
Регулятор оборотов электродвигателя – TDA1085
В себя включает:
- Плата в сборе – полностью готовая к эксплуатации.
- Резистор регулировки оборотов – в комплекте.
- Установленные клеммы – А (сеть 220 В), М (мотор), Т (таходатчик).
- Питание платы – на прямую от сети 220 вольт, 50 Гц.
- Мощность – до 3000 Вт. (стандартные двигатели от стиральных машин автомат).
- Применение – к коллекторным двигателям (двигателям с щетками).
- Габаритные размеры – длина 96 мм, ширина 96 мм, высота 32 мм.
- Система защиты – по току, предохранителем 5 А.
Дополнительные опции:
- Реверсный переключатель (on-off-on) с проводами и клеммами 16 А, 250 В.
- Измеритель числа оборотов – Тахометр (Отдельное устройство, блок питания ы комплект не входит).
- Реле времени – YYC-2 (Отдельное устройство, блок питания ы комплект не входит).
Для чего нужна эта плата: Данная плата позволяет регулировать обороты коллекторного электродвигателя (с щетками) без потери мощности независимо от нагрузки (в пределах заявленной производителем электродвигателя). С ее помощью вы сможете управлять оборотами электродвигателя от 200 до 20000 об/мин. При этом сохраняя полный момент силы на валу электродвигателя.
С ее помощью вы сможете управлять оборотами электродвигателя от 200 до 20000 об/мин. При этом сохраняя полный момент силы на валу электродвигателя.
Для чего нужен реверсный переключатель: Это тумблер на три положения серии “KCD” с запасом мощности до 4000 Вт., с установленными клеммами и проводами с нанесенной маркировкой к подключению. Устанавливается для изменения стороны вращения вала (ротора) электродвигателя. С его помощью Вы легко сможете изменить направление вращения ротора всего лишь одним переключение тумблера. Внимание! Переключение тумблера во время работы не желательно! На оборотах более 3000 об/мин. ЗАПРЕЩЕНО! Для увеличения срока службы электродвигателя и платы, тумблер реверсного переключателя рекомендуется переключать после полной остановки электродвигателя.
Для чего нужен измеритель числа оборотов: Тахометр просто необходим если Вам нужно замерить обороты станка или вращающегося механизма. Блок питания в комплект не входит.
Для чего нужно реле времени: Таймер времени предназначен для автоматического отключения регулятора. Вы можете выбрать время на таймере и заниматься своими делами, а реле отключит регулятор оборотов через заданное время. Блок питания в комплект не входит.
Дополнительное описание: Монтажная плата изготавливается станочным производством, на заводе в России. Толщина основы текстолита 1,5 мм.Толщина медной фольги 0,35 мм, с нанесенной паяльной маской. Монтаж радиокомпонентов, осуществляется заводским конвейером. Установленные детали в выводном корпусе. Активные радиокомпоненты, закупаются от фирм оригинальных производителей: On semiconductor, ST microelectronics, с целью увеличения надежности и длительного срока эксплуатации.
Внимание! Данная плата применима, только для коллекторных двигателей (двигателей с щетками), с обязательным наличием таходатчика. Данная плата изготавливалась для двигателей от стиральных машин автомат, мощностью до 3000 Вт.
- Каждая плата пред отправкой заказчику проходит полную проверку под нагрузкой, на предмет отсутствия дефектов и брака!
- Предоставляется гарантия и послепродажная консультация!
Различная комплектация
| КОМПЛЕКТАЦИЯ “КОНСТРУКТОР” В себя включает:
| КОМПЛЕКТАЦИЯ “ПЛАТА МОНТАЖНАЯ” В себя включает:
|
Регулятор оборотов коллекторного двигателя – своими руками, схема
При использовании электродвигателя в инструментах, одной из серьёзных проблем является регулировка скорости их вращения.
 Если скорость недостаточно высока, то действие инструмента является недостаточно эффективным.
Если скорость недостаточно высока, то действие инструмента является недостаточно эффективным.Если же она излишне высока, то это приводит не только к существенному перерасходу электрической энергии, но и к возможному пережогу инструмента. При слишком высокой скорости вращения, работа инструмента может стать также менее предсказуемой. Как это исправить? Для этой цели принято использовать специальный регулятор скорости вращения.
Двигатель для электроинструментов и бытовой техники обычно относится к одному из 2 основных типов:
- Коллекторные двигатели.
- Асинхронные двигатели.
В прошлом, вторая из указанных категорий имела наибольшее распространение. Сейчас, примерно 85% двигателей, которые употребляются в электрических инструментах, бытовой или кухонной технике, относятся к коллекторному типу. Объясняется это тем, что они имеют большую степень компактности, они мощнее и процесс управления ими является более простым.
Действие любого электродвигателя построено на очень простом принципе: если между полюсами магнита поместить прямоугольную рамку, которая может вращаться вокруг своей оси, и пустить по ней постоянный ток, то рамка станет поворачиваться. Направление вращения определяется согласно «правилу правой руки».
Эту закономерность можно использовать для работы коллекторного двигателя.
Важным моментом здесь является подключение тока к этой рамке. Поскольку она вращается, для этого используются специальные скользящие контакты. После того, как рамка повернётся на 180 градусов, ток по этим контактам потечёт в обратном направлении. Таким образом, направление вращения останется прежним. При этом, плавного вращения не получится. Для достижения такого эффекта принято использовать несколько десятков рамок.
Сложности и особенности
Сложность создания регулятора оборотов коллекторного двигателя заключается в том, что устройство потребляет не только активную, но и реактивную мощность, которая увеличивается при повышении оборотов. Главной задачей является выравнивание и сокращение разрыва между двумя этими характеристиками.
Главной задачей является выравнивание и сокращение разрыва между двумя этими характеристиками.
Мощность коллекторного двигателя это произведение потребляемого им тока, на напряжение сети. Общее ее значение складывается из активной и реактивной.
В домашних условиях довольно тяжело привести к пустые потери к нуля. Для этого необходимо, чтобы прибор испытывал только активную нагрузку, что можно получить, только используя полупроводниковые резисторы.
Устройство
Коллекторный двигатель состоит обычно из ротора (якоря), статора, щёток и тахогенератора:
- Ротор — это вращающаяся часть, статор — это внешний магнит.
- Щётки, сделанные из графита – это основная часть скользящих контактов, через которую на вращающийся якорь подаётся напряжение.
- Тахогенератор – это прибор, который отслеживает характеристики вращения. В случае нарушения равномерности движения, он корректирует поступающее в двигатель напряжение, тем самым делая его более плавным.
- Статор может содержать не один магнит, а, например, 2 (2 пары полюсов). Также, вместо статических магнитов, здесь могут быть использованы и катушки электромагнитов. Работать такой мотор может как от постоянного, так и от переменного тока.
Простота регулировки скорости коллекторного двигателя определяется тем, что скорость вращения прямо зависит от величины поданного напряжения.
Кроме этого, важной особенностью является то, что ось вращения непосредственно можно присоединять к вращающемуся инструменты без использования промежуточных механизмов.
Если говорить об их классификации, то можно говорить о:
- Коллекторных двигателях постоянного тока.
- Коллекторных двигателях переменного тока.
В этом случае, речь идёт о том, каким именно током происходит питание электродвигателей.
Разница состоит в том, как организованы эти подключения.
Тут принято различать:
- Параллельное возбуждение.

- Последовательное возбуждение.
- Параллельно-последовательное возбуждение.
Принцип работы
Для сборки лучше всего выбрать тиристорный преобразователь, он позволит осуществлять изменение режима работы без существенных потерь.
К тому же, благодаря нему будут настроены такие функции как:
- Разгон-торможение.
- Жесткое регулирование характеристик.
- Переключение на реверсивное движение.
К тому же у него импульсно-фазовое управление. Которое, позволяет не терять момент вращения ротора, не увеличивая потери на реактивной характеристике.
Схема регулятора оборотов будет состоять из следующих ключевых узлов:
- Управляемый выпрямитель сигнала.
- Блок регулирования.
- Система обратной связи.
- Регулятор мощности сети.
Изменение скорости АД с короткозамкнутым ротором
Существует несколько способов:
- Управление вращением за счет изменения электромагнитного поля статора: частотное регулирование и изменение числа пар полюсов.

- Изменение скольжения электромотора за счет уменьшения или увеличения напряжения (может применяться для АД с фазным ротором).
Частотное регулирование
В данном случае регулировка производится с помощью подключенного к двигателю устройства для преобразования частоты. Для этого применяются мощные тиристорные преобразователи. Процесс частотного регулирования можно рассмотреть на примере формулы ЭДС трансформатора:
Двигатель
В зависимости от принципа управления и характеристик, существуют различные типы двигателей. Остановиться стоит только на двух, в одном используется обмотка возбуждения, а в другом постоянный магнит. В зависимости от выполняемой работы нужно правильно подобрать тип агрегата.
Если необходимо регулировать частоту вращения от минимального до конкретного значения, например в дрели. То лучше выбирать схему с постоянным магнитом.
В тех же случаях, когда минимальное значение вращения будет равняться 0 оборотов, лучше использовать обмотку возбуждения.
Такая схема подойдет для регуляторов оборотов кулера компьютера.
Двигатель конструктивно состоит из следующих узлов:
- Якорь, он же ротор, на котором имеется обмотка.
- Коллектор, который выпрямляет ток.
- Статор, обмоткой которого создается магнитное поле.
Частотное регулирование
Ещё совсем недавно (10 лет назад) частотных регуляторов скорости двигателей на рынке было ограниченное количество, и стоили они довольно дорого. Причина — не было дешёвых силовых высоковольтных транзисторов и модулей.
Но разработки в области твердотельной электроники позволили вывести на рынок силовые IGBT-модули. Как следствие — массовое появление на рынке инверторных кондиционеров, сварочных инверторов, преобразователей частоты.
На данный момент частотное преобразование — основной способ регулирования мощности, производительности, скорости всех устройств и механизмов приводом в которых является электродвигатель.
Однако, преобразователи частоты предназначены для управления трёхфазными электродвигателями.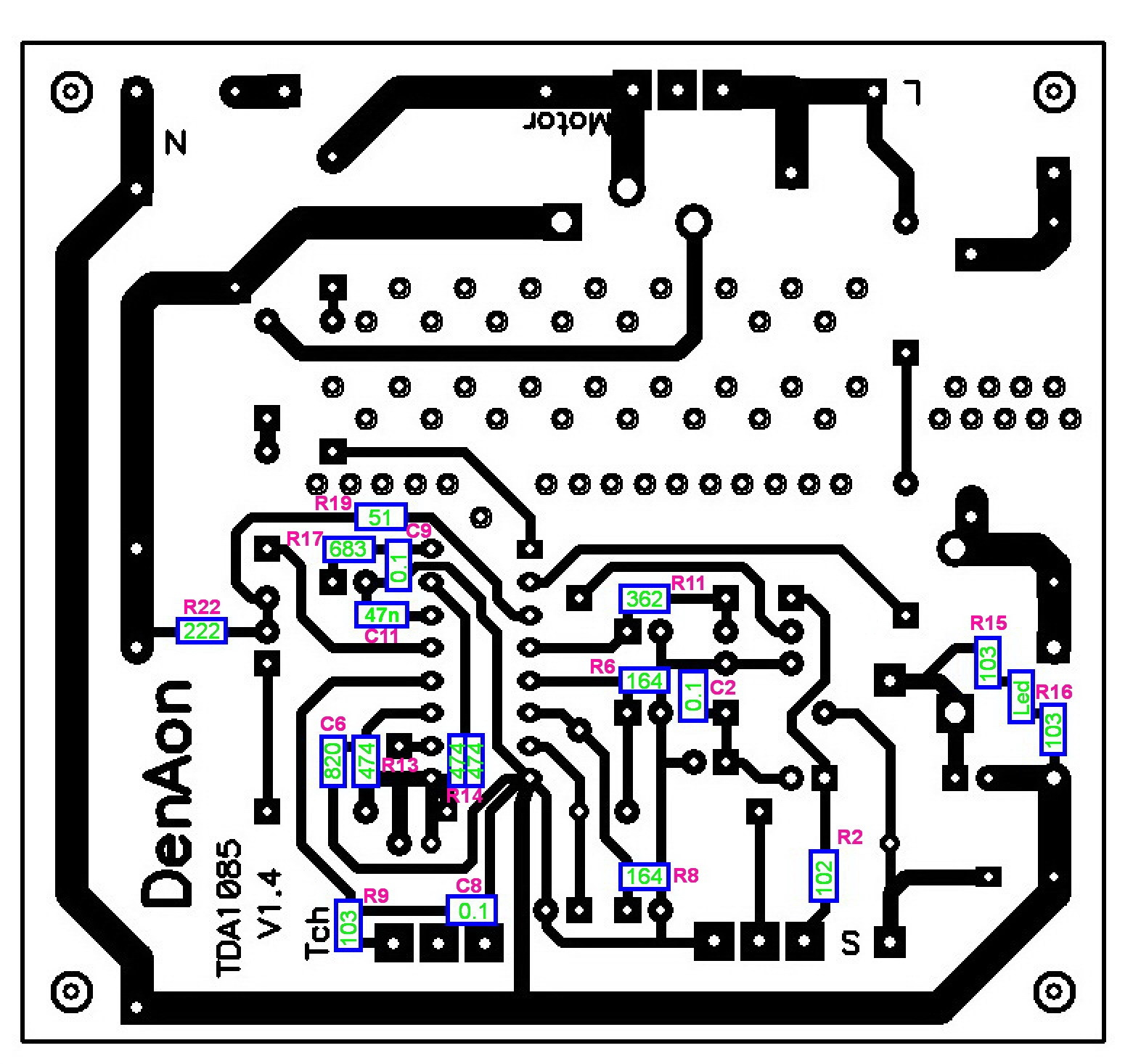
Однофазные двигатели могут управляться:
- специализированными однофазными ПЧ
- трёхфазными ПЧ с исключением конденсатора
Преобразователи для однофазных двигателей
В настоящее время только один производитель заявляет о серийном выпуске специализированного ПЧ для конденсаторных двигателей — INVERTEK DRIVES.
Это модель Optidrive E2
Для стабильного запуска и работы двигателя используются специальные алгоритмы.
При этом регулировка частоты возможна и вверх, но в ограниченном диапазоне частот, этому мешает конденсатор установленный в цепи фазосдвигающей обмотки, так как его сопротивление напрямую зависит от частоты тока:
f — частота тока
С — ёмкость конденсатора
В выходном каскаде используется мостовая схема с четырьмя выходными IGBT транзисторами:
Optidrive E2 позволяет управлять двигателем без исключения из схемы конденсатора, то есть без изменения конструкции двигателя — в некоторых моделях это сделать довольно сложно.
Преимущества специализированного частотного преобразователя:
- интеллектуальное управление двигателем
- стабильно устойчивая работа двигателя
- огромные возможности современных ПЧ:
- возможность управлять работой двигателя для поддержания определённых характеристик (давления воды, расхода воздуха, скорости при изменяющейся нагрузке)
- многочисленные защиты (двигателя и самого прибора)
- входы для датчиков (цифровые и аналоговые)
- различные выходы
- коммуникационный интерфейс (для управления, мониторинга)
- предустановленные скорости
- ПИД-регулятор
Минусы использования однофазного ПЧ:
Использование ЧП для трёхфазных двигателей
Стандартный частотник имеет на выходе трёхфазное напряжение. При подключении к ему однофазного двигателя из него извлекают конденсатор и соединяют по приведённой ниже схеме:
Геометрическое расположение обмоток друг относительно друга в статоре асинхронного двигателя составляет 90°:
Фазовый сдвиг трёхфазного напряжения -120°, как следствие этого — магнитное поле будет не круговое , а пульсирующее и его уровень будет меньше чем при питании со сдвигом в 90°.
В некоторых конденсаторных двигателях дополнительная обмотка выполняется более тонким проводом и соответственно имеет более высокое сопротивление.
При работе без конденсатора это приведёт к:
- более сильному нагреву обмотки (срок службы сокращается, возможны кз и межвитковые замыкания)
- разному току в обмотках
Многие ПЧ имеют защиту от асимметрии токов в обмотках, при невозможности отключить эту функцию в приборе работа по данной схеме будет невозможна
Читать также: Что такое тигли фото
Преимущества:
- более низкая стоимость по сравнению со специализированными ПЧ
- огромный выбор по мощности и производителям
- более широкий диапазон регулирования частоты
- все преимущества ПЧ (входы/выходы, интеллектуальные алгоритмы работы, коммуникационные интерфейсы)
Недостатки метода:
- необходимость предварительного подбора ПЧ и двигателя для совместной работы
- пульсирующий и пониженный момент
- повышенный нагрев
- отсутствие гарантии при выходе из строя, т.
 к. трёхфазные ПЧ не предназначены для работы с однофазными двигателями
к. трёхфазные ПЧ не предназначены для работы с однофазными двигателями
Регулятор оборотов в двигателе нужен для совершения плавного разгона и торможения. Широкое распространение получили такие приборы в современной промышленности. Благодаря им происходит измерение скорости движения в конвейере, на различных устройствах, а также при вращении вентилятора. Двигатели с производительностью на 12 Вольт применяются в целых системах управления и в автомобилях.
Регулятор
Закончив с двигателем и разобравшись с его показателями и режимом работы можно делать регулятор оборотов асинхронного двигателя своими руками.
Необходимо добиться следующих целей:
- Регулировка должна осуществляться от нуля оборотов до максимально возможных значений.
- На низких скоростях крутящий момент должен быть самым высоким.
- Нужно добиться плавного изменения количества оборотов.
Особенности подключения
При подключении проводов и соединении основных узлов между собой следует придерживаться следующим рекомендаций:
- Провода не должны быть слишком длинными.
 Особенно если речь идет о регуляторе оборотов бесколлекторного двигателя.
Особенно если речь идет о регуляторе оборотов бесколлекторного двигателя. - Обмотка не должна быть повреждена.
- Места соединения должны быть надежно запаяны и изолированы друг от друга.
Плавный пуск асинхронных электродвигателей
АД кроме безусловных преимуществ, обладают существенными недостатками. Это рывок на старте и большие пусковые токи, в 7 раз превышающие номинальные. Для мягкого старта электродвигателя используются следующие методы:
- переключение обмоток по схеме звезда – треугольник;
- включение электродвигателя через автотрансформатор;
- использование специализированных устройств для плавного пуска.
В большинстве частотных регуляторов есть функция плавного пуска двигателя. Это не только снижает пусковые токи, но и уменьшает нагрузки на исполнительные механизмы. Поэтому регулирование частоты и плавный пуск довольно сильно связаны между собой.
Пошаговая инструкция
Классическая схема синистора работает по принципу зарядки конденсатора через мало ёмкий резистор. После того, как напряжение между обкладками достигнет нужного значения, симистор начинает пропускать ток к нагрузке.
После того, как напряжение между обкладками достигнет нужного значения, симистор начинает пропускать ток к нагрузке.
Таким образом, можно контролировать емкость конденсатора, изменяя напряжение, которое пойдет на нагрузку. Для этого отлично подойдет реостат, который устанавливается на место резистора.
К сожалению, такая схема быстро нагревается из-за чего нужно устанавливать дополнительный радиатор позволяющий эффективно отводить тепло.
Более подходящей схемой, позволяющей сохранить потерянную мощность и точнее контролировать работу, является коммутация с силовыми резисторами. Их работа основана многократном открытии и закрытии за один период электрической синусоиды.
Данная установка может осуществлять работу от внутреннего накопителя с напряжением 12 В и внешнего 220 В. Однако в таком случае требуется гасящая схема.
В таком режиме работы можно изменять пороговую мощность, это напрямую влияет на мощность работы ротора.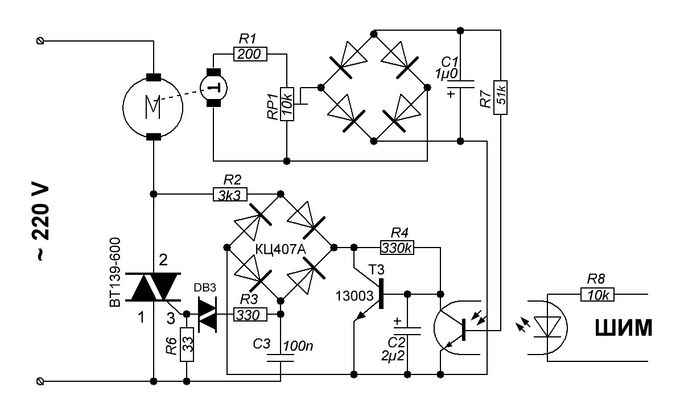 Силовые резисторы выставляются на определенные показания входящего тока, собирая его в нужных объемах.
Силовые резисторы выставляются на определенные показания входящего тока, собирая его в нужных объемах.
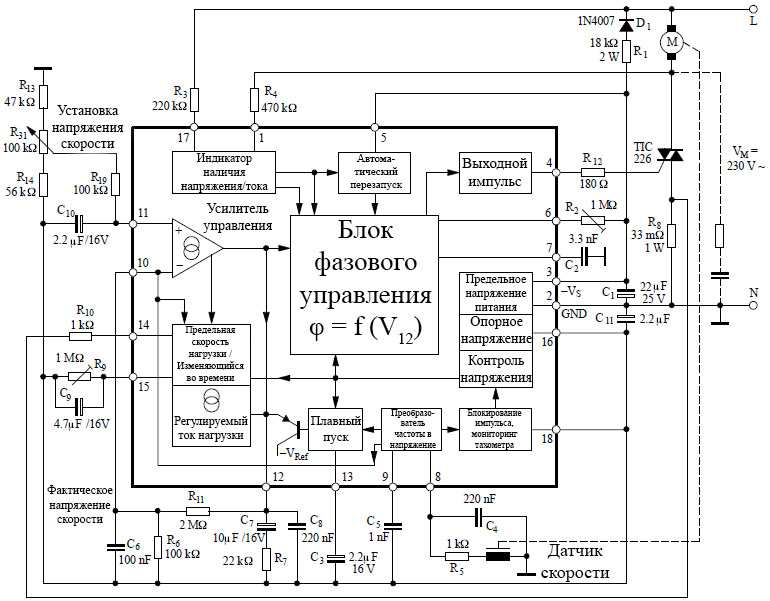
Принцип управления
При задании скорости вращения вала двигателя резистором в цепи вывода 5 на выходе формируется последовательность импульсов для отпирания симистора на определенную величину угла. Интенсивность оборотов отслеживается по тахогенератору, что происходит в цифровом формате. Драйвер преобразует полученные импульсы в аналоговое напряжение, из-за чего скорость вала стабилизируется на едином значении, независимо от нагрузки. Если напряжение с тахогенератора изменится, то внутренний регулятор увеличит уровень выходного сигнала управления симистора, что приведёт к повышению скорости.
