
Шаговый двигатель
Дмитрий Левкин
Шаговый электродвигатель – это вращающийся электродвигатель с дискретными угловыми перемещениями ротора, осуществляемыми за счет импульсов сигнала управления [1].Предшественником шагового двигателя является серводвигатель.
Шаговые (импульсные) двигатели непосредственно преобразуют управляющий сигнал в виде последовательности импульсов в пропорциональный числу импульсов и фиксированный угол поворота вала или линейное перемещение механизма без датчика обратной связи. Это обстоятельство упрощает систему привода и заменяет замкнутую систему следящего привода (сервопривода) разомкнутой, обладающей такими преимуществами, как снижение стоимости устройства (меньше элементов) и увеличение точности в связи с фиксацией ротора шагового двигателя при отсутствии импульсов сигнала.
Очевиден и недостаток привода с шаговым двигателем: при сбое импульса дальнейшее слежение происходит с ошибкой в угле, пропорциональной числу пропущенных импульсов [2].
Поэтому в задачах, где требуются высокие характеристики (точность, быстродействие) используются серводвигатели. В остальных же случаях из-за более низкой стоимости, простого управления и неплохой точности обычно используются шаговые двигатели.
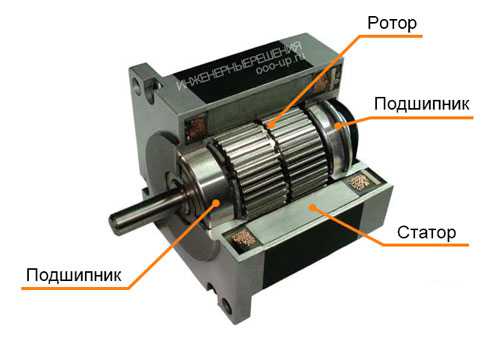
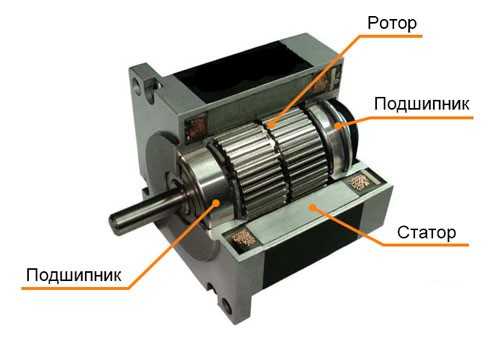
Шаговый двигатель, как и любой вращающийся электродвигатель, состоит из ротора и статора. Статор – неподвижная часть, ротор – вращающаяся часть.
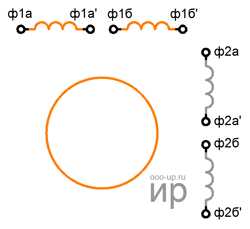
Гибридный шаговый электродвигатель
Шаговые двигатели надежны и недороги, так как ротор не имеет контактных колец и коллектора. Ротор имеет либо явно выраженные полюса, либо тонкие зубья. Реактивный шаговый двигатель – имеет ротор из магнитомягкого материала с явно выраженными полюсами. Шаговый двигатель с постоянными магнитами имеет ротор на постоянных магнитах. Гибридный шаговый двигатель имеет составной ротор включающий полюсные наконечники (зубья) из магнитомягкого материала и постоянные магниты. Определить имеет ротор постоянные магниты или нет можно посредством вращения обесточенного двигателя, если при вращении имеется фиксирующий момент и/или пульсации значит ротор выполнен на постоянных магнитах.
Статор шагового двигателя имеет сердечник с явно выраженными полюсами, который обычно делается из ламинированных штампованных листов электротехнической стали для уменьшения вихревых токов и уменьшения нагрева. Статор шагового двигателя обычно имеет от двух до пяти фаз.
Так как шаговый двигатель не предназначен для непрерывного вращения в его параметрах не указывают мощность. Шаговый двигатель – маломощный двигатель по сравнению с другими электродвигателями.
Одним из определяющих параметров шагового двигателя является шаг ротора, то есть угол поворота ротора, соответствующий одному импульсу. Шаговый двигатель делает один шаг в единицу времени в момент изменения импульсов управления. Величина шага зависит от конструкции двигателя: количества обмоток, полюсов и зубьев. В зависимости от конструкции двигателя величина шага может меняться в диапазоне от 90 до 0,75 градусов. С помощью системы управления можно еще добиться уменьшения шага пополам используя соответствующий метод управления.
Реактивный шаговый двигатель – синхронный реактивный двигатель. Статор реактивного шагового двигателя обычно имеет шесть явновыраженных полюсов и три фазы (по два полюса на фазу), ротор – четыре явно выраженных полюса, при такой конструкции двигателя шаг равен 30 градусам. В отличии от других шаговых двигателей выключенный реактивный шаговый двигатель не имеет фиксирующего (тормозящего) момента при вращении вала.
Трехфазный реактивный шаговый двигатель
(шаг 30°)
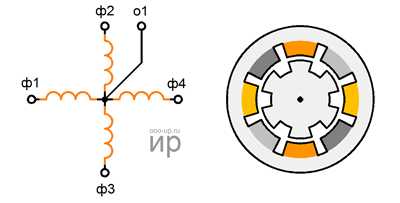
Четырехфазный реактивный шаговый двигатель
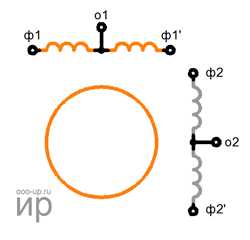
Ниже представлены осциллограммы управления для трехфазного шагового двигателя.
Униполярное волновое управление
Биполярное полношаговое управление
Биполярное 6-шаговое управление
Осциллограммы управления для четырехфазного шагового двигателя показаны на рисунке ниже. Последовательное включение фаз статора создает вращающееся магнитное поле за которым следует ротор. Однако из-за того, что ротор имеет меньшее количества полюсов, чем статор, ротор поворачивается за один шаг на угол меньше чем угол статора. Для реактивного двигателя угол шага равен:
,
- где NR – количество полюсов ротора;
- NS – количество полюсов статора.
Осциллограммы управления 4-х фазным реактивным шаговым двигателем
Чтобы изменить направление вращения ротора (реверс) реактивного шагового двигателя, необходимо поменять схему коммутации обмоток статора, так как изменение полярности импульса не изменяет направления сил, действующих на невозбужденный ротор [2].
Реактивные шаговые двигатели применяются только тогда, когда требуется не очень большой момент и достаточно большого шага угла поворота. Такие двигатели сейчас редко применяются.
- Отличительные черты:
- ротор из магнитомягкого материала с явно выраженными полюсами;
- наименее сложный и самый дешевый шаговый двигатель;
- отсутствует фиксирующий момент в обесточенном состоянии;
- большой угол шага.
Шаговый двигатель с постоянными магнитами имеет ротор на постоянных магнитах. Статор обычно имеет две фазы.
По сравнению с реактивными, шаговые двигатели с активным ротором создают большие вращающие моменты, обеспечивают фиксацию ротора при снятии управляющего сигнала. Недостаток двигателей с активным ротором — большой угловой шаг (7,5—90°). Это объясняется технологическими трудностями изготовления ротора с постоянными магнитами при большом числе полюсов. Если угол фиксации находится в диапазоне от 7,5 до 90 градусов скорее всего это шаговый двигатель с постоянными магнитами нежели гибридный шаговый двигатель.
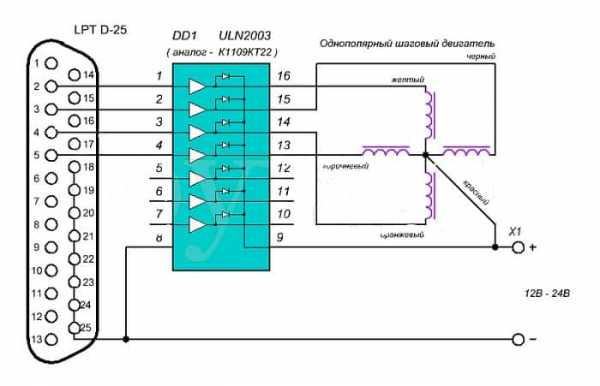
Обмотки могут иметь ответвление в центре для работы с однополярной схемой управления. Двухполярное управление требуется для питания обмоток без центрального ответвления.
Униполярный (однополярный) шаговый двигатель
Униполярный шаговый двигатель с постоянными магнитами имеет одну обмотку на фазу с ответвлением в центре. Каждая секция обмотки включается отдельно.
Таким образом расположение магнитных полюсов может быть изменено без изменения направления тока, а схема коммутации может быть выполнена очень просто (например на одном транзисторе) для каждой обмотки. Обычно центральное ответвление каждой фазы делается общим, в результате получается три вывода на фазу и всего шесть для обычного двухфазного двигателя.
Легкое управление однополярными двигателями сделало их популярными для любителей, они возможно являются наиболее дешевым способом чтобы получить точное угловое перемещение.
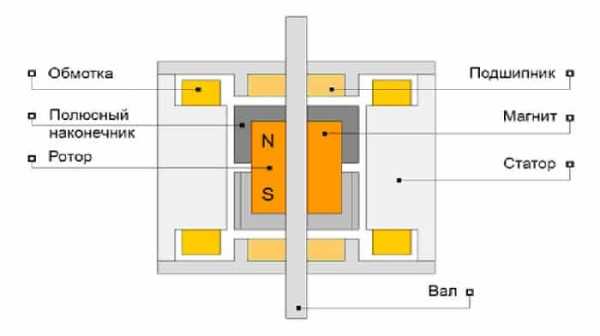
Схема униполярного двухфазного шагового двигателя
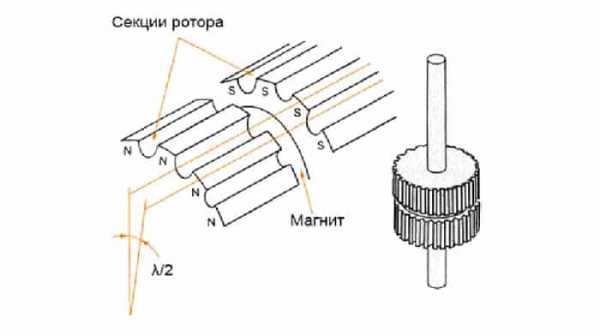
Схема биполярного двухфазного шагового двигателя
Биполярный шаговый двигатель
Двухполярные двигатели имеют одну обмотку на фазу. Для того чтобы изменить магнитную полярность полюсов необходимо изменить направление тока в обмотке, для этого схема управления должна быть более сложной, обычно с H-мостом. Биполярный шаговый двигатель имеет два вывода на фазу и не имеет общего вывода. Так как пространство у биполярного двигателя используется лучше, такие двигатели имеют лучший показатель мощность/объем чем униполярные. Униполярный двигатель имеет двойное количество проводников в том же объеме, но только половина из них используется при работе, тем не менее биполярный двигатель сложнее в управление.
Управление шаговым двигателем с постоянными магнитами
Для управления шаговым двигателем на постоянных магнитах к его обмоткам прикладывается сфазированный переменный ток. На практике это почти всегда прямоугольный сигнал сгенерированный от источника постоянного тока. Биполярная система управления генерирует прямоугольный сигнал изменяющийся от плюса к минусу, например от +2,5 В до -2,5 В. Униполярная система управления меняет направление магнитного потока катушки посредством двух сигналов, которые поочереди подаются на противоположные выводы катушки относительно ее центрального ответвления.
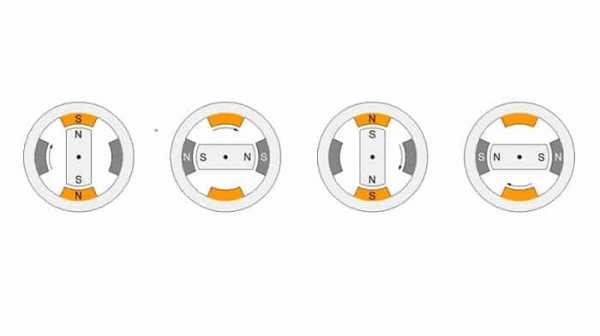
Волновое управление
Простейшим способом управления шаговым двигателем является волновое управление. При таком управлении в один момент времени возбуждается только одна обмотка. Но такой способ управления не обеспечивает максимально возможного момента.
Положение ротора шагового двигателя при волновом управлении
Шаговый двигатель с постоянными магнитами может иметь разную схему соединения обмоток статора.
Волновое управление биполярным шаговым двигателем
На рисунке выше представлены схема биполярного шагового двигателя и двухполюсные осциллограммы управления. При таком управлении обе полярности (“+” и “-“) подаются на двигатель. Магнитное поле катушки поворачивается за счет того, что полярность токов управления меняется.
Волновое управление униполярным шаговым двигателем
На рисунке выше представлены схема униполярного шагового двигателя и однополюсные осциллограммы управления.Так как для управления униполярным шаговым двигателем требуется только одна полярность это существенно упрощает схему системы управления. При этом требуется генерация четырех сигналов так как необходимо два однополярных сигнала для создания переменного магнитного поля катушки.
Необходимое для работы шагового двигателя переменное магнитное поле может быть создано как униполярным так и биполярным способом. Однако для униполярного управления катушки двигателя должны иметь центральное ответвление.
Шаговый двигатель с постоянными магнитами может иметь разную схему соединения обмоток статора. Схемы соединения шагового двигателя показаны на рисунке ниже.
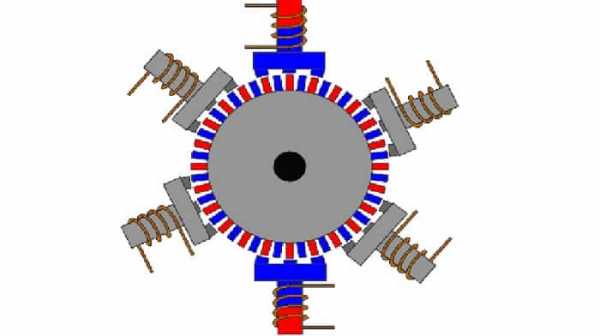
Схема 4 выводного биполярного шагового двигателя
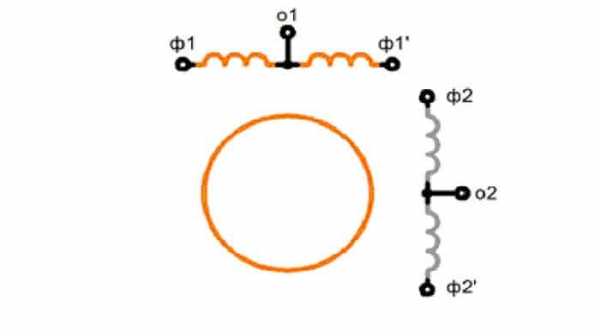
Схема 5 выводного униполярного шагового двигателя
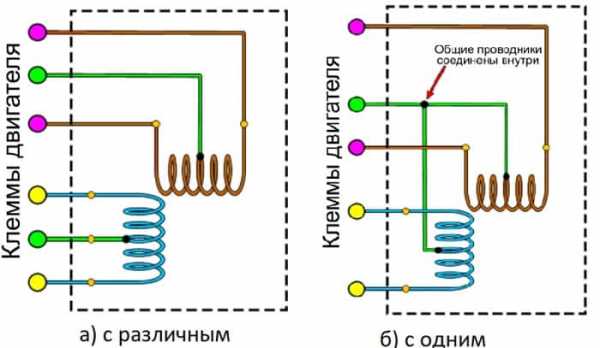
Схема 6 выводного униполярного шагового двигателя
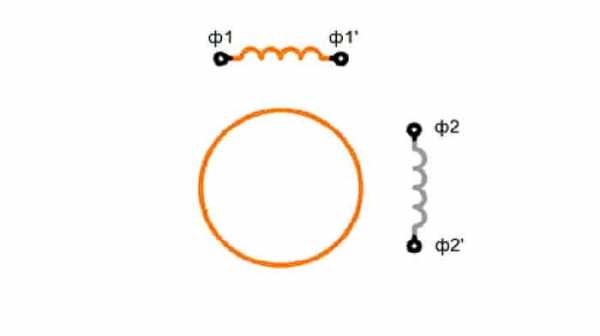
Схема 8 выводного шагового двигателя
Шаговый двигатель с 4 выводами может управляться только биполярным способом. 6-выводной двигатель предназначен для управления униполярным способом, несмотря на то, что он также может управляться биполярным способом если игнорировать центральные выводы. 5-выводной двигатель может управляться только униполярным способом, так как общий центральный вывод соединяет обе фазы. 8-выводная конфигурация двигателя встречается редко, но обеспечивает максимальную гибкость. Такой двигатель может быть подключен для управления также как 6- или 5- выводной двигатель. Пара обмоток может быть подключена последовательно для высоковольтного биполярного управления с малыми токами или параллельно для низковольтного управления с большими токами.
- 8-выводные двигатели могут быть соединены в нескольких конфигурациях:
- униполярной;
- биполярной с последовательным соединением. Больше индуктивность, но ниже ток обмотки;
- биполярной с параллельным соединением. Больше ток, но ниже индуктивность;
- биполярной с одной обмоткой на фазу. Метод использует только половину обмоток двигателя при работе, что уменьшает доступный момент на низких оборотах, но требует меньше тока.
Полношаговое управление
Полношаговое управление обеспечивает больший момент, чем волновое управление так как обе обмотки двигателя включены одновременно. Положение ротора при полношаговом управлении показано на рисунке ниже.
Положение ротора шагового двигателя при полношаговом управлении
Полношаговое биполярное управление шаговым двигателем
Полношаговое биполярное управление показанное на рисунке выше имеет такой же шаг как и при волновом управлении. Униполярное управление (не показано) потребует два однополярных управляющих сигнала для каждого биполярного сигнала. Однополярное управление требует менее сложной и дорогой схемы управления. Дополнительная стоимость биполярного управления оправдана когда требуется более высокий момент.
Полушаговое управление
Шаг для данной геометрии шагового двигателя делится пополам. Полушаговое управление обеспечивает большее разрешение при позиционировании вала двигателя.
Положение ротора шагового двигателя при полушаговом управлении
Полушаговое управление – комбинация волнового управления и полношагового управления с питанием по очереди: сначала одной обмотки, затем с питанием обоих обмоток. При таком управлении количество шагов увеличивается в двое по сравнению с другими методами управления.
Полушаговое биполярное управление шаговым двигателем
Гибридный шаговый двигатель был создан с целью объединить лучшие свойства обоих шаговых двигателей: реактивного и с постоянными магнитами, что позволило добиться меньшего угла шага. Ротор гибридного шагового двигателя представляет из себя цилиндрический постоянный магнит, намагниченный вдоль продольной оси с радиальными зубьями из магнитомягкого материала.
Конструкция гибридного шагового двигателя (осевой разрез)
Статор обычно имеет две или четыре фазы распределенные между парами явно выраженных полюсов. Обмотки статора могут иметь центральное ответвление для униполярного управления. Обмотка с центральным ответвлением выполняется с помощью бифилярной намотки.
Гибридный шаговый двигатель (радиальный разрез)
Заметьте что 48 зубьев на одной секции ротора смещены на половину зубцового деления λ относительно другой секции (рисунок ниже). Из-за этого смещения ротор фактически имеет 96 перемежающихся полюсов противоположной полярности.

