
Параметрические преобразователи
В параметрических преобразователях выходной величиной является параметр электрической цепи (R, L, М, С). При использовании параметрических преобразователей необходим дополнительный источник питания. Параметрические преобразователи весьма разнообразны по своему устройству, назначению и областям применения. Ниже приводятся описание устройства и основы теории параметрических преобразователей, получивших наибольшее практическое распространение.
Реостатные преобразователи
|
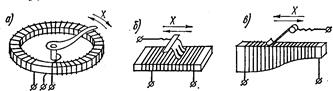
Рис. 4.1.2 Реостатные преобразователи для угловых (а), линейных (б) перемещений и для функционального преобразования линейных перемещений (в) |
|
Рис. 4.1.3 Схема уровнеметра |

Выходной параметр реостатных преобразователей – сопротивление – измеряется обычно с помощью мостовой схемы.
К достоинствам преобразователей относится возможность получения высокой точности, значительных по уровню выходных сигналов и относительная простота конструкции. Недостатки – наличие скользящего контакта, необходимость относительно больших перемещений движка, а иногда и значительного усилия для его перемещения.
Применяются реостатные преобразователи для преобразования сравнительно больших перемещений (угловых, линейных) и других электрических величин (усилия, давления и т.д.), которые могут быть преобразованы в перемещение.
|
Рис. 4.1.4 Преобразователи с угольными шайбами |
|
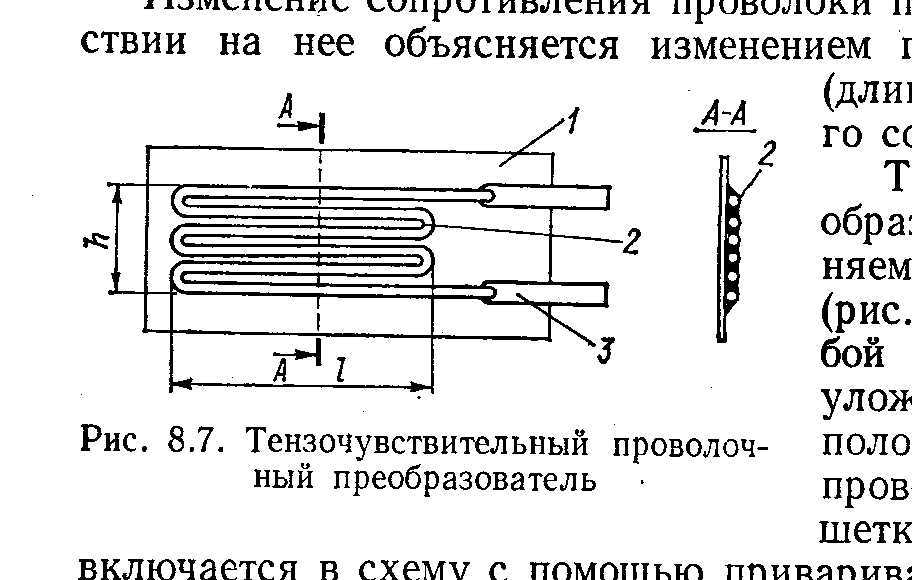
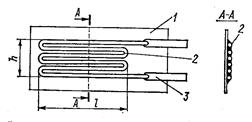
Рис. 4.1.5 Тензочувствительный проволочный преобразователь |

studfile.net
58. Параметрические измерительные преобразователи.
1)Реостатные
R=f(α)
2) Тензорезисторы
Используются для контроля малых механ-х перемещений (на мостах, зданих)
П рименяются
для измерения давления. Такие датчики
характеризуются относительной
тензочувствительностью:
рименяются
для измерения давления. Такие датчики
характеризуются относительной
тензочувствительностью: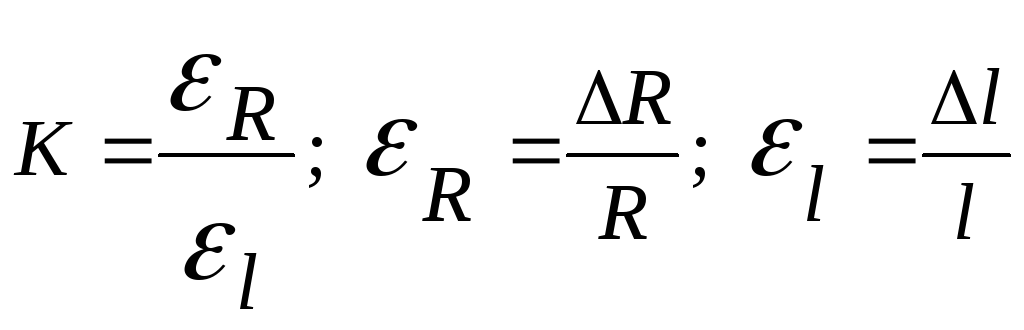
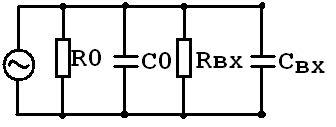
3) Электростатические преобразователи (емкостные):
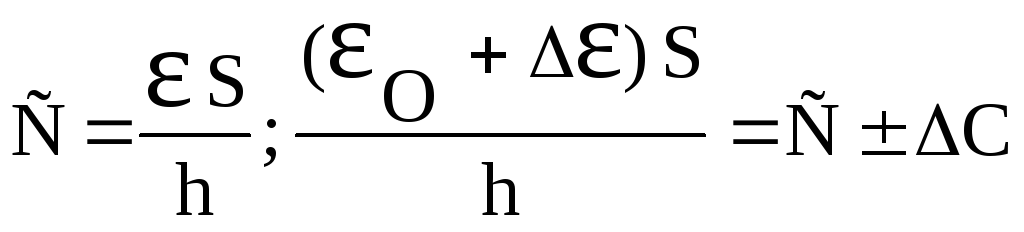
Можно измерять уровень жидкости в баке:
(С0-С1)≈h
4) Индуктивные
Конструктивно выглядят следующим образом:

W – колич-во витков в катушке,
ω – частота,
RH – сопротивление затвора(???)
RM– сопротивление магнитопровода(?)
59. Генераторные измерительные преобразователи
1) Пьезоэлектрические преобразователи силы, давления, скорости и ускорения
В основе работы таких приборов лежит следующее: Если на кристалл
оказывается давление, то на его поверхности создается заряд:
Это прямой пьезоэффект. Если же подать на пластину ток, то она изменит свои размеры – это обратный пьезоэффект.Прямой пьезодатчик – датчик давления, силы и т.п.(d11 – пьезомодуль).


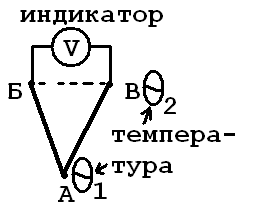
2) Термоэлектрические преобразователи
 θ1–
θ2=Е(БВ)
θ1–
θ2=Е(БВ)
Е(БВ)
Это называется термопарой. В качестве материала может быть никель, хром.
КПД таких термопар невысок, но достоинство их состоит в том, что они просты, позволяют измерять температуры от 0К до тысяч К.
60. Измерительные цепи для работы параметрических преобразователей.
