
Шаговые двигатели. Создаем робота-андроида своими руками [litres]
Читайте также
Советские ядерные двигатели
Советские ядерные двигатели В Советском Союзе работы над ядерными ракетными двигателями начались в середине 50-х годов. В НИИ-1 (научный руководитель — Мстислав Келдыш) инициатором и руководителем работ по ЯРД был Виталий Иевлев. В 1957 году он сделал по этой теме сообщение
Электротермические двигатели
Электротермические двигатели Нам уже известно, что одним из способов увеличения эффективности двигателей для космических кораблей является повышение температуры (а значит и скорости) истекающих газов. Но эту температуру можно поднимать не только с помощью химической
2.
 Вечные двигатели XVI и XVII столетий
Вечные двигатели XVI и XVII столетий
2. Вечные двигатели XVI и XVII столетий Ранние искатели вечного движения редко доверяли бумаге свои мысли и изобретения, и хотя большинство первых печатных книг касалось наук и ремесел, лишь в некоторых из них можно найти упоминание о перпетуум мобиле.Вечный двигатель описан
Двигатели постоянного тока
Двигатели постоянного тока Двигатели постоянного тока для любительского конструирования могут использоваться для движения и перемещения конструкций роботов (см. рис. 4.13). Для большинства таких двигателей характерны высокая частота вращения ротора и небольшой крутящий
Шаговые двигатели
Шаговые двигатели
B качестве ходовых двигателей платформы лучше всего использовать шаговые двигатели.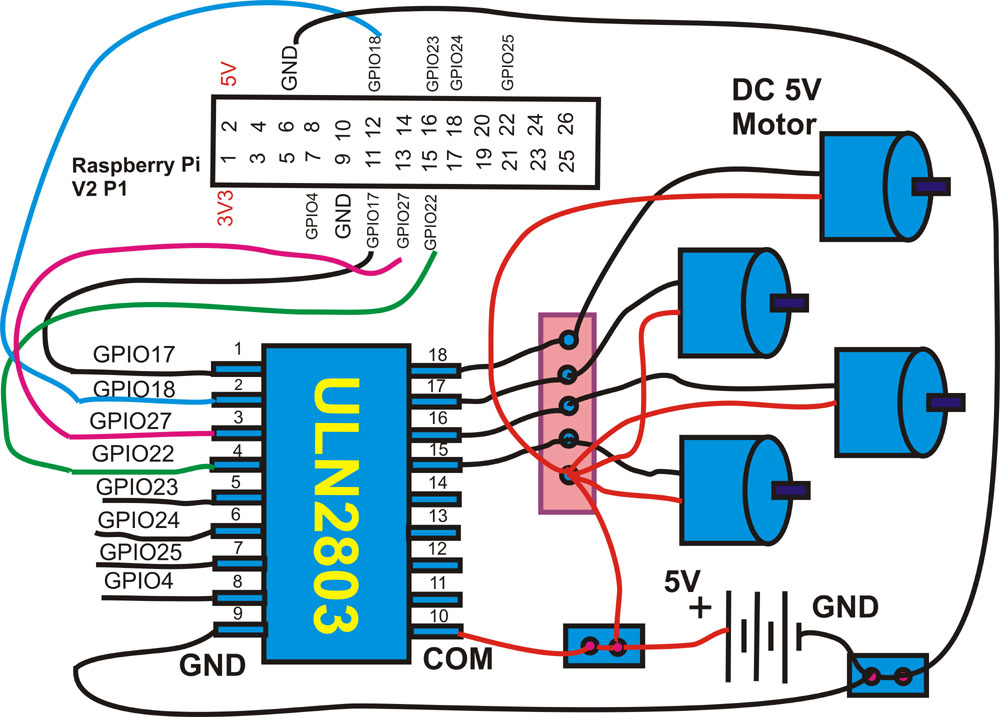
Шаговые двигатели
Шаговые двигатели На рис 10.11. изображена эквивалентная электрическая схема используемого нами двигателя. Двигатель имеет шесть проводников, выходящих из его корпуса. Рис. 10.11. Схема выводов однополярного шагового двигателяПредположим, что мы только что взяли двигатель
Двигатели заставляют мир вращаться
Двигатели заставляют мир вращаться Вентиляторами и насосами дело не кончается. Они приводятся в движение электродвигателями. Институт Рокки Маунтин в 1989 г. показал, как объединить 35 усовершенствований на участке между электрическим счетчиком и входным валом
Двигатели «МОТОР СИЧ» для российских вертолетов
Двигатели «МОТОР СИЧ» для российских вертолетов Вячеслав БОГУСЛАЕВ, председатель совета директоров ОАО «Мотор Сич»Ни для кого не секрет, что подавляющее большинство российских вертолетов сегодня оснащается двигателями производства запорожского ОАО «Мотор Сич». ОАО
ОАО
§ 46. Двигатели внутреннего сгорания
§ 46. Двигатели внутреннего сгорания Двигатели внутреннего сгорания (ДВС) являются поршневыми тепловыми двигателями, в которых топливо сгорает непосредственно внутри рабочего цилиндра. Образующаяся при сгорании смесь газов, расширяясь, перемещает поршень, совершающий
Часть первая. Двигатели фантастических скоростей
Часть первая. Двигатели фантастических скоростей Глава I. На дальних подступах В этой главе рассказывается о последних успехах поршневых авиационных двигателей и закате их славы, о том, почему они не смогли преодолеть «звуковой барьер» и навсегда потеряли свое былоеГлава V.
Глава V. Двигатели-гибриды Эта глава знакомит читателя с некоторыми новыми двигателями, представляющими разнообразные сочетания уже известных двигателей и обладающими замечательными свойствами, что позволяет думать об их почетном месте в авиации будущего.Времена,
2.10.1. ЭЛЕКТРИЧЕСКИЕ ДВИГАТЕЛИ
2.10.1. ЭЛЕКТРИЧЕСКИЕ ДВИГАТЕЛИ Важнейшими научными предпосылками электромеханики послужили достижения в области электродинамики и открытие электромагнитной индукции. Свою положительную роль при разработке первых конструкций электрических машин и электромагнитных
6.2.12. АСИНХРОННЫЕ ДВИГАТЕЛИ
6.2.12. АСИНХРОННЫЕ ДВИГАТЕЛИ
Массовое применение асинхронных двигателей потребовало их серийного выпуска как в предвоенные, так и в послевоенные годы. В 70-х годах наиболее широкое распространение получили короткозамкнутые асинхронные двигатели общего назначения серии
В 70-х годах наиболее широкое распространение получили короткозамкнутые асинхронные двигатели общего назначения серии
Включай двигатели, железный человек, будем пробиваться через заторы Полноприводный Audi R8 5.2 FSI S Tronic
Включай двигатели, железный человек, будем пробиваться через заторы Полноприводный Audi R8 5.2 FSI S Tronic Интересно, а критик Э. Гилл пишет ресторанные обзоры, если у него простуда? Потому что, конечно, если у вас в глазах слезы, голова заполнена жидкой ртутью, а из носа капает,
О шаговых двигателях и том, как их есть
Что такое шаговый двигатель для ЧПУ станка и для чего нужен?
Шаговый двигатель — это машина, преобразующая электрическую энергию (она поступает из электросети) в механическую. Происходит это благодаря выполнению дискретных перемещений ротора. После каждого действия динамической части ее положение фиксируется.
Происходит это благодаря выполнению дискретных перемещений ротора. После каждого действия динамической части ее положение фиксируется.
Все передвижения в отдельности имеют одинаковую величину и образуют полный оборот (цикл).
Какие шаговые двигатели нужны для ЧПУ-станка
Разновидность двигателя не менее важна, чем его технические характеристики. Каждый вид имеет свои особенности.
- Биполярные. Их чаще всего используют на станках с ЧПУ. Основное преимущество разновидности — возможность установить новый драйвер, если предыдущий вышел из строя. При этом даже на малых оборотах сохранится высокое удельное сопротивление.
- Трехфазные. Характеризуются высокой скоростью. Их выбирают в том случае, если важна именно скорость.
- Униполярные. Включают в себя несколько разновидностей биполярных. Двигатели отличаются друг от друга, а их подбор осуществляется в зависимости от вида обмотки.
Типы двигателей
Перед покупкой необходимо определиться с подходящей модификацией. Одними из самых распространенных являются следующие типы устройств:
Одними из самых распространенных являются следующие типы устройств:
- Биполярные. Считаются наиболее популярными моделями для ЧПУ. Отличаются высоким удельным сопротивлением на небольших оборотах. К тому же при поломке старого драйвера можно без проблем подобрать новый;
- Униполярные. Разновидность биполярных шаговых двигателей. В зависимости от исполнения подключение обмоток может быть разным;
- Трехфазные. Основное преимущества – большая скорость по сравнению с биполярными аналогами. Использование трехфазных двигателей оптимально в случаях, когда нужна высокая скорость вращения.
При выборе двигателя не лишним будет изучить характеристики готовых станков, близких по характеристикам к разрабатываемому оборудованию.
Как подобрать шаговый двигатель для создания ЧПУ-станка своими руками?
Подбор оптимального двигателя проводится на основании нескольких параметров.
Индуктивность
Первым делом вычисляют квадратный корень из индуктивности обмотки. Полученное число умножается на 32. Итоговое значение сравнивается с напряжением источника, который питает драйвер. Эти показатели не могут значительно отличаться друг от друга.
Полученное число умножается на 32. Итоговое значение сравнивается с напряжением источника, который питает драйвер. Эти показатели не могут значительно отличаться друг от друга.
Мотор будет работать слишком громко и перегреваться в случае разницы более 30 %.
Высокая индуктивность помогает сохранить высокий крутящий момент. Для двигателя с высокой индуктивностью важно подобрать драйвер с большим напряжением. Только так мотор сможет полноценно работать.
Крутящий момент и скорость
Чтобы выбрать идеально подходящий мотор, нужно составить график скорости и крутящего момента (точнее, зависимости одного параметра от другого). Готовый график показывает, соответствует ли выбранный мотор заданным техническим параметрам.
Геометрические параметры
Рекомендуется проанализировать следующие показатели:
- Момент инерции роторов.
- Номинальный ток внутри фазы.
- Максимальное число статического синхронизирующего момента.
- Общая характеристика сопротивления фаз омического типа.

ВАЖНО! При выборе двигателя особое внимание уделяется фланцу, диаметру вала и длине самого двигателя.
Шаговые двигатели
Шаговые двигатели относятся к классу бесколлекторных двигателей постоянного тока. Как и любые бесколлекторные двигатели, они имеют высокую надежность и большой срок службы, что позволяет использовать их в критичных, например, индустриальных применениях.
По сравнению с обычными двигателями постоянного тока, шаговые двигатели требуют значительно более сложных схем управления, которые должны выполнять все коммутации обмоток при работе двигателя. Выбор контроллера для управления шаговым двигателем описан в статье Контроллеры ШД. Кроме того, сам шаговый двигатель – дорогостоящее устройство, поэтому там, где точное позиционирование не требуется, обычные коллекторные двигатели имеют заметное преимущество. Справедливости ради следует отметить, что в последнее время для управления коллекторными двигателями все чаще применяют контроллеры, которые по сложности практически не уступают контроллерам шаговых двигателей.
Одним из главных преимуществ шаговых двигателей является возможность осуществлять точное позиционирование и регулировку скорости без датчика обратной связи. Это очень важно, так как такие датчики могут стоить намного больше самого двигателя. Однако это подходит только для систем, которые работают при малом ускорении и с относительно постоянной нагрузкой. В то же время системы с обратной связью способны работать с большими ускорениями и даже при переменном характере нагрузки. Если нагрузка шагового двигателя превысит его момент, то информация о положении ротора теряется и система требует базирования с помощью, например, концевого выключателя или другого датчика. Системы с обратной связью не имеют подобного недостатка.
При проектировании конкретных систем приходится делать выбор между сервомотором и шаговым двигателем. Когда требуется прецизионное позиционирование и точное управление скоростью, а требуемый момент и скорость не выходят за допустимые пределы, то шаговый двигатель является наиболее экономичным решением. Как и для обычных двигателей, для повышения момента может быть использован понижающий редуктор. Однако для шаговых двигателей редуктор не всегда подходит.
Как и для обычных двигателей, для повышения момента может быть использован понижающий редуктор. Однако для шаговых двигателей редуктор не всегда подходит.
В отличие от коллекторных двигателей, у которых момент растет с увеличением скорости, шаговый двигатель имеет больший момент на низких скоростях. К тому же, шаговые двигатели имеют гораздо меньшую максимальную скорость по сравнению с коллекторными двигателями, что ограничивает максимальное передаточное число и, соответственно, увеличение момента с помощью редуктора. Готовые шаговые двигатели с редукторами хотя и существуют, однако являются экзотикой. Еще одним фактом, ограничивающим применение редуктора, является присущий ему люфт. Возможность получения низкой частоты вращения часто является причиной того, что разработчики, будучи не в состоянии спроектировать редуктор, применяют шаговые двигатели неоправданно часто. В то же время коллекторный двигатель имеет более высокую удельную мощность, низкую стоимость, простую схему управления, и вместе с одноступенчатым червячным редуктором он способен обеспечить тот же диапазон скоростей, что и шаговый двигатель. К тому же, при этом обеспечивается значительно больший момент. Приводы на основе коллекторных двигателей очень часто применяются в технике военного назначения, а это косвенно говорит о хороших параметрах и высокой надежности таких приводов. Да и в современной бытовой технике, автомобилях, промышленном оборудовании коллекторные двигатели распространены достаточно сильно. Тем не менее, для шаговых двигателей имеется своя, хотя и довольно узкая, сфера применения, где они незаменимы.
К тому же, при этом обеспечивается значительно больший момент. Приводы на основе коллекторных двигателей очень часто применяются в технике военного назначения, а это косвенно говорит о хороших параметрах и высокой надежности таких приводов. Да и в современной бытовой технике, автомобилях, промышленном оборудовании коллекторные двигатели распространены достаточно сильно. Тем не менее, для шаговых двигателей имеется своя, хотя и довольно узкая, сфера применения, где они незаменимы.
Виды шаговых двигателей:
· двигатели с переменным магнитным сопротивлением
· двигатели с постоянными магнитами
· гибридные двигатели
Определить тип двигателя можно даже на ощупь: при вращении вала обесточенного двигателя с постоянными магнитами (или гибридного) чувствуется переменное сопротивление вращению, двигатель вращается как бы щелчками. В то же время вал обесточенного двигателя с переменным магнитным сопротивлением вращается свободно.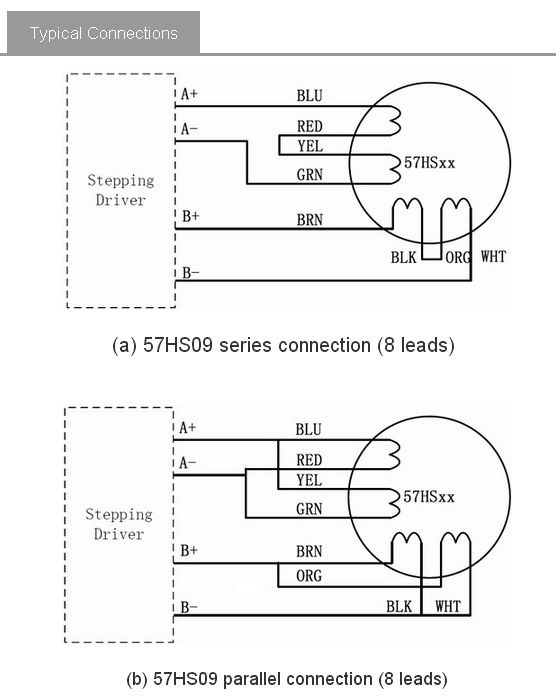 Гибридные двигатели являются дальнейшим усовершенствованием двигателей с постоянными магнитами и по способу управления ничем от них не отличаются.
Гибридные двигатели являются дальнейшим усовершенствованием двигателей с постоянными магнитами и по способу управления ничем от них не отличаются.
Определить тип двигателя можно также по конфигурации обмоток. Двигатели с переменным магнитным сопротивлением обычно имеют три (реже четыре) обмотки с одним общим выводом. Двигатели с постоянными магнитами чаще всего имеют две независимые обмотки. Эти обмотки могут иметь отводы от середины. Иногда двигатели с постоянными магнитами имеют 4 раздельных обмотки. В шаговом двигателе вращающий момент создается магнитными потоками статора и ротора, которые соответствующим образом ориентированы друг относительно друга.
