
Подключение шагового двигателя: схема подключения
Шаговый двигатель, биполярный или униполярный, представляет собой электрическое устройство постоянного тока, разделяющее оборот на определённое количество шагов. Количество и величина шагов задаётся специальным устройством, именуемым контроллер шагового двигателя. Схема шаговый двигатель + контроллер шагового двигателя широко применяется в самых различных механизмах, от бытовой техники до ЧПУ. ШД обеспечивает стабильную и бесперебойную работу оборудования, частью которого он является, однако прежде чем начать работу, его необходимо правильно подключить.
Подключение шагового двигателя
В общем и целом процесс подключения шагового двигателя не является затруднительным. В первую очередь нужно определить, какой тип ШД используется. Для этого следует обратить внимание на то, сколькими проводами снабжён электропривод. В зависимости от типа, шаговый двигатель может иметь 4, 5, 6 или 8 проводов.
Шаговый двигатель с 4 проводами может использоваться совместно только с биполярными устройствами.
Шаговый двигатель, оснащённый 6-ю или 8-ю проводами, помимо пары проводов для каждой из обмоток имеет также центр-кран для каждой из них. Такой электродвигатель считается униполярным и может быть подключён как к биполярным, так и к униполярным устройствам. Для разделения провода при подключении униполярного ШД рекомендуется использовать измерительный прибор. Если униполярный шаговый двигатель подключается к однополярному элементу, допускается использование всех проводов. Если же подключение необходимо произвести к биполярному оборудованию, используются один конец провода и один центральный кран для каждой из обмоток.
Шаговый двигатель с 5-ю проводами схож с шестипроводным, однако центральные клеммы такого электродвигателя соединяются внутри сплошным кабелем, после чего выводятся к одному проводу. Разделение проводов в таком механизме – довольно трудоёмкий процесс, который очень сложно произвести без разрывов.
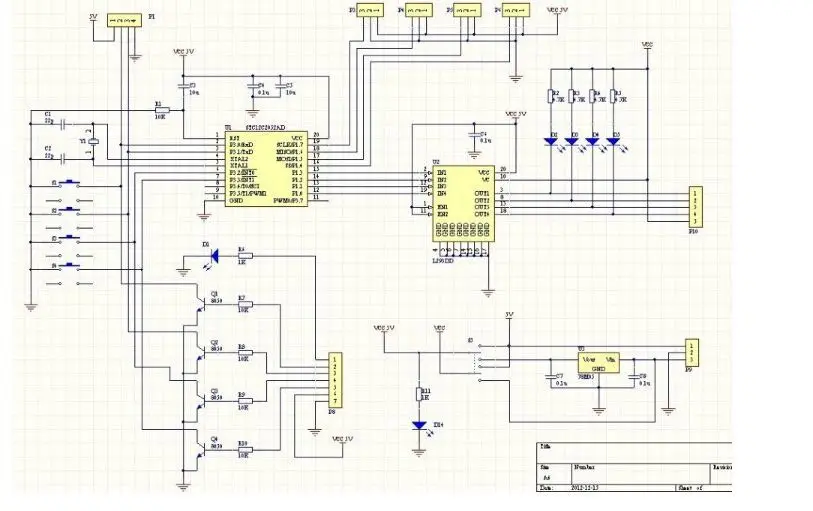
Стандартной схемой, использующейся для подключения 4-выводного биполярного ШД к драйверу или контроллеру является подключение первой обмотки к разъёмам А и А*, а второй – непосредственно к контроллеру через разъёмы B и B*. Разъёмы контроллера Dir и Step при таком методе подключения не используются; программное управление осуществляется при помощи генератора импульсов.
ВНИМАНИЕ – всегда проверяйте цветовую схему выводов, шаговый двигатель от конкретного производителя отличается от абсолютно аналогичного ШД другого производителя, а значит, может иметь другую цветовую схему выводов!
По вопросу подключения шагового двигателя, вы всегда можете обратиться к нашим специалистам по телефону по России (звонок бесплатный) 8 800 5555 068 либо по электронной почте.
Подключение униполярного шагового двигателя NEMA 23 57HM56-2006 к RAMPS 1.
 4 Добрый день 3д печатники и ‘колхозники’.
4 Добрый день 3д печатники и ‘колхозники’.Подключение униполярного шагового двигателя NEMA 23 57HM56-2006 к RAMPS 1.4.
Шаговый униполярный двигатель NEMA 23 57HM56-2006 имеет шесть проводов, и что бы подключить его к Ramp 1.4 или любой другой плате нам потребуется переделать его из униполярного в биполярный.
Шаговый униполярный двигатель NEMA 23 57HM56-2006 имеет ток 2 А, поэтому обычный драйвер шагового двигателя A4998 нам не подойдёт. Я буду использовать драйвер ШД TB6600 и плату MKS CD 57/86, что бы подключить его к ramps.Немного теории.
Биполярный двигатель имеет одну обмотку в каждой фазе, которая для изменения направления магнитного поля должна переполюсовываться драйвером. Для такого типа двигателя требуется мостовой драйвер, или полумостовой с двухполярным питанием. Всего биполярный двигатель имеет две обмотки и, соответственно, четыре вывода.
Униполярный двигатель также имеет одну обмотку в каждой фазе, но от середины обмотки сделан отвод.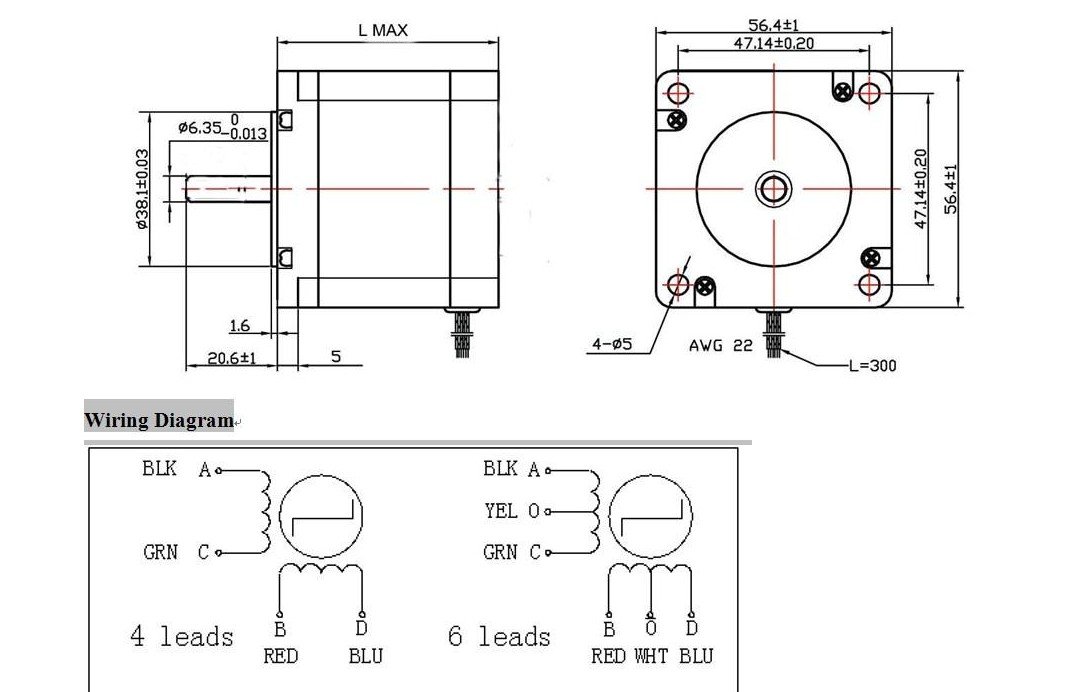 Это позволяет изменять направление магнитного поля, создаваемого обмоткой, простым переключением половинок обмотки. При этом существенно упрощается схема драйвера. Драйвер должен иметь только 4 простых ключа. Таким образом, в униполярном двигателе используется другой способ изменения направления магнитного поля. Средние выводы обмоток могут быть объединены внутри двигателя, поэтому такой двигатель может иметь 5 или 6 выводов. Иногда униполярные двигатели имеют раздельные 4 обмотки, по этой причине их ошибочно называют 4-х фазными двигателями. Каждая обмотка имеет отдельные выводы, поэтому всего выводов 8. При соответствующем соединении обмоток такой двигатель можно использовать как униполярный или как биполярный. Униполярный двигатель с двумя обмотками и отводами тоже можно использовать в биполярном режиме, если отводы оставить неподключенными.
Это позволяет изменять направление магнитного поля, создаваемого обмоткой, простым переключением половинок обмотки. При этом существенно упрощается схема драйвера. Драйвер должен иметь только 4 простых ключа. Таким образом, в униполярном двигателе используется другой способ изменения направления магнитного поля. Средние выводы обмоток могут быть объединены внутри двигателя, поэтому такой двигатель может иметь 5 или 6 выводов. Иногда униполярные двигатели имеют раздельные 4 обмотки, по этой причине их ошибочно называют 4-х фазными двигателями. Каждая обмотка имеет отдельные выводы, поэтому всего выводов 8. При соответствующем соединении обмоток такой двигатель можно использовать как униполярный или как биполярный. Униполярный двигатель с двумя обмотками и отводами тоже можно использовать в биполярном режиме, если отводы оставить неподключенными.
Если сравнивать между собой биполярный и униполярный двигатели, то биполярный имеет более высокую удельную мощность. При одних и тех же размерах биполярные двигатели обеспечивают больший момент.
