
Обмотки ротора асинхронного двигателя
- Подробности
- Категория: Электрические машины
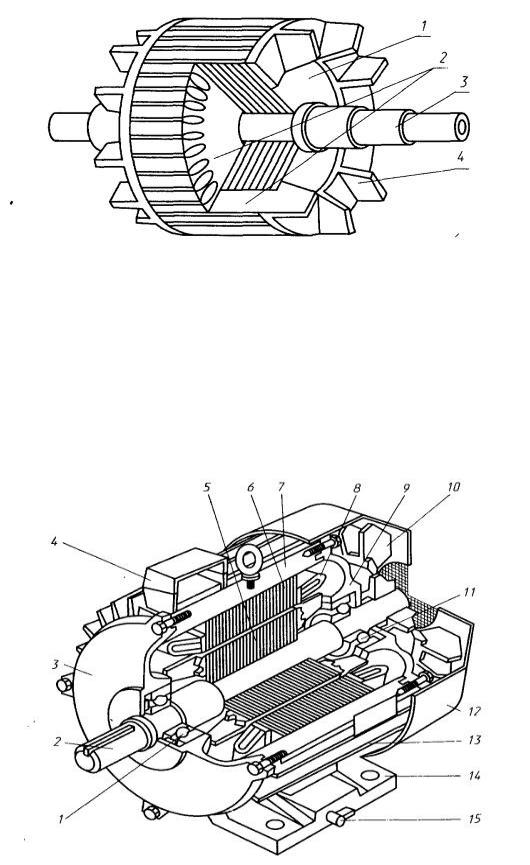
Вращающаяся часть асинхронного двигателя — ротор, так же как и статор, имеет обмотку. Она помещена в пазах 1 стального цилиндра, набранного, как и сердечник статора, из листов электротехнической стали толщиной 0,5 мм. После штамповки листы собирают в пакет, плотно сжимают, насаживают на вал двигателя и закрепляют. В пазах ротора помещается или короткозамкнутая, или фазная обмотка. Изоляцией между листами ротора обычно служит пленка окисла. Активная сталь ротора является частью магнитной цепи двигателя.
Фазный ротор асинхронного двигателя 1 — сердечник ротора; 2 — обмотка ротора; 3 — контактное кольцо
Стальной лист ротора
Продольный разрез асинхронного двигателя с фазным ротором 1 — вал; 2 — активная сталь ротора; 3 — обмотка статора; 4 — станина; 5 — сталь статора; 6 — подшипниковый щит; 7 — контактные кольца; 8 — щетки; 9 — выводы
Беличье колесо Трехфазный асинхронный короткозамкнутый двигатель
а б в
Роторы короткозамкнутые а — с обычной клеткой; б — с двойной клеткой; в — с глубокой клеткой
Трехфазный асинхронный двигатель с фазным ротором
Короткозамкнутый ротор двигателя с алюминиевой литой обмоткой
Обмотка может быть фазной, построенной по тому же принципу, что и обмотка статора. Делается это в том случае, когда в фазы обмотки включается добавочное сопротивление (реостат), необходимый при пуске или регулирования скорости двигателя. Фазный ротор показан на рис. Обмотка ротора 2 соединяется в звезду, а выводы подключаются к трем контактным кольцам 3, насаженным на вал ротора и изолированным от вала и друг от друга. Контактные кольца изготавливаются из меди, бронзы, редко из стали.
Делается это в том случае, когда в фазы обмотки включается добавочное сопротивление (реостат), необходимый при пуске или регулирования скорости двигателя. Фазный ротор показан на рис. Обмотка ротора 2 соединяется в звезду, а выводы подключаются к трем контактным кольцам 3, насаженным на вал ротора и изолированным от вала и друг от друга. Контактные кольца изготавливаются из меди, бронзы, редко из стали.
Продольный разрез двигателя с фазным ротором показан на рис.
 Роторные обмотки также выполняют из меди и ее сплавов. В пазы прямоугольной или трапецеидальной формы забивают стержни, к стержням с обеих сторон припаивают твердым припоем замыкающие кольца.
Роторные обмотки также выполняют из меди и ее сплавов. В пазы прямоугольной или трапецеидальной формы забивают стержни, к стержням с обеих сторон припаивают твердым припоем замыкающие кольца.Вид двигателя с фазным ротором и с короткозамкнутым, имеющим внешний обдув для охлаждения, показан на рис.
Асинхронный двигатель с фазным ротором
Асинхронный двигатель с фазным ротором – это двигатель, который можно регулировать с помощью добавления в цепь ротора добавочных сопротивлений. Обычно такие двигатели применяются при пуске с нагрузкой на валу, так как увеличение сопротивления в цепи ротора, позволяет повысить пусковой момент и уменьшить пусковые токи. Этим асинхронный двигатель с фазным ротором выгодно отличается от АД с короткозамкнутым ротором.
Статор (3) выполнен, так же как и в обычном асинхронном двигателе, он представляет из себя полый цилиндр, набранный из листов электротехнической стали, в который уложена трехфазная обмотка.
Ротор (4) по сравнению с короткозамкнутым, представляет из себя более сложную конструкцию. Он состоит из сердечника в который уложена трехфазная обмотка, аналогично обмотке статора. Отсюда название двигателя. Если двигатель двухполюсный, то обмотки ротора смещены геометрически друг относительно друга на 120. Эти обмотки соединяются с тремя контактными кольцами (2), расположенными на валу (5) ротора. Контактные кольца выполнены из латуни или стали, причем друг от друга они изолированы. С помощью нескольких металлографитовых щеток (обычно двух), которые расположены на щеткодержателе (1) и прижимаются пружинами к кольцам, в цепь вводятся добавочные сопротивления. Выводы обмоток соединяются по схеме “звезда”.
Он состоит из сердечника в который уложена трехфазная обмотка, аналогично обмотке статора. Отсюда название двигателя. Если двигатель двухполюсный, то обмотки ротора смещены геометрически друг относительно друга на 120. Эти обмотки соединяются с тремя контактными кольцами (2), расположенными на валу (5) ротора. Контактные кольца выполнены из латуни или стали, причем друг от друга они изолированы. С помощью нескольких металлографитовых щеток (обычно двух), которые расположены на щеткодержателе (1) и прижимаются пружинами к кольцам, в цепь вводятся добавочные сопротивления. Выводы обмоток соединяются по схеме “звезда”.
Добавочное сопротивление вводится только при пуске двигателя. Причем им обычно служит ступенчатый реостат, сопротивление которого уменьшают с увеличением оборотов двигателя. Таким образом пуск двигателя осуществляется тоже ступенчато. После того, как разгон закончился и двигатель вышел на естественную механическую характеристику, обмотку ротора закорачивают. Для того, чтобы сохранить щетки и снизить потери на них, в двигателях с фазным ротором существует специальное устройство, которое поднимает щетки и замыкает кольца.
Добавочное сопротивление позволяет главным образом осуществить пуск двигателя под нагрузкой, работать с ним длительное время двигатель не может, так как механические характеристики слишком мягкие и работа двигателя на них нестабильна.
Для того чтобы автоматизировать пуск двигателя, в обмотку ротора включают индуктивность. В момент пуска, частота тока в роторе наибольшая, а значит и индуктивное сопротивление максимально. Затем, при разгоне двигателя, частота, как и сопротивление уменьшаются, и двигатель постепенно начинает работать в обычном режиме.
За счет усложнения своей конструкции, асинхронный двигатель с фазным ротором, обладает хорошими пусковыми и регулировочными характеристиками. Но по той же причине, его стоимость возрастает приблизительно в 1.5 по сравнению с обычным АД, кроме того увеличивается масса, размеры и как правило, уменьшается надежность двигателя.
Принцип работы асинхронного электродвигателя | Русэлт
Асинхронные электродвигатели – это устройства, главным назначением которых является преобразование энергии переменного электротока в механическую. Своим названием двигатель обязан асинхронному типу вращения ротора относительно частоты вращения магнитного поля, индуцирующего электроток в обмотке статора.
Своим названием двигатель обязан асинхронному типу вращения ротора относительно частоты вращения магнитного поля, индуцирующего электроток в обмотке статора.
Принцип работы на примере асинхронного электродвигателя трехфазного тока
Этот тип электрического двигателя наиболее часто применяется в различных сферах промышленности. Двигатель имеет 3-и обмотки на статоре, со смещением на 120 градусов. Обмотки запитаны переменным током и объединены по схеме «звезда» или «треугольник». При подаче напряжения на обмотку статора во всех трёх фазах появится магнитный поток.
Вместе с изменением частоты напряжения на обмотке статора, изменяется и магнитный поток. Фазы и магнитные потоки смещены относительно друг друга на сто двадцать градусов. Суммарный магнитный поток и будет вращающимся магнитным потоком, создающим электродвижущую силу (ЭДС). ЭДС, в замкнутой электроцепи обмотки ротора, индуцирует электроток. Во взаимодействии с магнитным потоком статора, ток создает пусковой момент электрического двигателя. Ротор начинает вращение в таком же направлении, что и магнитное поле статора при превышении пусковым моментом двигателя его тормозного момента.
Ротор начинает вращение в таком же направлении, что и магнитное поле статора при превышении пусковым моментом двигателя его тормозного момента.
Преимущества и недостатки асинхронных электродвигателей
Простота эксплуатации и хорошая ремонтопригодность – главные достоинства асинхронного двигателя, сделавшие его наиболее востребованным в очень разных сферах машиностроения и приборостроения. Привлекает и:
- Сравнительно невысокая цена;
- Надёжность
- Несложность подсоединения в общую электроцепь устройств.
Асинхронные электродвигатели имеют и ряд недостатков:
- Трудности с точным регулированием скорости;
- Большой пусковой ток;
- Относительно невысокий коэффициент мощности.
По типу обмотки ротора, короткозамкнутой или фазной, асинхронные двигатели, подразделяются на 2 типа:
- Электродвигатели с короткозамкнутым ротором имеют обмотку, замыкающуюся на сам ротор;
- Электродвигатели с фазным ротором – обмотку с концами, выведенными на щеточно-коллекторный узел.

Преимущество двигателя с фазным ротором в том, что скорость вращения можно регулировать путем подключения дополнительных сопротивлений (реостатного регулирования).
Асинхронные электродвигатели
Трехфазный асинхронный двигатель с короткозамкнутым ротором
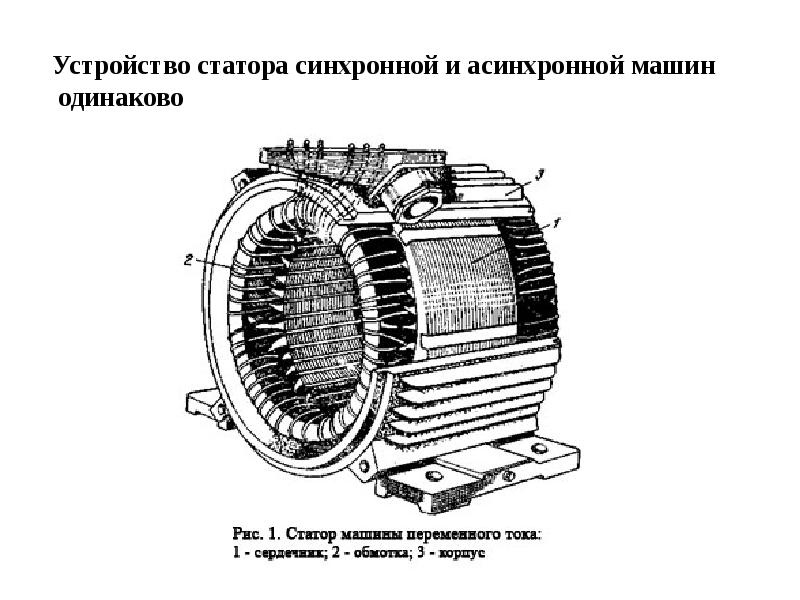
Статор асинхронного двигателя (рис. 187) состоит из сердечника 2, обмотки 3 и корпуса (станины) 1. Сердечник статора является частью магнитопровода и собран из отдельных стальных пластин 4 толщиной 0,35-0,5 мм. Чтобы снизить до минимума потери энергии на вихревые токи, пластины изолируют друг от друга (чаще всего тонким слоем специального лака). В пазах стального статора укладывают провода, образующие трехфазную обмотку статора. Каждая фазная обмотка состоит из одной или нескольких катушек и рассчитана на определенное номинальное фазное напряжение. На двигателе указывается два номинальных напряжения (например, 380 и 220 В), отличающихся в j/З раз.
При большем напряжении сети фазные обмотки статора соединяют звездой, а при меньшем напряжении – треугольником.
Расположение выводов обмоток на щитке (рис. 188) удобно для соединения обмоток звездой или треугольником. Сердечник статора с обмоткой расположен (обычно запрессован) внутри корпуса, кото-
Рис. 187. Статор асинхронного двигателя
рый отливают из чугуна или алюминиевого сплава. С боков сердечник статора закрывается крышками, в которых имеются подшипники.
Ротор двигателя представляет собой цилиндр, набранный из листовой электротехнической стали. Обмотка ротора состоит из нескольких медных стержней, соединенных на концах медными кольцами, и называется «беличьим колесом» (рис. 189, а). В новых асинхронных электродвигателях короткозамкнутая обмотка образуется путем заливки пазов ротора алюминием (рис. 189, б).
При прохождении по обмоткам статора трехфазного переменного тока создается магнитное поле, вращающееся с частотой п
Если имеются три катушки, то вращающийся магнитный поток имеет два полюса (/7=1) и пх – – 3000 об/мин. Если число катушек увеличить в 2 раза, то р = 2, а пх = = 1500 об/мин.
Магнитные линии поля статора пересекают обмотку ротора и в ней возникает ток, создающий свое магнитное поле. В результате взаимодействия магнитных полей ротор начинает вращаться в направлении магнитного поля статора с частотой п.
Ротор и поле статора вращаются с различными частотами. В противном случае не было бы пересечения ротора силовыми линиями магнитного поля статора. Отношение разности частот вращающегося поля статора пх и ротора п к частоте магнитного поля статора называют скольжением (отставанием): 5 = (п, – п)/пх, или 5 = (п, – п)!пхX Х100%. При пуске двигателя п = 0, а 5 = 1, или 100%.
Во время холостого хода двигатель имеет минимальное скольжение (1-2%). С увеличением нагрузки уменьшается частота вращения ротора и увеличивается скольжение при номинальной нагрузке, достигая 5-6%.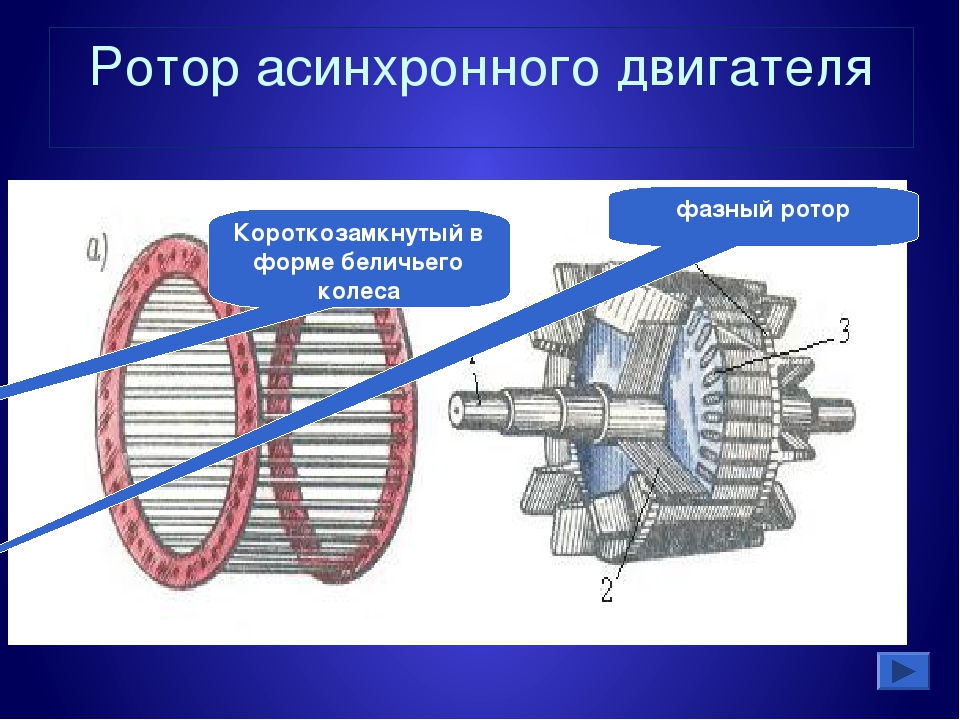
Электромагнитная связь обмоток ротора и статора аналогична электромагнитной связи обмоток трансформатора. Поэтому с увеличением скольжения, когда линии магнитного поля статора чаще пересекают ротор, увеличивается ток в обмотках ротора и статора.
Частота тока в обмотке ротора зависит от скольжения: /2 = /х5. При пуске 5=1 и /2 = /х = 50 Гц. С возрастанием частоты враще-
Рис. 188. Расположение выводов обмоток на щитке (а) и соединение обмоток звездой (б) и треугольником (е)
Рис. 189. Короткозамкнутая обмотка ротора (а) и короткозамкнутая обмотка ротора, выполненная в виде алюминиевой отливки (б):
/- короткозамыкающие кольца; 2 – листы магнитопривода; 3 – вентиляционные лопатки; 4 – стержни ния ротора п уменьшается скольжение S и частота /2. При холостом ходе двигателя /2 = ІЧ-4 Гц.
Благодаря простоте устройства, дешевизне и большой надежности в работе короткозамкнутые асинхронные двигатели получили широкое распространение. К недостаткам короткозамкнутых асинхронных двигателей относятся: значительное потребление тока в момент пуска; слабый пусковой вращающий момент; потребление реактивного тока из-за индуктивности обмоток статора, вызывающее снижение cos ф.
К недостаткам короткозамкнутых асинхронных двигателей относятся: значительное потребление тока в момент пуска; слабый пусковой вращающий момент; потребление реактивного тока из-за индуктивности обмоток статора, вызывающее снижение cos ф.
При пуске двигателя магнитное поле статора с максимальной частотой пересекает неподвижный ротор и в нем наводится наибольшая э. д. с. В результате этого ток в обмотках ротора и статора больше номинального в 5-8 раз. Пусковые токи не успевают нагреть машину до высокой температуры, но вызывают снижение напряжения в сети, что отрицательно влияет на работу других потребителей, включенных в эту же сеть.
Вращающий момент М асинхронного двигателя образуется в результате взаимодействия магнитного потока Ф статора с активной составляющей тока ротора /а2 = /2cos ф2. Следовательно, М = = C®/2cos ф2, где С – коэффициент, зависящий от конструкции двигателя; ф2 – разность фаз э. д. с. ?2 и тока /2 ротора.
При пуске в короткозамкнутом роторе асинхронного двигателя возникает ток наибольшей частоты /2. Поэтому индуктивное сопротивление ротора XL2 = 2лf2L2 значительно больше активного г2. Активная составляющая тока ротора /2cos ф2 = /2г2/]/г\ х?2 и вращающий момент не достигают максимального значения. С увеличением скорости частота /2 тока в роторе и его индуктивное сопротивление начнут уменьшаться, что в свою очередь вызовет увеличение активной составляющей тока ротора и вращающего момента двигателя. Вращающий момент асинхронного двигателя достигает наи большего значения при равенстве активного и индуктивного сопротивлений ротора, т. е. при г2 = ХЬ2.
При дальнейшем увеличении частоты вращения это равенство нарушается, т. е.
< г2 и вращающий момент вновь начнет уменьшаться.
При скольжении 5 = 1 (рис. 190) двигатель развивает пусковой момент /Ип, при номинальном скольжении 5Н = 0,02+-0,06- номинальный момент Мн. Максимальный момент /ИтаХ двигатель развивает при скольжении, называемом критическим (5кр я» 0,2).
Максимальный момент /ИтаХ двигатель развивает при скольжении, называемом критическим (5кр я» 0,2).
Трехфазные асинхронные электродвигатели с короткозамкнутым ротором типа МСТ применяют в стрелочных электроприводах. Основные характеристики этих электродвигателей приведены в табл. 11.
Электродвигатели типов МСТ-0,25 и МСТ-0,3 устанавливают в электроприводах тяжелых и обычных стрелок электрической централизации, типа МСТ-0,6 – в электроприводах стрелок маневровых районов.
Для увеличения начального вращающего момента, необходимого для перевода стрелок, короткозамкнутую обмотку ротора стрелочных электродвигателей выполняют с повышенным активным сопротивлением. Изменение направления вращения ротора электродвигателя осуществляется переменой мест двух линейных проводов, подводящих ток к электродвигателю. При этом изменяется направление вращения магнитного поля статора, а следовательно, и ротора. Асинхронные электродвигатели малой мощности включают в сеть перемен
Г!лс.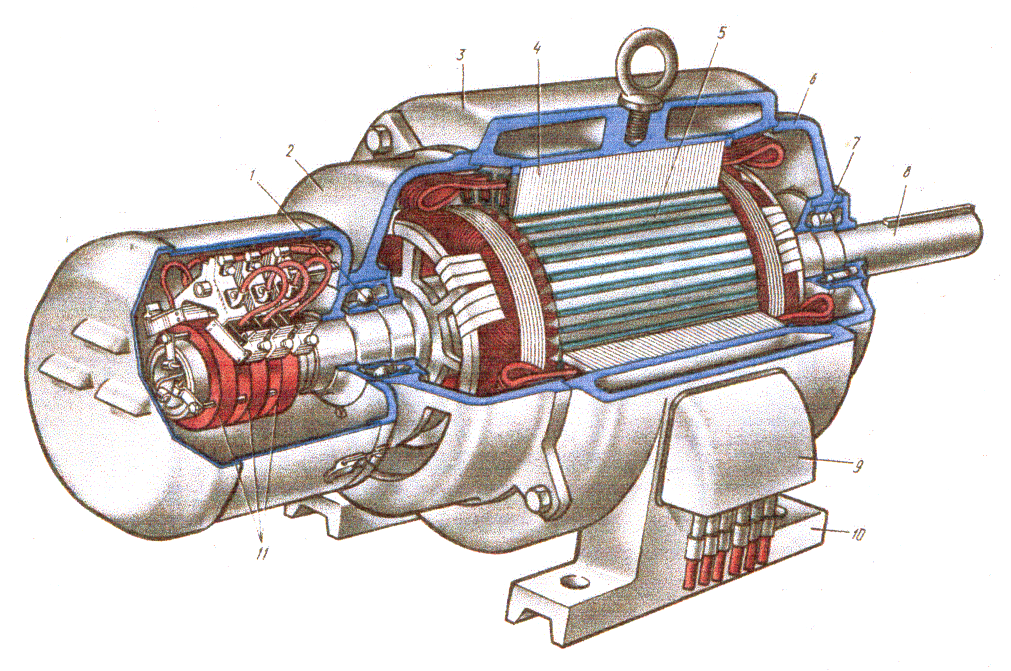 190. Зависимость вращающего момента асинхронного двигателя от скольжения
190. Зависимость вращающего момента асинхронного двигателя от скольжения
Таблица 11
Тип электро- | МОЩНОСТЬ, | Напряжение питання, В, при соединении обмоток | Потребляе- | Частота вращения ротора, об/мин | |
двигателя | Вт | звездой | треугольни ком | мый ток, А | |
МСТ-0,25 | 250 | 220 | 127 | 1,4/2,4* | 1250±50 |
МСТ-0,3 | 300 | 190+5,? – 9,5 | но±53?5 | 2,1/3,6 | 850+42,5 |
МСТ-0.3А | 300 | 330±|?,6 | 190±и. | 1,2/2,1 | 850+42,5 |
МСТ-0,6 | 600 | 190±в”6 | Н0±1;\ | 2,8/4,85 | 2850+285 |
МСТ-0. | 600 | ззо±ї“,5 | юо±и. | 2/3,46 | 2850+285 |
 6А
6А* В числителе указывается потребляемый ток при соединении обмоток звездой, в зна-менатсле – при соединении обмоток треугольником.