Микросхема может управлять двумя линейными ускорениями, позволяющими добиваться требуемой от двигателя динамики. Одно из них устанавливается по Ramp 6 вывод схемы. Данный регулятор используется самими производителями стиральных машин, поэтому он обладает всеми преимуществами для того, чтобы быть использованным в бытовых целях.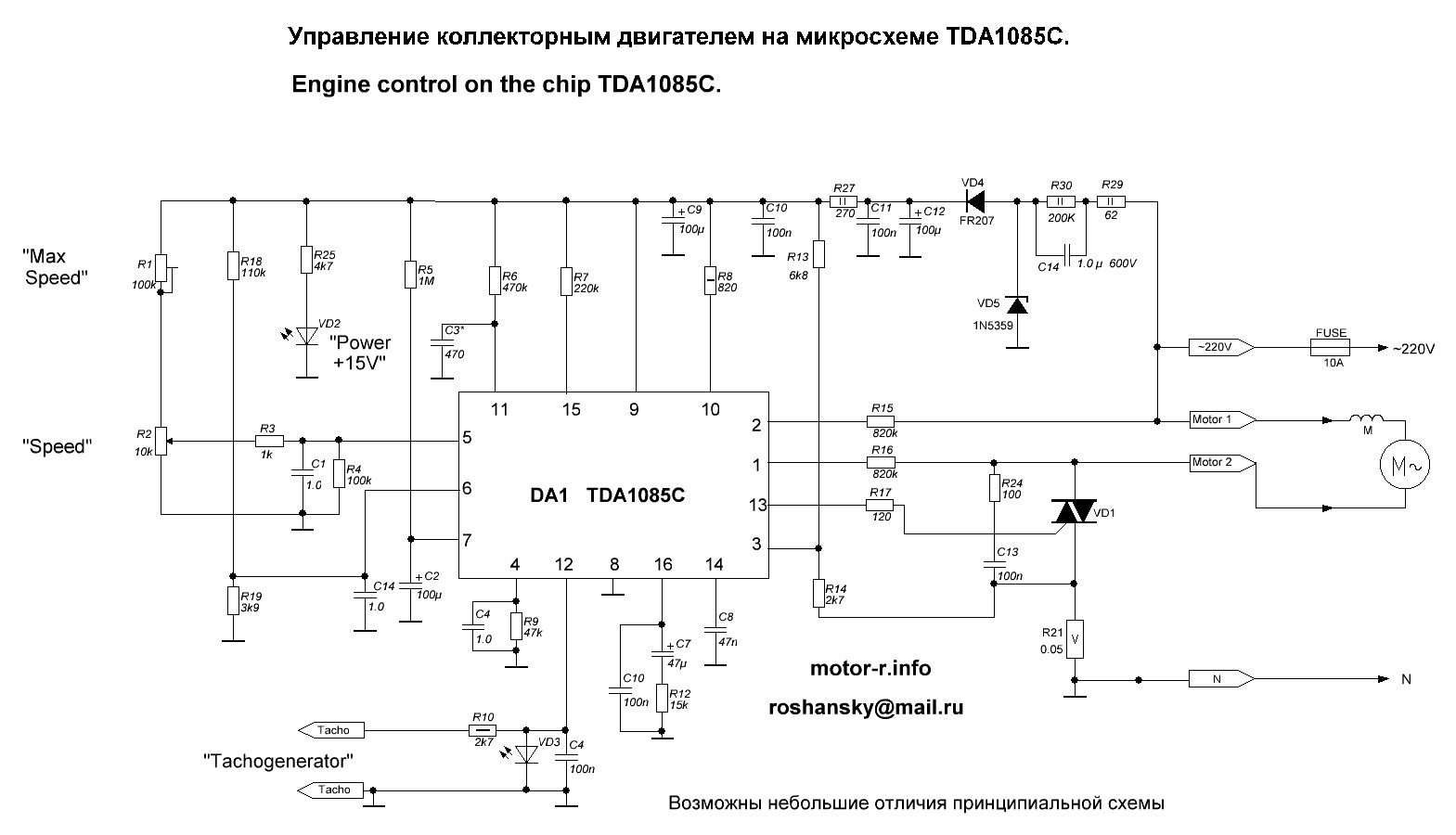 Это обеспечивается благодаря наличию следующих блоков:
Это обеспечивается благодаря наличию следующих блоков:
- Стабилизатор напряжения для обеспечения нормальной работы схемы управления. Он реализован по выводам 9, 10.
- Схема контроля скорости вращения. Реализована по выводам МС 4, 11, 12. При необходимости регулятор можно перевести на аналоговый датчик, тогда выводы 8 и 12 объединяются.
- Блок пусковых импульсов. Он реализован по выводам 1, 2, 13, 14, 15. Выполняет регулировку длительности импульсов управления, задержку, формирования их из постоянного напряжения и калибровку.
- Устройство генерации напряжения пилообразной формы. Выводы 5, 6 и 7. Он используется для регулирования скорости согласно заданному значению.
- Схема усилителя управления. Вывод 16. Позволяет отрегулировать разницу между заданной и фактической скоростью.
- Устройство ограничения тока по выводу 3. При повышении напряжения на нем происходит уменьшение угла отпирания симистора.
Использование подобной схемы обеспечивает полноценное управление коллекторным мотором в любых режимах. Благодаря принудительному регулированию ускорения можно добиваться необходимой скорости разгона до заданной частоты вращения. Такой регулятор можно применять для всех современных двигателей от стиралок, используемых в иных целях.
Благодаря принудительному регулированию ускорения можно добиваться необходимой скорости разгона до заданной частоты вращения. Такой регулятор можно применять для всех современных двигателей от стиралок, используемых в иных целях.
При использовании электродвигателя в инструментах, одной из серьёзных проблем является регулировка скорости их вращения. Если скорость недостаточно высока, то действие инструмента является недостаточно эффективным.
Если же она излишне высока, то это приводит не только к существенному перерасходу электрической энергии, но и к возможному пережогу инструмента. При слишком высокой скорости вращения, работа инструмента может стать также менее предсказуемой. Как это исправить? Для этой цели принято использовать специальный регулятор скорости вращения.
Двигатель для электроинструментов и бытовой техники обычно относится к одному из 2 основных типов:
- Коллекторные двигатели.
- Асинхронные двигатели.
В прошлом, вторая из указанных категорий имела наибольшее распространение. Сейчас, примерно 85% двигателей, которые употребляются в электрических инструментах, бытовой или кухонной технике, относятся к коллекторному типу. Объясняется это тем, что они имеют большую степень компактности, они мощнее и процесс управления ими является более простым.
Фото регулятора оборотов своими руками
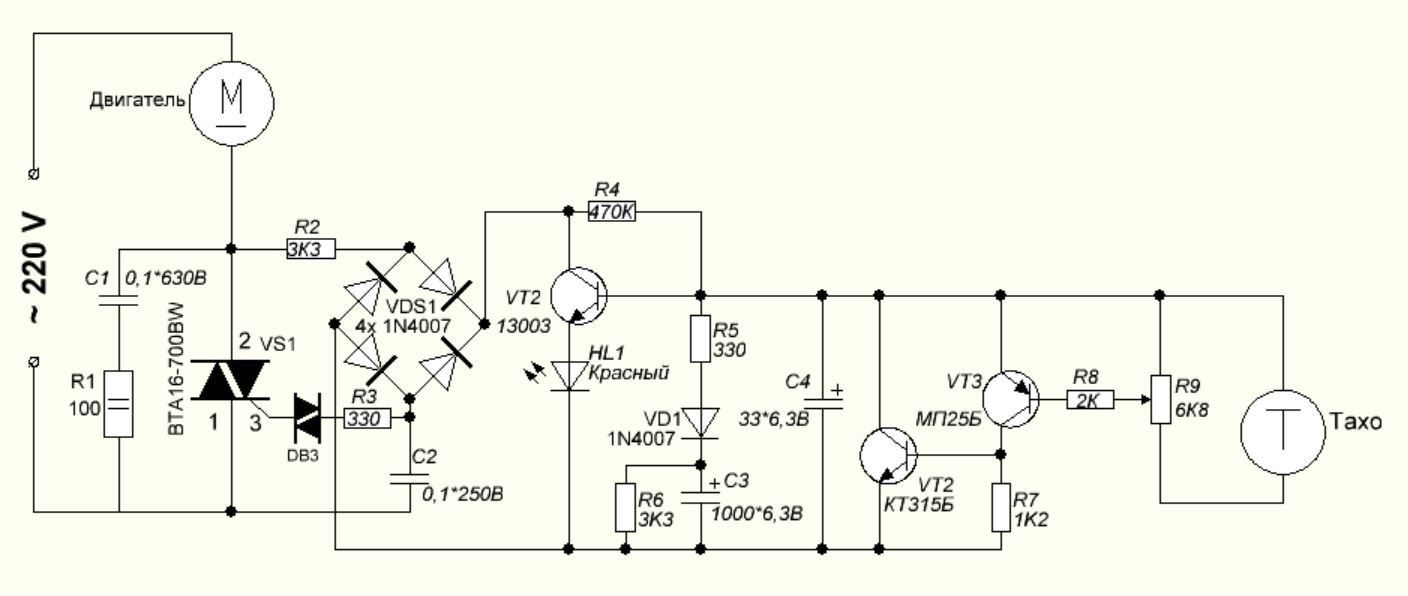
Регулятор оборотов коллекторного двигателя с обратной связью
Плата регулятор оборотов без потери мощности для двигателей от стиральных машин, controller TDA1085
Полностью собранная настроенная и проверенная плата регулировки оборотов двигателей от стиральных машин без потери мощности для двигателей мощностью до 1000 Вт. Плата собрана на оригинальном контроллере TDA1085C? а не его дешевых аналогах/ Установлен мощный симистор с током до 40 А что обеспечивает большой запас устройства по мощности. Данная плата служит для управления коллекторным двигателем который оснащен таходатчиком или датчиком холла. Такие двигатели установлены на современные стиральные машины Indesit, Samsung, LG и других. Регулятор позволяет изменять скорость вращения вала двигателя с поддержанием мощности в пределах от 0 до15000 оборотов вминуту. Скорость вращения двигателя отслеживается тахогенератором.
Такие двигатели установлены на современные стиральные машины Indesit, Samsung, LG и других. Регулятор позволяет изменять скорость вращения вала двигателя с поддержанием мощности в пределах от 0 до15000 оборотов вминуту. Скорость вращения двигателя отслеживается тахогенератором.
Видео обзор платы регулятора оборотов с обратной связью:
Плата обеспечивает поддержку оборотов без потери мощности даже на минимальных оборотах двигателя!
Так как двигатели от стиральных машин обладают высокой надежностью, и достаточно доступны по цене,при этом у многих просто лежат дома без дела от сломанной стиральной машины, то их широко применяют для изготовления различных станков и приспособлений: точильных станков, токарных и даже фрезерных станков, сверлильных станков, медогонок, гончарных кругов, и другого оборудования.
Плата не только регулирует обороты, но и надежно поддерживает их при появлении нагрузки на валу!
На плате установлены подстроечные резисторы для настройки:
– Максимальных оборотов
– Скорости реакции платы на появление нагрузки на валу
– Подстройки и синхронизации работы таходатчика
Комплектация платы регулятора оборотов:
1. Спаянная, настроенная и проверенная плата регулятора оборотов.
2. Переменный резистор с пластиковой ручкой.
3. Клавишный переключатель включения контроллера.
4. Клавишный переключатель направления вращения (Для реверса).
5. Светодиод индикации.
6. Запасной предохранитель.
7. Краткое описание.
Есть в наличии комплект платы регулятора оборотов со всеми необходимыми проводами. Помимо самой платы в комплект входит:
- Сетевой шнур для подключения питания длинной 1 метр.
- Провод для подключения таходатчика длинной 1 метр
- Провода для подключения двигателя с распаянным тумблером реверса.
- Светодиод с проводом 20 см.
- Тумблер включения с проводом 20 см.
- Резистор регулятора оборотов с с проводами 20 см.
- Запасной предохранитель и краткое описание прилагаются
Стоимость платы регулятора оборотов с комплектом проводов составит 800 грн. Если вам необходим такой комплект, то обязательно сообщите об этом по телефону и напишите в комментарии к заказу.
Техника безопасности при работе с регулятором
Для того чтобы избежать поражения электрическим током при обращении с регулятором оборотов, соблюдайте основные меры безопасности:
– Никогда не прикасайтесь к подключенной к сети 220v плате руками.
– С осторожностью проводите настройку платы, при необходимости делайте это при помощи отвертки с прорезиненной ручкой.
– Будьте аккуратны с переменным резистором, на нем тоже присутствует напряжение в местах подключения к клемм и в местах соединения с проводами.
– Настоятельно рекомендую сначала подключить двигатель и сетевой провод к плате, а затем уже подключать к сети 220V. – Желательно плату поместить в корпус, предусмотрев отверстия
для вентиляции. Если корпус металлический обязательно его заземляем, вместе с двигателем.
– Не допускайте перегрева симистора, отслеживайте температуру путем на радиаторе. Температура не должна превышать 80°С. Не прикасайтесь к радиатору до отключения регулятора от сети.
– Помните, что в случае выхода симистора из строя, двигатель может выйди на максимальные обороты, поэтому установите кнопку аварийного отключения питания.
Ознакомится со схемой подключения данной платы к двигателю, а так же особенности подключения датчика Холла вы можете в статье перейдя по ссылке
Схема коммутации реверса двигателя:
Видео обзор подключения реверса к плате регулятора оборотов
Регулирование скорости вращения коллекторного двигателя постоянного тока
Для подачи питания на обмотки ротора коллекторного двигателя постоянного тока используется встроенный коммутатор, получивший наименование коллектор. Конструктивный элемент состоит из медных пластин, изолированных друг от друга с помощью диэлектрика. По пластинам скользят графитовые щетки, попеременно подавая электрическое напряжение на разные обмотки ротора. В результате образуется переменное магнитное поле, взаимодействующее с постоянным полем статора. Так электрическая энергия преобразуется в механическую и вал двигателя начинает вращаться. На производстве и в быту применяется мотор-редуктор — система, состоящая из электродвигателя и редуктора. В качестве примера можно привести схему движения щеток лобового стекла автомобиля. Вращение ротора передается на цилиндрические колеса с косыми зубьями, которые приводят дворники в рабочее положение.
Регулирование оборотов двигателя постоянного тока методом ШИМ
Главные характеристики электродвигателя — мощность, скорость вращения и крутящий момент (иногда еще выделяют момент инерции ротора). От этих величин зависит, сможет ли электропривод справиться с возложенными на него задачами. В большинстве электрических сетей используется переменный ток, который перед подачей на щетки электромотора нужно сделать постоянным. Для этого используют выпрямители, в их схеме нередко предусмотрена возможность добавления дополнительных сегментов для регулировки напряжения. Основной недостаток выпрямителя заключается в том, что при его работе происходит существенная потеря мощности, а значит, снижается КПД и часть электроэнергии уходит в никуда.
Для того, чтобы управление двигателем постоянного тока было эффективным, применяют широтно-импульсную модуляцию, сокращенно ШИМ. Принцип действия ШИМ можно объяснить на простом примере: если взять электрический мотор малой мощности и запитать его от батарейки, вал двигателя будет вращаться с максимальной скоростью, но если попеременно замыкать и размыкать контакты, идущие к источнику питания, частота вращения ротора изменится, какое-то время он будет двигаться по инерции. На щетки коллектора подается полное напряжение, а ШИМ позволяет установить точное время подачи. Способ дает возможность управлять вращением вала с применением цифровых микроконтроллеров.
Изменение скорости вращения ротора
Регулятор оборотов коллекторного двигателя подает на щетки импульсы. Например, максимальное напряжение электромотора 12 Вольт, а нам нужно, чтобы он работал в половину своей силы. Как реализовать это на практике, используя широтно-импульсную модуляцию? Для этого нужно рассмотреть понятие импульса — всплеска напряжения. Если таких всплесков в течение 1 секунды случается 10, то говорят о том, что частота импульсов составляет 10 Герц. То есть, за секунду на щетки электродвигателя 10 раз подается полное напряжение. Для начала нужно определить период следования импульсов T по формуле:
T=1/F,
где F — это частота. В нашем случае частота равна 10 Гц, тогда:
T=1/10=0,1 с,
то есть, напряжение поднимается от 0 Вольт до 12 и снова опускается до 0 за 0,1 секунды.
Еще одной важной характеристикой импульса является скважность S — это отношение периода следования к продолжительности импульса, не имеющее единиц измерения. Параметр определяется по формуле:
S=T/t,
где t — длина импульса. В нашем случае длина импульса составит половину от периода следования импульса, ведь нам нужен мотор, работающий вполсилы. Тогда получим:
S=0,1/0,05=2.
Теперь вычислим, сколько процентов от максимального числа оборотов мы получим с нашими показателями, для этого найдем коэффициент заполнения D, выражаемый в процентах и вычисляемый по формуле:
D=1/S,
где S — полученная ранее скважность. Выполняем подсчет:
D=1/2=0,5.
Вычисляем проценты:
0,5*100=50%.
Если в течение секунды на обмотку электродвигателя мы 10 раз подадим напряжение, которое будет длиться 0,05 секунды, то получим скорость вращения, соответствующую 6 Вольтам напряжения.
t=T-25%=0,1–25%=0,075 с,
то есть 75% времени периода следования импульсов нужно подавать ток.
Найдем скважность:
S=0,1/0,075=1,33.
Теперь вычислим коэффициент заполнения:
D=1/1,33=0,75*100=75%.
Это наглядный пример. В реальности после завершения подачи тока на щетки, вал электродвигателя продолжает двигаться по инерции, поэтому если угловая скорость ротора растет и не успевает уменьшиться в течение паузы, регулирование потеряет свою эффективность.
Способы торможения двигателя
Если используется мотор-редуктор, или электродвигатель с нагрузкой на вал, обеспечивающей быстрое торможение, то в принципиальной схеме ШИМ достаточно предусмотреть ключ и один диод. Во время работы ключ подает импульс на коллектор, отчего происходит разгон ротора, после прекращения подачи питания, вал затормаживается самостоятельно, благодаря статической нагрузке. При этом существует 2 основных режима работы:
Во время работы ключ подает импульс на коллектор, отчего происходит разгон ротора, после прекращения подачи питания, вал затормаживается самостоятельно, благодаря статической нагрузке. При этом существует 2 основных режима работы:
- Режим непрерывного тока. Ток в якоре хотя и уменьшается во время паузы, но все же продолжает протекать в прежнем направлении.
- Режим прерывистого тока. Ток в якоре течет только во время действия импульса, на паузе напряжение равняется нулю.
На двигателях, которые работают без статической нагрузки, необходимо применять электрическое торможение. Для этого в принципиальную схему включают сопротивление. Во время паузы, ключ присоединяет якорь мотора к сопротивлению, для запуска процесса динамического торможения.
Виды преобразователей
Широтно-импульсные преобразователи, осуществляющие управление двигателем постоянного тока, состоят из силовой части, схемы управления и подразделяются на следующие виды:
- Тиристорные.
 Дополняются схемами с параллельной и последовательной искусственной коммутацией.
Дополняются схемами с параллельной и последовательной искусственной коммутацией. - С запираемыми тиристорами. Схема работы мало отличима от транзисторных.
- Транзисторные. Характеризуются низкой инерционностью и минимальным внутренним сопротивлением.
Широтно-импульсный регулятор оборотов коллекторного двигателя позволяет гибко настраивать скорость вращения ротора с минимальным показателем рассеивания мощности.
Так же по теме ШИМ регулирования предлагаем статью “Регулирование скорости вращения коллекторного двигателя постоянного тока”
Мосгриндер регулятор оборотов коллекторного двигателя (без потери мощности)
Данный регулятор снят с производства
Взамен него выпущен IРD-VR в корпусе IP54
Существует 2 способа регулировки частоты коллекторного двигателя. Первый простой способ —регулировка по напряжению. Второй способ управления двигателем — импульсный под управлением микропроцессора. Первый способ прост и дешев, но пропорционально падению оборотов двигателя падает и крутящий момент. Инструмент теряет работоспособность на малых оборотах. Второй способ регулировки дороже и сложнее, но главное, он требует установки на вал двигателя таходатчика. Поставить таходатчик на уже готовый инструмент невозможно.
Первый способ прост и дешев, но пропорционально падению оборотов двигателя падает и крутящий момент. Инструмент теряет работоспособность на малых оборотах. Второй способ регулировки дороже и сложнее, но главное, он требует установки на вал двигателя таходатчика. Поставить таходатчик на уже готовый инструмент невозможно.
Мы нашли решение данной проблемы. Строго говоря, наш новый регулятор оборотов коллективного (щеточного) двигателя сохраняет крутящий момент а не мощность. Не теряется усилие на круге при работе. Точнее почти не теряется. Регулятор дает ~70-80% от максимального усилия при нулевом положении регулятора. Сохранение 100% крутящего момента не достижимо без использования обратной связи через таходатчик. В нашей схеме процессор регулятора оборотов получает данные о текущей частоте работы щеточного двигателя по косвенным признакам. Из за этой погрешности в определении частоты и теряется 20-30% усилия. Но в сравнении с регулировкой частоты щеточного двигателя по напряжению контраст разительный. Регулятор оборотов работает вплоть до самых низких частот.
Регулятор оборотов работает вплоть до самых низких частот.
Технические характеристики:
Габаритные размеры: Д=85, Ш=85, В=70 мм (шнур 1,4 м)
Масса: 200 гр.
Диапазон допустимых мощностей регулировки: 800-1100 Вт
Подключение 220 В
Тип регулировки: микропроцессорная
Пылезащитное исполнений
Мосгриндер
Доставка:до терминала ТК
Страна – владелец бренда:Россия
Страна производства:Россия
Размер габаритный, мм:60х70х80
блок управления коллекторным двигателем постоянного тока.
Приложение к статье: Важнейший станок “деревянного” моделиста.
Прежде всего – для чего это нужно. Почти у каждого моделиста имеется самодельный или промышленный электроинструмент с приводом от коллекторного двигателя постоянного тока. При этом обычно такой инструмент не имеет регулятора оборотов или имеется простейшая ступенчатая регулировка. Не буду лишний раз доказывать, что наличие регулятора оборотов в электроинструменте позволяет оптимально подобрать режим для каждой операции, особенно при использовании различных насадок. Кроме того, моделисты часто используют низковольтные нагреватели – паяльники, приспособления для гибки деревянных реек и т. п. При этом с помощью регулятора можно получить оптимальную температуру нагревателя. Моделисту иногда приходится наносить гальванические покрытия, для чего необходим регулируемый источник постоянного тока. Все эти функции способно выполнить устройство, описанное ниже.
При этом обычно такой инструмент не имеет регулятора оборотов или имеется простейшая ступенчатая регулировка. Не буду лишний раз доказывать, что наличие регулятора оборотов в электроинструменте позволяет оптимально подобрать режим для каждой операции, особенно при использовании различных насадок. Кроме того, моделисты часто используют низковольтные нагреватели – паяльники, приспособления для гибки деревянных реек и т. п. При этом с помощью регулятора можно получить оптимальную температуру нагревателя. Моделисту иногда приходится наносить гальванические покрытия, для чего необходим регулируемый источник постоянного тока. Все эти функции способно выполнить устройство, описанное ниже.
При конструировании бормашинывстал вопрос о выборе схемы регулятора оборотов. Реостатные схемы регулирования скорости вращения коллекторных двигателей постоянного тока, в том числе с применением силовых транзисторов, на которых падает часть напряжения, обладают низким КПД при малых и средних оборотах. На балластных транзисторных ключах рассеивается значительная тепловая мощность, что ужесточает требования к системе их охлаждения. Поэтому выбор системы регулирования скорости вращения пал на импульсные схемы с изменением ширины прямоугольных импульсов напряжения, подаваемых на обмотку двигателя (широтно-импульсная модуляция – ШИМ). Принцип ШИМ заключается в следующем: напряжение в нагрузку подается импульсами постоянной амплитуды, причем соотношение между шириной импульса и паузы (скважность) регулируется, что эквивалентно изменению напряжения питания на нагрузке. Достоинством этой схемы является ее высокая экономичность и надежность. Управляющий нагрузкой транзистор бывает только либо полностью включен, либо выключен, поэтому он практически не нагревается и его можно устанавливать без теплоотвода.
На балластных транзисторных ключах рассеивается значительная тепловая мощность, что ужесточает требования к системе их охлаждения. Поэтому выбор системы регулирования скорости вращения пал на импульсные схемы с изменением ширины прямоугольных импульсов напряжения, подаваемых на обмотку двигателя (широтно-импульсная модуляция – ШИМ). Принцип ШИМ заключается в следующем: напряжение в нагрузку подается импульсами постоянной амплитуды, причем соотношение между шириной импульса и паузы (скважность) регулируется, что эквивалентно изменению напряжения питания на нагрузке. Достоинством этой схемы является ее высокая экономичность и надежность. Управляющий нагрузкой транзистор бывает только либо полностью включен, либо выключен, поэтому он практически не нагревается и его можно устанавливать без теплоотвода.
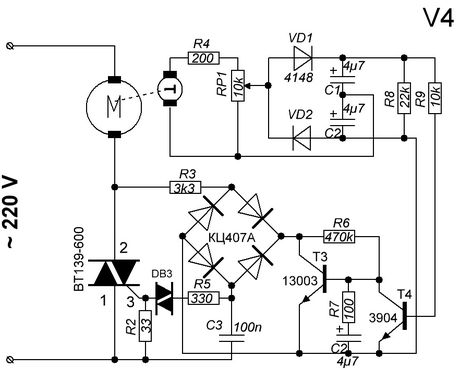
После анализа различных регуляторов качестве базовой была выбрана схема , опубликованная в журнале (№4/2001., перепечатка из “Hobby Elektronika” №7/01, автор Иштван Кекеш). Регулятор (см.схему) содержит задающий генератор напряжения треугольной формы частотой 2кГц (DA1.1, DA1.4), электронный ключ VT1 и регулятор скважности (DA1.2, DA1.3, R8). На рисунке ниже показаны графики напряжений в типовых точках схемы.
Здесь синим цветом показано напряжение на выходе генератора треугольного напряжения (вывод 1 DA1), красным – напряжение регулировки оборотов с потенциометра R8, зеленым – напряжение на двигателе. Очень наглядно видно, что включение и выключение напряжения на нагрузке происходит в момент совпадения напряжения задающего генератора и напряжения на регулирующем потенциометре. Чем выше управляющее напряжение, тем шире импульс на нагрузке.
