
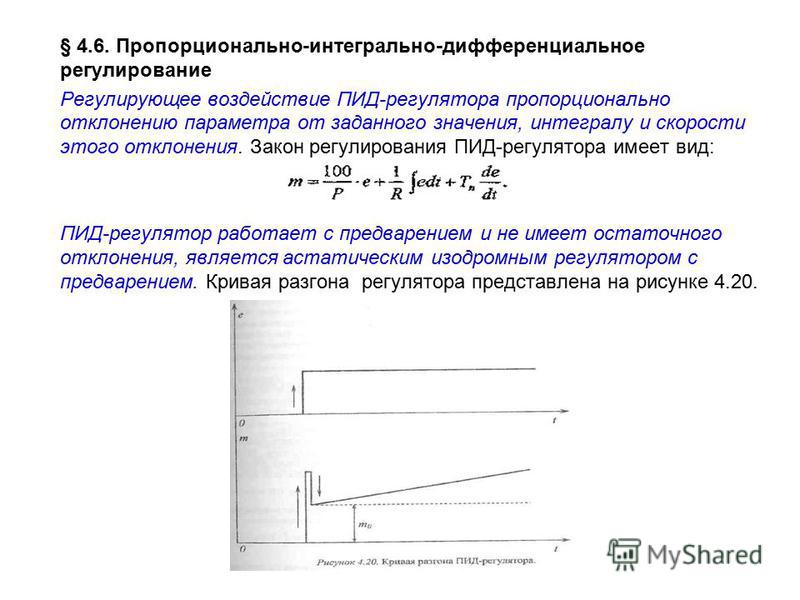
ПИД-регулирование и выполнение ПИД-закона регулирования
ПИД-регулирование, или пропорционально-интегрально-дифференциальное регулирование — процесс, используемый в сфере промышленной автоматизации. Он сложный и трудоемкий, так как предполагает взаимодействие нескольких параметров и функций.
Основная цель — корректировка и поддержание заданного значения температуры, давления, оборотов двигателя и пр., т.е. контроль над постоянством заданных значений в системе автоматического управления. Поэтому ПИД-регулятор — ключевой элемент подобных систем.
Благодаря этому устройству обеспечивается выполнение ПИД-закона регулирования. Оно формирует управляющий сигнал, который создается на основании 3 показателей:
- пропорционального,
- интегрального,
- дифференциального.
ПИД-закон обеспечивает более точные результаты в поддержании температурных показателей по сравнению с позиционным.
В ней N — Мощность, а коэффициенты обозначаются как:
Kp — пропорциональный,
Ki — интегральный,
Kd — дифференциальный.
В зависимости от полученных результатов расчетов настраивается ПИД-регулятор.
Пропорциональное регулирование
Суть пропорциональной составляющей заключается в получении, а также обработке данных, которые впоследствии сравниваются. Основная задача — сравнивать входное и заданное значение параметров, а также умножать на подобранный коэффициент. В результате чего получается требуемое выходное значение.
Однако сложность в том, что нужный коэффициент подобрать иногда довольно затруднительно. Это связано с разнообразными факторами, влияющими на расчет параметров:
ПИД-регулятор Термодат-22К5
- качеством регулирования,
- целями,
- параметрами регулятора,
- частотой воздействия,
- уровнем помех и пр.

Поэтому регулирование ПИД-регулятора может происходить либо теоретически, либо экспериментально.
Интегральное регулирование
Этот компонент направлен на вычисление интеграла отклонения величины по времени. Другими словами, в этом процессе выявляются «ошибки». Это дополняет, а также помогает сглаживать показатели пропорциональной составляющей.
В настройке ПИД-регулятора в данном случае также участвует коэффициент. Нахождение и настройка нужного показателя могут быть заданы на приборе автоматически. Либо его можно настроить вручную. Однако для этого необходимо обладать опытом и достаточным уровнем квалификации.
Дифференциальное регулирование
Главной функцией этой составляющей считается прогнозирование и предотвращение ошибок. Также она препятствует резким скачкам. Дифференциальный коэффициент ПИД-регулятора подбирают в зависимости от динамики и темпа изменений измеряемых показателей.
Обычно ПИД-регулирование измерительных устройств проводится в соответствии с технической литературой. Настройка может проводиться разными методами. Но необходимо помнить, что это — ответственный и трудоемкий процесс, от которого зависит точность результатов. Поэтому такая задача под силу только опытным специалистам.
ПИД-регулятор. Частные случаи (П, ПД, ПИ-регулятор) – Глосарій – Корисна інформація
Головна » Корисна інформація » Глосарій
Пропорциональное регулирование (П-закон)
Аналоговый П-регулятор (см. ЛУ в приборах ТРМ1, 2ТРМ1, ТРМ201, ТРМ202)
При цифровой реализации П-закона регулирования выходной сигнал регулятора Yi пропорционален величине рассогласования Ei, т. е.
