
Радио управление 10 команд своими руками

В этой статье, вы увидите как сделать радиоуправление на 10 команд своими руками. Дальность действия данного устройства 200 метров на земле и более 400м в воздухе. Нажатие кнопок может производиться в любой последовательности, хоть все сразу все работает стабильно. С помощью его можно управлять разными нагрузками: воротами гаража, светом, моделями самолетов, автомобилей и так далее… В общем чем угодно, все зависит от вашей фантазии.
Для работы нам потребуются список деталей:
1) PIC16F628A-2 шт (микроконтроллер)
2) MRF49XA-2 шт (радио трансмиттер)
3) Катушка индуктивности 47nH (или намотать самому)-6шт
Конденсаторы:
4) 33 мкФ (электролитический)-2 шт
5) 0,1 мкФ-6 шт
6) 4,7 пФ-4 шт
7) 18 пФ-2 шт
Резисторы
8) 100 Ом-1 шт
9) 560 Ом-10 шт
10) 1 Ком-3 шт
11) светодиод-1 шт
13) Кварц 10MHz-2 шт
14) Текстолит
15) Паяльник
Вот схема этого устройства
Передатчик

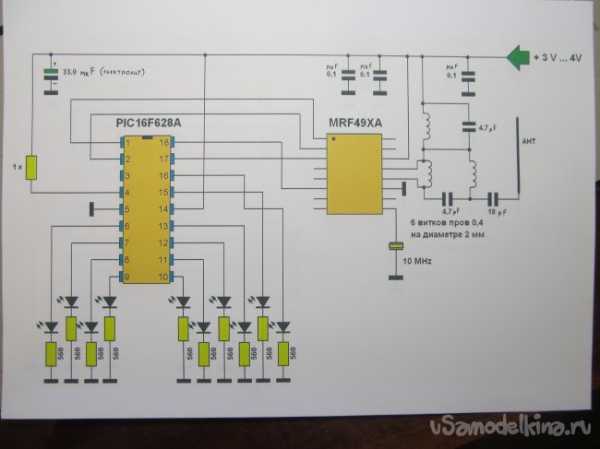
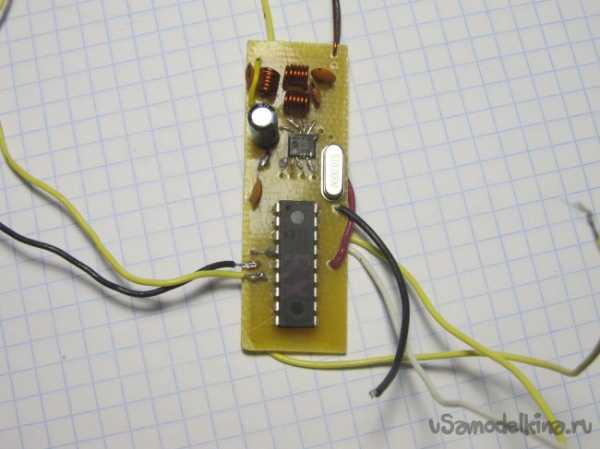
И приемник

Как видите устройство состоит из минимум деталей и под силу каждому. Стоит только захотеть. Устройство очень стабильное, после сборки работает сразу. Схему можно делать как на печатной плате. Так и навесным монтажом (особенно для первого раза, так будет легче программировать). Для начала делаем плату. Распечатываем

И травим плату

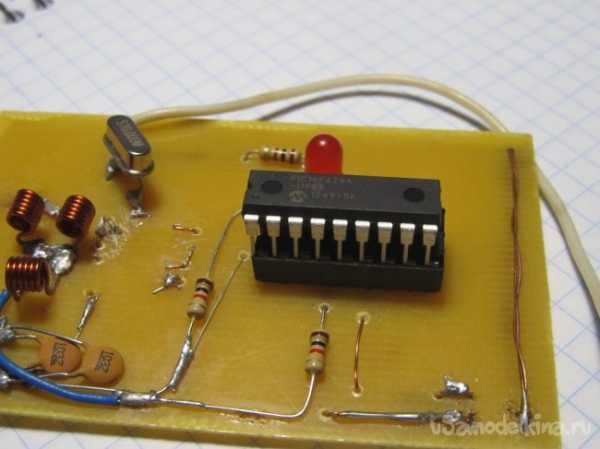
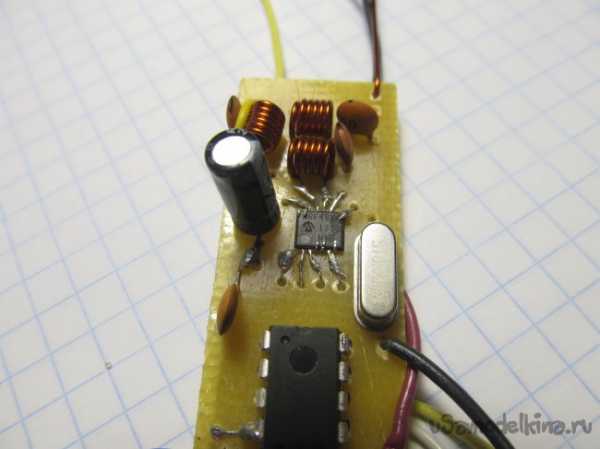
Припаиваем все компоненты, PIC16F628A лучше припаивать самым последним, так как его нужно будет еще запрограммировать. Первым делом припаиваем MRF49XA

Главное очень аккуратно, у нее очень тонкие выводы. Конденсаторы для наглядности. Самое главное не перепутать полюса на конденсаторе 33 мкФ так как у него выводы разные, один +, другой -. Все остальные конденсаторы припаиваете как хотите у них нет полярности на выводах


Катушки можно использовать покупные 47nH но лучше намотать самому, все они одинаковые (6 витков провода 0,4 на оправке 2 мм)