ного тока без пусковых приспособлений. При значительных мощностях (более 5 кВт) пусковой ток ограничивают.
Существуют два способа пуска в ход короткозамкнутых асинхронных электродвигателей. Непосредственный (прямой) пуск применяют в случае, если мощность двигателя значительно меньше мощности сети. Пуск переключением обмоток со звезды на треугольник можно использовать в том случае, если обмотки статора двигателя постоянно должны быть соединены треугольником. Для того чтобы снизить пусковой ток, на период пуска обмотки статора соединяют звездой (рис. 191, а). Благодаря этому напряжение на каждой обмотке снизится в ]1 3 раз, а линейный ток уменьшится в 3 раза. Когда двигатель разовьет скорость, переключают рубильник Р2 и обмотки соединяют треугольником.
Для снижения пускового тока последовательно с обмоткой статора можно включать элементы с активным или индуктивным сопротивлением (рис. 191, б и в). После пуска эти элементы шунтируются.
Однофазный асинхронный двигатель. Обмотка статора однофазного асинхронного двигателя состоит из одной катушки. Ток, проходящий по этой катушке, создает пульсирующий магнитный поток, который можно разложить на два вращающихся магнитных потока Фх и Ф2, имеющих одинаковую величину, но разное направление вращения.
Первый магнитный поток вращается (относительно неподвижного ротора) с частотой пх по движению часовой стрелки, а второй – с такой же частотой – в противоположном направлении. При пуске моменты Мх и М2, создаваемые каждым вращающимся потоком, равны, но направлены в противоположные стороны. В результате пусковой вращающий момент М – Мх – М2 = 0. Если ротору сообщить первоначальное движение, например по движению часовой стрелки, то вращающийся в этом же направлении магнитный поток Фх будет
Рис.191. Схемы пуска асинхронного двигателя:
а переключением обмоток статора со звезды на треугольник; б, в – с коротко-замкнутым роторам с помощью соответственно активных и индуктивных элементов действовать на ротор, как и в трехфазном короткозамкнутом двигателе. Магнитный поток Ф2, вращающийся относительно ротора в противоположном направленні!, будет индуцировать в роторе токи большей частоты. Индуктивное сопротивление ротора для этой частоты возрастет и еще больше будет отличаться от активного сопротивления. В результате этого вращающий момент Л42 уменьшится. Результирующий вращающий момент М = М, – М2 будет направлен в сторону первоначального движения ротора.
Пусковой вращающий момент в однофазном асинхронном двигателе (рис. 192) может быть получен за счет дополнительной пусковой обмотки ПО, которую укладывают в пазах статора под углом 90° к главной обмотке ГО. Ток !х главной обмотки отстает по фазе от напряжения и на угол чд. Последовательно с пусковой обмоткой включен конденсатор С, и ток /2 опережает по фазе напряжение на угол <р2. Поэтому токи в обмотках сдвинуты на угол ф1 – <р2 = 90е и в машине возникает вращающееся магнитное поле, которое создает пусковой момент. Однофазные асинхронные конденсаторные двигатели типа АСОМ-48 устанавливают в кодовых путевых трансмиттерах, которые применяют в устройствах кодовой автоблокировки и автоматической локомотивной сигнализации. Электродвигатель может питаться от источника с переменным напряжением 110 В частотой 50 и 75 Гц. При частоте 50 Гц в электрическую схему двигателя включают конденсатор емкостью 6 мкФ (рис. 193, а), при частоте 75 Гц – конденсатор емкостью 2 мкФ (рис. 193, б). Основные характеристики электродвигателя типа АСОМ-48: полная мощность 16,5 В – А; полезная мощность 3,5 Вт; к. п. д. 0,3; частота вращения якоря при частоте 50 Гц 982 об/мин, при частоте 75 Гц – 1473 об/мин.
В однофазную сеть можно включать трехфазные асинхронные двигатели (рис. -0,9.
-0,9.
⇐Путевые дроссель-трансформаторы | Электропитающие устройства и линейные сооружения автоматики, телемеханики и связи железнодорожного транспорта | Синхронные генераторы⇒
Асинхронный электродвигатель: виды и принцип работы
В наши дни электрооборудование выглядит совсем иначе, чем изобретение российского электротехника, но по-прежнему используются для превращения электрической энергии в механическую. Надежность в работе, простая конструкция и невысокая себестоимость были по достоинству оценены покупателями. Сегодня асинхронные двигатели — наиболее распространенный во всем мире тип моторов. Их используют для комплектации промышленного оборудования, бытовой техники и электроинструментов в девяти случаев из десяти.
Какие бывают виды асинхронных механизмов
Асинхронный мотор имеет самую простую конструкцию. Классическое устройство электродвигателя состоит из статора, а также ротора.
Статор выполнен в форме классического цилиндра. Для изготовления статора производители используют тонкие стальные листы, обмотка в пазах сердечника сделана из специального провода. Оси обмоток расположены друг к другу под углом 120°. Их концы соединяются по-разному — все зависит от допустимой величины напряжения. В одних случаях соединение напоминаем звезду, в других – треугольник.
Для изготовления статора производители используют тонкие стальные листы, обмотка в пазах сердечника сделана из специального провода. Оси обмоток расположены друг к другу под углом 120°. Их концы соединяются по-разному — все зависит от допустимой величины напряжения. В одних случаях соединение напоминаем звезду, в других – треугольник.
В отличие от статора, роторы бывают нескольких типов. Производители классифицируют выпущенные моторы именно по типу ротора — виды асинхронных двигателей: с короткозамкнутым и фазным ротором. Давайте рассмотрим каждый их подробнее.
- Фазный — это ротор с трехфазной обмоткой, которая напоминает обмотку статора. Ее концы соединяются в форме звезды, края крепятся к контактным кольцам. К этим же кольцам присоединяются добавочные резисторы, которые меняют активное сопротивление в цепи и уменьшают большие пусковые токи.
- Короткозамкнутый ротор — сердечник, изготовленный из стальных листов. Для серийного производства, как правило, используется расплавленный алюминий, который заливается и образовывает стержни между торцевых колец.
 Конструкция ротора получила в обиходе название «беличья клетка», так как внешне напоминает бочку для грызунов. Когда заходит речь об изготовлении мощных двигателей, производители используют не алюминий, а медь.
Конструкция ротора получила в обиходе название «беличья клетка», так как внешне напоминает бочку для грызунов. Когда заходит речь об изготовлении мощных двигателей, производители используют не алюминий, а медь.
Асинхронный электродвигатель: принцип работы
Напряжение подается на обмотку статора. В этот момент возникает магнитный поток, величина которого меняется с изменением частоты напряжения. Потоки сдвинуты во времени и пространстве по отношению друг к другу на 120°. Вращающим оказывается результирующий магнитный поток, который движется, тем самым создавая в проводниках ротора ЭДС. Обмотка ротора исполняет роль замкнутой электрической цепи, в ней появляется ток, который, взаимодействуя с потоками статора, создает пусковой момент. Мотор стремится повернуть ротор в направлении движения магнитного поля статора. В тот момент, когда он достигает значения тормозного момента ротора и превышает его, ротор начинает вращаться, вызывая скольжение.
Что такое скольжение? Это величина, которая показывает нам, насколько синхронная частота магнитного поля статора больше, чем частота вращения ротора.
S = ((n1 – n2)/n1) х 100 %, где:
S – скольжение;
n1 – синхронная частота магнитного поля статора, n2 – ротора.
Почему так важно скольжение? Его используют для характеристики асинхронных электродвигателей, ведь изначально скольжение равно единице, но по мере роста n1 относительная разность частот n1-n2 становится меньше. В результате этого, падает ЭДС и ток в проводниках ротора, что в свою очередь приводит к уменьшению вращающего момента. Если провести анализ, в состоянии холостого хода, в тот момент, когда мотор работает без нагрузки на валу, показатель скольжения минимален. Как только возрастает статический момент, скольжение растет до величины Skp — критического скольжения. Этот показатель очень важен, ведь как только будет превышена точка критического скольжения, асинхронные двигатели перестают стабильно работать. Значение скольжения колеблется в пределах от нуля до единицы, асинхронных моторов универсального назначения в номинальном режиме до 8 %. Как только наступает равновесие между электромагнитным и тормозным моментом изменение величин прекратится.
Как только наступает равновесие между электромагнитным и тормозным моментом изменение величин прекратится.
Если говорить простыми словами, принцип работы мотора состоит во взаимодействии вращающегося магнитного поля статора и токов, которые наводятся этим магнитным полем в роторе. Вращающий момент возникает только тогда, когда появляется разность частот вращения магнитных полей.
Короткозамкнутый ротор что это такое
Как вы знаете, асинхронные электродвигатели имеют трехфазную обмотку (три отдельные обмотки) статора, которая может формировать разное количество пар магнитных полюсов в зависимости от своей конструкции, что влияет в свою очередь на номинальные обороты двигателя при номинальной частоте питающего трехфазного напряжения. При этом роторы двигателей данного типа могут отличаться, и у асинхронных двигателей они бывают короткозамкнутыми или фазными. Чем отличается короткозамкнутый ротор от фазного ротора — об этом и пойдет речь в данной статье.
Короткозамкнутый ротор
Представления о явлении электромагнитной индукции подскажут нам, что произойдет с замкнутым витком проводника, помещенным во вращающееся магнитное поле, подобное магнитному полю статора асинхронного двигателя. Если поместить такой виток внутри статора, то когда ток на обмотку статора будет подан, в витке будет индуцироваться ЭДС, и появится ток, то есть картина примет вид: виток с током в магнитном поле. Тогда на такой виток (замкнутый контур) станет действовать пара сил Ампера, и виток начнет поворачиваться вслед за движением магнитного потока.
Если поместить такой виток внутри статора, то когда ток на обмотку статора будет подан, в витке будет индуцироваться ЭДС, и появится ток, то есть картина примет вид: виток с током в магнитном поле. Тогда на такой виток (замкнутый контур) станет действовать пара сил Ампера, и виток начнет поворачиваться вслед за движением магнитного потока.
Так и работает асинхронный двигатель с короткозамкнутым ротором, только вместо витка на его роторе расположены медные или алюминиевые стержни, замкнутые накоротко между собой кольцами с торцов сердечника ротора. Ротор с такими короткозамкнутыми стержнями и называют короткозамкнутым или ротором типа «беличья клетка» поскольку расположенные на роторе стержни напоминают беличье колесо.
Проходящий по обмоткам статора переменный ток, порождающий вращающееся магнитное поле, наводит ток в замкнутых контурах «беличьей клетки», и весь ротор приходит во вращение, поскольку в каждый момент времени разные пары стержней ротора будут иметь различные индуцируемые токи: какие-то стержни — большие токи, какие-то — меньшие, в зависимости от положения тех или иных стержней относительно поля.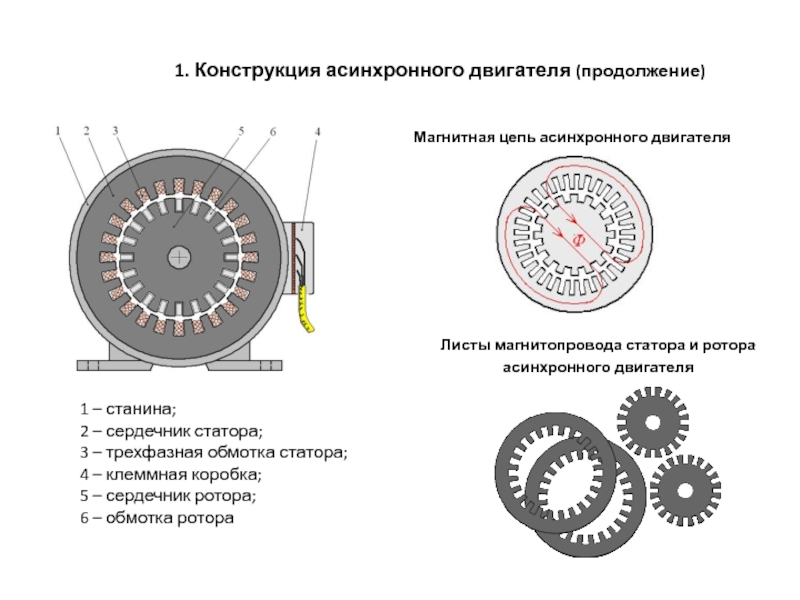 И моменты никогда не будут уравновешивать ротор, поэтому он и будет вращаться, пока по обмоткам статора течет переменный ток.
И моменты никогда не будут уравновешивать ротор, поэтому он и будет вращаться, пока по обмоткам статора течет переменный ток.
К тому же стержни «беличьей клетки» немного наклонены по отношению к оси вращения — они не параллельны валу. Наклон сделан для того, чтобы момент вращения сохранялся постоянным и не пульсировал, кроме того наклон стержней позволяет снизить действие высших гармоник индуцируемых в стержнях ЭДС. Будь стержни без наклона — магнитное поле в роторе пульсировало бы.
Скольжение s
Для асинхронных двигателей всегда характерно скольжение s, возникающее из-за того, что синхронная частота вращающегося магнитного поля n1 статора выше реальной частоты вращения ротора n2.
Скольжение возникает потому, что индуцируемая в стержнях ЭДС может иметь место только при движении стержней относительно магнитного поля, то есть ротор всегда вынужден хоть немного, но отставать по скорости от магнитного поля статора. Величина скольжения равна s = (n1-n2)/n1.
Если бы ротор вращался с синхронной частотой магнитного поля статора, то в стержнях ротора не индуцировался бы ток, и ротор бы просто не стал вращаться. Поэтому ротор в асинхронном двигателе никогда не достигает синхронной частоты вращения магнитного поля статора, и всегда хоть чуть-чуть (даже если нагрузка на валу критически мала), но отстает по частоте вращения от частоты синхронной.
Скольжение s измеряется в процентах, и на холостом ходу практически приближается к 0, когда момент противодействия со стороны ротора почти отсутствует. При коротком замыкании (ротор застопорен) скольжение равно 1.
Вообще скольжение у асинхронных двигателей с короткозамкнутым ротором зависит от нагрузки и измеряется в процентах. Номинальное скольжение — это скольжение при номинальной механической нагрузке на валу в условиях, когда напряжение питания соответствует номиналу двигателя.
Другие статьи про асинхронные двигатели с короткозамкнутым ротором на Электрик Инфо:
Фазный ротор
Асинхронные двигатели с фазным ротором, в отличие от асинхронных двигателей с короткозамкнутым ротором, имеют на роторе полноценную трехфазную обмотку. Подобно тому, как на статоре уложена трехфазная обмотка, так же и в пазах фазного ротора уложена трехфазная обмотка.
Подобно тому, как на статоре уложена трехфазная обмотка, так же и в пазах фазного ротора уложена трехфазная обмотка.
Выводы обмотки фазного ротора присоединены к контактным кольцам, насаженным на вал, и изолированным друг от друга и от вала. Обмотка фазного ротора состоит из трех частей — каждая на свою фазу — которые чаще всего соединены по схеме «звезда».
К обмотке ротора через контактные кольца и щетки присоединяется регулировочный реостат. Краны и лифты, например, пускаются под нагрузкой, и здесь необходимо развивать существенный рабочий момент. Невзирая на усложненность конструкции, асинхронные двигатели с фазным ротором обладают лучшими регулировочными возможностями касательно рабочего момента на валу, чем асинхронные двигатели с короткозамкнутым ротором, которым требуется промышленный частотный преобразователь.
Обмотка статора асинхронного двигателя с фазным ротором выполняется аналогично тому, как и на статорах асинхронных двигателей с короткозамкнутым ротором, и аналогичным путем создает, в зависимости от количества катушек (три, шесть, девять или более катушек), два, четыре и т.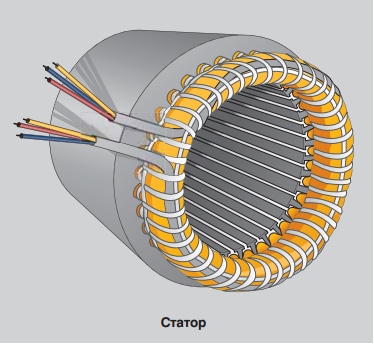 д. полюсов. Катушки статора сдвинуты между собой на 120, 60, 40 и т. д. градусов. При этом на фазном роторе делается столько же полюсов, сколько и на статоре.
д. полюсов. Катушки статора сдвинуты между собой на 120, 60, 40 и т. д. градусов. При этом на фазном роторе делается столько же полюсов, сколько и на статоре.
Регулируя ток в обмотках ротора, регулируют рабочий момент двигателя и величину скольжения. Когда регулировочный реостат полностью выведен, то для уменьшения износа щеток и колец их закорачивают при помощи специального приспособления для подъема щеток.
Устройство, виды и принцип действия асинхронных электродвигателей
Наука в области электричества в XIX и XX веках стремительно развивалась, что привело к созданию электрических асинхронных двигателей. С помощью таких устройств развитие промышленной индустрии шагнуло далеко вперед и теперь невозможно представить заводы и фабрики без силовых машин с использованием асинхронных электродвигателей.
История появления
История создания асинхронного электродвигателя начинается в 1888 году, когда Никола Тесла запатентовал схему электродвигателя, в этом же году другой ученый в области электротехники Галлилео Феррарис опубликовал статью о теоретических аспектах работы асинхронной машины.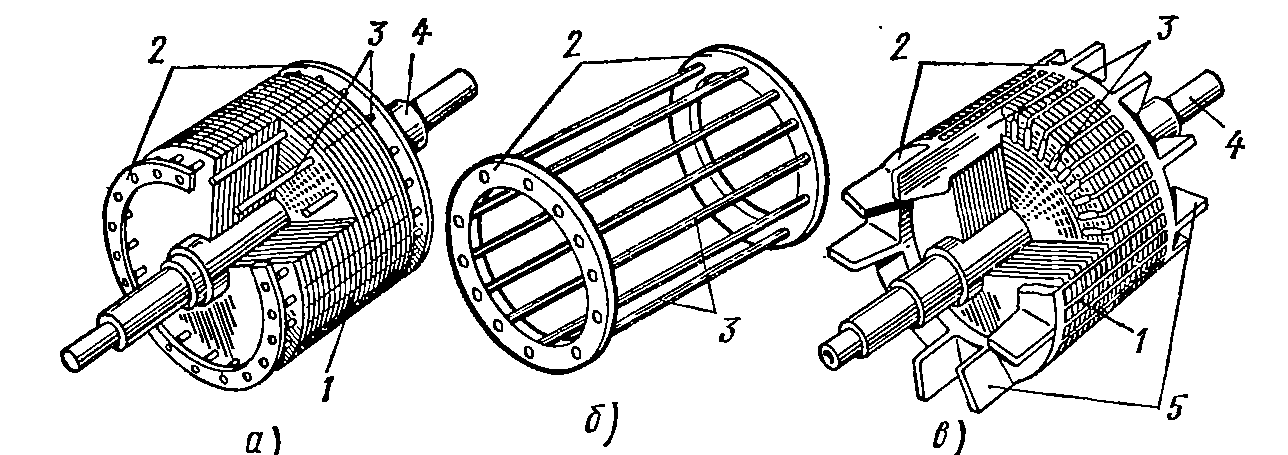
В 1889 году российский физик Михаил Осипович Доливо-Добровольский получил в Германии патент на асинхронный трехфазный электрический двигатель.
Все эти изобретения позволили усовершенствовать электрические машины и привели к тому, что в промышленность стали массово применяться электрические машины, которые значительно ускорили все технологические процессы на производстве, повысили эффективность работы и снизили её трудоемкость.
В настоящий момент самый распространенный электродвигатель, эксплуатируемый в промышленности, является прототипом электрической машины, созданной Доливо-Добровольским.
Устройство и принцип действия асинхронного двигателя
Главными компонентами асинхронного электродвигателя являются статор и ротор, которые отделены друг от друга воздушным зазором. Активную работу в двигателе выполняют обмотки и сердечник ротора.
Под асинхронностью двигателя понимают отличие частоты вращения ротора от частоты вращения электромагнитного поля.
Статор – это неподвижная часть двигателя, сердечник которой выполняется из электротехнической стали и монтируется в станину. Станина выполняется литым способом из материала, который не магнитится (чугун, алюминий). Обмотки статора являются трехфазной системой, в которой провода уложены в пазы с углом отклонения 120 градусов. Фазы обмоток стандартно подключают к сети по схемам «звезда» или «треугольник».
Ротор – это подвижная часть двигателя. Роторы асинхронных электродвигателей бывают двух видов: с короткозамкнутым и фазным роторами. Данные виды отличаются между собой конструкциями обмотки ротора.
Асинхронный двигатель с короткозамкнутым ротором
Такой тип электрической машины был впервые запатентован М.О. Доливо-Добровольским и в народе называется «беличье колесо» из-за внешнего вида конструкции. Короткозамкнутая обмотка ротора состоит из накоротко замкнутых с помощью колец стержней из меди (алюминия, латуни) и вставленные в пазы обмотки сердечника ротора. Такой тип ротора не имеет подвижных контактов, поэтому такие двигатели очень надежны и долговечны при эксплуатации.