В схеме предусмотрена возможность включения двигателя с помощью ножной педали SA2. В моем варианте в качестве педали работает обыкновенный короткоходовый концевой выключатель с нормально замкнутыми контактами (в народе – ), лежащий на полу. При выключенном SA1 двигатель работает постоянно, при включенном – только при нажатии на педаль. Благодаря наличию конденсатора C2 пуск двигателя осуществляется плавно, что иногда может быть полезно (при указанной емкости C2 примерно за 1 сек.). Переключатель SA4 служит для реверсирования двигателя. Диод D3 стабилизирует питание регулятора. Питание осуществляется через понижающий трансформатор TV1 и выпрямитель D4. Параметры трансформатора зависят от примененного электродвигателя. В первом приближении напряжение вторичной обмотки трансформатора должно быть равно номинальному напряжению электродвигателя плюс 5 вольт, падающих на выпрямителе и ключевом транзисторе. Для возможности работы в форсированном режиме можно добавить еще процентов 20-30. Расчетный ток вторичной обмотки трансформатора, диодов выпрямителя и ключевого транзистора должны быть больше, чем ток, потребляемый электродвигателем, причем для надежности работы лучше дать запас в 3-5 раз. При напряжении питания менее 20В диод D3 можно исключить.
При выключенном SA1 двигатель работает постоянно, при включенном – только при нажатии на педаль. Благодаря наличию конденсатора C2 пуск двигателя осуществляется плавно, что иногда может быть полезно (при указанной емкости C2 примерно за 1 сек.). Переключатель SA4 служит для реверсирования двигателя. Диод D3 стабилизирует питание регулятора. Питание осуществляется через понижающий трансформатор TV1 и выпрямитель D4. Параметры трансформатора зависят от примененного электродвигателя. В первом приближении напряжение вторичной обмотки трансформатора должно быть равно номинальному напряжению электродвигателя плюс 5 вольт, падающих на выпрямителе и ключевом транзисторе. Для возможности работы в форсированном режиме можно добавить еще процентов 20-30. Расчетный ток вторичной обмотки трансформатора, диодов выпрямителя и ключевого транзистора должны быть больше, чем ток, потребляемый электродвигателем, причем для надежности работы лучше дать запас в 3-5 раз. При напряжении питания менее 20В диод D3 можно исключить. Напряжения, указанные на схеме, соответствуют двигателю 27В 30 Вт.
Напряжения, указанные на схеме, соответствуют двигателю 27В 30 Вт.
Большинство элементов схемы смонтировано на печатной плате размером 65Х40 мм. (более тонкой линией показана перемычка) Плата установлена в корпусе на двух трубчатых стойках с винтами М2,5 (см. также схему расположения элементов и шаблон для сверления отверстий). Внутри корпуса смонтированы трансформатор, конденсатор С4, выпрямитель D4. Регулятор оборотов R8, переключатели и разъемы для подключения двигателя и педали смонтированы на лицевой панели, резисторы R13 И R14 смонтированы на R8.
В качестве DA1 можно применить любой универсальный счетверенный операционный усилитель. В оригинале были указаны TL064, TL075, TL084, я применил LM324. Ключевой транзистор применен КТ829А (100В, 8А ), для более мощных двигателей можно применить КТ827А (100В, 20А). Диоды D1 и D2 защищают VT1 от выбросов напряжения на индуктивной нагрузке.
При налаживании R13 и R14 не устанавливают, провода от платы припаивают прямо к R8. При правильном монтаже и исправных деталях схема начинает работать сразу. Вращением R8 проверяют регулировку оборотов от нуля до максимума. Если последние не совпадают с крайними положениями R8, необходимо подобрать R13 и R14, чтобы максимум и минимум совпали с крайними положениями регулятора. Возможен вариант, когда схема не будет работать из-за того, что не запускается задающий генератор. В этом случае можно попробовать немного увеличить номинал R4. Для изменения времени плавного пуска можно изменять емкость C2.
При правильном монтаже и исправных деталях схема начинает работать сразу. Вращением R8 проверяют регулировку оборотов от нуля до максимума. Если последние не совпадают с крайними положениями R8, необходимо подобрать R13 и R14, чтобы максимум и минимум совпали с крайними положениями регулятора. Возможен вариант, когда схема не будет работать из-за того, что не запускается задающий генератор. В этом случае можно попробовать немного увеличить номинал R4. Для изменения времени плавного пуска можно изменять емкость C2.
В заключение хочу отметить, что потратив всего около $10 и немного свободного времени, можно значительно улучшить характеристики своего электроинструмента. Все вопросы по изготовлению и наладке данного устройства задавайте в форуме.
© Игорь Капинос, 2005
© www.shipmodeling.ru
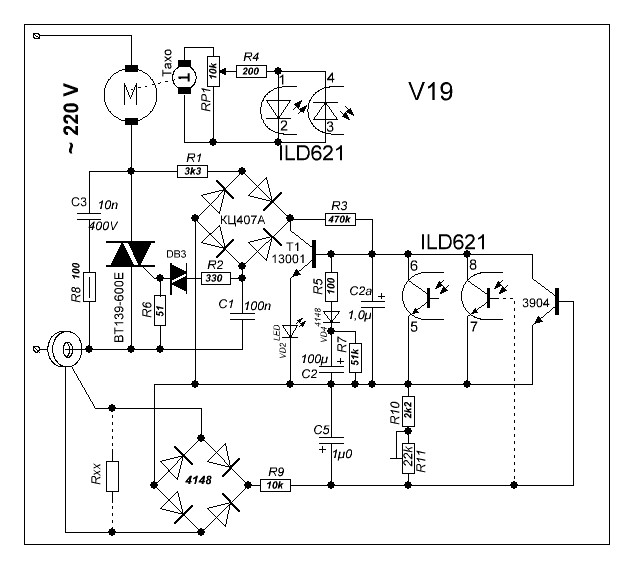
Регулятор оборотов с обратной связью для коллекторных двигателей переменного тока — Меандр — занимательная электроника
Большинство мировых производителей профессиональных угловых шлифовальных машинок (болгарок) таких как Bosch, Metabo, Makita, DeWalt и других используют два типа регуляторов оборотов с обратной связью.
С помощью таходатчика
На конце якоря мотора установлен кольцевой магнит с прорезью или срезом, а на плате регулятора установлена катушка индуктивности или датчик Холла. Такой регулятор обеспечивает максимально точную стабилизацию оборотов двигателя при изменении нагрузки.
На основе измерения падения напряжения на электродвигателе
В этом случае измеряется падение напряжения на двигателе, и схема управления изменяет длительность открытия силового ключа. Такой регулятор, если он правильно настроен, обеспечивает также хорошую стабилизацию оборотов двигателя при изменении нагрузки.
Все промышленные регуляторы, собранные на микроконтроллерах, полностью залитые эпоксидной смолой и в итоге они не пригодны для ремонта, а цена за новый регулятор достаточно большая, и составляет примерно 20-30% от стоимости самого электроинструмента.
В поиске специализированных микросхем для решения данной задачи мне приглянулись регуляторы Phase Control фирмы Atmel. Например, простой вариант регулятора на микросхеме U2008B. Рассмотрим схему регулятора на ИМС U2008B приведенную на рис.1. В данном регуляторе можно использовать обратную связь по току или режим плавного пуска, однако в нём нет защиты от перегрузки. Если использовать плавный пуск тогда нужны только элементы С1, R4 и перемычку Х1 не ставим, а если нужна обратную связь — тогда все наоборот.
Например, простой вариант регулятора на микросхеме U2008B. Рассмотрим схему регулятора на ИМС U2008B приведенную на рис.1. В данном регуляторе можно использовать обратную связь по току или режим плавного пуска, однако в нём нет защиты от перегрузки. Если использовать плавный пуск тогда нужны только элементы С1, R4 и перемычку Х1 не ставим, а если нужна обратную связь — тогда все наоборот.
Рис. 1
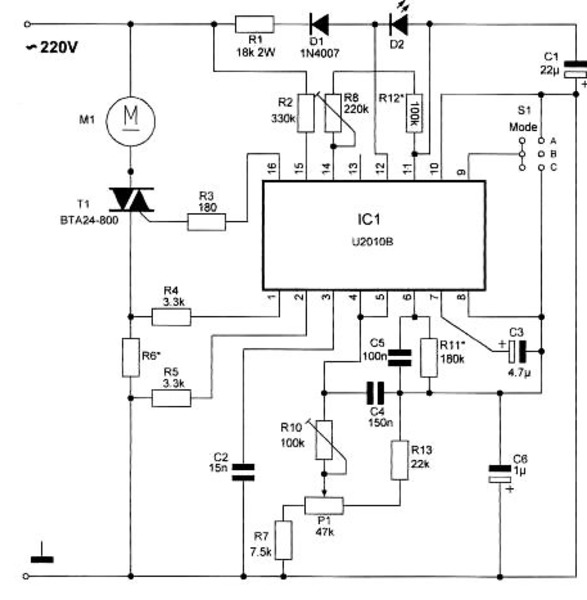
Так как ИMC U2008B не может одновременно работать в режиме плавного пуска и обратной связи, она не подходит для нашей задачи. На рис.2 показана схема регулятора на микросхеме U2010B, у которой есть обратная связь по току, защита от перегрузки и плавный старт одновременно. Светодиод D2 индицирует перегрузку электродвигателя. Переключатель SA1 «Mode» обеспечивает возможность выбора действий при перегрузке на двигателе в трех режимах: Положение А — индикация перегрузки и последующий сброс на минимальные обороты. Для восстановления рабочих оборотов, необходимо выключить инструмент.
Рис. 2
Положение В — индикация перегрузки, последующий сброс на минимальные обороты, после снятие нагрузки с инструмента, восстанавливаются установленные обороты, т.е. происходит авто старт.
Положение С — только индикация перегрузки, без остановки двигателя и защиты.
Подбором ёмкости конденсатора СЗ от 1 до 10 мкФ можно изменять длительность и плавность пуска двигателя.
Настройка регулятора.
В техническом описании к ИМС U2010B в схеме подключения обозначено только падение напряжение на R6 в 250 мВ и не указано, каким именно должен быть этот резистор.
Рассчитать сопротивление R6 можно исходя из мощности двигателя по формуле:
R6 = UR6/(Рдвиг/Uпит),
где:
UR6 — напряжение на R6 (250 мВ),
Рдвиг — мощность двигателя,
UПИТ — напряжение питания сети.
Например, для двигателя мощностью 750 Вт рассчитываем: R6= 0,25/(750/220) = 0,07 Ом.
Номиналы резисторов R6 и R11, в зависимости от мощности электродвигателя, приведены в таблице.
| R11 Мощность, Вт | R6*, Ом | Нихром, D 1 мм | Нихром, D 0,8 мм | R11*, кОм |
| 250 | 0,22 | 30 | 19 | 180-270 |
| 300 | 0,18 | 27 | 17 | 180-220 |
| 550 | 0,1 | 25 | 16 | 180 |
| 700 | 0,08 | 20 | 14 | 160 |
| 850 | 0,07 | 17 | 11 | 150 |
| 1000 | 0,055 | 15 | 10 | 100-120 |
| 1200 | 0,047 | 13 | 9 | 90-110 |
| 1500 | 0,04 | 12 | 8 | 80-100 |
| 1800 | 0,03 | 10 | 7 | 70-100 |
| 2000 | 0,028 | 8 | 6 | 65-90 |
| 2200 | 0,025 | 7 | 5 | 65-90 |
Главное правильно подбирать резистор R6 под мощность двигателя. Выше представленная формула правильная, но на практике может потребоваться некоторая коррекция по поведению двигателя под нагрузкой. Если резистор великоват, то двигатель довольно резко стартует (т.е. происходит большая компенсация нагрузки, чем надо), а потом отключается, а если резистор будет мал, то не будет обеспечиваться компенсация нагрузки.
Выше представленная формула правильная, но на практике может потребоваться некоторая коррекция по поведению двигателя под нагрузкой. Если резистор великоват, то двигатель довольно резко стартует (т.е. происходит большая компенсация нагрузки, чем надо), а потом отключается, а если резистор будет мал, то не будет обеспечиваться компенсация нагрузки.
В Datasheet к ИМС U2010B ёмкость конденсатора С2 указана 0,01 мкФ, но она рассчитана на 60-герцовую сеть, и при использования ИМС в сети 50 Гц за период выдавалось несколько импульсов управления. В итоге, обороты электродвигателя практически не регулировались и двигатель работал на полную мощность. Для сети с частотой 50 Гц нужно ёмкость конденсатора С2 увеличить до 0,015 мкФ.
Первый пуск
Переменный резистор Р1 (регулятор оборотов) нужно установить на минимальные обороты двигателя, по схеме движок потенциометра должен быть повернут в сторону резистора R13. Затем подстроенный резистор R10 (компенсация нагрузки) установить в среднее положение, а на место R11 (перегрузка) временно подпаять постоянный резистор сопротивлением 62 кОм. Потом включить регулятор в сеть 220 В / 50 Гц и подстроенным резистором R8 выставить самые минимальные обороты двигателя.
Потом включить регулятор в сеть 220 В / 50 Гц и подстроенным резистором R8 выставить самые минимальные обороты двигателя.
Нужно сделать так, чтобы при включении двигатель начинал вращаться на минимальных оборотах. Если настроить устройство так, чтобы совсем не было напряжения на электродвигателе, то тогда становится слишком нелинейная зависимость управления резистором Р1 — при его повороте сначала двигатель не крутится, а потом резко стартует без плавного пуска.
Далее нужно подключить вольтметр с диапазоном измерения 300 В к выводам двигателя, включить двигатель и на средних оборотах, зажимая вал или привод двигателя через тряпку рукой, выставить такое положение резистора R10, чтобы обороты электродвигателя не менялись при изменении нагрузки на его валу. Одновременно с этим нужно смотреть на вольтметр, подключенный к двигателю. При увеличении нагрузки на валу электродвигателя регулятор прибавляет напряжение, и двигатель крутится с одинаковыми оборотами, независимо от нагрузки.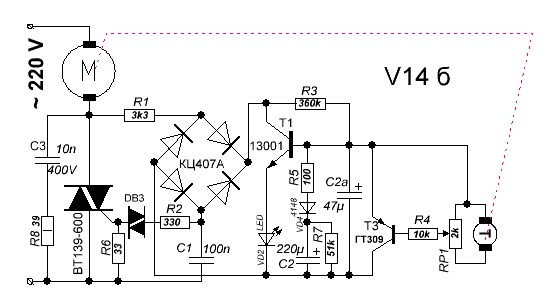
И вот в последнюю очередь настраивается резистор R11 (перегрузка). Постоянный резистор номиналом 62 кОм выпаиваем и вместо него ставим подстроенный или переменный резистор номиналом 220 кОм. На оборотах двигателя чуть больше минимальных, сильно зажимая вал или привод двигателя, стараемся почти заклинить вал двигателя, и по степенно изменяем величину резистора R11, пока не начнет срабатывать защита, и не станет светиться VD2. Затем измерьте сопротивление переменного резистора тестером и запаяйте в устройство соответствующий резистор. В таблице указано приблизительные значения сопротивления R11,
Детали регулятора
Купить микросхемы U2008B, U2010B можно через сайт AliExpress (www.ru.aliexpress.com) в Китае с бесплатной доставкой на Украину, а далее посылка бесплатно отправляется через «Укрпочту» в любое почтовое отделение на территории Украины. Доставка на Украину производится на протяжении 25-40 дней. Например, цена 1 шт. микросхемы U2010B зависит от корпуса исполнения, примерно 0,9 USD в корпусе S016 и 1,2 USD в корпусе DIP16, а симистора ВТА24-800 — 0,4 USD.
Печатная плата устройства изготовлена из одностороннего фольгированного стеклотекстолита толщиной 1 мм.
Симистор VS1 лучше использовать с изолированной площадкой под радиатор серии ВТА, например BTA12-800, BTA16-800, BTA24-800, или применить другие. При мощности двигателя до 400 Вт, VS1 можно не устанавливать на радиатор. Все SMD детали типоразмера 1206, их можно запаять обычным паяльником с тонким жалом.
Подстроенные резисторы — типа СП3-19а или другой малогабаритный. Переменный резистор Р1 любой на 47-50 кОм, можно малогабаритные СП4-1, СП3-9. Резистор R1 мощностью не менее 2 Вт, например, типа MЛT-2 или др. Резистор R6 изготовлен из нихромовой проволоки диаметром 0,7 — 1 мм. Автор использовал нихромовый провод из старого блока сопротивлений для зажигания автомобилей ГАЗ с маркировкой 1402.3729. Все электролитические конденсаторы на напряжение не менее 50 В. Диод D1 — типа 1N4007 или КД208, также можно использовать диод в SMD исполнении. Светодиод D2 любой малогабаритний диаметром 3-5 мм красного света. Переключатель SA1 любой малогабаритный 3-х позиционный. Если нужен только один режим перегрузки, тогда вместо него можно установить перемычку.
Литература:
- Бирюков С. Автомат плавного пуска коллекторных электродвигателей. // Радио. — 1997. — №7. — С.40-42.
Печатная плата для схемы показанной на рисунке 2:
[hidepost]Скачать[/hidepost]
Автор: Валентин Шипляк, г. Ужгород
Лучший регулятор скорости коллекторного двигателя – Отличные предложения по контроллеру скорости коллекторного двигателя от глобального регулятора скорости от продавцов коллекторного двигателя
Отличная новость !!! Вы попали в нужное место для регулятора скорости коллекторного двигателя. К настоящему времени вы уже знаете, что что бы вы ни искали, вы обязательно найдете это на AliExpress. У нас буквально тысячи отличных продуктов во всех товарных категориях.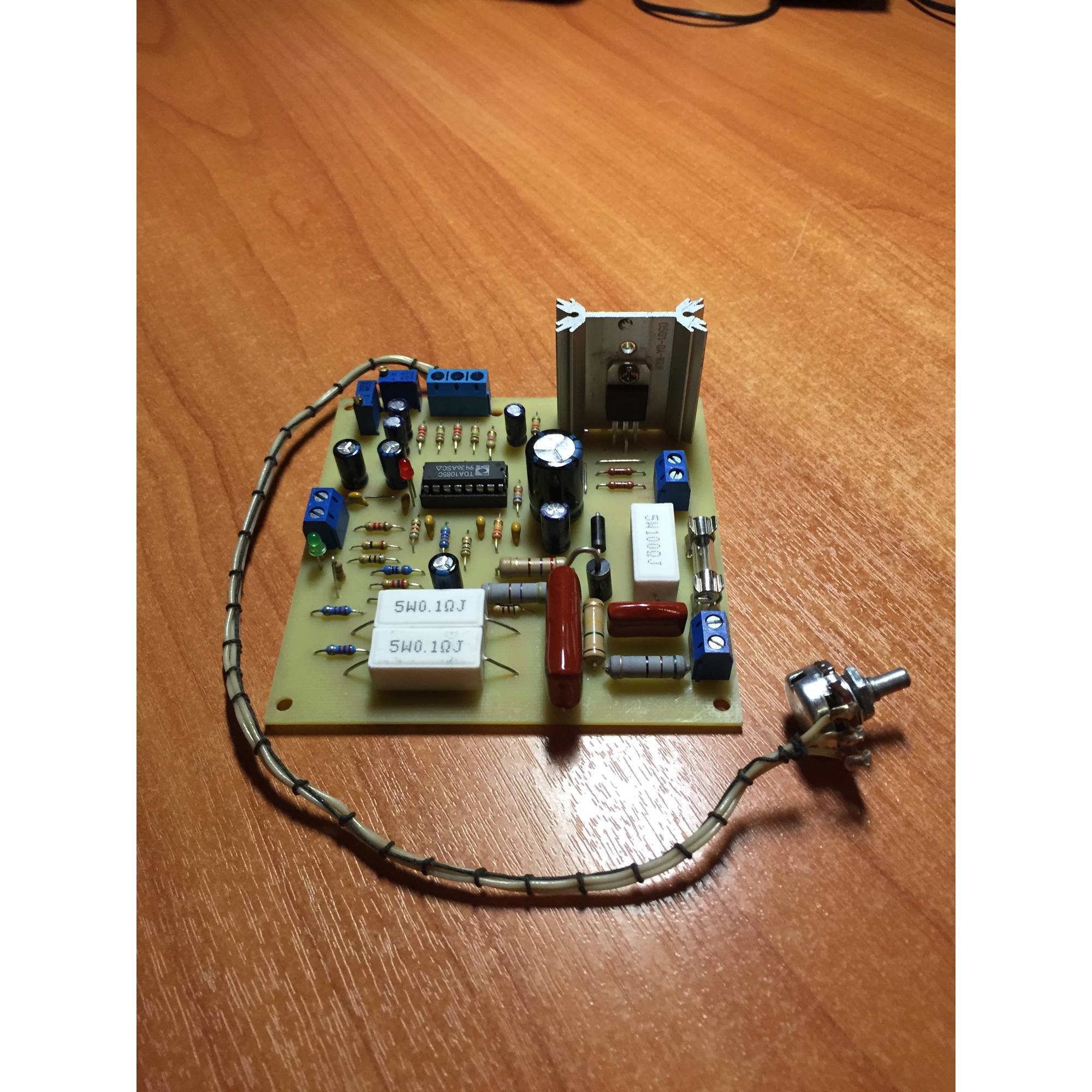 Ищете ли вы товары высокого класса или дешевые и недорогие оптовые закупки, мы гарантируем, что он есть на AliExpress.
Ищете ли вы товары высокого класса или дешевые и недорогие оптовые закупки, мы гарантируем, что он есть на AliExpress.
Вы найдете официальные магазины торговых марок наряду с небольшими независимыми продавцами со скидками, каждый из которых предлагает быструю доставку и надежные, а также удобные и безопасные способы оплаты, независимо от того, сколько вы решите потратить.
AliExpress никогда не уступит по выбору, качеству и цене.Каждый день вы будете находить новые онлайн-предложения, скидки в магазинах и возможность сэкономить еще больше, собирая купоны. Но вам, возможно, придется действовать быстро, поскольку этот регулятор максимальной скорости коллекторного двигателя должен в кратчайшие сроки стать одним из самых востребованных бестселлеров. Подумайте, как вам будут завидовать друзья, когда вы скажете им, что приобрели свой регулятор скорости коллекторного двигателя на AliExpress. Благодаря самым низким ценам в Интернете, дешевым тарифам на доставку и возможности получения на месте вы можете еще больше сэкономить.
Подумайте, как вам будут завидовать друзья, когда вы скажете им, что приобрели свой регулятор скорости коллекторного двигателя на AliExpress. Благодаря самым низким ценам в Интернете, дешевым тарифам на доставку и возможности получения на месте вы можете еще больше сэкономить.
Если вы все еще не уверены в регуляторе скорости коллекторного двигателя и думаете о выборе аналогичного товара, AliExpress – отличное место для сравнения цен и продавцов. Мы поможем вам решить, стоит ли доплачивать за высококлассную версию или вы получаете столь же выгодную сделку, приобретая более дешевую вещь. И, если вы просто хотите побаловать себя и потратиться на самую дорогую версию, AliExpress всегда позаботится о том, чтобы вы могли получить лучшую цену за свои деньги, даже сообщая вам, когда вам будет лучше дождаться начала рекламной акции. , а также ожидаемую экономию. AliExpress гордится тем, что у вас всегда есть осознанный выбор при покупке в одном из сотен магазинов и продавцов на нашей платформе. Реальные покупатели оценивают качество обслуживания, цену и качество каждого магазина и продавца. Кроме того, вы можете узнать рейтинги магазина или отдельных продавцов, а также сравнить цены, доставку и скидки на один и тот же продукт, прочитав комментарии и отзывы, оставленные пользователями. Каждая покупка имеет звездный рейтинг и часто имеет комментарии, оставленные предыдущими клиентами, описывающими их опыт транзакций, поэтому вы можете покупать с уверенностью каждый раз.Короче говоря, вам не нужно верить нам на слово – просто слушайте миллионы наших довольных клиентов.
AliExpress гордится тем, что у вас всегда есть осознанный выбор при покупке в одном из сотен магазинов и продавцов на нашей платформе. Реальные покупатели оценивают качество обслуживания, цену и качество каждого магазина и продавца. Кроме того, вы можете узнать рейтинги магазина или отдельных продавцов, а также сравнить цены, доставку и скидки на один и тот же продукт, прочитав комментарии и отзывы, оставленные пользователями. Каждая покупка имеет звездный рейтинг и часто имеет комментарии, оставленные предыдущими клиентами, описывающими их опыт транзакций, поэтому вы можете покупать с уверенностью каждый раз.Короче говоря, вам не нужно верить нам на слово – просто слушайте миллионы наших довольных клиентов.
