
Средства программирования PIC-контроллеров / Хабр
Введение
PIC-контроллеры остаются популярными в тех случаях, когда требуется создать недорогую компактную систему с низким энергопотреблением, не предъявляющую высоких требований по ее управлению. Эти контроллеры позволяют заменить аппаратную логику гибкими программными средствами, которые взаимодействуют с внешними устройствами через хорошие порты.
Миниатюрные PIC контроллеры хороши для построения преобразователей интерфейсов последовательной передачи данных, для реализации функций «прием – обработка – передача данных» и несложных регуляторов систем автоматического управления.
Компания Microchip распространяет MPLAB — бесплатную интегрированную среду редактирования и отладки программ, которая записывает бинарные файлы в микроконтроллеры PIC через программаторы.
Взаимодействие MPLAB и Matlab/Simulink позволяет разрабатывать программы для PIC-контроллеров в среде Simulink — графического моделирования и анализа динамических систем.
• Характеристики миниатюрного PIC контроллера PIC12F629
• Интегрированная среда разработки MPLAB IDE
• Подключение Matlab/Simulink к MPLAB
• Подключение программатора PIC-KIT3
Характеристики миниатюрного PIC-контроллера
Семейство РIС12ххх содержит контроллеры в миниатюрном 8–выводном корпусе со встроенным тактовым генератором. Контроллеры имеют RISC–архитектуру и обеспечивают выполнение большинства команд процессора за один машинный цикл.
Для примера, ниже даны характеристики недорогого компактного 8-разрядного контроллера PIC12F629 с многофункциональными портами, малым потреблением и широким диапазоном питания [1].
• Архитектура: RISC
• Напряжение питания VDD: от 2,0В до 5,5В (< 6,5В)
• Потребление:
— <1,0 мА @ 5,5В, 4МГц
— 20 мкА (тип) @ 32 кГц, 2,0В
— <1,0 мкА (тип) в режиме SLEEP@2,0В
• Рассеиваемая мощность: 0,8Вт
• Многофункциональные каналы ввода/вывода: 6/5
• Максимальный выходной ток портов GPIO: 125мА
• Ток через программируемые внутренние подтягивающие резисторы портов: ≥50 (250) ≤400 мкА @ 5,0В
• Разрядность контроллера: 8
• Тактовая частота от внешнего генератора: 20 МГц
Длительность машинного цикла: 200 нс
• Тактовая частота от внутреннего RC генератора: 4 МГц ±1%
Длительность машинного цикла: 1мкс
• FLASH память программ: 1К
Число циклов стирание/запись: ≥1000
• ОЗУ память данных: 64
• EEPROM память данных: 128
Число циклов стирание/запись: ≥10K (-40оС ≤TA≤ +125 оС)
• Аппаратные регистры специального назначения: 16
• Список команд: 35 инструкций, все команды выполняются за один машинный цикл,кроме команд перехода, выполняемых за 2 цикла
• Аппаратный стек: 8 уровней
• Таймер/счетчик ТМR0: 8-разрядный с предделителем
• Таймер/счетчик ТМR1: 16-разрядный с предделителем
Дополнительные особенности:
• Сброс по включению питания (POR)
• Таймер сброса (PWRTтаймер ожидания запуска генератора (OST
• Сброс по снижению напряжения питания (BOD)
• Сторожевой таймер WDT
• Мультиплексируемый вывод -MCLR
• Система прерываний по изменению уровня сигнала на входах
• Индивидуально программируемые для каждого входа подтягивающие резисторы
• Программируемая защита входа
• Режим пониженного энергопотребления SLEEP
• Выбор режима работы тактового генератора
• Внутрисхемное программирование ICSP с использованием двух выводов
• Четыре пользовательские ID ячейки
Предельная рабочая температура для Е исполнения (расширенный диапазон) от -40оС до +125 оС;
Температура хранения от -65оС до +150 оС.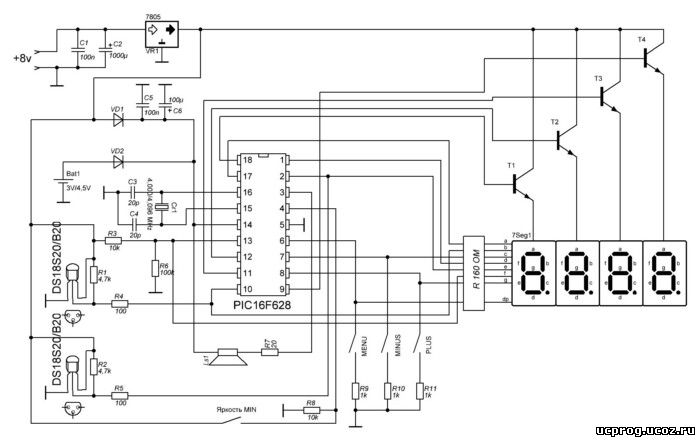
КМОП технология контроллера обеспечивает полностью статический режим работы, при котором остановка тактового генератора не приводит к потере логических состояний внутренних узлов.
Микроконтроллер PIC12F629 имеет 6-разрядный порт ввода/вывода GPIO. Один вывод GP3 порта GPIO работает только на вход, остальные выводы можно сконфигурировать для работы как на вход так и на выход. Каждый вывод GPIO имеет индивидуальный бит разрешения прерываний по изменению уровня сигнала на входах и бит включения внутреннего подтягивающего резистора.
Интегрированная среда разработки MPLAB IDE
MPLAB IDE — бесплатная интегрированная среда разработки ПО для микроконтроллеров PIC включает средства для создания, редактирования, отладки, трансляции и компоновки программ, записи машинного кода в микроконтроллеры через программаторы.
Загрузка MPLAB IDE
Бесплатные версии MPLAB (включая MPLAB 8.92) хранятся на сайте компании Microchip в разделе «DOWNLOAD ARCHIVE».
Создание проекта
Пример создания проекта программ PIC контроллера в среде MPLAB включает следующие шаги [2].
1. Вызов менеджера проекта.
2. Выбор типа PIC микроконтроллера.
3. Выбор компилятора, например, Microchip MPASM для ассемблера.
4. Выбор пути к каталогу проекта (клавиша Browse…) и ввод имени проекта.
5. Подключение файлов к проекту в окне Project Wizard → Step Four можно не выполнять. Это можно сделать позднее, внутри активного проекта. Клавиша Next открывает следующее окно.
6. Завершение создания проекта (клавиша Finish).
В результате создания проекта FirstPrMPLAB интерфейс MPLAB принимает вид, показанный на Рис. 1.
Рис. 1. Интерфейс среды MPLAB v8.92 и шаблон проекта.
Создание файла программы
Программу можно создать при помощи любого текстового редактора. В MPLAB имеется встроенный редактор, который обеспечивает ряд преимуществ, например, оперативный лексический анализ исходного текста, в результате которого в тексте цветом выделяются зарезервированные слова, константы, комментарии, имена, определенные пользователем.
В MPLAB имеется встроенный редактор, который обеспечивает ряд преимуществ, например, оперативный лексический анализ исходного текста, в результате которого в тексте цветом выделяются зарезервированные слова, константы, комментарии, имена, определенные пользователем.
Создание программы в MPLAB можно выполнить в следующей последовательности.
1. Открыть редактор программ: меню → File → New. Изначально программе присвоено имя Untitled.
2. Набрать или скопировать программу, например, на ассемблере.
3. Сохранить программу под другим именем (меню → File → Save As), например, FirstPrMPLAB.asm.
Рис. 2. Пример простейшей программы (на ассемблере) вывода сигналов через порты контроллера GP0, GP1, GP2, GP4, GP5 на максимальной частоте.
Запись ‘1’ в разряде регистра TRISIO переводит соответствующий выходной буфер в 3-е состояние, в этом случае порт GP может работать только на вход. Установка нуля в TRISIO настраивает работу порта GP на выход.
Примечание. По спецификации PIC12F629 порт GP3 микроконтроллера работает только на вход (соответствующий бит регистра TRISIO не сбрасывается – всегда находится в ‘1’).
Регистры TRISIO и GPIO находятся в разных банках области памяти. Переключение банков выполняется 5-м битом регистра STATUS.