Такой тип ротора не имеет подвижных контактов, поэтому такие двигатели очень надежны и долговечны при эксплуатации.
Асинхронный двигатель с фазным ротором
Такое устройство позволяет регулировать скорость работы в широком диапазоне. Фазный ротор представляет собой трехфазную обмотку, которая соединяется по схемам «звезда» или треугольник. В таких электродвигателях в конструкции имеются специальные щетки, с помощью которых можно регулировать скорость движения ротора. Если в механизм такого двигателя добавить специальный реостат, то при пуске двигателя уменьшится активное сопротивление и тем самым уменьшатся пусковые токи, которые пагубно влияют на электрическую сеть и само устройство.
Принцип действия
При подаче электрического тока на обмотки статора возникает магнитный поток. Так как фазы смещены относительно друг друга на 120 градусов, то из-за этого поток в обмотках вращается. Если ротор короткозамкнутый, то при таком вращении в роторе появляется ток, который создает электромагнитное поле. Взаимодействуя друг с другом, магнитные поля ротора и статора заставляют ротор электродвигателя вращаться. В случае, если ротор фазный, то напряжение подается на статор и ротор одновременно, в каждом механизме появляется магнитное поле, они взаимодействуют друг с другом и вращают ротор.
Взаимодействуя друг с другом, магнитные поля ротора и статора заставляют ротор электродвигателя вращаться. В случае, если ротор фазный, то напряжение подается на статор и ротор одновременно, в каждом механизме появляется магнитное поле, они взаимодействуют друг с другом и вращают ротор.
Достоинства асинхронных электродвигателей
Недостатки асинхронных электродвигателей
Асинхронные электродвигатели являются очень эффективными устройствами с отличными механическими характеристиками, и благодаря этому они являются лидерами по частоте применения.
Режимы работы
Электродвигатель асинхронного типа универсальный механизм и по продолжительности работы имеет несколько режимов:
- Продолжительный;
- Кратковременный;
- Периодический;
- Повторно-кратковременный;
- Особый.
Продолжительный режим – основной режим работы асинхронных устройств, который характеризуется постоянной работой электродвигателя без отключений с неизменной нагрузкой. Такой режим работы самый распространенный, используется на промышленных предприятиях повсеместно.
Такой режим работы самый распространенный, используется на промышленных предприятиях повсеместно.
Кратковременный режим – работает до достижения постоянной нагрузки определенное время (от 10 до 90 минут), не успевая максимально разогреться. После этого отключается. Такой режим используют при подаче рабочих веществ (воду, нефть, газ) и прочих ситуациях.
Периодический режим – продолжительность работы имеет определенное значение и по завершении цикла работ отключается. Режим работы пуск-работа-остановка. При этом он может отключаться на время, за которое не успевает остыть до внешних температур и включаться заново.
Повторно-кратковременный режим – двигатель не нагревается максимально, но и не успевает остыть до внешней температуры. Применяется в лифтах, эскалаторах и прочих устройствах.
Особый режим – продолжительность и период включения произвольный.
В электротехнике существует принцип обратимости электрических машин — это означает, что устройство может, как преобразовывать электрическую энергию в механическую, так и совершать обратные действия.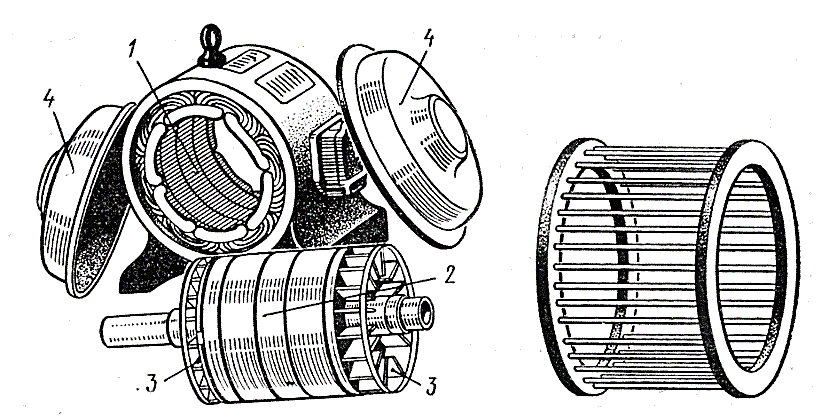
Асинхронные электродвигатели тоже соответствуют этому принципу и имеют двигательный и генераторный режим работы.
Двигательный режим – основной режим работы асинхронного электродвигателя. При подаче напряжения на обмотки возникает электромагнитный вращающий момент, увлекающий за собой ротор с валом и, таким образом, вал начинает вращаться, двигатель выходит на постоянную частоту вращения, совершая полезную работу.
Генераторный режим – основан на принципе возбуждения электрического тока в обмотках двигателя при вращении ротора. Если вращать ротор двигателя механическим способом, то на обмотках статора образуется электродвижущая сила, при наличии конденсатора в обмотках возникает емкостный ток. Если емкость конденсатора будет определенного значения, зависящего от характеристик двигателя, то произойдет самовозбуждение генератора и возникнет трехфазная система напряжений. Таким образом короткозамкнутый электродвигатель будет работать как генератор.
Регулирование частоты вращения асинхронных двигателей
Для регулирования частоты вращения асинхронных электродвигателей и управления режимами их работы существуют следующие способы:
- Частотный – при изменении частоты тока в электрической сети изменяется частота вращения электрического двигателя. Для такого способа применяют устройство, которое называется частотный преобразователь;
- Реостатный – при изменении сопротивления реостата в роторе, изменяется частота вращения. Такой способ увеличивает пусковой момент и критическое скольжение;
- Импульсный – способ управления, при котором на двигатель подается напряжение специального вида.
- Переключение обмоток по время работы электрического двигателя со схемы «звезда» на схему «треугольник», что снижает пусковые токи;
- Управление с изменения пар полюсов для короткозамкнутых роторов;
- Подключение индуктивного сопротивления для двигателей с фазным ротором.

С развитием электронных систем, управление различными электродвигателями асинхронного типа становится все более эффективным и точным. Такие двигатели используются в мире повсеместно, разнообразие задач, выполняемых такими механизмами, с каждым днем растет, и потребность в них не уменьшается.
Фазный ротор электродвигателя
Широкое распространение асинхронного электродвигателя (АД) вызвано его надежностью и простотой конструкции. Статор такого двигателя стандартный, представляет собой изготовленный из пластин электростатической стали полый цилиндр с трехфазной обмоткой. Ротор же может быть короткозамкнутым и фазным. Последний вариант получил более широкое распространение по ряду причин, хотя его конструкция намного сложнее, чем у короткозамкнутого ротора.
Конструкция фазного ротора
Фазный ротор АД конструктивно напоминает его статор. Основа ротора набирается из пластин электростатической стали, которые насаживаются на вал. Конструкция имеет продольные пазы, в которые укладываются витки катушек фазной обмотки. Количество фаз ротора строго соответствует количеству фаз статора. Для подключения обмотки ротора к цепи, на валу последнего устанавливаются 3 контактных кольца, к которым подведены концы обмотки, находящиеся в соприкосновении с токопроводящими щетками. В свою очередь щетки имеют выходы в коробку корпуса, что позволят подключать внешнее дополнительное сопротивление.
Количество фаз ротора строго соответствует количеству фаз статора. Для подключения обмотки ротора к цепи, на валу последнего устанавливаются 3 контактных кольца, к которым подведены концы обмотки, находящиеся в соприкосновении с токопроводящими щетками. В свою очередь щетки имеют выходы в коробку корпуса, что позволят подключать внешнее дополнительное сопротивление.
В зависимости от напряжения сети, фазы обмотки соединяются “треугольником” или “звездой”. Оси катушек двухполюсного электродвигателя смещены на 120 градусов относительно друг друга.
Контактные кольца изготавливаются из латуни или стали. На вал они посажены с обязательной изоляцией между собой. Щетки расположены на щеткодержатле, изготовлены из металлографита, к кольцам прижимаются посредством пружин.
Зачем нужно добавочное сопротивление?
Добавочное сопротивление служит для запуска двигателя с нагрузкой на его валу. Как только достигаются номинальные обороты вала, сопротивление отключается за ненадобность, а кольца закорачиваются. В противном случае работа электродвигателя будет нестабильной, возникнут потери КПД.
В противном случае работа электродвигателя будет нестабильной, возникнут потери КПД.
Роль добавочного внешнего сопротивления, как правило, выполняет ступенчатый реостат. В этом случае двигатель будет разгонятся тоже ступенчато. Часто используются устройства, способные поднять КПД двигателя, при этом избавляя щетки от излишнего трения о кольца. После разгона устройство поднимает щетки и замыкает кольца.
Для реализации автоматического пуска электродвигателя используется подключенная индуктивность к обмотке ротора. Дело в том, что в тот момент, когда осуществляется пуск, в роторе показатели индуктивности и частоты тока максимальны. При разгоне двигателя эти показатели падают, а в конечном итоге двигатель выходит на нормальный рабочий режим.
Отличие короткозамкнутого ротора от фазного
В короткозамкнутом роторе электродвигателя, в отличие от фазного варианта, нет обмоток. Их заменяют замкнутые с торцов между собой кольцами стержни, изготовленные из алюминия или меди. Визуально конструкция такого ротора напоминает беличье колесо, от чего он и получил свое название — “беличья клетка”.
Визуально конструкция такого ротора напоминает беличье колесо, от чего он и получил свое название — “беличья клетка”.
Короткозамкнутый ротор приводится во вращение за счет наведения тока магнитным полем статора. Чтобы исключить пульсирование магнитного поля в роторе, стержни “беличьей клетки” располагаются параллельно между собой, но под наклоном относительно оси вращения. АД с короткозамкнутым ротором обладают высокой надежностью за счет отсутствия щеток, которые со временем перетираются. Кроме того, их стоимость меньше, чем у вариантов с фазным ротором.
Преимущества и недостатки электродвигателя с фазным ротором
Широкое распространение АД с фазным ротором получил за счет ряда серьезных преимуществ перед другими машинами подобного рода. Среди них следует отметить большой вращающий момент при запуске, а также относительно постоянную скорость вращения даже при высоких нагрузках. Такие электродвигатели для запуска требуют меньший пусковой ток, а конструкция позволяет использовать автоматические пусковые устройства. Кроме того, эти электрические машины хорошо переносят продолжительные перегрузки.
Кроме того, эти электрические машины хорошо переносят продолжительные перегрузки.
Как и любой электрический механизм, электродвигатели с фазным ротором имеют ряд недостатков:
- Чувствительность к перепадам напряжения;
- Большие габаритные размеры
- Высокая стоимость;;
- Более сложная конструкция за счет цепи ротора с добавочным сопротивлением;
- Меньшие показатели коэффициента мощности и КПД (относительно АД с короткозамкнутым ротором).
Область применения электродвигателей с фазным ротором
Ад с фазным ротором, за счет высокого крутящего момента, низких пусковых токов и способности долговременно работать при повышенных нагрузках, используются там, где необходима большая мощность электродвигателя, но нет необходимости плавно регулировать скорость вращения в широких диапазонах. Кроме того, эти машины отлично приспособлены под пуск с нагрузкой на валу.
За счет высокой производительности, наиболее часто АД с фазным ротором используются на различном серьезном, тяжелом силовом оборудовании, например, подъемных кранах, лифтовых приводах, станках, различных подъемниках.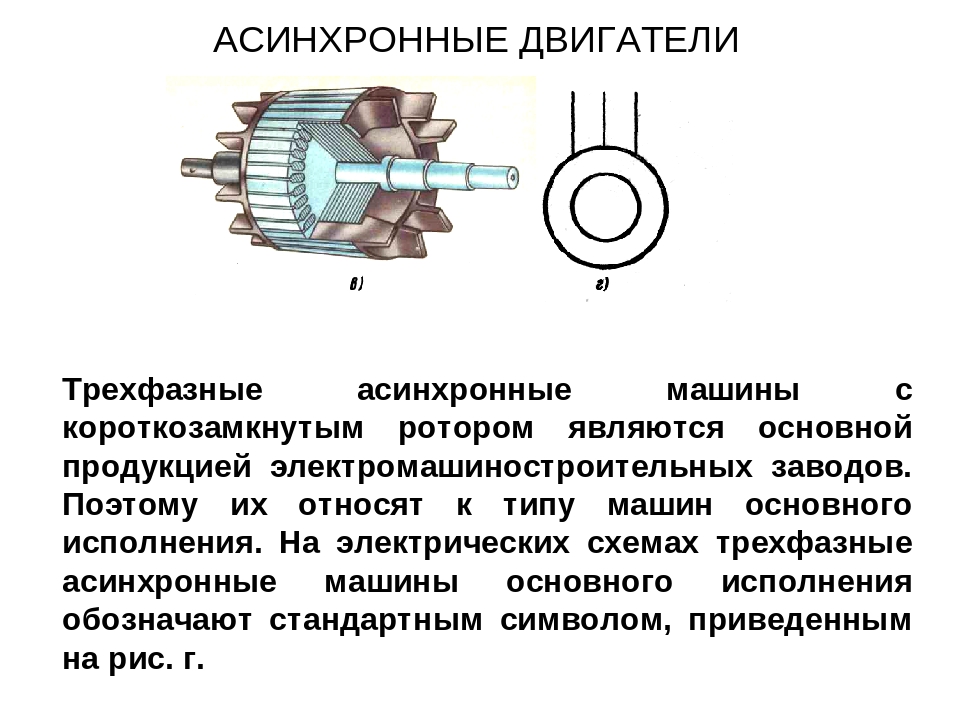 Иными словами, эти двигатели используются там, где есть необходимость запуска под нагрузкой, а не на холостом ходу.
Иными словами, эти двигатели используются там, где есть необходимость запуска под нагрузкой, а не на холостом ходу.
Проверка электродвигателя с фазным ротором
Для проверки обмоток статора трехфазного АД на целостность, необходимо добраться до клемм их подключения. Затем нужно произвести замеры сопротивлений между фазными клеммами по отдельности, предварительно сняв перемычки. Если сопротивление какой-либо обмотки меньше, чем у других, это свидетельствует о замыкании между ее витками. В этом случае двигатель отдается на перемотку.
Для проверки обмоток ротора, необходимо отыскать выводы от контактных колец. Затем нужно убедиться, что сопротивления обмоток совпадают. Если конструкция электродвигателя предусматривает наличие системы отключения обмоток ротора, отсутствие контакта может быть обусловлено именно поломкой данного механизма, а не обрывом витков.
О наличие какой-либо неисправности АД могут свидетельствовать следующие факторы:
- Снижение скорости вращения при нагрузке.
 Характерно для высокого сопротивления в цепи ротора, слабого контакта в его обмотке, низкого напряжения электросети
Характерно для высокого сопротивления в цепи ротора, слабого контакта в его обмотке, низкого напряжения электросети - Разворачивание АД, когда цепь ротора разомкнута – КЗ в обмотке ротора
- Чрезмерное равномерное повышение температуры двигателя – длительная перегрузка АД или его недостаточное охлаждение
- Нагрев статорной обмотки местного характера – двойное замыкание катушек статора на корпус или между фазами, КЗ между витками, неверное подключение катушек в фазе между собой
- Нагрев стали статора местного характера – нарушение изоляции между листами стали, их оплавление и выгорание, замыкание
- Посторонний шум при работе АД. Может быть вызван как выходом из строя подшипников, так и недостаточной запрессовкой активной стали. Определяется на слух по характеру постороннего шума
- Перегорание в обмотке якоря предохранителей, отсутствие контакта в подводящей проводке, выход из строя реостата
Для самостоятельной диагностики и исправления неисправностей электродвигателя необходимыми являются хотя-бы минимальные познания в устройстве АД и электрических цепях в целом. Все же крайне не рекомендуется самостоятельно заниматься ремонтом электродвигателя с фазным ротором, так как это может привести к поражению электрическим током.
Все же крайне не рекомендуется самостоятельно заниматься ремонтом электродвигателя с фазным ротором, так как это может привести к поражению электрическим током.
Асинхронный двигатель с короткозамкнутым ротором
Учитывая то, что электроснабжение традиционно осуществляется путём доставки потребителям переменного тока, понятно стремление к созданию электромашин, работающих на поставляемой электроэнергии. В частности, переменный ток активно используется в асинхронных электродвигателях, нашедших широкое применение во многих областях деятельности человека. Особого внимания заслуживает асинхронный двигатель с короткозамкнутым ротором, который в силу ряда причин занял прочные позиции в применении.
Секрет такой популярности состоит, прежде всего, в простоте конструкции и дешевизне его изготовления. У электромоторов на короткозамкнутых роторах есть и другие преимущества, о которых вы узнаете из данной статьи. А для начала рассмотрим конструктивные особенности этого типа электрических двигателей.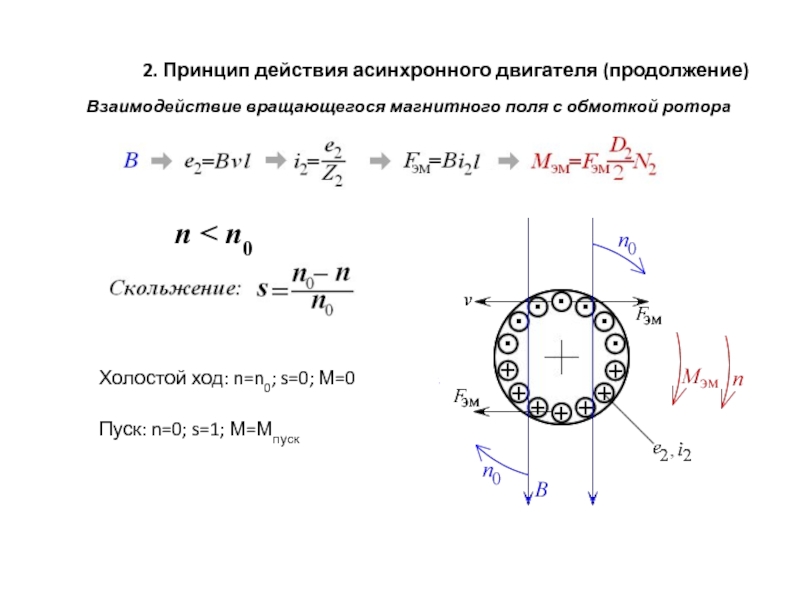
Конструкция
В каждом электромоторе есть две важных рабочих детали: ротор и статор. Они заключены в защитный кожух. Для охлаждения проводников обмотки на валу ротора установлен вентилятор. Это общий принцип строения всех типов электродвигателей.
Конструкции статоров рассматриваемых электродвигателей ничем не отличаются от строения этих деталей в других типах электромоторов, работающих в сетях переменного тока. Сердечники статора, предназначенного для работы при трехфазном напряжении, располагаются по кругу под углом 120º. На них устанавливаются обмотки из изолированной медной проволоки определённого сечения, которые соединяются треугольником или звездой. Конструкция магнитопровода статора жёстко крепится на стенках цилиндрического корпуса.
Строение электродвигателя понятно из рисунка 1. Обратите внимание на конструкцию обмоток без сердечника в короткозамкнутом роторе.
Рис. 1. Строение асинхронного двигателя с КЗ РоторомНемного по-другому устроен ротор. Конструкция его обмотки очень похожа на беличью клетку. Она состоит из алюминиевых стержней, концы которых замыкают короткозамыкающие кольца. В двигателях большой мощности в качестве короткозамкнутых обмоток ротора можно увидеть применение медных стержней. У этого металла низкое удельное сопротивление, но он дороже алюминия. К тому же медь быстрее плавится, а это не желательно, так как вихревые токи могут сильно нагревать сердечник.
Она состоит из алюминиевых стержней, концы которых замыкают короткозамыкающие кольца. В двигателях большой мощности в качестве короткозамкнутых обмоток ротора можно увидеть применение медных стержней. У этого металла низкое удельное сопротивление, но он дороже алюминия. К тому же медь быстрее плавится, а это не желательно, так как вихревые токи могут сильно нагревать сердечник.
Конструктивно стержни расположены поверх сердечников ротора, которые состоят из трансформаторной стали. При изготовлении роторов сердечники монтируют на валу, а проводники обмотки впрессовывают (заливают) в пазы магнитопровода. При этом нет необходимости в изоляции пазов сердечника. На рисунке 2 показано фото ротора с КЗ обмотками.
Рис. 2. Ротор асинхронного двигателя с КЗ обмоткамиПластины магнитопроводов таких роторов не требуют лаковой изоляции поверхностей. Они очень просты в изготовлении, что удешевляет себестоимость асинхронных электродвигателей, доля которых составляет до 90% от общего числа электромоторов.
Ротор асинхронно вращается внутри статора. Между этими деталями устанавливаются минимальные расстояния в виде воздушных зазоров. Оптимальный зазор находится в пределах от 0,5 мм до 2 мм.
В зависимости от количества используемых фаз асинхронные электродвигатели можно разделить на три типа:
Они отличаются количеством и расположением обмоток статора. Модели с трехфазными обмотками отличаются высокой стабильностью работы при номинальной нагрузке. У них лучшие пусковые характеристики. Зачастую такие электродвигатели используют простую схему пуска.
Двухфазные двигатели имеют две перпендикулярно расположенных обмотки статора, на каждую из которых поступает переменный ток. Их часто используют в однофазных сетях – одну обмотку подключают напрямую к фазе, а для питания второй применяют фазосдвигающий конденсатор. Без этой детали вращение вала асинхронного электродвигателя самостоятельно не начнётся. В связи с тем, что конденсатор является неотъемлемой частью двухфазного электромотора, такие двигатели ещё называют конденсаторными.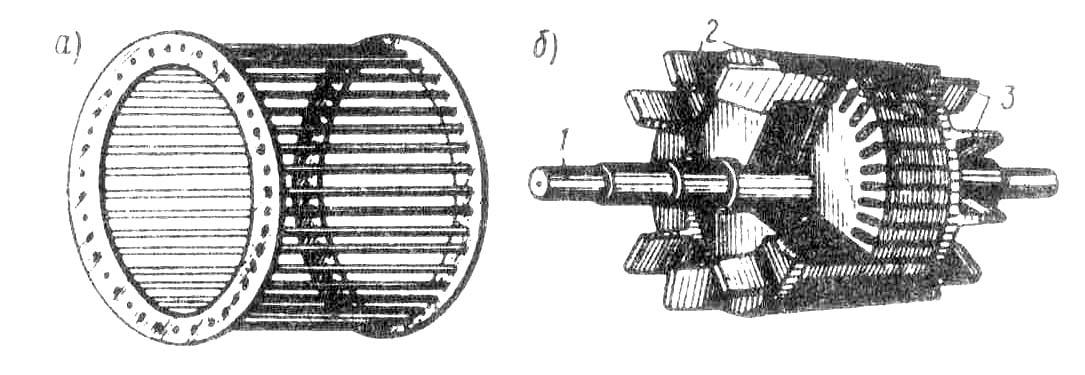
В конструкции однофазного электродвигателя используют только одну рабочую обмотку. Для запуска вращения ротора применяют пусковую катушку индуктивности, которую через конденсатор кратковременно подключают к сети, либо замыкают накоротко. Эти маломощные моторчики используются в качестве электрических приводов некоторых бытовых приборов.
