
Проверка схемы магнитного подвеса на постоянных магнитах
Ниже рассмотрена конструкция магнитного подвеса Николаева, который утверждал, что можно обеспечить левитацию постоянного магнита без упора. Показан опыт с проверкой работы данной схемы.
Сами неодимовые магниты продаются в этом китайском магазине.
Магнитная левитация без затрат энергии – фантастика или реальность? Можно ли сделать простейший магнитный подшипник? И что же на самом деле показал Николаев в начале 90-х? Давайте рассмотрим эти вопросы. Каждый, кто когда-либо держал в руках пару магнитов, наверняка задавался вопросом: “Почему не получается заставить один магнит парить над другим без посторонней поддержки? Обладая таким уникальным свойством, как постоянное магнитное поле, они отталкиваются одноименными полюсами совершенно без затрат энергии. Это великолепная основа для технического творчества! Но не все так просто.
Еще в 19 веке британский ученый Earnshaw доказал, что используя только постоянные магниты, невозможно устойчиво удерживать левитирующий объект в гравитационном поле. Частичная левитация или, иначе говоря, псевдолевитация, возможна лишь при механической поддержке.
Как сделать магнитный подвес?
Простейший магнитный подвес можно сделать за пару минут. Понадобятся 4 магнита в основании,чтобы сделать опорную базу, и пара магнитов, закрепленных на самом левитирующим объекте, в качестве которого можно взять, например, фломастер. Тем самым мы получили парящую конструкцию с неустойчивым равновесием по обе стороны оси фломастера. Стабилизировать положение поможет обычный механический упор.
 Простейший магнитный подвес с упором
Простейший магнитный подвес с упоромЭту конструкцию можно настроить таким образом, чтобы основной вес левитирующего объекта ложился на опорные магниты, а боковая сила упора была настолько мала, что механическое трение там практически стремится к нулю.
Теперь было бы логично попытаться заменить механический упор на магнитный, чтобы добиться абсолютной магнитной левитации. Но, к сожалению, сделать это не получается. Возможно, дело в примитивности конструкции.
Альтернативная конструкция.
Рассмотрим более надежную систему такого подвеса. В качестве статора используются кольцевые магниты, сквозь которые проходит ось вращения подшипника. Оказывается, в определенной точке кольцевые магниты обладают свойством стабилизировать другие магниты вдоль своей оси намагниченности. А в остальном имеем то же самое. Нет устойчивого равновесия вдоль оси вращения. Это и приходится устранять регулируемым упором.
Рассмотрим конструкцию более жесткую.
Возможно здесь удастся стабилизировать ось при помощи упорного магнита. Но и здесь так и не удалось добиться стабилизации. Возможно, упорные магниты нужно размещать с обеих сторон от оси вращения подшипника. В интернете давно обсуждается видео с магнитным подшипником Николаева. Качество изображения не позволяет детально рассмотреть эту конструкцию и складывается впечатление что ему удалось добиться устойчивой левитации исключительно при помощи постоянных магнитов. При этом схема устройства идентична показанной выше. Добавлены лишь второй магнитный упор.
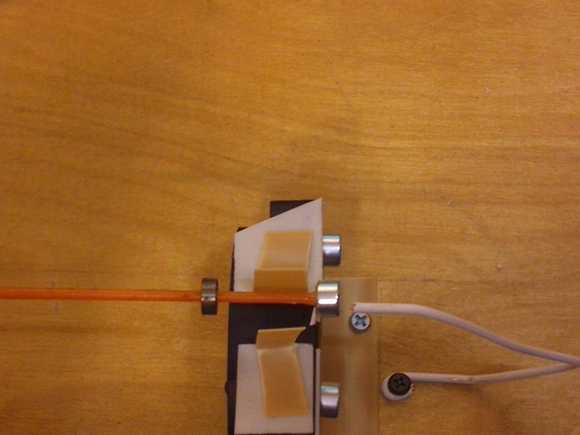
Проверка конструкции Геннадия Николаева.
Сначала посмотрите полное видео, на котором показан магнитный подвес Николаева. Этот ролик заставил сотни энтузиастов в России и за рубежом попытаться сделать конструкцию, которая смогла бы создать левитацию без упора. Но, к сожалению, в настоящее время не создана действующая конструкция такого подвеса. Это заставляет усомниться в модели Николаева.
Для проверки была сделана точно такая-же конструкция. Кроме всех дополнений были поставлены такие же, как у Николаева, ферритовые магниты. Они слабее неодимовых и не выталкивают с такой огромной силой. Но проверка в серии экспериментов принесла только разочарование. К сожалению, и эта схема оказалась нестабильной.
Заключение.
Проблема в том что кольцевые магниты, какими бы сильными они не были, не в состоянии удержать ось подшипников в равновесии при том усилии со стороны боковых упорных магнитов, которое нужно для ее боковой стабилизации. Ось просто соскальзывают в сторону при малейшем движении. Другими словами, сила, с которой кольцевые магниты стабилизируют ось внутри себя, всегда будет меньше силы, необходимой для стабилизации оси в боковом направлении.
Так что же все-таки показал Николаев? Если более внимательно посмотреть это видео, то возникает подозрение, что при плохом качестве видео просто не видно игольчатый упор. Случайно ли Николаев не старается демонстрировать самое интересное? Не отвергается сама возможность абсолютной левитация на постоянных магнитах, закон сохранения энергии здесь не нарушается. Возможно, еще не создали такую форму магнита, которая создаст необходимую потенциальную яму, надежно удерживающую связку других магнитов в устойчивом равновесии.
