
AVR микроконтроллеры: популярное семейство
Семейство AVR – включает в себя 8 битные микроконтроллеры для широкого спектра задач. Для сложных проектов с большим количеством входов/выходов вам предоставлены микроконтроллеры AVR семейства Mega и AVR xmega, которые выпускаются в корпусах от 44 до 100 выводов и имеют до 1024 кб Flash памяти, а скорость их работы – до 32 миллионов операций в секунду. Практически все модели имеют возможность генерировать ШИМ, встроенный АЦП и ЦАП.
Миллионы радиолюбителей разрабатывают интересные проекты на AVR – это самое популярное семейство МК, о них написано очень много книг на русском и других языках мира.
Интересно: для прошивки нужен программатор, один из самых распространённых – это AVRISP MKII, который вы легко можете сделать из своей Arduino.
Популярность семейства АВР поддерживается на высоком уровне уже много лет, в последние 10 лет интерес к ним подогревает проект Arduino – плата для простого входа в мир цифровой электроники.
Сферы применения различных Tiny, Mega
Четко описать сферу применения микроконтроллера нельзя, ведь она безгранична, однако можно классифицировать следующим образом:
- Tiny AVR – самые простые в техническом плане. В них мало памяти и выводов для подключения сигналов, цена соответствующая. Однако это идеальное решение для простейших проектов, начиная от автоматики управления осветительными приборами салона автомобиля, до осциллографических пробников для ремонта электроники своими руками. Они также используются в Arduino-совместимом проекте – Digispark. Это самая маленькая версия ардуины от стороннего производителя; выполнена в формате USB-флешки.
- Семейство MEGA долго оставалось основным у продвинутых радиолюбителей, они мощнее и имеют больший, чем в Tiny, объём памяти и количество выводов. Это позволяет реализовывать сложные проекты, однако семейство очень широко для краткого описания. Именно они использовались в первых платах Arduino, актуальные платы оснащены, в основном, ATMEGA
Выход любого МК без дополнительных усилителей потянет светодиоды или светодиодную матрицу в качестве индикаторов, например.
AVR xMega или старшие микроконтроллеры
Разработчики Atmel создали AVR xMega, как более мощный МК, при этом принадлежащий к семейству AVR. Это было нужно для того, чтобы облегчить труд разработчика при переходе к более мощному семейству.
В AVR xMega есть два направления:
- МК с напряжением питания 1.8-2.7 вольта, работают с частотой до 12 мГц, их входа устойчивы к величине напряжения в 3.3 В;
- МК с напряжением питания 2.7-3.6 вольта уже могут работать на более высоких частотах – до 32 мГц, а вход устойчив к 5 вольтам.
Также стоит отметить: AVR xMega отлично работают в автономных системах, потому что имеют низкое энергопотребление. Для примера: при работающих таймерах и часах реального времени RTC потребляют 2 мА тока, и готовы к работе от прерывания внешнего или по переполнению таймера, а также по времени. Для выполнения целого ряда функций применяется множество 16 разрядных таймеров.
Работа с USB портом
Начнем с того, что для программирования микроконтроллера нужно использовать последовательный порт, однако на современных компьютерах COM порт часто отсутствует. Как подключить микроконтроллер к такому компьютеру? Если использовать преобразователи USB-UART, эта проблема решается очень легко. Простейший преобразователь вы можете собрать на микросхемах FT232 и Ch440, а его схема представлена ниже.
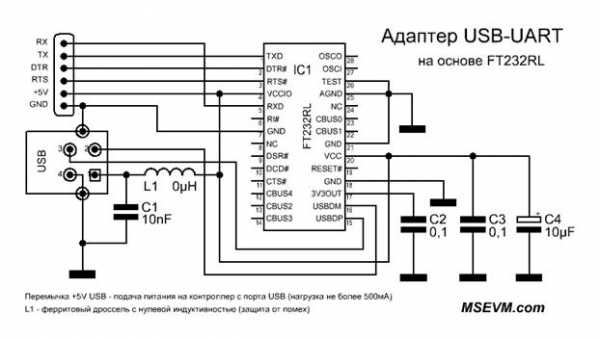
Такой преобразователь размещен на платах Arduino UNO и Aduino Nano.
Некоторые микроконтроллеры AVR имеют встроенный (аппаратный) USB:
- ATmega8U2;
- ATmega16U2;
- ATmega32U2.
Такое решение нашло применение для реализации связи компьютера и Arduino mega2560 по USB, в которой микроконтроллер «понимает» только UART.
Назначение ЦАП и АЦП микроконтроллеров AVR
Цифроаналоговыми преобразователями (ЦАП) называют устройства, преобразующие сигнал единиц и нолей (цифровой) в аналоговый (плавно изменяющийся). Главные характеристики – разрядность и частота дискретизации. В АЦП преобразуется аналоговый сигнал в цифровой вид.
Порты с поддержкой АЦП нужны для того, чтобы подключить к микроконтроллеру аналоговые датчики, например, резистивного типа.
ЦАП нашёл своё применение в цифровых фильтрах, где входной сигнал проходит программную обработку и вывод через ЦАП в аналоговом виде, ниже вы видите наглядные осциллограммы. Нижний график – входной сигнал, средний – этот же сигнал, но обработанный аналоговым фильтром, а верхний – цифровой фильтр на микроконтроллере Tiny45. Фильтр нужен для формирования нужного диапазона частот сигнала, а также для формирования сигнала определенной формы.
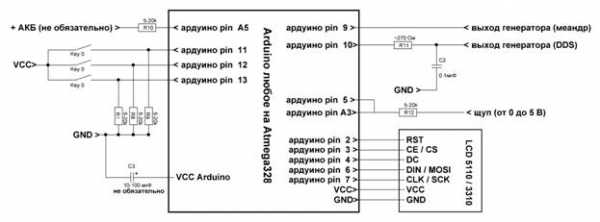 Схема осциллографа на микроконтроллере Atmega328
Схема осциллографа на микроконтроллере Atmega328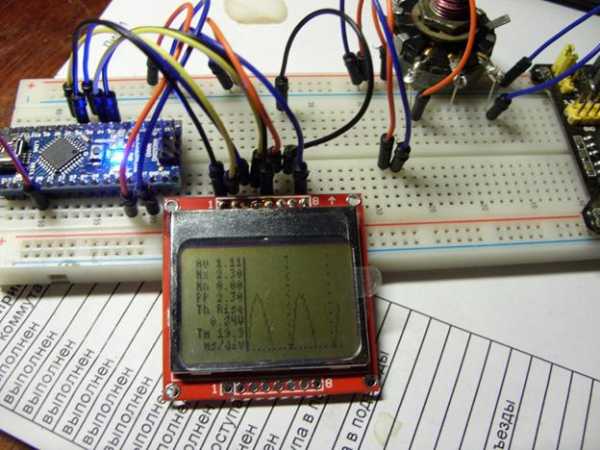
А здесь расположено подробное видео этого проекта, инструкции по сборке и советы от автора:
Какую литературу читать о микроконтроллерах AVR для начинающих?
