
Теория и расчет преобразователей, устройство плавного пуска расчет
Данный раздел посвящен теоретическим основам частотного регулирования и принципам работы устройства плавного пуска.
Принцип работы преобразователя частоты
Частотный преобразователь – устройство, позволяющее осуществлять регулирование скорости вращения электродвигателей посредством изменения частоты электрического тока.
Для понимания процесса частотного регулирования для начала необходимо вспомнить из курса электротехники принцип работы асинхронного электродвигателя.
Вращение вала электродвигателя происходит за счет магнитного поля создаваемого обмотками статора. Синхронная частота вращения магнитного поля зависит от частоты напряжения питающей сети f и выражается следующей зависимостью:
где p – число пар полюсов магнитного поля.
Под действием нагрузки частота вращения ротора электродвигателя несколько отличается от частоты вращения магнитного моля статора вследствие скольжения s:
Следовательно частота вращения ротора электродвигателя представляет собой зависимость от частоты напряжения питающей сети:
Таким образом требуемую частоту вращения вала электродвигателя np можно получить путем изменения частоты напряжения сети f. Скольжение при изменении частоты вращения не увеличивается, а соответственно потери мощности в процессе регулирования незначительны.
Скольжение при изменении частоты вращения не увеличивается, а соответственно потери мощности в процессе регулирования незначительны.
Для эффективной работы электропривода и обеспечения максимальных значений основных характеристик электродвигателя требуется вместе с частотой изменять и питающее напряжение.
Функция изменения напряжения в свою очередь зависит от характера момента нагрузки. При постоянном моменте нагрузки Mc = const напряжение на статоре должно регулироваться пропорционально частоте:
Для случаев вентиляторного режима:
При моменте нагрузки, обратно пропорциональном скорости:
Таким образом, плавное регулирование частоты обеспечивается одновременным регулированием частоты и напряжения на статоре асинхронного двигателя.
Рис 1. Схема частотного преобразователя
На рис. 1. представлена типовая блок-схема низковольтного преобразователя частоты. В нижней части рисунка для каждого блока наглядно изображены графики входных и выходных напряжений и токов.
В нижней части рисунка для каждого блока наглядно изображены графики входных и выходных напряжений и токов.
Сначала напряжение сети (UBX) поступает на вход выпрямителя (1). Далее для сглаживание выпрямленного напряжения (UВЫПР) применяется конденсаторный фильтр (2). Затем уже постоянное напряжение (Ud) подается на вход инвертора (3), где происходит преобразование тока из постоянного обратно в переменный, формируя тем самым выходной сигнал с необходимыми значениями напряжения и частоты. Для получение сигнала синусоидальной формы применяются сглаживающий фильтр (4)
Для более наглядного понимания принципа работы инвертора рассмотрим принципиальную схему частотного преобразователя на рис. 2
Рис. 2 – принципиальная схема низковольтного преобразователя частоты
В основном в инверторах применяется метод широтно-импульсной модуляции (ШИМ). Принцип данного метода заключается в попеременном включении и выключении ключей генератора, формируя импульсы различной длительности (рис.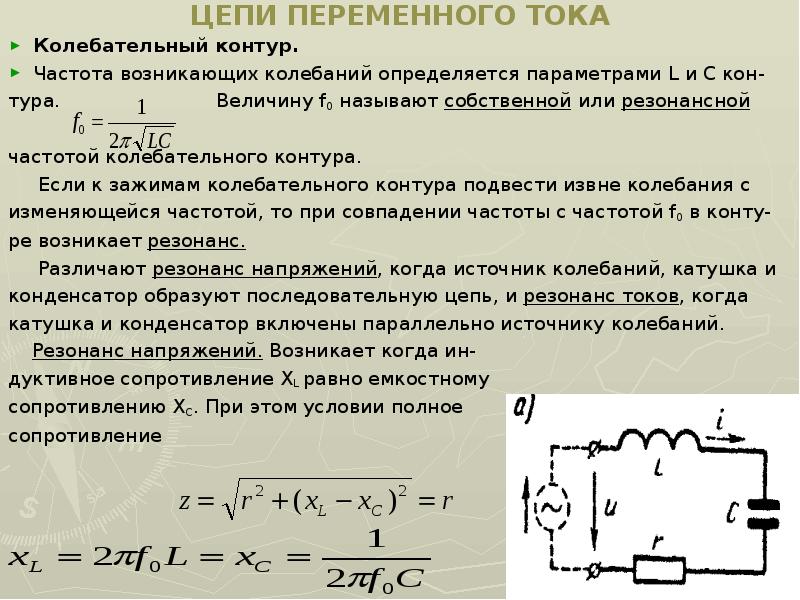 3). Синусоидальный сигнал получается за счет индуктивности двигателя или применения дополнительного сглаживающего фильтра.
3). Синусоидальный сигнал получается за счет индуктивности двигателя или применения дополнительного сглаживающего фильтра.
Рис. 3. Выходной сигнал преобразователя частоты
Таким образом, управляя процессом включения-выключения инверторных ключей, мы можем формировать выходной сигнал нужной частоты, а следовательно управлять технологическими параметрами механизма путем изменения частоты вращения привода.
Теория и принцип работы устройства плавного пуска
В связи с особенностями переходных процессов происходящих во время пуска электродвигателя токи обмоток достигают 6-8 кратной величины номинального тока электродвигателя, а вращающий момент на его валу достигает 150-200% от номинального значения. Как следствие это увеличивает риск поломки механической части двигателя, а также приводит к падению напряжения питающей сети.
Для решение данных проблем на практике применяется устройства плавного пуска электродвигателей, обеспечивающие постепенное увеличение токовой нагрузки.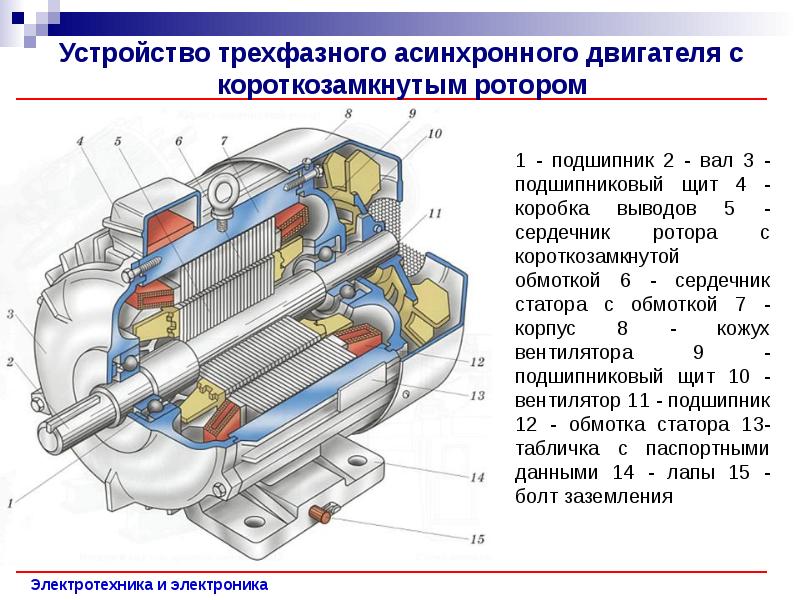
Помимо снижения токовых нагрузок мягкие пускатели позволяют: .
- Снизить нагрев обмоток двигателя;
- Снизить просадки напряжения во время пуска;
- Обеспечить торможение и последующий запуск двигателя в установленный момент времени;
- Снизить гидроудары в напорных трубопроводах при работе в составе привода насоса;
- Снизить электромагнитные помехи;
- Обеспечить комплексную защиту электродвигателя при пропадании фазы, перенапряжении, заклинивании и пр;
- Повысить надежность и долговечность системы в целом.
Принцип работы УПП
Типовая схема устройства плавного пуска представлена на рис. 1
Рис. 1. Типовая схема устройства плавного пуска
Изменением угла открытия тиристоров осуществляется регулирования выходного напряжения УПП. Чем больше угол открытия тиристора – тем больше величина выходного напряжения, питающего электродвигатель.
Рис. 2. Формирование выходного напряжения УПП
Принимая во внимание то что величина крутящего момента асинхронного электродвигателя пропорциональна квадрату напряжения, то снижение напряжения снижает величину вращающего момента вала двигателя. При помощи такого метода пусковые токи электродвигателя снижаются до величины 2…4 IНОМ, при этом время разгона несколько увеличивается. Наглядное изменение механической характеристики асинхронного электродвигателя при понижении напряжении показано на рис. 3
Рис 3. Механические характеристика двигателя
Снижение токовой нагрузки в процессе мягкого пуска электродвигателя наглядно показаны на рис. 4.
Рис. 4. Диаграмма плавного пуска асинхронного электродвигателя показана
На рис. 1. продемонстрирована типовая схема устройства плавного пуска однако стоит отметить, что реальная схема мягкого пускателя будет завесить в первую очередь от условий его эксплуатации.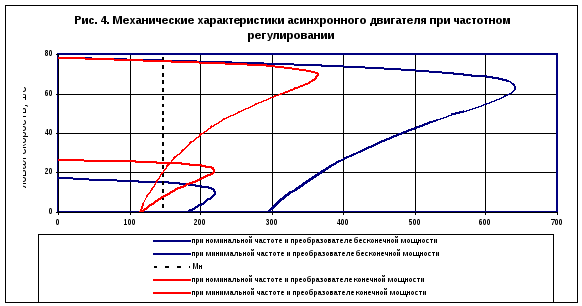 Например, для бытового бытовой инструмента и электродвигателя привода промышленной дробилки требуются различные устройства плавного пуска. Важнейшими параметрами, определяющими режимы работы устройств плавного пуска, являются время пуска и максимальное превышение по току.
Например, для бытового бытовой инструмента и электродвигателя привода промышленной дробилки требуются различные устройства плавного пуска. Важнейшими параметрами, определяющими режимы работы устройств плавного пуска, являются время пуска и максимальное превышение по току.
В зависимости от этих параметров выделяют следующие режимы работы устройств плавного пуска:
- Нормальный: пуск 10-20 секунд, ток при пуске не более 3,5 Iном.
- Тяжелый: пуск порядка 30 секунд, тока при пуске не превышает 4,5 Iном
- Сверхтяжелый: время разгона не ограничено, системы с большое инерцией, пусковой ток в диапазоне 5,5…8 Iном
Устройства плавного пуска можно разделить на следующие основные группы:
1. Регуляторы пускового момента
Данный тип устройств осуществляет контроль только одной фазы трехфазного двигателя. Контроль одной фазой дает возможность снижать пускового момент электродвигателя двигателя, но при этом снижение пускового тока происходит незначительное. Устройства данного типа не могут применяться для уменьшения токовых нагрузок в период пуска, а также для пуска высокоинерционных нагрузок. Однако они нашли применение в системах с однофазными асинхронными электродвигателями.
Устройства данного типа не могут применяться для уменьшения токовых нагрузок в период пуска, а также для пуска высокоинерционных нагрузок. Однако они нашли применение в системах с однофазными асинхронными электродвигателями.
2. Регуляторы напряжения без обратной связи
Данный тип устройств работает по следующему принципу: пользователь задает величину начального напряжения и время его нарастания до номинальной величины и наоборот. Регуляторы напряжения без обратной связи могут осуществлять контроль как двух так и трех фаз электродвигателя. Такие регуляторы обеспечивают снижение пускового тока снижением напряжения в процессе пуска.
3. Регуляторы напряжения с обратной связью
Данный тип УПП представляет собой более совершенную модель описанного выше устройств. Наличие обратной связи по позволяет управлять процессом увеличения напряжения добиваясь оптимального режима пуска электродвигателя. Данные о токовой нагрузке позволяет также организовать комплексную защиту электродвигателя от перегрузки, перекоса фаз и т. п.
п.
4. Регуляторы тока с обратной связью
Регуляторы тока с обратной связью представляют собой наиболее совершенные устройства плавного пуска. Принцип работы основан на прямом регулировании тока а не напряжения. Это позволяет добиться наиболее точное управление пуском электродвигателя, а также облегчает настройку и программирование УПП.
Принцип работы частотного преобразователя и критерии выбора
Неотъемлемой частью конструкций современных электродвигателей являются частотные преобразователи. Эти устройства позволяют получать «на выходе» частоту переменного тока, соответствующую заданному диапазону.
Преобразователи востребованы во всех сферах жизнедеятельности, связанных с электрической энергией. Результатом их действия становится стабильная работа сложных приводных механизмов без задействования традиционной регулирующей аппаратуры с минимизацией энергопотребления. При использовании таких устройств значительно повышается КПД используемого оборудования.
Сферы применения и преимущества использования
Рассматриваемые устройства обеспечивают плавное регулирование скорости электродвигателей. Этим и определяются области их использования, а именно:
- Вентиляционные системы.
- Приводные механизмы.
- Компрессоры.
- Дымососы.
- Конвейеры.
- Грузоподъемное оборудование.
- Деревообрабатывающее оборудование.
Современные модели отличаются расширенным перечнем функциональных возможностей. Это сохранение работоспособного состояния при нестабильном питании, исключение резонансных частот (продление срока эксплуатации), оптимальная работа в системе автоматического управления и возможность проведения идентификационного пуска, позволяющего настроить устройство под параметры обмоток вращающегося двигателя.
Подключение и настройка преобразователя частоты позволяет не только сгладить работу электродвигателя при его запуске и торможении, но и управлять целой группой двигателей (создание систем). Они значительно упрощают управление с повышением его надежности. Еще одно преимущество преобразователей – это возможность корректировки настроек в процессе работы.
Они значительно упрощают управление с повышением его надежности. Еще одно преимущество преобразователей – это возможность корректировки настроек в процессе работы.
Типы управления – особенности, достоинства
Существует два основных принципа управления частотных преобразователей для электродвигателей применимые во всех областях их использования, это:
- Скалярное. Оптимальный вариант для реализации управления более простыми механизмами. Выходное напряжение и выходная частота поддерживаются в постоянном соотношении (неизменно отношение максимального момента двигателя к текущему моменту нагрузки) – перегрузочная способность электродвигателя. Диапазон регулирования 1 : 40.
- Векторное. Осуществление контроля над тремя параметрами: выходное напряжение, выходная частота, фаза. Регулирование скорости и момента на валу электродвигателя производится независимо на основе данных величины и угла пространственного вектора. Работа при частотах близких к нулю.
 Диапазон регулирования 1 : 1000 (гарантированная высокая точность).
Диапазон регулирования 1 : 1000 (гарантированная высокая точность).
Многофункциональность таких устройств значительно облегчает многие процессы. Лучше всего выбрать частотный преобразователь со встроенным логическим контроллером и возможностью подключения дополнительной платы для расширения входов/выходов.
Принцип работы устройства
В основе работы данного устройства лежит принцип двойного преобразования напряжения, подающегося на вход. Конструкция представлена силовым механизмом на базе тиристоров/транзисторов и управляющего механизма (микропроцессор).
Обязательно последовательное исполнение 3 этапов:
- Выпрямление с помощью диодного блока.
- Фильтрация через конденсаторы.
- Инвертирование. Изменение характеристик тока с целью его преобразования из постоянного в переменный, и последующей возможности регулирования скорости вращения ротора двигателя.
В процессе преобразования принимает участие и сам двигатель, его индуктивность также влияет на кривую (сглаживание).
Схема подключения частотного преобразователя
Как сделать правильный выбор?
Современный рынок электротехнических устройств отличается широким ассортиментом, что значительно усложняет процесс подбора необходимого оборудования. В процессе приобретения обязательно учитываются следующие критерии:
- Мощность. При расчете учитывается мощность двигателя и его перегрузочная способность. Предпочтение отдается моделям с наиболее широким диапазоном мощностей.
- Функциональность.
- Напряжение питающей сети. Два варианта: однофазная сеть 220-240 В и промышленная сеть 380 В.
- Система охлаждения. Воздушное (радиаторы на поверхности задней стенки) или жидкостное охлаждение.
- Тип двигателя (синхронный/асинхронный, низковольтный/высоковольтный).
- Способ управления (пульт, входы управления, контроллер, ПК).
- Безопасность и защита (система ограничения тока при пуске, продолжительной работе/остановке, защита от перепадов напряжения и перегрева).

Каждый параметр определяется в индивидуальном порядке. Внимание обращается и на габаритные размеры устройства, а также материал его изготовления и герметичность корпуса. Частотные преобразователи в каталоге нашей компании представлены по максимально выгодным ценам.
Мы предлагаем своим клиентам качественную продукцию от ведущих производителей. Для того чтобы получить профессиональную консультацию и заказать промышленную технику звоните по телефонам: +375 (17) 513-99-91 или +375 (17) 513-99-93. Наши специалисты ответят на все вопросы и помогут сделать правильный выбор!
Вопросы и ответы
Подключение датчика АДМ-100 для ER-T:
клемму “+” АДМ соедините с клеммой “Р24” ПЧ;
клемму “-” АДМ соедините с клеммой “FI” ПЧ.
Настройки для ER-T:
b.02=4 //Способ задания частоты – ПИД-регулятор
b.04=60.0 //Время разгона
b.05=60.0 //Время торможения
С. 01=1 //уставка ПИД по параметру С.05
01=1 //уставка ПИД по параметру С.05
С.02=1 //ОС ПИД по входу FI
С.04=16.0 //предел измерения датчика АДМ-100-1,6 в кгс/см2
С.05=14.0 //уставка в кгс/см2
С.09 и С.10 подлежат корректировке при ПНР для обеспечения качества регулирования давления
Перед настройкой ПИД-регулятора рекомендуется выполнить пуск в ручном режиме. При открытом расходе насоса проверьте его работу, вручную задавая частоту от 15 до 50 Гц с панели ПЧ. Если насос не выходит на макс. частоту 50Гц, выберите тип модуляции b.10=OPt, выберите d.01 равным ном. току ПЧ и увеличьте номинальное напряжение d.02 до 400…420В.
Подключение датчика АДМ-100 для E-9:
клемму “+” АДМ соедините с клеммой “Р24” ПЧ;
клемму “-” АДМ соедините с клеммой “IFA” ПЧ;
установите перемычку между клеммами “GND” и “COM” ПЧ.
Настройки для E-9:
F194=3, F193=1, F003=0, F004=2, F110=0, F111=4, F113=2
F114=пределу измерения АДМ-100 (для АДМ-100.3-1,6 установите F114=16,0 кгс/см2 )
F116=70,0 (к-т пропорциональности, требует подстройки для улучшения качества регулирования)
F117=8,0 (время интегрирования, требует подстройки для улучшения качества регулирования)
F119=0, F120=100
Задание давления производится потенциометром на панели управления ПЧ.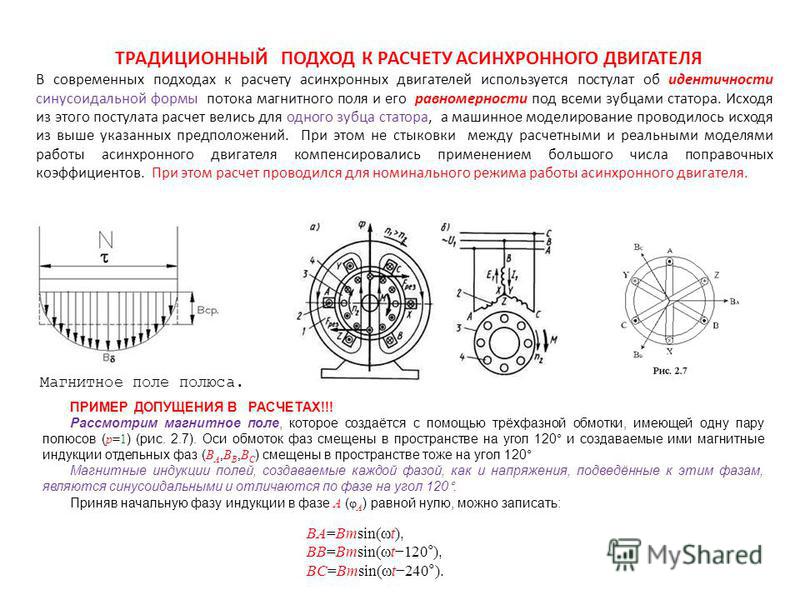 Кнопками SET и ESC переключаются отображаемые параметры на верхнем и нижнем табло панели соответственно. При мигающем индикаторе MPa отображается заданное давление, при горящем постоянно индикаторе MPa отображается давление, полученное от датчика.
Кнопками SET и ESC переключаются отображаемые параметры на верхнем и нижнем табло панели соответственно. При мигающем индикаторе MPa отображается заданное давление, при горящем постоянно индикаторе MPa отображается давление, полученное от датчика.
При длине кабеля более 30 м, например, в случае с погружным насосом, на выходе ПЧ необходимо установить моторный дроссель серии EA-OC с номинальным током соответственно току двигателя.
Расчет характеристик трехфазного асинхронного двигателя
В электроприводе производственного агрегата используется асинхронный двигатель трехфазного тока с короткозамкнутым ротором. Двигатель работает в номинальном режиме при линейном напряжении Uл = 380 В и при промышленной частоте f = 50 Гц.
Используя данные электродвигателя, выбрать сечение питающих проводов и номинальный ток плавких вставок предохранителей. Построить график зависимости вращающего момента от скольжения М = f(s), предварительно вычислив номинальное и максимальное значения момента, пусковой момент, а также значения вращающего момента при скольжении, равном 0,2; 0,4; и 0,6. Смотреть видео: асинхронный двигатель Исходные данные:
Смотреть видео: асинхронный двигатель Исходные данные:
Iпуск/Iном = 6,5; Ммакс/Мно = 2,0; КПДном = 0,82; сosjном = 0,83;
Тип двигателя – 4А80А2У3; Рном = 1,5 кВТ; Sном = 7,0 %.
Решение Заказать у нас работу!
