высокий уровень. Теоретически, когда линия LOAD становится низкой, линия HOLD возвращается в исходное состояние и биты сохраняются. Однако это не всегда так, потому что для переключения реле с SELECT на HOLD во время нагрузки есть крошечный промежуток времени, поэтому шина данных может быть отключена до того, как реле памяти смогут удерживать биты. Чтобы предотвратить это, конденсатор 10 мкФ помещается на линию SELECT, чтобы поддерживать его активность в миллисекундах дольше, чтобы у линии HOLD была возможность вернуться на высокий уровень, поэтому реле памяти сохраняют биты до отключения шины данных.Эта конструкция регистра также используется для регистров адреса памяти (MAR_HI и MAR_LO) и регистра инструкций (IR), за исключением того, что используются только 5 бит, а не 8.
После создания трех регистров ALU стал следующим шагом, потому что функции получают свои входные данные непосредственно из одного или двух регистров. Функции ALU включают в себя: A + B, A AND B, NOT A, SHIFT RIGHT A, SHIFT LEFT A, SHIFT LEFT B, INCREMENT A и LOAD CONSTANT (ADDab, ANDab, NOTa, SRa, SLa, SLb, INCa, LDconst соответственно являются мнемоникой функций ALU в ISA).Третий регистр, регистр C, является регистром назначения для всех функций ALU, чтобы упростить схему управления. Еще одна причина для установки C в качестве регистра назначения – избежать возможных ошибок. Одно большое различие между релейными регистрами и современными твердотельными регистрами заключается в том, что они в основном не меняют данные по мере удаления старых данных. Как только данные записываются в регистр реле, старые данные теряются до того, как действительно произойдет загрузка. Это создает серьезную проблему при записи результата арифметической функции обратно в один из исходных регистров.Например, функция NOTa производит результат на основе содержимого регистра A. Если результат записывается обратно в регистр A, то содержимое в A теряется, что приводит к изменению результата NOTa, что может вызвать нежелательные колебания. Чтобы обойти это, все функции ALU отправляются в регистр C, потому что он не является исходным регистром.
8-битный сумматор основан на конструкции Конрада Зусуса и весьма гениален. Однобитовый сумматор состоит из двух реле 4PDT (четырехполюсного двойного направления) с двумя входами переноса (один является инверсным по отношению к другому).Чтобы сделать простое сложение, Cin и Cin равны 0 и 1 соответственно. Чтобы увеличить регистр A, данные из регистра B отключаются от входа сумматора, поэтому он видит только регистр A. Затем Cin и Cin меняются на 1 и 0 соответственно, а выход представляет собой приращение A. Ниже приведена схема для 1-битного сумматора.
Каждый 1-битный сумматор каскадно соединен, как показано ниже, чтобы сформировать 8-битный сумматор и инкремент.
Когда INC активирован, реле DPDT (или два реле SPDT) в нижнем левом углу активирует реле, которые отключают регистр B от входа сумматора, поэтому он в основном добавляет регистр A с нулем.Более того, реле в нижнем левом углу будут передавать логическую 1 на Cin (вход переноса) сумматора, который автоматически превращает его в инкремент. В этот момент на выходе сумматора будет регистр A плюс один. С другой стороны, когда активирован ADD, он просто подключает выход суммы регистров A и B к шине данных.
Для 8-битного логического блока ALU, ANDab и NOTa используйте 16 однополюсных реле с двойным переключением в следующей конфигурации схемы. Обратите внимание, что показаны только первые четыре бита.
Обратите внимание, что И выводит логическую 1, только если оба входа равны 1, поэтому, например, пара реле для RA0 и RB0 должна быть активирована, чтобы логическая 1 переключилась на выход. NOTa выполняется просто с помощью нормально замкнутых (NC) контактов реле RA, поэтому, когда RA0 равен нулю, логическая 1 будет присутствовать на контакте NC.
Логика смены довольно проста. Ниже приведены схемы логики SRa, SLa и SLb.
Обратите внимание, что в цепи есть переключатели, а не реле, которые выбирают циклический или некруглый сдвиг.Для сдвига влево круговой означает, что входной MSB (старший значащий бит) перемещается в результат LSB (младший значащий бит), в то время как все остальные биты сдвигаются влево. Переключение на некруговой просто разрывает этот «цикл», и входной MSB просто сбрасывается, а в результат LSB загружается ноль (помните, что ноль перемещается). Для сдвига вправо младший бит входа перемещается в старший бит в результате для кругового режима. В некруглом режиме переключатель просто отключает входной младший бит от старшего разряда результата и соединяет старший бит результата с битом 7 на входе для расширения знака.Старший бит входных данных представляет знак числа, положительный или отрицательный, поэтому, если мы сдвинемся вправо, нам нужно оставить этот знак впереди, поэтому мы просто копируем его вместо результата MSB. Переключатели допускают небольшую аппаратную программируемость, потому что круговые или некруглые сдвиги имеют свои преимущества в определенных приложениях.
Последняя инструкция ALU – это LDconst, которая в основном загружает константу в регистр C. Эта инструкция используется для загрузки обычно используемой константы для программы, потому что инструкция занимает половину машинных циклов, необходимых для инструкции, используемой для загрузки из памяти.DIP-переключатели используются для выбора константы, но в большинстве случаев она установлена на -1 или xFF (дополнение на 2 с для -1). Ниже представлена схема этой схемы.
Регистры программного счетчика и адреса памяти
Можно задаться вопросом, почему 16-битная адресная шина для релейного компьютера работает с тактовой частотой, которая более чем в несколько тысяч раз медленнее, чем у большинства компьютеров в семидесятые годы? 16 бит означают 64 КБ памяти, а на большинстве персональных компьютеров в семидесятые годы не было даже 8 КБ памяти! Было бы разумнее ограничить ширину адреса 8 битами, чтобы соответствовать ширине шины данных, но это всего лишь 256 байт памяти.Это может показаться большим количеством для одной программы, но я планировал использовать NV-SRAM (энергонезависимую статическую RAM), чтобы я мог хранить программы и не вводить их в память когда-либо снова, поэтому 256 байт могут быть весьма ограничивающими. Расширение ширины адреса до 10 или 11 бит было бы лучше, но с абсолютной адресацией это немного не соответствует 8-битным данным, содержащим первые 8 бит абсолютного адреса и следующие 8 бит данных с первые несколько бит для верхних n битов абсолютного адреса.Итак, я решил, что я пройду все девять ярдов и использую вдвое большую ширину шины данных для ширины адреса, поэтому 16 бит для ширины.
Программный счетчик, или для краткости ПК, представляет собой 16-разрядный регистр, в котором хранится адрес расположения ЦП в памяти. Это место используется для извлечения инструкций или данных из памяти для выполнения. Когда ЦП выполняет текущую инструкцию, ПК обычно переходит к следующему местоположению, чтобы ЦП мог получить следующую инструкцию, когда он закончит выполнение текущей инструкции.16-битный инкремент используется для увеличения ПК, используя только 16 реле плюс несколько вспомогательных реле. Следующая схема представляет собой полусумматор (измененная форма полного сумматора, используемого в ALU, где второе реле отсутствует). Приращение достигается путем подачи 1 и 0 в Cin и Cin соответственно в первый полусумматор. Выход будет увеличенным входом.
Подключив ПК напрямую ко входам инкрементатора, можно загрузить выход инкрементатора в ПК для увеличения регистра.Однако с реле все не так просто, как кажется. Релейный регистр, как обсуждалось в разделе ALU, не действует как твердотельные регистры и не может просто загрузить новое значение, если его текущее содержимое используется для создания этого значения. Проще говоря, загрузка выходных данных инкрементатора в регистр ПК, в то время как его текущее содержимое подается в инкремент, приведет к замкнутому циклу, после чего инкремент начнет дико увеличивать себя и заставит реле гудеть. Эту проблему можно сравнить с использованием твердотельной защелки с выходом, подключенным к входу.Есть несколько вариантов решения этой проблемы.
Гарри Портер использовал второй регистр ПК для конфигурации триггера «главный-подчиненный», чтобы разорвать петлю между ПК и инкрементатором. Это будет объяснено в ближайшее время. Мне не понравилась идея использования второго регистра ПК, потому что он использует 21 реле (16 SPDT для хранения бит, четыре 4PDT для включения и один SPDT для управления включением / удержанием). Идея устранить второй регистр ПК заключалась в использовании конденсаторов для хранения битов текущего ПК для подачи на вход инкрементора.Затем ПК быстро отключается от входа инкрементора и загружает выход инкрементора до того, как конденсаторы потеряют свой заряд. Это очень похоже на то, как работает динамическая RAM. Ниже представлена схема 4-битного инкрементора ПК, работающего на основе этой идеи.
Как только инкремент ПК выходит за пределы 5 или 6 бит, он начинает давать сбой из-за гистерезиса реле. Гистерезис реле (то есть задержка) – это когда реле не выключаются сразу после отключения питания из-за намагничивания в катушке и других эффектов индуктивной отдачи.Обратите внимание, что линия HOLD была заменена на 4PDT для индивидуального переключения питания на каждое реле хранения битов, чтобы помочь преодолеть эффекты гистерезиса. Я заметил, что во время цикла быстрой загрузки некоторые реле обычно отключаются медленнее, чем другие. Предположим, что ПК собирался загрузить 0100, а существующий ПК – 0011, если два младших бита не выключаются так же быстро, как включается третий бит, тогда линия HOLD может быть подтянута и другие биты остаются включенными, в результате переход с 0011 на 0111.4PDT, который заменяет линию HOLD, предотвращает это. В целом, для схемы, подобной вышеупомянутой, все основано на точной синхронизации, гистерезис становится раздражающей проблемой, которую можно преодолеть только путем использования более длительного рабочего цикла. К сожалению, более длительный рабочий цикл означает, что конденсаторы должны быть больше, чтобы биты удерживались достаточно долго, прежде чем они будут потеряны. Таким образом, вся схема становится слишком медленной и ненадежной. Однако это довольно изящная схема для простого 4-битного двоичного счетчика.