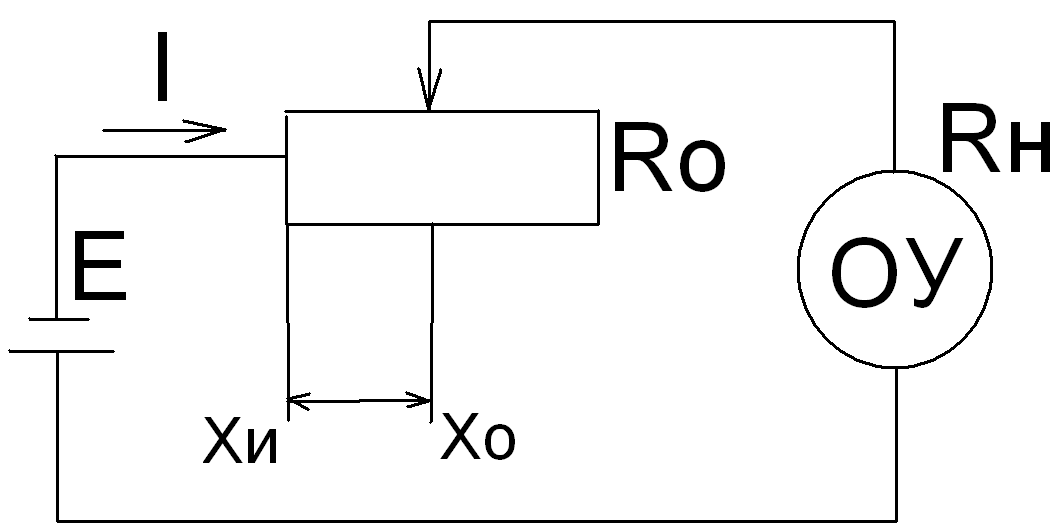 Простейшей
является цепь последовательных
включений.
Простейшей
является цепь последовательных
включений.


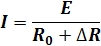
Недостаток – нелинейная зависимость.
Для устранения нелинейности :
используют градуировочные таблицы;
Используется нелинейная шкала;
Работают на малых участках, чтобы зависимость была близка линейной.
Вопрос 61. Автоматизация измерений и контроля. Измерительные вычислительные и измерительные информационные системы.
Необходимость измерения и обработки информации в небольшой промежуток времени, которая появляется в процессе производства, в науке и др. потребовало создания таких средств измерения, которые могли бы производить такие измерения и контроль при одновременном исключении из результата погрешностей.
Необходимо, чтобы все настройки и регулировки происходили автоматически
Необходимо все косвенные методы заменить прямыми.
Создание многофункциональных приборов
Разработка панорамных измерительных приборов.
Применение процессоров.
Разработка измерительных вычислительных комплексов (ИВК).
Разработка информационных измерительных систем (ИИС).
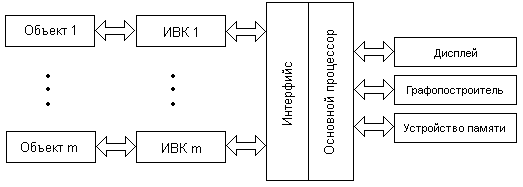
Под ИВК понимается автоматизированное средство измерения, управляемое процессором.
Структура ИВК:
Кол – во измеряемых параметров на исследуемом объекте может быть от нескольких единиц до нескольких сотен, а число исследуемых объектов может быть от одного до нескольких сотен. Часто объекты исследования могут быть рассредоточены в пространстве, в этом случае используют многоуровневые ИВК.
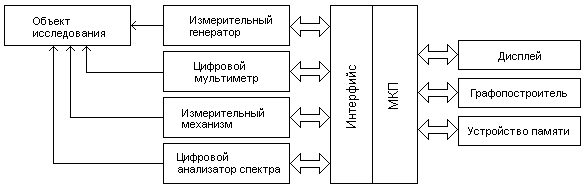
Для ИИС характерны не только регистрация, сбор и переда измерений на обработку, но и проведение измерительных экспериментов при активном воздействии на объект исследования. В этом случае оператору предоставлена возможность вмешиваться в работу (в режиме диалога). Обобщенная схема ИИС:
Для ИИС характерны не только регистрация, сбор и переда измерений на обработку, но и проведение измерительных экспериментов при активном воздействии на объект исследования. В этом случае оператору предоставлена возможность вмешиваться в работу (в режиме диалога). Обобщенная схема ИИС:

Разнообразие ИИС и условий их функционирования потребовало агрегатного способа конструирования ИИС из агрегатных узлов. Типовые устройства ИИС определяют ??? и используемых ИВК.
К типовым устройствам могут относится:
1) Датчики – воспринимающие измеряемые величины от объекта и преобразующие их в некоторый параметр выходного сигнала .
2) Нормализующие преобразователи, необходимые для преобразования неунифицированных сигналов в унифицированные.
3) АЦП – преобразующий в код временные или амплитудные сигналы
4) Коммутаторы – осуществляющие поочередное подключение выходных сигналов с датчиков на общий выход.
5) Линии связи для передачи данных в цифровой или аналоговой форме.
6) Процессоры (ЭВМ) со всеми периферийными устройствами.
studfile.net
Параметрические измерительные преобразователи — КиберПедия
Выходной величиной в параметрических преобразователях является параметр электрической цепи – электрическое сопротивление или его составляющие (R, L, C). Для использования параметрического преобразователя необходим дополнительный источник питания, обеспечивающий образование выходного сигнала преобразователя.
К наиболее часто применяемым параметрическим преобразователям относятся реостатные, тензочувствительные (тензорезисторы), термочувствительные (терморезисторы или термометры сопротивления), индуктивные, емкостные, оптоэлектронные (фоторезисторы, фотодиоды и др.), ионизационные и др.
Принцип действия реостатных преобразователей основан на изменении электрического сопротивления проводника под влиянием входной величины – механического перемещения. Реостатный преобразователь (рис.3.1) представляет собой реостат, подвижный контакт которого перемешается под действием измеряемой неэлектрической величины. Обмотку преобразователя изготавливают из сплавов (платина с иридием, константан, нихром, фехраль и др.).
Подобные преобразователи обладают статической характеристикой преобразования со ступенчатым характером, поскольку сопротивление измеряется скачками, равными сопротивлению одного витка, что вызывает погрешность
где DR – сопротивление одного витка;
R – полное сопротивление преобразователя.
|
Эта погрешность отсутствует в реохордных преобразователях, в которых щетка скользит вдоль оси проволоки.
Для получения нелинейной функции преобразования применяют функциональные реостатные преобразователи. Нужный характер преобразования часто достигается профилированием каркаса преобразователя (рис.3.1, в).
Достоинства реостатного преобразователя: относительная простота конструкции, возможность получения высокой точности преобразования и значительных по уровню выходных сигналов. Основной недостаток – наличие скользящего контакта.
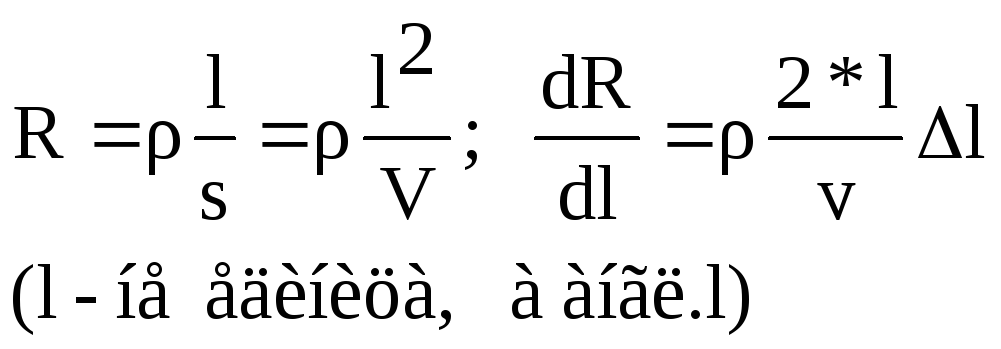
Тензоэффект, положенный в основу работы тензорезисторов, заключается в измерении активного сопротивления проводника (полупроводника) под действием вызываемого в нем механического напряжения и деформации.
Если проволоку подвергнуть механическому воздействию, например, растяжению, то сопротивление ее изменится. Относительное изменение сопротивления проволоки
DR/R = S ∙Dl/l ,
где S – коэффициент тензочувствительности;
Dl/l – относительная деформация проволоки.
Изменение сопротивления проволоки при механическом воздействии на нее объясняется изменением геометрических размеров (длины, диаметра) и удельного сопротивления материала.
