
Магнитный подшипник — Википедия
Материал из Википедии — свободной энциклопедии
Магнитный подшипникМагнитный подшипник — элемент опоры осей, валов и других деталей, работающих на принципе магнитной левитации. В результате опора является механически бесконтактной. В целом различают пассивные и активные магнитные подшипники. Но если активные магнитные подшипники уже получили определенное распространение, то пассивные подшипники (где магнитное поле создается высокоэнергетическими постоянными магнитами, например, NdFeB) только на стадии разработки.
- Преимущества
Основным преимуществом этих подшипников является отсутствие контакта и вытекающие отсюда:
- высокая износостойкость;
- возможность использования подшипника в агрессивных средах, при высоких или низких температурах (Луна, Марс).
- Недостатки
- В случае исчезновения магнитного поля, что может быть катастрофическим для целой механической системы, нужно обеспечить страховочные подшипники. Обычно это подшипники качения, которые в этом случае могут выдерживать один или два отказа магнитных подшипников, после чего их необходимо заменить.
- Вследствиe того, что магнитное притяжение включает в себя определенную неустойчивость, используют довольно сложные и громоздкие системы управления, которые затрудняют ремонт и эксплуатацию подшипника.
- Нагревание. Обмотка подшипника нагревается вследствие прохождения через неё тока. Иногда это нежелательно, поэтому устанавливаются дополнительные системы охлаждения.
Преимущества магнитных подшипников включают очень низкое и предсказуемое трение, возможность работы без смазки и в вакууме. Они всё чаще используются в промышленных механизмах, таких, как компрессоры, турбины, насосы, моторы и генераторы. Магнитные подшипники используются при генерации электроэнергии, в переработке нефти, в работе станков и при передаче природного газа. Также они используются в газовых центрифугах[1]
, для обогащения урана и в турбомолекулярных насосах, где механические подшипники со смазкой были бы источником нежелательного загрязнения.ru.wikipedia.org
Проверка схемы магнитного подвеса на постоянных магнитах
Ниже рассмотрена конструкция магнитного подвеса Николаева, который утверждал, что можно обеспечить левитацию постоянного магнита без упора. Показан опыт с проверкой работы данной схемы.
Сами неодимовые магниты продаются в этом китайском магазине.
Магнитная левитация без затрат энергии – фантастика или реальность? Можно ли сделать простейший магнитный подшипник? И что же на самом деле показал Николаев в начале 90-х? Давайте рассмотрим эти вопросы. Каждый, кто когда-либо держал в руках пару магнитов, наверняка задавался вопросом: “Почему не получается заставить один магнит парить над другим без посторонней поддержки? Обладая таким уникальным свойством, как постоянное магнитное поле, они отталкиваются одноименными полюсами совершенно без затрат энергии. Это великолепная основа для технического творчества! Но не все так просто.
Еще в 19 веке британский ученый Earnshaw доказал, что используя только постоянные магниты, невозможно устойчиво удерживать левитирующий объект в гравитационном поле. Частичная левитация или, иначе говоря, псевдолевитация, возможна лишь при механической поддержке.
Как сделать магнитный подвес?
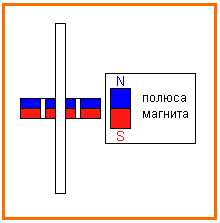
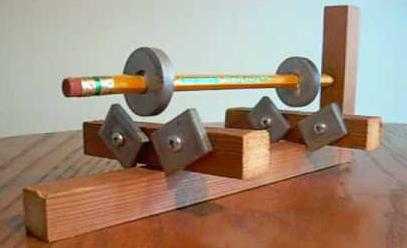
Простейший магнитный подвес можно сделать за пару минут. Понадобятся 4 магнита в основании,чтобы сделать опорную базу, и пара магнитов, закрепленных на самом левитирующим объекте, в качестве которого можно взять, например, фломастер. Тем самым мы получили парящую конструкцию с неустойчивым равновесием по обе стороны оси фломастера. Стабилизировать положение поможет обычный механический упор.
 Простейший магнитный подвес с упором
Простейший магнитный подвес с упоромЭту конструкцию можно настроить таким образом, чтобы основной вес левитирующего объекта ложился на опорные магниты, а боковая сила упора была настолько мала, что механическое трение там практически стремится к нулю.
Теперь было бы логично попытаться заменить механический упор на магнитный, чтобы добиться абсолютной магнитной левитации. Но, к сожалению, сделать это не получается. Возможно, дело в примитивности конструкции.
Альтернативная конструкция.
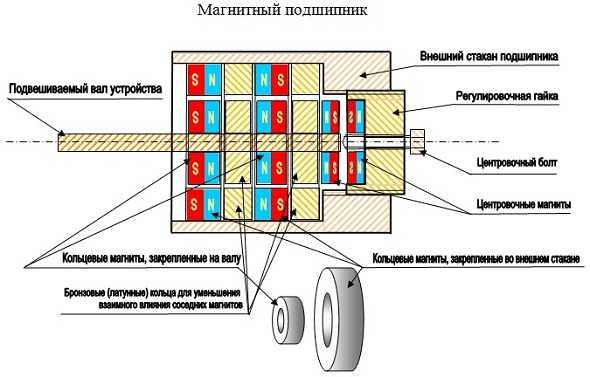
Рассмотрим более надежную систему такого подвеса. В качестве статора используются кольцевые магниты, сквозь которые проходит ось вращения подшипника. Оказывается, в определенной точке кольцевые магниты обладают свойством стабилизировать другие магниты вдоль своей оси намагниченности. А в остальном имеем то же самое. Нет устойчивого равновесия вдоль оси вращения. Это и приходится устранять регулируемым упором.
Рассмотрим конструкцию более жесткую.
Возможно здесь удастся стабилизировать ось при помощи упорного магнита. Но и здесь так и не удалось добиться стабилизации. Возможно, упорные магниты нужно размещать с обеих сторон от оси вращения подшипника. В интернете давно обсуждается видео с магнитным подшипником Николаева. Качество изображения не позволяет детально рассмотреть эту конструкцию и складывается впечатление что ему удалось добиться устойчивой левитации исключительно при помощи постоянных магнитов. При этом схема устройства идентична показанной выше. Добавлены лишь второй магнитный упор.
Проверка конструкции Геннадия Николаева.
