
Регулятор оборотов коллекторного двигателя без потерь
 Для выполнения многих видов работ по обработке древесины, металла или других типов материалов требуются не высокие скорости, а хорошее тяговое усилие. Правильнее будет сказать – момент. Именно благодаря ему запланированную работу можно выполнить качественно и с минимальными потерями мощности. Для этого в качестве приводного устройства применяются моторы постоянного тока (или коллекторные), в которых выпрямление питающего напряжения осуществляется самим агрегатом. Тогда для достижения требуемых рабочих характеристик необходима регулировка оборотов коллекторного двигателя без потери мощности.
Для выполнения многих видов работ по обработке древесины, металла или других типов материалов требуются не высокие скорости, а хорошее тяговое усилие. Правильнее будет сказать – момент. Именно благодаря ему запланированную работу можно выполнить качественно и с минимальными потерями мощности. Для этого в качестве приводного устройства применяются моторы постоянного тока (или коллекторные), в которых выпрямление питающего напряжения осуществляется самим агрегатом. Тогда для достижения требуемых рабочих характеристик необходима регулировка оборотов коллекторного двигателя без потери мощности.
Особенности регулирования скорости
Важно знать, что каждый двигатель при вращении потребляет не только активную, но и реактивную мощность. При этом уровень реактивной мощности будет больше, что связано с характером нагрузки. В данном случае задачей конструирования устройств регулирования скорости вращения коллекторных двигателей является уменьшение разницы между активной и реактивной мощностями. Поэтому подобные преобразователи будут довольно сложными, и самостоятельно их изготовить непросто.
Своими руками можно сконструировать лишь некоторое подобие регулятора, но говорить о сохранении мощности не стоит. Что такое мощность? С точки зрения электрических показателей, это произведение потребляемого тока, умноженное на напряжение. Результат даст некое значение, которое включает активную и реактивную составляющие. Для выделения только активной, то есть сведения потерь к нулю, необходимо изменить характер нагрузки на активную. Такими характеристиками обладают только полупроводниковые резисторы.
Следовательно, необходимо индуктивность заменить на резистор, но это невозможно, потому что двигатель превратится во что-то иное и явно не станет приводить что-либо в движение. Задача регулирования без потерь заключается в том, чтобы сохранить момент, а не мощность: она все равно будет изменяться. Справиться с подобной задачей сможет только преобразователь, который будет управлять скоростью за счёт изменения длительности импульса открытия тиристоров или силовых транзисторов.
Обобщенная схема регулятора
 Примером регулятора, который осуществляет принцип управления мотором без потерь мощности, можно рассмотреть тиристорный преобразователь. Это пропорционально-интегральные схемы с обратной связью, которые обеспечивают жесткое регулирование характеристик, начиная от разгона-торможения и заканчивая реверсом. Самым эффективным является импульсно-фазовое управление: частота следования импульсов отпирания синхронизируется с частотой сети. Это позволяет сохранять момент без роста потерь в реактивной составляющей. Обобщенную схему можно представить несколькими блоками:
Примером регулятора, который осуществляет принцип управления мотором без потерь мощности, можно рассмотреть тиристорный преобразователь. Это пропорционально-интегральные схемы с обратной связью, которые обеспечивают жесткое регулирование характеристик, начиная от разгона-торможения и заканчивая реверсом. Самым эффективным является импульсно-фазовое управление: частота следования импульсов отпирания синхронизируется с частотой сети. Это позволяет сохранять момент без роста потерь в реактивной составляющей. Обобщенную схему можно представить несколькими блоками:
- силовой управляемый выпрямитель;
- блок управления выпрямителем или схема импульсно-фазового регулирования;
- обратная связь по тахогенератору;
- блок регулирования тока в обмотках двигателя.
Перед тем как углубляться в более точное устройство и принцип регулирования, необходимо определиться с типом коллекторного двигателя. От этого будет зависеть схема управления его рабочими характеристиками.
Разновидности коллекторных двигателей
Известно, как минимум, два типа коллекторных двигателей. К первому относятся устройства с якорем и обмоткой возбуждения на статоре. Ко второму можно отнести приспособления с якорем и постоянными магнитами. Также необходимо определиться, для каких целей требуется сконструировать регулятор:
 Если необходимо регулировать простым движением (например, вращением шлифовального камня или сверлением), то обороты потребуется изменять в пределах от какого-то минимального значения, неравному нулю, — до максимального. Примерный показатель: от 1000 до 3000 об/мин. Для этого подойдёт упрощённая схема на 1 тиристоре или на паре транзисторов.
Если необходимо регулировать простым движением (например, вращением шлифовального камня или сверлением), то обороты потребуется изменять в пределах от какого-то минимального значения, неравному нулю, — до максимального. Примерный показатель: от 1000 до 3000 об/мин. Для этого подойдёт упрощённая схема на 1 тиристоре или на паре транзисторов.- Если необходимо управлять скоростью от 0 до максимума, тогда придется использовать полноценные схемы преобразователей с обратной связью и жёсткими характеристиками регулирования. Обычно у мастеров-самоучек или любителей оказываются именно коллекторные двигатели с обмоткой возбуждения и тахогенератором. Таким мотором является агрегат, используемый в любой современной стиральной машине и часто выходящий из строя. Поэтому рассмотрим принцип управления именно этим двигателем, изучив его устройство более подробно.
Конструкция мотора
Конструктивно двигатель от стиральной машины «Индезит» несложен, но при проектировании регулятора управления его скоростью необходимо учесть параметры. Моторы могут быть различными по характеристикам, из-за чего будет изменяться и управление. Также учитывается режим работы, от чего будет зависеть конструкция преобразователя. Конструктивно коллекторный мотор состоит из следующих компонентов:
- Якорь, на нем имеется обмотка, уложенная в пазы сердечника.
- Коллектор, механический выпрямитель переменного напряжения сети, посредством которого оно передается на обмотку.
- Статор с обмоткой возбуждения. Он необходим для создания постоянного магнитного поля, в котором будет вращаться якорь.