Любая программа на ассемблере начинается директивой org и заканчивается директивой end. Переход goto Metka обеспечивает циклическое выполнение программы.
В программе (Рис. 2) используются следующие обозначения.
Директива LIST — назначение типа контроллера
Директива __CONFIG — установка значений битов конфигурации контроллера
Директива equ — присвоение числового значения
Директива org 0 — начало выполнения программы с адреса 0
Команда bsf — устанавливает бит указанного регистра в 1
Команда bсf — сбрасывает бит указанного регистра в 0
Команда movlw — записывает константу в регистр W
Команда movwf — копирует содержимое регистра W в указанный регистр
Команда goto — обеспечивает переход без условия на строку с меткой
Директива end — конец программы
Установка требуемой конфигурации микроконтроллера
Конфигурация микроконтроллера PIC12F629 зависит от настроек слова конфигурации (2007h), которые можно задать в программе через директиву __CONFIG.
Непосредственно или через окно MPLAB: меню → Configure → Configuration Bits:
Где:
Бит 2-0 — FOSC2:FOSC0. Выбор тактового генератора
111 — Внешний RC генератор. Подключается к выводу GP5. GP4 работает как CLKOUT
110 — Внешний RC генератор. Подключается к выводу GP5. GP4 работает как ввод/вывод
101 — Внутренний RC генератор 4МГц. GP5 работает как ввод/вывод. GP4 — как CLKOUT
100 — Внутренний RC генератор 4МГц. GP5 и GP4 работают как ввод/вывод
011 — EC генератор. GP4 работает как ввод/вывод. GP5 — как CLKIN
010 — HC генератор. Резонатор подключается к GP4 и GP5
001 — XT генератор. Резонатор подключается к GP4 и GP5
000 — LP генератор. Резонатор подключается к GP4 и GP5 Бит 3 — WDTE: настройка сторожевого таймера (Watchdog Timer)
1 — WDTE включен
0 — WDTE выключенСторожевой таймер предохраняет микроконтроллер от зависания – перезапускает программу через определенный интервал времени если таймер не был сброшен.
Период таймера устанавливается в регистре OPTION_REG. Обнуление сторожевого таймера вызывается командой CLRWDT.
Бит 4 — PWRTE: Разрешение работы таймера включения питания:
1 — PWRT выключен
0 — PWRT включенТаймер задерживает микроконтроллер в состоянии сброса при подаче питания VDD.
Бит 5 — MCLR: Выбор режима работы вывода GP3/-MCLR
1 — работает как -MCLR
0 — работает как порт ввода-вывода GP3Бит 6 — BODEN: Разрешение сброса по снижению напряжения питания (как правило < 2.0В)
1 — разрешен сброс BOR0 — запрещен сброс BOR автоматически включается таймер При разрешении сброса BOR автоматически включается таймер PWRT
Бит 7 — .CP: Бит защиты памяти программ от чтения программатором
1 Защита выключена
0 Защита включенаПри выключения защиты вся память программ стирается
Бит 8 — .CPD: Бит защиты EPROM памяти данных
1 Защита выключена
0 Защита включенаПосле выключения защиты вся информация будет стерта
Бит 11-9 — Не используются: Читается как ‘1’.
Бит 13-12 — BG1:BG0. Биты калибровки сброса по снижению питания
00 — нижний предел калибровки
11 — верхний предел калибровки

Добавление программы к проекту
Пример добавления программы к проекту показан на (Рис. 3).
Рис. 3. Добавление программы FirstPrMPLAB.asm к проекту FirstPrMPLAB.mcp
Сохранить материалы проекта можно командой: меню → File → Save Workspace.
Компиляция
Чтобы создать бинарный файл с расширением hex для прошивки микроконтроллера необходимо откомпилировать проект. Запуск компиляции выполняется командой меню → Project → Build All. Результаты компиляции можно увидеть в окне Output (Рис. 1). Если в программе нет ошибок, то компилятор выдаёт сообщение об успешной компиляции: BUILD SUCCEEDED, загрузочный HEX файл можно найти в рабочем каталоге:
Отладка программы
Отладку программы в среде MPLAB IDE можно выполнить при помощи аппаратного эмулятора MPLAB REAL ICE или программного симулятора MPLAB SIM. Запуск последнего выполняется как показано на Рис. 4.
Запуск последнего выполняется как показано на Рис. 4.
Рис. 4. Подключение к симулятору MPLAB SIM для отладки программы.
После запуска отладчика в окне Output (Рис. 1) появляется закладка MPLAB SIM, куда MPLAB выводит текущую информацию отладчика. Команды отладчика (Рис. 5) после запуска становятся активными.
Рис. 5. Команды отладчика.
Команды отладчика:
• Run — Непрерывное выполнение программы до точки останова (Breakpoint) если таковая установлена.
• Halt — Остановка программы на текущем шаге выполнения.
• Animate — Анимация непрерывного выполнения программы.
• Step Into — Выполнение по шагам (вызовы Call выполняются за один шаг).
• Step Over — Выполнение по шагам включая команды вызовов Call.
• Reset — Начальная установка программы. Переход указателя на первую команду.
• Breakpoints — Отображение списка точек останова. Обработка списка.
Обработка списка.
При выполнении программы по шагам текущий шаг выделяется стрелкой (Рис. 6). Непрерывное выполнение программы останавливается командой Halt или достижением программой точки останова. Точка останова устанавливается/снимается в строке программы двойным щелчком.
Пример программы на ассемблере, которая с максимальной скоростью меняет состояние портов контроллера показан на Рис. 6 (справа). Программа передаёт в регистр портов GPIO данные b’10101010’ и b’01010101’. Поскольку в регистре GPIO передачу данных в порты контроллера выполняют не все разряды, а только 0,1,2,4 и 5, то состояние регистра GPIO (Рис. 6, слева) отличается значениями: b’00100010’ и b’00010101’.
Рис. 6. Состояние регистров специального назначения контроллера на момент выполнения программы (слева) и выполняемая по шагам программа (справа).
В процессе отладки можно наблюдать за состоянием регистров, переменных, памяти в соответствующих окнах, открываемых в разделе View основного меню. В процессе отладки можно вносить изменения в код программы, содержимое регистров, памяти, изменять значения переменных. После изменения кода необходимо перекомпилировать программу. Изменение содержимого регистров, памяти и значения переменных (окна раздела View: Special Function Register, File Register, EEPROM, Watch) не требует перекомпиляции.
В процессе отладки можно вносить изменения в код программы, содержимое регистров, памяти, изменять значения переменных. После изменения кода необходимо перекомпилировать программу. Изменение содержимого регистров, памяти и значения переменных (окна раздела View: Special Function Register, File Register, EEPROM, Watch) не требует перекомпиляции.
Входные сигналы портов модели микроконтоллера можно задать в разделе Debugger → Stimulus. Устанавливаемые состояния сигналов портов привязываются к времени (тактам) отладки.
Иногда результаты выполнения программы в режиме отладки не соответствуют выполнению этой же программы в реальном контроллере, так, например, отладчик программы (Рис. 6) без инструкций movlw 0x07 и movwf cmcon показывает, что выходы GP0 и GP1 регистра GPIO не изменяются — находятся в нулевом состоянии, содержимое регистра GPIO попеременно равно 0x14 и 0х20. Однако, контроллер, выполняющий программу без указанных инструкций, показывает на осциллографе циклическую работу всех пяти выходов: 0x15 и 0х22, включая GP0 и GP1 (см. Рис. 7).
Рис. 7).
Осциллограммы контроллера, выполняющего циклы программы Рис. 6 (Metka… goto Metka) показаны на Рис. 7.
Рис. 7. Осциллограммы выхода GP0 (слева) и GP1 (справа) микроконтроллера PIC12F629, работающего от внутреннего 4МГц RC генератора. Программа (Рис. 6) формирует сигналы максимальной частоты на всех выходах контроллера. За период сигналов 5.3 мкс выполняется 5 команд (6 машинных циклов), амплитуда GP0 сигнала на осциллограмме равна 4.6В, измеренное программатором питание контроллера 4.75В.
Прошивка микроконтроллера
Для записи программы в микроконтроллер (прошивки контроллера) необходимо микроконтроллер подключить к интегрированной среде MPLAB IDE через программатор. Организация подключения показана ниже в разделе «Подключение программатора PIC-KIT3».
