
Принцип работы ПИД-регуляторов
MaxPlant
Принцип работы
Регуляторы процесса
Регуляторы процесса (Process Controllers) – это параметрируемые цифровые контроллеры со встроенным набором стандартных функций для регулирования технологических переменных (температуры, давления и т.п.).
В качестве сигналов задания (Reference) могут использоваться как фиксированные уставки (Fixed Setpoints), так и внешние (External).
Аналоговые входы используются для подключения датчиков обратной связи (термометров сопротивления, термопар, манометров и т.п.).
Дискретные входы используются для задания фиксированных уставок и переключения между режимами.
Дискретные выходы используются для сигнализации: готовности, аварий, состояния.
Релейные выходы используются для дискретного управления, а аналоговые выходы – для непрерывного управления.
Дискретное управление
- 2-х позиционный регулятор использует только 2 состояния:
- включено (открыто)
- выключено (закрыто) Пример: управление нагреванием или охлаждением.
- 3-х позиционный регулятор использует 3 состояния:
- выключено
- вращение по часовой стрелке
- вращение против часовой стрелки (реверс) Пример: управление реверсивным электродвигателем.
- 5-и позиционный регулятор использует 5 состояний:
- выключено
- вращение на первой скорости по часовой стрелке
- вращение на второй скорости по часовой стрелке
- вращение на первой скорости против часовой стрелки
- вращение на второй скорости против часовой стрелки Пример: управление 2-скоростным реверсивным двигателем.
Непрерывное управление
Для непрерывного управления используются ПИД-регуляторы.
Возможна реализация каскадного (подчинённого) управления.
Замкнутая система управления
Переходный процесс
Переходный процесс – это реакция системы на внешнее воздействие (задание, возмущение).
Неустойчивый (расходящийся) переходный процесс
Устойчивый (сходящийся) переходный процесс
| Колебательный | Апериодический | Монотонный |
ПИД-регулятор
С помощью настройки ПИД-регулятора (PID-controller) мы можем скорректировать переходный процесс так, как нам нужно для решения своей задачи.
Хзад – заданное (желаемое) значение выходной переменной
Xmax – верхний допустимый предел выходной переменной
Xmin – нижний допустимый предел выходной переменной
Т – период колебаний
Тн – время нарастания
Тр – время переходного процесса (последняя точка пересечения кривой с X
А1 – первое перерегулирование
А2 – второе перерегулирование
d=А1/A2 – степень (декремент) затухания переходного процесса (отношение первого перерегулирования ко второму)
Рассогласование, перерегулирование, время нарастания, время переходного процесса, степень
затухания характеризуют качество регулирования.
Пример
ПИД-регулятор открывает и закрывает регулирующий вентиль на горячей трубе так, чтобы из крана текла вода с температурой +40°С с погрешностью плюс-минус 2 градуса. Регулятор вычисляет рассогласование (ошибку) – отклонение реальной температуры (например, +20°С) от заданного значения (+40°С) и решает – когда и насколько необходимо приоткрыть горячий вентиль, чтобы температура повысилась на 20С. Реальную (фактическую) температуру регулятор узнаёт с помощью датчика температуры (обратная связь), а заданную температуру (уставку) ему сообщает оператор, например, набирая число «40» на своём ПК.
Чтобы настроить ПИД-регулятор, необходимо подобрать правильную комбинацию трёх коэффициентов:
- Пропорционального – Kp
- Интегрального – Ki
- Дифференциального – Kd
Могут использоваться и более простые – П и ПИ-регуляторы.
Формула ПИД-регулятора
где e(t) – ошибка (рассогласование), u(t) – выходной сигнал регулятора (управляющее воздействие).
Чем больше Пропорциональный коэффициент, тем выше быстродействие, но меньше запас устойчивости. Но! простой П-регулятор не может полностью отработать рассогласование, т.е. всегда работает с ошибкой.
ПИ-регулятор позволяет избавиться от статической (установившейся) ошибки, но, чем больше Интегральный коэффициент, тем больше перерегулирование (динамическая ошибка).
ПИД-регулятор позволяет нам уменьшить перерегулирование, но, чем больше Дифференциальный коэффициент, тем больше погрешность из-за влияния шумов.
Если шумы идут по каналу обратной связи, то мы можем их отфильтровать с помощью фильтра низкой частоты, но чем больше постоянная этого фильтра, тем медленнее регулятор будет отрабатывать возмущения.
Настройка ПИД-регулятора по методу Циглера-Николса
Циглер и Николс предложили свой вариант быстрой настройки ПИД-регулятора для периодического переходного процесса,
в котором затухание примерно равно 4.
- Обнуляем Ki и Kd
- Постепенно увеличиваем Kp до критического значения K c, при котором возникают автоколебания
- Измеряем период автоколебаний Т
- Вычисляем значения Kp, Ki и Kd по разным формулам для разных регуляторов:
- для П-регулятора: Kp=0,50*Kc
- для ПИ-регулятора: Kp=0,45*Kc, Ki=1,2*Kp/T
- для ПИД-регулятора: Kp=0,60*Kc, Ki=2,0*Kp/T, Kd=Kp*T/8
Каскадный регулятор (подчинённое управление)
Продолжение примера
Теперь нам захотелось добавить комфорта и сделать так, чтобы уставка задания температуры воды менялась
в зависимости от температуры воздуха на улице (на улице мороз – вода горячая, на улице жара – вода прохладная).
Можно установить ещё один регулятор комфортной температуры, который по показаниям термометра узнаёт
фактическую температура наружного воздуха и решает, что комфортная температура воды должна быть, например, +40°С,
поэтому он выдаёт задание регулятору температуры воды – поддерживать температуру на уровне +40С (см.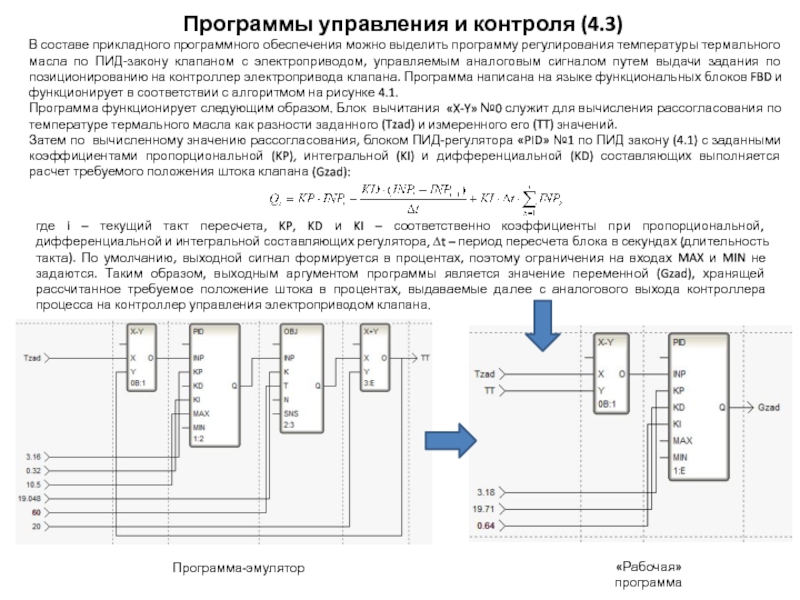
С помощью регуляторов процесса мы можем реализовать и более сложные связи. Например, поддерживать постоянный расход и температуру воды, независимо от давления и температуры горячего и холодного трубопроводов.
