
Как правильно выполняется реверсивное управление двигателями постоянного тока электродвижка ардуино
Схема управления двигателем постоянного тока, реверсирование и реверсивное управление мотором
Реверсирование и замедление двигателей постоянного тока электронный механизм arduino и электронная схема управления.
Основная схема пластического запуска и остановки без содействия переключателей в обе стороны. Главной опорой данной схемы стоит простой резистор, который удерживает вращение прибора в среднем состоянии, а при крайних плавно начинает вращать электродвигатель в обоих направлениях. Такое применение подходит для 12в электромотора, его питания и схемы в целом, также управления при неизменном потоке, которое подробно описано далее.
Включение неизменчивого тока прямым запуском, возможно только с механизмами малой мощности (допустимый пик тока 4-6 кратно номинального). Пуск постоянного течения в носителях с более сильным мотором совершается с использованием пускового реостата, он же и регулирует допустимые значения для поддержки механической прочности, как это было описано в схеме.
Нормальный ток необходим при запуске движок, должен развивать довольно большой разгон. Для этого акселерометр последовательно уменьшает сопротивление при перемене рычага с одного неподвижного контакта на другой. Снижение сопротивления также возможно замыкания ненадолго секций, с помощью контакторов. В противовес пускового, регулировочный реостат рассчитан на долговременное прохождение тока. Но, происходит большая потеря энергии во время работы инструмента, результатом чего кпд в моторе убавляется.
При ручном запуске или автомате, ток меняется от максимально допустимого, 1,8-2,5 – кратному номинальному в начале, и при противодействии аппаратуры до минимального, 1,1 – 1,5 кратному номинальному в конце. Также такие значения будут при переключении на другое положение пускового реостата.
Реверсирование
Реверсирование – смена вращений двигателя, в котором нужно переключиться на обмотку или якорь, но для верпа сила будет течь в другом направлении. Так званые регуляторы, которые используются для моторчиков с неизменным течением.
Основные тактики для возврата механизма:
- Контакторный, используется очень редко.
- Статический способ. В основном это изменение полярности или направления тока.
- Реверсирование с магнитным пускателем.
- Реверс электродвижка с асинхронными прямыми частотными преобразователями. Используется вместе с векторным управлением в замкнутой системе и датчиком обратной связи. Аналогично и регулирование аккумулятора с непрерывным током.
Реверс с постоянными магнитами производится с помощью изменения полярности питания пусковых устройств, тогда ротор начинает вращаться в другую сторону. В этом случае можно регулировать скорость вращения. В основном управление происходит по 2-х проводной линии (тиристорами).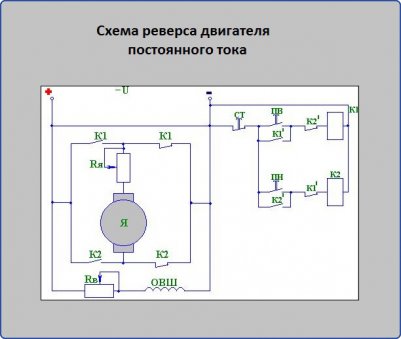 Также изменения реверсивности на большой мощности следует на якоре. Неправильное возбуждение обмотки производит к неисправностям, из-за повышенного напряжения возможна изоляция обмоток и выход аппарата из строя. Поэтому нужно правильно собрать оборудования по технической характеристике.
Также изменения реверсивности на большой мощности следует на якоре. Неправильное возбуждение обмотки производит к неисправностям, из-за повышенного напряжения возможна изоляция обмоток и выход аппарата из строя. Поэтому нужно правильно собрать оборудования по технической характеристике.
Осуществляется реверс моторов последовательного возбуждения возможно с помощью переходов или обвиванием возбуждения якоря, потому что энергические запасы в якорях и обвивках не очень большие и время непрерывного переключения небольшие.