Тензочувствительные проволочные преобразователи представляют собой тонкую зигзагообразно уложенную и приклеенную к подложке проволоку. Преобразователь устанавливают таким образом, чтобы направление ожидаемой деформации совпадало с продольной осью проволочной решетки. В качестве материала для преобразователя обычно используют константановую проволоку (у константана – малый температурный коэффициент сопротивления) и для подложки – тонкую бумагу (0,03…0,05 мм) и плёнку лака либо клея (БФ-2, БФ-4, бакелитовый и др.).
Распространение также получили фольговые преобразователи, у которых вместо проволоки используется фольга, и пленочные тензорезисторы, получаемые путем возгонки тензочувствительного материала с последующим осаждением его на подложку.
Достоинства тензорезисторов: линейность статической характеристики преобразования, простота конструкции и малые габариты. Основной недостаток – низкая чувствительность.
В тех случаях, когда требуется высокая чувствительность, находят применение полупроводниковые тензочувствительные преобразователи (поликристаллические из порошкообразного полупроводника и монокристаллические из кристалла кремния). Поскольку чувствительность полупроводниковых тензорезисторов в десятки раз выше, чем у металлических, и, кроме того, интегральная технология позволяет в одном кристалле кремния формировать одновременно как тензорезисторы, так и микроэлектронный блок обработки, то в последние годы получили преимущественное развитие интегральные полупроводниковые тензочувствительные преобразователи. Такие элементы реализуются либо по технологии диффузионных резисторов с изоляцией их от проводящей кремниевой подложки p-n-переходами – технология «кремний на кремнии», либо по гетероэпитаксиальной технологии «кремний на диэлектрике» на стеклокерамике, кварце или сапфире. Для тензочувствительных преобразователей, особенно полупроводниковых, существенно влияние температуры на их упругие и электрические характеристики, что требует применения специальных схем температурной компенсации погрешностей (в частности, с этой целью в расширенной схеме тензомоста используются компенсационные резисторы и терморезисторы). Особенно широкое применение в изготовлении измерительных преобразователей давления в силу своих высоких механических, изолирующих и теплоустойчивых качеств получила технология КНС – «кремний на сапфире».
Совершенствование технологии изготовления полупроводниковых тензорезисторов создало возможность изготавливать тензорезисторы непосредственно на кристаллическом элементе, выполненном из кремния или сапфира. Упругие элементы кристаллических материалов обладают упругими свойствами, приближающимися к идеальным. Сцепление тензорезистора с мембраной за счет молекулярных сил позволяют отказаться от использования клеющих материалов и улучшить метрологические характеристики преобразователей. На рис.3.2, а показана сапфировая мембрана 3 с расположенными на ней однополосковыми тензорезисторами p-типа с положительной 1 и отрицательной 2 чувствительностями. Положительной чувствительностью обладает тензорезистор, у которого отношение >0, если же <0 – чувствительность отрицательна.
Структура однополоскового тензорезистора приведена на рис.3.2, б. Здесь: 1 – тензорезистор; 2 – защитное покрытие; 3 – металлизированные токоведущие дорожки; 4 – упругий элемент преобразователя (сапфировая мембрана). Тензорезисторы можно располагать на мембране так, что при деформации они будут иметь разные по знаку приращения сопротивления. Это позволяет создавать мостовые схемы, в каждое из плеч которого включаются тензорезисторы с соответствующим значением и даже термокомпенсационные элементы.
Тензорезисторы применяют для измерения деформаций и других неэлектрических величин – усилий, давлений, моментов и т.п.
Принцип действия терморезистора основан на зависимости электрического сопротивления проводников или полупроводников от температуры.По режиму работы терморезисторы различают перегревные и без преднамеренного перегрева. Перегревные используют для измерения скорости, плотности, состава среды и др. В перегревных преобразователях электрический ток вызывает перегрев, зависящий от свойств среды. Последние применяются для измерения температуры окружающей среды.
Распространение получили терморезисторы, выполненные из медной или платиновой проволоки. Стандартные платиновые терморезисторы применяют для измерения температуры в диапазоне от –260 до +1100 °С, медные – в диапазоне от –200 до +200 °С (ГОСТ 6651–78). Низкотемпературные платиновые терморезисторы (ГОСТ 12877–76) применяют для измерения температуры в пределах от –261 до –183°С.
На рис.3.3, а показано устройство платинового терморезистора. В каналах керамической трубки 2 расположены две (или четыре) секции спирали 3 из платиновой проволоки, соединенные между собой последовательно.
Рисунок 3.3 − Устройство и внешний вид арматуры платинового
термометра сопротивления
К концам спирали припаивают выводы 4, используемые для включения терморезистора в измерительную цепь. Крепление выводов и герметизацию керамической трубки производят глазурью 1. Каналы трубки засыпают порошком безводного оксида алюминия, выполняющим роль изолятора и фиксатора спирали. Порошок безводного оксида алюминия, имеющий высокую теплопроводность и малую теплоемкость, обеспечивает хорошую передачу теплоты и малую инерционность терморезистора. Для защиты терморезистора от механических и химических воздействий внешней среды его помещают в защитную арматуру (рис.3.3, б) из нержавеющей стали.
Для медных терморезисторов зависимость сопротивления от температуры выражается уравнением
R=R0∙ (1+α t) при –50 0С ≤ t ≤ +180 0С,
где R0 – сопротивление при t=0 0С; α = 4,26∙10–3 К–1.Для платиновых –
R=R0∙[1+А t+В t2] при 0 0С ≤ t ≤ +650 0С,
где А=3,968∙10–3 К–1; В=5,847∙10–7 К–2; С=–4,22∙10–12 К–4.
Помимо платины и меди, для изготовления терморезисторов используют никель (в странах дальнего зарубежья).
Для измерения температуры применяют также полупроводниковые терморезисторы (термисторы и позисторы) различных типов, которые характеризуются большой чувствительностью (температурный коэффициент сопротивления ТКС термисторов отрицательный и при 20°С в 10–15 раз превышает ТКС меди и платины, ТКС позисторов положительный и несколько хуже) и имеют более высокие сопротивления (до 1 МОм) при весьма малых размерах. Недостаток термисторов – плохая воспроизводимость и нелинейность характеристики преобразования.
Термисторы используются в диапазоне температур от –60 до +120°C.
где R и R0 – сопротивления терморезистора при температурах соответственно t и t0;
t0 – начальная температура рабочего диапазона;
В – коэффициент преобразования.
К термочувствительным преобразователям относят также термодиоды и термотранзисторы, у которых при изменении температуры изменяется величина сопротивления р-n перехода. Эти приборы обычно применяются в диапазоне от –80° до +150° С. Чаще всего термодиоды и терморезисторы включают в мостовые цепи и измерительные схемы в виде делителей напряжения. К достоинствам таких преобразователей относят высокие чувствительность и надежность, малые габариты, невысокую стоимость и малую инерционность. Основные недостатки: узкий диапазон рабочей температуры и плохая воспроизводимость статической характеристики преобразователя.
Принцип действия индуктивных преобразователей основан на зависимости индуктивности или взаимной индуктивности обмоток на магнитопроводе от положения, геометрических размеров и магнитного состояния элементов их магнитной цепи (рис.3.4). На рис.3.4 схематически показаны различные типы индуктивных преобразователей. Индуктивный преобразователь (рис.3.4, а) с переменной длиной воздушного зазора δ характеризуется нелинейной зависимостью L = f (δ). Такой преобразователь обычно применяют при перемещениях якоря на 0,01—5 мм.
Рисунок 3.4 − Различные конструкции индуктивных преобразователей
Значительно меньшей чувствительностью, но линейной зависимостью L = f (s) отличаются преобразователи с переменным сечениемвоздушного зазора (рис.3.4, б). Эти преобразователи используют при перемещениях до 10…15 мм.
