Принцип работы ПИД-регуляторов
MaxPlant
Принцип работы
Регуляторы процесса
Регуляторы процесса (Process Controllers) – это параметрируемые цифровые контроллеры со встроенным набором стандартных функций для регулирования технологических переменных (температуры, давления и т.п.).
В качестве сигналов задания (Reference) могут использоваться как фиксированные уставки (Fixed Setpoints), так и внешние (External).
Аналоговые входы используются для подключения датчиков обратной связи (термометров сопротивления, термопар, манометров и т.п.).
Дискретные входы используются для задания фиксированных уставок и переключения между режимами.
Дискретные выходы используются для сигнализации: готовности, аварий, состояния.
Релейные выходы используются для дискретного управления, а аналоговые выходы – для непрерывного управления.
Дискретное управление
- 2-х позиционный регулятор использует только 2 состояния:
- включено (открыто)
- выключено (закрыто) Пример: управление нагреванием или охлаждением.
- 3-х позиционный регулятор использует 3 состояния:
- выключено
- вращение по часовой стрелке
- вращение против часовой стрелки (реверс) Пример: управление реверсивным электродвигателем.
- 5-и позиционный регулятор использует 5 состояний:
- выключено
- вращение на первой скорости по часовой стрелке
- вращение на второй скорости по часовой стрелке
- вращение на первой скорости против часовой стрелки
- вращение на второй скорости против часовой стрелки Пример: управление 2-скоростным реверсивным двигателем.
Непрерывное управление
Для непрерывного управления используются ПИД-регуляторы.
Возможна реализация каскадного (подчинённого) управления.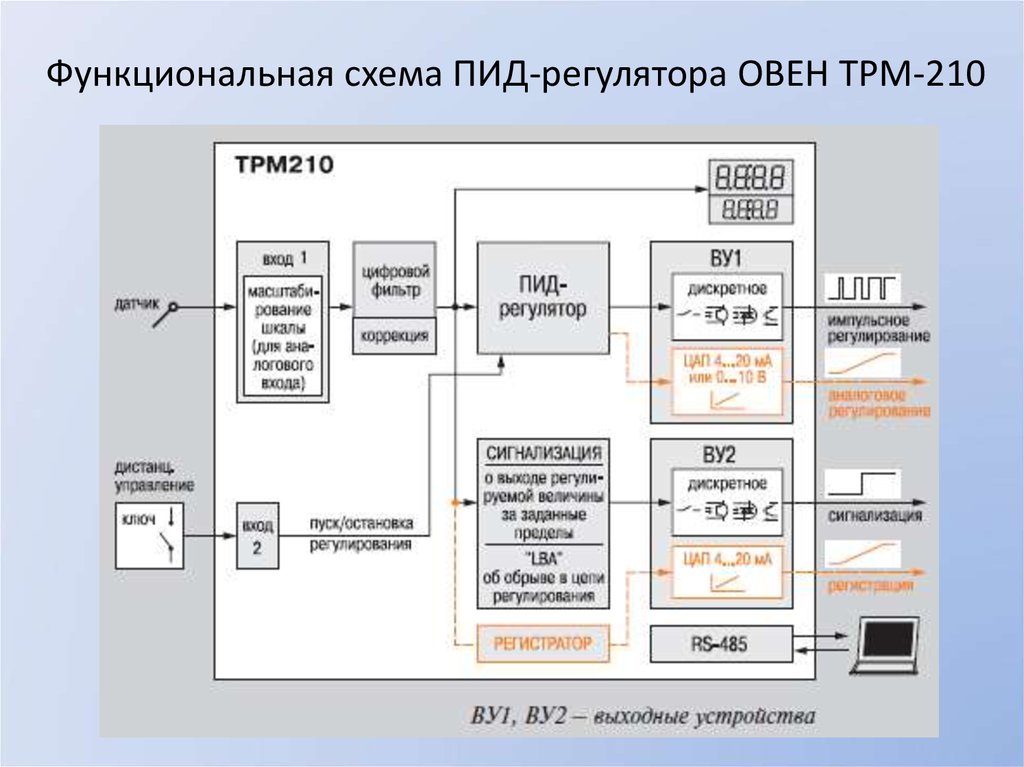
Замкнутая система управления
Переходный процесс
Переходный процесс – это реакция системы на внешнее воздействие (задание, возмущение).
Неустойчивый (расходящийся) переходный процесс
Устойчивый (сходящийся) переходный процесс
| Колебательный | Апериодический | Монотонный |
ПИД-регулятор
С помощью настройки ПИД-регулятора (PID-controller) мы можем скорректировать переходный процесс так, как нам нужно для решения своей задачи.
Хзад – заданное (желаемое) значение выходной переменной
Xmax – верхний допустимый предел выходной переменной
Xmin – нижний допустимый предел выходной переменной
Т – период колебаний
Тн – время нарастания
Тр – время переходного процесса (последняя точка пересечения кривой с X
А1 – первое перерегулирование
А2 – второе перерегулирование
d=А1/A2 – степень (декремент) затухания переходного процесса (отношение первого перерегулирования ко второму)
Рассогласование, перерегулирование, время нарастания, время переходного процесса, степень
затухания характеризуют качество регулирования.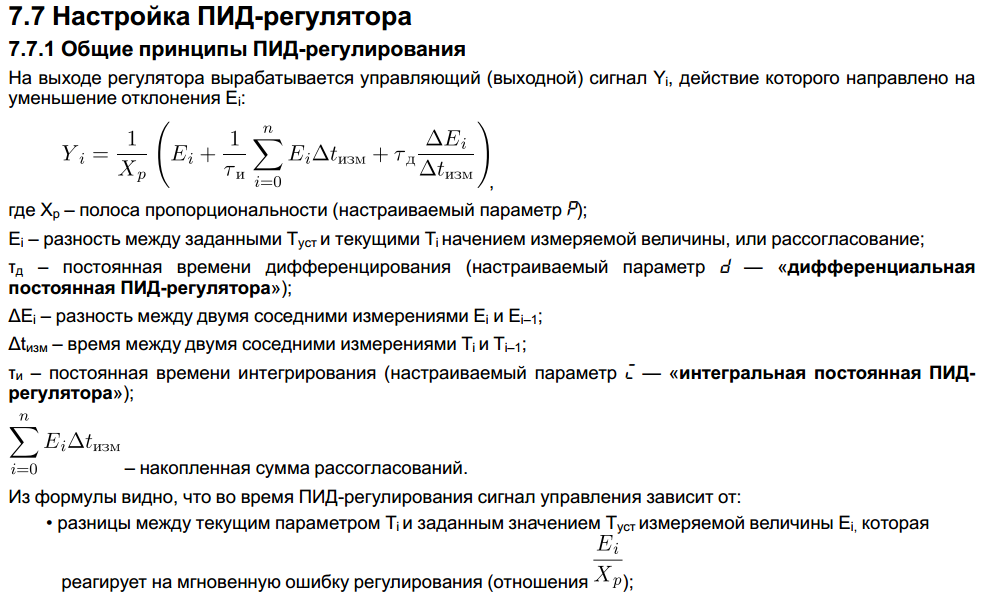
Пример
ПИД-регулятор открывает и закрывает регулирующий вентиль на горячей трубе так, чтобы из крана текла вода с температурой +40°С с погрешностью плюс-минус 2 градуса. Регулятор вычисляет рассогласование (ошибку) – отклонение реальной температуры (например, +20°С) от заданного значения (+40°С) и решает – когда и насколько необходимо приоткрыть горячий вентиль, чтобы температура повысилась на 20С. Реальную (фактическую) температуру регулятор узнаёт с помощью датчика температуры (обратная связь), а заданную температуру (уставку) ему сообщает оператор, например, набирая число «40» на своём ПК.
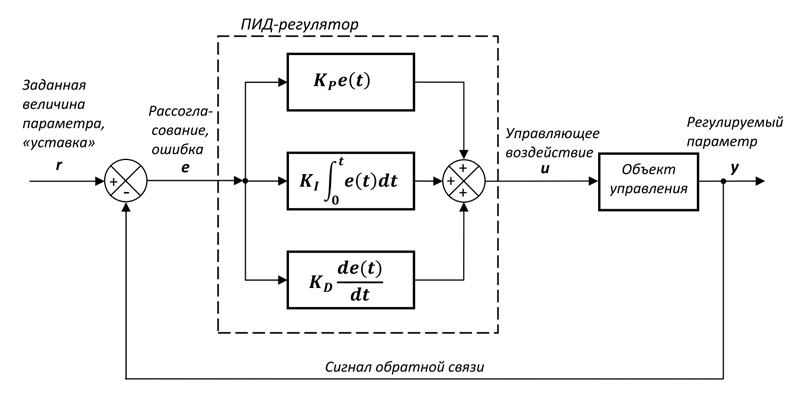
Чтобы настроить ПИД-регулятор, необходимо подобрать правильную комбинацию трёх коэффициентов:
- Пропорционального – Kp
- Интегрального – Ki
- Дифференциального – Kd
Могут использоваться и более простые – П и ПИ-регуляторы.
Формула ПИД-регулятора
где e(t) – ошибка (рассогласование), u(t) – выходной сигнал регулятора (управляющее воздействие).
Чем больше Пропорциональный коэффициент, тем выше быстродействие, но меньше запас устойчивости. Но! простой П-регулятор не может полностью отработать рассогласование, т.е. всегда работает с ошибкой.
ПИ-регулятор позволяет избавиться от статической (установившейся) ошибки, но, чем больше Интегральный коэффициент, тем больше перерегулирование (динамическая ошибка).
ПИД-регулятор позволяет нам уменьшить перерегулирование, но, чем больше Дифференциальный коэффициент, тем больше погрешность из-за влияния шумов.
Если шумы идут по каналу обратной связи, то мы можем их отфильтровать с помощью фильтра низкой частоты, но чем больше постоянная этого фильтра, тем медленнее регулятор будет отрабатывать возмущения.
Настройка ПИД-регулятора по методу Циглера-Николса
Циглер и Николс предложили свой вариант быстрой настройки ПИД-регулятора для периодического переходного процесса,
в котором затухание примерно равно 4.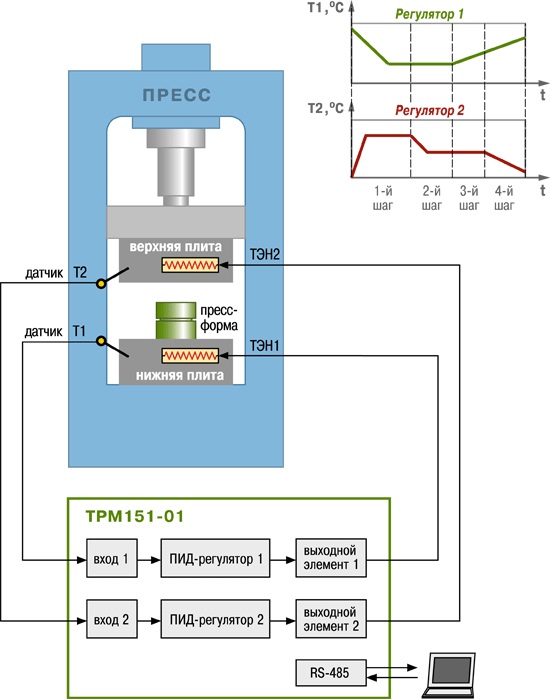
- Обнуляем Ki и Kd
- Постепенно увеличиваем Kp до критического значения Kc, при котором возникают автоколебания
- Измеряем период автоколебаний Т
- Вычисляем значения Kp, Ki и Kd по разным формулам для разных регуляторов:
- для П-регулятора: Kp=0,50*Kc
- для ПИ-регулятора: Kp=0,45*Kc, Ki=1,2*Kp/T
- для ПИД-регулятора: Kp=0,60*Kc, Ki=2,0*Kp/T, Kd=Kp*T/8
Каскадный регулятор (подчинённое управление)
Продолжение примера
Теперь нам захотелось добавить комфорта и сделать так, чтобы уставка задания температуры воды менялась
в зависимости от температуры воздуха на улице (на улице мороз – вода горячая, на улице жара – вода прохладная).