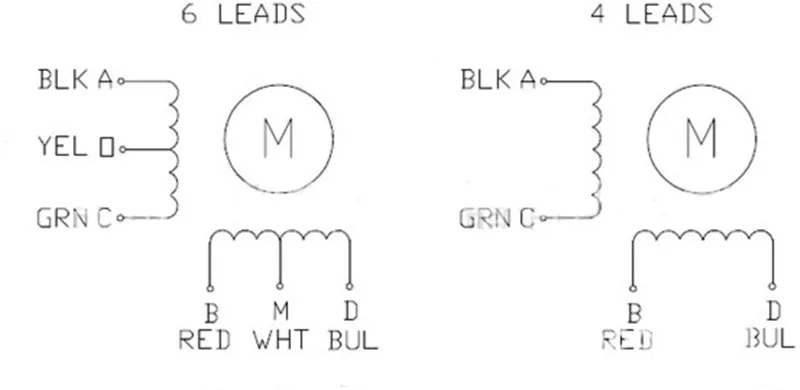
На схеме ниже показаны два двигателя. Слева униполярный, 6 выводов. Справа биполярный, 4 вывода.
Аналогичная схема ниже, но у же с буквенным обозначением выводов.Слева биполярный, справа униполярный двигатель.
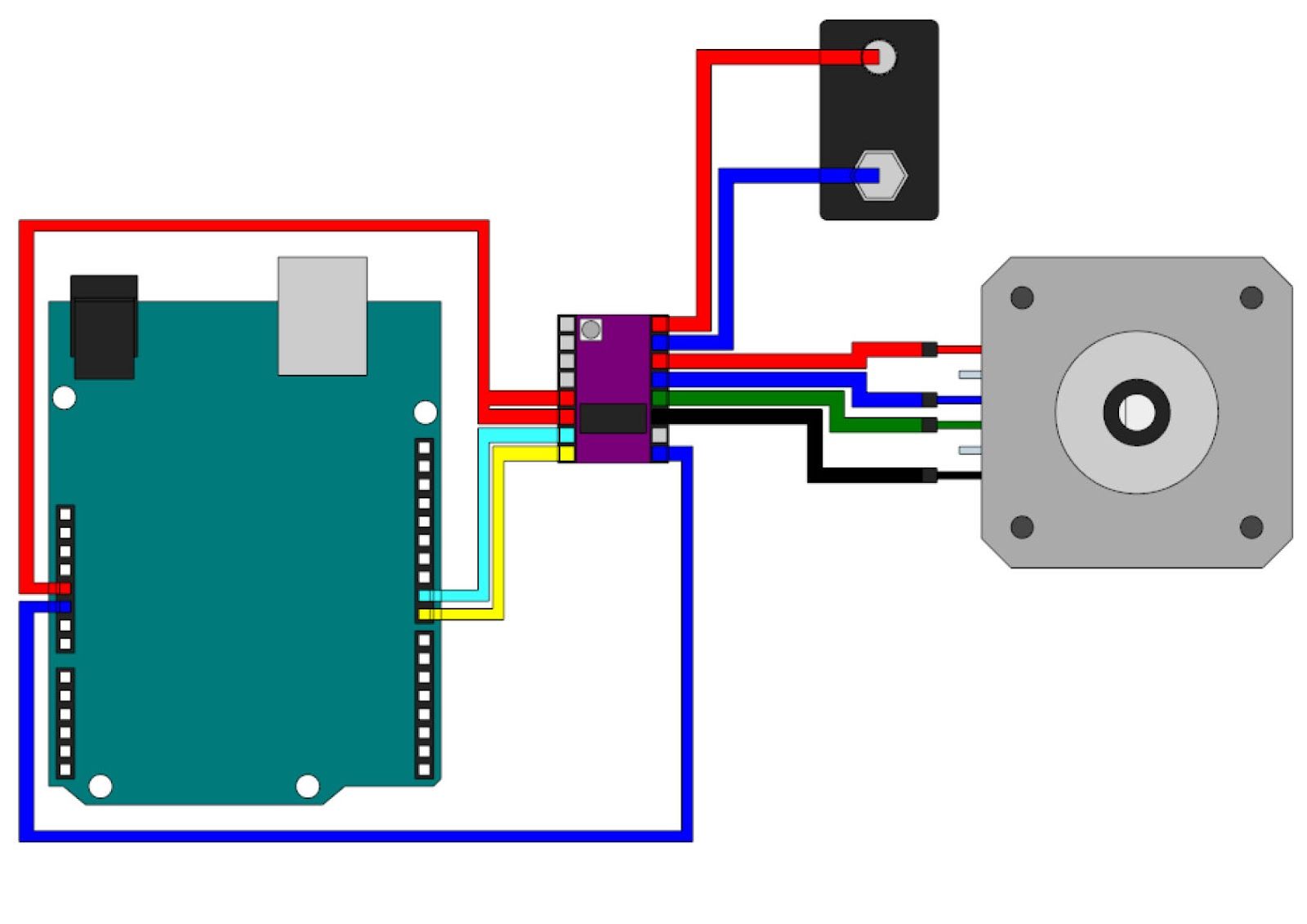
Исходя из схем выше, возможно два варианта переделки униполярного двигателя в биполярный двигатель.Я соберу тестовый стенд для наглядности, который включает в себя: ramps 1.4, arduino mega 2560, драйвер шагового двигателя TB6600, плата MKS CD 57/86 для внешнего драйвера ШД TB6600, LCD Display 2004, шаговый двигатель NEMA 23 57HM56-2006.
1) Первый вариант. Подключаем двигатель к драйверу не используя центральные выводы в обмотках, то есть желтый и белый. Таким способом подключения мы получим высокий момент.
Пошаговая инструкция для чайников :).1) Устанавливаем плату MKS CD 57/86 в штатный разъем ramps 1.4 для шагового драйвера, соблюдая полярность.
2) Подключаем драйвер шагового двигателя TB6600 к плате MKS CD 57/86 кабелем с разъемом PH-4 и PH-4. 3) Подключаем шаговый двигатель NEMA 23 57HM56-2006 к драйверу ШД TB6600. Зеленый провод в разъём 1A, черный в разъём 1B, красный в разъём 2A, синий в разъём 2B. Желтый и белый провода лучше заизолировать, чтоб лишний раз с бубном не прыгать.
4) Подключаем питание от 8-45 В к драйверу шагового двигателя TB6600.
Предыдущие четыре шага на фото ниже.
Подключаем LSD дисплей и питание к ramps 1.4.
Запускаем двигатель и радуемся результату ;).
3) Подключаем шаговый двигатель NEMA 23 57HM56-2006 к драйверу ШД TB6600. Зеленый провод в разъём 1A, черный в разъём 1B, красный в разъём 2A, синий в разъём 2B. Желтый и белый провода лучше заизолировать, чтоб лишний раз с бубном не прыгать.
4) Подключаем питание от 8-45 В к драйверу шагового двигателя TB6600.
Предыдущие четыре шага на фото ниже.
Подключаем LSD дисплей и питание к ramps 1.4.
Запускаем двигатель и радуемся результату ;).1) Устанавливаем плату MKS CD 57/86 в штатный разъем ramps 1.4 для шагового драйвера, соблюдая полярность.
2) Подключаем драйвер шагового двигателя TB6600 к плате MKS CD 57/86 кабелем с разъемом PH-4 и PH-4.
3) Подключаем шаговый двигатель NEMA 23 57HM56-2006 к драйверу ШД TB6600. Зеленый провод в разъём 1A, желтый в разъём 1B, белый в разъём 2A, красный в разъём 2B. Черный и синий провода лучше заизолировать, не ну если Вам нравится прыгать с бубном то не делайте этого.
4) Подключаем питание от 8-45 В к драйверу шагового двигателя TB6600. Предыдущие четыре шага на фото ниже. Подключаем LSD дисплей и питание к ramps 1.4.Таким образом, подключить униполярный шаговый двигатель к ramps 1.4 не так уж и сложно, достаточно немного знать теории и быть внимательным. Надеюсь, что теперь Вам помощь бубна в этой теме не потребуется ;).1. Шаговый двигатель nema 23 57HM56-2006;
2. Драйвер шагового двигателя TB6600;
Драйвер шагового двигателя TB6600;
3. Шилд (надстройка) RAMPS 1.4;
4. Плата управления arduino mega 2560;
5. Плата МКС CD 57/86 для внешнего драйвера;
6. LCD Display 2004 RAMPS 1.4.
З.Ы.
Как работают шаговые двигатели
Что такое шаговый двигатель?
Прежде всего, шаговый двигатель — это двигатель. Это означает, что он преобразует электрическую энергию в механическую. Основное отличие между ним и всеми остальными типами двигателей состоит в способе, благодаря которому происходит вращение. В отличие от других моторов, шаговые двигатели вращаются НЕ непрерывно! Вместо этого, они вращаются шагами (отсюда и их название). Каждый шаг представляет собой часть полного оборота. Эта часть зависит, в основном, от механического устройства мотора и от выбранного способа управления им. Шаговые двигатели также различаются способами питания. В отличие от двигателей переменного или постоянного тока, обычно они управляются импульсами. Каждый импульс преобразуется в градус, на который происходит вращение. Например, 1.8º шаговый двигатель, поворачивает свой вал на 1.8° при каждом поступающем импульсе. Часто, из-за этой характеристики, шаговые двигатели еще называют цифровыми.
Каждый импульс преобразуется в градус, на который происходит вращение. Например, 1.8º шаговый двигатель, поворачивает свой вал на 1.8° при каждом поступающем импульсе. Часто, из-за этой характеристики, шаговые двигатели еще называют цифровыми.