Примечание. В контроллер PIC12F629 записана заводская калибровочная константа настройки частоты внутреннего тактового генератора. При необходимости её можно прочитать и восстановить средствами MPLAB с использованием программатора.
Команды для работы с программатором и изменения его настроек находятся в меню MPLAB Programmer. Тип программатора в MPLAB выбирается в разделе: меню → Programmer → Select Programmer.
Рис. 8. Выбор программатора для подключения к среде MPLAB.
Прошивка микроконтроллера через программатор запускается командой: меню → Programmer → Program. Сообщение об успешной прошивке показано на Рис. 9.
Рис. 9. Запуск прошивки микроконтроллера и вид сообщения об успешной прошивке.
Примечание: Во время прошивки микроконтроллера у программатора PIC-KIT3 мигает желтый светодиод.
Подключение MATLAB/SIMULINK к MPLAB
В системе моделирования динамических систем Simulink (приложение к Matlab) на языке графического программирования [7] можно разрабатывать программы для семейства PIC контроллеров имеющих АЦП/ЦАП, счетчики, таймеры, ШИМ, DMA, интерфейсы UART, SPI, CAN, I2C и др.
Пример Simulink программы PIC контроллера показан на Рис. 10.
Рис. 10. Пример программы на языке графического программирования для PIC контроллера выполненной в среде моделирования динамических систем Simulink.
Взаимодействие средств разработки и компиляции программ для PIC контроллеров в Simulink показано на Рис. 11 [6].
Рис. 11. Структура средств построения адекватной модели PIC контроллера на языке графического программирования.
Для построения среды разработки необходимы следующие компоненты Matlab:
• Simulink
• Real-Time Workshop Embedded Coder
• Real-Time Workshop
И Cи компилятор компании Microchip:
• C30 для контроллеров PIC24, dsPIC30 и PIC33
• или C32 для контроллеров серии PIC32
Установка компонентов Matlab
На сайте имеются Simulink библиотеки (dsPIC Toolbox) для PIC контроллеров и версий Matlab c R2006a по R2012a:
Для скачивания библиотеки необходимо зарегистрироваться. Программы поддерживают работу 100 микроконтроллеров из серий PIC 16MC, 24F, 30F, 32MC, 33F, 56GP, 64MC, 128MC, 128GP.
Программы поддерживают работу 100 микроконтроллеров из серий PIC 16MC, 24F, 30F, 32MC, 33F, 56GP, 64MC, 128MC, 128GP.
Бесплатные версии работают с Simulink моделями PIC контроллеров имеющих до 7 портов ввода-вывода.
Для установки dsPIC Toolbox — библиотеки блоков PIC контроллеров для Matlab/Simulink необходимо [4]:
• Скачать dsPIC Toolbox для требуемой версии Matlab.
• Распаковать zip файл в папке, в которой будут установлены Simulink блоки.
• Запустить Matlab.
• Настроить текущий каталог Matlab на папку с распакованным файлом.
• Открыть и запустить файл install_dsPIC_R2012a.m, например, кнопкой меню или клавишей клавиатуры.
Библиотеки dsPIC и примеры Simulink моделей устанавливаются в текущую папку Matlab (Рис. 12). Установленные блоки для моделирования PIC контроллеров доступны в разделе Embedded Target for Microchip dsPIC библиотеки Simulink (Рис. 13).
Рис. 12. Содержимое текущего каталога после выполнения install_dsPIC_R2012a. m.
m.
Рис. 13. Блоки, установленной библиотеки «Embedded Target for Microchip dsPIC».
Для совместной компиляции Simulink модели средствами Matlab и MPLAB необходимо прописать в переменной окружения path Matlab с высшим приоритетом путь к каталогу MPLAB с файлами MplabOpenModel.m, MplabGetBuildinfo.m и getHardwareConfigs.m:
>> path('c:\Program Files (x86)\Microchip\MPLAB IDE\Tools\MATLAB\',path) Установка Си компилятора MPLAB
Компиляторы MPLAB находятся на сайте Microchip (Download Archive → MPLAB C Compiler for PIC24 and dsPIC DSCs). Для установки демонстрационной версии компилятора С30 необходимо его скачать по ссылке PIC24/dsPIC v3.25 (Рис. 14) и запустить принятый файл mplabc30-v3.25-comboUpgrade.exe.
Рис. 14. Версии Си компилятора (слева) и режимы его установки (справа).
Примечание. Работа выполнена с версией v3. 25 компилятора С30 для PIC24/dsPIC. Проверка показала, что следующая версия v3.30 не поддерживает совместную компиляцию моделей Matlab R2012a (dsPIC Toolbox) без ошибок.
25 компилятора С30 для PIC24/dsPIC. Проверка показала, что следующая версия v3.30 не поддерживает совместную компиляцию моделей Matlab R2012a (dsPIC Toolbox) без ошибок.
Установочный exe файл создаёт в разделе c:\Program Files (x86)\Microchip\ новый каталог mplabc30 с файлами:
Рис. 15. Каталоги компилятора C30 MPLAB.
Последовательность Simulink программирования для PIC контроллеров
1. Создайте рабочий каталог и скопируйте в него *.mdl примеры из раздела example (см. Рис. 12).
2. Загрузите Matlab. Настройте его на рабочий каталог.
3. Включите в переменную окружения path Matlab с высшим приоритетом путь к MPLAB — каталогу c:\Program Files (x86)\Microchip\MPLAB IDE\Tools\MATLAB\:
>> path('c:\Program Files (x86)\Microchip\MPLAB IDE\Tools\MATLAB\',path)
Примечание: Использование команды >>path без аргументов приводит к отображению списка путей переменной path в окне команд (Command Window). Удалить путь из переменной path можно командой rmpath, например:
Удалить путь из переменной path можно командой rmpath, например:
>>rmpath(' c:\Program Files\Microchip\MPLAB IDE\Tools\MATLAB\')4. Создайте Simulink модель для PIC контроллера, используя блоки библиотеки «Embedded Target for Microchip dsPIC» (Рис. 13), или загрузите готовую модель, например, Servo_ADC.mdl.
Тип контроллера, для которого разрабатывается Simulink модель, выбирается из списка в блоке Master > PIC (Рис. 16, Рис. 10), который должен быть включен в состав модели.
Рис. 16. Выбор типа контроллера в блоке Master модели.
5. Проверьте настройки конфигурации модели: Меню → Simulation → Configuration Parameters <Ctrl+E>. В строке ввода System target file раздела Code Generation должен быть указан компилятор S-функций dspic.tlc (Рис. 17). Выбор dspic.tlc настраивает все остальные параметры конфигурации модели, включая шаг и метод интегрирования.
Рис. 17. Выбор компилятора S-функций dspic.tlc для моделей PIC-контроллеров в разделе «основное меню → Simulation → Configuration Parameters → Code Generation».
6. Откомпилируйте модель tmp_Servo_ADC.mdl. Запуск компилятора показан на Рис. 18.
Рис. 18. Запуск компилятора Simulink модели.
В результате успешной компиляции (сообщение: ### Successful completion of build procedure for model: Servo_ADC) в текущем каталоге создаются HEX файл для прошивки PIC контроллера и MCP проект среды MPLAB (Рис. 19).
Рис. 19. Результаты компиляции модели.
Запуск модели в Matlab/Simulink выполняется в окне модели кнопкой, условное время моделирования устанавливается в строке:
Управление компиляцией Simulink моделей из среды MPLAB
Управление компиляцией Simulink модели можно выполнять командами раздела Matlab/Simulink среды MPLAB, например, в следующем порядке.
1. Разработайте модель PIC контроллера в Matlab/Simulink. Сохраните модель.
2. Запустите MPLAB.
3. Выберите MPLAB меню → Tools → Matlab/Simulink и новый раздел появится в составе меню.
4. В разделе Matlab/Simulink откройте Simulink модель, например, Servo_ADC, командой «Matlab/Simulink → Specify Simulink Model Name → Open → File name → Servo_ADC.mdl → Open». Команда Open запускает Matlab и открывает модель.