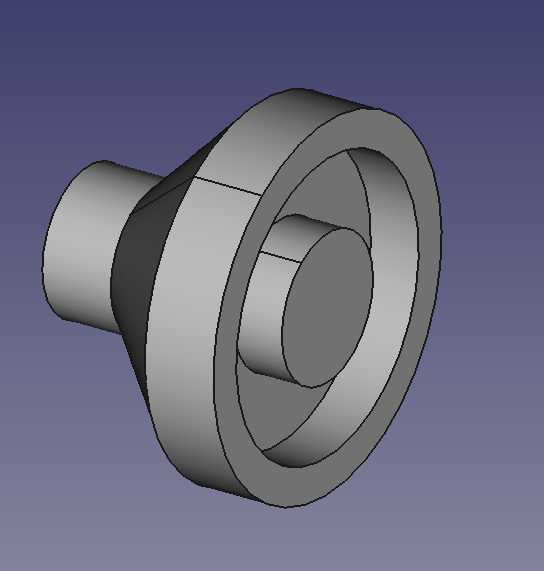
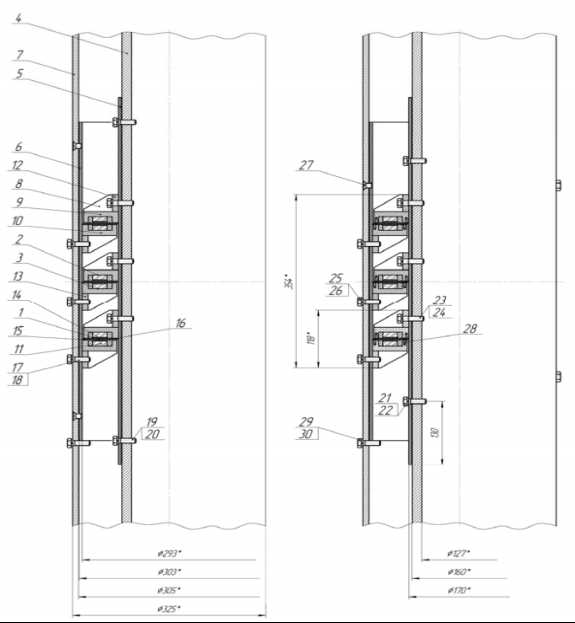
Далее схема магнитного подвеса
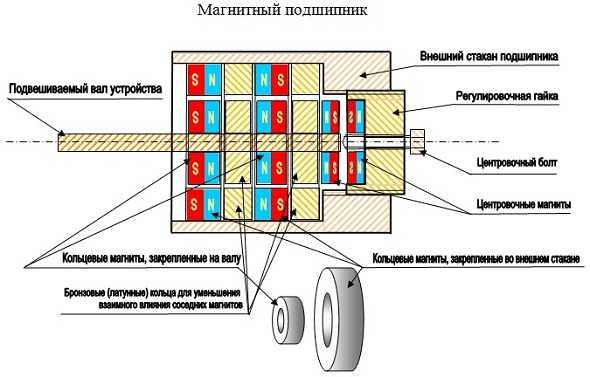 Чертеж магнитного подвеса на постоянных магнитах
Чертеж магнитного подвеса на постоянных магнитах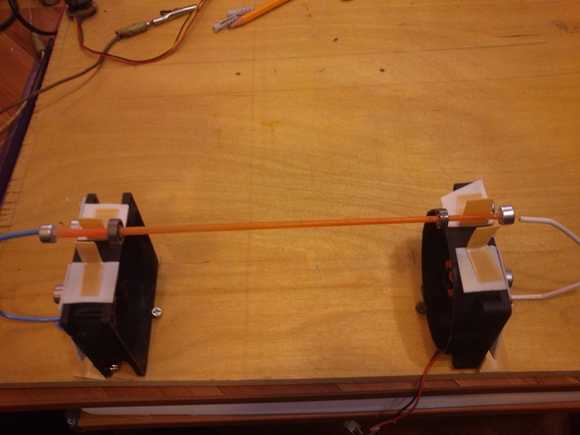


Использованы материалы с сайтов youtube.com и форума matri-x.ru
izobreteniya.net
МАГНИТНЫЙ ПОДВЕС • Большая российская энциклопедия
В книжной версии
Том 18. Москва, 2011, стр. 383
Скопировать библиографическую ссылку:
Авторы: И. П. Киселёв
МАГНИ́ТНЫЙ ПОДВЕ́С (магнитное подвешивание), бесконтактное подвешивание, обеспечивающее действие транспортного средства и его передвижение вдоль путепровода. Осуществляется в результате взаимодействия магнитных полей, создаваемых на ходовой части транспортного средства и в путевой структуре. Для прокладки пути строят спец. путевую структуру, в которой укладывается развёрнутая обмотка линейного электродвигателя. Для поездов с М. п. путепровод прокладывается по поверхности земли или на эстакадах. Источником магнитных полей могут быть постоянные магниты, удерживающие транспортное средство над путепроводом благодаря силам отталкивания, возникающим между одноим. полюсами магнитов, расположенных на подвижном составе и в путепроводе. При отталкивании создаётся зазор, т. н. возд. подушка, на которую как бы опирается поезд. При применении электромагнитов, закреплённых на подвижном составе и в направляющем рельсе, расположенном под эстакадой, в результате взаимодействия магнитных полей поезд удерживается и двигается под путепроводом, находясь в подвешенном состоянии. Зазор между путепроводом и ходовой частью поезда составляет от 10 до 300 мм, зависит от источника магнитного поля и направления взаимодействующих сил. В этих системах возможно также использование сверхпроводящих магнитов. В поездах с М. п. отсутствуют вращающиеся части и механич. передачи, что делает их надёжными в эксплуатации, повышает кпд и увеличивает ресурс работы. Такие системы, называемые левитирующими (парящими), могут обеспечивать скоростное движение поездов (см. Высокоскоростной наземный транспорт). Одной из перспективных считается система левитирующего транспорта «маглев» (от англ. magnetic levitation – поезд на магнитном подвесе, движимый и управляемый магнитными силами), которая работает почти бесшумно, является наиболее экологически чистой. Существуют проекты с расположением элементов дороги между рельсами обычного ж.-д. пути. Разработки левитирующих транспортных средств ведутся в ряде стран (Япония, США) с 1960-х гг. В 2007 опытная левитирующая платформа на испытаниях в Калифорнии (США) достигла скорости 500 км/ч.
bigenc.ru
Магнитный подшипник
Магнитный подшипник, как и остальные механизмы подшипниковой группы, служит опорой для вращающегося вала. Но в отличие от распространенных подшипников качения и подшипников скольжения соединение с валом является механически бесконтактным, то есть используется принцип левитации.