Возвращение с параллельным возбуждением в якоре сначала нужно отключить от питания, поэтому моторчик автоматически тормозится. Когда он заканчивает тормозить, якорь переключается, если он не переключился во время торможения, тогда запуск начинается при вращении в обратную сторону. В той же градации придерживается и реверсирование для последовательного возбуждения:
- Выключение
- Замедление
- Переключение
- Пуск в обратную сторону
Реверс основного инструмента с разнообразным включением нужно перевести на якорек или прямую обмотку разом с параллельной обмоткой.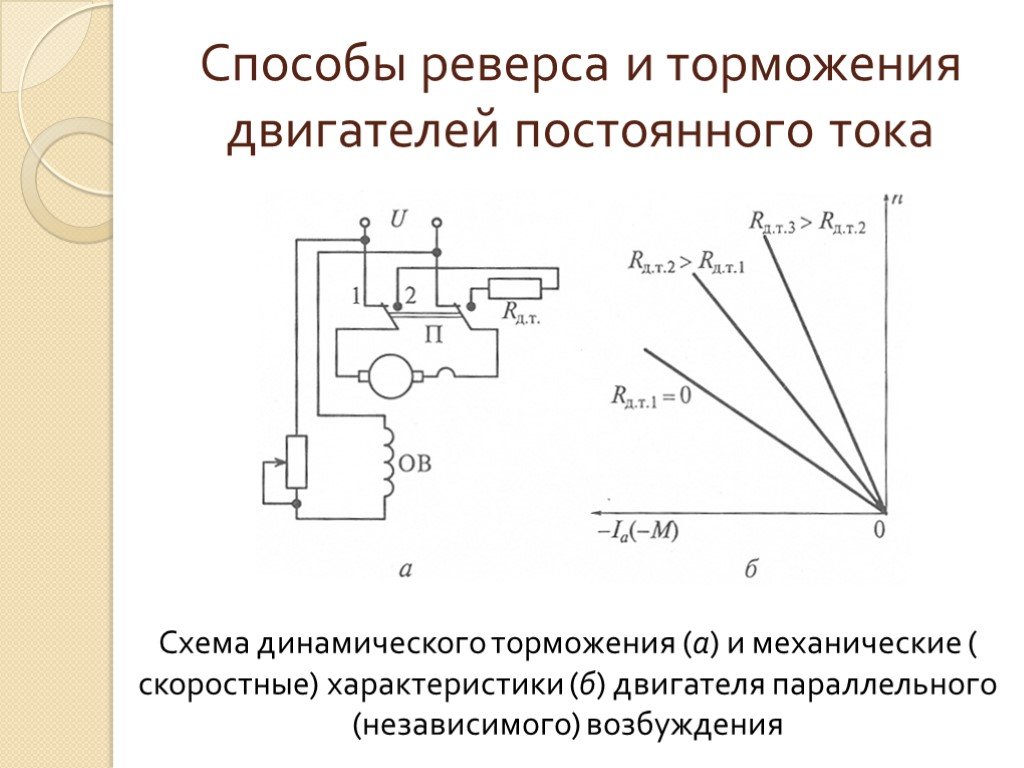
Пуск и торможение
Торможение с постоянным током связано с, конечно же, мощностью. Поскольку прямое подключение возможно на малых мощностях сердца аппарата, во всех следующих обстоятельствах можно использовать только пусковой реостат. Он определяет позволенные значения и определяет допустимый ток.
Реостат представляет собою провод, рассортирован на секции с большим сопротивлением. В переходах зафиксированы медные кнопочки или контакты, к ним можно присоединять провод. При запуске сопротивление оборудования должно уменьшаться по порядку. Чтобы уменьшить время работы мотора, нужно замедление, так как при его отсутствии может быть слишком большое количество. Также замедление нужно для фиксирования приводимых приборов в нужном порядке положения.
Выключение возможно на двух типов: электрическое и механическое
Механистическая остановка в основном делается с помощью накладки колодок на тормозной шкив. Нехватка самопроизвольного тормоза: Момент остановки невозможно предугадать из-за случайностей. Если масло, или жидкость попадет на шкив тормоза данное замедление возможно, когда период времени и тормозного пути не ограничены.
Если масло, или жидкость попадет на шкив тормоза данное замедление возможно, когда период времени и тормозного пути не ограничены.
В аварийных ситуациях после прежнего электрического торможения на небольшом темпе движения можно сделать полную остановку инструмента. Зафиксировать положение прибора в определенном месте.
Электрическая остановка создает точный момент торможения. Так как фиксация невозможна в нужном месте, механическим путем оно дополняется и входит в работу после окончания работы электрического. Такой тормоз возможен, когда ток идет в траектории согласно ЭДС движка.
Доступные три вида торможения:
- Стоп мотора беспрестанного потока с возвращением энергии. Кинетическая энергия должна превратиться в электрическую, часть с которой попадает обратно в сеть. Стоп выполнено, когда напряжение уменьшается при любом загруженности машинного оборудования.
- При противоположном включении. С помощью вращающегося аппарата переключается на противоположное направление вращения.