Упреждающее регулирование (Feedforward Control)
Не всегда простой ПИД-регулятор в системе с обратной связью может обеспечить требуемое быстродействие
из-за возникновения нежелательных колебаний или недопустимо большого перерегулирования.
Для улучшения характеристик регулирования применяют комбинированное управление – с обратной связью
(closed-loop) и без обратной связи (open-loop). К управляющему воздействию (выходу регулятора)
добавляется сигнал упреждающего воздействия, который не зависит от рассогласования, а значит,
не может вызвать автоколебания в системе.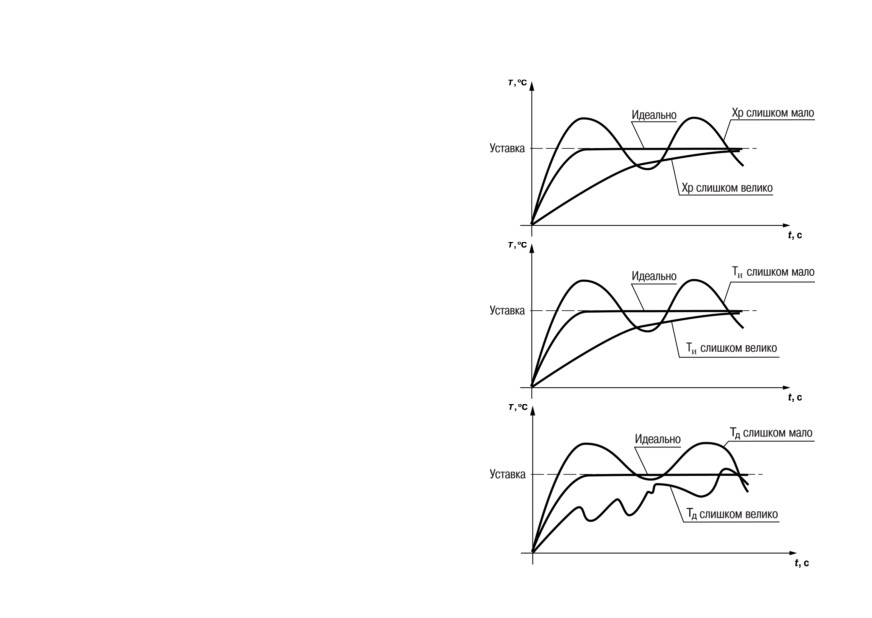
Продолжение примера
Если мы доверяем прогнозу погоды, то вместо каскадного управления мы можем реализовать упреждающее регулирование без измерения уличной температуры: читаем прогноз на завтра, задаём уставку +40°С по таймеру времени на завтра на 7 утра.Если измерить возмущение, то можно подать упреждающее воздействие, которое компенсирует влияние этого возмущения на процесс до того, как начнёт изменяться регулируемый параметр.
Как выбрать
Окружающая среда
- Температура
- Влажность
- Класс взрывозащиты
- Степень защиты корпуса.
Регулирование
- Тип регулятора
- Дискретный
- 2-х позиционный
- 3-х позиционный
- Непрерывный
- П-регулятор
- ПИ-регулятор
- ПИД-регулятор.
- Дополнительные функции:
- Каскадный регулятор (подчинённое управление)
- Упреждающее регулирование (Feedforward Control).

- Количество контуров регулирования.
Коммуникационный интерфейс
- HART
- FOUNDATION Fieldbus
- PROFIBUS PA.
Производители систем ЧПУ и промышленных роботов
Системы ЧПУ
принцип работы для начинающих, теория и практика
Обновлено: 02.04.2023
ПИД (от англ. P-proportional, I-integral, D-derivative) — регулятором называется устройство, применяемое в контурах управления, оснащенных звеном обратной связи. Данные регуляторы используют для формирования сигнала управления в автоматических системах, где необходимо достичь высоких требований к качеству и точности переходных процессов.
Управляющий сигнал ПИД-регулятора получается в результате сложения трех составляющих: первая пропорциональна величине сигнала рассогласования, вторая — интегралу сигнала рассогласования, третья — его производной. Если какой-то из этих трех компонентов не включен в процесс сложения, то регулятор будет уже не ПИД, а просто пропорциональным, пропорционально-дифференцирующим или пропорционально-интегрирующим.
Если какой-то из этих трех компонентов не включен в процесс сложения, то регулятор будет уже не ПИД, а просто пропорциональным, пропорционально-дифференцирующим или пропорционально-интегрирующим.
Первый компонент — пропорциональный
Выходной сигнал дает пропорциональная составляющая. Сигнал этот приводит к противодействию текущему отклонению входной величины, подлежащей регулированию, от установленного значения. Чем больше отклонение — тем больше и сигнал. Когда на входе значение регулируемой величины равно заданному, то выходной сигнал становится равным нулю.
Если оставить только эту пропорциональную составляющую, и использовать только ее, то значение величины, подлежащей регулированию, не стабилизируется на правильном значении никогда. Всегда есть статическая ошибка, равная такому значению отклонения регулируемой величины, что выходной сигнал стабилизируется на этом значении.
К примеру, терморегулятор управляет мощностью нагревательного прибора. Выходной сигнал уменьшается по мере приближения требуемой температуры объекта, и сигнал управления стабилизирует мощность на уровне тепловых потерь. В итоге заданного значения температура так и не достигнет, ибо нагревательный прибор в просто должен будет быть выключен, и начнет остывать (мощность равна нулю).
В итоге заданного значения температура так и не достигнет, ибо нагревательный прибор в просто должен будет быть выключен, и начнет остывать (мощность равна нулю).
Больше коэффициент усиления между входом и выходом — меньше статическая ошибка, но если коэффициент усиления (по сути — коэффициент пропорциональности) будет слишком большим, то при условии наличия задержек в системе (а они зачастую неизбежны), в ней вскоре начнутся автоколебания, а если увеличить коэффициент еще больше — система попросту утратит устойчивость.