Статор изготовлен из материала с высокой магнитной проницаемостью и имеет несколько полюсов. Полюс можно определить как некоторую область намагниченного тела, где магнитное поле сконцентрировано. Полюса имеют как статор, так и ротор. Для уменьшения потерь на вихревые токи магнитопроводы собраны из отдельных пластин, подобно сердечнику трансформатора. Вращающий момент пропорционален величине магнитного поля, которая пропорциональна току в обмотке и количеству витков. Таким образом, момент зависит от параметров обмоток. Если хотя бы одна обмотка шагового двигателя запитана, ротор принимает определенное положение. Он будет находится в этом положении до тех пор, пока внешний приложенный момент не превысит некоторого значения, называемого моментом удержания. После этого ротор повернется и будет стараться принять одно из следующих положений равновесия.
Вращающий момент пропорционален величине магнитного поля, которая пропорциональна току в обмотке и количеству витков. Таким образом, момент зависит от параметров обмоток. Если хотя бы одна обмотка шагового двигателя запитана, ротор принимает определенное положение. Он будет находится в этом положении до тех пор, пока внешний приложенный момент не превысит некоторого значения, называемого моментом удержания. После этого ротор повернется и будет стараться принять одно из следующих положений равновесия.
Биполярные и униполярные шаговые двигатели В зависимости от конфигурации обмоток двигатели делятся на биполярные и униполярные. Биполярный двигатель имеет одну обмотку в каждой фазе, которая для изменения направления магнитного поля должна переполюсовывается драйвером. Для такого типа двигателя требуется мостовой драйвер, или полумостовой с двухполярным питанием. Всего биполярный двигатель имеет две обмотки и, соответственно, четыре вывода.Униполярный двигатель также имеет одну обмотку в каждой фазе, но от середины обмотки сделан отвод. Это позволяет изменять направление магнитного поля, создаваемого обмоткой, простым переключением половинок обмотки. При этом существенно упрощается схема драйвера. Драйвер должен иметь только 4 простых ключа. Таким образом, в униполярном двигателе используется другой способ изменения направления магнитного поля.
Это позволяет изменять направление магнитного поля, создаваемого обмоткой, простым переключением половинок обмотки. При этом существенно упрощается схема драйвера. Драйвер должен иметь только 4 простых ключа. Таким образом, в униполярном двигателе используется другой способ изменения направления магнитного поля.
Средние выводы обмоток могут быть объединены внутри двигателя, поэтому такой двигатель может иметь 5 или 6 выводов Иногда униполярные двигатели имеют раздельные 4 обмотки, по этой причине их ошибочно называют 4-х фазными двигателями. Каждая обмотка имеет отдельные выводы, поэтому всего выводов 8. При соответствующем соединении обмоток такой двигатель можно использовать как униполярный или как биполярный. Униполярный двигатель с двумя обмоткими и отводами тоже можно использовать в биполярном режиме, если отводы оставить неподключенными. В любом случае ток обмоток следует выбирать так, чтобы не превысить максимальной рассеиваемой мощности. Если сравнивать между собой биполярный и униполярный двигатели, то биполярный имеет более высокую удельную мощность. При одних и тех же размерах биполярные двигатели обеспечивают больший момент.
При одних и тех же размерах биполярные двигатели обеспечивают больший момент.
6-ти выводные шаговые двигатели
Для подключения 6-ти выводного шагового двигателя к классическому биполярному драйверу может быть выбран один из двух способов — униполярное либо биполярное подключение обмоток двигателя.
Униполярное подключение
Если требуется вращать двигатель на средних и высоких скоростях (из диапазона рабочих скоростей), лучший тип подключения — использовать центральный отвод. Электрические характеристики двигателя — ток обмотки, сопротивление обмотки, статический крутящий момент, индуктивность обмоток и др. — в этом случае равны данным, приведенным в каталоге.
Биполярное подключение
Если требуется вращать двигатель на низких скоростях (из диапазона рабочих скоростей), лучший тип подключения — биполярное. Электрические характеристики двигателя — ток обмотки, сопротивление обмотки, статический крутящий момент, индуктивность обмоток и др. — в этом случае равны данным, приведенным в каталоге. При таком типе подключения нужно уменьшить ток, подаваемый на обмотки двигателя в √2 раз. Например, если номинальный рабочий ток двигателя составляет 2 А, то при последовательном включении обмоток требуемый ток — 1.4 А, то есть в 1.4 раза меньше. Это можно легко понять из следующих рассуждений. Номинальный рабочий ток, указанный в каталоге, рассчитан на сопротивление одной обмотки (R — именно оно приведено в каталоге). При последовательном включении обмоток сопротивление объединенной обмотки возрастает в два раза (2R).
— в этом случае равны данным, приведенным в каталоге. При таком типе подключения нужно уменьшить ток, подаваемый на обмотки двигателя в √2 раз. Например, если номинальный рабочий ток двигателя составляет 2 А, то при последовательном включении обмоток требуемый ток — 1.4 А, то есть в 1.4 раза меньше. Это можно легко понять из следующих рассуждений. Номинальный рабочий ток, указанный в каталоге, рассчитан на сопротивление одной обмотки (R — именно оно приведено в каталоге). При последовательном включении обмоток сопротивление объединенной обмотки возрастает в два раза (2R).
Потребляемая мощность при униполярном включении — Iуниполяр.2 * R
При последовательном включении обмоток потребляемая мощность становится Iбиполяр.2 * 2 * R
Потребляемая мощность не зависит от типа подключения, поэтому Iуниполяр.2 * R = Iбиполяр.2 * 2* R, откуда
Iбиполяр.= Iуниполяр. / √2, т.е.
Iбиполяр.= 0.707 * Iуниполяр.
Так как крутящий момент двигателя прямо пропорционален величине магнитного поля, создаваемого обмотками статора, то он возрастает с увеличением числа витков обмотки и убывает с уменьшением ток, пропускаемого через обмотки. Но так как ток уменьшился в √2 раз, а число витков обмотки увеличилось в 2 раза, то крутящий момент возрастет в √2 раз.
Но так как ток уменьшился в √2 раз, а число витков обмотки увеличилось в 2 раза, то крутящий момент возрастет в √2 раз.
Tбиполяр. = 1.4 * Tуниполяр.
8-ми выводные шаговые двигатели
Для подключения 8-ми выводного шагового двигателя (то есть двигателя с четырьмя обмотками) к классическому биполярному драйверу может быть выбран один из трех способов — униполярное, последовательное либо параллельное подключение обмоток двигателя.
Если требуется вращать двигатель на средних скоростях (из диапазона рабочих скоростей), лучший тип подключения — использовать лишь две из четырех обмоток.
Наиболее эффективно для низкоскоростного диапазона рабочих скоростей двигателя.
При таком типе подключения нужно уменьшить ток, подаваемый на обмотки двигателя в √2 раз. Например, если номинальный рабочий ток двигателя составляет 2 А, то при последовательном включении обмоток требуемый ток — 1.4 А, то есть в 1.4 раза меньше.
Это можно легко понять из следующих рассуждений.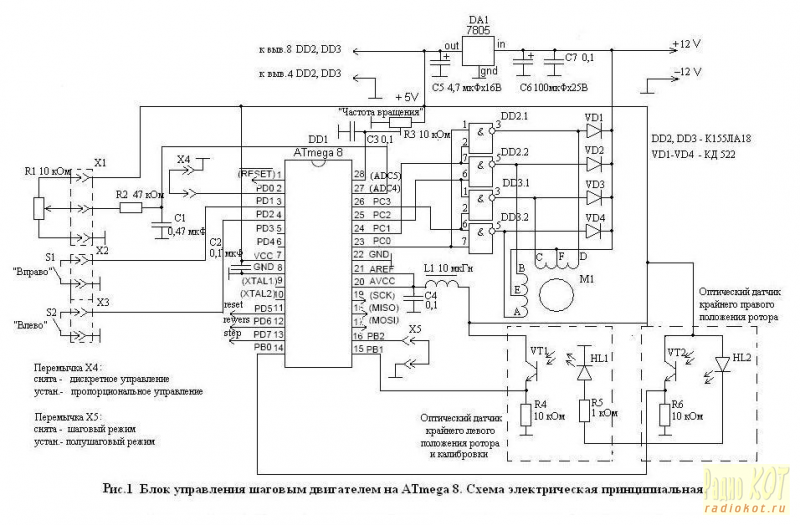
Номинальный рабочий ток, указанный в каталоге, рассчитан на сопротивление одной обмотки (R — именно оно приведено в каталоге). При последовательном включении обмоток сопротивление объединенной обмотки возрастает в два раза (2R).
Потребляемая мощность при униполярном включении — Iуниполяр.2 * R
При последовательном включении обмоток потребляемая мощность становится Iпослед.2 * 2 * R
Потребляемая мощность не зависит от типа подключения, поэтому Iуниполяр.2 * R = Iпослед.2 * 2* R, откуда
Iпослед.= Iуниполяр. / √2, т.е.
Iпослед.= 0.707 * Iуниполяр.
Так как крутящий момент двигателя прямо пропорционален величине магнитного поля, создаваемого обмотками статора, то он возрастает с увеличением числа витков обмотки и убывает с уменьшением ток, пропускаемого через обмотки. Но так как ток уменьшился в √2 раз, а число витков обмотки увеличилось в 2 раза, то крутящий момент возрастет в √2 раз.
Tпослед. = 1.4 * Tуниполяр.
Наиболее эффективно использование параллельного включения обмоток для высоких скоростей.
При таком типе подключения нужно увеличить ток, подаваемый на обмотки двигателя в √2 раз. Например, если номинальный рабочий ток двигателя составляет 2 А, то при параллельном включении обмоток требуемый ток — 2.8 А, то есть в 1.4 раза больше.
Это можно легко понять из следующих рассуждений.
Номинальный рабочий ток, указанный в каталоге, рассчитан на сопротивление одной обмотки (R — именно оно приведено в каталоге). При параллельном включении обмоток сопротивление объединенной обмотки уменьшаетсяв два раза (0.5 R).
Потребляемая мощность при униполярном включении — Iуниполяр.2 * R
При параллельнном включении обмоток потребляемая мощность становится 0.5 * Iбиполяр.2 * R
Потребляемая мощность не зависит от типа подключения, поэтому Iуниполяр.2 * R = 0.5 * Iбиполяр. 2 * R, откуда Iбиполяр..= Iуниполяр. /√2, т.е.
Iбиполяр.= 1.4 * Iуниполяр.
Так как крутящий момент двигателя прямо пропорционален величине магнитного поля, создаваемого обмотками статора, то он возрастает с увеличением числа витков обмотки и убывает с уменьшением величины тока, пропускаемого через обмотки. Но так как ток увеличился в √2 раз, а число витков обмотки увеличилось в 2 раза, то крутящий момент возрастет в √2 раз.
Но так как ток увеличился в √2 раз, а число витков обмотки увеличилось в 2 раза, то крутящий момент возрастет в √2 раз.
Tбиполяр. = 1.4 * Tуниполяр.
При выборе шагового двигателя одной из важнейших характеристик является его скоростные качества, то есть зависимость момента на валу от скорости вращения. Сравнить и оценить эту характеристику можно зная значения сопротивления и индуктивности обмоток выбираемого двигателя. Чем больше соотношение R/L тем быстрее нарастает ток в обмотках и тем большую скорость вращения можно достичь без существенного падения момента. Объясняется это тем, что эквивалентная схема представляет собой последовательно соединенные индуктивность и омическое сопротивление, возникающая в цепи ЭДС самоиндукции препятствует изменению тока в цепи, замедляя его возрастание, а также спад тока при размыкании цепи. Ток не может вырасти мгновенно до номинального значения, а следовательно, крутящий момент двигателя тоже нарастает не мгновенно, а по экспоненте. При увеличении скорости вращения не только увеличивается скорость коммутации обмоток, но также уменьшается время, на которое подается напряжение на обмотку. При критической скорости ток в обмотке двигателя еще не успевает вырасти до номинального значения, а напряжение с обмотки уже снимается. Происходит снижение крутящего момента, двигатель начинает пропускать шаги.
При увеличении скорости вращения не только увеличивается скорость коммутации обмоток, но также уменьшается время, на которое подается напряжение на обмотку. При критической скорости ток в обмотке двигателя еще не успевает вырасти до номинального значения, а напряжение с обмотки уже снимается. Происходит снижение крутящего момента, двигатель начинает пропускать шаги.
Интернет магазин чпу станков хобби класса и комплектации
Расчет шаговых двигателей для ЧПУ
Определение силы
Чтобы определиться с выбором мотора, нужно просчитать его шаговые параметры. Например, определить силу трения (она зависит от тех материалов, которые используются при работе на станке). Для расчета силы трения коэффициент трения умножается на вес системы движения.
СПРАВКА! Для расчета инерции масса стола (она считается вместе с деталью) умножается на необходимый показатель ускорения.
Полная сила сопротивления рассчитывается следующим образом: складываются силы резания, инерции и трения.
Расчет мощности
Мощность мотора рассчитывается по следующей формуле: F = ma. В данной формуле F — сила (ее измеряют в ньютонах), которая прикладывается для приведения объекта в движение; m — масса объекта, a — нужное ускорение.
Расчет редукции оборотов
Эта характеристика высчитывается исходя из начальных оборотов привода и максимального показателя скорости, при которой перемещается стол.
К примеру, скорость равна 2000 мм/мин, а шаг винта передачи — 20 мм. Тогда редукция оборотов будет равняться 100 (2000/20).
Типы шаговых двигателей
Основные виды шаговых двигателей:
• с переменным магнитным сопротивлением
• с постоянными магнитами
• гибридные.
Шаговые двигатели с переменным магнитным сопротивлением
У двигателей с переменным магнитным сопротивлением в роторе нет постоянных магнитов. Их ротор выполнен из магнитомягкого материала и имеет зубчатую форму. Магнитный поток замыкается через ближайшие к полюсам статора зубцы.
Будет интересно➡ Что такое асинхронный двигатель и принцип его действия
Зубцы притягиваются к полюсам. Этим и обеспечивается вращение. При тех же размерах, двигатели с переменным магнитным сопротивлением имеют меньший крутящий момент, чем другие типы шаговых двигателей. Применяются они довольно редко.
Двигатели с постоянными магнитами
У шаговых двигателей этого вида ротор содержит постоянные магниты. Общий принцип действия шагового двигателя идентичен двигателям с постоянным магнитом. Только в реальных двигателях магнитов больше. Вот пример двигателя с тремя парами полюсов ротора. У реальных двигателей с постоянными магнитами число шагов на оборот доходит до 48, что соответствует углу шага 7,5 °.
Гибридные двигатели
Гибридные двигатели обеспечивают меньшую величину шага, больший момент и скорость. Число шагов на оборот для такого типа двигателей доходит до 400 (угол шага 0,9°). При этом они более сложные в изготовлении и более дорогие. Я не хочу забивать читателю голову конструкцией этих двигателей.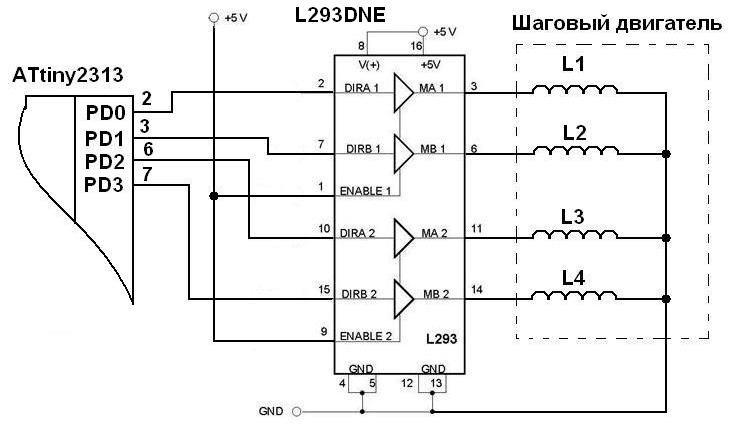 У них есть и зубчатый ротор, и постоянные магниты.
У них есть и зубчатый ротор, и постоянные магниты.
По принципу действия гибридные двигатели эквивалентны двигателям с постоянными магнитами, но с гораздо большим числом полюсов. Это самый распространенный тип шаговых двигателей.
УНИПОЛЯРНЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ
Униполярные шаговые двигатели, так же как и биполярные, имеют две обмотки, и каждая из них имеет центральный отвод. В зависимости от требуемого направления магнитного поля, в работу включается соответствующая половина обмотки, что достигается простым переключением ключей и существенно упрощает схему драйвера.
Подобный механизм позволяет в качестве управляющей системы использовать простейший униполярный драйвер с четырьмя ключами.
Униполярный двухфазный шаговый двигатель имеет шесть выводов. Но так же бывает, что средние отводы катушек внутри соединены, что позволяет шаговому двигателю иметь только пять выводов.
Благодаря простоте в эксплуатации, данные двигатели имеют широкую популярность среди как новичков любителей, так и во многих промышленных отраслях, поскольку униполярный шаговый двигатель является самым примитивным и дешевым способом получить высокоточные угловые движения.