Был использован второй регистр ПК (PCR), несмотря на дополнительные 21 реле, потому что он был более надежным.PCR2 постоянно поступает в инкремент. Чтобы увеличить PCR2, PCR1 загружает увеличенную PCR2, затем PCR2 может безопасно загружать PCR1 для увеличения, не закрывая цикл. Для этого должен быть мертвый зазор между загрузкой PCR1 и загрузкой PCR2, чтобы реле успокоились. Более того, я не хотел разрабатывать конечный автомат для управления нагрузкой двух PCR, поэтому я использовал три реле SPDT, чтобы объединить два сигнала нагрузки в один входной сигнал. В то время как гистерезис реле был нежелательным в предыдущей идее приращения ПК, использование реле для управления двумя сигналами нагрузки использует преимущество гистерезиса для обеспечения безопасного промежутка между загрузкой PCR1 и PCR2.Ниже представлена блок-схема ПК в моем релейном компьютере, который имеет все связанные компоненты для адресации.
Схема блока ПК показана ниже, и каждый блок полусумматора использует схему, показанную несколькими параграфами назад. Обратите внимание, что схема не показывает каждый отдельный компонент в блоке ПК, но точки подразумевают повторение одной и той же схемы и проводки для каждого соответствующего адреса и бита данных.
Обратите внимание, что при подаче питания реле переводят PCR2 в состояние нагрузки, а PCR1 – в состояние сохранения.Когда сигнал подается на S_PC, реле переключает питание, чтобы активировать реле нагрузки для PCR1. Однако из-за гистерезиса реле в момент, когда S_PC переходит в высокий уровень, PCR2 быстро запускает переход от загрузки к хранению, в то время как другие реле в конечном итоге активируют PCR1 в состоянии нагрузки. Наконец, когда S_PC становится низким, то же самое происходит в обратном порядке, и данные из PCR2 успешно перемещаются в PCR1. Я заметил, что если PCR1 находится в состоянии загрузки, а PCR2 в состоянии сохранения, это становится проблематичным, потому что PCR1 установит свои биты на выход инкрементатора, и если инструкция BRANCH верна, мультиплексор переключит вход PCR1 так быстро что он не может очистить себя перед изменением своих битов на содержимое MAR.Это часто приводило к объединению адресов PCR1 и MAR вместе. Тот факт, что PCR1 переходит от накопления к загрузке, фактически дает ему время для очистки перед загрузкой новых битов. Гистерезис реле может быть неприятным или полезным.
При отсутствии сигнала на BRANCH, PCR1 загрузит выходной сигнал инкрементора, который увеличивает содержимое PCR2. Если мы хотим выполнить ветвление, тогда BRANCH переходит в высокий уровень, и PCR1 загружает вывод двух регистров адреса памяти (MAR). Причина использования регистров адреса памяти заключается в том, что для абсолютной адресации требуется конкретный 16-битный адрес, а ширина шины данных составляет всего 8 бит.Таким образом, мы загружаем старшие 8 битов 16-битного адреса из шины данных (из памяти) в MAR HI-8, а затем младшие 8 бит адреса из шины данных в MAR LO-8. Для инструкции перехода BRANCH перейдет в высокий уровень, затем мы активируем S_PC, чтобы загрузить PCR2 с 16-битным адресом из двух MAR. Для инструкций LOAD или STORE мы не хотим изменять содержимое PCR, поэтому мы просто активируем L / S и извлекаем или сохраняем данные по адресу, хранящемуся в MAR. После этого L / S деактивируется, и память возвращается к адресу, хранящемуся в PCR2, для следующей инструкции.
Наконец, обратите внимание, что все соединения заземления для блока ПК, как показано на схеме выше, являются локальными и все подключаются к сигналу PCGND. Эти заземляющие соединения НЕ подключаются к общей земле всего релейного компьютера. Конечный автомат имеет реле, которое подключает или отключает PCGND от заземления источника питания, чтобы очистить PCR и MAR для команды HALT или ручного сброса. Таким образом, компьютер может снова запуститься с адреса x0000 в памяти при сбросе CPU после команды HALT.
Конечный автомат
Конечный автомат (FSM) управляет всеми аспектами процессора реле, как дирижер управляет оркестром. Во всех компьютерах конечный автомат состоит из двух частей: комбинационной логики и хранилища. В этом релейном компьютере есть секвенсор (компонент памяти), который в основном представляет собой линейный счетчик с 12 состояниями. Секвенсор увеличивает состояние при каждом изменении часов; другими словами, как нарастающий, так и спадающий фронт тактовых импульсов запускает секвенсор.Логика реле декодирует текущее состояние, созданное секвенсором, плюс инструкцию, хранящуюся в 5-битном регистре инструкций, для управления всеми подкомпонентами релейного ЦП, включая ALU и блок ПК.
Ниже приведена схема 12-позиционного секвенсора, используемого в моем релейном компьютере:
Схема была разработана Гарри Портером и довольно аккуратна, но я упростил схему сброса. Секвенсор генерирует разные тактовые импульсы, которые могут использоваться комбинационной логикой, как показано на временной диаграмме ниже:
Светодиоды подключены ко всем выделенным буквам (сигнальные соединения, т.е.е. A), чтобы отразить, в каком состоянии находится секвенсор. Когда RST переходит в высокий уровень, а затем в низкий, в то время как сигнал CLK низкий, светодиод для A ‘должен загореться. Если CLK высокий, а RST переходит в высокий, а затем в низкий уровень, секвенсор зависнет, поэтому его можно будет сбросить только в определенное время.
Регистр команд (IR) – это 5-битный регистр, в котором два старших бита используются в качестве кода операции, а следующие три бита – в качестве условий. IR загружает инструкцию с шины данных из RAM в первом состоянии, и все, что находится в младших трех битах шины данных, игнорируется.Он построен точно так же, как 8-битный регистр, используемый в ALU, за исключением того, что первые три бита (D0, D1 и D2) не учитываются. Входы двоичного декодера подключены к IR, то есть с RA3 по RA7 в 8-битной схеме ALU. На следующей схеме эти соединения помечены как IR3 – IR7, а не RA3 – RA7 для вашей информации.
Комбинационная логика была разработана так, чтобы быть действительно простой, чтобы одни и те же реле можно было повторно использовать для разных инструкций, таких как реле декодирования условий.Однако эта часть ЦП очень сложна, и ее сложно упростить из-за того, что релейные переключатели являются двунаправленными. Для твердотельных компонентов, таких как транзистор, сигнал на входе может активировать выход, но не наоборот. Это не относится к реле; переключатель может проводить ток в любом направлении, поэтому, если логика не разработана с осторожностью, ток может проходить через различные переключатели и соединения, вызывая неожиданное поведение ЦП. Гарри Портер называет эту проблему «задним ходом».«Тем не менее, после многих часов экспериментов и тестирования, я в конце концов отладил большую часть логики в автомате, чтобы предотвратить неожиданное поведение, и ниже представлена схема (в трех частях) релейной логики, которую я использовал:
Обратите внимание, что LD означает LOAD, то есть LD_A подключается к LOAD регистра A, а S означает Select, то есть S_C подключается к SELECT регистра C. Довольно сложно объяснить, как работает логика, но понять, как и почему она работает , временные диаграммы команд ниже могут быть очень полезны:
RAM
ОЗУ, которое я использовал, является твердотельным, так что да, я признаю, что это не 100% чистый твердотельный компьютер, но ЦП – это все реле.Есть много причин для использования твердотельной ОЗУ. Очевидная причина в том, что собрать оперативную память из реле, основной памяти или чего-то еще очень сложно. Представьте себе 256 байт ОЗУ реле, что составляет 2048 бит, не говоря уже об адресном декодере и всем остальном. Даже если бы можно было использовать одно реле на бит, 2048 бит для всего лишь 256 байт ОЗУ просто дорого. Ядро памяти было еще одним соображением, но многие компьютерщики считают их предметами коллекционирования и платят большие деньги, чтобы получить небольшую матрицу 16×16, чтобы поместить в довольно маленькую рамку.Затем есть идея купить за несколько долларов банку, полную ферритовых пончиков, и сделать свою собственную.
Итак, я изначально планировал использовать энергонезависимую SRAM Dallas DY1220 2 КБ, чтобы я мог хранить свои программы в памяти без необходимости перепрограммировать память каждый раз при выключении компьютера. Я планировал использовать SRAM 32 КБ, но 2 КБ казались удовлетворительными, а ЦП был рассчитан на 64 КБ, так что, по крайней мере, у него есть возможность расширения. У меня была другая идея упростить ЦП, расширив IR до 8-бит и используя последние три бита как часть адреса, но я уже построил большую часть ЦП, прежде чем я даже подумал об этом, но идеи будут объяснены позже ниже.
Задача состояла в том, чтобы разработать переключатель уровня для связи ОЗУ с ЦП реле. ОЗУ работает от 5 вольт, поэтому логическая 1 равна 5 В, а логический 0 – 0 В. ЦП реле использует 24 В для логической 1 и плавающее соединение для логической 0. Сдвигатель уровня заботится о различиях, как обмен денег на две валюты.