Сначала посмотрите полное видео, на котором показан магнитный подвес Николаева. Этот ролик заставил сотни энтузиастов в России и за рубежом попытаться сделать конструкцию, которая смогла бы создать левитацию без упора. Но, к сожалению, в настоящее время не создана действующая конструкция такого подвеса. Это заставляет усомниться в модели Николаева.
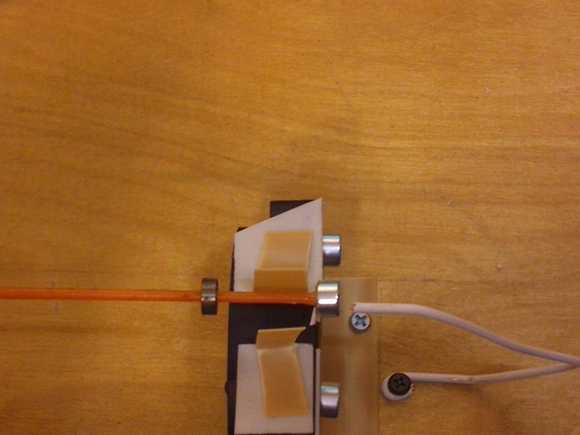
Для проверки была сделана точно такая-же конструкция. Кроме всех дополнений были поставлены такие же, как у Николаева, ферритовые магниты. Они слабее неодимовых и не выталкивают с такой огромной силой. Но проверка в серии экспериментов принесла только разочарование. К сожалению, и эта схема оказалась нестабильной.
Заключение.
Проблема в том что кольцевые магниты, какими бы сильными они не были, не в состоянии удержать ось подшипников в равновесии при том усилии со стороны боковых упорных магнитов, которое нужно для ее боковой стабилизации. Ось просто соскальзывают в сторону при малейшем движении. Другими словами, сила, с которой кольцевые магниты стабилизируют ось внутри себя, всегда будет меньше силы, необходимой для стабилизации оси в боковом направлении.
Так что же все-таки показал Николаев? Если более внимательно посмотреть это видео, то возникает подозрение, что при плохом качестве видео просто не видно игольчатый упор. Случайно ли Николаев не старается демонстрировать самое интересное? Не отвергается сама возможность абсолютной левитация на постоянных магнитах, закон сохранения энергии здесь не нарушается. Возможно, еще не создали такую форму магнита, которая создаст необходимую потенциальную яму, надежно удерживающую связку других магнитов в устойчивом равновесии.
Далее схема магнитного подвеса
 Чертеж магнитного подвеса на постоянных магнитах
Чертеж магнитного подвеса на постоянных магнитах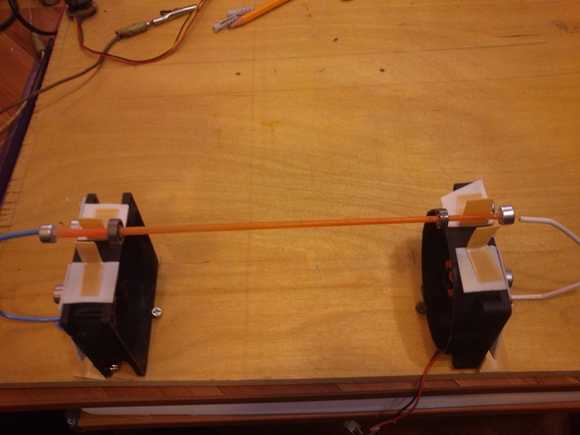


Использованы материалы с сайтов youtube.com и форума matri-x.ru
izobreteniya.net
МАГНИТНЫЙ ПОДВЕС • Большая российская энциклопедия
-
В книжной версии
Том 18. Москва, 2011, стр. 383
Скопировать библиографическую ссылку:
Авторы: И. П. Киселёв
МАГНИ́ТНЫЙ ПОДВЕ́С (магнитное подвешивание), бесконтактное подвешивание, обеспечивающее действие транспортного средства и его передвижение вдоль путепровода. Осуществляется в результате взаимодействия магнитных полей, создаваемых на ходовой части транспортного средства и в путевой структуре. Для прокладки пути строят спец. путевую структуру, в которой укладывается развёрнутая обмотка линейного электродвигателя
bigenc.ru
Магнитный подшипник
Магнитный подшипник, как и остальные механизмы подшипниковой группы, служит опорой для вращающегося вала. Но в отличие от распространенных подшипников качения и подшипников скольжения соединение с валом является механически бесконтактным, то есть используется принцип левитации.
Магнитный подвес
Классификация и принцип работы
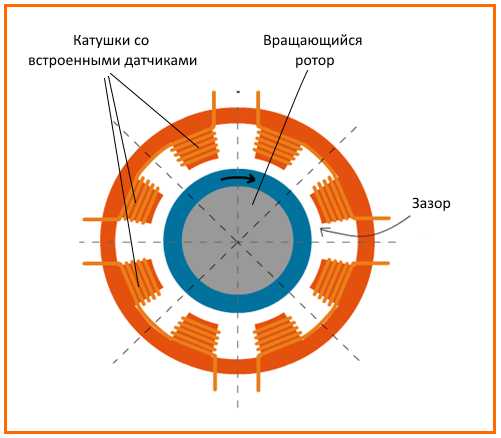
Используя принцип левитации, вращающийся вал буквально парит в мощном магнитном поле. Контролировать движение вала и координировать работу магнитной установки позволяет сложная система датчиков, которая постоянно отслеживает состояние системы и подает необходимые управляющие сигналы, меняя силу притяжения с той или иной стороны.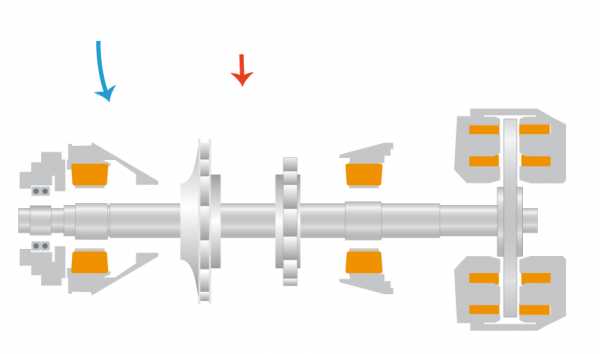
Принцип работы
Магнитные подшипники делятся на две большие группы – активные и пассивные. Более подробно об устройстве каждого типа подшипника ниже.- Активные магнитные подшипники.