БИПОЛЯРНЫЕ ШАГОВЫЕ ДВИГАТЕЛИ
С биполярными шаговыми двигателями дело обстоит немного иначе. Данные двигатели имеют только одну обмотку в одной фазе. Управляющая схема биполярного двигателя должна быть намного сложнее, чтобы менять направление магнитного поля с целью изменить направление тока в обмотке. Этого можно достигнуть с помощью схемы H-bridge. К тому же, для упрощения задачи можно приобрести несколько драйверных чипов, которые вам помогут.
Биполярные шаговые двигатели, в отличие от униполярных имеют два вывода на одну фазу, ни один из которых не является общим. Иногда H-brigde сопровождают статические эффекты трения, что происходит с определенными приводными топологиями, однако это легко можно исправить, сгладив сигнал шагового двигателя на более высоких частотах.
Униполярные шаговые двигатели, в отличие от биполярных, имеют два вывода за фазу, ни одна из которых не является общей. Иногда H-brigde сопровождают статические эффекты трения, что происходит с определенными приводными топологиями, однако это легко можно исправить, сгладив сигнал шагового двигателя на более высоких частотах.
ЛИНЕЙНЫЕ ШАГОВЫЕ СИНХРОННЫЕ ДВИГАТЕЛИ
С целью автоматизации некоторых производственных процессов на предприятии, иногда возникает необходимость перемещения объектов в плоскости. Чтобы это сделать, потребуется использовать специальный преобразователь вращательного движения в поступательное, что достигается путем применения кинематики.
При помощи линейных шаговых двигателей можно преобразовать импульсную команду прямо в линейное перемещение, что значительно упростит кинематическую схему всевозможных электрических приводов.
Принципиальная схема работы линейного шагового двигателя
Статор в данном приводе представлен в виде магнитомягкой плиты, а провода подмагничиваются путем работы постоянного магнита.
Зубцовые деления в статоре и подвижной части одинаковые, при этом они могут быть сдвинуты на половину деления в пределах одного провода ротора. Поток подмагничивания и его магнитное сопротивление, в данном случае, не зависят от того, где находится подвижная часть двигателя.
Чтобы переместить объект в плоскости согласно двум координатам, применяют двигатели двухкоординатного типа.
Также в линейных двигателях используется магнитно-воздушная подвеска. Благодаря силе магнитного притяжения ротор притягивается к статору. Далее под ротор сквозь форсунки нагнетают воздух в сжатом виде, вследствие чего появляется сила, отталкивающая ротор от статора.
Так между ними возникает воздушная подушка и ротор висит над статором с наличием минимально зазора. Это и обеспечивает минимум сопротивления движения ротора и высокоточное позиционирование.
Дополнительные рекомендации по выбору
Кроме всех перечисленных показателей, стоит учитывать еще и следующие параметры:
- Стоимость. Рекомендуется внимательно изучить цену и характеристики моторов. Иногда при одинаковых параметрах разница в цене значительная. Также не стоит ориентироваться на известную фирму. Зачастую за имя производителя добавляется до 30 % стоимости.
- Сложность настройки.
 Для начинающих пользователей станков с ЧПУ лучше выбирать механизм попроще. В сложном двигателе можно запутаться и сломать его.
Для начинающих пользователей станков с ЧПУ лучше выбирать механизм попроще. В сложном двигателе можно запутаться и сломать его. - Назначение устройства. От того, с какой целью будет применяться станок, зависит и характеристика двигателя.
- Схема подключения. Она зачастую определяется от количества проводов.
- Наличие центр-крана. В этом случае обмотка идет совместно с проводами (3 шт.).
При выборе шагового двигателя стоит учитывать все вышеперечисленные параметры. Тогда и мотор прослужит намного дольше, и работать с таким двигателем будет проще и быстрее. При покупке стоит проверять на наличие заводских браков.
Подключение шаговых двигателей
Выбор схемы подключения шагового двигателя зависит от:
- количества проводов в приводе;
- способа запуска механизма.
Будет интересно➡ Малоизвестные факты о двигателях постоянного тока
Существующие модели движков имеют 4, 5, 6 или 8 проводов. Прибор с четырьмя проводами можно подключать только к биполярным устройствам. Он оснащен двумя фазными обмотками, каждая из которых имеет два провода. Для пошагового подключения драйвера необходимо определить пары проводов с непрерывной связью с помощью метра.
Он оснащен двумя фазными обмотками, каждая из которых имеет два провода. Для пошагового подключения драйвера необходимо определить пары проводов с непрерывной связью с помощью метра.
В механизме с шестью проводами каждая обмотка имеет два провода и центральный кран. Движки этой модели характеризуются высокой мощностью и подключаются как к биполярным, так и к однополярным исполнительным устройствам.
В первом случае используется один центр-кран каждой обмотки и один конец провода.
Во втором случае используются все шесть проводов. Разделение провода осуществляется с помощью измерительного прибора.
Отличие пятипроводного мотора от шестипроводной модели заключается в том, что соединение центральных клемм представляет собой сплошной кабель, который выходит к центральному проводу.
Поскольку отделение одной обмотки от другой без разрывов не представляется возможным, необходимо определить центр провода, после чего соединять его с другими проводниками. Это будет самым безопасным и максимально эффективным решением. Затем движок подключается к сети и проводится проверка его работоспособности.
Это будет самым безопасным и максимально эффективным решением. Затем движок подключается к сети и проводится проверка его работоспособности.
Для успешной эксплуатации механизма нужно иметь в виду следующие нюансы:
- Номинальное напряжение производится первичной обмоткой при постоянном токе.
- Изменение начальной скорости крутящего момента прямо пропорционально изменению тока.
- Скорость понижения линейного момента на последующих высоких скоростях зависит от индуктивности обмоток и схемы привода.
Типичные схемы подключения ШД
Схема подключения 6-ти выводного шагового двигателя к драйверу GeckoDrive (биполярное последовательное подключение обмоток)
Схема подключения 8-ми выводного ШД с биполярным параллельным соединением обмоток к драйверу GeckoDrive
Схема подключения 8-ми выводного ШД с биполярным последовательным соединением обмоток к драйверу GeckoDrive
Управление шаговыми электродвигателями
Существуют три режима управления шаговым двигателем:
• полношаговый
• полушаговый
• микрошаговый.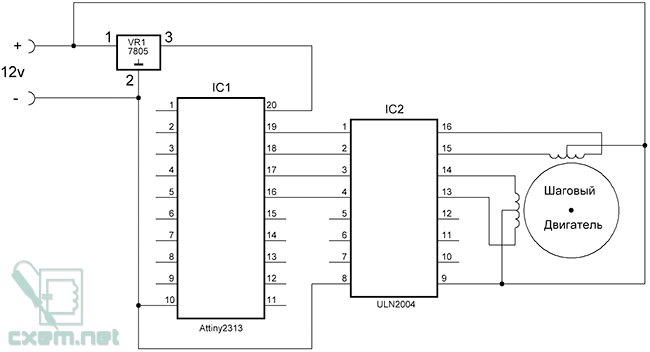
Полношаговый режим управления
Первый способ был описан в примерах выше. Это попеременная коммутация фаз, фазы не перекрываются, в каждый момент времени к источнику напряжения подключена только одна фаза.
Способ называется на английском one phase on full step – одна фаза на полный шаг. Точки равновесия ротора совпадают с полюсами статора. Недостатком этого режима является то, что в один и тот же момент используется половина обмоток для биполярного двигателя, и только четверть для униполярного.
Есть вариант полношагового режима управления при котором в одно и то же время включены две фазы. Называется two-phase-on full step – две фазы на полный шаг. При таком способе ротор фиксируется между полюсами статора за счет подачи питания на все обмотки.
полушаговый режим
Это позволяет увеличить крутящий момент двигателя на 40%. Угол шага не меняется, просто ротор в состоянии равновесия смещен на пол шага. Этот способ позволяет от двигателя получить в два раза больше шагов на оборот ротора.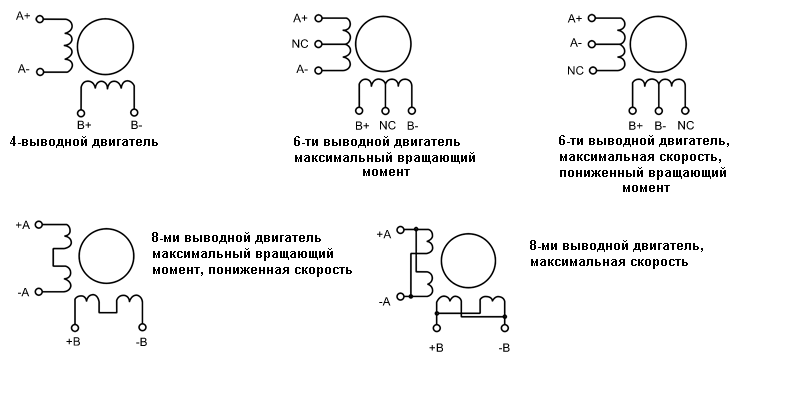
Каждый второй шаг включается одна фаза, а между ними — включаются сразу две.
В результате такой коммутации угловое перемещение шага уменьшается в два раза, или в два раза увеличивается число шагов. Полный момент получить в полушаговом режиме не удается.
Не смотря на это, полушаговый режим используется часто. Уж очень простыми методами он удваивает число шагов двигателя.
Надо помнить, что для обоих режимов справедливо то, что при остановке двигателя со снятием напряжения со всех фаз, ротор двигателя находится в свободном состоянии и может смещаться от механических воздействий.
микрошаговый режми
Чтобы зафиксировать положение ротора, необходимо формировать в обмотках двигателя ток удержания. Этот ток может быть значительно меньше номинального.
Способность шагового двигателя фиксировать свое положение при остановке позволяет обходиться без механических фиксаторов, тормозных систем и т.п.
Управление безколлекторными шд
Для управления шаговым двигателем требуется контроллер.
Контроллер, это схема, подающая напряжение к одной из катушек статора. Контроллер изготовлен на базе интегральной микросхемы типа ULN 2003 включающей в себя комплект составных ключей. Каждый ключ имеет на выходе защитные диоды, которые, позволяют подключать индукционные нагрузки, не требуя дополнительной защиты.
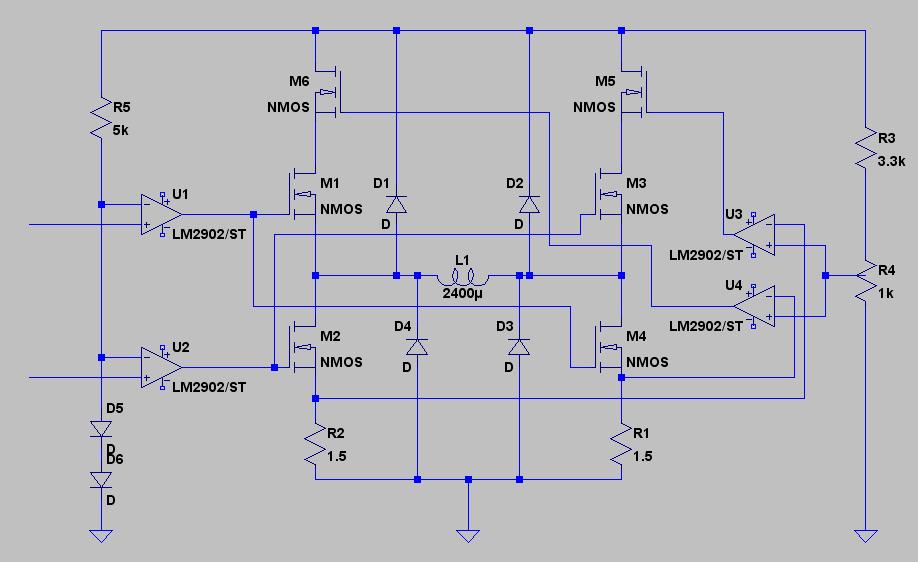
Для управления бесколлекторными двигателями применяется система Н-моста. Который позволяет переключать полярность для реверса шагового двигателя. Может выполняться на транзисторах или микросхемах, которые создают логическую цепочку для перемещения ключей.
Схема Н-моста
Как видите, от источника питания V напряжение подается на мост. При попарном включении контактов S1 – S4 или S3 – S2 будет происходить движение тока через обмотки двигателя. Что и обусловит вращение в ту или иную сторону.
Будет интересно➡ Что такое трехфазный двигатель и как он работает
С контроллером
Устройство контроллера позволяет осуществлять управление шаговым двигателем в различных режимах. В основе контроллера лежит электронный блок, формирующий группы сигналов и их последовательность, посылаемых на катушки статора.
В основе контроллера лежит электронный блок, формирующий группы сигналов и их последовательность, посылаемых на катушки статора.
Для предотвращения возможности его повреждения в случае короткого замыкания или другой аварийной ситуации на самом двигателе каждый вывод защищается диодом, который не пропусти импульс в обратную сторону.
Цифровой тестер шаговых двигателей и драйверов своими руками
Лет так 7 назад, я собирал свой первый ЧПУ станок, который работал на 155 логике и подключался к LTP порту компьютера. Но это длинная история, заслуживающая отдельной статьи, так сказать «С чего все начиналось». Сейчас технологии далеко шагнули и в продаже имеются готовые решения для постройки CNC станков, 3D принтеров. Но, чтобы получить идеальный результат, все узлы в процессе сборки требуют проверки, тестирования. С этой целью я сделал собственный цифровой тестер шаговых двигателей и драйверов.
В качестве источника питания и корпуса использовал имеющуюся готовую сборку неизвестного происхождения.
 Трансформатор имел несколько обмоток, я выбрал ту, где намотка была выполнена двойным проводом и напряжение было большим, чем у остальных обмоток. В итоге, после диодного моста и сглаживающего конденсатора, получил 21 вольт. Для регулятора напряжения использовал китайский DC-DC понижающий преобразователь.
Трансформатор имел несколько обмоток, я выбрал ту, где намотка была выполнена двойным проводом и напряжение было большим, чем у остальных обмоток. В итоге, после диодного моста и сглаживающего конденсатора, получил 21 вольт. Для регулятора напряжения использовал китайский DC-DC понижающий преобразователь.Логическая часть выполнена на arduino pro mini, вывод на дисплей – K0-4B2. Эта часть осталась неизменной с моего вольтамперметра, так как он делался специально для данного тестера шаговых драйверов и двигателей. Дисплей можно поставить любой, подобрав под него необходимую для работы библиотеку.
В тестере имеются дополнительные функции. 1 – ШИМ генератор 0-7500 Гц. Функционал и диапазон можно расширить в скетче. 2 – Лабораторный блок питания до 21 вольта. От перегрузок и короткого замыкания защищает самовосстанавливающийся PTC предохранитель с током срабатывания 2 А.
Скетч старался максимально закомментировать, чтобы каждый смог его адаптировать под свои нужды. Задействованная память mega328 порядка 30%, так что остается место для дополнительных функций или расширения режима автоматического теста шаговых двигателей.
 Скетч для цифрового тестера шаговых двигателей и драйверов можно скачать ЗДЕСЬ.
Скетч для цифрового тестера шаговых двигателей и драйверов можно скачать ЗДЕСЬ.
Страницы:
Шаговый двигатель с редуктором
Шаговый двигатель с редуктором представляет собой электромеханическое устройство, позволяющее преобразовать импульс управления в линейное либо угловое перемещение роторного устройства с фиксированием его в определенном положении без использования дополнительного оборудования обратной связи. Такие агрегаты являются оптимальным вариантом в случаях, когда необходимо прецизионное позиционирование и точное управление параметром скорости, а нужный момент не выходит за допустимые пределы. Червячные моторы широко используются в робототехнике, медицинском и лабораторном оборудовании, автоматизации и т. д. Малогабаритные шаговые редукторы нашли применение в устройствах и приборах, станках с ЧПУ, а также в высокомоментных агрегатах.
Плюсы наших товаровОсновные преимущества работы с нами:
- огромный выбор редукторов для шаговых двигателей, имеющих различные характеристики и параметры, контроллеров, держателей, оборудования в водонепроницаемом корпусе, датчиков и прочих аксессуаров;
- большой ассортимент драйверов;
- наличие редукторного и линейного оборудования;
- вся наша продукция соответствует международным стандартам качества, которые строго контролируются специалистами компании;
- доступная стоимость планетарных редукторов для шаговых двигателей, если сравнивать с поставщиками, сотрудничающими напрямую с производителями.

Если у вас возникли вопросы по выбору или характеристикам безлюфтовых редукторных моторов, задавайте их нашему представителю. Менеджер STEPPERONLINE ответит на любые вопросы и поможет подобрать товар, опираясь на требования и пожелания клиента.
Что нужно знать о доставке и оплатеЕсли вы решили купить редукторный двигатель, оплатить товар можно несколькими способами: с помощью платежной системы PayPal, банковской или дебитной карточки, а также прямого денежного перевода. Работая с PayPal, клиент может в любой момент проверить состояние транзакции.