Xp – полоса пропорциональности, в пределах которой справедлива эта формула
Ei – разность между заданным Туст и текущей Тi значениями измеряемой величины, или рассогласование
Полоса пропорциональности Xp, как и отклонение E, выражается в единицах контролируемого параметра. Чем шире полоса пропорциональности Xp, тем меньше величина выходного сигнала Y при одном и том же отклонении E.
Чем шире полоса пропорциональности Xp, тем меньше величина выходного сигнала Y при одном и том же отклонении E.
Вне полосы пропорциональности выходной сигнал Y равен 0 или 100 %.
При действии П-закона регулятор выдает импульсы, в которых присутствует только пропорциональная составляющая величины выходного сигнала.
Выходной сигнал П-регулятора и длительность управляющих импульсов при различных значениях Xp и E=10
Зависимость выходного сигнала П-регулятора от рассогласования при различных значениях Xp
Пропорционально-дифференциальное регулирование (ПД-закон)
При работе прибора в режиме ПД-регулятора величина выходного сигнала Yi зависит не только от величины отклонения Ei, но и от скорости его изменения:
Xp – полоса пропорциональности
Ei – рассогласование
τл – постоянная времени дифференцирования
ΔEi – разность между двумя соседними измерениями Ei и Ei-1
Δtизм – время между двумя соседними измерениями Ti и Ti–1
ΔEi / Δtизм – скорость изменения рассогласования E i
Изменение выходного сигнала регулятора при ступенчатом изменении отклонения показано на рисунке. В первый период после ступенчатого изменения Ei регулятор выдает управляющий импульс, в котором, кроме пропорциональной составляющей, вызванной рассогласованием Ei, добавляется дифференциальная (заштрихованная часть) ΔYд, которая зависит от величины ΔEi и τл коэффициента. В последующих импульсах присутствует только пропорциональная составляющая, так как нет изменения Ei.
В первый период после ступенчатого изменения Ei регулятор выдает управляющий импульс, в котором, кроме пропорциональной составляющей, вызванной рассогласованием Ei, добавляется дифференциальная (заштрихованная часть) ΔYд, которая зависит от величины ΔEi и τл коэффициента. В последующих импульсах присутствует только пропорциональная составляющая, так как нет изменения Ei.
Выходной сигнал ПД-регулятора и длительность управляющих импульсов при различных значениях и E=10
Пропорционально-интегральное регулирование (ПИ-закон)
При работе прибора в режиме ПИ-регулятора величина выходного сигнала Yi зависит как от величины отклонения E
Xp – полоса пропорциональности
Ei – рассогласование
τи – постоянная времени интегрирования
∑Ei – накопленная в i-й момент времени сумма рассогласований (интегральная сумма)
Из рисунка видно, что в первый момент времени, когда нет отклонения (Ei=0), нет и выходного сигнала (Yi=0). С появлением отклонения Ei появляются импульсы, длительность которых постепенно увеличивается. В импульсах присутствует пропорциональная составляющая, которая зависит от величины E (незаштрихованная часть импульсов) и интегральная составляющая (заштрихованная часть). Увеличение длительности импульсов происходит за счет роста интегральной составляющей, которая зависит от рассогласования E i и коэффициента τи.
С появлением отклонения Ei появляются импульсы, длительность которых постепенно увеличивается. В импульсах присутствует пропорциональная составляющая, которая зависит от величины E (незаштрихованная часть импульсов) и интегральная составляющая (заштрихованная часть). Увеличение длительности импульсов происходит за счет роста интегральной составляющей, которая зависит от рассогласования E i и коэффициента τи.
Выходной сигнал ПИ-регулятора и длительность управляющих импульсов при различных значениях и E=10
Полезные ссылки
ПИД-регуляторы (терморегуляторы)
SCIRP Открытый доступ
Издательство научных исследований
Журналы от A до Z
Журналы по темам
- Биомедицинские и биологические науки.
- Бизнес и экономика
- Химия и материаловедение.
- Информатика. и общ.
- Науки о Земле и окружающей среде.