Можно установить ещё один регулятор комфортной температуры, который по показаниям термометра узнаёт
фактическую температура наружного воздуха и решает, что комфортная температура воды должна быть, например, +40°С,
поэтому он выдаёт задание регулятору температуры воды – поддерживать температуру на уровне +40С (см.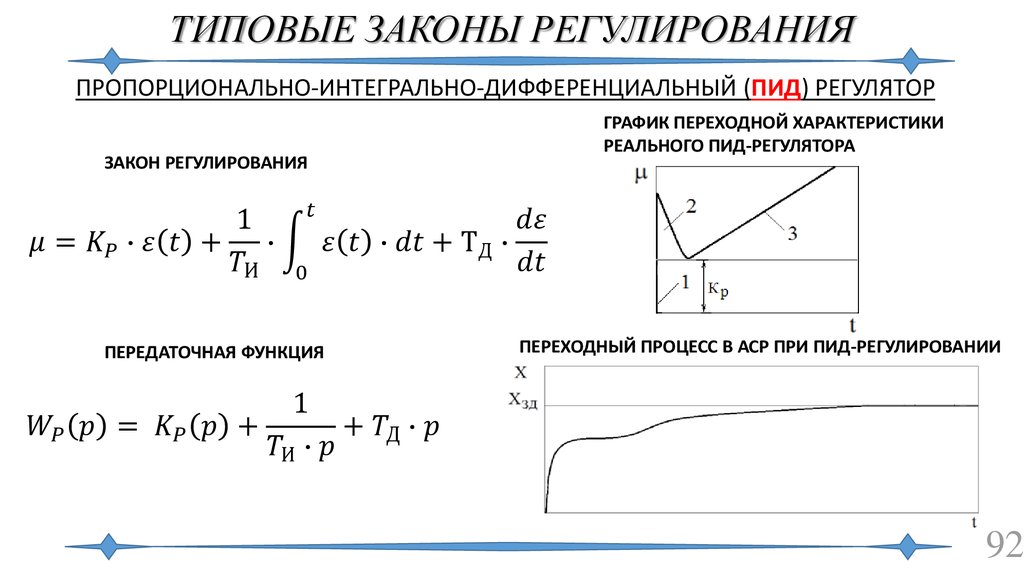
С помощью регуляторов процесса мы можем реализовать и более сложные связи. Например, поддерживать постоянный расход и температуру воды, независимо от давления и температуры горячего и холодного трубопроводов.
Упреждающее регулирование (Feedforward Control)
Не всегда простой ПИД-регулятор в системе с обратной связью может обеспечить требуемое быстродействие из-за возникновения нежелательных колебаний или недопустимо большого перерегулирования. Для улучшения характеристик регулирования применяют комбинированное управление
– с обратной связью (closed-loop) и без обратной связи (open-loop). К управляющему воздействию (выходу регулятора) добавляется сигнал упреждающего воздействия, который не зависит от рассогласования, а значит, не может вызвать автоколебания в системе.
Продолжение примера
Если мы доверяем прогнозу погоды, то вместо каскадного управления мы можем реализовать упреждающее регулирование без измерения уличной температуры: читаем прогноз на завтра, задаём уставку +40°С по таймеру времени на завтра на 7 утра.Если измерить возмущение, то можно подать упреждающее воздействие, которое компенсирует влияние этого возмущения на процесс до того, как начнёт изменяться регулируемый параметр.
Как выбрать
Окружающая среда
- Температура
- Влажность
- Класс взрывозащиты
- Степень защиты корпуса.
Регулирование
- Тип регулятора
- Дискретный
- 2-х позиционный
- 3-х позиционный
- Непрерывный
- П-регулятор
- ПИ-регулятор
- ПИД-регулятор.
- Дополнительные функции:
- Каскадный регулятор (подчинённое управление)
- Упреждающее регулирование (Feedforward Control).
- Количество контуров регулирования.
Коммуникационный интерфейс
- HART
- FOUNDATION Fieldbus
- PROFIBUS PA.
Производители систем ЧПУ и промышленных роботов
Системы ЧПУ
Принцип работы ПИД-регулятора для начинающих
Как следует из названия, в этой статье мы дадим точное представление о структуре и работе ПИД-контроллера. Однако сначала, давайте познакомимся с ПИД-контроллерами.
ПИД-регуляторы находятся в широком диапазоне применений для управления промышленными процессами. Приблизительно 95% операций с замкнутым контуром в промышленной автоматизации используют ПИД-регуляторы. PID обозначает Пропорционально-интегральная-диференциальная составляющая. Эти три контроллера объединены таким образом, что он создает управляющий сигнал.
В качестве контроллера обратной связи он обеспечивает выход управления на желаемых уровнях. ПИД-регулирование осуществлялось с помощью аналоговых электронных компонентов, перед изобретением микропроцессоров. Но сегодня все ПИД-контроллеры обрабатываются микропроцессорами. ПрограммируемыеПрограммируемые логические контроллеры также имеют встроенные настройки ПИД-регулятора. Благодаря гибкости и надежности ПИД-регуляторов, они традиционно используются в системах управления технологическим процессом.
ПИД-регулирование осуществлялось с помощью аналоговых электронных компонентов, перед изобретением микропроцессоров. Но сегодня все ПИД-контроллеры обрабатываются микропроцессорами. ПрограммируемыеПрограммируемые логические контроллеры также имеют встроенные настройки ПИД-регулятора. Благодаря гибкости и надежности ПИД-регуляторов, они традиционно используются в системах управления технологическим процессом.
Работа ПИД-регулятора
При использовании недорогого простого контроллера возможны только два состояния управления, например, полностью ВКЛ или полностью ВЫКЛ. Он используется для настроек с ограничением контроля, в котором эти два состояния управления достаточно для целей управления. Однако характер этого контроля ограничивает его использование и, следовательно, заменяется ПИД-контроллерами.
ПИД-регулятор поддерживает выход таким образом, что между переменной процесса и заданной точкой / желаемым выходом с помощью операций замкнутого контура имеется нулевая ошибка. ПИД использует три основных поведения управления, которые объясняются ниже.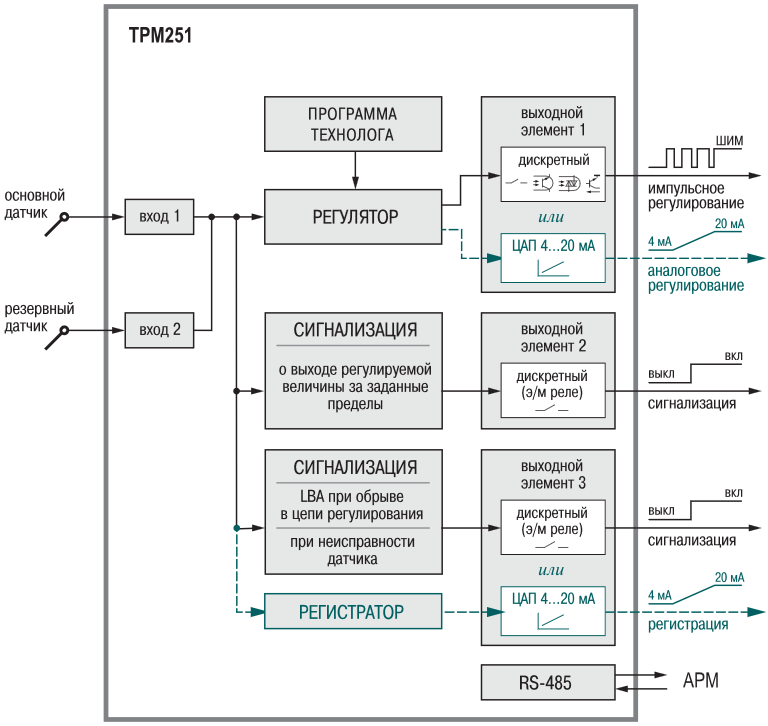
П-контроллер:
Пропорциональный или П-регулятор дает выход, который пропорционален текущей ошибке e (t). Он сравнивает желаемую или заданную точку с фактическим значением или значением процесса обратной связи. Полученная ошибка умножается на пропорциональную константу, чтобы получить выход. Если значение ошибки равно нулю, то выход этого контроллера равен нулю.
Этот контроллер требует смещения или ручной сброс при использовании отдельно. Это происходит потому, что он никогда не достигает состояния устойчивого состояния. Он обеспечивает стабильную работу, но всегда поддерживает постоянную ошибку. Скорость реакции возрастает при увеличении пропорциональной константы Kр.
И-контроллер
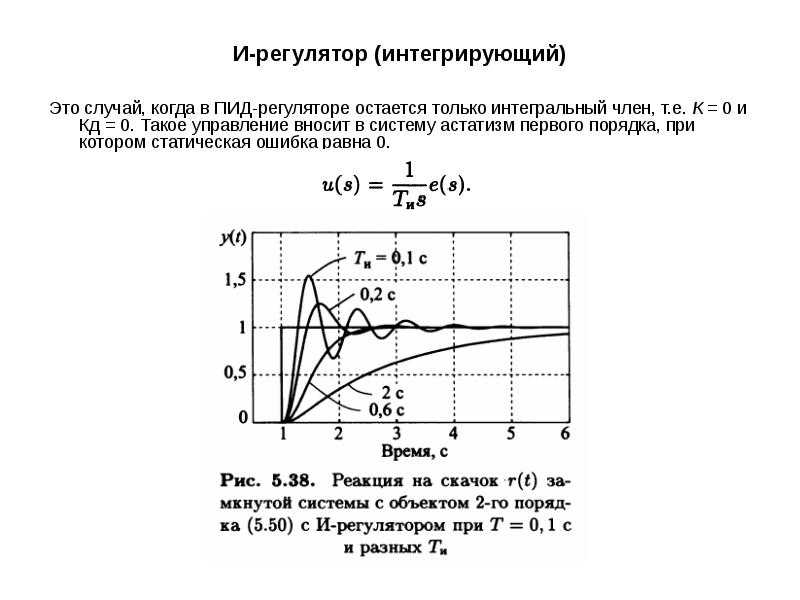
Из-за ограничения П-контроллера, где всегда существует смещение между переменной процесса и заданным значением, необходим И-контроллер, который обеспечивает необходимые действия для устранения ошибки установившегося состояния.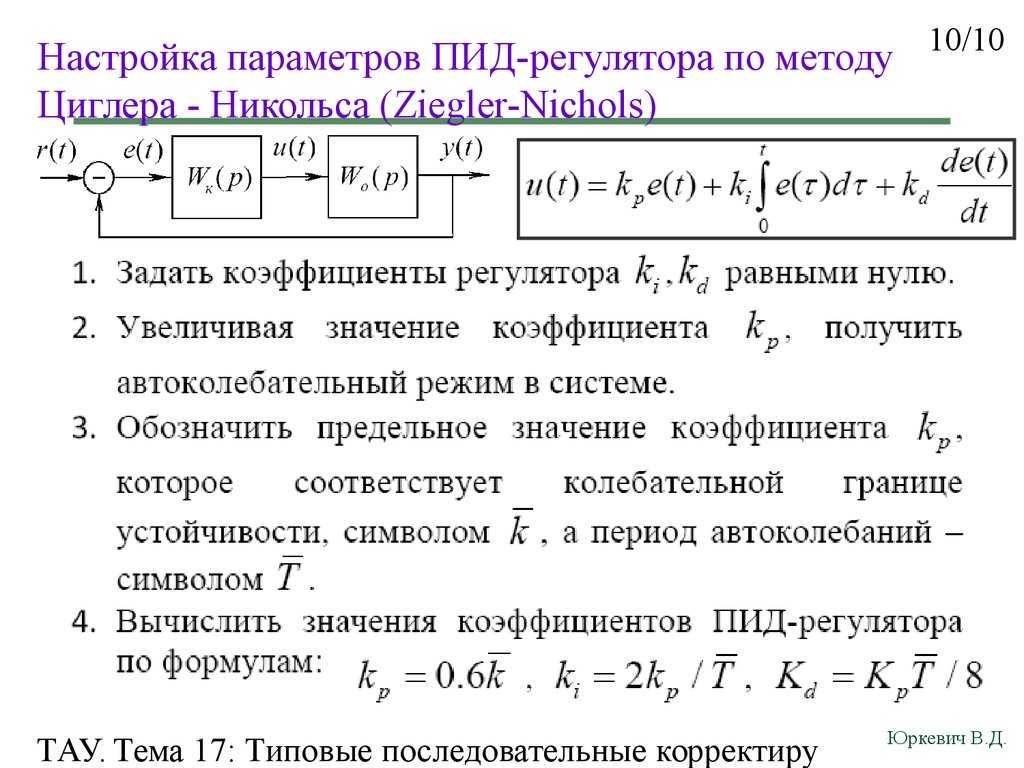 Он интегрирует ошибку в течение периода времени, пока значение ошибки не достигнет нуля. Он содержит значение для конечного устройства управления, при котором ошибка становится равной нулю.