Основы работы шагового двигателя
Как и все моторы, шаговые двигатели состоят из статора и ротора. На роторе установлены постоянные магниты, а в состав статора входят катушки (обмотки). Шаговый двигатель, в общем случае, выглядит следующим образом:
Здесь мы видим 4 обмотки, расположенные под углом 90° по-отношению друг к другу, размещенные на статоре. Различия в способах подключения обмоток в конечном счете определяют тип подключения шагового двигателя. На рисунке выше, обмотки не соединяются вместе. Мотор по такой схеме имеет шаг поворота равный 90°. Обмотки задействуются по кругу — одна за другой. Направление вращения вала определяется порядком, в котором задействуются обмотки. Ниже показана работа такого мотора. Ток через обмотки протекает с интервалом в 1 секунду. Вал двигателя поворачивается на 90° каждый раз, когда через катушку протекает ток.
Ток через обмотки протекает с интервалом в 1 секунду. Вал двигателя поворачивается на 90° каждый раз, когда через катушку протекает ток.
Режимы управления
Теперь рассмотрим различные способы подачи тока на обмотки и увидим, как в результате вращается вал мотора.
Волновое управление или полношаговое управление одной обмоткой
Этот способ описан выше и называется волновым управлением одной обмоткой. Это означает, что только через одну обмотку протекает электрический ток. Этот способ используется редко. В основном, к нему прибегают в целях снижения энергопотребления. Такой метод позволяет получить менее половины вращающего момента мотора, следовательно, нагрузка мотора не может быть значительной.
У такого мотора будет 4 шага на оборот, что является номинальным числом шагов.
Полношаговый режим управления
Вторым, и наиболее часто используемым методом, является полношаговый метод. Для реализации этого способа, напряжение на обмотки подается попарно. В зависимости от способа подключения обмоток (последовательно или параллельно), мотору потребуется двойное напряжение или двойной ток для работы по отношению к необходимым при возбуждении одной обмотки. В этом случае мотор будет выдавать 100% номинального вращающего момента.
В зависимости от способа подключения обмоток (последовательно или параллельно), мотору потребуется двойное напряжение или двойной ток для работы по отношению к необходимым при возбуждении одной обмотки. В этом случае мотор будет выдавать 100% номинального вращающего момента.
Такой мотор имеет 4 шага на полный оборот, что и является номинальным числом шагов для него.
Полушаговый режим
Это очень интересный способ получить удвоенную точность системы позиционирования, не меняя при этом ничего в «железе»! Для реализации этого метода, все пары обмоток могут запитываться одновременно, в результате чего, ротор повернется на половину своего нормального шага. Этот метод может быть также реализован с использованием одной или двух обмоток. Ниже показано, как это работает.
Однообмоточный режим
Двухобмоточный режим
Используя этот метод, тот же самый мотор сможет дать удвоенное число шагов на оборот, что означает двойную точность для системы позиционирования. Например, этот мотор даст 8 шагов на оборот!
Например, этот мотор даст 8 шагов на оборот!
Режим микрошага
Микрошаговый режим наиболее часто применяемый способ управления шаговыми двигателями на сегодняшний день. Идея микрошага состоит в подаче на обмотки мотора питания не импульсами, а сигнала, по своей форме, напоминающего синусоиду. Такой способ изменения положения при переходе от одного шага к другому позволяет получить более гладкое перемещение, делая шаговые моторы широко используемыми в таких приложениях как системы позиционирования в станках с ЧПУ. Кроме этого, рывки различных деталей, подключенных к мотору, также как и толчки самого мотора значительно снижаются. В режиме микрошага, шаговый мотор может вращаться также плавно как и обычные двигатели постоянного тока.
Форма тока, протекающего через обмотку похожа на синусоиду. Также могут использоваться формы цифровых сигналов. Вот некоторые примеры:
Метод микрошага является в действительности способом питания мотора, а не методом управления обмотками. Следовательно, микрошаг можно использовать и при волновом управлении и в полношаговом режиме управления. Ниже продемонстрирована работа этого метода:
Следовательно, микрошаг можно использовать и при волновом управлении и в полношаговом режиме управления. Ниже продемонстрирована работа этого метода:
Хотя кажется, что в режиме микрошага шаги становятся больше, но, на самом деле, этого не происходит. Для повышения точности часто используются трапецевидные шестерни. Этот метод используется для обеспечения плавного движения.
Типы шаговых двигателей
Шаговый двигатель с постоянным магнитом
Ротор такого мотора несет постоянный магнит в форме диска с двумя или большим количеством полюсов. Работает точно также как описано выше. Обмотки статора будут притягивать или отталкивать постоянный магнит на роторе и создавать тем самым крутящий момент. Ниже представлена схема шагового двигателя с постоянным магнитом.
Обычно, величина шага таких двигателей лежит в диапазоне 45-90°.
Шаговый двигатель с переменным магнитным сопротивлением
У двигателей этого типа на роторе нет постоянного магнита. Вместо этого, ротор изготавливается из магнитомягкого металла в виде зубчатого диска, типа шестеренки. Статор имеет более четырех обмоток. Обмотки запитываются в противоположных парах и притягивают ротор. Отсутствие постоянного магнита отрицательно влияет на величину крутящего момента, он значительно снижается. Но есть и большой плюс. У этих двигателей нет стопорящего момента. Стопорящий момент — это вращающий момент, создаваемый постоянными магнитами ротора, которые притягиваются к арматуре статора при отсутствии тока в обмотках. Можно легко понять, что это за момент, если попытаться повернуть рукой отключенный шаговый двигатель с постоянным магнитом. Вы почувствуете различимые щелчки на каждом шаге двигателя. В действительности то, что вы ощутите и будет фиксирующим моментом, который притягивает магниты к арматуре статора. Ниже показана работа шагового двигателя с переменным магнитным сопротивлением.
Вместо этого, ротор изготавливается из магнитомягкого металла в виде зубчатого диска, типа шестеренки. Статор имеет более четырех обмоток. Обмотки запитываются в противоположных парах и притягивают ротор. Отсутствие постоянного магнита отрицательно влияет на величину крутящего момента, он значительно снижается. Но есть и большой плюс. У этих двигателей нет стопорящего момента. Стопорящий момент — это вращающий момент, создаваемый постоянными магнитами ротора, которые притягиваются к арматуре статора при отсутствии тока в обмотках. Можно легко понять, что это за момент, если попытаться повернуть рукой отключенный шаговый двигатель с постоянным магнитом. Вы почувствуете различимые щелчки на каждом шаге двигателя. В действительности то, что вы ощутите и будет фиксирующим моментом, который притягивает магниты к арматуре статора. Ниже показана работа шагового двигателя с переменным магнитным сопротивлением.
Шаговые двигатели с переменным магнитным сопротивлением обычно имеют шаг, лежащий в диапазоне 5-15°.
Гибридный шаговый двигатель
Данный тип шаговых моторов получил название «гибридный» из-за того, что сочетает в себе характеристики шаговых двигателей и с постоянными магнитами и с переменным магнитным сопротивлением. Они обладают отличными удерживающим и динамическим крутящим моментами, а также очень маленькую величину шага, лежащую в пределах 0.9-5°, обеспечивая великолепную точность. Их механические части могут вращаться с большими скоростями, чем другие типы шаговых моторов. Этот тип двигателей используется в станках ЧПУ high-end класса и в роботах. Главный их недостаток — высокая стоимость.
Обычный мотор с 200 шагами на оборот будет иметь 50 положительных и 50 отрицательных полюсов с 8-ю обмотками (4-мя парами). Из-за того, что такой магнит нельзя произвести, было найдено элегантное решение. Берется два отдельных 50-зубых диска. Также используется цилиндрический постоянный магнит. Диски привариваются один с положительному, другой к отрицательному полюсам постоянного магнита. Таким образом, один диск имеет положительный полюс на своих зубьях, другой — отрицательный.
Два 50-зубых диска помещены сверху и снизу постоянного магнита
Фокус в том, что диски размещаются таким образом, что если посмотреть на них сверху, то они выглядят как один 100-зубый диск! Возвышения на одном диске совмещаются со впадинами на другом.