Для обучения молодых специалистов написаны горы литературы, давайте рассмотрим некоторые из них:
- Евстифеев А.В. «Микроконтроллеры AVR семейства Mega». В книге подробно рассмотрена архитектура микроконтроллера. Описано назначение всех регистров и таймеров, а также их режимы работы. Изучена работа интерфейсов связи с внешним миром SPI и т. д. Система команд раскрыта для понимания радиолюбителю среднего уровня. Материал книги «Микроконтроллеры avr семейства mega: руководство пользователя» поможет изучить структуру чипа и назначение каждого из его узлов, что, безусловно, важно для любого программиста микроконтроллеров.
- Белов А.В. – «Микроконтроллеры AVR в радиолюбительской практике». Как видно из названия, эта книга, в большей степени, посвящена практической стороне работы с микроконтроллерами. Подробно рассмотрен ставший классическим микроконтроллер ATiny2313, а также многие схемы для сборки.
- Хартов В.Я. «Микроконтроллеры AVR. Практикум для начинающих». Поможет разобраться в AVR studio 4, а также стартовом наборе STK Вы научитесь работать с последовательными и параллельными интерфейсами, такими как UART, I2C и SPI. Книга «Микроконтроллеры AVR. Практикум для начинающих» написана преподавателем МГТУ им. Н.Э.Баумана и используется там для изучения этой темы.
Изучение этого семейства микроконтроллеров помогло начать работать и разрабатывать проекты многим любителям электроники. Стоит начинать именно с популярного семейства, чтобы всегда иметь доступ к морю информации.
Среди радиолюбителей начального уровня есть только один конкурент AVR – PIC микроконтроллеры.
arduinoplus.ru
Что такое AVR микроконтроллер?

ATMEGA168 (16KB FLASH) – $0.58 FREE SHIPPING
ATMEGA128 (128KB FLASH) – $0.72 FREE SHIPPING
AVR микроконтроллеры – это тип устройств, разработанный компанией Atmel, которые имеют определенное преимущество перед обычными микросхемами, но, сначала, давайте разберемся, что такое микроконтроллер?
Самый простой способ понять это – сравнить микроконтроллер с вашим компьютером, в котором установлена материнская плата. На этой плате стоит микропроцессор (на чипе Intel или AMD), который обеспечивает устройство вычислений, память RAM и EEPROM, и интерфейсы остальных систем, например, серийные порты (в настоящее время в основном USB), жесткие диски и графические интерфейсы. В микроконтроллере все эти возможности встроены в один чип, а это значит, что отсутствует потребность в материнской плате и многих других компонентах, например, светодиод может быть подключен напрямую к AVR. В микропроцессорах нет такой возможности!
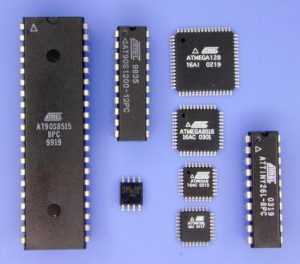
AVR микроконтроллеры выпускаются в нескольких корпусах, некоторые предназначены для монтажа в отверстия, некоторые для поверхностного. AVR бывают 8-ми и 100-пиновыми, хотя все, что выше 64-х пинов только для монтажа в отверстия. Большинство людей начинают с DIL (Сдвоенный в линию) 28—х пинового чипа, например, ATmega328 или 40-ка пинового ATmega16 или ATmega32.
Компьютерные микропроцессоры бывают минимум 32-х битными, а теперь чаще 64-х битные. Это означает, что они могут обрабатывать данные 32-х битными или 64-х битными блоками, если они подключены к шине. AVR гораздо проще и работает с 8-ми битными блоками, пропускная ширина потока 8 бит, хотя сейчас стали появляться AVR32 с 32-х битной шиной.
На компьютере установлена операционная система (Windows или Linux), и именно в ней запускаются программы, такие, как Word, InternetExplorer или Chrome. На 8-ми битном микроконтроллере, например, на таком, как AVR обычно нет установленной операционной системы, хотя, при необходимости, она может быть установлена. Вместо этого реализована возможность запуска одной программы.
Также, как и ваш компьютер, который будет бесполезным, если на нем не установлена ни одна программа, также, и AVR требует установки программ. Программа хранится во встроенной памяти AVR, а не на внешнем жестком диске, как на компьютере. Загрузка этой программы вAVR происходит при помощи программатора AVR
prom-electric.ru
AVR. Учебный курс | Электроника для всех
 |
Про шину IIC я писал уже неоднократно. Вначале было описание протокола, потом пример работы в лоб, а недавно камрад Ultrin выложил пример работы с i2c на базе блока USI. Да и в интернете полно статей по использованию этой шины в своих целях. Одно плохо — все они какие то однобокие. В подавляющем большинстве случаев используется конфигурация «Контроллер-Master & EEPROM-Slave». Да еще и на программном мастере. И ни разу я не встречал материала, чтобы кто то сделал Контроллер-Slave или описал многомастерную систему, когда несколько контроллеров сидят на шине и решают арбитражем конфликты передачи. Пустоту пора заполнять, решил я и завязал узелок на память… Да только веревочку пролюбил 🙂
Обещаного три года ждут, вот я таки пересилил лень, выкроил время и сообразил полноценную библиотеку для работы с аппаратным модулем TWI, встроенным во все контроллеры серии MegaAVR. Давно грозился.