Организовав раздельное управление возбуждением и якорем, можно добиться высокой точности позиционирования вала двигателя, но схема управления тогда существенно усложнится. Поэтому подробнее рассмотрим регулятор, который позволяет изменять скорость вращения от 0 до максимальной величины, но без позиционирования. Это может пригодиться, если из двигателя от стиральной машины будет изготавливаться полноценный сверлильный станок с возможностью нарезания резьбы.
Выбор схемы
Выяснив все условия, при которых будет использоваться мотор, можно начинать изготавливать регулятор оборотов коллекторного двигателя. Начинать стоит с выбора подходящей схемы, которая обеспечит вас всеми необходимыми характеристиками и возможностями. Следует вспомнить их:
- Регулирование скорости от 0 до максимума.
- Обеспечение хорошего крутящего момента на низких скоростях.
- Плавность регулирования оборотов.
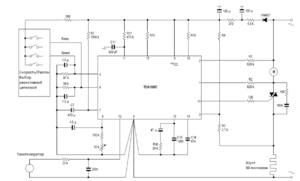
Рассматривая множество схем в интернете, можно сделать вывод о том, что мало кто занимается созданием подобных «агрегатов». Это связано со сложностью принципа управления, так как необходимо организовать регулирование многих параметров. Угол открытия тиристоров, длительность импульса управления, время разгона-торможения, скорость нарастания момента. Данными функциями занимается схема на контроллере, выполняющая сложные интегральные вычисления и преобразования. Рассмотрим одну из схем, которая пользуется популярностью у мастеров-самоучек или тех, кто просто хочет с пользой применить старый двигатель от стиральной машины.
Всем нашим критериям отвечает схема управления скоростью вращения коллекторным двигателем, собранная на специализированной микросхеме TDA 1085. Это полностью готовый драйвер для управления моторами, которые позволяют регулировать скорость от 0 до максимального значения, обеспечивая поддержание момента за счёт использования тахогенератора.
Особенности конструкции
 Микросхема оснащена всем необходимым для осуществления качественного управления двигателем в различных скоростных режимах, начиная от торможения, заканчивая разгоном и вращением с максимальной скоростью. Поэтому ее использование намного упрощает конструкцию, одновременно делая весь
Микросхема оснащена всем необходимым для осуществления качественного управления двигателем в различных скоростных режимах, начиная от торможения, заканчивая разгоном и вращением с максимальной скоростью. Поэтому ее использование намного упрощает конструкцию, одновременно делая весь
Характеристики микросхемы можно найти на официальном сайте. Мы укажем основные особенности, которые потребуются для конструирования преобразователя. К ним можно отнести: интегрированную схему преобразования частоты в напряжение, генератор разгона, устройство плавного пуска, блок обработки сигналов Тахо, модуль ограничения тока и прочее. Как видите, схема оснащена рядом защит, которые обеспечат стабильность функционирования регулятора в разных режимах.
На рисунке ниже изображена типовая схема включения микросхемы.
Схема несложная, поэтому вполне воспроизводима своими руками. Есть некоторые особенности, к которым относятся предельные значения и способ регулирования скоростью:
 Максимальный ток в обмотках двигателя не должен превышать 10 А (при условии той комплектации, которая представлена на схеме). Если применить симистор с большим прямым током, то мощность может быть выше. Учтите, что потребуется изменить сопротивление в цепи обратной связи в меньшую сторону, а также индуктивность шунта.
Максимальный ток в обмотках двигателя не должен превышать 10 А (при условии той комплектации, которая представлена на схеме). Если применить симистор с большим прямым током, то мощность может быть выше. Учтите, что потребуется изменить сопротивление в цепи обратной связи в меньшую сторону, а также индуктивность шунта.- Максимальная скорость вращения достигается 3200 об/мин. Эта характеристика зависит от типа двигателя. Схема может управлять моторами до 16 тыс. об/мин.
- Время разгона до максимальной скорости достигает 1 секунды.
- Нормальный разгон обеспечивается за 10 секунд от 800 до 1300 об/мин.
- На двигателе использован 8-полюсный тахогенератор с максимальным выходным напряжением на 6000 об/мин 30 В. То есть он должен выдавать 8мВ на 1 об/мин. При 15000 об/мин на нем должно быть напряжение 12 В.
- Для управления двигателем используется симистор на 15А и предельным напряжением 600 В.
Если потребуется организовать реверс двигателя, то для этого придется дополнить схему пускателем, который будет переключать направление обмотки возбуждения. Также потребуется схема контроля нулевых оборотов, чтобы давать разрешение на реверс. На рисунке не указано.
Принцип управления
При задании скорости вращения вала двигателя резистором в цепи вывода 5 на выходе формируется последовательность импульсов для отпирания симистора на определенную величину угла. Интенсивность оборотов отслеживается по тахогенератору, что происходит в цифровом формате. Драйвер преобразует полученные импульсы в аналоговое напряжение, из-за чего скорость вала стабилизируется на едином значении, независимо от нагрузки. Если напряжение с тахогенератора изменится, то внутренний регулятор увеличит уровень выходного сигнала управления симистора, что приведёт к повышению скорости.
Микросхема может управлять двумя линейными ускорениями, позволяющими добиваться требуемой от двигателя динамики. Одно из них устанавливается по Ramp 6 вывод схемы. Данный регулятор используется самими производителями стиральных машин, поэтому он обладает всеми преимуществами для того, чтобы быть использованным в бытовых целях. Это обеспечивается благодаря наличию следующих блоков:
 Стабилизатор напряжения для обеспечения нормальной работы схемы управления. Он реализован по выводам 9, 10.
Стабилизатор напряжения для обеспечения нормальной работы схемы управления. Он реализован по выводам 9, 10.- Схема контроля скорости вращения. Реализована по выводам МС 4, 11, 12. При необходимости регулятор можно перевести на аналоговый датчик, тогда выводы 8 и 12 объединяются.
- Блок пусковых импульсов. Он реализован по выводам 1, 2, 13, 14, 15. Выполняет регулировку длительности импульсов управления, задержку, формирования их из постоянного напряжения и калибровку.
- Устройство генерации напряжения пилообразной формы. Выводы 5, 6 и 7. Он используется для регулирования скорости согласно заданному значению.
- Схема усилителя управления. Вывод 16. Позволяет отрегулировать разницу между заданной и фактической скоростью.
- Устройство ограничения тока по выводу 3. При повышении напряжения на нем происходит уменьшение угла отпирания симистора.
Использование подобной схемы обеспечивает полноценное управление коллекторным мотором в любых режимах. Благодаря принудительному регулированию ускорения можно добиваться необходимой скорости разгона до заданной частоты вращения. Такой регулятор можно применять для всех современных двигателей от стиралок, используемых в иных целях.
220v.guru
СХЕМА РЕГУЛЯТОРА ОБОРОТОВ ДВИГАТЕЛЯ
Регулятор для двигателя переменного тока
На основе мощного симистора BT138-600, можно собрать схему регулятора скорости вращения двигателя переменного тока. Эта схема предназначена для регулирования скорости вращения электродвигателей сверлильных машин, вентиляторов, пылесосов, болгарок и др. Скорость двигателя можно регулировать путем изменения сопротивления потенциометра P1. Параметр P1 определяет фазу запускающего импульса, который открывает симистор. Схема также выполняет функцию стабилизации, которая поддерживает скорость двигателя даже при большой его нагрузке.
Принципиальная схема регулятора электромотора переменного питания
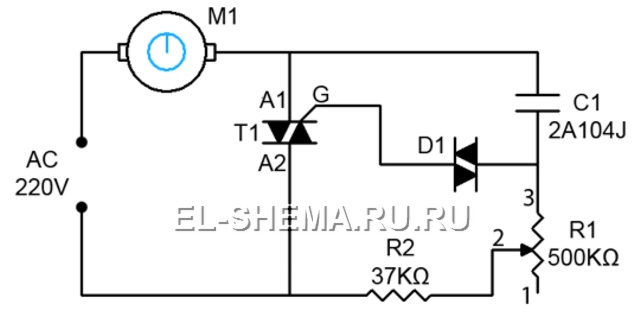
Например, когда мотор сверлильного станка тормозит из-за повышенного сопротивления металла, ЭДС двигателя также уменьшается. Это приводит к увеличению напряжения в R2-P1 и C3 вызывая более продолжительное открывание симистора, и скорость соответственно увеличивается.