Впадины на одном диске выровнены с возвышениями на другом
Ниже показана работа гибридного шагового двигателя, имеющего 75 шагов на оборот (1.5° на шаг). Стоит заметить, что 6 обмоток спарены, каждая имеет обмотку с противоположной стороны. Вы наверняка ожидали, что катушки расположены под углом в 60° следом друг за другом, но, на самом деле, это не так. Если предположить, что первая пара — это самая верхняя и самая нижняя катушки, тогда вторая пара смещена под углом 60+5° по отношению к первой, и третья смещена на 60+5° по отношению ко второй. Угловая разница и является причиной вращения мотора. Режимы управления с полным и половинным шагом могут использоваться, впрочем как и волновое управление для снижения энергопотребления.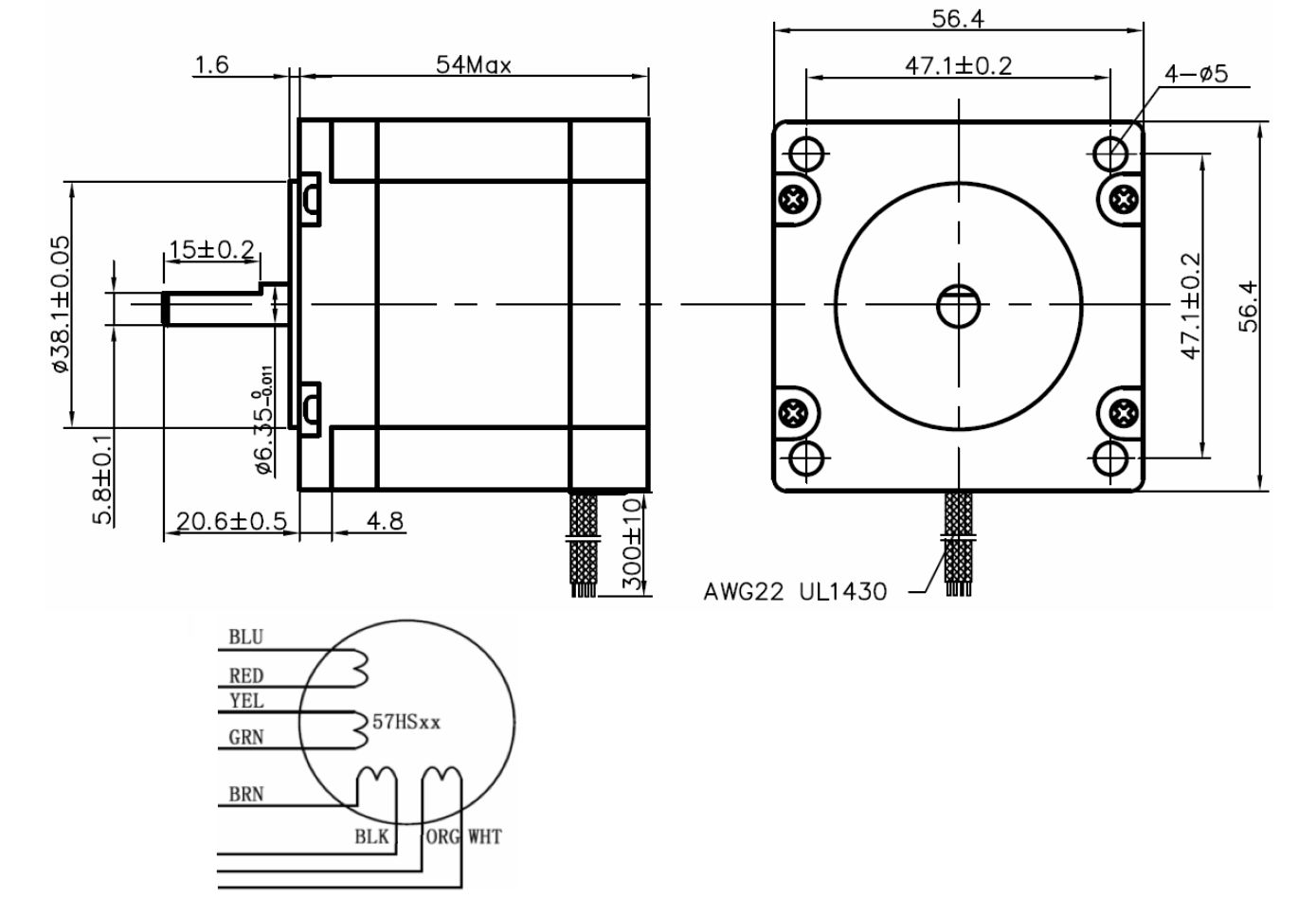 Ниже продемонстрировано полношаговое управление. В полушаговом режиме, число шагов увеличится до 150!
Ниже продемонстрировано полношаговое управление. В полушаговом режиме, число шагов увеличится до 150!
Не пытайтесь следовать за обмотками, чтобы понаблюдать, как это работает. Просто сфокусируйтесь на одной обмотке и ждите. Вы заметите, что всякий раз, когда обмотка задействована, есть 3 положительных полюса (красный) в 5° позади, которые притягиваются по направлению вращения и другие 3 отрицательных полюса (синий) в 5° впереди, которые толкаются в направлении вращения. Задействованная обмотка всегда находится между положительным и отрицательным полюсами.
Подключение обмоток
Шаговые двигатели относятся к многофазным моторам. Больше обмоток, значит, больше фаз. Больше фаз, более гладкая работа мотора и более выокая стоимость. Крутящий момент не связан с числом фаз. Наибольшее распространение получили двухфазные двигатели. Это минимальное количество необходимых для того, чтобы шаговый мотор функционировал. Здесь необходимо понять, что число фаз не обязательно определяет число обмоток. Например, если каждая фаза имеет 2 пары обмоток и мотор является двухфазным, то количество обмоток будет равно 8. Это определяет только механические характеристики мотора. Для упрощения, я рассмотрю простейший двухфазный двигатель с одной парой обмоток на фазу.
Например, если каждая фаза имеет 2 пары обмоток и мотор является двухфазным, то количество обмоток будет равно 8. Это определяет только механические характеристики мотора. Для упрощения, я рассмотрю простейший двухфазный двигатель с одной парой обмоток на фазу.
Существует три различных типа подключения для двухфазных шаговых двигателей. Обмотки соединяются между собой, и, в зависимости от подключения, используется различное число проводов для подключения мотора к контроллеру.
Биполярный двигатель
Это наиболее простая конфигурация. Используются 4 провода для подключения мотора к контроллеру. Обмотки соединяются внутри последовательно или параллельно. Пример биполярного двигателя:
Мотор имеет 4 клеммы. Два желтых терминала (цвета не соответствуют стандартным!) питают вертикальную обмотку, два розовых — горизонтальную обмотку. Проблема такой конфигурации состоит в том, что если кто-то захочет изменить магнитную полярность, то единственным способом будет изменение направления электрического тока. Это означает, что схема драйвера усложнится, например это будет H-мост.
Это означает, что схема драйвера усложнится, например это будет H-мост.
Униполярный двигатель
В униполярном двигателе общий провод подключен к точке, где две обмотки соединены вместе:
Используя этот общий провод, можно легко изменить магнитные полюса. Предположим, например, что мы подключили общий провод к земле. Запитав сначала один вывод обмотки, а затем другой — мы изменяем магнитные полюса. Это означает, что схема для использования биполярного двигателя очень простая, как правило, состоит только из двух транзисторов на фазу. Основным недостатком является то, что каждый раз, используется только половина доступных катушечных обмоток. Это как при волновом управлении двигателем с возбуждением одной обмотки. Таким образом, крутящий момент всегда составляет около половины крутящего момента, который мог быть получен, если бы обе катушки были задействованы. Другими словами, униполярные электродвигатели должны быть в два раза более габаритными, по сравнению с биполярным двигателем, чтобы обеспечить такой же крутящий момент. Однополярный двигатель может использоваться как биполярный двигатель. Для этого нужно оставить общий провод неподключенным.
Однополярный двигатель может использоваться как биполярный двигатель. Для этого нужно оставить общий провод неподключенным.
Униполярные двигатели могут иметь 5 или 6 выводов для подключения. На рисунке выше продемонстрирован униполярный мотор с 6 выводами. Существуют двигатели, в которых два общих провода соединены внутри. В этом случае, мотор имеет 5 клемм для подключения.
8-выводной шаговый двигатель
Это наиболее гибкий шаговый мотор в плане подключения. Все обмотки имеют выводы с двух сторон:
Этот двигатель может быть подключен любым из возможных способов. Он может быть подключен как:
- 5 или 6-выводной униполярный,
- биполярный с последовательно соединенными обмотками,
- биполярный с параллельно соединенными обмотками,
- биполярный с одним подключением на фазу для приложений с малым потреблением тока
Как подобрать шаговый двигатель для станка ЧПУ. ШД из принтера.
Любая
разработка начинается с выбора
компонентов.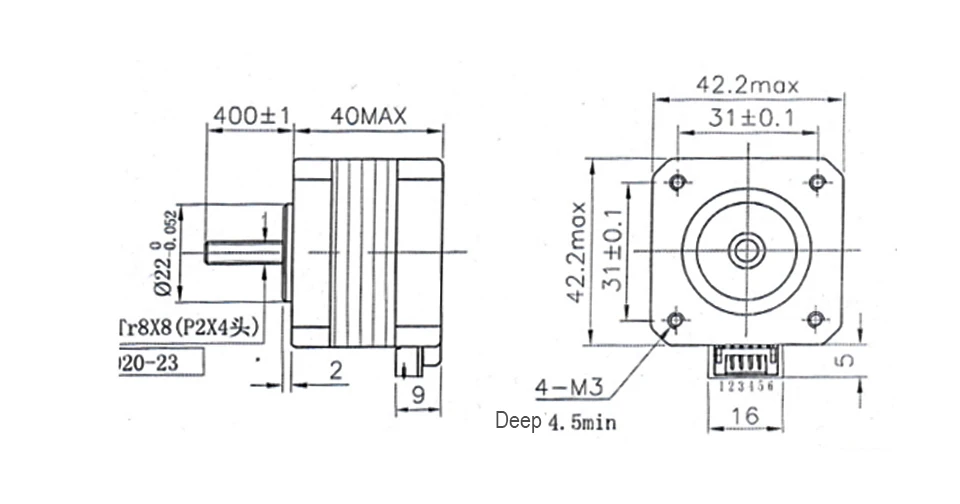 При
разработке ЧПУ станка
очень важно правильно подобрать шаговые
двигателя
. Если у вас есть деньги на
покупку новых двигателей, в таком случае
нужно определить рабочее напряжения и
мощность двигателя. Я купил себе для
второго
ЧПУ станка шаговые двигателя
вот такие:
Nema17 1.7 А.
При
разработке ЧПУ станка
очень важно правильно подобрать шаговые
двигателя
. Если у вас есть деньги на
покупку новых двигателей, в таком случае
нужно определить рабочее напряжения и
мощность двигателя. Я купил себе для
второго
ЧПУ станка шаговые двигателя
вот такие:
Nema17 1.7 А.
Если у вас нет достаточно денег или вы просто пробуете свои силы в данной сфере. То вы скорее всего будите использовать двигателя из принтеров . Это самый недорогой вариант. Но тут Вы столкнетесь с рядом проблем. У двигателя может быть 4, 5, 6, 8 — проводов для подключения. Как их подключить к драйверам L298n и СNC shield.