Кошмар на крыльях ночи
Во-первых, я сразу же отказался от концепции тупого последовательного кода. Когда у нас есть некоторая функция SendByte(Address,Byte) которая шлет данные по шине, а потом возвращает 1 или 0 в зависимости от успешности или неуспешности операции. Метод прост, дубов, но медленный. Т.е. пока мы байт не пошлем мы не узнаем ушло ли оно, а значит будем вынуждены тупить и ждать. Да, шина i2c может быть очень быстрой. До 100кбит ЕМНИП, но даже это время, а я все же за высокоскоростное выполнение кода, без тормозных выдержек. Наш выбор — диспетчеризация и работа на прерываниях.
Суть в том, что мы подготавливаем данные которые нужно отослать. Дальше запускаем аппаратуру передачи и возвращаемся к своим делам. А зверский конечный автомат, что висит на прерывании TWI передатчика сам передает данные, отвлекая основную программу только тогда, когда нужен какой-либо экшн (например сунуть очередной байт в буфер передачи). Когда же все будет передано, то он генерит событие, которое оповещает головную программу, что мол задание выполнено.
Как? Ну это уже от конкретной реализации событий программы зависит. Может флажок выставить или байт состояния конечного автомата подправить, а может и задачу на конвейер диспетчера набросить или Event в почтовый ящик задачи скинуть. Если юзается RTOS.
Read More »
easyelectronics.ru
Микроконтроллеры AVR
Микроконтроллеры AVR
Введение
Однокристальные микроконтроллеры находят широкие применение в самых разнообразных сферах: от измерительных приборов, фотоаппаратов и видеокамер, принтеров, сканеров и копировальных аппаратов до изделий электронных развлечений и всевозможной домашней техники.
Со времени появления первых микропроцессоров в 1970-х годах их сложность постоянно возрастала за счет появления новых аппаратных решений и добавления новых команд, предназначенных для решения новых задач. Так постепенно сложилась архитектура, получившая впоследствии название CISC (Complete Instruction Set Computers – компьютеры со сложным набором команд). В дальнейшем обозначилось и нашло активное развитие еще одно направление: архитектура RISC (Reduced Instruction Set Computers – компьютеры с сокращенным набором команд). Именно к этой архитектуре относятся микроконтроллеры AVR от компании Atmel и PIC от компании Microchip, которым посвящена эта книга.
Основное преимущество RISC-процессоров заключается в том, что они просты, выполняют ограниченный набор команд, и, как следствие, очень быстродействующие. Это позволяет снизить стоимость и сложность их программирования.
Обратной стороной RISC-архитектуры стала необходимость создания дополнительных команд на ассемблере, которые у CISC-устройств реализованы в аппаратной части. Например, вместо того, чтобы просто вызвать команду деления, которая характерна для устройств CISC, разработчику, имеющему дело с RISC-процессором, приходится применять несколько последовательных команд вычитания. Однако подобный недостаток с лихвой компенсируется ценой и скоростью работы RISC-устройств. Кроме того, если создавать программы на языке С, то подобные проблемы вообще перестают иметь какое-либо значение для разработчика, поскольку они решаются компилятором, который автоматически генерирует весь недостающий ассемблерный код.
На заре возникновения микропроцессоров разработка программного обеспечения происходила исключительно на том или ином языке ассемблера, ориентированном на конкретное устройство. По сути, такие языки представляли собой символьные мнемоники соответствующих машинных кодов, а перевод мнемоники в машинный код выполнялся транслятором. Однако главный недостаток ассемблерных языков заключается в том, что каждый из них привязан к конкретному типу устройств и логике его работы. Кроме того, ассемблер сложен в освоении, что требует достаточно больших усилий для его изучения, которые, к тому же, оказываются потраченными впустую, если впоследствии потребуется перейти на использование микроконтроллеров других производителей.
Язык С, являясь языком высокого уровня, лишен подобных недостатков и может использоваться для программирования любого микропроцессора, для которого есть компилятор с языка С. В языке С все низкоуровневые операции, выполняемые компьютерами, представлены в виде абстрактных конструкций, позволяющих разработчикам сосредоточиться на программировании одной лишь логики, не заботясь о машинном коде. Изучив язык С, можно легко переходить от одного семейства микроконтроллеров к другому, тратя гораздо меньше времени на разработку.
1. Архитектура микроконтроллеров AVR и PIC
В общем, все микроконтроллеры построены по одной схеме. Система управления, состоящая из счетчика команд и схемы декодирования, выполняет считывание и декодирование команд из памяти программ, а операционное устройство отвечает за выполнение арифметических и логических операций; интерфейс ввода/вывода позволяет обмениваться данными с периферийными устройствами; и, наконец, необходимо иметь запоминающее устройство для хранения программ и данных (рис. 1.1).
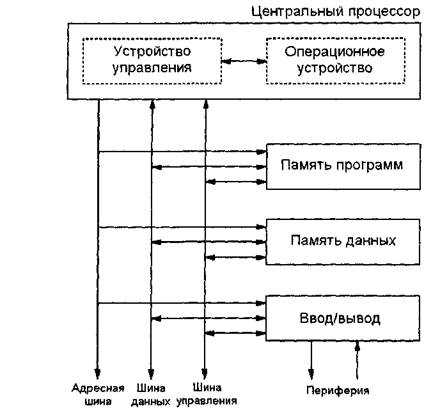
Рис. 1.1. Обобщенная структура микроконтроллера
Будем рассматривать микроконтроллеры в общем, не привязываясь к какому-либо конкретному типу микроконтроллеров AVR, поэтому ниже будут рассмотрены только общие для большинства микроконтроллеров особенности архитектуры памяти, вопросы ввода/вывода, обработки прерываний, сброса и др.
В микроконтроллерах AVR память реализована по Гарвардской архитектуре, что подразумевает разделение памяти команд и данных. Это означает, что обращение к командам осуществляется независимо от доступа к данным. Преимуществом такой организации является повышение скорости доступа к памяти.
Память данных
Память данных предназначена для записи/чтения данных, используемых программами. Является энергозависимой, то есть, при отключении питания микроконтроллера все хранимые в ней данные, будут потеряны. В микроконтроллерах AVR память данных имеет более развитую структуру по сравнению с микроконтроллерами PIC, что показано на рис. 2.1.
Здесь и далее шестнадцатеричные числа будут представлены в форме, принятой в языке С: с префиксом 0х.