Одним из основных преимуществ работы с нами является местная доставка и возврат товара. Наличие собственной логистической цепочки позволяет быстро отправить заказ клиенту или вернуть его.
Принцип работы шагового двигателя – ООО «СЗЭМО Электродвигатель»
Шаговые двигатели широко используются в бытовых приборах, транспортных средствах, фрезерных и шлифовальных станках и других производственных механизмах.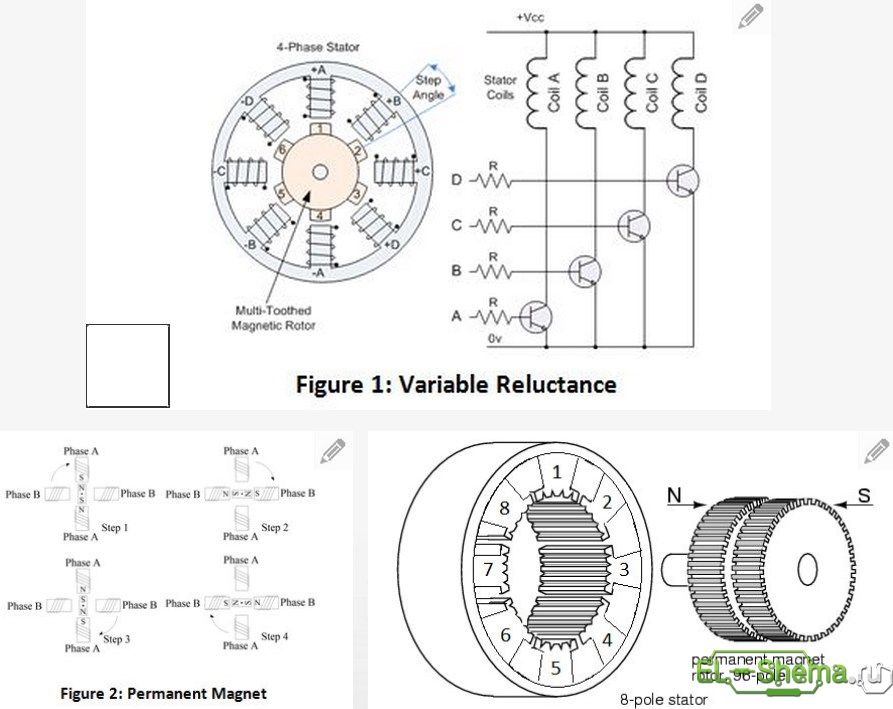 Устройство представляет собой движок постоянного тока, один оборот которого разделен на несколько одинаковых шагов (это обеспечивается благодаря контроллеру). Главное его отличие от моторов других типов – отсутствие щеточного механизма. Шаговый двигатель оснащен блоком управления (приборной панелью), передатчиками и сигнализаторами.
Устройство представляет собой движок постоянного тока, один оборот которого разделен на несколько одинаковых шагов (это обеспечивается благодаря контроллеру). Главное его отличие от моторов других типов – отсутствие щеточного механизма. Шаговый двигатель оснащен блоком управления (приборной панелью), передатчиками и сигнализаторами.
Как работает шаговый электродвигатель
Зная принцип работы шагового двигателя, вы сможете самостоятельно установить его или произвести ремонт. Он функционирует следующим образом:
- После подачи напряжения на клеммы начинается непрерывное вращение специальных щеток. Входные импульсы устанавливают ведущий вал в положение, которое заранее определено.
- Под воздействием импульсов вал перемещается под фиксированным углом.
- Внешняя цепь управления, чаще всего представленная микроконтроллером, возбуждает электромагниты зубчатого типа. Один из них (тот, к которому приложена энергия) притягивает к себе зубья шестерни, вследствие чего вал движка делает поворот.
- Будучи выровнены по отношению к ведущему электромагниту, остальные магниты смещаются по направлению к следующей магнитной детали.
- Вращение шестеренки обеспечивается отключением первого электромагнита и включением следующего.
- Шестеренка выравнивается по отношению к предыдущему колесу, после чего весь процесс повторяется столько раз, сколько необходимо.
Данные вращения являются постоянным шагом. Для определения скорости мотора нужно подсчитать количество шагов, требуемых для его полного оборота. Точность работы обеспечивается благодаря микропроцессорным системам управления шаговых двигателей.
Виды шаговых двигателей
Существует несколько разных моделей шаговых двигателей. Если конструкция устройства предусматривает наличие постоянного магнита, принцип работы основан на притяжении или отталкивании статором и ротором электромагнитного мотора. В переменно-шаговом движке ротор изготавливается из железа. Минимально допустимое отталкивание в нем происходит при наименьшем зазоре, что обеспечивает притяжение точек ротора к полюсам магнитного статора.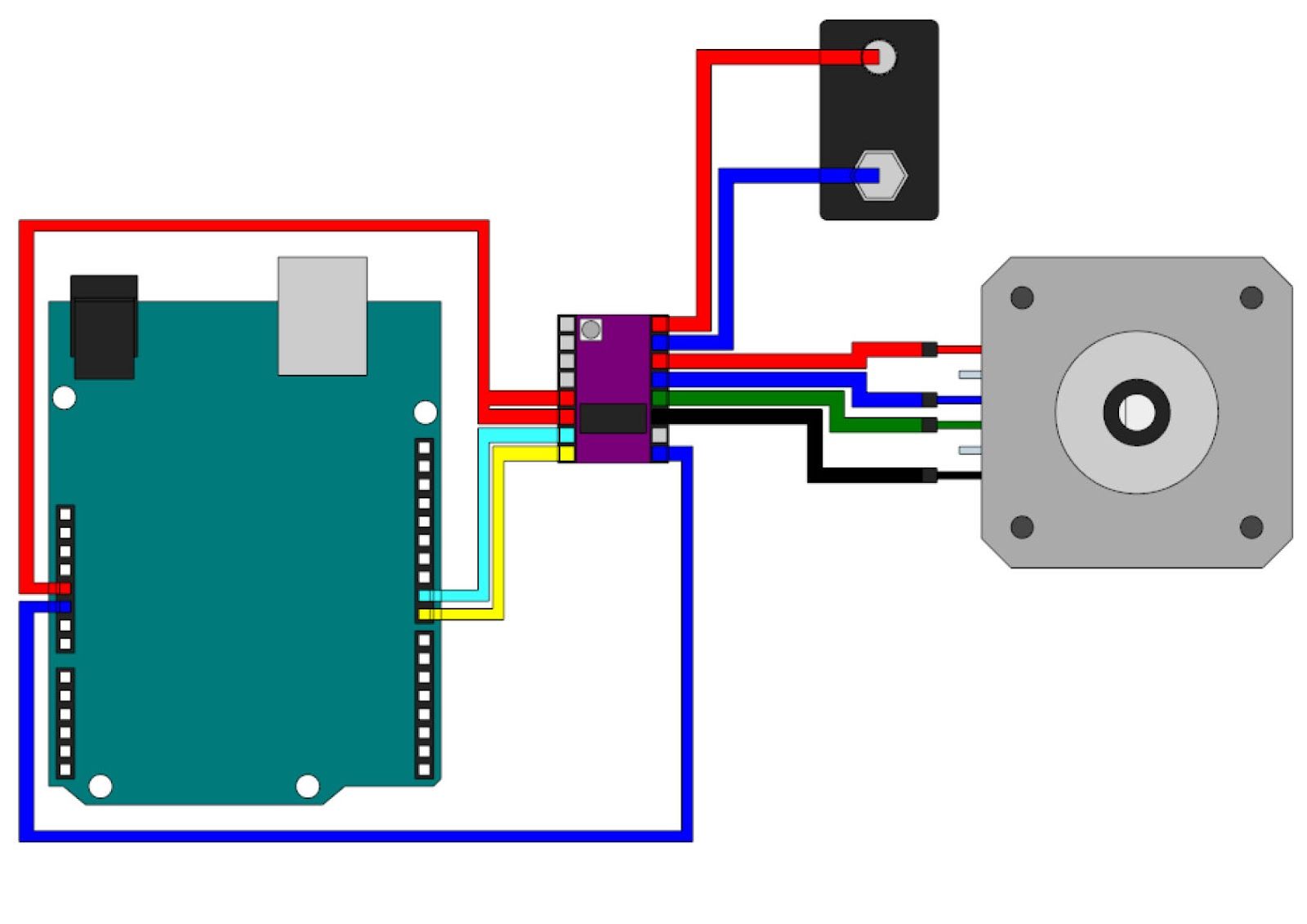 В механизмах гибридного типа оба вышеприведенных принципа сочетаются и дополняют друг друга. Из-за сложности конструкции и изготовления такие приборы стоят дороже, чем остальные модели.
В механизмах гибридного типа оба вышеприведенных принципа сочетаются и дополняют друг друга. Из-за сложности конструкции и изготовления такие приборы стоят дороже, чем остальные модели.
Чаще всего в быту и на производстве применяются двухфазные шаговые двигатели. В зависимости от типа обмотки электромагнитных катушек они подразделяются на:
- униполярные;
- биполярные.
Механизмы первого типа оснащены одной обмоткой. Каждая фаза определяется центральным магнитным краном. При включении определенной секции обмотки обеспечивается нужное направление магнитного поля. Такая конструкция предусматривает работу магнитного полюса без дополнительного переключения, что обеспечивает предельно простую коммутацию цепи, равно как и направления тока. Для работы движка (с учетом фазного переключения) обычно достаточно трех проводов на фазу и шести для выходного сигнала. Микроконтроллер используется для активирования транзистора в нужной последовательности (она определяется программой).
Для подключения обмоток соединительные провода должны прикасаться к постоянным магнитам двигателя. При соединении клемм катушки вал проворачивается с трудом. Поскольку общий провод длиннее, чем провод, соединяющий катушки, сопротивление между торцами проводов и торцами катушек в два раза больше сопротивления между торцом катушки и общим проводом.
В механизмах второго типа есть только одна фазовая обмотка. Управляющая схема такого движка обычно сложнее, так как ток в обмотку поступает при помощи магнитного полюса переломным образом. Два провода на фазу не являются общими.
Трехфазный шаговый двигатель устанавливается на фрезерных станках с ЧПУ, запускаемых с компьютера, и транспортных средствах, в которых используется дроссельная заслонка.
Подключение шагового двигателя
Выбор схемы подключения шагового двигателя зависит от:
- количества проводов в приводе;
- способа запуска механизма.
Существующие модели движков имеют 4, 5, 6 или 8 проводов.
В механизме с шестью проводами каждая обмотка имеет два провода и центральный кран. Движки этой модели характеризуются высокой мощностью и подключаются как к биполярным, так и к однополярным исполнительным устройствам. В первом случае используется один центр-кран каждой обмотки и один конец провода. Во втором случае используются все шесть проводов. Разделение провода осуществляется с помощью измерительного прибора.
Отличие пятипроводного мотора от шестипроводной модели заключается в том, что соединение центральных клемм представляет собой сплошной кабель, который выходит к центральному проводу. Поскольку отделение одной обмотки от другой без разрывов не представляется возможным, необходимо определить центр провода, после чего соединять его с другими проводниками. Это будет самым безопасным и максимально эффективным решением. Затем движок подключается к сети и проводится проверка его работоспособности.
Это будет самым безопасным и максимально эффективным решением. Затем движок подключается к сети и проводится проверка его работоспособности.
Для успешной эксплуатации механизма нужно иметь в виду следующие нюансы:
- Номинальное напряжение производится первичной обмоткой при постоянном токе.
- Изменение начальной скорости крутящего момента прямо пропорционально изменению тока.
- Скорость понижения линейного момента на последующих высоких скоростях зависит от индуктивности обмоток и схемы привода.
Благодаря высокой степени защиты шаговые двигатели успешно работают в тяжелых условиях.
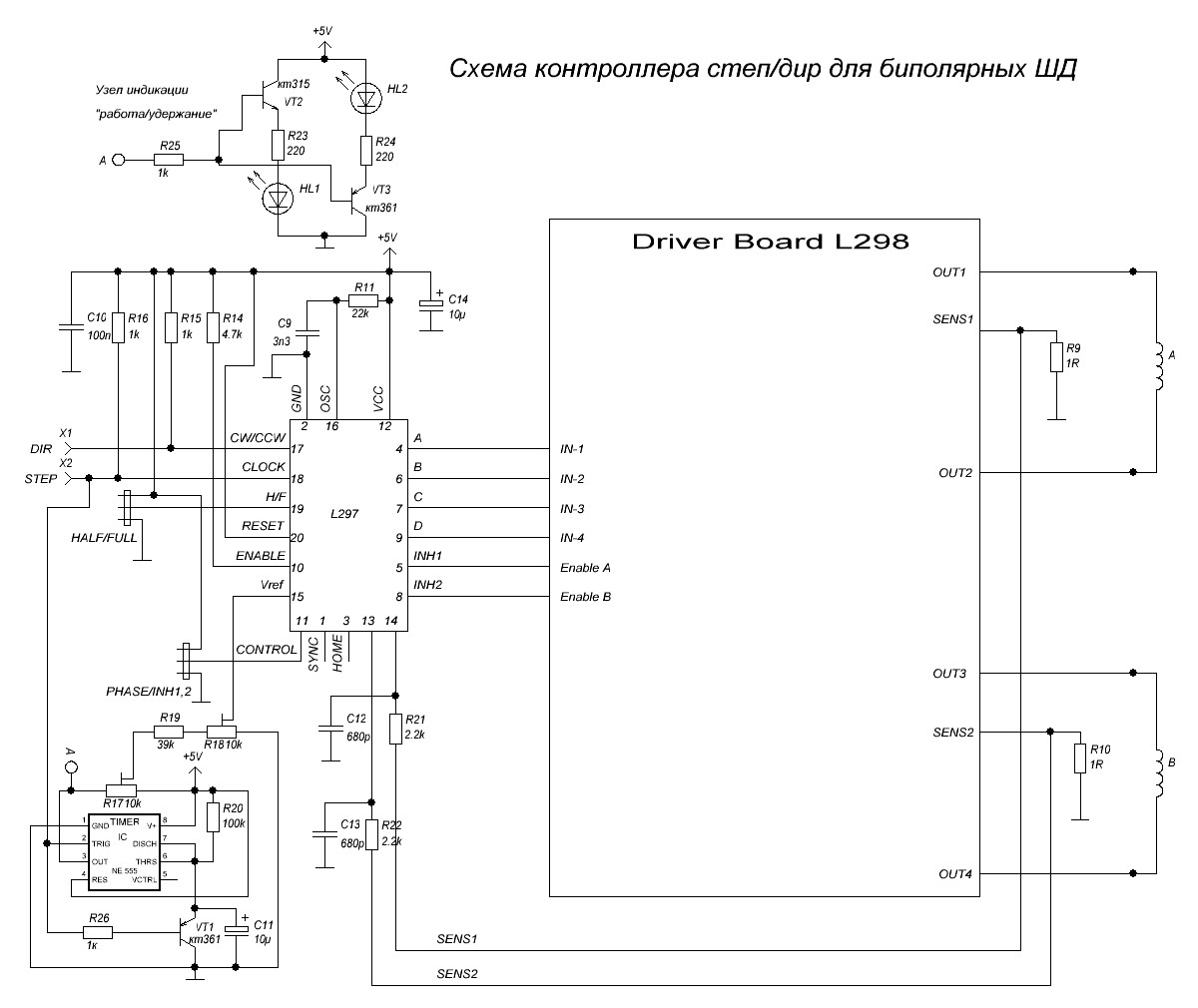
Управление шаговым двигателем с помощью LPT порта компьютера
(Ниже описана несложная разработка, позволяющая управлять шаговым двигателем, подключенным к LPT порту IBM-совместимого компьютера.)
Параллельный порт является великолепным интерфейсом, позволяющим подключать к персональному компьютеру
множество
самых различных устройств. Однако он может быть легко поврежден, поэтому при его использовании для
подсоединения
самодельных внешних устройств нужно быть очень внимательным. Если вы не уверены в том, что вы все делаете
правильно,
сначала проконсультируйтесь у специалистов и только потом экспериментируйте. Ниже приводится краткое
описание
параллельного порта. Параллельный порт имеет несколько линий ввода/вывода, которые могут быть разделены на
две группы
— линии передачи данных и линии сигналов управления. Линии передачи данных — двунаправленные (разумеется,
речь идет о
режимах ЕСР/ЕРР), и именно их мы и будем использовать. В табл.1 описано назначение выводов разъема порта
LPT.