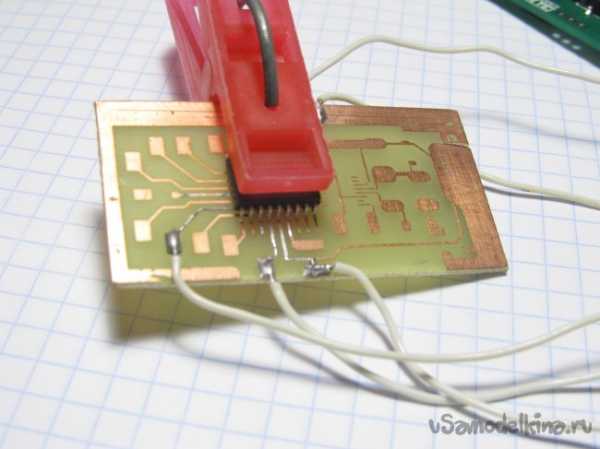
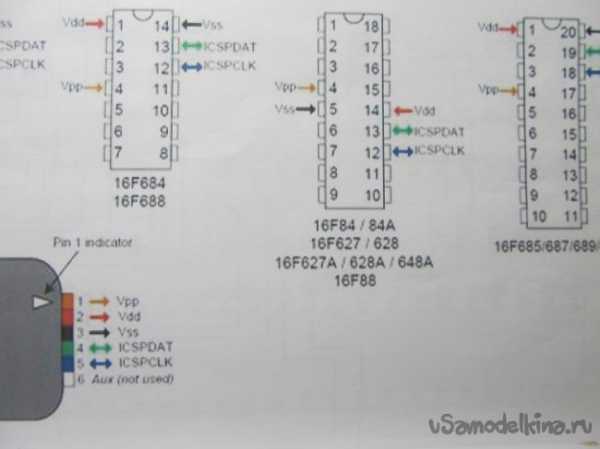
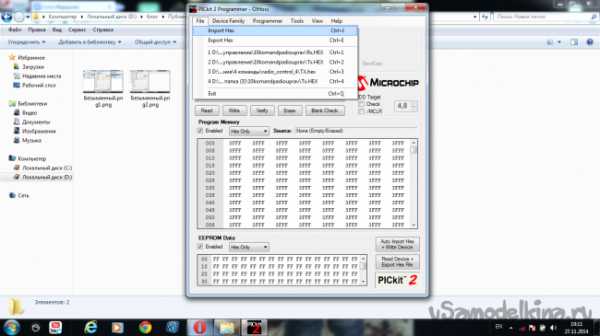
Когда все припаяно, хорошо все проверяем. Далее берем PIC16F628A, его нужно запрограммировать. Я использовал PIC KIT 2 lite и самодельную панельку


Вот схема подключения

Это все просто, так что не пугайтесь. Для тех кто далек от электроники, советую не начинать с SMD компонентов, а купить все в DIP размере. Я сам так делал в первый раз


И все это реально заработало с первого раза


Открываем программу, выбираем наш микроконтроллер

Нажимаем вставить файл с прошивкой и нажимаем WRITE

Аналогично делам и с другим микроконтроллером.
Файл TX-это для передатчика, а RX – для приемника. Главное потом не перепутать микроконтроллеры. И припаиваем микроконтроллеры на плату. После того как соберете, ни в коем случае не подключайте нагрузку сразу к плате, а то спалите все. Нагрузку к плате следует подключать через мощный транзистор как на фото

На схеме светодиоды стоят чисто для проверки работоспособности. Если у кого нету программатора тоже обращайтесь, помогу с уже прошитыми микросхемами.
Вот файлы с прошивкой Rx1.zip [1.46 Kb] (скачиваний: 2985)
Автор схемы: Blaze с форума vrtp.ru link
 Доставка новых самоделок на почту
Доставка новых самоделок на почтуПолучайте на почту подборку новых самоделок. Никакого спама, только полезные идеи!
*Заполняя форму вы соглашаетесь на обработку персональных данных
Становитесь автором сайта, публикуйте собственные статьи, описания самоделок с оплатой за текст. Подробнее здесь.usamodelkina.ru
РАДИОУПРАВЛЕНИЕ НА МИКРОКОНТРОЛЛЕРЕ
Многие хотели собрать простую схему радиоуправления, но чтоб была многофункциональна и на достаточно большое расстояние. Я все-таки эту схему собрал, потратив на неё почти месяц. На платах дорожки рисовал от руки, так как принтер не пропечатывает такие тонкие. На фотографии приемника светодиоды с не подрезанными выводами – припаял их только для демонстрации работы радиоуправления. В дальнейшем их отпаяю и соберу радиоуправляемый самолет.
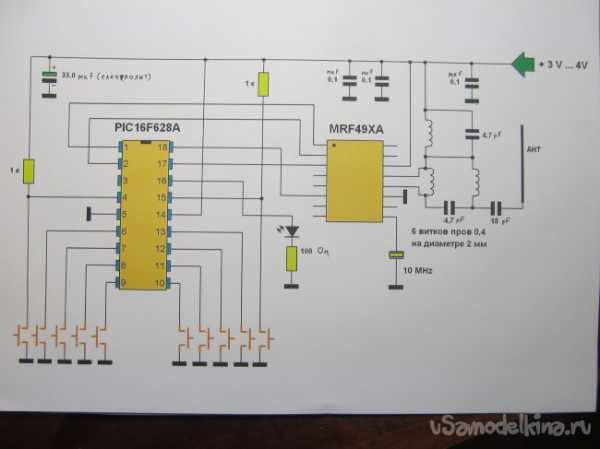
Схема аппаратуры радиоуправления состоит всего из двух микросхем: трансивера MRF49XA и микроконтроллера PIC16F628A. Детали в принципе доступные, но для меня проблемой был трансивер, пришлось через интернет заказывать. Архив с прошивкой и платой качайте здесь. Подробнеее об устройстве:
MRF49XA – малогабаритный трансивер, имеющий возможность работать в трех частотных диапазонах.
– Низкочастотный диапазон: 430,24 – 439,75 Mгц (шаг 2,5 кГц).
– Высокочастотный диапазон Б : 900,72 – 929,27 МГц (шаг 7,5 кГц).
Границы диапазонов указаны при условии применения опорного кварца частотой 10 МГц.
Принципиальная схема передатчика:

В схеме TX довольно мало деталей. И она очень стабильная, более того даже не требует настройки, работает сразу после сборки. Дистанция (согласно источнику) около 200 метров.

Теперь к приемнику. Блок RX выполнен по аналогичной схеме, различия только в светодиодах, прошивках и кнопках. Параметры 10-ти командного блока радиоуправления:
Передатчик:
Мощность – 10 мВт
Напряжение питания 2,2 – 3,8 В (согласно даташиту на м/с, на практике нормально работает до 5 вольт).
Ток, потребляемый в режиме передачи – 25 мА.
Ток покоя – 25 мкА.
Скорость данных – 1кбит/сек.
Всегда передается целое количество пакетов данных.
Модуляция – FSK.
Помехоустойчивое кодирование, передача контрольной суммы.
Приемник:
Чувствительность – 0,7 мкВ.
Напряжение питания 2,2 – 3,8 В (согласно даташиту на микросхему, на практике нормально работает до 5 вольт).
Постоянный потребляемый ток – 12 мА.
Скорость данных до 2 кбит/сек. Ограничена программно.
Модуляция – FSK.
Помехоустойчивое кодирование, подсчет контрольной суммы при приеме.

Преимущества данной схемы
– Во время подачи питания на приемник и передатчик, они уходят в тест режим на 3 секунды. В это время ничего не работает, по истечению 3-х секунд обе схемы готовы к работе.
– Кнопка (или комбинация кнопок) отпускается – соответсвующие светодиоды сразу же гаснут. Идеально подходит для радиоуправления различными игрушками – катерами, самолётами, автомобилями. Либо можно использовать, как блок дистанционного управления различными исполнительными устройствами на производстве.