 В нем напряжение складывается, следовательно, нужно включить резистор для ограничения силы с сопротивлением. Такое замедление берет большую затрату энергии.
В нем напряжение складывается, следовательно, нужно включить резистор для ограничения силы с сопротивлением. Такое замедление берет большую затрату энергии. - Динамическое. Делается при включении на зажимах в сердце резистора мотора. Кинетическая запасная энергия превращается в электрическую энергию и рассеивается. Такое замедление очень распространенный.
Пуск, возврат и замедление двигателей постоянного тока выполняется с соблюдением технологических требований и правилам безопасности.
Arduino возврат электромотора для 12 вольтовых инструментов
При собирании моделей часто используются малые щеточные электромоторы с постоянным током. Для их управления используется микроконтроллер arduino, который запрограммирован к ручному управлению.
Поэтому, если вращения в нем предполагается в одну сторону с небольшой мощностью в двигателе, а также напряжения от 3,3 до 5ти Вт, то схему можно упростить.
В такой модели дистанционного управления нужно использовать возвращение моторов с мощностью более 5 Вт.
Заключение: Реверсирование и выключение приборов постоянного тока является очень гибким приводным приборам, которое используется там, где не нужны большие моменты при старте. Механизм имеет надежные цепи регулировки скорости вращения и простой при запуске в ход орудия.
Реверсирование двигателя.

Изменение направления вращения (реверсирование) двигателя достигается либо изменением направления тока в цепи якоря, либо изменением направления тока в цепи возбуждения.
На рис., а показана принципиальная схема включения обмоток двигателя до реверсирования, а на рис. б и в – схемы включения для измененного направления вращения двигателя.
Схемы реверсирования двигателя постоянного тока.
Двигатели с последовательным возбуждением.
У двигателя постоянного тока, схема которого представлена на рисунке, обмотка возбуждения 0В соединена последовательно с обмоткой якоря. Ток возбуждения равен току якоря:
Схема включения двигателя последовательного возбуждения.
Когда ток нагрузки невелик и магнитная система машины не насыщена (Ф – Iя), вращающий момент М пропорционален квадрату тока:
где 1 — коэффициент пропорциональности.
При больших нагрузках и значительном насыщении магнитной системы (Фconst) вращающий момент становится пропорциональным току Iя:
где
2 —коэффициент пропорциональности.
Из формул, данных в этой теме нетрудно установить, что механическая характеристика двигателя последовательного возбуждения на участке, соответствующем небольшим нагрузкам, имеет вид гиперболы, а при значительных нагрузках она становится прямолинейной (кривая 1 на рис.
Работа
двигателя последовательного возбуждения
вхолостую или при малых нагрузках
(М<0,15—0,2 Мн) недопустима, так как в этом случае
скорость двигателя возрастает до
величины, опасной для механической
целости якоря («разнос» двигателя). При
введении добавочного сопротивления
(реостата) r
Если
параллельно обмотке возбуждения
двигателя включить сопротивление,
то ток Iя разветвится и через обмотку возбуждения
потечет лишь часть тока Iя.
В результате этого магнитный поток
уменьшится, а скорость вращения возрастет.
Рисунок (Механические характеристики двигателя последовательного возбуждения.
Рисунок (Универсальные характеристики двигателя последовательного возбуждения ).
Для построения механических характеристик двигателя нельзя получить необходимые уравнения, поскольку связь между током Iя и потоком Ф не может быть представлена аналитически. Поэтому построение этих характеристик ведется на основе графиков М% (I%) и n% (I%), называемых универсальными характеристиками двигателя (рисунок). Эти характеристики приводятся в каталогах и справочниках для отдельных типов двигателей.
Пуск двигателя постоянного тока последовательного возбуждения.
Rпусск
Rдоп
При этом скорость будет смещаться.
При
подключении R доп. ток через якорь Iя – уменьшается, следовательно Ф –
уменьшается, так как n,
то скорость увеличивается.
Механическая характеристика двигателя последовательного возбуждения,
где 1- реостат., 2-естеств..
Практические аспекты реверсивных двигателей постоянного тока
Введение
В конце прошлого года Дуг написал в блоге сообщение об основах реверсивных двигателей постоянного тока. Поскольку несколько клиентов недавно попросили нас сообщить об этом, мы расширяем эту тему и даем несколько практических советов. Если вас не интересует теория, перейдите к разделу практических выводов в конец.