5. Откомпилируйте модель и создайте MCP проект командами Generate Codes или Generate Codes and Import Files. Перевод MDL модели в MCP проект выполняется TLC компилятором Matlab.
В результате создаётся проект MPLAB:
со скриптами модели на языке Си.
6. Откройте проект: меню → Project → Open → Servo_ADC.mcp (Рис. 20).
Рис. 20. Структура MCP проекта Simulink модели Servo_ADC.mdl в среде MPLAB.
Проект Simulink модели готов для редактирования, отладки и компиляции в машинные коды контроллера средствами MPLAB.
Подключение программатора PIC-KIT3
Узнать какие программаторы записывают бинарный код в конкретный микроконтроллер можно в разделе меню → Configure → Select Device среды MPLAB 8.92. Например, программатор PIC-KIT3 не поддерживает контроллер PIC12C508A (Рис. 21, левый рисунок), но работает с контроллером PIC12F629 (Рис. 21, правый рисунок).
Рис. 21. Перечень программаторов для прошивки микроконтроллера.
Информацию об установленном драйвере программатора PIC-KIT3 можно запросить у менеджера устройств ОС Windows (Рис. 22).
Рис. 22. Информация об установленном драйвере программатора PIC-KIT3.
Схема подключения микроконтроллера PIC12F629 к программатору PIC-KIT3 показана на Рис. 23.
Рис. 23. Схема подключения микроконтроллера PIC12F629 к программатору PIC-KIT3.
Вывод PGM программатора для прошивки контроллеров PIC12F629 не используется. Наличие вывода PGM для разных типов PIC контроллеров показано на Рис. 24. Вывод PGM рекомендуется «притягивать» к общему проводу (GND), через резистор, номиналом 1К [3].
Рис. 24. Выводы PGM PIC контроллеров.
Индикация светодиодов программатора Olimex PIC-KIT3 показана в ниже:
Желтый — Красный — Состояние программатора
Вкл — Выкл — Подключен к USB линии
Вкл — Вкл — Взаимодействие с MPLAB
Мигает — Включен постоянно — Прошивка микроконтроллера
Не следует подключать питание микроконтроллера VDD (Рис. 23) к программатору, если контроллер запитывается от своего источника питания.
При питании микроконтроллера от программатора на линии VDD необходимо установить рабочее напряжение, например, 5В программой MPLAB (Menu → Programmer → Settings → Power), как показано на Рис. 25.
Примечание. При отсутствии напряжения на линии VDD MPLAB IDE выдает сообщение об ошибке: PK3Err0045: You must connect to a target device to use
Рис. 25. Установка напряжения VDD на программаторе PIC-KIT3 программой MPLAB IDE v8.92.
25. Установка напряжения VDD на программаторе PIC-KIT3 программой MPLAB IDE v8.92.
Если программатор не может установить требуемое напряжение, например, 5В при его питании от USB, в которой напряжение меньше 5В, MPLAB IDE выдает сообщение об ошибке: PK3Err0035: Failed to get Device ID. В этом случае, сначала необходимо измерить напряжение программатора — считать его в закладке меню → Programmer → Settings → Status, а затем установить напряжение (не больше измеренного) в закладке меню → Programmer → Settings → Power.
Рис. 26. Измерение (слева) и установка (справа) VDD напряжения программатора PIC-KIT3 программой MPLAB IDE v8.92.
Пример MPLAB сообщения успешного подключения микроконтроллера к программатору по команде меню → Programmer → Reconnect показан на Рис. 27.
Рис. 27. Сообщение MPLAB об успешном подключении микроконтроллера к программатору.
Можно программировать не только отдельный PIC контроллер, но и контроллер, находящийся в составе рабочего устройства. Для программирования PIC контроллера в составе устройства необходимо предусмотреть установку перемычек и токоограничивающих резисторов как показано на Рис. 28 [3].
Для программирования PIC контроллера в составе устройства необходимо предусмотреть установку перемычек и токоограничивающих резисторов как показано на Рис. 28 [3].
Рис. 28. Подключение микроконтроллера в составе электронного устройства к программатору.
Заключение
Малоразрядные PIC-контроллеры имеют широкий диапазон питания, низкое потребление и малые габариты. Они программируются на языках низкого уровня. Разработка программ на языке графического программирования Simulink с использованием многочисленных библиотек значительно сокращает время разработки и отладки в сравнении с программированием на уровне ассемблера. Разработанные для PIC-контроллеров Simulink структуры можно использовать и для компьютерного моделирования динамических систем с участием контроллеров. Однако, из-за избыточности кода такой подход применим только для семейств PIC контроллеров с достаточными ресурсами.
Библиографический список
1. PIC12F6XX. Однокристальные 8-разрядные FLASH CMOS микроконтроллеры компании Microchip Technology Incorporated. PIC12F629, PIC12F675. OOO “Микро-чип”. Москва – 2002.
PIC12F6XX. Однокристальные 8-разрядные FLASH CMOS микроконтроллеры компании Microchip Technology Incorporated. PIC12F629, PIC12F675. OOO “Микро-чип”. Москва – 2002.
2. Microchip. MPLAB IDE. User’s Guide with MPLAB Editor and MPLAB SIM Simulator
3. ICSP — Внутрисхемное программирование PIC-контроллеров DOC Rev 1.03 (последнее обновление 19.05.2005)
4. MPLAB IDE Help: MATLAB.
5. Introduction to Microchip-SIMULINK Blocksets and MATLAB Plug-in for MPLABIDE Produced by Murali Manohara Chembarpu.
6. Embedded Target for 16 bits PIC.
7. Dr. Bob Davidov. Портал научно-практических публикаций
Программатор для PIC контроллеров K150 ICSP USB
Программатор для PIC контроллеров K150 имеет компактный размер, но при этом поддерживает огромное количество микроконтроллеров. Позволяя производить их программирование, шифрование, считывание и т. д.
Характеристики:
– Рабочее напряжение: 5 Вольт DC от USB порта
– 40 контактный ZIF разъем
– Поддержка Windows 98, 2000, NT, XP и Windows 7
– ICSP интерфейс (встроенный разъем)
– LED индикатор питания и программирования
– Защита USB порта компьютера
– Размер: 83 х 46 мм
– Вес: до 120 гр.
Комплектация: программатор PIC K150, ICSP кабель загрузки, комплект стоек.