Магнитный подвес
Классификация и принцип работы
Используя принцип левитации, вращающийся вал буквально парит в мощном магнитном поле. Контролировать движение вала и координировать работу магнитной установки позволяет сложная система датчиков, которая постоянно отслеживает состояние системы и подает необходимые управляющие сигналы, меняя силу притяжения с той или иной стороны.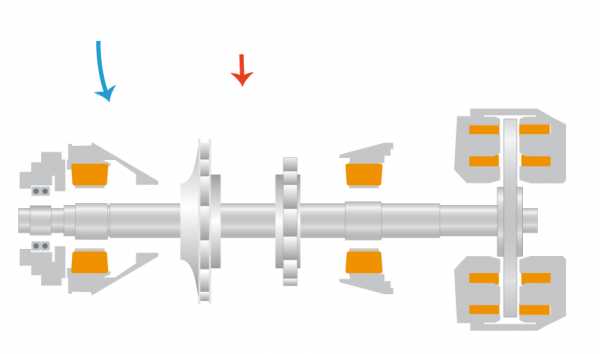
Принцип работы
Магнитные подшипники делятся на две большие группы – активные и пассивные. Более подробно об устройстве каждого типа подшипника ниже.- Активные магнитные подшипники.
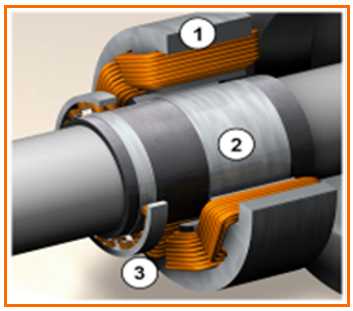
Устройство активного магнитного подвеса
1, 3 – силовые катушки; 2 — вал Различают радиальный и упорные механизмы (по типу воспринимаемой нагрузки), но принцип работы у них один и тот же. Используется специальный ротор (обычный вал не подойдет), модифицированный ферромагнитными блоками. Этот ротор «висит» в магнитном поле, создаваемом электромагнитными катушками, которые находятся на статоре, то есть вокруг вала на 360 градусов, образуя кольцо.Между ротором и статором образуется воздушный зазор, что позволяет деталям вращаться с минимальным трением.
Система в разрезе
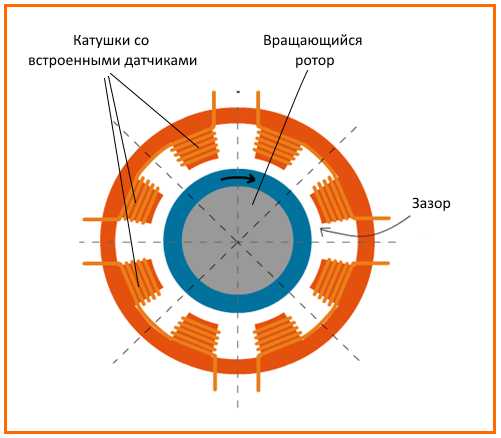
Изображенным механизмом управляет специальная электронная система, которая с помощью датчиков постоянно отслеживает положение ротора относительно катушек и при малейшем его смещении подает управляющий ток на соответствующую катушку. Это позволяет поддерживать ротор в одном и том же положении.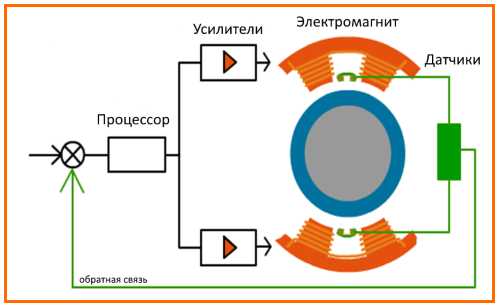
Устройство электронной системы управления.
Расчет таких системы можно более детально изучить в приложенной документации.- Пассивные магнитные подшипники.
Пассивный МП
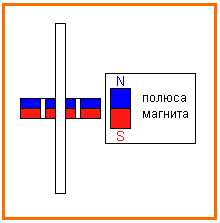
Ротор оснащен постоянным магнитом так же, как и статор, расположенный кольцом вокруг ротора. Одноименные полюса расположены рядом в радиальном направлении, что создает эффект левитации вала. Подобную систему можно даже собрать своими руками.Преимущества
Разумеется, основным преимуществом является отсутствие механического взаимодействия между вращающимся ротором и статором (кольцом).Из этого следует, что подобные подшипники очень долговечны, то есть обладают повышенной износоустойчивостью. Также конструкция механизма позволяет использовать его в агрессивных средах – повышенная/пониженная температура, агрессивная воздушная среда. Поэтому МП находят все большее применение в космической промышленности.
Недостатки
К сожалению, система обладает и большим количеством недостатков. К ним относятся:- Сложность управления активными подвесами. Необходима сложная, дорогостоящая электронная система управления подвесом. Ее использование может быть оправдано только в «дорогих» отраслях – космической и военной.
- Необходимость использования страховочных подшипников. Резкое отключение электричества или выход из строя магнитной катушки может привести к катастрофическим последствиям для всей механической системы. Поэтому для страховки совместно с магнитными используют и механические подшипники. В случае отказа основных, они смогут взять на себя нагрузки и избежать серьезной поломки.
- Нагрев обмотки катушек. Вследствие прохождения тока, создающего магнитное поле, обмотка катушек нагревается, что зачастую является неблагоприятным фактором. Поэтому необходимо использовать специальные охлаждающие установки, что еще больше увеличивает стоимость использования подвеса.
Области применения
Возможность работы при любых температурах, в условиях вакуума и отсутствия смазки позволяет использовать подвесы в космической промышленности, в станках нефтеперерабатывающей промышленности. Также они нашли свое применение в газовых центрифугах для обогащения урана. Различные электростанции также используют магнитные подвесы в своих генерирующих установках.
Вариант исполнения подвеса
Ниже несколько интересных видео по теме.Не забудь сохранить статью!
podshipnikcentr.ru
Активный магнитный подшипник
Всем известно, что магниты имеют свойство притягивать металлы. Также один магнит может притянуть другой. Но взаимодействие между ними не ограничено лишь притяжением, они могут отталкивать друг друга. Дело в полюсах магнита – разноименные полюса притягиваются, одноименные – отталкиваются. Это свойство положено в основу всех электродвигателей, и довольно мощных.