Широко распространены индуктивные дифференциальные преобразователи (рис.3.4, в), в которых под воздействием измеряемой величины одновременно и притом с разными знаками изменяются два зазора электромагнитов. Дифференциальные преобразователи в сочетании с соответствующей измерительной цепью (обычно мостовой) имеют более высокую чувствительность, меньшую нелинейность характеристики преобразования, испытывают меньшее влияние внешних факторов и сниженное результирующее усилие на якорь со стороны электромагнита, чем недифференциальные преобразователи.
На рис.3.4,г показана схема включения дифференциального индуктивного преобразователя, у которого выходными величинами являются взаимные индуктивности. Такие преобразователи называют взаимно-индуктивными или трансформаторными. При питании первичной обмотки переменным током и при симметричном положении якоря относительно электромагнитов ЭДС на выходных зажимах равна нулю. При перемещении якоря на выходных зажимах появляется ЭДС.
Для преобразования сравнительно больших перемещений (до 50…100 мм) применяют трансформаторные преобразователи с незамкнутой магнитной цепью (рис.3.4, д).
В горной промышленности получили распространение магнитоупругие преобразователи (рис.3.4, е), действие которых основано на использовании эффекта зависимости магнитной проницаемости (магнитного сопротивления цепи) от величины механического воздействия (сжатия или растяжения) на ферромагнитный сердечник преобразователя. Различают магнитоупругие датчики дроссельного и трансформаторного типов. Последние могут контролировать только усилие сжатия, однако обладают большей чувствительностью.
Достоинствами индуктивных и магнитоупругих преобразователей являются простота и надежность в работе, значительная мощность выходных сигналов. Основными недостатками – обратное воздействие преобразователя на исследуемый объект (воздействие электромагнита на якорь) и влияние инерции якоря на частотные характеристики прибора.
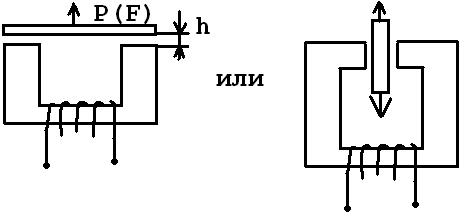
Принцип действия емкостных преобразователей основан на зависимости электрической емкости конденсатора от размеров, взаимного расположения его обкладок и от значения диэлектрической проницаемости среды между ними. Они представляют собой конденсаторы различных конструкций, преобразующие механические линейные или угловые перемещения, а также давление, влажность или уровень среды в изменение электрической емкости.
в)
Рисунок 3.5 − Различные конструкции емкостных преобразователей
Применяют также дифференциальные преобразователи (рис.3.5, б), у которых имеется одна подвижная и две неподвижные пластины. При воздействии измеряемой величины ху этих преобразователей одновременно изменяются емкости С1и С2. Такие преобразователи используют для измерения сравнительно больших линейных (более 1 мм) и угловых перемещений. В этих преобразователях легко получить требуемую характеристику преобразования путем профилирования пластин.
Преобразователи с использованием зависимости C = f1 ( ) применяют для измерения уровня жидкостей, влажности веществ, толщины изделий из диэлектриков и т. п. Для примера (рис.3.5, в) приведем устройство емкостного уровнемера. Емкость между электродами, опущенными в сосуд, зависит от уровня жидкости, так как изменение уровня ведет к изменению средней диэлектрической проницаемости среды между электродами. Изменением конфигурации пластин можно получить желаемый характер зависимости показаний прибора от объема (массы) жидкости.
Для измерения выходного параметра емкостных преобразователей применяют мостовые цепи и цепи с использованием резонансных контуров. Последние позволяют создавать приборы с высокой чувствительностью, способные реагировать на перемещения порядка 10–7 мм. Цепи с емкостными преобразователями обычно питают током повышенной частоты (до десятков мегагерц), что вызвано желанием увеличить сигнал, попадающий в измерительный прибор, и необходимостью уменьшить шунтирующее действие сопротивления изоляции.
Достоинства емкостных датчиков: простота конструкции, малые размеры и масса, высокая чувствительность и малая инерционность. Основные недостатки – необходимость в источниках питания повышенной частоты и вредное влияние паразитных емкостей, температуры, влажности и внешних электрических полей.
Полупроводниковые фоточувствительные преобразователи в качестве чувствительного элемента имеют светочувствительный слой, нанесенный на подложку (стеклянную пластинку). Сопротивление этого слоя обратно пропорционально интенсивности светового потока или мощности источника освещения. Фоторезисторы, фотодиоды и фототранзисторы обладают сравнительно высокой стабильностью, хорошей чувствительностью, но их применение ограничивается при наличии пыли, например угольной, препятствующей нормальной работе.
Действие ионизационных преобразователей основано на явлении ионизации газа или люминесценции некоторых веществ под действием ионизирующего излучения. В качестве ионизирующих агентов применяют a–, b– и g–лучи радиоактивных веществ, иногда рентгеновские лучи и нейтронное излучение. Выбор типа ионизационного преобразователя зависит во многом от ионизирующего излучения. Гамма–лучи (электромагнитные колебания малой длины волны – 10–8…10–11 см)обладают большой проникающей способностью.
Конструкции ионизационных камер и счетчиков разнообразны и зависят от вида излучения. В качестве источников ионизирующего излучения обычно используют кобальт-60, стронций-90, плутоний-239 и др.
Преимущества ионизационных преобразователей – в возможности бесконтактных измерений в агрессивных или взрывоопасных средах, средах, имеющих высокою температуру или находящихся под большим давлением. Основной недостаток: необходимость применения биологической защиты при высокой активности источника излучения.
Генераторные преобразователи
В генераторных преобразователях выходной величиной является ЭДС или заряд, функционально связанный с измеряемой неэлектрической величиной.
Рассмотрим наиболее распространенные виды генераторных преобразователей.
Термоэлектрические преобразователи работают на термоэлектрическом эффекте, возникающем в цепи термопары: при разности температур в точках 1 и 2 (рис.3.6) соединения двух разнородных проводников в цепи термопары возникает термоЭДС.
Точку соединения проводников (электродов) 1 называют рабочим концом термопары, точки 2 и 2′ – свободными концами. Чтобы термоЭДС в цепи термопары однозначно определялась температурой рабочего конца, необходимо температуру свободных концов термопары поддерживать одинаковой и неизменной. Градуировку термоэлектрических термометров производят обычно при температуре свободных концов 0°С. Градуировочные таблицы для стандартных термопар также составлены при условии равенства температуры свободных концов 0°С. При практическом применении термоэлектрических термометров температура свободных концов термопары обычно не равна 0°С и поэтому необходимо вводить поправку.
Тахогенераторы предназначены для измерения угловой скорости вращающихся объектов. Ротор тахогенераторов механически связывают с валом испытуемого электродвигателя или исполнительного механизма, а об угловой скорости w судят по выходной ЭДС генератора.
Из тахогенераторов наибольшее распространение получили тахогенераторы постоянного тока, выпускаемые с постоянными магнитами либо с независимым возбуждением. Область их применения весьма разнообразна: прецизионные тахогенераторы постоянного тока используются в авиации, судостроении, станкостроении, металлургической и других отраслях промышленности. К преимуществам этих датчиков относят достаточно высокую точность и наличие выходного сигнала постоянного тока, удобного для последующей обработки. Основным недостатком этих тахогенераторов является наличие коллекторно-щеточного узла, снижающего надежность работы и долговечность преобразователя.
Синхронные тахогенераторы имеют малое внутреннее сопротивление, что позволяет получить от них достаточно большие мощности. При изменении частоты вращения ротора в синхронных машинах изменяется не только амплитуда выходного напряжения, но и его частота. Благодаря механической устойчивости синхронные тахогенераторы нашли применение в трамваях, локомотивах, крановом хозяйстве и др.