Он интегрирует ошибку в течение периода времени, пока значение ошибки не достигнет нуля. Он содержит значение для конечного устройства управления, при котором ошибка становится равной нулю.
Интегральное управление уменьшает его выход, когда происходит отрицательная ошибка. Он ограничивает скорость реакции и влияет на стабильность системы. Скорость реакции увеличивается за счет уменьшения интегрального усиления Ki.
На приведенном выше рисунке, когда коэффициент усиления И-контроллера уменьшается, ошибка установившегося режима также продолжает уменьшаться. В большинстве случаев контроллер ПИ используется, в частности, когда требуется высокая скорость ответа.
При использовании ПИ-регулятора выход И-контроллера ограничен некоторым диапазоном для преодоления интегральных условий, когда интегральный выход растет даже при нулевом состоянии ошибки из-за нелинейности на установке.
Д-контроллер
И-контроллер не может предсказать будущее поведение ошибки. Поэтому он реагирует нормально после изменения заданного значения. Д-контроллер преодолевает эту проблему, ожидая будущего поведения ошибки. Его выход зависит от скорости изменения погрешности за время, умноженное на постоянную производной. Это дает начало запуска для выхода, тем самым увеличивая системный отклик.
Поэтому он реагирует нормально после изменения заданного значения. Д-контроллер преодолевает эту проблему, ожидая будущего поведения ошибки. Его выход зависит от скорости изменения погрешности за время, умноженное на постоянную производной. Это дает начало запуска для выхода, тем самым увеличивая системный отклик.
На приведенном выше рисунке ответ контроллера Д больше, по сравнению с контроллером ПИ, а также время установления выходного сигнала уменьшается. Это улучшает стабильность системы за счет компенсации фазового запаздывания, вызванного И-контроллером. Увеличение производного усиления увеличивает скорость реакции..
Итак, наконец, мы заметили, что, объединив эти три контроллера, мы получим желаемый ответ для системы. Различные производители разрабатывают различные алгоритмы ПИД.
Методы настройки ПИД-регулятора
Перед началом работы ПИД-регулятора он должен быть настроен на динамику контролируемого процесса. Дизайнеры дают значения по умолчанию для параметров П, И, Д, и эти значения не могут дать желаемую производительность, а иногда приводят к нестабильности и медленным характеристикам управления. Разработаны различные методы настройки для настройки ПИД-регуляторов и требуют от оператора большого внимания для выбора наилучших значений пропорциональных, интегральных и диференциальных коэффициентов. Некоторые из них приведены ниже.
Разработаны различные методы настройки для настройки ПИД-регуляторов и требуют от оператора большого внимания для выбора наилучших значений пропорциональных, интегральных и диференциальных коэффициентов. Некоторые из них приведены ниже.
Метод проб и ошибок: это простой способ настройки ПИД-регулятора. Пока система или контроллер работают, мы можем настроить контроллер. В этом методе сначала нужно установить значения Ki и Kd в нуль и увеличить пропорциональный коэффициент (Kp), пока система не достигнет колебательного поведения. Как только он осциллирует, отрегулируйте Ki (интегральный термин), чтобы колебания остановились и, наконец, отрегулировали Д, чтобы получить быстрый отклик.
Технологическая кривая технологического процесса: это метод настройки с открытым циклом. Он производит ответ, когда к системе применяется шаг ввода. Первоначально мы должны вручную вводить некоторые данные управления в систему и записывать кривую ответа.
После этого нам нужно рассчитать наклон, неподвижное время, время нарастания кривой и, наконец, подставить эти значения в уравнениях П, И и Д, чтобы получить значения коэффициента усиления ПИД.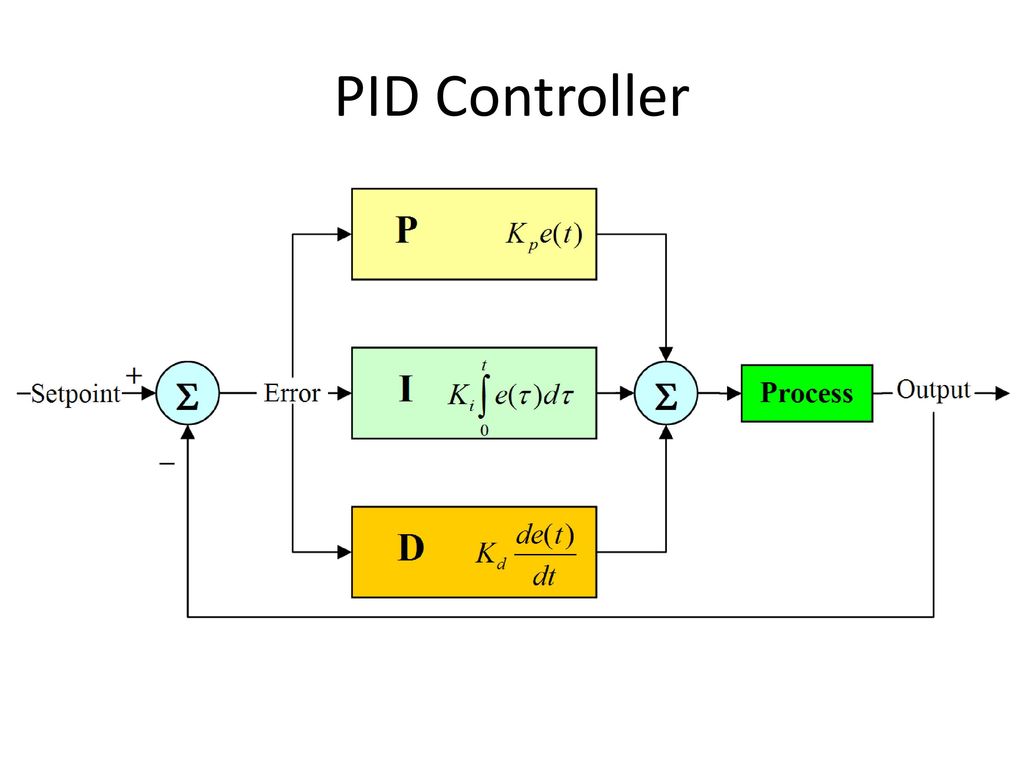
Метод Zeigler-Nichols: Zeigler-Nichols предложил методы замкнутого контура для настройки ПИД-регулятора. Это метод непрерывного циклирования и метод демпфирования колебаний. Процедуры для обоих методов одинаковы, но поведение колебаний различно. При этом сначала нужно установить постоянную p-контроллера, Kp на определенное значение, а значения Ki и Kd равны нулю. Пропорциональный коэффициент усиления увеличивается до тех пор, пока система не будет колебаться с постоянной амплитудой.
Усиление, при котором система производит постоянные колебания, называется конечным усилением (Ku), а период колебаний называется предельным периодом (Pc). Как только это достигнуто, мы можем ввести значения P, I и D в ПИД-контроллере по таблице Zeigler-Nichols, зависит от контроллера, используемого как P, PI или PID, как показано ниже.
Структура ПИД-регулятора
ПИД-регулятор состоит из трех членов, а именно пропорционального, интегрального и диференциального.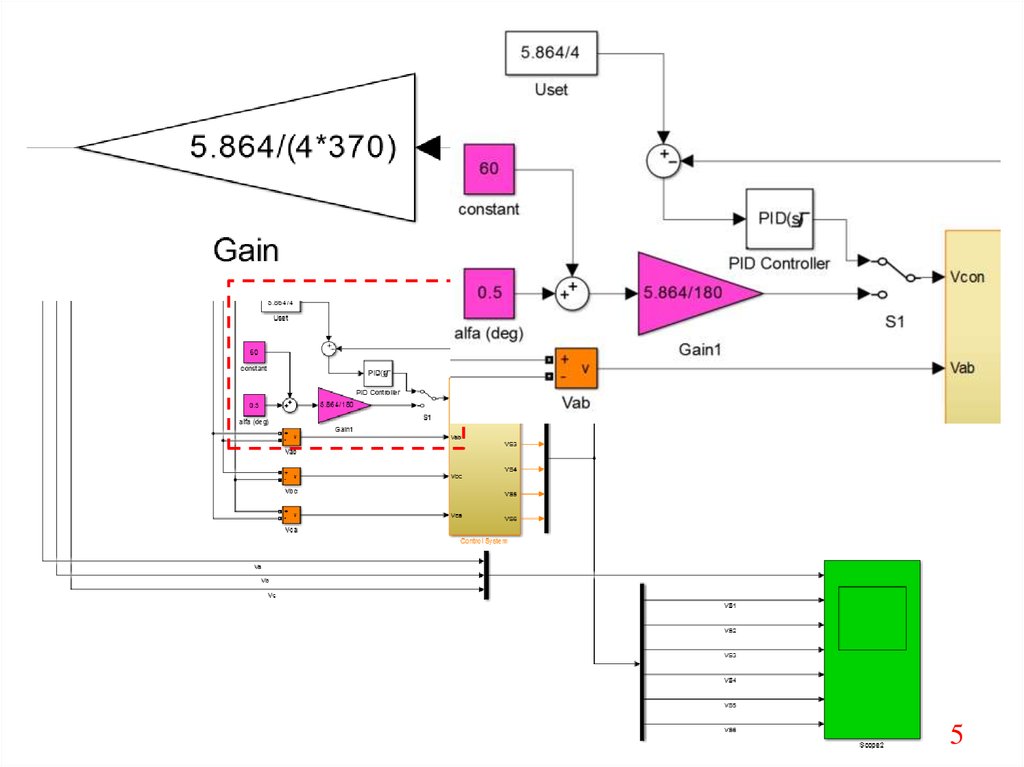 Объединенная работа этих трех контроллеров дает стратегию управления процессом контроля. ПИД-регулятор управляет переменными процесса, такими как давление, скорость, температура, расход и т. д. В некоторых приложениях используются ПИД-регуляторы в каскадных схемах, где для достижения контроля используются два или более ПИД.