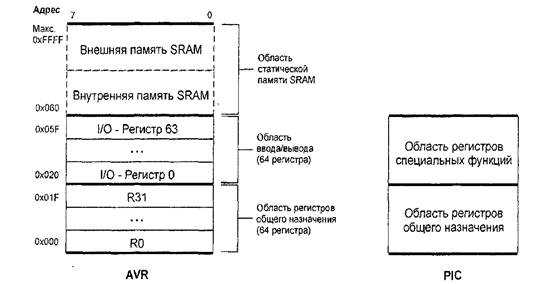
Рис. 2.1. Структура памяти данных в микроконтроллерах AVR и PIC
Область статической памяти SRAM (Static Random Access Memory) обозначена на рис. 2.1 пунктиром, поскольку используется не всеми микроконтроллерами AVR (это относится как к внутренней, так и к внешней SRAM). Ее начальный адрес – 0x060, а верхний адрес – разный в различных устройствах.
В некоторых микроконтроллерах AVR можно увеличивать пространство памяти SRAM посредством подключения внешних блоков памяти вплоть до 64 Кбайт, однако для этого приходится пожертвовать портами А и С, которые в этом случае применяются для передачи данных и адресов.
Регистры общего назначения
Область регистров общего назначения (рабочих регистров) предназначена для временного хранения переменных и указателей, используемых процессором для выполнения программ. В микроконтроллерах AVR она состоит из 32 восьмиразрядных регистров (диапазон адресов 0x000 – 0x01F). В микроконтроллерах PIC регистры общего назначения также восьмиразрядные, однако их количество и диапазон адресов зависят от конкретного типа устройства.
В программах, написанных на языке С, непосредственное обращение к регистрам общего назначения обычно не требуется, если только не используются фрагменты на языке ассемблера.
Регистры специальных функций микроконтроллеров PIC
Регистры специальных функций используются в микроконтроллерах PIC для управления различными операциями. Как и в случае с регистрами общего назначения, их количество и адресация отличаются от устройства к устройству. В программах, написанных на языке С, непосредственное обращение к регистрам специальных функций обычно не требуется, если только не используются фрагменты на языке ассемблера.
Область ввода/вывода микроконтроллеров AVR
Область ввода/вывода микроконтроллеров AVR содержит 64 регистра, используемых для управления или хранения данных периферийных устройств. К каждому из этих регистров можно обращаться по адресу ввода/вывода (начиная с 0x000) или по адресу SRAM (в этом случае к адресу ввода/вывода следует прибавить 0x020). В программах на языке С обычно используются условные имена регистров ввода/вывода, а адреса имеют значение только для программ на языке ассемблера.
Имена, адреса ввода/вывода и SRAM, а также краткое описание регистров из области ввода/вывода микроконтроллеров AVR представлены в табл. 2.1. При этом следует отметить, что в различных моделях микроконтроллеров некоторые из перечисленных регистров не используются, а адреса, не указанные в табл. 2.1, зарезервированы компанией Atmel для использования в будущем.
Таблица 2.1. Описание регистров из области ввода/вывода
Регистр состояния SREG микроконтроллеров AVR
Регистр состояния содержит флаги условий микроконтроллеров AVR и располагается в области ввода/вывода по адресу $3F (адрес SRAM – $5F). После подачи сигнала сброса он инициализируется нулями.
mirznanii.com
Устройство и структура микроконтроллеров AVR
УСТРОЙСТВО МИКРОКОНТРОЛЛЕРОВ AVR
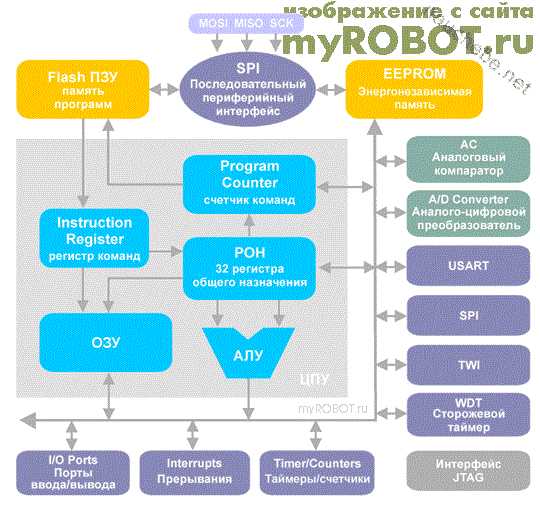
Микроконтроллер AVR содержит: быстрый RISK-процессор, два типа энергонезависимой памяти (Flash-память программ и память данных EEPROM), оперативную память RAM, порты ввода/вывода и различные периферийные интерфейсные схемы.
Процессор
| CISC и RISC По числу команд микропроцессоры подразделяют на CISC (Complex Instruction Set Computer) и RISC (Reduced Instruction Set Computer). Термин CISC обозначает сложную систему команд, RISC – сокращенную. Идея RISC – это тщательный подбор команд, которые можно было бы выполнить за один такт. Т. о. упрощается аппаратная реализация процессора, сокращается число транзисторов, снижается потребляемая мощность и цена. Очевидно, что в общем случае одной CISC-команде должны соответствовать несколько RISC-команд. Однако обычно выигрыш в быстродействии у RISC перекрывает потери. Так, самая быстрая команда у 8051 выполняется за 12 тактов. Даже если для каждой CISC-инструкции потребуется выполнить три RISC-инструкции, то в итоге RISC-архитектура будет в 4 раза производительней. В настоящее время грань между RISC и CISC стирается. Например, AVR имеют 133 команды, что соответствует CISC, но большинство из них выполняется за один такт, что является признаком RISC. Поэтому основным признаком RISC стало принято считать выполнение команд за один такт. |
Сердцем микроконтроллеров AVR является 8-битное микропроцессорное ядро или центральное процессорное устройство (ЦПУ), построенное на принципах RISK-архитектуры. Основой этого блока служит арифметико-логическое устройство (АЛУ). По системному тактовому сигналу из памяти программ в соответствии с содержимым счетчика команд (Program Counter – PC) выбирается очередная команда и выполняется АЛУ. Во время выбора команды из памяти программ происходит выполнение предыдущей выбранной команды, что и позволяет достичь быстродействия 1 MIPS на 1 МГц.