Или пример позиционирования двигателя с редуктором. При малом коэффициенте нужное положение рабочего органа достигается слишком медленно. Увеличить коэффициент — реакция получится более быстрая. Но если увеличивать коэффициент дальше, то двигатель «перелетит» правильную позицию, и система не перейдет быстро к требуемому положению, как хотелось бы ожидать. Если теперь увеличивать коэффициент пропорциональности дальше, то начнутся осцилляции около нужной точки — результат снова не будет достигнут.
Второй компонент – интегрирующий
Интеграл по времени от величины рассогласования — есть основная часть интегрирующей составляющей. Она пропорциональна этому интегралу. Интегрирующий компонент используется как раз для исключения статической ошибки, поскольку регулятор со временем учитывает статическую погрешность.
В отсутствие внешних возмущений, через какое-то время подлежащая регулированию величина будет стабилизирована на правильном значении, когда пропорциональная составляющая окажется равной нулю, и точность выхода будет целиком обеспечена интегрирующей составляющей. Но интегрирующая составляющая тоже может породить осцилляции около точки позиционирования, если коэффициент не подобран правильно.
Третий компонент — дифференцирующий
Темпу изменения отклонения величины, подлежащей регулированию, пропорциональна третья — дифференцирующая составляющая. Она необходима для того, чтобы противодействовать отклонениям (вызванным внешними воздействиями или задержками) от правильного положения, прогнозируемого в будущем.
Что такое ПИД простыми словами на примере дрона:
Теория работы ПИД-регулятора
Как вы уже поняли, ПИД-регуляторы применяют для поддержания заданного значения х0 некоторой одной величины, благодаря изменению значения u другой величины. Есть уставка или заданное значение х0, и есть разность или невязка (рассогласование) е = х0-х. Если система линейна и стационарна (практически это вряд ли возможно), то для задания u справедливы нижеследующие формулы:
В этой формуле вы видите коэффициенты пропорциональности для каждого из трех слагаемых.
Практически в ПИД-регуляторах используют для настройки другую формулу, где коэффициент усиления применен сразу ко всем компонентам:
Практическая сторона ПИД-регулирования
Практически теоретический анализ ПИД-регулируемых систем редко применяют. Сложность состоит в том, что характеристики объекта управления неизвестны, и система практически всегда нестационарна и нелинейна.
Реально работающие ПИД-регуляторы всегда имеют ограничение рабочего диапазона снизу и сверху, это принципиально объясняет их нелинейность. Настройка поэтому практически всегда и везде производится экспериментальным путем, когда объект управления подключен к системе управления.
Настройка поэтому практически всегда и везде производится экспериментальным путем, когда объект управления подключен к системе управления.
Использование величины, формируемой программным алгоритмом управления, обладает рядом специфических нюансов. Если речь, например, о регулировке температуры, то часто требуется все же не одно, а сразу два устройства: первое управляет нагревом, второе — охлаждением. Первое подает разогретый теплоноситель, второе — хладагент. Три варианта практических решений может быть рассмотрено.
Первый — близок к теоретическому описанию, когда выход – аналоговая и непрерывная величина. Второй — выход в форме набора импульсов, например для управления шаговым двигателем. Третий — ШИМ-управление, когда выход с регулятора служит для задания ширины импульсов.
Сегодня системы автоматизации практически все строятся на основе ПЛК, и ПИД-регуляторы представляют собой специальные модули, добавляемые к управляющему контроллеру или вообще реализуемые программно путем загрузки библиотек. Для правильной настройки коэффициентов усиления в таких контроллерах, их разработчики предоставляют специальное ПО.
Для правильной настройки коэффициентов усиления в таких контроллерах, их разработчики предоставляют специальное ПО.
Structured Text
Представляем книгу по Structured Text (ST) МЭК 61131-3. Автор – Сергей Романов
Пропорционально-интегрально-дифференцирующие (ПИД) регуляторы находят широкое применение для управления промышленными процессами. ПИД-регулятор формирует управляющий сигнал, являющийся суммой трёх слагаемых, первое из которых пропорционально разности входного сигнала и сигнала обратной связи (сигнал рассогласования), второе — интеграл сигнала рассогласования, третье — производная сигнала рассогласования.
Работа ПИД-регулятора
При использовании двухпозиционного регулирования возможны только два состояния управления, например, включено/выключено или открыто/закрыто. Для предотвращения «дребезга» управляющего выходного устройства и исполнительного механизма вблизи задания SP предусматривается гистерезис Точность такого регулирования зависит от величины гистерезиса.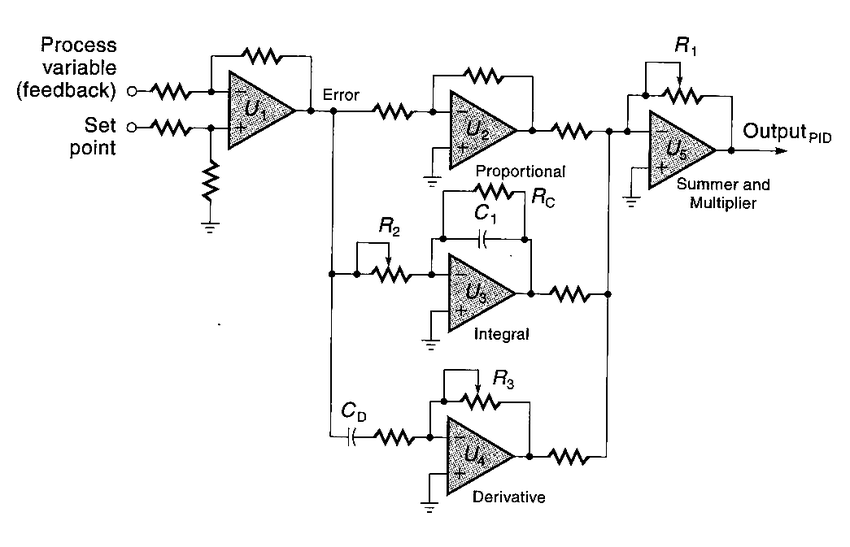 Чем меньше гистерезис, тем точнее регулирование, но тем чаще включается оборудование и тем самым больше износ коммутационных элементов (например, реле).
Чем меньше гистерезис, тем точнее регулирование, но тем чаще включается оборудование и тем самым больше износ коммутационных элементов (например, реле).
ПИД-регулятор избавлен данных недостатков. Он поддерживает выходной сигнал таким образом, что между переменной процесса и заданной точкой была нулевая ошибка. ПИД использует три основных составляющих, которые объясняются ниже.