Объединенная работа этих трех контроллеров дает стратегию управления процессом контроля. ПИД-регулятор управляет переменными процесса, такими как давление, скорость, температура, расход и т. д. В некоторых приложениях используются ПИД-регуляторы в каскадных схемах, где для достижения контроля используются два или более ПИД.
На приведенном выше рисунке показана структура ПИД-регулятора. Он состоит из блока PID, который дает свой вывод для обработки блока. Процесс / установка состоит из конечных устройств управления, таких как исполнительные механизмы, регулирующие клапаны и другие управляющие устройства для управления различными процессами промышленности / установки.
Сигнал обратной связи от технологической установки сравнивается с уставкой или сигналом u (t), и соответствующий сигнал ошибки e (t) подается на алгоритм ПИД-регулирования. Согласно пропорциональным, интегральным и диференциальным расчетам в алгоритме, контроллер производит комбинированный ответ или управляемый выход, который применяется к устройствам управления установкой.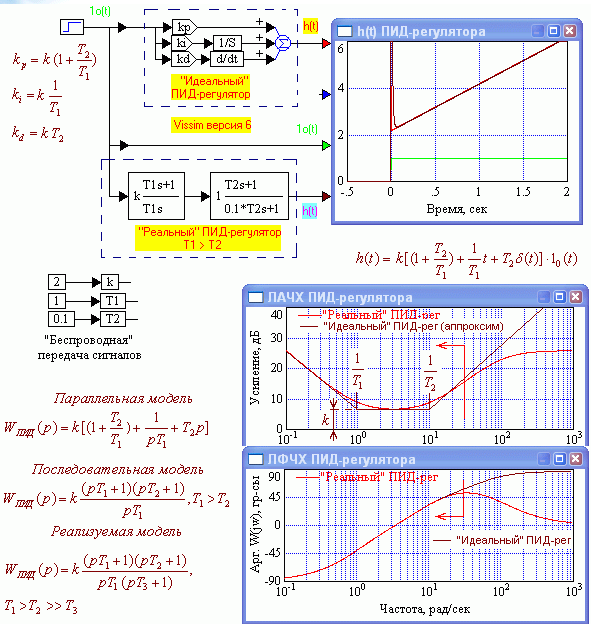
Все управляющие приложения не нуждаются во всех трех элементах управления. Комбинации, такие как элементы управления PI и PD, очень часто используются в практических приложениях.
Работа и его применение – StudiousGuy
PID, этот термин означает пропорциональную интегральную производную. ПИД-регулятор обычно использует устройство управления с обратной связью с обратной связью, которое помогает контролировать и регулировать различные параметры процесса, включая давление, температуру, скорость, расход и т. д. ПИД-регулятор используется на заводах и в промышленности в относительно больших масштабах. контролировать различные виды деятельности. Первый ПИД-регулятор был изобретен американским изобретателем и предпринимателем Элмером Амброузом Сперри-старшим в 1911. Автоматические ПИД-регуляторы были представлены для промышленного и коммерческого использования в середине 1950-х годов.
Указатель статей (щелкните, чтобы перейти)
Структура и блок-схема ПИД-регулятора
Структура ПИД-регулятора обычно включает три элемента управления, а именно пропорциональное, интегральное и производное управление.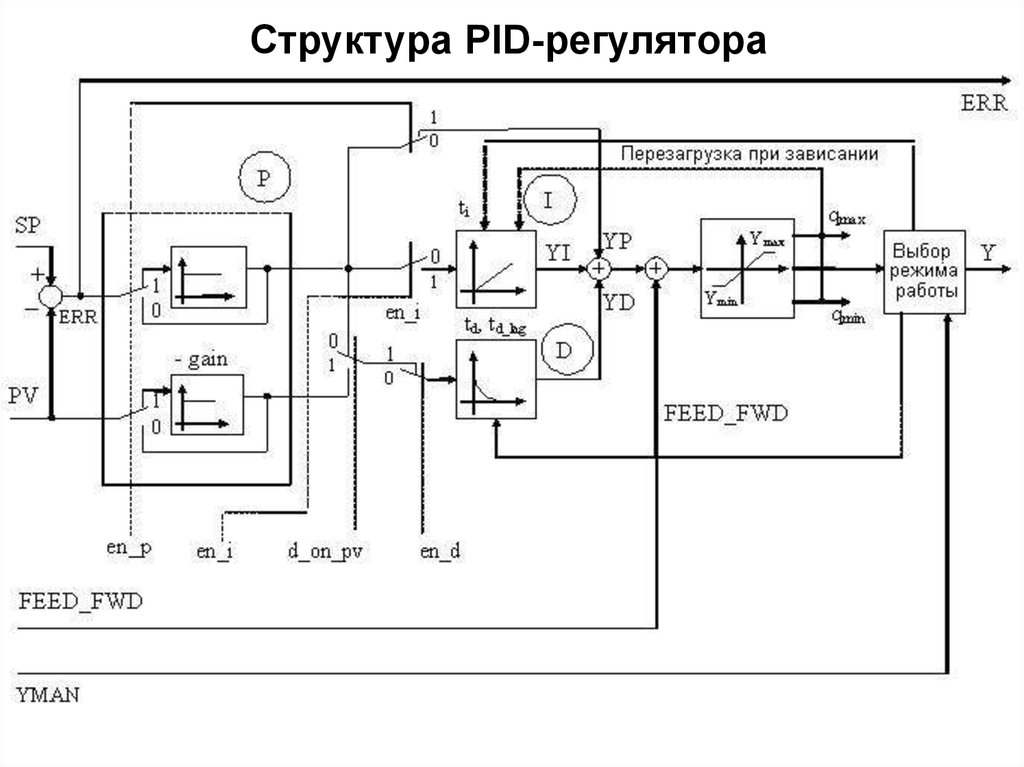 Эти три контроллера ПИД-регулятора используются для создания комбинированного выходного сигнала, который используется для формирования стратегии управления, которая дополнительно управляет работой устройства и манипулирует физическими параметрами, такими как температура, давление и т. д. Блок ПИД-регулятора передает вывод в блок процесса. Блок процесса или установки содержит основные устройства управления, такие как исполнительные механизмы, регулирующие клапаны и т. д. Блок обратной связи принимает текущий входной сигнал и сравнивает его с эталонным сигналом или заданным значением для получения сигнала ошибки. Затем этот сигнал ошибки подается на алгоритм PID. Комбинированный ответ или управляемый сигнал затем подается на устройства управления, установленные на установке. ПИД-регулятор не обязательно состоит из обеих трех переменных управления. Комбинация ПИ- и ПД-регуляторов довольно часто используется для управления различными процессами в промышленности или на предприятии.
Эти три контроллера ПИД-регулятора используются для создания комбинированного выходного сигнала, который используется для формирования стратегии управления, которая дополнительно управляет работой устройства и манипулирует физическими параметрами, такими как температура, давление и т. д. Блок ПИД-регулятора передает вывод в блок процесса. Блок процесса или установки содержит основные устройства управления, такие как исполнительные механизмы, регулирующие клапаны и т. д. Блок обратной связи принимает текущий входной сигнал и сравнивает его с эталонным сигналом или заданным значением для получения сигнала ошибки. Затем этот сигнал ошибки подается на алгоритм PID. Комбинированный ответ или управляемый сигнал затем подается на устройства управления, установленные на установке. ПИД-регулятор не обязательно состоит из обеих трех переменных управления. Комбинация ПИ- и ПД-регуляторов довольно часто используется для управления различными процессами в промышленности или на предприятии.
Работа ПИД-регулятора
ПИД-регулятор обычно работает по принципу регулировки или настройки пропорциональных, интегральных или производных составляющих.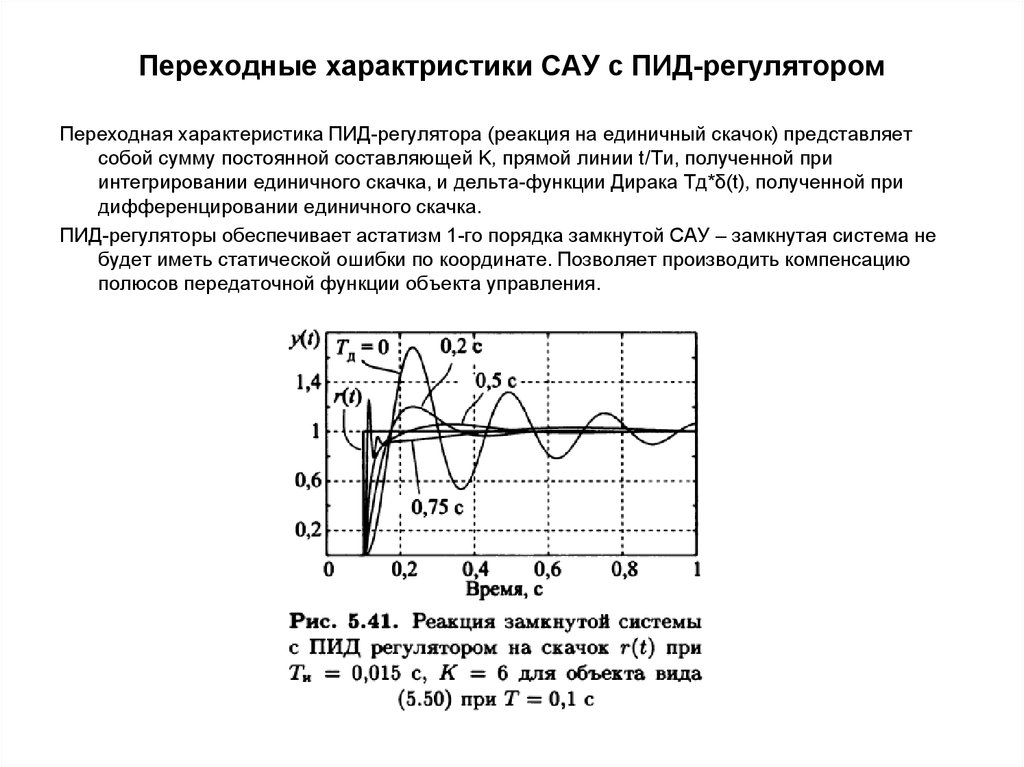 Разница между этими переменными оценивается, и часть входного сигнала возвращается на устройство в качестве управляющего сигнала обратной связи. Это значение обычно называют поправочным коэффициентом. Например, если кондиционер не вырабатывает достаточно холодного воздуха, то контроллер оценивает поправочный коэффициент, т. е. разницу между температурой в помещении и желаемой температурой, и возвращает ее на устройство. Затем внутренний механизм устройства снижает температуру до тех пор, пока не будет достигнута минимальная разница между желаемым и результирующим значением. Точно так же в случае с духовкой, если не вырабатывается достаточное количество тепла, температура регулируется, а тепло увеличивается. Обычно существует три шага для настройки физических параметров, таких как температура, расход и давление, в соответствии с требованиями. К ним относятся пропорциональная настройка, интегральная настройка и настройка по производной.