Регулятор для двигателя постоянного тока
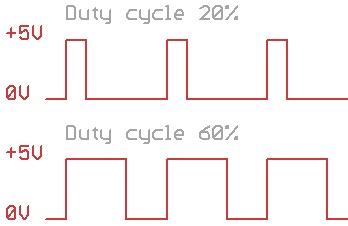
Наиболее простой и популярный метод регулировки скорости вращения электродвигателя постоянного тока основан на использовании широтно-импульсной модуляции (ШИМ или PWM). При этом напряжение питания подается на мотор в виде импульсов. Частота следования импульсов остается постоянной, а их длительность может меняться — так меняется и скорость (мощность).
Для генерации ШИМ сигнала можно взять схему на основе микросхемы NE555. Самая простая схема регулятора оборотов двигателя постоянного тока показана на рисунке:
Принципиальная схема регулятора электромотора постоянного питания
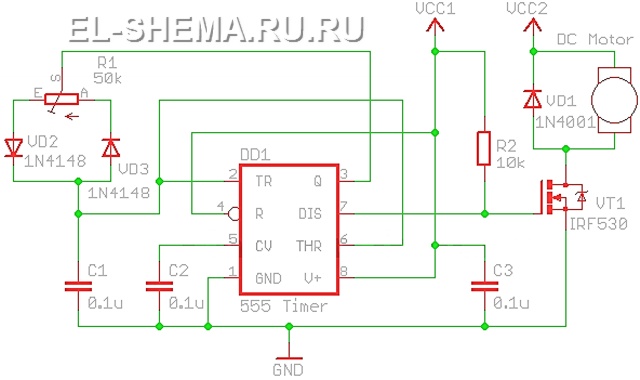
Здесь VT1 — полевой транзистор n-типа, способный выдерживать максимальный ток двигателя при заданном напряжении и нагрузке на валу. VCC1 от 5 до 16 В, VCC2 больше или равно VCC1. Частоту ШИМ сигнала можно рассчитать по формуле:
F = 1.44/(R1*C1), [Гц]
где R1 в омах, C1 в фарадах.
При номиналах указанных на схеме выше, частота ШИМ сигнала будет равна:
F = 1.44/(50000*0.0000001) = 290 Гц.
Стоит отметить, что даже современные устройства, в том числе и высокой мощности управления, используют в своей основе именно такие схемы. Естественно с использованием более мощных элементов, выдерживающих большие токи.
el-shema.ru
РЕГУЛЯТОР ОБОРОТОВ ДВИГАТЕЛЯ 12 В
Во многих электронных схемах используются системы активного охлаждения с вентиляторами. Чаще всего их моторы управляются микроконтроллером или другой специализированной микросхемой, а скорость вращения регулируется с помощью ШИМ. Такое решение характеризуется не слишком хорошей плавностью работы, может привести к нестабильной работе вентилятора, а кроме того, создает много помех.
Для потребностей высококачественной аудиотехники разработан аналоговый регулятор оборотов вентилятора. Схема пригодится при строительстве усилителей НЧ с активной системой охлаждения и позволяет выполнить плавную регулировку оборотов вентиляторов в зависимости от температуры. Производительность и мощность зависит в основном от выходного транзистора, тесты проводились с выходными токами до 2 А, что позволяет подключить даже несколько больших вентиляторов на 12 В. Естественно можно применить это устройство и для управления обычными моторами постоянного тока, при необходимости повысив питающее напряжение. Хотя для совсем уже мощных двигателей придётся задействовать системы плавного пуска tehprivod.su/katalog/ustroystva-plavnogo-puska
Принципиальная схема регулятора оборотов мотора
Схема состоит из двух частей: дифференциального усилителя и стабилизатора напряжения. Первая часть занимается измерением температуры и обеспечивает напряжение, пропорциональное температуре, когда она превышает установленный порог. Это напряжение является управляющим для стабилизатора напряжения, выход которого контролирует питание вентиляторов.