Однако он может быть легко поврежден, поэтому при его использовании для
подсоединения
самодельных внешних устройств нужно быть очень внимательным. Если вы не уверены в том, что вы все делаете
правильно,
сначала проконсультируйтесь у специалистов и только потом экспериментируйте. Ниже приводится краткое
описание
параллельного порта. Параллельный порт имеет несколько линий ввода/вывода, которые могут быть разделены на
две группы
— линии передачи данных и линии сигналов управления. Линии передачи данных — двунаправленные (разумеется,
речь идет о
режимах ЕСР/ЕРР), и именно их мы и будем использовать. В табл.1 описано назначение выводов разъема порта
LPT.
| № выв. | Назва-ние | Направ-ление | Описание |
|---|---|---|---|
| 1 | STROBE | ввод и вывод | устанавливается PC после завершения каждой передачи данных |
| 2/9 | DO-D7 | вывод | 8 линий данных |
| 10 | АСК | ввод | устанавливается в “0” внешним устройством после приема байта |
| 11 | BUSY | ввод | устройство показывает, что оно занято, путем установки этой линии в «1» |
| 12 | Paper out | ввод | для принтеров |
| 13 | Select | ввод | устройство показывает, что оно готово, путем установки на этой линии «1 » |
| 14 | Autofeed | Ввод и вывод | |
| 15 | Error | ввод | индицирует об ошибке |
| 16 | Initialize | Ввод и вывод | |
| 17 | Select In | Ввод и вывод | |
| 18-25 | Ground | GND | общий провод |
 У
этого двигателя оказалось пять выводов. В большинстве источников описываются шаговые двигатели, имеющие шесть
выводов.
Существуют также описания 4-выводных шаговых двигателей, у которых не подключены средние выводы и которые
требуют
двухполярного напряжения для управления. Поиск в Интернете дал ответ: этот шаговый двигатель похож нашаговые
двигатели
сшестью выводами, но две обмотки у него соединены в одной точке, и наружу выведен один провод, подсоединенный
к ним. Для
более подробного знакомства с шаговыми двигателями можно посетить страницу в Интернет по адресу:
www.HowStuffWorks.com,
задав поиск для шаговых двигателей (страница на английском языке — прим. переводчика). Процесс извлечения
двигателя из
дисковода несложен — требуется всего лишь отвернуть несколько винтов. К валу двигателя с помощью винтика
прикреплена
тонкая металлическая полоска, нужно соблюдать осторожность, чтобы не порезаться об нее в процессе ее
извлечения.
У
этого двигателя оказалось пять выводов. В большинстве источников описываются шаговые двигатели, имеющие шесть
выводов.
Существуют также описания 4-выводных шаговых двигателей, у которых не подключены средние выводы и которые
требуют
двухполярного напряжения для управления. Поиск в Интернете дал ответ: этот шаговый двигатель похож нашаговые
двигатели
сшестью выводами, но две обмотки у него соединены в одной точке, и наружу выведен один провод, подсоединенный
к ним. Для
более подробного знакомства с шаговыми двигателями можно посетить страницу в Интернет по адресу:
www.HowStuffWorks.com,
задав поиск для шаговых двигателей (страница на английском языке — прим. переводчика). Процесс извлечения
двигателя из
дисковода несложен — требуется всего лишь отвернуть несколько винтов. К валу двигателя с помощью винтика
прикреплена
тонкая металлическая полоска, нужно соблюдать осторожность, чтобы не порезаться об нее в процессе ее
извлечения. После
извлечения шагового двигателя следует убедиться, что он исправен. Простейший способ это сделать — замкнуть все
выводы
двигателя между собой и попробовать повернуть его вал. Вал должен проворачиваться с трудом, по сравнению с
тем, как он
проворачивается при разомкнутых выводах. Также с помощью тестера можно проверить целостность обмоток
двигателя. Выводы
каждой из обмоток следует пометить. Идентифицировать выводы шагового двигателя можно следующим способом:
После
извлечения шагового двигателя следует убедиться, что он исправен. Простейший способ это сделать — замкнуть все
выводы
двигателя между собой и попробовать повернуть его вал. Вал должен проворачиваться с трудом, по сравнению с
тем, как он
проворачивается при разомкнутых выводах. Также с помощью тестера можно проверить целостность обмоток
двигателя. Выводы
каждой из обмоток следует пометить. Идентифицировать выводы шагового двигателя можно следующим способом:- Подсоедините вывод любой обмотки двигателя к выводу питания +12 В, а к другому выводу этой обмотки — общий провод. Вал должен провернуться на небольшой угол. Пометьте первый вывод цифрой 1.
- Оставьте эти два вывода в одном месте. Теперь подключите выводы других обмоток к источнику питания 12
В. Обратите
внимание, что эти два вывода заставляют шаговый двигатель поворачивать вал на небольшой угол в другую
сторону.
 Отметьте один из них номером 2, другой — номером 4.
Отметьте один из них номером 2, другой — номером 4. - Оставшийся вывод обозначьте номером 3.
Прим. переводчика: я использовал шаговый двигатель от русского дисковода. Тип двигателя: ПБМГ-200-265Ф. Для
определения выводов применялся тестер. При этом я зарисовал схему обмоток, фиксируя на ней измеренные
сопротивления.
Оказалось, что двигатель имеет четыре обмотки. Две обмотки соединены друг с другом и имеют общий провод
белого цвета,
вторые выводы этих обмоток красного и зеленого цвета. Две другие обмотки также соединены друг с другом и
имеют общий
провод черного цвета, вторые выводы этих обмоток голубого и желтого цвета. Если соединить белый и черный
провода,
получается практически та же схема, что и описанная в оригинальной статье. Порядок подключения выводов я
определил
опытным путем.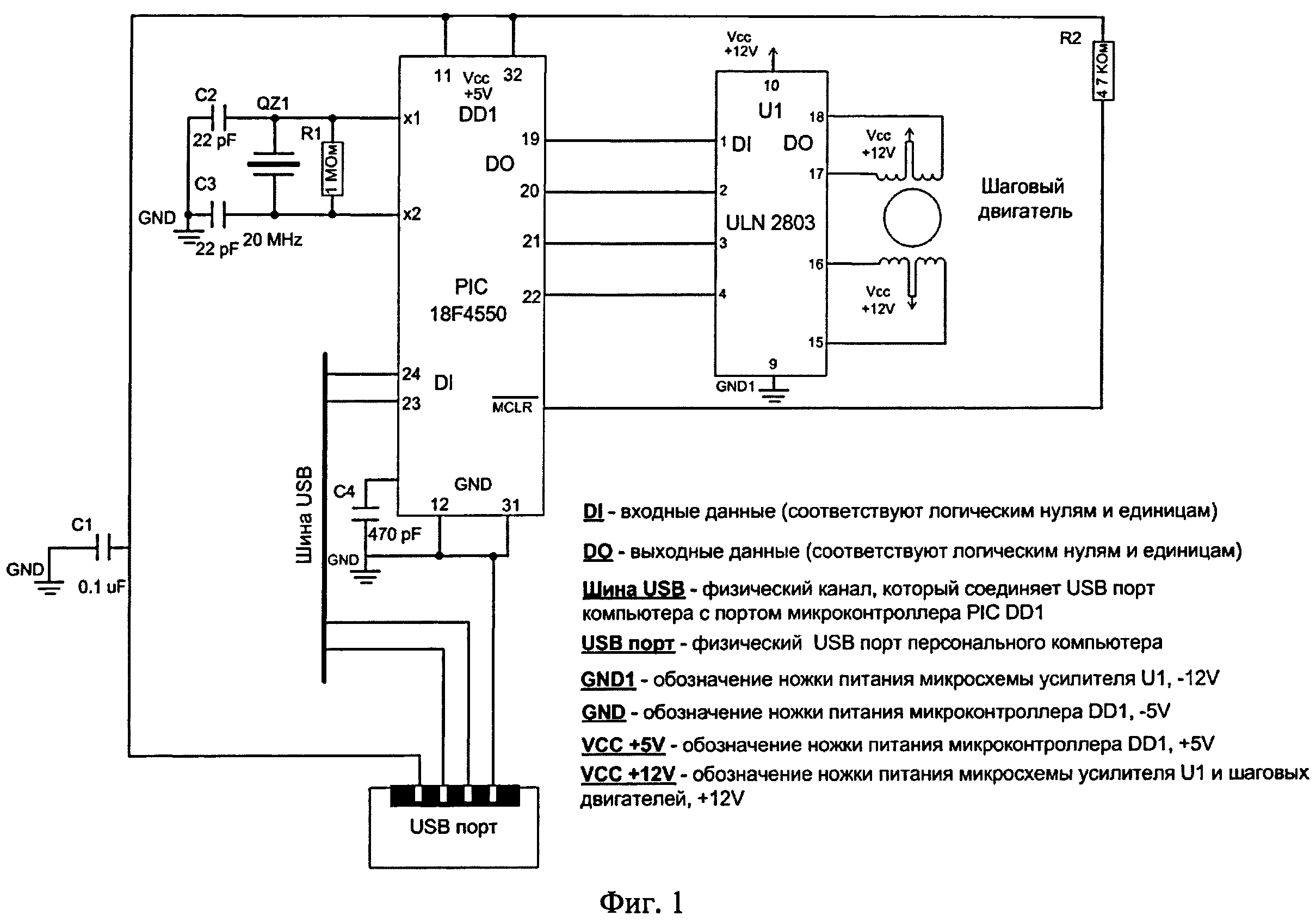
Для управления шаговым двигателем можно использовать микросхему драйвера ULN2003, которая содержит семь
мощных
транзисторных ключей, собранных по схеме Дарлингтона. Каждый ключ способен управлять нагрузкой с током
потребления до
500 мА. Микросхема имеет резисторы в цепи базы, что позволяет напрямую подключить ее входы к обычным
цифровым
микросхемам. Все эмиттеры соединены вместе и выведены на отдельный вывод. На выходах транзисторных ключей
имеются
защитные диоды, что позволяет управлять с помощью этой микросхемы индуктивными нагрузками при минимуме
внешних
компонентов. В нашей конструкции использовано только четыре транзисторных ключа. Электрическая схема
подключения
шагового двигателя показана на рис. 2.
Обратите внимание, что первый вывод шагового двигателя, идентифицированный с помощью описанной ранее
процедуры,
подсоединен к линии DO параллельного порта (разумеется, через микросхему ULN2003). Каждый следующий вывод
подсоединен
к соответствующему выводу параллельного порта. Если порядок подключения выводов шагового двигателя неверный,
вал
мотора будет не вращаться, а лишь поворачиваться на небольшой угол из одной стороны в другую и наоборот.
Общий провод
схемы подсоединен к источнику питания не напрямую, а через стабилитрон. Это сделано с целью защиты схемы от
напряжения
ЭДС самоиндукции, возникающего в катушках при резком выключении напряжения питания схемы.
Каждый следующий вывод
подсоединен
к соответствующему выводу параллельного порта. Если порядок подключения выводов шагового двигателя неверный,
вал
мотора будет не вращаться, а лишь поворачиваться на небольшой угол из одной стороны в другую и наоборот.
Общий провод
схемы подсоединен к источнику питания не напрямую, а через стабилитрон. Это сделано с целью защиты схемы от
напряжения
ЭДС самоиндукции, возникающего в катушках при резком выключении напряжения питания схемы.
Программа, разработанная для описываемого устройства, достаточно проста. Она управляет выводами порта и
формирует на
них специальную последовательность импульсов. Эта последовательность показана в табл. 2 и 3.
Различие между алгоритмами (полным и половинным углом поворота вала на один шаг) состоит в том, что во
втором случае
скорость вращения оказывается в два раза ниже, при этом в два раза уменьшается угол поворота вала двигателя
на каждом
шаге, т. е. увеличивается разрешающая способность системы. Также во втором случае примерно в два раза
увеличивается
потребляемая мощность, и кроме того, двигатель способен развивать в два раза больший крутящий момент.
е. увеличивается разрешающая способность системы. Также во втором случае примерно в два раза
увеличивается
потребляемая мощность, и кроме того, двигатель способен развивать в два раза больший крутящий момент.
Для изменения направления вращения вала двигателя необходимо формировать указанные последовательности в
обратном
порядке.
| № шага | DO | D1 | D2 | D3 |
|---|---|---|---|---|
| 1 | 1 | 0 | 0 | 0 |
| 2 | 0 | 1 | 0 | 0 |
| 3 | 0 | 0 | 1 | 0 |
| 4 | 0 | 0 | 0 | 1 |
| № шага | DO | D1 | D2 | D3 |
|---|---|---|---|---|
| 1 | 1 | 0 | 0 | 0 |
| 2 | 1 | 1 | 0 | 0 |
| 3 | 0 | 1 | 0 | 0 |
| 4 | 0 | 1 | 1 | 0 |
| 5 | 0 | 0 | 1 | 0 |
| 6 | 0 | 0 | 1 | 1 |
| 7 | 0 | 0 | 0 | 1 |
| 8 | 0 | 0 | 0 | 1 |
Ниже приведен короткий пример программы для Turbo С, работающей в операционной системе
MS-DOS. Эта программа заставляет шаговый двигатель вращаться в прямом направлении, в режиме полного угла на
один
шаг.
Эта программа заставляет шаговый двигатель вращаться в прямом направлении, в режиме полного угла на
один
шаг.
Перевод с английского Михаила Голубцова.
Шаговый двигатель в BASCOM-AVR — d.lab
Описан еще один способ «полушагового» управления 2-тактным униполярным шаговым двигателем на Бейсике в BASCOM-AVR микроконтроллером ATtiny2313.
Как правило, у каждого радиолюбителя есть выкрученные из старой радиоаппаратуры 2-тактные униполярные ШД с 6-ю или 5-ю проводами. В современных устройствах они практически не используются, но из них можно много чего сделать. Данный метод не претендует на истину и носит лишь информативный характер. Предполагается, что если вы зашли на эту страничку, значит, Вы знаете, что такое шаговый двигатель. В данной статье не рассматривается применение специализированных микросхем. Цель данной статьи — наработка материала для создания более сложного устройства в будущем на основе одного микроконтроллера.
Итак, рассмотрим схему управления ШД микроконтроллером на примере устройства для проверки шаговых двигателей. Основа устройства МК ATtiny2313, выбран лишь потому, что у него есть необходимое количество ног для развития устройства в будущем. ШД подключен к микроконтроллеру через ULN2003. Это не лучшее решение для постоянной эксплуатации мощного ШД, но для проверки и оценки возможностей вполне достаточно. Как правило ШД выкрученные из старых принтеров и «флоппиков» не выделяются особой мощностью и годятся в основном лишь только «прищепки поворачивать», поэтому максимального тока ULN-ки 500мА вполне хватает. Кнопки управляют направлением вращения двигателя, при нажатии и удержании одной двигатель крутится в одну сторону, при нажатии другой — в другую. Светодиод подтверждает нажатие кнопок.
Но главное в нашем устройстве управляющая программа, поэтому рассмотрим ее в подробностях. Первым делом, как положено, выбираем тип МК и частоту на которой он будет работать.
Потом устанавливаем все выводы порта B как «выход». Выводы 6 и 7 микроконтроллера устанавливаем как «вход», для подключения кнопок. Светодиод подключен к выводу 9 поэтому PORTD.5 «выход» и присваиваем ему имя Led. Для компенсации дребезга контактов устанавливаем продолжительность опроса кнопок оператором Debounce равной 50. Объявляем переменную S и делаем ее равной 1. В зависимости от значения этой переменной программа будет включать и выключать соответствующие выводы порта B.
Здесь запущен основной цикл программы. Т.к. ни одна из кнопок пока еще не нажата, то гасим светодиод и выключаем все выводы порта B, что бы на обмотках двигателя не было напряжения во время ожидания нажатия кнопок. Оператор Debounce бесконечно следит за нажатием кнопок и срабатывает сразу, когда на выводе 6 или 7 появляется низкий уровень, отсылая выполнение программы в соответствующую подпрограмму.
Теперь главное. Нажата кнопка «ВЛЕВО». Включаем светодиод и увеличиваем переменную S на 1. Так как мы управляем двигателем «полушагом», то для упрощения программы выбрано всего 8 вариантов состояния выходов порта B. Поэтому следим за значением переменной S и если оно больше 8, то снова делаем его равным 1. Теперь выбираем одно из состояний выводов порта B соответственно значению переменной S. Ждем несколько микросекунд и проверяем, нажата ли еще кнопка. Если кнопка нажата, то возвращаемся в начало подпрограммы, увеличиваем и проверяем переменную S, переключаем выводы в следующее состояние. Так до тех пор, пока нажата кнопка. Когда отпускаем кнопку, нас после проверки последнего условия автоматом возвращает в основной цикл программы, где программа снова ждет нажатия кнопки.
Так как мы управляем двигателем «полушагом», то для упрощения программы выбрано всего 8 вариантов состояния выходов порта B. Поэтому следим за значением переменной S и если оно больше 8, то снова делаем его равным 1. Теперь выбираем одно из состояний выводов порта B соответственно значению переменной S. Ждем несколько микросекунд и проверяем, нажата ли еще кнопка. Если кнопка нажата, то возвращаемся в начало подпрограммы, увеличиваем и проверяем переменную S, переключаем выводы в следующее состояние. Так до тех пор, пока нажата кнопка. Когда отпускаем кнопку, нас после проверки последнего условия автоматом возвращает в основной цикл программы, где программа снова ждет нажатия кнопки.