Ротор гибридного шагового двигателя
Зубья на полюсах статора соответствуют зубьям ротора, исключая отсутствующие зубья в пространстве между полюсами. Таким образом один полюс ротора, скажем южный полюс, можно выровнять со статором в 48 отдельных положениях. Однако зуб южного полюса ротора смещен относительно северного зуба на половину зубцового деления. Поэтому ротор может быть выставлен со статором в 96 отдельных положениях.
Соседние фазы статора гибридного шагового двигателя смещены друг относительно друга на одну четверть зубцового деления λ. В результате ротор перемещается с шагом в четверть зубцового деления во время переменного возбуждения фаз. Другими словами для такого двигателя на один оборот приходится 2×96=192 шага.
- Шаговый гибридный двигатель имеет:
- шаг меньше, чем у реактивного двигателя и двигателя с постоянными магнитами;
- ротор – постоянный магнит с тонкими зубьями. Северные и южные зубья ротора смещены на половину зубцового деления для уменьшения шага;
- полюсы статора имеют такие же зубья как и ротор;
- статор имеет не менее чем две фазы;
- зубья соседних полюсов статора смещены на четверть зубцового деления для создания меньшего шага.
engineering-solutions.ru
устройство, принцип работы, типы, схемы подключения
Для работы практически всех электрических приборов, необходимы специальные приводные механизмы. Предлагаем рассмотреть, что такое шаговый двигатель, его конструкцию, принцип работы и схемы подключения.
Что такое шаговый двигатель?
Шаговый двигатель представляет собой электрическую машину, предназначенную для преобразования электрической энергии сети в механическую энергию. Конструктивно состоит из обмоток статора и магнитомягкого или магнитотвердого ротора. Отличительной особенностью шагового двигателя является дискретное вращение, при котором заданному числу импульсов соответствует определенное число совершаемых шагов. Наибольшее применение такие устройства получили в станках с ЧПУ, робототехнике, устройствах хранения и считывания информации.
В отличии от других типов машин шаговый двигатель совершает вращение не непрерывно, а шагами, от чего и происходит название устройства. Каждый такой шаг составляет лишь часть от его полного оборота. Количество необходимых шагов для полного вращения вала будет отличаться, в зависимости от схемы соединения, марки двигателя и способа управления.
Преимущества и недостатки шагового электродвигателя
К преимуществам эксплуатации шагового двигателя можно отнести:
- В шаговых электродвигателях угол поворота соответствует числу поданных электрических сигналов, при этом, после остановки вращения сохраняется полный момент и фиксация;
- Точное позиционирование – обеспечивает 3 – 5% от установленного шага, которая не накапливается от шага к шагу;
- Обеспечивает высокую скорость старта, реверса, остановки;
- Отличается высокой надежностью за счет отсутствия трущихся компонентов для токосъема, в отличии от коллекторных двигателей;
- Для позиционирования шаговому двигателю не требуется обратной связи;
- Может выдавать низкие обороты для непосредственно подведенной нагрузки без каких-либо редукторов;
- Сравнительно меньшая стоимость относительно тех же сервоприводов;
- Обеспечивается широкий диапазон управления скоростью оборотов вала за счет изменения частоты электрических импульсов.
К недостаткам применения шагового двигателя относятся:
- Может возникать резонансный эффект и проскальзывание шагового агрегата;
- Существует вероятность утраты контроля из-за отсутствия обратной связи;
- Количество расходуемой электроэнергии не зависит от наличия или отсутствия нагрузки;
- Сложности управления из-за особенности схемы
Устройство и принцип работы
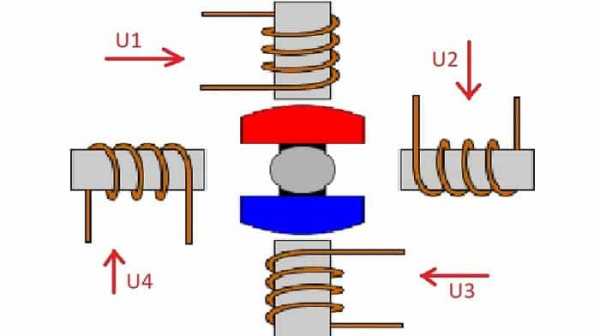
 Рис. 1. Принцип действия шагового двигателя
Рис. 1. Принцип действия шагового двигателяНа рисунке 1 изображены 4 обмотки, которые относятся к статору двигателя, а их расположение устроено так, что они находятся под углом 90º относительно друг друга. Из чего следует, что такая машина характеризуется размером шага в 90º.
В момент подачи напряжения U1 в первую обмотку происходит перемещение ротора на те же 90º. В случае поочередной подачи напряжения U2, U3, U4 в соответствующие обмотки, вал продолжит вращение до завершения полного круга. После чего цикл повторяется снова. Для изменения направления вращения достаточно изменить очередность подачи импульсов в соответствующие обмотки.
Типы шаговых двигателей
Для обеспечения различных параметров работы важна как величина шага, на который будет смещаться вал, так и момент, прилагаемый для перемещения. Вариации данных параметров достигаются за счет конструкции самого ротора, способа подключения и конструкции обмоток.
По конструкции ротора
Вращаемый элемент обеспечивает магнитное взаимодействие с электромагнитным полем статора. Поэтому его конструкция и технические особенности напрямую определяют режим работы и параметры вращения шагового агрегата. Чтобы на практике определить тип шагового мотора, при обесточенной сети необходимо провернуть вал, если ощущаете сопротивление, то это свидетельствует о наличии магнита, в противном случае, это конструкция без магнитного сопротивления.
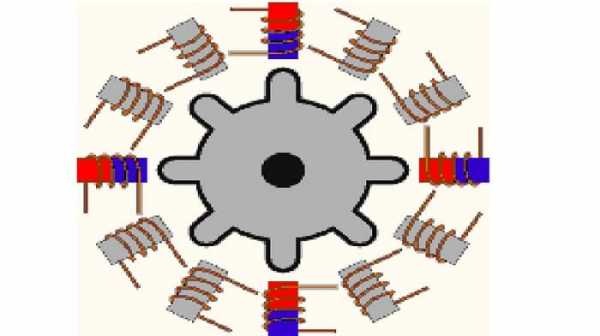
Реактивный
Реактивный шаговый двигатель не оснащается магнитом на роторе, а выполняется из магнитомягких сплавов, как правило, его набирают из пластин для уменьшения потерь на индукцию. Конструкция в поперечном разрезе напоминает шестерню с зубцами. Полюса статорных обмоток запитываются противоположными парами и создают магнитную силу для перемещения ротора, который двигается от попеременного протекания электрического тока в обмоточных парах.
 С переменным магнитным сопротивлением
С переменным магнитным сопротивлениемВесомым плюсом такой конструкции шагового привода является отсутствие стопорящего момента, образуемого полем по отношению к арматуре. По факту это тот же синхронный двигатель, в котором поворот ротора идет в соответствии с полем статора. Недостатком является снижение величины вращающего момента. Шаг для реактивного двигателя колеблется от 5 до 15°.
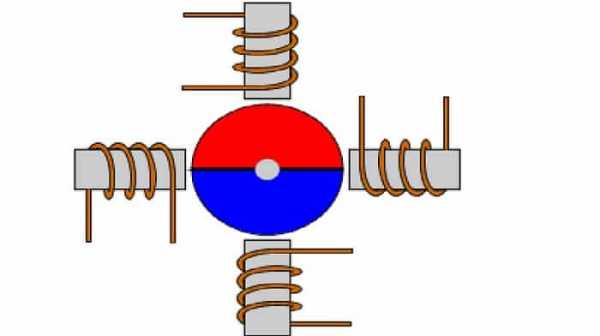
С постоянными магнитами
В этом случае подвижный элемент шагового двигателя собирается из постоянного магнита, в котором может быть два и большее количеством полюсов. Вращение ротора обеспечивается притяжением или отталкиванием магнитных полюсов электрическим полем при подаче напряжения в соответствующие обмотки. Для этой конструкции угловой шаг составляет 45-90°.
 С постоянным магнитом
С постоянным магнитомГибридные
Был разработан с целью объединения лучших качеств двух предыдущих моделей, за счет чего агрегат обладает меньшим углом и шагом. Его ротор выполнен в виде цилиндрического постоянного магнита, который намагничен по продольной оси. Конструктивно это выглядит как два круглых полюса, на поверхности которых расположены зубцы ротора из магнитомягкого материала. Такое решение позволило обеспечить отличный удерживающий и крутящий момент.
 Устройство гибридного шагового двигателя
Устройство гибридного шагового двигателя
Преимущества гибридного шагового двигателя заключатся в его высокой точности, плавности и скорости перемещения, малым шагом – от 0,9 до 5°. Их применяют для высококлассных станков ЧПУ, компьютерных и офисных приборах и современной робототехнике. Единственным недостатком считается относительно высокая стоимость.
Для примера разберем вариант гибридных ШД на 200 шагов позиционирования вала. Соответственно каждый из цилиндров будет иметь по 50 зубцов, один из них является положительным полюсом, второй отрицательным. При этом каждый положительный зубец расположен напротив паза в отрицательном цилиндре и наоборот. Конструктивно это выглядит так:
 Расположение пазов гибридника
Расположение пазов гибридникаИз-за чего на валу шагового двигателя получается 100 перемежающихся полюсов с отличной полярностью. Статор также имеет зубцы, как показано на рисунке 6 ниже, кроме промежутков между его компонентами.
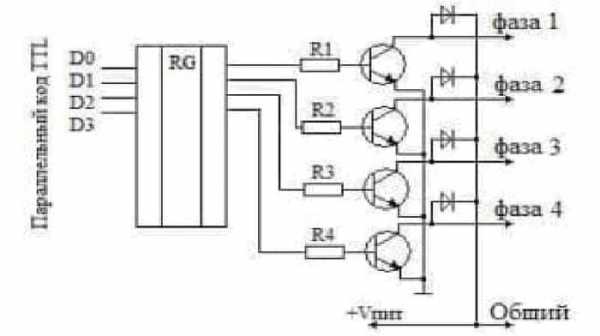 Рис. 6. Принцип работы гибридного ШД
Рис. 6. Принцип работы гибридного ШДЗа счет такой конструкции можно достичь смещения того же южного полюса относительно статора в 50 различных позиций. За счет отличия положения в полупозиции между северным и южным полюсом достигается возможность перемещения в 100 позициях, а смещение фаз на четверть деления предоставляет возможность увеличить количество шагов за счет последовательного возбуждения еще вдвое, то есть до 200 шагов углового вала за 1 оборот.
Обратите внимание на рисунок 6, принцип работы такого шагового двигателя заключается в том, что при попарной подаче тока в противоположные обмотки происходит подтягивание разноименных полюсов ротора, расположенных за зубьями статора и отталкивание одноименных, идущих перед ними по ходу вращения.
По виду обмоток
На практике шаговый двигатель представляет собой многофазный мотор. Плавность работы в котором напрямую зависит от количества обмоток – чем их больше, тем плавне происходит вращение, но и выше стоимость. При этом крутящий момент от числа фаз не увеличивается, хотя для нормальной работы их минимальное число на статоре электродвигателя должно составлять хотя бы две. Количество фаз не определяет числа обмоток, так двухфазный шаговый двигатель может иметь четыре и более обмотки.
Униполярный
Униполярный шаговый двигатель отличается тем, что в схеме подключения обмотки имеется ответвление от средней точки. Благодаря чему легко меняются магнитные полюса. Недостатком такой конструкции является использование только одной половины доступных витков, из-за чего достигается меньший вращающий момент. Поэтому они отличаются большими габаритами.
 Униполярный ШД
Униполярный ШДДля использования всей мощности катушки средний вывод оставляют не подключенным. Рассмотрите конструкции униполярных агрегатов, они могут содержать 5 и 6 выводов. Их количество будет зависеть от того, выводится срединный провод отдельно от каждой обмотки двигателя или они соединяются вместе.
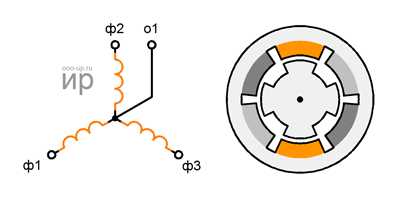 Схема а) с различными, б) с одним выводом
Схема а) с различными, б) с одним выводомБиполярный
Биполярный шаговый двигатель подключается к контроллеру через 4 вывода. При этом обмотки могут соединяться внутри как последовательно, так и параллельно. Рассмотрите пример его работы на рисунке.
 Биполярный шаговый двигатель
Биполярный шаговый двигательВ конструктивной схеме такого двигателя вы видите с одной обмоткой возбуждения в каждой фазе. Из-за этого смена направления тока требует использовать в электронной схеме специальные драйверы (электронные чипы, предназначенные для управления). Добиться подобного эффекта можно при помощи включения Н-моста. В сравнении с предыдущим, биполярное устройство обеспечивает тот же момент при гораздо меньших габаритах.
Подключение шагового двигателя
Чтобы запитать обмотки, потребуется устройство способное выдать управляющий импульс или серию импульсов в определенной последовательности. В качестве таких блоков выступают полупроводниковые приборы для подключения шагового двигателя, микропроцессорные драйвера. В которых имеется набор выходных клемм, каждая из них определяет способ питания и режим работы.
В зависимости от схемы подключения должны применяться те или другие выводы шагового агрегата. При различных вариантах подведения тех или иных клемм к выходному сигналу постоянного тока получается определенная скорость вращения, шаг или микрошаг линейного перемещения в плоскости. Так как для одних задач нужна низкая частота, а для других высокая, один и тот же двигатель может задавать параметр за счет драйвера.
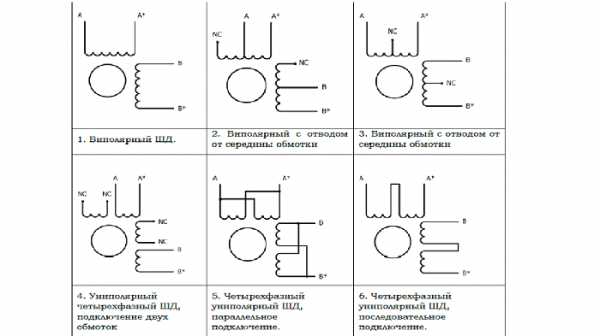
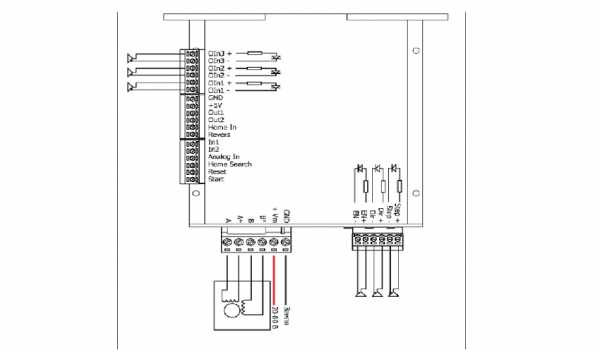
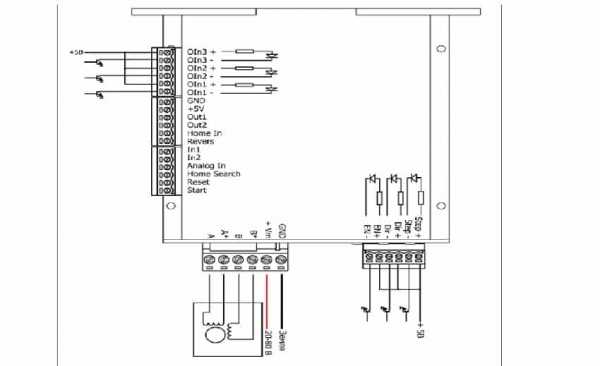
Типичные схемы подключения ШД
В зависимости того, какое количество выводов представлено на конкретном шаговом двигателе: 4, 6 или 8 выводов, будет отличаться и возможность использования той или иной схемы их подключения Посмотрите на рисунки, здесь показаны типичные варианты подключения шагового механизма:
 Схемы подключения различных типов шаговых двигателей
Схемы подключения различных типов шаговых двигателейПри условии запитки основных полюсов шаговой машины от одного и того же драйвера, по данным схемам можно отметить следующие отличительные особенности работы:
- Выводы однозначно подводятся к соответствующим клеммам устройства. При последовательном соединении обмоток увеличивает индуктивность обмоток, но понижает ток.
- Обеспечивает паспортное значение электрических характеристик. При параллельной схеме увеличивается ток и снижается индуктивность.
- При подключении по одной фазе на обмотку снижется момент на низких оборотах и уменьшает величину токов.
- При подключении осуществляет все электрические и динамические характеристики согласно паспорта, номинальный токи. Значительно упрощается схема управления.
- Выдает куда больший момент и применяется для больших частот вращения;
- Как и предыдущая предназначена для увеличения момента, но применяется для низких частот вращения.
Управление шаговым двигателем
Выполнение операций шаговым агрегатом может осуществляться несколькими методами. Каждый из которых отличается способом подачи сигналов на пары полюсов. Всего выделяют тир метода активации обмоток.
Волновой – в таком режиме происходит возбуждение только одной обмотке, к которой и притягиваются роторные полюса. При этом шаговый двигатель не способен вытягивать большую нагрузки, так как выдает лишь половину момента.
 Волновое управление
Волновое управлениеПолношаговый – в таком режиме происходит одновременная коммутация фаз, то есть, возбуждаются сразу обе. Из-за чего обеспечивается максимальный момент, в случае параллельного соединения или последовательного включения обмоток будет создаваться максимальное напряжение или ток.
 Полношаговое управление
Полношаговое управлениеПолушаговый – представляет собой комбинацию двух предыдущих методов коммутации обмоток. Во время реализации которого в шаговом двигателе происходит поочередная подача напряжения сначала в одну катушку, а затем сразу в две. Благодаря чему обеспечивается лучшая фиксация на максимальных скоростях и большее количество шагов.
 Полушаговое управление
Полушаговое управлениеДля более мягкого управления и преодоления инерции ротора используется микрошаговое управление, когда синусоида сигнала осуществляется микроступенчатыми импульсами. За счет чего силы взаимодействия магнитных цепей в шаговом двигателе получают более плавное изменение и, как следствие, перемещение ротора между полюсами. Позволяет в значительной степени снизить рывки шагового двигателя.
Без контроллера
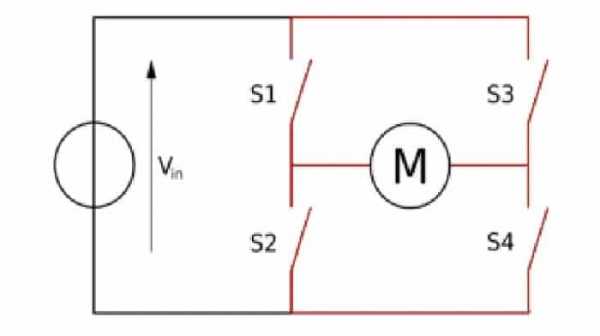
Для управления бесколлекторными двигателями применяется система Н-моста. Который позволяет переключать полярность для реверса шагового двигателя. Может выполняться на транзисторах или микросхемах, которые создают логическую цепочку для перемещения ключей.
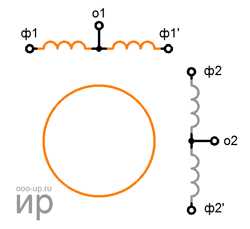 Схема Н-моста
Схема Н-мостаКак видите, от источника питания V напряжение подается на мост. При попарном включении контактов S1 – S4 или S3 – S2 будет происходить движение тока через обмотки двигателя. Что и обусловит вращение в ту или иную сторону.
С контроллером
Устройство контроллера позволяет осуществлять управление шаговым двигателем в различных режимах. В основе контроллера лежит электронный блок, формирующий группы сигналов и их последовательность, посылаемых на катушки статора. Для предотвращения возможности его повреждения в случае короткого замыкания или другой аварийной ситуации на самом двигателе каждый вывод защищается диодом, который не пропусти импульс в обратную сторону.
 Подключение через контроллер однополярного шагового двигателя
Подключение через контроллер однополярного шагового двигателяПопулярные схемы управления ШД
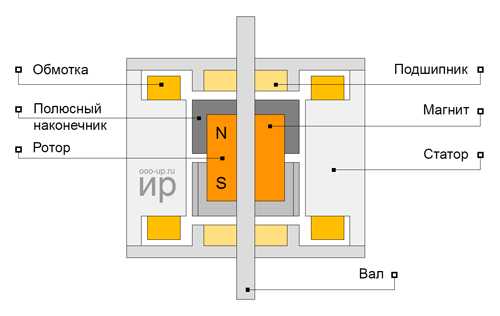 Схема управления от контроллера с дифференциальным выходом
Схема управления от контроллера с дифференциальным выходомЯвляется одним из наиболее помехозащищенных способов работы. При этом прямой и инверсный сигнал напрямую подключается к соответствующим полюсам. В такой схемы должно применяться экранирование сигнального проводника. Прекрасно подходит для нагрузки с низкой мощностью.
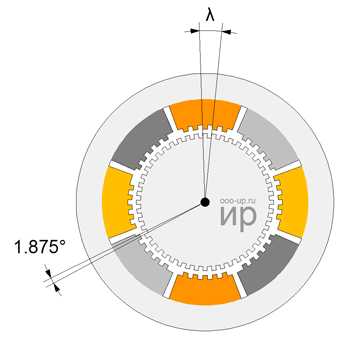 Схема управления от контроллера с выходом типа «открытый коллектор»
Схема управления от контроллера с выходом типа «открытый коллектор»В данной схеме происходит объединение положительных вводов контроллера, которые подключаются к положительному полюсу. В случае питания выше 9В требуется включение в схему специального резистора для ограничения тока. Позволяет задавать необходимое количество шагов со строго установленной скоростью, определить ускорение и т.д.
Простейший драйвер шагового двигателя своими руками
Чтобы собрать схему драйвера в домашних условиях могут пригодиться некоторые элементы от старых принтеров, компьютеров и другой техники. Вам понадобятся транзисторы, диоды, резисторы (R) и микросхема (RG).
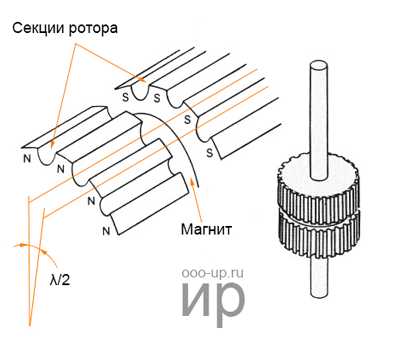 Схема простейшего драйвера
Схема простейшего драйвераДля построения программы руководствуйтесь следующим принципом: при подаче на один из выводов D логической единицы (остальные сигнализируют ноль) происходит открытие транзистора и сигнал проходит к катушке двигателя. Таким образом, выполняется один шаг.
На основе схемы составляется печатная плата, которую можно попытаться изготовить самостоятельно или сделать под заказ. После чего на плате впаиваются соответствующие детали. Устройство способно управлять шаговым устройством от домашнего компьютера за счет подключения к обычному USB порту.
Полезное видео
www.asutpp.ru
Шаговые двигатели. Принцип работы и управление
При большом числе зубцов ротора Zр его угол поворота значительно меньше угла поворота поля статора.
Величина углового шага редукторного реактивного шагового двигателя определяется выражением:
αш = 360 / Kt * Zр
В выражении для KT величину n2 следует брать равной 1, так как изменение направления поля не влияет на положение ротора.
Электромагнитный синхронизирующий момент реактивного двигателя обусловлен, как и в случае обычного синхронного двигателя, разной величиной магнитных сопротивлений по продольной и поперечной осям двигателя.
Основным недостатком шагового реактивного двигателя является отсутствие синхронизирующего момента при обесточенных обмотках статора.
Повышения степени редукции шаговых двигателей как активного, так и реактивного типа, можно достичь применением двух-, трех- и многопакетных конструкций. Зубцы статора каждого пакета сдвинуты относительно друг друга на часть зубцового деления. Если число пакетов — два, то этот сдвиг равен 1/2 зубцового деления, если три, то — 1/3, и т.д. В то же время, роторы-звездочки каждого из пакетов не имеют пространственного сдвига, то есть оси их полюсов полностью совпадают. Такая конструкция сложнее в изготовлении и дороже однопакетной. Кроме того, она требует сложного коммутатора.
Стремление совместить преимущества активного шагового двигателя (большой удельный синхронизирующий момент на единицу объема, наличие фиксирующего момента) и реактивного шагового двигателя (малая величина шага) привело к созданию гибридных индукторных шаговых двигателей.
В настоящее время имеется большое число различных конструкций индукторных двигателей, различающихся числом фаз, размещением обмоток, способом фиксации ротора при обесточенном статоре и т.д. Во всех конструкциях индукторных шаговых двигателей вращающий момент создается за счет взаимодействия магнитного поля, создаваемого обмотками статора и постоянного магнита в зубчатой структуре воздушного зазора. При этом синхронизирующий момент шагового индукторного двигателя по природе является реактивным и создается намагничивающей силой обмоток статора, а постоянный магнит, расположенный либо на статоре, либо на роторе, создает фиксирующий момент, удерживающий ротор двигателя в заданном положении при отсутствии тока в обмотках статора.
По сравнению с шаговым двигателем реактивного типа у индукторного шагового двигателя при одинаковой величине шага — больший синхронизирующий момент, лучшие энергетические и динамические характеристики.
purelogic.ru
6.3. Электропривод с шаговыми двигателями
Исполнительные органы ряда рабочих машин должны совершать строго дозированные перемещения с фиксацией своего положения в конце движения. В электроприводах таких машин и механизмов успешно применяются шаговые двигатели (ШД) различных типов, образующие основу дискретного электропривода.
Широкое распространение дискретного электропривода определяется еще и тем обстоятельством, что он естественным образом сочетается с цифровыми управляющими машинами и программными устройствами, которые все шире применяются во многих отраслях техники. Например, дискретный электропривод широко используется для металлообрабатывающих станков с числовым программным управлением (ЧПУ), а также для роботов и манипуляторов.
Шаговый двигатель по принципу своего действия является синхронным двигателем. Однако в отличие от последнего магнитное поле ШД перемещается (вращается) в воздушном зазоре не непрерывно, а дискретно, шагами. Это достигается за счет импульсного возбуждения обмоток ШД с помощью электронного коммутатора, который преобразует одноканальную последовательность управляющих импульсов в многофазную систему напряжений, прикладываемых к обмоткам (фазам) ШД.
Ступенчатому характеру изменения напряжения на фазах ШД соответствует дискретное вращение (перемещение) электромагнитного поля в его воздушном зазоре, вследствие чего движение ротора состоит из последовательных элементарных поворотов или шагов, совершаемых по апериодическому или колебательному закону.
а)ПринципдействияиосновныесвойстваШД
Принцип получения дискретного перемещения ротора рассмотрим на примере простейшей схемы двухфазного ШД, изображенной на рис. 6.3.
Шаговый двигатель имеет на статоре две пары явно выраженных полюсов, на которых находятся обмотки возбуждения (управления): обмотка Iс выводами1Н–1K. и вторая обмоткаIIс выводами2Н–2K. Каждая из обмоток состоит из двух частей, находящихся на противоположных полюсах ШД.
Питание обмоток ШД осуществляется, как правило, импульсами напряжения прямоугольной формы, поступающими с электронного коммутатора, входящего в состав схемы управления ШД Коммутатор и ШД образуют основную силовую часть шагового привода. Ротор ШД в рассматриваемой схеме представляет собой двухполюсный постоянный магнит, расположенный на валу двигателя внутри статора.