Я попытался сохранить детали, поэтому сдвиг уровня было немного сложно спроектировать. Преобразователь ЦП в ОЗУ был в основном параллелен преобразователю ОЗУ в ЦП. Один или другой был просто активен во время чтения или записи, но есть возможность замкнуть петлю между двумя преобразователями, что приведет к защелкиванию битов.После проекта номер 5 или около того я в конце концов купил несколько герконов на 5 В для преобразователя. Однако использование герконовых реле было огромной ошибкой, потому что эти реле очень чувствительны к магнитным полям вокруг них. Фактически, я подключил омметр к контактам герконового реле и запитал катушку. Непрерывность была, но когда я поднес небольшой слабый магнит примерно на полдюйма от реле, выключатель разомкнулся! После пары недель борьбы за экранирование язычковых реле листовым металлом и обеспечение их правильного переключения я сдался и купил НАСТОЯЩИЕ реле на 24 В в местном магазине электроники.Окончательный дизайн работал с этими реле, как показано ниже:
Блок ОЗУ фактически может состоять из нескольких микросхем ОЗУ меньшего размера или устройств ввода / вывода с отображением памяти. Я использовал 74HC138 и 74HC133 для отображения восьми возможных устройств ввода-вывода. Ниже представлена схема блока RAM:
Блок питания
Конечно, без блока питания ничего не работает. Ниже приведена схема стабилизированного источника питания 24 В постоянного тока с использованием минимального количества деталей и способного обеспечить питание до двух.5A, что примерно соответствует пиковому току, потребляемому релейным компьютером, в зависимости от тактовой частоты и содержимого всех регистров одновременно. 24 В при максимальном токе 2,5 А – это примерно 60 Вт пиковой мощности, а в среднем релейный ЦП потребляет около 40 Вт.
Вот и все! Количество реле и стоимость ниже:
СЧЕТЧИК РЕЛЕ
Извлеченные уроки Ниже приведены несколько советов, которые помогут вам не повторять мои ошибки, если вы решите быть достаточно сумасшедшим, чтобы построить компьютер-реле.
Ниже показаны изображения ЦП реле. Первая серия эскизов (щелкните, чтобы увеличить изображение) показывает каждую секцию компьютера и проводку, вид снизу.Готовые компьютерные фотографии можно найти в конце этой страницы. Наслаждаться!
Весь компьютер по состоянию на 08.06.07
На видео показано, как ЦП запускает программу, показанную ниже: Программа предполагает, что регистр A уже очищен, что происходит во время включения питания. На видео показано, как ЦП выполняет программу, показанную ниже: ОЗУ объемом 32 КБ активно только с x0000 до x7FFF, поэтому, когда ЦП переходит на xFFFC, по шине данных ничего не возвращается. Это «ничего» или x00 интерпретируется ЦП как NOP (отсутствие операции), поэтому он просто увеличивает счетчик программ до тех пор, пока не появится инструкция. Однако, когда xFFFC увеличивается до xFFFD, xFFFE, xFFFF, 16-битный инкрементатор переполняется, и ПК возвращается к x0000.Вуаля, ЦП вернулся к инструкции ветвления, которая отправила его в xFFFC. Похоже на самую бесполезную программу, ветвь, возвращающуюся в саму себя. Однако тот факт, что ПК переходит с нижнего уровня памяти на верхний, вызывает усиление щелчков. Кроме того, когда ПК загружает много битов, то есть xFFFC, тогда потребление тока резко возрастает. Кроме того, тактовая частота компьютера постепенно увеличивается с примерно 6 машинных циклов в секунду в начале видео до примерно 30 машинных циклов в секунду ближе к концу видео.После 30 машинных циклов в секунду ЦП реле начнет терять биты и выйдет из строя. Прошу прощения за небольшое несоответствие звука щелчка и клипов, потому что они были записаны отдельно. Это видео показывает мою раннюю и неудачную попытку отправить символы на VFD (вакуумный флуоресцентный дисплей) с помощью процессора реле. Предполагалось, что VFD будет исходным устройством вывода, а не светодиодами на релейном компьютере. Проблемы возникли из-за дребезга переключателя, из-за которого символы отправлялись несколько раз, а на дисплее случайным образом появлялся мусор.Wcomputer | Детали Вычислительный блок в порядке, но я даже не затронул аспекты памяти. Я оставлю память команд на потом, так как мне понадобится совсем немного. Я сосредотачиваюсь на ОЗУ данных (требуется меньше памяти), и есть 2 порта памяти. Я решил использовать единые адресные пробелы, потому что это экономит реле. Сначала я не хотел заниматься мультиплексированием, но количество реле, необходимых для декодирования адресов, является значительным … Я буду использовать 16-битные слова и посмотрю, как сделать масштабируемую систему, где я могу добавить больше бит, не меняя Все это.Надеюсь, я смогу достичь нескольких кбит (одна или двести слов). Давайте посмотрим на решетку конденсатор-диод (уже разработанную для компьютера TIM-8). С веб-сайта: Использование одного реле на бит было бы невероятно шумным, энергоемким, дорогим и большим … OTOH Я должен спланировать цикл простоя, который будет читать (и обновлять) каждое слово. 1N4148s почти ничего не стоят, и я могу найти довольно дешевые конденсаторы. Вдобавок ко всему, поскольку я охарактеризовал реле, я знаю параметры срабатывания и требуемый ток для переключения состояния в состоянии предварительного смещения. На странице TIM не указывается емкость массива, но я полагаю, что она где-то около 100 мкФ. Конденсатор должен обеспечивать достаточный заряд, чтобы включить сенсорное реле, и это около 3,3 В и 25 мА или что-то в этом роде (как долго?). Я думаю о способе увеличения «пика», используя более высокие напряжения, поэтому я смотрю на конденсаторы на 25 В, и это нормально, если я использую 20 В для сигналов управления с большим разветвлением. Однако конденсаторы на 16 В дешевле … Конечно, все эти предположения должны быть проверены / проверены, а схемы распознавания и обновления TIM не объясняются, поэтому мне придется их выяснить.Обновление: да, неплохо было проверить цепь датчика. Конденсаторы на 25 В не нужны, 3,3 В работает нормально. Да, и мне, наверное, стоит подумать о добавлении защиты по четности в ОЗУ. Обновление: это более сложно, чем это … Диоды были удалены (это также экономит слой реле), тип конденсатора уточняется … См. Следующие журналы.
Аппаратное обеспечение – Самый маленький / самый простой, современный компьютер с чистым реле с как минимум 4-битными словами данныхЯ только что нашел это обсуждение и хотел исправить несколько ошибок Жюля в одном из моих проектов, YGREC8 (я – YG из YGREC). Есть много релейных проектов, посмотрите https: // hackaday.io / project / 11798-relay-based-projects (но не исчерпывающе). В каждом проекте используются реле особым образом, и, безусловно, лучший выбор – это реле DPDT (2 контакта катушки и 6 контактов сигнала / переключателя). YGREC8 использует SPDT, и у него есть свои проблемы, но он все же лучше, чем SPST! (некоторые заблудшие души на Hackaday пытаются и вынуждены использовать диоды). Больше полюсов, больше гибкости и креативного дизайна! Я экспериментировал с «CC-PBRL»: логика емкостно-связанных реле с предварительным смещением: там нет диода 🙂 Фактически, реле SPDT действует как мультиплексор, что является одной из самых мощных простых логических функций, и это может имитировать многие другие функции.Это основа ПЛИС серии Actel A1xxx, в которой LUT не использовался: все функции реализованы с помощью MUX 🙂 До сих пор я использовал диоды (старый русский точечный германиевый стиль) только для декодирующих массивов 7-сегментных шестнадцатеричных модулей отображения. В остальном YGREC8 почти не должно использоваться диодов, хотя они необходимы для определенных цепей памяти (данных и программы). По моему опыту, диоды спасают жизнь, и они были открыты в конце 18 века 🙂 YGREC8 не является конвейерным, хотя в конечном итоге он может быть реализован с 4-фазным тактовым сигналом (что требует наличия буферов на 4 этапах в канале данных).Он отлично работал бы с одним тактовым циклом на инструкцию на ПЛИС (другая цель). В счетчике реле преобладает набор регистров: 64 бита данных для хранения с гистерезисной фиксацией (1 реле на бит) и 1 реле на порт (1 запись и 2 чтения). Это примерно 256 реле для всего набора регистров, хотя это более тонко (память отображается с отображением регистров). Инструкции просты для декодирования (там нет диода! Только несколько И для обнаружения угловых случаев), а исполнительные блоки являются базовыми, поэтому общее количество будет около 700 реле, столько же, сколько количество гейтов первых тестов FPGA.Для ввода-вывода потребуется больше, и я планирую хорошо оснащенную систему отладки. Релемедленные и энергоемкие, но очень забавные в использовании и проектировании, они заставляют думать «нестандартно» 😀 Однако я сомневаюсь, что 4-битная архитектура будет куда угодно, я обнаружил, что 8 – это самый лучший вариант. первая золотая середина. Ранние «миникомпьютеры», такие как CDC160, использовали данные шириной 6 и 12 бит, но это могло быть не очень удобно … nbloqs: Надеюсь, вы поделитесь своим дизайном, и я буду рад добавить вашу ссылку в список, который я упомянул в начале 🙂 YG / уайджи Engineering Essentials: что такое программируемый логический контроллер?Программируемый логический контроллер (ПЛК) – это промышленный твердотельный компьютер, который контролирует входы и выходы и принимает решения на основе логики для автоматизированных процессов или машин. % {[data-embed-type = “image” data-embed-id = “5df2771bf6d5f267ee2817ad” data-embed-element = “aside” data-embed-align = “left» data-embed-alt = “Machinedesign Com Sites Machinedesign com Загрузка файлов 2015 04 Стойка для Plc Allen Bradley “data-embed-src =” https://base.imgix.net/files/base/ebm/machinedesign/image/2015/06/machinedesign_com_sites_machinedesign.com_files_uploads_2015_04_Allen_Backloads_2015_04_Allen_B = max & w = 1440 “data-embed-caption =” “]}% 1. На изображении выше изображена стойка ПЛК Allen-Bradley, типичный пример настройки ПЛК, которая включает в себя ЦП, аналоговые входы, аналоговые выходы и выходы постоянного тока.