Схема регулятора оборотов электродвигателя постоянного тока приведена на рисунке. Основа – компаратор U2 (LM393), работающий в этой конфигурации как обычный операционный усилитель. Первая его часть U2A работает как усилитель дифференциальный, чьи условия работы определяют резисторы R4-R5 (47k) и R6-R7 (220k). Конденсатор C10 (22pF) улучшает стабильность усилителя, а R12 (10k) подтягивает выход компаратора к плюсу питания.

На один из входов дифференциального усилителя подается напряжение, которое образуется через делитель, состоящий из R2 (6,8k), R3 (680 Ом) и PR1 (500 Ом), и фильтруется с помощью C4 (100nF). На второй вход этого усилителя поступает напряжение с датчика температуры, который в данном случае один из разъемов транзистора T1 (BD139), поляризованный небольшим током с помощью R1 (6,8k).
Конденсатор C2 (100nF) был добавлен, чтобы фильтровать напряжение с датчика температуры. Полярность датчика и делителя опорного напряжения задает стабилизатор U1 (78L05) вместе с конденсаторами C1 (1000uF/16V), C3 (100nF) и C5 (47uF/25V), предоставляя стабилизированное напряжение 5 В.
Компаратор U2B работает как классический усилитель ошибки. Он сравнивает напряжение с выхода дифференциального усилителя с выходным напряжением с помощью цепочки R10 (3,3k), R11 (47 Ом) и PR2 (200 Ом). Исполнительным элементом стабилизатора является транзистор T2 (IRF5305), база которого управляется делителем R8 (10k) и R9 (5,1k).
Конденсатор C6 (1uF) и C7 (22pF) и C9 (10nF) улучшают стабильность петли обратной связи. Конденсатор C8 (1000uF/16V) фильтрует выходное напряжение, он имеет значительное влияние на стабильность системы. Разъемом выхода – AR2 (TB2), а разъем питания – AR1 (TB2).

Благодаря применению выходного транзистора с низким сопротивлением в открытом состоянии, схема обладает очень малым падением напряжения – порядка 50 мВ при выходном токе 1 А, что не требует блока питания с более высоким напряжением для управления вентиляторами, работающие на 12 В.

В большинстве случаев в роли U2 можно применить популярный операционный усилитель LM358, правда несколько ухудшив выходные параметры.
Сборка регулятора
Монтаж следует начинать с установки двух перемычек, затем должны быть установлены все резисторы и мелкие керамические конденсаторы.

Далее устанавливаем переменные резисторы, стабилизатор и все разъемы, заканчивая большими электролитическими конденсаторами. Транзисторы T1 и T2 оставляем на самый конец.

В большинстве случаев оба эти элемента будут установлены снизу платы на ножках, изогнутых под углом 90 градусов. Такая укладка позволит их прикрутить непосредственно к радиатору (обязательно использовать изоляционные прокладки).
Форум
Обсудить статью РЕГУЛЯТОР ОБОРОТОВ ДВИГАТЕЛЯ 12 В
radioskot.ru
РЕГУЛЯТОР ОБОРОТОВ ДВИГАТЕЛЯ С РЕВЕРСОМ
Всем привет, наверно многие радиолюбители, также как и я, имеют не одно хобби, а несколько. Помимо конструирования электронных устройств занимаюсь фотографией, съемкой видео на DSLR камеру, и видео монтажом. Мне, как видеографу, был необходим слайдер для видео съемки, и для начала вкратце объясню, что это такое. Ниже на фото показан фабричный слайдер.

Слайдер предназначен для видеосъемки на фотоаппараты и видеокамеры. Он являются аналогом рельсовой системы, которая используется в широкоформатном кино. С его помощью создается плавное перемещение камеры вокруг снимаемого объекта. Другим очень сильным эффектом, который можно использовать при работе со слайдером, – это возможность приблизиться или удалиться от объекта съемки. На следующем фото изображен двигатель, который выбрал для изготовления слайдера.

В качестве привода слайдера используется двигатель постоянного тока с питанием 12 вольт. В интернете была найдена схема регулятора для двигателя, который перемещает каретку слайдера. На следующем фото индикатор включения на светодиоде, тумблер, управляющий реверсом и выключатель питания.