Асинхронные тахогенераторы по конструкции подобны двухфазным асинхронным двигателям. Их роторы обычно выполняют в виде тонкостенного металлического цилиндра. Две обмотки статора тахогенератора сдвинуты на 90° относительно друг друга. К одной обмотке подводят напряжение питания, а с измерительной обмотки снимают ЭДС. При подаче напряжения питания постоянной величины и частоты пульсирующий магнитный поток, пересекая ротор, индуктирует в измерительной обмотке ЭДС, пропорциональную угловой скорости w ротора, приводимого в движение контролируемой машиной или механизмом. Основное достоинство асинхронных тахогенераторов состоит в том, что независимо от частоты вращения ротора ЭДС переменного тока на выходе такого тахогенератора имеет постоянную частоту.
К основным недостаткам тахогенераторов относят ограниченный частотный диапазон измеряемых величин. В последние годы тахогенераторы постепенно вытесняются фотоимпульсными и индукционными датчиками, а также специальными интеллектуальными преобразователями – шифраторами углового перемещения (положения).
В фотоимпульсных датчиках импульсы в оптоэлектронной паре источник излучения – приемник излучения (светодиод – фотопреобразователь) создаются при помощи дисков с прорезями или отверстиями, в некоторых приводах применяют вращающиеся детали машин. В подавляющем большинстве шифраторов положения также используют в качестве чувствительного элемента оптоэлектронную пару.
Импульсы индукционных датчиков создаются под влиянием пульсирующего или знакопеременного магнитного потока. В качестве тела, модулирующего поток, служат специальные зубчатые колеса либо вращающиеся ферромагнитные детали машин.
В пьезоэлектрических преобразователях используется эффект появления электрических зарядов на поверхности некоторых кристаллов (кварц, турмалин, сегнетова соль и др.) под влиянием механических напряжений.
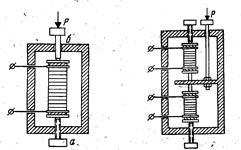
Рисунок 3.7
Устройство пьезоэлектрического преобразователя для измерения переменного давления газа показано на рис.3.7. Давление Рчерез металлическую мембрану 1 передается на зажатые между металлическими прокладками 2 кварцевые пластинки 3. Шарик 4 способствует равномерному распределению давления по поверхности кварцевых пластинок. Средняя прокладка соединена с выводом 5, проходящим через втулку из хорошего изоляционного материала. При воздействии давления Рмежду выводом 5 и корпусом преобразователя возникает разность потенциалов
Практическая работа №4
cyberpedia.su
Параметрические измерительные преобразователи
ЛЕКЦИЯ 16.
Параметрические измерительные преобразователи
Термометры сопротивления.
Термометры сопротивления как и термопары, предназначены для измерения температуры газообразных, твердых и жидких тел, а также температуры поверхности. Принцип действия термометров основан на использовании свойства металлов и полупроводников изменять свое электрическое сопротивление с температурой. Для проводников из чистых металлов эта зависимость в области температур от 200оС до 0оС имеет вид:
Rt = R0[1 + At + Bt2 + C(t 100)t3],
а в области температур от 0оС до 630оС
Rt = R0[1 + At + Bt2),
где Rt, R0 сопротивление проводника при температуре t и 0о С; А, В, С – коэффициенты; t температура, оС.
В диапазоне температур от 0оС до 180оС зависимость сопротивления проводника от температуры описывается приближенной формулой
Rt = R0(1 + t),
где – температурный коэффициент сопротивления материала проводника (ТКС).
Для проводников из чистого металла град-1Для полупроводниковых материалов зависимость сопротивления от температуры имеет вид
RT = Aexp(B/T),
где А, В постоянные; Т температура, оК.
Измерение температуры термометром сопротивления сводится к измерению его сопротивления Rt с последующим переходом к температуре t по формулам или градуировочным таблицам.
Различают проволочные и полупроводниковые термометры сопротивления. Проволочный термометр сопротивления представляет собой тонкую проволоку из чистого металла, закрепленную на каркасе из термостойкого материала (чувствительный элемент), помещенную в защитную арматуру (рис. 16.1). Выводы от чувствительного элемента подведены к головке термометра.
Выбор для изготовления термометров сопротивления проволок из чистых металлов, а не сплавов, обусловлен тем, что ТКС чистых металлов больше, чем ТКС сплавов и, следовательно, термометры на основе чистых металлов обладают большой чувствительностью.
Промышленностью выпускаются платиновые, никелевые и медные термометры сопротивления. Для обеспечения взаимозаменяемости и единой градуировки термометров стандартизованы величины их сопротивления R0 и ТКС. В табл. 16.1 приведены основные данные о термометрах сопротивления.
Т а б л и ц а 16.1. Параметры термометров сопротивления
Тип термометра | Материал чувствительного элемента | Диапазон температур применения, оС |
ТСП ТСН ТСМ | Платина Никель Медь | -260…1100 -50…180 -200…200 |
Зависимость сопротивления термометров ТСП, ТСН и ТСМ от температуры дается стандартными градуировочными таблицами, составленными для ряда значений R0 ( 1, 10, 50, 100, 500 Ом).
Полупроводниковые термометры сопротивления (термисторы) представляют собой бусинки, диски или стержни из полупроводникового материала с выводами для подключения в измерительную цепь.
Промышленность серийно выпускает множество типов термисторов в различном конструктивном оформлении.
Размеры термисторов, как правило, малы около нескольких миллиметров, а отдельные типы десятых долей миллиметра. Для предохранения от механических повреждений и воздействия среды термисторы защищаются покрытиями из стекла или эмали, а также металлическими чехлами.
Термисторы обычно имеют сопротивление от единиц до сотен кОм; их ТКС в рабочем диапазоне температур на порядок больше, чем у проволочных термометров. В качестве материалов для рабочего тела термисторов используют смеси оксидов никеля, марганца, меди, кобальта, которые смешивают со связующим веществом, придают ему требуемую форму и спекают при высокой температуре. Применяют термисторы для измерения температур в диапазоне от 100 до 300оС. Инерционность термисторов сравнительно невелика. К числу их недостатков следует отнести нелинейность температурной зависимости сопротивления, отсутствие взаимозаменяемости из-за большого разброса номинального сопротивления и ТКС, а также необратимое изменение сопротивления во времени.
Для измерения в области температур, близких к абсолютному нулю, применяются германиевые полупроводниковые термометры.
Измерение электрического сопротивления термометров производится с помощью мостов постоянного и переменного тока или компенсаторов. Особенностью термометрических измерений является ограничение измерительного тока с тем, чтобы исключить разогрев рабочего тела термометра. Для проволочных термометров сопротивления рекомендуется выбрать такой измерительный ток, чтобы мощность, рассеиваемая термометром, не превышала 20…50 мВт. Допустимая рассеиваемая мощность в термисторах значительно меньше, и ее рекомендуется определять экспериментально для каждого термистора.
Тензочувствительные преобразователи (тензорезисторы).
В конструкторской практике часто необходимы измерения механических напряжений и деформаций в элементах конструкций. Наиболее распространенными преобразователями этих величин в электрический сигнал являются тензорезисторы. В основе работы тензорезисторов лежит свойство металлов и полупроводников изменять свое электрическое сопротивление под действием приложенных к ним сил. Простейшим тензорезистором может быть отрезок проволоки, жестко сцепленный с поверхностью деформируемой детали. Растяжение или сжатие детали вызывает пропорциональное растяжение или сжатие проволоки, в результате чего изменяется ее электрическое сопротивление. В пределах упругих деформаций относительное изменение сопротивления проволоки связано с ее относительным удлинением соотношением
R/R = Kтl/l, (16.1)
где l, R начальные длина и сопротивление проволоки; l, R приращение длины и сопротивления; Кт коэффициент тензочувствительности.
Величина коэффициента тензочувствительности зависит от свойств материала, из которого изготовлен тензорезистор, а также от способа крепления тензорезистора к изделию. Для металлических проволок из различных металлов Кт = 1…3.5.
Различают проволочные и полупроводниковые тензорезисторы. Для изготовления проволочных тензорезисторов применяются материалы, имеющие достаточно высокий коэффициент тензочувствительности и малый температурный коэффициент сопротивления. Наиболее употребительным материалом для изготовления проволочных тензорезисторов является константановая проволока диаметром 0.02…0.05 мм.