ПЛКбыли представлены в конце 1960-х изобретателем Ричардом Морли для обеспечения тех же функций, что и системы релейной логики. Релейные системы в то время имели тенденцию выходить из строя и создавать задержки. Затем техническим специалистам пришлось отыскать целую стену реле, чтобы устранить проблему. ПЛКнадежны и могут выдерживать суровые условия, включая сильную жару, холод, пыль и экстремальную влажность. Их язык программирования легко понять, поэтому их можно программировать без особого труда. ПЛК имеют модульную структуру, поэтому их можно подключать к различным установкам.Переключение реле под нагрузкой может вызвать нежелательное искрение между контактами. Возникновение дуги вызывает высокие температуры, которые приводят к свариванию контактов и вызывают деградацию контактов в реле, что приводит к выходу устройства из строя. Замена реле на ПЛК помогает предотвратить перегрев контактов. У ПЛКесть недостатки. Они плохо справляются с обработкой сложных данных. При работе с данными, требующими C ++ или Visual Basic, предпочтительными контроллерами являются компьютеры. ПЛК также не могут хорошо отображать данные, поэтому часто требуются внешние мониторы. Компоненты оборудования ПЛК Центральный процессор (ЦП) служит мозгом ПЛК. Это 16- или 32-битный микропроцессор, состоящий из микросхемы памяти и интегральных схем для управления, контроля и связи. ЦП предписывает ПЛК выполнять команды управления, связываться с другими устройствами, выполнять логические и арифметические операции и выполнять внутреннюю диагностику. ЦП выполняет подпрограммы памяти, постоянно проверяя ПЛК (контроллер ПЛК является избыточным), чтобы избежать ошибок программирования и убедиться, что память не повреждена. % {[data-embed-type = “image” data-embed-id = “5df2771bf6d5f267ee2817af” data-embed-element = “aside” data-embed-align = “left» data-embed-alt = “Machinedesign Com Sites Machinedesign com Загрузка файлов, 2015 г. 04 Обзор системы Plc “data-embed-src =” https://base.imgix.net/files/base/ebm/machinedesign/image/2015/06/machinedesign_com_sites_machinedesign.com_files_uploads_2015_04_PLC_Sngystem_Overview=plic max & w = 1440 “data-embed-caption =” “]}% 2. ПЛК работают с входами, выходами, источником питания и внешними устройствами программирования.Память обеспечивает постоянное хранение операционной системе данных, используемых ЦП. В постоянной памяти (ПЗУ) системы постоянно хранятся данные для оперативной памяти (ОЗУ) операционной системы, в которой хранится информация о состоянии устройств ввода и вывода, а также значения для таймеров, счетчиков и внутренних устройств. ПЛК требует устройства программирования, будь то компьютер или консоль, для загрузки данных в ЦП. % {[data-embed-type = “image” data-embed-id = “5df2771bf6d5f267ee2817b1” data-embed-element = “aside” data-embed-align = “left» data-embed-alt = “Machinedesign Com Sites Machinedesign com Загрузка файлов 2015 04 Рабочий цикл ЦП “data-embed-src =” https: // base.imgix.net/files/base/ebm/machinedesign/image/2015/06/machinedesign_com_sites_machinedesign.com_files_uploads_2015_04_CPU_Operating_Cycle.png?auto=format&fit=max&w=1440 “рабочий цикл включает в себя% data-embed. следующие шаги: а) начать сканирование; б) внутренние проверки; в) сканировать входы; г) выполнить логику программы; и д) обновить выходы. Программа повторяется с обновленными выходами. ПЛКсчитывают сигналы с различных датчиков и устройств ввода. Этими устройствами ввода могут быть клавиатуры, переключатели или датчики.Входы могут быть в цифровой или аналоговой форме. Роботы и визуальные системы – это интеллектуальные устройства, которые могут отправлять сигналы на модули ввода ПЛК. Выходные устройства, такие как двигатели и электромагнитные клапаны, дополняют автоматизированную систему. % {[data-embed-type = “image” data-embed-id = “5df2771bf6d5f267ee2817b3” data-embed-element = “aside” data-embed-align = “left» data-embed-alt = “Machinedesign Com Sites Machinedesign com Загрузка файлов 2015 04 Устройства вывода поля 0 “data-embed-src =” https://base.imgix.net/files/base/ebm/machinedesign/image/2015/06/machinedesign_com_sites_machinedesign.com_files_uploads_2015_04_Output_Field_Devices_0.png? auto = format & fit = max & w = 1440 “data-embed-caption =” “]}% 4. На верхнем изображении показаны общие входы в ПЛК, включая кнопки и переключатели. Выходные соединения показаны на нижнем изображении. включить выход сигнала (SOL), контрольную лампу (PL) и зажигание двигателя (MI).% {[data-embed-type = “image” data-embed-id = “5df2771bf6d5f267ee2817b5” data-embed-element = “в сторону “data-embed-align =” left “data-embed-alt =” Machinedesign Com Sites Загрузки файлов Machinedesign com 2015 04 Устройства ввода полей “data-embed-src =” https: // base.imgix.net/files/base/ebm/machinedesign/image/2015/06/machinedesign_com_sites_machinedesign.com_files_uploads_2015_04_Input_Field_Devices.png?auto=format&fit=max&w=1440 “Sourcing: два важных условия и заголовок – это два важных условия, а также заголовок – это два важных условия. при обсуждении входных и выходных соединений ПЛК. Потребление – это общая линия заземления (-), а источник – это общая линия VCC (+). VCC – это точка подключения положительного напряжения питания. Входы потребителя и источника проводят электричество только в одном направлении.Каждый вход имеет свою собственную линию возврата, и несколько входов подключаются к одной линии возврата вместо нескольких отдельных линий возврата. Эти общие линии помечены как «COMM». Выходы датчиков обозначают размер подаваемого сигнала. Модули ввода постоянного тока подключаются к устройствам транзисторного типа с источниками или потребителями. Модули ввода переменного тока (переменного тока) встречаются реже, чем входы постоянного тока, потому что большинство датчиков имеют транзисторные выходы, поэтому, если система использует вход датчика, он, скорее всего, будет постоянным; Входы переменного тока требуют больше времени для просмотра ПЛК по сравнению с входами постоянного тока.Типичный вход переменного тока – это механический переключатель, используемый для медленных механических приводов. Реле – одно из наиболее распространенных выходных соединений. Реле может переключать модули переменного или постоянного тока, потому что они неполяризованы. Реле работает медленно, переключается и устанавливается со скоростью от 5 до 50 миллисекунд (мс), но может переключать большой ток. Например, для низковольтной батареи можно использовать реле для переключения главной цепи переменного тока 230 В. Транзисторные соединения быстрее реле и имеют долгий срок службы. Транзисторы переключают небольшой ток, но работают только с постоянным током.Пример мощного транзистора имеет ток 15 ампер при максимальном напряжении 60 В. Подключения симисторного выхода (триода для переменного тока) управляют только нагрузками переменного тока. Подобно транзистору, симистор быстрее и выдерживает большие нагрузки переменного тока. Например, симисторный выход может выдерживать напряжения от 500 до 800 при токе 12 ампер. Язык программирования ПЛК В ПЛК используются пять языков программирования. Они определены международным стандартом IEC 61131. Релейная логика – один из наиболее часто используемых языков ПЛК.В нем символы представляют реле включения и выключения, счетчики, таймеры, регистры сдвига и математические операции. Символы выстраиваются в желаемую программу. Правила в релейной логике называются «ступенями». Каждая ступень имеет один выход, но один вход может быть найден более чем в одной ступени. % {[data-embed-type = “image” data-embed-id = “5df2771bf6d5f267ee2817b7” data-embed-element = “aside” data-embed-align = “left» data-embed-alt = “Machinedesign Com Sites Machinedesign com Загрузка файлов 2015 04 Релейная логика “data-embed-src =” https: // base.imgix.net/files/base/ebm/machinedesign/image/2015/06/machinedesign_com_sites_machinedesign.com_files_uploads_2015_04_Ladder_Logic.png?auto=format&fit=max&w=1440 “data-embed]-caption 5. ПЛК либо в горизонтальном формате, показанном здесь (слева направо, начиная с верхнего левого угла и переходя к следующей строке), либо в вертикальном формате (столбец за столбцом, начиная с верхнего левого угла). | | – это переключатели, а () – команда действияДругой язык программирования – это функциональная блок-схема (FBD).Он описывает функции между входными и выходными переменными. Функция, представленная блоками, связывает входные и выходные переменные. FBD полезен для изображения алгоритмов и логики взаимосвязанных систем управления. Структурированный текст (ST) – это язык высокого уровня, в котором используются команды предложений. В ST программисты могут использовать операторы «if / then / else», «SQRT» или «repeat / until» для создания программ. Список инструкций (IL) – это низкоуровневый язык с функциями и переменными, определяемыми простым списком.Управление программой осуществляется инструкциями перехода и подпрограммами с дополнительными параметрами .Язык последовательной функциональной диаграммы (SFC) – это метод программирования сложных систем управления. Он использует базовые строительные блоки, которые запускают свои собственные подпрограммы. Программные файлы написаны на других языках программирования. SFC делит большие и сложные задачи программирования на более мелкие и более управляемые. % {[data-embed-type = “image” data-embed-id = “5df2771bf6d5f267ee2817b9” data-embed-element = “aside” data-embed-align = “left» data-embed-alt = “Machinedesign Com Sites Machinedesign com Загрузка файлов 2015 04 Функциональный блок “data-embed-src =” https: // base.imgix.net/files/base/ebm/machinedesign/image/2015/06/machinedesign_com_sites_machinedesign.com_files_uploads_2015_04_Function_Block.png?auto=format&fit=max&w=1440 “data-embed-caption% use. блоки для представления функций и получения входных данных из строк, входящих слева. Линии, выходящие вправо, представляют выходные результаты.