- Определим номинальный ток двигателя:
По найденному значению тока из табл. Приложения 2 выбираем сечение питающего провода для двигателя. При номинальном токе 3,35 А подойдут провода сечением 2,5 кв. мм трехжильные медные с резиновой или полихлорвиниловой изоляцией или трехжильные алюминиевые провода с резиновой или полихлорвиниловой изоляцией.
- Определим величину пускового тока из известного по условию задачи соотношения Iпуск/Iном = 6,5:
- Определим номинальный ток плавкой вставки:
Если принять, что двигатель работает с тяжелыми условиями пуска (большая длительность разгона, частые пуски):
Из ряда стандартных плавких вставок на номинальные токи 6, 10, 15, 20, 25, 30, 50, 60, 80, 100, 120, 150 А выбираем вставку на номинальный ток 15 А.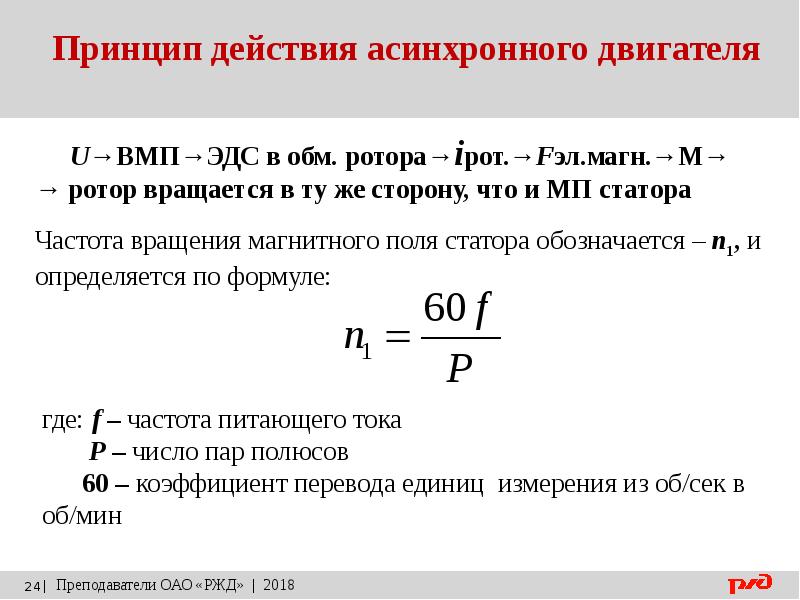
В обозначении двигателя (4А80А2У3) после буквы “А” указано количество полюсов, количество пар полюсов вдвое меньше, т.е. в данном случае Р = 1.
- Определим частоту вращения ротора двигателя:
- Определим вращающий момент при номинальном режиме работы:
- Из заданной по условию задачи перегрузочной способности двигателя (Ммакс/Мно = 2,0) определим максимальный вращающий момент:
- Определим величину скольжения, при которой момент наибольший:
Из двух полученных значений по условию устойчивой работы двигателя выбираем .
- Определим пусковой момент двигателя (при S = 1):
- Определим момент при S = 0,2:
- Момент при S = 0,4:
- Момент при S = 0,6:
- Построим график зависимости вращающего момента от скольжения:
Заказать у нас работу!
Формулы расчета резонансной частоты колебательного контура
Что такое колебательный контур
Колебательный контур это несколько элементов в любой электрической цепи, емкость и индуктивность, которых соединены параллельно или последовательно. Для нормального функционирования колебательного контура в цепи необходим источник энергии.
Для нормального функционирования колебательного контура в цепи необходим источник энергии.
Параллельный контур колебаний
При параллельном или последовательном соединениях элементов, входящих в состав электрической цепи, та или иная замкнутая проводниковая система получает одноимённое название. Явление резонанса в обоих случаях, возникает аналогичным образом, только в случае параллельного колебательного контура этот показатель относится к силе тока, а в случае с последовательным – возникает предельная частотность мгновенного изменения напряжений.
Свободные электрические колебания в параллельном контуре.
Основные свойства индуктивности:
— Ток, протекающий в катушке индуктивности, создаёт магнитное поле с энергией . — Изменение тока в катушке вызывает изменение магнитного потока в её витках, создавая в них ЭДС, препятствующую изменению тока и магнитного потока.
Период свободных колебаний контура LC
можно описать следующим образом:
Если конденсатор ёмкостью C
заряжен до напряжения
U
, потенциальная энергия его заряда составит. Если параллельно заряженному конденсатору подключить катушку индуктивности
Если параллельно заряженному конденсатору подключить катушку индуктивности
L
, в цепи пойдёт ток его разряда, создавая магнитное поле в катушке.
Магнитный поток, увеличиваясь от нуля, создаст ЭДС в направлении противоположном току в катушке, что будет препятствовать нарастанию тока в цепи, поэтому конденсатор разрядится не мгновенно, а через время t
1, которое определяется индуктивностью катушки и ёмкостью конденсатора из расчёта
t
1 = . По истечении времени
t
1, когда конденсатор разрядится до нуля, ток в катушке и магнитная энергия будут максимальны. Накопленная катушкой магнитная энергия в этот момент составит. В идеальном рассмотрении, при полном отсутствии потерь в контуре,
EC
будет равна
EL
. Таким образом, электрическая энергия конденсатора перейдёт в магнитную энергию катушки.
Как работает контур колебаний
Работа контура колебаний основана на циклическом преобразовании энергии индуктивности в качественный показатель эффективности конденсатора и наоборот. Допустим, что конденсатор полностью заряжен и энергия, запасенная в нем, максимальна. При подключении его к катушке индуктивности, он начинает разряжаться. При этом, через индуктивность начинает протекать ток, вызывающий появление ЭДС самоиндукции, направленную на уменьшение протекающего тока. Это означает, что начинается процесс перезарядки конденсатора. В тот момент, когда энергия прибора становится равной нулю, та же величина для катушки максимальна.
Допустим, что конденсатор полностью заряжен и энергия, запасенная в нем, максимальна. При подключении его к катушке индуктивности, он начинает разряжаться. При этом, через индуктивность начинает протекать ток, вызывающий появление ЭДС самоиндукции, направленную на уменьшение протекающего тока. Это означает, что начинается процесс перезарядки конденсатора. В тот момент, когда энергия прибора становится равной нулю, та же величина для катушки максимальна.
Далее, энергия индуктивности снижается, расходуясь на заряд емкости с противоположной полярностью. После уменьшения показателя коэффициента самоиндукции до нуля, на конденсаторе она опять имеет максимальное значение.
Вам это будет интересно Как вычислить сопротивление проводника
Процессы в системе
Важно! В идеальном случае, данный процесс способен протекать бесконечно. В реальных устройствах колебание затухает со скоростью, пропорциональной потерям в цепи проводников.
Вне зависимости от величины энергии, наличия потерь, частота колебаний постоянна и зависит только от значений параметров коэффициента самоиндукции и емкости. Данная величина называется резонансной. Формула резонанса учитывает значение величины емкости и индуктивности контура колебаний.
Данная величина называется резонансной. Формула резонанса учитывает значение величины емкости и индуктивности контура колебаний.
Осциллограмма
При воздействии на электрическую цепь с катушкой внешним сигналом с частотой, равной резонансной, амплитуда изменения положения частиц резко возрастает. Резонанс отсутствует при несовпадении частот. Из-за предельных значений электрическую цепь с катушкой индуктивности часто называют резонансной.
Потери в цепи с катушкой индуктивности (потери в диэлектрике конденсатора, сопротивление самого устройства, соединительных проводов) ограничивают величину предельных изменений направления частиц. В следствие этого, введена характеристика электроцепи, именуемая добротностью. Добротность обратно пропорциональна предельной величине потерь.
Зависимость предельной частоты от добротности
Важно! Снижение добротности приводит к тому, что предел изменения направлений наступает не только на основной частоте, но и на некотором приближении к ней, то есть, в некоторой полосе частот, где резонансное значение находится посередине. Чем выше добротность, тем более узкой становится полоса частот.
Чем выше добротность, тем более узкой становится полоса частот.
Амплитуда резонанса
Чтобы найти величину амплитуды в резонансном случае, нужно подставить формулу (1) в формулу отклонения при вынужденных колебаниях.
Если
| Ymax.рез | резонансная амплитуда колебаний системы, | метр |
| Fmax.возм | максимальное значение возмущающей силы, | Ньютон |
| m | масса колебательной системы, | кг |
| ωрез | резонансная частота, при которой амплитуда максимальна, | радиан/сек |
| ω0 | частота собственных незатухающих колебаний системы, | радиан/сек |
| ω | частота колебаний системы с затуханием, | радиан/сек |
| β | коэффициентом вязкого трения, | кг/сек |
| δ | коэффициентом затухания, | радиан/сек |
то имеем
\[ Y_m = \frac[-2.65] { F_{max.возм} } { β \sqrt[-1. 2} } } \]
2} } } \]
\[ Y_m = \frac{F_{max.возм}}{βω} \]
\[ Y_m = \frac{F_{max.возм}}{2δmω} \]
Согласно формуле, разность фаз α
также зависит от частоты возмущающей силы. Параметром служит коэффициент
δ
.
На рисунке представлена зависимость α
от частоты.
Независимо от величины затухания при ω = ω0
разность фаз составляет
\[ α = 90° \]
Резонанс играет большую роль в технике и в повседневной жизни. В большинстве механических устройств под действием внешних периодических сил могут возникать колебания. При резонансе происходит нарастание амплитуды колебаний, и это может привести к разрушениям («резонансная катастрофа»). В случае вращательного движения резонансную частоту называют критическим числом оборотов.
Чтобы предотвратить возникновение колебаний со слишком большой амплитудой следует: — по возможности устранять периодически действующие силы, — добиваться большой разности собственной частоты и частоты возбуждающей силы, — добиваться того, чтобы частота принимала резонансное значение лишь на время, меньшее одного периода колебаний, — применять демпфирующие элементы.
Формула индуктивности
Расчет резонанса колебательного контура производится на основании значений емкости и индуктивности. Как правило, емкость конденсатора является постоянной величиной, за исключением случаев использования переменных устройств в перестраиваемых электроцепях. Коэффициент самоиндукции катушки зависит от многих факторов:
- Количество и расположение витков обмотки;
- Наличие или отсутствие сердечника;
- Материал сердечника.
Общей формулы для определения индуктивности катушки колебательного контура не существует. Для расчетов используют формулы, соответствующие форме катушки. К сожалению, все формулы определения качественной величины электрической цепи с подсоединённой к ней катушкой индуктивности позволяют производить только приблизительные расчеты.
Вам это будет интересно Формулы электрического тока
Приборы индуктивности различных типов
Важно! Для того, чтобы получить катушку с заданными параметрами, приходится принимать дополнительные меры, например, производить подстройку коэффициента самоиндукции путем изменения длины сердечника или корректировки расстояния между витками в однорядных катушках.
Резонансная частота. Расстройка
Знаете ли Вы,
что такое мысленный эксперимент, gedanken experiment? Это несуществующая практика, потусторонний опыт, воображение того, чего нет на самом деле. Мысленные эксперименты подобны снам наяву. Они рождают чудовищ. В отличие от физического эксперимента, который является опытной проверкой гипотез, «мысленный эксперимент» фокуснически подменяет экспериментальную проверку желаемыми, не проверенными на практике выводами, манипулируя логикообразными построениями, реально нарушающими саму логику путем использования недоказанных посылок в качестве доказанных, то есть путем подмены. Таким образом, основной задачей заявителей «мысленных экспериментов» является обман слушателя или читателя путем замены настоящего физического эксперимента его «куклой» — фиктивными рассуждениями под честное слово без самой физической проверки. Заполнение физики воображаемыми, «мысленными экспериментами» привело к возникновению абсурдной сюрреалистической, спутанно-запутанной картины мира.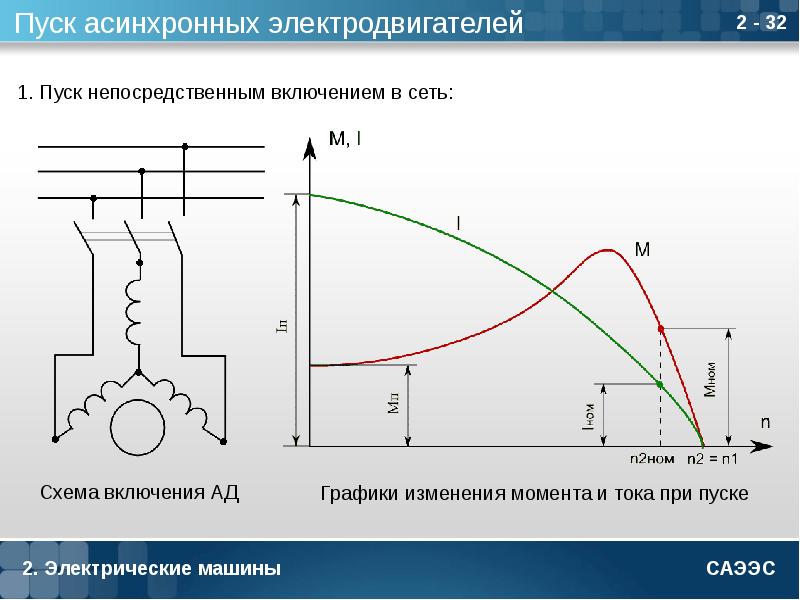 Настоящий исследователь должен отличать такие «фантики» от настоящих ценностей. Релятивисты и позитивисты утверждают, что «мысленный эксперимент» весьма полезный интрумент для проверки теорий (также возникающих в нашем уме) на непротиворечивость. В этом они обманывают людей, так как любая проверка может осуществляться только независимым от объекта проверки источником. Сам заявитель гипотезы не может быть проверкой своего же заявления, так как причина самого этого заявления есть отсутствие видимых для заявителя противоречий в заявлении.
Настоящий исследователь должен отличать такие «фантики» от настоящих ценностей. Релятивисты и позитивисты утверждают, что «мысленный эксперимент» весьма полезный интрумент для проверки теорий (также возникающих в нашем уме) на непротиворечивость. В этом они обманывают людей, так как любая проверка может осуществляться только независимым от объекта проверки источником. Сам заявитель гипотезы не может быть проверкой своего же заявления, так как причина самого этого заявления есть отсутствие видимых для заявителя противоречий в заявлении.
Это мы видим на примере СТО и ОТО, превратившихся в своеобразный вид религии, управляющей наукой и общественным мнением. Никакое количество фактов, противоречащих им, не может преодолеть формулу Эйнштейна: «Если факт не соответствует теории — измените факт» (В другом варианте » — Факт не соответствует теории? — Тем хуже для факта»).
Максимально, на что может претендовать «мысленный эксперимент» — это только на внутреннюю непротиворечивость гипотезы в рамках собственной, часто отнюдь не истинной логики заявителя. Соответсвие практике это не проверяет. Настоящая проверка может состояться только в действительном физическом эксперименте.
Соответсвие практике это не проверяет. Настоящая проверка может состояться только в действительном физическом эксперименте.
Эксперимент на то и эксперимент, что он есть не изощрение мысли, а проверка мысли. Непротиворечивая внутри себя мысль не может сама себя проверить. Это доказано Куртом Гёделем.
Понятие «мысленный эксперимент» придумано специально спекулянтами — релятивистами для шулерской подмены реальной проверки мысли на практике (эксперимента) своим «честным словом». Подробнее читайте в FAQ по эфирной физике.
Как правильно рассчитать частоту контура колебаний
Для последовательного колебательного контура добротность растет с увеличением значения индуктивности. Таким образом, при расчетах элементов, следует учитывать величину добротности. Также, необходимо иметь в виду, что емкости конденсаторов выбираются из стандартного ряда значений, и на этом основании изготавливается катушка индуктивности.
Явление резонанса позволяет использовать колебательные контуры в качестве частотно зависимых цепей и в элементах фильтров. Радиоприемные устройства наиболее широко используют избирательные свойства колебательных систем. Если вместо емкости использовать кварцевый резонатор, то можно получить электрическую цепь с катушкой индуктивности, обладающей очень высокой добротностью. Такие схемы широко используются в задающих генераторах, где требуется высокая точность для определения периода изменения направления частиц.
Радиоприемные устройства наиболее широко используют избирательные свойства колебательных систем. Если вместо емкости использовать кварцевый резонатор, то можно получить электрическую цепь с катушкой индуктивности, обладающей очень высокой добротностью. Такие схемы широко используются в задающих генераторах, где требуется высокая точность для определения периода изменения направления частиц.
Общие сведения
Колебательным контуром называется электрическая цепь, состоящая из конденсатора и катушки индуктивности, применяемой для генерации свободных электромагнитных колебаний в радиоприемниках и радиопередатчиках. Это устройство используется в качестве различных фильтров (полосовых и режекторных). Для подстройки сигналов в сторону увеличения или уменьшения амплитуды используется этот радиоэлемент. Основная функция контура — фильтрация частот.
Широкое распространение устройство получило в военной сфере. В радиолокационных станциях применяются фильтры шумоподавления. Противник использует различные постановщики помех, блокирующие обнаружение цели. В состав техники входит специальное устройство, состоящее из обыкновенных контуров, но с сердечником из специального сплава. Помехи «фильтруются», и оператор радиолокационной станции получает полную картину воздушной обстановки.
Устройство можно применять и для автоматизации. Например, в состав самолетов включен блок для регулировки частоты. Основными его элементами являются два контура, которые настроены только на две частоты — 760 и 840 Гц. На них приходит напряжение с частотой 790 Гц от специального генератора. Последний издает всего 395 Гц. Если частота отклоняется от номинального значения в меньшую сторону, то реактивное сопротивление одного из контуров уменьшается.
После этого активируется электроника блока, и выдается сигнал на увеличение оборотов генератора. Когда величина частоты превышает номинальное значение, реактивное сопротивление другого контура увеличивается. В результате этого срабатывает автоматика, и поступает другой тип сигнала на уменьшение оборотов генератора.
https://youtu.be/fs45w0k52rw
Проблемы резонанса двигателя и приводной системы и решения
Насосы и системы, ноябрь 2008 г.
Механический резонанс возникает, когда внешний источник усиливает уровень вибрации массы или конструкции на собственной частоте. Для вращающейся массы, такой как двигатель или насос, это происходит при критической скорости (ах). Электрический резонанс увеличивает величину напряжения или тока, или и того, и другого.
Увеличение амплитуды, будь то механическое или электрическое, вызывает большую нагрузку на компоненты двигателя и насоса, отрицательно влияет на работу (например,g., повышенная вибрация, нестабильность и потребление энергии) и приводит к преждевременному выходу из строя.
При питании от внешнего источника энергии резонанс может продолжать увеличиваться по величине, пока не произойдет сбой. Механический резонанс может привести к поломке компонентов двигателя, привода и насоса; электрический резонанс может вызвать выход из строя обмоток двигателя. В этой статье обсуждаются оба типа резонанса и предлагаются решения для каждого из них.
В этой статье обсуждаются оба типа резонанса и предлагаются решения для каждого из них.
Резонанс механической системы
Двигатель и нагрузка, такая как насос, составляют «двухмассовую систему» и обычно соединяются устройствами передачи энергии, такими как редукторы, ремни и муфты.Как показано на рисунке 1, каждый из этих соединительных компонентов слегка скручивается, как пружина, когда двигатель прикладывает крутящий момент. Резонанс механической системы, который может возникнуть, если какие-либо собственные частоты находятся в пределах диапазона скоростей, обычно вызван податливостью («упругостью» или отсутствием жесткости) между двигателем и его нагрузкой. Свидетельством проблемы является повышенная вибрация на собственной частоте. Двигатель также может издавать чистый звук, как у камертона, начать «рычать» или стать нестабильным.
Каждая двухмассовая система имеет по крайней мере одну частоту, на которой она хочет колебаться, а именно ее механическую резонансную частоту. В преобразователе частоты (VFD) и двигателе возможны множественные резонансные (собственные) частоты.
В преобразователе частоты (VFD) и двигателе возможны множественные резонансные (собственные) частоты.
Решения для механического резонанса
Если проблема связана только с одной резонансной частотой, хорошим решением будет усилить «пружины» системы (рис. 1), чтобы повысить ее резонансную частоту. Этого можно добиться, используя менее совместимые компоненты: e.g., замена винтовых муфт более жесткими «сильфонными» муфтами или замена более коротких и толстых валов на более длинные и тонкие. Для придания жесткости ременным приводам используйте более широкие или короткие ремни, ремни со стальной лентой или параллельные (составные) ремни. Установка более жестких редукторов и усиление рамы или основания машины также может помочь уменьшить проблемы механического резонанса.
ЧРП. Как упоминалось ранее, VFD и двигатели могут иметь несколько резонансных частот. Решением проблем механического резонанса в большинстве этих случаев является программирование частотно-регулируемого привода на «пропуск» вызывающих проблемы резонансных частот, что предотвращает работу двигателя в диапазонах скоростей, связанных с резонансом или вибрацией.
Инерция между нагрузкой и двигателем. Еще один способ решить проблемы механического резонанса – уменьшить отношение инерции нагрузки к двигателю. Например, если двигатель физически намного меньше насоса, которым он управляет, им будет труднее управлять, чем двигателем большего размера, и он будет более подвержен механическому резонансу. Использование двигателя с большим физическим размером улучшит отношение инерции нагрузки к двигателю и, следовательно, уменьшит проблемы резонанса. Конечно, такое решение может оказаться непрактичным, потому что может потребовать значительных изменений электрических и механических систем.
Модификация моторной базы. Модификация моторной базы – еще один способ уменьшить механический резонанс системы. Производитель двигателя обычно может предоставить информацию, необходимую для расчета резонансной частоты системы установленного двигателя: вес двигателя, центр тяжести и статическое отклонение. Основания в типичных установках не являются действительно жесткими, поэтому фактическая резонансная частота системы, вероятно, будет ниже, чем показывают расчеты. Если эта частота равна или близка к рабочей скорости, может потребоваться изменить резонансную (герконовую) частоту двигателя, чтобы предотвратить огромное увеличение амплитуды вибрации.