П-регулятор:
Пропорциональный или П-регулятор вырабатывает выходной сигнал, который пропорционален текущей ошибке e (t). Он сравнивает заданную уставку с фактическим значением. Полученная ошибка умножается на коэффициент усиление пропорциональной составляющей, чтобы получить выходной сигнал.
Однако при использовании только пропорционального регулятора значение регулируемой величины никогда не стабилизируется на заданном значении. Существует так называемая статическая ошибка, которая равна такому отклонению регулируемой величины, которое обеспечивает выходной сигнал, стабилизирующий выходную величину именно на этом значении. Чем больше коэффициент пропорциональности между входным и выходным сигналом (коэффициент усиления), тем меньше статическая ошибка, однако при слишком большом коэффициенте усиления при наличии задержек (запаздывания) в системе могут начаться автоколебания, а при дальнейшем увеличении коэффициента система может потерять устойчивость.
Чем больше коэффициент пропорциональности между входным и выходным сигналом (коэффициент усиления), тем меньше статическая ошибка, однако при слишком большом коэффициенте усиления при наличии задержек (запаздывания) в системе могут начаться автоколебания, а при дальнейшем увеличении коэффициента система может потерять устойчивость.
ПИ-регулятор
Из-за ограничений П-регулятора, где всегда существует статическая ошибка между переменной процесса и заданным значением, необходима интегрирующая составляющая, которая обеспечивает необходимые действия для устранения ошибки установившегося состояния. Интегрирующая составляющая пропорциональна интегралу по времени от отклонения регулируемой величины.
Если система не испытывает внешних возмущений, то через некоторое время регулируемая величина стабилизируется на заданном значении, сигнал пропорциональной составляющей будет равен нулю, а выходной сигнал будет полностью обеспечиваться интегрирующей составляющей. Тем не менее, интегрирующая составляющая также может приводить к автоколебаниям при неправильном выборе её коэффициента.
ПИД-регулятор
ПИ-регулятор не может предсказать будущее поведение ошибки Дифференциальная составляющая пропорциональна темпу изменения отклонения регулируемой величины и предназначена для противодействия отклонениям от целевого значения, которые прогнозируются в будущем. Отклонения могут быть вызваны внешними возмущениями или запаздыванием воздействия регулятора на систему. Его выход зависит от скорости изменения погрешности за время, умноженное на постоянную производной.
Таким образом, в зависимости от ситуации могут применятся П-, ПД-, ПИ- и ПИД-регуляторы, но основным законом управления в основном является пропорциональный (хотя в некоторых специфических задачах и могут использоваться исключительно только звенья дифференциаторов и интеграторов).
Дифференциальный пропорционально-интегральный регулятор — устройство, которое устанавливают в автоматизированных системах для поддержания заданного параметра, способного к изменениям.
На первый взгляд все запутанно, но можно объяснить ПИД регулирование и для чайников, т. е. людей, не совсем знакомых с электронными системами и приборами.
е. людей, не совсем знакомых с электронными системами и приборами.
Что такое ПИД регулятор?
ПИД регулятор — прибор, встроенный в управляющий контур, с обязательной обратной связью. Он предназначен для поддержания установленных уровней задаваемых величин, например, температуры воздуха.
Устройство подает управляющий или выходной сигнал на устройство регулирования, на основании полученных данных от датчиков или сенсоров. Контроллеры обладают высокими показателями точности переходных процессов и качеством выполнения поставленной задачи.
Три коэффициента ПИД регулятора и принцип работы
Работа ПИД-регулятора заключается в подаче выходного сигнала о силе мощности, необходимой для поддержания регулируемого параметра на заданном уровне. Для вычисления показателя используют сложную математическую формулу, в составе которой есть 3 коэффициента — пропорциональный, интегральный, дифференциальный.
Возьмем в качестве объекта регулирования ёмкость с водой, в которой необходимо поддерживать температуру на заданном уровне с помощью регулирования степени открытия клапана с паром.
Пропорциональная составляющая появляется в момент рассогласования с вводными данными. Простыми словами это звучит так — берется разница между фактической температурой и желаемой, умножается на настраиваемый коэффициент и получается выходной сигнал, который должен подаваться на клапан. Т.е. как только градусы упали, запускается процесс нагрева, поднялись выше желаемой отметки — происходит выключение или даже охлаждение.
Дальше вступает интегральная составляющая, которая предназначена для того, чтобы компенсировать воздействие окружающей среды или других возмущающих воздействий на поддержание нашей температуры на заданном уровне. Поскольку всегда присутствуют дополнительные факторы, влияющие на управляемые приборы, в момент поступления данных для вычисления пропорциональной составляющей, цифра уже меняется. И чем больше внешнее воздействие, тем сильнее происходят колебания показателя. Происходят скачки подаваемой мощности.
Интегральная составляющая пытается на основе прошлых значений температуры, вернуть её значение, если оно поменялось. Подробнее процесс описан в видео ниже.
Подробнее процесс описан в видео ниже.
А дальше выходной сигнал регулятора, согласно коэффициенту, подается для повышения или понижения температуры. Со временем подбирается та величина, которая компенсирует внешние факторы, и скачки исчезают.
Интеграл используется для исключения ошибок путем расчета статической погрешности. Главное в этом процессе — подобрать правильный коэффициент, иначе ошибка (рассогласование) будет влиять и на интегральную составляющую.
Читайте также:
- Умный монтажный пистолет Hilti BX3 что нового – обзор недостатков и достоинств. Техника прямого монтажа от Хилти.
- Какой кабель использовать для проводки в квартире: для освещения и для розеток, марки проводов, сечение
- Электрический ток: в чем измеряется и что представляет собой, виды электротока и его применение
ПИД-регулятор и объяснение теории
Основная идея ПИД-регулятора состоит в том, чтобы считывать показания датчика, затем вычислять требуемый выходной сигнал исполнительного механизма, вычисляя пропорциональные, интегральные и производные отклики и суммируя эти три компонента для вычисления выходного сигнала.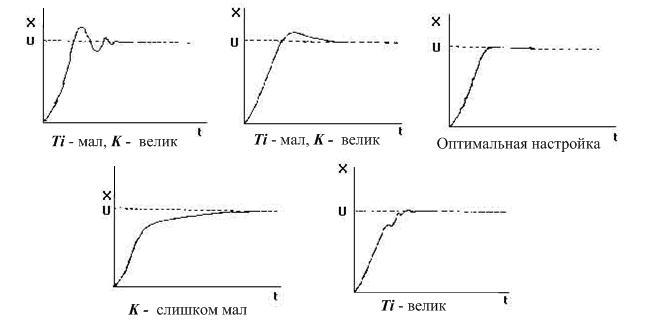 Прежде чем мы начнем определять параметры ПИД-регулятора, мы увидим, что такое система с замкнутым контуром, и некоторые связанные с ней термины.