АЛУ подключено к регистрам общего назначения РОН (General Purpose Registers – GPR). Регистров общего назначения всего 32, они имеют байтовый формат, то есть каждый из них состоит из восьми бит. РОН находятся в начале адресного пространства оперативной памяти, но физически не являются ее частью. Поэтому к ним можно обращаться двумя способами (как к регистрам и как к памяти). Такое решение является особенностью AVR и повышает эффективность работы и производительность микроконтроллера.
Отличие между регистрами и оперативной памятью состоит в том, что с регистрами можно производить любые операции (арифметические, логические, битовые), а в оперативную память можно лишь записывать данные из регистров.
Память
В микроконтроллерах AVR реализована Гарвардская архитектура, в соответствии с которой разделены не только адресные пространства памяти программ и памяти данных, но и шины доступа к ним. Каждая из областей памяти данных (оперативная память и EEPROM) также расположена в своем адресном пространстве.
Память программ (Flash ROM или Flash ПЗУ)
| Фоннеймановская и гарвардская архитектура В 1945 г. американский математик Джон фон Нейман сформулировал основные принципы работы современных компьютеров. Им была предложена архитектура, получившая его имя (von Neumann architecture) и предполагающая хранение программ и данных в общей памяти (1946 г.). Сегодня такая архитектура наиболее характерна для микропроцессоров, ориентированных на использование в компьютерах. Примером могут служить микропроцессоры семейства х86. Архитектура, предполагающая раздельное использование памяти программ и данных, носит название гарвардской (Harvard architecture). Гарвардская архитектура позволяет центральному процессору работать одновременно как с памятью программ, так и с памятью данных, что существенно увеличивает производительность. |
Память программ предназначена для хранения последовательности команд, управляющих функционированием микроконтроллера, и имеет 16-ти битную организацию. Все AVR имеют Flash-память программ, которая может быть различного размера – от 1 до 256 КБайт. Ее главное достоинство в том, что она построена на принципе электрической перепрограммируемости, т. е. допускает многократное стирание и запись информации. Программа заносится во Flash-память AVR как с помощью обычного программатора, так и с помощью SPI-интерфейса, в том числе непосредственно на собранной плате. Возможностью внутрисхемного программирования (функция ISP) через коммуникационный интерфейс SPI обладают все микроконтроллеры AVR, кроме Tiny11 и Tiny28.
Все микроконтроллеры семейства Mega имеют возможность самопрограммирования, т. е. самостоятельного изменения содержимого своей памяти программ. Эта особенность позволяет создавать на их основе очень гибкие системы, алгоритм работы которых будет меняться самим микроконтроллером в зависимости от каких-либо внутренних условий или внешних событий.
Гарантированное число циклов перезаписи Flash-памяти у микроконтроллеров AVR второго поколения составляет не менее 10 тыс. циклов при типовом значении 100 тыс. циклов. (В официальной технической документации Atmel Corp. указывается значение 10 тыс. циклов.)
Память данных
Память данных разделена на три части: регистровая память, оперативная память (ОЗУ – оперативное запоминающее устройство или RAM) и энергонезависимая память (ЭСППЗУ или EEPROM).
Регистровая память (РОН и РВВ)
Регистровая память включает 32 регистра общего назначения (РОН или GPR), объединенных в файл, и служебные регистры ввода/вывода (РВВ). И те и другие расположены в адресном пространстве ОЗУ, но не являются его частью.
В области регистров ввода/вывода расположены различные служебные регистры (регистры управления микроконтроллером, регистры состояния и т. п.), а также регистры управления периферийными устройствами, входящими в состав микроконтроллера. По сути, управление микроконтроллером заключается в управлении этими регистрами.
Энергонезависимая память данных (EEPROM)
Для долговременного хранения различной информации, которая может изменяться в процессе функционирования микроконтроллерной системы, используется EEPROM-память. Все AVR имеют блок энергонезависимой электрически перезаписываемой памяти данных EEPROM от 64 Байт до 4 КБайт. Этот тип памяти, доступный программе микроконтроллера непосредственно в ходе ее выполнения, удобен для хранения промежуточных данных, различных констант, коэффициентов, серийных номеров, ключей и т.п. EEPROM может быть загружена извне как через SPI интерфейс, так и с помощью обычного программатора. Число циклов стирание/запись – не менее 100 тыс.
Оперативная память (ОЗУ или RAM)
Внутренняя оперативная статическая память Static RAM (SRAM) имеет байтовый формат и используется для оперативного хранения данных.
Размер оперативной памяти может варьироваться у различных чипов от 64 Байт до 4 КБайт. Число циклов чтения и записи в RAM не ограничено, но при отключении питающего напряжения вся информация теряется.
Для некоторых микроконтроллеров возможна организация подключения внешнего статического ОЗУ объемом до 64К.
Периферия
Периферия микроконтроллеров AVR включает: порты (от 3 до 48 линий ввода и вывода), поддержку внешних прерываний, таймеры-счетчики, сторожевой таймер, аналоговые компараторы, 10-разрядный 8-канальный АЦП, интерфейсы UART, JTAG и SPI, устройство сброса по понижению питания, широтно-импульсные модуляторы.
Порты ввода/вывода (I/O)
Порты ввода/вывода AVR имеют число независимых линий “вход/выход” от 3 до 53. Каждая линия порта может быть запрограммирована на вход или на выход. Мощные выходные драйверы обеспечивают токовую нагрузочную способность 20 мА на линию порта (втекающий ток) при максимальном значении 40 мА, что позволяет, например, непосредственно подключать к микроконтроллеру светодиоды и биполярные транзисторы. Общая токовая нагрузка на все линии одного порта не должна превышать 80 мА (все значения приведены для напряжения питания 5 В).
Архитектурная особенность построения портов ввода/вывода у AVR заключается в том, что для каждого физического вывода (пина) существует 3 бита контроля/управления, а не 2, как у распространенных 8-разрядных микроконтроллеров (Intel, Microchip, Motorola и т.д.). Это позволяет избежать необходимости иметь копию содержимого порта в памяти для безопасности и повышает скорость работы микроконтроллера при работе с внешними устройствами, особенно в условиях внешних электрических помех.
Прерывания (INTERRUPTS)
Система прерываний – одна из важнейших частей микроконтроллера. Все микроконтроллеры AVR имеют многоуровневую систему прерываний. Прерывание прекращает нормальный ход программы для выполнения приоритетной задачи, определяемой внутренним или внешним событием.