Рассмотрим работу ШД, предположив, что в начальный момент напряжение подано на обмотку I. Прохождение тока по этой обмотке вызовет появление магнитного поля статора с вертикально расположенными полюсамиN–S. В результате взаимодействия поля с постоянным магнитом ротора последний займет указанное на рис. 6.3,аравновесное положение, в котором оси магнитных полей статора и ротора совпадают. Положение будет устойчивым, поскольку при отклонении от него на ротор будет действовать вращающий момент (обычно называемый синхронизирующим), который стремится вернуть ротор в. положение равновесия. Этот момент определяется по формуле
(6.2)
где – угол между осями магнитных полей статора и ротора;Mmax– максимальный момент.
Допустим, что с помощью схемы управления напряжение снимается с обмотки Iи подается на обмоткуII. В этом случае образуется магнитное поле статора с горизонтальными полюсами (рис. 6.3,б), т. е. магнитное поле статора дискретно совершило поворот на четверть окружности статора. При этом между осями статора и ротора появится угол рассогласования=90° и на ротор будет действовать в соответствии с формулой (6.2) максимальный вращающий моментМ=Мтах. Под его действием ротор повернется на четверть окружности статора и займет новое устойчивое равновесное положение, показанное сплошной линией на рис. 6.3,б. Таким образом, вслед за шаговым перемещением поля статора совершит такое же шаговое перемещение и ротор двигателя.
Предположим, что отключилась обмотка IIи вновь подано питание на обмоткуI, но с противоположной по сравнению с рис. 6.3,аполярностью напряжения. Магнитное поле статора опять будет иметь вертикально расположенные полюсы, но другой по сравнению с рис. 6.3,аполярности. Это означает, что поле совершит еще один шаг на четверть окружности. Снова на ротор будет действовать синхронизирующий момент, который повернет его в положение, показанное на рис. 6.3,в. Следующий шаг в том же направлении ротор может совершить, если будет отключена обмоткаIи подключена обмоткаIIс обратной полярностью напряжения. И, наконец, ротор завершит полный оборот при снятии напряжения с обмоткиIIи подаче напряжения на обмоткуI.
Кроме рассмотренного способа коммутации обмоток двигателя, обеспечивающего шаговое перемещение ротора на 90°, существует другой способ, позволяющий при той же конструкции ШД уменьшить размер шага ротора вдвое.
Допустим, что исходное положение ШД соответствует схеме, показанной на рис. 6.3, а. Подключим обмотку IIс полярностью, соответствующей магнитному полю рис. 6.3,б, не отключая обмоткуI. При этом образуется вторая, горизонтальная система полюсов и магнитное поле будет складываться из магнитных полей горизонтальных и вертикальных полюсов. Ось такого результирующего поля будет располагаться между полюсами с одинаковой полярностью, как это показано на рис. 6.3,г, т. е. ось магнитного поля совершит поворот на 45°. Поэтому ротор при таком порядке возбуждения обмоток ШД повернется токе на 45, а не на 90°, как было ранее.
Для совершения следующего шага достаточно снять напряжение с обмотки I, в результате чего магнитное поле будет соответствовать схеме рис. 6.3,б. Следующее перемещение магнитного ноля и ротора на 45° совершится при возбуждении обмоткиIбез отключения обмоткиIIи т. д. Схема коммутации, при которой подключаются поочередно одна или две обмотки, называется несимметричной в отличие от рассмотренной вначале симметричной схемы.
Угловое перемещение ШД в общем случае определяется выражением
(6.3)
где р– число пар полюсов ротора ШД;п – число переключений (тактов) в цикле, равное числу фаз ШД при симметричной и удвоенному числу фаз при несимметричной коммутации.
Шаговое перемещение ротора осуществляется с помощью последовательности управляющих импульсов, при этом каждому импульсу соответствуют одно переключение обмоток ШД (один такт коммутации) и один шаг ротора. Суммарный угол поворота ШД пропорционален числу импульсов, а его скорость – частоте импульсов. Амплитуда и форма импульсов могут изменяться в определенных пределах, не нарушая нормальной работы шагового привода.
Шаговый двигатель может легко изменять направление своего движения (реверсироваться). Для реверса ШД, например, при симметричной схеме коммутации необходимо включить на обратную полярность напряжения обмотку, которая была отключена на данном такте коммутации. Тогда ротор ШД совершит шаг в противоположном направлении.
Основным режимом работы шагового привода является динамический. В отличие от СД ШД рассчитаны на вхождение в синхронизм из состояния покоя и принудительное электрическое торможение. Благодаря этому в шаговом электроприводе обеспечиваются пуск, торможение, реверс и переход с одной частоты управляющих импульсов на другую. Пуск ШД осуществляется скачкообразным или постепенным увеличением частоты входного сигнала от нуля до рабочей, торможение – снижением ее до нудя, а реверс – изменением последовательности коммутации обмоток ШД.
На рис. 6.4 показаны примеры переходных процессов в шаговом электроприводе при отработке им серии импульсов управления, где (– полный угол поворота вала ШД, а– единичный угол поворота (единичный шаг).