А если вы новичок на AliExpress, мы откроем вам секрет. Непосредственно перед тем, как вы нажмете «купить сейчас» в процессе транзакции, найдите время, чтобы проверить купоны – и вы сэкономите еще больше. Вы можете найти купоны магазина, купоны AliExpress или собирать купоны каждый день, играя в игры в приложении AliExpress.Вместе с бесплатной доставкой, которую предлагают большинство продавцов на нашем сайте, вы сможете приобрести speed controller of the collector motor по самой выгодной цене.
Вы можете найти купоны магазина, купоны AliExpress или собирать купоны каждый день, играя в игры в приложении AliExpress.Вместе с бесплатной доставкой, которую предлагают большинство продавцов на нашем сайте, вы сможете приобрести speed controller of the collector motor по самой выгодной цене.
У нас всегда есть новейшие технологии, новейшие тенденции и самые обсуждаемые лейблы. На AliExpress отличное качество, цена и сервис всегда в стандартной комплектации. Начните самый лучший шоппинг прямо здесь.
AB-026: Бездатчиковый стабилизатор скорости для двигателя постоянного тока
Введение
Скорость двигателя – это параметр двигателя постоянного тока, который часто измеряется и регулируется, обычно с помощью дополнительных датчиков и с обратной связью по замкнутому контуру. Для этого метода управления скоростью требуется какой-либо датчик скорости, обычно устанавливаемый на валу двигателя. Некоторые из наших двигателей постоянного тока и мотор-редукторов имеют задние валы специально для этой цели, например, 212-109.
Для этого метода управления скоростью требуется какой-либо датчик скорости, обычно устанавливаемый на валу двигателя. Некоторые из наших двигателей постоянного тока и мотор-редукторов имеют задние валы специально для этой цели, например, 212-109.
Эта блок-схема, показанная ниже, представляет собой типичную систему управления с обратной связью, которая может быть разработана для работы в аналоговом или цифровом режиме.
Система управления с обратной связью для скорости двигателя постоянного тока
Датчики Холла и оптические датчикиобычно используются с цифровыми контроллерами, тогда как в аналоговых схемах часто используются тахогенераторы. С помощью ШИМ-управления можно достичь хорошей точности, гибкости и снизить потери мощности. Однако это происходит за счет дополнительного компонента и, возможно, модификации механической конструкции, если вы планируете использовать его в существующем продукте.
Для щеточных двигателей постоянного тока можно измерять и контролировать скорость без каких-либо датчиков на двигателе, используя основную характеристику – напряжение обратной ЭДС, зависящее от скорости.
Бессенсорное аналоговое измерение скорости двигателя
Двигатель постоянного тока моделируется как последовательное соединение внутреннего сопротивления и источника напряжения обратной ЭДС. Напряжение на клеммах двигателя складывается из обратной ЭДС и падения напряжения, превышающего сопротивление катушки.
Эквивалентная схема электродвигателя постоянного тока с щеткой
Падение напряжения на внутреннем сопротивлении якоря зависит от тока двигателя (и, следовательно, от момента нагрузки).Невозможно измерить скорость напрямую, измеряя только напряжение на клеммах двигателя.
Сопротивление обмотки Ra обычно постоянно – хотя оно имеет небольшую температурную зависимость, мы можем компенсировать его, чтобы падение напряжения на якоре двигателя было пропорционально току двигателя.
Поскольку измерить обратную ЭДС напрямую невозможно, нам необходимо рассчитать ее по следующему уравнению:
$$ V_ {мотор} = V_ {bemf} + (I_ {a} \ times R_ {a}) $$
К сожалению, напрямую измерить напряжение якоря также невозможно – однако мы можем подключить дополнительный (внешний) резистор последовательно с двигателем. Измерение падения напряжения на этом последовательном резисторе позволяет определить обратную ЭДС.
Измерение падения напряжения на этом последовательном резисторе позволяет определить обратную ЭДС.
с последовательным резистором
Если мы установим значение последовательного резистора равным сопротивлению в двигателе, мы гарантируем, что любое изменение падения напряжения на последовательном резисторе равно падению напряжения в якоре:
$$ V_ {a} = I_ {a} \ times R_ {a} $$
$$ V_ {s} = I_ {a} \ times R_ {s} $$
$$ R_ {s} = R_ {a} $$
$$ V_ {s} = V_ {a} $$
Итак, сначала нам нужно узнать или измерить сопротивление якоря двигателя.Это можно сделать путем измерения сопротивления на клеммах двигателя с помощью омметра или путем измерения тока остановки с известным напряжением питания. При использовании последнего предпочтительнее использовать низкое напряжение питания, чтобы избежать повреждения из-за перегрузки по току.
Например, при питании двигателя 1,2 В и измерении 100 мА во время останова сопротивление якоря рассчитывается как:
$$ V_ {supply} = I_ {stall} \ times R_ {a} $$
$$ R_ {a} = \ frac {V_ {supply}} {I_ {stall}} $$
$$ R_ {a} = \ frac {1. 2 В} {100 мА} $$
2 В} {100 мА} $$
$$ R_ {a} = 12 \ Omega $$
При использовании омметра для измерения оконечного сопротивления снимите среднее значение нескольких показаний при разных положениях ротора.
Напряжение питания будет равно напряжению последовательного резистора, напряжению сопротивления якоря и напряжению обратной ЭДС.
$$ V_ {supply} = V_ {s} + V_ {a} + V_ {bemf} $$
Мы можем рассчитать напряжение обратной ЭДС, вычтя двойное падение напряжения на последовательном резисторе из напряжения питания.
$$ V_ {bemf} = V_ {supply} – (2 \ times V_ {s}) $$
Чтобы уменьшить потери мощности, мы можем использовать более низкое значение последовательного сопротивления, но резистор в конечном итоге уменьшит напряжение, воспринимаемое двигателем. Используя мостовую схему, можно сохранить высокую чувствительность измерения и компенсировать потери мощности в двигателе:
Мостовая схема для измерения напряжения обратной ЭДС
Правая опора моста состоит из последовательно включенного двигателя M и резистора Rs . Левая ножка представляет собой последовательное соединение резисторов R1 и R2 , каждая ножка подключена к источнику питания. Напряжение обратной ЭДС измеряется между точками A и B .
Rload представляет входное сопротивление нашей измерительной цепи. Поскольку он будет состоять из операционного усилителя, его входное сопротивление будет намного больше, чем другие сопротивления в этой схеме (идеальные операционные усилители имеют бесконечное входное сопротивление).
Нам необходимо убедиться, что напряжение между точками A, и B не зависит от тока двигателя и напряжения питания и зависит только от скорости двигателя и входного сопротивления измерительной цепи ( Rload ).
Начнем с анализа цепи без обратной ЭДС, т.е. когда двигатель остановлен. Чтобы мост был сбалансирован, напряжение между точками A, и B должно быть нулевым.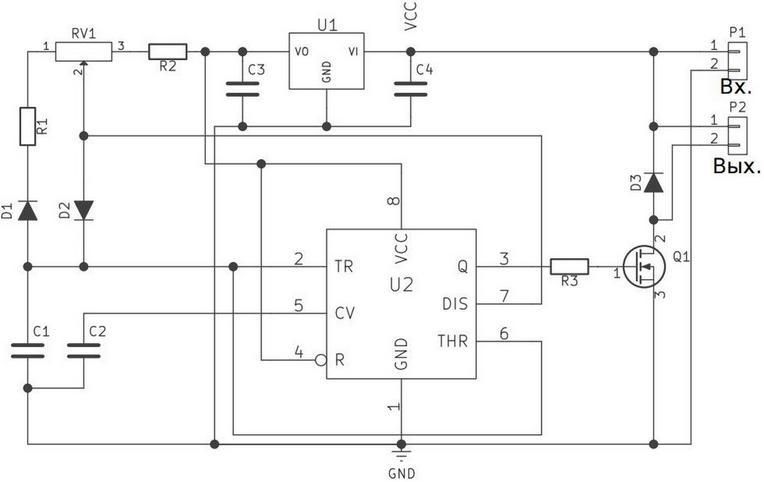 Это происходит, пока соотношение между R1 и R2 такое же, как Rs и Ra :
Это происходит, пока соотношение между R1 и R2 такое же, как Rs и Ra :
$$ \ frac {R_ {2}} {R_ {1}} = \ frac {R_ {a}} {R_ {s}} $$
h – коэффициент усиления нашего моста:
$$ h = \ frac {R_ {1}} {R_ {2}} = \ frac {R_ {s}} {R_ {a}} $$
Если мы выводим двигатель из состояния остановки, напряжение обратной ЭДС пропорционально скорости:
$$ V_ {bemf} = k_ {e} \ times n $$
, где ke – электрическая постоянная для нашего двигателя, а n – скорость двигателя.
Если двигатель может вращаться со скоростью холостого хода, для идеального двигателя мы ожидаем, что Ia равно 0. Это потому, что идеальные двигатели игнорируют сопротивление воздуха и трение подшипников. Напряжение на холостом ходу:
$$ V_ {rpm_ {NL}} = k_ {e} \ times n_ {NL} $$
Отсюда Vbemf можно подписать как:
$$ V_ {bemf} = V_ {rpm_ {NL}} \ times \ frac {n} {n_ {NL}} = V_ {rpm_ {NL}} \ times K $$
Где K – коэффициент пропорциональности между Vbemf и V_rpm в нашей схеме. {2} \ times R_ {load}} \ times R_ {load} $$
{2} \ times R_ {load}} \ times R_ {load} $$
А для работы без нагрузки:
$$ V_ {rpm} = \ frac {h} {h + 1} \ times V_ {rpm_ {NL}} \ times K $$
Выходное напряжение между точками A, и B не зависит от источника питания и тока двигателя, как без нагрузки, так и при работе под нагрузкой. Он зависит от х , и при увеличении выходное напряжение также увеличивается.
Как упоминалось ранее, сопротивление якоря будет изменяться в зависимости от температуры, что приводит к разбалансировке моста и влияет на выходную мощность В об / мин .Чтобы свести к минимуму этот эффект, мост следует настраивать, когда двигатель находится при рабочей температуре.
Этот метод стабилизации скорости был популярным решением для регуляторов скорости вращения ротора регулятора, используемых в магнитофонах, использующих аналоговую электронику. В эпоху магнитофонов многие компании производили микросхемы для управления двигателем постоянного тока, чтобы лента двигалась с постоянной скоростью. Это было интересное решение, потому что оно работало линейно и не создавало шума, как контроллеры на основе ШИМ.
Это было интересное решение, потому что оно работало линейно и не создавало шума, как контроллеры на основе ШИМ.
Общие микросхемы включают LA5586, TDA7274, BA6220 и AN6550. К сожалению, производство большинства из них было снято с производства и теперь их можно приобрести только на вторичном рынке. Схемы в ИС немного отличались, но принцип работы по-прежнему основан на мостовой схеме выше.
LA5586 Эквивалентная цепь регулятора скорости двигателя и прикладная схема
Обратите внимание, что эквивалентная схема нарисована с источниками тока и постоянным коэффициентом тока. Коэффициент текущей ликвидности составляет от 20 до 40, в зависимости от конкретной ИС, и обозначен как K .В интегральных схемах легко сделать два источника тока с одинаковыми температурными параметрами.
Двигатель подключен к одной ветви моста, а вторая ветвь содержит резистор со значением K, в раз превышающим внутреннее сопротивление двигателя.
Цепь установившегося состояния для контроллера двигателя
В установившемся режиме ток двигателя в K в раз больше, чем ток через Rt . Отрицательный вход операционного усилителя подключен к источнику напряжения, поэтому падение напряжения на резисторе Rt всегда будет ниже, чем напряжение двигателя.Разница составит Vref . Напряжение в точке A (относительно земли) всегда будет выше, чем напряжение в точке B .
Отрицательный вход операционного усилителя подключен к источнику напряжения, поэтому падение напряжения на резисторе Rt всегда будет ниже, чем напряжение двигателя.Разница составит Vref . Напряжение в точке A (относительно земли) всегда будет выше, чем напряжение в точке B .
Без Rs , ток через Rt в 40 раз меньше тока двигателя. Когда нагрузка двигателя увеличивается, напряжение в точке B увеличивается, и выходное напряжение усилителя также увеличивается. Более высокое напряжение усилителя вызывает более высокий ток двигателя, что увеличивает крутящий момент двигателя.Регулирование скорости может быть достигнуто путем добавления шунтирующего сопротивления – напряжение между точками A и B всегда равно опорным напряжением, так что легко контролировать дополнительный ток добавлен к Rt.
Эта схема будет сбалансирована, когда напряжение двигателя равно сумме напряжений между Rt и Rs ( Vref ). Уравнение установившегося состояния:
Уравнение установившегося состояния:
$$ I_ {m} \ times R_ {m} + V_ {bemf} = R_ {T} \ times I_ {s} + R_ {T} \ times \ frac {I_ {s} + I_ {m}} { K} + V_ {ref} $$
Отсюда уравнение для обратной ЭДС:
$$ V_ {bemf} = V_ {ref} + (1+ \ frac {1} {K}) \ times R_ {T} \ times I_ {s} + \ frac {R_ {T}} {K – R_ {m}} \ times I_ {m} $$
Предполагая:
$$ K \ times R_ {m} = R_ {T} $$
, то количество оборотов, определенное Vbemf , составляет:
$$ V_ {bemf} = V_ {ref} + R_ {T} \ times (1+ \ frac {1} {K}) \ times I_ {s} $$
Важно, чтобы во всех случаях значение Rt было меньше K x Rm , иначе цепь будет чрезмерно компенсированной и нестабильной.
Аналоговый регулятор скорости с отрицательным сопротивлением
Увеличение нагрузки на двигатель приводит к увеличению потребляемого тока и падению скорости. Также уменьшается обратная ЭДС и напряжение на двигателе, этот метод управления известен как регулятор отрицательного вывода.
В этом случае мы используем операционный усилитель для управления скоростью, поэтому наша R_load будет на тысячи больше, чем другое сопротивление в этой цепи, и снова может быть опущена.
Из предыдущего раздела мы знаем, что напряжение источника питания не изменилось на В об / мин на , что позволяет нам запитать нашу схему от мощного операционного усилителя или добавить транзистор к выходу стандартного операционного усилителя. .Подключив инвертирующий вход к ножке моста между двигателем и последовательным резистором, мы можем управлять источником питания моста с помощью напряжения, подключенного к неинвертирующему выходу.
Цепь управления напряжением двигателя
Входное напряжение подается на неинвертирующий вход операционного усилителя, а инвертирующий вход подключается непосредственно к клемме двигателя. Мы пока не можем контролировать скорость с помощью схемы, в связи с чем наш усилитель работает как буфер (или повторитель напряжения) с коэффициентом усиления равным 1. По сути, входное напряжение определяет напряжение двигателя.
По сути, входное напряжение определяет напряжение двигателя.
Можно изменить скорость двигателя, задав напряжение Vin, но это не поддерживает постоянную скорость при изменении нагрузки. При постоянном входном напряжении двигатель будет вращаться быстрее при малых нагрузках и медленнее при увеличении нагрузки. Нам нужно еще несколько компонентов для стабилизации скорости двигателя.
Падение напряжения на Rs пропорционально падению напряжения на сопротивлении якоря двигателя, мы будем использовать это напряжение для компенсации падения напряжения на сопротивлении якоря.Это можно сделать, добавив модификацию схемы к приведенной ниже – добавив R1 и R2 и подключив их среднюю точку к неинвертирующему входу операционного усилителя.
Цепь регулятора скорости двигателя
Соотношение R1 и R2 должно быть таким же, как Rs и Ra для обеспечения стабилизации скорости. На изображении выше показана полная схема и ее эквивалент для руководства, управляющее напряжение должно быть таким же, как напряжение обратной ЭДС при желаемой скорости.
На изображении выше показана полная схема и ее эквивалент для руководства, управляющее напряжение должно быть таким же, как напряжение обратной ЭДС при желаемой скорости.
Коэффициент компенсации определяется значением Rs , но удобнее использовать стандартное значение сопротивления, а затем изменить R1 или R2 соответственно.
Если скорость двигателя уменьшается при приложении нагрузки, следует увеличить значение R2 (или уменьшить R1 ). Если скорость двигателя начинает колебаться (или имеет тенденцию к увеличению) при приложении нагрузки, следует уменьшить R2 или ( R1 следует увеличить).
Чтобы спроектировать эту схему, нам нужно знать, какое значение обратной ЭДС при желаемой скорости:
- Чтобы найти напряжение обратной ЭДС на желаемой скорости, вал двигателя может быть установлен на бурильщик и приведен в движение. После достижения желаемой скорости (проверенной тахометром) измерьте напряжение на клеммах двигателя с помощью вольтметра с высоким сопротивлением.

- Измерьте внутреннее сопротивление обмотки с помощью омметра на клеммах двигателя. Рекомендуется взять среднее значение из нескольких различных измерений положения ротора.
- Выберите значение Rs из стандартных значений, оно может быть меньше сопротивления двигателя.
- Выберите R1 и R2 , чтобы соотношение было таким же, как соотношение между Rs и Ra . Фактические значения резистора должны быть больше Rs и Ra для экономии тока. Поскольку эквивалентное сопротивление плеч моста будет другим, операционный усилитель должен быть с низким входным током.
- Подайте управляющее напряжение, равное желаемой обратной ЭДС.
- Проверить скорость и соответственно компенсировать (указано в абзаце перед этим списком).
Для температурной компенсации можно выбрать Rs с тем же температурным коэффициентом, что и обмотки двигателя – для меди это 3400 ppm. Этот резистор следует размещать как можно ближе к двигателю, чтобы поддерживать тот же температурный режим.
Этот резистор следует размещать как можно ближе к двигателю, чтобы поддерживать тот же температурный режим.
Простая схема стабилизации скорости двигателя также может быть выполнена только на транзисторах:
Транзисторный регулятор скорости
В этой схеме T2 работает как выходной каскад, а T1 как усилитель ошибки.Сигнал на коллекторе T1 является выходным сигналом, эмиттер работает как инвертирующий вход, а база как неинвертирующий вход.
Сигнал напряжения на двигателе подключен к неинвертирующему входу, потому что выходной каскад инвертирует этот сигнал, что означает, что больший сигнал на коллекторе вызывает меньший ток двигателя.
Диоды D1 и D2 сделать опорное напряжение, напряжение на Т1 эмиттера всегда ниже, чем напряжение на клеммах двигателя.Напряжение компенсации берется из R3 и вычитается из напряжения питания моста, которое измеряется делителем напряжения R4 , R5 и R1 .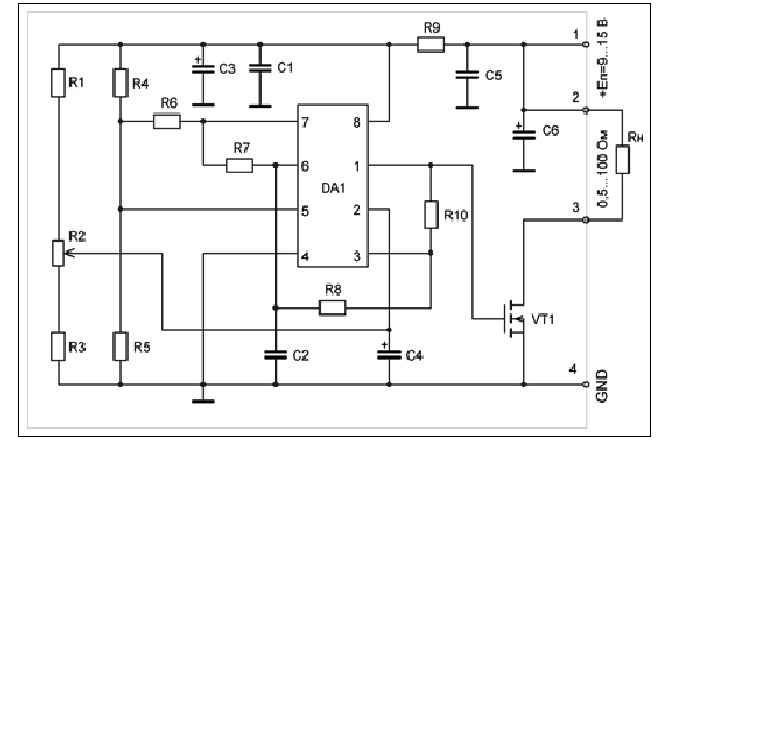
R7 и C2 – это схема запуска, помогающая преодолеть статическое трение, а C1 – конденсатор компенсации частоты, предотвращающий высокочастотные колебания.
Поскольку нам необходимо точное измерение обратной ЭДС, которое зависит от контактного сопротивления между коммутатором и щетками, лучше всего использовать двигатели с металлическими щетками.Большинство двигателей Precision Microdrive имеют металлические щетки и подходят для этого метода управления скоростью.
Регулятор скорости со специализированным IC
Эта схема основана на AN6651, специализированном контроллере двигателя, который ранее был популярен в магнитофонах.
132-100 и AN6651 Цепь регулятора скорости
AN6651 работает по тому же принципу, что и описанный выше LA5586. Контакты 2 и 4 являются выходами источника тока, соотношение между управляющим выходом (контакт 2) и выходом двигателя (контакт 4) составляет 40: 1.
Сопротивление R1 , подключенное между контактом 2 и источником питания, должно быть в 40 раз больше внутреннего сопротивления двигателя для того же падения напряжения на R1 , что и на внутреннем сопротивлении двигателя:
$$ K = 40 $$
$$ R_ {1} = K \ times R_ {m} $$
Например, используя стандартное значение 390 Ом для R1 (более низкое значение снижает тенденцию к возникновению колебаний), нам нужно найти значения для последовательного соединения R2 и R3. Давайте возьмем двигатель постоянного тока 132-100 и установим целевую скорость 2400 об / мин.Для начала нам нужны некоторые технические детали:
- Сопротивление двигателя, \ (R_ {m} = 10 \ Omega \)
- Входное напряжение без нагрузки при скорости 2400 об / мин, \ (V_ {m} = 3,87 В \)
- Ток без нагрузки при скорости 2400 об / мин, \ (I_ {m} = 23 мА \)
Мы можем рассчитать падение напряжения на внутреннем сопротивлении как:
$$ 23мА \ раз 10 \ Омега = 0,23 В $$
, и мы также можем рассчитать Vbemf как:
$$ 3,87 В- 0,23 В = 3.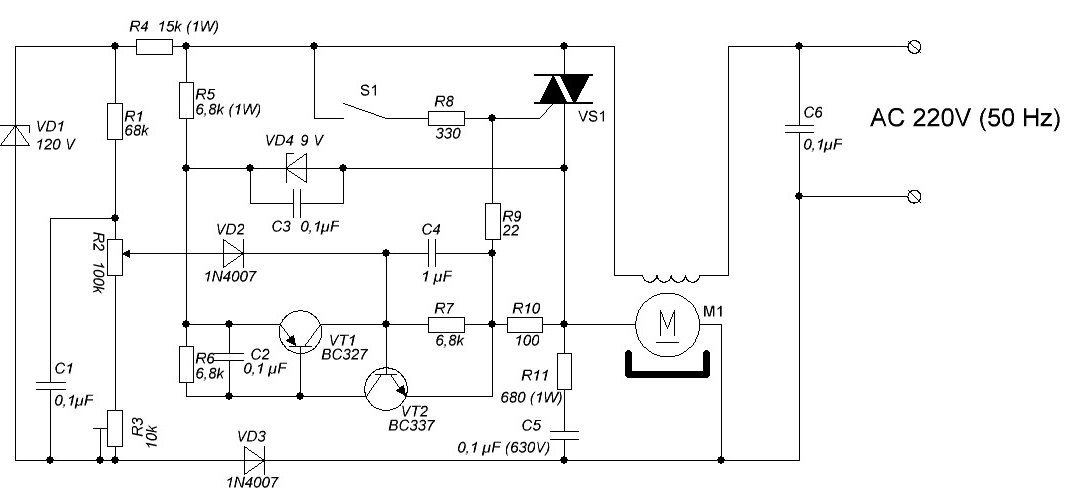 65 В $$
65 В $$
В установившемся режиме, когда цепь сбалансирована, уравнение для цепи:
$$ I_ {m} \ times R_ {m} + V_ {bemf} = R_ {1} \ times (I_ {R2R3} + \ frac {I_ {R2R3} + Im} {K} + V_ {ref} $ $
Из этого уравнения мы можем рассчитать обратную ЭДС:
$$ V_ {bemf} = V_ {ref} + R_ {1} \ times (1+ \ frac {1} {40}) \ times I_ {R2R3} $$
Как мы знаем из даташита Vref = 1V, значит:
$$ I_ {R2R3} = \ frac {V_ {bemf} – V_ {ref}} {R_ {1} \ times (1+ \ frac {1} {40})} $$
На наш мотор у нас:
$$ I_ {R2R3} = \ frac {3.64 – 1} {390 \ times (1 + \ frac {1} {40})} $$
$$ I_ {R2R3} = 0,0051 А = 5,1 мА $$
С помощью этого значения мы можем рассчитать последовательное сопротивление R2 и R3 :
$$ I_ {R2R3} = \ frac {V_ {ref}} {R2 + R3} $$
$$ R_ {2} + R_ {3} = \ frac {V_ {ref}} {I_ {R2R3}} $$
$$ R_ {2} + R_ {3} = 195 \ Omega $$
Мы можем использовать постоянный стандартный резистор 150 Ом плюс потенциометр 100 Ом, что дает нам диапазон для точной настройки. Вычисленные значения являются лишь приближением, в реальной схеме ток внутреннего опорного напряжения источника также является значительным (в диапазоне от 0.8 – 2 мА для AN6651), это вызовет изменение тока двигателя.