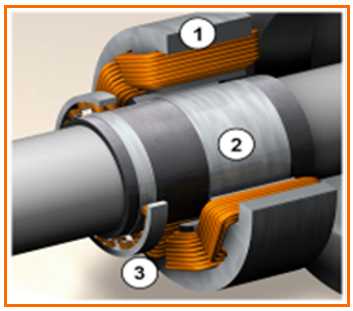
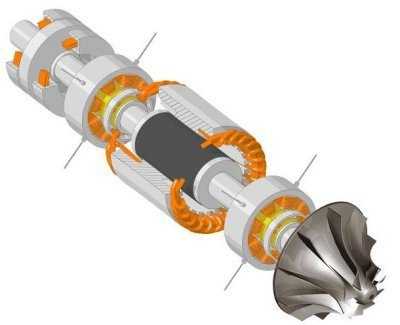
Устройство активного магнитного подвеса
1, 3 – силовые катушки; 2 — вал Различают радиальный и упорные механизмы (по типу воспринимаемой нагрузки), но принцип работы у них один и тот же. Используется специальный ротор (обычный вал не подойдет), модифицированный ферромагнитными блоками. Этот ротор «висит» в магнитном поле, создаваемом электромагнитными катушками, которые находятся на статоре, то есть вокруг вала на 360 градусов, образуя кольцо.Между ротором и статором образуется воздушный зазор, что позволяет деталям вращаться с минимальным трением.
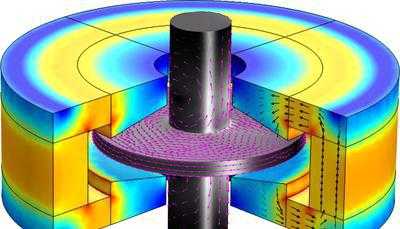
Система в разрезе
Изображенным механизмом управляет специальная электронная система, которая с помощью датчиков постоянно отслеживает положение ротора относительно катушек и при малейшем его смещении подает управляющий ток на соответствующую катушку. Это позволяет поддерживать ротор в одном и том же положении.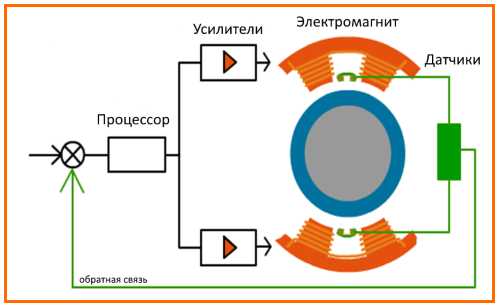
Устройство электронной системы управления.
Расчет таких системы можно более детально изучить в приложенной документации.- Пассивные магнитные подшипники.
Пассивный МП
Ротор оснащен постоянным магнитом так же, как и статор, расположенный кольцом вокруг ротора. Одноименные полюса расположены рядом в радиальном направлении, что создает эффект левитации вала. Подобную систему можно даже собрать своими руками.Преимущества
Разумеется, основным преимуществом является отсутствие механического взаимодействия между вращающимся ротором и статором (кольцом).Из этого следует, что подобные подшипники очень долговечны, то есть обладают повышенной износоустойчивостью. Также конструкция механизма позволяет использовать его в агрессивных средах – повышенная/пониженная температура, агрессивная воздушная среда. Поэтому МП находят все большее применение в космической промышленности.
Недостатки
К сожалению, система обладает и большим количеством недостатков. К ним относятся:- Сложность управления активными подвесами. Необходима сложная, дорогостоящая электронная система управления подвесом. Ее использование может быть оправдано только в «дорогих» отраслях – космической и военной.
- Необходимость использования страховочных подшипников. Резкое отключение электричества или выход из строя магнитной катушки может привести к катастрофическим последствиям для всей механической системы. Поэтому для страховки совместно с магнитными используют и механические подшипники. В случае отказа основных, они смогут взять на себя нагрузки и избежать серьезной поломки.
- Нагрев обмотки катушек. Вследствие прохождения тока, создающего магнитное поле, обмотка катушек нагревается, что зачастую является неблагоприятным фактором. Поэтому необходимо использовать специальные охлаждающие установки, что еще больше увеличивает стоимость использования подвеса.
Области применения
Возможность работы при любых температурах, в условиях вакуума и отсутствия смазки позволяет использовать подвесы в космической промышленности, в станках нефтеперерабатывающей промышленности. Также они нашли свое применение в газовых центрифугах для обогащения урана. Различные электростанции также используют магнитные подвесы в своих генерирующих установках.
Вариант исполнения подвеса
Ниже несколько интересных видео по теме.Не забудь сохранить статью!
podshipnikcentr.ru
Магнитный подшипник на постоянных магнитах.: afhh723 — LiveJournal
насмотревшись видео отдельных товарищей, типа таких
решил и я отметится в этой теме. на мой взгляд видео довольно безграмотное, так что вполне можно по-свистеть из партера.
перебрав в голове кучу схем, посмотрев принцип подвеса в центральной части в видео Белецкого, поняв как работает игрушка “левитрнон”, пришел к простой схеме. понятно, что опорных шипа должно быть два на одной оси, сам шип выполнен из стали, а кольца жестко на оси зафиксированны. вместо цельных колец вполне можно уложить не очень большие магниты в форме призмы или цилиндра расположенные по окружности. принцип такойже как в известной игрушке “ливитрон”. только вместо героскопического момента, который не дает волчку опрокинутся мы используем “распор” между жестко закрепленными на оси подставками.
ниже видео с игрушкой “ливитрон”
а здесь схема которую предлагаю я. по сути это и есть игрушка на видео выше, но как я уже говорил, ей необходимо что-то что не давало бы опорному шипу опрокинутся. в видео выше используется гироскопический момент, я использую две подставки и распор между ними.
в другом своем видио господин белицкий всеже вытачил конические магнитопроводы, даже сделал оттверстие по сиредине упора. но вместо того, чтобы прилипить магнит-кольцо и оставить в серидине упора напряженность поля минимальной, он зачем-то использовал магнит-цилинд (цельный кругляк). и удивляется говорит “вроде шип в упоре находит стабилизацию, но при дальнейшим продвижении в упор – прилипает к магниту.” глубокомысленное заявление – оказывается если ферромагнетик поднести вплотную к магниту он прилипнит к магниту – мягко говоря нобелевка.