Основания в типичных установках не являются действительно жесткими, поэтому фактическая резонансная частота системы, вероятно, будет ниже, чем показывают расчеты. Если эта частота равна или близка к рабочей скорости, может потребоваться изменить резонансную (герконовую) частоту двигателя, чтобы предотвратить огромное увеличение амплитуды вибрации.
Распространенные способы достижения этого включают изменение жесткости основания, изменение веса комбинации двигатель / основание или изменение (обычно снижение) центра тяжести (см. Рисунок 2). (Примечание: в двигателях с подшипниками скольжения критическая скорость язычка от 40 до 50 процентов рабочей скорости может вызвать вибрацию из-за масляного выброса или масляного вихря.)
Резонанс электрической системы
В дополнение к возбуждению механического резонанса также возможен резонанс энергосистемы, часто связанный с наличием гармоник.
Электроэнергия, поставляемая электросетью, обычно представляет собой чистую синусоиду на основной частоте, обычно 50 или 60 Гц. Однако подключение нелинейных нагрузок к энергосистеме может вызвать нежелательные частотные составляющие, называемые гармониками, кратными основной частоте. Например, типичный ЧРП создает эти нежелательные компоненты на пятой гармонике (в пять раз больше основной частоты), а также на седьмой, 11-й, 13-й и т. Д.Примеры нелинейных нагрузок включают персональные компьютеры, источники бесперебойного питания (ИБП) и приводы двигателей постоянного тока.
Добавление гармоник к основной частоте дает искаженную несинусоидальную форму волны. В зависимости от уровня гармонических искажений вредные последствия могут варьироваться от ложных отключений и незначительных неисправностей до повреждения двигателей и насосов и продолжительных простоев. Гармоники также увеличивают потери в энергосистеме и электрооборудовании.
В двигателях высшие гармонические составляющие создают дополнительную электрическую нагрузку на обмотки, увеличивают нагрев ротора и сокращают срок службы двигателя.Потенциально наиболее вредным эффектом гармоник является то, что они могут вызвать резонанс системы, который повредит двигатели и насосы или даже вызовет отказ системы. Гармоники также могут вызывать неправильные показания счетчика, выход из строя подшипников двигателя (из-за электрических токов), перегорание предохранителей в системах с коррекцией коэффициента мощности и помехи при телефонной связи. Многие из этих проблем могут остаться незамеченными, пока неисправное оборудование не выйдет из строя.
Когда частотно-регулируемый привод или другое нелинейное устройство подает гармонический ток на резонансной частоте, система становится возбужденной или нестабильной.Вариант закона Ома (V = IZ) применяется для резонанса системы. Когда I (ампер) и Z (импеданс) одновременно высокие, V (напряжение) становится исключительно высоким. Это вызывает чрезмерный нагрев или, возможно, немедленное повреждение диэлектрика в конденсаторах, трансформаторах или других устройствах.
Это вызывает чрезмерный нагрев или, возможно, немедленное повреждение диэлектрика в конденсаторах, трансформаторах или других устройствах.
Другая проблема заключается в том, что большинство производителей частотно-регулируемых приводов указывают максимальную длину кабеля между их оборудованием и двигателем. Эта спецификация зависит от производителя и привода, но обычно составляет от 50 до 250 футов (от 15 до 75 м).Поскольку это ограничение может сделать приложение трудным, непрактичным или даже невозможным, многие пользователи VFD игнорируют его, что приводит к большему количеству отказов электродвигателей и простоям.
Если резонансная частота выводных проводов попадает в частотный диапазон формы волны напряжения частотно-регулируемого привода, сами проводники входят в резонанс. Это усилит компоненты напряжения на (или около) собственной резонансной частоте проводников, вызывая скачки напряжения, которые могут превышать 2. В 5 раз больше напряжения шины постоянного тока инверторной секции частотно-регулируемого привода.
В 5 раз больше напряжения шины постоянного тока инверторной секции частотно-регулируемого привода.
Решения для резонанса и гармоник электрических систем
Очевидное решение для предотвращения скачков напряжения в системах с частотно-регулируемым приводом состоит в том, чтобы сохранить длину провода между двигателем и приводом в пределах спецификаций производителя привода. Как упоминалось ранее, VFD также могут быть запрограммированы на «пропуск» проблемных частот.
Обычно доступные решения для уменьшения гармоник включают сетевые дроссели, изолирующие трансформаторы, фильтры и частотно-регулируемые приводы с более высокими импульсами (например,г., 12- или 18-пульсный). Внимательно рассмотрите все сильные и слабые стороны, чтобы определить, что лучше всего подходит для конкретной установки.
Самый простой и распространенный способ уменьшить гармоники – это добавить к системе импеданс. Это решение обеспечивает максимальное снижение общих гармонических искажений по сравнению с ценой. Фактически, увеличение импеданса всего на 3 процента уменьшит гармоники тока примерно на 50 процентов в стандартном 6-импульсном частотно-регулируемом приводе. Это решение часто достигается в частотно-регулируемом приводе путем установки дросселя постоянного тока или входного линейного реактора, изолирующего трансформатора или их комбинации.
Фактически, увеличение импеданса всего на 3 процента уменьшит гармоники тока примерно на 50 процентов в стандартном 6-импульсном частотно-регулируемом приводе. Это решение часто достигается в частотно-регулируемом приводе путем установки дросселя постоянного тока или входного линейного реактора, изолирующего трансформатора или их комбинации.
Реакторы линейные. Сетевые реакторы обеспечивают полное сопротивление для уменьшения гармонического тока, но они меньше по размеру и обычно стоят меньше, чем изолирующие трансформаторы. Также называемые индукторами, они доступны в стандартных диапазонах импеданса 1,5, 3, 5 и 7,5% от импеданса нагрузки.
Применение сетевого дросселя на выводах привода может помочь снизить резонансную частоту всей цепи, но дополнительные потери в меди и сердечнике индуктора увеличивают общее демпфирование цепи.Хотя это снижает пик напряжения перегрузки (скачки напряжения), он также увеличивает его продолжительность, что по-прежнему приводит к дополнительной нагрузке на обмотки двигателя.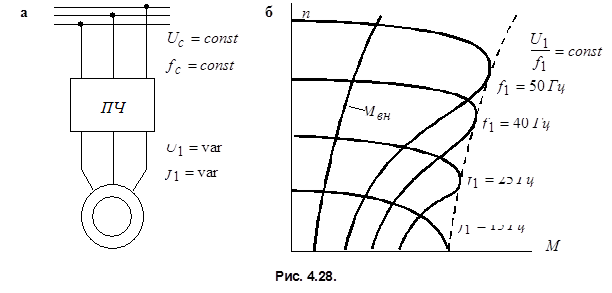
Изолирующие трансформаторы. Изолирующий трансформатор дает несколько преимуществ. Прежде всего, он обеспечивает сопротивление приводу, что снижает искажения тока. Правильно подобранный, его можно использовать для согласования напряжения питания с номинальным напряжением нагрузки. Если вторичная обмотка заземлена, она также изолирует замыкания на землю и снижает синфазный шум (электрический шум, который возникает одновременно на всех проводниках электрической цепи).
Фильтры гармоник. Также могут быть установлены фильтры гармоник, иногда в сочетании с реакторами и резисторами, для уменьшения содержания гармоник в энергосистеме. В своей простейшей форме комбинация конденсатор-индуктор «улавливает» или отфильтровывает гармонический ток одной частоты. Доступны фильтры нижних частот с конденсаторами, катушками индуктивности и резисторами, которые позволяют «проходить» через них только низким частотам.
Применение настроенного фильтра нижних частот на выводах инвертора может удалить все напряжения несущей частоты ЧРП.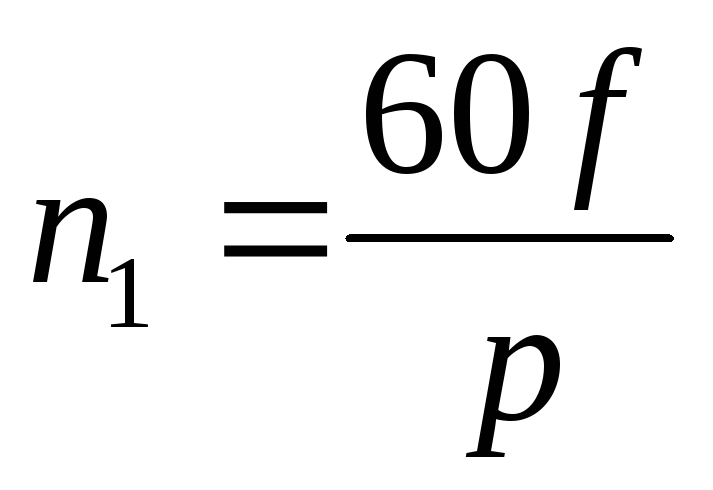 Эти специализированные фильтры для конкретных приложений изначально были разработаны для ограничения слышимого шума двигателя. Хотя этот подход удаляет все частоты частотно-регулируемого привода выше основной гармоники и обеспечивает отличную защиту двигателя, фильтры также снижают основное напряжение из-за потерь в индукторе. Это может привести к тому, что двигатель будет потреблять более высокий основной ток er для выработки номинальной мощности.
Эти специализированные фильтры для конкретных приложений изначально были разработаны для ограничения слышимого шума двигателя. Хотя этот подход удаляет все частоты частотно-регулируемого привода выше основной гармоники и обеспечивает отличную защиту двигателя, фильтры также снижают основное напряжение из-за потерь в индукторе. Это может привести к тому, что двигатель будет потреблять более высокий основной ток er для выработки номинальной мощности.
Заключение
Независимо от того, являются ли проблемы резонанса механическими, электрическими или их комбинацией, раннее обнаружение и исправление имеют решающее значение.Проблемы с резонансом не только снижают эффективность системы моторного привода из-за дополнительных потерь, но также могут привести к повреждению оборудования или системы, дорогостоящим простоям и потерям в производстве.
Завод Инжиниринг | Понимание резонанса необходимо для решения проблем вибрации
Не секрет, что сильная вибрация может разрушить подшипники, разрушить валы и потенциально нарушить производство. Менее известно, что резонансные компоненты машин и опорные конструкции могут усилить даже небольшие проблемы с вибрацией, достаточные для того, чтобы повредить подключенное оборудование или вызвать катастрофический отказ машины.Чтобы быстро решить проблему вибрации и избежать таких нежелательных результатов, является важным первым шагом является определить, является ли источник повышенной вибрации резонанс во вращающемся оборудовании или в опорной конструкции.
Менее известно, что резонансные компоненты машин и опорные конструкции могут усилить даже небольшие проблемы с вибрацией, достаточные для того, чтобы повредить подключенное оборудование или вызвать катастрофический отказ машины.Чтобы быстро решить проблему вибрации и избежать таких нежелательных результатов, является важным первым шагом является определить, является ли источник повышенной вибрации резонанс во вращающемся оборудовании или в опорной конструкции.
Резонансная вибрация в механических конструкциях, таких как насосы, турбины и двигатели, возникает, когда собственная частота равна или близка к частоте воздействия, такой как скорость ротора. Если это состояние присутствует, оно может вызвать серьезные уровни вибрации из-за усиления небольших вибрационных сил при работе машины.Такие проблемы часто возникают после того, как было реализовано изменение скорости, например, при модернизации машины с регулируемым приводом (ASD) или при эксплуатации двигателя 50 Гц на мощности 60 Гц. Решение часто зависит от способности различать структурный резонанс и критическую скорость ротора.
Решение часто зависит от способности различать структурный резонанс и критическую скорость ротора.
Структурный резонанс: Структурный резонанс относится к чрезмерным колебаниям невращающихся компонентов, обычно деталей машин или опорных конструкций. Из-за сложности этих компонентов это более распространенное резонансное состояние, которое обычно возникает при или около скорости вращения машины.Даже незначительные вибрационные силы из-за остаточного дисбаланса и смещения машины могут вызвать резонансную структуру основания, что приведет к сильной вибрации. Хорошим примером этого является вибрация с язычковой частотой, которая часто возникает в вертикальных турбинных насосах, у которых двигатель установлен поверх нагнетательного патрубка. Компоненты машины также могут быть резонансными; Есть много примеров двухполюсных электродвигателей, у которых резонансный концевой кронштейн вызывал очень высокую осевую вибрацию при 1 или 2 об / мин.
Критическая скорость ротора: Критическая скорость ротора существует, когда вращающийся элемент машины является резонансным компонентом, а его скорость соответствует собственной частоте ротора. Это характерно для центробежных насосов, газовых и паровых турбин, а также больших двухполюсных электродвигателей. Хотя результат аналогичен структурному резонансу (высокая вибрация при определенной рабочей скорости), критическая скорость ротора является более сложным явлением. Когда рабочая скорость достигает резонансной частоты вращающегося элемента, вращающийся элемент искажается, и силы вибрации значительно возрастают.
Это характерно для центробежных насосов, газовых и паровых турбин, а также больших двухполюсных электродвигателей. Хотя результат аналогичен структурному резонансу (высокая вибрация при определенной рабочей скорости), критическая скорость ротора является более сложным явлением. Когда рабочая скорость достигает резонансной частоты вращающегося элемента, вращающийся элемент искажается, и силы вибрации значительно возрастают.
Важно правильно различать структурный резонанс и критическую скорость ротора.Термин «критическая скорость» (без слова «ротор») несколько неоднозначен. Технически критическая скорость может быть либо структурным резонансом, либо критической скоростью ротора. Для ясности лучше избегать использования этого термина. Во избежание путаницы к обоим условиям можно применить простой термин «резонанс».
Характеристики резонанса
Как описано выше, наиболее заметной характеристикой резонанса является повышенная вибрация при достижении определенной рабочей скорости. Также будет замечено, что по мере увеличения рабочей скорости сверх резонансной частоты амплитуда вибрации несколько уменьшится. График Боде на Рисунке 1 показывает зависимость рабочей скорости от амплитуды. Для иллюстрации предположим, что возбуждающая сила – это остаточный дисбаланс ротора на скорости вращения.
Также будет замечено, что по мере увеличения рабочей скорости сверх резонансной частоты амплитуда вибрации несколько уменьшится. График Боде на Рисунке 1 показывает зависимость рабочей скорости от амплитуды. Для иллюстрации предположим, что возбуждающая сила – это остаточный дисбаланс ротора на скорости вращения.
Формула для расчета собственной частоты:
Где «K» – жесткость резонансной конструкции или компонента, а «W» – вес (масса).Обратите внимание, что в основе этой формулы:
Таким образом, повышенная жесткость увеличивает собственную частоту, а увеличенная масса снижает ее. Это логично, поскольку жесткость создает силу, которая всегда направлена против движения, в то время как масса имеет инерцию, которая является силой, всегда направленной вместе с движением. Резонанс – это то, что происходит, когда эти две противодействующие силы равны; они нейтрализуют друг друга, увеличивая вибрацию.
Коэффициент демпфирования
Третья сила, демпфирование, действует во всем диапазоне скоростей. Демпфирование поглощает энергию вибрации, превращая ее в тепло. При этом демпфирование снижает максимальную амплитуду колебаний при резонансе и увеличивает ширину зоны усиления (рис. 2). Типичный пример демпфирования – амортизаторы на автомобиле. Машины с подшипниками скольжения могут иметь значительное демпфирование, которое может даже маскировать критические скорости. На машинных основаниях бетон и цементный раствор значительно усиливают демпфирование базовой конструкции.
Демпфирование поглощает энергию вибрации, превращая ее в тепло. При этом демпфирование снижает максимальную амплитуду колебаний при резонансе и увеличивает ширину зоны усиления (рис. 2). Типичный пример демпфирования – амортизаторы на автомобиле. Машины с подшипниками скольжения могут иметь значительное демпфирование, которое может даже маскировать критические скорости. На машинных основаниях бетон и цементный раствор значительно усиливают демпфирование базовой конструкции.
Эти силы (жесткость, масса и демпфирование) определяют характеристики резонанса и важны для различия между структурным резонансом и критическими скоростями ротора.
При структурном резонансе машина работает очень близко к резонансной частоте. Это наиболее заметно при низком демпфировании, поскольку в результате возникает очень большая амплитуда вибрации. Есть два жестких режима, которые можно описать как «подпрыгивание» и «качание». Решения включают в себя изменение резонансной частоты, чтобы отодвинуть ее от рабочей скорости, путем изменения жесткости или массы и увеличения демпфирования для непосредственного уменьшения амплитуды. (Различные методы реализации этих корректирующих мер – это тема для другой статьи.Цель здесь – сравнение критических скоростей ротора.)
(Различные методы реализации этих корректирующих мер – это тема для другой статьи.Цель здесь – сравнение критических скоростей ротора.)
С критической частотой вращения ротора проблема совсем другая. Во-первых, жесткость, массу и демпфирование роторов, установленных на подшипниках качения, практически невозможно эффективно изменить, а демпфирование обычно очень низкое. (Примечание. Собственные частоты установленного ротора в машинах с большими подшипниками скольжения обычно можно в некоторой степени изменить, изменив динамику подшипника.) Во-вторых, ни один ротор никогда специально не проектировался так, чтобы критическая скорость была близка к его рабочей скорости.Проблема в этом случае не в том, что рабочая скорость близка к резонансной, а в том, что при критической скорости ротора ротор деформируется, а нелинейные эффекты вызывают чрезмерную вибрацию. В этот момент он становится «гибким ротором», а не «жестким ротором».
Жесткий ротор работает со скоростью ниже критической скорости первого ротора и может иметь многочисленные силы дисбаланса, распределенные вдоль его оси. Сумма этих сил дисбаланса может быть скорректирована в любых двух плоскостях с помощью обычных методов динамической балансировки в двух плоскостях.В этих жестких режимах ротор может немного сгибаться, но движения подшипников точно отражают состояние дисбаланса. Однако, как только ротор становится гибким, выше критической скорости первого ротора, распределение сил дисбаланса искажает ротор, вызывая состояние дисбаланса, которого не было в жестких режимах. Этот дисбаланс гибкого режима вызывает повышенную вибрацию, которая сохраняется на более высоких скоростях.
Сумма этих сил дисбаланса может быть скорректирована в любых двух плоскостях с помощью обычных методов динамической балансировки в двух плоскостях.В этих жестких режимах ротор может немного сгибаться, но движения подшипников точно отражают состояние дисбаланса. Однако, как только ротор становится гибким, выше критической скорости первого ротора, распределение сил дисбаланса искажает ротор, вызывая состояние дисбаланса, которого не было в жестких режимах. Этот дисбаланс гибкого режима вызывает повышенную вибрацию, которая сохраняется на более высоких скоростях.
При структурном резонансе сила постоянна, в то время как колебательный отклик конструкции изменяется со скоростью.При критической скорости ротора сила изменяется по мере деформации ротора, чтобы соответствовать силам дисбаланса, распределенным вдоль оси ротора. Решение критической скорости ротора состоит в том, чтобы устранить силы дисбаланса в различных плоскостях вдоль оси ротора. Обычно невозможно определить, где находятся силы дисбаланса с ротором в жестком режиме, поэтому ротор должен работать выше критической скорости ротора (в гибком режиме), чтобы обнаружить эффекты дисбаланса.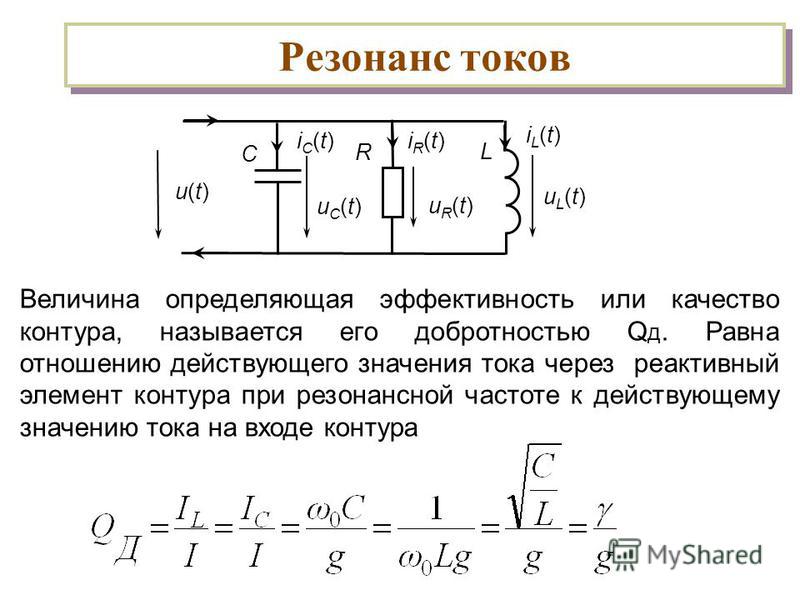
Режимы гибки
По мере увеличения скорости ротора он проходит ряд режимов изгиба: первый режим изгиба; второй режим гибки, третий режим гибки и так далее.