Давайте
разберемся по порядку. Какие шаговые
двигателя бывают. Если вы видите
четное количество выводов это
биполярный
шаговый двигатель
. Расположение обмотки
для данного двигателя
вот такое.
Расположение обмотки
для данного двигателя
вот такое.
Если
у двигателя
5 выводов, это
униполярный шаговый
двигатель
. Вот так выгладит
его схема.
Наши драйвера рассчитаны на двигателя с 4 выводами . Как быть? Как их подключить?
Биполярные ШД с 6-ю выводами подключаются к драйверу двумя способами:
В
данном случае ШД имеет момент в 1.4 раза
больше. Момент более стабилен на низких
частотах.
При
таком типе подключения нужно уменьшить
ток, подаваемый на обмотки двигателя
в √2 раз. Например, если номинальный
рабочий ток двигателя составляет 2 А,
то при последовательном включении
обмоток требуемый ток – 1.4 А, то есть в
1.4 раза меньше.
Это можно легко понять из следующих рассуждений.
Номинальный
рабочий ток, указанный в каталоге,
рассчитан на сопротивление одной обмотки
(R – именно оно приведено в каталоге). При
последовательном включении обмоток
сопротивление объединенной обмотки
возрастает в два раза (2R).
При
последовательном включении обмоток
сопротивление объединенной обмотки
возрастает в два раза (2R).
Потребляемая мощность ШД — I*2 * R
При последовательном включении обмоток потребляемая мощность становится Iпосл.*2 * 2 * R
Потребляемая мощность не зависит от типа подключения, поэтому I*2 * R = Iпосл.*2 * 2* R, откуда
Iпосл.= I/ √2, т.е.
Iпосл.= 0.707 *I.
Так как крутящий момент двигателя прямо пропорционален величине магнитного поля, создаваемого обмотками статора, то он возрастает с увеличением числа витков обмотки и убывает с уменьшением ток, пропускаемого через обмотки. Но так как ток уменьшился в √2 раз, а число витков обмотки увеличилось в 2 раза, то крутящий момент возрастет в √2 раз.
Tпосл. = 1.4 * T.
Во
втором случае момент
более стабилен на высоких частотах. Параметры ШД при таком подключении
соответствуют заявленным в
datasheet,
(момент, ток), момент более стабилен на
высоких частотах
.
Параметры ШД при таком подключении
соответствуют заявленным в
datasheet,
(момент, ток), момент более стабилен на
высоких частотах
.
Униполярный шаговый двигатель можно переделать.
Для этого нужно разобрать шаговый
двигатель и перерезать провод соединяющий
центр обмоток. И при подключении общий
провод подключать ни куда не нужно.
В итоге у нас получается биполярный двигатель с 4 выводами.
Шаговые двигателя с 8-ю выводами можно подключить тремя способами.
Подключение А – шаговик работает с характеристиками, заявленными в описании (момент, ток), момент более стабилен на высоких частотах.
Подключение B – момент ↑1.4 раза, момент более стабилен на низких частотах (относительно А).
Подключение
C – момент ↑1.96 раза, момент более
стабилен на высоких частотах (относительно
А).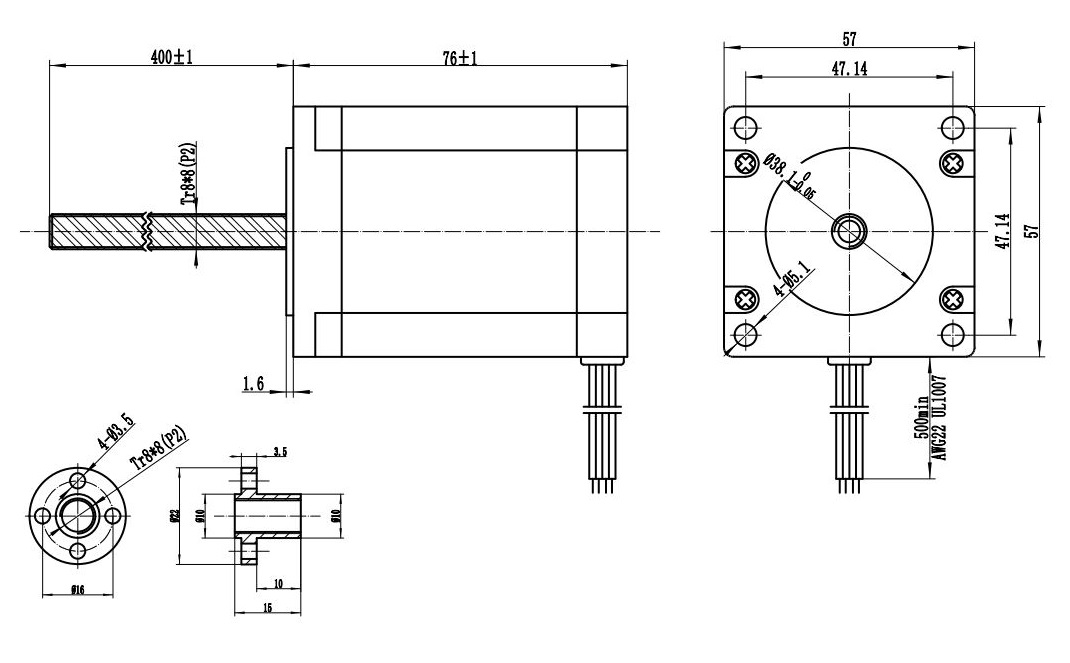
Вот мы и решили проблему подключения шаговых двигателей. Но не все двигателя у нас заработают. Нужно еще определить рабочее напряжение двигателей. Самый правильный способ это найти datasheet. Так все параметры есть. Но не ко все двигателя из принтера можно найти datasheet. В таких случаях я пользуюсь вот такой таблицой.
|
Сопротивление обмотки, Ом |
Рабочее напряжение, В |
|
5-15 |
5 |
|
30-60 |
12 |
|
60-120 |
24 |
Не
знаю на сколько данная таблица верная
но у меня все сходиться и работает как
надо.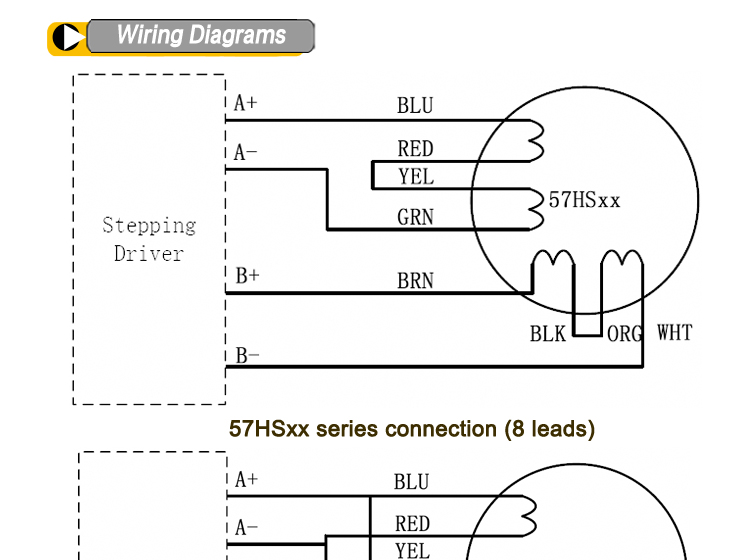
Двигателя я выбираю чтобы рабочее напряжение было меньше или равно напряжению источника питания. Для двигателей рассчитанных на меньшее напряжения необходимо настроить ток ниже.
Настраивать СNC shield будем в следующей статье. Не пропустите!
Подписывайтесь на мой канал на Youtube и вступайте в группы в Вконтакте и Facebook.
Спасибо за внимание!
Понравилась статья? Поделитесь ею с друзьями:
Определение сечения провода для подключения шаговых двигателей AWG
Таблица перевода калибров AWG в миллиметры. Сечение кабеля по току.
Американский калибр проводов (AWG от англ. American Wire Gauge) —американская система маркирования толщины проводов, использующаяся с 1857 года преимущественно в США.
American Wire Gauge) —американская система маркирования толщины проводов, использующаяся с 1857 года преимущественно в США.
В этой системе меньшему числовому значению соответствует более толстый провод.