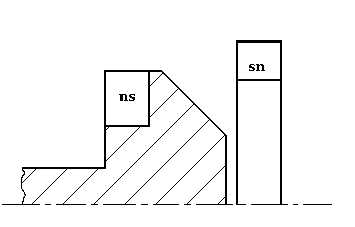
шип скорей всего надо делать острей и пройти черз кольцо – но не суть. попробуем обосновать работу это конструкции, как я её вижу:
магниты отатлкиваются, значит слабое место – нужно стабилизировать эти шипы по оси. здесь я использовал такую идею: магнит пытается вытолкнуть шип в зону с наименьшей напряженностью поля, т.к. шип имеет противоположную кольцу намагниченость и сам магнит кольцевой, где в достаточно большой области, расположенной вдоль оси, напряженность меньше чем на переферии. т.е. распределение напряженности магнитного поля по-форме напомянает стакан – в стенке напряженность максимальна, а на оси минимальна.
шип должен стабилизироваться по оси, с одновременным выталкиванием из кольцевого магнита в зону с наименьшей напряженностью поля. т.е. если таких шипа два на одной оси и кольцевые магниты жестко зафиксированны – ось должна “зависнуть”.
получается, что находится в зоне с меньшей напряженностью поля наиболее энергетически выгодно.
думаю автор этой картинки в рассуждения особо не вдовался и сделал все “по-понятиям”:
порывшись еще в интернете нашел похожую конструкцию:
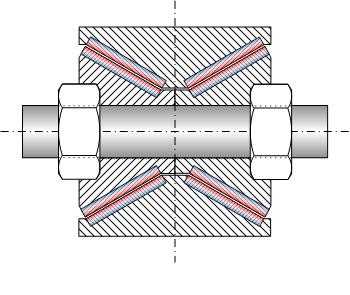
здесь тоже формируется зона с меньшей напряженностью, находится она тоже по оси между магнитами, так же используется угол. в общем идеалогия очень похожая, однако если говрить о компактном подшипнике – вариант выше выглядит лучше, однако требует магнитов специальной формы. т.е. разница между схемами в том, что я выдавливаю в зону с меньшей напряженностью опорную часть, а в схеме выше само формирование такой зоны обеспечивает положение на оси.
для наглядности сравнения я перерисовал свою схему: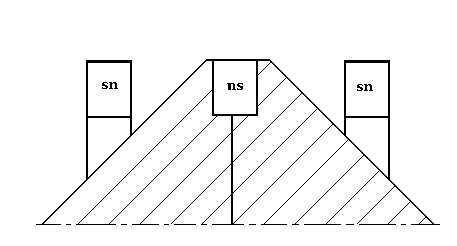
по сути они зеркальны. вообще идея не нова – все они крутятся вокруг одного и того же, у меня даже есть подозрения, что автор ролика выше просто не искакал предполагаемых решений
здесь практически один в один, если конические упоры сделать не цельным, а составными – магнитопровод + кольцевой магнит, то получится моя схема. я бы даже сказал начальная неоптимизированная идея – рисунок ниже. только рисунок выше работает на “притяжение” ротора, а я изначально планировал “отталкивание”
для особо одаренных хочу заметить, данный подвес не нарушает теоремы (запрет) Ирншоу. дело в том что речь идет здесь не о чисто магнитном подвесе, без жесткой фиксации центров на оси т.е. одна ось жестко зафиксирована, ничего работать не будет. т.е. речь идет о выборе точки опоры и не более того.
на всамом деле, если посмотреть видео Белецкого, то там видно, что примерно такая конфигурация полей уже используется где не поподя, не хватает только финального штриха. конический магнитопровод распределяет “отталкивание” по двум осям, третью же ось Ирншоу велел зафиксировать иначе, я не стал спорить и жестко её зафиксировал механически. почему Белецкий не попробывал такой вариант я не знаю. фактически ему нужно два “ливитрона” – подставки зафиксировать на оси, а на волчки соединить например медной трубкой.
еще можно заметить, что можно использовать наконечники из любого дастаточно сильного диамегнетика в место магнита полярности противоположной магнитному опорному кольцу. т.е. заменить связку магнит+конический магнитопровод, просто на конус из диамагнетика. фиксация на оси будет более надежной, но диамагнетики не отличаются сильным взаимодействием и нужны большие напряженности поля и большой “объем” этого поля, чтобы применять это хоть как-то. за счет того что поле аксильно равномерное относительно оси вращения, изменения потока магнитной индукции происходить при вращении не будет т.е. подобный подшипник не создаёт противодействия вращению. в этом кстати и слабое место т.е. ось вращения должна точно совпадаь с осью симетрии магнитного поля, и чем больше она не совпадает – тем больше изменение потока со всеми вытикающими.
по логике вещей такой принцип должен быть применим и для подвески плазмы – пропатченная “магнитная бутылка” (пробкотрон), что же поживем – увидем.
почему я так уверен в результате? ну потому что его не может не быть 🙂 единственно что возможно придется сделать магнитопроводы в форме конуса и чашки для более “жесткой” конфигурации поля.
ну и такжк можно найти видео с подобным подвесом:
здесь автор не использует каких-либо магнитопроводов и использует упор на иглу, как в общем-то и нужно, понимая теорему Ирншоу. но ведь кольца уже жестко закреплены на оси, значит можно распереть ось между ними, чего лего добится используя конические магнитопроводы на магнитах на оси. т.е. пока не пробили “дно” “магнитного стакана” магнитопровод все труднее впихнуть в кольцо т.к. магнитная проницаемость воздуха меньше чем магнитопровода – уменьшение воздушной прослойки приведет к возрастанию напряженности поля. т.е. одна ось жестко закреплена механически – тогда опор на иглу будет не нужен. т.е. см. самый первый рисунок.
P.S.