Также существует такое понятие, как левитация под действием магнитного поля, когда помещенный над магнитом предмет (имеющий сходный с ним полюс) зависает в пространстве. Этот эффект был применен на практике в так называемом магнитном подшипнике.
Что представляет собой магнитный подшипник
Устройство электромагнитного типа, в котором вращающийся вал (ротор) поддерживается в неподвижной части (статоре) силами магнитного потока, называется подшипником магнитным. Когда механизм находится в работе, на него оказывают влияние физические силы, стремящиеся сместить ось. Чтобы их преодолеть, магнитный подшипник оснастили системой контроля, которая следит за нагрузкой и подает сигнал управления силой магнитного потока. Магниты, в свою очередь, сильнее или слабее воздействует на ротор, сохраняя его в центральном положении.
Магнитный подшипник нашел широкое применение в промышленности. Это в основном мощные турбомашины. Благодаря отсутствию трения и, соответственно, необходимости применять смазочные материалы, во много раз повышается надежность машин. Износ узлов практически не наблюдается. Также повышается качество динамических характеристик и возрастает КПД.
Активные магнитные подшипники
Подшипник магнитный, где силовое поле создается при помощи электромагнитов, называется активным. Электромагниты позиционные расположены в статоре подшипника, ротор представлен металлическим валом. Вся система, обеспечивающая удержание вала в агрегате, называется активным магнитным подвесом (АМП). Он имеет сложное строение и состоит из двух частей:
- блока подшипников;
- системы электронного управления.
Основные элементы АМП
- Подшипник радиальный. Устройство, которое имеет электромагниты на статоре. Они удерживают ротор. На роторе имеются специальные пластины из ферромагнита. При подвешивании ротора в средней точке отсутствует его контакт со статором. Индуктивные датчики отслеживают малейшее отклонение положения ротора в пространстве от номинального. Сигналы от них управляют силой магнитов в той или иной точке для восстановления равновесия в системе. Зазор радиальный составляет 0.50-1.00 мм, осевой – 0.60-1.80 мм.
- Магнитный подшипник упорный работает таким же образом, как и радиальный. На валу ротора закреплен упорный диск, по обе стороны которого располагаются электромагниты, закрепленные на статоре.
- Подшипники страховочные предназначены для удержания ротора, когда устройство находится в выключенном состоянии либо в аварийных ситуациях. В процессе работы вспомогательные магнитные подшипники не задействованы. Зазор между ними и валом ротора в два раза меньше, чем у магнитного подшипника. Страховочные элементы собраны на базе шариковых устройств либо подшипников скольжения.
- Электроника управления включает в себя датчики положения вала ротора, преобразователи и усилители. Вся система работает по принципу регулировки магнитного потока в каждом отдельном модуле электромагнита.
Пассивные подшипники магнитного типа
Магнитные подшипники на постоянных магнитах – это системы удержания вала ротора, в которых не используется схема управления, включающая обратную связь. Левитация осуществляется только за счет сил высокоэнергетических постоянных магнитов.
Недостатком такого подвеса является необходимость использования механического упора, что приводит к образованию трения и снижению надежности системы. Магнитный упор в техническом смысле еще не реализован в этой схеме. Поэтому на практике пассивный подшипник применяют нечасто. Есть запатентованная модель, например подвес Николаева, которую пока не удалось повторить.
Магнитная лента в ступичном подшипнике
Понятие “магнитный ступичный подшипник” относится к системе ASB, которая широко используется в современных автомобилях. Подшипник ASB отличается тем, что внутри имеет встроенный датчик скорости вращения колеса. Этот датчик является активным устройством, внедренным в прокладку подшипника. Он построен на базе магнитного кольца, на котором чередуются полюсы элемента, считывающего изменение магнитного потока.
Когда подшипник вращается, происходит постоянное изменение магнитного поля, создаваемого магнитным кольцом. Датчик проводит регистрацию этого изменения, формируя сигнал. Далее сигнал попадает в микропроцессор. Благодаря нему работают такие системы, как ABS и ESP. Уже они корректируют работу автомобиля. ESP отвечает за электронную стабилизацию, ABS регулирует вращение колес, уровень давления в системе – тормозной. Он следит за работой рулевой системы, ускорением в боковом направлении, а также корректирует работу трансмиссии и двигателя.

Главным плюсом подшипника ASB является возможность контролировать скорость вращения даже при очень низких оборотах. При этом массогабаритные показатели ступицы улучшаются, монтаж подшипника упрощается.
Как сделать подшипник магнитный
Простейший магнитный подшипник своими руками сделать несложно. Он не подойдет для практического применения, зато наглядно покажет возможности магнитной силы. Для этого понадобятся четыре неодимовых магнита одного диаметра, два магнита чуть меньшего диаметра, вал, например отрезок пластиковой трубки, и упор, например стеклянная пол-литровая банка. Магниты меньшего диаметра с помощью термоклея крепят к торцам трубки таким образом, чтобы получилась как бы катушка. Посередине одного из этих магнитов снаружи приклеивают пластиковый шарик. Одинаковые полюса должны смотреть наружу. Четыре магнита такими же полюсами вверх раскладывают попарно на расстоянии длины отрезка трубки. Ротор располагают над лежащими магнитами и с той стороны, где приклеен пластиковый шарик, подпирают его пластиковой банкой. Вот магнитный подшипник и готов.
fb.ru
Магнитный подшипник на постоянных магнитах.: afhh723 — LiveJournal
насмотревшись видео отдельных товарищей, типа таких
решил и я отметится в этой теме. на мой взгляд видео довольно безграмотное, так что вполне можно по-свистеть из партера.