Скачать программное обеспечение и софт для программатора PIC K150 (архив RAR размер 114 МБ) =>>
Скачать программное обеспечение и софт для программатора PIC K150 (архив ZIP размер 15 МБ) =>>
Скачать MPLAB Tools v8.80 для программатора PIC K150 (архив ZIP размер 166 МБ) =>>
Поддержка микроконтроллеров:
10 Series: PIC10F200, PIC10F202, PIC10F204, PIC10F206, PIC10F220, PIC10F222
12C Series: PIC12C508, PIC12C508A, PIC12C509, PIC12C509A, PIC12C671, PIC12C672, PIC12CE518, PIC12CE519, PIC12CE673, PIC12CE674
12F Series: PIC12F508, PIC12F509, PIC12F629, PIC12F635, PIC12F675, PIC12F683
16C Series: PIC16C505, PIC16C554, PIC16C558, PIC16C61, PIC16C62, PIC16C62A, PIC16C62B, PIC16C63, PIC16C63A, PIC16C64, PIC16C64A, PIC16C65, PIC16C65A, PIC16C65B, PIC16C66, PIC16C66A, PIC16C67, PIC16C620, PIC16C620A, PIC16C621, PIC16C621A, PIC16C622, PIC16C622A, PIC16C71, PIC16C71A, PIC16C72, PIC16C72A, PIC16C73, PIC16C73A, PIC16C73B, PIC16C74, PIC16C74A, PIC16C74B, PIC16C76, PIC16C77, PIC16C710, PIC16C711, PIC16C712, PIC16C716, PIC16C745, PIC16C765, PIC16C773, PIC16C774, PIC16C83, PIC16C84
16F Series: PIC16F505, PIC16F506, PIC16F54, PIC16F57, PIC16F59, PIC16F627, PIC16LF627A, PIC16F627A, PIC16F628, PIC16LF628A, PIC16F628A, PIC16F630, PIC16F631, PIC16F631-1, PIC16F636, PIC16F636-1, PIC16F639, PIC16F639-1, PIC16F648A, PIC16F676, PIC16F677, PIC16F677-1, PIC16F684, PIC16F685, PIC16F685-1, PIC16F687, PIC16F687- 1, PIC16F688, PIC16F689, PIC16F689-1, PIC16F690, PIC16F690-1, PIC16F716, PIC16F72, PIC16F73, PIC16F74, PIC16F76, PIC16F77, PIC16F737, PIC16F747, PIC16F767, PIC16F777, PIC16F83, PIC16F84, PIC16F84A, PIC16F87, PIC16F88, PIC16F818, PIC16F819, PIC16F870, PIC16F871, PIC16F872, PIC16F873, PIC16F873A, PIC16LF873A, PIC16F874, PIC16F874A, PIC16F876, PIC16F876A, PIC16F877, PIC16F877A
18 Series: PIC18F242, PIC18F248, PIC18F252, PIC18F258, PIC18F442, PIC18F448, PIC18F452, PIC18F458, PIC18F1220, PIC18F1320, PIC18F2220, PIC18F2320, PIC18F2321, PIC18F4210, PIC18F2331, PIC18F2450, PIC18F2455, PIC18F2480, PIC18F2510, PIC18F2515, PIC18F2520, PIC18F2525, PIC18F2550, PIC18F2580, PIC18F2585, PIC18F2610, PIC18F2620, PIC18F2680, PIC18F4220, PIC18F4320, PIC18F6525, PIC18F6621, PIC18F8525, PIC18F8621, PIC18F2331, PIC18F2431, PIC18F4331, PIC18F4431, PIC18F2455, PIC18F2550, PIC18F4455, PIC18F4550, PIC18F4580, PIC18F2580, PIC18F2420, PIC18F2520, PIC18F2620, PIC18F6520, PIC18F6620, PIC18F6720, PIC18F6585, PIC18F6680, PIC18F8585, PIC18F8680
32-разрядных микроконтроллеров (MCU) | Микрочип Технология
Имя *Фамилия *
Компания *
Должность/ Должность * — Нет — АкадемическийИнженерный МенеджментМаркетингЗакупкиПродажиДругое
Телефон
Электронная почта *
Страна * Select your countryAfghanistan AFAland Islands AXAlbania ALAlgeria DZAmerican Samoa ASAndorra ADAngola AOAnguilla AIAntarctica AQAntigua and Barbuda AGArgentina ARArmenia AMAruba AWAustralia AUAustria ATAzerbaijan AZBahamas BSBahrain BHBangladesh BDBarbados BBBelarus BYBelgium BEBelize BZBenin BJBermuda BMBhutan BTBolivia BOBosnia and Herzegovina BABotswana BWBouvet Island BVBrazil BRBritish Virgin Islands VGBritish Indian Ocean Territory IOBrunei Darussalam BNBulgaria BGBurkina Faso BFBurundi BICambodia KHCameroon CMCanada CACape Verde CVCayman Islands KYCentral African Republic CFChad TDChile CLChina CNHong Kong, SAR China HKMacao, SAR China MOChristmas Island CXCocos (Keeling) Islands CCColombia COComoros KMCongo (Brazzaville) CGCongo, (Kinshasa) CDCook Islands CKCostate RCKôd Ivoire CICroatia HRCuba CUCyprus CYCzech Republic CZDenmark DKDjibouti DJDominica DMDominican Republic DOEcuador ECEgypt EGEl Salvador SVEquatorial Guinea GQEritrea EREstonia EEEthiopia ETFalkland Islands (Malvinas) FKFaroe Islands FOFiji FJFinland FIFrance FRFrench Guiana GFFrench Polynesia PFFrench Southern Territories TFGabon GAGambia GMGeorgia GEGermany DEGhana GHGibraltar GIGreece GRGreenland GLGrenada GDGuadeloupe GPGuam GUGuatemala GTGuernsey GGGuinea GNGuinea-Bissau GWGuyana GYHaiti HTHeard and Mcdonald Islands HMHoly See (Vatican City State) VAHonduras HNHungary HUIceland ISIndia INIndonesia IDIran, Islamic Republic of IRIraq IQIreland IEIsle of Man IMIsrael ILItaly ITJamaica JMJapan JPJersey JEJordan JOKazakhstan KZKenya KEKiribati KIKorea (North) KPKorea (South) KRKuwait KWKyrgyzstan KGLao PDR LALatvia LVLebanon LBLesotho LSLiberia LRLibya LYLiechtenstein LILithuania LTLuxembourg LUMacedonia, Republic of MKMadagascar MGMalawi MWMalaysia MYMaldives MVMali MLMalta MTMarshall Islands MHMartinique MQMauritania MRMauritius MUMayotte YTMexico MXMicronesia, Federated States of FMMoldova MDMonaco MCMongolia MNMontenegro MEMontserrat MSMorocco MAMozambique MZMyanmar MMNamibia NANauru NRNepal NPNetherlands NLNetherlands Antilles ANNew Caledonia NCNew Zealand NZNicaragua NINiger NENigeria NGNiue NUNorfolk Island NFNorthern Mariana Islands MPNorway NOOman OMPakistan PKPalau PWPalestinian Territory PSPanama PAPapua New Guinea PGParaguay PYPeru PEPhilippines PHPitcairn PNPoland PLPortugal PTPuerto Rico PRQatar QARéunion RERomania RORussian Federation RURwanda RWSaint-Barthélemy BLSaint Helena SHSaint Kitts and Nevis KNSaint Lucia LCSaint-Martin (French часть) MFСен-Пьер и Микелон PMСент-Винсент и Гренадины VCSамоа WSSСан-Марино SMSао Томе и Принсипи STSАудовская Аравия SASСенегал SNSСербия RSSейшельские острова SCSСьерра-Леоне SLSингапур SGSСловакия SKSСловения SIСоломоновы острова SBSомалия SOЮжная Африка ZAЮжная Грузия и Южные Сандвичевы острова GSЮжный Судан SSSИспания май ESSРи-Ланка LKSуданбар SDSуринам SRSval Острова SJСвазиленд SZШвеция SESШвейцария CHСирийская Арабская Республика (Сирия) SYТайвань, Китайская Республика TWТаджикистан TJТанзания, Объединенная Республика TZТаиланд THТимор-Лешти TLТого TGТокелау TKТонга TOTТринидад и Тобаго TTTЮнисия TNТурция TRТуркменистан TM USUS Малые отдаленные острова UMUРугвай UYУзбекистан UZВануату VUВенесуэла (Боливарианская Республика) VEВьетнам VNВиргинские острова, США VIОстрова Уоллис и Футуна WFЗападная Сахара EHYemen YEЗамбия ZMЗимбабве ZW
Штат/провинция (для США или Канады) Select your stateAlabama ALAlaska AKArizona AZArkansas ARCalifornia CAColorado COConnecticut CTDelaware DEFlorida FLGeorgia GAHawaii HIIdaho IDIllinois ILIndiana INIowa IAKansas KSKentucky KYLouisiana LAMaine MEMaryland MDMassachusetts MAMichigan MIMinnesota MNMississippi MSMissouri MOMontana MTNebraska NENevada NVNew Hampshire NHNew Jersey NJNew Mexico NMNew York NYNorth Carolina NCNorth Dakota NDOhio OHOklahoma OKOregon ORPennsylvania PARhode Island RISouth Carolina SCSouth Dakota SDTennessee TNTexas TXUtah UTVermont VTVirginia VAWashington WAWest Virginia WVWisconsin WIWyoming WYAmerican Samoa ASDistrict of Columbia DCGuam GUMarshall Islands MHMicronesia, Federated States of FMNorthern Mariana Islands MPPalau PWPuerto Rico PRVirgin Islands VIAlberta ABBritish Columbia BCManitoba MBNew Brunswick NBNewfoundland and Labrador NLNorthwest Territories NTNova Scotia NSNubavut NUOntario ONPrince Edward Остров PEQuebec QCSaskatchewan SKYukon YT
Тип запроса/необходима помощь *–Нет–Помощь в дизайне/редизайнеПомощь в выборе продуктаПомощь в поиске программного обеспеченияТехническая поддержкаПомощь в поиске партнера по дизайнуЗапрос документацииОбщая поддержка продажПомощь в поиске продуктов для следующего проектаДругое
Расскажите нам больше *
15 самых популярных микроконтроллеров PIC на рынке — производство печатных плат и сборка печатных плат
При разработке качественной электроники многое зависит от предполагаемого применения. Ключевым компонентом встроенных систем в электронике является микроконтроллер. Несмотря на разнообразие, разработчику электроники необходимо довольствоваться типом микроконтроллера, который соответствует его электронным потребностям. 9Микроконтроллеры PIC 0015 относятся к такому типу.