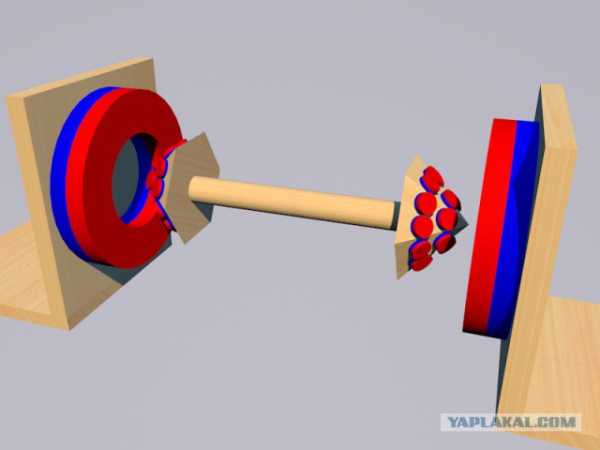
вот чего нашел. из сери дурная голова рукам покая не дает – автор тот еще белецкий – накручено там мама не горюй – конфигурация поля довольно сложная, более того не однородная по оси вращения т.е. при вращении буде изменение пока магнитной индукции в оси со всеми вытикающими… обратите внимание на шарик в кольцевом магните, с другой же стороны в кольцевом магните цилиндр. т.е. человек тупо испохабил принцип подвеса описанный здесь.
ну или пропаичил подвес на фотографии т.е. перцы на фото используют опор на иглу, а он в место иглы повесил шарик – ай шайтан – сработало – кто бы мог подумать (помню мне доказывали что я не правильно понимаю теорему Ирншоу), однако ума повесить два шарика и использовать всего два кольца видимо не хватает. т.е. количество магнитов в устройстве на видео можно легко сократить до 4-х, а возможно до 3-х т.е. конфигурацию с цилиндром в одном кольце и шариком в другом можно считать экспериментально доказаной работающей см. рисунок изначальной идеи. там я использовал два симитричных упора и цилинд + конус, хотя считаю что конус что часть сферы от полюса до диаметра работают одинакого.
стало быть сам упор выглядит так – это магнитопровод (т.е железный, никелевый и т.п.)в него просто
закладывается магнит-кольцо. ответнаая часть такая же, только наоборот 🙂 и работают два упора в распоре- товарищ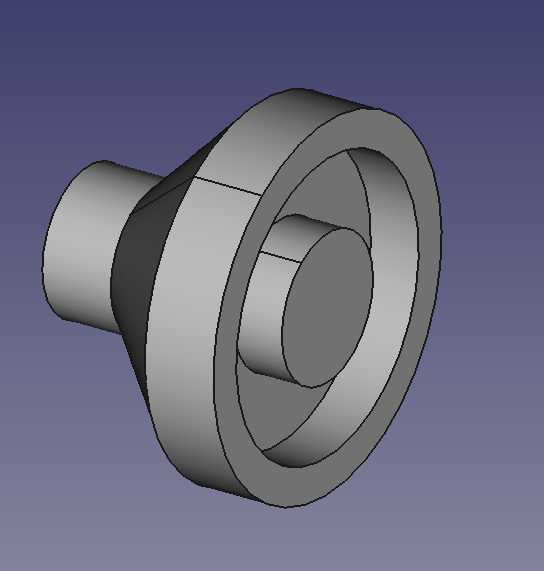 Ирншоу запретил рабоать по одному упору.
Ирншоу запретил рабоать по одному упору.
afhh723.livejournal.com
Активный магнитный подшипник
Всем известно, что магниты имеют свойство притягивать металлы. Также один магнит может притянуть другой. Но взаимодействие между ними не ограничено лишь притяжением, они могут отталкивать друг друга. Дело в полюсах магнита – разноименные полюса притягиваются, одноименные – отталкиваются. Это свойство положено в основу всех электродвигателей, и довольно мощных.

Также существует такое понятие, как левитация под действием магнитного поля, когда помещенный над магнитом предмет (имеющий сходный с ним полюс) зависает в пространстве. Этот эффект был применен на практике в так называемом магнитном подшипнике.
Что представляет собой магнитный подшипник
Устройство электромагнитного типа, в котором вращающийся вал (ротор) поддерживается в неподвижной части (статоре) силами магнитного потока, называется подшипником магнитным. Когда механизм находится в работе, на него оказывают влияние физические силы, стремящиеся сместить ось. Чтобы их преодолеть, магнитный подшипник оснастили системой контроля, которая следит за нагрузкой и подает сигнал управления силой магнитного потока. Магниты, в свою очередь, сильнее или слабее воздействует на ротор, сохраняя его в центральном положении.
Магнитный подшипник нашел широкое применение в промышленности. Это в основном мощные турбомашины. Благодаря отсутствию трения и, соответственно, необходимости применять смазочные материалы, во много раз повышается надежность машин. Износ узлов практически не наблюдается. Также повышается качество динамических характеристик и возрастает КПД.
Активные магнитные подшипники
Подшипник магнитный, где силовое поле создается при помощи электромагнитов, называется активным. Электромагниты позиционные расположены в статоре подшипника, ротор представлен металлическим валом. Вся система, обеспечивающая удержание вала в агрегате, называется активным магнитным подвесом (АМП). Он имеет сложное строение и состоит из двух частей:
- блока подшипников;
- системы электронного управления.
Основные элементы АМП
- Подшипник радиальный. Устройство, которое имеет электромагниты на статоре. Они удерживают ротор. На роторе имеются специальные пластины из ферромагнита. При подвешивании ротора в средней точке отсутствует его контакт со статором. Индуктивные датчики отслеживают малейшее отклонение положения ротора в пространстве от номинального. Сигналы от них управляют силой магнитов в той или иной точке для восстановления равновесия в системе. Зазор радиальный составляет 0.50-1.00 мм, осевой – 0.60-1.80 мм.
- Магнитный подшипник упорный работает таким же образом, как и радиальный. На валу ротора закреплен упорный диск, по обе стороны которого располагаются электромагниты, закрепленные на статоре.
- Подшипники страховочные предназначены для удержания ротора, когда устройство находится в выключенном состоянии либо в аварийных ситуациях. В процессе работы вспомогательные магнитные подшипники не задействованы. Зазор между ними и валом ротора в два раза меньше, чем у магнитного подшипника. Страховочные элементы собраны на базе шариковых устройств либо подшипников скольжения.
- Электроника управления включает в себя датчики положения вала ротора, преобразователи и усилители. Вся система работает по принципу регулировки магнитного потока в каждом отдельном модуле электромагнита.