Вычисленные значения являются лишь приближением, в реальной схеме ток внутреннего опорного напряжения источника также является значительным (в диапазоне от 0.8 – 2 мА для AN6651), это вызовет изменение тока двигателя.
Добавление потенциометра позволяет системе регулировать скорость, и ее следует откалибровать через некоторое время, чтобы двигатель прогрелся до рабочей температуры, чтобы минимизировать результирующий сдвиг сопротивления.
Прецизионные микроприводы 132-100 PCB с AN6651
Прецизионные микроприводы 132-100 PCB с AN6651
Регулятор скорости с дискретным операционным усилителем
Это улучшенная версия схемы операционного усилителя, описанной выше, с использованием специальной ИС.Основное улучшение низкое рабочее напряжение, благодаря использованию зонного опорного низкого напряжения. Использование этого дискретного компонента минимизирует размер схемы, что идеально подходит для современных небольших корпусов.
Схема на основе ОУ стабилизации скорости двигателя
В этой схеме напряжение компенсации снимается с последовательного резистора R8 , значение которого меньше внутреннего сопротивления двигателя, чтобы уменьшить потери мощности. Вторая опора моста образована из R6 и R7 .Соотношение этих резисторов должно быть таким же, как R8 и сопротивление обмотки двигателя. R8 можно выбрать в качестве типичного значения, тогда R6 и R7 следует выбрать для компенсации внутреннего падения напряжения. Для стабильной работы коэффициент R7 / R6 должен быть больше Rm / R8 .
Эта схема должна подходить для небольших двигателей с номинальным напряжением 1 В ~ 2 В.
Схема стабилизации на основе прецизионных микроприводов ОУ
Регулятор скорости на транзисторах
Двухтранзисторный регулятор скорости двигателя
Эта недорогая схема построена на транзисторах для управления скоростью двигателя, хотя она не обеспечивает такой же точности, как операционный усилитель, ее можно сделать очень маленькой и полезной для недорогих приложений.
В этой схеме, опорное напряжение 1,2 В и D1 работают как опорное напряжение. Двигатель обратной ЭДС больше, чем опорное напряжение – зависит от R2 , R3 , и R4 делитель напряжения :
- Во-первых, необходимо установить фактор делителя напряжения, наше опорное напряжение 1,2 В, и, когда желаемое обратно ЭДС 3,6 В делитель напряжения R2, , R3 и R4 должны иметь коэффициент: \ ( \ frac {3.6} {1.2} = 3 \)
- Итак, у нас есть максимальный диапазон для точной настройки схемы, это нужно делать, когда потенциометр ( R3 ) находится в среднем положении. Теперь нам нужно разделить оставшееся значение между каждым из других резисторов.
- Когда мы знаем коэффициент делителя напряжения, выбрать R6 и R8 легко. Нам нужно иметь такое же соотношение между делителем напряжения R6 , R8 и внутренним сопротивлением двигателя.

Эта схема предназначена для одной постоянной скорости, и изменение скорости с помощью триммера влияет на компенсацию скорости.Таким образом, триммер следует использовать только для настройки этой схемы в очень низких диапазонах скорости. Для использования этой схемы с широким диапазоном настройки скорости нам необходимо внести некоторые изменения:
Трехтранзисторный регулятор скорости двигателя
Эта схема работает по тем же правилам, что и предыдущие два транзистора версии, но главное усовершенствование увеличения коэффициента усиления для опорного напряжения на транзистор Q2 . Это позволяет использовать MicroPower зонного опорного напряжения, который является более стабильным, чем стандартные диоды.Еще одно улучшение от добавления Q2 – это температурная компенсация Vbe между транзисторами Q1 и Q2 .
Расчет этой схемы начинается с задания напряжения обратной ЭДС. В этой схеме, опорное напряжение равно LM385 – 2,5 В и напряжение Vbe из Q2 :
В этой схеме, опорное напряжение равно LM385 – 2,5 В и напряжение Vbe из Q2 :
$$ V_ {ref} = V_ {bg_ {ref}} + V_ {be} = 1,2 В + 0,7 В = 1,9 В $$
Если нам нужно, чтобы Vbemf было 3,8 В, коэффициент делителя напряжения R2 , R4 и R3 должен быть 2: 1.Потенциометр ( R3 ) предназначен для точной настройки этого напряжения, но в этой схеме изменение скорости с помощью триммера вызовет изменение компенсации. Таким образом, R3 предназначен только для окончательной настройки скорости в небольшом диапазоне, скажем, 5% или меньше, и должен использоваться только для компенсации допуска других значений компонентов.
После установки этого делителя напряжения выбрать значение R6 и R7 легко, когда мы знаем внутреннее сопротивление двигателя. Эквивалентное параллельное соединение R6 , R7 и сопротивление двигателя должно иметь такое же соотношение, что и делитель напряжения R2 , R3 и R4 (с потенциометром R3 , установленным в среднее положение).
Прецизионные микроприводы Трехтранзисторный контроллер скорости двигателя
Прецизионные микроприводы Трехтранзисторный контроллер скорости двигателя
Аналоговый регулятор скорости переключения режимов
В этом примечании к применению описывается простая реализация аналогового регулятора скорости двигателя, основанная на измерении обратной ЭДС и управляющем сигнале ШИМ.
При использовании ШИМ с двигателем постоянного тока все еще можно управлять скоростью двигателя без каких-либо датчиков. Используя типичный недорогой драйвер с одним полевым МОП-транзистором, можно измерить обратную ЭДС, когда двигатель вращается, а транзистор выключен.
Управление скоростью двигателя с помощью обратной ЭДС в режиме переключения аналоговой цепи
Этот контроллер состоит из ШИМ-модулятора, выходного транзистора и схемы «выборки и удержания» (иногда известной как схемы «следование и удержание»). Модулятор PWM имеет управляющий вход, который позволяет изменять рабочий цикл.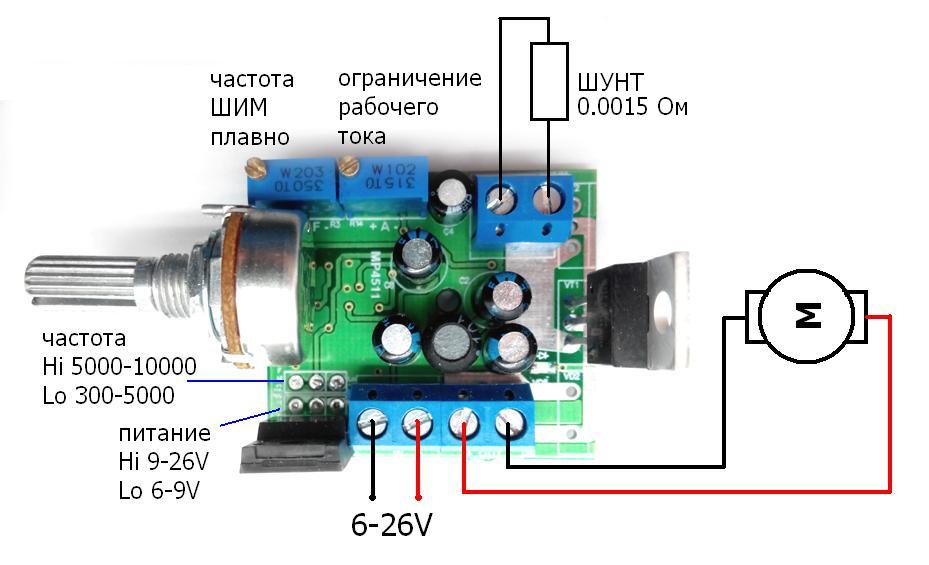 Если вы не знакомы, это может показаться сложным, но общая идея довольно проста:
Если вы не знакомы, это может показаться сложным, но общая идея довольно проста:
- когда транзистор включен, напряжение питания подключено к клеммам двигателя, ток двигателя Im протекает через двигатель, заставляя его ускоряться
- , когда транзистор выключен, двигатель действует как генератор, а Vm равно Vbemf , что пропорционально скорости двигателя.Срабатывает схема выборки и хранения, которая сохраняет выборку Vbemf в конденсаторе .
Узел суммирования затем вычисляет разницу между желаемой скоростью и текущей скоростью, поскольку обе представлены напряжением (желаемое напряжение и Vbemf , соответственно). Это напряжение ошибки используется для управления скоростью двигателя путем увеличения или уменьшения рабочего цикла модулятора ШИМ.
Из-за индуктивного характера двигателей постоянного тока измерение обратной ЭДС невозможно сразу после выключения транзистора. Когда транзистор переключается, возникает сильный индуктивный выброс, и индуктивный рециркуляционный ток Ir течет через реверсивный диод. Необходима небольшая задержка, пока напряжение обратной ЭДС не станет стабильным:
Когда транзистор переключается, возникает сильный индуктивный выброс, и индуктивный рециркуляционный ток Ir течет через реверсивный диод. Необходима небольшая задержка, пока напряжение обратной ЭДС не станет стабильным:
Измерение сигнала ШИМ на клеммах двигателя
Этот метод управления может быть выполнен с использованием только аналоговых компонентов или с помощью цифрового микроконтроллера. Практическая реализация контроллера, основанного на этом методе и использующего двигатель постоянного тока 132-100, показана ниже:
Регулятор скорости двигателя на основе измерения обратной ЭДС и выхода ШИМ
В этой схеме напряжение на R2 представляет желаемую скорость, IC1A работает как усилитель ошибки и ПИД-регулятор.
Схема ШИМ-модулятора построена на IC1B и IC2 , где IC1B работает как генератор треугольных волн с частотой, определяемой R12 и C4 .
IC2 действует как компаратор, который сравнивает напряжение треугольного сигнала с выхода IC2 с установочным напряжением от потенциометра R15 . Когда напряжение сигнала треугольника ниже, чем напряжение от R15 , выход компаратора высокий и двигатель запитан.
Цепь выборки и хранения состоит из C3 , R10 , D2 , Q1 , R13 . Когда двигатель запитан от T1 , Q2 включен, а узел R13 и D2 замкнут на землю, что не позволяет ему сделать выборку, когда Vcc подается на двигатель. Диод D2 предотвращает разряд C3 , когда Q1 включен.
Когда T1 выключен, Q2 также выключен, и Vbemf может заряжать конденсатор C3 .Напряжение на C3 находится на неинвертирующем входе усилителя ошибки, IC1A . Этот усилитель вычитает текущее напряжение скорости из желаемого напряжения скорости (устанавливается потенциометром R2 ). При увеличении обратной ЭДС выходное напряжение на IC1A также увеличивается – это сдвигает уровень сигнала треугольника вверх пропорционально ошибке скорости. Если уровень сигнала треугольника увеличивается, то время, когда выходной транзистор включен, уменьшается, и коэффициент заполнения ШИМ также уменьшается.
Этот усилитель вычитает текущее напряжение скорости из желаемого напряжения скорости (устанавливается потенциометром R2 ). При увеличении обратной ЭДС выходное напряжение на IC1A также увеличивается – это сдвигает уровень сигнала треугольника вверх пропорционально ошибке скорости. Если уровень сигнала треугольника увеличивается, то время, когда выходной транзистор включен, уменьшается, и коэффициент заполнения ШИМ также уменьшается.
Этот усилитель ошибки работает как схема ПИД-регулирования, где коэффициент усиления определяется как \ (\ frac {R_ {5}} {R_ {5} + R_ {10}} \), а постоянная времени определяется как R5 и C2 .
Схема выборки и хранения очень проста, потому что время выборки равно состоянию выключения в рабочем цикле ШИМ, поэтому напряжение выборки напрямую зависит от рабочего цикла. Кроме того, это менее важно, если схема используется для управления приложением, которое не использует полный диапазон скорости двигателя. Его также можно уменьшить по выбору, изменив значения R10 , C3 и R13 , которые позволяют изменять время заряда / разряда C3 .
Его также можно уменьшить по выбору, изменив значения R10 , C3 и R13 , которые позволяют изменять время заряда / разряда C3 .
Диапазон изменения рабочего цикла ШИМ (от приложенного напряжения ошибки) определяется соотношением R7 до R8 || R9 , однако, поскольку схема Sample & Hold настолько проста, этот диапазон не должен быть очень широким.
Эта схема предназначена для работы в малом диапазоне ШИМ, максимальная нагрузка ШИМ снижается за счет задержки индуктивной нагрузки двигателя, и с ограничением схемы выборки и удержания этот метод не следует использовать для широкого диапазона. диапазон регулирования скорости.
Это демонстрирует принцип работы, поэтому для реального использования настоятельно рекомендуется улучшить простую схему выборки и хранения. Например, схема на базе недорогого LF398 может обеспечить время выборки 10 мкс.
По сравнению с аналоговой схемой отрицательной обратной связи этот метод:
- снижает потери мощности
- может быть более стабильным, так как температура не влияет на напряжение обратной ЭДС (за счет изменения сопротивления обмотки)
Однако это также:
- не подходит для двигателей с высокой индуктивностью
- имеет узкий диапазон регулирования скорости
- имеет склонность к колебаниям
Регулятор скорости с аналоговым переключением на двигателе постоянного тока 132-100
Использование частотно-регулируемого привода для снижения потребления энергии пылесборником
Пылесборники потребляют электроэнергию в течение всего времени работы, но большая часть электрической нагрузки приходится на двигатель вентилятора, который перемещает воздух через систему. Частотно-регулируемый привод (VFD) может минимизировать энергию, потребляемую двигателем вентилятора.
Частотно-регулируемый привод (VFD) может минимизировать энергию, потребляемую двигателем вентилятора.
Потребление энергии прямо пропорционально объему воздуха (или куб. Футов в минуту), который двигатель перемещает через систему. Пылесборники – это изменяемые системы. Их сопротивление воздушному потоку (падение давления) меняется со временем в зависимости от того, насколько заполнены фильтрующие картриджи пылью.
Без какого-либо вмешательства на начальных этапах срока службы фильтров, когда статическое давление на них низкое, вентилятор будет перемещать больше воздуха, чем необходимо.Это потребляет ненужную энергию, а также приводит к попаданию воздуха в фильтры с высокой скоростью, что сокращает срок службы фильтра.
На поздних стадиях срока службы фильтров, когда они загружены частицами пыли, воздушный поток становится ограниченным, и вентилятор должен работать более интенсивно, чтобы поддерживать достаточно высокий воздушный поток, чтобы улавливать частицы пыли. Это увеличивает статическое давление, также называемое падением давления, которое измеряется в дюймах водяного столба. На этом этапе необходимо отрегулировать воздушный поток, чтобы избежать чрезмерного потребления энергии.Это можно сделать вручную или путем установки частотно-регулируемого привода (ЧРП).
Это увеличивает статическое давление, также называемое падением давления, которое измеряется в дюймах водяного столба. На этом этапе необходимо отрегулировать воздушный поток, чтобы избежать чрезмерного потребления энергии.Это можно сделать вручную или путем установки частотно-регулируемого привода (ЧРП).
В пылеуловителях обычно используется демпфер на выходе из двигателя вентилятора для механического изменения статического давления системы. Один из вариантов изменения воздушного потока – вручную отрегулировать эти заслонки. Когда фильтры новые, заслонку можно закрыть еще больше для достижения желаемого потока воздуха. По мере загрязнения фильтров заслонку можно открыть больше, чтобы увеличить поток воздуха.
Этот рисунок иллюстрирует типичную взаимосвязь между вентилятором с постоянной скоростью вращения и потреблением энергии при использовании выпускной заслонки для механического регулирования статического давления в системе.
Лучшим вариантом является использование частотно-регулируемого привода для электрического управления скоростью вентилятора. ЧРП – это электрическое устройство, которое автоматически регулирует частоту и потребляемую мощность двигателя вентилятора. Обычное человеческое взаимодействие больше не требуется.ЧРП, оснащенный датчиком воздушного потока или статического давления, автоматически определяет изменения воздушного потока и падения давления и регулирует скорость вращения вентилятора, чтобы вернуть систему к оптимальному потоку воздуха. Операторы достигают значительной экономии электроэнергии в долгосрочной перспективе, поскольку количество энергии, необходимое для работы двигателя вентилятора, зависит от скорости.
Когда фильтры новые, привод снижает скорость вентилятора, чтобы получить желаемый воздушный поток. Когда фильтры забиваются пылью, привод ускоряет вентилятор, чтобы поддерживать постоянный поток воздуха. Электрическое управление намного более эффективно, чем вмешательство человека, в поддержании желаемого воздушного потока и минимизации потребляемой электроэнергии.
Электрическое управление намного более эффективно, чем вмешательство человека, в поддержании желаемого воздушного потока и минимизации потребляемой электроэнергии.
Регулировка частоты входящей мощности – эффективный способ изменить скорость двигателя вентилятора, поскольку их соотношение прямо пропорционально. Например, частотно-регулируемый привод может заменить двигатель, который работает со скоростью 3600 об / мин при 60 Гц, на работу со скоростью 1800 об / мин при 30 Гц. Вентилятор потребляет только количество энергии, необходимое для конкретной скорости вентилятора. Например, вентилятор, который работает на 25% медленнее, будет использовать 42% мощности, необходимой для полной скорости.Тот же вентилятор, работающий на 50% медленнее, будет использовать 12% мощности на полной скорости.
Суть в том, что частотно-регулируемые приводы позволяют пользователям сэкономить в среднем 30% затрат на электроэнергию для эксплуатации пылесборника. Кроме того, снижаются затраты на техническое обслуживание и эксплуатацию, поскольку для регулировки скорости вращения вентилятора не требуется вмешательства человека.
Рисунок справа иллюстрирует множественные отношения, которые определяют количество энергии, используемой на разных скоростях. Эти графики были взяты из 26-го издания Руководства по промышленной вентиляции, рекомендованного для проектирования, рисунок 7-9b).Было доказано, что преобразователи частоты экономят в среднем 4 дюйма вод. Ст. статического давления в течение срока службы фильтров. Дополнительная экономия капитальных затрат, возможная за счет установки частотно-регулируемого привода в системе пылеулавливания, будет зависеть от различных приложений. Однако окупаемость инвестиций обычно составляет менее года.
Рассмотрим этот пример У вас есть пылеуловитель с двигателем мощностью 50 л.с., работающим с КПД 85%, 460 В, частотой 60 Гц, током полной нагрузки 57 А и 1500 об / мин.Если частотно-регулируемый привод работает круглосуточно, без выходных, коллектор будет использовать мощность 38,6 кВт при полной нагрузке. Если тариф на электроэнергию составляет 0,10 доллара за кВт / ч, то эксплуатация коллектора будет стоить 33 776 долларов в год. При установке частотно-регулируемого привода (ориентировочная стоимость 11 000 долларов США) тот же пылеуловитель будет стоить 17 012 долларов в год, что позволит сэкономить 16 763 долларов в год. VFD окупится менее чем за 8 месяцев.
При установке частотно-регулируемого привода (ориентировочная стоимость 11 000 долларов США) тот же пылеуловитель будет стоить 17 012 долларов в год, что позволит сэкономить 16 763 долларов в год. VFD окупится менее чем за 8 месяцев.
2114 – Контроль скорости двигателя для больших двигателей постоянного тока
2114 – Контроль скорости двигателя для больших двигателей постоянного тока – доктор Годфрид-Виллем РаесДр.Годфрид-Виллем RAES
Kursus Experimentele Muziek : Boekdeel 2: Живая электроника
Hogeschool Gent: Отделение музыки и драмы
2114:
Приложение
<Контроль скорости больших двигателей постоянного тока>
Скорость коллекторного двигателя постоянного тока (щеточного двигателя) зависит от приложенного напряжения.
Крутящий момент является функцией тока двигателя, поэтому его невозможно снизить.
скорость без снижения крутящего момента.Для более крупных двигателей требуются довольно большие токи,
которые трудно контролировать с помощью схемы регулирования тока или напряжения.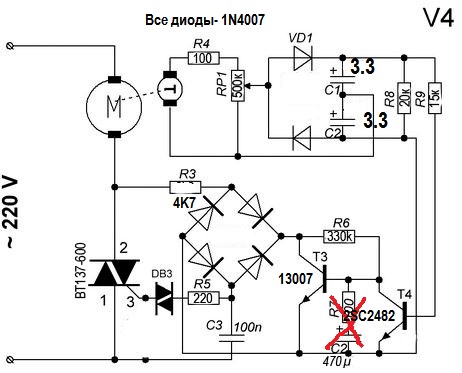 ШИМ – стандартный ответ на проблемы, но у него есть свои хитрости: если
частота модулированной волны слишком низкая (ниже звука), двигатель станет
здоровенный источник звука и поэтому делает музыкальные приложения (автоматизированные инструменты)
почти невозможно. С другой стороны, если вы возьмете частоту намного выше звука,
тепло, выделяемое в силовых Мосфетах, может иметь тенденцию становиться недопустимым.Также
– важное соображение для наших собственных выступлений с использованием сонарных версий
мой невидимый инструмент – будет много ультразвукового шума, создающего сонар
невозможно.
ШИМ – стандартный ответ на проблемы, но у него есть свои хитрости: если
частота модулированной волны слишком низкая (ниже звука), двигатель станет
здоровенный источник звука и поэтому делает музыкальные приложения (автоматизированные инструменты)
почти невозможно. С другой стороны, если вы возьмете частоту намного выше звука,
тепло, выделяемое в силовых Мосфетах, может иметь тенденцию становиться недопустимым.Также
– важное соображение для наших собственных выступлений с использованием сонарных версий
мой невидимый инструмент – будет много ультразвукового шума, создающего сонар
невозможно.
Итак, мы пришли к совершенно другому подходу: вместо регулирования
источник питания постоянного тока с использованием последовательного транзистора, IGTB или mosfet, мы разработали простой
схема, регулирующая подачу переменного тока с помощью полупроводникового симистора тиристора
модули. Мы использовали твердотельные реле Crouzet с диапазоном входа управляющего переключателя
от 3 до 32 В постоянного тока и мощность выходного переключателя до 10 А при минимальном переменном напряжении
24В.
The Basic Stamp, микроконтроллер PIC, считывает байт из входного порта и преобразует это в периодический импульс на выходном контакте 20. Минимальное время включения должно быть 10 мс (для сети 50 Гц), а время включения / выключения этого сигнала будет определять среднее напряжение, воспринимаемое двигателем. Только твердотельные реле по нулевым переходам переменного напряжения. На частоте 50 Гц таких крестиков 100 в секунду. Итак, если мы пропустим только 1 полуволну в секунду, выходное напряжение будет 1%. максимального значения.Если у двигателя очень малая масса, вам следует использовать очень большой сглаживающий конденсатор над двигателем. Если двигатель имеет большую массу или двигается какой-то маховик (например, большой вентилятор), чем емкость конденсатора приниматься очень низко.
Это, очевидно, помогает для плавной работы двигателя, для распределения импульсов включения / выключения. равномерно в течение периода употребления. Итак, для мощности 25% должна быть следующая схема используемый:
1000100010001000100010001000100010001000 . …
Для 50%:
1100110011001100110011001100110011001100…, каждый бит соответствует длительности 10 мс.
Выходной контакт 19 управляет реле, используемым для управления направлением вращения двигателя (CW / CWW). Контакт 13 показан подключенным к другому реле, с помощью которого вся цепь питания двигателя может быть включена или выключена.
И твердотельное реле, и мостовой выпрямитель следует устанавливать на большой радиатор.