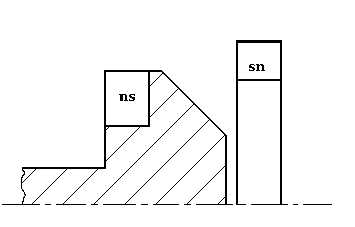
перебрав в голове кучу схем, посмотрев принцип подвеса в центральной части в видео Белецкого, поняв как работает игрушка “левитрнон”, пришел к простой схеме. понятно, что опорных шипа должно быть два на одной оси, сам шип выполнен из стали, а кольца жестко на оси зафиксированны. вместо цельных колец вполне можно уложить не очень большие магниты в форме призмы или цилиндра расположенные по окружности. принцип такойже как в известной игрушке “ливитрон”. только вместо героскопического момента, который не дает волчку опрокинутся мы используем “распор” между жестко закрепленными на оси подставками.
ниже видео с игрушкой “ливитрон”
а здесь схема которую предлагаю я. по сути это и есть игрушка на видео выше, но как я уже говорил, ей необходимо что-то что не довало бы опорному шипу опрокинутся. в видео выше используется гироскопический момент, я использую две подставки и распор между ними.

попробуем обосновать работу это конструкции, как я её вижу:
магниты отатлкиваются, значит слабое место – нужно стабилизировать эти шипы по оси. здесь я использовал такую идею: магнит пытается вытолкнуть шип в зону с наименьшей напряженностью поля, т.к. шип имеет противоположную кольцу намагниченость и сам магнит кольцевой, где в достаточно большой области, расположенной вдоль оси, напряженность меньше чем на переферии. т.е. распределение напряженности магнитного поля по-форме напомянает стакан – в стенке напряженность максимальна, а на оси минимальна.
шип должен стабилизироваться по оси, с одновременным выталкиванием из кольцевого магнита в зону с наименьшей напряженностью поля. т.е. если таких шипа два на одной оси и кольцевые магниты жестко зафиксированны – ось должна “зависнуть”.
получается, что находится в зоне с меньшей напряженностью поля наиболее энергетически выгодно.
думаю автор этой картинки в рассуждения особо не вдовался и сделал все “по-понятиям”:
порывшись еще в интернете нашел похожую конструкцию:
здесь тоже формируется зона с меньшей напряженностью, находится она тоже по оси между магнитами, так же используется угол. в общем идеалогия очень похожая, однако если говрить о компактном подшипнике – вариант выше выглядит лучше, однако требует магнитов специальной формы. т.е. разница между схемами в том, что я выдавливаю в зону с меньшей напряженностью опорную часть, а в схеме выше само формирование такой зоны обеспечивает положение на оси.
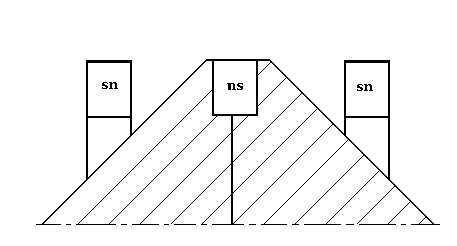
для наглядности сравнения я перерисовал свою схему:
по сути они зеркальны. вообще идея не нова – все они крутятся вокруг одного и того же, у меня даже есть подозрения, что автор ролика выше просто не искакал предполагаемых решений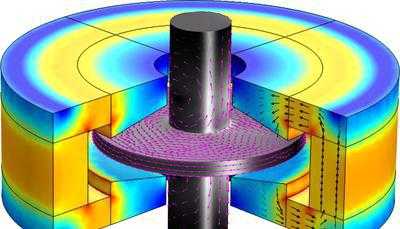
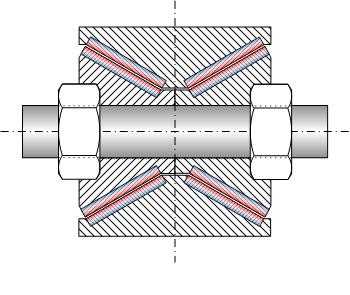
здесь практически один в один, если конические упоры сделать не цельным, а составными – магнитопровод + кольцевой магнит, то получится моя схема. я бы даже сказал начальная неоптимизированная идея – рисунок ниже. только рисунок выше работает на “притяжение” ротора, а я изначально планировал “отталкивание”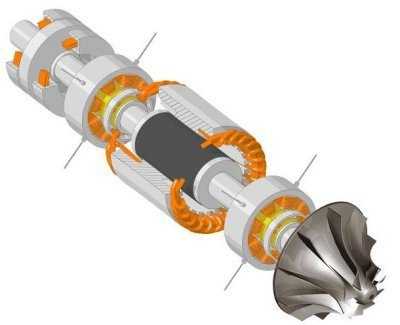
для особо одаренных хочу заметить, данный подвес не нарушает теоремы (запрет) Ирншоу. дело в том что речь идет здесь не о чисто магнитном подвесе, без жесткой фиксации центров на оси т.е. одна ось жестко зафиксирована, ничего работать не будет. т.е. речь идет о выборе точки опоры и не более того.
на всамом деле, если посмотреть видео Белецкого, то там видно, что примерно такая конфигурация полей уже используется где не поподя, не хватает только финального штриха. конический магнитопровод распределяет “отталкивание” по двум осям, третью же ось Ирншоу велел зафиксировать иначе, я не стал спорить и жестко её зафиксировал механически. почему Белецкий не попробывал такой вариант я не знаю. фактически ему нужно два “ливитрона” – подставки зафиксировать на оси, а на волчки соединить медной трубкой.
еще можно заметить, что можно использовать наконечники из любого дастаточно сильного диамегнетика в место магнита полярности противоположной магнитному опорному кольцу. т.е. заменить связку магнит+конический магнитопровод, просто на конус из диамагнетика. фиксация на оси будет более надежной, но диамагнетики не отличаются сильным взаимодействием и нужны большие напряженности поля и большой “объем” этого поля, чтобы применять это хоть как-то. за счет того что поле аксильно равномерное относительно оси вращения, изменения магнитного поля происходить при вращении не будет т.е. подобный подшипник не создаёт противодействия вращению.
по логике вещей такой принцип должен быть применим и для подвески плазмы – пропатченная “магнитная бутылка” (пробкотрон), что же поживем – увидем.
почему я так уверен в результате? ну потому что его не может не быть 🙂 единственно что возможно придется сделать магнитопроводы в форме конуса и чашки для более “жесткой” конфигурации поля.