При нажатии кнопки «ВПРАВО» все происходит точно также, только теперь переменную S уменьшаем и следим, что бы она не становилась равной 0.
Отдельно нужно сказать об операторе задержки Waitms. Этот оператор регулирует скорость вращения вала двигателя, чем он его значение меньше, тем быстрее крутится вал. Дело в том, что для управления реальным ШД должен применяться оператор Waitus со значением от 1000 до 5000, но Proteus 7.10 отказывается симулировать схему на такой скорости. Поэтому для симуляции ставим в программу Waitms 50 и двигатель в Proteus-е весело крутится. А для реального ШД ставим Waitus 1000 иначе он будет просто дергаться при нажатии кнопки. Также, возможно, придется подобрать это значение под конкретный двигатель. Бывает так, что один мотор прекрасно и бесшумно крутится с значением Waitus 1000, а другой мычит на месте. Изменишь значение на 2000 и все, поехал.
Дело в том, что для управления реальным ШД должен применяться оператор Waitus со значением от 1000 до 5000, но Proteus 7.10 отказывается симулировать схему на такой скорости. Поэтому для симуляции ставим в программу Waitms 50 и двигатель в Proteus-е весело крутится. А для реального ШД ставим Waitus 1000 иначе он будет просто дергаться при нажатии кнопки. Также, возможно, придется подобрать это значение под конкретный двигатель. Бывает так, что один мотор прекрасно и бесшумно крутится с значением Waitus 1000, а другой мычит на месте. Изменишь значение на 2000 и все, поехал.
Если после сборки и подключения двигатель не крутится, мычит или дергается в разные стороны проверяем сначала правильность подключения его обмоток. Можно просто методом «научного тыка» перебрать все возможные варианты. Так же внимательно программируем «фьюзы». Если мотор медленно, но верно «тикает» или пытается двинуться в нужном направлении можно попробовать изменить значение оператора Waitus.
Материалы к статье
DIY Анализатор шаговых двигателей, разработанный для ваших 3D-принтеров
Если у вас есть 3D-принтер и вы хотите анализировать сигналы шагового двигателя без использования компьютера и дорогостоящего анализатора шаговых двигателей, то эта недорогая конструкция оборудования может решить вашу проблему.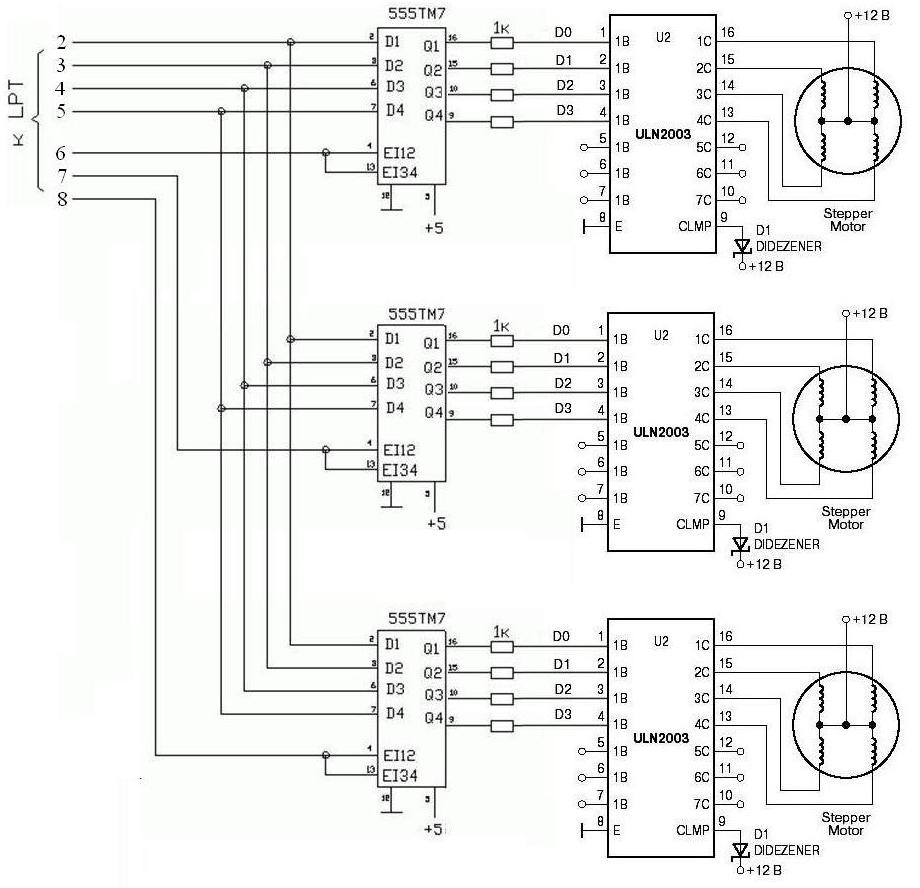 Анализатор с открытым исходным кодом поставляется с простой в использовании настройкой и может быть легко собран, чтобы дать вам возможность тестировать каждый параметр шагового двигателя.
Анализатор с открытым исходным кодом поставляется с простой в использовании настройкой и может быть легко собран, чтобы дать вам возможность тестировать каждый параметр шагового двигателя.
“Анализатор является автономным, имеет два 4-проводных сквозных разъема, соединяющих шаговый двигатель, питается от обычного зарядного устройства 5 В с помощью кабеля micro-USB, обеспечивает простой в использовании графический интерфейс пользователя с 3.5-дюймовый цветной сенсорный экран, обеспечивающий множество измерений шагового двигателя, – отмечает его создатель Zapta.
Когда дело доходит до работы оборудования, это кажется очень простым, поскольку шаговый двигатель подключается к устройству через 4-проводные сквозные соединители, которые контролируют ток через катушку шагового двигателя. Аппаратное обеспечение способно измерять ток катушки 100 000 раз в секунду, оставляя остальную тяжелую работу на прошивке, которая извлекает, анализирует и отображает ток на цветном сенсорном экране.
Чтобы начать работу с оборудованием, сначала выключите оборудование (например, 3D-принтер), затем «отсоедините четыре провода шагового двигателя и соедините их через два проходных разъема анализатора». Для питания устройства используйте зарядное устройство на 5 В и кабель micro-USB, который, по-видимому, является наиболее востребованным вариантом питания для пользователя. На этом настройка завершена, после чего включают оборудование и шаговый двигатель и анализируют сигналы на простом анализаторе шагового двигателя.
Одним из интересных фактов об аппаратном обеспечении является то, что в параметрах настроек вы можете откалибровать анализатор, и эта память сохраняется в энергонезависимой памяти, сохраняя данные нетронутыми даже при отключении питания.
Что касается аппаратного обеспечения этого фантастического анализатора шаговых двигателей, то это специальная печатная плата с 32-битным микроконтроллером STM32F401CE, работающим на частоте 84 МГц. Этот анализатор размером 97 x 66 мм оснащен цветным дисплеем размером 480 x 320 пикселей с емкостным сенсорным экраном, обеспечивающим пользователю первоклассный опыт. Поскольку это проект с открытым исходным кодом, Zapta предоставила все файлы схемы и спецификации на GitHub.
Поскольку это проект с открытым исходным кодом, Zapta предоставила все файлы схемы и спецификации на GitHub.
Если вы создадите свой собственный анализатор шаговых двигателей, подобный этому, то прошивка прошивки станет такой же простой, как и могла бы быть.«Разработчикам программного обеспечения мы рекомендуем использовать StLink V2 и SWD, которые хорошо поддерживаются IDE platformio и допускают отладку и пошаговое выполнение. Конечным пользователям рекомендуется использовать встроенный протокол DFU анализатора. “Процессор STM32, такой как тот, который мы здесь используем”, – предполагает разработчик.
Для загрузчика DFU инструкции доступны на веб-сайте Adafruit. Как упоминалось ранее, одним из основных преимуществ проекта с открытым исходным кодом является возможность настройки конечного продукта в соответствии с требованиями.Вы можете изменить прошивку, доступную в репозитории GitHub. Дизайнер использовал STM32 C ++ Platformio с фреймворком Arduino.
Создавая собственное оборудование, Zapta указал, что доступная прошивка предполагает использование кристалла 25 МГц, поэтому для микроконтроллера, который работает на кристалле 8 МГц, вам необходимо будет соответствующим образом изменить прошивку. Если вас интересует проект, перейдите на его страницу GitHub, где вы найдете более подробную информацию.
Если вас интересует проект, перейдите на его страницу GitHub, где вы найдете более подробную информацию.
Как правильно установить ограничение тока двигателя в драйвере шагового двигателя A4988
В этом руководстве мы рассмотрим, как правильно установить ограничение тока в драйвере шагового двигателя A4988.Эти драйверы шагового двигателя становятся все более популярными для проектов ЧПУ, 3D-печати, робототехники и Arduino, потому что они действительно дешевы и просты в использовании, требуя всего два контакта для управления ими.
Одна важная вещь, которую необходимо настроить при использовании этих драйверов, – это ограничение тока двигателя. Это особенно важно, когда вы используете более высокое входное напряжение, чем рассчитано на двигатель. Использование более высокого напряжения обычно позволяет получить больший крутящий момент и более высокую скорость шага, но вам нужно будет активно ограничивать количество тока, протекающего через катушки двигателя, чтобы не сжечь двигатель.
Для этого есть два метода: один – использовать мультиметр для физического измерения тока, протекающего через одну из катушек, а второй метод, который мы собираемся рассмотреть, – это вычислить, а затем отрегулировать опорное напряжение на драйвере, которое не требует подключения или питания двигателя.
Вот пошаговое видео о том, как установить ограничение тока двигателя для драйвера шагового двигателя A4988.
Что нужно для установки ограничения тока на шаговом драйвере
Как установить предел тока на вашем драйвере шагового двигателя A4988
В каждом пакете драйверов двигателя вы получите небольшой радиатор, который должен быть прикреплен к микросхеме драйвера, и вам понадобится небольшая отвертка, чтобы отрегулировать этот потенциометр, чтобы установить предел тока.
Мы собираемся установить предел тока двигателя на макетной плате, так как нам нужно перемкнуть контакты спящего режима и сброса, а затем подать питание на логическую схему платы через заземление и контакты VDD. Питание может подаваться от источника 5 В на вашем Arduino.
Начнем с подключения нашего драйвера.
Теперь нам нужно рассчитать опорное напряжение, которое мы собираемся установить.
Это делается по следующей формуле:
Vref = Imot x 8 x Rsen
Опорное напряжение равно максимальному току двигателя, умноженному на 8, а затем на сопротивление измерения тока.
Максимальный ток двигателя указан в паспорте двигателя, у нас – 0,9 А. Текущее сопротивление считывания можно найти в таблице данных вашего драйвера, но чаще всего оно составляет 0,068 Ом для новых драйверов.
Используя эту формулу, мы вычисляем, что опорное напряжение должно быть установлено на 0,49 вольт.
Самый простой способ установить напряжение – это прикрепить отрицательный вывод мультиметра к заземляющему контакту Arduino с помощью одного провода из крокодиловой кожи.
Затем подключите положительный провод к металлической части небольшой отвертки, используя другой провод из крокодиловой кожи.
Теперь вы можете одновременно изменять опорное напряжение и считывать напряжение на мультиметре, что упрощает настройку.
Установите мультиметр в режим измерения постоянного напряжения, а затем поместите отвертку на потенциометр. Теперь вы должны получить значение опорного напряжения. Поворот отвертки против часовой стрелки уменьшает напряжение, а по часовой стрелке увеличивает напряжение.
Мы устанавливаем его на 0,49 В, затем снимаем и заменяем отвертку, чтобы еще раз проверить, и все готово.Теперь вы можете завершить остальные подключения к Arduino или подключить его к 3D-принтеру или щиту драйвера шагового двигателя.
Как вы обычно устанавливаете ограничение тока двигателя драйвера шагового двигателя A4988? Дайте мне знать в разделе комментариев.
DIY Stepper Controller – Введение | PyroElectro
Информация о проектеАвтор: Крис
Сложность: Средняя
Затраченное время: 3 часа
Предпосылки:
Взгляните на вышеупомянутый
уроки перед продолжением
прочитать этот учебник.

Шаговый двигатель – это очень точный и простой в использовании двигатель, который отлично подходит как для начинающих, так и для начинающих. продвинутые любители. Точность, которую обеспечивают шаговые двигатели за счет уникального «шагового» метода движения, позволяет нам всегда знать, где находится двигатель, без какой-либо обратной связи или схема кодирования.
Понимание того, как построить правильную схему управления для шагового двигателя, имеет жизненно важное значение.Зная, сколько тока будет потребляться двигателем, и запланированное напряжение системы имеет важное значение. На протяжении всего этого руководства напряжение моей системы будет составлять 12 В для двигателей, а потребляемый ток не будет превышают 300 мА. Шаговые двигатели могут потреблять большой ток, поэтому проверьте спецификации того, что вы используете.
 Полная плата контроллера шагового двигателя DIY
Полная плата контроллера шагового двигателя DIY Демонстрационная установка
Цель и обзор этого проекта
Целью этого проекта является создание платы специально для управления двухкатушечным шаговым двигателем.Доска должен иметь 4 порта клеммной колодки для 4 проводов шагового двигателя и 4 входных порта для контроллера L297.
Плата должна надежно контролировать шаги, которые выполняет двигатель. Каждый тактовый импульс в цепи выполнит ровно 1 тактный цикл двигателя.
Spin It! – Получите свой собственный усилитель шагового двигателя! BOOST-DRV8711 – Промышленное – Технические статьи
BOOST-DRV8711
Здравствуйте и добро пожаловать обратно! Мы сделали это . .. После всей тяжелой работы готовый продукт здесь, гладкий, с вращающимися моторами.
.. После всей тяжелой работы готовый продукт здесь, гладкий, с вращающимися моторами.
Рисунок 1: BOOST-DRV8711 Автономный
В моих предыдущих сообщениях мы собрали систему по кусочкам, нашли наши компоненты, покорили мощную схему и проверили, проанализировали и проанализировали еще несколько. Все эти шаги помогли нам получить систему привода с шаговым двигателем! Теперь мы хотим поделиться этим со всеми, чтобы вы тоже могли крутить мотор.
Рисунок 2: BOOST-DRV8711 на MSP-EXP430G2
BOOST-DRV8711 – это 8-52V, 4.5A, ступень привода биполярного шагового двигателя на основе предварительного драйвера шагового двигателя DRV8711 и двухканального N-канального NexFET TM Power MOSFET CSD88537ND. Модуль содержит все необходимое для управления различными типами биполярных шаговых двигателей, а также может быть использован в качестве драйвера электродвигателя постоянного тока с двумя щетками. BOOST-DRV8711 идеально подходит для тех, кто хочет узнать больше о методах управления шаговыми двигателями и конструкции ступени привода. Этот комплект был разработан для совместимости со всеми панелями TI LaunchPad в соответствии со стандартом LaunchPad Pinout Standard, при этом для MSP-EXP430G2 LaunchPad с MSP430G2553 предоставляется основная поддержка программного обеспечения / прошивки.
BOOST-DRV8711 идеально подходит для тех, кто хочет узнать больше о методах управления шаговыми двигателями и конструкции ступени привода. Этот комплект был разработан для совместимости со всеми панелями TI LaunchPad в соответствии со стандартом LaunchPad Pinout Standard, при этом для MSP-EXP430G2 LaunchPad с MSP430G2553 предоставляется основная поддержка программного обеспечения / прошивки.
BOOST-DRV8711, несмотря на то, что он компактен, обеспечивает мощность, способную непрерывно выдавать 4,5 А на каждый H-мост. Это позволяет ему управлять широким спектром биполярных шаговых двигателей, представленных сегодня на рынке, без чрезмерного отвода тепла.
Рисунок 3: Максимальный управляющий ток H-мостов A и B
Рисунок 4: Тепловые характеристики при максимальном токе
Приложение для управления двигателем (разработанное с помощью инструментов TI’s Code Composer и GUI Composer), поставляемое с BOOST-DRV8711 для MSP430G2533, позволяет вам быстро вращать практически любой биполярный шаговый двигатель, который у вас есть под рукой, за считанные минуты. Приложение предоставляет профили скорости и шага движения, позволяя при этом точно настраивать параметры привода DRV8711.
Приложение предоставляет профили скорости и шага движения, позволяя при этом точно настраивать параметры привода DRV8711.
Рисунок 5: Приложение для управления шаговым двигателем
С этими инструментами вы готовы запустить свой собственный шаговый двигатель! Спасибо за чтение и не стесняйтесь оставлять любые комментарии или вопросы, которые могут у вас возникнуть!