Переходные режимы для ШД сложны и ответственны, так как вследствие электромагнитной инерции обмоток ШД, механической инерции его ротора и момента нагрузки на валу при резких изменениях частоты следования импульсов управления ротор ШД может не успеть отработать полностью все импульсы, поступившие на вход шагового привода. Максимальная частота управляющих импульсов, при которой возможен пуск ШД из неподвижного состояния без выпадения из синхронизма (пропуска шагов), называется частотой приемистости. Чем выше электромагнитная и механическая инерция ШД и больше момент его нагрузки, тем меньше частота приемистости.
Современные ШД различны по конструктивному исполнению. В зависимости от числа фаз ШД и устройства магнитной системы ШД бывают однофазными, двухфазными и многофазными с активным или пассивным ротором.
Активный ротор у ШД выполняется из постоянных магнитов или снабжается обмоткой возбуждения, как у обычных СД. Вследствие высокой экономичности и надежности в работе, технологичности изготовления, небольших габаритов и массы широкое распространение получили ШД с ротором из постоянных магнитов, называемые магнитоэлектрическими шаговыми двигателями (см. рис. 6.3). Обычно ШД с активным ротором имеют крупный шаг ротора – от 90 до 15° в связи с трудностями изготовления активного ротора с малыми полюсными делениями. Для уменьшения шага в таких ШД увеличивают число фаз и тактов коммутации, а также используют двухстаторную или двухроторную конструкцию.
Максимальная скорость ШД с активным ротором составляет 208 – 314 рад/с, частота приемистости от 70 до 500 Гц, номинальные вращающие моменты от 10Ю-6до 1010-3Нм.
Промышленность выпускает несколько серий шаговых магнитоэлектрических двигателей четырехфазные ШДА, двух- и четырехфазные ШД и ДШ-А, четырехфазные ШДА-3 и др.
При необходимости получения небольших единичных перемещений ротора и в то же время больших частот приемистости используются ШД с пассивным ротором, которые делятся на реактивные и индукторные. Работа таких ШД основана на взаимодействии магнитного поля и ферромагнитного тела. Статор и ротор реактивного ШД имеют явно выраженные полюсы, называемые обычно зубцами. На зубцах статора размещаются обмотки возбуждения, питаемые от электронного коммутатора. Ротор ШД выполнен из ферромагнитного материала и не имеет обмоток возбуждения, вследствие чего и назван пассивным.
Отличительная особенность реактивного ШД заключается в неравенстве числа зубцов статора zcи ротораzр, причем обычноzc>zр. Вследствие такой конструкции при каждом переключении обмоток статора ротор совершает поворот (шаг), равный разности полюсных делений статораси роторар, а именно:
(6.4)
Уменьшив разность чисел зубцов zpиzс, можно снизить шаг ротора. Практически эту разность выбирают четной, что улучшает использование ШД. Для уменьшения шага полюсы статора выполняют с несколькими зубцами.
Реактивные ШД при простоте и технологичности конструкции, малых размерах шагов и скорости ротора имеют существенный недостаток – незначительные мощность и синхронизирующий момент, что ограничивает их применение. Этот недостаток отсутствует в индукторных ШД, в которых для увеличения синхронизирующего момента ротор подмагничивается со стороны статора с помощью постоянных магнитов или дополнительной обмотки возбуждения.
Электропромышленностью выпускается несколько серий ШД с пассивным ротором (Ш, ШДР, ШД, РШД), имеющих шаг от 1,5 до 9°, вращающие моменты от 2,510-6до 1010-3Нм и частоту приемистости от 250 до 1200 Гц.
Развитие дискретного электропривода привело к созданию специальных видов ШД – линейных, волновых, с малоинерционным и катящимся роторами.
На базе цилиндрических линейных ШД созданы двухкоординатные линейно-поворотные ШД, суммирующие на своем валу два независимых движения – вращательное и поступательное. Линейно-поворотные ШД типов ДШЛ-8 и ДШЛ-9 обеспечивают шаг поворота в 1° и шаг поступательного перемещения от 0,011 до 1,2510-3 м,полные перемещения до 5010-3м, моменты до 0,16 Нм и усилия до 36 Н.
Важным достижением в области дискретного электропривода является создание так называемых многокоординатных ШД, осуществляющих перемещение исполнительных органов по всем трем координатам пространства. Двигатели такого рода, отличаясь высокой точностью и скоростью позиционирования, используются в приводах манипуляторов, роботов и автоматических линиях станков. Современный дискретный электропривод способен (в пределах небольших мощностей) обеспечить разнообразные виды движения исполнительных органов рабочих машин и механизмов.
б)Схемыуправлениядискретнымэлектроприводом
Управление движением ШД осуществляется подачей на обмотки возбуждения статора определенной последовательности импульсов напряжения. Средняя скорость ШД определяется выражением
 (6.5)
(6.5)
где – шаг двигателя, рад;fк– частота коммутации обмоток, 1/с.
Управление ШД обеспечивается силовым электронным коммутатором, частота выходного напряжения которого (частота коммутации фаз ШД), задаваемая частотой входного управляющего сигнала, меняется в широких пределах. По существу своей работы такой коммутатор является ПЧ, а сам дискретный электропривод представляет собой систему с частотным управлением СД.
Современные схемы управления ШД состоят из нескольких функциональных блоков, выполняемых по различным схемам и с использованием разнообразных элементов и устройств, главным образом полупроводниковых. Стремление расширить области применения дискретного привода, повысить качество и точность его движения, надежность, удобство и простоту в наладке и эксплуатации отразилось в унификации схем управления ШД.
Функциональная схема дискретного привода показана на рис. 6.5. Основная ее часть, обычно называемая разомкнутой схемой дискретного электропривода, на рисунке выделена штриховой линией, содержит формирователь импульсов ФИ, распределитель импульсов РИ, промежуточный усилительПУ, коммутатор K(ПЧ) и блок питания элементов приводаБП. Рассмотрим кратко назначение элементов и принцип действия этой схемы применительно к четырехфазному ШД, который в настоящее время получил наибольшее распространение среди других типовШД.