|
AWG |
Площадь сечения S, мм2 |
Диаметр, мм |
Удельное сопротивление, Ом/м |
Допустимый ток в медной жиле, A |
|
36 |
0,013 |
0,127 |
1,36 |
0,13 |
|
35 |
0,016 |
0,143 |
1,08 |
0,16 |
|
34 |
0,020 |
0,160 |
0,856 |
0,20 |
|
33 |
0,025 |
0,180 |
0,679 |
0,25 |
|
32 |
0,032 |
0,202 |
0,538 |
0,32 |
|
31 |
0,040 |
0,227 |
0,427 |
0,40 |
|
30 |
0,051 |
0,255 |
0,339 |
0,51 |
|
29 |
0,064 |
0,286 |
0,268 |
0,64 |
|
28 |
0,081 |
0,321 |
0,213 |
0,81 |
|
27 |
0,102 |
0,361 |
0,169 |
1,02 |
|
26 |
0,129 |
0,405 |
0,134 |
1,29 |
|
25 |
0,162 |
0,455 |
0,106 |
1,62 |
|
24 |
0,205 |
0,511 |
0,0842 |
2,05 |
|
23 |
0,258 |
0,573 |
0,0668 |
2,58 |
|
22 |
0,326 |
0,644 |
0,0530 |
3,26 |
|
21 |
0,410 |
0,723 |
0,0420 |
4,10 |
|
20 |
0,518 |
0,812 |
0,0333 |
5,18 |
|
19 |
0,653 |
0,912 |
0,0264 |
6,53 |
|
18 |
0,823 |
1,024 |
0,0210 |
8,23 |
|
17 |
1,038 |
1,150 |
0,0166 |
10,38 |
|
16 |
1,309 |
1,291 |
0,0132 |
13,09 |
|
15 |
1,650 |
1,450 |
0,0104 |
16,50 |
|
14 |
2,081 |
1,628 |
0,0083 |
20,81 |
|
13 |
2,624 |
1,828 |
0,0066 |
26,24 |
|
12 |
3,309 |
2,053 |
0,0052 |
33,09 |
|
11 |
4,172 |
2,305 |
0,0041 |
41,72 |
|
10 |
5,261 |
2,588 |
0,0033 |
52,61 |
|
9 |
6,634 |
2,906 |
0,0026 |
66,34 |
|
8 |
8,366 |
3,264 |
0,0021 |
83,66 |
|
7 |
10,549 |
3,665 |
0,0016 |
105,49 |
|
6 |
13,302 |
4,115 |
0,0013 |
133,02 |
|
5 |
16,773 |
4,621 |
0,0010 |
167,73 |
|
4 |
21,151 |
5,189 |
0,0008 |
211,51 |
|
3 |
26,670 |
5,827 |
0,0006 |
266,70 |
|
2 |
33,631 |
6,544 |
0,0005 |
336,31 |
|
1 |
42,408 |
7,348 |
0,0004 |
424,08 |
|
0 |
53,475 |
8,251 |
0,0003 |
534,75 |
Из примера максимальный ток шагового двигателя 3,5А, что соответствует 21AWG
Как определить сечение провода
Чем больше нужно подать воды, тем большего диаметра нужна труба, так и для тока.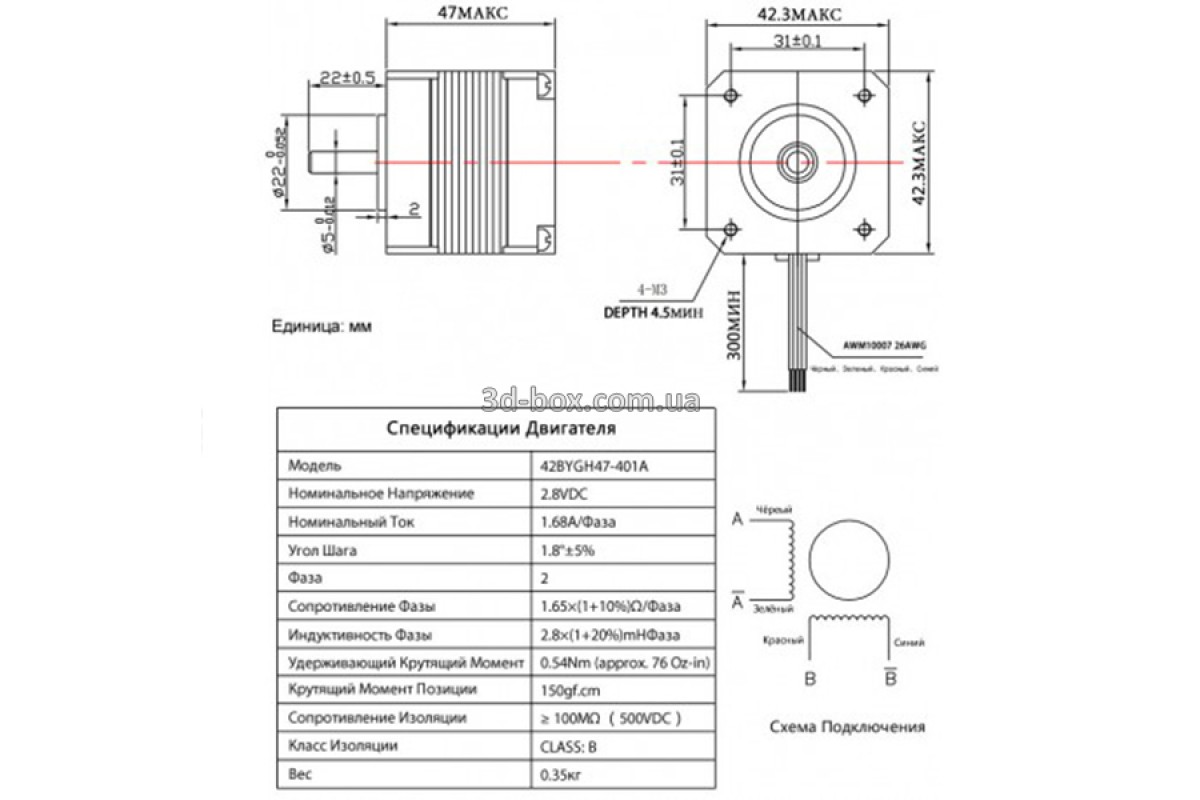 Чем больше потребляемая величина тока электроприборами, тем больше должно быть сечение жил проводов в кабеле.
Чем больше потребляемая величина тока электроприборами, тем больше должно быть сечение жил проводов в кабеле.
Что же такое сечение жил провода и как его найти? Если вы перекусите провод и посмотрите на него с торца, то увидите жилу провода, вот площадь торца этой жилы, то есть площадь круга и есть сечение провода. Чем диаметр круга больше, тем больше сечение провода и, следовательно, провод способен, передать больший ток.
S = 3,14*r2
или
S = 0,785*d2
где d– диаметр кабеля
|
Таблица соответствия стандартных сечений жил проводов их диаметрам |
|||||||||||||||
|
Сечение жилы провода S, мм2 |
0,07 |
0,13 |
0,20 |
0,28 |
0,38 |
0,50 |
0,64 |
0,79 |
0,95 |
1,13 |
1,33 |
1,54 |
1,77 |
2,01 |
2,27 |
|
Диаметр жилы, мм |
0,3 |
0,4 |
0,5 |
0,6 |
0,7 |
0,8 |
0,9 |
1,0 |
1,1 |
1,2 |
1,3 |
1,4 |
1,5 |
1,6 |
1,7 |
Плотность тока характеризуется величиной тока в Амперах, протекающего через единицу сечения проводника, которую мы примем за 1мм2. Поскольку эта величина относительная, то с ее использованием удобно производить расчет сечения по следующим формулам:
d=√1.27*I/Iρ=1.1*√I/Iρ – получаем значение диаметра провода,
S=0.785*d2 – ранее полученная формула для расчета сечения,
Подставляем первую формулу во вторую, округляем все что можно, получаем очень простое соотношение:
S=I/Iρ
Остается определиться с величиной плотности тока Iρ, поскольку рабочий ток I определяется мощностью нагрузки
Допустимое значение плотности тока определяется множеством факторов, рассмотрение которых я опущу и приведу конечные результаты, причем с запасом:
|
Материал провода |
Плотность тока |
|
Медь |
Iρ=10 А/мм2 |
|
Алюминий |
Iρ=6 А/мм2 |
Пример расчета:
Имеем: максимальная сила тока на обмотках шагового двигателя 3,5А
S=I/Iρ=3,5/10=0,35мм2
I=S*Ip
Соответственно формула для расчета диаметра жилы для шагового двигателя:
d=1.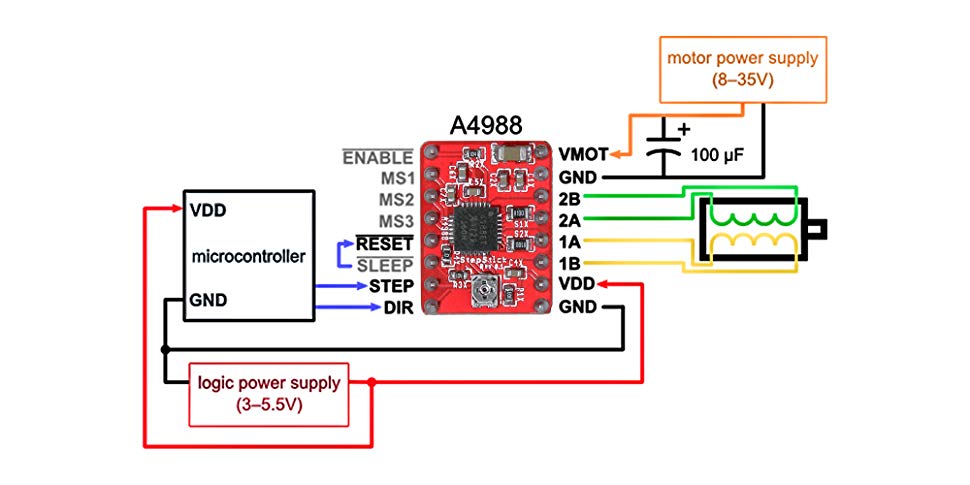 1*√I/Iρ – получаем значение диаметра провода,
1*√I/Iρ – получаем значение диаметра провода,
d=1.1*√3.5/10=0.65
Подключение униполярного шагового двигателя
Добавлено в закладки: 1
Доброго времени суток!Шаговый униполярный двигатель nema 23 57HM56-2006 имеет шесть выводов, и что бы подключить его к RAMPS 1.4 или любой другой плате нам потребуется переделать его из униполярного в биполярный.
Шаговый униполярный двигатель NEMA 23 57HM56-2006 имеет ток 2 А. Обычный драйвер ШД A4988 годится, но с ним двигатель не будет выдавать заявленных 10 кг момент, поэтому я буду использовать драйвер ШД TB6600 и плату MKS CD 57/86, что бы подключить его к ramps.
Немного теории
Биполярный двигатель имеет одну обмотку в каждой фазе, которая для изменения направления магнитного поля должна переполюсовываться драйвером. Для такого типа двигателя требуется мостовой драйвер, или полумостовой с двухполярным питанием. Всего биполярный двигатель имеет две обмотки и, соответственно, четыре вывода.