Принцип работы
Функционирование асинхронного двигателя осуществляется на основе свойства трёхфазного тока, способного создавать в обмотках статора вращающее магнитное поле. В рассматриваемых электродвигателях синхронная частота вращения электромагнитного поля связана прямо пропорциональной зависимостью с собственной частотой переменного тока.
Существует обратно пропорциональная зависимость частоты вращения от количества пар полюсов в обмотках статора. Учитывая то, что сдвиг фаз составляет 60º, зависимость частоты вращения ротора (в об/мин.) можно выразить формулой:
В результате действия магнитной индукции на сердечник ротора, в нём возникнет ЭДС, которая, в свою очередь, вызывает появление электрического тока в замкнутом проводнике. Возникнет сила Ампера, под действием которой замкнутый контур начнёт вращение вдогонку за магнитным полем. В номинальном режиме работы частота вращения ротора немного отстаёт от скорости вращения создаваемого в статоре магнитного поля. При совпадении частот происходит прекращение магнитного потока, ток исчезает в обмотках ротора, вследствие чего прекращается действие силы. Как только скорость вращения вала отстанет, переменными токами магнитных полей, возобновляется действие амперовой силы.
Возникнет сила Ампера, под действием которой замкнутый контур начнёт вращение вдогонку за магнитным полем. В номинальном режиме работы частота вращения ротора немного отстаёт от скорости вращения создаваемого в статоре магнитного поля. При совпадении частот происходит прекращение магнитного потока, ток исчезает в обмотках ротора, вследствие чего прекращается действие силы. Как только скорость вращения вала отстанет, переменными токами магнитных полей, возобновляется действие амперовой силы.
Разницу частот вращения магнитных полей называют частотой скольжения: ns=n1–n2, а относительную величину s, характеризующую отставание, называют скольжением.
s = 100% * ( ns/ n1) = 100% * (n1 — n2) / n1 , где ns – частота скольжения; n1, n2 – частоты вращений статорных и роторных магнитных полей соответственно.
С целью уменьшения гармоник ЭДС и сглаживания пульсаций момента силы, стержни короткозамкнутых витков немного скашивают. Взгляните ещё раз на рис. 2 и обратите внимание на расположение стержней, выполняющих роль обмоток ротора, относительно оси вращения.
Взгляните ещё раз на рис. 2 и обратите внимание на расположение стержней, выполняющих роль обмоток ротора, относительно оси вращения.
Скольжение зависит от того, какую механическую нагрузку приложено к валу двигателя. В асинхронных электромоторах изменение параметров скольжения происходит в диапазоне от 0 до 1. Причём в режиме холостого хода набравший обороты ротор почти не испытывает активного сопротивления. S приближается к нулю.
Увеличение нагрузки способствует увеличению скольжения, которое может достигнуть единицы, в момент остановки двигателя из-за перегрузки. Такое состояние равносильно режиму короткого замыкания и может вывести устройство из строя.
Относительная величина отставания соответствующая номинальной нагрузке электрической машины называется номинальным скольжением. Для маломощных электромоторов и двигателей средней мощности этот показатель изменяется в небольших пределах – от 8% до 2%. При неподвижности ротора электродвигателя скольжение стремится к 0, а при работе на холостом ходу оно приближается к 100%.
Во время запуска электромотора его обмотки испытывают нагрузку, что приводит к резкому увеличению пусковых токов. При достижении номинальных мощностей электрические двигатели с короткозамкнутыми витками самостоятельно восстанавливают номинальную частоту ротора.
Обратите внимание на кривую крутящего момента скольжения, изображённую на рис. 3.
Рис. 3. Кривая крутящего момента скольженияПри увеличении крутящего момента коэффициент s изменяется от 1 до 0 (см. отрезок «моторная область»). Возрастает также скорость вращения вала. Если скорость вращения вала превысит номинальную частоту, то крутящий момент станет отрицательным, а двигатель перейдёт в режим генерации (отрезок «генерирующая область»). В таком режиме ротор будет испытывать магнитное сопротивление, что приведёт к торможению мотора. Колебательный процесс будет повторяться, пока не стабилизируется крутящий момент, а скольжение не приблизится к номинальному значению.
Преимущества и недостатки
Повсеместное использование асинхронных двигателей с короткозамкнутыми роторами обусловлено их неоспоримыми преимуществами:
- стабильностью работы на оптимальных нагрузках;
- высокой надёжностью в эксплуатации;
- низкие эксплуатационные затраты;
- долговечностью функционирования без обслуживания;
- сравнительно высокими показателями КПД;
- невысокой стоимостью, по сравнению с моделями на основе фазных роторов и с другими типами электромоторов.
Из недостатков можно отметить:
- высокие пусковые токи;
- чувствительность к перепадам напряжений;
- низкие коэффициенты скольжений;
- необходимость в применении устройств, таких как преобразователи частоты, пусковые реостаты и др., для улучшения характеристик электромотора;
- ЭД с короткозамкнутым ротором нуждаются в дополнительных коммутационных управляющих устройствах, в случаях, когда возникает необходимость регулировать скорость.
Электродвигатели данного типа имеют приличную механическую характеристику. Несмотря на недостатки, они лидируют по показателям их применения.
Основные технические характеристики
В зависимости от класса электродвигателя, его технические характеристики меняются. В рамках данной статьи не ставится задача приведения параметров всех существующих классов двигателей. Мы остановимся на описании основных технических характеристик для электромоторов классов 56 А2 – 80 В2.
В этом небольшом промежутке на линейке моделей эелектромоторов с короткозамкнутыми роторами можно отметить следующее:
Мощность составляет от 0,18 кВт (класс 56 А2) до 2,2 кВт (класс 80 В2).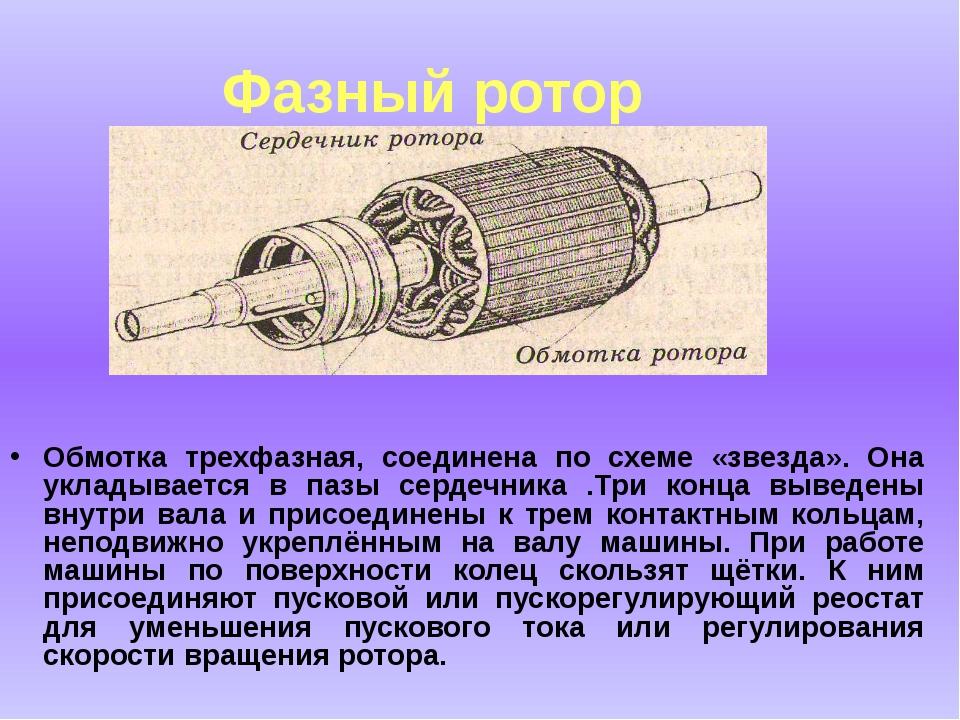
Ток при максимальном напряжении – от 0,55 А до 5А.
КПД от 66% до 83%.
Частота вращения вала для всех моделей из указанного промежутка составляет 3000 об./мин.
Технические характеристики конкретного двигателя указаны в его паспорте.
Подключение
Статорные обмотки трёхфазного АДКР можно подключать по схеме «треугольник» либо «звезда». При этом для звёздочки требуется напряжение выше, чем для треугольника.
Обратите внимание на то, что электродвигатель, подключенный разными способами к одной и той же сети, потребляет разную мощность. Поэтому нельзя подключать электромотор, рассчитанный на схему «звезда» по принципу треугольника. Но с целью уменьшения пусковых токов можно коммутировать на время пуска контакты звезды в треугольник, но тогда уменьшится и пусковой момент.
Схемы включения понятны из рисунка 4.
Рис. 4. Схемы подключенияДля подключения трёхфазного электрического двигателя к однофазному току применяют фазосдвигающие элементы: конденсаторы, резисторы. Примеры таких подключений смотрите на рисунке 5. Можно использовать как звезду, так и треугольник.
Примеры таких подключений смотрите на рисунке 5. Можно использовать как звезду, так и треугольник.
С целью управления работой двигателя в электрическую цепь статора подключаются дополнительные устройства.
Что такое асинхронный двигатель и принцип его действия
Данный двигатель зачастую используется в промышленности. Он простой в использовании, долговечный, недорогой.
Асинхронный двигатель превращает электрическую энергию в механическую. Его работа основана на принципе вращающегося магнитного поля. Сам принцип действия аппарата можно описать несколькими пунктами поэтапно:
- Во время запуска самого двигателя происходит пересечение магнитного поля с контуром ротора, после чего происходит индицирование электродвижущей силы.
- В замкнутом роторе происходит возникновение переменного тока.
- Магнитные поля: статора и ротора также воссоздают непосредственно так называемый крутящий момент.
- Ротор «догоняет» поле самого статора.

- Когда частоты вращения самого магнитного поля статора/ротора имеют совпадения, электромагнитные процессы, образованные в месте ротора затухают. После чего крутящий момент приравнивается к «0».
- Статор, а вернее его образованное магнитное поле возбуждает контур ротора, который в этот момент вновь позади.
Где применяются?
Как уже уточнялось выше в статье, применяется данный двигатель промышленности (лебедки общепромышленного назначения, краны) и бытовой технике (асинхронные двигатели с небольшой мощностью).
Теперь остановим ваше внимание на электродвигателе непосредственно с короткозамкнутым ротором. Они применяются в самих электроприводах различных типов станков, а если говорить точнее: металлообрабатывающих, а также часто встречающихся на сегодня грузоподъемных и ткацких, в том числе деревообрабатывающих), а также в вентиляторах, лифтах, различных насосах, бытовых приборах.
Если говорить об асинхронном электродвигателе с короткозамкнутым ротором, то благодаря его применению можно добиться существенного снижения энергопотребления оборудования, которое в свою очередь, обеспечивает высокий уровень надежности аппарата.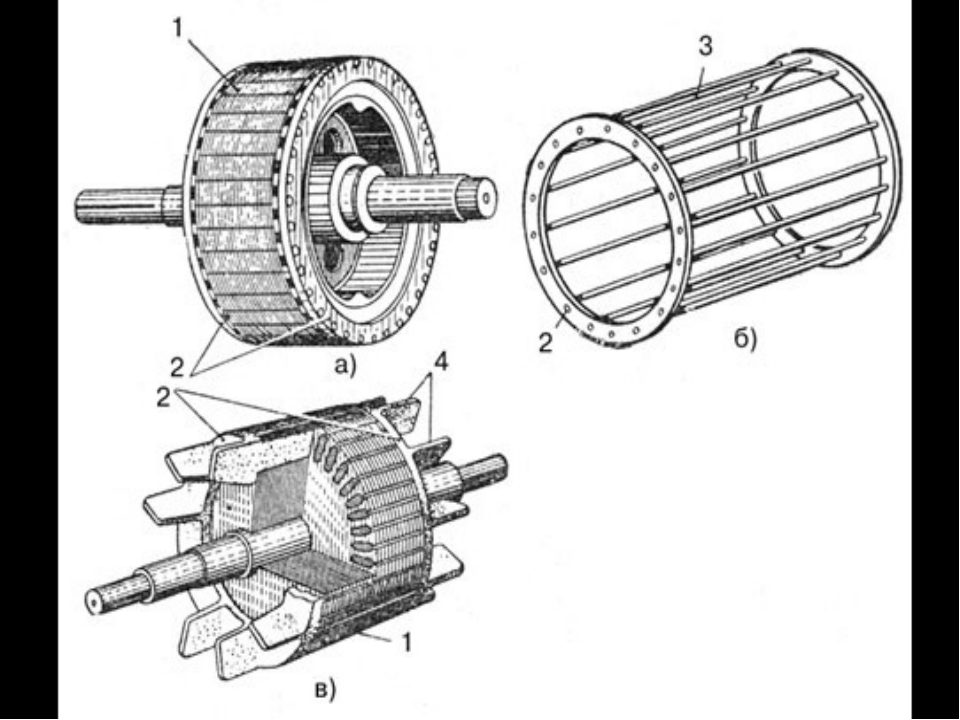 Данные характеристики оказывают положительный эффект на модернизацию производства в целом.
Данные характеристики оказывают положительный эффект на модернизацию производства в целом.
Что такое «скольжение»?
Пришло время поговорить о таком понятии как «скольжение» асинхронного двигателя.
Это, по сути, относительная разность скоростей самого вращения «ротора», это ни что иное, как изменение, так называемого переменного магнитного тока. «Скольжение» измеряется в относительных единицах, а также можно измерять в процентном соотношении.
Устройство асинхронного двигателя
Основные части двигателя: статор и ротор. Три обмотки находятся на полюсах железного сердечника кольцевой формы, сети так называемого трехфазного тока 0 располагаются одна относительно другой строго под углом 120 градусов.
Также отметим, что внутри самого сердечника закреплен на той же оси цилиндр из высококачественного металла. Он называется – ротор.
Статор
Статор это неподвижная часть, которая формирует вращающееся магнитное поле. Именно это поле непосредственно соприкасается с электромагнитным полем самой подвижной части, именуемой ротором, тем самым происходит полноценное вращение ротора.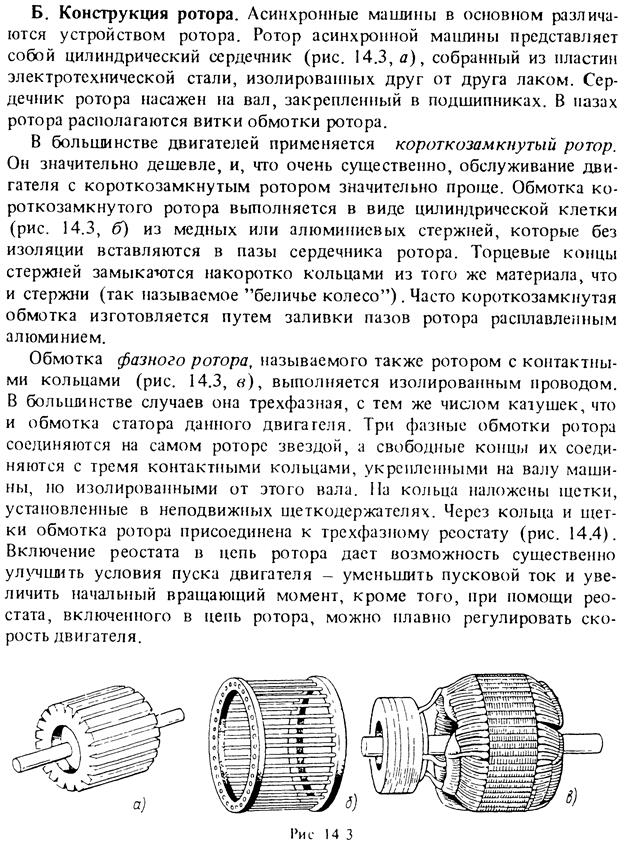
Двигатели статора имеют фазные и короткозамкнутые роторы.
Устройство статора
- Первое это корпус, изготовленный из чугуна, но часто встречаются корпуса из алюминия.
- Далее идет сердечник из пластин, которые изготовлены из электротехнической стали в толщину 0,5 миллиметров. Пластины сердечника скреплены скобками или же швами, покрыты изоляционным лаком, закреплены в станине при помощи стопорных болтов.
- Ну и последнее в устройстве статора– обмотки, сдвинутые друг к другу на 120 градусов, как правило, в устройстве их не более трех, они вложены в пазы на внутренней стороне самого сердечника, изготовлены из изолированного медного, алюминиевого провода круглого/квадратного сечения.
Сердечник статора
Выполняется с посадкой на вал, без наличия промежуточной втулки. Посадка сердечников используется в двигателях с высотой непосредственно оси в 250 миллиметров без шпонки.
В больших двигателях сердечники закреплены на вал с применением шпонки.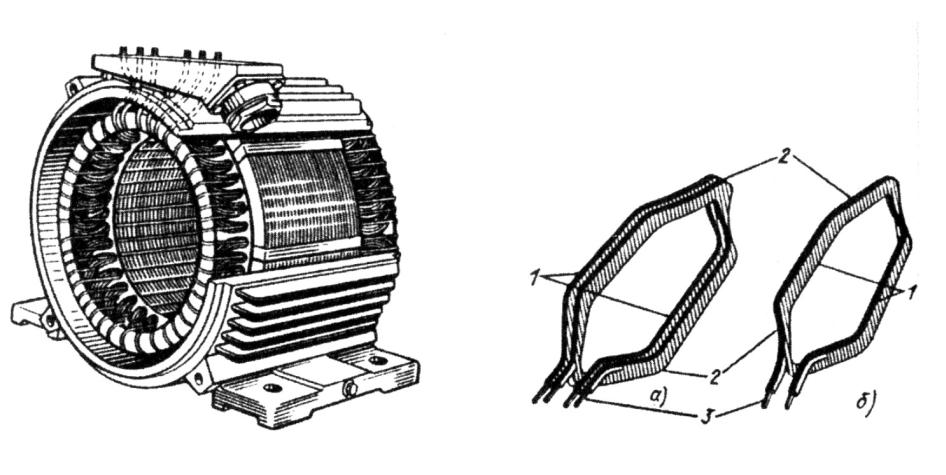 В случае, если ротор в диаметре 990 миллиметров, сердечник шихтуют из разных сегментов.
В случае, если ротор в диаметре 990 миллиметров, сердечник шихтуют из разных сегментов.
Обмотка статора и количество оборотов электродвигателя
Определить количество оборотов электродвигателя можно лишь при помощи обмотки. В этом нет ничего сложного и достаточно просто следовать инструкции и все получится. Для этого нужно:
- Снять крышку с двигателя.
- Найти одну из секций и посмотреть, сколько места она занимает по окружности самого круга. Например, если катушка заняла половину круга – это 180 градусов, то двигатель идет на 3000 оборотов в минуту.
- Если в окружности вмещается три секции на 120 градусов, то это двигатель на 1500 оборотов в минуту.
- Если в катушке вмещается 4 секции на 90 градусов, то двигатель на 3000 оборотов в минуту.
Ротор
Вращается внутри самого статора (выше описывали, что он представляет собой). Ротор – элемент электрического двигателя. Его вал соединен с деталями агрегаторов. Если говорить о массивном роторе – это цельный стальной цилиндр, который помещается во внутрь статора с не присоединенным к его поверхности сердечником (также выше описывали что такое сердечник).
Также бывают еще разновидности ротора:
- фазный (уложен в пазы сердечника обмоткой и соединен по схеме «звезда»),
- короткозамкнутый (залитый в поверхность сердечника, замкнут с торцов при помощи двух высокопроводящих медных колец).
Устройство короткозамкнутого ротора
Такая обмотка зачастую называется у профессионалов «беличьим колесом» по причине того, что его внешняя конструкция достаточно схожа с ним. Состоит из аллюминевых стержней, торцов с двумя кольцами замкнутых накоротко. Такие стержни вставлены, как правило, в пазы сердечника самого ротора.
Как сделан фазный ротор
Фазный ротор представляет собой двигатель, который поддается регулировке при помощи добавления в цепь ротора так называемых добавочных сопротивлений. Используются такого плана двигатели во время пуска с нагрузкой на валу. В свою очередь, увеличение сопротивления в цепи ротора предоставляет возможность увеличить пусковой момент.
Что лучше короткозамкнутый или фазный: совместная работа ротора и статора
Здесь стоит отметить, что особенных преимуществ нет ни у одного ротора, каждый хорош по-своему. Более подробно на них останавливаться не будем, так как вся необходимая информация по этим двум разновидностям ротора уже была дана выше в статье. остановим внимание на том, как регулируется частота вращения ротора. Это можно сделать при помощи изменения так называемого дополнительного сопротивления самой цепи ротора.
Более подробно на них останавливаться не будем, так как вся необходимая информация по этим двум разновидностям ротора уже была дана выше в статье. остановим внимание на том, как регулируется частота вращения ротора. Это можно сделать при помощи изменения так называемого дополнительного сопротивления самой цепи ротора.
Также можно регулировать частоту вращения ротора, изменив напряжение статора, который подведен к обмотке.
Можно также изменить частоту питающего напряжения или же переключить число пар полюсов, ввести резисторы в цепь ротора.
Классификация по типу ротора
Классификация по типу ротора следующая: однофазный асинхронный двигатель с короткозамкнутым ротором, а также есть такая разновидность ротора, как двухфазный асинхронный двигатель короткозамкнутый.
Плюс ко всему сегодня часто пользуется спросом и асинхронный двигатель с короткозамкнутым ротором с тремя фазами, а также асинхронный двигатель с фазным ротором, также с тремя фазами. Именно так и делится классификация ротора по числу фаз.
Линейные моторы
В линейных двигателях перемещение рабочего органа РО (коротких подач) происходит от самого двигателя через ременную передачу строго на винт (ходовой).