Являются ли двигатели постоянного тока реверсивными?
Короче говоря, да. Если вы измените напряжение на двигатель, он будет вращаться в противоположном направлении. Причины этого приведены в предыдущем сообщении в блоге. ЯВЛЯЮТСЯ ЛИ ДВИГАТЕЛИ ПОСТОЯННОГО ТОКА РЕВЕРСИВНЫМИ?
Но нам нужно поближе взглянуть на то, что еще здесь происходит…
Моторное поле и геометрия щеток
Постоянные магниты создают постоянное магнитное поле, где линии магнитного потока параллельны друг другу. Перпендикулярно магнитному потоку и пересекая его середину, проходит ось, называемая магнитно-нейтральной плоскостью. Когда двигатель неподвижен, это то же самое, что и геометрическая нейтральная плоскость, которая показана на рисунке ниже зеленым цветом. Магнитная нейтральная плоскость важна, потому что при вращении двигателя не возникает противо-ЭДС, когда якорь пересекает эту точку.
Перпендикулярно магнитному потоку и пересекая его середину, проходит ось, называемая магнитно-нейтральной плоскостью. Когда двигатель неподвижен, это то же самое, что и геометрическая нейтральная плоскость, которая показана на рисунке ниже зеленым цветом. Магнитная нейтральная плоскость важна, потому что при вращении двигателя не возникает противо-ЭДС, когда якорь пересекает эту точку.
Теперь, когда двигатель включен, он вращается, и ток течет через якорь. Это создает магнитное поле, которое взаимодействует с магнитным полем постоянного магнита, создавая вращающую силу, известную как крутящий момент. Что может быть не так очевидно, так это то, что магнитное поле якоря искажает магнитное поле, создаваемое постоянными магнитами. Это, в свою очередь, заставляет магнитно-нейтральную плоскость смещаться от геометрической нейтральной плоскости, как показано на рисунке ниже. Мы можем сказать, что магнитно-нейтральная плоскость опережает или отстает в зависимости от того, идет ли она до или после геометрической нейтральной плоскости.
Чем быстрее вращается ротор двигателя, тем дальше магнитная нейтральная плоскость отдаляется от геометрической нейтральной плоскости. Крутящий момент двигателя самый высокий, когда обратная ЭДС самая низкая, а обратная ЭДС самая низкая в магнитно-нейтральной плоскости. Это дает нам возможность максимизировать крутящий момент, убедившись, что магнитная нейтральная плоскость находится точно в середине сегмента коммутатора, соединяющего катушку якоря, находящуюся под напряжением.
Упрощенно это означает, что, изменив положение коммутатора относительно обмоток якоря, мы можем увеличить крутящий момент двигателя. Этот метод называется продвижением коммутатора и помогает повысить производительность двигателя.
Запуск двигателя с усовершенствованным коммутатором в обратном направлении
Итак, теперь, когда мы поняли, что двигатели могут иметь усовершенствованный коммутатор для повышения производительности, что происходит, когда тот же двигатель работает в обратном направлении?
Ну, магнитная нейтральная плоскость симметрично перевернута относительно оси геометрической нейтральной плоскости, а это означает, что середина коммутатора теперь находится совершенно не на той стороне оси геометрической нейтральной плоскости по отношению к точке наименьшей противо-ЭДС. Это, в свою очередь, означает, что крутящий момент двигателя ниже, когда двигатель работает в этом направлении, что также, вероятно, повлияет на скорость нагруженного двигателя.
Это, в свою очередь, означает, что крутящий момент двигателя ниже, когда двигатель работает в этом направлении, что также, вероятно, повлияет на скорость нагруженного двигателя.
Практические выводы
Подводя итог, вот несколько практических моментов, которые следует учитывать:
- Вы можете запускать двигатели постоянного тока в обоих направлениях.
- Некоторые двигатели постоянного тока будут работать с большей производительностью в одном направлении, чем в другом, из-за усовершенствования коммутатора, встроенного в двигатель при его разработке.
- Двигатели от Precision Microdrives обычно намотаны «нейтрально», то есть без выдвижения коммутатора. Это, в свою очередь, означает, что в основном они должны работать с одинаковой производительностью как в прямом, так и в обратном направлении.
- Направления двигателя указаны в техническом паспорте, а также клеммы + и -.
- Работа двигателя в прямом направлении, вероятно, продлит его срок службы.