последнее обновление: 2015-04-26
| Предназначен для управления скоростью: | ||
Эти элементы управления обеспечивают бесступенчатую регулировку скорости для двигателей с экранированными полюсами и двигателей PSC. | |||
| Примечание относительно регуляторов скорости: В связи с тем, что все больше и больше людей используют дровяные печи во время обогрева, возникают некоторые проблемы, связанные с регуляторами скорости, которые изменяют выход воздуха из центробежных нагнетателей.  На односкоростной воздуходувке регулятор скорости, соединенный последовательно с горячей линией, позволит пользователю контролировать скорость нагнетателя. Многие регуляторы скорости не снижают напряжение ниже 60 и не позволяют колесу замедляться до 0 об / мин.Кроме того, комбинация нагнетателя и регулятора скорости часто может приводить к так называемому «гармоническому шуму» – странным вибрациям и / или шумам в устройстве заказчика. Слегка увеличив или уменьшив скорость нагнетателя, иногда можно устранить эту проблему , но часто она не устраняется на 100%. Также следует проявлять осторожность при применении полупроводниковых устройств контроля скорости, поскольку они часто устанавливаются в общую линию или в установку неполяризованных вилок. Таким образом, даже несмотря на то, что двигатель может не вращаться из-за того, что регулятор скорости установлен слишком низко для работы двигателя, электричество все еще подключено к регулятору скорости, и существует потенциальная опасность поражения электрическим током.  Наконец, не используйте переключатели регулировки света в качестве регуляторов скорости центробежного вентилятора. Элементы управления Наконец, не используйте переключатели регулировки света в качестве регуляторов скорости центробежного вентилятора. Элементы управления должны быть одобрены для использования с двигателями этих устройств. | |||
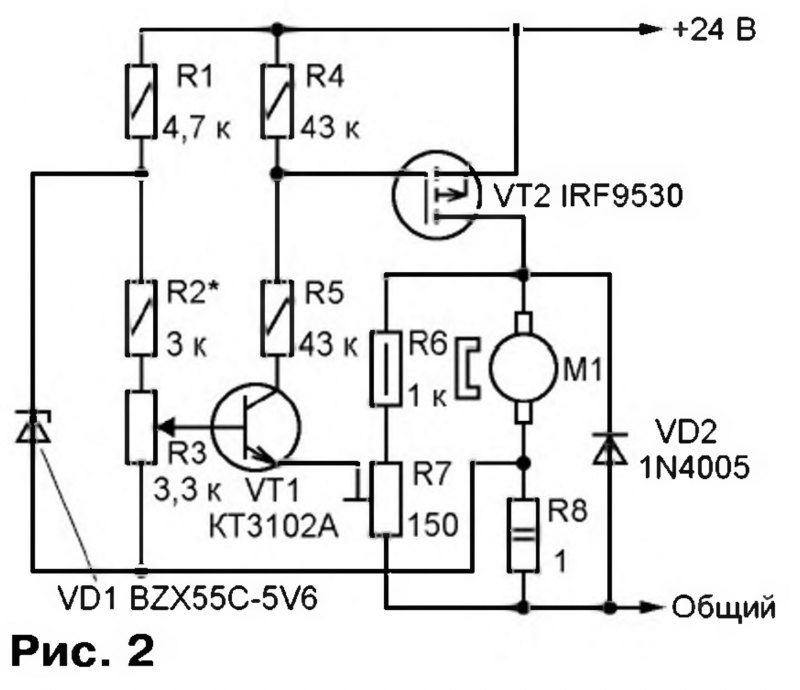
Как интегрировать управление скоростью двигателя для двигателей насосов в медицинские устройства | Прецизионная гидродинамика
Миниатюрный размер, легкий вес и низкое энергопотребление в сочетании с возможностями интеграции насосных и моторных агрегатов в медицинские устройства обеспечивают идеальное решение для инженеров-проектировщиков.Теперь они могут разработать более портативное устройство, которое соответствует всем требованиям их клиентов в корпусе, занимающем меньше места. Следующая задача – реализовать.
От дизайна к интеграции
Четыре наиболее распространенных метода управления скоростью двигателя / насоса для двигателей постоянного тока с постоянным магнитом с железным сердечником (PMDC) (часто называемых «щеточным двигателем»), бесщеточных двигателей постоянного тока и бесщеточных двигателей постоянного тока (BLDC) обсуждаются в наш недавний пост Мини-субкомпоненты для медицинских устройств имеют большое значение в дизайне .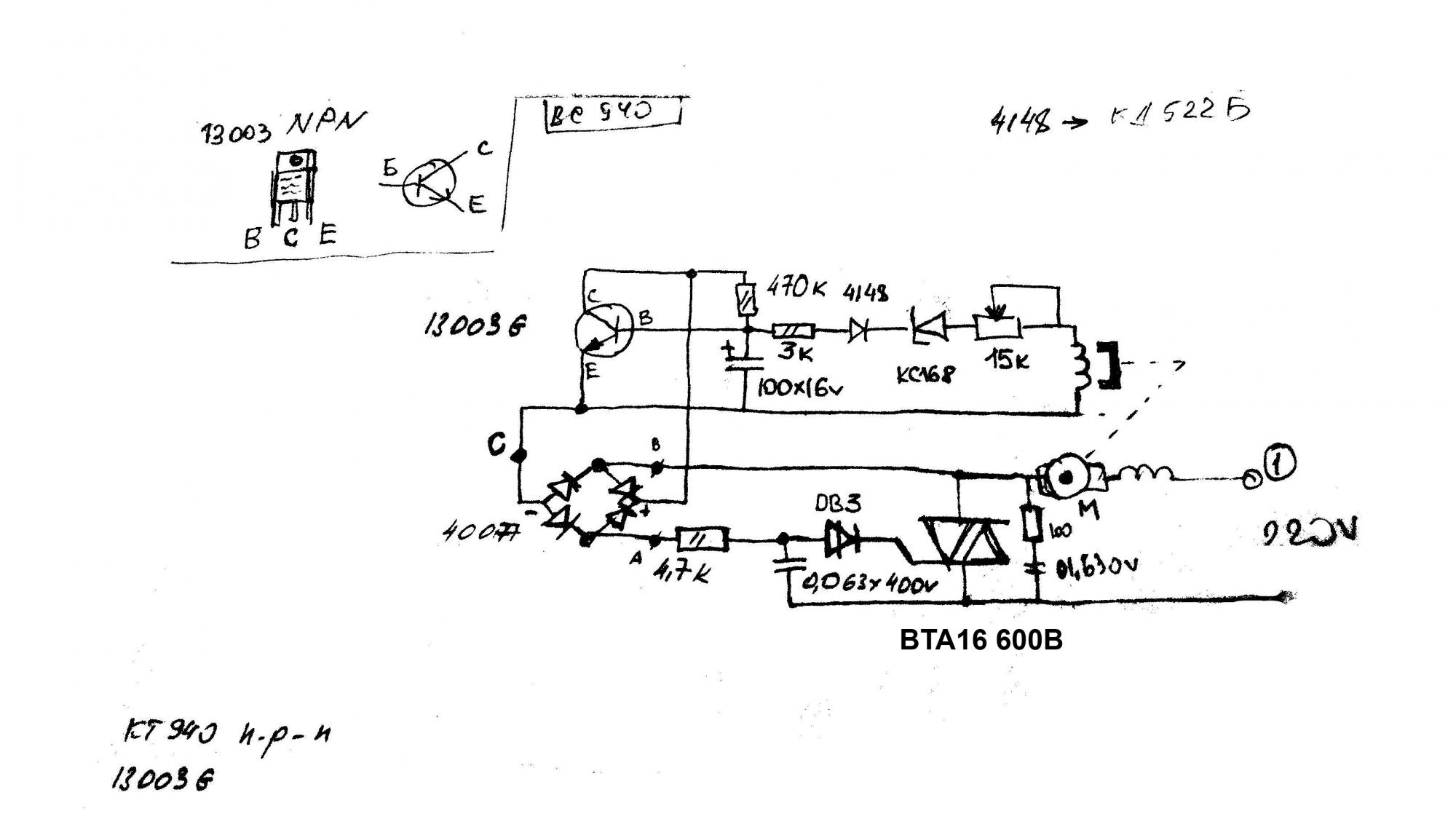
Правильная интеграция управления скоростью двигателя
Следующие ниже подробные описания помогут правильно интегрировать управление скоростью двигателя с любым выбранным вариантом. Хотя внешнее управление ШИМ предпочтительнее, когда требуется регулирование скорости, производители оригинального оборудования должны выбрать лучший стиль управления для своего приложения. Следующие ниже подробные описания помогут правильно интегрировать управление скоростью двигателя с любым выбранным вариантом.
Входное напряжение ШИМ (кисть или BLDC)
Этот метод, часто называемый «2-проводным» ШИМ, является одним из простейших методов управления скоростью насоса в устройстве. Основное требование к устройству заказчика – сигнал ШИМ, часто генерируемый микроконтроллером и силовым транзистором. Входное напряжение двигателя включается и выключается с высокой частотой, так что средняя мощность двигателя снижается. На следующем изображении показан пример драйвера ШИМ «низкого уровня», в котором земля на двигатель переключается с помощью «платы заказчика» для снижения скорости.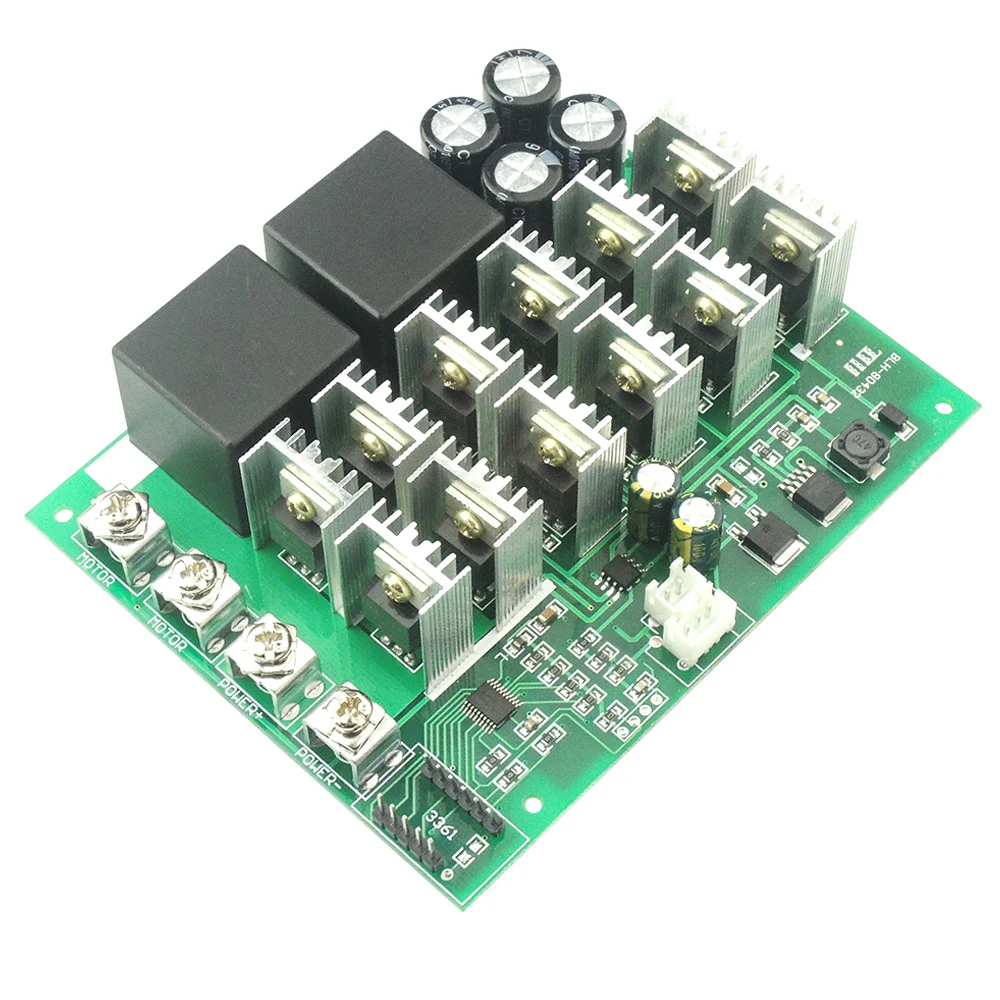
Для щеточных двигателей наиболее распространенным и очень эффективным методом управления является 2-проводная ШИМ. Он также эффективен с двигателями BLDC; однако он имеет некоторые ограничения. Многие двигатели BLDC имеют внутренний контроллер, который для правильной работы должен поддерживать минимальное напряжение. Применение цикла ШИМ к входному напряжению также снижает эффективное напряжение на электронике контроллера; это ограничивает доступный диапазон регулирования скорости. Использование внешнего ШИМ-управления может обеспечить больший диапазон в этой ситуации.
Внешний ШИМ (только BLDC)
Это рекомендуемый метод управления скоростью диафрагменного насоса BLDC, когда это возможно. Этот метод обеспечивает наиболее динамичное управление насосом, а в некоторых случаях может также упростить электрическую схему инженера, поскольку для сигнала переключения требуется только слаботочный транзистор.
Для большинства мембранных насосов с внешним ШИМ требуется схема с «открытым стоком» или «открытым коллектором» на печатной плате устройства OEM-разработчика для обеспечения сигнала ШИМ. Двигатели BLDC имеют внутренний подтягивающий резистор, поэтому схемы с открытым стоком или открытым коллектором будут активно подводить это напряжение к земле для низкой части сигнала ШИМ. На следующих рисунках показаны примеры рекомендуемых схем.
Примеры цепей с открытым стоком / открытым коллектором
Аналоговый вход скорости 0–5 В пост. Тока (только BLDC)
В некоторых приложениях сигнал ШИМ невозможен или не является предпочтительным для разработчика системы. Многие двигатели BLDC имеют вход для внешнего аналогового сигнала постоянного тока.В этом случае на двигатель подается постоянное напряжение для работы, но отдельный вход низкого тока от 0 до 5 В постоянного тока (желтый провод) регулирует скорость насоса.
Фактический диапазон управляющего напряжения может варьироваться в зависимости от двигателя; однако концепция та же: сигнал 0 В постоянного тока отключит двигатель, 5 В постоянного тока будет соответствовать полной скорости, а диапазон между 0 и 5 В постоянного тока будет регулировать скорость насоса.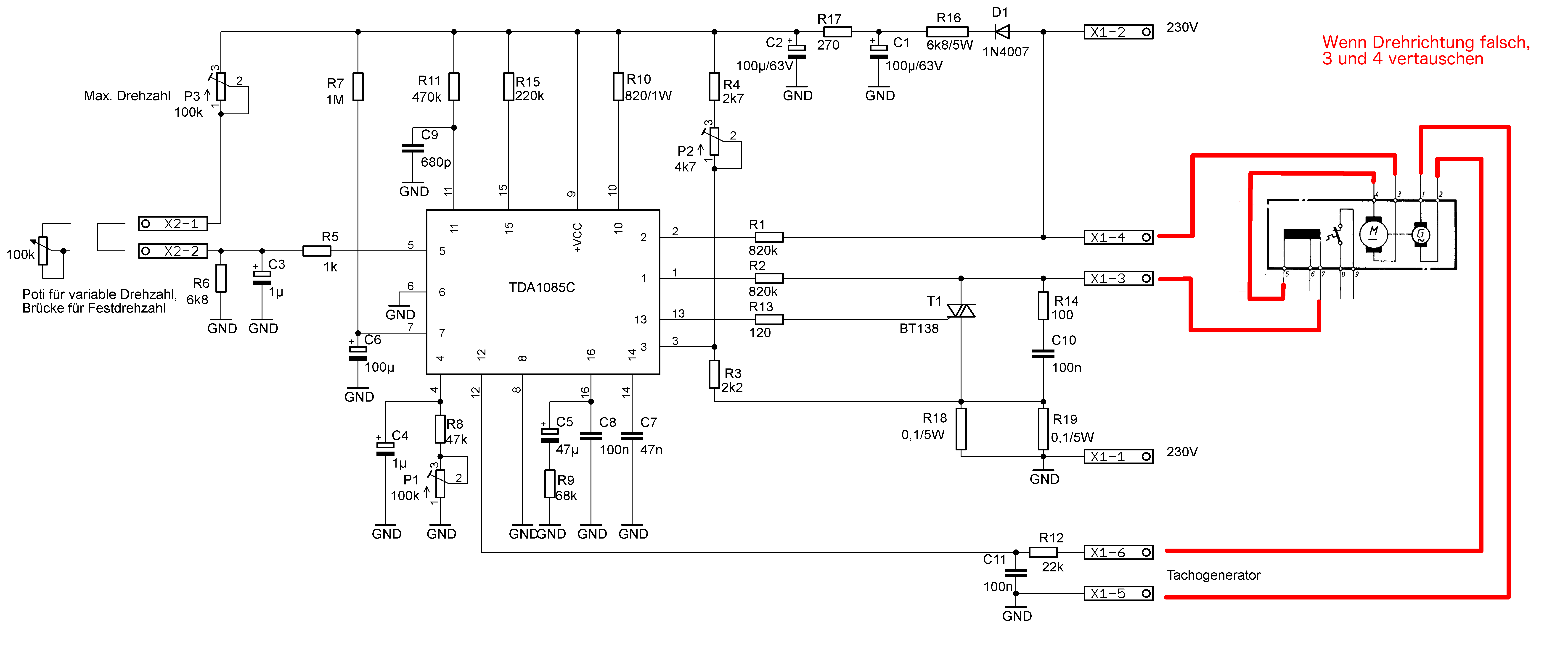
Контроль скорости – тахометр
Многие двигатели BLDC также могут выдавать сигнал тахометра, чтобы устройство инженера могло контролировать фактическую скорость насоса.Сигнал представляет собой цифровой импульс, который можно использовать для определения скорости насоса.
Это полезно в приложениях, где насос должен работать очень медленно; с помощью этой информации контроллер устройства может увеличить скорость, если насос начинает останавливаться (то есть скорость насоса приближается к нулю). Он также обеспечивает дополнительную обратную связь по безопасности и / или диагностике для подтверждения правильного функционирования системы.
Проблемы проектирования: управляющий ввод vs.скорость
Сигнал управления скоростью двигателя может уменьшить или увеличить поток; однако это не прямая линейная зависимость. Например, при фиксированном 50% ШИМ-сигнале скорость насоса будет снижена, но не ровно на 50%.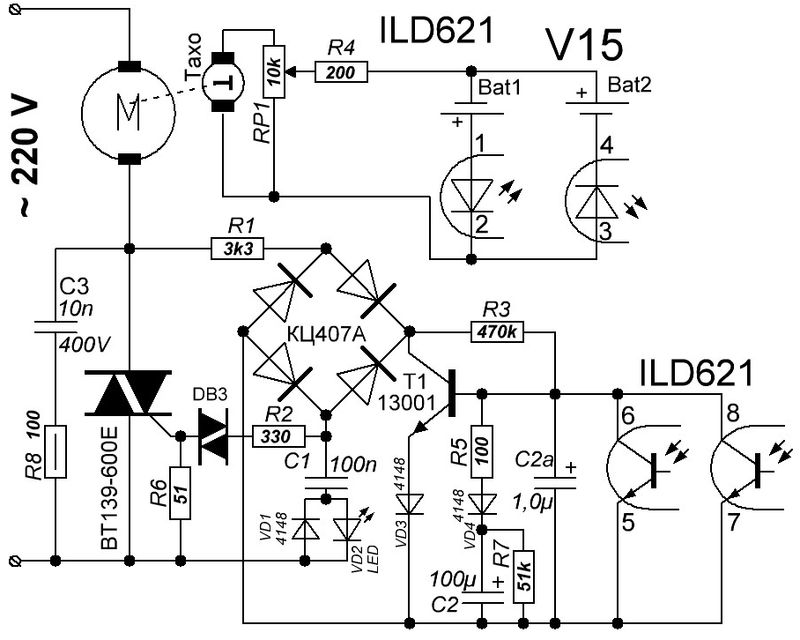 Кроме того, при изменении нагрузки на насос скорость насоса также изменится, даже если сигнал ШИМ является фиксированным.
Кроме того, при изменении нагрузки на насос скорость насоса также изменится, даже если сигнал ШИМ является фиксированным.
Максимальная скорость двигателя может быть уменьшена конфигурацией насоса или давлением / вакуумной нагрузкой на насос в приложении. Крутящий момент и скорость имеют линейную зависимость; когда для вращения насоса требуется больший крутящий момент, двигатель замедляется.
Остановка двигателя
Двигатели насоса могут быть повреждены, если насос остановится. Когда ротор двигателя заблокирован в этом положении и на двигатель подается питание, нагрев будет увеличиваться и может повредить внутренний контроллер. При использовании управления скоростью для снижения скорости остановка двигателя более вероятна, и за ней следует внимательно следить.
Разработчикам системы рекомендуется установить предохранительный предел тока или предохранитель для питания насоса. Это может помочь предотвратить повреждение двигателя насоса и системы в случае остановки.
Перезапуск с пониженной скоростью
Использование любого метода управления скоростью снижает полезную мощность двигателя. Если во время перезапуска скорость снижается, пусковой крутящий момент будет уменьшен. Разработчики должны обеспечить возможность повторного запуска насоса при любых условиях (например, при нагрузке под давлением и температуре окружающей среды) при снижении скорости.
Рекомендуемая частота
При использовании метода управления скоростью ШИМ рекомендуемая частота составляет 20 кГц. Частоты ниже 20 кГц могут создавать слышимый жужжащий звук, так как диапазон слышимых частот для людей составляет от 20 Гц до 20 кГц.Использование более высоких частот может ограничить диапазон регулирования из-за времени нарастания и спада транзистора; возможно переключение так быстро, что сигнал низкого или высокого рабочего цикла отображается как 0% или 100%, потому что транзистор не может переключаться достаточно быстро. Кроме того, для некоторых двигателей и схем управления частота ШИМ выше 20 кГц может снизить эффективность.
Сводка
В эпоху, когда штат инженеров сокращается так же быстро, как и инструменты, которые они проектируют, это помогает работать с разносторонними и опытными поставщиками компонентов.Например, Parker – поставщик насосов, который производит большую часть собственных бесщеточных двигателей. Этот опыт в проектировании двигателей и насосов ускоряет настройку и производство прототипов, что помогает сократить сроки и затраты на проектирование.
Статья предоставлена Джейми Кэмпбеллом, инженером по прикладным программам подразделения Precision Fluidics, Parker Hannifin Co., и первоначально была опубликована в DesignNews в феврале 2016 года.
Прочие должности, связанные с медицинским оборудованием:
Мини-компоненты для медицинских устройств имеют большое значение в конструкции
Как дозировать жидкости небольшого объема с помощью Precision
Учебное пособие по электродвигателям постоянного тока– Расчеты электродвигателей постоянного тока без сердечника с щетками
Расчет двигателей для двигателей постоянного тока без сердечника с щеткой
При выборе бесщеточного двигателя постоянного тока без сердечника для приложения или при разработке прототипа с приводом необходимо учитывать несколько основных принципов физики двигателя, которые необходимо учитывать для создания безопасной, хорошо функционирующей и достаточно мощной прецизионной приводной системы.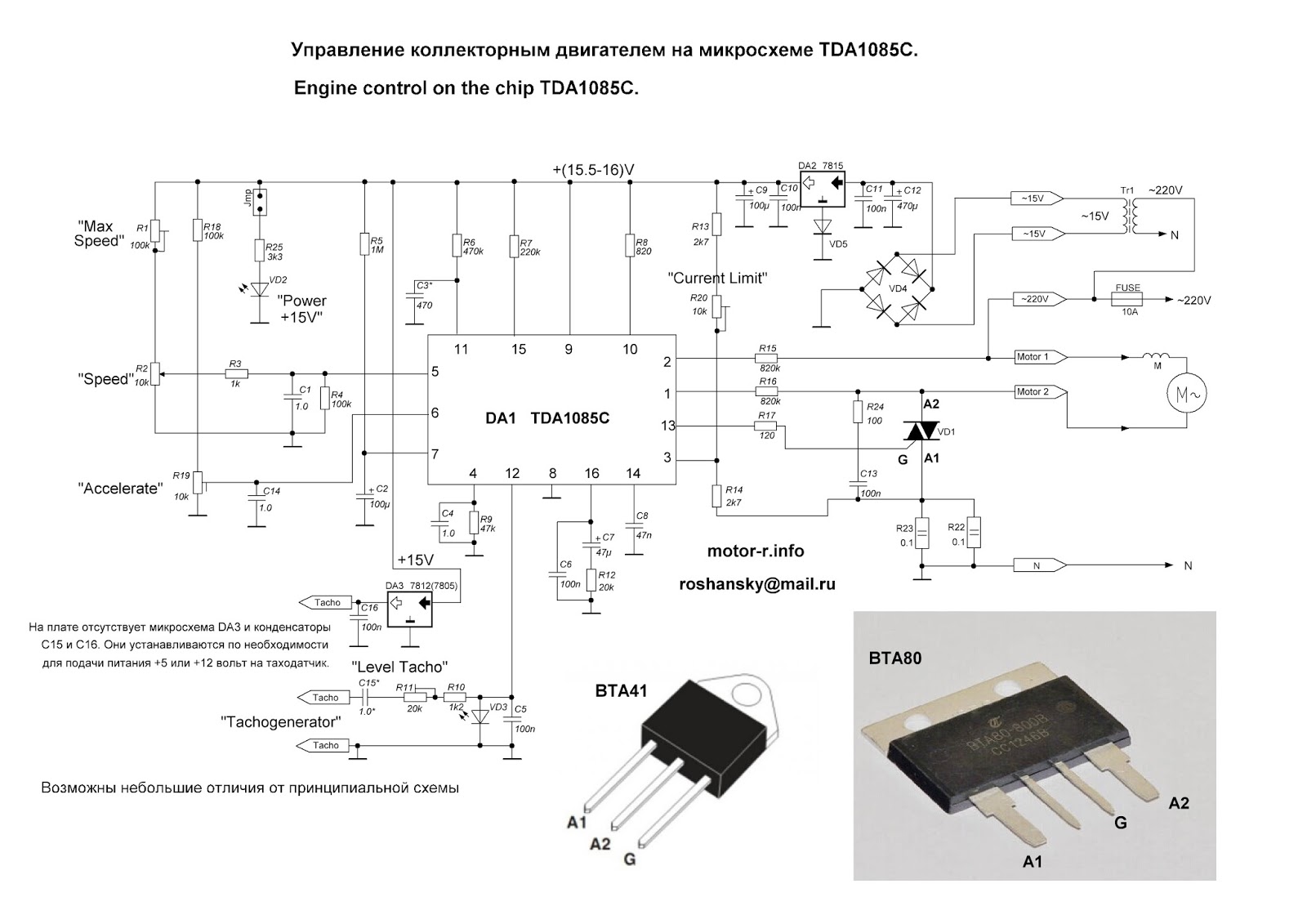 В этом документе мы предоставили некоторые важные методы, формулы и детали расчетов для определения выходной мощности двигателя без сердечника, кривую скорость-крутящий момент двигателя, графики тока и эффективности, а также теоретические расчеты в холодном состоянии, которые оценивают характеристики двигателя.