Связь с ПЛК RS-232 – наиболее распространенный метод, используемый ПЛК для связи с внешними устройствами.Это стандарт последовательной связи, который использует двоичный код для передачи данных в формате Американского стандартного кода обмена информацией (ASCII). ASCII переводит буквы и цифры в двоичный код, который могут читать компьютеры. ASCII – это 7-битный код (бит равен «1» или «0»), который при преобразовании дает 128 символов. Последовательные порты ПЛК передают и принимают данные в виде напряжения. ПЛК могут быть либо оконечным оборудованием данных (DTE), либо оборудованием передачи данных (DCE). DTE, например, может быть компьютером, а модем – DCE.Обычно ПЛК – это DTE, а внешние устройства – это DCE. Когда ПЛК и подключенное к нему внешнее устройство являются одним и тем же оборудованием (, т.е. , DTE / DTE или DCE / DCE), они не могут взаимодействовать друг с другом, и необходимо использовать нуль-модемное соединение. % {[data-embed-type = “image” data-embed-id = “5df2771bf6d5f267ee2817bb” data-embed-element = “aside” data-embed-align = “left” data-embed-alt = »Com Sites Machinedesign Machinedesign com Загрузка файлов 2015 04 Таблица функций последовательного порта “data-embed-src =” https: // base.imgix.net/files/base/ebm/machinedesign/image/2015/06/machinedesign_com_sites_machinedesign.com_files_uploads_2015_04_serial_port_functions_table.png?auto=format&fit=max&w=1440 “data-embed]-} При последовательной связи данные передаются по одному биту за раз. Данные разделяются на составляющие биты для передачи и повторно собираются при получении внешним устройством. «Стартовый бит» – это отправляемый начальный сигнал, который предшествует любым другим битам связи. Считается «космическим» или отрицательным напряжением.«Стоповый бит», последний отправленный код, считается «меткой» или положительным напряжением. Восемь бит составляют байт, а ПЛК ориентированы на байты. ASCII – это семибитный код, поэтому восьмой (или «байт четности») проверяет, не были ли данные повреждены. Общие формы контроля четности включают четный (1) или нечетный (0). Суммарное количество единиц в байте дает четное или нечетное число. Передающее оборудование определяет, является ли обмен данными четным или нечетным, а принимающее оборудование сравнивает результат проверки четности с восьмым битом, чтобы убедиться, что они совпадают.Если устройство передает 1001101 и вычисляет его как нечетное значение, оно прибавляет 1 к восьмому биту и отправляет 10011011. Получатель решает, что бит нечетный, и проверяет нечетное всего 1 символ. Скорость передачи – это количество битов в секунду, передаваемых от DTE к DCE. Передача RS232 будет отображаться как скорость передачи, биты данных и биты остановки четности. Например, строка 9600-8-1-1 преобразуется в скорость 9600 бод, 8 бит данных, 1 для проверки на четность и 1 стоповый бит для завершения передачи. Программное подтверждение связи обеспечивает готовность устройств к отправке и получению данных. Получатель отправляет символ XOFF, когда он хочет, чтобы передатчик приостановил отправку данных. Он отправляет символ XON, когда снова готов к приему данных. XOFF иногда называют удерживающим символом, а XON – символом освобождения. В конце сообщений добавляется разделитель, чтобы сообщить получателям, что нужно обрабатывать только что полученные данные. Самый распространенный разделитель – это «возврат каретки» (CR).ПЛК или внешнее устройство получает разделитель и берет данные из своего буфера. В буфере временно хранятся данные до их обработки. Перевод строки (LF) иногда отправляется с символом CR. При просмотре на компьютере страница перемещается на строку вниз, чтобы начать новую линию связи. Критерии выбора ПЛК % {[data-embed-type = “image” data-embed-id = “5df2771bf6d5f267ee2817bd” data-embed-element = “aside” data-embed-align = “left» data-embed-alt = “Machinedesign Com Sites Machinedesign com Загрузка файлов 2015 04 Пример Pl Cs “data-embed-src =” https: // base.imgix.net/files/base/ebm/machinedesign/image/2015/06/machinedesign_com_sites_machinedesign.com_files_uploads_2015_04_Example_PLCs.png?auto=format&fit=max&w=1440 «data-embed-caption 7. зависят от потребностей и размера системы автоматизации.Выше приведены примеры различных ПЛК с различными входами, выходами и вариантами отображения.При выборе ПЛК следует учитывать несколько требований. Предлагаемая система новая или уже существующая? В любом случае убедитесь, что контроллер работает с сопряженным оборудованием. Условия окружающей среды влияют на производительность ПЛК. Типичные контроллеры работают при температуре от 0 до 55 ° C (32 ° -130 ° F). Количество дискретных устройств (логические устройства включения / выключения) и аналоговых устройств определяет количество подключений ввода / вывода, которые потребуются ПЛК. Если дискретные устройства переменного или постоянного тока, определите, может ли ПЛК поддерживать требуемый сигнал. Определение требований к ЦП важно для расчета объема ОЗУ, необходимого для обработки и хранения данных. Счетчики и таймеры используют оперативную память для хранения заданных значений, текущих значений и других внутренних флагов.Если данные должны храниться в течение длительного периода времени, память ЦП должна иметь соответствующий размер. Программная память или ПЗУ хранят программные инструкции. Аналоговым устройствам обычно требуется 25 слов памяти на одно устройство. Примерами аналоговых устройств являются измерители или датчики напряжения, тока и температуры. Простым и последовательным приложениям обычно требуется пять слов памяти на каждое устройство ввода-вывода. Сложные приложения не так предсказуемы и требуют больше памяти для программ. Оборудование ввода-вывода на основе последовательного и Ethernet-соединения является типичным выбором для удаленных подключений.Удаленные устройства необходимы, когда ПЛК расположен отдельно. Последовательные соединения имеют максимальное расстояние 50 футов, в то время как соединения Ethernet могут достигать 328 футов. Эти удаленные устройства называются распределенным вводом-выводом. Наконец, убедитесь, что ПЛК понимает инструкции программы. Некоторые ПЛК поставляются с функциями пропорциональной интегральной производной, которые устраняют необходимость для технических специалистов писать специальный код для управления процессом с обратной связью. Программируемый логический контроллер– обзорКоммуникационная шина ModiconПрограммируемый логический контроллер появился еще в 1968 году, когда компания General Motors решила найти новую технологию для замены своей жестко смонтированной электромеханической релейной системы электронным устройством.Первый ПЛК был разработан Bedford Associates и получил обозначение 084 (представляет восемьдесят четвертый проект Бедфорда) и выпущен под названием Modicon или MOdular DIgital CONtroller. 2 Протокол Modbus был разработан в 1979 году для обеспечения связи контроллеров процессов с компьютерами в реальном времени (например, MODCOMP FLIC, DEC PDP-11) и остается одним из самых популярных протоколов, используемых в архитектурах АСУ ТП. Modbus получил широкое распространение в качестве стандарта де-факто и с годами был расширен до нескольких различных вариантов. Modbus успешен благодаря его относительной простоте использования за счет передачи необработанных сообщений без ограничений аутентификации или чрезмерных накладных расходов. Это также открытый стандарт, он свободно распространяется и широко поддерживается членами организации Modbus, которая действует до сих пор. НазначениеModbus – это протокол обмена сообщениями прикладного уровня, что означает, что он работает на уровне 7 модели OSI. Это обеспечивает эффективную связь между взаимосвязанными активами на основе методологии «запрос / ответ».Чрезвычайно простые устройства, такие как датчики или двигатели, используют Modbus для связи с более сложными компьютерами, которые могут считывать измерения и выполнять анализ и управление. Для поддержки протокола связи на простом устройстве требуется, чтобы создание, передача и получение сообщения требовали очень небольших накладных расходов на обработку. Это же качество также делает Modbus пригодным для использования ПЛК и удаленными оконечными устройствами (RTU) для передачи контрольных данных в систему ICS. Поскольку Modbus является протоколом уровня 7, он работает независимо от основных сетевых протоколов, находящихся на уровне 3, что позволяет легко адаптировать его как к последовательной, так и к маршрутизируемой сетевой архитектуре.Это показано на рисунке 6.1. 3 Рисунок 6.1. Согласование Modbus с 7-уровневой моделью OSI. Как это работаетModbus – это протокол запроса / ответа, использующий три отдельных блока данных протокола (PDU): запрос Modbus, ответ Modbus и ответ исключения Modbus, как показано на рисунках 6.2 и 6.3. 4 Рисунок 6.2. Общий фрейм Modbus. Рисунок 6.3. Транзакция по протоколу Modbus (без ошибок). Modbus может быть реализован на физическом уровне RS-232C (точка-точка) или RS-485 (многоточечный).На одном последовательном канале RS-485 может быть реализовано до 32 устройств, при этом каждому устройству, взаимодействующему через Modbus, должен быть назначен уникальный адрес. Команда адресована определенному адресу Modbus, и хотя другие устройства могут получать сообщение, только адресуемое устройство ответит. Реализации, использующие RS-232C, были относительно просты для ввода в эксплуатацию; однако из-за множества вариантов реализации RS-485 (двухпроводная, четырехпроводная, заземление и т. д.) иногда было очень сложно ввести в эксплуатацию многоточечную топологию при использовании устройств от многих различных поставщиков. «Транзакция» начинается с передачи исходного кода функции и запроса данных в PDU запроса. Принимающее устройство отвечает одним из двух способов. Если ошибок нет, он ответит кодом функции и ответом данных в PDU ответа. Если есть ошибки, устройство ответит кодом функции исключения и кодом исключения в ответе на исключение Modbus. Данные представлены в Modbus с использованием четырех основных таблиц, как показано в таблице 6.1. Метод обработки каждой из этих таблиц зависит от устройства, так как некоторые могут предлагать одну таблицу данных для всех типов, а другие предлагают уникальные таблицы. Чтобы понять модель данных устройства, необходимо внимательно изучить документацию к устройству, поскольку исходные определения Modbus предусматривали только адреса в диапазоне 0–9999. С тех пор спецификация была добавлена, чтобы разрешить до 65 536 адресов во всех четырех таблицах данных. Еще одно предостережение в рамках стандарта заключается в том, что исходное определение предусматривало первую цифру регистра для идентификации таблицы данных. Таблица 6.1. Таблицы данных Modbus