Сигнал управления fув виде импульсов напряжения поступает на входФИот программного или другого внешнего командного устройства. БлокФИвидоизменяет входные импульсы, формируя их по длительности и амплитуде, как необходимо для нормальной работы последующего блока схемы управленияРИ. Распределитель импульсовРИпреобразует последовательность сформированныхФИимпульсов в четырехфазную систему однополярных импульсов напряжения, соответствующую числу фаз (обмоток) двигателя.
Импульсы с выхода РИусиливаются с помощью промежуточного усилителяПУи поступают на коммутатор, питающий обмотки ШД. В коммутатореKони обеспечивают управление силовыми элементами усилителя (транзисторами), работающими в режиме ключа (для ШД небольшой мощности), или тиристорами (для силовых ШД). ОбычноKпитается от источника постоянного тока (выпрямителей) и обеспечивает в обмотках ШД пульсирующий ток одного направления.
Рассмотрим схему (рис. 6.6) тиристорного коммутатора K, управляющего обмотками управления ШДОУ1–ОУ4. Основная часть схемы образована тиристорамиVS1–VS4, обеспечивающими парную коммутацию обмоток ШД, при которой в каждый момент времени включены две фазы (обмотки) из четырех. ТиристорыVS1иVS3,VS2 иVS4образуют схемы двух триггеров, в которых переключение тиристоров производится с помощью колебательных контуровLк–Ски диодовVD1иVD2. Принцип действия схемы поясним на примере работы триггера на тиристорахVS1–VS3.