Роторы многоступенчатых насосов, газовых и паровых турбин могут работать выше критической скорости первого или второго ротора, а генераторы иногда работают выше критической скорости третьего ротора. Роторы больших двухполюсных электродвигателей могут работать выше критической скорости первого ротора, но редко выше второй. Роторы, предназначенные для работы в таком «гибком роторе», имеют дополнительные плоскости балансировки для выполнения процедур динамической балансировки, которые устраняют остаточные силы дисбаланса, вызывающие деформацию гибкого ротора.Эти процедуры динамической балансировки требуют, чтобы ротор вращался с рабочей скоростью, что может быть безопасно выполнено только с помощью специально разработанных балансировочных машин в прядильной яме. В качестве альтернативы отдельные компоненты гибких роторов, такие как рабочие колеса, могут быть сбалансированы перед сборкой.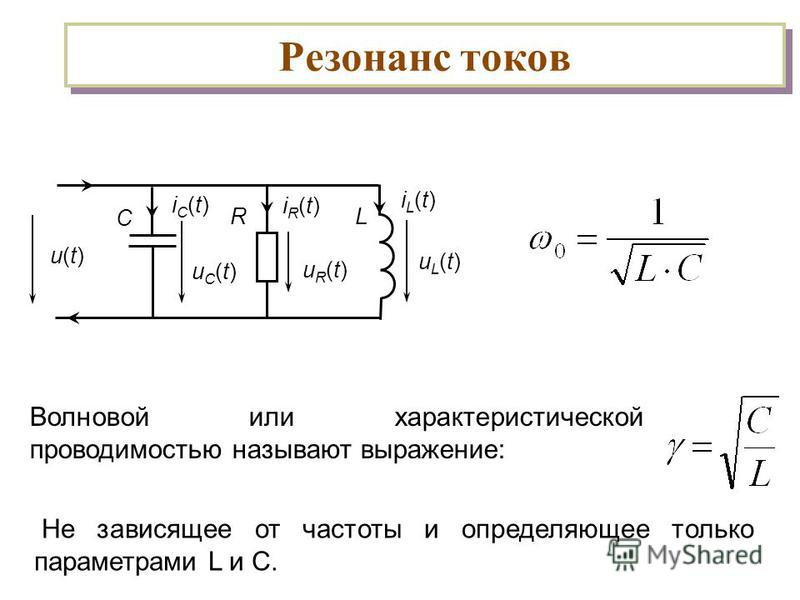
Понимание разницы между структурным резонансом и критическими скоростями ротора поможет прояснить дискуссию для обслуживающего и обслуживающего персонала, особенно когда речь идет о многоступенчатых насосах, турбинах или больших двухполюсных двигателях.
Юджин Фогель (Eugene Vogel) – специалист по насосам и вибрации в Ассоциации обслуживания электрооборудования, Inc. (EASA).
Алгоритмы управления резонансным перенапряжением в преобразователе частоты с длинным кабелем на основе дискретной математики
Чтобы решить проблему, заключающуюся в том, что в системе переменного напряжения и частоты (VVVF) с длинным кабелем не используется эффективный метод управления распределением напряжения конденсатора, что приводит к плохому эффекту управления резонансным перенапряжением, алгоритм управления резонансным перенапряжением для длинного кабеля Исследуется система ВВВФ на основе дискретной математики.Во-первых, устанавливается система привода с преобразованием частоты с длинным кабелем.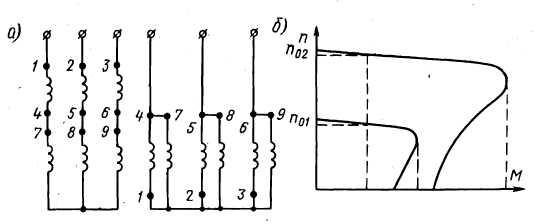 Чтобы обеспечить потерю напряжения в диапазоне требований двигателя, для поддержания работы системы используется режим соединения системы преобразователь частоты – кабель – двигатель (ICM). На основе исследования стратегии управления балансом напряжения конденсаторов системы привода с преобразованием частоты с длинным кабелем, с использованием этой стратегии управления создана дискретная математическая модель стороны переменного тока системы ICM. Усовершенствованный регулятор постоянной активной мощности получается путем создания математической модели, а резонансное перенапряжение в приводе с преобразованием частоты с длинным кабелем реализуется с помощью регулятора постоянной активной мощности.Результаты экспериментов показывают, что алгоритм может эффективно контролировать явление резонансного перенапряжения в системе управления частотой с длинным кабелем, а точность управления составляет более 97%. Он имеет хорошие характеристики и может применяться на практике.
Чтобы обеспечить потерю напряжения в диапазоне требований двигателя, для поддержания работы системы используется режим соединения системы преобразователь частоты – кабель – двигатель (ICM). На основе исследования стратегии управления балансом напряжения конденсаторов системы привода с преобразованием частоты с длинным кабелем, с использованием этой стратегии управления создана дискретная математическая модель стороны переменного тока системы ICM. Усовершенствованный регулятор постоянной активной мощности получается путем создания математической модели, а резонансное перенапряжение в приводе с преобразованием частоты с длинным кабелем реализуется с помощью регулятора постоянной активной мощности.Результаты экспериментов показывают, что алгоритм может эффективно контролировать явление резонансного перенапряжения в системе управления частотой с длинным кабелем, а точность управления составляет более 97%. Он имеет хорошие характеристики и может применяться на практике.
1 Введение
В системе электроприводов металлургической, нефтехимической, бумажной, текстильной и других отраслей в некоторых областях применения расстояние между преобразователем частоты и асинхронным двигателем может достигать сотен метров или даже тысяч метров, в настоящее время оно должно быть соединены длинным кабелем [1].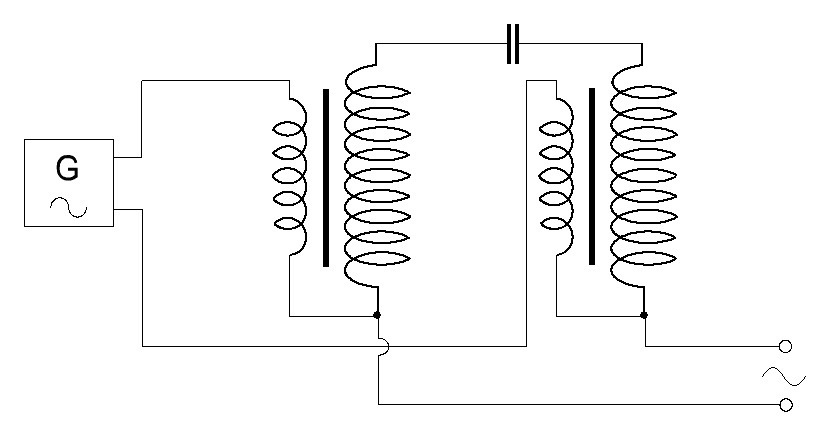 Нарушение изоляции длинных проводов и кабелей представляет большую угрозу для надежной работы системы, что не только влияет на производство, но и увеличивает средства на техническое обслуживание, что приводит к неоправданным экономическим потерям [2]. Из-за распределенной индуктивности и емкости самого кабеля импеданс кабеля не соответствует импедансу двигателя, в результате чего d u / d t двигателя, повреждая обмотку и кабель изоляционный материал двигателя, сокращающий срок службы двигателя и усиливающий электромагнитные помехи [3].Чтобы подавить эффект перенапряжения на стороне двигателя, выходной реактор с падением напряжения 5% от выходного фазного напряжения часто добавляется на выходе преобразователя. Этот метод прост по конструкции и отличается высокой надежностью, особенно при большой мощности. Система широко используется, но стоимость реакторного метода высока, а способность сдерживать перенапряжение ограничена. Поэтому в связи с проблемой подавления перенапряжения в отечественной и зарубежной литературе было проведено множество исследований.
Нарушение изоляции длинных проводов и кабелей представляет большую угрозу для надежной работы системы, что не только влияет на производство, но и увеличивает средства на техническое обслуживание, что приводит к неоправданным экономическим потерям [2]. Из-за распределенной индуктивности и емкости самого кабеля импеданс кабеля не соответствует импедансу двигателя, в результате чего d u / d t двигателя, повреждая обмотку и кабель изоляционный материал двигателя, сокращающий срок службы двигателя и усиливающий электромагнитные помехи [3].Чтобы подавить эффект перенапряжения на стороне двигателя, выходной реактор с падением напряжения 5% от выходного фазного напряжения часто добавляется на выходе преобразователя. Этот метод прост по конструкции и отличается высокой надежностью, особенно при большой мощности. Система широко используется, но стоимость реакторного метода высока, а способность сдерживать перенапряжение ограничена. Поэтому в связи с проблемой подавления перенапряжения в отечественной и зарубежной литературе было проведено множество исследований. В ссылке [4] предлагается выходной LC-фильтр, который подходит для системы преобразователя с высокой частотой переключения; в [5] предлагается добавить RC-фильтр на стороне двигателя; в ссылке [6] фильтр RLC предъявляет высокие требования к согласованию полного сопротивления параметров, что трудно применить на практике. В зависимости от уровня напряжения, мощности, длины кабеля и условий применения преобразователя выбираются различные оптимальные методы подавления перенапряжения.Моделирование и симуляция – самый эффективный и дешевый метод.
В ссылке [4] предлагается выходной LC-фильтр, который подходит для системы преобразователя с высокой частотой переключения; в [5] предлагается добавить RC-фильтр на стороне двигателя; в ссылке [6] фильтр RLC предъявляет высокие требования к согласованию полного сопротивления параметров, что трудно применить на практике. В зависимости от уровня напряжения, мощности, длины кабеля и условий применения преобразователя выбираются различные оптимальные методы подавления перенапряжения.Моделирование и симуляция – самый эффективный и дешевый метод.
Под действием источника переменного тока синусоидальной формы, когда собственная частота системы равна или близка к резонансной частоте системы, система будет иметь резонанс [7]. Поскольку резонанс вызван высшей гармоникой системы, до тех пор, пока гармоника системы устранена, можно избежать резонанса системы. Первый метод – отфильтровать гармонические колебания системы путем установки фильтра [8].Этот метод позволяет не только отфильтровать гармоники, но и ограничить отражение волн. Однако установка фильтра вызовет проблемы с расходами, установкой и обслуживанием. Неправильная установка параметров фильтра приведет к новому резонансу между длинным кабелем и фильтром, что усилит резонансный эффект системы [9]. Второй метод заключается в использовании высокопроизводительного инвертора для уменьшения содержания гармоник в системе. Исследования показывают, что система может значительно уменьшить гармонические составляющие системы без установки фильтра.Однако высокопроизводительные преобразователи дороги и составляют значительную часть инвестиций в систему. После того, как режим подключения системы определен, можно определить электрические параметры в системе, а резонансную частоту можно получить путем расчета и анализа [10]. Следовательно, необходим новый метод подавления резонансного перенапряжения в системе привода с регулируемым длинным кабелем.
Однако установка фильтра вызовет проблемы с расходами, установкой и обслуживанием. Неправильная установка параметров фильтра приведет к новому резонансу между длинным кабелем и фильтром, что усилит резонансный эффект системы [9]. Второй метод заключается в использовании высокопроизводительного инвертора для уменьшения содержания гармоник в системе. Исследования показывают, что система может значительно уменьшить гармонические составляющие системы без установки фильтра.Однако высокопроизводительные преобразователи дороги и составляют значительную часть инвестиций в систему. После того, как режим подключения системы определен, можно определить электрические параметры в системе, а резонансную частоту можно получить путем расчета и анализа [10]. Следовательно, необходим новый метод подавления резонансного перенапряжения в системе привода с регулируемым длинным кабелем.
2 Алгоритмические определения
2.1 Система привода с преобразованием частоты для длинного кабеля
Из-за большой протяженности длинного кабеля нельзя игнорировать влияние параметров распределения..jpg) Предполагая, что напряжение на приемнике
(
Икс
знак равно
0
)
является
V
м
и ток
я
м
, определены граничные условия. Для напряжения и тока на расстоянии x от приемного конца общее решение приведенного выше уравнения выглядит следующим образом:
Предполагая, что напряжение на приемнике
(
Икс
знак равно
0
)
является
V
м
и ток
я
м
, определены граничные условия. Для напряжения и тока на расстоянии x от приемного конца общее решение приведенного выше уравнения выглядит следующим образом:
(1) V Икс знак равно V м + Z б я м 2 е γ Икс + V м – Z б я м 2 е – γ Икс
(2) я Икс знак равно V м / Z б + я м 2 е γ Икс + V м / Z б – я м 2 е – γ Икс
В уравнениях (1) и (2), когда
Икс
знак равно
л
используется, рассчитываются напряжение и ток на конце кабеля.
(3) V C знак равно V м шиш ( γ л ) + Z б я м грех ( γ л )
(4) я C знак равно я м шиш ( γ л ) + V м Z б грех ( γ л )
Однако для анализа связи между кабелем и другими компонентами системы эквивалентная схема [11], которая может представлять характеристики линии передачи, выбирается только с конца.
Согласно уравнениям (3) и (4), a π -образная эквивалентная схема с сосредоточенными параметрами. В π -образная эквивалентная схема длинного кабеля показана на рисунке 1.
Рисунок 1
π -образная схема замещения длинного кабеля.
Из них:
(5) Z 1 ( j ш ) знак равно Z б грех ( γ л )
(6) Z 2 ( j ш ) знак равно Z б грех ( γ л ) шиш ( γ л ) – 1
В приведенных выше уравнениях
z
знак равно
р
+
j
ω
L
обозначает последовательный импеданс / фазу на единицу длины;
у
знак равно
г
+
j
ω
C
обозначает параллельную проводимость / фазу на единицу длины;
Z
б
обозначает характеристическое сопротивление кабеля;
Z
б
знак равно
z
/
у
обозначает коэффициент передачи кабеля; и
γ
знак равно
z
×
у
,
л
обозначает длину кабеля.
Для системы частотно-регулируемого привода на большие расстояния из-за различий в расстоянии от источника питания режим подключения системы также отличается. Исследования показывают, что система электропитания от нескольких километров до более чем десяти километров может гарантировать потерю напряжения в пределах диапазона, необходимого для двигателя, из-за небольшого расстояния. Поэтому принят режим соединения системы преобразователь-кабель-двигатель (ICM), то есть режим соединения системы ICM.Он может соответствовать требованиям.
Поскольку системный резонанс в основном вызывается гармониками высокого порядка системы и относительно высокочастотных компонентов системы, полное сопротивление двигателя очень велико, что эквивалентно разомкнутой цепи в конце кабель [12]. Анализ показывает, что влияние сквозной разомкнутой цепи на результаты анализа в целом не очевидно. Согласно рисунку 1 эквивалентное сопротивление Z C уравнение кабеля выглядит следующим образом:
(7) Z C знак равно Z б 1 танх ( γ л )
Тогда отношение г v напряжения на конце кабеля U м к напряжению на конце кабеля U c это:
(8) г v знак равно 1 шиш ( λ л )
Однако для длинных кабелей, особенно на высоких частотах, необходимо учитывать скин-эффект. Скин-эффект возникает из-за накопления тока на поверхности жилы кабеля, «уменьшения» поперечного сечения жилы и увеличения сопротивления жилы переменному току. Следовательно, скин-эффект оказывает определенное ингибирующее действие на перенапряжение на клеммах двигателя [13]. Обычно интенсивность скин-эффекта можно рассчитать с помощью функции Бесселя, но, учитывая сложность вычисления функции Бесселя, мы применяем метод гиперболической аппроксимации для расчета. Параметры жилы кабеля с учетом скин-эффекта следующие:
Скин-эффект возникает из-за накопления тока на поверхности жилы кабеля, «уменьшения» поперечного сечения жилы и увеличения сопротивления жилы переменному току. Следовательно, скин-эффект оказывает определенное ингибирующее действие на перенапряжение на клеммах двигателя [13]. Обычно интенсивность скин-эффекта можно рассчитать с помощью функции Бесселя, но, учитывая сложность вычисления функции Бесселя, мы применяем метод гиперболической аппроксимации для расчета. Параметры жилы кабеля с учетом скин-эффекта следующие:
(9) р гип знак равно 1 2 π р σ δ грех 2 р δ + грех 2 р δ шиш 2 р δ – потому что 2 р δ Ω м
(10) L гип знак равно 3 μ δ 32 π р грех 2 р δ – грех 2 р δ шиш 2 р δ – потому что 2 р δ ЧАС м
(11) Z б ′ знак равно р гип + j ш [ L гип + ( L е – L гип ( ж 0 ) ) ] г + j ш C
(12) р ′ знак равно { р гип + j ш [ L гип + ( L е – L гип ( ж 0 ) ) ] } ( г + j ш C )
Z б ′ и γ ′ – характеристический импеданс и коэффициент распространения кабеля с учетом скин-эффекта. Из их,
ω
– угловая частота системы,
L
е
– взаимная индуктивность между проводниками, а
ж
0
– частота колебаний кабеля.
σ
– проводимость проводника (для меди
σ
знак равно
5,75
×
10
7
Ω
м
–
1
). мкм – проницаемость среды. В δ Уравнение глубины скин-слоя выглядит следующим образом:
Из их,
ω
– угловая частота системы,
L
е
– взаимная индуктивность между проводниками, а
ж
0
– частота колебаний кабеля.
σ
– проводимость проводника (для меди
σ
знак равно
5,75
×
10
7
Ω
м
–
1
). мкм – проницаемость среды. В δ Уравнение глубины скин-слоя выглядит следующим образом:(13) δ знак равно 2 σ μ ω [ м ]
Подставляя уравнение (11) и уравнение (12) в уравнения (7) и (8), мы можем получить:
(14) Z C знак равно Z б ′ 1 танх ( γ ′ л )
(15) г V знак равно 1 шиш ( γ ′ л )
Из приведенного выше вывода можно найти, что
г
V
является функцией частоты. Согласно уравнению (15) можно получить перенапряжение на клеммах двигателя на разных частотах. Из-за скин-эффекта перенапряжение на клеммах двигателя в определенной степени является постоянным. Более того, с увеличением частоты скин-эффект становится все более очевидным, а амплитуда электрического экстремального перенапряжения постепенно уменьшается [14]. Поэтому мы рассматриваем только резонансную частоту ближайшей основной частоты, то есть резонансную частоту, которая оказывает наибольшее влияние на систему.
2.2 Резонансный контроль перенапряжения
2.2.1 Стратегия модуляции для системы ICM
В системах ICM в качестве стратегий модуляции обычно используются ШИМ с фазовым сдвигом несущей (CPS-PWM), пространственно-векторная ШИМ и модуляция ближайшего уровня. Когда количество уровней слишком велико, количество векторов напряжения слишком велико и управление затруднено. Следовательно, для систем ICM с большим количеством уровней модуляция фазового сдвига несущей и модуляция приближения уровня почти имеют преимущества [15]. В этой статье используется модуляция фазового сдвига несущей, а волна модуляции представляет собой выходное напряжение верхнего и нижнего плеч каждой фазы. Из-за симметрии трехфазных блоков ICM известно, что выходное напряжение верхней и нижней части системы ICM следующее:
(16) ты п j знак равно – ты j О + U Округ Колумбия / 2 ты п j знак равно ты j О + U Округ Колумбия / 2
Несущая – треугольная несущая с частотой
ж
c
, максимальная амплитуда
U
Округ Колумбия
, минимальная амплитуда 0 и фазовый угол
360
/
п
в очереди (
п
количество подмодулей каждого плеча моста).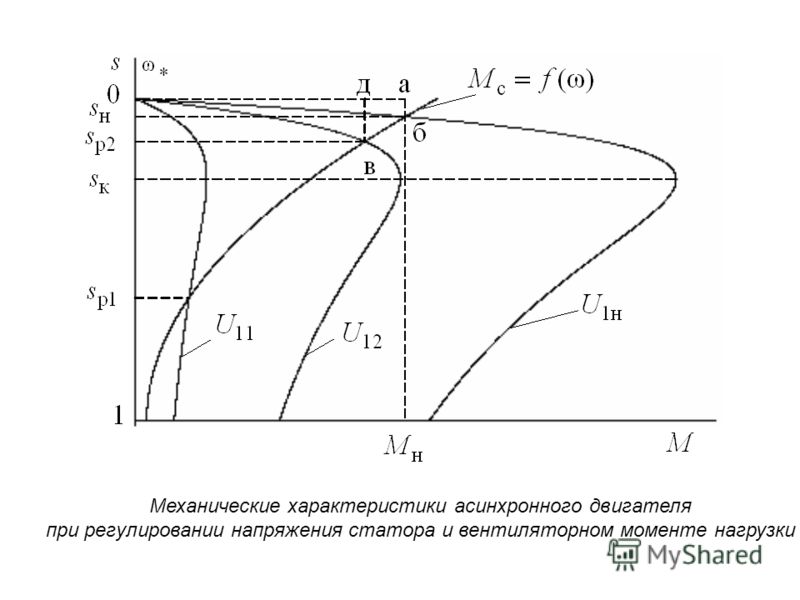 Сигналы запуска каждого подмодуля генерируются путем сравнения модулированной волны с треугольной несущей со сдвинутой по фазе.
Сигналы запуска каждого подмодуля генерируются путем сравнения модулированной волны с треугольной несущей со сдвинутой по фазе.
Когда традиционный метод последовательности используется в управлении балансом емкостных напряжений системы ICM, только в соответствии с направлением тока плеча моста и результатом упорядочения емкостного напряжения субмодулей, соответствующие субмодули выбираются для размещения в или удален [16,17,18], без учета исходного состояния переключения субмодулей, что приводит к частому переключению субмодулей и большим потерям коммутационных устройств.Таким образом, в этой статье используется улучшенный контроль баланса напряжений конденсаторов, то есть на основе традиционного метода упорядочивания, в соответствии с изменением направления тока плеча моста, напряжение конденсатора SM умножается на различные коэффициенты удерживания, а затем упорядочивается [19] . Поток управления выравниванием напряжения конденсатора следующий:
- (1)
Введите емкостное напряжение U c я , текущий я рука модуля верхнего (нижнего) рычага, а также количества модулей п которые следует поместить в одну руку, полученную методом CPS.
- (2)
Определить, есть ли ток руки я рука больше 0.
- (3)
При токе плеча моста я рука больше 0, емкостное напряжение входного субмодуля умножается на коэффициент удерживания немного меньше 1. Затем, согласно п , п модули с меньшим емкостным напряжением выбираются традиционным методом секвенирования.
- (4)
Когда ток плеча моста не превышает 0, напряжение емкости входного субмодуля умножается на коэффициент удерживания, немного меньший 1, и затем п модули с большим емкостным напряжением выбираются традиционным методом упорядочивания.
- (5)
Амплитуда сигнала запуска п выбранных модулей – 1.

- (6)
Выходной импульсный сигнал запуска.