Коды функций, используемые в Modbus, делятся на три категории и обеспечивают Поставщик устройства с некоторой гибкостью в реализации протокола в устройстве.Коды функций в диапазоне 01–64, 73–99 и 111–127 определены как «общедоступные», утверждены сообществом Modbus-IDA и гарантированно уникальны. Этот диапазон реализован не полностью, что позволяет определять коды в будущем. Коды «определяемых пользователем» функций в диапазоне 65–72 и 100–110 предназначены для того, чтобы позволить конкретному поставщику реализовать функциональные возможности в соответствии с их конкретным устройством и приложением. Уникальность этих кодов не гарантируется, и они не поддерживаются стандартом. Последняя категория кодов представляет «Зарезервированные» функции, которые используются некоторыми компаниями для устаревших продуктов, но не доступны для общего пользования.Эти зарезервированные коды включают в себя 8, 9, 10, 13, 14, 41, 42, 90, 91, 125, 126 и 127. Функциональные кодыи запросы данных могут использоваться для выполнения широкого диапазона команд. Вот некоторые примеры команд Modbus:
ВариантыПопулярность Modbus привела к разработке нескольких вариантов для удовлетворения конкретных потребностей. К ним относятся Modbus RTU и Modbus ASCII , которые поддерживают двоичную и ASCII-передачу по последовательным шинам соответственно. Modbus TCP – это вариант Modbus, разработанный для работы в современных сетях с использованием IP. Modbus Plus – это вариант, разработанный для расширения досягаемости Modbus через соединенные шины с использованием методов передачи токенов. 5 Modbus RTU и modbus ASCIIЭти похожие варианты Modbus используются в асинхронной последовательной связи, и они являются простейшими из вариантов, основанных на исходной спецификации. Modbus RTU (рисунок 6.4) использует двоичное представление данных, тогда как Modbus ASCII (рисунок 6.5) использует символы ASCII для представления данных при передаче по последовательному каналу. Modbus RTU является более распространенной версией и обеспечивает очень компактный фрейм по сравнению с Modbus ASCII. Modbus ASCII представляет данные как шестнадцатеричное значение, закодированное как ASCII, с двумя символами, необходимыми для каждого байта данных (ASCII PDU в два раза больше размера RTU PDU).Каждый из них использует простой формат сообщения, передаваемый в ADU (см. Рисунок 6.2), состоящий из адреса, кода функции, полезной нагрузки данных и контрольной суммы, чтобы гарантировать, что сообщение было получено правильно. Рисунок 6.4. Фрейм Modbus (Modbus RTU). Рисунок 6.5. Фрейм Modbus (Modbus ASCII). Modbus TCPModbus также может передаваться через Ethernet с использованием TCP в двух формах. Базовая форма принимает исходный ADU Modbus RTU (как показано на рисунке 6.4) и применяет заголовок протокола приложения Modbus (MBAP) для создания нового кадра (рисунок 6.6), который передается через оставшиеся уровни коммуникационного стека с добавлением соответствующих заголовков (рисунок 6.7) перед размещением в сети Ethernet. Этот новый фрейм включает всю исходную информацию о проверке ошибок и адресации. Эта форма протокола очень распространена со старыми устаревшими устройствами, которые содержат последовательный интерфейс Modbus RTU и подключены к «серверу устройств», который помещает эту информацию в промышленную сеть и получает ее аналогичным «сервером устройств», преобразуя ее обратно. в серийную форму RTU. Рисунок 6.6. Фрейм Modbus (Modbus через TCP / IP). Рисунок 6.7. Modbus ADU с дополнительными заголовками. Modbus TCP является более распространенной формой и использует TCP в качестве транспорта по IP для выдачи команд и сообщений по современным маршрутизируемым сетям. Modbus / TCP удаляет устаревший адрес и проверку ошибок и помещает только PDU Modbus вместе с заголовком MBAP в новый фрейм (см. Рисунок 6.8). «Идентификатор устройства» действует как адрес нового сетевого устройства и является частью заголовка MBAP.Проверка ошибок выполняется как часть составного кадра Ethernet. Рисунок 6.8. Фрейм Modbus (Modbus / TCP). Modbus plus или modbus +Modbus Plus на самом деле не вариант базового протокола Modbus, а другой, который использует механизмы передачи токенов для отправки встроенных сообщений Modbus по каналу последовательной связи RS-485 со скоростью передачи до 1 Мбит / с. с использованием одинарной (без резервирования) и двухкабельной (резервированной) топологии. Сеть поддерживает возможность широковещательной передачи данных всем узлам и позволяет добавлять «мосты» к сети, создавая сегментированные сети Modbus, каждая из которых может содержать до 64 адресуемых узлов.Это позволяет создавать очень большие сети Modbus. Modbus + остается собственным протоколом Schneider-Electric. 6 Где он используетсяModbus обычно развертывается между ПЛК (подчиненный) и HMI (главный) или между главным ПЛК и несколькими подчиненными устройствами, такими как ПЛК, приводы и датчики, как показано на рисунке 6.9 . Устройства Modbus могут действовать как «ведущие» для одних и в то же время как «ведомые» для других устройств. Эта функция является общей для главного терминала (MTU), который опрашивает данные в качестве главного из нескольких подчиненных ПЛК и интеллектуальных электронных устройств (IED), одновременно поддерживая запросы данных в качестве подчиненного устройства для других главных устройств, таких как серверы ICS и HMI. Рисунок 6.9. Типичное использование Modbus в архитектуре промышленной сети. Проблемы безопасностиModbus представляет собой несколько проблем безопасности:
Рекомендации по безопасностиModbus, как и многие промышленные протоколы управления, следует использовать только для связи между наборами известных устройств с использованием ожидаемых функциональных кодов. Таким образом, его можно легко отслеживать, устанавливая четкие зоны сети и определяя приемлемое поведение. Это базовое поведение затем можно использовать для управления доступом к каналу в зону с помощью устройств, которые обеспечивают возможности проверки и фильтрации протоколов (например,грамм. промышленный межсетевой экран с возможностью глубокой проверки пакетов). Также возможно на сетевом уровне создавать отпечатки нормальных шаблонов поведения, которые упрощают белые списки сети , которые могут быть реализованы на устройствах с подключением к сети и вне диапазона. Дополнительные сведения о создании белых списков подробно рассматриваются в главе 11 «Обнаружение исключений, аномалий и угроз». Некоторые конкретные примеры сообщений Modbus, которые должны вызывать беспокойство, включают следующее:
Системы защиты от вторжений с поддержкой ICS могут быть настроены для отслеживания этих действий с помощью сигнатур Modbus, таких как сигнатуры, разработанные и распространяемые Digital Bond в рамках проекта QuickDraw. В более критических областях может потребоваться межсетевой экран с поддержкой приложений, фильтр промышленных протоколов или монитор данных приложений для проверки сеансов Modbus и обеспечения того, чтобы Modbus не был «взломан» и не использовался для скрытой связи, команд и управления (т.е. базовый сеанс TCP / IP на порте 502 / tcp не был изменен, чтобы скрыть дополнительные каналы связи внутри нормального трафика Modbus). Это устройство также можно использовать для ограничения функциональных кодов, передаваемых в зону, только теми, которые разрешены для нормальной работы. Это подробно обсуждается в главе 9 «Создание зон и трубопроводов». На рисунке 6.10 показана конфигурация межсетевого экрана прикладного уровня на канале в производственную зону, разделяющую четыре HMI, один EWS и два PLC с использованием протоколов Modbus / TCP и EtherNet / IP (рисунок 6.1). Рисунок 6.10. Межсетевой экран прикладного уровня – защита зоны Modbus / TCP (изображение любезно предоставлено Tofino Security – бренд Belden).Знание основ ПЛКПрограммируемые логические контроллеры (ПЛК) прочно закрепились на арене промышленного производства, и мы были бы упущены, если бы этой технологии не уделялось должного внимания, которого она заслужила. Таким образом, в этом новом отделе EC&M мы публикуем серию статей, основанных на основах ПЛК, и посвященных технологии твердотельной промышленной автоматизации.