В этом документе мы предоставили некоторые важные методы, формулы и детали расчетов для определения выходной мощности двигателя без сердечника, кривую скорость-крутящий момент двигателя, графики тока и эффективности, а также теоретические расчеты в холодном состоянии, которые оценивают характеристики двигателя.
являются преобразователями, поскольку они преобразуют электрическую энергию ( P, , в ) в механическую энергию ( P, , из ). Частное обоих членов соответствует КПД двигателя.Потери на трение и потери в меди приводят к общей потере мощности ( P потери ) в Джоулях / сек (потери в железе в двигателях постоянного тока без сердечника пренебрежимо малы). Существуют дополнительные потери из-за нагрева, но мы обсудим их ниже:
В физике мощность определяется как скорость выполнения работы. Стандартная метрическая единица измерения мощности – «ватт» Вт. Как рассчитывается мощность? Для линейного движения мощность – это произведение силы и расстояния в единицу времени P = F · (d / t) .Поскольку скорость – это расстояние во времени, уравнение принимает вид P = F · s . В случае вращательного движения аналогичный расчет мощности представляет собой произведение крутящего момента и углового расстояния в единицу времени или просто произведение крутящего момента и угловой скорости.
Как рассчитывается мощность? Для линейного движения мощность – это произведение силы и расстояния в единицу времени P = F · (d / t) .Поскольку скорость – это расстояние во времени, уравнение принимает вид P = F · s . В случае вращательного движения аналогичный расчет мощности представляет собой произведение крутящего момента и углового расстояния в единицу времени или просто произведение крутящего момента и угловой скорости.
Где:
P = Мощность, Вт
M = Крутящий момент в Нм
F = Сила, Н
d = Расстояние в м
t = Время в с
ω рад = Угловая скорость в рад / с
Символ, используемый для крутящего момента, обычно представляет собой строчную греческую букву «τ» (тау) или иногда просто букву «T» .Однако, когда он называется «Момент силы», его обычно обозначают буквой «М» .
часто используется строчная буква « n » для обозначения скорости вокруг оси. Обычно « n » выражается в единицах оборотов в минуту или об / мин.
При расчете механической мощности важно учитывать единицы измерения. При вычислении мощности, если « n » (скорость) находится в мин -1 , тогда вы должны преобразовать это в угловую скорость в единицах рад / с .Это достигается путем умножения скорости на коэффициент преобразования единиц 2π / 60 . Кроме того, если « M » (крутящий момент) находится в мНм , то мы должны умножить его на 10 -3 (разделить на 1 000), чтобы преобразовать единицы в Нм для целей расчета.
Где:
n = Скорость в мин. -1
M = Крутящий момент в мНм
Предположим, что необходимо определить мощность, которую конкретный двигатель 2668W024CR должен выдавать при холодной работе с крутящим моментом 68 мНм при скорости 7 370 мин.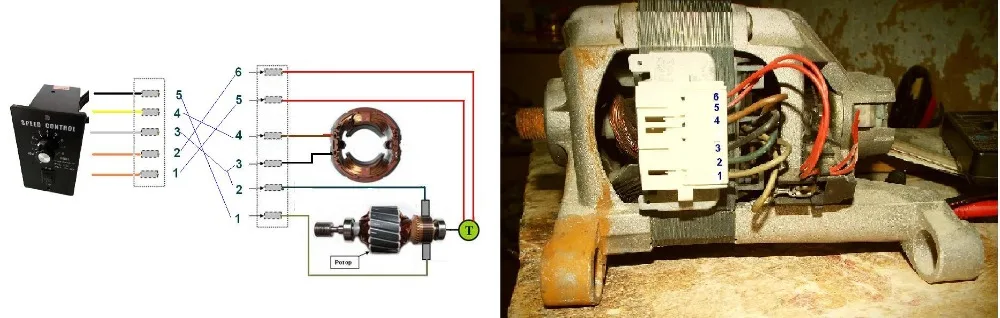 -1 .Произведение крутящего момента, скорости и соответствующего коэффициента преобразования показано ниже.
-1 .Произведение крутящего момента, скорости и соответствующего коэффициента преобразования показано ниже.
Расчет начальной требуемой мощности часто используется в качестве предварительного шага при выборе двигателя или мотор-редуктора. Если механическая выходная мощность, необходимая для данного приложения, известна, то можно проверить максимальную или продолжительную номинальную мощность для различных двигателей, чтобы определить, какие двигатели являются возможными кандидатами для использования в данном приложении.
Ниже приведен метод определения параметров двигателя на примере двигателя постоянного тока без сердечника 2668W024CR.Сначала мы объясним более эмпирический подход, а затем проведем теоретический расчет.
Одним из широко используемых методов графического построения характеристик двигателя является использование кривых крутящий момент-скорость. Хотя использование кривых крутящий момент-скорость гораздо чаще встречается в технической литературе для более крупных машин постоянного тока, чем для небольших устройств без сердечника, этот метод применим в любом случае.
Обычно кривые крутящий момент-скорость генерируются путем построения графика скорости двигателя, тока двигателя, механической выходной мощности и эффективности в зависимости от крутящего момента двигателя.Следующее обсуждение будет описывать построение набора кривых крутящего момента-скорости для типичного двигателя постоянного тока на основе серии измерений необработанных данных.
2668W024CR имеет номинальное напряжение 24 В. Если у вас есть несколько основных частей лабораторного оборудования, вы можете измерить кривые крутящий момент-скорость для бессердечного двигателя постоянного тока серии 2668 CR в заданной рабочей точке.
Шаг 1. Измерьте основные параметры
Многие параметры можно получить напрямую с помощью контроллера движения, такого как один из контроллеров движения FAULHABER MC3.Большинство производителей контроллеров предлагают программное обеспечение, такое как FAULHABER Motion Manager, которое включает функцию записи трассировки, которая отображает напряжение, ток, положение, скорость и т. Д. Они также могут предоставить точный снимок работы двигателя с мельчайшими подробностями. Например, семейство контроллеров движения MC3 (MC 5004, MC 5005 и MC 5010) может измерять множество параметров движения. Это, вероятно, самый быстрый метод получения данных для построения кривой крутящего момента-скорости, но это не единственный метод.
Д. Они также могут предоставить точный снимок работы двигателя с мельчайшими подробностями. Например, семейство контроллеров движения MC3 (MC 5004, MC 5005 и MC 5010) может измерять множество параметров движения. Это, вероятно, самый быстрый метод получения данных для построения кривой крутящего момента-скорости, но это не единственный метод.
Если контроллер с функцией записи трассировки недоступен, мы также можем использовать некоторое базовое лабораторное оборудование для определения характеристик двигателя в условиях остановки, номинальной нагрузки и холостого хода. Используя источник питания, установленный на 24 В, запустите 2668W024CR без нагрузки и измерьте скорость вращения с помощью бесконтактного тахометра (например, стробоскопа). Кроме того, измерьте ток двигателя в этом состоянии без нагрузки. Токовый пробник идеально подходит для этого измерения, поскольку он не добавляет сопротивления последовательно с работающим двигателем.Используя регулируемую крутящую нагрузку, такую как тормоз для мелких частиц или регулируемый гистерезисный динамометр, нагрузка может быть связана с валом двигателя.
Теперь увеличьте крутящий момент на двигателе точно до точки. где происходит срыв. При остановке измерьте крутящий момент от тормоз и ток двигателя. Ради этого обсуждение, предположим, что муфта не добавляет нагрузки на двигатель и что нагрузка от тормоза не включать неизвестные фрикционные компоненты. Это также полезно на этом этапе для измерения оконечного сопротивления мотор.Измерьте сопротивление, соприкоснувшись с двигателем. клеммы с омметром. Затем раскрутите вал двигателя и сделайте еще одно измерение. Измерения должны быть очень близки по стоимости. Продолжайте вращать вал и сделайте не менее трех измерений. Это обеспечит что измерения не проводились в точке минимальный контакт на коммутаторе.
Теперь мы измерили:
n 0 = Скорость холостого хода
I 0 = Ток холостого хода
M H = Момент остановки
R = Терминальное сопротивление
Шаг 2: Постройте график зависимости тока отКрутящий момент и скорость в зависимости от крутящего момента
Вы можете подготовить график с крутящим моментом двигателя по абсциссе (горизонтальная ось), скоростью по левой ординате (вертикальная ось) и током по правой ординате. Масштабируйте оси на основе измерений, которые вы сделали на первом шаге. Проведите прямую линию от левого начала графика (нулевой крутящий момент и нулевой ток) до тока останова на правой ординате (крутящий момент при останове и ток останова). Эта линия представляет собой график зависимости тока двигателя от крутящего момента двигателя.Наклон этой линии представляет собой постоянную тока k I , которая является константой пропорциональности для отношения между током двигателя и крутящим моментом двигателя (в единицах тока на единицу крутящего момента или А / мНм). Обратной величине этого наклона является постоянная крутящего момента k M (в единицах крутящего момента на единицу тока или мНм / А).
Масштабируйте оси на основе измерений, которые вы сделали на первом шаге. Проведите прямую линию от левого начала графика (нулевой крутящий момент и нулевой ток) до тока останова на правой ординате (крутящий момент при останове и ток останова). Эта линия представляет собой график зависимости тока двигателя от крутящего момента двигателя.Наклон этой линии представляет собой постоянную тока k I , которая является константой пропорциональности для отношения между током двигателя и крутящим моментом двигателя (в единицах тока на единицу крутящего момента или А / мНм). Обратной величине этого наклона является постоянная крутящего момента k M (в единицах крутящего момента на единицу тока или мНм / А).
Где:
k I = постоянная тока
k M = постоянная момента
В целях данного обсуждения предполагается, что двигатель не имеет внутреннего трения.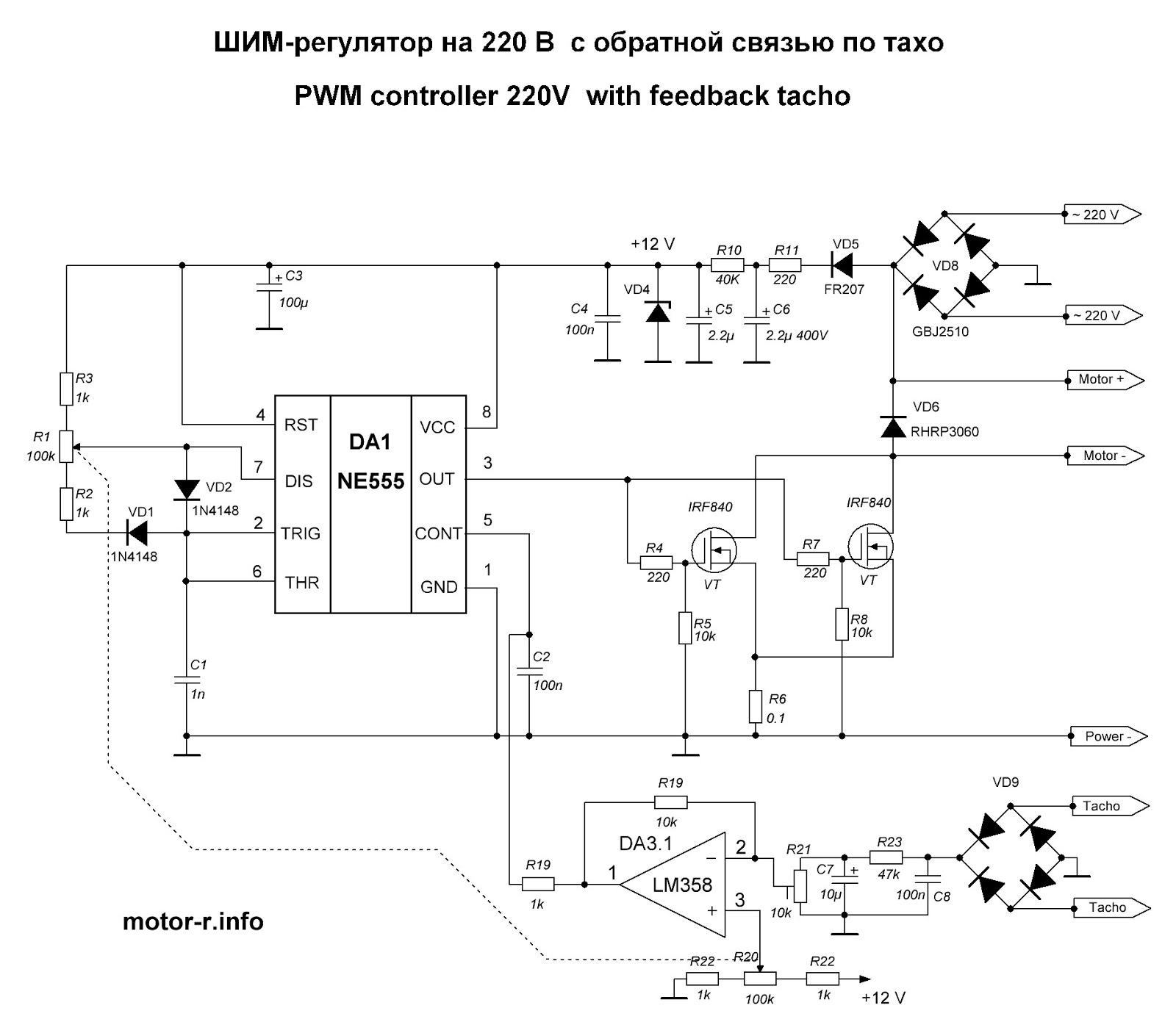 На практике момент трения двигателя M R определяется умножением постоянной крутящего момента k M двигателя на измеренный ток холостого хода I 0 . Линия зависимости крутящего момента от скорости и линия зависимости крутящего момента от тока затем начинаются не с левой вертикальной оси, а со смещением по горизонтальной оси, равным расчетному моменту трения.
На практике момент трения двигателя M R определяется умножением постоянной крутящего момента k M двигателя на измеренный ток холостого хода I 0 . Линия зависимости крутящего момента от скорости и линия зависимости крутящего момента от тока затем начинаются не с левой вертикальной оси, а со смещением по горизонтальной оси, равным расчетному моменту трения.
Где:
M R = Момент трения
Шаг 3: Постройте график Power vs.Крутящий момент и эффективность в зависимости от крутящего момента
В большинстве случаев можно добавить две дополнительные вертикальные оси для построения графика зависимости мощности и эффективности от крутящего момента. Вторая вертикальная ось обычно используется для оценки эффективности, а третья вертикальная ось может использоваться для мощности. Для упрощения этого обсуждения эффективность в зависимости от крутящего момента и мощность в зависимости от крутящего момента будут построены на том же графике, что и графики зависимости скорости от крутящего момента и тока от крутящего момента (пример показан ниже).
Составьте таблицу механической мощности двигателя в различных точках от момента холостого хода до момента остановки.Поскольку выходная механическая мощность – это просто произведение крутящего момента и скорости с поправочным коэффициентом для единиц (см. Раздел о вычислении начальной требуемой мощности), мощность может быть рассчитана с использованием ранее построенной линии для зависимости скорости от крутящего момента.
Примерная таблица расчетов для двигателя 2668W024CR приведена в таблице 1. Затем на график наносится каждая расчетная точка мощности. Результирующая функция представляет собой параболическую кривую, показанную ниже на Графике 1. Максимальная механическая мощность достигается примерно при половине крутящего момента сваливания.Скорость в этот момент составляет примерно половину скорости холостого хода.
Создайте таблицу в электронной таблице КПД двигателя в различных точках от скорости холостого хода до крутящего момента при остановке. Приведено напряжение, приложенное к двигателю, и нанесен график силы тока при различных уровнях крутящего момента. Произведение тока двигателя и приложенного напряжения является мощностью, потребляемой двигателем. В каждой точке, выбранной для расчета, КПД двигателя η представляет собой выходную механическую мощность, деленную на потребляемую электрическую мощность.И снова примерная таблица для двигателя 2668W024CR показана в Таблице 1, а примерная кривая – на Графике 1. Максимальный КПД достигается примерно при 10% крутящего момента двигателя при остановке.
Определения сюжета
- Синий = скорость в зависимости от крутящего момента ( n против M )
- Красный = ток в зависимости от крутящего момента ( I против M )
- Зеленый = эффективность в зависимости от крутящего момента ( η или M )
- Коричневый = мощность в зависимости от крутящего момента ( P, vs.
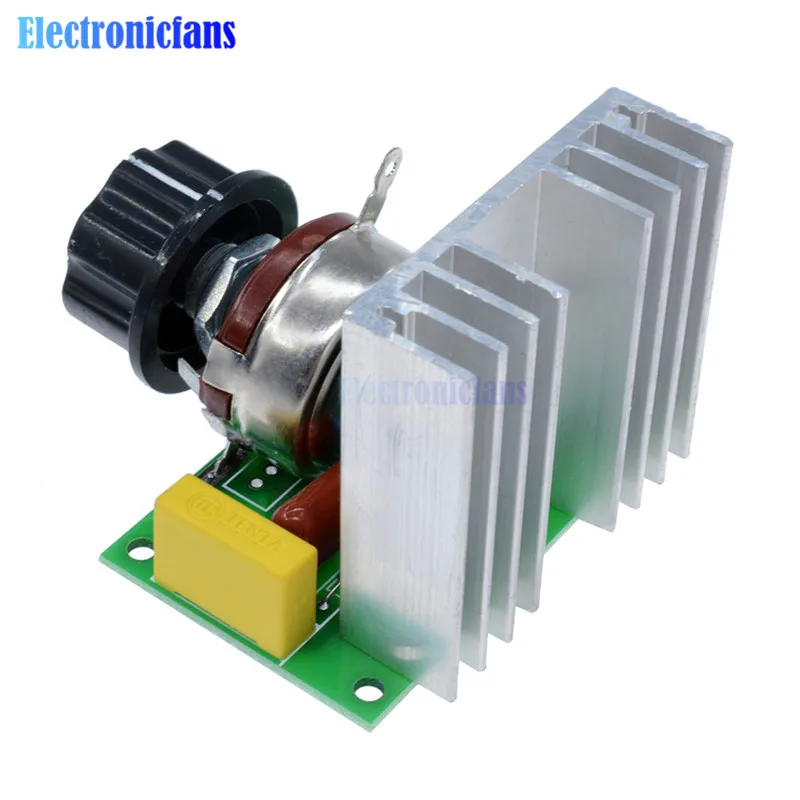 М )
М )
Характеристики двигателя
Примечание. Пунктирные линии представляют значения, которые могут быть получены для холодного двигателя (без повышения температуры), однако сплошные линии учитывают влияние магнита и змеевик подогрева на теплом моторе (об этом позже). Обратите внимание, как все четыре сплошных графика изменяются в результате увеличения сопротивления в медных обмотках и ослабления. выходной крутящий момент из-за нагрева. Таким образом, ваши результаты могут немного отличаться в зависимости от того, холодный или теплый ваш двигатель, когда вы строите графики.Теоретический расчет параметров двигателя
Еще одним полезным параметром при выборе двигателя является постоянная двигателя. Правильное использование этой добротности существенно сократит итерационный процесс выбора двигателя постоянного тока. Он просто измеряет внутреннюю способность преобразователя преобразовывать электрическую энергию в механическую.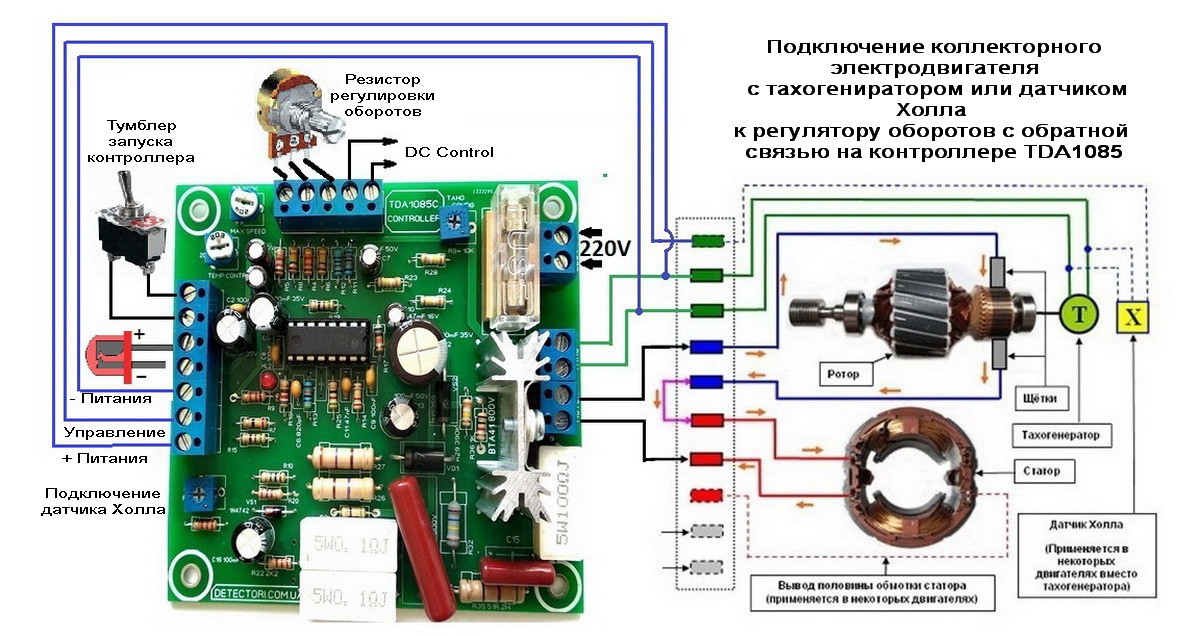
Максимальный КПД достигается примерно при 10% крутящего момента двигателя. Знаменатель называется потерей резистивной мощности. С помощью некоторых алгебраических манипуляций уравнение можно упростить до:
Имейте в виду, что k m (постоянная двигателя) не следует путать с k M (постоянная крутящего момента).Обратите внимание, что индекс константы двигателя – это строчная буква « m », в то время как индекс постоянной крутящего момента использует заглавную букву « M ».
Для щеточного или бесщеточного двигателя постоянного тока относительно небольшого размера отношения, которые определяют поведение двигателя в различных обстоятельствах, могут быть выведены из законов физики и характеристик самих двигателей. Правило Кирхгофа по напряжению гласит: «Сумма возрастаний потенциала в контуре цепи должна равняться сумме уменьшений потенциала.При применении к двигателю постоянного тока, последовательно соединенному с источником питания постоянного тока, правило Кирхгофа может быть выражено следующим образом: «Номинальное напряжение питания от источника питания должно быть равно по величине сумме падений напряжения на сопротивлении обмоток. и обратная ЭДС, генерируемая двигателем ».
и обратная ЭДС, генерируемая двигателем ».
Где:
U = Электропитание в В
I = Ток в А
R = Терминальное сопротивление в Ом
U E = Противо-ЭДС в В
Обратная ЭДС, создаваемая двигателем, прямо пропорциональна угловой скорости двигателя.Константа пропорциональности – это постоянная обратной ЭДС двигателя.