Независимо от того, заряжен или разряжен ток плеча моста, SM, который находится в отключенном состоянии и чье напряжение на конденсаторе отклоняется от номинального значения, умножается на коэффициент удержания, немного превышающий 1, когда применяется управление балансом напряжения конденсатора. Комбинируя условия зарядки и разрядки тока плеча моста, эта статья умножает напряжение конденсатора SM, которое должно быть введено в действие, на различные удерживающие коэффициенты, а затем на последовательности [20], так что SM, который будет запущен в работу, может сохранить свою первоначальную работу. состояние, эффективно улучшить частое переключение субмодулей в системе ICM и снизить частоту переключения и переключение устройств переключения.
2.2.2 Дискретная математическая модель стороны переменного тока
Используя стратегию управления балансом емкостных напряжений, можно увидеть, что две точки соединения
J
и
J
′
реактивных сопротивлений верхнего и нижнего плеча моста, подключенных к эквивалентному управляемому источнику напряжения верхнего и нижнего плеча моста в системе ICM, являются эквипотенциальными точками, поэтому
J
и
J
′
точки могут быть практически короткозамкнутыми. Со стороны переменного тока системы ICM реактивное сопротивление верхнего и нижнего плеча моста каждой фазы эквивалентно параллельному соединению, а эквивалентное реактивное сопротивление параллельного соединения равно
L
/
2
. Таким образом, математическая модель стороны переменного тока системы ICM может быть получена следующим образом:
Со стороны переменного тока системы ICM реактивное сопротивление верхнего и нижнего плеча моста каждой фазы эквивалентно параллельному соединению, а эквивалентное реактивное сопротивление параллельного соединения равно
L
/
2
. Таким образом, математическая модель стороны переменного тока системы ICM может быть получена следующим образом:
(17) ты s j – я s j р S – L S + L 2 d я s j d т знак равно ты j О
В уравнении
ты
j
о
(
j
знак равно
а
,
б
,
c
)
напряжение заземления
J
точка, которая представляет собой выходное напряжение на стороне переменного тока системы ICM.
Преобразование Равного Парка используется в паре (17). Матрица преобразования:
(18) п знак равно 2 3 потому что ω т потому что ( ω т – 120 ° ) потому что ( ω т + 120 ° ) – грех ω т – грех ( ω т – 120 ° ) – грех ( ω т + 120 ° ) 1 / 2 1 / 2 1 / 2
ω основная частота системы. в д – q синхронно вращающаяся система координат, математическая модель системы ICM со стороны переменного тока выглядит следующим образом:
в д – q синхронно вращающаяся система координат, математическая модель системы ICM со стороны переменного тока выглядит следующим образом:(19) ты s d + ω L е я q – р S я d – L е d я d d т знак равно ты d ты s q – ω L е я d – р S я q – L е d я q d т знак равно ты q
В уравнении (19),
L
е
знак равно
L
S
+
L
/
2
;
ты
s
d
,
ты
s
q
,
я
d
,
я
q
, d и q компоненты оси
ты
s
j
и
я
s
j
соответственно;
ты
d
и
ты
q
компоненты оси d и q ты
J
О
.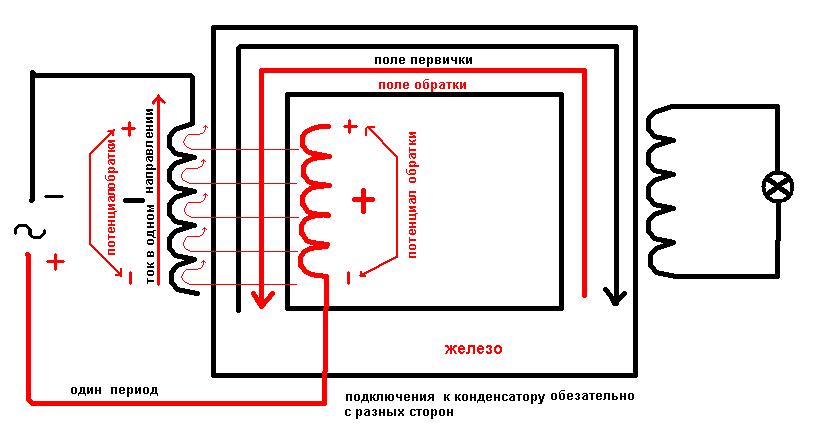
Предполагая, что период выборки системы управления равен Т S , за время выборки т т знак равно k Т S к т + Т S , текущий дифференциальный член в уравнении (19) может быть получен из уравнения приближения Эйлера.
(20) d я d d т ≈ я d ( т + Т S ) – я d ( т ) Т S d я q d т ≈ я q ( т + Т S ) – я q ( т ) Т S
Уравнение (20) используется для дискретизации уравнения (19). Математическая модель дискретизации стороны переменного тока системы ICM получена следующим образом:
Математическая модель дискретизации стороны переменного тока системы ICM получена следующим образом:
(21) ты s d ( т + Т S ) + ω L е я q ( т + Т S ) – р S я d ( т + Т S ) – L е [ я d ( т + Т S ) – я d ( т ) ] / Т S знак равно ты d ( т + Т S ) ты s d ( т + Т S ) – ω L е я d ( т + Т S ) – р S я q ( т + Т S ) – L е [ я q ( т + Т S ) – я q ( т ) ] / Т S знак равно ты q ( т + Т S )
Учитывая, что частота дискретизации системы управления ICM намного выше, чем основная частота системы переменного тока, а изменение напряжения источника питания за период дискретизации очень мало [21], предполагается, что период дискретизации
Т
S
не меняется.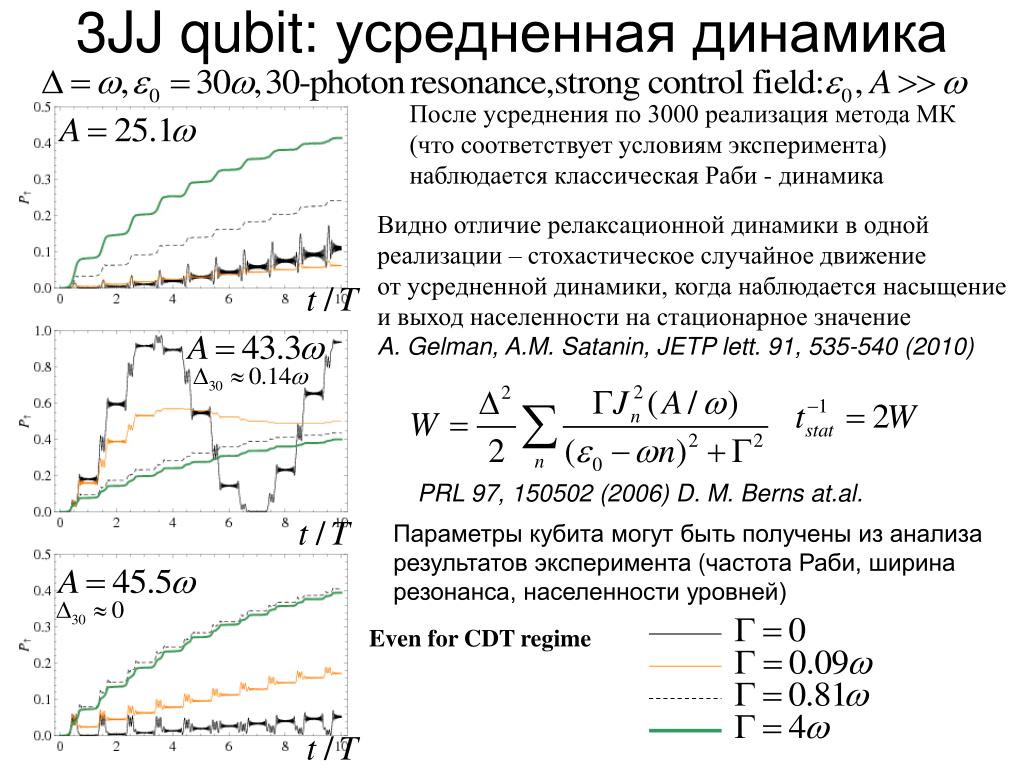
(22) ты s d ( т + Т S ) знак равно ты s d ( т ) ты s q ( т + Т S ) знак равно ты s q ( т )
Кроме того, в практических системах управления, из-за времени вычисления команд управления, текущий контроллер внутреннего цикла обычно имеет задержку периода, поэтому мгновенные значения напряжения и тока при т + Т S время может быть примерно равно эталонным значениям при т время, то есть:
(23) ты d ( т + Т S ) знак равно ты d ссылка ( т ) ты q ( т + Т S ) знак равно ты q ссылка ( т ) я d ( т + Т S ) знак равно я d ссылка ( т ) я q ( т + Т S ) знак равно я q ссылка ( т )
В уравнении (23),
ты
d
ссылка
(
т
)
,
ты
q
ссылка
(
т
)
,
я
d
ссылка
(
т
)
, и
я
q
ссылка
(
т
)
являются соответственно эталонными значениями
ты
d
,
ты
q
,
я
d
, и
я
q
в
т
время, т.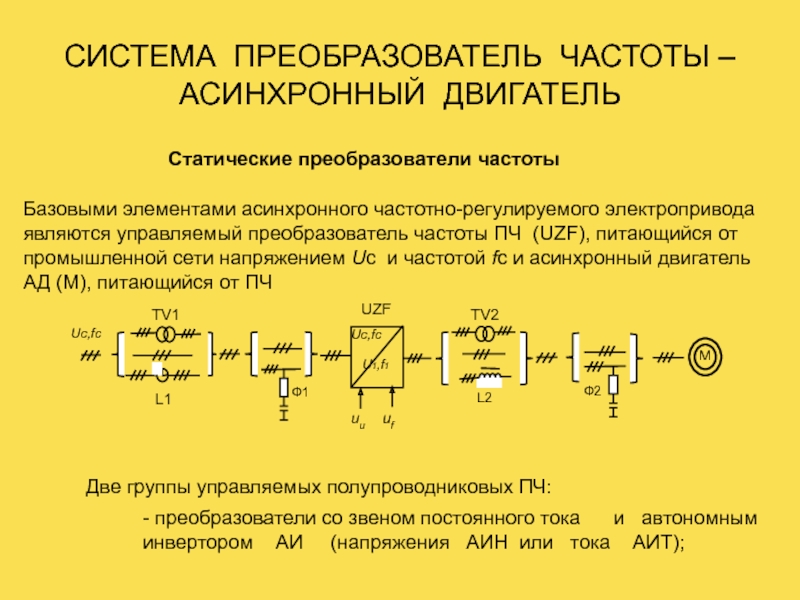 е. ожидаемые выходное напряжение и ток, вводимые в систему ICM при
т
+
Т
S
время в d и q синхронных вращающихся координатах.
е. ожидаемые выходное напряжение и ток, вводимые в систему ICM при
т
+
Т
S
время в d и q синхронных вращающихся координатах.
Подставляя уравнения (22) и (23) в уравнение (21), можно получить, что:
(24) ты s d ( т ) + ω L е я q ( т ) – р S я d ссылка ( т ) – L е [ я d ссылка ( т ) – я d ( т ) ] / Т S знак равно ты d ссылка ( т ) ты s d ( т ) – ω L е я d ( т ) – р S я q ссылка ( т ) – L е [ я q ссылка ( т ) – я q ( т ) ] / Т S знак равно ты q ссылка ( т )
Согласно уравнению (24), можно получить внутренний дискретный контроллер токовой петли стороны переменного тока системы ICM, как показано на рисунке 2.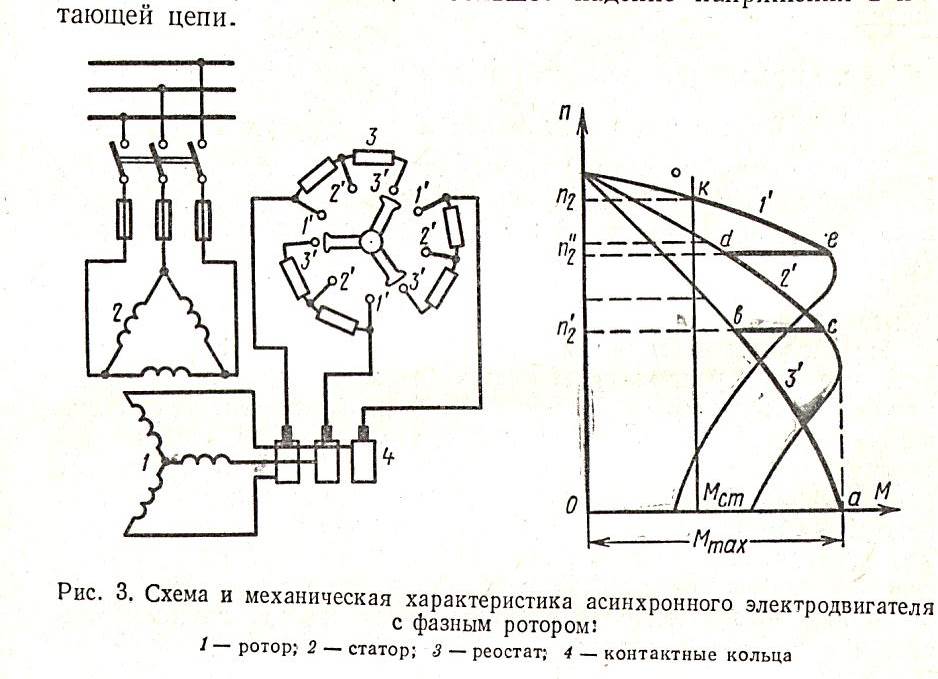
Рисунок 2
Дискретный внутренний регулятор тока системы ICM.
Чтобы сбалансировать мощность, передаваемую в системе постоянного тока, управление внешним контуром системы ICM должно принимать постоянное управление напряжением постоянного тока на одном конце и постоянное управление активной мощностью на другом конце.
Структура регулятора постоянной мощности во внешнем контуре на стороне инвертора и регулятора постоянного напряжения постоянного и переменного тока на стороне выпрямителя показана на рисунке 3.В K п и K я на рисунке показаны, соответственно, пропорциональное усиление и интегральное усиление ПИ-регулятора.
Рисунок 3
Контроллер внешнего контура. а) фиксированный контроллер активной мощности; (б) фиксированный регулятор реактивной мощности; (c) регулятор постоянного напряжения постоянного тока. (d) фиксированный регулятор напряжения переменного тока.
а) фиксированный контроллер активной мощности; (б) фиксированный регулятор реактивной мощности; (c) регулятор постоянного напряжения постоянного тока. (d) фиксированный регулятор напряжения переменного тока.
На Рисунке 3,
п
2ref
и
Q
2ref
– командные значения активной мощности и реактивной мощности инвертирующей стороны соответственно;
п
2
и
Q
2
– измеренные значения активной и реактивной мощности инвертирующей стороны; выходы
я
d
2
ссылка
и
я
q
2
ссылка
контроллера мощности – эталонные значения составляющих d и q тока системы переменного тока на инвертирующей стороне;
U
dcref
и
U
s
1
ссылка
являются значениями команд напряжения шины постоянного тока и шины переменного тока на стороне выпрямления соответственно. U
s
1
ссылка
и
U
s
1
– измеренные значения напряжения шины постоянного тока и напряжения шины переменного тока на стороне выпрямителя; выходы
я
d
1
ссылка
и
я
q
1
ссылка
регулятора напряжения являются эталонными значениями тока d и q компонентов системы переменного тока на стороне выпрямителя.Когда напряжение на стороне переменного тока системы ICM несимметрично или система переменного тока асимметрична, контроллера внешнего контура постоянного напряжения, показанного на рисунке 3, недостаточно для поддержания стабильной работы постоянного напряжения из-за наличия компонентов обратной последовательности.
U
s
1
ссылка
и
U
s
1
– измеренные значения напряжения шины постоянного тока и напряжения шины переменного тока на стороне выпрямителя; выходы
я
d
1
ссылка
и
я
q
1
ссылка
регулятора напряжения являются эталонными значениями тока d и q компонентов системы переменного тока на стороне выпрямителя.Когда напряжение на стороне переменного тока системы ICM несимметрично или система переменного тока асимметрична, контроллера внешнего контура постоянного напряжения, показанного на рисунке 3, недостаточно для поддержания стабильной работы постоянного напряжения из-за наличия компонентов обратной последовательности.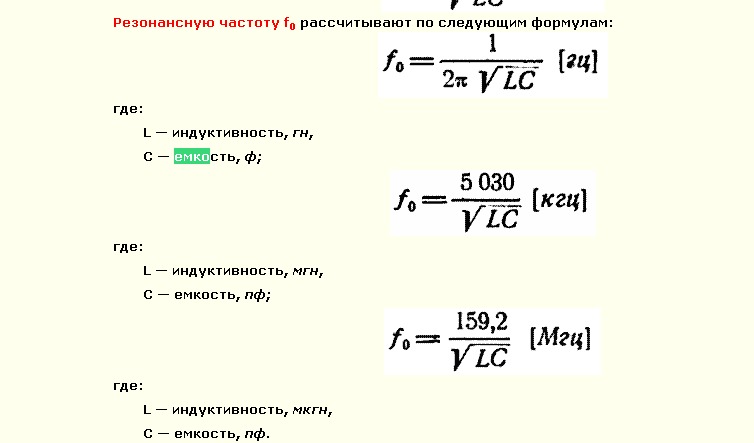 . Особенно когда асимметричный отказ возникает на стороне фиксированного постоянного напряжения, передача активной мощности с обеих сторон является неравномерной. Следовательно, трудно поддерживать контроль постоянного напряжения. Контроллер активной мощности на Рисунке 3 улучшен путем добавления звена управления напряжением постоянного тока на основе первоначально активного управления мощностью, которое может поддерживать стабильное управление напряжением постоянного тока при выходе из строя системы переменного тока и улучшать помехоустойчивую способность устройства Система ICM [22].Усовершенствованный контроллер постоянной активной мощности состоит из двух частей: коррекции команд постоянного напряжения и управления. Корректировка команды напряжения постоянного тока – это коррекция отклонения между значением команды активной мощности P ref и фактическим значением P измерения активной мощности. Корректировка эталонного значения
U
постоянного напряжения получается с помощью регулирования PI.
. Особенно когда асимметричный отказ возникает на стороне фиксированного постоянного напряжения, передача активной мощности с обеих сторон является неравномерной. Следовательно, трудно поддерживать контроль постоянного напряжения. Контроллер активной мощности на Рисунке 3 улучшен путем добавления звена управления напряжением постоянного тока на основе первоначально активного управления мощностью, которое может поддерживать стабильное управление напряжением постоянного тока при выходе из строя системы переменного тока и улучшать помехоустойчивую способность устройства Система ICM [22].Усовершенствованный контроллер постоянной активной мощности состоит из двух частей: коррекции команд постоянного напряжения и управления. Корректировка команды напряжения постоянного тока – это коррекция отклонения между значением команды активной мощности P ref и фактическим значением P измерения активной мощности. Корректировка эталонного значения
U
постоянного напряжения получается с помощью регулирования PI.
(25) Δ U dcref знак равно K п + K я S ( п ссылка – п )
Пересмотренное значение команды напряжения постоянного тока:
(26) U ′ dcref знак равно U dcref + Δ U dcref
Управляющее звено – это отклонение от измененного значения инструкции напряжения постоянного тока.
U
dcref
′
и значение измерения постоянного напряжения
U
Округ Колумбия
. Эталонное значение тока оси d я
d
ссылка
получается регулировкой PI.
Эталонное значение тока оси d я
d
ссылка
получается регулировкой PI.
(27) я d ссылка знак равно [ K п + ( K я / S ) ] ( U dcref ′ – U Округ Колумбия )
Структура фиксированного контроллера активной мощности, который можно улучшить, показана на рисунке 4.
Рисунок 4
Улучшенный контроллер активной мощности.
Усовершенствованный фиксированный контроллер активной мощности, показанный на рисунке 4, может эффективно контролировать явление перенапряжения в системе привода с преобразованием частоты с длинным кабелем.
3 Результаты
Чтобы убедиться, что алгоритм в этой статье предназначен для управления резонансным перенапряжением привода с длинным кабелем путем преобразования частоты, система привода с длинным кабелем, управляемая алгоритмом, моделируется на основе программного обеспечения для моделирования MATLAB.Напряжение питания системы 4 160 В, номинальная мощность 60 Гц [23]. Номинальное напряжение преобразователя среднего напряжения – 41 160 В, номинальный ток – 140 А, номинальная мощность – 1000 К. ВА; кабель 15 км диаметром 150 мм 2 ; номинальное напряжение двигателя 3848 В, номинальный ток 130 А, номинальная мощность 840 л.с. и номинальный крутящий момент 1400 Н · м.
Пусковая частота двигателя в системе частотно-регулируемого привода с длинным кабелем, управляемая этим алгоритмом, показана на рисунке 5.
Рисунок 5
Кривая нарастания пусковой частоты.
В соответствии с частотой запуска двигателя системы частотно-регулируемого привода с длинным кабелем на Рисунке 5 можно увидеть, что начальная частота системы частотно-регулируемого привода с длинным кабелем, управляемая алгоритмом, описанным в этом документе, постепенно увеличивается, переходя к постоянной скорости. примерно через 15 с и, наконец, достигнув 65 Гц. Можно видеть, что алгоритм может эффективно контролировать явление резонансного перенапряжения в системе управления частотой с длинным кабелем с высокой точностью управления и хорошими характеристиками, что может найти широкое применение.