Для такого типа двигателя требуется мостовой драйвер, или полумостовой с двухполярным питанием. Всего биполярный двигатель имеет две обмотки и, соответственно, четыре вывода.
Униполярный двигатель также имеет одну обмотку в каждой фазе, но от середины обмотки сделан отвод. Это позволяет изменять направление магнитного поля, создаваемого обмоткой, простым переключением половинок обмотки. При этом существенно упрощается схема драйвера. Драйвер должен иметь только 4 простых ключа. Таким образом, в униполярном двигателе используется другой способ изменения направления магнитного поля. Средние выводы обмоток могут быть объединены внутри двигателя, поэтому такой двигатель может иметь 5 или 6 выводов. Иногда униполярные двигатели имеют раздельные 4 обмотки, по этой причине их ошибочно называют 4-х фазными двигателями. Каждая обмотка имеет отдельные выводы, поэтому всего выводов 8. При соответствующем соединении обмоток такой двигатель можно использовать как униполярный или как биполярный. Униполярный двигатель с двумя обмотками и отводами тоже можно использовать в биполярном режиме, если отводы оставить неподключенными.
Если сравнивать между собой биполярный и униполярный двигатели, то биполярный имеет более высокую удельную мощность. При одних и тех же размерах биполярные двигатели обеспечивают больший момент.
На схеме ниже показаны два двигателя. Слева униполярный, 6 выводов. Справа биполярный, 4 вывода.
Аналогичная схема ниже, но у же с буквенным обозначением выводов.
Слева биполярный, справа униполярный двигатель.
Исходя из схем выше, возможно два варианта переделки униполярного двигателя в биполярный двигатель.
Для наглядности этого процесса, мы собрали для Вас тестовый стенд, который включает в себя: ramps 1.4, arduino mega 2560, Драйвер шагового двигателя TB6600, плата МКС CD 57/86 для внешнего драйвера ШД TB6600, LCD Display 2004, шаговый двигатель Nema 23 57HM56-2006.
1) Первый вариант. Подключаем двигатель к драйверу не используя центральные выводы в обмотках, то есть желтый и белый. Таким способом подключения мы получим высокий момент.
Подключаем двигатель к драйверу не используя центральные выводы в обмотках, то есть желтый и белый. Таким способом подключения мы получим высокий момент.
1) Устанавливаем плату MKS CD 57/86 в штатный разъем ramps 1.4 для шагового драйвера, соблюдая полярность.
2) Подключаем драйвер шагового двигателя TB6600 к плате MKS CD 57/86 кабелем с разъемом PH-4 и PH-4.
3) Подключаем шаговый двигатель NEMA 23 57HM56-2006 к драйверу ШД TB6600. Зеленый провод в разъём 1A, черный в разъём 1B, красный в разъём 2A, синий в разъём 2B. Желтый и белый провода лучше заизолировать, чтоб лишний раз с бубном не прыгать.
4) Подключаем питание от 8-45 В к драйверу шагового двигателя TB6600.
Предыдущие четыре шага на фото ниже.
Подключаем LSD дисплей и питание к ramps 1.4.
Запускаем двигатель и радуемся результату.
2) Второй вариант.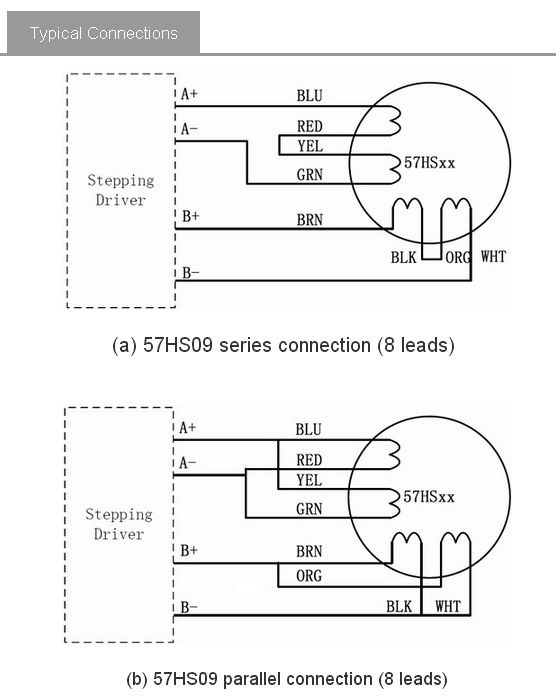 Подключаем двигатель к драйверу не используя крайние выводы в обмотках, то есть черный и синий. Таким способом подключения мы получим высокую приемистость.
Подключаем двигатель к драйверу не используя крайние выводы в обмотках, то есть черный и синий. Таким способом подключения мы получим высокую приемистость.
1) Устанавливаем плату MKS CD 57/86 в штатный разъем ramps 1.4 для шагового драйвера, соблюдая полярность.
2) Подключаем драйвер шагового двигателя TB6600 к плате MKS CD 57/86 кабелем с разъемом PH-4 и PH-4.
3) Подключаем шаговый двигатель NEMA 23 57HM56-2006 к драйверу ШД TB6600. Зеленый провод в разъём 1A, желтый в разъём 1B, белый в разъём 2A, красный в разъём 2B. Черный и синий провода лучше заизолировать, не ну если Вам нравится прыгать с бубном то не делайте этого.
4) Подключаем питание от 8-45 В к драйверу шагового двигателя TB6600.
Предыдущие четыре шага на фото ниже.
Подключаем LSD дисплей и питание к ramps 1.4.
Таким образом, подключить униполярный шаговый двигатель к ramps 1.4 не так уж и сложно, достаточно немного знать теории и быть внимательным. Надеюсь, что теперь Вам помощь бубна в этой теме не потребуется.
Ссылки на компоненты из статьи:
1. Шаговый двигатель nema 23 57HM56-2006
2. Драйвер шагового двигателя TB6600;
3. Шилд (надстройка) RAMPS 1.4;
4. Плата управления arduino mega 2560;
5. Плата МКС CD 57/86 для внешнего драйвера;
6. LCD Display 2004 RAMPS 1.4.
С уважением, Zona-3D.ru
Шаговый двигатель для ЧПУ | Техника и человек
Шаговые электродвигатели можно встретить в устройстве автомобильных приборных панелей, принтеров, приводов CD-дисков, электрических инструментов, в общем – везде, где необходима повышенная точность позиционирования.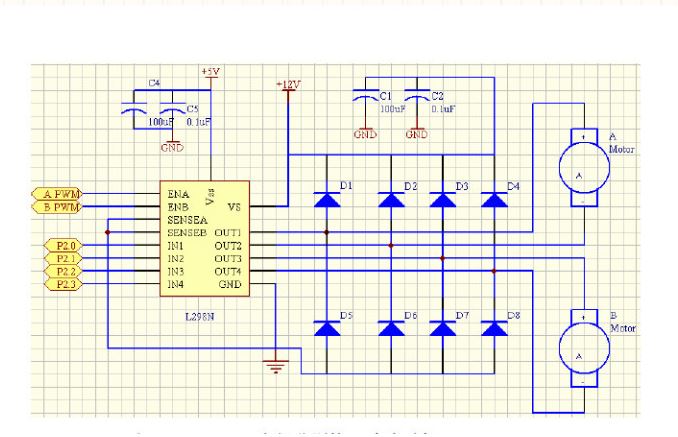 Но наибольшую известность ШД получил в станках с ЧПУ.
Но наибольшую известность ШД получил в станках с ЧПУ.
Но почему этот механизм именуется именно так – «шаговый двигатель»? Если описывать его в двух словах, то он представляет собой бесщеточный синхронный мотор с несколькими проволочными обмотками. Электрический ток подается в одну из обмоток статора (неподвижного элемента) и таким образом фиксирует ротор (подвижную часть) в определенной позиции. Затем ток поступает в другую обмотку и ротор совершает новое движение. Такая последовательная смена позиции именуется «шаг». И именно благодаря этому принципу работы Шаговый Электродвигатель получил свое название.
Устройство и виды ШД
На сегодняшний день различают три основных типа шаговых двигателей:
- С переменным магнитным сопротивлением. Устройство таких моторов предполагает наличие нескольких полюсов на статичном элементе. Ротор в данном виде ШД обладает зубчатой формой и создается он из не жесткого материала, к тому же при этом сам не является намагниченным.
 Если мы в качестве примера рассмотрим мотор с переме
Если мы в качестве примера рассмотрим мотор с переме
нным сопротивлением, в котором статор будет шести-полюсным, а конструкция ротора состоит из четырех зубцов, то количество независимых обмоток в таком двигателе составит 3 штуки. Каждая из них наматывается на два противоположных статорных полюса. Размер одного шага такого мотора составит 30 градусов. - ШД с постоянными магнитами. Как мы можем заключить из названия, в роторе такого двигателя обязательно применяются постоянные магниты. Полюсы располагаются параллельно моторной оси и обладают прямолинейной формой. Намагниченность ротора позволяет обеспечить более мощный магнитный поток. По этой причине, крутящий момент будет на порядок выше, чем в ШД с переменным сопротивлением. Обычно величина шага двигателя с постоянными магнитами варьируется в диапазоне 7,5-15 градусов. А количество шагов на один оборот, в зависимости от модели, может составлять 24-48.
- Шаговые двигатели гибридного типа.
 При изобретении таких моторов делался упор на то, чтобы максимально эффективно сочетать в одном устройстве достоинства двух описанных выше видов ШД. Зубцы в роторе гибридного двигателя установлены в осевом направлении. Это позволяет обеспечить более высокую скорость, сократить величину шага и увеличить крутящий момент. В большинстве гибридных ШД число шагов за один оборот составляет от 100 до 400. При этом, угол одного шага – всего 0,9-3,6 градусов. Для снижения скачкообразности движения ротора используется особый режим микрошагов. Самый распространенный представитель данного вида — это биполярный шаговый двигатель nema.