Допустим, что в исходном положении тиристор VS1открыт и по обмоткеОУ1проходит ток, а тиристорVS3закрыт. КонденсаторСкпри этом заряжается с «+» на правой обкладке, как это показано на рисунке сплошными линиями. Если подать импульс управления наVS3, он откроется и по обмоткеОУ3начнет проходить ток. Одновременно по цепиVS3–VD3–VD1начнется быстрый перезаряд конденсатораСк, в процессе которого потенциал катодаVS1становится более положительным, чем потенциал его анода, ток через него будет уменьшаться и тиристорVS1закроется. К концу перезаряда конденсатора плюсовой станет его левая обкладка (пунктир на рисунке) и триггер готов к новому переключению, которое произойдет при снятии импульса управления сVS3и его подаче вновь наVS1. Таким образом, тиристоры в схеме триггера работают попеременно.
Аналогично работает триггер на тиристорах VS2иVS4. Для обеспечения вращения ШД одного направления тиристоры переключают в последовательностиVS1иVS2VS2иVS3VS3иVS4VS4и VSI–VS1иVS2, а для противоположного направления вращения – в последовательностиVS1иVS2VS1иVS4VS4иVS3VS3иVS2VS2иVS1и т. д.
Для снятия перенапряжений с обмоток ШД в период их коммутации параллельно этим обмоткам включены цепочки из последовательно включенных резистораRи диодаVD3.
Рассмотренная разомкнутая схема управления ШД не всегда обеспечивает высокие динамические свойства, точность и энергетические показатели дискретного привода. Поэтому современные схемы управления ШД содержат дополнительные блоки и устройства, с помощью которых характеристики электропривода улучшаются. К таким блокам (см. рис. 6.5) относятся частотно импульсный регулятор напряжения ЧИРН, усилитель обратной связи по токуУОС, блок электронного дробления шагаБЭДШ, блок плавного разгона и торможенияБПРТ(задатчик интенсивности), датчик положения и скоростиДПи цифровой регуляторЦР.
Блок ЧИРНсовместно с УОС служит для автоматической стабилизации тока в обмотках ШД и поддержания момента ШД, что существенно улучшает энергетические показатели его работы. Стабилизация тока осуществляется введением отрицательной обратной связи по току, сигнал которой снимается с резистораRо,с(см рис. 6.6), включенного в общую шину питания обмоток ШД. Разность сигналовUо,си задающегоUз, образует сигнал управления, который поступает на входУОС. С помощью этого сигнала за счет изменения частоты переключенияЧИРН(частотно-импульсная модуляция) изменяется среднее значение напряжения питания и тем самым регулируется ток в обмотках ШД.
Для улучшения качества движения ШД при низких частотах и повышения точности отработки входных импульсов управления с помощью БЭДШуменьшается единичный шаг ШД.
Расширение динамических свойств дискретного электропривода, в частности увеличение диапазона рабочих частот входного сигнала, значительно превышающих частоту приемистости ШД, может быть достигнуто введением в схему блока БПРТ, обеспечивающего разгон и торможение ШД с заданным темпом, при котором еще не происходит пропуска управляющих импульсов. При использованииБПРТобласть рабочих частот шагового электропривода может быть расширена в 2–3 раза.
Возможности дискретного электропривода расширяются при создании замкнутых структур схем управления, выполняемых с помощью показанных блоков ДПиЦР(см. рис. 6.5). В таком дискретном приводе информация о действительном положении вала и скорости ШД поступает на вход цифрового регулятораЦР, который обеспечивает заданные движения привода.
Область применения дискретного привода очень широкая. Его используют в механизмах подачи станков, газорезательных и сварочных автоматах, приборах времени, нажимных устройствах прокатных станов, лентопротяжных и регистрирующих устройствах, а также для роботов и манипуляторов, в медицинской технике, для производства элементов микроэлектроники и т. д.
studfiles.net
Шаговый привод
Шаговый привод
Шаговый привод – это мехатронное устройство, которое преобразует электрические импульсы в дискретные механические перемещения.
Шаговый привод, как правило, состоит из двух основных составляющих частей. Это, так называемый, драйвер, принимающий импульсы от устройства управления верхнего уровня и формирующий напряжение питания шагового двигателя. И, во-вторых, это шаговый двигатель, вал которого, в зависимости от поданного на него напряжения питания, поворачивается на строго определенный, небольшой угол в ту или другую сторону.
Устройства управления верхнего уровня (контроллеры шагового привода) формируют импульсные сигналы для точного управления драйверами шаговых двигателей и шаговыми двигателями в зависимости от управляющей программы, записанной, например, в память этого управляющего устройства.
На рисунках ниже представлен внешний вид шагового двигателя с выступающим валом и внешний вид драйвера шагового привода на примере драйвера производства фирмы Autonics.
 |
 |
Контроллер шагового привода может иметь вид, представленный на рисунке ниже.

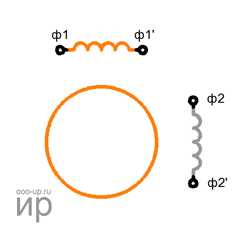
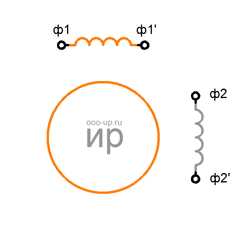
Принцип работы шагового двигателя можно объяснить следующим образом. Допустим имеются два электромагнитных контура (см. рисунок ниже), между которыми расположен постоянный магнит. Магнит может вращаться вокруг оси, перпендикулярной направлениям магнитных линий этих контуров. Представим себе, что выключатель В замыкается. В этом случае, в синем контуре образуется магнитное поле, направление которого можно определить по «правилу буравчика». Взаимодействие поля постоянного магнита и поля, от протекания электрического тока, приведет к повороту магнита на угол 90° по часовой стрелке. После такого шагового движения ротор этого двигателя остановится в вертикальном положении. Чтобы ротору совершить следующий шаг необходимо выключатель В разомкнуть, а выключатель А’ – замкнуть. При этом ротор опять займет горизонтальное положение, но теперь южный полюс постоянного магнита будет слева. Ротор опять замрет в таком состоянии до момента прихода следующего токового импульса. Последовательная активация обмоток B’, A, B, A’ и т.д. двигателя вызывает дискретные угловые перемещения (шаги) ротора.

Наличие постоянного магнита на роторе шагового двигателя не обязательно. Ниже представлена схема конструкции шагового двигателя, где ротор выполнен из магнитомягкого материала. Здесь, подавая импульсы тока на обмотки полюсов статора, можно заставить ротор совершать шаговые движения от одного полюса статора к другому.

Как правило, промышленные шаговые двигатели имеют гибридную конструкцию и сочетают в себе лучшие черты двигателей с переменным магнитным сопротивлением и двигателей с постоянными магнитами. Конструктивно шаговые электродвигатели состоят из статора, на котором расположены обмотки возбуждения, и ротора. Статор гибридного двигателя имеет зубцы, обеспечивая большое количество эквивалентных полюсов, в отличие от основных полюсов, на которых расположены обмотки.