Для каждого такого события разрабатывается отдельная программа, которую называют подпрограммой обработки запроса на прерывание (для краткости – подпрограммой прерывания), и размещается в памяти программ.
При возникновении события, вызывающего прерывание, микроконтроллер сохраняет содержимое счетчика команд, прерывает выполнение центральным процессором текущей программы и переходит к выполнению подпрограммы обработки прерывания.
После выполнения подпрограммы прерывания осуществляется восстановление предварительно сохраненного счетчика команд и процессор возвращается к выполнению прерванной программы.
Для каждого события может быть установлен приоритет. Понятие приоритет означает, что выполняемая подпрограмма прерывания может быть прервана другим событием только при условии, что оно имеет более высокий приоритет, чем текущее. В противном случае центральный процессор перейдет к обработке нового события только после окончания обработки предыдущего.
Таймеры/счетчики (TIMER/COUNTERS)
Микроконтроллеры AVR имеют в своем составе от 1 до 4 таймеров/счетчиков с разрядностью 8 или 16 бит, которые могут работать и как таймеры от внутреннего источника тактовой частоты, и как счетчики внешних событий.
Их можно использовать для точного формирования временных интервалов, подсчета импульсов на выводах микроконтроллера, формирования последовательности импульсов, тактирования приемопередатчика последовательного канала связи. В режиме ШИМ (PWM) таймер/счетчик может представлять собой широтно-импульсный модулятор и используется для генерирования сигнала с программируемыми частотой и скважностью. Таймеры/счетчики способны вырабатывать запросы прерываний, переключая процессор на их обслуживание по событиям и освобождая его от необходимости периодического опроса состояния таймеров. Поскольку основное применение микроконтроллеры находят в системах реального времени, таймеры/счетчики являются одним из наиболее важных элементов.
Сторожевой таймер (WDT)
Сторожевой таймер (WatchDog Timer) предназначен для предотвращения катастрофических последствий от случайных сбоев программы. Он имеет свой собственный RC-генератор, работающий на частоте 1 МГц. Как и для основного внутреннего RC-генератора, значение 1 МГц является приближенным и зависит прежде всего от величины напряжения питания микроконтроллера и от температуры.
Идея использования стоpожевого таймеpа предельно проста и состоит в pегуляpном его сбpасывании под упpавлением пpогpаммы или внешнего воздействия до того, как закончится его выдеpжка вpемени и не пpоизойдет сбpос пpоцессоpа. Если пpогpамма pаботает ноpмально, то команда сбpоса стоpожевого таймеpа должна pегуляpно выполняться, пpедохpаняя поцессоp от сбpоса. Если же микpопpоцессоp случайно вышел за пpеделы пpогpаммы (напpимеp, от сильной помехи по цепи питания) либо зациклился на каком-либо участке пpогpаммы, команда сбpоса стоpожевого таймеpа скоpее всего не будет выполнена в течение достаточного вpемени и пpоизойдет полный сбpос пpоцессоpа, инициализиpующий все pегистpы и пpиводящий систему в pабочее состояние.
Аналоговый компаратор (AC)
Аналоговый компаратор (Analog Comparator) сравнивает напряжения на двух выводах (пинах) микроконтроллера. Результатом сравнения будет логическое значение, которое может быть прочитано из программы.
Выход аналогового компаратора можно включить на прерывание от аналогового компаратора. Пользователь может установить срабатывание прерывания по нарастающему или спадающему фронту или по переключению.
Присутствует у всех современных AVR, кроме Mega8515
Аналого-цифровой преобразователь (A/D CONVERTER)
Аналого-цифровой преобразователь (АЦП) служит для получения числового значения напряжения, поданного на его вход. Этот результат сохраняется в регистре данных АЦП. Какой из выводов (пинов) микроконтроллера будет являться входом АЦП, определяется числом, занесенным в соответствующий регистр.
Универсальный последовательный приемопередатчик (UART или USART)
Универсальный асинхронный или универсальный синхронно/асинхронный приемопередатчик (Universal Synchronous/Asynchronous Receiver and Transmitter – UART или USART) – удобный и простой последовательный интерфейс для организации информационного канала обмена микроконтроллера с внешним миром. Способен работать в дуплексном режиме (одновременная передача и прием данных). Он поддерживает протокол стандарта RS-232, что обеспечивает возможность организации связи с персональным компьютером. (Для стыковки МК и компьютера обязательно понадобится схема сопряжения уровней сигналов. Для этого существуют специальные микросхемы, например MAX232.)
Последовательный периферийный интерфейс SPI
Последовательный периферийный трехпроводный интерфейс SPI (Serial Peripheral Interface) предназначен для организации обмена данными между двумя устройствами. С его помощью может осуществляться обмен данными между микроконтроллером и различными устройствами, такими, как цифровые потенциометры, ЦАП/АЦП, FLASH-ПЗУ и др. С помощью этого интерфейса удобно производить обмен данными между несколькими микроконтроллерами AVR.
Кроме того, через интерфейс SPI может осуществляться программирование микроконтроллера.
Двухпроводной последовательный интерфейс TWI
Двухпроводной последовательный интерфейс TWI (Two-wire Serial Interface) является полным аналогом базовой версии интерфейса I2C (двухпроводная двунаправленная шина) фирмы Philips. Этот интерфейс позволяет объединить вместе до 128 различных устройств с помощью двунаправленной шины, состоящей из линии тактового сигнала (SCL) и линии данных (SDA).
Интерфейс JTAG
Интерфейс JTAG был разработан группой ведущих специалистов по проблемам тестирования электронных компонентов (Joint Test Action Group) и был зарегистрирован в качестве промышленного стандарта IEEE Std 1149.1-1990. Четырехпроводной интерфейс JTAG используется для тестирования печатных плат, внутрисхемной отладки, программирования микроконтроллеров.
Многие микроконтроллеры семейства Mega имеют совместимый с IEEE Std 1149.1 интерфейс JTAG или debugWIRE для встроенной отладки. Кроме того, все микроконтроллеры Mega с флэш-памятью емкостью 16 кбайт и более могут программироваться через интерфейс JTAG.