Шариковая гайка скреплена с короткой передачей пружинных механизмов защиты от соударений, именно через нее происходит вращение винта и происходит трансформация в продольное перемещение РО.
Подключение двигателя к питанию
Кнопки “Стоп” должны быть подключены в последовательности друг с другом, а в свою очередь кнопки “Пуск” должны строго настрого быть подключены в параллели между собой в цепи управления.
Во время нажатия на “Пуск” цепь катушки будет замкнута, а сама катушка начинает втягиваться, а во время размыкания кнопки, напряжение питающее катушку, пойдет через блок-контакт КМ. Прервать цепь управления можно при помощи нажатия на одну из кнопок “Стоп”.
Достоинства и недостатки асинхронных двигателей
Достоинства:
- прежде всего, их легко использовать и никаких сложностей при эксплуатации не возникает
- конструкция двигателей очень простая и это еще одно их преимущество, а также нельзя не отметить их низкую себестоимость (порой это имеет большое значение для покупателей, так что это еще один плюс таких двигателей)
- надежность
Недостатки:
- модели оснащены маленьким пусковым механизмом
- выдают высокой спусковой ток
- очень сильно чувствительны к возможной смене параметров в сети
- для плавного регулирования скорости нужен преобразователь вероятных частот
Несмотря на то, что есть свои недостатки эти асинхронные двигатели, пользуются огромной популярностью.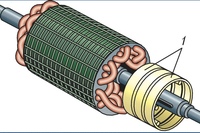 Так что все-таки они заслуживают должного уважения и не зря их часто используют в промышленности.
Так что все-таки они заслуживают должного уважения и не зря их часто используют в промышленности.
Устройство и принцип действия асинхронных электродвигателей
В промышленности наибольшее распространение получили асинхронные двигатели трехфазного тока. Рассмотрим устройство и принцип действия этих двигателей.
Принцип действия асинхронного двигателя основан на использовании вращающегося магнитного поля.
Для уяснения работы такого двигателя проделаем следующий опыт.
Укрепим подковообразный магнит на оси таким образом, чтобы его можно было вращать за ручку. Между полюсами магнита расположим на оси медный цилиндр, могущий свободно вращаться.
Рисунок 1. Простейшая модель для получения вращающегося магнитного поля
Начнем вращать магнит за ручку по часовой стрелке. Поле магнита также начнет вращаться и при вращении будет пересекать своими силовыми линиями медный цилиндр.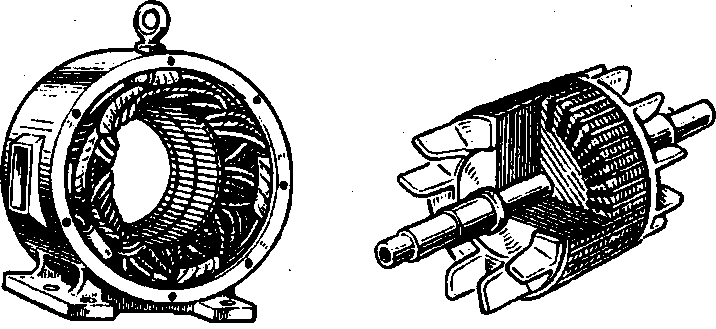 В цилиндре, по закону электромагнитной индукции, возникнут вихревые токи, которые создадут свое собственное магнитное поле — поле цилиндра. Это поле будет взаимодействовать с магнитным полем постоянного магнита, в результате чего цилиндр начнет вращаться в ту же сторону, что и магнит.
В цилиндре, по закону электромагнитной индукции, возникнут вихревые токи, которые создадут свое собственное магнитное поле — поле цилиндра. Это поле будет взаимодействовать с магнитным полем постоянного магнита, в результате чего цилиндр начнет вращаться в ту же сторону, что и магнит.
Установлено, что скорость вращения цилиндра несколько меньше скорости вращения поля магнита.
Действительно, если цилиндр вращается с той же скоростью, что и магнитное поле, то магнитные силовые линии не пересекают его, а следовательно, в нем не возникают вихревые токи, вызывающие вращение цилиндра.
Скорость вращения магнитного поля принято называть синхронной , так как она равна скорости вращения магнита, а скорость вращения цилиндра — асинхронной (несинхронной). Поэтому сам двигатель получил название асинхронного двигателя . Скорость вращения цилиндра (ротора) отличается от синхронной скорости вращения магнитного поля на небольшую величину, называемую скольжением.
Обозначив скорость вращения ротора через n1 и скорость вращения поля через n мы можем подсчитать величину скольжения в процентах по формуле:
В приведенном выше опыте вращающееся магнитное поле и вызванное им вращение цилиндра мы получали благодаря вращению постоянного магнита, поэтому такое устройство еще не является электродвигателем .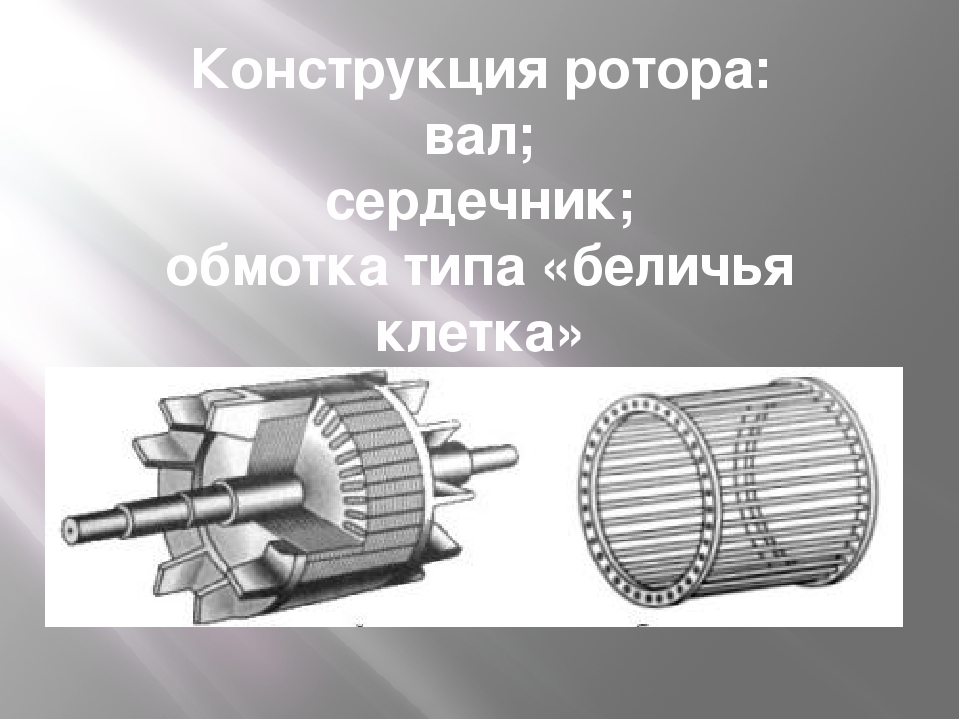 Надо заставить электрический ток создавать вращающееся магнитное поле и использовать его для вращения ротора. Задачу эту в свое время блестяще разрешил М. О. Доливо-Добровольский. Он предложил использовать для этой цели трехфазный ток.
Надо заставить электрический ток создавать вращающееся магнитное поле и использовать его для вращения ротора. Задачу эту в свое время блестяще разрешил М. О. Доливо-Добровольский. Он предложил использовать для этой цели трехфазный ток.
Устройство асинхронного электродвигателя М. О. Доливо-Добровольского
Рисунок 2. Схема асинхронного электродвигателя Доливо-Добровольского
На полюсах железного сердечника кольцевой формы, называемого статором электродвигателя , помещены три обмотки, сети трехфазного тока 0 расположенные одна относительно другой под углом 120°.
Внутри сердечника укреплен на оси металлический цилиндр, называемый ротором электродвигателя.
Если обмотки соединить между собой так, как показано на рисунке, и подключить их к сети трехфазного тока, то общий магнитный поток, создаваемый тремя полюсами, окажется вращающимся.
На рисунке 3 показан график изменения токов в обмотках двигателя и процесс возникновения вращающегося магнитного поля.
Рассмотрим — подробнее этот процесс.
Рисунок 3. Получение вращающегося магнитного поля
В положении «А» на графике ток в первой фазе равен нулю, во второй фазе он отрицателен, а в третьей положителен. Ток по катушкам полюсов потечет в направлении, указанном на рисунке стрелками.
Определив по правилу правой руки направление созданного током магнитного потока, мы убедимся, что на внутреннем конце полюса (обращенном к ротору) третьей катушки будет создан южный полюс (Ю), а на полюсе второй катушки — северный полюс (С). Суммарный магнитный поток будет направлен от полюса второй катушки через ротор к полюсу третьей катушки.
В положении «Б» на графике ток во второй фазе равен нулю, в первой фазе он положителен, а в третьей отрицателен. Ток, протекая по катушкам полюсов, создает на конце первой катушки южный полюс (Ю), на конце третьей катушки северный полюс (С). Суммарный магнитный поток теперь будет направлен от третьего полюса через ротор к первому полюсу, т. е. полюсы при этом переместятся на 120°.В положении «В» на графике ток в третьей фазе равен нулю, во второй фазе он положителен, а в первой отрицателен. Теперь ток, протекая по первой и второй катушкам, создаст на конце полюса первой катушки — северный полюс (С), а на конце полюса второй катушки — южный полюс (Ю), т. е. полярность суммарного магнитного поля переместится еще на 120°. В положении «Г» на графике магнитное поле переместится еще на 120°.
Теперь ток, протекая по первой и второй катушкам, создаст на конце полюса первой катушки — северный полюс (С), а на конце полюса второй катушки — южный полюс (Ю), т. е. полярность суммарного магнитного поля переместится еще на 120°. В положении «Г» на графике магнитное поле переместится еще на 120°.
Таким образом, суммарный магнитный поток будет менять свое направление с изменением направления тока в обмотках статора (полюсов).
При этом за один период изменения тока в обмотках магнитный поток сделает полный оборот. Вращающийся магнитный поток будет увлекать за собой цилиндр, и мы получим таким образом асинхронный электродвигатель.
Напомним, что на рисунке 3 обмотки статора соединены «звездой», однако вращающееся магнитное поле образуется и при соединении их «треугольником».
Если мы поменяем местами обмотки второй и третьей фаз, то магнитный поток изменит направление своего вращения на обратное.
Такого же результата можно добиться, не меняя местами обмотки статора, а направляя ток второй фазы сети в третью фазу статора, а третью фазу сети — во вторую фазу статора.
Таким образом, изменить направление вращения магнитного поля можно переключением двух любых фаз.
Мы рассмотрели устройство асинхронного двигателя, имеющего на статоре три обмотки . В этом случае вращающееся магнитное поле двухполюсное и число его оборотов в одну секунду равно числу периодов изменения тока в одну секунду.
Если на статоре разместить по окружности шесть обмоток, то будет создано четырехполюсное вращающееся магнитное поле . При девяти обмотках поле будет шестиполюсным.При частоте трехфазного тока f , равной 50 периодам в секунду, или 3000 в минуту, число оборотов n вращающегося поля в минуту будет:
при двухполюсном статоре n = (50 х 60 ) / 1 = 3000 об/мин,
при четырехполюсном статоре n = (50 х 60 ) / 2 = 1500 об/мин,
при шестиполюсном статоре n = (50 х 60 ) / 3 = 1000 об/мин,
при числе пар полюсов статора, равном p : n = (f х 60 ) / p ,
Итак, мы установили скорость вращения магнитного поля и зависимость ее от числа обмоток на статоре двигателя.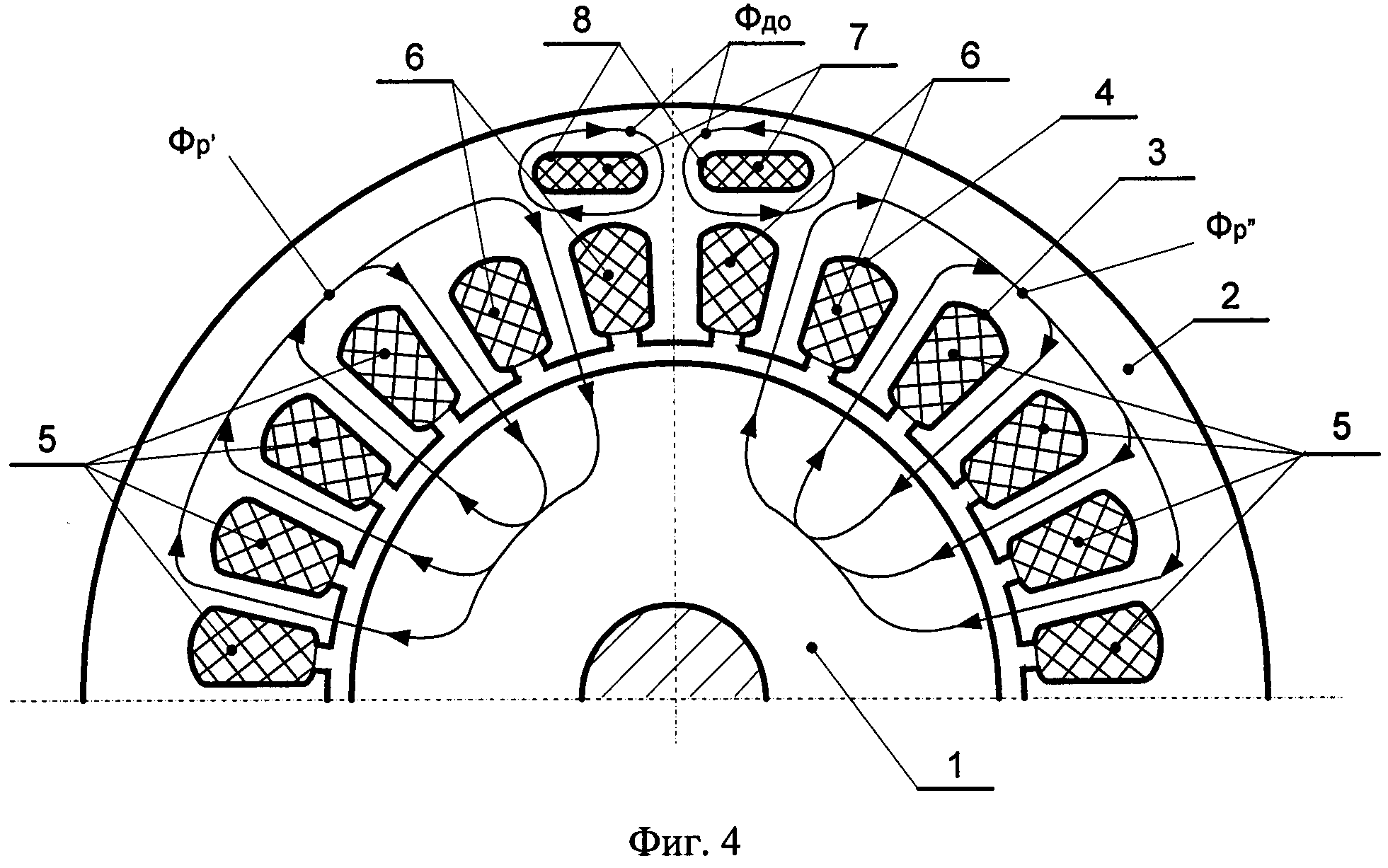
Ротор же двигателя будет, как нам известно, несколько отставать в своем вращении.
Однако отставание ротора очень небольшое. Так, например, при холостом ходе двигателя разность скоростей составляет всего 3%, а при нагрузке 5 — 7%. Следовательно, обороты асинхронного двигателя при изменении нагрузки изменяются в очень небольших пределах, что является одним из его достоинств.
Рассмотрим теперь устройство асинхронных электродвигателей
Статор современного асинхронного электродвигателя имеет невыраженные полюсы, т. е. внутренняя поверхность статора сделана совершенно гладкой.
Чтобы уменьшить потери на вихревые токи, сердечник статора набирают из тонких штампованных стальных листов.
Собранный сердечник статора закрепляют в стальном корпусе.В пазы статора закладывают обмотку из медной проволоки. Фазовые обмотки статора электродвигателя соединяются «звездой» или «треугольником», для чего все начала и концы обмоток выводятся на корпус — на специальный изоляционный щиток.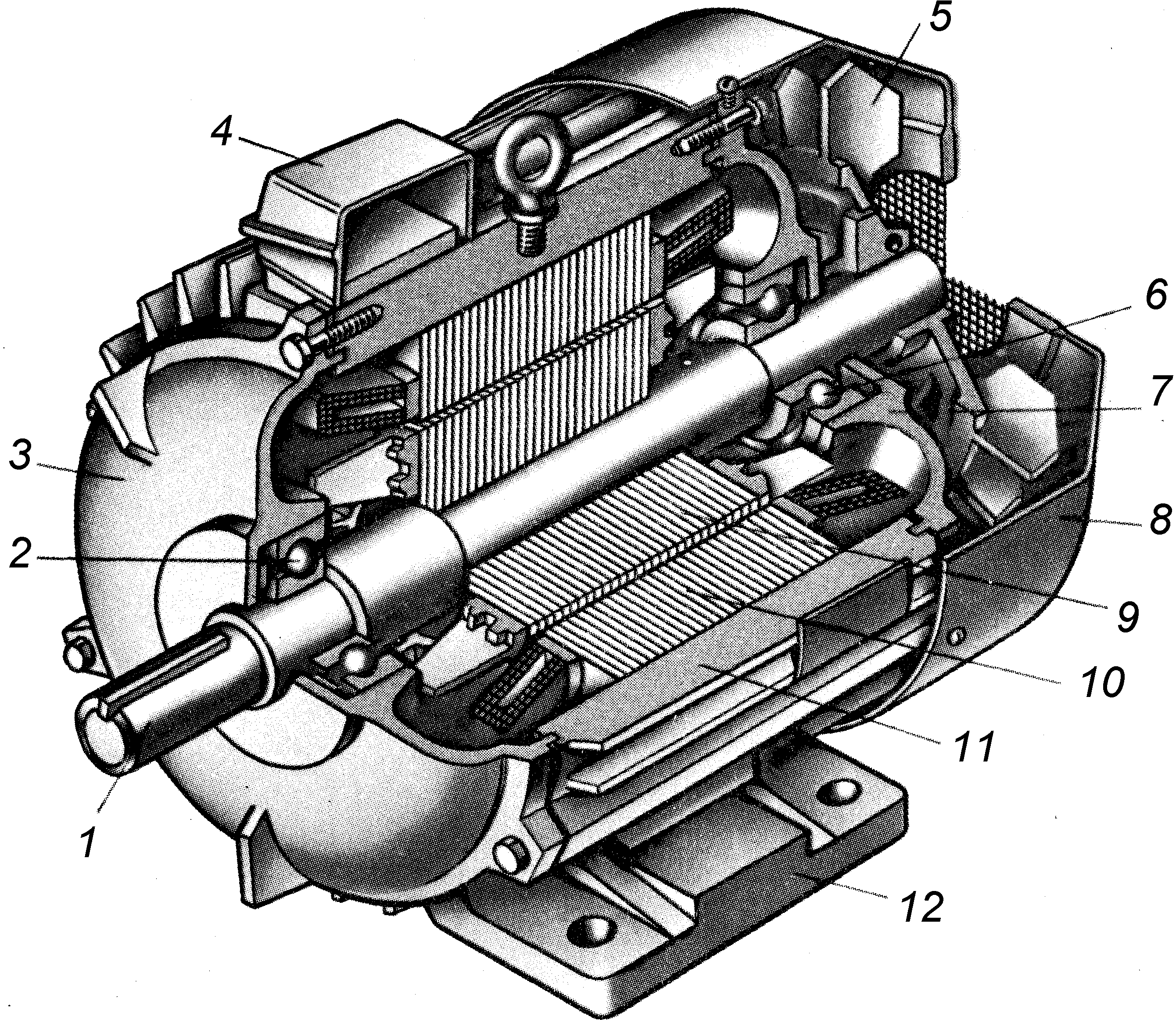 Такое устройство статора очень удобно, так как позволяет включать его обмотки на разные стандартные напряжения.
Такое устройство статора очень удобно, так как позволяет включать его обмотки на разные стандартные напряжения.
Ротор асинхронного двигателя , подобно статору, набирается из штампованных листов стали. В пазы ротора закладывается обмотка.
В зависимости от конструкции ротора асинхронные электродвигатели делятся на двигатели с короткозамкнутым ротором и фазным ротором .
Обмотка короткозамкнутого ротора сделана из медных стержней, закладываемых в пазы ротора. Торцы стержней соединены при помощи медного кольца. Такая обмотка называется обмоткой типа «беличьей клетки». Заметим, что медные стержни в пазах не изолируются.
В некоторых двигателях «беличью клетку» заменяют литым ротором.
Асинхронный двигатель с фазным ротором (с контактными кольцами) применяется обычно в электродвигателях большой мощности и в тех случаях; когда необходимо, чтобы электродвигатель создавал большое усилие при трогании с места. Достигается это тем, что в обмотки фазного двигателя включается пусковой реостат.
Короткозамкнутые асинхронные двигатели пускаются в ход двумя способами:
1) Непосредственным подключением трехфазного напряжения сети к статору двигателя. Этот способ самый простой и наиболее популярный.
2) Снижением напряжения, подводимого к обмоткам статора. Напряжение снижают, например, переключая обмотки статора со «звезды» на «треугольник».
Пуск двигателя в ход происходит при соединении обмоток статора «звездой», а когда ротор достигнет нормального числа оборотов, обмотки статора переключаются на соединение «треугольником».
Ток в подводящих проводах при этом способе пуска двигателя уменьшается в 3 раза по сравнению с тем током, который возник бы при пуске двигателя прямым включением в сеть с обмотками статора, соединенными «треугольником». Однако этот способ пригоден лишь в том случае, если статор рассчитан для нормальной работы при соединении его обмоток «треугольником».
Наиболее простым, дешевым и надежным является асинхронный электродвигатель с короткозамкнутым ротором , но этот двигатель обладает некоторыми недостатками — малым усилием при трогании с места и большим пусковым током. Эти недостатки в значительной мере устраняются применением фазного ротора, но применение такого ротора значительно удорожает двигатель и требует пускового реостата.
Типы асинхронных электродвигателей
Основной тип асинхронных машин — трехфазный асинхронный двигатель . Он имеет три обмотки на статоре, смещенные в пространстве на 120°. Обмотки соединяются в звезду или треугольник и питаются трехфазным переменным током.