Момент нагрузки является функцией скорости двигателя в системе частотно-регулируемого привода с длинным кабелем. Характеристики момента нагрузки двигателя в системе частотно-регулируемого привода с длинным кабелем показаны на Рисунке 6.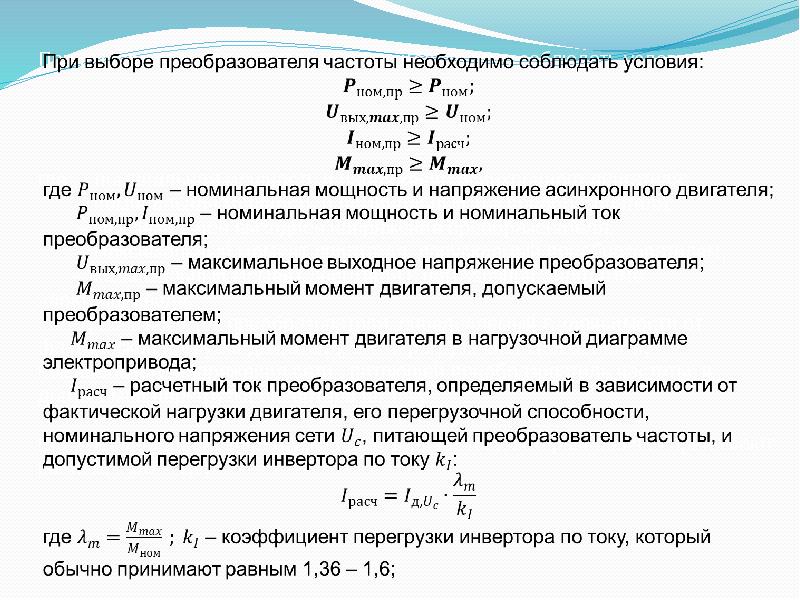
Изменение электромагнитного момента двигателя получается из характеристик момента нагрузки двигателя с частотно-регулируемым приводом с длинным кабелем на рисунке 6, как показано на рисунке 7.
Рисунок 7
Электромагнитный крутящий момент двигателя изменяется.
Согласно результатам измерения электромагнитного момента двигателя с частотно-регулируемым приводом с длинным кабелем на Рисунке 7, можно увидеть, что с изменением пусковой частоты двигателя электромагнитный момент также изменяется, и колебания велики. Полное изменение тенденции электромагнитного момента двигателя с частотно-регулируемым приводом с длинным кабелем изменяется с изменением момента нагрузки до достижения номинального момента [24]. Большие колебания крутящего момента двигателя в системе частотно-регулируемого привода с длинным кабелем в основном связаны с искажением синусоидального сигнала управления и скорости на границе изменения частоты.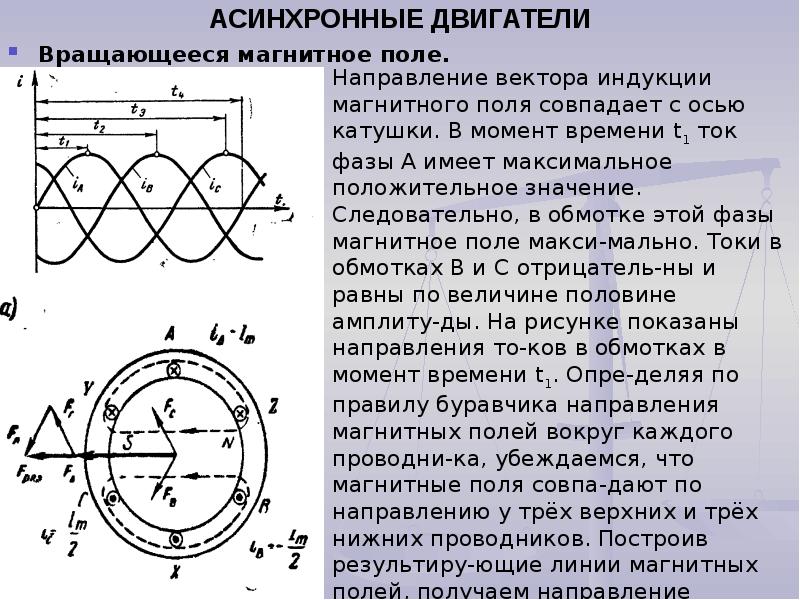 Это связано с тем, что время изменения частоты не обязательно происходит в конце полного цикла сигнала настройки. Перед окончанием одного цикла управляющего сигнала первый полупериод сигнала в следующем цикле может быть расширен или сужен.
Это связано с тем, что время изменения частоты не обязательно происходит в конце полного цикла сигнала настройки. Перед окончанием одного цикла управляющего сигнала первый полупериод сигнала в следующем цикле может быть расширен или сужен.
Управляющий сигнал системы преобразователя частоты с длинным кабелем управляется алгоритмом, представленным в этой статье, как показано на рисунке 8.
После использования этого алгоритма для управления системой привода с преобразованием частоты с длинным кабелем, изменение тока статора двигателя в системе с преобразователем частоты с длинным кабелем показано на рисунке 9.
Рисунок 9
Изменяется ток статора двигателя.
Из рисунка 9 видно, что пусковой ток двигателя примерно в 1,5 раза больше номинального тока преобразователя частоты, а продолжительность очень мала в пределах требуемого диапазона преобразователя частоты [25]. С изменением момента нагрузки ток статора имеет ту же тенденцию и, наконец, переходит в состояние номинального тока.
С изменением момента нагрузки ток статора имеет ту же тенденцию и, наконец, переходит в состояние номинального тока.
Изменение напряжения статора двигателя системы привода с преобразованием частоты с длинным кабелем показано на рисунке 10 после использования алгоритма для управления системой преобразователя частоты с длинным кабелем.
Рисунок 10
Изменения напряжения статора двигателя.
Из результатов моделирования на Рисунке 10 видно, что напряжение статора двигателя постепенно увеличивается с увеличением частоты системы и, наконец, стабилизируется около номинального напряжения после использования алгоритма для управления системой частотно-регулируемого привода с длинным кабелем.Из приведенных выше экспериментальных результатов можно увидеть, что предложенный алгоритм может управлять системой преобразователя частоты с длинным кабелем, которая может удовлетворить нормальные требования к запуску двигателя и предотвратить возникновение явления перенапряжения.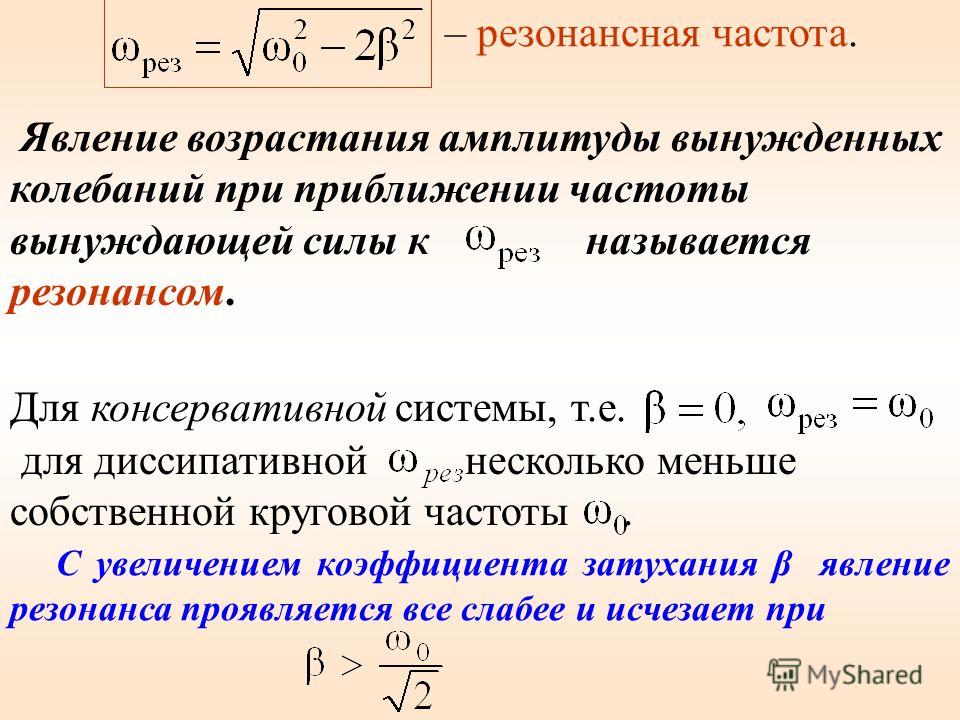
Для дальнейшей проверки управляющего эффекта предложенного алгоритма используются три алгоритма для управления резонансным перенапряжением в преобразователе частоты с длинным кабелем путем сравнения предложенного алгоритма с алгоритмом широтно-импульсной модуляции и алгоритмом MultiMedia Card (MMC).Результаты сравнения трех алгоритмов показаны в таблице 1.
Таблица 1Сравнение результатов трех алгоритмов управления
| Количество опытов | Этот алгоритм | Алгоритм широтно-импульсной модуляции | Алгоритм MMC | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Точность регулирования /% | Время регулирования / с | Прочность /% | Точность управления /% | Время регулирования / с | Прочность /% | Точность управления /% | Время регулирования / с | Прочность /% | |
| 1 | 98.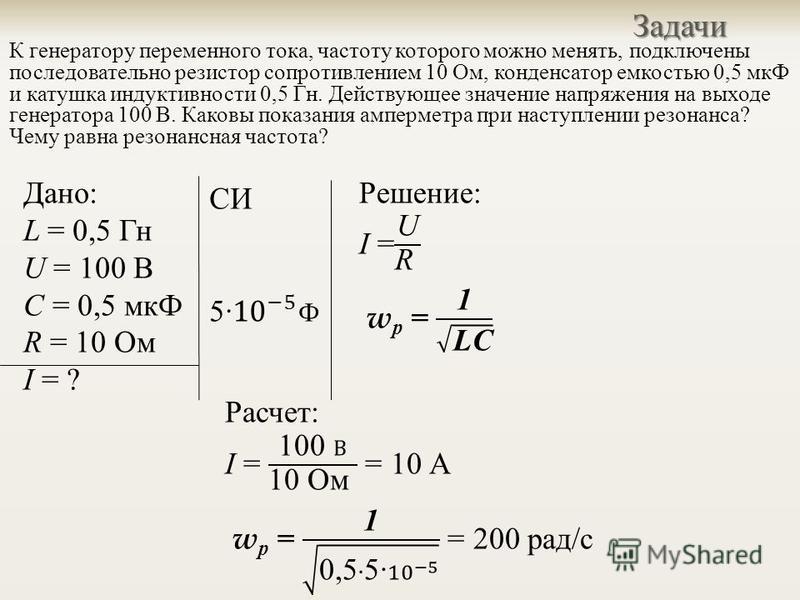 51 51 | 10,52 | 99,05 | 91,52 | 18,62 | 87,18 | 89,62 | 22,61 | 86,51 |
| 2 | 98,47 | 11,52 | 98,12 | 92,64 | 19,64 | 86,54 | 93,64 | 18,64 | 85.46 |
| 3 | 98,62 | 12,64 | 97,18 | 91,36 | 20,18 | 88,19 | 91,54 | 23,61 | 84,71 |
| 4 | 97,58 | 11,85 | 97,48 | 93,64 | 18,64 | 87,49 | 92.07 | 17,42 | 91,62 |
| 5 | 99,05 | 12,47 | 98,15 | 93,05 | 18,61 | 83,36 | 95,17 | 16,84 | 92,67 |
| 6 | 97,65 | 12,96 | 97,05 | 92,14 | 19.-1.PNG) 62 62 | 91,58 | 91,26 | 21,54 | 88,64 |
| 7 | 98,05 | 9,64 | 98,17 | 93,64 | 19,89 | 94,36 | 92,64 | 23,64 | 87,49 |
| 8 | 97,58 | 10,11 | 98.47 | 91,47 | 19,99 | 87,62 | 88,47 | 22,08 | 89,65 |
| 9 | 97,36 | 10,63 | 98,05 | 92,61 | 20,47 | 81,62 | 87,64 | 19,64 | 88,29 |
| 10 | 99.15 | 11,47 | 98,34 | 90,74 | 19,68 | 84,62 | 89,05 | 21,47 | 90,54 |
Из экспериментальных результатов в таблице 1 видно, что точность управления предложенным алгоритмом выше 97%, в то время как точность управления алгоритма широтно-импульсной модуляции и алгоритма MMC ниже 96%, а предлагаемый алгоритм является используется для управления резонансным перенапряжением в преобразователе частоты с длинным кабелем.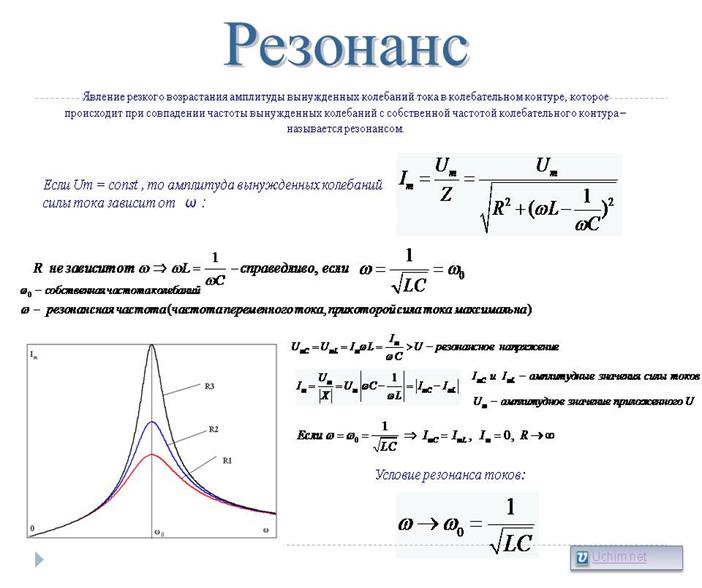 Время контроля явления резонансного перенапряжения составляет около 10 с, а время контроля алгоритма широтно-импульсной модуляции и алгоритма MMC составляет около 20 с [26]. Точность управления и время управления этого алгоритма, очевидно, лучше, чем у двух других алгоритмов, а надежность этого алгоритма для управления явлением резонансного перенапряжения в частотно-регулируемом приводе с длинным кабелем выше. В-третьих, надежность этого алгоритма для управления явлением резонансного перенапряжения в частотно-регулируемом приводе с длинным кабелем выше.Проверена управляемость предложенного алгоритма. Можно видеть, что алгоритм управления резонансным перенапряжением, основанный на дискретной математике, имеет высокую точность управления, короткое время управления и хорошую надежность, что позволяет эффективно контролировать явление резонансного перенапряжения в системе управления частотой с длинным кабелем и может применяться в реальной жизни. .
Время контроля явления резонансного перенапряжения составляет около 10 с, а время контроля алгоритма широтно-импульсной модуляции и алгоритма MMC составляет около 20 с [26]. Точность управления и время управления этого алгоритма, очевидно, лучше, чем у двух других алгоритмов, а надежность этого алгоритма для управления явлением резонансного перенапряжения в частотно-регулируемом приводе с длинным кабелем выше. В-третьих, надежность этого алгоритма для управления явлением резонансного перенапряжения в частотно-регулируемом приводе с длинным кабелем выше.Проверена управляемость предложенного алгоритма. Можно видеть, что алгоритм управления резонансным перенапряжением, основанный на дискретной математике, имеет высокую точность управления, короткое время управления и хорошую надежность, что позволяет эффективно контролировать явление резонансного перенапряжения в системе управления частотой с длинным кабелем и может применяться в реальной жизни. .
4 Обсуждения
Резонанс относится к периодическому или квазипериодическому рабочему состоянию колебательной системы, которое характеризуется резким увеличением амплитуды одной или нескольких гармоник. Как правило, последовательный резонанс вызывает перенапряжение в части энергосистемы, подвергая опасности изоляцию электрического оборудования. Он также может вырабатывать электричество и сжигать оборудование. Это также может повлиять на рабочие условия устройств защиты от перенапряжения, например, на условия гашения дуги вентильных разрядников. Резонанс – это своего рода стационарное явление. Резонансное перенапряжение в энергосистеме будет происходить не только в переходном процессе операции или аварии, но также стабильно существовать в течение длительного времени после переходного процесса, пока не произойдет новая операция и состояние резонанса не будет нарушено.Следовательно, продолжительность резонансного перенапряжения больше, чем продолжительность действия. Чем больше время подачи напряжения, тем больше вреда для изоляции электрооборудования. Перенапряжение обычно имеет серьезные последствия [27]. Опыт эксплуатации показывает, что резонансные перенапряжения будут возникать на всех уровнях напряжения электросети, особенно при 35 кВ и ниже, что приведет к большему количеству аварий.
Как правило, последовательный резонанс вызывает перенапряжение в части энергосистемы, подвергая опасности изоляцию электрического оборудования. Он также может вырабатывать электричество и сжигать оборудование. Это также может повлиять на рабочие условия устройств защиты от перенапряжения, например, на условия гашения дуги вентильных разрядников. Резонанс – это своего рода стационарное явление. Резонансное перенапряжение в энергосистеме будет происходить не только в переходном процессе операции или аварии, но также стабильно существовать в течение длительного времени после переходного процесса, пока не произойдет новая операция и состояние резонанса не будет нарушено.Следовательно, продолжительность резонансного перенапряжения больше, чем продолжительность действия. Чем больше время подачи напряжения, тем больше вреда для изоляции электрооборудования. Перенапряжение обычно имеет серьезные последствия [27]. Опыт эксплуатации показывает, что резонансные перенапряжения будут возникать на всех уровнях напряжения электросети, особенно при 35 кВ и ниже, что приведет к большему количеству аварий.
При нормальной синхронной работе реактивное сопротивление гидрогенератора будет изменяться через два цикла после каждого цикла.Кроме того, реактивное сопротивление гидрогенератора или турбогенератора периодически изменяется с изменением потока статора во время асинхронной или синхронной работы. Во всех этих случаях, если реактивное сопротивление внешней цепи двигателя соответствует определенным условиям, а сопротивление потерь достаточно мало, можно возбудить в колебательном контуре особое явление параметрического резонанса с периодическими изменениями параметров индуктивности. Во время периодического изменения параметров индуктивности резонанс между индуктивностью и емкостью будет проходить непрерывно.Точка колебания приводит к резкому росту напряжения и амплитуды тока на конце синхронного двигателя, а коэффициент перенапряжения самовозбуждения высокий. Это не только угрожает изоляции электрооборудования и повреждает ОПН, но и препятствует параллельной работе двигателя с другими источниками питания.
Электрооборудование, работающее в электросети, по некоторым причинам, таким как смещение напряжения нейтральной точки, неполнофазный выключатель или другие операции, насыщение трансформатора электромагнитного напряжения и т. Д., Легко создают резонансное перенапряжение.Перенапряжение сначала вызывает старение оборудования, а электрическое оборудование с низким уровнем изоляции повреждается, что в конечном итоге приводит к несчастным случаям. Чтобы избежать таких аварий, насколько это возможно, необходимо максимально предотвратить резонансное перенапряжение. Обычно принимаются следующие меры:
- (1)
Необходимо выполнить необходимые расчеты при проектировании и принять необходимые меры в процессе эксплуатации, чтобы избежать нежелательных резонансных цепей. Следует принять дополнительные меры для предотвращения резонанса и уменьшения амплитуды резонансного перенапряжения и сокращения времени его существования.
- (2)
Убедитесь, что трехфазная синхронная работа автоматического выключателя не происходит при работе во всех фазах, чтобы избежать образования напряжения смещения нейтральной точки. Избегайте возникновения отказа автоматического выключателя, не используйте оборудование с предохранителями.
- (3)
Усилить контроль и техническое обслуживание линии, чтобы избежать поломки линии.
- (4)
Выберите трансформаторы напряжения с лучшими характеристиками возбуждения и емкостные трансформаторы напряжения.
- (5)
К шине добавляется определенная емкость заземления.
- (6)
Регулярно содержите электрооборудование в чистоте.
Конечно, есть много причин перенапряжения, например, грозовое перенапряжение, коммутационное перенапряжение и так далее. Не только резонанс вызывает перенапряжение. Однако резонансные перенапряжения – одна из наиболее частых и вредных причин аварий оборудования энергосистемы, которую нельзя тщательно устранить.
5 Выводы
Явление резонансного перенапряжения может легко вызвать повреждение силовых устройств или даже крупномасштабное отключение электроэнергии. Чтобы эффективно управлять явлением резонансного перенапряжения в приводе с преобразованием частоты с длинным кабелем, изучается система преобразователя частоты с длинным кабелем с режимом подключения системы ICM, и установлено число дискретизации на стороне переменного тока системы преобразователя частоты с длинным кабелем. . На основе дискретной математической модели разработан усовершенствованный постоянно активный регулятор мощности для эффективного управления резонансным перенапряжением в частотно-регулируемом приводе с длинным кабелем.Результаты экспериментов показывают, что предложенный алгоритм обладает высокой эффективностью управления и хорошей надежностью при управлении явлением резонансного перенапряжения в приводе с преобразованием частоты с длинным кабелем и может эффективно обеспечивать безопасность работы привода с преобразованием частоты с длинным кабелем.
В будущих исследованиях, чтобы лучше контролировать явление резонансного перенапряжения в частотно-регулируемом приводе с длинным кабелем, целью будет более точное регулирование, а алгоритм управления перенапряжением с регулируемой скоростью с длинным кабелем, основанный на дискретной математике, будет усовершенствован. оптимизирован.
Работа поддержана Фондом фундаментальных исследований для центральных университетов (№ 3142018049).