Конструктивно, проволочные тензорезисторы представляют собой решетку, состоящую из нескольких петель проволоки, наклеенных на тонкую бумажную (или иную) подложку (рис. 16.2). В зависимости от материала подложки, тензорезисторы могут работать при температурах от 40 до +400оС. Существуют конструкции тензорезисторов, прикрепляемых к поверхности деталей с помощью цементов, способные работать при температурах до 800оС.
Основными характеристиками тензорезисторов являются номинальное сопротивление R, база l и коэффициент тензочувствительности Кт.
Промышленностью выпускается широкий ассортимент тензорезисторов с величиной базы от 5 до 30 мм, номинальными сопротивлениями от 50 до 2000 Ом, с коэффициентом тензочувствительности 2 0.2.
Дальнейшим развитием проволочных тензорезисторов являются фольговые и пленочные тензорезисторы, чувствительным элементом которых является решетка из полосок фольги или тончайшая металлическая пленка, наносимые на подложки на лаковой основе.
Тензорезисторы выполняются на основе полупроводниковых материалов. Наиболее сильно тензоэффект выражен у германия, кремния и др. Основным отличием полупроводниковых тензорезисторов от проволочных является большое (до 50%) изменение сопротивления при деформации благодаря большой величине коэффициента тензочувствительности (от 100 до +200).
Измерение сопротивления тензорезисторов производится теми же методами и средствами, что и термометров сопротивления.
Для измерения механического напряжения в элементе конструкции тензорезистор наклеивают на исследуемый элемент в интересующем сечении таким образом, чтобы его продольная ось совпадала с направлением деформации (рис. 16.3).
Если на элемент конструкции действует сила F, то величина возникающего в нем механического напряжения = F/S связана с относительной деформацией =L/L соотношением = Е, где S поперечное сечение элемента; E модуль упругости материала; L длина образца.
Учитывая (16.1), получим
Измерив R тензорезистора, можно по известным R, KT и Е определить напряжение .
Индуктивные преобразователи.
Индуктивные преобразователи применяются для измерения перемещений, размеров, отклонений формы и расположения поверхностей. Преобразователь состоит из неподвижной катушки индуктивности с магнитопроводом и якоря, также являющегося частью магнитопровода, перемещающегося относительно катушки индуктивности. Для получения возможно большей индуктивности магнитопровод катушки и якорь выполняются из ферромагнитных материалов. При перемещении якоря (связанного, например, со щупом измерительного устройства) изменяется индуктивность катушки и, следовательно, изменяется ток, протекающий в обмотке.
На рис. 16.4 приведены схемы индуктивных преобразователей с переменным воздушным зазором (рис. 16.4,а), применяемых для измерения перемещений в пределах
0.01…10 мм; с переменной площадью воздушного зазора S (рис. 16.4,б), применяемых в диапазоне 5…20 мм.
При небольшом зазоре индуктивность катушки преобразователя (рис. 16.4, а)
(16.2)
где w число витков обмотки; RM, R – магнитное сопротивление магнитопровода и зазора; lM средняя длина магнитной силовой линии в магнитопроводе; S, S0 площади сечения магнитопровода и воздушного зазора; , 0 магнитные проницаемости материала магнитопровода и воздушного зазора.
Когда магнитное сопротивление зазора значительно больше магнитного сопротивления магнитопровода, т.е. R >> RM или >> lM/2, выражение (16.2) принимает вид
L =w2S00/2. (16.3)
Индуктивные преобразователи с переменным зазором имеют высокую чувствительность и реагируют на изменение зазора порядка 0.1…0.5 мкм. Ток в обмотке катушки определяется выражением
(16.4)
где U напряжение питания; R активное сопротивление обмотки; – частота питающего напряжения.
Из (16.3), (16.4) следует, что зависимость I = f() нелинейна. Спрямление нелинейности достигается применением дифференциальных преобразователей с двумя раздельными магнитными цепями и общим якорем. Индуктивные преобразователи широко применяют в современных средствах линейных и угловых измерений: профилографах, контрольных автоматах и в электронных аналоговых и цифровых приборах для активного контроля линейных размеров. Приведенная погрешность индуктивных преобразователей не превосходит 1…2%.
PAGE 6
EMBED Visio.Drawing.6
EMBED Visio.Drawing.6
EMBED Visio.Drawing.6
EMBED Visio.Drawing.6
refleader.ru
Параметрический преобразователь – Энциклопедия по машиностроению XXL
Это нестационарный эффект Джозефсона. Эффекты Джозефсона не только подтверждены экспериментально, но и положены в основу чрезвычайно точного метода измерения напряжения. Б настоящее время созданы основанные на этих эффектах параметрические преобразователи частоты, болометры и другие приборы. [c.265]Параметрические преобразователи (параметрические генераторы второго рода) [c.172]
В параметрических преобразователях энергия, отдаваемая в измерительную цепь в виде выходной величины, [c.350]
Таким образом, параметрические преобразователи применяют в датчиках для измерения статических и динамических сил, а генераторные — преимущественно в датчиках для динамических измерений. [c.351]
Чувствительность акселерометра на основе параметрического преобразователя может быть выражена зависимостью [c.27]
Параметрические процессы и параметрические преобразователи [c.300]
Общие замечания. Параметрические преобразователи, как отмечено в разделе 1, управляют параметрами потока энергии, поступающего от внешнего источника, и могут работать в одном из двух режимов. В первом из них преобразователь является регулятором постоянного тока или напряжения. [c.196]
Параметрические генераторы света Параметрические преобразователи в ИК диапазон [c.241]
Метод двухкаскадной генерации разностной частоты позволяет достаточно просто и с высокой эффективностью формировать сверхкороткие ИК импульсы. Изменяя интенсивности взаимодействующих в первом каскаде волн и длину нелинейных кристаллов, можно управлять длительностью импульсов. Предельные возможности схемы, с точки зрения достижения минимальной длительности, определяются полосой пропускания параметрического преобразователя. Так при длине кристалла L=22 мм можно преобразовывать импульсы с длительностью, превышающей 4 пс. Уменьшение длины кристалла приводит к уширению полосы преобразования, но снижает его эффективность. [c.278]
По физической акустике и колебаниям механических систем издано значительное число фундаментальных книг (ряд названий помещен в списке литературы). Поэтому в данной книге нет традиционного раздела, посвященного основам акустики. Это позволило, сохранив разумный объем, более полно осветить теорию и методы получения заданных характеристик электроакустических аппаратов и поместить сведения не только по радиовещательной аппаратуре (микрофонам и громкоговорителям), но и по таким аппаратам, как магнитострикционные излучатели, геофоны, параметрические преобразователи. Такое распределение материала диктовалось желанием сделать книгу полезной для инженеров и научных работников различных отраслей промышленности, занимающихся вопросами разработки и использования электроакустической аппаратуры. [c.6]
При максимальном использовании мощности параметрического преобразователя напряжение, отдаваемое им на нагрузку, пропорционально корню квадратному из мощности ( о о) которая допустима для чувствительного элемента по техническим соображениям. [c.225]
По первому признаку преобразователи разделяют на параметрические и трансформаторные. Параметрический преобразователь [c.129]
К преимуществам электродинамических вибродатчиков следует отнести большой амплитудный диапазон, низкое выходное сопротивление и возможность передачи сигналов по длинной линии связи. Действие большинства параметрических преобразователей основано на изменении комплексных сопротивлений или проводимости электрических цепей. [c.606]
С точки зрения прикладной нелинейной оптики эффект параметрического рассеяния является источником шумов, ограничивающих чувствительность параметрических усилителей и преобразователей частоты света и предельную стабильность параметрических генераторов света. Однако квантовые шумы могут, в принципе, найти полезное применение в метрологии света, стать основой квантовой фотометрии . Параметрический преобразователь частоты является одновременно абсолютным (не требующим калибровки) измерителем яркости света. Кроме того, одновременность и направленность вылета фотонов в парах при параметрическом рассеянии позволяет осуществить эталонный генератор фотонов, излучающий известное число фотонов. [c.10]