Двигатели малой мощности в большинстве случаев выполняются как двухфазные . В отличие от трехфазных двигателей они имеют на статоре две обмотки, токи в которых для создания вращающегося магнитного поля должны быть сдвинуты на угол π /2.
Если токи в обмотках равны по модулю и сдвинуты по фазе на 90°, то работа подобного двигателя ничем не будет отличаться от работы трехфазного. Однако такие двигатели с двумя обмотками на статоре в большинстве случаев питаются от однофазной сети и сдвиг, приближающийся к 90°, создается искусственным путем, обычно за счет конденсаторов.
Однофазный двигатель , имеющий только одну обмотку на статоре, практически неработоспособен. При неподвижном роторе в двигателе создается только пульсирующее магнитное поле и вращающий момент равен нулю. Правда, если ротор такой машины раскрутить до некоторой скорости, то далее она может выполнять функции двигателя.
В этом случае, хотя и будет только пульсирующее поле, но оно слагается из двух симметричных — прямого и обратного, которые создают неравные моменты — больший двигательный и меньший тормозной, возникающий за счет токов ротора повышенной частоты (скольжение относительно обратносинхронного поля больше 1).
В связи с изложенным однофазные двигатели снабжаются второй обмоткой, которая используется как пусковая. В цепь этой обмотки для создания фазового сдвига тока включают конденсаторы, емкость которых может быть достаточно велика (десятки микрофарад при мощности двигателя менее 1 кВт).
В системах управления используются двухфазные двигатели, которые иногда называют исполнительными . Они имеют две обмотки на статоре, сдвинутые в пространстве на 90°. Одна из обмоток, называемая обмоткой возбуждения, непосредственно подключается к сети 50 или 400 Гц. Вторая используется как обмотка управления.
Они имеют две обмотки на статоре, сдвинутые в пространстве на 90°. Одна из обмоток, называемая обмоткой возбуждения, непосредственно подключается к сети 50 или 400 Гц. Вторая используется как обмотка управления.
Для создания вращающегося магнитного поля и соответствующего момента ток в обмотке управления должен быть сдвинут на угол, близкий к 90°. Регулирование скорости двигателя, как будет показано ниже, осуществляется изменением значения или фазы тока в этой обмотке. Реверс обеспечивается изменением фазы тока в управляющей обмотке на 180° (переключением обмотки).
Двухфазные двигатели изготовляются в нескольких исполнениях:
с короткозамкнутым ротором,
с полым немагнитным ротором,
с полым магнитным ротором.
Преобразование вращательного движения двигателя в поступательное движение органов рабочей машины всегда связано с необходимостью использования каких-либо механических узлов: зубчатых реек, винта и др. Поэтому иногда целесообразно выполнение двигателя с линейным перемещением ротора-бегунка (название ’’ротор” при этом может быть принято только условно — как движущегося органа).
В этом случае двигатель, как говорят, может быть развернут. Обмотка статора линейного двигателя выполняется так же, как и у объемного двигателя, но только должна быть заложена в пазы на всю длину максимального возможного перемещения ротора-бегунка. Ротор-бегунок обычно короткозамкнутый, с ним сочленяется рабочий орган механизма. На концах статора, естественно, должны находиться ограничители, препятствующие уходу ротора за рабочие пределы пути.
Различные неисправности трехфазных асинхронных двигателей | Эксплуатация электрических машин и аппаратуры | Архивы
Страница 50 из 74
Повреждение одного или нескольких стержней беличьей клетки короткозамкнутого ротора.
В настоящее время указанная неисправность встречается относительно часто в роторах, залитых алюминием под давлением.
При работе двигателя с поврежденными роторными стержнями скорость вращения ротора с одинаковой нагрузкой будет меньше, чем в таком же двигателе с исправным ротором.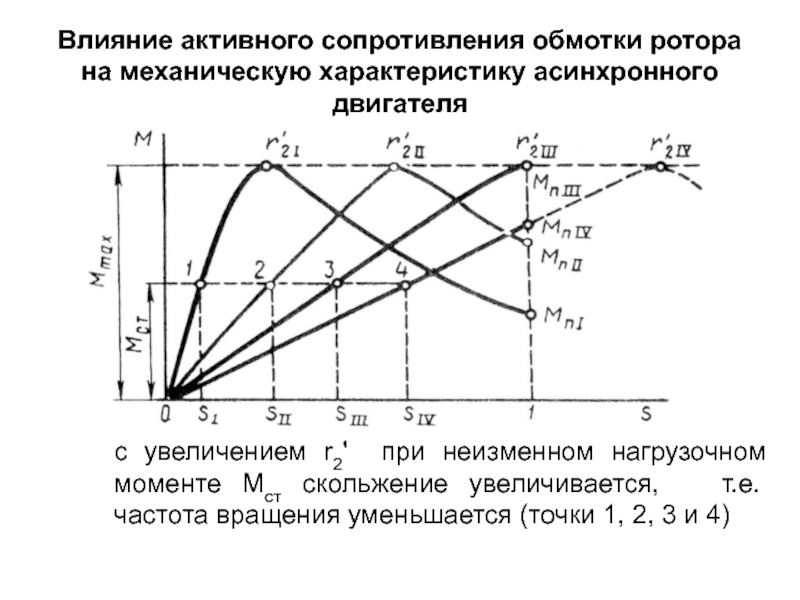 В отдельных случаях двигатель с поврежденными стержнями ротора может вообще не развернуться до рабочей скорости вращения ротора даже при малой нагрузке. При значительном количестве поврежденных стержней ротор загруженного двигателя останавливается, двигатель терпит аварию, если он не отключается от сети действием защиты. Во всех случаях двигатель с поврежденными роторными стержнями, работающий под нагрузкой, потребляет из сети повышенный ток и перегревается больше исправного двигателя.
В отдельных случаях двигатель с поврежденными стержнями ротора может вообще не развернуться до рабочей скорости вращения ротора даже при малой нагрузке. При значительном количестве поврежденных стержней ротор загруженного двигателя останавливается, двигатель терпит аварию, если он не отключается от сети действием защиты. Во всех случаях двигатель с поврежденными роторными стержнями, работающий под нагрузкой, потребляет из сети повышенный ток и перегревается больше исправного двигателя.
Иногда наблюдается выход из строя роторных стержней, сделанных из латуни или меди. Такие явления чаще всего бывают при внезапном заклинивании приводного механизма или при пуске двигателя, приводящего во вращение неисправные механизмы с большими маховиками.
Если при эксплуатации двигателя появятся признаки неисправности беличьей клетки ротора, необходимо двигатель разобрать и проверить роторные стержни. Рекомендуется проверять целость стержней при профилактических ремонтах двигателя.
Рис. 112. Проверка целости стержней короткозамкнутого ротора:1 — электромагнит переменного тока; 2 — проверяемый ротор; 3 — лист электрокартона со стальными опилками.
112. Проверка целости стержней короткозамкнутого ротора:1 — электромагнит переменного тока; 2 — проверяемый ротор; 3 — лист электрокартона со стальными опилками.
Проверять исправность беличьей клетки ротора лучше всего электромагнитом переменного тока и листом электрокартона с чугунными или стальными опилками.
Ротор ставят в раздвижной электромагнит, как показано на рисунке 112.
В обмотку электромагнита включают ток, переменным магнитным потоком наводится э. д. с. во всех роторных стержнях, ток протекает только по целым стержням. На поверхность ротора накладывают лист электрокартона со стальными опилками.
Вдоль целых роторных стержней опилки рассыпаются, на них действует магнитное поле стержней с током. Если стержни поврежденные, опилки не рассыпаются.
Обрыв одной фазы ротора двигателя с контактными кольцами.
При обрыве одной фазы в роторной цепи двигателей с контактными кольцами возникает так называемый эффект Гёргеса — при работе двигателя скорость ротора снижается примерно в два раза, статорный ток резко возрастает до опасных пределов; при пуске двигателя скорость ротора не превышает половины номинальной. Статорный ток большой.
Этот эффект возникает независимо от того, где произошел обрыв: в обмотке ротора, в щеточном аппарате или в реостате. Для выявления неисправности необходимо отсоединить реостат от роторной цепи и поочередно проверить целость цепей ротора, щеточного аппарата и реостата контрольной лампой. Сначала надо проверить целость обмотки ротора, касаясь концами контрольной лампы поочередно первого и второго, второго и третьего, первого и третьего колец.
Рис. 113. Проверка целости обмотки фазового ротора:
1 — ротор; 2 — контактные кольца.
Так же проверяют надежность контактов щеток с кольцами и целость проводников, соединяющих щетки с клеммником ротора, и реостат. Каждая из трех проверок должна быть сделана при всех положениях переключателя реостата. Если проверяемая цепь исправна, лампа горит Схема проверки целости обмотки показана на рисунке 113.
Обрыв одной фазы сети, питающей статор.
Если обрыв произошел во время работы двигателя и нагрузка его не превышает половины номинальной, двигатель продолжает работать с несколько большим потреблением энергии из сети, скорость его понижается незначительно.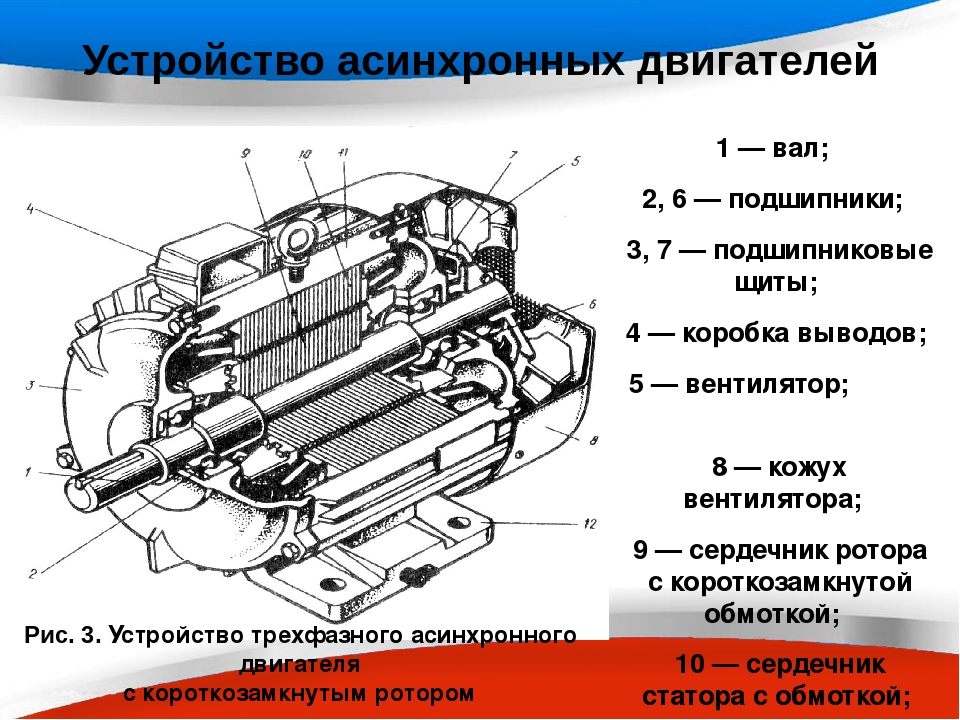 При больших нагрузках двигатель останавливается, обмотка выходит из строя, если нет надлежащей защиты. Двигатель после остановки не может быть запущен даже на холостом ходу, так как вместо вращающегося магнитного поля при трех фазах есть пульсирующее магнитное поле. Обрыв одной из фаз питающей сети чаще всего бывает вследствие перегорания одной из плавких вставок, защищающих двигатель. При подозрении на обрыв одной из фаз сети следует двигатель остановить и пустить его вновь на холостом ходу. Если фаза оборвана, двигатель гудит и не разворачивается.
При больших нагрузках двигатель останавливается, обмотка выходит из строя, если нет надлежащей защиты. Двигатель после остановки не может быть запущен даже на холостом ходу, так как вместо вращающегося магнитного поля при трех фазах есть пульсирующее магнитное поле. Обрыв одной из фаз питающей сети чаще всего бывает вследствие перегорания одной из плавких вставок, защищающих двигатель. При подозрении на обрыв одной из фаз сети следует двигатель остановить и пустить его вновь на холостом ходу. Если фаза оборвана, двигатель гудит и не разворачивается.
Найти отсутствующую фазу легче токоизмерительными клещами. Для определения такой фазы достаточно двигатель включить на короткое время и быстро измерить ток во всех фазах. В оборванной фазе тока не будет.
Отсутствующие фазы можно проверить и контрольной лампой. Для этого питающие провода отсоединяют от двигателя и ставят под напряжение, трижды подключают один из концов лампы поочередно к каждому проводу, а другой — к корпусу двигателя. На поврежденном проводе лампа гореть не будет. Если трансформатор, питающий данную электроустановку, с изолированной нейтралью, лампу следует включить между линейными проводами первым и вторым, вторым и третьим, первым и третьим. Лампа будет гореть из трех включений только один раз на целых проводах.
На поврежденном проводе лампа гореть не будет. Если трансформатор, питающий данную электроустановку, с изолированной нейтралью, лампу следует включить между линейными проводами первым и вторым, вторым и третьим, первым и третьим. Лампа будет гореть из трех включений только один раз на целых проводах.
При проверках напряжение лампы должно соответствовать
Рис. 114. Работа асинхронного электродвигателя по схеме открытого треугольника. Показания амперметра А2 в 1,73 раза больше показаний амперметров А1 и А3.
напряжению сети: в первом случае фазному, во втором линейному.
Внутренний обрыв одной фазы обмотки статора.
При соединении обмотки звездой внутренний обрыв одной фазы дает такие же результаты, как при обрыве одной фазы питающей сети. Соединяя обмотку статора треугольником, внутренний обрыв одной фазы трудно заметить сразу. В этом случае обмотки двух целых фаз двигателя окажутся подключенными к сети по схеме открытого треугольника, как показано на рисунке 114.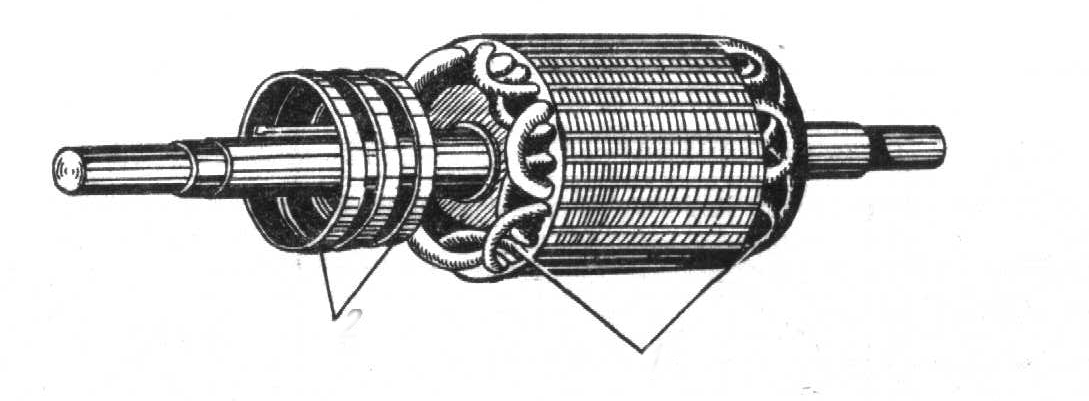 Током, протекающим по обмотке статора, создается вращающееся магнитное поле, и двигатель хорошо берет с места, развивает нормальную скорость. Во время работы под нагрузкой двигатель потребляет из сети повышенный ток: две фазы статора, оставшиеся в работе, перегреваются. Двигатель потребляет из сети больше энергии, чем в нормальном режиме, и в отдельных случаях может развить момент, близкий к номинальному при сильном перегреве двух работающих фаз. Нередко обмотка двигателя полностью выходит из строя при работе двигателя по схеме открытого треугольника. Указанную неисправность можно определить, измерив линейный ток в фазах работающего двигателя. Ток в одной из фаз при открытом треугольнике примерно в 1,7 раза больше тока двух других фаз.
Током, протекающим по обмотке статора, создается вращающееся магнитное поле, и двигатель хорошо берет с места, развивает нормальную скорость. Во время работы под нагрузкой двигатель потребляет из сети повышенный ток: две фазы статора, оставшиеся в работе, перегреваются. Двигатель потребляет из сети больше энергии, чем в нормальном режиме, и в отдельных случаях может развить момент, близкий к номинальному при сильном перегреве двух работающих фаз. Нередко обмотка двигателя полностью выходит из строя при работе двигателя по схеме открытого треугольника. Указанную неисправность можно определить, измерив линейный ток в фазах работающего двигателя. Ток в одной из фаз при открытом треугольнике примерно в 1,7 раза больше тока двух других фаз.
Витковое замыкание в обмотке статора.
При таком замыкании двигатель сильно гудит, величина тока во всех фазах неодинакова, если двигатель под нагрузкой, ротор вращается с пониженной скоростью. Через некоторое время после возникновения виткового замыкания двигатель дымит, появляется характерный запах горящей изоляции.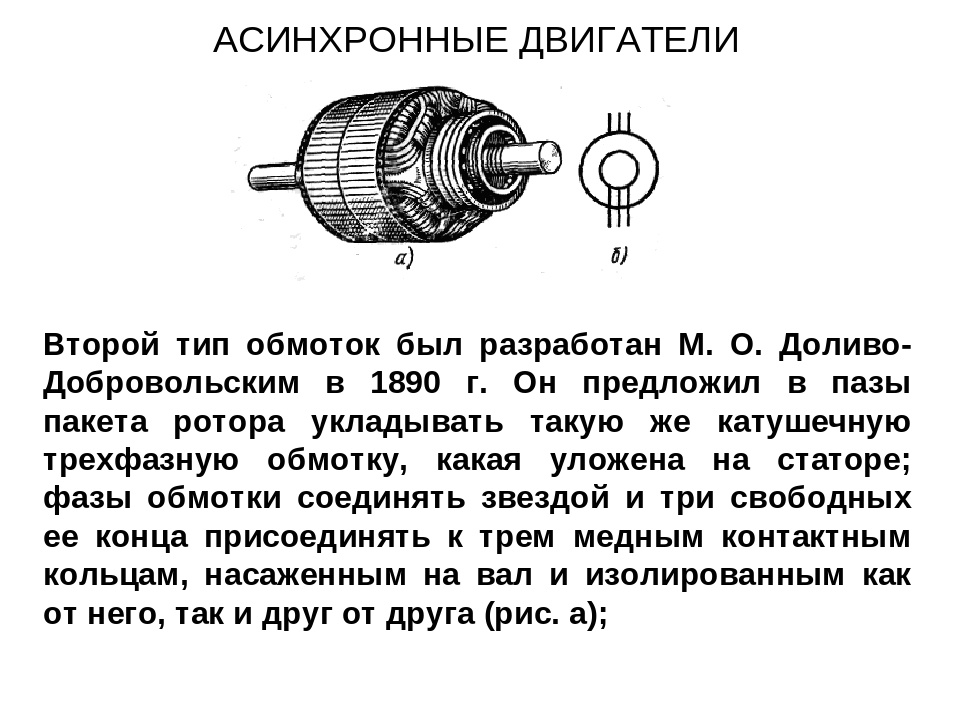
Витковое и междуфазное замыкание в обмотке ротора двигателя с контактными кольцами.
При таком замыкании обмотка ротора перегревается, ток в фазах статора колеблется, обмотка статора нагревается больше обычного, при пуске и работе с сопротивлением роторной цепи обмотка ротора дымит.
Если замкнутых витков много, ротор без нагрузки разворачивается даже при разомкнутых кольцах, а под нагрузкой двигатель долго разворачивается и сильно нагревается.
При междуфазном замыкании в обмотке ротора двигатель разворачивается при разомкнутых кольцах чаще всего до половинной скорости, а по обмотке статора протекает колеблющийся ток, который может быть больше номинального значения.
Неисправности щеточного аппарата в двигателях с контактными кольцами.
Эти неисправности внешне в конечном счете приводят к искрению щеток, иногда происходит пробой изоляции между кольцами в процессе пуска двигателя, так как напряжение между кольцами в этот момент имеет максимальное значение.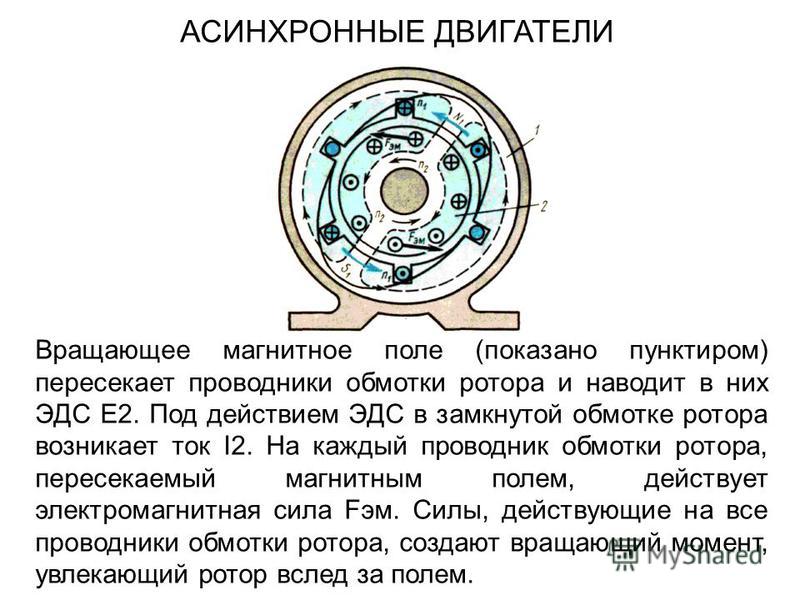
При эксплуатации щетки искрят чаще из-за ослабления щеточных пружин. Усилие, с которым пружина прижимает щетку к кольцу, можно определить динамометром. Ориентировочная величина усилия в килограммах должна соответствовать подсчитанной по формуле:
F = 0,255 [кГ],
где 0,25 — удельное давление на меднографитную щетку, кГ/см2;
S — площадь щетки, см2.
Повышенное давление на щетку также вызывает искрение, щетки перегреваются от повышенного трения. При замене сносившихся щеток новыми следует поставить щетки той же марки, в противном случае может появиться искрение. Новые щетки должны свободно двигаться в обойме щеткодержателя. Перед пуском двигателя щетки надо пришлифовать к кольцам.
Контактные кольца должны быть цилиндрическими, без биения. При биении колец щетки перемещаются в обоймах щеткодержателей, если биения нет, щетки неподвижны. Искрение щеток может
быть из-за слабого крепления колеи, из-за неровной контактной поверхности колец.