Ссылки
[1] Zhang ZJ, Lu JY, Liu HY. Исследование технологии дистанционной передачи данных измерения мощности нелинейной системы электроснабжения в условиях гармонического фона. J China Acad Electron Inf Technol. 2018; 13: 93–9. Искать в Google Scholar
[2] Jiang LF, Zhang ZW. Анализ и конструкция полномостового резонансного преобразователя ХНЛ с двойными резонансными баками.J Источник питания. 2017; 15: 92–8. Искать в Google Scholar
[3] Wang N, Liu YF, Pei PC. Асимптотический анализ влияния относительной влажности на падение напряжения топливного элемента. Чин Дж. Источники энергии. 2017; 41: 1130–2. Искать в Google Scholar
[4] Fang JL, Zheng JF, Xie YJ. Исследование и применение оптимальной модели низковольтной схемы управления распределительной сетью. Autom Instrum. 2017; 3: 145–8. Искать в Google Scholar
[5] Ding N, Xu X, Zheng ZQ. Анализ масштабного эффекта втягивающего напряжения электростатически управляемого микропучка.J Jilin Univ (Sci Ed). 2017; 55: 1146–50. Искать в Google Scholar
[6] Liu W, Zhang YB, Lan ZY. Исследование стратегии управления замкнутой системой трехфазного выпрямителя напряжения с ШИМ. Comp Simul. 2017; 34: 185–8. Искать в Google Scholar
[7] Яо Ю. Метод прогнозирования скорости асинхронного двигателя с частотно-регулируемым приводом, работающего с неисправностью. J Дискретная математика Sci Cryptograph. 2017; 20 (6–7): 1405–9. Искать в Google Scholar
[8] Лустиг М., Уяник К. Теория Перрона – Фробениуса и частотная сходимость для приводимых замен.Дискрет Cont Dyn Syst – Ser A (DCDS-A). 2017; 37: 355–85. Поиск в Google Scholar
[9] Calastri C, Hess S, Daly A. Моделирование режима контактов и частоты взаимодействий с участниками социальных сетей с использованием многократной дискретно-непрерывной модели экстремальных значений. Transp Res Part C Emerg Technol. 2017; 76: 16–34. Искать в Google Scholar
[10] Ecevit F, Özen HÇ. Частотно-адаптированные методы граничных элементов Галеркина для задач выпуклого рассеяния. Numerische Mathematik. 2017; 135: 27–71.Поиск в Google Scholar
[11] Hu Y, Zhu ZQ, Odavic M. Мгновенное управление мощностью для подавления напряжения второй гармоники шины постоянного тока в обычных несимметричных рабочих условиях. IEEE Trans Power Electron. 2017; 32: 3998–4006. Искать в Google Scholar
[12] Дай Й, Ли Дж, Чжан З. Отображение частоты в реальном времени на основе спектрально-дискретной хроматической дисперсии. Opt Express. 2017; 25: 16660. Искать в Google Scholar
[13] Quan X, Dou X, Zaijun WU. Алгоритм трехфазной сетевой синхронизации на основе адаптивного дискретного фильтра комплексной переменной.Autom Electr Power Syst. 2017; 41: 158–64. Искать в Google Scholar
[14] Kuehl JJ. Дискретные и частотно-частотные распределения с конечной полосой пропускания в приложениях нелинейной устойчивости. 2017; 29: 024101. Искать в Google Scholar
[15] Ахду Й., Камилли Ф., Корриас Л. О численном приближении системы переноса Гамильтона-Якоби, возникающей в высокочастотных приближениях. Дискрет Cont Dyn Syst – Ser B (DCDS-B). 2017; 19: 629–50. Искать в Google Scholar
[16] Gu Y, Yang GH.Обнаружение неисправностей для липшицевых нелинейных систем с дискретным временем в конечной частотной области. IET Control Theory Appl. 2017; 11: 2177–86. Искать в Google Scholar
[17] Atangana A, Alqahtani RT. Модель опухоли с интрузивной морфологией, прогрессирующей фенотипической гетерогенностью и памятью. Eur Phys J Plus. 2018; 133: 85. Искать в Google Scholar
[18] Gomez-Aguilar JF, Atangana A, Escobar-Jimenez RF. Численные решения закона Фурье с использованием дробных производных с двойным порядком.Sci Iran. 2018; 25 (4): 2175–85. Искать в Google Scholar
[19] Quan X, Dou X, Wu Z. Краткий дискретный адаптивный фильтр для оценки частоты при искаженном трехфазном напряжении. IEEE Trans Power Electron. 2017; 32: 1. Искать в Google Scholar
[20] Ming Y, Sima W, Yang Q. Нелинейное извлечение характеристической величины временных рядов феррорезонансных перенапряжений. IET Gener Transm Distrib. 2017; 11: 1427–33. Искать в Google Scholar
[21] Шакиб СМСИ, Мехилеф С. Резонансный преобразователь серии LLC на основе частотно-адаптивного управления фазовой модуляцией для широких применений входного напряжения.IEEE Trans Power Electron. 2017; 32: 8360–70. Искать в Google Scholar
[22] Lin HC, Hsiao KC. Разработка модели постоянного тока нагрузки с использованием алгоритма резонансного переключения с обратной связью для защиты от перегрузки. IET Circuits Devices Syst. 2017; 11: 656–65. Искать в Google Scholar
[23] Gao W, Wang WF. Пятый геометрическо-арифметический показатель мостового графа и углеродных наноконусов. J Diff Equ Appl. 2017; 23 (1–2СИ): 100–9. Искать в Google Scholar
[24] Lakshminarayana G, et al.Перистальтическое скользящее течение жидкости Бингема в наклонном пористом канале с джоулеевым нагревом. Appl Math Nonlinear Sci. 2018; 3 (1): 41–54. Искать в Google Scholar
[25] Mi C, Shen Y, Mi WJ, Huang YF. Алгоритм идентификации судов на основе трехмерного облака точек для автоматизированных погрузчиков судов. J Coast Res. 2015: 28–34. Искать в Google Scholar
[26] Хеллат Ф, Хормизи МБ. Глобальное решение уравнения реакции-диффузии на ограниченных областях. Appl Math Nonlinear Sci. 2018; 3 (1): 15–22. Искать в Google Scholar
[27] Fernández-Pousa CR.Совершенные последовательности импульсов с фазовым кодированием, генерируемые эффектом Тальбота. Appl Math Nonlinear Sci. 2018; 3 (1): 23–32. Искать в Google Scholar
AB-029: Вибрационные двигатели – зависимость напряжения от частоты и амплитуды
Обзор
Нас часто спрашивают, как отрегулировать амплитуду или частоту вибрации наших различных вибромоторов. В этой статье мы рассмотрим, насколько это просто, почему это может быть полезно и как мы можем предсказать поведение двигателя, используя управляющее напряжение и график типичных рабочих характеристик.
Это будет более практичная статья, чем AB-004: Понимание характеристик вибрационного двигателя ERM, и более подробная, чем в нашей предыдущей публикации в блоге.
Существует два основных типа вибрационных двигателей: эксцентриковая вращающаяся масса (ERM) и линейные резонансные приводы (LRA). Для оптимальной работы LRA требуется очень специфическая резонансная частота и сигнал привода переменного тока, поэтому в данном бюллетене по применению будет уделено внимание только ERM. Вместо этого вы можете прочитать о характеристиках LRA в AB-020.
Зачем менять амплитуду вибрации?
Важно понимать, что, хотя мы можем измерить амплитуду вибрации в контролируемой лабораторной среде, восприятие этой вибрации в реальном мире будет варьироваться из-за множества факторов, включая (но не ограничиваясь):
- Жесткость или гибкость устройства
- Ориентация двигателя
- Масса прибора
- Возраст пользователя
- Положение прибора на теле
- Частота вибрации
- Факторы окружающей среды
Приложения могут иметь самые разные требования к амплитуде вибрации. Небольшое носимое устройство для детей потребует гораздо меньшей интенсивности вибрации, чем промышленный бункер.
Изменение интенсивности вибрации также позволяет реализовать улучшенные тактильные эффекты. Это растущая и захватывающая область, поскольку она позволяет различным встроенным технологиям передавать все больший объем информации только посредством вибрации. Изменяя интенсивность и характер вибрации, можно создавать практически неограниченное количество комбинаций, ритмов или сообщений. В частности, в области носимых устройств и автомобилестроения наблюдается все большее распространение этой технологии.
Зачем менять частоту вибрации?
Результаты тестирования тактильной обратной связи
Важно отметить, что в ERM амплитуда и частота колебаний неразрывно связаны.На изображении выше голубая линия представляет измеренную амплитуду вибрации. Величина волны – это амплитуда, а период – это частота колебаний. Обратите внимание, как с увеличением величины период сокращается (= увеличивается частота).
Поскольку вы не можете изменить одно, не изменив другого, наиболее распространенной причиной изменения частоты вибрации является изменение амплитуды. Однако частота вибрации также имеет свои последствия.
Так же, как человеческое ухо воспринимает звуки одной частоты громче других, вибрации воспринимаются немного по-разному в зависимости от их частоты.Различные механорецепторы обнаруживают вибрацию на разных частотах, например, тельца Пачини лучше всего обнаруживает вибрации в диапазоне 40-800 Гц с его пиковым восприятием между 200 и 300 Гц.
В автомобильной среде присутствует множество источников вибрации, например, двигатель, дорога, кондиционер и радио могут создавать вибрацию в широком диапазоне частот. Чтобы предотвратить потерю тактильной обратной связи среди этого шума, часто необходимо использовать легко различимые частоты.
Пример автомобильной панели приборов с тачскрином
Для небольшого набора приложений требуется очень специфическая частота, возможно, это необходимо для того, чтобы вызвать биологический эффект, или есть определенные механические требования. Используя поворотные энкодеры или измерение обратной ЭДС, мы можем разработать алгоритм управления с обратной связью, который поддерживает скорость двигателя, при необходимости регулируя управляющее напряжение. Это гарантирует, что скорость остается в более жестких допусках, чем указано в производственной спецификации.
Другой аспект, о котором часто забывают, – это смещение, возникающее при вибрации двигателя. Если мы возьмем два двигателя с одинаковой амплитудой колебаний, но с разной частотой колебаний, более медленный двигатель будет производить большее смещение. Это может существенно повлиять на восприятие вибрации. Например, мы можем использовать наш Быстрый Оценщик Вибрации (справа) для расчета смещения от двух двигателей одинаковой амплитуды, но с очень разными скоростями.
Как Uni Vibe ™ 324-102, так и Uni Vibe ™ 310-114 имеют типичные нормализованные амплитуды 6 G, но 324-102 рассчитан на 2 800 об / мин, а 310-114 рассчитан на 12 000 об / мин.Вводя эти данные в оценщик с целевой массой 100 г, мы видим, что 324-102 создает смещение 0,684 мм, а 310-114 создает только 0,037 мм. Это только теоретические модели, и фактическая разница очень мала, но для сравнения 324-102 создает гораздо большее смещение, которое пользователь, вероятно, заметит.
Влияние скорости на амплитуду
В ротационной системе взаимосвязь между скоростью двигателя и амплитудой вибрации не линейная, а экспоненциальная, это ясно показано в следующем уравнении.{2}
$Здесь m – это масса эксцентрического груза, r – это «эксцентриситет», а последний элемент ω (омега) – это скорость вращения в радианах в секунду.
Номинальное процентное увеличение скорости двигателя приведет к большему увеличению амплитуды. Теоретически это означает, что мы можем повлиять на значительные изменения, внося относительно небольшие изменения в скорость двигателя.
Изменение ERM, в частности, его веса или эксцентриситета, является еще одним способом изменения интенсивности вибрации.Однако это, очевидно, гораздо менее гибко, поскольку оно устанавливается во время производства и не может быть изменено «на лету».
Связь между скоростью и частотой
Для вибрационных двигателей ERM скорость двигателя и частота вибрации представляют собой одно и то же.
Скорость двигателя – это просто количество оборотов в минуту (об / мин), а частота вибрации выражается в герцах (Гц) и представляет собой количество колебаний в секунду. Чтобы преобразовать Гц в число оборотов в минуту, мы просто умножаем его на 60, так как в каждой минуте 60 секунд.Аналогично, чтобы преобразовать число оборотов в минуту в Гц, мы делим на 60.
Как изменить скорость
Чтобы контролировать скорость двигателя, нам просто нужно отрегулировать управляющее напряжение. Повышенное напряжение означает, что двигатель может выдавать больший крутящий момент, а поскольку нагрузка фиксирована, скорость увеличивается.
Для надежной и стабильной работы двигателя рекомендуемый диапазон управляющего напряжения определяется двумя спецификациями. Минимальное напряжение для запуска двигателя определяется максимальным пусковым напряжением.Может показаться странным использование максимального значения для определения минимального напряжения, но это не зря объясняется в этом сообщении в блоге. Хотя возможно, что двигатель может работать ниже этого напряжения, это не гарантируется, и характеристики двигателя могут быть менее надежными.
4 важных напряжения для вибрационных двигателей
Верхний предел напряжения – это максимальное номинальное рабочее напряжение. Важно избегать выхода двигателя за пределы его максимального номинального рабочего напряжения, поскольку это может привести к его повреждению.Лучше не превышать номинальное напряжение в течение длительного периода времени – такие значения, как максимальный рабочий ток, могут быть неточными, если двигатель превышает это значение, а увеличение скорости (и тока) приводит к более быстрому износу щеток и сокращению срока службы двигателя. . Обе эти и другие спецификации можно найти в соответствующих листах технических данных.
В зависимости от вашей схемы и приложения существует множество способов изменить подаваемое напряжение, однако наиболее распространенным методом является использование ШИМ-управления.Другие методы включают использование базового линейного делителя напряжения или специальных драйверов двигателя. Фактически, некоторые драйверы, такие как DRV2605, содержат библиотеки сигналов, например «Щелчки» и «нарастания», которые автоматически управляют напряжением привода за вас. Интересно, что при использовании аккумулятора в качестве нерегулируемого источника питания вы обычно будете видеть снижение управляющего напряжения по мере разряда аккумулятора, что затем приводит к падению скорости.
Изменение скорости бесщеточного вибрационного двигателя постоянного тока зависит от используемого драйвера.Например, 910-101 имеет встроенный драйвер, который принимает переменное напряжение, но не работает с ШИМ. Наоборот, оценочная плата M10-400 использует драйвер DRV11873, который принимает сигнал ШИМ.
Приемы тактильного вождения
Регулировка управляющего напряжения влияет не только на предельную скорость двигателя, но и на то, как быстро он ее достигает. Это открывает мир тактильной обратной связи и специальных приемов вождения, разработанных для того, чтобы эффекты вибрации казались «более четкими».Если вы не используете такие эффекты, как «щелчки» или «пульсация», для передачи информации пользователю, вы можете пропустить этот раздел.
Поскольку приложенное напряжение в конечном итоге определяет выходную мощность двигателя, мы знаем, что более высокое напряжение заставит двигатель вращаться с более высокой скоростью. Отсюда следует, что более высокое напряжение также приведет к более быстрому запуску двигателя, поскольку у него больше мощности, чтобы преодолеть инерцию эксцентриковой массы.
Метод «Overdrive» применяет более высокое напряжение, чем номинальное напряжение, чтобы дать двигателю дополнительную мощность и ускорить запуск, прежде чем быстро упадет до номинального напряжения, чтобы двигатель не был поврежден.Идеальное тактильное устройство не должно иметь задержки и мгновенно начать вибрировать с желаемой амплитудой (в зависимости от приложенного напряжения).
Динамический отклик вибрационного двигателя
График выше показывает, сколько времени требуется двигателю для запуска и остановки. Время задержки показывает, насколько быстро вибрационный двигатель достигает 0,08 G, время нарастания составляет от пуска до 50% типичной амплитуды для данного напряжения, а время останова – это время, необходимое двигателю для остановки работы при заданном напряжении.
Когда мы увеличиваем управляющее напряжение, наблюдается очень четкое падение времени запаздывания и нарастания, но точно так же увеличивается время остановки из-за увеличения количества движения массы.«Активное торможение» является противоположностью перегрузке, когда полярность управляющего напряжения инвертируется. Это заставляет двигатель двигаться в противоположном направлении, эффективно действуя как «тормоз». Уменьшение времени остановки – важная часть для получения четкого тактильного эффекта.
См. Дополнительную информацию по его теме в разделе «Улучшение тактильной характеристики» нашего контента для тактильных отзывов.
Трудности прогнозирования амплитуды и частоты колебаний
Как и в случае с большинством теоретических моделей, могут возникнуть проблемы при попытке предсказать реальную амплитуду вибрации на основе изменения напряжения.В этом случае есть три основные причины, по которым измеренное значение амплитуды может отличаться от нашей оценки.
Нелинейное поведение напряжения / скорости
Удвоение напряжения не обязательно увеличивает скорость вдвое. Некоторые двигатели имеют высокое пусковое напряжение и очень ровную зависимость напряжение / скорость, в то время как другие имеют очень низкое пусковое напряжение, но могут не иметь линейной зависимости.
Как правило, для прогнозирования скорости требуются дополнительные уравнения и знание констант двигателя постоянного тока, что выходит за рамки данного бюллетеня по применению.Кроме того, это обычно не требуется, так как характеристики двигателя в диапазоне напряжений можно найти в наших таблицах данных (обсуждаемых ниже).
Производственный допуск
Даже при доступе к указанной выше информации (постоянные двигателя и т. Д.) Существуют допуски при производстве двигателей, и два двигателя из одной партии могут вести себя не одинаково. Между партиями разница может быть еще больше.
Обратите внимание, что в разделе «Эксплуатационные характеристики» технических характеристик к номинальной скорости прилагается значение допуска.Как мы описали выше, изменение скорости оказывает определенное влияние на амплитуду вибрации.
Неточности измерения
Приведенные выше уравнения основаны на упрощенной модели с ограниченными степенями свободы. На самом деле вибрационный двигатель имеет несколько режимов вибрации с разными скоростями / амплитудами, а также необходимо учитывать монтажный материал и технику (особенно жесткость).
Таким образом, хотя они полезны для объяснения теории того, как напряжение влияет на скорость и амплитуду, их нельзя использовать для очень точных прогнозов.Однако при необходимости их можно использовать для общих оценок.
К счастью, вам не нужно рассчитывать амплитуду или частоту вибрации для наших двигателей ERM – мы уже сделали эту работу за вас. Наши таблицы данных включают в себя графики типичных характеристик производительности, которые показывают колебательное напряжение в зависимости от амплитуды, частоты, эффективности и потребляемого тока вибрации.
График ниже для модели 307-103, где мы можем видеть (слегка) нелинейную зависимость напряжения / частоты и гораздо более выраженную нелинейность с амплитудой вибрации:
307-103 Вибрация Характеристики двигателя
Двигатели под заказ
Конечно, изменение управляющего напряжения – не единственный способ изменить скорость двигателя или амплитуду вибрации, есть две общие области настройки, которые могут повлиять на характеристики двигателя.
Мы ранее обсуждали процесс разработки нестандартных эксцентриковых масс и их влияние на производительность в Информационном бюллетене 027: Параметры эксцентриковых масс для вибрационных двигателей. По сути, конструкция массы может влиять на нагрузку двигателя постоянного тока и, следовательно, влиять на соотношение напряжение / скорость двигателя.
Кроме того, можно предоставить двигатели постоянного тока с индивидуальными электрическими и / или механическими характеристиками, например, перемотать их на другое номинальное напряжение.Двигатели постоянного тока также бывают различных форм-факторов, что может ограничивать выбор некоторых вариантов конструкции. Например, 308-103 может позволить себе иметь эксцентрическую массу увеличенного размера для дополнительной амплитуды, но это невозможно для инкапсулированных или монетных вибрационных двигателей.
Обе эти настройки позволяют создавать различные профили для балансировки размера двигателя, скорости, напряжения и нагрузки – комбинация которых дает нам различные продукты для вибрационных двигателей, адаптированные для различных приложений.
Заключение
Мы можем легко манипулировать напряжением возбуждения, чтобы регулировать скорость двигателя и, в свою очередь, изменять амплитуду и частоту вибрации. Мы также объяснили, что амплитуда и частота вибрации связаны и не могут контролироваться независимо с помощью напряжения, потому что они оба зависят от скорости.
Мы видели, что зависимость между амплитудой вибрации и частотой (и, следовательно, скоростью) не является линейной, и мы также показали, что может быть трудно предсказать реальную амплитуду колебаний по изменению напряжения.Однако графики типичных рабочих характеристик прецизионных микроприводов значительно упрощают этот процесс и позволяют определять (типичное) поведение двигателей при заданном напряжении.
Кроме того, изменение напряжения может повлиять на то, как быстро двигатель начинает вращаться, а не только на его предельную скорость. По этой причине можно использовать напряжение для улучшения тактильных эффектов и производительности двигателя.
Убедившись, что управляющее напряжение находится между максимальным пусковым напряжением и максимальным номинальным рабочим напряжением, мы можем гарантировать долговечность и надежность двигателя.Чтобы выбрать правильный двигатель, вам может быть полезно наше Руководство по сравнению вибрационных двигателей.
Минимизация вибрации шагового двигателя
Шаговые двигатели вибрируют. Это то, чем они занимаются. Чтобы свести к минимуму вибрацию, сначала нужно понять, откуда они берутся.
Шаговый двигатель обеспечивает точное управление положением без помощи энкодера, комбинируя небольшие “шаги” определенного угла поворота. Однако между ступенями они проявляют крошечные колебания.Хотя большую часть времени вибрацию нельзя наблюдать, она действительно превращается в шум, который может усиливаться другими механизмами, подключенными к двигателю. Прежде чем пытаться устранить проблему, важно понять источник вибрации.
Как вы можете видеть на видео выше, вибрация незаметна. Однако, если вы посмотрите на это под микроскопом, это на самом деле покажет, что вал двигателя действительно выходит за пределы допустимого диапазона на каждом шаге.В следующем видео мы используем 5-фазный шаговый двигатель 0,72 °, чтобы продемонстрировать его характеристики одноступенчатой вибрации и почему шаговый двигатель работает более плавно на более высоких скоростях.
Внутри шагового двигателя есть крошечный воздушный зазор между ротором и статором, в котором протекает магнитный поток, и единственное трение, которое существует, – это шарикоподшипник. Когда двигатель получает команду двигаться и останавливаться, в шарикоподшипнике недостаточно трения, чтобы остановить выбег. Это означает, что вал двигателя выходит за пределы допустимого диапазона на каждом шаге, а затем из-за инерционных сил.Время, необходимое валу двигателя или ротору, чтобы остановить это перерегулирование или занижение, называется «временем установления».