Пассивные подшипники магнитного типа
Магнитные подшипники на постоянных магнитах – это системы удержания вала ротора, в которых не используется схема управления, включающая обратную связь. Левитация осуществляется только за счет сил высокоэнергетических постоянных магнитов.
Недостатком такого подвеса является необходимость использования механического упора, что приводит к образованию трения и снижению надежности системы. Магнитный упор в техническом смысле еще не реализован в этой схеме. Поэтому на практике пассивный подшипник применяют нечасто. Есть запатентованная модель, например подвес Николаева, которую пока не удалось повторить.
Магнитная лента в ступичном подшипнике
Понятие “магнитный ступичный подшипник” относится к системе ASB, которая широко используется в современных автомобилях. Подшипник ASB отличается тем, что внутри имеет встроенный датчик скорости вращения колеса. Этот датчик является активным устройством, внедренным в прокладку подшипника. Он построен на базе магнитного кольца, на котором чередуются полюсы элемента, считывающего изменение магнитного потока.
Когда подшипник вращается, происходит постоянное изменение магнитного поля, создаваемого магнитным кольцом. Датчик проводит регистрацию этого изменения, формируя сигнал. Далее сигнал попадает в микропроцессор. Благодаря нему работают такие системы, как ABS и ESP. Уже они корректируют работу автомобиля. ESP отвечает за электронную стабилизацию, ABS регулирует вращение колес, уровень давления в системе – тормозной. Он следит за работой рулевой системы, ускорением в боковом направлении, а также корректирует работу трансмиссии и двигателя.
Главным плюсом подшипника ASB является возможность контролировать скорость вращения даже при очень низких оборотах. При этом массогабаритные показатели ступицы улучшаются, монтаж подшипника упрощается.
Как сделать подшипник магнитный
Простейший магнитный подшипник своими руками сделать несложно. Он не подойдет для практического применения, зато наглядно покажет возможности магнитной силы. Для этого понадобятся четыре неодимовых магнита одного диаметра, два магнита чуть меньшего диаметра, вал, например отрезок пластиковой трубки, и упор, например стеклянная пол-литровая банка. Магниты меньшего диаметра с помощью термоклея крепят к торцам трубки таким образом, чтобы получилась как бы катушка. Посередине одного из этих магнитов снаружи приклеивают пластиковый шарик. Одинаковые полюса должны смотреть наружу. Четыре магнита такими же полюсами вверх раскладывают попарно на расстоянии длины отрезка трубки. Ротор располагают над лежащими магнитами и с той стороны, где приклеен пластиковый шарик, подпирают его пластиковой банкой. Вот магнитный подшипник и готов.
fb.ru
Использование магнитных подвесов при проектировании ВЭУ с вертикальной и горизонтальной осью вращения
Библиографическое описание:
Бубенчиков А. А., Айдосов Д. С., Коломеец Н. А. Использование магнитных подвесов при проектировании ВЭУ с вертикальной и горизонтальной осью вращения // Молодой ученый. 2016. №22.3. С. 7-11. URL https://moluch.ru/archive/126/35128/ (дата обращения: 21.11.2019).
Работа выполнена при поддержке гранта №МК-5098.2016.8
В статье исследуется тема использования магнитных подвесов при проектировании ветроэнергетических установок с вертикальной и горизонтальной осью вращения (ВЭУ). Анализируются применения обычных и магнитных подшипников в подвесах ВЭУ. Описываются преимущества магнитных подвесов в проектировании и их характеристика. Выделяются и изображаются характерные особенности структурных составляющих постоянных магнитов. Обобщается практический опыт использования магнитных подвесов в ветроэнергетических установках.
Ключевые слова: постоянный магнит, подвес, ветроэнергетическая установка.
Мир рано или поздно столкнется с тем, что запасы не возобновляемых сырьевых ресурсов — нефти, газа и угля — будут исчерпаны. Чем активнее мы их используем, тем меньше их остается, и тем дороже они нам обходятся. По расчетам специалистов, при нынешних объемах добычи угля, нефти и газа запасов сырья на Земле хватит меньше, чем на сто лет. К тому же опустошение земных недр и сжигание топлива уродуют планету и год от года ухудшают ее экологию [1].
Применение технологии магнитного подвеса в роторных системах в наше время получает все большее применение. Это обусловлено рядом значительных преимуществ магнитных подшипников (ЭМП) по сравнению с механическими, основным из которых является отсутствие трения [2].
Современные ветроэнергетические установки (ВЭУ) обладают сроком службы не менее 20 лет. Они работают в довольно тяжелых климатических условиях при температурах от – 60 до + 40 °С, что судит требование высокой надежности этих установок при минимальных затратах на обслуживание. Надежность ВЭУ непосредственно связана с проблемой повышения долговечности подшипниковых узлов. Очевидно, что проблема может быть разрешена как за счет улучшения традиционных подшипников качения и скольжения, так и созданием нетрадиционных подшипников, в которых используются иные физические принципы действия. Значительным недостатком подшипников качения является наличие механического контакта между подвижными и неподвижными частями и надобностью в смазке дорожек качения. В подшипниках скольжения механический контакт отсутствует, но они требуют системы подачи смазочного материала для создания смазочного слоя и герметизация данного слоя [3].
От указанных изъянов свободны магнитные подшипники, в которых для создания опорных реакций применяется магнитное поле. В подвесах на постоянных магнитах (ППМ) магнитное поле создается постоянными магнитами. Наиболее подходящими материалами для изготовления постоянных магнитов в настоящее время проявляется композиция NdFeB. Подвесы на постоянных магнитах отличаются простотой и экономичностью, т. е. не требуют дополнительных источников энергии для обеспечения левитации. Подвес ротора такого типа работает даже в условиях неподвижной ветроэнергетической установки. Однако им свойственны следующие недостатки: низкая механическая прочность постоянных магнитов; не рассеивают механическую энергию при колебаниях подвешенного тела, поэтому нуждаются в особых демпферах; не позволяют реализовать полную устойчивость неконтактной подвески.
Рентгеновские анализы показывают, что сплавы, имеющие оптимальные характеристики состоят из сферической формы кристаллитов равновесия на основе Nd-Fe-B [3, 13].