В этой серии статей, посвященных основам ПЛК, мы рассмотрим аппаратные модули ПЛК; программные возможности; текущие приложения; параметры установки; тестирование и устранение неисправностей; и техническое обслуживание оборудования / программного обеспечения. Что такое ПЛК? Национальная ассоциация производителей электрооборудования (NEMA) определяет ПЛК как «электронное устройство с цифровым управлением, которое использует программируемую память для внутреннего хранения инструкций, реализуя определенные функции, такие как логика, последовательность, синхронизация, подсчет и арифметика для управления через цифровые или аналоговые модули ввода / вывода различных типов машин или процессов.« Один производитель ПЛК определяет его как «твердотельное промышленное устройство управления, которое принимает сигналы от управляемых пользователем устройств, таких как датчики и переключатели, реализует их по точному шаблону, определяемому ходом выполнения приложения на основе релейной диаграммы, хранящимся в пользовательской памяти. и обеспечивает выходы для управления процессами или пользовательскими устройствами, такими как реле или пускатели двигателей ». По сути, это твердотельный программируемый электрический / электронный интерфейс, который может с очень высокой скоростью манипулировать, выполнять и / или отслеживать состояние процесса или системы связи.Он работает на основе программируемых данных, содержащихся в единой микропроцессорной системе. ПЛК может принимать (вводить) и передавать (выводить) различные типы электрических и электронных сигналов, а также может управлять и контролировать практически любые механические и / или электрические системы. Следовательно, он обладает огромной гибкостью при взаимодействии с компьютерами, машинами и многими другими периферийными системами или устройствами. Обычно он запрограммирован в релейной релейной логике и предназначен для работы в промышленных условиях. Как это выглядит? ПЛКбывают разных размеров. Как правило, пространство или размер, которые занимает ПЛК, находятся в прямой зависимости от пользовательских систем и требований ввода / вывода, а также от возможностей дизайна / упаковки выбранного производителя. Шасси ПЛК может быть открытого или закрытого типа. Отдельные модули подключаются к задней панели шасси. Электронные компоненты устанавливаются на печатных платах (PCB), которые находятся внутри модуля. Откуда это взялось? Первый ПЛК был представлен в конце 1960-х годов и являлся развитием программируемого контроллера или ПК (не путать с обозначениями, используемыми для персонального компьютера). ПК используются в индустрии с начала 60-х годов. Потребность в более совершенных и быстрых управляющих реле, которые помещаются в меньшее пространство, а также разочарование из-за негибкости программы (жестко смонтированные реле, шаговые переключатели и барабанные программаторы) породили ПК. Хотя ПК и ПЛК поменялись местами в речи, разница между ними состоит в том, что ПК предназначен для функций управления в фиксированной программе, что в некотором смысле аналогично прошлой проблеме ограниченных возможностей. ПЛК, с другой стороны, требует только переписывания своей программной логики для удовлетворения любых новых требований управляемой системы. Таким образом, ПЛК может адаптироваться к изменениям во многих процессах или мониторингу требований приложений. Как работает ПЛК? Чтобы знать, как работает ПЛК, важно, чтобы мы понимали последовательность сканирования его центрального процессора (ЦП).Методология в основном одинакова для всех ПЛК. Однако по мере добавления в систему специальных аппаратных модулей требуются дополнительные циклы сканирования. Вот один простой процесс сканирования, который задействует каждый ПЛК. Сначала аппаратные модули ввода-вывода сканируются программой релейной логики следующим образом. При включении питания процессор сканирует входной модуль и передает содержимое данных в таблицу или регистр входных изображений. Данные из таблицы выходных изображений передаются в модуль вывода. Затем программа сканируется, и каждый оператор проверяется, чтобы увидеть, было ли выполнено условие. Если условия соблюдены, процессор записывает цифровой бит «1» в таблицу выходных изображений, и периферийное устройство будет запитано. Если условия не выполняются, процессор записывает «0» в таблицу выходных изображений, а периферийное устройство (с использованием «положительной логики») остается обесточенным. A PLC взаимодействует с многочисленными типами внешних электрических и электронных сигналов.Эти сигналы могут быть переменными или постоянными токами или напряжениями. Обычно они находятся в диапазоне от 4 до 20 миллиампер (мА) или от 0 до 120 В переменного тока и от 0 до 48 В постоянного тока. Эти сигналы называются точками ввода / вывода (ввода / вывода). Их общая сумма называется возможностями ввода / вывода ПЛК. С точки зрения электроники это число основано на том, сколько точек ЦП ПЛК может просмотреть или просканировать за указанный промежуток времени. Эта характеристика производительности называется временем сканирования. Однако с практической точки зрения пользователя количество необходимых модулей ввода-вывода, а также количество точек ввода-вывода, содержащихся на каждом модуле ввода-вывода, будут определять, какими должны быть возможности ввода-вывода системы. Важно иметь достаточные возможности ввода / вывода в вашей системе ПЛК. Лучше иметь больше, чем меньше, чтобы, когда в будущем потребуется больше точек ввода-вывода, было проще записать существующие резервные точки ввода-вывода в программное обеспечение (поскольку оборудование уже есть). Наличие запасных точек ввода-вывода не вредит операционной системе; программное обеспечение может быть запрограммировано так, чтобы игнорировать их, и эти точки будут иметь незначительное влияние на время сканирования ПЛК. Программа ПЛК Программа является сердцем ПЛК и написана программистом, который использует элементы, функции и инструкции для проектирования системы, которой ПЛК должен управлять или контролировать.Эти элементы размещаются на индивидуально пронумерованных ступенях релейной логики (RLL). RLL программного обеспечения выполняется процессором в модуле ЦП или модуле контроллера (тот же модуль, другое имя). Существует много типов пакетов проектирования программного обеспечения ПЛК. Один часто выбираемый программный пакет имеет формат RLL и включает в себя контакты, катушки, таймеры, счетчики, регистры, блоки цифрового сравнения и другие типы специальных функций обработки данных. Используя эти элементы, программист проектирует систему управления.Затем внешние устройства и компоненты подключаются к системе, идентичной той, что используется в релейной логике программного обеспечения программиста. Однако не у всех программных элементов будет аппаратный физический аналог. По мере того как процессор ПЛК просматривает (сверху вниз) через программу (цепочка за цепочкой), выполняется каждая цепочка RLL. После этого становится активным проводное устройство, которое зеркалирует программное обеспечение. Таким образом, программное обеспечение является управляющим устройством и предоставляет программисту или технику гибкость, позволяющую «принудительно установить состояние» или «заблокировать устройство» из работы системы.Например, катушка или контакт могут работать непосредственно из программного обеспечения (независимо от проводки шкафа управления к источникам или полевым устройствам ввода). Или устройство можно сделать невидимым (исключить из работы системы), даже если оно электрически жестко подключено и физически находится на своем месте. Отдельные секции ПЛК Общими для всех ПЛК являются четыре секции, каждую из которых можно разделить на более мелкие, но одинаково важные секции. Эти основные секции включают секцию источника питания, которая обеспечивает рабочее питание постоянного тока для ПЛК и базовых модулей ввода / вывода и включает в себя резервное питание от батареи; раздел программного обеспечения; модуль ЦП, который содержит процессор и память; и секция ввода / вывода, которая управляет периферийными устройствами и содержит модули ввода и вывода. Блок питания. Блок питания (PS) получает питание от внешнего источника 120 В или 240 В переменного тока (линейное напряжение), который обычно защищен предохранителем и подается через управляющее реле и фильтр, внешние по отношению к PS. Кроме того, PS имеет собственный встроенный предохранитель переменного тока. Это линейное напряжение затем понижается, выпрямляется, фильтруется, регулируется, защищается по напряжению и току и контролируется состояние, при этом индикация состояния отображается на передней панели PS в виде нескольких светодиодов (светоизлучающих диодов). .PS может иметь переключатель с ключом для защиты памяти или выбора определенного режима программирования. Выход PS обеспечивает низкое напряжение постоянного тока различным модулям ПЛК (обычно с общим допустимым током 20 или 50 А), а также встроенной литиевой батарее, которая используется для резервного копирования памяти. Если PS выходит из строя или его входное линейное напряжение упадет ниже определенного значения, содержимое памяти не изменится по сравнению с тем, каким оно было до отказа. Выход PS обеспечивает питание каждого модуля в ПЛК; однако он не обеспечивает подачу постоянного напряжения на периферийные устройства ввода / вывода ПЛК. Модуль ЦП. «ЦП», «контроллер» или «процессор» – это термины, используемые разными производителями для обозначения одного и того же модуля, выполняющего в основном одни и те же функции. Модуль ЦП можно разделить на две части: процессорную и память. Секция процессора принимает решения, необходимые ПЛК, чтобы он мог работать и связываться с другими модулями. Он обменивается данными по последовательной или параллельной шине данных. Базовый интерфейсный модуль ввода-вывода или отдельные схемы ввода-вывода встроенного интерфейса обеспечивают преобразование сигнала, необходимое для связи с процессором.