ну и такжк можно найти видео с подобным подвесом:
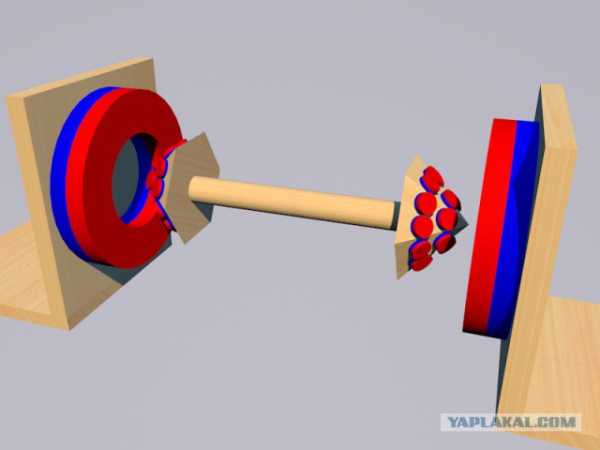
здесь автор не использует каких-либо магнитопроводов и использует упор на иглу, как в общем-то и нужно, понимая теорему Ирншоу. но ведь кольца уже жестко закреплены на оси, значит можно распереть ось между ними, чего лего добится используя конические магнитопроводы на магнитах на оси. т.е. пока не пробили “дно” “магнитного стакана” магнитопровод все труднее впихнуть в кольцо т.к. магнитная проницаемость воздуха меньше чем магнитопровода – уменьшение воздушной прослойки приведет к возрастанию напряженности поля. т.е. одна ось жестко закреплена механически – тогда опор на иглу будет не нужен. т.е. см. самый первый рисунок.
P.S.
вот чего нашел. из сери дурная голова рукам покая не дает – автор тот еще белецкий – накручено там мама не горюй – конфигурация поля довольно сложная, более того не однородная по оси вращения т.е. при вращении буде изменение пока магнитной индукции в оси со всеми вытикающими… обратите внимание на шарик в кольцевом магните, с другой же стороны в кольцевом магните цилиндр. т.е. человек тупо испохабил принцип подвеса описанный здесь.
ну или пропаичил подвес на фотографии т.е. перцы на фото используют опор на иглу, а он в место иглы повесил шарик – ай шайтан – сработало – кто бы мог подумать (помню мне доказывали что я не правильно понимаю теорему Ирншоу), однако ума повесить два шарика и использовать всего два кольца видимо не хватает. т.е. количество магнитов в устройстве на видео можно легко сократить до 4-х, а возможно до 3-х т.е. конфигурацию с цилиндром в одном кольце и шариком в другом можно считать экспериментально доказаной работающей см. рисунок изначальной идеи. там я использовал два симитричных упора и цилинд + конус, хотя считаю что конус что часть сферы от полюса до диаметра работают одинакого.
стало быть сам упор выглядит так – это магнитопровод (т.е железный, никелевый и т.п.)в него просто
закладывается магнит-кольцо. ответнаая часть такая же, только наоборот 🙂 и работают два упора в распоре- товарищ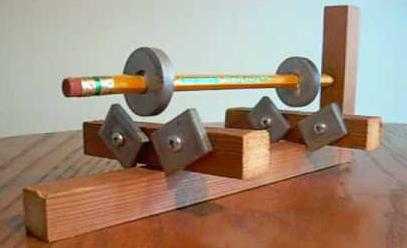 Ирншоу запретил рабоать по одному упору.
Ирншоу запретил рабоать по одному упору.
afhh723.livejournal.com
Магнитные подшипники | общая характеристика, достоинства и недостатки, использование магнитных подшипников
 Достоинства и недостатки магнитных подшипников
Достоинства и недостатки магнитных подшипников
Магнитный подшипник (подвес) работает, основываясь на принципе левитации. Левитация создается магнитным и электрическим полем.
Магнитные подшипники осуществляют работу вала, его вращение, без физического контакта с какой-либо поверхностью.
Это позволяет полностью исключить систему смазки из работы данного механизма. Фактор отсутствия износа и трения, является основным достоинством данных подшипников.
Помимо этого качества, специалисты также оценивают и тот факт, что электромагнитные подшипники позволяют контролировать ротор. Магнитные подшипники бывают активными и пассивными.
Пассивные магнитные подшипники – это подшипники с постоянным магнитом. В силу технологического несовершенства на практике применяются редко.
Активные магнитные подшипники – это подшипники с переменным магнитным полем, то есть с полем создаваемым сердечником и обмоткой.
Общая характеристика магнитных подшипников
В активных магнитных подшипниках (АМП), ток в электромагнитах регулируется системой автоматического управления, которая получает сигналы от датчиков перемещения ротора. Обычно бесконтактный подвес ротора осуществляется с помощью либо двух конических, либо с помощью двух радиальных и одного осевого активного магнитного подшипника. Системы управления работают как на аналоговой, так и на более современной цифровой обработке сигналов.
К выделяющим их из ряда аналогов качествам, можно отнести следующие преимущества:
- Являются механически прочными.
- Обладают достаточно высокой грузоподъемностью.
- В широких диапазонах можно изменить демпфирование и жесткость.
- Конструкция подшипников позволяет использовать их в особых условиях (при низких и высоких температурах, в вакууме, при больших скоростях вращения, а также в стерильных условиях).
- Конструкция обеспечивает устойчивую неконтактную подвеску тела.
Однако помимо достоинств, у магнитных подшипников есть и свои недостатки. Во-первых, это нуждаемость магнитных подшипников во вспомогательных подшипниках. Обычно для этой цели используют подшипники качения. Вспомогательные подшипники используют в качестве страховочных для случая, если вдруг пропадет, по техническим причинам, магнитное поле. Поскольку в таком случае, если не будет страховочных подшипников, то потеря управления над ротором может повлечь за собой очень серьезные последствия.
Начиная от повреждения обмоток подшипника и заканчивая выводом из строя устройств находящихся внутри корпуса. Поэтому в магнитных подшипниках всегда предусмотрена такая система подшипников качения, которая выполняет защитную функцию и способна выдержать 1-2 отказа магнитных подшипников, после чего требуется их замена.