Тактовый генератор
Тактовый генератор вырабатывает импульсы для синхронизации работы всех узлов микроконтроллера. Внутренний тактовый генератор AVR может запускаться от нескольких источников опорной частоты (внешний генератор, внешний кварцевый резонатор, внутренняя или внешняя RC-цепочка). Минимальная допустимая частота ничем не ограничена (вплоть до пошагового режима). Максимальная рабочая частота определяется конкретным типом микроконтроллера и указывается Atmel в его характеристиках, хотя практически любой AVR-микроконтроллер с заявленной рабочей частотой, например, в 10 МГц при комнатной температуре легко может быть “разогнан” до 12 МГц и выше.
Система реального времени (RTC)
RTC реализована во всех микроконтроллерах Mega и в двух кристаллах “classic” – AT90(L)S8535. Таймер/счетчик RTC имеет отдельный предделитель, который может быть программным способом подключен или к источнику основной тактовой частоты, или к дополнительному асинхронному источнику опорной частоты (кварцевый резонатор или внешний синхросигнал). Для этой цели зарезервированы два вывода микросхемы. Внутренний осциллятор оптимизирован для работы с внешним “часовым” кварцевым резонатором 32,768 кГц.
Питание
AVR функционируют при напряжениях питания от 1,8 до 6,0 Вольт. Ток потребления в активном режиме зависит от величины напряжения питания и частоты, на которой работает микроконтроллер, и составляет менее 1 мА для 500 кГц,5 … 6 мА для 5 МГц и 8 … 9 мА для частоты 12 МГц.
AVR могут быть переведены программным путем в один из трех режимов пониженного энергопотребления.
Режим холостого хода (IDLE).
Прекращает работу только процессор и фиксируется содержимое памяти данных, а внутренний генератор синхросигналов, таймеры, система прерываний и сторожевой таймер продолжают функционировать. Ток потребления не превышает 2,5 мА на частоте 12 МГц.
Стоповый режим (POWER DOWN).
Сохраняется содержимое регистрового файла, но останавливается внутренний генератор синхросигналов, и, следовательно, останавливаются все функции, пока не поступит сигнал внешнего прерывания или аппаратного сброса. При включенном сторожевом таймере ток потребления в этом режиме составляет около 80 мкА, а при выключенном – менее 1 мкА. (Все приведенные значения справедливы для напряжения питания 5 В).
Экономичный режим (POWER SAVE).
Продолжает работать только генератор таймера, что обеспечивает сохранность временной базы. Все остальные функции отключены.
Сброс при снижении напряжения питания (BOD)
Схема BOD (Brown-Out Detection) отслеживает напряжение источника питания. Если схема включена, то при снижении питания ниже некоторого значения она переводит микроконтроллер в состояние сброса. Когда напряжение питания вновь увеличится до порогового значения, запускается таймер задержки сброса. После формирования задержки внутренний сигнал сброса снимается и происходит запуск микроконтроллера.
Источник: myrobot.ru
nauchebe.net
AVR для начинающих.Уроки программирования AVR.
Урок 0.
Итак, сегодня мы открываем цикл уроков программирования микроконтроллеров семейства AVR.
Сегодня будут рассмотрены следующие вопросы:
- Что такое микроконтроллер?
- Где применяются микроконтроллеры?
Вступление.
Микроконтроллеры везде. В телефонах, стиральных машинах, «умных домах»,станках на заводе а так же ещё в бесчисленном множестве технических устройств. Их повсеместное применение позволяет заменить сложные аналоговые схемы, более сжатыми цифровыми.
Так что же такое, микроконтроллер?
Микроконтроллер (Micro Controller Unit, MCU) — микросхема, предназначенная для управления электронными устройствами.Можно представить его в виде простейшего компьютера, способного взаимодействовать с внешними устройствами.Например, открывать и закрывать транзисторы, получать данные с датчиков температуры, выводить данные на lcd экраны и т. д. . К тому же, микроконтроллер может производить различную обработку входных данных, как и Ваш персональный компьютер.
То есть, микроконтроллеры открывают нам практически безграничные возможности управления какими либо устройствами, благодаря наличию портов I/0(портов ввода(input)/вывода(output)), а так же возможности их программирования.
Где используются микроконтроллеры?

- Бытовая техника(Стиральные машины, микроволновые печи и.т.д.).
- Мобильная техника(Роботы, робототехнические системы, средства связи и др.).
- Промышленное оборудование(Системы управления станками).
- Вычислительная техника(Материнские платы,системы управления периферийными устройствами).
- Развлекательная техника(Детские игрушки, украшения).
- Транспорт(Системы управления двигателем автомобиля, системы безопасности)
Это далеко не полный список сфер применения микроконтроллеров. Часто, очень выгодно заменить набор управляющих микросхем одним микроконтроллером, ввиду упрощения производства, снижения энергопотребления.
Начало знакомства с AVR
AVR — семейство микроконтроллеров фирмы Atmel.Обладают достаточной производительностью для большинства любительских устройств. Так же находят широкое применение в промышленности.
Для их программирования используются языки AVR C и AVR Assembler.
Начать работу с ними достаточно просто. Существует несколько способов приступить к разработке устройств на базе микроконтроллеров AVR, о них мы поговорим в следующей части.
Спасибо за внимание!
Администрация сайта MKPROG.RU.
Другие уроки цикла.
mkprog.ru
Atmel микроконтроллеры: помощники начинающим программистам
Компания Atmel – производитель популярных семейств микроконтроллеров, каждое из которых имеет свои направления. Интересен этот производитель тем, что микроконтроллеры Atmel семейства AVR очень популярны в среде радиолюбителей. Кроме AVR контроллеров компания выпускает устройства с архитектурой ARM и i8051.
Популярность устройств обусловлена огромным количеством литературы по микроконтроллерам AVR. Каждый может освоить с нуля и писать простые коды с минимальным набором знаний.
 Плата Atmel AVR
Плата Atmel AVRКакие бывают микроконтроллеры Atmel
Начнем с самого популярного, для освоения микроконтроллеров в целом, – Atmel AVR. Его можно разделить на два направления:
- 8-битные микроконтроллеры.
- 32-битные микроконтроллеры.