Где:
ω = Угловая скорость двигателя
k E = Постоянная обратной ЭДС двигателя
Следовательно, путем подстановки:
Константа обратной ЭДС двигателя обычно указывается производителем двигателя в В / об / мин или мВ / об / мин. Чтобы получить значимое значение для обратной ЭДС, необходимо указать скорость двигателя в единицах, совместимых с указанной постоянной обратной ЭДС.
«Сумма возрастаний потенциала в контуре цепи должна равняться сумме уменьшений потенциала».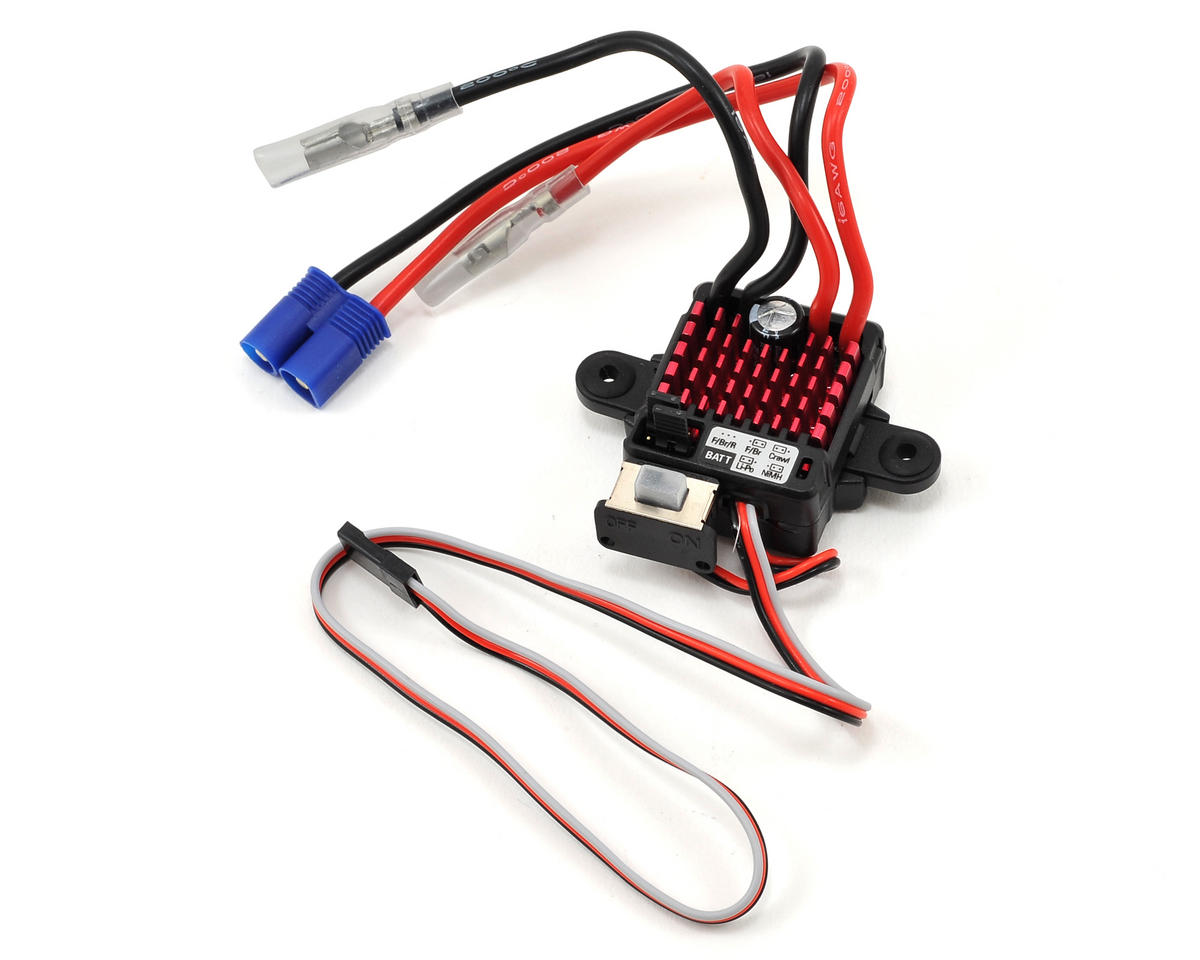
(Правило напряжения Кирхгофа)
Постоянная двигателя зависит от конструкции катушки, силы и направления магнитных линий в воздушном зазоре. Хотя можно показать, что три обычно заданные постоянные двигателя (постоянная противо-ЭДС, постоянная крутящего момента и постоянная скорости) равны, если используются надлежащие единицы, расчет облегчается указанием трех констант в общепринятых единицах.
Крутящий момент, создаваемый ротором, прямо пропорционален току в обмотках якоря. Константа пропорциональности – это постоянная крутящего момента двигателя.
Где:
M м = крутящий момент, развиваемый на двигателе
k M = постоянная крутящего момента двигателя
Подставляя это соотношение для получения текущего ресурса:
Крутящий момент, развиваемый в роторе, равен моменту трения двигателя плюс момент нагрузки (из-за внешней механической нагрузки):
Где:
M R = Момент трения двигателя
M L = Момент нагрузки
Предполагая, что на клеммы двигателя подается постоянное напряжение, скорость двигателя будет прямо пропорциональна сумме момента трения и момента нагрузки. Константа пропорциональности – это наклон кривой крутящий момент-скорость. Моторные характеристики лучше, когда это значение меньше. Чем круче спад наклона, тем хуже производительность, которую можно ожидать от данного двигателя без сердечника. Это соотношение можно рассчитать по:
Константа пропорциональности – это наклон кривой крутящий момент-скорость. Моторные характеристики лучше, когда это значение меньше. Чем круче спад наклона, тем хуже производительность, которую можно ожидать от данного двигателя без сердечника. Это соотношение можно рассчитать по:
Где:
Δn = Изменение скорости
ΔM = Изменение крутящего момента
M H = Крутящий момент
n 0 = Скорость холостого хода
Альтернативный подход к получению этого значение – найти скорость, n :
Используя исчисление, мы дифференцируем обе стороны относительно M , что дает:
Хотя здесь мы не показываем отрицательный знак,
это подразумевается
что результат приведет к уменьшению (отрицательному)
склон.
Пример теоретического расчета двигателя
Давайте немного углубимся в теоретические расчеты. Двигатель постоянного тока без сердечника 2668W024CR должен работать при напряжении 24 В на клеммах двигателя и крутящем моменте 68 мНм. Найдите результирующую константу двигателя, скорость двигателя, ток двигателя, КПД двигателя и выходную мощность. Из таблицы данных двигателя видно, что скорость холостого хода двигателя при 24 В составляет 7 800 мин -1 .Если крутящий момент не связан с валом двигателя, двигатель будет работать с этой скоростью.
Во-первых, давайте получим общее представление о характеристиках двигателя, вычислив постоянную двигателя k m . В этом случае мы получаем константу 28,48 мНм / кв.рт. (Вт).
Скорость двигателя под нагрузкой – это просто скорость без нагрузки за вычетом снижения скорости из-за нагрузки. Константа пропорциональности для отношения между скоростью двигателя и крутящим моментом двигателя представляет собой крутизну зависимости крутящего момента отКривая скорости, заданная делением скорости холостого хода двигателя на крутящий момент при останове. В этом примере мы рассчитаем снижение скорости (без учета температурных эффектов), вызванное нагрузкой крутящего момента 68 мНм, исключив единицы мНм:
В этом примере мы рассчитаем снижение скорости (без учета температурных эффектов), вызванное нагрузкой крутящего момента 68 мНм, исключив единицы мНм:
Теперь через замену:
Тогда скорость двигателя под нагрузкой должна быть приблизительно:
Ток двигателя под нагрузкой – это сумма тока холостого хода и тока, возникающего в результате нагрузки.
Константа пропорциональности тока и крутящего момента нагрузки – это постоянная крутящего момента ( k M ) . Это значение составляет 28,9 мНм / А. Взяв обратную величину, мы получаем постоянную тока k I , которая может помочь нам рассчитать ток при нагрузке. В этом случае нагрузка составляет 68 мНм, а ток, возникающий от этой нагрузки (без учета нагрева), приблизительно равен:
Это значение составляет 28,9 мНм / А. Взяв обратную величину, мы получаем постоянную тока k I , которая может помочь нам рассчитать ток при нагрузке. В этом случае нагрузка составляет 68 мНм, а ток, возникающий от этой нагрузки (без учета нагрева), приблизительно равен:
Полный ток двигателя можно приблизительно определить, суммируя это значение с током холостого хода двигателя.В таблице данных указан ток холостого хода двигателя как 78 мА. После округления общий ток примерно:
Выходная механическая мощность двигателя – это просто произведение скорости двигателя и крутящего момента с поправочным коэффициентом для единиц (если требуется). Следовательно, выходная мощность двигателя будет примерно:
.Подводимая к двигателю механическая мощность является произведением приложенного напряжения и общего тока двигателя в амперах. В этом приложении:
Так как КПД η – это просто выходная мощность, деленная на входную мощность, давайте вычислим ее в нашей рабочей точке:
Оценка температуры обмотки двигателя во время работы:
Ток I , протекающий через сопротивление R , приводит к потерям мощности в виде тепла I 2 · R . В случае двигателя постоянного тока произведение квадрата полного тока двигателя и сопротивления якоря является потерей мощности в виде тепла в обмотках якоря. Например, если общий ток двигателя составлял 0,203 А, а сопротивление якоря 14,5 Ом, потери мощности в виде тепла в обмотках составят:
В случае двигателя постоянного тока произведение квадрата полного тока двигателя и сопротивления якоря является потерей мощности в виде тепла в обмотках якоря. Например, если общий ток двигателя составлял 0,203 А, а сопротивление якоря 14,5 Ом, потери мощности в виде тепла в обмотках составят:
Тепло, возникающее в результате потерь в катушке I 2 · R , рассеивается за счет теплопроводности через компоненты двигателя и воздушного потока в воздушном зазоре. Легкость, с которой это тепло может рассеиваться в двигателе (или любой системе), определяется тепловым сопротивлением.
Термическое сопротивление (которое является обратной величиной теплопроводности) показывает, насколько хорошо материал сопротивляется теплопередаче через определенный путь. Производители двигателей обычно указывают способность двигателя рассеивать тепло, предоставляя значения теплового сопротивления R th . Например, алюминиевая пластина с большим поперечным сечением будет иметь очень низкое тепловое сопротивление, тогда как значения для воздуха или вакуума будут значительно выше.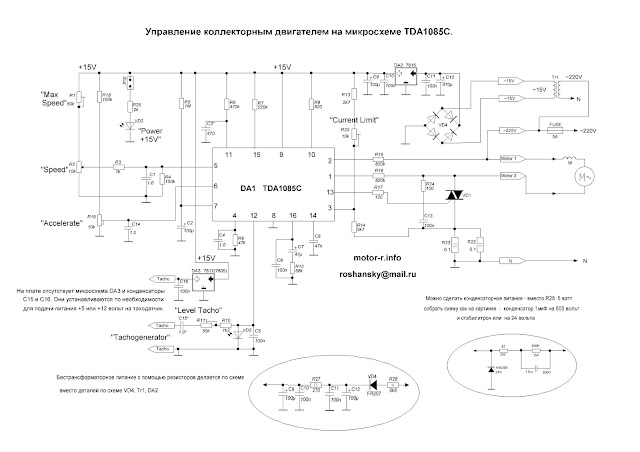 В случае двигателей постоянного тока существует тепловой путь от обмоток двигателя к корпусу двигателя и второй тепловой канал между корпусом двигателя и окружающей средой двигателя (окружающий воздух и т. Д.)). Некоторые производители двигателей указывают тепловое сопротивление для каждого из двух тепловых путей, в то время как другие указывают только их сумму в качестве общего теплового сопротивления двигателя. Значения термического сопротивления указаны в увеличении температуры на единицу потери мощности. Суммарные потери I 2 · R в катушке (источнике тепла) умножаются на тепловое сопротивление для определения установившейся температуры якоря. Повышение температуры в установившемся режиме двигателя ( T ) определяется по формуле:
В случае двигателей постоянного тока существует тепловой путь от обмоток двигателя к корпусу двигателя и второй тепловой канал между корпусом двигателя и окружающей средой двигателя (окружающий воздух и т. Д.)). Некоторые производители двигателей указывают тепловое сопротивление для каждого из двух тепловых путей, в то время как другие указывают только их сумму в качестве общего теплового сопротивления двигателя. Значения термического сопротивления указаны в увеличении температуры на единицу потери мощности. Суммарные потери I 2 · R в катушке (источнике тепла) умножаются на тепловое сопротивление для определения установившейся температуры якоря. Повышение температуры в установившемся режиме двигателя ( T ) определяется по формуле:
Где:
ΔT = Изменение температуры в К
I = Ток через обмотки двигателя в А
R = Сопротивление обмоток двигателя в Ом
R th2 = Тепловое сопротивление от обмоток к корпусу в к / Вт
R th3 = Тепловое сопротивление корпуса к окружающей среде в к / Вт
Давайте продолжим наш пример, используя двигатель 2668W024CR, работающий с током 2458 А в обмотках двигателя, с сопротивлением якоря 1, 03 Ом, тепловое сопротивление между обмоткой и корпусом составляет 3 к / Вт, а тепловое сопротивление между корпусом и окружающей средой – 8 к / Вт. Повышение температуры обмоток рассчитывается по формуле ниже; мы можем заменить Ploss на I 2 · R :
Повышение температуры обмоток рассчитывается по формуле ниже; мы можем заменить Ploss на I 2 · R :
Поскольку шкала Кельвина использует то же приращение единиц, что и шкала Цельсия, мы можем просто подставить значение Кельвина, как если бы оно было значением Цельсия. Если предположить, что температура окружающего воздуха составляет 22 ° C, то конечная температура обмоток двигателя может быть приблизительно равна:
Где:
T теплый = Температура обмотки
Важно убедиться, что конечная температура обмоток не превышает номинальное значение двигателя, указанное в техническом паспорте.В приведенном выше примере максимально допустимая температура обмотки составляет 125 ° C. Поскольку расчетная температура обмотки составляет всего 90,4 ° C, тепловое повреждение обмоток двигателя не должно быть проблемой в этом приложении.
Можно использовать аналогичные вычисления, чтобы ответить на вопросы другого типа. Например, приложение может потребовать, чтобы двигатель работал с максимальным крутящим моментом, в надежде, что он не будет поврежден из-за перегрева. Предположим, желательно запустить двигатель с максимально возможным крутящим моментом при температуре окружающего воздуха 22 ° C.Дизайнер хочет знать, какой крутящий момент двигатель может безопасно обеспечить без перегрева. Опять же, в техническом описании двигателя постоянного тока без сердечника 2668W024CR указана максимальная температура обмотки 125 ° C. Итак, поскольку температура окружающей среды составляет 22 ° C, максимально допустимое повышение температуры ротора составляет: 125 ° C – 22 ° C = 103 ° C
Например, приложение может потребовать, чтобы двигатель работал с максимальным крутящим моментом, в надежде, что он не будет поврежден из-за перегрева. Предположим, желательно запустить двигатель с максимально возможным крутящим моментом при температуре окружающего воздуха 22 ° C.Дизайнер хочет знать, какой крутящий момент двигатель может безопасно обеспечить без перегрева. Опять же, в техническом описании двигателя постоянного тока без сердечника 2668W024CR указана максимальная температура обмотки 125 ° C. Итак, поскольку температура окружающей среды составляет 22 ° C, максимально допустимое повышение температуры ротора составляет: 125 ° C – 22 ° C = 103 ° C
Теперь мы можем рассчитать увеличение сопротивления катушки из-за рассеивания тепловой мощности:
Где:
α Cu = Температурный коэффициент меди в единицах K -1
(Обратный Кельвин)
Таким образом, из-за нагрева катушки и магнита из-за рассеивания мощности от потерь I 2 · R сопротивление катушки увеличилось с 1,03 Ом до 1,44 Ом. Теперь мы можем пересчитать новую постоянную крутящего момента k M , чтобы увидеть влияние повышения температуры на характеристики двигателя:
Теперь мы можем пересчитать новую постоянную крутящего момента k M , чтобы увидеть влияние повышения температуры на характеристики двигателя:
Где:
α M = Температурный коэффициент магнита в единицах K -1
(Обратный Кельвин)
Теперь мы пересчитываем новую константу обратной ЭДС k E и наблюдаем за результатами. Из формулы, полученной нами выше:
Как мы видим, постоянная крутящего момента ослабевает в результате повышения температуры, как и константа обратной ЭДС! Таким образом, сопротивление обмотки двигателя, постоянная крутящего момента и постоянная обратная ЭДС – все это отрицательно сказывается по той простой причине, что они зависят от температуры.
Мы могли бы продолжить вычисление дополнительных параметров из-за более горячей катушки и магнита, но наилучшие результаты дает выполнение нескольких итераций, что лучше всего выполняется с помощью программного обеспечения для количественного анализа.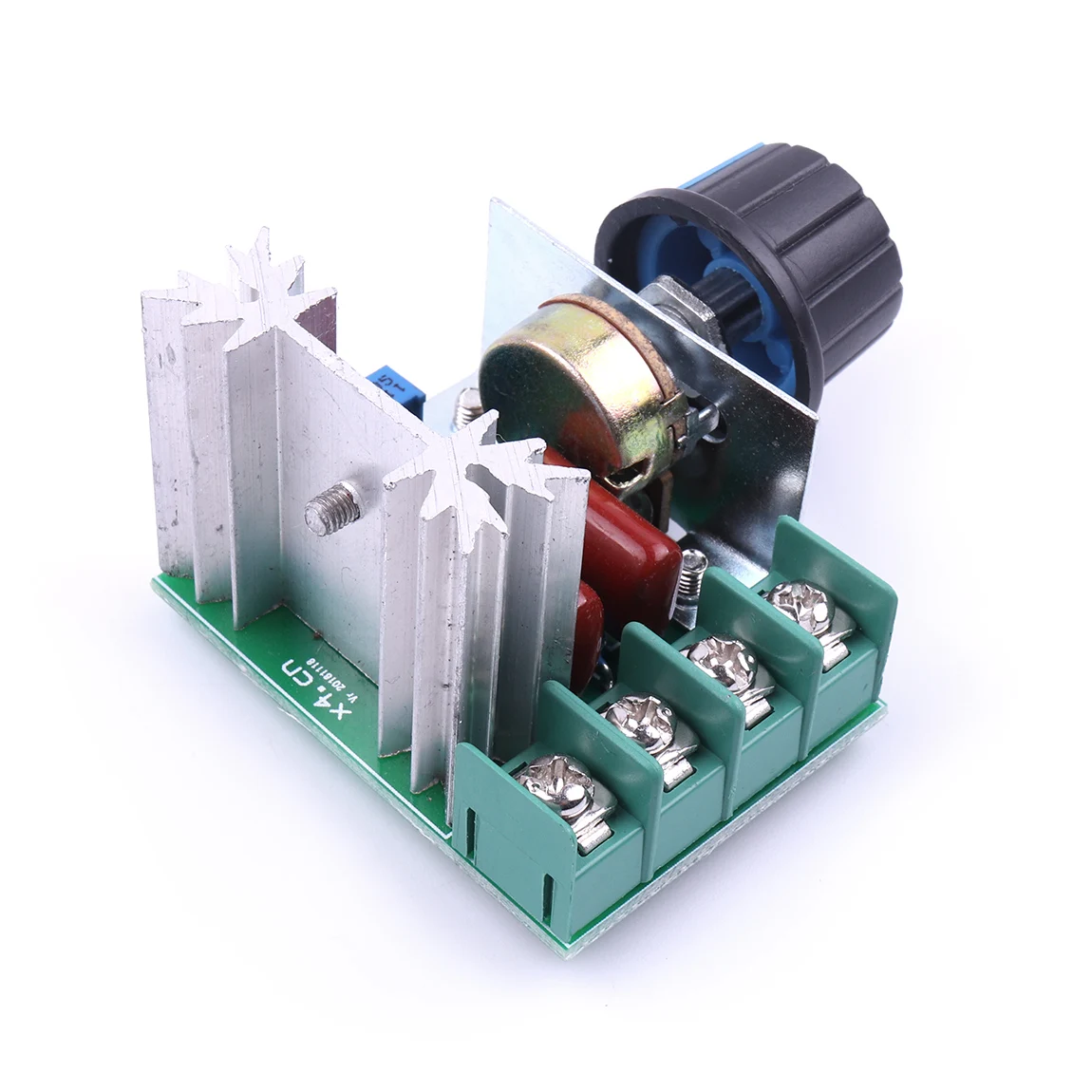 По мере того, как температура двигателя продолжает расти, каждый из трех параметров будет изменяться таким образом, что ухудшает характеристики двигателя и увеличивает потери мощности. При непрерывной работе двигатель может даже достичь точки «теплового разгона», что потенциально может привести к невозможности ремонта двигателя.Это может произойти, даже если первоначальные расчеты показали приемлемое повышение температуры (с использованием значений R и k M при температуре окружающей среды).
По мере того, как температура двигателя продолжает расти, каждый из трех параметров будет изменяться таким образом, что ухудшает характеристики двигателя и увеличивает потери мощности. При непрерывной работе двигатель может даже достичь точки «теплового разгона», что потенциально может привести к невозможности ремонта двигателя.Это может произойти, даже если первоначальные расчеты показали приемлемое повышение температуры (с использованием значений R и k M при температуре окружающей среды).
Обратите внимание, что максимально допустимый ток через обмотки двигателя может быть увеличен за счет уменьшения теплового сопротивления двигателя. Тепловое сопротивление между ротором и корпусом R th2 в первую очередь определяется конструкцией двигателя. Тепловое сопротивление корпуса относительно окружающей среды R th3 можно значительно уменьшить за счет добавления радиаторов.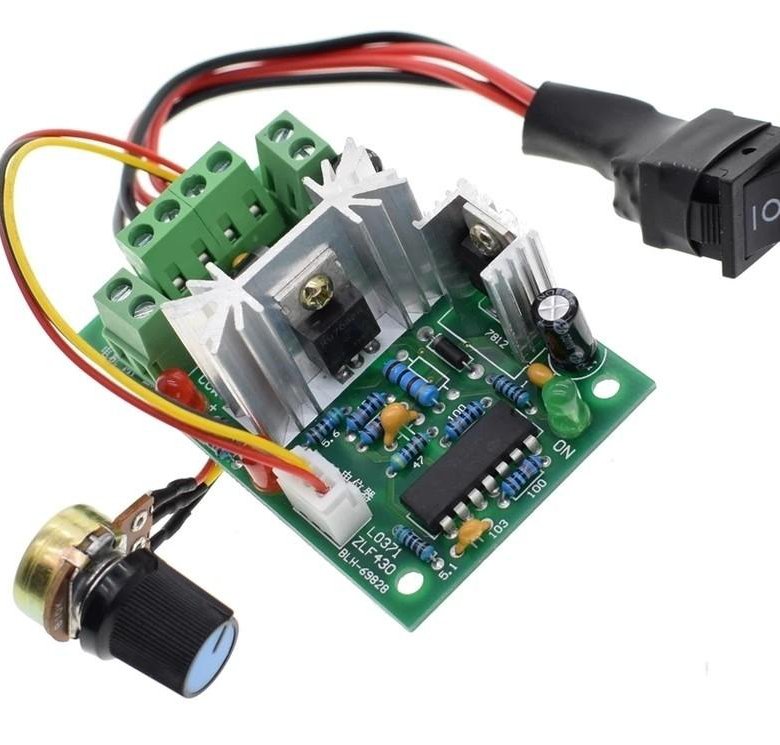 Тепловое сопротивление двигателя для небольших двигателей постоянного тока обычно указывается для двигателя, подвешенного на открытом воздухе. Следовательно, обычно наблюдается некоторый отвод тепла, который возникает в результате простой установки двигателя в теплопроводящий каркас или шасси. Некоторые производители более крупных двигателей постоянного тока указывают тепловое сопротивление, когда двигатель установлен на металлической пластине известных размеров и из материала.
Тепловое сопротивление двигателя для небольших двигателей постоянного тока обычно указывается для двигателя, подвешенного на открытом воздухе. Следовательно, обычно наблюдается некоторый отвод тепла, который возникает в результате простой установки двигателя в теплопроводящий каркас или шасси. Некоторые производители более крупных двигателей постоянного тока указывают тепловое сопротивление, когда двигатель установлен на металлической пластине известных размеров и из материала.
Для получения дополнительной информации о расчетах бесщеточного двигателя постоянного тока и о том, как на производительность электродвигателя может влиять тепловая мощность, обратитесь к квалифицированному инженеру FAULHABER.Мы всегда готовы помочь.
.