Вы также можете ознакомиться с более ранними выпусками серии (этапами разработки данной платы) по адресу…
Для получения дополнительной информации посетите форумы TI Motor Driver или посетите домашнюю страницу TI Motor Drive & Control.Если вы хотите создать собственный бустер-пакет, посетите ti.com/byob!
Описание драйвера шагового двигателя
Программное обеспечение контроллера шагового двигателя
| |||||||||
 Есть два основных типа шаговых двигателей:
Есть два основных типа шаговых двигателей: Униполярные двигатели можно подключать как биполярные, не используя провода +.
Униполярные двигатели можно подключать как биполярные, не используя провода +. В автономном режиме внутренний прямоугольный генератор на основе IC2: B в 4093 подает тактовые импульсы на выход OSC. Частота этих импульсов и, следовательно, скорость шагового двигателя регулируется подстроечным резистором VR1 (100 кОм). Последовательный резистор 1 кОм регулирует максимальную частоту. Вы можете увеличить номинал этого резистора для своих нужд. Эти импульсы поступают на вход STEP, который буферизируется и инвертируется IC2: D. Это помогает предотвратить ложное срабатывание. Точно так же IC2: C буферизует и инвертирует вход DIRection.SPDT, подключающий вход к + 5 В постоянного тока или заземляющий, управляет направлением вращения.
В автономном режиме внутренний прямоугольный генератор на основе IC2: B в 4093 подает тактовые импульсы на выход OSC. Частота этих импульсов и, следовательно, скорость шагового двигателя регулируется подстроечным резистором VR1 (100 кОм). Последовательный резистор 1 кОм регулирует максимальную частоту. Вы можете увеличить номинал этого резистора для своих нужд. Эти импульсы поступают на вход STEP, который буферизируется и инвертируется IC2: D. Это помогает предотвратить ложное срабатывание. Точно так же IC2: C буферизует и инвертирует вход DIRection.SPDT, подключающий вход к + 5 В постоянного тока или заземляющий, управляет направлением вращения.
 1). Шестипроводные двигатели выводят каждый центральный отвод отдельно. Два центральных ответвителя должны быть общими снаружи
1). Шестипроводные двигатели выводят каждый центральный отвод отдельно. Два центральных ответвителя должны быть общими снаружи Сначала вставьте резисторы и 4 звена. Используйте отрезки резисторов для перемычек. Добавьте другие компоненты, как показано на оверлее. IRFZ44 размещены спиной к спине. Металлические выступы обозначены полосами на шаблоне наложения. Перед установкой и пайкой сдвиньте 3 клеммных блока вместе. Если вам нужно использовать радиатор для полевых МОП-транзисторов, вам потребуются изолирующие шайбы и втулки на каждой из них, чтобы убедиться, что они электрически изолированы друг от друга.
Сначала вставьте резисторы и 4 звена. Используйте отрезки резисторов для перемычек. Добавьте другие компоненты, как показано на оверлее. IRFZ44 размещены спиной к спине. Металлические выступы обозначены полосами на шаблоне наложения. Перед установкой и пайкой сдвиньте 3 клеммных блока вместе. Если вам нужно использовать радиатор для полевых МОП-транзисторов, вам потребуются изолирующие шайбы и втулки на каждой из них, чтобы убедиться, что они электрически изолированы друг от друга.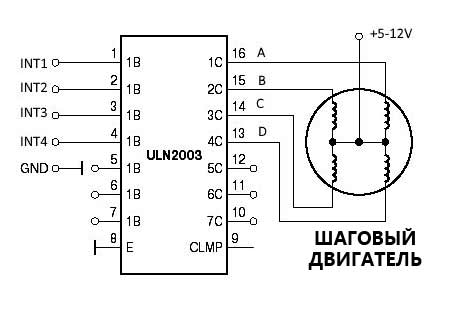 Убедитесь, что переключатель SPDT установлен в положение INTernal. Посмотрите, вращается ли мотор. Если нет, поменяйте местами только провода M1B и M2B и проверьте еще раз. Теперь он должен вращаться. VR1 будет изменять скорость шага.
Убедитесь, что переключатель SPDT установлен в положение INTernal. Посмотрите, вращается ли мотор. Если нет, поменяйте местами только провода M1B и M2B и проверьте еще раз. Теперь он должен вращаться. VR1 будет изменять скорость шага.
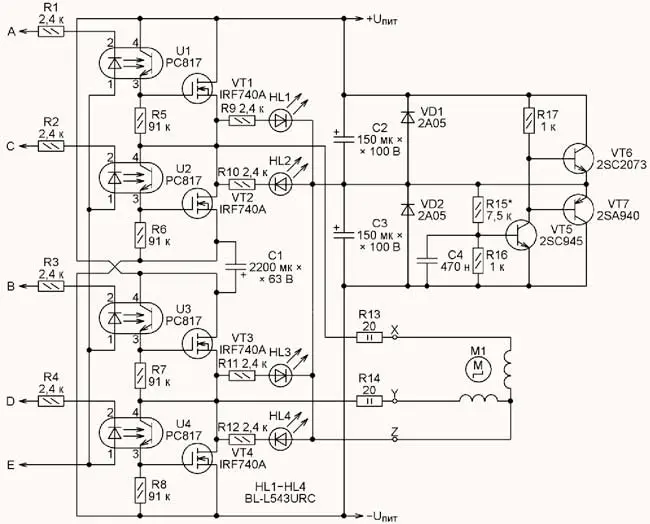
 Этот LC-метр позволяет измерять невероятно малые индуктивности, что делает его идеальным инструментом для изготовления всех типов ВЧ-катушек и индукторов. LC Meter может измерять индуктивность от 10 до 1000 нГн, 1 мкГн – 1000 мкГн, 1 мГн – 100 мГн и емкости от 0,1 пФ до 900 нФ. Схема включает автоматический выбор диапазона, а также переключатель сброса и обеспечивает очень точные и стабильные показания.
Этот LC-метр позволяет измерять невероятно малые индуктивности, что делает его идеальным инструментом для изготовления всех типов ВЧ-катушек и индукторов. LC Meter может измерять индуктивность от 10 до 1000 нГн, 1 мкГн – 1000 мкГн, 1 мГн – 100 мГн и емкости от 0,1 пФ до 900 нФ. Схема включает автоматический выбор диапазона, а также переключатель сброса и обеспечивает очень точные и стабильные показания. Это очень полезное стендовое испытательное оборудование для тестирования и определения частоты различных устройств с неизвестной частотой, таких как генераторы, радиоприемники, передатчики, генераторы функций, кристаллы и т. Д.
Это очень полезное стендовое испытательное оборудование для тестирования и определения частоты различных устройств с неизвестной частотой, таких как генераторы, радиоприемники, передатчики, генераторы функций, кристаллы и т. Д. Его можно подключить к любому типу стереофонического аудиоисточника, например, iPod, компьютеру, ноутбуку, проигрывателю компакт-дисков, Walkman, телевизору, спутниковому ресиверу, магнитофонной кассете или другой стереосистеме для передачи стереозвука с превосходной четкостью по всему дому, офису, двору и т. Д. палаточный лагерь.
Его можно подключить к любому типу стереофонического аудиоисточника, например, iPod, компьютеру, ноутбуку, проигрывателю компакт-дисков, Walkman, телевизору, спутниковому ресиверу, магнитофонной кассете или другой стереосистеме для передачи стереозвука с превосходной четкостью по всему дому, офису, двору и т. Д. палаточный лагерь.

 Он совместим с макетной платой, поэтому его можно подключить к макетной плате для быстрого прототипирования, и на обеих сторонах печатной платы имеются выводы питания VCC и GND.Он небольшой, энергоэффективный, но настраиваемый с помощью встроенной перфорированной платы 2 x 7, которую можно использовать для подключения различных датчиков и разъемов. Arduino Prototype использует все стандартные компоненты со сквозными отверстиями для легкой конструкции, два из которых скрыты под разъемом IC. Плата оснащена 28-контактным разъемом DIP IC, заменяемым пользователем микроконтроллером ATmega328 с загрузчиком Arduino, кристаллическим резонатором 16 МГц и переключателем сброса. Он имеет 14 цифровых входов / выходов (0-13), 6 из которых могут использоваться как выходы ШИМ и 6 аналоговых входов (A0-A5).Эскизы Arduino загружаются через любой USB-последовательный адаптер, подключенный к 6-контактному гнезду ICSP. Плата питается напряжением 2-5 В и может питаться от аккумулятора, такого как литий-ионный элемент, два элемента AA, внешний источник питания или адаптер питания USB.
Он совместим с макетной платой, поэтому его можно подключить к макетной плате для быстрого прототипирования, и на обеих сторонах печатной платы имеются выводы питания VCC и GND.Он небольшой, энергоэффективный, но настраиваемый с помощью встроенной перфорированной платы 2 x 7, которую можно использовать для подключения различных датчиков и разъемов. Arduino Prototype использует все стандартные компоненты со сквозными отверстиями для легкой конструкции, два из которых скрыты под разъемом IC. Плата оснащена 28-контактным разъемом DIP IC, заменяемым пользователем микроконтроллером ATmega328 с загрузчиком Arduino, кристаллическим резонатором 16 МГц и переключателем сброса. Он имеет 14 цифровых входов / выходов (0-13), 6 из которых могут использоваться как выходы ШИМ и 6 аналоговых входов (A0-A5).Эскизы Arduino загружаются через любой USB-последовательный адаптер, подключенный к 6-контактному гнезду ICSP. Плата питается напряжением 2-5 В и может питаться от аккумулятора, такого как литий-ионный элемент, два элемента AA, внешний источник питания или адаптер питания USB.
– Как предотвратить ступенчатые потери с помощью шаговых двигателей
Использование шаговых двигателей – отличный выбор.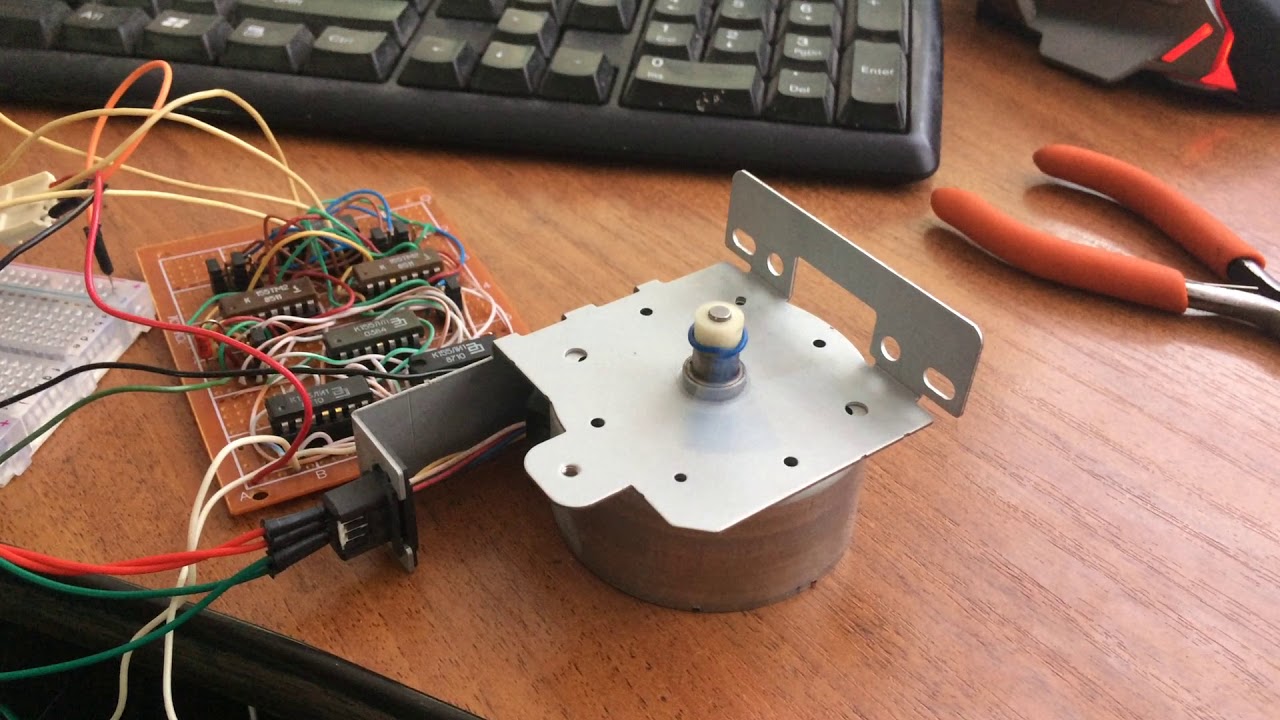 Однако главная проблема – это ступенчатые потери. В большинстве случаев ступенчатые потери можно предотвратить или исправить.
Однако главная проблема – это ступенчатые потери. В большинстве случаев ступенчатые потери можно предотвратить или исправить.
Шаговые двигатели работают без обратной связи. Когда шаговый двигатель не работает должным образом в конкретной ситуации, общий вывод заключается в том, что либо двигатель, либо электроника привода неисправны. Выбор двигателя и выбор контроллера имеют решающее значение. Однако другие факторы способствуют потерям шага.
Следующие моменты важны для изучения для анализа ступенчатых потерь или простоя методическим способом в различных приложениях.
A. Выбор шагового двигателя
Первая задача – выбрать подходящий шаговый двигатель для приложения. Для наилучшего выбора необходимо соблюдать следующие основные теоретические правила:
1. Выберите двигатель на основе максимальной точки крутящего момента / скорости, требуемой для приложения (выбор основан на наихудшем случае)
2.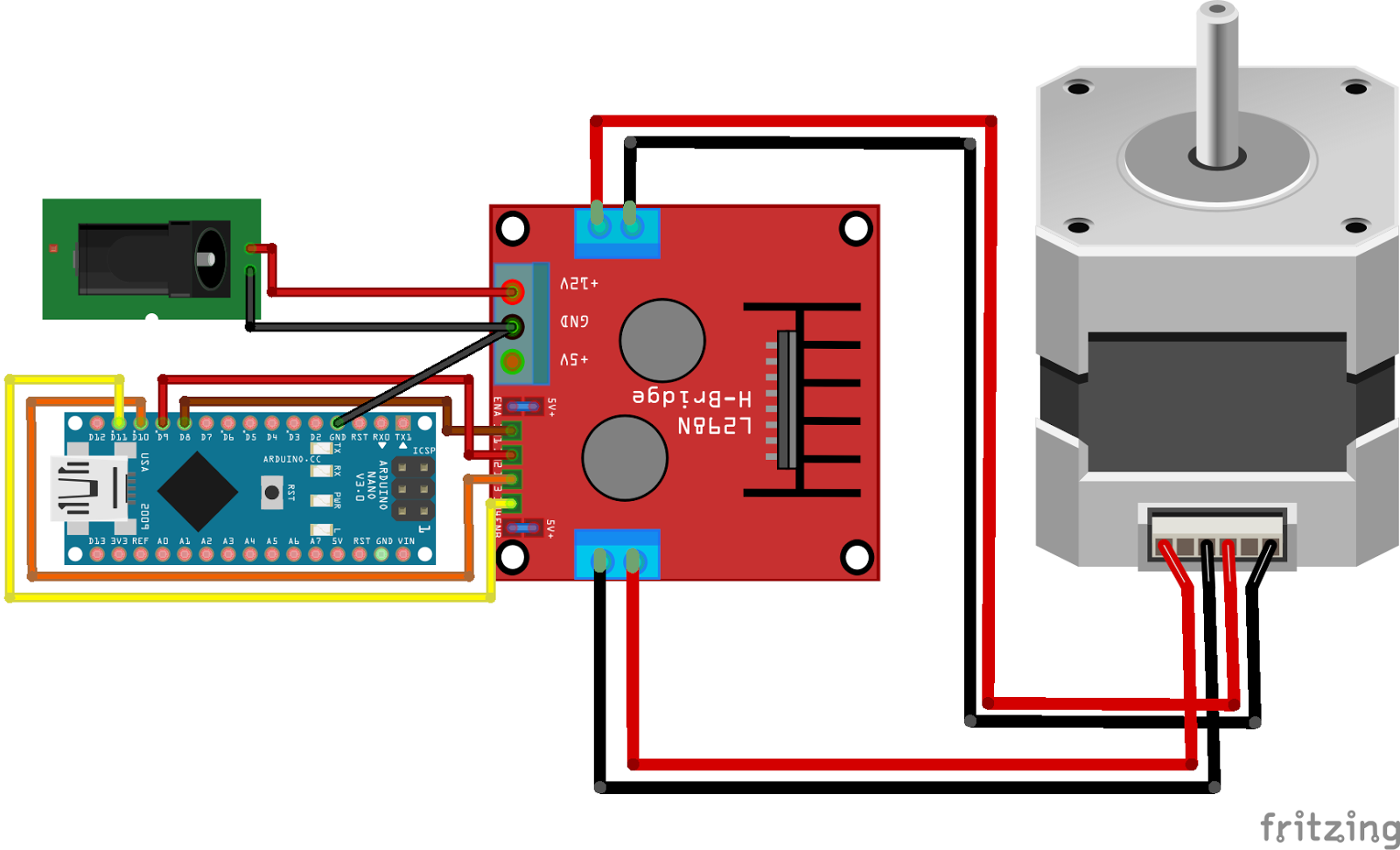 Используйте 30% расчетный запас из опубликованной кривой крутящего момента в зависимости от скорости (тяговое усилие). из кривой).