 Это связано с тем, что щетки теперь «таскают» по коммутатору, а не «толкают» по коммутатору. Это, в свою очередь, уменьшает вибрацию щетки, что затем снижает количество искрения, которое может возникнуть между щеткой и поверхностями коллектора. Поскольку искрение вызывает эрозию и окисление поверхностей щеток и коллектора, меньшее искрение означает более качественную коммутацию двигателя в течение более длительного времени.
Это связано с тем, что щетки теперь «таскают» по коммутатору, а не «толкают» по коммутатору. Это, в свою очередь, уменьшает вибрацию щетки, что затем снижает количество искрения, которое может возникнуть между щеткой и поверхностями коллектора. Поскольку искрение вызывает эрозию и окисление поверхностей щеток и коллектора, меньшее искрение означает более качественную коммутацию двигателя в течение более длительного времени.
Свяжитесь с нами по телефону
Поговорите с членом нашей команды.
Каталог двигателей
Ищете нашу продукцию?
Надежные, экономичные миниатюрные механизмы и двигатели, отвечающие вашим требованиям.
Узнайте больше
Ресурсы и руководства
Ознакомьтесь с рекомендациями по применению наших продуктов, руководствами по проектированию, новостями и примерами из практики.
Прецизионные микроприводы
Нужен ли вам компонент двигателя или полностью проверенный и испытанный сложный механизм — мы здесь, чтобы помочь. Узнайте больше о нашей компании.
Узнайте больше о нашей компании.
- Почему PMD
- О нас
- Двигатели
- Механизмы
- Карьера
Являются ли двигатели постоянного тока реверсивными? – Прецизионные микроприводы
Проще говоря, двигатели постоянного тока могут вращаться в любом направлении (по часовой стрелке или против часовой стрелки), и ими легко управлять, меняя полярность приложенного напряжения.
Строго говоря, двигатели могут создавать силу в любом направлении. Мы делаем это важное различие, потому что в некоторых приложениях, таких как тактильная обратная связь, используется «торможение» для управления двигателем без фактического вращения в противоположном направлении. Если двигатель уже находится в движении, приложенное напряжение может быть инвертировано, и двигатель будет быстро замедляться, в конечном итоге останавливаясь. Если напряжение продолжает поступать, двигатель снова начнет вращаться в соответствии с полярностью напряжения.
Правило левой руки Флеминга и двигатели постоянного тока
Направление силы и, следовательно, вращение объясняется с помощью правила левой руки Флеминга для двигателей.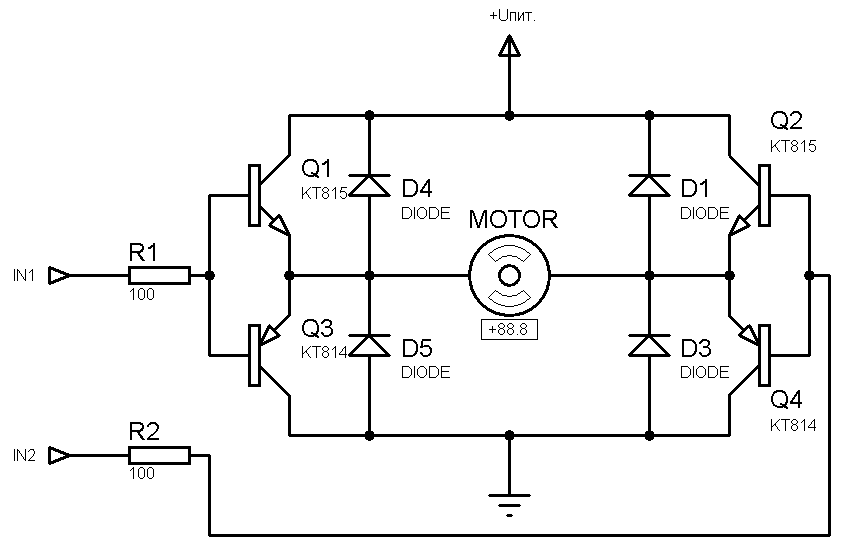
Во-первых, мы будем использовать (очень) упрощенную модель двигателя — представьте два магнита с противоположными полюсами (N и S), разделенные небольшим воздушным зазором, с проводом между ними, по которому течет электрический ток. По сути, так устроен двигатель, хотя в этом упрощенном примере мы представляем однополюсные магниты бесконечной длины, чтобы не вводить такие усложнения, как коммутатор. Эта концепция прекрасно подходит для объяснения важной части теории.