Ключевым компонентом встроенных систем в электронике является микроконтроллер. Несмотря на разнообразие, разработчику электроники необходимо довольствоваться типом микроконтроллера, который соответствует его электронным потребностям. 9Микроконтроллеры PIC 0015 относятся к такому типу.
Микроконтроллеры PIC являются программируемыми и самыми маленькими в мире. Он способен выполнять разнообразный спектр задач. Поэтому вы найдете их в системах сигнализации, компьютерных системах управления, телефонах, системах сигнализации и т. д. Понимание различных типов микроконтроллеров PIC дает информацию для процесса проектирования и программирования микроконтроллеров PIC. Хотите узнать больше? Продолжить чтение.
О микроконтроллерах PIC Микроконтроллеры PIC , также называемые программируемыми интерфейсными контроллерами, появились в 1993 году. Первоначально они были разработаны и разработаны для поддержки компьютеров PDP в управлении их вспомогательными устройствами, в настоящее время они имеют расширенную область применения.
Микроконтроллеры PIC основаны на гарвардской архитектуре, что делает их популярными. Это связано с простотой программирования, низкой стоимостью, широкой доступностью и простотой взаимодействия с другими вспомогательными компонентами. Кроме того, он обладает огромной пользовательской базой, помимо возможности последовательного программирования.
Запросить микроконтроллеры PIC
В качестве встроенного чипа микроконтроллер PIC состоит из ПЗУ, ОЗУ, таймеров, ЦП и счетчиков, которые поддерживают такие протоколы, как CAN, UART и SPI, для взаимодействия. Он также имеет флэш-память, порты ввода-вывода, EEPROM, UART, SSP, ADC и PSP, помимо ICSP и LCD. Такие компоненты составляют фундаментальный аспект архитектуры микроконтроллера PIC.
Архитектура микроконтроллера PIC определяет его функциональные возможности. Помимо рассмотрения четырех классификаций микроконтроллеров PIC, основанных на внутренней архитектуре, понимание различных типов микроконтроллеров PIC становится идеальным перед процессом проектирования. Классификации включают базовую PIC, улучшенную PIC среднего уровня, PIC среднего уровня и PIC18.
Классификации включают базовую PIC, улучшенную PIC среднего уровня, PIC среднего уровня и PIC18.
Микроконтроллеры PIC также нуждаются в программировании, чтобы адаптировать их к конкретным приложениям. Как разработчик, вы должны учитывать программное обеспечение для программирования микроконтроллера PIC , которое необходимо развернуть перед разработкой. Это позволяет ему нормально функционировать после завершения. В большинстве случаев типичный язык программирования часто содержит встроенный язык C. Давайте теперь рассмотрим архитектуру и процесс программирования микроконтроллера PIC.
Программирование микроконтроллера PIC Архитектура микроконтроллеров PIC Спроектировать и запрограммировать микроконтроллер PIC становится возможным только после понимания его архитектуры. Архитектура включает в себя порты ввода-вывода, ЦП, аналого-цифровой преобразователь, прерывания, осциллятор, счетчики/таймеры, модуль организации памяти CPP и последовательную связь.
Запросить изготовление и сборку печатных плат сейчас
Центральный процессорАналогично другим ЦП микроконтроллера. Он имеет CU, AC, ALU, аккумулятор и MU, среди других компонентов. Каждый аспект имеет свое применение. Например, блок управления (CU) управляет всем, что связано с CPU. Арифметико-логическое устройство (АЛУ) выполняет арифметические операции помимо принятия логических решений. Блок памяти (MU) хранит инструкции и т. д.
Организация памяти MU или модуль организации памяти состоит из ПЗУ, ОЗУ и стека. Оперативная память работает нестабильно и мгновенно сохраняет данные в своих регистрах. Регистры RAM классифицируются либо как регистры общего назначения (GPR), либо как регистры специального назначения (SFR). С другой стороны, в ПЗУ постоянно хранятся данные, а в случае микроконтроллера — программа. Все это функционирует за счет выполнения инструкций процессором. EEPROM позволяет многократно программировать ПЗУ вместо того, что происходит в обычном постоянном запоминающем устройстве (ПЗУ). Флэш-память также является ППЗУ и, таким образом, может многократно записывать, читать и стирать программы. Наконец, STACK хранит и выполняет информацию о завершении выполнения прерывания.
EEPROM позволяет многократно программировать ПЗУ вместо того, что происходит в обычном постоянном запоминающем устройстве (ПЗУ). Флэш-память также является ППЗУ и, таким образом, может многократно записывать, читать и стирать программы. Наконец, STACK хранит и выполняет информацию о завершении выполнения прерывания.
Все PIC16 содержат пять портов, включая порт A, B, C, D и E. Порт A представляет собой 16-битный порт для вывода и ввода на основе TRISA. регистр. Следующим является порт B, который представляет собой 8-битный порт для функций вывода или ввода, а порт C аналогичен порту B, но его работа определяется регистром TRISC. Порт D выступает в качестве ведомого порта для подключения к шине, а порт E выступает в качестве 3-битного порта, который управляет сигналами цифрового или аналогового преобразователя.
Шина Ее основной функцией является получение и передача данных от периферийного устройства к следующему. Шина имеет две классификации: шина адреса и шина данных. Шина данных только принимает и передает данные, в то время как адресная шина передает адрес памяти в ЦП от периферийных устройств.
Шина имеет две классификации: шина адреса и шина данных. Шина данных только принимает и передает данные, в то время как адресная шина передает адрес памяти в ЦП от периферийных устройств.
Он работает путем преобразования аналоговых значений напряжения в цифровые значения напряжения; он имеет пять входов для устройств с двадцатью восемью выводами и восемь входов для устройств с сорока выводами. Такая операция управляется специальными регистрами ADCON1 и ADCON0.
Счетчики/таймерыМикроконтроллеры PIC имеют четыре счетчика/таймера, тогда как 8-битный таймер или остальные могут работать в восьми- или шестнадцатибитном режиме, в зависимости от вашего выбора. Он генерирует действия по обеспечению точности, такие как определенные временные задержки между двумя операциями.
Последовательная связь Подразумевается последовательная передача данных бит за битом по определенному каналу связи. Он включает в себя USART, который использует один провод для передачи данных (о тактовых импульсах). Последовательная связь также включает в себя протокол SPI, который поддерживает трехпроводную связь SPI, и протокол I2C, который соединяет низкоскоростные устройства.
Он включает в себя USART, который использует один провод для передачи данных (о тактовых импульсах). Последовательная связь также включает в себя протокол SPI, который поддерживает трехпроводную связь SPI, и протокол I2C, который соединяет низкоскоростные устройства.
В основном используется для генерации времени. Микроконтроллер PIC имеет внешние генераторы, такие как кварцевые генераторы и RC-генераторы.
Модуль CCPРаботает в режимах «захват», «сравнение» или «PMW». Capture захватывает время поступления сигнала, а режим сравнения работает при сравнении захвата сигнала в аналоговом режиме. С другой стороны, режим PWM предлагает выходной сигнал с регулируемой шириной импульса с программируемым рабочим циклом и 10-битным разрешением.
Запросить производство и сборку печатных плат
Программирование микроконтроллеров PIC Для микроконтроллеров PIC всегда требуется программатор PIC , особенно при создании проекта микроконтроллера PIC. Программирование осуществляется с помощью встроенного языка C, и поэтому разработчику необходимо ознакомиться со всеми этими аспектами, прежде чем создавать свой проект PIC-контроллера . Но что все это влечет за собой?
Программирование осуществляется с помощью встроенного языка C, и поэтому разработчику необходимо ознакомиться со всеми этими аспектами, прежде чем создавать свой проект PIC-контроллера . Но что все это влечет за собой?