Среди простых проектов для любителей электроники особую популярность снискала именно 8-битная часть семейства. Есть хорошая справочная литература «Микроконтроллеры AVR семейства classic фирмы Atmel», в которой описана вся архитектура, назначение отдельных узлов, регистров и прочего. Не стоит беспокоиться, что она посвящена уже устаревшему семейству AVR Classic – в наши дни оно вытеснено контроллерами Attiny и Atmega, хотя самая маленькая и быстрая модель – AT90S2313 выпускается и по сей день, слегка в модернизированном виде – Attiny 2313.
Современные семейства программно и функционально совместимы с более старыми, а переход с Classic на Mega и Tiny требует минимальных трудозатрат и изменений программного кода. Среди семейства особенную популярность заслужил микроконтроллер с маркировкой Atmega 328p, применяемый во многих популярных платах Arduino. Почти все они имеют небольшое количество энергонезависимой памяти с ограниченным числом циклов записи (до 100 000) – EEPROM.
Такая память нужна не для текущих вычислений, потому что быстро закончится её ресурс, а для хранения данных в долгосрочной перспективе. Энергонезависимость EEPROM памяти обеспечивает сохранность всей информации после обесточивания микроконтроллера.
Семейство Atmel Smart базируется на архитектуре ARM. Компания правообладатель ARM свободно продает лицензии на разработку контроллеров со своей архитектурой разным производителям, что ускоряет распространение и популяризацию первых. Стоит отметить яркого представителя – микроконтроллер AT91SAM3X8E, является сердцем Arduino DUE, 32-бита. Это позволяет очень легко начать знакомство с такой архитектурой и разработку устройств энтузиастам электроники. Atmel ARM по характеристикам превосходит большинство микроконтроллеров Atmel AVR
Семейство Atmel 8051 – основано на по-настоящему легендарной архитектуре. Intel 8051 является одним из первых массовых микроконтроллеров с широчайшей сферой применения. Позволяет проектировать высокопрецизионные устройства с огромным быстродействием, практически сравнимым с быстродействием схем на логике. В линейке есть микроконтроллеры, работающие на частотах в 100 МГц, при этом выполняющие 100 миллионов операций в секунду, а это отличные показатели для этой архитектуры. Вы можете добиться быстродействия в долях микросекунд.
Способы связи компьютера и микроконтроллера Atmel
Чаще всего связь с МК устанавливается через COM-порт. На современных компьютерах и ноутбуках последовательного порта нет. Это вызывает необходимость использования USB-UART преобразователь, который распознаётся как виртуальный COM-порт.
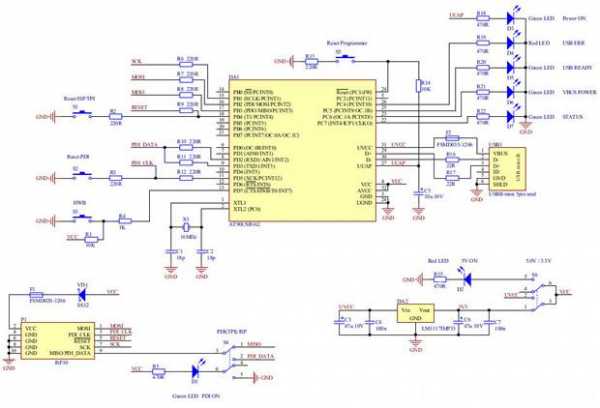
Чтобы заливать прошивку в микроконтроллер, нужен либо этот преобразователь, либо специализированный программатор, например, AVRISP MKii – вы можете его собрать сами, но и в его составе есть микроконтроллер.
Происходит «каламбур»: для сборки программатора нужен программатор. Чтобы выйти из этой ситуации, используется специальный чип AT90USB162. Он, в свою очередь, при подключении к USB порту компьютера распознаётся как полноценное USB устройство, прошивку в которое можно загрузить с помощью утилиты Flip от Atmel.
Утилита Flip поддерживает программирование через следующие интерфейсы:
С помощью flip можно загрузить прошивку для программатора микроконтроллеров Атмела без использования COM-порта, а схема AVRISP mk II изображена ниже.
Для работы микроконтроллеров по интерфейсу UART (маркировка интерфейса – rs-232) в Atmel AVR выделен регистр UDR (UART data register), а настройки его работы хранятся в конфигурационных регистрах UCSRA, UCSRB и UCSRС. Настройки битов приемопередатчика Rx, Tx, кстати, хранятся в UCSRA.
Вопросы программирования микроконтроллеров
Для программирования МК ваш код нужно компилировать, для этого есть множество программного обеспечения, пример одного из них – это компилятор IAR. Использование этого компилятора не ограничено одними лишь Atmel. 8051, AVR, AVR32, ARM – это лишь небольшой перечень из более чем 20 поддерживаемых архитектур.
IAR – это универсальное решение для программирования микроконтроллеров различного типа и уровня. Хотя компиляторов есть большое количество, например, WinAVR и CodeVision, но они не осуществляют компилирование программ для тех же АРМов и других архитектур.
IAR Embedded Workbench – полное название этой мощной рабочей среды. Применение ИАРА позволяет добиться меньше размера и большего быстродействия кода; он набирает всё большую популярность из-за своих огромных возможностей.
 Пример экрана IAR Embedded Workbench
Пример экрана IAR Embedded WorkbenchРабота с микроконтроллерами требует постоянного выполнения одинаковых действий, таких как компиляция, прошивка, сброс к заводским установкам; для автоматизации этих процессов нужно использовать Makefile – набор инструкций для компилятора, в нём записаны обозначения действий с файлами программного кода и другие команды.
Для отладки готовых программ был разработан Atmel ice. Он нужен для внутрисхемной отладки программирования и прошивки устройств. Имеет два разъёма:
- Универсальный AVR, поддерживающий любой интерфейс;
- ARM.
Судя по отзывам реальных пользователей, работает он быстрее аналогов – AVR Dragon, например, при этом захватывает архитектуру АРМов и имеет больше функций.
Выводы
Фирма Atmel сейчас принадлежит Microchip’у, но продолжает выпускать свои семейства микроконтроллеров. Их популярность не угасала за многие годы, однако в последнее время наблюдается активная конкуренция с STM. Пока рано говорить, кто из них вырвется вперед, рассуждения об этом – тема отдельной статьи.
Выбор семейства зависит только от разработчика и поставленных перед ним задач, а AVR контроллеры помогли многим разработчикам «войти» в программирование микроконтроллеров.
arduinoplus.ru