Прежде чем мы начнем определять параметры ПИД-регулятора, мы увидим, что такое система с замкнутым контуром, и некоторые связанные с ней термины.
Замкнутая система
В типичной системе управления переменная процесса — это системный параметр, который необходимо контролировать, например, температура (ºC), давление (psi) или скорость потока (литры/мин). Датчик используется для измерения переменной процесса и обеспечения обратной связи с системой управления. Уставка — это желаемое или заданное значение переменной процесса, например 100 градусов Цельсия в случае системы контроля температуры. В любой момент времени разница между переменной процесса и заданным значением используется алгоритмом системы управления 9.0009 (компенсатор) , чтобы определить желаемую выходную мощность привода для управления системой (установкой). Например, если измеренная переменная процесса температуры составляет 100 ºC, а желаемая уставка температуры составляет 120 ºC, то выход привода , заданный алгоритмом управления, может управлять нагревателем. Приведение в действие исполнительного механизма для включения нагревателя приводит к тому, что система нагревается, что приводит к увеличению технологической переменной температуры. Это называется системой управления с замкнутым контуром, потому что процесс считывания показаний датчиков для обеспечения постоянной обратной связи и расчета требуемой выходной мощности исполнительного механизма повторяется непрерывно и с фиксированной скоростью цикла, как показано на рисунке 1.9.0004
Приведение в действие исполнительного механизма для включения нагревателя приводит к тому, что система нагревается, что приводит к увеличению технологической переменной температуры. Это называется системой управления с замкнутым контуром, потому что процесс считывания показаний датчиков для обеспечения постоянной обратной связи и расчета требуемой выходной мощности исполнительного механизма повторяется непрерывно и с фиксированной скоростью цикла, как показано на рисунке 1.9.0004
Во многих случаях выход привода — не единственный сигнал, влияющий на систему. Например, в температурной камере может быть источник холодного воздуха, который иногда дует в камеру и нарушает температуру. Такой термин обозначается как возмущение . Обычно мы пытаемся спроектировать систему управления так, чтобы свести к минимуму влияние возмущений на переменную процесса.
Рис. 1: Блок-схема типичной замкнутой системы.
Определение терминов
Процесс разработки системы управления начинается с определения требований к производительности. Производительность системы управления часто измеряется путем применения ступенчатой функции в качестве командной переменной уставки, а затем измерения отклика переменной процесса. Обычно ответ определяется количественно путем измерения определенных характеристик сигнала. Время нарастания — это количество времени, которое требуется системе для перехода от 10% к 90% установившегося или конечного значения. Процент превышения — это величина превышения переменной процесса конечного значения, выраженная в процентах от конечного значения. Время установления — это время, необходимое для того, чтобы переменная процесса установилась в пределах определенного процента (обычно 5 %) от конечного значения. Установившаяся ошибка — это окончательная разница между переменной процесса и заданным значением. Обратите внимание, что точное определение этих величин будет различаться в промышленности и научных кругах.
Производительность системы управления часто измеряется путем применения ступенчатой функции в качестве командной переменной уставки, а затем измерения отклика переменной процесса. Обычно ответ определяется количественно путем измерения определенных характеристик сигнала. Время нарастания — это количество времени, которое требуется системе для перехода от 10% к 90% установившегося или конечного значения. Процент превышения — это величина превышения переменной процесса конечного значения, выраженная в процентах от конечного значения. Время установления — это время, необходимое для того, чтобы переменная процесса установилась в пределах определенного процента (обычно 5 %) от конечного значения. Установившаяся ошибка — это окончательная разница между переменной процесса и заданным значением. Обратите внимание, что точное определение этих величин будет различаться в промышленности и научных кругах.
Рис. 2: Реакция типичной замкнутой системы ПИД-регулятора.
После использования одной или всех этих величин для определения требований к производительности системы управления полезно определить наихудшие условия, при которых ожидается, что система управления будет соответствовать этим проектным требованиям. Часто в системе возникает возмущение, которое влияет на переменную процесса или измерение переменной процесса. Важно разработать систему управления, которая удовлетворительно работает в наихудших условиях. Мера того, насколько хорошо система управления способна преодолевать последствия возмущений, называется 9.0009 Подавление помех системы управления.
В некоторых случаях реакция системы на заданный управляющий выход может меняться со временем или в зависимости от какой-либо переменной. Нелинейная система представляет собой систему, в которой параметры управления, дающие желаемую реакцию в одной рабочей точке, могут не дать удовлетворительной реакции в другой рабочей точке. Например, камера, частично заполненная жидкостью, будет демонстрировать гораздо более быструю реакцию на мощность нагревателя, когда она почти пуста, чем когда она почти заполнена жидкостью. Мера того, насколько хорошо система управления будет выдерживать помехи и нелинейности, называется надежность системы управления.
Мера того, насколько хорошо система управления будет выдерживать помехи и нелинейности, называется надежность системы управления.
Некоторые системы демонстрируют нежелательное поведение, называемое deadtime . Мертвое время — это задержка между изменением переменной процесса и моментом, когда это изменение можно наблюдать. Например, если датчик температуры расположен далеко от впускного клапана для холодной воды, он не будет измерять изменение температуры немедленно, если клапан открыт или закрыт. Время простоя также может быть вызвано системой или выходным приводом, который медленно реагирует на управляющую команду, например, клапан, который медленно открывается или закрывается. Распространенным источником простоя на химических заводах является задержка, вызванная потоком жидкости по трубам.
Цикл цикла также является важным параметром замкнутой системы. Интервал времени между вызовами алгоритма управления является временем цикла цикла. Системы, которые быстро изменяются или имеют сложное поведение, требуют более высоких скоростей контура управления.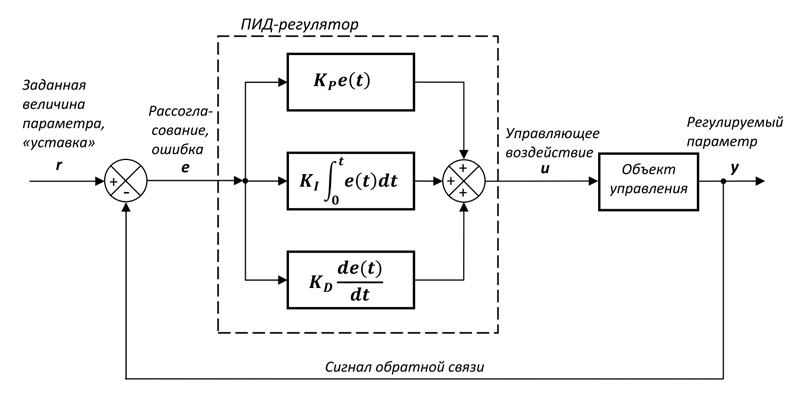
Рис. 3: Реакция замкнутой системы с мертвым временем.