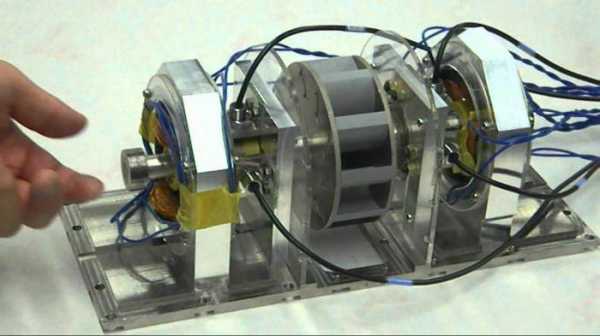
В результате отмеченных изъянов опоры на постоянных магнитах разумно применять для разгрузки механических опор или в сочетании с активными магнитными опорами. Подвес на постоянных магнитах (ППМ) заключается из нескольких магнитных модулей в зависимости от величины усилия, которое нужно скомпенсировать (рис. 1). Предпочтение такой конструкции обусловливается ограничениями на габаритные размеры магнитных модулей. В анализируемом устройстве это внешний диаметр оси ротора 4 (Dо.р. = 159 мм) и внутренний диаметр корпуса ступицы 7 (Dк.с. = 305 мм). Кроме этого, имеются ограничения на величины изготавливаемых магнитов (внешний диаметр кольца постоянного магнита не должен превышать 220 мм). С другой стороны, достаточно значительное расстояние между шарикоподшипниками (L = 2000 мм) санкционирует использовать в ППМ до шести магнитных модулей. Каждый магнитный модуль 1 заключается из двух платформ 2 и 3. Верхняя платформа 2 фиксируется на оси ротора 4. Нижняя платформа 3 — на внутренней поверхности корпуса ступицы. Корпус ступицы вращается и передает момент вращения генератору ВЭУ. В свою очередь магнитные платформы состоят из обечаек 9 и 10, на которых устанавливаются: постоянные магниты 11; стальная прокладка 14; крышка из алюминиевого сплава 15.
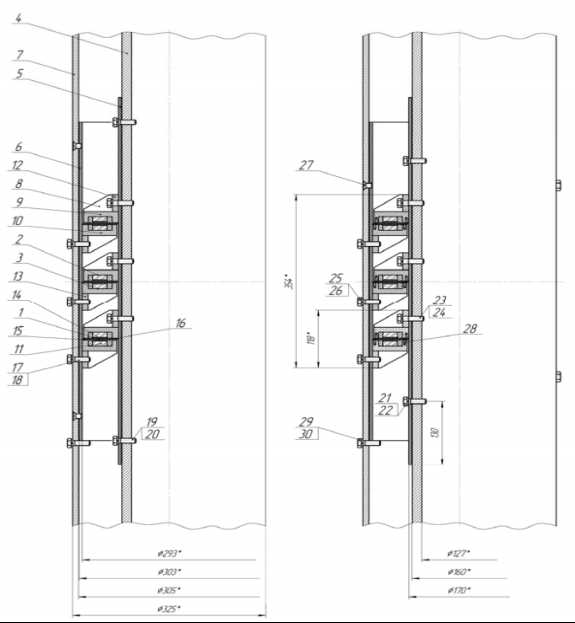
Рис.1. Схема подвеса на постоянных магнитах
Для обеспечения совершенной герметичности обечайку заполняют эпоксидным компаундом. Каждый постоянный магнит покрыт защитным слоем (белый цинк) и располагает формой сегмента, что разрешает уложить магниты в обечайке в виде кольца. Каждое кольцо включает 24 магнита марки Н342/1,32/876/955 толщиной 10 мм и массой 55,4 грамма. Так как в местах стыковки магнитов однородность магнитного поля нарушается, то может появиться пульсация магнитного потока внутри модуля, что неминуемо вызовет вихревые токи и добавочные потери при работе магнитного подвеса. Для уменьшения негативных результатов этого эффекта применяется стальная магнитная прокладка 14, которая располагается поверх кольца, составленного из постоянных магнитов. Кроме этого, крышка платформы 15 реализована из алюминиевого сплава с высокой электропроводностью и выполняет роль демпфера при изменении магнитного потока магнитного модуля. Устройство магнитного модуля надежно защищает постоянные магниты от разнообразных внешних влияний, в том числе и от влияния влаги. Не исключена вероятность образования конденсата во внутренней полости корпуса ступицы. В связи с этим все стальные части модуля окрашены, завершающая окраска реализовывается после сборки элементов магнитного модуля. Для обеспечения верного крепления магнитных модулей к обечайке 9 привариваются внутреннее кольцо 12 и косынки 8, а к обечайке 10 привариваются внешнее кольцо 13 и косынки 8. Верхняя платформа 2 крепится к внутреннему стеклотекстолитовому цилиндру 5 винтами 17 (М10х18). Подобным образом нижняя платформа крепится к внешнему стеклотекстолитовому цилиндру 5 винтами 17 (М10х18). В свою очередь внутренний стеклотекстолитовый цилиндр 5 укрепляется к оси ротора 4 болтами 21 (М12х25). Добавочную прочность соединения снабжают болты 23 (М10х35). Внешний стеклотекстолитовый цилиндр 6 крепится к корпусу ступицы 7 болтами 18 (М12х25). Добавочную прочность соединения обеспечивают болты 25 (М10х28) [4, 5].
Рост интереса к СМП во многом определено улучшением магнитных свойств и снижением цен на нынешние магнитные материалы, которые употребляются в качестве источников постоянных магнитных полей. Эти материалы базируются на переходных (Fe, Co) и редкоземельных (Sm, Pr, Nd) элементах. В особенности востребованными являются NdFeB магниты. Согласно данным, приведенным Орловым П. И. [5], за последнее время характеристики постоянных магнитов NdFeB существенно улучшились. На рис. 2 приведены диаграммы повышения магнитных свойств некоторых материалов и их использование в разные периоды двадцатого столетия [6].
Как видно из рисунка, к концу прошлого столетия возникли новые материалы, располагать высоким значением запасенной удельной энергии. Это магниты Nd-Fe-B и Sm-Co. Магниты Nd-Fe-B обладают преимуществом по сравнению с магнитами Sm-Co. Они не только мощнее, но и более доступны и менее дороги.