На печатной плате передатчика кнопки расположены в один ряд, но я решил собрать что-то наподобии пульта на отдельной плате.

Питаются оба модуля от аккумуляторов 3,7В. У приемника, который потребляет заметно меньше тока, аккумулятор от электронной сигареты, у передатчика – от моего любимого телефона)) Схему, найденную на сайте вртп, собрал и испытал: [)еНиС
Форум по радиоуправлению
Обсудить статью РАДИОУПРАВЛЕНИЕ НА МИКРОКОНТРОЛЛЕРЕ
radioskot.ru
Делаем радиоуправление для самолета / Habr

Прочитав этот пост загорелся и я идеей склепать свой самолетик. Взял готовые чертежи, заказал у китайцев моторчики, аккумуляторы и пропеллеры. А вот радиоуправление решил сделать самостоятельно, во-первых — так интереснее, во-вторых — надо себя чем-то занять пока посылка с остальными запчастями будет ехать, ну и в третьих — появилась возможность соригинальничать и добавить всяких плюшек.
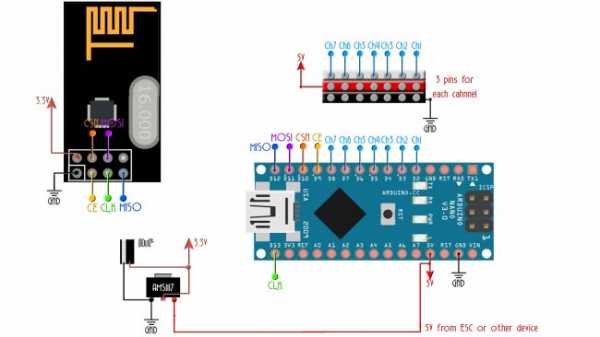
Как и чем управлять
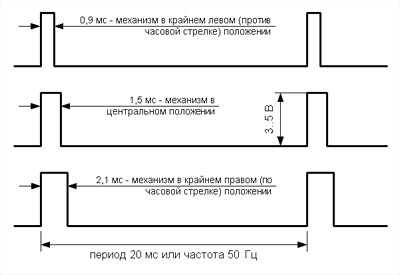
Нормальные люди берут приемник, втыкают в него сервомашинки, регулятор скорости, двигают рычажки на пульте и радуются жизни не задаваясь принципами работы и не углубляясь в подробности. В нашем случае такое не пройдет. Первой задачей стало узнать каким макаром управляются сервомашинки. Все оказывается достаточно просто, у привода есть три провода: + питания, — питания и сигнальный. На сигнальном проводе прямоугольные импульсы изменяемой скважности. Чтобы понять что это такое смотрим картинку:
Итак, если мы хотим установить привод в крайнее левое положение нужно слать импульсы длительностью 0,9мс с интервалом 20мс, если в крайнее правое — длительность 2,1мс, интервал тот же, ну со средними положениями аналогично. Как оказалось, регуляторы скорости управляются аналогично. Те, кто в теме скажут что это обычный ШИМ, который реализовать на любом микроконтроллере — плевое дело. Вот и я так решил, купил в местном магазине сервомашинку и склепал на макетке для нее так называемый сервотестер на ATtiny13. И тут оказалось, что ШИМ не совсем простой, а с подводными камнями. Как видно из вышеприведенной диаграммы, скважность (отношение длительности импульса к длительности периода) от 5% до 10% (в дальнейшем я за крайние положения принимаю импульсы длительностью 1,0мс и 2,0мс) для 256-значного ШИМ счетчика ATtiny13 это соответствует значениям от 25 до 50. Но это при условии, что на заполнение счетчика уйдет 20мс, а на деле так не получится и для частоты 9,6МГц и предделителя 1024 нужно ограничить счетчик значением 187(ТОР), в таком случае у нас получится частота 50,134Гц. В большинстве (если не во всех) сервомашинок нету точного генератора опорной частоты и поэтому частота управляющего сигнала может немного плавать. Если оставить ТОР счетчика 255, то частота управляющего сигнала будет 36,76Гц — на некоторых приводах оно будет работать (возможно с глюками), но далеко не на всех. Итак, теперь у нас 187-значный счетчик, для него 5-10% соответствуют значениям от 10 до 20 — всего 10 значений, немного дискретно получится. Если думаете поиграть с тактовой частотой и предделителем ниже привожу сравнительную табличку для 8-битного ШИМа:
Но ведь у большинства микроконтроллеров есть 16-битный (и больше) таймер для генерации ШИМ. Здесь проблема с дискретностью сразу пропадет еще и частоту можно точно выставить. Долго расписывать не буду, сразу даю табличку: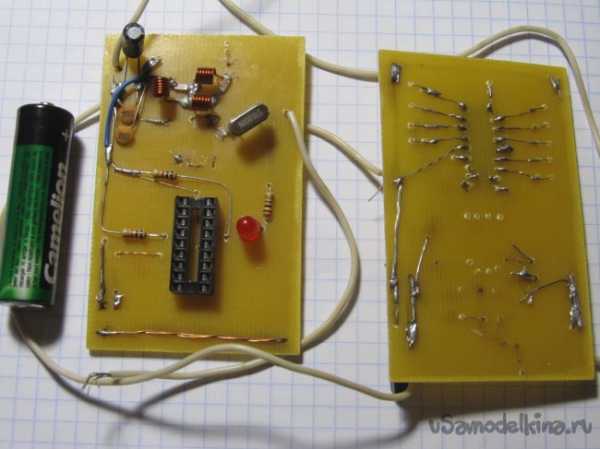
Я не думаю, что для китайской сервомашинки есть существенная разница в 600 и 1200 значений, поэтому вопрос с точностью позиционирования можно считать закрытым.
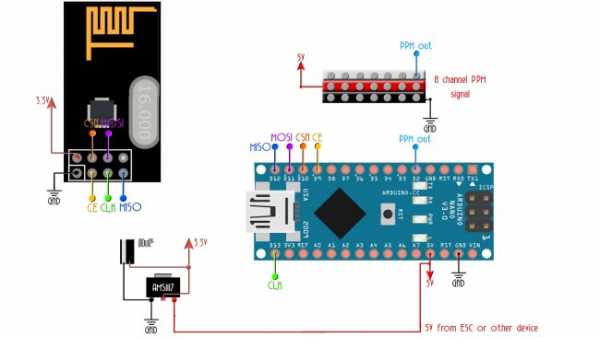
Многоканальное управление
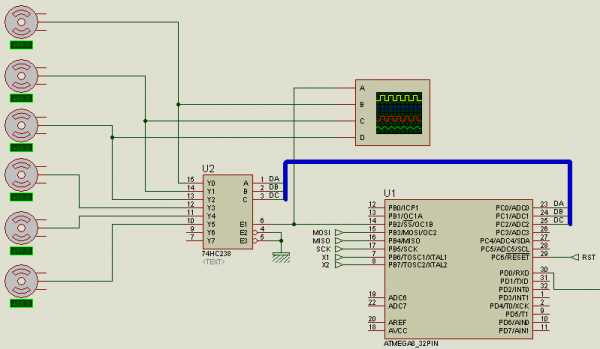
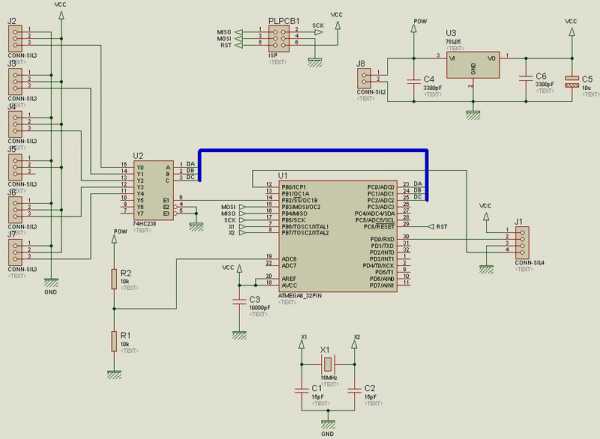
С одной сервомашинкой разобрались, но для самолета их нужно минимум три и еще регулятор скорости. Решение «в лоб» — взять микроконтроллер с четырьмя каналами 16-битного ШИМ, но такой контроллер будет стоять дорого и, скорее всего, займет много места на плате. Второй вариант — запилить программный ШИМ, но занимать процессорное время — это тоже не вариант. Если снова посмотреть на диаграммы сигнала, то 80% времени он не несет никакой информации, поэтому рациональнее было бы ШИМом задавать только сам импульс 1-2мс. Почему скважность изменяется в таких узких пределах, ведь проще было бы и формировать и считывать импульсы со скважностью хотя бы 10-90%? Зачем нужен тот неинформативный кусок сигнала занимающий 80% времени? Я заподозрил, что, возможно, эти 80% могут занимать импульсы для других исполнительных механизмов, а потом этот сигнал разделяется на несколько разных. То есть, в периоде длительностью 20мс могут уместится 10 импульсов длительностью 1-2мс, затем этот сигнал каким-то демультиплексором разделяется на 10 различных с длительностью периода как раз 20мс. Сказано — сделано, нарисовал в PROTEUS такую схемку:
В роли демультиплексора — 74HC238, на его вход E подаются импульсы с выхода микроконтроллера. Эти импульсы — ШИМ с периодом 2мс (500Гц) и скважностью 50-100%. У каждого импульса своя скважность, обозначающая состояние каждого канала. Вот так выглядит сигнал на входе Е:
Для того, чтобы 74HC238 знал на какой выход подать текущий сигнал используем PORTC микроконтроллера и входы A, B, C демультиплексора. В результате на выходах получаем такие сигналы:
Сигналы на выходе получаются правильной частоты (50Гц) и скважности (5-10%). Итак, нужно генерировать ШИМ частотой 500Гц и заполнением 50-100%, вот табличка для настройки предделителя и ТОР 16-битного счетчика:
Интересно, что возможное количество значений ШИМа ровно в 1000 раз меньше частоты таймера.
Программная реализация
Для ATmega8 с тактовой частотой 16МГц в AtmelStudio6 все реализуется следующим образом: вначале задефайним значения счетчика для крайних положений сервомашинок:
#define LOW 16000U
#define HIGH 32000U
затем инициализируем генератор ШИМа на таймере/счетчике1:
OCR1A = HIGH; //Устанавливаем ТОР
TCCR1A = 0<<COM1A1 | 0<<COM1A0 | 1<<COM1B1 | 0<<COM1B0 | 0<<FOC1A | 0<<FOC1B | 1<<WGM11 | 1<<WGM10; //Запускаем неинвертированный Fast PWM на выходе OC1B с верхним значением счетчика, которое записанно в OCR1A
TCCR1B = 0<<ICNC1 | 0<<ICES1 | 1<<WGM13 | 1<<WGM12 | 0<<CS12 | 0<<CS11 | 1<<CS10; //предделитель 1
TIMSK = 1<<OCIE1A | 1<<OCIE1B | 0<<TOIE1; //Разрешаем прерывания по совпадению
Остается реализовать прерывания:
ISR(TIMER1_COMPA_vect) //прерывание по достижению верхнего значения счетчика, непосредственно перед началом следующего импульса
{
//c_num- переменная, обозначающая номер текущего канала, channels - массив значений каналов
if (c_num <= 7)
{
OCR1B = channels[c_num];
}
else
{
OCR1B = 0; //отключаем ШИМогенератор для несуществующих в демультиплексоре 8 и 9 канала
}
}
ISR(TIMER1_COMPB_vect, ISR_NOBLOCK)// прерывание возникающее в конце импульса
{
if (c_num <= 7)
{
PORTC = c_num; //для каналов 0-7 выводим номер канала на PORTC
}
//и изменяем значение счетчика от 0 до 9
if (c_num >= 9)
{
c_num = 0;
}
else
{
c_num++;
}
}
Глобально разрешаем прерывания и готово, забивая в channels значения от LOW до HIGH изменяем значения на каналах.
Реализация в железе
Ну с теорией разобрались, пришло время все это реализовать. Мозгом системы выбран микроконтроллер ATmega8A, тактируется от кварца на 16МГц (не потому, что я захотел 16000 позиций сервомашинки, а потому, что у меня такие валялись). Управляющий сигнал для МК будет поступать через UART. В результате получилась вот такая схемка:

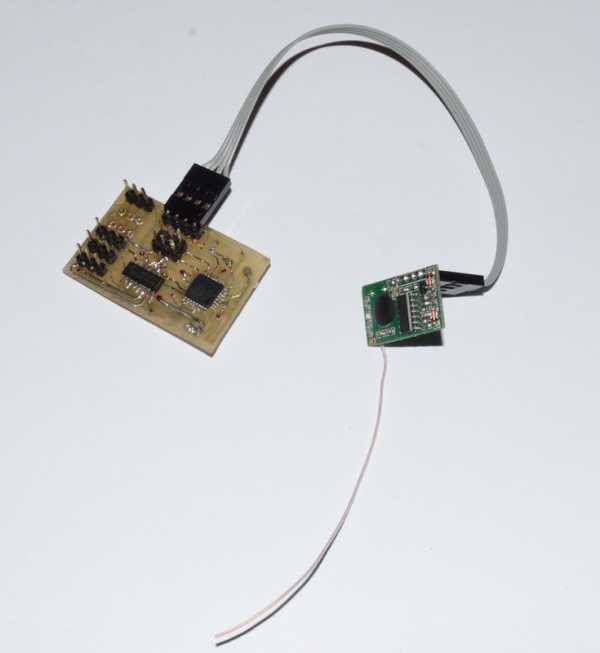
Спустя некоторое время появилась вот такая платка:

Два трехштыревых разъема я не припаял потому, что они мне не нужны, а не подряд они впаяны поскольку у меня нету металлизации отверстий, а в нижнем разъеме дорожки с двух сторон, можно было бы заменить проволочкой, но программно нету проблемы выводить сигнал на любой разъем. Также отсутствует 78L05 ибо в моем регуляторе двигателя есть встроенный стабилизатор (ВЕС).
Для получения данных к плате подключается радиомодуль HM-R868:

Изначально думал втыкать его прямо в плату, но эта конструкция не помещалась в самолетик, пришлось сделать через шлейф. Если изменить прошивку, то контакты разъема для программирования можно использовать для включения/отключения каких-нибудь системам (бортовые огни и т.п.)
Плата обошлась примерно в 20грн = $2.50, приемник — 30грн = $3,75.
Передающая часть
Самолетная часть есть, осталось разобраться с наземной аппаратурой. Как уже писалось ранее, данные передаются по UART, на каждый канал по одному байту. Вначале подключал свою систему проводом через переходник к компьютеру и команды слал через терминал. Чтобы дешифратор определял начало посылки, а в будущем выделял посылки адресуемые именно ему, вначале шлется байт-идентификатор, затем 8 байт определяющих состояние каналов. Позже стал использовать радиомодули, при отключении передатчика все моторчики начинали дико дергаться. Дабы отфильтровать сигнал от шумов, десятым байтом шлю XOR всех 9 предыдущих байт. Помогло, но слабо, добавил еще проверку на таймаут между байтами, если он превышается — вся посылка игнорится и прием начинается заново, с ожидания байта-идентификатора. С добавлением контрольной суммы в виде XOR слать команды с терминала стало напряжным, поэтому я побыстрому наклепал вот такую программку с ползунками:

Число в нижнем левом углу — контрольная сумма. Передвигая ползунки на компе двигались рули на самолете! Вообщем отладил я все это и стал думать о пульте ДУ, купил для него вот такие джойстики:
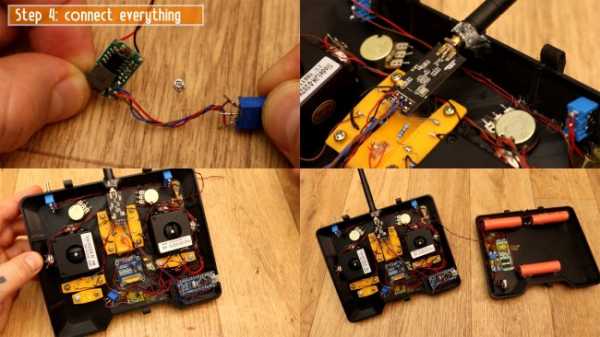
Но потом меня посетила одна мысль. В свое время я тащился от всяких авиасимуляторов: «Ил-2 Штурмовик», «Lock On», «MSFSX», «Ка-50 Черная Акула» и др. Соответственно был у меня джойстик Genius F-23 и решил я прикрутить его к вышеописанной проге с ползунками. Погуглил как это реализовать, нашел этот пост и получилось! Управлять самолетиком с помощью полноценного джойстика, мне кажется, гораздо круче, чем маленькой палочкой на пульте. Вообщем все вместе изображено на первой фотке — это нетбук, джойстик, преобразователь на FT232, и подключенный к нему передатчик HM-T868. Преобразователь подключается 2м кабелем от принтера, что позволяет закрепить его на каком нибудь дереве или чем-то подобном.
Пуск!
Итак, есть самолетик, есть радиоуправление — Поехали!(с) Первый полет производился над асфальтом, результат — сломанный пополам фюзеляж и полувырванный двигатель. Второй полет производился над более мягкой поверхностью:
Последующие полетов 10 были тоже не особо удачными. Основной причиной я считаю сильную дискретность джойстика — по крену он выдавал только 16 значений (вместо возможных 256), с осью тангажа — не лучше. Но так как в результате испытаний самолет был значительно поврежден и не подлежит ремонту:
— проверить правдивость этой версии пока не представляется возможным. В пользу этой версии говорит и зафиксированная на видео попытка выровнять самолет — он летит накрененным, а потом резко заваливается в противоположную сторону (а должен плавно). Вот более наглядное видео:
Дальность действия аппаратуры — примерно 80м, дальше тоже ловит, но через раз.
Ну вот и все, благодарю за внимание. Надеюсь, приведенная информация окажется для кого-то полезной. Буду рад ответить на все вопросы.
В архиве схема и разводка платы для Протеуса.
habr.com
Простейшее радиоуправление. Специально для начинающих.
Простейшее радиоуправление. Специально для начинающих.
Решил сделать схемы которые делал в детстве и они у меня не получились и описать свои ошибки. Тогда я никак не мог понять почему я передатчиком посылаю одни команды, а приемником если и принимаю, со совсем что то непохожее. Сейчас я конечно знаю почему у меня так получалось, но в виду излишка свободного времени решил все это сделать в железе как тогда в детстве. Ностальгия наверное. Для начала взял самые простейшие схемы, Тем более форум просто забит вопросами «Как сделать радиоуправление на одну команду».
Когда начинал писать, то думал, что постепенно дойду и до сложных постепенно усложняя приемную и передающую часть., т.к. в каждом конкретном случае возникают проблемы совершенно разные. К примеру вместо сверхрегенератора применить для радиоуправления простую и дешевую микросхему TDA7000 или TDA7021.
Подход в этом случае будет немного другой, т.к. там будут действовать другие дестабилизирующие факторы. Конечно для профессионалов эта идея покажется смешной, но для начинающих в качестве первой конструкции по моему самое то и поняв общие принципы можно уже с понятием делать на специализированных микросхемах.
На TDA7000(70221) по моему и схема и настройка будет еще проще. В ней, при её простоте заложено довольно много возможностей для целей радиоуправления.
К сожалению статья моя раздулась до безобразия, а я успел только про примитивные сверхрегенераторы на 27 мгц написать, поэтому я ими и закончил
Понятно подходы выделения полезного сигнала при радиоуправлении различны для разных приемных и передающих систем. У каждой системы есть свои особенности.
Даже если взять тот же сверхрегенератор, но частоту взять раз в десять больше, то одно проблемы отпадут, но появятся новые.
К сожалению в этой статье до этого не дошел, хотя сам передатчик и приемник сверхрегенератор на частоту 225 мгц сделал.
На этих частотах обработка сигнала и его выделение проще, но труднее сама аппаратура, но при этом открываются большие возможности в конструировании малогабаритной аппаратуры радиоуправления на большие расстояния..
Вот даже моя примитивная система на 225 мгц работает в пределах квартиры без всяких антенн. Частоту взял именно эту просто из за того, что вытащил кварц на 25 мгц из старой сетевой карточки и сделал на его основе передатчик. Справа там просто мультивибратор на логике, что бы сигнал передатчика промодулировать.
А это приемник сверхрегенератор на частоту 225 мгц.
Монтаж на пятачках. Считаю, что для макетов идеальный способ. Расположение пятачком делается в процессе монтажа и заранее неизвестно. Прочитать об этом способе можно в книге С.Г. Жутяев «Любительская УКВ радиостанция»
https://www.cqham.ru/ftp/1-29.djvu
С этим все. Начинаю со сверхрегенераторами на 27 мгц, а там как получится.
Понятно, что сначала нужно было сделать простейший маломощный передатчик – маячек для моих экспериментов. Схему сделал для данных целей самую примитивную. Сделал на трех транзисторах. Генератор на 27 мгц и мультивибратор на микросхеме. В дальнейшем этот мультивибратор для однокомандной апппаратуры будет лишний. Его приделал только для настройки. Питание 4,5 вольта.
Как говорил, схема сверхрегенератора классическая. Катушка такая же, как и в передатчике. Транзистор КТ315Б
Подключил к УНЧ и антенну длиной 15 см. Покрутил R2 и добился шумов суперизации.
Взял книжку книжку Г. Миль «Электронное дистанционное управление моделями» Подцепил осциллограф к точке «1» на схеме и как подозревал картинка моя было и близко на эту не похожа.
Что я только не крутил, но они форму менять не хотели или их уровень поднимался выше от нулевой линии, что тоже уменьшало чувствительность.
Дроссель в эмиттере у меня был самодельный. Намотано 50 витков провода на резисторе 100 ком. От отчаяния взял и поставил фабричный дроссель ДПМ-01 и произошло чудо. Осциллограмма сразу приняла приличный вид и чувствительность улучшилась.
Стал экспериментировать с самодельными дросселями. Во всяком случае на 27 мгц наиболее близким к этому оказался намотанный на ферритовом кольце дроссель диаметром 10 мм. Витков 35. Тип феррита не знаю. Взял случайный. Дальше эксперименты прекратил, но понял, что дроссель в сверхрегенераторе очень важная часть и никогда его не нужно как иногда рекомендуют мотать просто на резисторе.
Настала пока делать однокомандную управление. В теории все просто выглядит. Когда несущей нет, то сверхрегенератор сильно шумит. Этот шум нудно выпрямить и использовать как команду. Если подать просто несущую, т.е. включить передатчик без модуляции, то эти шумы пропадают. После детектора получается ноль, а это равносильно подаче команды. Эта система привлекает тем, что когда передатчик отключен, то на выходе приемника нет ложных команд. Шумит он и шумит.
Вот и у Г. Миля об этом написано.
Такая привлекательная простая схема. Жалко, что на практике она очень нестабильно работает. Так и у меня в те годы получилось и решил я её добить. Может кому пригодится. Дело в том, что на выходе сверхрегенератора присутствует переменное напряжение суперизации, как видели оно порядка единиц вольт, хотя и частота у него намного больше напряжения шумов, но величина шумов всего лишь несколько милливольт и эффективно отделить их очень затруднительно. Конечно идеальный случай поставить НЧ трансформатор или ФНЧ на LС элементах, но лень мотать тысячи витков. Хотя в давние времена люди были не такие ленивые и мотали такое.
Здесь нужно заметить, что если сверхрегенератор использовать для приема голоса, то сильное подавление частоты суперизации можно не делать. Просто не нужно будет подавать на УНЧ сильный сигнал, что бы не загонять его в режим отсечки этим напряжением суперизации. В нашем случае это напряжение нужно убрать как можно сильнее. На выходе сверхрегенератора стоит примитивный фильтр НЧ на R5, С7 но все, на что он способен, так получить на его выходе вот такое с амплитудой порядка 0,2 вольта, а шумов при таком на экране осциллографа еще и не видим, хотя они там точно есть. Амплитуда этих шумов совсем мала. Это картинка в точке «2»
Если присмотреться, то наши шумы чуть видны в верхней части этих импульсов.
При таком безобразии приемник будет реагировать не на шумы, а на эти импульсы.
Т.к. ни LC фильтр мне не хочется, ни трансформатор ставить, то остается единственны путь, это поставить активный RС фильтр с частотой среза в несколько килогерц.
Взял опять на транзисторе. После фильтра поставил усилитель с маленьким выходным сопротивлением и получил основной блок для дальнейших экспериментов.
Если теперь посмотреть сигнал в точке «3» при отсутствии несущей, то видим только шум сверхрегенератора приличной амплитуды. Он то и является в нашем случае сигналом команды.
Кстати макет базового блока так выглядит. Виден монтаж на пятачках. Конструкция довольно жесткая. Можно спокойно её бросать и ничего с ней не будет. Все сделано на выводах деталей обрезанных до размера 1 – 2 мм
Единственно желательно сердечник катушки закрепить.
Теперь имея базовый блок делаем для начала простейшее однокомандное управление.
Принцип простой. Шумы уже выделили. Теперь их усилим, продетектируем, подадим на триггер Шмита и дальше на силовой ключ. Если передатчик не включен, то светодиод горит. При включении передатчика шумы пропадают и светодиод гаснет. Если нужно другая логика, то нужно добавить еще один ключ или вместо светодиода поставить реле, но это уже нюансы.
Это макет однокомандного управления так выглядит.
Передатчик для него до безобразия просто выглядит. Просто генератор на кварце 9 мгц работающий на третьей механической гармонике. Его просто включают или выключают.
В принципе можно сделать и без кварца. Для увеличения мощности в генераторе поставил два транзистора КТ315 в параллель, что тоже необязательно. Можно один или что то мощнее, например КТ603 или КТ3117
А это полная схема. Вверху базовый блок, снизу дешифратор команды.
Деталей получилось довольно много, но это компенсируется простотой и наглядностью настройки, где каждый каскад выполняет одну определенную функцию.
Теперь, как и задумал элементарные принципы передачи нескольких команд. Я взял две команды, хотя по этому принципу можно сделать порядка четырех.
Принцип частотного разделения каналов. Принцип широко известен. Правда для разделения каналов в аналоговых системах обычно применяют избирательные LС фильтры, но это не для ленивых, а коты как известно здорово ленивые.
Вот здесь схема с катушками из книги Г. Миля.
Поэтому фильтры решил взять активные на RС. Схем много перепробовал, но не понравились. Больше понравился фильтр Мюллера Фогта. О нем тоже в книге Г. Миля написано.
Базовый блок прежний, только после него вместо усилителя и триггера Шмита пришлось поставить усилитель-ограничитель, т.к. случались ложные срабатывания когда передатчик расположен близко от приемника. Было одновременное срабатывание двух соседних каналов. Когда поставил ограничитель и ограничил величину сигнала поступающих на фильтры, этот дефект пропал.
И наконец полная схема вместе с фильтрами и выходными ключами. Частоты я брал случайные. Первая получилась 1200 гц, вторая 750 гц. Желательно, что бы они не делились на целое число и не создавали в тракте гармоники, т.е. выбор 1200 гц и 600 гц был бы совсем не удачен в данном случае.
Само собой схемы фильтров можно взять и другие, но мне эти понравились.
А это внешний вид макета.
Теперь к передатчику можно переходить. Схема стандартная. Задающий генератор на кварце 9 мгц. Кварц работает на третьей механической гармонике. Дальше идет апериодический буферный каскад в котором происходит также модуляция. Подобная схема модуляции позволяет сделать большую скорость передачи, хотя требует дополнительного каскада. Выходной каскад самый примитивный. Если в нем предусмотреть цепи согласования с антенной, то параметры его конечно улучшаться. Так же можно в оконечном каскаде поставить и более мощный транзистор, хотя бы КТ603, но у меня не было этих целей. Я начал антенну согласовывать, но бросил, т.к. дальности для моих экспериментов и так хватало, а так при желании мощность его можно существенно увеличить особо не раздувая габаритов.
Модулятор по сути два мультивибратора работающих на разных частотах.
На схеме все понятно. Включаем или один мультивибратор или другой.
Там резистор R17 можно подобрать для увеличения мощности, но я не стал. Мне большая мощность не нужна была для экспериментов.
А это макет передатчика с которым я экспериментировал. Система само собой полностью работоспособная. Там видна спиральная антенна и удлиняющая катушка. Окончательно я её не настроил, т.к. большой дальности не преследовал на данном этапе своих экспериментов.
Все!
Силы мои иссякли, да и по опыту знаю, что чем длиннее статья, тем меньше охотников дочитать её до конца. Хотел сделать еще дистанционный аналоговый термометр, но выдохся. Просто на входе модуляции передатчика поставить генератор управляемый напряжением, а в качестве дешифратора приемника поставить преобразователь частота-напряжение. Такие ставили в аналоговых частотомерах.
В заключение хочу сказать, что конечно вместо примитивных шифраторов и дешифраторов на транзисторах здесь можно поставить более совершенные шифраторы и дешифраторы на логике или на МК в которых предусмотреть дополнительно свою систему зашиты достоверности информации дополнительно к этой, хотя не вижу смысла делать такое к таким примитивным передатчикам и приемникам.
Файлы:
11.png
Все вопросы в Форум.
www.radiokot.ru
Радиоуправление моделями схема
?Самые любимые и вместе с тем трудновыполнимые электронные игрушки для юных радиолюбителей.
Управление моделями по радио
?Статья представляет собой цикл публикаций по конструированию и работе аппаратуры управления по радио электромеханическими игрушками и моделями.
Выбор модели и системы управления
?Существуют несколько систем радиосвязи, которые можно применить для телеуправления. Не все мы будем рассматривать, да и не все нам подойдут. Сначала необходимо определиться с будущей системой радиоуправления. Да и с выбором конкретной модели электромеханической игрушки желательно определиться сразу же, чтобы потом не мучиться с проблемой размещения электроники во внутренности автомодели.