Прежде чем приступить к программированию микроконтроллеров PIC, важно понять, как разрабатывается стандартный микроконтроллер. Тем не менее, основные соображения влекут за собой выбор идеального проекта для программы микроконтроллера, такого как система светодиодной вспышки. Разработка схемы также становится жизненно важной. Здесь учитываются такие аспекты, как компоненты схемы, схемы и соединения.
Процесс программирования Программирование микроконтроллеров PIC часто осуществляется с помощью программного обеспечения «MP-Lab». Перед установкой компилятора требуется установка. Компиляторы включают компилятор GCC, компилятор CCS и т. д. После завершения процесса установки все, что вам нужно, это выполнить описанный ниже процесс.
- Откройте программу (программное обеспечение MPLAB). Он отобразит строку меню с различными параметрами, такими как инструменты, файл, редактирование, проект и параметры просмотра.
- Выберите вариант, названный «проект», и перейдите к параметру «проект проводной» в раскрывающемся меню. Это откроет окно, которое будет способствовать вашему программированию.
- Выберите подходящий тип микроконтроллера для вашего проекта
- Выберите подходящий компилятор в зависимости от ваших потребностей, помимо пути к местоположению вашего проекта. Вы можете выбрать компилятор CCS или GCC в зависимости от потребностей вашего микроконтроллера PIC. После этого выберите параметр обзора, а затем «ccsloader» в папке PICC из программных файлов. На этом этапе папка исходной группы создается в предполагаемой папке.
- На этом этапе очень важно присвоить вашему проекту подходящее имя, прежде чем нажимать «Далее», чтобы сохранить проект. В целевой папке создается папка исходной группы, которую вы выбираете в меню «Файл» и выбираете новый файл из раскрывающегося списка.

После создания кода PIC-микроконтроллера вы должны загрузить его в микроконтроллер в процессе, который считается дампом. Микроконтроллеры понимают исключительно язык машинного уровня, состоящий из 0 и 1. Таким образом, процесс дампа требует специального программного обеспечения для загрузки кода.
Крайне важно выбрать и установить предпочитаемую программу из множества предложений на рынке. Кроме того, комплект программатора PIC будет поставляться в комплекте с аппаратным комплектом. Подключите микроконтроллер PIC к аппаратному комплекту и следуйте описанному ниже процессу, чтобы записать код в микроконтроллер PIC.
- Соедините комплект программатора или оборудование с компьютером с помощью последовательного кабеля
- Разместите микроконтроллер PIC и зафиксируйте его на плате через гнездо
- Откройте установленную программу. Он отобразит строку меню с различными параметрами, такими как открытие, функции, файл, настройка, параметры сохранения.
- Перейдите к «открыть» и перейдите к «загрузке файла».
- Выберите опцию загрузки, чтобы загрузить шестнадцатеричный файл в микроконтроллер PIC
Запросить микроконтроллеры PIC
Как правильно выбрать микроконтроллеры PIC Программатор picНа рынке существует множество микроконтроллеров PIC. Поэтому всегда трудно выбрать правильный тип и размер микроконтроллера PIC при разговоре с вашей компанией по сборке печатных плат или схем. Однако, в зависимости от ваших потребностей, мы из RayMing PCB and Assembly сообщим вам об этом. Что еще? Вы получите высококачественные услуги по сборке микроконтроллера PIC по разумным ценам.
Но прежде чем остановиться на конкретном типе микроконтроллера PIC, учтите следующее.
- Доступен ли он в разных частях мира?
- Имеет ли он низкую стоимость?
- Насколько прост процесс программирования микроконтроллера PIC, особенно с EEPROM?
Запросить производство и сборку печатных плат сейчас
Лучшие и популярные микроконтроллеры PIC Если вам нужен лучший микроконтроллер PIC, то крайне важно рассмотреть следующие популярные и лучшие микроконтроллеры PIC на рынке. .
.
PIC16f877a/PIC16f877 имеет простой процесс программирования, помимо удобства использования. Из-за этого он оказался популярным вариантом микроконтроллера в отрасли. Он бывает 8-битным или 16-битным и имеет технологию флэш-памяти, позволяющую выполнять многочисленные процессы записи-стирания. Хотя это идеально, потому что общее количество контактов (всего 40 и 33 для вывода и ввода) в основном применяется в цифровых электронных схемах и проектах микроконтроллеров PIC. Он играет важную роль в устройствах и системах домашней автоматизации, промышленных инструментах, дистанционных датчиках и устройствах безопасности.
Ключевые атрибуты
- Меньший набор из 35 инструкций
- Может работать на частоте до 20 МГц
- Рабочее напряжение составляет от 4,2 до 5,5 вольт. Все, что выше 5,5 вольт, может привести к необратимому повреждению.
- В микроконтроллере PIC отсутствует внутренний генератор по сравнению с другими микроконтроллерами, такими как PIC18F4550 и PIC18F46K22.

- Ограничение максимального тока в 10 мА для каждого контакта GPIO в качестве источника или приемника может обеспечить только приблизительно 100 мА.
- Он поставляется в корпусе из четырех интегральных схем: 40-контактный PDIP, 44-контактный TQFP, 44-контактный PLCC и 44-контактный QFN.
Это 8-разрядный CMOS-микроконтроллер, разработанный на основе высокопроизводительной RISC-архитектуры. PIC12f675 отличается небольшими размерами и экономичностью, что делает его популярным среди инженеров и любителей. Дизайн идеально подходит для недорогих систем и приложений благодаря флэш-памяти объемом 2 Кбайт. Он также содержит 6 контактов GPIO, которые могут обрабатывать ток не более 25 мА, что соответствует порогу многих датчиков и периферийных устройств.
Ключевые атрибуты
- 8-разрядный ЦП
- Восемь контактов, шесть из которых программируются
- Интерфейс ICSP для связи
- Имеет 8-разрядный счетчик и 16-разрядный счетчик внутренний генератор 4 МГц
- ЭСППЗУ 128 байт
- Рабочее напряжение 2,0–5,5 В
Это известный и наиболее широко используемый микроконтроллер на основе микроконтроллера PIC. PIC16f84 представляет собой 8-разрядный микроконтроллер среднего класса с памятью программ на 1024 слова. Он также имеет оперативную память 68 байт и постоянное хранилище EPROM 64 байта. Поразительным фактором PIC 16f84 является то, что его можно перепрограммировать с помощью встроенного ICSP.
PIC16f84 представляет собой 8-разрядный микроконтроллер среднего класса с памятью программ на 1024 слова. Он также имеет оперативную память 68 байт и постоянное хранилище EPROM 64 байта. Поразительным фактором PIC 16f84 является то, что его можно перепрограммировать с помощью встроенного ICSP.
Ключевые атрибуты
- A 1,75 КБ. от -40 до -85 °C
Запросить производство и сборку печатных плат
PIC12f629Это 8-разрядный микроконтроллер CMOS на основе флэш-памяти, который легко программируется. Микроконтроллер PIC сочетает в себе мощную архитектуру микроконтроллера PIC® в 8-контактном корпусе. Он имеет различные функции, которые делают его популярным, например, одноканальный компаратор помимо 128-байтовой EEPROM. Он идеально подходит для применения в промышленной, автомобильной и бытовой электронике.
Ключевые атрибуты
- EEPROM 128 байт
- Поддержка отладки или программирования MPLAB® ICD-2 с бесплатным адаптером заголовка
- Программируемые подтягивающие резисторы -on reset
- Возможность прерывания
- 8-уровневый стек (аппаратное обеспечение)
- Режимы косвенной, относительной и прямой адресации
- Расширенный диапазон температуры
- Энергосберегающий спящий режим
- POR с низким энергопотреблением
- Таймер включения питания и OST (таймер запуска генератора)
- Сторожевой таймер
 Кроме того, он содержит архитектуру PIC® в 28-контактном корпусе. PIC16f886 имеет EEPROM объемом 256 байт, является самопрограммируемым и имеет два компаратора, помимо других важных функций. Это делает его популярным выбором для приложений в таких секторах, как промышленность, автомобилестроение, бытовая техника и бытовая техника.