- Машиностроение
- Медицина и здравоохранение
- Физика и математика
- Социальные науки. и гуманитарные науки
Журналы по тематике
- Биомедицина и науки о жизни
- Бизнес и экономика
- Химия и материаловедение
- Информатика и связь
- Науки о Земле и окружающей среде
- Машиностроение
- Медицина и здравоохранение
- Физика и математика
- Социальные и гуманитарные науки
Публикация у нас
- Представление статьи
- Информация для авторов
- Ресурсы для экспертной оценки
- Открытые специальные выпуски
- Заявление об открытом доступе
- Часто задаваемые вопросы
Публикуйте у нас
- Представление статьи
- Информация для авторов
- Ресурсы для экспертной оценки
- Открытые специальные выпуски
- Заявление об открытом доступе
- Часто задаваемые вопросы
Подпишитесь на SCIRP
Свяжитесь с нами
клиент@scirp. org org | |
| +86 18163351462 (WhatsApp) | |
| 1655362766 | |
| Публикация бумаги WeChat |
| Недавно опубликованные статьи |
| Недавно опубликованные статьи |
Подпишитесь на SCIRP
Свяжитесь с нами
клиент@scirp. org org | |
| +86 18163351462 (WhatsApp) | |
| 1655362766 | |
| Публикация бумаги WeChat |
Бесплатные информационные бюллетени SCIRP
Copyright © 2006-2023 Scientific Research Publishing Inc. Все права защищены.
ВершинаОбъяснение настроек PID | Только пропорциональное управление
В этой статье мы рассмотрим влияние только пропорционального действия на контур управления потоком.
Только пропорциональное управление является простейшим из действий ПИД-регулятора, но редко используется в промышленных производственных процессах.
Проблема с P-Only Control связана с тем, что называется смещением. В этой статье мы объясним смещение и покажем вам, как и когда оно происходит.
В этой статье мы объясним смещение и покажем вам, как и когда оно происходит.
Контроллер в нашем контуре типичен для большинства контроллеров. Мы можем настроить уставку и переключаться между автоматическим и ручным режимами. При ручном управлении мы можем настроить выход контроллера на желаемую величину.
В контуре потока есть насос для перемещения технологической жидкости. Мы можем включать и выключать насос, что будет очень полезно для наблюдения за откликами ПИД-регулятора в статических и динамических условиях.
Хорошо… Давайте начнем с рассмотрения P&ID нашего контура управления потоком.
Управление потоком осуществляется с помощью пневматического исполнительного механизма FCV200. Контроллер FRC200 выдает электрический сигнал, который приводит в действие пневматический конечный привод через преобразователь тока в давление (I/P) FY200.
Контроллер FRC200 выдает электрический сигнал, который приводит в действие пневматический конечный привод через преобразователь тока в давление (I/P) FY200.
Датчик перепада давления FT200 отправляет электрический сигнал, отображающий скорость потока, на контроллер.
Настройки ПИД-регулятора 1) Только пропорциональныйдавайте посмотрим на петлю потока в действии. Хорошо… Давайте начнем исследовать влияние регулировки количества пропорционального действия на нашу петлю потока.
Диапазон выходного сигнала контроллера составляет от 4 до 20 мА, что соответствует от 0 до 100 %. Когда процесс стабилен, выходной сигнал контроллера будет иметь значение от 4 до 20 мА.
Переменная процесса также представлена сигналом от 4 до 20 мА от преобразователя расхода. Этот сигнал представляет от 0 до 100 % переменной процесса.
Хорошо, теперь, когда мы знаем, как работает контур потока, давайте перейдем к пропорциональному управлению. Итак, что такое пропорциональное действие?
Итак, что такое пропорциональное действие?
Работа контроллера заключается в обеспечении того, чтобы переменная процесса была такой же, как уставка. Контроллер всегда смотрит на разницу между уставкой и переменной процесса. Эту разницу часто называют ошибкой .
Пропорциональное Действие является Усилением Ошибки. Это пропорциональное усиление не имеет единиц и часто упоминается как 9.0005 Усиление . Этот усиленный результат добавляется к текущему выходу контроллера.
ОК. Теперь у нас есть простая математическая формула.
Новый выход контроллера = предыдущий выход контроллера (CO) + (усиление × ошибка)
Пример #1Давайте рассмотрим пример пропорционального действия и применимость этой математической формулы.
Начнем с ВЫКЛЮЧЕННОГО насоса. С контроллером в ручном режиме мы установим выход на 50%. Мы установим Gain на 1.