При работе такого устройства важно, чтоб была плавная регулировка скорости, плюс легкое включение реверса двигателя. Скорость вращения вала двигателя, в случае применения нашего регулятора, плавно регулируется вращением ручки переменного резистора на 5 кОм. Возможно, не только я один из пользователей этого сайта увлекаюсь фотографией, и кто-то ещё захочет повторить это устройство, желающие могут скачать в конце статьи архив со схемой и печатной платой регулятора. На следующем рисунке приведена принципиальная схема регулятора для двигателя:
Схема регулятора

Схема очень простая и может быть легко собрана даже начинающими радиолюбителями. Из плюсов сборки этого устройства могу назвать его низкую себестоимость и возможность подогнать под нужные потребности. На рисунке приведена печатная плата регулятора:

Но область применения данного регулятора не ограничивается одними слайдерами, его легко можно применить в качестве регулятора оборотов, например бор машинки, самодельного дремеля, с питанием от 12 вольт, либо компьютерного кулера, например, размерами 80 х 80 или 120 х 120 мм. Также мною была разработана схема реверса двигателя, или говоря другими словами, быстрой смены вращения вала в другую сторону. Для этого использовал шестиконтактный тумблер на 2 положения. На следующем рисунке изображена схема его подключения:

Средние контакты тумблера, обозначенные (+) и (-) подключают к контактам на плате обозначенным М1.1 и М1.2, полярность не имеет значения. Всем известно, что компьютерные кулеры, при снижении напряжения питания и, соответственно, оборотов, издают в работе намного меньший шум. На следующем фото, транзистор КТ805АМ на радиаторе:

В схеме можно использовать почти любой транзистор средней и большой мощности n-p-n структуры. Диод также можно заменить на подходящие по току аналоги, например 1N4001, 1N4007 и другие. Выводы двигателя зашунтированы диодом в обратном включении, это было сделано для защиты транзистора в моменты включения – отключения схемы, так как двигатель у нас нагрузка индуктивная. Также, в схеме предусмотрена индикация включения слайдера на светодиоде, включенном последовательно с резистором.

При использовании двигателя большей мощности, чем изображен на фото, транзистор для улучшения охлаждения нужно прикрепить к радиатору. Фото получившейся платы приведено ниже:

Плата регулятора была изготовлена методом ЛУТ. Увидеть, что получилось в итоге, можно на видеоролике.
Видео работы
В скором времени, как будут приобретены недостающие части, в основном механика, приступлю к сборке устройства в корпусе. Статью прислал Алексей Cитков.
Форум
Обсудить статью РЕГУЛЯТОР ОБОРОТОВ ДВИГАТЕЛЯ С РЕВЕРСОМ
radioskot.ru
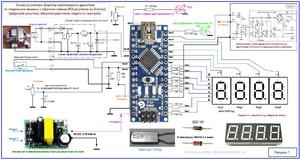
регулятор оборотов с поддержанием мощности
Здравствуйте дорогие мои посетители. Хочу сегодня продолжить тему о коллекторных электродвигателях, а именно как подключить двигатель от стиральной машины с помощью платы регулирования оборотов с поддержкой мощности. Как вы, видели, я затрагивал уже эту тему. Снимал по этому поводу видео “Подключение и регулировка оборотов коллекторного двигателя от стиральной машины-автомат”. Это видео стало очень популярным на моём канале, зрители оставили множество разных комментариев по этой теме. Также я там выложил источник, где я взял схему регулятора оборотов с поддержкой мощности коллекторных электродвигателей. И как мне показалось на тот момент, что человек скачает себе этот файл и соберет себе такую же схему как у меня, и будет её использовать. Но нет, оказалось не все так просто как мне этого хотелось, посыпалась, куча вопросов от людей не только гуманитариев, но и совсем не плохих радиолюбителей. Были даже предложения о покупке плат регулирования оборотов.
Что бы сразу ответить на многие вопросы, Вам, мои дорогие читатели, и появилась эта статья.
Занимаюсь я ремонтом электроинструмента в частности перемоткой электродвигателей. И во время ремонта качественного электроинструмента замечал там «Константную электронику», которая при снижении оборотов на электроинструменте поддерживала мощность электродвигателя. Меня это очень заинтересовало, начал пробовать различные простые регуляторы оборотов, регуляторы оборотов с обратной связью по току, в общем, кучу разных штуковин. Пока не наткнулся на сайт «chipmaker.ru» где пользователь «Bogdan» выложил «схему управления коллекторным двигателем на TDA1085». Собственно говоря, вот эта ссылка: http://www.chipmaker.ru/files/file/1490/ . После того как Вы перешли, жмем на кнопку «Загрузить»В следующем окне обратно жмем «Загрузить»
У нас скачивается архив, разархивировав который, видим в нем несколько файлов (два варианта схем для управления двигателями постоянного и переменного тока с монтажными платами), нам для двигателя переменного тока нужны PSD файлы с пометкой «АС»
Распечатав их (принципиальная, монтажная и печатная плата), я отнес их своему очень хорошему товарищу Игорю , который мне спая регулятор оборотов с поддержкой мощности (сам я, к сожалению, не люблю работу с паяльником). Я испытал регулятор оборотов электроинструмента на TDA1085 на своей «болгарке». К счастью мой товарищ оказался хорошим радиолюбителем и нашел некоторые неточности в этих схемах и исправил их.
Я не могу вам сейчас сказать что этот регулятор оборотов коллекторных электродвигателей панацея, возможно, есть что-то и лучше я не знаю. Как поведет она себя на высоких или даже средних оборотах, честно сказать я не знаю( здесь уже можно посмотреть тест этой платы в разных режимах). Эта схема отлично ведет себя на низких оборотах, и вот уже целый год отлично себя показывает на Самодельном лобзиковом станке , приводом там служит та самая «болгарка» на которой я испытывал регулятор оборотов.
Если Вы уже собрались делать себе регулятор оборотов, давайте немного разберем его:
К клеммам «Фаза и Ноль» подключаем напряжение 220 Вольт (фазировка не влияет на работу схемы), светодиод «HL» служит нам индикатором питания платы регулятора оборотов, к клеммам « М1» подключаем наш электродвигатель, «таходатчик» который выдает постоянный ток подключаем к «Х3» а если же у вас он выдает переменный ток или импульсы, то к «Х2» (Как сделать таходатчик). К контактам «Х4» можно подключить тумблер (выключатель) который будет отключать наш двигатель, его ставить не обязательно, можно также отключать двигатель с помощью регулятора оборотов «R1» который подключается к контактам «Х1». У Bogdana на этой схеме не был указан конденсатор «С 100µF х25V» хотя он присутствует на монтажной плате (забыл указать). Также у него в схеме находится очень мощный симистор «ВТА41 800V» который подходит для управления мощными коллекторными электродвигателями, а для нас подойдет совсем другой на 10…16 Ампер (по цене будет на много дешевле). Симистор должен обязательно быть с радиатором (вся эта схема построена для управления этим симистором, который в свою очередь управляет непосредственно нашим электродвигателем). Ниже симистора на схеме указаны два мощных сопротивления «R31» и «R33» рассчитанные на 0,1 Ом и мощностью 5 Ватт каждый. Под каждые электродвигатель нужно индивидуально настраивать плату регулятора оборотов (как это сделать). Регулируется схема с помощью подстрочных сопротивлений «R3» и «R21». Построечный резистор «R3» регулирует плавность пуска двигателя, а «R21» служит для быстроты реагирования на нагрузку электродвигателя (в зависимости отнего схема будет реагировать плавно или резко на нагрузку).Для лучшего удобства я подготовил Вам список всех деталей, которые применяются в этом регуляторе оборотов с поддержкой мощности («+» обозначены полярные конденсаторы):
20кОм | Пременное 1шт | |
20кОм | Подстроечное 1шт | R3 |
| 1,2кОм 0,25-0,125W | 3шт | R4;5;9 |
| 160кОм 0,25-0,125W | 2шт | R6;8 |
| 24 Ом 0,25-0,125W | 1шт | R7 |
| 1м 0,25-0,125W | 1шт | R10 |
| 120кОм 0,25-0,125W | 1шт | R11 |
| 47кОм 0,25-0,125W | 1шт | R12 |
| 470кОм 0,25-0,125W | 1шт | R13 |
| 220кОм 0,25-0,125W | 1шт | R14 |
| 51 Ом 0,25-0,125W | 4шт | R15;19;25;30 |
| 2,2кОм 0,25-0,125W | 2шт | R16;22 |
| 68кОм 0,25-0,125W | 1шт | R17 |
| 820 Ом 0,25-0,125W | 1шт | R18 |
| 2,7кОм 0,25-0,125W | 1шт | R20 |
10кОм | Подстроечное 1шт | R21 |
| 390кОм 0,25-0,125W | 4шт | R23;24;28;29 |
1шт | R26 | |
1шт | R27 | |
1шт | 32 | |
2шт | R31;33 | |
1шт | R34 | |
1шт | 35 | |
3шт | С1;5;неуказанный | |
3шт | C2;8;9 | |
3шт | С3;4;7 | |
820р | 1шт | С6 |
1шт | С10 | |
1шт | С11 | |
1шт | С12 | |
1шт | С13 | |