Во-вторых, это внутренняя неустойчивость магнитного поля. Для устранения этой неустойчивости, которая заключается в стабильном удерживании ротора магнитным полем, применяются специальные системы управления. Их устройство очень сложное и имеет в своем составе конструктивно слабые механизмы для исправления неполадок. В связи с этим, данную внутреннюю неустойчивость принято, в основном, ликвидировать вспомогательными подшипниками.
Третьим недостатком можно назвать повышенную температуру обмотки подшипника. Часто бывает так, что для лучшего контроля работы ротора необходим дополнительный ток. Тем самым повышенная сила тока, повышает температуру обмотки. А, как известно чем выше температура проводника, тем большее сопротивление он имеет.
Таким образом, температура обмотки увеличивается с каждым циклом, и избежать этого или отвести как-то тепло от отмотки, включив в конструкцию подшипника какой-либо элемент для этого, не представляется возможным. Единственное решение – это снабжение магнитного подшипника отдельной жидкостной системой охлаждения.
И последним весомым недостатком магнитного подшипника является его металлоемкость. Для того чтобы максимально преобразовать электрический ток в поддерживающую ротор магнитную силу, необходимо создание большой несущей поверхности и значительной силы тока. Это достигается путем увеличения сердечника. Помимо того что это вызывает падение резонансной частоты всей динамической системы ротора, это еще и влечет за собой увеличение массы подшипника в целом.
Кроме того, во многих магнитных подшипниках возможно явление насыщения. Это явление наблюдается, когда дополнительный ток перестает превращаться в дополнительную магнитную силу, вследствие чего подшипник уже не обладает необходимой силой для поддержания ротора. Это явление возникает вследствие появления токов Фуко в обмотке магнита. В зависимости от частоты вращения, потери на токи Фуко меняются.
| Потери на токи Фуко, Нм | 0,14 | 0,27 | 0,39 | 0,52 |
| Частота вращения, 1/мин | 1000 | 2000 | 3000 | 4000 |
Магнитные подшипники используются в таких системах как:
- Электрогенераторы высокоскоростные.
- Измерительные и контрольные приборы.
- Станки (шлифовальные, фрезерные, полировальные) с частотой вращения вала до 100000 об./мин.
- Высокотехнологичное оборудование для физических лабораторий.
- Криогенная техника.
- Вакуумные установки.
В настоящее время использование магнитных подшипников, наиболее перспективно в лазерных системах и оптике высокой точности. Ведущие компании по производству магнитных подшипников успешно работают над их разработкой уже с середины 50-х годов прошлого столетия.
myfta.ru
Использование магнитных подвесов в ветроэнергетических установках
Библиографическое описание:
Скороходов В. И., Шкандюк Д. О., Киселёв Г. Ю., Жиленко Д. М. Использование магнитных подвесов в ветроэнергетических установках // Молодой ученый. 2016. №28.2. С. 79-81. URL https://moluch.ru/archive/132/36971/ (дата обращения: 08.08.2019).
В статье рассмотрены основные проблемы ветроэлектрических установок (ВЭУ) и применение магнитолевитации, магнитных подвесов, для решения некоторых из них. Рассмотрены виды магнитных подвесов и их преимущества и недостатки.
Ключевые слова: энергосбережение, ветроэлектрические установки, ВЭУ, вертикально осевые, горизонтально осевые, магнитолевитация.
По мере развития человечеством науки и техники, разработкой новых устройств и увеличения количества потребителей возрастает необходимость в качественных и недорогих источниках энергии. Так же сейчас очень важным стал вопрос экологической чистоты вырабатываемой энергии, что привлекло особое внимание к нетрадиционной энергетике, энергетике, основанной на использовании возобновляемых источников энергии. Очень популярным направлением сейчас является развитие одного из направлений нетрадиционной энергетики – ветроэнергетических установок (ВЭУ) [1].
Сегодня ВЭУ подразделяются на 2 типа [1]:
1) ВЭУ с горизонтальной осью вращения – ротор располагается в сторону ветрового потока. Что является основной проблемой, так как даже лучшим устройствам, в своем роде, необходимо слишком много времени, чтобы приспособиться к изменению направления ветра [2-3].
2) ВЭУ с вертикальной (ортогональной) осью вращения – ротор расположен перпендикулярно потоку ветра. Главным преимуществом таких установок является отсутствие необходимости ориентации на ветряной поток. Такие установки способны работать даже при малых скоростях ветра, но имеют малых КПД. Однако такие установки имеют и ряд проблем [2-3].
Во-первых, с ростом габаритных размеров установки растет и сила, которую необходимо приложить, чтобы установка вошла в рабочий режим [4]. Отсюда вытекает и вторая проблема, растет нагрузка на опорные подшипники, что ведет к растрате энергии, а иногда даже к выходу ВЭУ из строя.
Решение проблемы
Решением обеих проблем является использование явления магнитной левитации. Магнитные подвесы могут полностью избавить нас от необходимости использования опорных подшипников. Технология магнитных подвесов основывается на достижениях в области электромагнетизма, обработки сигналов, статики и динами и развивалась вмести с ними. Эта технология основана на силах взаимного отталкивания(притяжения) магнитных полей благодаря чему в этих подшипниках исключается механический контакт, что является его главным преимуществом увеличивая срок службы, уменьшая потери мощности. Таким образом, эти подвесы находят широкое применение во многих областях и устройствах где нужно уменьшить механическое воздействие между быстро движущимися частями [2].
Так многие страны уже широко используют их для создания скоростных поездов (скорость которых может достигать 500 км/ч). Это такие страны как: Германия, Япония, Китай. Так же эта технология используется в аэрокосмической отрасли. Лучших результатов здесь добились в США и Японии. В США с помощью магнитных подшипников разработали искусственный сердечный насос. В энергетике эти подвесы используются для уменьшения трения, шума, потерь и пускового момента, что позволяет получать энергию при меньшей скорости ветра (относительно обычных подшипников) уменьшая время простоя ветрогенератора.
В зависимости от места применения используют:
– Электромагнитный подвес(ЭМП) используется ЭМ с изменяемой магнитодвижущей силой взаимодействующий с непрерывным феррорельсом.