Обычно используются 8 основных полюсов для двигателей с полным шагом 1.8 угловых градуса. Зубцы ротора обеспечивают меньшее сопротивление магнитной цепи в определенных положениях ротора. Это происходит из-за соответствующего расположения зубцов, когда часть зубцов ротора находится строго напротив зубцов статора, а часть между ними.
Ротор гибридного двигателя имеет зубцы, расположенные в осевом направлении. Ротор разделен на две части, между которыми расположен цилиндрический постоянный магнит. Таким образом, зубцы одной половинки ротора являются северными полюсами, а зубцы второй половинки – южными. Кроме того, половинки ротора повернуты друг относительно друга на половину угла шага зубцов. Число пар полюсов ротора равно количеству зубцов на одной из его половинок. Зубчатые полюсные наконечники ротора, как и статор, набраны из отдельных пластин для уменьшения потерь на вихревые токи.
В машиностроении распространение получили высокомоментные двухфазные гибридные шаговые электродвигатели с угловым перемещением 1,8°/шаг (200 шагов/оборот) или при использовании половинного шага – 0,9°/шаг (400 шагов/оборот).
Дискретность шага создаёт существенные вибрации, которые в ряде случаев могут приводить к снижению крутящего момента и возбуждению механических резонансов в системе. Уровень вибраций удаётся снижать при использовании режима дробления шага или при увеличении количества фаз с двух до пяти. Поэтому пятифазные шаговые двигатели получили распространение в высокоточных системах приводов подач станочного оборудования.
Режим дробления шага (микрошаг) реализуется при совместном управлении током в разных обмотках шагового электродвигателя. Управляя соотношением токов в обмотках можно зафиксировать ротор в промежуточном положении между шагами. Таким образом, можно повысить плавность вращения ротора и точность позиционирования.
При осуществлении каждого шага ротор не сразу останавливается в новом положении равновесия, а осуществляет затухающие колебания вокруг этого положения. Время переходного процесса в большой степени зависит от характеристик нагрузки. Во многих приложениях такие колебания являются нежелательными. Микрошаговый режим позволяет в значительной степени эти колебания. На рисунке ниже показаны перемещения ротора при работе в полношаговом и микрошаговом режимах.

Шаговые электродвигатели применяются в приводах машин и механизмов, работающих в старт-стопном режиме, или в приводах непрерывного движения, где управляющее воздействие задаётся последовательностью электрических импульсов, например, в станках с ЧПУ. Шаговые приводы позволяют получать точное позиционирование без использования обратной связи от датчиков углового положения.
Главное преимущество шаговых приводов – простота при высокой точности. При подаче потенциалов на обмотки шаговый двигатель повернется строго на определенный угол. К преимуществам можно отнести стоимость шаговых приводов, которые значительно дешевле сервоприводов с обратной связью.
Основной недостаток – в возможности «потери шагов» ротора. Это наиболее известная проблема этих двигателей. Потеря шагов может произойти при большой нагрузке на валу, большом ускорении старта или торможения, при резонансных явления в системе, где установлен шаговый привод.
Как один из способов, избежать «потери шагов», можно предложить увеличить мощность шагового двигателя.
Основные характеристики шагового двигателя – это удерживающий момент (синхронизирующий момент, “max. holding torque”) и предельная частота следования импульсов. Единицы измерения удерживающего момента шагового двигателя: кГс×см или Н×м. Он определяет тот максимальный момент нагрузки при нулевой скорости, прилагаемый к валу двигателя, после превышения которого шаговый двигатель «опрокидывается», то есть неконтролируемо теряет свое угловое положение. Величина удерживающего момента, приводимая в спецификации, соответствует номинальному току через обмотки двигателя. Рабочий момент в системе должен быть в несколько раз меньше этой предельной характеристики.
Предельная частота следования импульсов, при которой возможен пуск и остановка двигателя без потери шага, называется приемистостью шагового привода. Следует помнить, что с увеличением частоты вращения шагового двигателя значительно падает момент, который может развить этот двигатель. Зависимость развиваемого момента и частоты следования импульсов, как правило, приводятся производителями шаговых двигателей. Пользователю всегда следует обращать внимание на данные частотные характеристики.
servosystem.ru
Управление шаговым двигателем | Электроника для всех
Рано или поздно, при постройке робота, возникнет нужда в точных перемещениях, например, когда захочется сделать манипулятор. Вариантов тут два — сервопривод, с обратными связями по току, напряжению и координате, либо шаговый привод. Сервопривод экономичней, мощней, но при этом имеет весьма нетривиальную систему управления и под силу далеко не всем, а вот шаговый двигатель это уже ближе к реальности.Шаговый двигатель это, как понятно из его названия, двигатель который вращается дискретными перемещениями. Достигается это за счет хитрой формы ротора и двух (реже четырех) обмоток. В результате чего, путем чередования направления напряжения в обмотках можно добиться того, что ротор будет по очереди занимать фиксированные значения.
В среднем, у шагового двигателя на один оборот вала, приходится около ста шагов. Но это сильно зависит от модели двигателя, а также от его конструкции. Кроме того, существуют полушаговый и микрошаговый режим, когда на обмотки двигателя подают ШИМованное напряжение, заставляющее ротор встать между шагами в равновесном состоянии, которое поддерживается разным уровнем напряжения на обмотках. Эти ухищрения резко улучшают точность, скорость и бесшумность работы, но снижается момент и сильно увеличивается сложность управляющей программы — надо ведь расчитывать напряжения для каждого шага.
Один из недостатков шаговиков, по крайней мере для меня, это довольно большой ток. Так как на обмотки напруга подается все время, а такого явления как противоЭДС в нем, в отличии от коллекторных двигателей, не наблюдается, то, по сути дела, мы нагружаемся на активное сопротивление обмоток, а оно невелико. Так что будь готов к тому, что придется городить мощный драйвер на MOSFET транзисторах или затариваться спец микросхемами.
Типы шаговых двигателей
Если не углубляться во внутреннюю конструкцию, число шагов и прочие тонкости, то с пользовательской точки зрения существует три типа:
- Биполярный — имеет четыре выхода, содержит в себе две обмотки.
- Униполярный — имеет шесть выходов. Содержит в себе две обмотки, но каждая обмотка имеет отвод из середины.
- Четырехобмоточный — имеет четыре независимые обмотки. По сути дела представляет собой тот же униполярник, только обмотки его разделены. Вживую не встречал, только в книжках.
Где взять шаговый двигатель.
Вообще шаговики встречаются много где. Самое хлебное место — пятидюймовые дисководы и старые матричные принтеры. Еще ими можно поживиться в древних винчестерах на 40Мб, если, конечно, рука поднимется покалечить такой антиквариат.
А вот в трехдюймовых флопарях нас ждет облом — дело в том, что там шаговик весьма ущербной конструкции — у него только один задний подшипник, а передним концом вал упирается в подшипник закрепленный на раме дисковода. Так что юзать его можно только в родном креплении. Либо городить высокоточную крепежную конструкцию. Впрочем, тебе может повезет и ты найдешь нетипичный флопарь с полноценным движком.
Схема управления шаговым двигателем
Я разжился контроллерами шаговиков L297 и мощным сдвоенным мостом L298N.
Лирическое отступление, при желании можно его пропустить
Именно на нем был сделан мой первый силовой блок робота. Кроме него там еще два источника питания на 5 и на 3.3 вольта, а также контроллер двух движков на L293 (такой же как и во второй реализации силового блока). В качестве контроллера тогда был выбран АТ89С2051. Это антикварный контроллер архитектуры MSC-51 в котором из периферии только два таймера, порты да UART, но я его люблю нежно и трепетно, так как первая любовь не проходит никогда =). К сожалению исходники его мега прошивки канули в Лету вместе с убившимся винтом, так что я не могу поделиться теми извращенскими алгоритмами, которые были туда засунуты. А там был и двухканальный ШИМ, и I2C Slave протокол, и контроль за положением шаговика с точным учетом его перемещения. Короче, знатный был проект. Ныне валяется трупом, т.к. все лень запустить Keil uVision и написать новую прошивку. Да и ассемблер С51 я стал уже забывать.
Схема включения L298N+L297 до смешного проста — надо тупо соединить их вместе. Они настолько созданы друг для друга, что в даташите на L298N идет прямой отсыл к L297, а в доке на L297 на L298N.
 |
Осталось только подключить микроконтроллер.
- На вход CW/CCW подаем направление вращения — 0 в одну сторону, 1 — в другую.
- на вход CLOCK — импульсы. Один импульс — один шаг.
- вход HALF/FULL задает режим работы — полный шаг/полушаг
- RESET сбрасывает драйвер в дефолтное состояние ABCD=0101.
- CONTROL определяет каким образом задается ШИМ, если он в нуле, то ШИМ образуется посредством выходов разрешения INh2 и INh3, а если 1 то через выходы на драйвер ABCD. Это может пригодится, если вместо L298 у которой есть куда подключать входы разрешения INh2/INh3 будет либо самодельный мост на транзисторах, либо какая-либо другая микросхема.
- На вход Vref надо подать напряжение с потенциометра, которое будет определять максимальную перегрузочную способность. Подашь 5 вольт — будер работать на пределе, а в случае перегрузки сгорит L298, подашь меньше — при предельном токе просто заглохнет. Я вначале тупо загнал туда питание, но потом передумал и поставил подстроечный резистор — защита все же полезная вещь, плохо будет если драйвер L298 сгорит.
Если же на защиту пофигу, то можешь заодно и резисторы, висящие на выходе sense выкинуть нафиг. Это токовые шунты, с них L297 узнает какой ток течет через драйвер L298 и решает сдохнет он и пора отрубать или еще протянет. Там нужны резисторы помощней, учитывая что ток через драйвер может достигать 4А, то при рекомендуемом сопротивлении в 0.5 Ом, будет падение напряжения порядка 2 вольт, а значит выделяемая моща будет около 4*2=8 Вт — для резистора огого! Я поставил двухваттные, но у меня и шаговик был мелкий, не способный схавать 4 ампера.
Документация по микросхемам:
easyelectronics.ru
Как работают шаговые двигатели | РОБОТОША

Использование шаговых двигателей является одним из самых простых, дешевых и легких решений для реализации систем точного позиционирования. Эти двигатели очень часто используются в различных станках ЧПУ и роботах. Сегодня я расскажу о том, как устроены шаговые двигатели и как они работают.
Что такое шаговый двигатель?
Прежде всего, шаговый двигатель — это двигатель. Это означает, что он преобразует электрическую энергию в механическую. Основное отличие между ним и всеми остальными типами двигателей состоит в способе, благодаря которому происходит вращение. В отличие от других моторов, шаговые двигатели вращаются НЕ непрерывно! Вместо этого, они вращаются шагами (отсюда и их название). Каждый шаг представляет собой часть полного оборота. Эта часть зависит, в основном, от механического устройства мотора и от выбранного способа управления им. Шаговые двигатели также различаются способами питания. В отличие от двигателей переменного или постоянного тока, обычно они управляются импульсами. Каждый импульс преобразуется в градус, на который происходит вращение. Например, 1.8º шаговый двигатель, поворачивает свой вал на 1.8° при каждом поступающем импульсе. Часто, из-за этой характеристики, шаговые двигатели еще называют цифровыми.
Основы работы шагового двигателя
Как и все моторы, шаговые двигатели состоят из статора и ротора. На роторе установлены постоянные магниты, а в состав статора входят катушки (обмотки). Шаговый двигатель, в общем случае, выглядит следующим образом:

Здесь мы видим 4 обмотки, расположенные под углом 90° по-отношению друг к другу, размещенные на статоре. Различия в способах подключения обмоток в конечном счете определяют тип подключения шагового двигателя. На рисунке выше, обмотки не соединяются вместе. Мотор по такой схеме имеет шаг поворота равный 90°. Обмотки задействуются по кругу — одна за другой. Направление вращения вала определяется порядком, в котором задействуются обмотки. Ниже показана работа такого мотора. Ток через обмотки протекает с интервалом в 1 секунду. Вал двигателя поворачивается на 90° каждый раз, когда через катушку протекает ток.
Режимы управления
Теперь рассмотрим различные способы подачи тока на обмотки и увидим, как в результате вращается вал мотора.
Волновое управление или полношаговое управление одной обмоткой
Этот способ описан выше и называется волновым управлением одной обмоткой. Это означает, что только через одну обмотку протекает электрический ток. Этот способ используется редко. В основном, к нему прибегают в целях снижения энергопотребления. Такой метод позволяет получить менее половины вращающего момента мотора, следовательно, нагрузка мотора не может быть значительной.
У такого мотора будет 4 шага на оборот, что является номинальным числом шагов.
Полношаговый режим управления
Вторым, и наиболее часто используемым методом, является полношаговый метод. Для реализации этого способа, напряжение на обмотки подается попарно. В зависимости от способа подключения обмоток (последовательно или параллельно), мотору потребуется двойное напряжение или двойной ток для работы по отношению к необходимым при возбуждении одной обмотки. В этом случае мотор будет выдавать 100% номинального вращающего момента.
Такой мотор имеет 4 шага на полный оборот, что и является номинальным числом шагов для него.
Полушаговый режим
Это очень интересный способ получить удвоенную точность системы позиционирования, не меняя при этом ничего в «железе»! Для реализации этого метода, все пары обмоток могут запитываться одновременно, в результате чего, ротор повернется на половину своего нормального шага. Этот метод может быть также реализован с использованием одной или двух обмоток. Ниже показано, как это работает.
Однообмоточный режим
Двухобмоточный режим
Используя этот метод, тот же самый мотор сможет дать удвоенное число шагов на оборот, что означает двойную точность для системы позиционирования. Например, этот мотор даст 8 шагов на оборот!
Режим микрошага
Микрошаговый режим наиболее часто применяемый способ управления шаговыми двигателями на сегодняшний день. Идея микрошага состоит в подаче на обмотки мотора питания не импульсами, а сигнала, по своей форме, напоминающего синусоиду. Такой способ изменения положения при переходе от одного шага к другому позволяет получить более гладкое перемещение, делая шаговые моторы широко используемыми в таких приложениях как системы позиционирования в станках с ЧПУ. Кроме этого, рывки различных деталей, подключенных к мотору, также как и толчки самого мотора значительно снижаются. В режиме микрошага, шаговый мотор может вращаться также плавно как и обычные двигатели постоянного тока.
Форма тока, протекающего через обмотку похожа на синусоиду. Также могут использоваться формы цифровых сигналов. Вот некоторые примеры:
Метод микрошага является в действительности способом питания мотора, а не методом управления обмотками. Следовательно, микрошаг можно использовать и при волновом управлении и в полношаговом режиме управления. Ниже продемонстрирована работа этого метода:
Хотя кажется, что в режиме микрошага шаги становятся больше, но, на самом деле, этого не происходит. Для повышения точности часто используются трапецевидные шестерни. Этот метод используется для обеспечения плавного движения.
Типы шаговых двигателей
Шаговый двигатель с постоянным магнитом
Ротор такого мотора несет постоянный магнит в форме диска с двумя или большим количеством полюсов. Работает точно также как описано выше. Обмотки статора будут притягивать или отталкивать постоянный магнит на роторе и создавать тем самым крутящий момент. Ниже представлена схема шагового двигателя с постоянным магнитом.

Обычно, величина шага таких двигателей лежит в диапазоне 45-90°.
Шаговый двигатель с переменным магнитным сопротивлением
У двигателей этого типа на роторе нет постоянного магнита. Вместо этого, ротор изготавливается из магнитомягкого металла в виде зубчатого диска, типа шестеренки. Статор имеет более четырех обмоток. Обмотки запитываются в противоположных парах и притягивают ротор. Отсутствие постоянного магнита отрицательно влияет на величину крутящего момента, он значительно снижается. Но есть и большой плюс. У этих двигателей нет стопорящего момента. Стопорящий момент — это вращающий момент, создаваемый постоянными магнитами ротора, которые притягиваются к арматуре статора при отсутствии тока в обмотках. Можно легко понять, что это за момент, если попытаться повернуть рукой отключенный шаговый двигатель с постоянным магнитом. Вы почувствуете различимые щелчки на каждом шаге двигателя. В действительности то, что вы ощутите и будет фиксирующим моментом, который притягивает магниты к арматуре статора. Ниже показана работа шагового двигателя с переменным магнитным сопротивлением.
Шаговые двигатели с переменным магнитным сопротивлением обычно имеют шаг, лежащий в диапазоне 5-15°.
Гибридный шаговый двигатель
Данный тип шаговых моторов получил название «гибридный» из-за того, что сочетает в себе характеристики шаговых двигателей и с постоянными магнитами и с переменным магнитным сопротивлением. Они обладают отличными удерживающим и динамическим крутящим моментами, а также очень маленькую величину шага, лежащую в пределах 0.9-5°, обеспечивая великолепную точность. Их механические части могут вращаться с большими скоростями, чем другие типы шаговых моторов. Этот тип двигателей используется в станках ЧПУ high-end класса и в роботах. Главный их недостаток — высокая стоимость.
Обычный мотор с 200 шагами на оборот будет иметь 50 положительных и 50 отрицательных полюсов с 8-ю обмотками (4-мя парами). Из-за того, что такой магнит нельзя произвести, было найдено элегантное решение. Берется два отдельных 50-зубых диска. Также используется цилиндрический постоянный магнит. Диски привариваются один с положительному, другой к отрицательному полюсам постоянного магнита. Таким образом, один диск имеет положительный полюс на своих зубьях, другой — отрицательный.

Два 50-зубых диска помещены сверху и снизу постоянного магнита
Фокус в том, что диски размещаются таким образом, что если посмотреть на них сверху, то они выглядят как один 100-зубый диск! Возвышения на одном диске совмещаются со впадинами на другом.

Впадины на одном диске выровнены с возвышениями на другом
Ниже показана работа гибридного шагового двигателя, имеющего 75 шагов на оборот (1.5° на шаг). Стоит заметить, что 6 обмоток спарены, каждая имеет обмотку с противоположной стороны. Вы наверняка ожидали, что катушки расположены под углом в 60° следом друг за другом, но, на самом деле, это не так. Если предположить, что первая пара — это самая верхняя и самая нижняя катушки, тогда вторая пара смещена под углом 60+5° по отношению к первой, и третья смещена на 60+5° по отношению ко второй. Угловая разница и является причиной вращения мотора. Режимы управления с полным и половинным шагом могут использоваться, впрочем как и волновое управление для снижения энергопотребления. Ниже продемонстрировано полношаговое управление. В полушаговом режиме, число шагов увеличится до 150!

Не пытайтесь следовать за обмотками, чтобы понаблюдать, как это работает. Просто сфокусируйтесь на одной обмотке и ждите. Вы заметите, что всякий раз, когда обмотка задействована, есть 3 положительных полюса (красный) в 5° позади, которые притягиваются по направлению вращения и другие 3 отрицательных полюса (синий) в 5° впереди, которые толкаются в направлении вращения. Задействованная обмотка всегда находится между положительным и отрицательным полюсами.
Подключение обмоток
Шаговые двигатели относятся к многофазным моторам. Больше обмоток, значит, больше фаз. Больше фаз, более гладкая работа мотора и более выокая стоимость. Крутящий момент не связан с числом фаз. Наибольшее распространение получили двухфазные двигатели. Это минимальное количество необходимых для того, чтобы шаговый мотор функционировал. Здесь необходимо понять, что число фаз не обязательно определяет число обмоток. Например, если каждая фаза имеет 2 пары обмоток и мотор является двухфазным, то количество обмоток будет равно 8. Это определяет только механические характеристики мотора. Для упрощения, я рассмотрю простейший двухфазный двигатель с одной парой обмоток на фазу.
Существует три различных типа подключения для двухфазных шаговых двигателей. Обмотки соединяются между собой, и, в зависимости от подключения, используется различное число проводов для подключения мотора к контроллеру.
Биполярный двигатель
Это наиболее простая конфигурация. Используются 4 провода для подключения мотора к контроллеру. Обмотки соединяются внутри последовательно или параллельно. Пример биполярного двигателя:

Мотор имеет 4 клеммы. Два желтых терминала (цвета не соответствуют стандартным!) питают вертикальную обмотку, два розовых — горизонтальную обмотку. Проблема такой конфигурации состоит в том, что если кто-то захочет изменить магнитную полярность, то единственным способом будет изменение направления электрического тока. Это означает, что схема драйвера усложнится, например это будет H-мост.
Униполярный двигатель
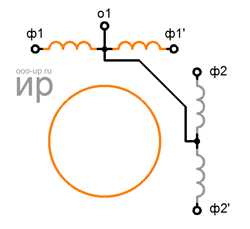
В униполярном двигателе общий провод подключен к точке, где две обмотки соединены вместе:

Используя этот общий провод, можно легко изменить магнитные полюса. Предположим, например, что мы подключили общий провод к земле. Запитав сначала один вывод обмотки, а затем другой — мы изменяем магнитные полюса. Это означает, что схема для использования биполярного двигателя очень простая, как правило, состоит только из двух транзисторов на фазу. Основным недостатком является то, что каждый раз, используется только половина доступных катушечных обмоток. Это как при волновом управлении двигателем с возбуждением одной обмотки. Таким образом, крутящий момент всегда составляет около половины крутящего момента, который мог быть получен, если бы обе катушки были задействованы. Другими словами, униполярные электродвигатели должны быть в два раза более габаритными, по сравнению с биполярным двигателем, чтобы обеспечить такой же крутящий момент. Однополярный двигатель может использоваться как биполярный двигатель. Для этого нужно оставить общий провод неподключенным.
Униполярные двигатели могут иметь 5 или 6 выводов для подключения. На рисунке выше продемонстрирован униполярный мотор с 6 выводами. Существуют двигатели, в которых два общих провода соединены внутри. В этом случае, мотор имеет 5 клемм для подключения.

8-выводной шаговый двигатель
Это наиболее гибкий шаговый мотор в плане подключения. Все обмотки имеют выводы с двух сторон:
Этот двигатель может быть подключен любым из возможных способов. Он может быть подключен как:
- 5 или 6-выводной униполярный,
- биполярный с последовательно соединенными обмотками,
- биполярный с параллельно соединенными обмотками,
- биполярный с одним подключением на фазу для приложений с малым потреблением тока

Еще по этой теме
Вы можете пропустить чтение записи и оставить комментарий. Размещение ссылок запрещено.
robotosha.ru