В процессе работы двигателя щеточный аппарат загрязняется меднографитовой пылью, а иногда и смазкой от ближайшего подшипника. Все это обусловит появление искрения и перекрытия щеточного аппарата дугой.
Отклонение напряжения питающей сети от номинального значения.
Напряжение сельских электрических сетей колеблется в значительных пределах, официально узаконено отклонение напряжения на ±7,5% от номинального. Однако эти отклонения бывают значительно больше. При повышенном напряжении сети активная сталь машины равномерно перегревается даже при отсутствии нагрузки, двигатель потребляет из сети повышенный намагничивающий ток. При значительных повышениях напряжения изоляция обмотки статора разрушается вследствие перегрева ее от высокой температуры активной стали и большой величины намагничивающего тока. Эксплуатировать электродвигатели при повышенных напряжениях не рекомендуется.
При пониженном напряжении сети активная сталь машины не перегревается, а обмотки перегреваются, так как двигатель потребляет повышенный ток при поминальной нагрузке. В случае понижения напряжения необходимо уменьшить нагрузку на двигатель, чтобы он потреблял из сети номинальный ток. При значительных уменьшениях напряжения затрудняется пуск двигателя — резко уменьшается его пусковой момент. При длительных понижениях напряжения сети его следует повысить перестановкой анцапф силового трансформатора. Понижение напряжения возможно также из-за недостаточного сечения линии электропередачи. В этом случае повысить напряжение можно, увеличив сечение линии или заменив марки проводов (например, вместо алюминиевых медные такого же сечения). При замене сечения или марки проводов следует учитывать механическую прочность опор линии электропередач, если новые провода тяжелее старых.
В случае понижения напряжения необходимо уменьшить нагрузку на двигатель, чтобы он потреблял из сети номинальный ток. При значительных уменьшениях напряжения затрудняется пуск двигателя — резко уменьшается его пусковой момент. При длительных понижениях напряжения сети его следует повысить перестановкой анцапф силового трансформатора. Понижение напряжения возможно также из-за недостаточного сечения линии электропередачи. В этом случае повысить напряжение можно, увеличив сечение линии или заменив марки проводов (например, вместо алюминиевых медные такого же сечения). При замене сечения или марки проводов следует учитывать механическую прочность опор линии электропередач, если новые провода тяжелее старых.
Неравномерный воздушный зазор между активной сталью ротора и статора.
Это может возникнуть вследствие износа замков подшипниковых щитов, слабой посадки подшипников в щиты, прогиба вала и т. д. При неравномерном воздушном зазоре активная сталь вращающегося ротора задевает за активную сталь статора, что вызывает межлистовые замыкания стали. В отдельных случаях обмотки двигателя выходят из строя, так как зубья активной стали статора могут сдвинуться, из-за чего возникнет витковое, или междуфазное, замыкание в обмотке статора. При неравномерном воздушном зазоре некоторые двигатели запускают из какого-нибудь одного определенного положения ротора.
В отдельных случаях обмотки двигателя выходят из строя, так как зубья активной стали статора могут сдвинуться, из-за чего возникнет витковое, или междуфазное, замыкание в обмотке статора. При неравномерном воздушном зазоре некоторые двигатели запускают из какого-нибудь одного определенного положения ротора.
Местные перегревы активной стали статора.
В отдельных случаях эта активная сталь неравномерно нагревается, что вредно отражается на изоляции обмотки. Отдельные места активной стали нагреваются из-за отсутствия изоляции между листами.
Межлистовые замыкания появляются тогда, когда ротор задевает статор или при наличии оплавлений активной стали вследствие витковых или междуфазных замыканий в обмотке статора. Обнаружить межлистовые замыкания можно при разборке двигателя.
Повышенная вибрация двигателя.
В условиях эксплуатации повышенная вибрация двигателя происходит из-за неправильной центровки его с приводным механизмом или ослабления крепления двигателя к фундаментной плите. Значительно реже в двигателе возникает вибрация, потому что не сбалансирован ротор. Эксплуатация двигателя с повышенной вибрацией недопустима.
Значительно реже в двигателе возникает вибрация, потому что не сбалансирован ротор. Эксплуатация двигателя с повышенной вибрацией недопустима.
Перегрузка двигателя.
Если двигатель перегружен, то при номинальном напряжении сети ток в фазах двигателя превышает номинальное значение, скорость ротора несколько ниже паспортной, обмотки двигателя равномерно перегреваются. При значительных перегрузках обмотки выходят из строя в короткий срок. В случае перегрузки двигателя необходимо немедленно уменьшить нагрузку до такой величины, чтобы ток в фазах не превышал паспортного значения.
Ротор асинхронного двигателя| Electrical4U
Ротор, как следует из названия, представляет собой вращающуюся часть электрической машины, в которой ток индуцируется действием трансформатора из вращающегося магнитного поля.
Ротор асинхронного двигателя бывает двух типов:
- Ротор с короткозамкнутым ротором
- Ротор с обмоткой или ротор с скользящим кольцом
Ротор с короткозамкнутым ротором
В роторе этого типа обмотка ротора состоит из проводников, в форма медных или алюминиевых стержней, заделанных в полузамкнутые пазы многослойного сердечника ротора.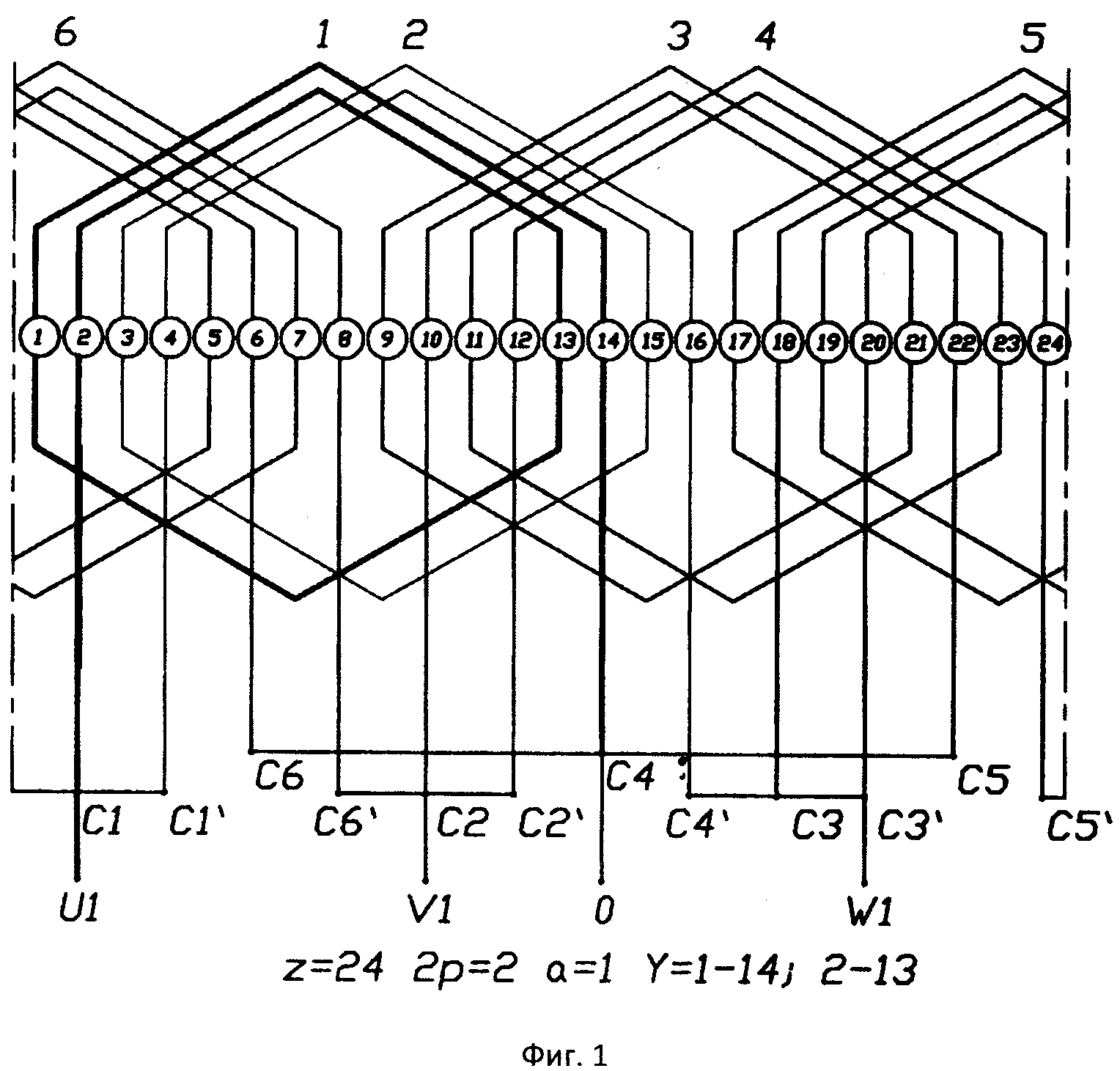 Чтобы облегчить замкнутый путь в цепи ротора, обе стороны стержней ротора закорочены концевыми кольцами.
Чтобы облегчить замкнутый путь в цепи ротора, обе стороны стержней ротора закорочены концевыми кольцами.
Характеристики ротора с короткозамкнутым ротором
Этот тип ротора не имеет определенного количества полюсов, но такое же количество полюсов статора будет индуцироваться в роторе автоматически за счет индукции. Следовательно, для ротора с короткозамкнутым ротором
Ротор с короткозамкнутым ротором имеет очень низкое реактивное сопротивление утечки, поскольку он содержит любую обмотку на роторе, что приводит к низкому пусковому крутящему моменту и максимальному рабочему крутящему моменту.
Поскольку мы знаем, что для увеличения значения установленного крутящего момента мы должны увеличить значение сопротивления ротора, а для его увеличения мы должны вставить сопротивление последовательно с обмоткой ротора, но в случае ротора с короткозамкнутым ротором мы не можем вставить он, так как штанги его ротора закорочены концевым кольцом с обеих сторон. Таким образом, можно сказать, что ротор с короткозамкнутым ротором обеспечивает хорошие рабочие характеристики, но плохие пусковые характеристики.
Таким образом, можно сказать, что ротор с короткозамкнутым ротором обеспечивает хорошие рабочие характеристики, но плохие пусковые характеристики.
Недостатки ротора с короткозамкнутым ротором
- Низкий пусковой момент
- Высокие пусковые токи
- Низкий коэффициент мощности
Но пусковые характеристики ротора с короткозамкнутым ротором можно частично улучшить, изменив конструкцию схемы.
Перекос стержней ротора
Одна из целей перекоса стержней ротора – увеличить значение сопротивления ротора, чтобы можно было улучшить пусковой момент. Мы знаем, что сопротивление пропорционально длине, поэтому из-за перекоса стержней ротора длина стержней увеличивается, следовательно, увеличивается сопротивление и крутящий момент.
Ротор с обмоткой или ротор с контактным кольцом
Этот тип ротора также изготовлен из многослойной холоднокатаной кремнистой стали с ориентированной зернистостью для уменьшения потерь на вихревые токи и гистерезисных потерь. Обмотка ротора распределена также с коротким шагом, чтобы получить на выходе синусоидальную ЭДС.
Обмотка ротора распределена также с коротким шагом, чтобы получить на выходе синусоидальную ЭДС.
Работа асинхронного двигателя невозможна с неодинаковым числом полюсов статора и ротора, и этот тип ротора не реагирует автоматически на изменение числа полюсов статора. Следовательно, количество полюсов ротора должно быть равно количеству полюсов статора.
Если ротор снабжен трехфазными обмотками; обмотки ротора должны быть соединены звездой независимо от того, подключена ли обмотка статора по схеме звезды или треугольника.
Характеристики ротора с обмоткой или ротора с контактным кольцом
Основное различие между ротором с короткозамкнутым ротором и ротором с обмоткой заключается в наличии контактного кольца в роторе с обмоткой , поэтому он также называется ротор с контактным кольцом. Три вывода обмоток ротора, соединенных звездой, выведены наружу и подключены к внешним резисторам через контактное кольцо.
Контактные кольца изготовлены из высокопрочного материала, такого как фосфористая бронза или латунь.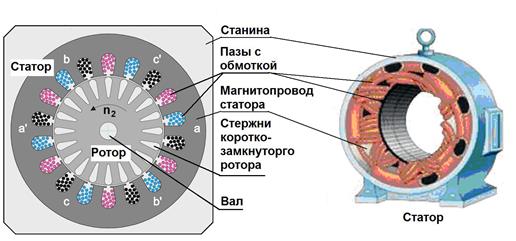 Контакты щеток используются для соединения обмотки ротора с внешней цепью. Щетки изготовлены из углеродного или медного материала, но предпочтительным является углерод из-за его самосмазывающихся свойств. Таким образом, с угольными щетками потери на трение меньше.
Контакты щеток используются для соединения обмотки ротора с внешней цепью. Щетки изготовлены из углеродного или медного материала, но предпочтительным является углерод из-за его самосмазывающихся свойств. Таким образом, с угольными щетками потери на трение меньше.
Для улучшения пускового момента используются внешние резисторы. Этот внешний резистор также ограничивает пусковой ток, потребляемый двигателем во время пуска. Следовательно, коэффициент мощности улучшается.
Посмотрев вышеупомянутые моменты, мы можем сделать вывод, что «из-за наличия дополнительного резистора, ротор с обмоткой или ротор с контактным кольцом типа имеет хорошие рабочие характеристики, но плохие рабочие характеристики»
Электродвигатель | Британника
Самый простой тип асинхронного двигателя показан на рисунке в разрезе.Трехфазный набор обмоток статора вставлен в пазы в железе статора. Эти обмотки могут быть подключены по схеме “звезда”, обычно без внешнего подключения к нейтральной точке, или по схеме “треугольник”. Ротор состоит из цилиндрического стального сердечника с проводниками, размещенными в пазах по всей поверхности. В наиболее обычной форме эти проводники ротора соединены вместе на каждом конце ротора проводящим концевым кольцом.
Ротор состоит из цилиндрического стального сердечника с проводниками, размещенными в пазах по всей поверхности. В наиболее обычной форме эти проводники ротора соединены вместе на каждом конце ротора проводящим концевым кольцом.
Поперечное сечение трехфазного асинхронного двигателя.
Encyclopædia Britannica, Inc. Основы работы асинхронного двигателя можно разработать, сначала предположив, что обмотки статора подключены к трехфазному источнику питания и что набор из трех синусоидальных токов, показанных на рисунке, протекает в обмотках статора. На этом рисунке показано влияние этих токов на создание магнитного поля в воздушном зазоре машины в течение шести моментов цикла. Для простоты показана только центральная токопроводящая петля для каждой фазной обмотки.В момент t 1 на рисунке, ток в фазе a является максимально положительным, тогда как ток в фазах b и c составляет половину отрицательного значения.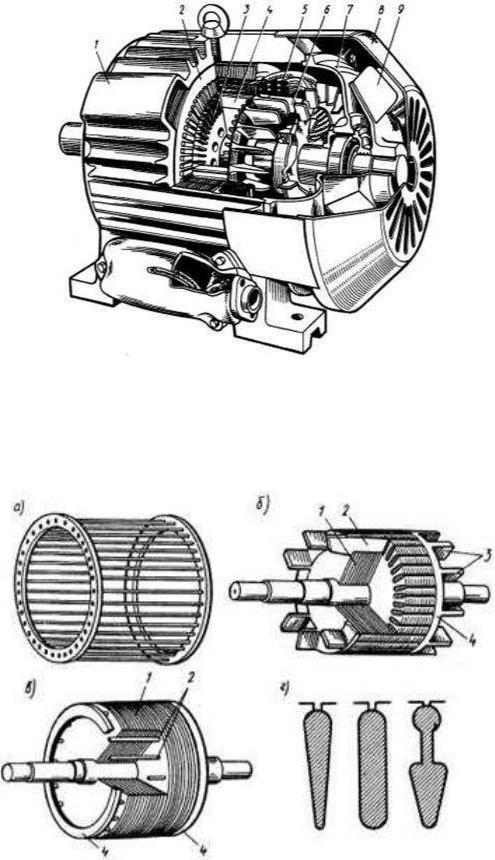 Результатом является магнитное поле с приблизительно синусоидальным распределением вокруг воздушного зазора с максимальным значением наружу вверху и максимальным значением внутрь внизу. В момент времени t 2 на рисунке (т. Е. Одна шестая цикла позже), ток в фазе c является максимально отрицательным, в то время как в фазе b и фазе a составляет половину значения положительный.Результатом, как показано на рисунке для t 2 , снова является синусоидально распределенное магнитное поле, но повернутое на 60 ° против часовой стрелки. Исследование распределения тока для t 3 , t 4 , t 5 и t 6 показывает, что магнитное поле продолжает вращаться с течением времени. Поле совершает один оборот за один цикл токов статора. Таким образом, совокупный эффект трех равных синусоидальных токов, равномерно смещенных во времени и текущих в трех обмотках статора, равномерно смещенных в угловом положении, должен создать вращающееся магнитное поле с постоянной величиной и механической угловой скоростью, которая зависит от частоты электроснабжение.
Результатом является магнитное поле с приблизительно синусоидальным распределением вокруг воздушного зазора с максимальным значением наружу вверху и максимальным значением внутрь внизу. В момент времени t 2 на рисунке (т. Е. Одна шестая цикла позже), ток в фазе c является максимально отрицательным, в то время как в фазе b и фазе a составляет половину значения положительный.Результатом, как показано на рисунке для t 2 , снова является синусоидально распределенное магнитное поле, но повернутое на 60 ° против часовой стрелки. Исследование распределения тока для t 3 , t 4 , t 5 и t 6 показывает, что магнитное поле продолжает вращаться с течением времени. Поле совершает один оборот за один цикл токов статора. Таким образом, совокупный эффект трех равных синусоидальных токов, равномерно смещенных во времени и текущих в трех обмотках статора, равномерно смещенных в угловом положении, должен создать вращающееся магнитное поле с постоянной величиной и механической угловой скоростью, которая зависит от частоты электроснабжение.
Вращательное движение магнитного поля относительно проводников ротора вызывает индуцирование напряжения в каждом из них, пропорциональное величине и скорости поля относительно проводников. Поскольку проводники ротора замкнуты накоротко на каждом конце, это приведет к протеканию токов в этих проводниках. В простейшем режиме работы эти токи будут примерно равны индуцированному напряжению, деленному на сопротивление проводника.Картина токов ротора для текущего момента t 1 рисунка показана на этом рисунке. Видно, что токи приблизительно синусоидально распределены по периферии ротора и расположены так, чтобы создавать вращающий момент против часовой стрелки на роторе (то есть вращающий момент в том же направлении, что и вращение поля). Этот крутящий момент ускоряет ротор и вращает механическую нагрузку. По мере увеличения скорости вращения ротора его скорость относительно скорости вращающегося поля уменьшается.Таким образом, индуцированное напряжение уменьшается, что приводит к пропорциональному снижению тока в проводнике ротора и крутящего момента. Скорость ротора достигает постоянного значения, когда крутящий момент, создаваемый токами ротора, равен крутящему моменту, необходимому на этой скорости для нагрузки, при отсутствии избыточного крутящего момента для ускорения объединенной инерции нагрузки и двигателя.
Вращающееся поле и токи, которые оно создает в короткозамкнутых проводниках ротора.
Encyclopædia Britannica, Inc.Механическая выходная мощность должна обеспечиваться входной электрической мощностью. Исходные токи статора, показанные на рисунке, достаточны только для создания вращающегося магнитного поля. Чтобы поддерживать это вращающееся поле при наличии токов ротора, показанных на рисунке, необходимо, чтобы обмотки статора несли дополнительную составляющую синусоидального тока такой величины и фазы, чтобы нейтрализовать влияние магнитного поля, которое в противном случае могло бы возникнуть. токами ротора на рисунке.Полный ток статора в каждой фазной обмотке складывается из синусоидальной составляющей, создающей магнитное поле, и другой синусоиды, опережающей первую на четверть цикла, или 90 °, для обеспечения необходимой электроэнергии. Второй, или силовой, компонент тока находится в фазе с напряжением, приложенным к статору, в то время как первый, или намагничивающий, компонент отстает от приложенного напряжения на четверть цикла или 90 °. При номинальной нагрузке эта намагничивающая составляющая обычно находится в диапазоне 0.От 4 до 0,6 величины силовой составляющей.
Большинство трехфазных асинхронных двигателей работают с обмотками статора, подключенными непосредственно к трехфазному источнику питания постоянного напряжения и постоянной частоты. Типичные напряжения питания находятся в диапазоне от 230 вольт между фазами для двигателей относительно небольшой мощности (например, от 0,5 до 50 киловатт) до около 15 киловольт между фазами для двигателей большой мощности и до около 10 мегаватт.
За исключением небольшого падения напряжения на сопротивлении обмотки статора, напряжение питания согласуется со скоростью изменения магнитного потока в статоре машины во времени.Таким образом, при питании с постоянной частотой и постоянным напряжением величина вращающегося магнитного поля остается постоянной, а крутящий момент примерно пропорционален силовой составляющей тока питания.
В асинхронном двигателе, показанном на предыдущих рисунках, магнитное поле вращается на один оборот за каждый цикл частоты питания. Для источника с частотой 60 Гц скорость поля составляет 60 оборотов в секунду или 3600 оборотов в минуту. Скорость ротора меньше скорости поля на величину, достаточную для того, чтобы индуцировать необходимое напряжение в проводниках ротора для создания тока ротора, необходимого для момента нагрузки.При полной нагрузке скорость обычно на 0,5–5 процентов ниже полевой скорости (часто называемой синхронной скоростью), причем более высокий процент применяется к двигателям меньшего размера. Эта разница в скорости часто называется скольжением.
Другие синхронные скорости могут быть получены с источником постоянной частоты путем создания машины с большим количеством пар магнитных полюсов, в отличие от двухполюсной конструкции, показанной на рисунке. Возможные значения скорости магнитного поля в оборотах в минуту: 120 f / p , где f – частота в герцах (циклы в секунду), а p – количество полюсов (которое должно быть четное число).Данный железный каркас может быть намотан для любого из нескольких возможных количеств пар полюсов с помощью катушек, охватывающих угол приблизительно (360/ p ) °. Крутящий момент, доступный от рамы машины, останется неизменным, поскольку он пропорционален произведению магнитного поля и допустимого тока катушки. Таким образом, номинальная мощность рамы, являющаяся произведением крутящего момента и скорости, будет примерно обратно пропорциональна количеству пар полюсов. Наиболее распространенные синхронные скорости для двигателей с частотой 60 Гц – 1800 и 1200 оборотов в минуту.