После определения требований к производительности настало время изучить систему и выбрать соответствующую схему управления. В подавляющем большинстве приложений ПИД-регулятор обеспечивает требуемые результаты
Работа и приложения — StudiousGuy
ПИД, этот термин означает пропорциональную интегральную производную. ПИД-регулятор обычно использует устройство управления с обратной связью с обратной связью, которое помогает контролировать и регулировать различные параметры процесса, включая давление, температуру, скорость, расход и т. д. ПИД-регулятор используется на заводах и в промышленности в относительно больших масштабах. контролировать различные виды деятельности. Первый ПИД-регулятор был изобретен американским изобретателем и предпринимателем Элмером Амброузом Сперри-старшим в 1911. Автоматические ПИД-регуляторы были представлены для промышленного и коммерческого использования в середине 1950-х годов.
Указатель статей (щелкните, чтобы перейти)
Структура и блок-схема ПИД-регулятора
Структура ПИД-регулятора обычно включает три элемента управления, а именно пропорциональное, интегральное и производное управление. Эти три контроллера ПИД-регулятора используются для создания комбинированного выходного сигнала, который используется для формирования стратегии управления, которая дополнительно управляет работой устройства и манипулирует физическими параметрами, такими как температура, давление и т. д. Блок ПИД-регулятора передает вывод в блок процесса. Блок процесса или установки содержит основные устройства управления, такие как исполнительные механизмы, регулирующие клапаны и т. д. Блок обратной связи принимает текущий входной сигнал и сравнивает его с эталонным сигналом или заданным значением для получения сигнала ошибки. Затем этот сигнал ошибки подается на алгоритм PID. Комбинированный ответ или управляемый сигнал затем подается на устройства управления, установленные на установке. ПИД-регулятор не обязательно состоит из обеих трех переменных управления. Комбинация ПИ- и ПД-регуляторов довольно часто используется для управления различными процессами в промышленности или на предприятии.
ПИД-регулятор не обязательно состоит из обеих трех переменных управления. Комбинация ПИ- и ПД-регуляторов довольно часто используется для управления различными процессами в промышленности или на предприятии.
Работа ПИД-регулятора
ПИД-регулятор обычно работает по принципу регулировки или настройки пропорциональных, интегральных или производных составляющих. Разница между этими переменными оценивается, и часть входного сигнала возвращается на устройство в качестве управляющего сигнала обратной связи. Это значение обычно называют поправочным коэффициентом. Например, если кондиционер не производит достаточно холодного воздуха, то контроллер оценивает поправочный коэффициент, т. е. разницу между температурой в помещении и желаемой температурой, и возвращает ее на устройство. Затем внутренний механизм устройства снижает температуру до тех пор, пока не будет достигнута минимальная разница между желаемым и результирующим значением. Точно так же в случае с духовкой, если не вырабатывается достаточное количество тепла, температура регулируется, а тепло увеличивается.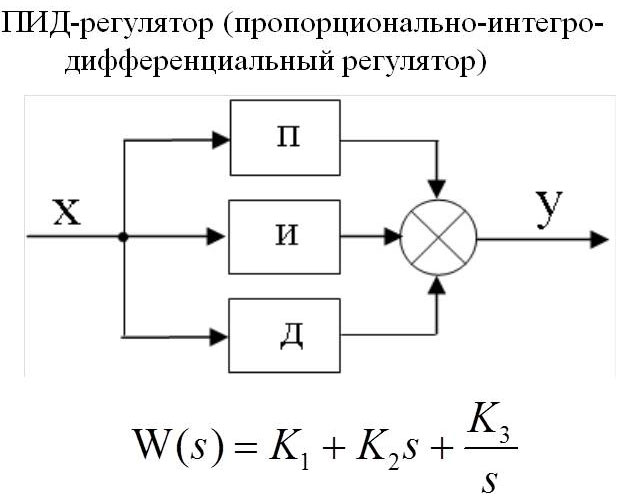 Обычно существует три шага для настройки физических параметров, таких как температура, расход и давление, в соответствии с требованиями. К ним относятся пропорциональная настройка, интегральная настройка и настройка по производной.
Обычно существует три шага для настройки физических параметров, таких как температура, расход и давление, в соответствии с требованиями. К ним относятся пропорциональная настройка, интегральная настройка и настройка по производной.
Пропорциональная настройка
Этот тип настройки включает настройку или коррекцию полезного сигнала, пропорционального текущему сигналу ошибки e(t). Сигнал ошибки представляет собой разницу между заданным или заданным значением и фактическим значением. Текущий сигнал ошибки дополнительно умножается на предварительно вычисленную пропорциональную константу для получения выходного сигнала. Если значение ошибки равно нулю, выходное значение контроллера также равно нулю. Здесь желаемое значение редко достигается, поскольку оно никогда не достигает стационарного состояния. Устройства управления, которые используют пропорциональную настройку или p-регуляторы, обеспечивают стабильную работу, но имеют тенденцию поддерживать установившуюся ошибку. Константа пропорциональности напрямую сравнима со скоростью отклика устройства. Это означает, что при увеличении пропорциональной константы Kc соответственно увеличивается скорость отклика. Если этот тип контроллера не используется в сочетании с другим типом контроллера, требуется ручной сброс и правильное смещение.
Это означает, что при увеличении пропорциональной константы Kc соответственно увеличивается скорость отклика. Если этот тип контроллера не используется в сочетании с другим типом контроллера, требуется ручной сброс и правильное смещение.