Разница между этими переменными оценивается, и часть входного сигнала возвращается на устройство в качестве управляющего сигнала обратной связи. Это значение обычно называют поправочным коэффициентом. Например, если кондиционер не вырабатывает достаточно холодного воздуха, то контроллер оценивает поправочный коэффициент, т. е. разницу между температурой в помещении и желаемой температурой, и возвращает ее на устройство. Затем внутренний механизм устройства снижает температуру до тех пор, пока не будет достигнута минимальная разница между желаемым и результирующим значением. Точно так же в случае с духовкой, если не вырабатывается достаточное количество тепла, температура регулируется, а тепло увеличивается. Обычно существует три шага для настройки физических параметров, таких как температура, расход и давление, в соответствии с требованиями. К ним относятся пропорциональная настройка, интегральная настройка и настройка по производной.
Пропорциональная настройка
Этот тип настройки включает настройку или коррекцию полезного сигнала пропорционально текущему сигналу ошибки e(t). Сигнал ошибки представляет собой разницу между заданным или заданным значением и фактическим значением. Текущий сигнал ошибки дополнительно умножается на предварительно вычисленную пропорциональную константу для получения выходного сигнала. Если значение ошибки равно нулю, выходное значение контроллера также равно нулю. Здесь желаемое значение редко достигается, поскольку оно никогда не достигает стационарного состояния. Устройства управления, которые используют пропорциональную настройку или p-регуляторы, обеспечивают стабильную работу, но имеют тенденцию поддерживать установившуюся ошибку. Константа пропорциональности напрямую сравнима со скоростью отклика устройства. Это означает, что при увеличении пропорциональной константы Kc соответственно увеличивается скорость отклика. Если этот тип контроллера не используется в сочетании с другим типом контроллера, требуется ручной сброс и правильное смещение.
Сигнал ошибки представляет собой разницу между заданным или заданным значением и фактическим значением. Текущий сигнал ошибки дополнительно умножается на предварительно вычисленную пропорциональную константу для получения выходного сигнала. Если значение ошибки равно нулю, выходное значение контроллера также равно нулю. Здесь желаемое значение редко достигается, поскольку оно никогда не достигает стационарного состояния. Устройства управления, которые используют пропорциональную настройку или p-регуляторы, обеспечивают стабильную работу, но имеют тенденцию поддерживать установившуюся ошибку. Константа пропорциональности напрямую сравнима со скоростью отклика устройства. Это означает, что при увеличении пропорциональной константы Kc соответственно увеличивается скорость отклика. Если этот тип контроллера не используется в сочетании с другим типом контроллера, требуется ручной сброс и правильное смещение.
Интегральная настройка
Контроллеры «P» или контроллеры, использующие пропорциональную настройку, подвержены ограничению, заключающемуся в том, что всегда существует установившаяся ошибка, которая представляет собой смещение между уставкой и переменной процесса обратной связи.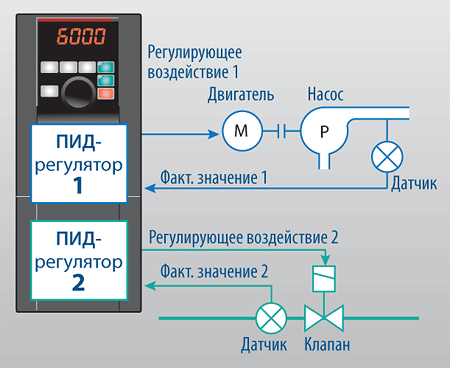 . Этот тип ограничения может быть устранен путем использования I-контроллеров. I-контроллеры используют интегральную настройку для генерации выходного сигнала для управления различными физическими параметрами. Этот тип настройки имеет тенденцию интегрировать сигнал ошибки по времени до тех пор, пока не будет достигнуто минимальное или нулевое значение ошибки. В случае отрицательного значения ошибки интегральное управление стремится уменьшить выход. Скорость отклика и стабильность системы; тем не менее, получить воздействие во время процесса. ПИ-регулятор восприимчив к интегральным условиям насыщения из-за нелинейностей, присутствующих в объекте. При этом условии интегральный выход продолжает увеличиваться даже при нулевом состоянии ошибки. Чтобы преодолеть этот недостаток, выход I-регулятора ограничен определенным диапазоном. Интегральное усиление регуляторов «I», обычно обозначаемое Ki, косвенно пропорционально скорости отклика системы. Это означает, что при увеличении интегрального усиления быстродействие системы уменьшается на сопоставимую величину.
. Этот тип ограничения может быть устранен путем использования I-контроллеров. I-контроллеры используют интегральную настройку для генерации выходного сигнала для управления различными физическими параметрами. Этот тип настройки имеет тенденцию интегрировать сигнал ошибки по времени до тех пор, пока не будет достигнуто минимальное или нулевое значение ошибки. В случае отрицательного значения ошибки интегральное управление стремится уменьшить выход. Скорость отклика и стабильность системы; тем не менее, получить воздействие во время процесса. ПИ-регулятор восприимчив к интегральным условиям насыщения из-за нелинейностей, присутствующих в объекте. При этом условии интегральный выход продолжает увеличиваться даже при нулевом состоянии ошибки. Чтобы преодолеть этот недостаток, выход I-регулятора ограничен определенным диапазоном. Интегральное усиление регуляторов «I», обычно обозначаемое Ki, косвенно пропорционально скорости отклика системы. Это означает, что при увеличении интегрального усиления быстродействие системы уменьшается на сопоставимую величину.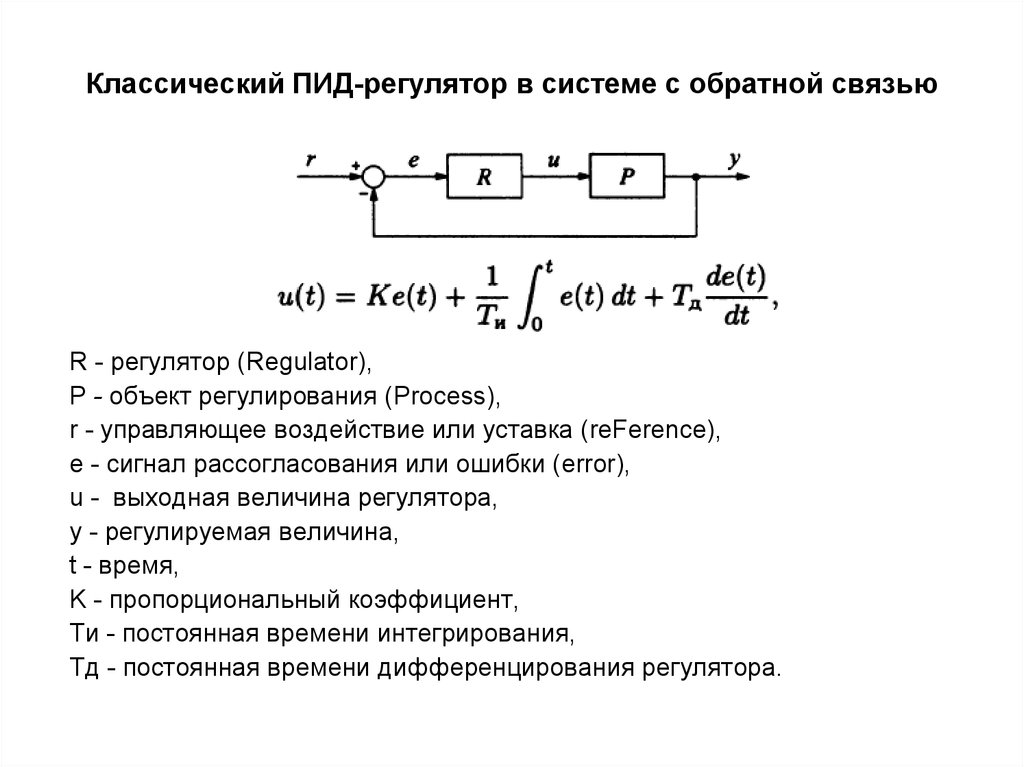 Точно так же интегральное усиление прямо пропорционально установившейся ошибке. Это означает, что установившаяся ошибка уменьшается за счет уменьшения интегрального коэффициента усиления контроллера и наоборот. ПИ-контроллеры обычно используются в приложениях, где большое время отклика системы не имеет первостепенного значения.
Точно так же интегральное усиление прямо пропорционально установившейся ошибке. Это означает, что установившаяся ошибка уменьшается за счет уменьшения интегрального коэффициента усиления контроллера и наоборот. ПИ-контроллеры обычно используются в приложениях, где большое время отклика системы не имеет первостепенного значения.
Производная настройка
Регуляторы «D» или производная настройка обычно используются для преодоления определенных ограничений настройки «I». Например, «I»-контроллер не может предсказать будущее поведение значения ошибки. Такие устройства, как правило, работают нормально даже при изменении заданной фиксированной точки или требуемого значения. Выходной сигнал регуляторов производной равен скорости изменения сигнала ошибки по времени, умноженной на постоянную производной. Настройка производной помогает улучшить отклик системы и уменьшить время установления выходного сигнала. Коэффициент усиления производной Kd прямо пропорционален скорости отклика системы. Это означает, что увеличение коэффициента усиления по производной регулятора приводит к увеличению времени отклика системы.
Это означает, что увеличение коэффициента усиления по производной регулятора приводит к увеличению времени отклика системы.
Типы ПИД-регуляторов
В зависимости от типа используемой системы управления ПИД-регуляторы можно разделить на три категории: двухпозиционные, пропорциональные и стандартные.
Управление ВКЛ/ВЫКЛ
Управление включением/выключением является одним из самых простых типов устройств, используемых для регулировки или настройки температуры в определенной области. Здесь контроллер стремится переключить устройство в состояние ВКЛ, как только выходной сигнал пересекает конкретную желаемую фиксированную точку. Одним из наиболее часто используемых устройств включения/выключения является ограничитель. Контроллер ограничения использует для своей работы реле с фиксацией. Реле должно управляться вручную. Температура или другой переменный параметр устанавливается на определенное значение. Устройство имеет тенденцию сохранять выключенное состояние, если выходной сигнал или результирующий сигнал отстает от целевого значения. Как только порог или заданное значение достигнуто, устройство включается.
ON OFF Характеристики управления
Пропорциональное управление
Пропорциональное управление в основном предназначено для преодоления и устранения циклического ограничения управления включением/выключением. Этот тип контроля запрещает контроллеру превышать конкретное предварительно определенное пороговое значение. Устройство стремится достичь желаемой точки, чтобы поддерживать значение физического параметра на постоянном уровне; однако он не превышает фиксированную пороговую точку. Например, нагреватель с пропорциональным регулированием поддерживает температуру на постоянном уровне и предотвращает перегрев. Когда температура нагревателя пытается превысить пороговое значение, срабатывает контроллер. Подача отключается, и температура устройства снижается.
Характеристики пропорционального регулирования
ПИД-регулятор стандартного типа
ПИД-регуляторы стандартного типа используют комбинацию пропорционального управления с интегральным и дифференциальным управлением. Объединенный элемент управления помогает блоку обработки данных и помогает устройству автоматически производить манипуляции в системе и изменять переменные. Интегральные и производные модификации в этом случае выражаются в единицах времени. Эти контроллеры также упоминаются через их обратные значения, RATE и RESET, соответственно. Эти типы контроллеров обеспечивают более точное и стабильное управление по сравнению с другими контроллерами.
Объединенный элемент управления помогает блоку обработки данных и помогает устройству автоматически производить манипуляции в системе и изменять переменные. Интегральные и производные модификации в этом случае выражаются в единицах времени. Эти контроллеры также упоминаются через их обратные значения, RATE и RESET, соответственно. Эти типы контроллеров обеспечивают более точное и стабильное управление по сравнению с другими контроллерами.