Передатчик
?Редкое исключение из правила, когда передатчик системы связи проще приемника. Здесь это так, поэтому начнем знакомство телеуправления с изготовления передатчика, который на поверку оказывается достаточно универсальным и подходит для различных моделей управления.



Однокомандное приемное устройство
?Вот и настала очередь приемника для системы радиоуправления моделями. В простейшем случае это однокомандное устройство, функции которого вполне достаточно, чтобы модель двигалась и поворачивала, хоть только и в одну сторону.

Двухканальное четырехкомандное приемное устройство
?Более сложный вариант приемного устройства системы телеуправления моделями по радио. Название говорит само за себя: аппаратура позволяет игрушке выполнять четыре команды, обеспечивая весь спектр движения по плоскости.


Выбор модели дискретно-пропорционального управления
?Более сложная система телеуправления моделями — дискретно-пропорциональная, которая позволяет кардинально улучшить управляемость игрушкой. Но и проблема выбора модели тоже усложняется: она должна быть совместима с принципом системы радиоуправления.


Передатчик для управления летающими моделями
?Управление летающими моделями (самолетами) очень увлекательное занятие для детворы. До сих пор где-нибудь проводятся соревнования по боям на кордовых моделях. А вот модель, оборудованная радиосистемой телеуправления — вообще предел мечтаний любого мальчишки. В предлагаемой статье рассказывается о том, как из дискретно-пропорциональной аппаратуры сделать двухканальную систему управления летающими моделями.


radio-shema.ru
Пульт радиоуправления моделями своими руками / Habr
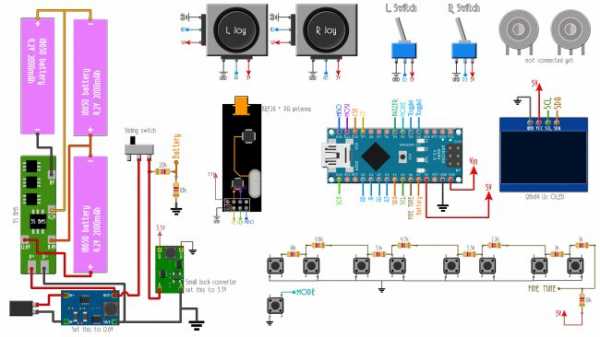
Всем привет. Представляю на общее обозрение самодельный пульт радиоуправления для управления различными объектами на расстоянии. Это может быть машинка, танк, катер и т.д. изготовленное мной для “детского” радио кружка. С применением радио модуля NRF24L01 и микроконтроллера ATMEGA16.
Давно у меня лежала коробка одинаковых поломанных игровых джойстиков от приставок. Досталась от игрового заведения. Особого применения в неисправных игровых джойстиках я не видел, да и выкидывать или разбирать жалко. Вот и стояла коробка мертвым грузом пылилась. Идея применения игровых джойстиков, пришла, как только пообщался со своим приятелем. Приятель вел кружок для юных радиолюбителей в интернате, причем бесплатно по выходным, приобщал любознательных детишек к миру радиоэлектроники. Дети они ведь как губка, впитывают информацию. Так как я сам очень приветствую подобные кружки для детей, а тут еще и в таком месте. То и предложил идею, как задействовать нерабочие джойстики. Идея заключалась в следующем: создать самодельный радио дистанционный пульт управления моделями, собранными своими руками, который хотелось бы предложить детям для изучения проекта. Идея ему очень понравилась, учитывая, что финансирование детских учреждений мягко сказать не очень, да и мне был интересен данный проект. Пускай я тоже внесу свою лепту в развитие радио кружка.
Цель проекта создать законченное устройство не только как радио дистанционный пульт, но и ответную часть на радиоуправляемый объект. Учитывая, что пульт для детей то и подключение приёмной части на модель, также должно быть по возможности простым.
Сборка и комплектующие:

Разобрав игровой джойстик на составляющие, сразу стало ясно, нужно изготовить новую печатную плату, причем, весьма необычной формы. Сначала, хотел развести печатную плату на микроконтроллер ATMEGA48, но как оказалось портов микроконтроллера просто не хватает под все кнопки. Конечно, такое количество кнопок в принципе не нужно и можно было ограничиться только четырьмя портами микроконтроллера АЦП для двух джойстиков и два порта для тактовых кнопок, размещенных на джойстиках. Но мне захотелось по возможности максимально большое количество кнопок задействовать, кто знает, чего там детишки ещё захотят добавить. Так была рождена печатная плата под микроконтроллер ATMEGA16. Сами микроконтроллеры у меня были в наличии, остались от какого-то проекта.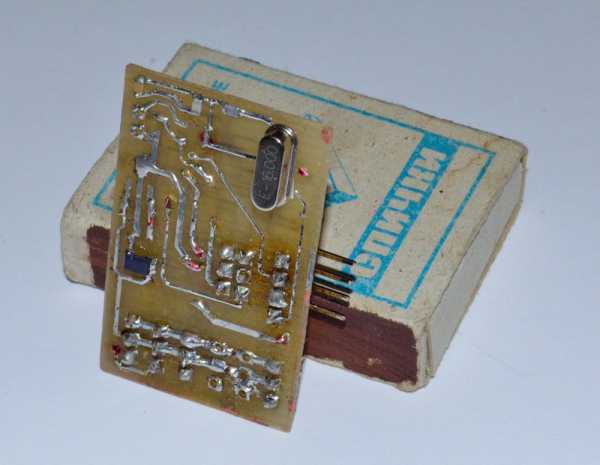
Резинки на кнопках очень сильно были изношены, и восстановлению не подлежали. Но это не удивительно учитывая, где джойстики использовались. По этой причине применил тактовые кнопки. Пожалуй, к минусам тактовых кнопок можно отнести сильное щелканье, возникавшие в результате нажатия на кнопку. Но для данного проекта это весьма терпимо.
Плату с джойстиками не пришлось переделывать, оставил какая есть, что значительно сэкономило времени. Торцевые кнопки также сохранил в первоначальном виде.
В качестве приемопередатчика выбрал радиомодуль NRF24L01, так как цена весьма мала в Китае по цене 0.60$ за шт. купил. Несмотря на свою малую стоимость, радиомодуль обладает не малыми возможностями и конечно мне подходил. Следующей проблемой, с которой столкнулся, а собственно где радиомодуль разместить. Пространство в корпусе свободного маловато, по этой причине радио модуль разместил в одной из ручек корпуса джойстика. Даже фиксировать не пришлось, модуль плотно прижимался, когда собирался полностью корпус.
Пожалуй, самой большой проблемой стал вопрос с питанием для радио пульта. Покупка каких-то специализированных аккумуляторов, скажем литиевых, влетало в немалую копеечку, так как собирать решено было семь комплектов. Да и оставшееся свободное пространство в корпусе не очень позволяло использовать стандартные аккумуляторы серии AA. Хотя потребление и не значительное можно использовать разные подходящие источники питания. Как всегда, на помощь пришла дружба, коллега на работе подогнал аккумуляторы литиевые плоские от мобильных телефонов и бонусом зарядки к ним. Все же немного пришлось переделать их, но это незначительно и гораздо лучше, чем делать с нуля зарядку для аккумуляторов. Вот на плоских литиевых аккумуляторах я и остановился.
В процессе испытания радио модуль, свою заявленную дальность оправдал и уверенно работал по прямой видимости на расстоянии 50 метров, через стены дальность значительно уменьшилась. Также было в планах установить вибромотор, который реагировал, скажем на какие-то столкновения или другие действия в радиоуправляемой модели. В связи с этим предусмотрел на печатной плате транзисторный ключ для управления. Но дополнительные усложнения я оставил на потом сначала нужно обкатать программу, так как она ещё сыровата. Да и конструкция, учитывая, что это прототип требует мелких доработок. Вот так как говорится “с миру по нитке”, практически с минимальными вложениями был создан пульт радиоуправление.
Печатная плата — atmel-programme.clan.su/pultdzhostik.rar
Радиомодули брал тут — alipromo.com/redirect/cpa/o/rhc8f0n1hlzfodwgihmb8nwr9wx53k5g
habr.com
схемы и конструкции своими руками
Схемы и конструкции радиоуправления, которые несложно собрать своими руками. Литература по системам радиоуправления
– аналоговые схемы радиоуправления;
– разработки на микросхемах;
– схемы радиоуправления на микроконтроллерах;
– готовые модули приемник – передатчик;
– самодельные модули приемник – передатчик;
– применяемые антенны;
– вопросы настройки самодельных модулей
– и многое другое, что связано с радиоуправлением.
1. Четырехкомандная система радиоуправления
2. Передатчик радиоуправления на микросхеме
3. Передатчик и приемник системы радиоуправления
4. Модуль передатчика радиоуправления на цифровой микросхеме
Подборка статей Владимира Днищенко для конструкторов аппаратуры радиоуправления:
Основные принципы пропорционального радиоуправления моделями (1.1 MiB, 8,953 hits)
Формирователи команд для аппаратуры пропорционального управления (805.3 KiB, 4,606 hits)
Рулевые машинки для аппаратуры пропорционального управления (1.1 MiB, 5,965 hits)
Радиоканал для аппаратуры пропорционального радиоуправления (1.5 MiB, 4,001 hits)
Радиоканал на транзисторах для аппаратуры пропорционального радиоуправления (1.2 MiB, 4,133 hits)
Аппаратура пропорционального радиоуправления (8.9 MiB, 5,016 hits)
ПРиемник прямого преобразования на интегральной микросхеме (693.2 KiB, 3,620 hits)
Простой супергетеродин для аппаратуры радиоуправления (764.0 KiB, 3,758 hits)
Радиоканал с частотной модуляцией для аппаратуры радиоуправления (752.1 KiB, 4,271 hits)
Книга Владимира Днищенко для конструкторов аппаратуры радиоуправления:
Дистанционное управление моделями (3.2 MiB, 6,556 hits)
radio-stv.ru