1шт | С14 | |
1шт | С15 | |
| 1шт Микросхема | МС1 | |
ВТА41 800V (не обязат) | 1шт Семистор | Т1 |
1шт стабилитрон | ||
1шт стабилитрон | ||
1шт диод | ||
1шт предохранитель | FU1 | |
На 3В | 1шт светодиод |
Изначально автор Bogdan на монтажной плате регулятора оборотов не указал буквенные обозначения всех деталей, но благодаря моему товарищу (огромное ему спасибо) он расставил все обозначения и исправил все неточности которые были у Bogdanа
ВНИМАНИЕ!!! В расположении деталей ОШИБКА! Сопротивление R21 обозначено как R27. Будьте внимательны!
Ссылки для скачивания:
ОЧЕНЬ интересные видео по теме!!!
Агрессивные тесты.
Добавлено Анатолием:
Я думаю Александр не обидится если я в его теме выскажу несколько своих соображений.Собрал уже не одну плату и могу сказать со сто процентной уверенностью. Если у кого то что то не работает, то проверяйте качество изготовления платы, качество и правильность монтажа, исправность элементов и двигателя. Все причины не работы (некорректной работы) кроются только в этом. Печатки и схемы выложенные в нете рабочие. Сам недавно столкнулся с подобным, две разные платы, а проявление неисправности одно и тоже. При включении и добавлении оборотов двигатель раскручивается рывками было ощущение как будто семистор работает на одном полупериоде. Оказалось на одной плате при травлении исчезла дорожка к конденсатору С10 на 47,0х16V, во втором случае этот же конденсатор был высохший.
Попутно убедился, что если уменьшить С11 идущий на 14 ногу микросхемы до 22Н, то двигатель стартует, набирает максимальные обороты и обороты не регулируются. Поэтому с ним тоже нельзя ошибаться 47Н и точка.
Теперь по поводу замеров напряжения.
Я собираю платы с отдельным блоком питания, поэтому промеры даю для этого случая.
Исходные условия, к плате подключен двигатель с таходатчиком, регулятор оборотов в нулевом положении (минимум до конца), блок питания в розетку включён, 220В на плату не подаётся.
1-0,17В
2-0,17В
3-2,63В
4-0
5-0
6-2,4В
7-0,05В
8-0
9-14,65В
10-13,7В
11-12,83В
12-0,55В
13-0
14-11,34В
15-0,03В
16-0,03В
Условия те-же, но подключено 220В и регулятор стоит на небольших оборотах. Двигатель медленно вращается.
1-0,25В
2-0,3В
3-2,62В
4-0,55В
5-0,55В
6-2,4В
7-1,14В
8-0
9-14,2В
10-14,2В
11- не измеряется.
12-0,74В
13-0,69В
14-4,8В при касании щупом двигатель ускоряется.
15-0,73В
16-0,58В
Отличия могут быть но не очень большие. Напряжение на ноге 3 устанавливается регулятором R21.
Кроме этого советовал бы увеличить резистор R9 вместо 1,2 кОм ставить 20кОм. Этим уменьшается напряжение с таходатчика. И R17 вместо 68кОм ставить 27кОм. Ну и диод для защиты микросхемы само собой.
Пару слов по немецкой схеме. При правильной сборке, правильно выполненной печатке и исправных деталях всё работает без вопросов. Рекомендовал бы такую последовательность действий. Собрали плату, проверили сборку, микросхему не ставим. В панельку микросхемы подключаем на ноги 8-9 резистор 1,6кОм 1Вт, подключаем питание 220В, двигатель и таходатчик не подключен (это не принципиально), и меряем напряжение на подключённом резисторе. Должно быть 15-17В. Ставим микросхему, подключаем мотор и таходатчик и наслаждаемся работой. В немецкую схему советую внести следующее изменение. На регуляторе частоты вращения, на центральном отводе, запаять резистор 1,2кОм и второй конец этого резистора на клемму Х2-2, по семе. Боковую ногу регулятора которая раньше шла на центральный отвод, подключаем на корпус. Что это даёт. Раньше, при выведенном в ноль регуляторе, двигатель продолжал вращаться, теперь стоит как ему и положено. А методика настройки простая. Регулятор на ноль, включили, добавили немного оборотов, крутим Р1 пока обороты не станут красивыми на слух и визуально, обороты на максимум, крутим ограничение максимальных оборотов Р3, наслаждаемся своим мастерством.
shenrok.blogspot.com
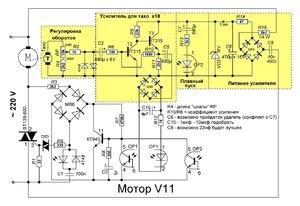
Регулятор оборотов с обратной связью для коллекторных двигателей переменного тока
Большинство мировых производителей профессиональных угловых шлифовальных машинок (болгарок) таких как Bosch, Metabo, Makita, DeWalt и других используют два типа регуляторов оборотов с обратной связью.
С помощью таходатчика
На конце якоря мотора установлен кольцевой магнит с прорезью или срезом, а на плате регулятора установлена катушка индуктивности или датчик Холла. Такой регулятор обеспечивает максимально точную стабилизацию оборотов двигателя при изменении нагрузки.
На основе измерения падения напряжения на электродвигателе
В этом случае измеряется падение напряжения на двигателе, и схема управления изменяет длительность открытия силового ключа. Такой регулятор, если он правильно настроен, обеспечивает также хорошую стабилизацию оборотов двигателя при изменении нагрузки.
Все промышленные регуляторы, собранные на микроконтроллерах, полностью залитые эпоксидной смолой и в итоге они не пригодны для ремонта, а цена за новый регулятор достаточно большая, и составляет примерно 20-30% от стоимости самого электроинструмента.
В поиске специализированных микросхем для решения данной задачи мне приглянулись регуляторы Phase Control фирмы Atmel. Например, простой вариант регулятора на микросхеме U2008B. Рассмотрим схему регулятора на ИМС U2008B приведенную на рис.1. В данном регуляторе можно использовать обратную связь по току или режим плавного пуска, однако в нём нет защиты от перегрузки. Если использовать плавный пуск тогда нужны только элементы С1, R4 и перемычку Х1 не ставим, а если нужна обратную связь — тогда все наоборот.
Рис. 1
Так как ИMC U2008B не может одновременно работать в режиме плавного пуска и обратной связи, она не подходит для нашей задачи. На рис.2 показана схема регулятора на микросхеме U2010B, у которой есть обратная связь по току, защита от перегрузки и плавный старт одновременно. Светодиод D2 индицирует перегрузку электродвигателя. Переключатель SA1 «Mode» обеспечивает возможность выбора действий при перегрузке на двигателе в трех режимах: Положение А — индикация перегрузки и последующий сброс на минимальные обороты. Для восстановления рабочих оборотов, необходимо выключить инструмент.