ПИД-регуляторы реального времени
ПИД-регуляторы реального времени чаще всего используются в коммерческих и практических целях. Устройства управления, которые используют ПИД-регуляторы в реальном времени, предоставляют различные варианты управления SOLO и двухконтурным управлением. Автономный тип ПИД-регуляторов имеет тенденцию обеспечивать различные конфигурации фиксированной точки для создания ряда автономных аварийных сигналов. Эти типы автономных контроллеров в основном включают ПИД-регуляторы, поставляемые Honeywell, контроллеры с автонастройкой от OMEGA, Siemens и ABB, контроллеры температуры от Yokogawa и различные другие. Расположение блоков PID обычно выполняется с помощью PLC или PAC. Здесь каждый PAC или PLC включает в себя блок PID в рамках алгоритма или программного обеспечения. Во многих промышленных приложениях ПЛК используются в качестве ПИД-регуляторов.
Расположение блоков PID обычно выполняется с помощью PLC или PAC. Здесь каждый PAC или PLC включает в себя блок PID в рамках алгоритма или программного обеспечения. Во многих промышленных приложениях ПЛК используются в качестве ПИД-регуляторов.
Применение ПИД-регулятора
Устройство ПИД-регулятора обычно используется в промышленности для управления или регулировки сложных физических параметров окружающей среды, таких как температура и давление. Его также можно использовать для поддержания этих параметров на постоянном уровне. Ниже перечислены некоторые из наиболее распространенных применений ПИД-регулятора:
1. ПИД-регулятор является неотъемлемой частью промышленной системы контроля температуры. Обычно используется для контроля температуры в помещении. Здесь вход ПИД-регулятора поступает от датчика температуры, а выход подается на вентилятор или нагреватель. вентилятор или обогреватель; следовательно, действует как элемент управления. Скорость вентилятора или температура нагревателя регулируются в соответствии с сигналом обратной связи.
2. В большинстве производственных отраслей используются огромные печи для плавления и нагревания различных элементов. Температуру таких печей требуется периодически контролировать. Кроме того, необходимо иметь возможность контролировать и изменять температуру, чтобы поддерживать температуру печи на желаемом постоянном уровне. Обычно для этой цели используется ПИД-регулятор.
3. ПИД-регулятор в основном используется в качестве контроллера заряда с отслеживанием точки максимальной мощности или контроллера заряда MPPT. ВАХ фотогальванического элемента обычно зависят от двух параметров, а именно освещенности и диапазона температур. По этой причине часто требуется изменять значения тока и рабочего напряжения в зависимости от погодных условий. Отслеживание точки наибольшей мощности фотогальванического элемента является сложной задачей. ПИД-регулятор обычно используется для выполнения задачи поддержания стабильного значения тока и напряжения путем оценки MPPT и обеспечения постоянного значения тока и напряжения при каждом изменении погоды.
4. ПИД-регулятор чаще всего используется в силовых преобразователях.
5. Различные исследовательские, опытно-конструкторские и испытательные организации, такие как химическая, фармацевтическая и обрабатывающая промышленность, используют ПИД-регуляторы для поддержания влажности и температуры в определенной области на постоянном уровне.
6. ПИД-регуляторы также используются в устройствах регулирования pH, расхода и скорости.
Применение ПИД-регулятора
Преимущества ПИД-регулятора
ПИД-регулятор имеет множество преимуществ, например:
1. Большинство современных устройств, оснащенных ПИД-регулятором, недороги.
2. Настройка и эксплуатация ПИД-регуляторов не требуют большого опыта. Следовательно, с такими устройствами может работать и неквалифицированный человек.
3. ПИД-регуляторы не зависят от процесса.
4. Они обеспечивают точный контроль заданного значения, что позволяет пользователю зафиксировать значение температуры или давления на определенном постоянном значении.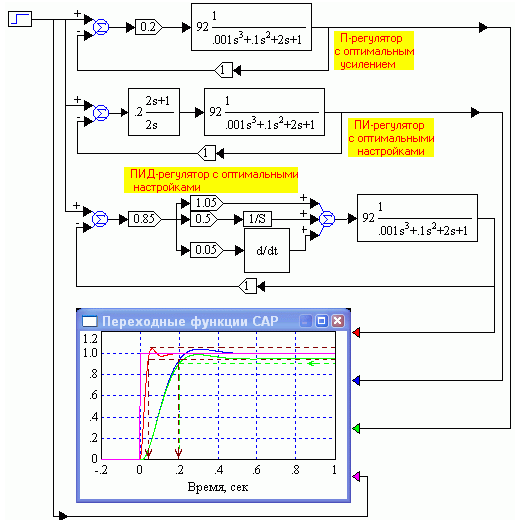
5. ПИД-регуляторы не требуют частого обслуживания.
6. Устройства и системы, оснащенные ПИД-регуляторами, имеют значительно улучшенное быстродействие.
Недостатки ПИД-регулятора
Некоторые ограничения или недостатки ПИД-регулятора включают:
1. ПИД-регуляторы могут работать нестабильно, если они неправильно настроены.
2. Эти типы контроллеров чувствительны к дифференциальному усилению шума.
3. Контроллер может поддерживать колебания вокруг рабочей точки и вызывать проблемы.
4. Постоянное изменение нагрузки влияет на динамические характеристики системы.
5. Повторная настройка контроллера может сократить срок службы и привести к износу.
Что такое ПИД-регулятор? Изучите работу ПИД-регулятора, структуру и методы настройки. Есть два типа систем; система открытого цикла и система замкнутого цикла.
Разомкнутая система также известна как неуправляемая система и замкнутая система известна как управляемая система . В системе с разомкнутым контуром выход не контролируется, потому что эта система не имеет обратной связи, а в системе с замкнутым контуром выход управляется с помощью контроллера, и для этой системы требуется один или несколько путей обратной связи. Система с разомкнутым контуром очень проста, но бесполезна в приложениях промышленного управления, поскольку эта система неуправляема. Система с замкнутым контуром сложна, но наиболее удобна для промышленного применения, поскольку в этой системе выход может быть стабильным при желаемом значении, PID является примером замкнутой системы . Блок-схема этой системы показана на рисунке ниже.
В системе с разомкнутым контуром выход не контролируется, потому что эта система не имеет обратной связи, а в системе с замкнутым контуром выход управляется с помощью контроллера, и для этой системы требуется один или несколько путей обратной связи. Система с разомкнутым контуром очень проста, но бесполезна в приложениях промышленного управления, поскольку эта система неуправляема. Система с замкнутым контуром сложна, но наиболее удобна для промышленного применения, поскольку в этой системе выход может быть стабильным при желаемом значении, PID является примером замкнутой системы . Блок-схема этой системы показана на рисунке ниже. Система с замкнутым контуром также известна как система управления с обратной связью , и этот тип системы используется для проектирования автоматически стабильной системы с желаемым выходом или заданием. По этой причине он генерирует сигнал ошибки. Сигнал ошибки e(t) представляет собой разницу между выходным сигналом y(t) и эталонным сигналом u(t) .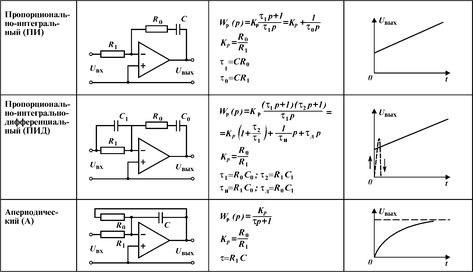 Когда эта ошибка равна нулю, это означает, что желаемый выходной сигнал достигнут, и в этом состоянии выходной сигнал такой же, как опорный сигнал.
Когда эта ошибка равна нулю, это означает, что желаемый выходной сигнал достигнут, и в этом состоянии выходной сигнал такой же, как опорный сигнал.
Например, , сушилка работает несколько раз, что является предварительно установленным значением. Когда сушилка включена, запускается таймер, и он будет работать до тех пор, пока таймер не истечет и не выдаст результат (сухая ткань). Это простая система с разомкнутым контуром, в которой выход не требует управления и не требует обратной связи. Если в этой системе мы использовали датчик влажности, который обеспечивает обратную связь и сравнивает это с заданным значением, выдает ошибку. Осушитель работает до тех пор, пока эта ошибка не станет равной нулю. Это означает, что когда влажность ткани будет такой же, как уставка, сушилка перестанет работать. В система с открытым контуром , сушилка будет работать в течение фиксированного времени независимо от того, сухая или мокрая одежда. Но в системе замкнутого цикла сушилка не будет работать в течение фиксированного времени, она будет работать до тех пор, пока одежда не высохнет.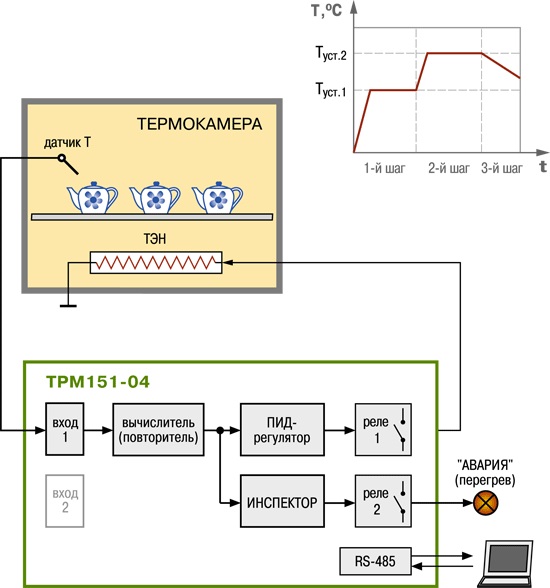 Это преимущество замкнутой системы и использования контроллера.
Это преимущество замкнутой системы и использования контроллера.
ПИД-регулятор и его работа:
Так что же такое ПИД-регулятор? ПИД-регулятор является общепризнанным и наиболее часто используемым контроллером в промышленности, поскольку ПИД-регулятор прост, обеспечивает хорошую стабильность и быстрый отклик. PID означает пропорциональный, интегральный, производный . В каждом приложении коэффициенты этих трех действий варьируются для получения оптимального отклика и контроля. Вход контроллера является сигналом ошибки, а выход передается установке/процессу. Выходной сигнал контроллера формируется таким образом, что выход объекта пытается достичь желаемого значения.