Асинхронный двигатель с ротором– обзор
3.1.3.1 Двигатели переменного тока
Двигатели переменного тока бывают трех основных типов: асинхронные, синхронные и серийные, и определяются следующим образом:
Асинхронные двигатели. Асинхронный двигатель – это двигатель переменного тока, в котором первичная обмотка на одном элементе (обычно статоре) подключена к источнику питания, а многофазная вторичная обмотка или вторичная обмотка с короткозамкнутым ротором – на другом элементе (обычно роторе). несет индуцированный ток.Существует два типа:
Асинхронный двигатель с короткозамкнутым ротором. Асинхронный двигатель с короткозамкнутым ротором – это двигатель, в котором вторичная цепь состоит из обмотки с короткозамкнутым ротором, подходящим образом размещенной в пазах вторичного сердечника.
Асинхронный двигатель с фазным ротором. Асинхронный двигатель с фазным ротором – это асинхронный двигатель, в котором вторичная цепь состоит из многофазной обмотки или катушек, выводы которых либо закорочены, либо замкнуты посредством соответствующих цепей.
Синхронный двигатель. Синхронный двигатель – это синхронная машина, которая преобразует электрическую энергию в механическую.
Двигатель с последовательной обмоткой. Двигатель с последовательной обмоткой – это двигатель, в котором цепь возбуждения и цепь якоря соединены последовательно.
Многофазные двигатели. Многофазные двигатели переменного тока бывают с короткозамкнутым ротором, с фазным ротором или синхронными.
Дизайнерские письма. Многофазные асинхронные двигатели с короткозамкнутым ротором и интегральной мощностью могут быть одного из следующих:
Конструкция A.Конструкция A Двигатель представляет собой двигатель с короткозамкнутым ротором, предназначенный для выдерживания пуска при полном напряжении и развития крутящего момента заторможенного ротора, как показано в MG 1-12.37, крутящего момента, как показано в MG 1-12.39, крутящего момента пробоя, как показано на MG 1-12.38 с током заторможенного ротора, превышающим значения, указанные в MG 1-12.34 для 60 Гц и MG 1-12.25 для 50 Гц, и имеющий скольжение при номинальной нагрузке менее 5 % . Двигатели с 10 или более полюсами могут иметь скольжение чуть больше 5 % .
Конструкция Б .Двигатель конструкции B представляет собой двигатель с короткозамкнутым ротором, предназначенный для выдерживания пуска при полном напряжении и создания крутящих моментов с заторможенным ротором, пробоя и тяги, достаточных для общего применения, как указано в MG 1-12.37, MG 1-12.38 и MG 1. -12.39, потребляющий ток заторможенного ротора, не превышающий значений, указанных в MG 1-12.34 для 60 Гц и MG 1-12.35 для 50 Гц, и имеющий скольжение при номинальной нагрузке менее 5 % . Двигатели с 10 и более полюсами могут иметь скольжение немного больше 5 % .
Конструкция С .Двигатель конструкции C – это двигатель с короткозамкнутым ротором, предназначенный для того, чтобы выдерживать запуск при полном напряжении и развивать крутящий момент с заторможенным ротором для специальных применений с высоким крутящим моментом до значений, указанных в MG 1-12.37, крутящий момент при подъеме, как показано в MG 1- 12.39, момент пробоя до значений, указанных в MG 1-12.38, с током заторможенного ротора, не превышающим значений, показанных в MG 1-12.34 для 60 Гц и MG 1-12.35 для 50 Гц, и с проскальзыванием при номинальной нагрузке. менее 5 % .
Конструкция D . Двигатель конструкции D – это двигатель с короткозамкнутым ротором, который выдерживает пуск при полном напряжении и развивает высокий крутящий момент заторможенного ротора, как показано в MG 1-1.37 с током заторможенного ротора не более, чем указано в MG 1-12.34 для 60 Гц и MG 1-12.35 для 50 Гц, и имеющим скольжение при номинальной нагрузке 5 % или более.
Однофазные двигатели. Однофазные двигатели переменного тока обычно являются асинхронными или последовательными двигателями, хотя однофазные синхронные двигатели доступны в меньших номиналах.
Дизайнерские письма. Однофазные двигатели со встроенной мощностью в лошадиные силы могут быть одной из следующих:
Конструкция L. Двигатель конструкции L представляет собой однофазный двигатель со встроенной мощностью в лошадиных силах, предназначенный для выдерживания пуска при полном напряжении и развития момента пробоя, как показано в MG 1-10.33, с током заторможенного ротора, не превышающим значений, указанных в MG 1- 12.33.
Конструкция M. Двигатель конструкции M представляет собой однофазный двигатель со встроенной мощностью в лошадиных силах, разработанный, чтобы выдерживать пуск при полном напряжении и развивать момент пробоя, как показано в MG 1-10.33, с током заторможенного ротора, не превышающим значения указаны в MG 1-12.33.
Однофазные двигатели с короткозамкнутым ротором. Однофазные асинхронные двигатели с короткозамкнутым ротором классифицируются и определяются следующим образом:
Двухфазный двигатель. Двигатель с расщепленной фазой – это однофазный асинхронный двигатель, оснащенный вспомогательной обмоткой, смещенной в магнитном положении от основной обмотки и подключенной параллельно с ней. Примечание: Если не указано иное, предполагается, что вспомогательная цепь размыкается, когда двигатель достигает заданной скорости.Термин «двигатель с расщепленной фазой», используемый без уточнения, описывает двигатель, который будет использоваться без сопротивления, отличного от импеданса, обеспечиваемого самими обмотками двигателя; другие типы определены отдельно.
Двигатель с резистивным пуском. Двигатель с резистивным пуском – это двигатель с расщепленной фазой, сопротивление которого последовательно подключено к вспомогательной обмотке. Вспомогательный контур размыкается, когда двигатель достигает заданной скорости.
Конденсаторный двигатель. Конденсаторный двигатель – это однофазный асинхронный двигатель, основная обмотка которого предназначена для прямого подключения к источнику питания, а вспомогательная обмотка подключена последовательно с конденсатором. Существует три типа конденсаторных двигателей, а именно:
Двигатель с конденсаторным пуском. Двигатель с конденсаторным запуском – это двигатель с конденсатором, в цепи которого конденсаторная фаза присутствует только в течение периода запуска.
Двигатель с постоянным разделением конденсаторов. Конденсаторный двигатель с постоянным разделением каналов – это конденсаторный двигатель, имеющий одинаковое значение емкости как для пусковых, так и для рабочих условий.
Конденсаторный двигатель с двумя номиналами. Двухзначный конденсаторный двигатель – это конденсаторный двигатель, использующий разные значения эффективной емкости для условий запуска и работы.
Двигатель с расщепленными полюсами. Двигатель с расщепленными полюсами – это однофазный асинхронный двигатель, снабженный вспомогательной короткозамкнутой обмоткой или обмотками, смещенными в магнитном положении относительно основной обмотки. Это приводит к самозапуску двигателя.
Однофазные двигатели с фазным ротором. Двигатели с одинарным ротором определяются и классифицируются следующим образом:
Отталкивающий двигатель. Отталкивающий двигатель – это однофазный двигатель, имеющий обмотку статора, предназначенную для подключения к коммутатору. Щетки на коммутаторе закорочены и размещены так, что магнитная ось обмотки статора. Этот тип двигателя имеет вариаторную характеристику.
Асинхронный двигатель с отталкиванием. Асинхронный двигатель с отталкивающим пуском – это однофазный двигатель, имеющий те же обмотки, что и отталкивающий двигатель, но при заданной скорости обмотка ротора замкнута накоротко или иным образом соединена, чтобы получить эквивалент обмотки с короткозамкнутым ротором.Этот тип двигателя запускается как отталкивающий двигатель, но работает как асинхронный двигатель с характеристиками постоянной скорости.
Отталкивающий асинхронный двигатель. Отталкивающий асинхронный двигатель представляет собой разновидность отталкивающего двигателя, в роторе которого помимо обмотки отталкивающего двигателя находится обмотка с короткозамкнутым ротором. Двигатель этого типа может иметь характеристики постоянной скорости (см. MG1-1.30) или переменной скорости (см. MG 1-1.31).
Универсальные моторы. Универсальный двигатель – это двигатель с последовательной обмоткой, предназначенный для работы примерно с одинаковой скоростью и мощностью на постоянном или однофазном переменном токе с частотой не более 60 циклов / с и примерно одинаковым среднеквадратичным напряжением.Есть два типа:
Двигатели с серийной обмоткой. Двигатель с последовательной обмоткой – это коллекторный двигатель, в котором цепь возбуждения и цепь якоря соединены последовательно.
Двигатель с компенсацией серии. Компенсированный последовательный двигатель – это последовательный двигатель с компенсационной обмоткой возбуждения. (Компенсирующая обмотка возбуждения и последовательная обмотка возбуждения могут быть объединены в одну обмотку возбуждения.)
Разница между статором и ротором (со сравнительной таблицей)
Статор и ротор являются частями электродвигателя.Существенная разница между ротором и статором заключается в том, что ротор – это вращающаяся часть двигателя, тогда как статор – это неподвижная часть двигателя. Другие различия между статором и ротором показаны ниже в сравнительной таблице.
Рама статора , сердечник статора и обмотка статора являются частями статора . Рама поддерживает сердечник статора и защищает их трехфазную обмотку. Сердечник статора несет вращающееся магнитное поле, которое возникает из-за трехфазного питания.
Ротор расположен внутри сердечника статора . Беличья клетка и ротор с фазовой намоткой являются типами ротора. Обмотка ротора возбуждается источником постоянного тока. Обмотка возбуждения создает постоянное магнитное поле в сердечнике ротора.
Содержание: Статор против ротора
- Таблица сравнения
- Определение
- Ключевые отличия
- Заключение
Сравнительная таблица
| Основа для сравнения | Статор | Ротор |
|---|---|---|
| Определение | Это неподвижная часть станка | Это вращающаяся часть двигателя. |
| Детали | Наружная рама, сердечник статора и обмотка статора. | Обмотка ротора и сердечник ротора |
| Питание | Трехфазное питание | Источник постоянного тока |
| Обмотка | Сложная | Легкая |
| Изоляция | Тяжелая | Меньше |
| Потери на трение | Высокие | Низкие |
| Охлаждение | Легко | Сложное |
Определение статора
Статор – это статическая часть двигателя.Основная функция статора – создание вращающегося магнитного поля. Рама статора, сердечник статора и обмотка статора – это три части статора. Сердечник статора поддерживает и защищает трехфазную обмотку статора. Штамповка из высококачественной кремнистой стали составляет сердечник статора.
Определение ротора
Вращающаяся часть двигателя известна как ротор. Сердечник ротора и обмотка ротора являются частью ротора. Обмотка ротора возбуждается источником постоянного тока.Беличья клетка и фазовая намотка – это типы ротора.
Сердечник ротора с короткозамкнутым ротором выполнен из железного цилиндрического сердечника. На внешней поверхности сердечника имеется полукруглая прорезь, на которой размещаются медные или алюминиевые проводники. На концах жилы закорачиваются накоротко с помощью алюминиевых или медных колец.
Работа ротора и статора
Статор создает вращающееся магнитное поле из-за трехфазного питания.Если ротор находится в состоянии покоя, то в них возникает электромагнитная сила из-за явления электромагнитной индукции.
Электромагнитная индукция – это явление, при котором ЭДС индуцируется в проводнике с током из-за переменного магнитного поля. В роторе возникает ток, который заставляет ротор двигаться.
Ключевые различия между статором и ротором
- Статор – это неподвижная часть машины, а ротор – это подвижная часть машины.
- Сердечник статора, обмотка статора и внешняя рама являются тремя частями статора, тогда как сердечник ротора и обмотка возбуждения являются частями ротора.
- Трехфазное питание подается на обмотку статора. Ротор возбуждается источником постоянного тока.
- Обмотка статора более сложная по сравнению с ротором.
- Обмотка статора сильно изолирована, поскольку в ней индуцируется высокое напряжение. А у ротора низкая изоляция.
- Размер обмотки статора велик для пропускания сильного тока по сравнению с обмоткой возбуждения.
- Система охлаждения статора хороша по сравнению с ротором, потому что статор неподвижен.
- Потери на трение меньше в роторе по сравнению со статором из-за его небольшого веса.
Заключение
Статическая часть машины известна как статор. А вращающаяся часть машины известна как ротор. Ротор размещен внутри сердечника статора.Трехфазный ток подается на обмотку статора, которая создает вращающееся магнитное поле. Ротор вращается во вращающемся магнитном поле. Таким образом, ЭДС возникает из-за взаимодействия магнитного поля ротора и статора.
Строительство асинхронного двигателя – Circuit Globe
Трехфазный асинхронный двигатель является предпочтительным типом двигателя. Он в основном используется в промышленных приводах, потому что он очень разумный и мощный, экономичный и надежный.Его также называют асинхронным двигателем, потому что он не работает с синхронной скоростью. Асинхронный двигатель требует минимального обслуживания, а также обладает высокой перегрузочной способностью.
Состав:
Трехфазный асинхронный двигатель в основном состоит из двух частей, называемых статором и ротором . Статор – это неподвижная часть асинхронного двигателя, а ротор – это вращающаяся часть. Конструкция статора аналогична трехфазному синхронному двигателю, а конструкция ротора отличается для разных машин.Конструкция асинхронного двигателя подробно описывается ниже.
Конструкция статора
Статор изготовлен из пластин из высококачественной легированной стали для уменьшения потерь на вихревые токи. Он состоит из трех основных частей, а именно внешней рамы, сердечника статора и обмотки статора.
Наружная рама
Внешний корпус мотора. Его основная функция – поддерживать сердечник статора и защищать внутренние части машины. Для небольших машин внешняя рама отлита, а для больших – изготовлена.На рисунке ниже показана конструкция статора.
Сердечник статора
Сердечник статора изготовлен из штампованной высококачественной кремнистой стали. Его основная функция – переносить переменное магнитное поле, которое вызывает гистерезисные и вихретоковые потери. Штамповки закреплены на станине статора. Каждая штамповка изолирована от другой тонким слоем лака. Толщина штамповки обычно составляет от 0,3 до 0,5 мм. На внутренней стороне штамповок сделаны прорези, как показано на рисунке ниже.
Обмотки статора
Сердечник статора имеет трехфазные обмотки, которые обычно получают питание от трехфазной сети. Шесть выводов обмоток (по две каждой фазы) соединены в клеммной коробке машины. Статор двигателя намотан на определенное количество полюсов в зависимости от скорости двигателя. Если количество полюсов больше, скорость двигателя будет меньше, а если количество полюсов меньше, скорость будет высокой.
Поскольку соотношение между скоростью и полюсом двигателя задается как
Обмотки могут быть соединены пуском и треугольником.
Конструкция ротора
Ротор также состоит из тонких пластин того же материала, что и статор. Ламинированный цилиндрический сердечник установлен непосредственно на валу. Эти ламели имеют прорези на внешней стороне для размещения проводников. Есть два типа ротора.
Ротор с беличьей клеткой
Ротор с короткозамкнутым ротором состоит из многослойного цилиндрического сердечника.Круглые пазы на внешней периферии полузакрыты. Каждый слот содержит неизолированный стержневой провод из алюминия или меди. На конце ротора проводники закорочены тяжелым кольцом из меди или алюминия. Схема ротора сепаратора показана ниже.
Пазы ротора обычно не параллельны валу, а перекошены. Перекос проводников ротора имеет следующие преимущества, указанные ниже.
- Уменьшает гудение и обеспечивает плавную и бесшумную работу.
- Это приводит к равномерной кривой крутящего момента для различных положений ротора.
- Тенденция к блокировке ротора снижена. Поскольку зубья ротора и статора притягиваются друг к другу и блокируются.
- Увеличивает сопротивление ротора за счет увеличенной длины проводников стержня ротора.
Преимущества ротора с короткозамкнутым ротором
Ниже приведены следующие преимущества сепаратора ротора.
- Ротор с сепаратором дешевле, а конструкция прочна.
- Отсутствие щеток снижает риск искрения.
- Его содержание меньше.
- Коэффициент мощности больше
- КПД ротора сепаратора выше.
Ротор с фазовой обмоткой
Ротор с фазовой обмоткой также называется ротором с контактным кольцом. Он состоит из ламинированного цилиндрического сердечника. На внешней периферии ротора имеется полузамкнутая прорезь, в которой расположены 3-фазные изолированные обмотки. Обмотки ротора соединены звездой.
Асинхронный двигатель с контактным кольцом показан на рисунке ниже.
Контактные кольца установлены на валу с опирающимися на них щетками. Щетки подключены к переменному резистору. Функция контактных колец и щеток заключается в обеспечении средств подключения внешних резисторов в цепи ротора. Резистор позволяет изменять сопротивление каждой фазы ротора для достижения следующих целей.
- Увеличивает пусковой момент и уменьшает пусковой ток.
- Используется для управления скоростью двигателя.
Ротор этого типа также перекос. Вал из низкоуглеродистой стали проходит через центр ротора и крепится к нему. Назначение вала – передача механической энергии.
Преимущества ротора с фазовой обмоткой
Ниже приведены преимущества ротора с фазовой обмоткой.
- Высокий пусковой момент и низкий пусковой ток.
- Для управления скоростью двигателя в цепь можно добавить внешнее сопротивление.
Двигатель с обмоткой ротора: что это такое?
Двигатель с фазным ротором – это разновидность трехфазного асинхронного двигателя, предназначенная для обеспечения высокого пускового момента для нагрузок с высокой инерцией при очень низком токе.
Двигатели с фазным ротором также называют двигателями с фазным ротором.
Статор двигателя с фазным ротором такой же, как и у обычного асинхронного двигателя, но ротор имеет трехфазную обмотку, причем каждый из выводов обмотки подключен к отдельным контактным кольцам.Напротив, традиционный асинхронный двигатель (он же «двигатель с короткозамкнутым ротором») имеет обмотки, которые постоянно закорочены концевым кольцом.
Контактные кольца двигателя с фазным ротором содержат щетки, которые образуют внешнюю вторичную цепь, в которую может быть добавлено полное сопротивление (сопротивление). Во время пуска это сопротивление включается последовательно с обмотками ротора. Это добавленное сопротивление заставляет ток ротора идти по фазе с током статора, что увеличивает развиваемый крутящий момент.Но добавленное сопротивление также уменьшает ток во вторичной цепи, поэтому очень высокий пусковой момент может быть получен с низким пусковым током .
Ротор двигателя с фазным ротором имеет трехфазные обмотки, которые соединены с контактными кольцами.Изображение предоставлено: TMEIC
Традиционным асинхронным двигателям с короткозамкнутым ротором при запуске может потребоваться от 400 до более 1000 процентов тока полной нагрузки.
Если полное сопротивление вводится во вторичную цепь при работающем двигателе, ток ротора уменьшается, а скорость двигателя уменьшается.Но по мере того, как скорость двигателя уменьшается, в обмотках ротора индуцируется большее напряжение, и вырабатывается больше тока для создания необходимого крутящего момента при этой пониженной скорости.
Постепенно уменьшая сопротивление , позволяет двигателю набрать нормальную рабочую скорость, обеспечивая плавное ускорение нагрузки. Поддерживая некоторое сопротивление во вторичной цепи, скорость можно контролировать до определенного предела. Но этот метод регулирования скорости теряет свою эффективность с увеличением скорости – примерно до 50 процентов номинальной скорости при полной нагрузке.Когда сопротивление во вторичной цепи полностью закорочено, двигатель электрически ведет себя как традиционный двигатель с короткозамкнутым ротором.
Контактные кольца образуют вторичный внешний контур. Добавление сопротивления в эту цепь изменяет кривую крутящего момента двигателя.Недостатками двигателей с фазным ротором являются сложность и необходимость технического обслуживания контактных колец и щеток по сравнению с традиционными двигателями с короткозамкнутым ротором. Однако двигатели с фазным ротором полезны в приложениях с высокими инерционными нагрузками, таких как большие вентиляторы, насосы и мельницы, поскольку конструкция с фазным ротором позволяет постепенно ускорять нагрузку за счет управления скоростью и крутящим моментом.И они могут развивать очень высокий пусковой крутящий момент в состоянии покоя с низким пусковым током. Хотя в настоящее время преобладают традиционные асинхронные двигатели с приводами с регулируемой скоростью, двигатели с фазным ротором также могут использоваться для приложений с регулируемой скоростью, если не требуется очень точное управление скоростью.
Изображение предоставлено: TECO-Westinghouse Motors, Inc.
Двигатель переменного тока| Основные схемы работы статора и ротора
Ротор двигателя переменного тока
До сих пор о роторе было сказано немногое.В предыдущих примерах предполагалось, что полюса ротора намотаны катушки, как и полюса статора, и снабжены постоянным током для создания полюсов фиксированной полярности. Кстати, именно так синхронный двигатель переменного тока работает. Однако большинство используемых сегодня двигателей переменного тока не являются синхронными. Вместо этого используются так называемые «асинхронные» двигатели. рабочие лошадки индустрии. Так чем же отличается асинхронный двигатель? Большая разница заключается в том, как протекает ток. подается на ротор.Это не внешний источник питания. Как вы можете догадаться из названия двигателя, используется индукционная техника. вместо.Индукция – еще одна характеристика магнетизма. Это естественное явление, которое возникает, когда проводник (алюминиевые стержни в случае ротора, см. рисунок 13) перемещается через существующее магнитное поле или когда магнитное поле перемещается мимо проводника. В В любом случае, относительное движение двух вызывает электрический ток, протекающий в проводнике.Это называется «индуцированный» текущий поток. Другими словами, в асинхронном двигателе протекание тока в роторе не вызвано каким-либо прямым подключением проводников к источнику напряжения, а скорее влияние проводников ротора, пересекающих линии потока, создаваемые магнитные поля статора. Индуцированный ток, который создается в роторе, вызывает магнитное поле вокруг ротора. проводники, как показано на рисунке 14.Это магнитное поле вокруг каждого проводника ротора заставляет каждый проводник ротора действовать как постоянный магнит в примере на Рисунке 9. Поскольку магнитное поле статора вращается из-за действия трехфазного Источник питания переменного тока, индуцированное магнитное поле ротора притягивается и будет следовать за вращением. Ротор подключен к вал двигателя, поэтому вал вращается и приводит в движение соединительную нагрузку.