Теперь давайте установим контроллер в автоматический режим.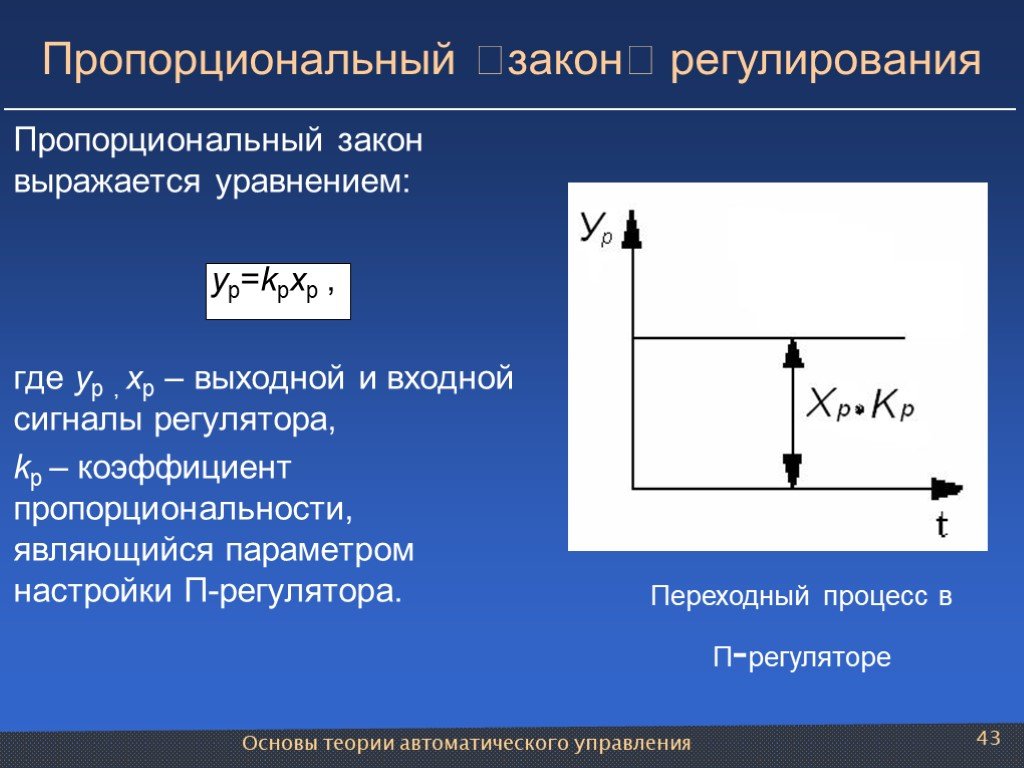 При выключенном насосе PV или переменная процесса будет равна 0.
При выключенном насосе PV или переменная процесса будет равна 0.
Посмотрите, что произойдет, если мы изменим уставку с 0% на 10%. Изменение уставки на 10 % привело к 10-процентному изменению выходного сигнала контроллера. Почему? Выход контроллера (CO) изменился на 10% с 50% до 60%.
Ранее мы говорили, что пропорциональное действие приводит к изменению выхода контроллера на основе простой математической формулы: Выход контроллера = CO + (Коэффициент усиления × ошибка)
Наша уставка изменилась с 0 на 10%, что дает ошибку 10%. Усиление установлено на 1,
Поскольку усиление равно 1, пропорциональное действие добавит только 10 % к выходному сигналу контроллера. Выход контроллера был на уровне 50%, поэтому добавление пропорционального отклика сдвинет его на 60%.
Пример #2 Давайте попробуем еще раз, но на этот раз мы увеличим усиление до 2. На этот раз CO изменился с 50% до 70%, что составляет изменение на 20%. Почему? Поскольку усиление теперь установлено на 2, пропорциональное действие добавит 20% к выходу контроллера.
Имейте в виду, что насос был выключен в обоих наших экспериментах. При выключенном насосе у нас нет возможности изменить переменную процесса, поэтому наше пропорциональное действие действует на статические условия.
После запуска насоса мы находимся в динамичной среде, и переменные со временем меняются.
Пример #3Включим насос и посмотрим на динамическую реакцию пропорционального действия. Мы начинаем с переменной процесса со значением уставки 75%.
Когда мы вводим изменение уставки на 65%, контроллер инициирует пропорциональное действие и пытается изменить переменную процесса, чтобы перейти на 65%. Но переменная процесса достигает только 69% и остается там!
Пропорциональный контроллер выполняет ожидаемую от него работу, по крайней мере, до тех пор, пока не произойдет изменение возмущения, переменной процесса или заданного значения.
Смещение в ПИД-регуляторе Вначале переменная процесса равна заданному значению, а ошибка равна нулю. Переменная процесса стабильна. Нарушение процесса приведет к изменению переменной процесса, и контроллер сработает.
Переменная процесса стабильна. Нарушение процесса приведет к изменению переменной процесса, и контроллер сработает.
К сожалению, процесс вернется к состоянию стабильности, НО НЕ с переменной процесса в заданном значении.
Разница между переменной процесса и заданным значением называется смещением и возникает только в пропорциональных контроллерах.
Эта статья является частью бесплатного курса. Если вы хотите узнать больше о ПИД-контроллерах в удобном для понимания формате, перейдите на сайтlearn.realpars.com, где вы можете записаться на этот курс «Основы ПИД-регулятора», а также на несколько других курсов по программированию ПЛК. и другие темы, связанные с промышленной автоматизацией и робототехникой бесплатно.
Этот курс дает вам базовое понимание ПИД-регуляторов в очень удобном формате.
В следующей части Настройки PID | Пропорционально-интегральное управление , мы покажем вам, как добавление интегрального (I) действия поможет вернуть переменную процесса обратно к заданному значению, тем самым устранив смещение.