ПИД-регулятор — это система с замкнутым контуром , которая имеет систему управления с обратной связью и сравнивает переменную процесса (переменную обратной связи) с заданным значением, генерирует сигнал ошибки и в соответствии с этим регулирует выход системы.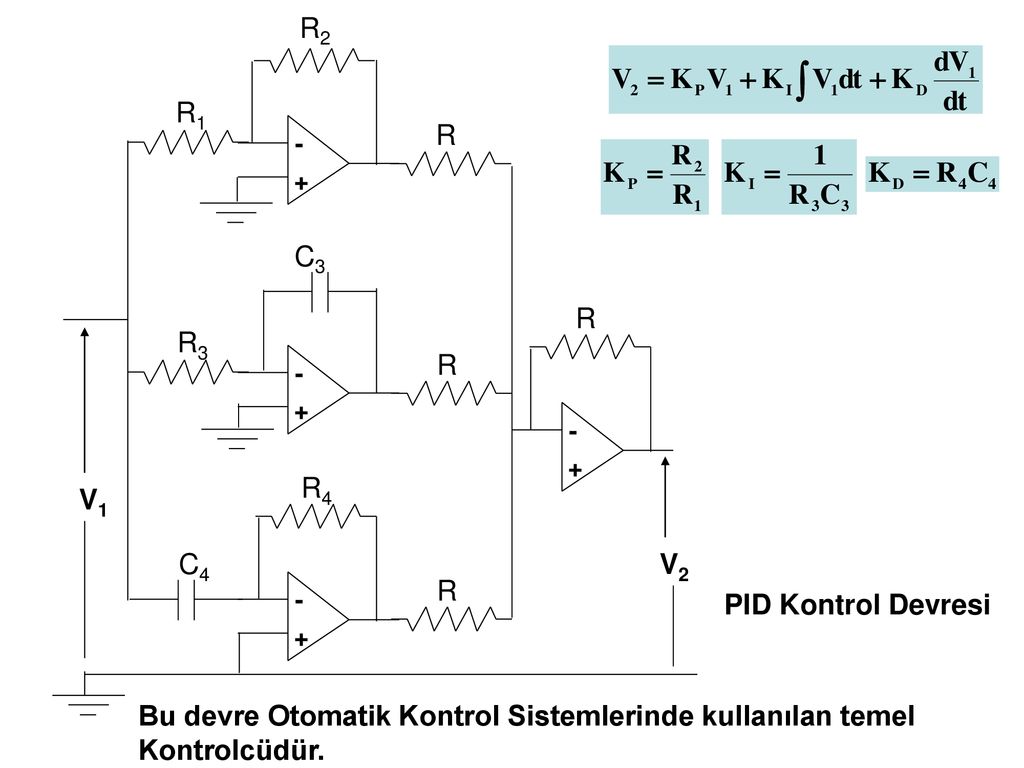 Этот процесс продолжается до тех пор, пока эта ошибка не станет равной нулю или значение переменной процесса не станет равным заданному значению.
Этот процесс продолжается до тех пор, пока эта ошибка не станет равной нулю или значение переменной процесса не станет равным заданному значению.
* Мы узнаем о пропорциональных, интегральных и производных действиях позже в этой статье.
ПИД-регулятор дает лучшие результаты, чем двухпозиционный регулятор . В контроллере ВКЛ/ВЫКЛ для управления системой доступны только два состояния. Он может быть включен или выключен. Он включается, когда значение процесса меньше заданного значения, и выключается, когда значение процесса превышает заданное значение. В этом контроллере выход никогда не будет стабильным, он всегда будет колебаться вокруг заданного значения. Но ПИД-регулятор более стабилен и точен по сравнению с регулятором ВКЛ/ВЫКЛ.
ПИД-регулятор представляет собой комбинацию трех терминов; Пропорциональный, интегральный и производный . Давайте разберемся в этих трех терминах по отдельности.
Режимы ПИД-регулирования:
Пропорциональный (P) отклик:
Член «P» пропорционален фактическому значению ошибки. Если ошибка велика, управляющий выход также велик, а если ошибка мала, управляющий выход также мал, но коэффициент усиления (K p ) равен 9.0003
Если ошибка велика, управляющий выход также велик, а если ошибка мала, управляющий выход также мал, но коэффициент усиления (K p ) равен 9.0003
Также с учетом. Скорость отклика также прямо пропорциональна пропорциональному коэффициенту усиления (K p ) . Таким образом, скорость отклика увеличивается за счет увеличения значения K p , но если K p увеличивается за пределы нормального диапазона, переменная процесса начинает колебаться с высокой скоростью и делает систему нестабильной.
у(т) ∝ е(т) y(t) = k i * e(t)
Где K p — пропорциональный коэффициент усиления.
Здесь результирующая ошибка умножается на коэффициент усиления пропорциональности (пропорциональную постоянную), как показано в уравнении выше. Если в это время используется только П-регулятор, он требует ручного сброса, так как он поддерживает стационарную ошибку (смещение).
Интегральный (I) ответ:
Интегральный регулятор обычно используется для уменьшения установившейся ошибки. Термин «I» интегрируется (по времени) с фактическим значением ошибки . Из-за интегрирования очень маленькое значение ошибки приводит к очень высокому интегральному отклику. Действие интегрального регулятора продолжает изменяться до тех пор, пока ошибка не станет равной нулю.
y(t) ∝ ∫ e(t) y(t) = k i ∫ e(t)
Где K i – пропорциональный коэффициент усиления.
Интегральное усиление обратно пропорционально скорости отклика, при увеличении k i скорость отклика уменьшается. Пропорциональные и интегральные регуляторы используются вместе (ПИ-регулятор) для обеспечения хорошей скорости отклика и отклика в установившемся режиме.
Производный (D) ответ:
Производный регулятор используется с комбинацией PD или PID. Он никогда не используется сам по себе, потому что, если ошибка постоянна (отлична от нуля), выход контроллера будет равен нулю. В этой ситуации контроллер ведет себя пожизненно с нулевой ошибкой, но на самом деле есть некоторая ошибка (постоянная). Выход контроллера производной прямо пропорционален скорости изменения ошибки во времени, как показано в уравнении. Сняв знак пропорциональности, получим производную коэффициента усиления (k д ). Как правило, производный контроллер используется, когда переменные процессора начинают колебаться или изменяются с очень высокой скоростью. D-контроллер также используется для прогнозирования будущего поведения ошибки по кривой ошибки. Математическое уравнение показано ниже;
Он никогда не используется сам по себе, потому что, если ошибка постоянна (отлична от нуля), выход контроллера будет равен нулю. В этой ситуации контроллер ведет себя пожизненно с нулевой ошибкой, но на самом деле есть некоторая ошибка (постоянная). Выход контроллера производной прямо пропорционален скорости изменения ошибки во времени, как показано в уравнении. Сняв знак пропорциональности, получим производную коэффициента усиления (k д ). Как правило, производный контроллер используется, когда переменные процессора начинают колебаться или изменяются с очень высокой скоростью. D-контроллер также используется для прогнозирования будущего поведения ошибки по кривой ошибки. Математическое уравнение показано ниже;
y(t) ∝ de(t)/dt y(t) = K d * de(t)/dt
Где K d — пропорциональный коэффициент усиления.
Пропорциональный и интегральный регулятор:
Это комбинация контроллера P и I.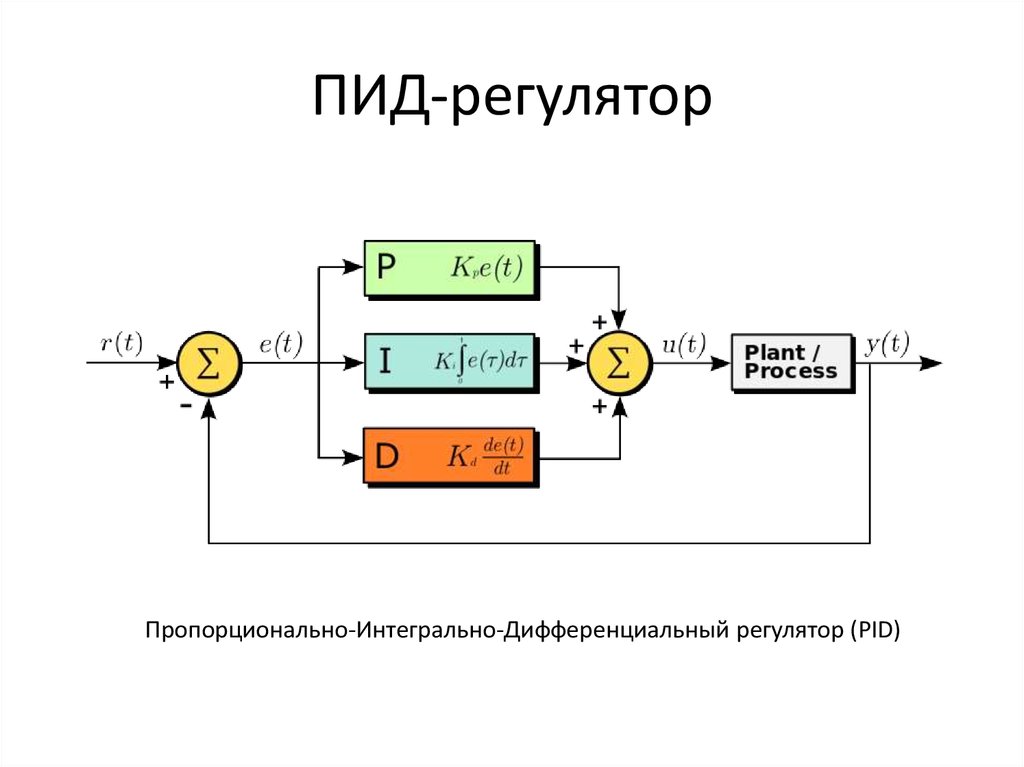 Выходом контроллера является суммирование обеих (пропорциональной и интегральной) характеристик. Математическое уравнение показано ниже;
Выходом контроллера является суммирование обеих (пропорциональной и интегральной) характеристик. Математическое уравнение показано ниже;
y(t) ∝ (e(t) + ∫ e(t) dt) y(t) = k p *e(t) + k i ∫ e(t) dt
Пропорционально-дифференциальный регулятор: Это комбинация P- и D-регулятора. Выход контроллера представляет собой суммирование пропорциональных и производных характеристик. Математическое уравнение PD-регулятора показано ниже;
y(t) ∝ (e(t) + de(t)/dt) y(t) = k p *e(t) + k d * de(t)/dt
Пропорциональный, интегральный и дифференциальный регулятор: Это комбинация P-, I- и D-регулятора. Выход контроллера представляет собой суммирование пропорциональных, интегральных и производных характеристик. Математическое уравнение PD-регулятора показано ниже;
y(t) ∝ (e(t) + ∫ e(t) dt + de(t)/dt) y(t) = k p *e(t) + k i ∫ e(t) dt + k d * de(t)/dt
Таким образом, путем объединения этой пропорциональной, интегральной и производной характеристик управления формируют ПИД-регулятор .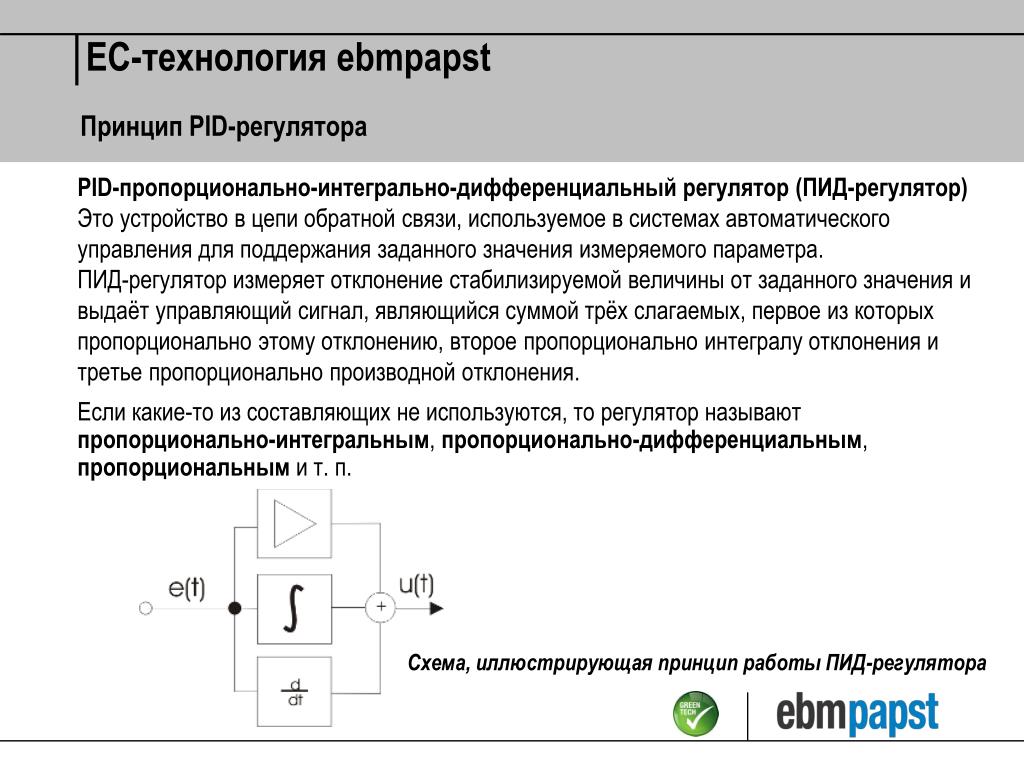
Методы настройки ПИД-регулятора:
Для достижения желаемого выхода этот контроллер должен быть правильно настроен. Процесс получения идеального отклика от ПИД-регулятора путем настройки ПИД-регулятора называется настройкой контроллера . Настройка ПИД означает установку оптимального значения усиления пропорционального (k p ), производного (k d ) и интегральный (k i ) отклик. ПИД-регулятор настроен на подавление возмущений. означает сохранение заданной уставки и отслеживание команд. Это означает, что если уставка изменяется, выходной сигнал контроллера будет соответствовать новой уставке. Если контроллер настроен правильно, выходной сигнал контроллера будет следовать переменной уставке с меньшими колебаниями и меньшим демпфированием.