Бывают случаи, когда вибрация, вызванная ступенями, становится достаточно большой, чтобы вызвать пропущенные шаги или чрезмерный шум, например, при работе на резонансной частоте. Резонансная частота определяется соотношением между жесткостью крутящего момента и инерцией, и изменение любого параметра может сместить резонансную частоту за пределы рабочего диапазона, чтобы улучшить характеристики.
В следующем видео мы покажем, как измеряется вибрация и как она изменяется с разной скоростью.
Хотя полностью устранить вибрацию от шагового двигателя может быть невозможно, существует много способов решить эту проблему как механически, так и электрически.
В этом посте мы обсудим наиболее распространенные и эффективные методы снижения вибрации .
| Механические методы снижения вибрации |
Сначала мы рассмотрим наиболее распространенные механические методы уменьшения вибрации в шаговых двигателях.
1. Установите механический чистый демпфер.
Самый простой способ уменьшить вибрацию – установить чистый демпфер на задний вал двигателя. Чистые демпферы – это в основном герметичные пластиковые корпуса с инерционным корпусом, заполненным силиконовым гелем. Дополнительная инерция и силиконовый гель помогают поглощать вибрацию и обеспечивают стабильный демпфирующий эффект.
2.Используйте шаговый двигатель с высоким разрешением.
Некоторые производители двигателей предлагают шаговые двигатели с увеличенным числом зубьев ротора (100 вместо 50). Увеличенное количество зубцов удваивает разрешение полного шага и помогает уменьшить амплитуду вибрации, поскольку двигатель теперь перемещается на меньшее расстояние с каждым шагом. Это означает, что стандартный 2-фазный шаговый двигатель 1,8 ° становится двигателем 0,9 °, а стандартный 5-фазный шаговый двигатель 0,72 ° становится двигателем 0,36 °. Еще более высокое разрешение может быть достигнуто с помощью зубчатой передачи или микрошага, которые также описаны ниже.
В качестве дополнительного преимущества ротор со 100 зубьями также увеличивает точность положения остановки двигателя для приложений точного управления положением, как показано на видео ниже. |
3. Используйте 5-фазный шаговый двигатель.
Подобно шаговым двигателям с высоким разрешением, 5-фазный шаговый двигатель 0,72 ° также может обеспечить более точное разрешение полного шага и снизить вибрацию по сравнению с 2-фазным 1.Шаговый двигатель 8 °. По сравнению с двухфазным двигателем, пятифазный двигатель имеет такой же ротор, но 10 полюсов статора вместо 8. Это увеличивает разрешение полного шага с 200 до 500 шагов на оборот. Важно отметить, что точность положения остановки зависит от количества зубцов (а не от разрешения), поэтому двухфазные или 5-фазные (0,9 ° или 0,36 °) двигатели с высоким разрешением по-прежнему обеспечивают лучшую точность остановки по сравнению со стандартными 2 -фазные или 5-фазные (1,8 ° или 0,72 °) двигатели.
Узнайте больше о 5-фазных шаговых двигателях. |
4. Используйте шаговые двигатели с редуктором.
Редуктор обычно используется для увеличения крутящего момента при снижении скорости двигателя, но повышенная жесткость может помочь подавить передачу вибрации от двигателя к нагрузке, трение зубчатого колеса может помочь уменьшить перерегулирование и недорегулирование, а его постоянный выходной крутящий момент может обеспечить более стабильную операция.
- Собственная вибрация двигателя может быть уменьшена в соответствии с передаточным числом.
- Можно избежать диапазона вибрации на низких скоростях, поскольку двигатель вращается с более высокими скоростями.
без редуктора | с редуктором |
Узнайте больше о роли и различных типах редукторов для шаговых двигателей. |
5.Выполните тщательный расчет двигателя.
Для определения размера двигателя необходимо найти ту «золотую середину», в которой двигатель может комфортно работать. Ошибочно пытаться подобрать двигатель по его максимальным характеристикам. Например, кривая скорость-крутящий момент шагового двигателя показывает, где двигатель остановится, поэтому точно не рекомендуется подбирать двигатель в соответствии с этими характеристиками. Также важно не слишком увеличивать размер двигателя, так как чрезмерный крутящий момент может увеличить количество вибрации.Если вы увеличиваете размер шагового двигателя, вы можете уменьшить чрезмерный крутящий момент, уменьшив ток двигателя (подсказка: ток пропорционален крутящему моменту).
Инерция определяется как сопротивление объекта изменению скорости и часто игнорируется. При выборе передаточного числа обращайте внимание на то, чтобы не превышать рекомендуемое «передаточное число». Для выключенного шагового двигателя коэффициент инерции рассчитывается путем деления общей инерции нагрузки на инерцию ротора. Для мотор-редукторов его коэффициент инерции рассчитывается путем деления общей инерции нагрузки на момент инерции ротора на квадрат передаточного числа.
Выполнение тщательного анализа требований к двигателю и обеспечение соответствующих коэффициентов безопасности там, где это необходимо, может только помочь гарантировать долгосрочную работу. Многие производители предлагают программное обеспечение для определения размеров, чтобы упростить этот процесс.
Попробуйте наш инструмент для выбора двигателя, чтобы быстро оценить крутящий момент, инерцию нагрузки и требования к скорости. СОВЕТ : после расчета выполните расширенный поиск , чтобы найти подходящие двигатели, или |
Помимо двигателя, в машине могут быть и другие компоненты, которые также создают вибрацию. В некоторых случаях вибрация шагового двигателя может быть усилена внешними механизмами, подключенными к двигателю. Убедитесь, что ничего не болтается, и при необходимости используйте резиновые втулки для снижения шума.
| Электрические методы снижения вибрации |
Есть несколько способов уменьшить вибрацию электрически (или с помощью драйвера).
1. Используйте микрошаговый драйвер
Традиционно наиболее рекомендуемым методом является микрошаг. Микрошаг достигается за счет разделения тока двигателя между фазами, и это делается с помощью драйвера. Благодаря микрошагу способность водителя точно контролировать крутящий момент и положение значительно влияет на его способность уменьшать пульсации крутящего момента, вибрацию и слышимый шум. Непостоянный фазный ток увеличивает вибрацию из-за неравномерности шагов или крутящего момента. Если драйвер не может точно регулировать ток или обеспечивать однородную форму волны тока, двигатель будет вибрировать независимо от того, насколько хорошо он сделан.
В следующем видео показано, как работает микрошаг.
Однако во многих случаях вибрацию во всех диапазонах скоростей невозможно устранить одним микрошагом.
2. Используйте драйвер, который устраняет вибрации независимо
Биполярные драйверы прерывателя постоянного тока CVDOriental Motor (из серии CVK) разработаны специально для обеспечения низких характеристик вибрации во всех диапазонах скоростей за счет независимой обработки каждого типа вибрации.Благодаря отдельным детекторам фазного тока эти драйверы могут очень хорошо регулировать ток и обеспечивать очень однородную форму тока.
По сравнению с традиционным методом настройки тока двигателя с помощью аналогового потенциометра, драйверы CVD используют цифровое управление током. Благодаря лучшему регулированию тока повышается и точность остановки двигателя. Хотя мы указываем точность положения упора на уровне +/- 0,05 °, в действительности двигатель работает намного лучше даже во время микрошага.
Драйверы CVD обрабатывают каждый тип вибрации по-разному. Вот 3 основных типа колебаний , которые демонстрируют шаговые двигатели.
- Вибрация на низкой скорости (около 0 ~ 50 об / мин из-за шагового движения
- Вибрация на средних оборотах (около 50 ~ 200 об / мин) вызвана отклонением крутящего момента или резонансной частотой
- Высокоскоростная вибрация (около 500 об / мин и выше) вызвана противо-ЭДС и нестабильностью регулирования постоянного тока.
Драйверы CVD имеют уникальную функцию постоянного микрошага Smooth Drive , которая обеспечивает производительность микрошага с контролем полного шага. При активации драйвер будет внутренним микрошагом двигателя (2048 шагов на полный шаг 1,8 °), в то время как контроллер подает импульсы с разрешением полного шага. Эта функция Smooth Drive, изначально разработанная как способ уменьшить нагрузку на генератор импульсов, снижает вибрацию во всех диапазонах скоростей, но особенно в диапазоне низких скоростей от 0 до 50 об / мин.Также в драйвер встроена функция коррекции фазы тока возбуждения , которая снижает вибрацию в диапазоне скоростей от 50 до 200 об / мин за счет оптимизации векторов крутящего момента. Это снижает как пульсацию крутящего момента, так и резонанс. Кроме того, регулятор компенсации тока снижает вибрацию при 500 об / мин и выше за счет использования данных двигателя и уникального алгоритма, который может быть предложен только производителем, который проектирует и двигатель, и драйвер.
Для получения дополнительной информации о технологиях подавления вибрации в драйвере CVD серии CVK просмотрите следующее видео и обратитесь к официальному документу для получения дополнительной информации.
Основные советы по поиску и устранению неисправностей, связанных с вибрацией двигателя
Поскольку причин вибрации машины очень много, часто бывает трудно локализовать основную проблему. Большинство процессов поиска и устранения неисправностей основаны на передовых методах диагностики и приводят к демонтажу оборудования для достижения полного решения. Тем не менее, вы можете выполнить следующие базовые проверки без дорогостоящего оборудования, чтобы определить собственную частоту, активный фундамент и проблемы общего дисбаланса – все это может вызвать чрезмерную вибрацию, и этого следует по возможности избегать.
Визуальная проверка фундамента машины
Фундамент машины играет важную роль в уровне вибрации установленного оборудования. Жесткий и массивный фундамент ( Фото 1 ) идеален, поскольку он сводит к минимуму фоновую вибрацию, наблюдаемую на двигателе или другом оборудовании. Массивный фундамент менее активен, а это означает, что он ограничивает общее движение системы и, следовательно, уровень вибрации машины из-за ее собственной массы и жесткости.Хотя предпочтение отдается жесткому и массивному фундаменту, это, к сожалению, не является правилом. В большинстве случаев невозможно использовать идеальный фундамент из-за места, стоимости или некоторых других переменных. Чаще всего установка будет иметь неидеальный фундамент и, соответственно, более чем идеальную вибрацию ( Фото 2 ). Если вы подозреваете, что фундамент является проблемой, вы можете выполнить дополнительные проверки, чтобы убедиться в этом. Проверка фоновой вибрации и уровней вибрации стопы, а также испытания на удар могут помочь решить, является ли фундамент основной причиной вашей проблемы.
Тест на активную или гибкую основу
В соответствии со стандартом NEMA MG-1 (двигатели и генераторы), активный фундамент допускает чрезмерное перемещение и передачу внешней вибрации на машину, в то время как жесткий (негибкий) фундамент ограничивает вибрацию у опор – и не допускает чрезмерной передачи вибрация машины в окружающую конструкцию. Используйте следующие два теста, чтобы определить, существует ли активный и / или гибкий фундамент.
Активная проверка фундамента – Измерьте уровень фоновой вибрации в том же месте, которое использовалось для измерения вибрации корпуса подшипника механизма во время работы.Затем проведите испытание на вибрацию корпусов подшипников машинного оборудования, отключив все компоненты поезда. Если общие уровни вибрации, которые вы измеряете на корпусах подшипников, когда оборудование не работает, на 25% или выше, чем соответствующие рабочие уровни вибрации, то вы имеете дело с активным фундаментом. Эта проверка может быть несколько субъективной, потому что чрезмерная рабочая вибрация может замаскировать плохой фундамент – потому что уровень фоновой вибрации может не соответствовать критериям 25%, но все же может быть чрезмерным.В этих случаях следуйте этому общему правилу: если общий уровень вибрации в корпусах подшипников превышает общий пик 0,030 дюйма в секунду (при неработающем оборудовании), может потребоваться дальнейшее расследование.
Проверка гибкого фундамента – На машине, работающей в любой конфигурации, измерьте общие уровни вибрации в корпусах подшипников, а также в опорах двигателя по как можно большему количеству осей. Сравните общую вибрацию, измеренную на каждой оси корпуса подшипника, с общей вибрацией, измеренной на каждой соответствующей оси соседней опоры.Если общие уровни, измеренные у основания, на 25% или выше, чем уровни, измеренные на той же оси на соседнем корпусе подшипника, то фундамент считается гибким. Как и в случае фоновой вибрации, критерий 25% может быть неточным в зависимости от уровней, наблюдаемых во время тестирования. Еще раз, пиковое значение 0,030 дюйма в секунду – хорошее практическое правило.
Проверьте установку машины
Способ крепления машины к фундаменту так же важен, как и сам фундамент.Асинхронные двигатели обычно поставляются с инструкциями по эксплуатации, чтобы обеспечить безопасность машины в соответствии с рекомендациями производителя. Несоблюдение этих рекомендаций может привести к проблемам с вибрацией.
- Болт – Одним из самых основных элементов при установке двигателя являются болты, используемые для крепления двигателя к фундаменту через опоры двигателя. Хотя они простые по своей природе, они, как правило, проблематичны. Убедитесь, что размер болтов соответствует рекомендациям производителя, и убедитесь, что все болты крепления ножек затянуты надлежащим образом.Если какой-либо из монтажных болтов можно повернуть вручную, проверьте и проверьте всю установку, прежде чем продолжить.
- Прокладки – Прокладки, еще один довольно простой элемент, который часто приводит к ряду проблем, предназначены для коррекции мягкости опоры (см. Обсуждение ниже), а также для регулировки выравнивания машины. Прокладки должны покрывать как можно большую часть поверхности опоры (, фото 3 ) и быть настолько толстыми, насколько это возможно, в соответствии с требованиями, обеспечивая использование наименьшего количества прокладок.Выбор прокладок, которые слишком малы для области опоры двигателя, приведет к тому, что двигатель будет иметь плохую опору (, фото 4 ). Использование слишком большого количества прокладок может привести к проблеме вибрации, подобной проблеме с мягкой опорой, известной как «губчатая опора», когда опора становится упругой из-за недостаточной жесткости опоры (аналогично листовой рессоре в автомобиле). Это приведет к чрезмерному движению пораженной стопы.
- Мягкая лапа – Мягкая лапа может оказывать большое влияние на вибрацию асинхронного двигателя.Хотя любой двигатель может быть поврежден, двухполюсные машины особенно уязвимы для проблем с мягкой ногой из-за эксцентрических электромагнитных сил в воздушном зазоре их конструкции. Выполните проверку статической мягкой опоры в рамках установки и выравнивания машины.
Проверьте статическую мягкую опору, сначала затянув все крепежные болты опоры до требуемого уровня крутящего момента, указанного производителем. Затем, начиная с любой ноги, поставьте тысячные (0.001 дюйм) циферблатного индикатора вертикально на поверхности опоры рядом с местом для болта, оставляя достаточно места для ослабления болта гаечным ключом подходящего размера ( Рис. 1 ). Обнулите индикатор и начинайте ослаблять болт. Если значение на циферблатном индикаторе увеличивается с нуля, обратите внимание на величину изменения – это количество присутствующей мягкой лапы.
У каждого производителя могут быть свои критерии мягкости стопы, поэтому следуйте этим конкретным значениям. Если возможно, держите все уровни мягкости стопы на уровне менее одной тысячной (0.001 дюйм). Если присутствует мягкая ножка, исправьте ее, установив соответствующие прокладки. Пока болт ослаблен (и до установки регулировочных шайб), рекомендуется взять щуп и проверить весь периметр опоры, насколько это возможно. Это поможет вам убедиться, что ступня плоская, не скошена и не деформирована. Если опора не плоская, может потребоваться сложная установка регулировочных шайб. После того, как ножка будет правильно установлена, повторите проверку циферблатного индикатора, чтобы проверить, насколько мягкая ножка присутствует после исправления.Если исправление прошло успешно, надлежащим образом затяните болт крепления ножки. Проверьте следующую ножку, повторяя процесс до тех пор, пока вы не проверите и не отрегулируете все монтажные ножки, если необходимо.
Определение критических скоростей вращения ротора и собственных частот системы
Проверка критических скоростей ротора и собственных частот системы может быть сложной. После того, как вы убедитесь, что они существуют, следующие проблемы станут одними из самых сложных.
- Критическая скорость ротора – Вы можете использовать испытание на выбеге для определения собственных частот системы, но этот подход чаще всего используется для определения критических скоростей ротора.За очень редкими исключениями, критические скорости ротора являются проблемой только при работе с некоторыми 2-полюсными (а иногда и 4-полюсными) роторами. Подозревают проблемы с критической скоростью ротора, когда присутствуют высокие уровни амплитуды вибрации, равной «однократной скорости вала» (1 × об / мин), и балансировка была ограничена или не имела успеха. Хотя для этого теста можно использовать данные о вибрации корпуса подшипника, данные бесконтактного датчика вала позволяют повысить точность. Запишите данные об амплитуде вибрации и фазовом угле 1 × об / мин с момента, когда машина находилась на скорости холостого хода до тех пор, пока вал не перестал вращаться (данные записываются с шагом 10 об / мин), и нанесите эти данные на диаграмму Боде или полярную диаграмму.Рекомендуется, чтобы критическая скорость ротора не превышала 15% от рабочей скорости для односкоростных машин. Пользователи машин, работающих с приводами с регулируемой скоростью, критическая скорость которых находится в пределах их рабочего диапазона, должны проконсультироваться с производителем для получения возможных рекомендаций.
Обратите внимание, что вы также можете использовать тестирование на выбег, чтобы определить, является ли проблема вибрации асинхронного двигателя электрической или механической по своей природе. Контролируйте уровни вибрации до, во время и сразу после отключения питания двигателя.Если вибрация прекращается или резко уменьшается почти сразу, проблема обычно связана с электричеством.
- Собственные частоты / ударное испытание – Собственные частоты системы также могут быть весьма проблематичными, если они совпадают с частотами форсирования системы. Подозревайте, что проблема такого типа возникает, когда вибрация по одной оси намного выше, чем по другой – или когда кажется, что вибрация не затронута, независимо от выполненных корректировок. Наилучшие данные для определения собственной частоты системы предоставляются с помощью двухканальных испытаний на удар с использованием модального молотка и датчика вибрации.Такое тестирование позволяет получить частотную характеристику с фазовыми данными. Добавление фазовых данных полезно, потому что это позволяет лучше определить, присутствует ли собственная частота в системе, путем сравнения не только амплитуды, но и фазового сдвига.
Вы можете протестировать горизонтальные машины в нескольких местах (нажмите здесь, чтобы увидеть Рис. 2 ). Эти местоположения могут быть изменены в зависимости от необходимости, сосредоточив внимание на местах, где, как известно, существует проблема, или путем увеличения местоположений, чтобы включить другие измерения, такие как обшивка рамы, кронштейны подшипников, опоры оборудования или установочные салазки.Горизонтальные двигатели, оснащенные подшипниками скольжения, должны подвергаться испытаниям корпуса подшипников или кронштейнов в условиях медленного качения (от 200 до 300 об / мин), чтобы два кронштейна не соединялись валом. Если оставить в неподвижном состоянии, возникшее в результате искусственное усиление приведет к ошибочным результатам. Горизонтальные двигатели, оборудованные подшипниками качения, не подвержены этому воздействию, и их корпуса подшипников или кронштейны могут испытываться на удар в состоянии покоя.
У вертикальных машинесть два основных места, на которые следует ориентироваться при испытаниях на удар, которые соответствуют частоте язычкового или естественного качания.Оба эти места находятся на самом верхнем кронштейне, фланце или элементе рамы машины, причем оба измерения ортогональны (90 °) друг другу. Для удобства, это может быть с основной свинцовой коробочкой и 90 ° от главной ведущей коробки или с выпускным трубопроводом и 90 ° выпускного трубопровода (чтобы увидеть Рис нажмите здесь. 3 ). Разделение на 90 ° важно для этого испытания, потому что внешнее оборудование, коробки, трубопроводы и т. Д. Могут иметь большое влияние на собственную частоту. Для проверки частоты язычков ротор не должен вращаться.
Как правило, не должно быть собственных частот в пределах ± 15% от половинной рабочей скорости, однократной рабочей скорости, двукратной рабочей скорости, однократной частоты сети и двукратной частоты сети – хотя некоторые пользователи могут иметь разные требования. Работа привода машин с регулируемой скоростью может сделать исключение собственных частот непрактичным. Проблемы с собственной частотой обычно трудно исправить, если даже это практически возможно, потому что изменение частоты язычков в системе может потребовать переделки фундамента.
Проверка полумуфты и шпоночного паза вала двигателя
Частая причина механического дисбаланса при пуске двигателя связана с неправильной подгонкой шпонок в ступицах муфты. При идеальной установке шпонки используется полная шпонка для той части вала, где расположена ступица муфты, а затем переходная шпонка в полушпонку ( Фото 5 ). Использование полной тональности, которая не опускается до половины, создаст большой механический дисбаланс (, фото 6, ). Для достижения наилучших результатов всегда следуйте рекомендациям производителя.
Даже несмотря на то, что причины вибрации двигателя кажутся почти бесконечными, с помощью нескольких простых проверок и любознательного отношения можно свести к минимуму риск при запуске двигателя и поезда и максимально повысить общую надежность оборудования.
Хамм – сервисный инженер, а Эванс – старший инженер-испытатель в TECO Westinghouse, Round Rock, Texas. С ними можно связаться по телефону (512) 255-4141.
Сравнение анализа вибрации и тока статора для обнаружения неисправностей подшипников в асинхронных приводах
% PDF-1.4 % 1 0 obj > endobj 9 0 объект /Заглавие /Предмет / Автор /Режиссер / Ключевые слова / CreationDate (D: 20210203215834-00’00 ‘) / ModDate (D: 201
162930 + 01’00 ‘) >> endobj 2 0 obj > endobj 3 0 obj > endobj 4 0 obj > endobj 5 0 obj > endobj 6 0 obj > ручей application / pdf