– Электродвижущий подвес (ЭДП) их действие опирается на явление отталкивания источника магнитного поля и проводником, при их взаимном движении. Магнитное поле – управляемо. Система контролирует положение ротора и регулирует его подвеску.
– Подвес на постоянных магнитах (ППМ) наиболее прост, по своей конструкции, и экономичен. Он не нуждается в дополнительных источниках энергии для создания магнитного поля, имеет низкие потери мощности. Минусом такого подшипника является низкая грузоподъёмность.
В общем, выбор и сравнение магнитных подвесов в основном проводят по оценке их левитационного качества вычисляемого по формуле:
(1)
где Fпр– сила притяжения,Fот – сила отталкивания,Fт – сила торможения,Fп – подъемная сила, Fр – результирующая сила. Подробнее об оценке левитационных качеств магнитных подвесов можно узнать из работы LiuShuqin [2].
Главной проблемой создания неконтактных подвесов является обеспечение устойчивости движения вывешенного тела. Из истории развития магнитных подвесов – зачастую они были неработоспособными по причине возникновения вихревых токов в материале вращающегося тела. Тогда возникла необходимость изучения влияния магнитного трения на устойчивость вращающегося ферромагнитного тела [7]. Исследования показали, что причиной неустойчивости являются силы, лежащие в плоскости, перпендикулярной оси симметрии поля и направленные перпендикулярно вектору смещения центра масс относительно оси подвеса. Такая же проблема возникла в электрических машинах, тогда В. В. Болотин показал, что в уравнениях возмущенного движения появляются циркуляционные (псевдогироскопические) силы. Проблема устойчивости прямолинейного движения возникает при создании высокоскоростного транспорта с электродинамическим подвесом.
Дальнейшие работы по увеличению точности устройств и улучшение устройств с неконтактным подвесом требуют учета гистерезисных явлений. Сейчас в приборах с магнитными подвесами используют либо ферромагнитные материалы, имеющие высоким удельным сопротивлением, либо шихтованные материалы для валов магнитных подшипников и для высокоскоростного наземного транспорта с неконтактными подвесами. В этих материалах гистерезисные потери могут превышать потери на вихревые токи. Нахождение этих величин и учет влияния на динамику объекта становится важным звеном инженерных расчетов [7].
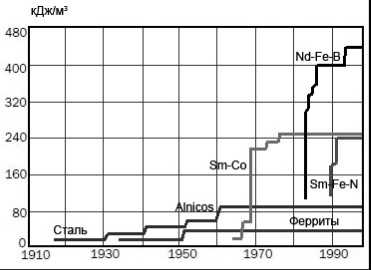
На данный момент основные исследования применения магнитных сосредоточены на горизонтально осевых ВЭУ [2] для них популярным являются ППМ. Их как правило изготавливают из NdFeb (неодим-железо-бор) это лучший выбор благодаря высокой величине магнитного поля и низкой цене.
Заключение
В итоге, магнитные повесы являются качественной заменой опорных подшипников, давая ВЭУ множество плюсов и ликвидируя некоторые её минусы:
1) ЭМП уменьшают скорость запуска ВЭУ и время вхождения в рабочий режим.
2) При применении ЭМП, благодаря магнитной подушке, уменьшает трение, вследствие чего увеличивается КПД ВЭУ.
3) При уменьшении трения возрастает срок службы установки.
Литература:
- Бубенчиков А.А., Артамонова Е.Ю., Дайчман Р.А., Файфер Л.А., Катеров Ф.В., Бубенчикова А.А. Применение ветроэергетических установок с концентраторами ветровой энергии в регионах с малой ветровой нагрузкой // Международный научно-исследовательский журнал. — 2015. — № 5-2 (36). — С. 31-35.
- Бубенчиков А.А., Артамонова Е.Ю., Дайчман Р.А., Файфер Л.А., Катеров Ф.В., Бубенчикова Т.В. Применение ветроколес и генераторов для ветроэнергетических установок малой мощности // Международный научно-исследовательский журнал. — 2015. — № 5-2 (36). — С. 35-39.
- Бубенчиков А.А., Артамонова Е.Ю., Р.А. Дайчман Р.А., Файфер Л.А., Катеров Ф.В., Бубенчикова Т.В. Проблемы применения ветроэнергетических установок в регионах с малой ветровой нагрузкой // Международный научно-исследовательский журнал. — 2015. — № 5-2 (36). — С. 39-43.
- Пархоменко Т. А. Параметры, повышающие эффективность работы вертикально-осевой ветроэнергетической установки / Т.А. Пархоменко. // Национальный аэрокосмический университет им. Н.Е. Жуковского «ХАИ». – 2011. – №10(87). – С. 54-57.
- Козорез В.В. Динамические системы магнитновзаимодействующих свободных тел / В. В. Козорез. – К.: Наук. думка, 1981. – 140 с.
- Писаревский Ю. В. Разработка магнитных левитационных подшипниковых узлов для использования в вертикально-осевых ветроэнергетических установках малой мощности / Ю. В. Писаревский, П. Ю. Беляков, А. Ю. Писаревский и др. // Электротехнические комплексы и системы управления. — 2014. — №3. — С. 53-56.
- Влияние магнитного трения на динамику твердого тела в неконтактном подвесе [Электронный ресурс] // Научная библиотека диссертаций и авторефератов disserCat. – URL: http://www.dissercat.com/content/vliyanie-magnitnogo-treniya-na-dinamiku-tverdogo-tela-v-nekontaktnom-podvese (дата обращения: 13.11.2016)
- Chaware K. D. Experimental Investigation of Windmill to Generate Electric Power using Magnetic Levitation: A Review / K.D. Chaware, Dr. P. V. Washimkar, N.N. Wadaskar // International Advanced Research Journal in Science, Engineering and Technology. — 2016. — №3. — С. 40-42.
- Поляхов Н. Д. Обзор способов практического применения активных магнитных подшипников / Н. Д. Поляхов, А. Д. Стоцкая. // Научное приборостроение. Т.22.— 2012. — №4. — С. 5-18.
Основные термины (генерируются автоматически): магнитное поле, подвес, подшипник, главное преимущество, уменьшение трения, США, рабочий режим, потеря мощности, нетрадиционная энергетика, Япония.
moluch.ru