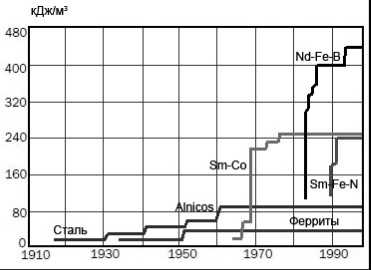
Рис.2. Магнитные свойства материалов
Устойчивым подвесом с постоянными магнитами является электродинамический подвес. Принцип его работы заключается на возникновении в проводящих материалах вихревых токов. Вихревые токи могут быть индуцированы переменным магнитным полем или движением системы проводников в постоянном магнитном поле. Из этого следует, в электродинамическом подвесе подъемная сила появляется только при перемещении магнитного поля вблизи проводящей поверхности и отсутствует в состоянии покоя. В ряде случаев его техническое исполнение является недочётом подвесов такого типа, который компенсируется введением опор качения для низких скоростей. Генератор предназначен для простоты и легкости производства и состоит из двух роторных дисков друг с постоянными магнитами, размещенными вокруг его периферии [7, 14].
В конце ХХ века было сделано открытие, разрешающее сконцентрировать магнитное поле от нескольких постоянных магнитов без затраты дополнительной энергии, что разрешает увеличить магнитную индукцию системы. Впервые вероятность сконцентрировать магнитное поле с одной стороны магнита обосновал J. C. Mallinson [8]. Он обосновал, что, при определенных условиях, имеется возможность снизить магнитный поток на одной стороне магнита и снизить его на другой стороне. Первоначально полагалось, что такая возможность разрешит уменьшить влияние магнитного поля на чувствительные материалы, например, усовершенствовать характеристики записи на магнитную ленту.
В дальнейшем, при изучении возможности использования постоянных магнитов в ускорителях и накопительных кольцах, Клаус Хальбах [9, 10] предложил необычную схему расположения магнитов, согласно которой вектор индукции каждого последующего магнита повернут на обусловленный угол по отношению к предыдущему. В этом случае поле с одной стороны полученного массива становится больше, чем с другой. Следствием исследований Хальбаха предстали массивы постоянных магнитов, известные теперь как магнитная решетка и цилиндр Хальбаха, в центре которого сосредоточивается магнитное поле большее, чем поля отдельных элементов массива. Физически, данные условия обозначают, что сила тяжести свободного кольца уравновешивается магнитным взаимодействием кольцевых токов. В одном случае, мы имеем магнитную подушку (свободное кольцо находится над неподвижным), в другом — подвес (свободное кольцо находится под неподвижным). В настоящее время явление магнитного подвеса при помощи левитации применяется многими компаниями при изготовлении вертикально-осевых ВЭУ. Например, ООО «Энергомир», Санкт-Петербург производят 2 и 5 кВт агрегаты. Ветрогенератор собирается с использованием редкоземельных неодимовых магнитов (NdFeB) и благодаря его многополюсности возможно выдавать номинальное напряжение на малых оборотах без использования мультипликатора. Кроме того, подобная конструкция предложена компанией MaglevWindTurbineTechnologies (MWTT) [12].
Подобным образом использование магнитной левитации в функционировании вертикально-осевых ВЭУ разрешает: исключить трение в опорных подшипниках и увеличить КПД ВЭУ, понизить момент инерции ВЭУ и сделать их самозапускаемыми уже при скоростях ветра 1,5–2 м/с, продлить срок службы генератора, снизить стоимость РКК энергии [11].
Литература:
- Кошелев А. А. О состоянии и перспективах альтернативной энергетики в России, или почему у нас пренебрегают «бесплатной» энергией солнышка, ветра и речек? // Экологический журнал «Волна». — 2006. — № 1(44). — С. 23–25.
- Schweitzer G., Maslen E. Magnetic Bearings: Theory, Design, and Application to Rotating Machinery// Berlin: Springer, 2009. — 535 с.
- Журавлев Ю. Н. Активные магнитные подшипники: Теория, расчет, применение// СПб.: Политехника, 2003. — 206 с.
- Альтман А. Б., ГербергА.Н., Гладышев П. А. и др. Постоянные магниты: справочник // под ред. Ю. М. Пятина. — 2-е изд., перераб. и доп. — М.: Энергия, 1980. — 488 с.
- Орлов П. И. Основы: справ.- метод. пособие: в 2 кн. //под ред. П. Н. Учаева. — Изд. 3-е, испр. — М.: Машиностроение, 1988. — Кн. 1. –560 с.
- Michael C., Weaire D. Magnets, Markets, and Magic Cylinders // The Industrial Physics. — 1998. –№. 4, (3). — С. 34–36.
- Транспорт с магнитным подвесом / Под ред. В. И. Бочарова, В. Д. Нагорского. — М.: Машиностроение, 1991. — 320 с.
- Mallinson John C. One Sided Fluxes — A Magnetic Curiosity // IEEE Transactions on Magnetics. — 1973. — №. 9, (4). — С. 678–682.
- Halbach Klaus. Design of Permanent Multipole Magnets with Oriented Rare Earth Cobalt Materials // Nuclear Instruments and Methods. — 1980. — №. 169, (1). — С. 1–10.
- Halbach Klaus. Application of Permanent Magnets in Accelerators and Electron Storage Rings // Journal of Applied Physics. — 1985. — №. 57, (1). — С. 3605–3608.
- Пархоменко Т. А. Применение магнитной левитации для разгрузки опорных подшипников вертикально-осевых ВУЭ// НАУ им. Жуковского «ХАИ». — 2011. — № 34. — C.6.
- Раздин Е. В. Ветрогенераторы нового поколения // Гидроэнергетика Украины. — 2008. — № 1. — С. 58–60.
- McCallum W., Kadin A. M., Clemente G. B., Keem J. E. High performance isotropic permanent magnet based on NdFeBR. //Appl. Phys.–1987. –61 с.
- Chan T. F., Wang W., Lai L. L. Performance of an Axial-Flux Permanent Magnet Synchronous Generator From 3-D Finite-Element Analysis // Energy Conversion IEEE Transactions on. — 2010. — №. 25. — С. 669–676.
Основные термины (генерируются автоматически): магнитное поле, магнит, магнитный модуль, постоянная, подвес, свободное кольцо, магнитный поток, магнитный подвес, алюминиевый сплав, верхняя платформа.
moluch.ru