Используйте 30% расчетный запас из опубликованной кривой крутящего момента в зависимости от скорости (тяговое усилие). из кривой).
3.Убедитесь, что приложение не может быть остановлено внешними событиями
Важно помнить, что шаговый двигатель не работает как двигатель постоянного тока. Параметрирование рабочих точек отсутствует, а фазный ток не увеличивается при увеличении нагрузки. Пока требования приложения к скорости и крутящему моменту находятся в пределах спецификаций двигателя, никаких проблем не возникнет. Если это требование выходит за пределы спецификации, двигатель глохнет (функционирование ОК или НЕ ОК). В любом случае ток в фазах не меняется и сам приспосабливается к ситуации.
Следующим шагом является квалификация двигателя с помощью практических испытаний и проверка наличия ступенчатых потерь во время работы. Учтите, что по конструкции шаговый двигатель не может потерять только одну ступень. Если скорость низкая, он потеряет количество шагов, кратное 4 (8, 12, 16… шагов), а если скорость будет высокой, он перестанет вращаться. В случаях, когда потеряно менее 4 ступеней, причина кроется в коммутации.
В случаях, когда потеряно менее 4 ступеней, причина кроется в коммутации.
Поскольку двигатель обычно не оборудован устройством обратной связи, и поскольку ток двигателя не оказывает никакого влияния, поиск первопричины неисправности не всегда является легкой задачей.
В следующих разделах приводятся некоторые возможные основные причины неудачного прохождения квалификационного теста.
B1. Старт-стоп операция
В этом режиме работы двигатель заблокирован до нагрузки и работает при постоянном скорость. Мотор должен разгонять нагрузку (инерция и трение) в рамках первого шага к заданная частота.
Рисунок 1. Пуск-стоп частотаРежим отказа: двигатель не запускается
БИ 2.Профиль разгона и рампы (трапециевидный)
В этом случае двигателю разрешается разгоняться до максимальной частоты с заданной скоростью ускорения в драйвере.
Рис 2. Трапециевидный профиль скоростиРежим отказа: двигатель не запускается
Причины и решения см.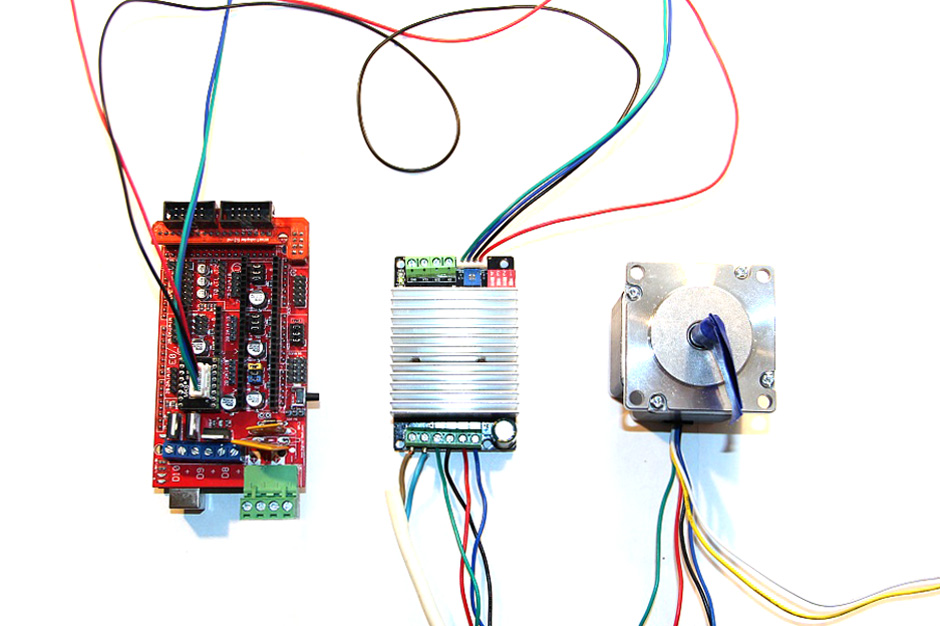 В B1 «Пуск-стоп».
В B1 «Пуск-стоп».
Как объяснялось ранее, шаговый двигатель по своей конструкции теряет число, кратное 4 шагам (8, 12, 16…. Шагов).Если скорость высокая, потеря шага приведет к потере синхронизма. Глохнет мотор. Если количество пропущенных шагов не кратно 4 шагам, двигатель исправен, и исследование должно быть сосредоточено на последовательности коммутации, обеспечиваемой электроникой.
Показанный драйвер представляет собой тип, которым можно управлять без какого-либо дополнительного элемента управления напрямую с помощью 4-битного слова.
Рис 4. Типичный драйверКоммутация происходит следующим образом (режим работы одна фаза ВКЛ):
Таблица 1: Коммутация при однофазном включении – типичный драйвер Эта последовательность обычно не является причиной отказа или ступенчатых потерь во время нормальной работы, когда к фазам постоянно подается ток.Это меняется при отключении питания. Выключение контроллера, который предоставляет 4 бита примера (4 бита для Phase1, Phase2, Enable1, Enable2), приведет к потере состояния счетчика, необходимого для обеспечения непрерывной пошаговой последовательности в соответствии с приведенной выше таблицей.
Поэтому при включении питания нет уверенности, что счетчик найдет положение, которое он занимал до отключения питания. Если есть разница между положением счетчика и реальным положением ротора, двигатель будет выполнять неконтролируемые шаги.Максимальная ошибка может составлять 2 шага в направлении против часовой стрелки или против часовой стрелки.
Решение
Перед отключением питания запомните 4-битное слово (больше для более сложных приводов) и перезагрузите его из памяти для инициализации счетчика. Снова включите питание в этом положении, прежде чем продолжить коммутацию.
D1. Обратное вождение
В некоторых случаях механизм / нагрузка, приводимая в действие двигателем во время движения, заводятся и возвращают эту энергию обратно в двигатель при отключении токов.Этот механизм может быть редуктором.
Поскольку механизм возвращает эту энергию обратно, вал двигателя может вращаться назад. Если это обратное движение больше, чем угол одного шага, двигатель при включении тока для следующего движения не будет развивать достаточный крутящий момент для завершения первого шага. Он может не запуститься или запуститься только после 4 полных шагов.
Он может не запуститься или запуститься только после 4 полных шагов.
Этот тип отказа также приводит к потере как минимум один цикл коммутации из 4 шагов.
Этот тип отказа может возникать только в тех случаях, когда токи двигателя значительно уменьшаются или отключаются после движения.
Решения
- Запрограммируйте коммутацию таким образом, чтобы значение и полярность токов двигателя сохранялись до их отключения. Сохраненные значения необходимо применить при повторном включении токов двигателя.
- Вместо отключения питания поддерживайте пониженный ток в режиме ожидания каждый раз, когда двигатель находится в состоянии покоя.
D2. Увеличение полезной нагрузки с течением времени
В некоторых случаях двигатель работает нормально в течение длительного периода времени, но через некоторое время теряет шаги.В этом случае вполне вероятно, что нагрузка на двигатель изменилась. Это может произойти из-за износа подшипников двигателя или внешнего события.
Решения
- Проверить наличие внешнего события: Изменился ли механизм, приводимый в действие двигателем?
- Проверьте износ подшипника: используйте шариковые подшипники вместо подшипников из спеченной муфты для увеличения срока службы двигателя.
- Убедитесь, что окружающая температура не изменилась. Его влияние на вязкость смазочного материала подшипников не является незначительным для самых маленьких двигателей.Используйте смазочные материалы, подходящие для данного рабочего диапазона. Шаговые двигатели FAULHABER можно получить с широким спектром смазочных материалов.
Шаговые двигатели
Шаговый двигатель – это особый тип бесщеточного двигателя постоянного тока. Электромагнитные катушки расположены вокруг двигателя снаружи. В центре двигателя находится железный или магнитный сердечник, прикрепленный к валу. Последовательно регулируя напряжение катушек, можно достичь точного управления вращением при относительно низких затратах.
 Недостатком является то, что управление обычно является разомкнутым, поэтому система не знает, глохнет ли двигатель или не синхронизируется с контроллером.
Недостатком является то, что управление обычно является разомкнутым, поэтому система не знает, глохнет ли двигатель или не синхронизируется с контроллером. Создавая узлы змеевиков зубчатой формы и зубчатые / зубчатые роторы, можно достичь очень большого числа шагов за один оборот от 200 до 400.
Ток и напряжения
Шаговые двигатели имеют номинальное напряжение и ток. Типичный шаговый двигатель, такой как наш NEMA 17, может иметь номинальное напряжение 2.8 Вольт и максимальный ток 1,68 Ампера. Это в основном означает, что если вы подключите его к 2,8 вольт, он будет потреблять 1,68 ампер. Если вы попытаетесь запустить его при более высоком напряжении, он будет потреблять больше тока и сильно нагреваться. Большинство людей не подключают двигатели напрямую к источнику напряжения. Они используют драйвер шагового двигателя. Драйверы шагового двигателя регулируют ток. Если вы подключите его, например, к 12 В, двигатель будет пытаться потреблять больше тока, но драйвер шагового двигателя не допустит этого и будет использовать высокочастотные импульсы для ограничения среднего тока до желаемого максимального значения.
Шаговые двигатели предназначены для работы таким образом, и их можно безопасно эксплуатировать при напряжении, в 20 раз превышающем номинальное. Вы действительно получите лучшую производительность, если будете работать при более высоком напряжении, чем номинальное.
Предупреждение
Шаговые двигатели могут безопасно работать, когда они сильно нагреваются, даже если они работают с правильными параметрами. Это не повредит двигатель, но вы также должны позаботиться о личной безопасности от ожогов или теплового повреждения вашей машины. Проверьте настройки вашего устройства и установите разумное значение тока.Шаговые двигатели потребляют энергию, даже когда они не двигаются, поэтому они, как правило, не очень энергоэффективны. Например, они были бы плохим выбором для игрушечной машинки с батарейным питанием. Двигатели всегда будут потреблять полную мощность и быстро разряжать аккумулятор. Стандартный щеточный двигатель постоянного тока не потребляет энергию, когда он не вращается, и был бы лучшим выбором.
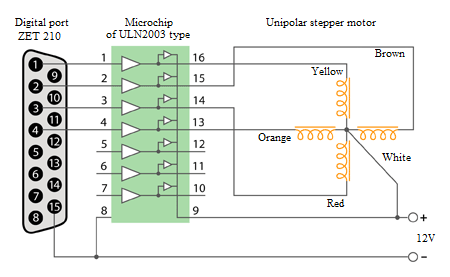
Драйверы шагового двигателя
В большинстве шаговых драйверов есть средства для установки максимального тока. Обычно это делается путем установки напряжения на управляющем контакте или с помощью потенциометра на плате.Максимальный ток шагового драйвера предполагает, что вы должным образом охлаждаете драйвер. Часто бывает сложно, даже с радиаторами, полностью охладить драйверы при максимальном значении тока. Проверяйте свою температуру во время использования машины.
Большинство драйверов имеют функцию тепловой защиты, которая на короткое время отключает драйвер, чтобы дать ему остыть. Если вы теряете шаги или слышите тикающий или пульсирующий звук двигателей, это может быть связано с тепловым отключением. Попробуйте уменьшить ток.
Если ваш драйвер рассчитан на меньший ток, чем двигатель, это нормально. Вы просто не получите полной производительности от мотора. Если драйвер рассчитан на больший ток, чем двигатель, вы должны уменьшить ток до максимального тока двигателя.
Никогда не рекомендуется отсоединять провод шагового двигателя от драйвера при включенной системе. Многие драйверы не защищены от этого и будут безвозвратно уничтожены.
Соединения и проводка двигателя.
Драйверы шаговых двигателей имеют 4-проводные соединения для двигателей, но у шаговых двигателей могут быть 4, 6 и 8-проводные версии. 6- и 8-проводные двигатели могут использоваться с 4-х клеммными драйверами с помощью специальных методов подключения. Эти методы подключения позволяют выбрать методы, которые больше подходят для электрических требований и требований к скорости вашей системы.
4-х проводные двигатели.
4-проводные двигатели подключать проще всего. Вы просто подключаете их 1: 1 к драйверу.
6-проводные двигатели
6-проводные двигатели имеют провод, прикрепленный к центру катушек. Это позволяет использовать всю катушку или только ее половину. На изображении ниже показано, как подключиться в двух режимах.
8-проводные моторы.
8-проводные двигатели имеют по две катушки на фазу. Катушки могут работать последовательно, параллельно или в режиме половинной катушки.
Если вы не знаете, какие провода к каким катушкам идут, есть несколько быстрых способов выяснить это.Первый способ – измерить сопротивление между проводами. Выбираем любые два провода. Используйте метр, чтобы определить сопротивление между ними. Сопротивление обычно меньше 10 Ом. Если вы видите сопротивление, близкое к этой величине, эти два провода принадлежат одной катушке. Если сопротивление выше, переставьте один из щупов на новый провод, пока не обнаружите низкое сопротивление.
Если у вас нет счетчика, попробуйте этот трюк. Убедитесь, что два провода не касаются друг друга, и вращайте вал.Мотор должен иметь небольшой фиксирующий момент, но вращаться относительно свободно. Теперь начните касаться пары проводов и проворачивать вал. Если поворачивать становится труднее, эти два провода находятся на одной катушке. Сопротивление возрастает, потому что вы создаете электрический генератор с высокой нагрузкой.
Если ваш двигатель вращается в обратном направлении от ожидаемого, просто поменяйте местами соединения любых двух проводов на одной катушке. Не переключайте провода от обеих катушек. Направление мотора изменится.Большинство программ или прошивок, взаимодействующих с драйверами шагового двигателя, также имеют способы изменить направление. Обычно это проще, чем менять проводку.
Размер шагового двигателя
Большинство используемых в наши дни шаговых двигателей соответствуют размерам NEMA (Национальной ассоциации производителей электротехники). Это в основном определяет размер установочной поверхности двигателя. Ниже представлена таблица самых популярных размеров. Меньшие двигатели имеют резьбовые монтажные отверстия, а большие размеры имеют резьбовые отверстия с пространством за монтажным фланцем для гайки.Валы могут иметь или не иметь плоские поверхности, доступны версии с одним или двумя валами (оба конца). Длина двигателя не покрывается спецификацией NEMA. Лицевая сторона моторов часто имеет круглую бобышку. Ваша монтажная поверхность должна быть спроектирована с учетом этого. Обязательно сверьтесь с чертежом своего мотора.
Длина двигателя не покрывается спецификацией NEMA. Лицевая сторона моторов часто имеет круглую бобышку. Ваша монтажная поверхность должна быть спроектирована с учетом этого. Обязательно сверьтесь с чертежом своего мотора. Номинальный крутящий момент шагового двигателя
Номинальный крутящий момент шагового двигателя указан как удерживающий момент. Шаговые двигатели имеют самый высокий крутящий момент в состоянии покоя или на низких скоростях, поскольку при увеличении скорости крутящий момент начинает падать.В первую очередь это связано с индуктивностью катушек. Это действует как сопротивление и ограничивает скорость, при которой катушка достигает полной силы. При высоких скоростях шага катушка не достигнет полной мощности, пока не изменится напряжение. В конце концов мощность упадет настолько, что двигатель не сможет даже вращаться. В этом помогают более высокие напряжения, поэтому вы можете получить более высокую скорость с более высокими напряжениями.
Скорость двигателя
Шаговые двигатели не имеют заданной скорости, потому что она очень зависит от приложения.Разница в нагрузке и напряжении влияет на максимальную скорость. Как было сказано выше, крутящий момент будет падать со скоростью, и в конечном итоге вы заглохнете. Водитель не узнает, что двигатель остановился, и продолжит увеличивать скорость шага. Вы услышите громкое жужжание, так как двигатель не вращается, а вибрирует. В общем, шаговые двигатели работают со скоростью только сотни оборотов в минуту, а не тысячи оборотов в минуту от обычного двигателя постоянного тока.
Точность / разрешение / микрошаг
Первичная спецификация разрешения двигателя – это количество шагов двигателя на оборот или угловых градусов на шаг.Большинство двигателей имеют 1,8 градуса на шаг (200 шагов / оборот) или 0,9 градуса на шаг (400 шагов / оборот).
Драйверы шагового двигателя также могут выполнять микрошаги.