Итак, отношение сигнал/шум на выходе параметрического преобразователя частоты независимо от интенсивности накачки и других параметров преобразователя равняется числу фотонов на моду в падающем излучении. Это число, в свою очередь, связано со спектра.чьной яркостью и эффективной температурой падающего излучения соотношениями (1.1.13) и (1.1.26), так что [c.202]
Таким образом, двухкаскадные параметрические преобразователи частоты света на пьезокристаллах позволяют, в принципе, наблюдать тройные совпадения фотонов. При этом не обязательно добиваться выполнения двойного синхронизма в одном кристалле, можно использовать два последовательно расположенных кристалла. [c.231]
При соз > С02 имеется усиление по мощности при преобразовании фотонов низкой частоты в фотоны более высокой частоты. Расстояние, на котором достигается максимальное усиление, обратно пропорционально амплитуде накачки на частоте соь Этот случай обычно встречается в параметрических преобразователях. [c.312]
Волна с частотой (Oi содержит очень большое число квантов и может рассматриваться как накачка в параметрическом преобразователе (преобразование осуществляется либо вверх от (О к из, либо вниз от ч>з к Ио). При г = О имеем Пз О, = 100 П2. [c.313]
Параметрические преобразователи, основанные на измерении сопротивления, емкости или индуктивности, могут быть выполнены од шарными или дифференциальными, т. е. сдвоенными, с изменением параметров в каждом из них в разных направлениях. Последнее позволяет полностью или частично устранить искажающее влияние внешних факторов на измеряемый параметр. [c.144]
При изучении одноконтурных параметрических генераторов мы не рассматривали конкретный механизм изменения реактивного параметра во времени, а задавались математическим законом модуляции параметра, например, в виде С t)— jilт os 2uit). Такие системы принято называть параметрическими генераторами первого рода, в отличие от параметрических генераторов второго рода параметрических преобразователей), в которых изменение нелинейного реактивного параметра происходит в результате действия некоторой периодической силы, включенной в колебательную систему. [c.172]
В колебательных системах с г-араметрическим воздействием возможно появление комбинационных явлений. В параметрических преобразователях, в которых преобразование частоты производится с помощью напряжения накачки с использованием нелинейных эле.ментов, может возникнуть целый ряд комбинационны [c.183]
Чувствительности измерительной системы к различным кинематическим величинам по перемещению б и скорости V приведены в связи с тем, что используемые в датчиках инерционного действия физические преобразователи реагируют на относительное перемещение б или относительную скорость 1 (см. гл. VIII, IX), На рис. 7 приведены схемы датчиков инерционного действия с параметрическими и генераторным механоэлектрическими преобразователями. В параметрических преобразователях изменения индуктивности L, емкости С и сопротивления г пропорциональны относительному перемещению 5 инерционного элемента. В генераторном электродинамическом преобразователе генерируемое напряжение е пропорционально скорости катушки, укрепленной на инерционном элементе, относительно магнита, прикрепленного к корпусу датчика (е пропорционально относительной скорости V). [c.144]
Генераторные МЭП создают ток на выходе, если в преобразователе производится работа поэтому они принципиально непригодны для измерения неизменяю-щихся во времени величин. В генераторных МЭП механическая величина непосредственно порождает электрическую в форме заряда, тока или напряжения. В параметрических преобразователях выходиой сигнал образуется более сложным образом. Входная величина прямо или косвенно влияет на какое-либо электрическое свойство преобразователя, регулирующее потребление энергии от внешнего источника. Измерительная информация содержится в законе модуляции электрической величины. На рис. 1 представлены естественные входные и выходные величины и промежуточные параметры МЭП. Символы механических величин на схеме следует относить как к поступательному, так и к вращательному движению. В генераторных Л5ЭП естественная входная величина сразу преобразуется в выходную электри ческую, причем обозначение последней не содержит знака приращения. [c.183]
В настоящее время не существует строгого и последовательного учета всех особенностей ФМР. Однако отдельные аспекты резонансных явлений в ферромагнитных материалах широко пременяются в технике. Например, развитие представлений о линейных и нелинейных. эффектах при ФМР дало основу для создания новых СВЧ устройств вентилей, ферритных генераторов и усилителен, параметрических преобразователей и ограничителей мощности. [c.182]
В монографии описан новый класс приборов — нелинейно-оптических (параметрических) преобразователей (ап-конверторов) инфракрасного излучения в видимый, диапазон. Построены приближение геометрической оптики и дифракционная теория, проанализирована эффективность (светосила) преобразователей, шумовые характеристики и пороговая чувствительность нелинейно-оптических систем регистрации инфракрасного излучения. Теоретические параметры преобразователей сравниваются с экспериментальными даппыми. [c.2]
Интеграл по So в (3.6) по форме совпадает с интегралом Френеля — Кирхгофа для преломляющей поверхности Sq. Поэтому формулы (3.6), (3.7) подтверждают, что параметрический преобразователь в схеме касательного синхронизма эквивалентен, сферической преломляющей поверхности с радиусом i Zp и показателем преломления n = ksjku (2.16), расположенной в центре кристалла, с апертурной диафрагмой (3.7), зависящей от положения ИК-источника. [c.63]
Петникова В. М. Исследование шумов и разрешающей способности параметрических преобразователей оптического диапазона Дис.. .. канд. физ.-мат. наук 01.04.04.— М., 1975. [c.163]
Эти работы намечают некоторые возможности практического применения нелинейных явлений. Трудности, с которыми, по-видимому, можно встретиться при осуществлении такого рода нараметрических излучателей и приемников, заключаются в том, что при малой интенсивности взаимодействующих волн эффективность параметрического преобразователя чрезвычайно мала. Казалось бы, можно увеличить эффективность путем увеличения интенсивности этих волн. Однако повышение интенсивности приводит в отсутствие дисперсии, как это видно из результатов, приведенных в данном параграфе, к резкому увеличению затухания взаимодействующих волн, и в конечном счете не позволяет увеличить эффективность преобразования. [c.122]
Влияние мешающего фактора можно уменьшить за счет использования комплексного (двухпараметрового) сигнала, включив ВТП в резонансный контур. Подбирая емкость конденсатора и сопротивление резистора, подключаемых последовательно или параллельно обмотке ВТП, можно добиться ослабления влияния мешающего фактора. На рис. 46, а показаны котлексные плоскости сопротивления параметрического преобразователя 2 и тока I в его обмотке. Стандартный образец характеризуется точкой Л. Если точку компенсации К поместить на пересечении нормали в точке А к линии влияния рп и оси ординат, то ири изменении Рп вектор тока / в цепи, состоящей из последовательно соединенных ВТП, конденсатора С и резистора Дд (рис. 46, б), описывает дугу окружности, если линия влияния Рп — прямая. В то же время годограф вектора тока I при изменении Рк — линия АС. Изменения модуля вектора /, а следовательно, и модуля вектора /вых (рис. 46, б) прп малых изменениях рп невелики. Если же точка компенсации занимает положение К [в центре дуги I (ри)]. то при изменении рк /вых = — I и ыи не изменяется. Выбранное иоложеяие точки К обеспечивается [c.129]