Секция процессора также выполняет программу RLL программиста. Секция памяти хранит (электронным способом) извлекаемую цифровую информацию в трех выделенных ячейках памяти. Эти участки памяти обычно сканируются процессором. Память будет получать (режим “записи”) цифровую информацию или получать доступ к цифровой информации (режим “чтения”) процессором. Эта возможность чтения / записи (R / W) обеспечивает простой способ внесения изменений в программу. Память содержит данные для нескольких типов информации.Обычно таблицы данных или регистры изображений и программа RLL находятся в памяти модуля ЦП. Программные сообщения могут быть или не быть резидентными с другими данными памяти. Некоторые производители используют резервную батарею для защиты содержимого памяти от потери в случае сбоя питания или модуля памяти. Третьи используют различные технологии памяти на интегральных схемах (ИС) и конструктивные схемы, которые защищают содержимое памяти без использования резервного аккумулятора. Типичный раздел памяти модуля ЦП имеет размер памяти 96 000 (96 КБ) байт. Этот размер говорит нам, сколько мест в памяти доступно для хранения. Дополнительные модули памяти могут быть добавлены к вашей системе ПЛК по мере необходимости в большем объеме памяти. Эти модули расширения добавляются к системе ПЛК по мере добавления модулей ввода / вывода или увеличения программного обеспечения. Когда это будет сделано, размер памяти может достигать 1 024 000 (1024 КБ) байтов. Производители указывают размер памяти в «байтах» или «словах».«Байт равен восьми битам, а бит – это наименьшая цифра в двоичном коде. Это либо логическая« 1 », либо логический« 0. »Длина слова равна двум байтам или 16 битам. Не все производители используют 16-битные слова, поэтому помните о том, что производитель вашего ПЛК определил как разрядность слова памяти. Программное обеспечение. Для работы ПЛК необходимы не только электронные компоненты, но и программное обеспечение. Программист ПЛК не ограничивается написанием программного обеспечения в одном формате. Доступно много типов, каждый из которых с большей готовностью поддается одному приложению, чем другому.Типичным является ранее рассмотренный тип RLL. Другие программы программного обеспечения включают “C”, государственный язык и SFC (последовательные функциональные схемы). Независимо от того, какое программное обеспечение выбрано, оно будет выполняться модулем ЦП ПЛК. Программное обеспечение может быть написано и выполнено с процессором в оперативном состоянии (в то время как ПЛК фактически работает) или в автономном состоянии (при этом выполнение ПО не влияет на текущую работу базы ввода-вывода). В программе RLL мы находим несколько типов элементов программирования и функций для управления процессами как внутренними по отношению к ПЛК (память и регистр), так и внешними (полевыми) устройствами.Ниже перечислены некоторые из наиболее распространенных типов элементов, функций и инструкций: * Контакты (могут быть нормально разомкнутыми или замкнутыми; выделение на мониторе означает, что они активны). * Катушки (могут быть нормальными или фиксированными; выделенный цвет означает, что они находятся под напряжением). * Таймеры (катушка может быть включена или выключена на указанную задержку). * Счетчики (можно считать с приращениями вверх или вниз). * Регистры битового сдвига (могут сдвигать данные на один бит, когда они активны). * Одноразовый (означает, что активен в течение одного времени сканирования; используется для таймера импульса). * Барабаны (могут быть упорядочены по времени или событию). * Инструкции по работе с данными (разрешить перемещение, сравнение цифровых значений). * Арифметические инструкции (включение сложения, вычитания, умножения и деления цифровых значений). Периферийные устройства Периферийные устройства для ПЛК и его базы (баз) ввода / вывода могут быть чем угодно, от главного компьютера и консоли управления до моторного привода или полевого концевого выключателя.Принтеры и промышленные терминалы, используемые для программирования, также являются периферийными устройствами. Периферийные устройства могут генерировать или принимать напряжения и токи переменного или постоянного тока, а также последовательности цифровых импульсов или одиночные импульсы быстрой длины (длительность импульса). Эти внешние управляющие устройства с их иногда резкими и / или быстрыми характеристиками сигнала должны иметь возможность взаимодействовать с чувствительным микропроцессором ПЛК. Для выполнения этой работы доступны различные типы модулей ввода-вывода (с использованием соответствующей экранированной кабельной разводки). Модуль ввода Модуль ввода выполняет две функции: прием внешнего сигнала и отображение состояния этой точки ввода. Другими словами, он принимает сигнал периферийного сенсорного блока и обеспечивает согласование, завершение, изоляцию и / или индикацию состояния этого сигнала. Вход модуля ввода может быть дискретным или аналоговым. Если вход относится к типу ВКЛ-ВЫКЛ, например, с кнопкой или концевым выключателем, сигнал считается дискретным.С другой стороны, если входной сигнал изменяется, например, в зависимости от температуры, давления или уровня, сигнал является аналоговым по своей природе. Периферийные устройства, отправляющие сигналы на модули ввода, которые описывают внешние условия, могут быть переключателями (предельные значения, приближение, давление или температура), кнопками или логическими, десятичными (BCD) или аналого-цифровыми (A / D) схемами. . Эти точки входных сигналов сканируются, и их статус передается через интерфейсный модуль или схемы в каждом отдельном ПЛК и базе ввода / вывода.Ниже перечислены некоторые типичные типы модулей ввода. * Постоянное напряжение (110, 220, 14, 24, 48, 15-30 В) или ток (4-20 мА). * Переменное напряжение (110, 240, 24, 48 В) или ток (4-20 мА). * Вход TTL (транзисторная транзисторная логика) (3-15 В постоянного тока). * Аналоговый вход (12 бит). * Word ввод (16 бит / параллельный). * Вход термопары. * Температурный датчик сопротивления. * Реле сильноточного тока. * Реле слабого тока. * Вход с фиксацией (24 В постоянного тока / 110 В переменного тока). * Изолированный вход (24 В постоянного тока / 85-132 В переменного тока). * Интеллектуальный ввод (содержит микропроцессор). * Вход позиционирования. * Вход ПИД-регулятора (пропорциональный, внутренний, дифференцирующий). * Высокоскоростной импульс. Модуль вывода Модуль вывода передает дискретные или аналоговые сигналы для активации различных устройств, таких как гидравлические приводы, соленоиды, пускатели двигателей, и отображает состояние (с помощью светодиодов) подключенных точек вывода.Формирование сигнала, прерывание и изоляция также являются частью функций модуля вывода. Модуль вывода обрабатывается процессором так же, как модуль ввода. Некоторые стандартные модули вывода, доступные сегодня, включают следующее: * Постоянное напряжение (24, 48, 110 В) или ток (4-20 мА). * Переменное напряжение (110, 240 В) или ток (4-20 мА). * Изолированный (24 В постоянного тока). * Аналоговый выход (12 бит). * Вывод слов (16 бит / параллельный). * Интеллектуальный вывод. * Вывод в формате ASCII. * Двойной коммуникационный порт. УСЛОВИЯ ЗНАТЬ A / D: устройство или модуль, преобразующий аналоговый сигнал в цифровое слово. Адрес: пронумерованное место (номер хранения) в памяти ПЛК для хранения информации. Аналоговый вход: изменяющийся сигнал, передающий информацию об изменении процесса на модуль аналогового ввода. Аналоговый выход: изменяющийся сигнал, передающий информацию об изменении процесса от модуля аналогового вывода. Скорость передачи: количество переданных или полученных битов в секунду; также скорость цифровой передачи, приемлемая для устройства. BCD: Десятичное число с двоичным кодом. Метод, используемый для выражения системы счисления от 0 до 9 (основание 10) как двоичного (основание 2) эквивалента. Бит: одна двоичная цифра. Байт: восемь бит. Центральный процессор (ЦП): интегральная схема (ИС), которая интерпретирует, решает и выполняет инструкции. D / A: Устройство или модуль, преобразующий цифровое слово в аналоговый сигнал Электрически стираемая программируемая постоянная память (EEPROM): То же, что и EPROM, но может стираться электрически. Стираемое программируемое постоянное запоминающее устройство (СППЗУ): память, которую пользователь может стирать и загружать новыми данными много раз, но при использовании в приложении она функционирует как ПЗУ. EPROM не потеряет данные при отключении электроэнергии. Это нанолетучие воспоминания. Регистр изображения / таблица изображений: выделенная область памяти, зарезервированная для состояния битов ввода-вывода. Модуль ввода: обрабатывает цифровые или аналоговые сигналы от полевых устройств. точек ввода / вывода: точки подключения на модулях ввода / вывода, которые подключают полевые устройства ввода и вывода. Миллисекунда: одна тысячная секунды (1/1000 сек, 0,001 сек). Модем: Модем – это аббревиатура от “модулятор / демодулятор”. Это устройство, которое модулирует (смешивает) и демодулирует (разделяет) сигналы. Интерфейс оператора: устройства, которые позволяют операторам системы иметь доступ к базовым условиям ПЛК и ввода / вывода. Модуль вывода: управляет полевыми устройствами. Параллельные данные: данные, байты или слова которых передаются или принимаются со всеми их битами одновременно. Программа: одна или несколько инструкций или операторов, выполняющих задачу. Программирующее устройство: устройство, используемое для указания ПЛК, что делать и когда это должно быть сделано. Оперативная память (RAM): память, в которой данные могут быть доступны по любому адресу без необходимости чтения ряда последовательных адресов. Данные могут быть прочитаны и записаны в места хранения. ОЗУ имеет энергозависимую память, а это означает, что потеря питания приведет к потере содержимого ОЗУ. |