Свяжитесь с нами по телефону
Поговорите с членом нашей команды.
Каталог двигателей
Ищете нашу продукцию?
Надежные, экономичные миниатюрные механизмы и двигатели, отвечающие вашим требованиям.
Когда проводу позволяют свободно двигаться и по нему протекает ток через магнитное поле, на провод действует сила, заставляющая его двигаться. В двигателе катушки могут быть прикреплены к ротору, поэтому, когда сила действует на провод, это вызывает вращение вала. На нашей упрощенной диаграмме мы можем сказать, что движение провода влево эквивалентно вращению двигателя против часовой стрелки, а движение вправо — по часовой стрелке.
На нашей упрощенной диаграмме мы можем сказать, что движение провода влево эквивалентно вращению двигателя против часовой стрелки, а движение вправо — по часовой стрелке.
Теперь применим правило левой руки Флеминга, чтобы определить направление силы. Результирующая сила перпендикулярна как магнитному полю, так и направлению тока. Используя положение руки на изображении в верхней части статьи, вы можете расположить свою левую руку так, как показано на изображении ниже. Возможно, вы захотите подождать, пока останетесь одни в офисе, потому что вы будете выглядеть довольно странно!
- Ваш указательный палец представляет собой магнитное поле, указывающее прямо на пол.
- Ваш средний палец представляет ток и указывает на экран компьютера.
- Большой палец представляет результирующую силу, которая указывает влево.
Это показывает нам, что ток, протекающий по проводу «в» экран компьютера, вызывает силу, толкающую влево, в нашей модели это эквивалентно вращению двигателя против часовой стрелки.
Теперь нас больше всего интересует, как изменить силу, чтобы проволока двигалась в противоположном направлении, заставляя наш мотор вращаться «в обратном направлении». Мы можем снова использовать правило левой руки Флеминга с тем же магнитным полем, но на этот раз большим пальцем будем указывать вправо, а не влево. В результате ваш средний палец теперь должен указывать на вас, показывая ток, вытекающий из экрана.
Это показывает, что для того, чтобы заставить двигатель вращаться по часовой стрелке, мы должны изменить направление тока (т. е. изменение потока тока изменяет направление силы на 180 градусов).
Разумеется, направление тока определяется полярностью напряжения. Таким образом, чтобы изменить направление вращения, мы можем просто изменить напряжение, заставив ток течь в противоположном направлении, изменив силу на 180 градусов, и двигатель будет вращаться «назад».
Практические выводы – как изменить напряжение
Если вы не знакомы с электроникой, изменение полярности напряжения может показаться более сложным, чем это есть на самом деле. На самом деле, вы, скорее всего, будете бороться с логикой управления — то есть решать и командовать, когда менять полярность. Вы можете легко управлять двигателем в любом направлении с помощью одного чипа, однако это зависит от вашего приложения.
На самом деле, вы, скорее всего, будете бороться с логикой управления — то есть решать и командовать, когда менять полярность. Вы можете легко управлять двигателем в любом направлении с помощью одного чипа, однако это зависит от вашего приложения.
Давайте возьмем два примера приложений, которые управляют двигателем в любом направлении, механизм блокировки и устройство тактильной обратной связи.
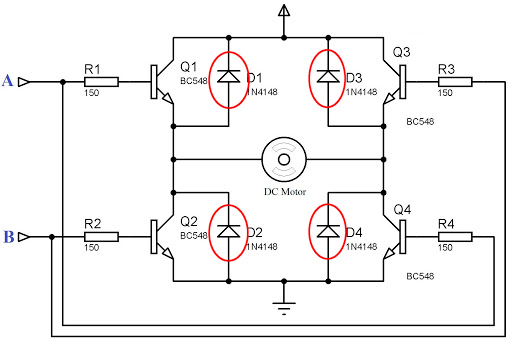
В запорном механизме используется мотор-редуктор, который приводится в движение в любом направлении, чтобы запереть или отпереть дверь. Когда двигателю необходимо фактически вращаться как по часовой стрелке, так и против часовой стрелки, одна из самых популярных управляющих микросхем называется Н-мост. Это дискретные компоненты, в которых размещены 4 транзистора, действующие как переключатели, одна пара переключателей используется для управления двигателем в одном направлении, а два других используются для обратного направления. Управление направлением двигателя (часто простые сигналы GPIO) осуществляется отдельно от напряжения привода, которое управляет скоростью, поэтому вы можете изменять их независимо друг от друга.