Кроме того, он содержит архитектуру PIC® в 28-контактном корпусе. PIC16f886 имеет EEPROM объемом 256 байт, является самопрограммируемым и имеет два компаратора, помимо других важных функций. Это делает его популярным выбором для приложений в таких секторах, как промышленность, автомобилестроение, бытовая техника и бытовая техника.Ключевые атрибуты
- Диапазон частот 8–32 МГц
- POR и режимы энергосбережения
- Расширенный WDT (сторожевой таймер) со встроенным RC-генератором для обеспечения надежной работы
- ICSP через два контакта
- Усовершенствованная флэш-память программ с сотней тысяч циклов записи/стирания.
- Емкость хранения EEPROM данных, превышающая сорок лет
- Альтернативный вариант прерывания при смене контакта
- 8-битный таймер в комплекте с 8-битным предварительным делителем TMRO
- Supports LIN, RS-232, RS-485 compatibility
- 10-bit eleven channel A/D converter
Request PCB Manufacturing & Assembly Quote Now
PIC18f4520 The popular PIC microcontroller mainly gets развернуты во встроенных системах и системах автоматизации. Он поставляется как TQFP, PDIP или QFN. PDIP имеет 40 контактов, а остальные содержат 44-контактный интерфейс. Он содержит 10-разрядный АЦП, память данных EEPROM объемом 256 байт и ОЗУ объемом 1536 байт.
Он поставляется как TQFP, PDIP или QFN. PDIP имеет 40 контактов, а остальные содержат 44-контактный интерфейс. Он содержит 10-разрядный АЦП, память данных EEPROM объемом 256 байт и ОЗУ объемом 1536 байт.
Ключевые атрибуты
- Два компаратора
- 10-разрядный аналого-цифровой преобразователь с тринадцатью каналами
- Хорошая выносливость памяти 1000000 и 100000 для EEPROM и памяти программ, соответственно
- Расширенная функция последовательной связи с EUSART периферийные устройства
- 10-разрядный АЦП
- Широкий диапазон рабочего напряжения 2,0–5,5 В
- POR (сброс при включении питания)
- Таймер включения (PWRT) и OST (таймер запуска генератора)
- ICD через два контакта
Это популярный 8-разрядный микроконтроллер PIC с улучшенной технологией NanoWatt и флэш-процессором. Микроконтроллер PIC имеет три различных пакета: SSOP, PDIP и QFN. SSOP имеет 20-контактный корпус, а PDIP и QFN — 18-контактный и 28-контактный корпуса соответственно.
Атрибуты ключа
- Размер программной памяти 7 КБ для хранения инструкций
- 10-разрядный АЦП для преобразования аналогово-цифровых сигналов
- Кварцевый генератор с частотой не более 20 МГц для взаимодействия с микросхемой, кроме генерации тактовых импульсов
- 18 общее количество контактов PDIP
- 2-5,5 В рабочего напряжения
- Флэш-память программ
- 256 байт EEPROM
- 5 9 портов и 16 контактов ввода/вывода
- Два компаратора
Это мощный и простой в программировании 8-разрядный микроконтроллер PIC на основе CMOS и флэш-памяти. PIC16f676 содержит мощную архитектуру микроконтроллера PIC® в 14-контактном корпусе. Это 10-битный аналого-цифровой преобразователь с восемью каналами, одним компаратором и памятью данных EEPROM. Он применяется в промышленных, автомобильных, потребительских и бытовых продуктах начального уровня, особенно в тех, которые требуют перепрограммирования на месте. 9
9
8-контактный микроконтроллер CMOS PIC с флэш-памятью поставляется с технологией nanoWatt. Он предлагает преимущества, связанные с архитектурой x14 среднего уровня, включая стандартные функции. Такие функции делают его популярным микроконтроллером PIC для автомобильных и промышленных приложений.
Ключевые атрибуты
- Расширенный WDT
- EEPROM 256 байт
- Поддержка программирования или отладки MPLAB® ICD-2 с бесплатным адаптером заголовка режимы косвенной и прямой адресации
- Энергосберегающий спящий режим
- Сброс при включении питания
- PWRT и OST
- Программируемая кодовая защита
- 1 мкА при 2,0 В Типовой ток сторожевого таймера
Запросить производство и сборку печатных плат
PIC18f452 Популярный и мощный микроконтроллер PIC представляет собой 8-разрядный микроконтроллер CMPS FLASH. Он содержит 34 контакта ввода-вывода и поставляется с одним 16-битным и 8-битным таймером, 10-битным аналого-цифровым преобразователем, периферийными устройствами SPI, I2C и USART.
Он содержит 34 контакта ввода-вывода и поставляется с одним 16-битным и 8-битным таймером, 10-битным аналого-цифровым преобразователем, периферийными устройствами SPI, I2C и USART.
Ключевые атрибуты
- 8-битный ЦП
- Всего 34 контакта ввода-вывода
- Модуль АЦП с одним 8-канальным и 10-битным
- Нулевые компараторы
- Один 8-разрядный и три 16-разрядных временных модуля
Это популярный и относительно новый тип микроконтроллера PIC, который не может работать на старых моделях устройств. PIC16f628 основан на программной памяти FLASH 3.5, 2 компараторах и одном CCP. Что делает его отличным вариантом, так это программирование низкого напряжения, программируемый BOR, встроенное опорное напряжение и другие функции.
Ключевые атрибуты
- 3,5 КБ.
8-битный микроконтроллер PIC от Microchip имеет 20-контактный интерфейс. Он включает в себя высокопроизводительный процессор RISC, который помогает в выполнении инструкций.
 Микропроцессор также имеет кварцевый генератор 20 МГц для интерфейсных целей и создания тактовых импульсов.
Микропроцессор также имеет кварцевый генератор 20 МГц для интерфейсных целей и создания тактовых импульсов.Ключевые атрибуты
- Всего в общей сложности
- 2-5,5 В. До 12 каналов
- MAX 20 МГц осциллятор
- 1 USART
- Два компаратора
PIC16 FLASTER с A -FLASTER FLASTER. FLASTER FLASTER. FLASTER FLASTER. FLASTER FLASTER. FLASTER FLASTER. FLASTER FLASTER. FLASTER FLASTER. PICBERES FLASTER. FLASTER PICB1. FLASTER PICBERSIBLE. FLASTER FLASTER. FLASTER. FLASTER. Он использует передовую технологию CAN и применяется в автомобильном и промышленном секторах.
Ключевые атрибуты
- Высокопроизводительный ЦП RISC, совместимый с линейной памятью данных и программ 1536 и 32 байт соответственно
- Сильноточный источник/приемник 25 мА/25 мА
- Один 16-битный или 8-битный счетчик с предварительным делителем
- 3-проводной SPI с битом IoA
- PoR и PWRT
- 1000000 стандартных циклов записи/стирания EEPROM
- WDT в комплекте со встроенным RC-генератором
- 35 9018 DIP-выводов и0194
Запросить производство и сборку печатных плат
PIC18f4620Микроконтроллер PIC оптимизирован и оснащен архитектурой RISC.
 Он работает на флэш-памяти и имеет скорость процессора 10 DMIPS/MIPS, что делает его тостом для некоторых людей. Его максимальный АЦП составляет 10 бит с CCP, равным 1.
Он работает на флэш-памяти и имеет скорость процессора 10 DMIPS/MIPS, что делает его тостом для некоторых людей. Его максимальный АЦП составляет 10 бит с CCP, равным 1.Ключевые атрибуты
- 1 АЦП
- 64 КБ памяти программ
- 1 CCP
- Два компаратора
- One I2C
- 2-5,5 В. высокопроизводительный, недорогой и 8-разрядный статический микроконтроллер. Он использует флэш-технологию CMO с 8 контактами. Он также имеет DRT (таймер сброса устройства), который устраняет необходимость во внешней схеме сброса.
Ключевые атрибуты
- Базовый 8-битный CPU
- Всего 8 CINS
- 6 PINS
- Один 8-битный модуль времени
- 4 MHZ Внутренний возраст
- 40184. EEPROM
Всегда важно понимать все о микроконтроллерах PIC, включая различные типы, программировать их и т. д. Такая информация становится полезной при проектировании интегральных схем и электроники в целом.