Пьезоэлектрические преобразователи применяют для измерения параметров абсолютных колебаний нев-ращающихся частей механизмов. Пьезоэлектрические преобразователи обладают высокими метрологическими параметрами, широким амплитудным и частотным диапазоном, простотой конструкций, высокой надежностью и сравнительно низкой стоимостью. Основными недостатками пьезоэлектрических преобразователей являются высокое выходное сопротивление и низкая помехозащищенность. В значительно меньшей степени эти недостатки свойственны пьезоэлектрическим преобразователям, относящимся к классу параметрических преобразователей. [c.605]
mash-xxl.info
Параметрический преобразователь – Большая Энциклопедия Нефти и Газа, статья, страница 1
Параметрический преобразователь
Cтраница 1
Параметрические преобразователи требуют наличия вспомогательного источника электрической энергии. [1]
Параметрический преобразователь применяется, как правило, в диапазонах свч, на которых используются резонаторы ( коаксиальные или объемные) с чрезвычайно высокими конструктивными доб-ротностями. [2]
Параметрические преобразователи весьма разнообразны по своему устройству, назначению и областям применения. Ниже приводится описание устройства и основы теории параметрических преобразователей, получивших наибольшее практическое применение. [3]
Параметрические преобразователи, как отмечено в разделе 1, управляют параметрами потока энергии, поступающего от внешнего источника, и могут работать в одном из двух режимов. В первом из них преобразователь является регулятором постоянного тока или напряжения. [4]
Емкостные параметрические преобразователи позволяют измерять очень малые перемещения – примерно 10 – – мм. [5]
Пневматические параметрические преобразователи снабжены унифицированными пневмосиловыми преобразователями и работают с любыми пневматическими вторичными приборами, регулирующими блоками и другими устройствами пневмоавтоматики. [7]
Токовые параметрические преобразователи ГСП для измерения технологических параметров имеют те же пределы измерений, что и пневматические ( стр. В обозначении токового преобразователя ставится индекс Э вместо индекса П у преобразователя с пневмовыходом. [9]
Индуктивные и емкостные параметрические преобразователи служат для измерения силы, давления, линейного или углового перемещения детали. [10]
Рассмотрим параметрический преобразователь, на вход которого подается преобразуемая неэлектрическая величина, а выходные зажимы подключены к вспомогательному источнику энергии Е с внутренним сопротивлением ZE. Следует отметить, что обратные превращения энергии в параметрических преобразователях незначительны и обусловливают нежелательные явления, вызывающие пьезоэлектрические, термоэлектрические и другие эффекты, являющиеся источниками погрешностей. [11]
Повышающий параметрический преобразователь представляет собой абсолютно устойчивое устройство. У него отсутствует склонность к самовозбуждению. Следствием этого является высокая стабильность его параметров и относительно слабая зависимость полосы пропускания от коэффициента усиления. Эти несомненные достоинства подобных систем обусловлены нерегенеративным характером усиления. [12]
Для параметрических преобразователей источник электрической энергии является необходимым элементом измерительной цепи, требования к которому определяются свойствами и характером использования как самих преобразователей, так и прибора в целом. [13]
К параметрическим преобразователям относятся такие, которые для своей работы требуют посторонний источник питания. [14]
В параметрических преобразователях измеряемая величина вызывает изменение одного из параметров элемента электрической цепи: сопротивления, индуктивности и емкости. [15]
Страницы: 1 2 3 4
www.ngpedia.ru
Параметрические преобразователи
⇐ ПредыдущаяСтр 22 из 26Следующая ⇒
В параметрических преобразователях выходной величиной является параметр электрической цепи (R, L, М, С). При использовании параметрических преобразователей необходим дополнительный источник питания. Параметрические преобразователи весьма разнообразны по своему устройству, назначению и областям применения. Ниже приводятся описание устройства и основы теории параметрических преобразователей, получивших наибольшее практическое распространение.
Реостатные преобразователи
 |
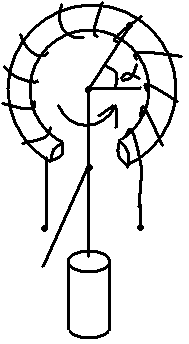
| Рис. 4.1.2 Реостатные преобразователи для угловых (а), линейных (б) перемещений и для функционального преобразования линейных перемещений (в) |
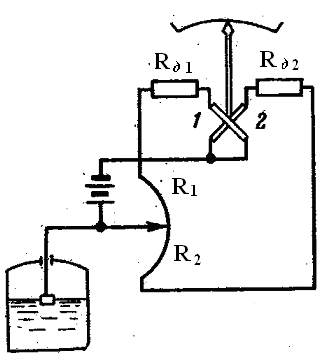
| Рис. 4.1.3 Схема уровнеметра |
Реостатные преобразователи основаны на изменении электрического сопротивления проводника под влиянием входной величины – перемещения. Реостатный преобразователь, как показывает само название, представляет собой в простейшем случае реостат, щетка (движок) которого перемещается под воздействием измеряемой неэлектрической величины. На рис. 4.1.2 схематически показаны некоторые варианты конструкций реостатных преобразователей для углового (рис. 4.1.2,а) и линейного (рис. 4.1.2,б и в) перемещений. Преобразователь состоит из обмотки, нанесенной на каркас, и щетки. Форма каркаса зависит от характера измеряемого перемещения (линейное, угловое), от вида функции преобразования (линейная, нелинейная) и других факторов и может иметь вид цилиндра, тора, призмы и т.д. Для изготовления каркасов применяются диэлектрики (гетинакс, пластмасса, керамика) и металлы (дюралюминий с анодированной поверхностью). Проволока для обмотки выполняется из сплавов (сплав платины с иридием, константан, нихром и фехраль). Для обмотки преобразователя обычно используется изолированный эмалью или оксидной пленкой провод. После изготовления обмотки изоляция провода счищается в местах соприкосновения его с щеткой. Щетка преобразователя выполняется либо из проволок, либо из плоских пружинящих полосок, причем используются как чистые металлы (платина, серебро), так и сплавы (платина с иридием, фосфористая бронза, медно-серебряные сплавы и т.д.). Качество контакта щетки и обмотки определяется контактным давлением, которое выбирается в широких пределах от десятых долей грамма до сотен граммов в зависимости от материалов контакта и обмотки и условий работы преобразователя. Габариты преобразователя определяются значением измеряемого перемещения, сопротивления обмотки и мощностью, выделяемой в обмотке. Для получения нелинейной функции преобразования применяются функциональные реостатные преобразователи. Нужный характер функции преобразования очень часто достигается профилированием каркаса преобразователя (рис. 4.1.2,в). В рассматриваемых реостатных преобразователях зависимость изменения сопротивления от перемещения щетки имеет ступенчатый характер, так как сопротивление изменяется скачками на значение сопротивления одного витка. Это вызывает погрешность преобразования. Максимальная приведенная погрешность при этом g = DR/R, где DR – максимальное сопротивление одного витка; R – полное сопротивление преобразователя. Иногда применяются реохордные преобразователи, в которых щетка скользит вдоль ось проволоки. В этих преобразователях отсутствует указанная погрешность.
Выходной параметр реостатных преобразователей – сопротивление – измеряется обычно с помощью мостовой схемы.
К достоинствам преобразователей относится возможность получения высокой точности, значительных по уровню выходных сигналов и относительная простота конструкции. Недостатки – наличие скользящего контакта, необходимость относительно больших перемещений движка, а иногда и значительного усилия для его перемещения.
Применяются реостатные преобразователи для преобразования сравнительно больших перемещений (угловых, линейных) и других электрических величин (усилия, давления и т.д.), которые могут быть преобразованы в перемещение.
 |
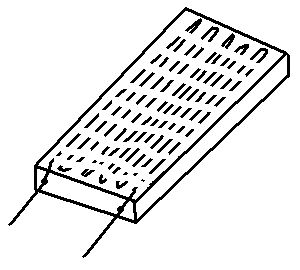
| Рис. 4.1.4 Преобразователи с угольными шайбами |
 |
| Рис. 4.1.5 Тензочувствительный проволочный преобразователь |
Пример применения реостатного преобразователя для измерения уровня или объема жидкости показан на рис. 4.1.3. Изменение положения поплавка, определяемого уровнем или объемом жидкости, вызывает изменение сопротивления резисторов R1 и R2, включенных последовательно с катушками 1 и 2 логометра. В результате изменяются отношение токов в катушках и показание прибора. Шкала прибора градуируется в значениях измеряемой величины объема или уровня жидкости.
Рекомендуемые страницы:
lektsia.com