Существует несколько способов настройки ПИД-регулятора и получения желаемой реакции. Ниже приведены методы настройки контроллера.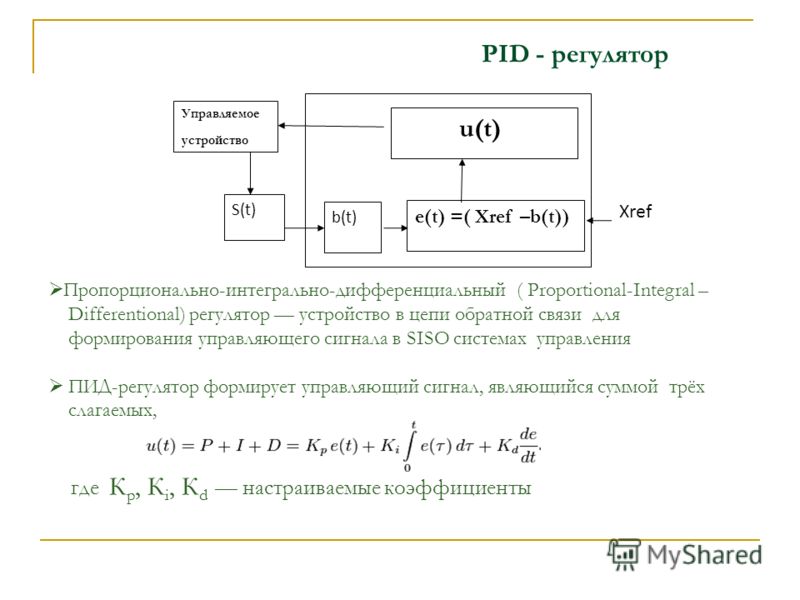
- Метод проб и ошибок
- Техника кривой реакции процесса
- Метод Циглера-Николса
- Метод реле
- Использование программного обеспечения
1. Метод проб и ошибок:
Метод проб и ошибок также известен как метод ручной настройки, и этот метод является самым простым. В этом методе сначала увеличивают значение kp до тех пор, пока система не достигнет колебательного отклика, но система не должна становиться нестабильной и сохранять значения kd и ki равными нулю. После этого установите значение ki таким образом, чтобы колебания системы прекратились. После этого установите значение kd для быстрого отклика.
2. Метод кривой реакции процесса:
Этот метод также известен как метод настройки Коэна-Куна. В этом методе сначала создается кривая реакции процесса в ответ на возмущение. По этой кривой мы можем рассчитать значение коэффициента усиления регулятора, время интегрирования и время производной.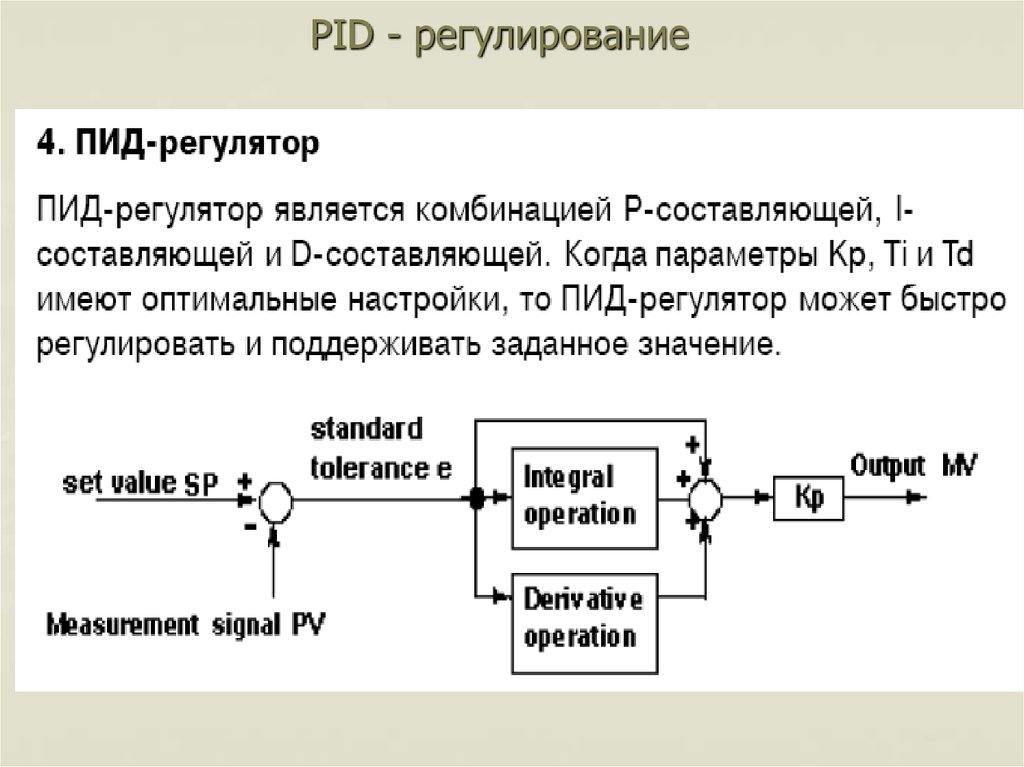 Эта кривая идентифицируется путем ручного ступенчатого тестирования процесса без обратной связи. Параметр модели можно найти по процентному возмущению начального шага. По этой кривой мы должны найти наклон, мертвое время и время нарастания кривой, которая представляет собой не что иное, как значение kp, ki и kd.
Эта кривая идентифицируется путем ручного ступенчатого тестирования процесса без обратной связи. Параметр модели можно найти по процентному возмущению начального шага. По этой кривой мы должны найти наклон, мертвое время и время нарастания кривой, которая представляет собой не что иное, как значение kp, ki и kd.
3. Метод Цейглера-Николса:
В этом методе также сначала устанавливаются значения ki и kd равными нулю. Пропорциональное усиление (kp) увеличивается до тех пор, пока не достигнет предельного усиления (ku). Окончательный коэффициент усиления есть не что иное, как коэффициент усиления, при котором выход контура начинает колебаться. Это ku и период колебаний Tu используются для получения коэффициента усиления ПИД-регулятора из таблицы ниже.
Тип контроллера | кп | к и | кд |
Р | 0,5 к и | ||
ИП | 0,45 к и | 0,54 к и /Т и | |
ПИД-код | 0,60 к и | 1,2 к и /T и | 3 к и Т и /40 |
4. Метод реле:
Метод реле:
Этот метод также известен как метод Астрома-Хагглунда. Здесь выход переключается между двумя значениями управляющей переменной, но эти значения выбираются таким образом, чтобы процесс пересекал заданное значение. Когда переменная процесса меньше уставки, управляющий выход устанавливается на более высокое значение. Когда значение процесса превышает заданное значение, управляющий выход устанавливается на более низкое значение, и формируется выходной сигнал. Период и амплитуда этого колебательного сигнала измеряются и используются для определения максимального усиления ku и периода Tu, которые используются в описанном выше методе.
5. Использование программного обеспечения:
Для настройки ПИД-регулятора и оптимизации контура доступны пакеты программного обеспечения. Эти программные пакеты собирают данные и создают математическую модель системы. По этой модели программное обеспечение находит оптимальный параметр настройки на основе эталонных изменений.
Структура ПИД-регулятора:
ПИД-регуляторы разработаны на основе микропроцессорной технологии. Разные производители используют разную структуру и уравнение PID. Чаще всего используется Уравнения PID; параллельное, идеальное и последовательное уравнение ПИД-регулятора .
В параллельном ПИД-уравнении пропорциональное, интегральное и производное действия работают отдельно друг от друга, и в системе действует комбинированный эффект этих трех действий. Блок-схема этого типа PID показана ниже;
В идеальном уравнении ПИД-регулятора константа усиления k p распределяется на все члены. Таким образом, изменение k p влияет на все остальные члены уравнения.
В уравнении ПИД серии константа усиления k p распределяется на все члены так же, как и в идеальном уравнении ПИД, но в этом уравнении интегральная и производная константы влияют на пропорциональное действие.
Применение ПИД-регулятора:
Регулирование температуры:
Возьмем в качестве примера кондиционер любого завода/процесса. Заданной точкой является температура (20°C), а текущая температура, измеренная датчиком, составляет 28°C. Наша цель состоит в том, чтобы поддерживать переменный ток при желаемой температуре (20°C). Теперь контроллер АС формирует сигнал по ошибке (8 °С) и этот сигнал подается на АС. По этому сигналу изменяется выход переменного тока и температура снижается до 25 °С. Далее такой же процесс будет повторяться до тех пор, пока датчик температуры не измерит требуемую температуру. Когда ошибка равна нулю, контроллер подает команду на остановку переменного тока, и снова температура увеличивается до определенного значения, и снова возникает ошибка, и тот же процесс повторяется непрерывно.
Разработка контроллера заряда MPPT (отслеживание точки максимальной мощности) для фотоэлектрических солнечных батарей:
ВАХ фотоэлемента зависит от температуры и уровня освещенности. Таким образом, рабочее напряжение и ток будут непрерывно изменяться в зависимости от изменения атмосферных условий. Поэтому очень важно отслеживать точку максимальной мощности для эффективной фотоэлектрической системы. Чтобы найти MPPT, используется ПИД-регулятор, и для этого контроллеру задаются заданные значения тока и напряжения. Если атмосферные условия изменятся, этот трекер поддерживает постоянное напряжение и ток.
Таким образом, рабочее напряжение и ток будут непрерывно изменяться в зависимости от изменения атмосферных условий. Поэтому очень важно отслеживать точку максимальной мощности для эффективной фотоэлектрической системы. Чтобы найти MPPT, используется ПИД-регулятор, и для этого контроллеру задаются заданные значения тока и напряжения. Если атмосферные условия изменятся, этот трекер поддерживает постоянное напряжение и ток.
Преобразователь силовой электроники:
ПИД-регулятор наиболее полезен в приложениях силовой электроники, таких как преобразователи. Если преобразователь подключен к системе, в соответствии с изменением нагрузки выход преобразователя должен измениться. Например, инвертор подключен к нагрузке, при увеличении нагрузки от инвертора будет течь больший ток. Таким образом, параметры напряжения и тока не являются фиксированными, они будут изменяться в соответствии с требованиями. В этом состоянии ПИД-регулятор используется для генерации ШИМ-импульсов для переключения IGBT инвертора.