Интегральная настройка
Контроллеры «P» или контроллеры, использующие пропорциональную настройку, подвержены ограничению, заключающемуся в том, что всегда существует установившаяся ошибка, которая является смещением между уставкой и переменной процесса обратной связи. . Этот тип ограничения может быть устранен путем использования I-контроллеров. I-контроллеры используют интегральную настройку для генерации выходного сигнала для управления различными физическими параметрами. Этот тип настройки имеет тенденцию интегрировать сигнал ошибки по времени до тех пор, пока не будет достигнуто минимальное или нулевое значение ошибки. В случае отрицательного значения ошибки интегральное управление стремится уменьшить выход. Скорость отклика и стабильность системы; тем не менее, получить воздействие во время процесса. ПИ-регулятор восприимчив к интегральным условиям насыщения из-за нелинейностей, присутствующих в объекте. При этом условии интегральный выход продолжает увеличиваться даже при нулевом состоянии ошибки. Чтобы преодолеть этот недостаток, выход I-регулятора ограничен определенным диапазоном. Интегральное усиление регуляторов «I», обычно обозначаемое Ki, косвенно пропорционально скорости отклика системы. Это означает, что при увеличении интегрального усиления быстродействие системы уменьшается на сопоставимую величину. Точно так же интегральное усиление прямо пропорционально установившейся ошибке. Это означает, что установившаяся ошибка уменьшается за счет уменьшения интегрального коэффициента усиления контроллера и наоборот. ПИ-контроллеры обычно используются в приложениях, где большое время отклика системы не имеет первостепенного значения.
ПИ-регулятор восприимчив к интегральным условиям насыщения из-за нелинейностей, присутствующих в объекте. При этом условии интегральный выход продолжает увеличиваться даже при нулевом состоянии ошибки. Чтобы преодолеть этот недостаток, выход I-регулятора ограничен определенным диапазоном. Интегральное усиление регуляторов «I», обычно обозначаемое Ki, косвенно пропорционально скорости отклика системы. Это означает, что при увеличении интегрального усиления быстродействие системы уменьшается на сопоставимую величину. Точно так же интегральное усиление прямо пропорционально установившейся ошибке. Это означает, что установившаяся ошибка уменьшается за счет уменьшения интегрального коэффициента усиления контроллера и наоборот. ПИ-контроллеры обычно используются в приложениях, где большое время отклика системы не имеет первостепенного значения.
Производная настройка
Регуляторы «D» или производная настройка обычно используются для преодоления определенных ограничений настройки «I». Например, «I»-контроллер не может предсказать будущее поведение значения ошибки. Такие устройства, как правило, работают нормально даже при изменении заданной фиксированной точки или требуемого значения. Выходной сигнал регуляторов производной равен скорости изменения сигнала ошибки по времени, умноженной на постоянную производной. Настройка производной помогает улучшить отклик системы и уменьшить время установления выходного сигнала. Коэффициент усиления производной Kd прямо пропорционален скорости отклика системы. Это означает, что увеличение коэффициента усиления по производной регулятора приводит к увеличению времени отклика системы.
Например, «I»-контроллер не может предсказать будущее поведение значения ошибки. Такие устройства, как правило, работают нормально даже при изменении заданной фиксированной точки или требуемого значения. Выходной сигнал регуляторов производной равен скорости изменения сигнала ошибки по времени, умноженной на постоянную производной. Настройка производной помогает улучшить отклик системы и уменьшить время установления выходного сигнала. Коэффициент усиления производной Kd прямо пропорционален скорости отклика системы. Это означает, что увеличение коэффициента усиления по производной регулятора приводит к увеличению времени отклика системы.
Типы ПИД-регуляторов
В зависимости от типа используемой системы управления ПИД-регуляторы можно разделить на три категории: двухпозиционные, пропорциональные и стандартные.
Управление ВКЛ/ВЫКЛ
Управление включением/выключением является одним из самых простых типов устройств, используемых для регулировки или настройки температуры в определенной области. Здесь контроллер стремится переключить устройство в состояние ВКЛ, как только выходной сигнал пересекает конкретную желаемую фиксированную точку. Одним из наиболее часто используемых устройств включения/выключения является ограничитель. Контроллер ограничения использует для своей работы реле с фиксацией. Реле должно управляться вручную. Температура или другой переменный параметр устанавливается на определенное значение. Устройство имеет тенденцию сохранять выключенное состояние, если выходной сигнал или результирующий сигнал отстает от целевого значения. Как только порог или заданное значение достигнуто, устройство включается.
Здесь контроллер стремится переключить устройство в состояние ВКЛ, как только выходной сигнал пересекает конкретную желаемую фиксированную точку. Одним из наиболее часто используемых устройств включения/выключения является ограничитель. Контроллер ограничения использует для своей работы реле с фиксацией. Реле должно управляться вручную. Температура или другой переменный параметр устанавливается на определенное значение. Устройство имеет тенденцию сохранять выключенное состояние, если выходной сигнал или результирующий сигнал отстает от целевого значения. Как только порог или заданное значение достигнуто, устройство включается.
ON OFF Характеристики управления
Пропорциональное управление
Пропорциональное управление в основном предназначено для преодоления и устранения циклического ограничения управления включением/выключением. Этот тип контроля запрещает контроллеру превышать конкретное предварительно определенное пороговое значение. Устройство стремится достичь желаемой точки, чтобы поддерживать значение физического параметра на постоянном уровне; однако он не превышает фиксированную пороговую точку.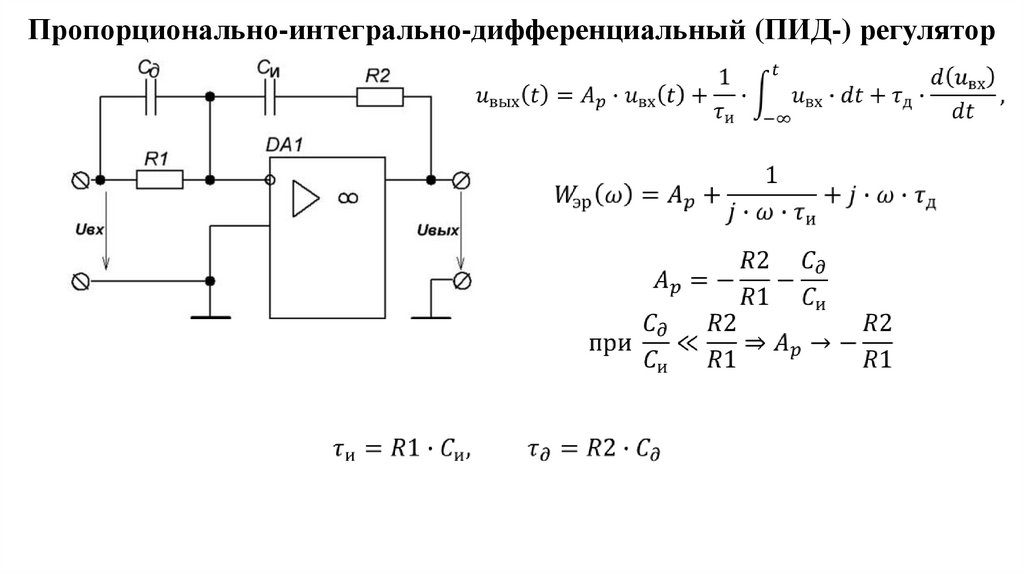 Например, нагреватель с пропорциональным регулированием поддерживает температуру на постоянном уровне и предотвращает перегрев. Когда температура нагревателя пытается превысить пороговое значение, срабатывает контроллер. Подача отключается, и температура устройства снижается.