Рис. 2
Положение В — индикация перегрузки, последующий сброс на минимальные обороты, после снятие нагрузки с инструмента, восстанавливаются установленные обороты, т.е. происходит авто старт.
Положение С — только индикация перегрузки, без остановки двигателя и защиты.
Подбором ёмкости конденсатора СЗ от 1 до 10 мкФ можно изменять длительность и плавность пуска двигателя.
Настройка регулятора.
В техническом описании к ИМС U2010B в схеме подключения обозначено только падение напряжение на R6 в 250 мВ и не указано, каким именно должен быть этот резистор.
Рассчитать сопротивление R6 можно исходя из мощности двигателя по формуле:
R6 = UR6/(Рдвиг/Uпит),
где:
UR6 — напряжение на R6 (250 мВ),
Рдвиг — мощность двигателя,
UПИТ — напряжение питания сети.
Например, для двигателя мощностью 750 Вт рассчитываем: R6= 0,25/(750/220) = 0,07 Ом.
Номиналы резисторов R6 и R11, в зависимости от мощности электродвигателя, приведены в таблице.
| R11 Мощность, Вт | R6*, Ом | Нихром, D 1 мм | Нихром, D 0,8 мм | R11*, кОм |
| 250 | 0,22 | 30 | 19 | 180-270 |
| 300 | 0,18 | 27 | 17 | 180-220 |
| 550 | 0,1 | 25 | 16 | 180 |
| 700 | 0,08 | 20 | 14 | 160 |
| 850 | 0,07 | 17 | 11 | 150 |
| 1000 | 0,055 | 15 | 10 | 100-120 |
| 1200 | 0,047 | 13 | 9 | 90-110 |
| 1500 | 0,04 | 12 | 8 | 80-100 |
| 1800 | 0,03 | 10 | 7 | 70-100 |
| 2000 | 0,028 | 8 | 6 | 65-90 |
| 2200 | 0,025 | 7 | 5 | 65-90 |
Главное правильно подбирать резистор R6 под мощность двигателя. Выше представленная формула правильная, но на практике может потребоваться некоторая коррекция по поведению двигателя под нагрузкой. Если резистор великоват, то двигатель довольно резко стартует (т.е. происходит большая компенсация нагрузки, чем надо), а потом отключается, а если резистор будет мал, то не будет обеспечиваться компенсация нагрузки.
В Datasheet к ИМС U2010B ёмкость конденсатора С2 указана 0,01 мкФ, но она рассчитана на 60-герцовую сеть, и при использования ИМС в сети 50 Гц за период выдавалось несколько импульсов управления. В итоге, обороты электродвигателя практически не регулировались и двигатель работал на полную мощность. Для сети с частотой 50 Гц нужно ёмкость конденсатора С2 увеличить до 0,015 мкФ.
Первый пуск
Переменный резистор Р1 (регулятор оборотов) нужно установить на минимальные обороты двигателя, по схеме движок потенциометра должен быть повернут в сторону резистора R13. Затем подстроенный резистор R10 (компенсация нагрузки) установить в среднее положение, а на место R11 (перегрузка) временно подпаять постоянный резистор сопротивлением 62 кОм. Потом включить регулятор в сеть 220 В / 50 Гц и подстроенным резистором R8 выставить самые минимальные обороты двигателя.
Нужно сделать так, чтобы при включении двигатель начинал вращаться на минимальных оборотах. Если настроить устройство так, чтобы совсем не было напряжения на электродвигателе, то тогда становится слишком нелинейная зависимость управления резистором Р1 — при его повороте сначала двигатель не крутится, а потом резко стартует без плавного пуска.
Далее нужно подключить вольтметр с диапазоном измерения 300 В к выводам двигателя, включить двигатель и на средних оборотах, зажимая вал или привод двигателя через тряпку рукой, выставить такое положение резистора R10, чтобы обороты электродвигателя не менялись при изменении нагрузки на его валу. Одновременно с этим нужно смотреть на вольтметр, подключенный к двигателю. При увеличении нагрузки на валу электродвигателя регулятор прибавляет напряжение, и двигатель крутится с одинаковыми оборотами, независимо от нагрузки.
И вот в последнюю очередь настраивается резистор R11 (перегрузка). Постоянный резистор номиналом 62 кОм выпаиваем и вместо него ставим подстроенный или переменный резистор номиналом 220 кОм. На оборотах двигателя чуть больше минимальных, сильно зажимая вал или привод двигателя, стараемся почти заклинить вал двигателя, и по степенно изменяем величину резистора R11, пока не начнет срабатывать защита, и не станет светиться VD2. Затем измерьте сопротивление переменного резистора тестером и запаяйте в устройство соответствующий резистор. В таблице указано приблизительные значения сопротивления R11,
Детали регулятора
Купить микросхемы U2008B, U2010B можно через сайт AliExpress (www.ru.aliexpress.com) в Китае с бесплатной доставкой на Украину, а далее посылка бесплатно отправляется через «Укрпочту» в любое почтовое отделение на территории Украины. Доставка на Украину производится на протяжении 25-40 дней. Например, цена 1 шт. микросхемы U2010B зависит от корпуса исполнения, примерно 0,9 USD в корпусе S016 и 1,2 USD в корпусе DIP16, а симистора ВТА24-800 — 0,4 USD.
Печатная плата устройства изготовлена из одностороннего фольгированного стеклотекстолита толщиной 1 мм.
Симистор VS1 лучше использовать с изолированной площадкой под радиатор серии ВТА, например BTA12-800, BTA16-800, BTA24-800, или применить другие. При мощности двигателя до 400 Вт, VS1 можно не устанавливать на радиатор. Все SMD детали типоразмера 1206, их можно запаять обычным паяльником с тонким жалом.
Подстроенные резисторы — типа СП3-19а или другой малогабаритный. Переменный резистор Р1 любой на 47-50 кОм, можно малогабаритные СП4-1, СП3-9. Резистор R1 мощностью не менее 2 Вт, например, типа MЛT-2 или др. Резистор R6 изготовлен из нихромовой проволоки диаметром 0,7 — 1 мм. Автор использовал нихромовый провод из старого блока сопротивлений для зажигания автомобилей ГАЗ с маркировкой 1402.3729. Все электролитические конденсаторы на напряжение не менее 50 В. Диод D1 — типа 1N4007 или КД208, также можно использовать диод в SMD исполнении. Светодиод D2 любой малогабаритний диаметром 3-5 мм красного света. Переключатель SA1 любой малогабаритный 3-х позиционный. Если нужен только один режим перегрузки, тогда вместо него можно установить перемычку.
Литература:
- Бирюков С. Автомат плавного пуска коллекторных электродвигателей. // Радио. — 1997. — №7. — С.40-42.
Печатная плата для схемы показанной на рисунке 2:
[hidepost]Скачать[/hidepost]
Автор: Валентин Шипляк, г. Ужгород
Возможно, вам это будет интересно:
meandr.org