Например, нагреватель с пропорциональным регулированием поддерживает температуру на постоянном уровне и предотвращает перегрев. Когда температура нагревателя пытается превысить пороговое значение, срабатывает контроллер. Подача отключается, и температура устройства снижается.
Характеристики пропорционального регулирования
ПИД-регулятор стандартного типа
ПИД-регуляторы стандартного типа используют комбинацию пропорционального управления с интегральным и дифференциальным управлением. Объединенный элемент управления помогает блоку обработки данных и помогает устройству автоматически производить манипуляции в системе и изменять переменные. Интегральные и производные модификации в этом случае выражаются в единицах времени. Эти контроллеры также упоминаются через их обратные значения, RATE и RESET, соответственно. Эти типы контроллеров обеспечивают более точное и стабильное управление по сравнению с другими контроллерами.
ПИД-регуляторы реального времени
ПИД-регуляторы реального времени чаще всего используются в коммерческих и практических целях. Устройства управления, которые используют ПИД-регуляторы в реальном времени, предоставляют различные варианты управления SOLO и двухконтурным управлением. Автономный тип ПИД-регуляторов имеет тенденцию обеспечивать различные конфигурации фиксированной точки для создания ряда автономных аварийных сигналов. Эти типы автономных контроллеров в основном включают ПИД-регуляторы, поставляемые Honeywell, контроллеры с автонастройкой от OMEGA, Siemens и ABB, контроллеры температуры от Yokogawa и различные другие. Расположение блоков PID обычно выполняется с помощью PLC или PAC. Здесь каждый PAC или PLC включает в себя блок PID в рамках алгоритма или программного обеспечения. Во многих промышленных приложениях ПЛК используются в качестве ПИД-регуляторов.
Устройства управления, которые используют ПИД-регуляторы в реальном времени, предоставляют различные варианты управления SOLO и двухконтурным управлением. Автономный тип ПИД-регуляторов имеет тенденцию обеспечивать различные конфигурации фиксированной точки для создания ряда автономных аварийных сигналов. Эти типы автономных контроллеров в основном включают ПИД-регуляторы, поставляемые Honeywell, контроллеры с автонастройкой от OMEGA, Siemens и ABB, контроллеры температуры от Yokogawa и различные другие. Расположение блоков PID обычно выполняется с помощью PLC или PAC. Здесь каждый PAC или PLC включает в себя блок PID в рамках алгоритма или программного обеспечения. Во многих промышленных приложениях ПЛК используются в качестве ПИД-регуляторов.
Применение ПИД-регулятора
ПИД-регулятор обычно используется в промышленности для управления или регулировки сложных физических параметров окружающей среды, таких как температура и давление. Его также можно использовать для поддержания этих параметров на постоянном уровне. Ниже перечислены некоторые из наиболее распространенных применений ПИД-регулятора:
Ниже перечислены некоторые из наиболее распространенных применений ПИД-регулятора:
1. ПИД-регулятор является неотъемлемой частью системы контроля температуры в промышленности. Обычно используется для контроля температуры в помещении. Здесь вход ПИД-регулятора поступает от датчика температуры, а выход подается на вентилятор или нагреватель. вентилятор или обогреватель; следовательно, действует как элемент управления. Скорость вентилятора или температура нагревателя регулируются в соответствии с сигналом обратной связи.
2. В большинстве производственных отраслей используются огромные печи для плавления и нагревания различных элементов. Температуру таких печей требуется периодически контролировать. Кроме того, необходимо иметь возможность контролировать и изменять температуру, чтобы поддерживать температуру печи на желаемом постоянном уровне. Обычно для этой цели используется ПИД-регулятор.
3. ПИД-регулятор в основном используется в качестве контроллера заряда с отслеживанием точки максимальной мощности или контроллера заряда MPPT. ВАХ фотогальванического элемента обычно зависят от двух параметров, а именно освещенности и диапазона температур. По этой причине часто требуется изменять значения тока и рабочего напряжения в зависимости от погодных условий. Отслеживание точки наибольшей мощности фотогальванического элемента является сложной задачей. ПИД-регулятор обычно используется для выполнения задачи поддержания стабильного значения тока и напряжения путем оценки MPPT и обеспечения постоянного значения тока и напряжения при каждом изменении погоды.
ВАХ фотогальванического элемента обычно зависят от двух параметров, а именно освещенности и диапазона температур. По этой причине часто требуется изменять значения тока и рабочего напряжения в зависимости от погодных условий. Отслеживание точки наибольшей мощности фотогальванического элемента является сложной задачей. ПИД-регулятор обычно используется для выполнения задачи поддержания стабильного значения тока и напряжения путем оценки MPPT и обеспечения постоянного значения тока и напряжения при каждом изменении погоды.
4. ПИД-регулятор чаще всего используется в силовых преобразователях.
5. Различные исследовательские, опытно-конструкторские и испытательные организации, такие как химическая, фармацевтическая и обрабатывающая промышленность, используют ПИД-регуляторы для поддержания влажности и температуры в определенной области на постоянном уровне.
6. ПИД-регуляторы также используются в устройствах регулирования pH, расхода и скорости.
Применение ПИД-регулятора
Преимущества ПИД-регулятора
ПИД-регулятор имеет множество преимуществ, например:
1. Большинство современных устройств, оснащенных ПИД-регулятором, недороги.
Большинство современных устройств, оснащенных ПИД-регулятором, недороги.
2. Настройка и эксплуатация ПИД-регуляторов не требуют большого опыта. Следовательно, с такими устройствами может работать и неквалифицированный человек.
3. ПИД-регуляторы не зависят от процесса.
4. Они обеспечивают точный контроль заданного значения, что позволяет пользователю зафиксировать значение температуры или давления на определенном постоянном значении.
5. ПИД-регуляторы не требуют частого обслуживания.
6. Устройства и системы, оснащенные ПИД-регуляторами, имеют значительно улучшенное быстродействие.
Недостатки ПИД-регулятора
Некоторые ограничения или недостатки ПИД-регулятора включают:
1. ПИД-регуляторы могут работать нестабильно, если они неправильно настроены.
2. Эти типы контроллеров чувствительны к дифференциальному усилению шума.
3. Контроллер может поддерживать колебания вокруг рабочей точки и вызывать проблемы.