При изобретении таких моторов делался упор на то, чтобы максимально эффективно сочетать в одном устройстве достоинства двух описанных выше видов ШД. Зубцы в роторе гибридного двигателя установлены в осевом направлении. Это позволяет обеспечить более высокую скорость, сократить величину шага и увеличить крутящий момент. В большинстве гибридных ШД число шагов за один оборот составляет от 100 до 400. При этом, угол одного шага – всего 0,9-3,6 градусов. Для снижения скачкообразности движения ротора используется особый режим микрошагов. Самый распространенный представитель данного вида — это биполярный шаговый двигатель nema.
Следует отметить, что микрошаг возможен только в гибридных ШД. Каждый микрошаг осуществляется посредством независимого управления обмотками. При помощи управления соотношением токов ротор может фиксироваться даже на промежуточном участке между двумя соседствующими шагами. Это повышает плавность вращения подвижного элемента и позволяет добиться оптимальной точности позиционирования. Количество шагов в этом режиме может достигать даже 51 200 за один оборот.
Количество шагов в этом режиме может достигать даже 51 200 за один оборот.
Многие любители задаются вопросом: почему выбрана именно зубчатая форма ротора? Ответ прост: в целях получения периодической зависимости обмотки статора от углового положения ротора. Зазор между пазами делается намного большим, чем между зубцами. Это позволяет обеспечить более низкую магнитную проводимость зазоров относительно удельной проводимости зубцов. В противном случае, шаговый двигатель просто не смог бы функционировать. Очевидно, что именно совокупность всех его конструктивных особенностей, а также форм и состава элементов позволяют ШД быть полноценным механизмом, а не просто куском металла.
Кроме того, в зависимости от типа обмоток, ШД подразделяют на:
- биполярные. Они обладают по одной обмотке для каждой фазы. Изменение направления магнитного поля в них обеспечивается посредством переплюсовки драйвером – двухполярным полумостовым или мостовым;
- униполярные.
 Такой шаговый двигатель также обладает по одной обмотке в каждой из фаз, но при этом от середины любой отдельной обмотки делается отвод. Таким образом направление поля можно менять посредством переключения используемой половинки обмотки. Драйвер должен содержать лишь четыре ключа, так что он проще, чем в биполярном моторе.
Такой шаговый двигатель также обладает по одной обмотке в каждой из фаз, но при этом от середины любой отдельной обмотки делается отвод. Таким образом направление поля можно менять посредством переключения используемой половинки обмотки. Драйвер должен содержать лишь четыре ключа, так что он проще, чем в биполярном моторе.
Характеристики ШД
В технической документации к шаговым двигателям вы можете встретить такой перечень характеристик:
- Крутящий момент или момент вращения. Измеряется в килограмм-сила-сантиметрах. Часто к этому пункту прилагается график, в котором выражается зависимость вращательного момента от частоты вращения. Чем выше этот показатель, тем быстрее мотор набирает обороты при включении.
- Удерживающий момент. Он показывает, с какой силой статор может блокировать ротор, когда двигатель включен, но не запущен. То есть это параметр крутящего момента при нулевой скорости. По графику он снижается прямо пропорционально повышению скорости вращения.
Измеряется данный показатель в унциях-на-дюйм. Удерживающий момент в мере, указанной производителем, мотор может продемонстрировать лишь в статическом режиме, при условии, что полный ток подается сразу в две фазы.
- Тормозящий момент. Это величина силы, удерживающей ротор от вращения в условиях отсутствия подачи тока. То есть, сила фиксации ротора при выключении. Также его именуют стопорный момент. В гибридных ШД он составляет не более десятой части от величины силы, удерживающей ротор от проворачивания при полной подаче тока. Данная характеристика измеряется в тех же единицах, что и удерживающий момент.
- Номинальное напряжение. Этот показатель напрямую зависит от индуктивности обмоток и позволяет определить оптимальное напряжение, которое следует подавать в двигатель. Лучшее напряжение, подходящее для вашего ШД находится в диапазоне от 4 до 25 значений от номинального. Если вы превысите силу подаваемого тока, то мотор будет перегреваться, что приведет к его поломке.
А если напряжения будет недостаточно, то он просто не запустится. Эта характеристика указывается в Вольтах. Для вычисления оптимальной силы тока используется специальная формула U = 32 x√ L, где L– это индуктивность обмотки, а U – искомое значение.
- Отдельно указывается результат проведения диэлектрических испытаний, в ходе которых было определено максимальное напряжение, которое способна выдержать обмотка в течение определенного отрезка времени. Этим показателем определяется прочность двигателя, то, насколько успешно он может сопротивляться перегрузкам.
- Момент инерции подвижной части мотора. Определяет скорость разгона ШД. Данная величина измеряется в грамм-квадратных сантиметрах.
- Количество шагов за один оборот (учитываются только полные шаги, половинчатые значения не берутся во внимание). Чем больше шагов, тем мощнее и быстрее двигатель.
- Длина и масса. Имеется в виду именно длина корпуса, без учета вала.
 А вот в параметре «вес» указывается общая масса изделия. От габаритов и массы зависит, в каких условиях может использоваться двигатель. В одних случаях нужен компактный мотор, а в других подойдет только более крупный и мощный.
А вот в параметре «вес» указывается общая масса изделия. От габаритов и массы зависит, в каких условиях может использоваться двигатель. В одних случаях нужен компактный мотор, а в других подойдет только более крупный и мощный.
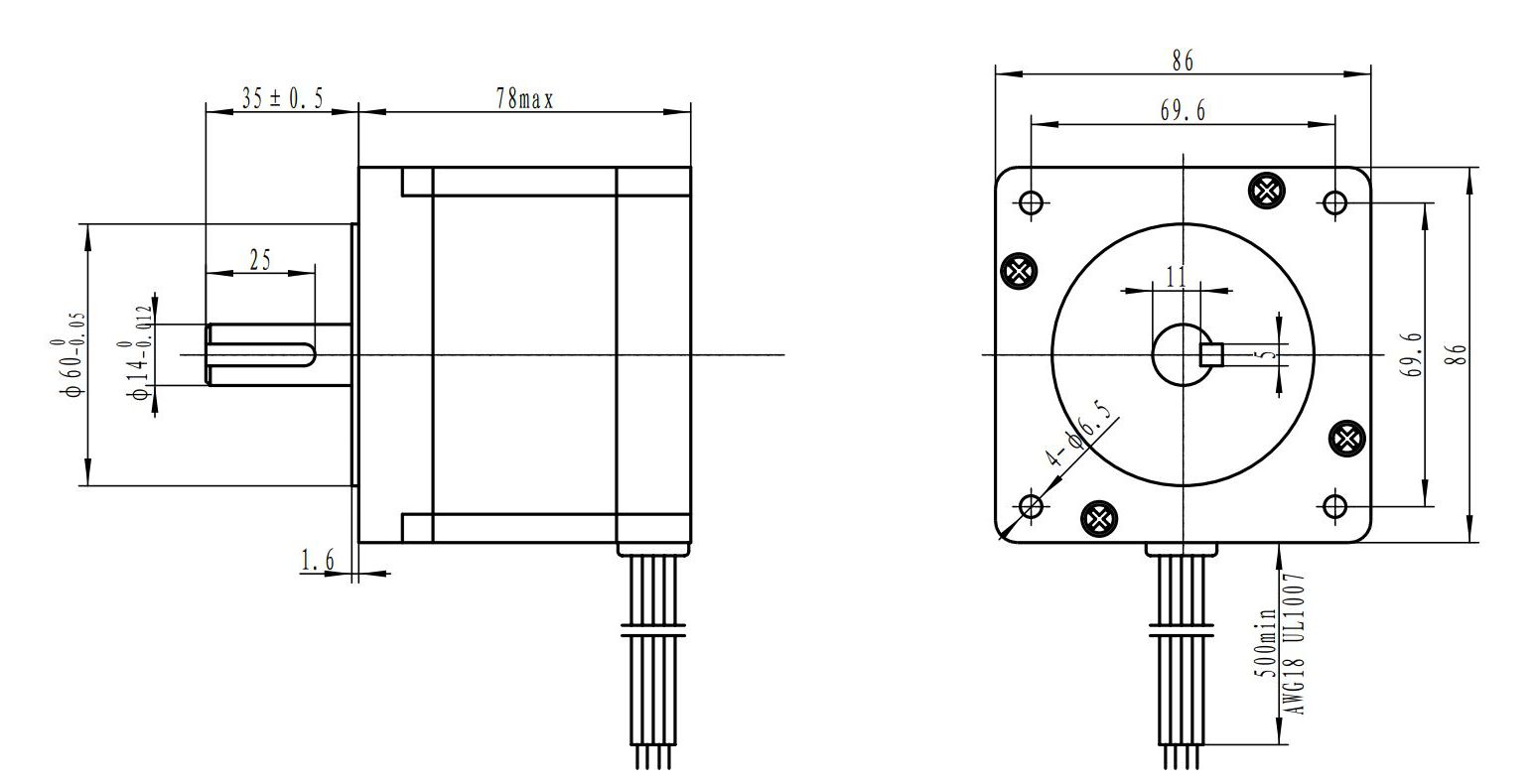
Рассмотрим на примере шаговый двигатель nema. Двигатель PL57h51, что обозначает ширину-высоту (диаметр) по квадратному фланцу 57мм — PL57. Длина двигателя, без вала 41мм — h51. Крутящий, удерживающий и другие моменты двигателя больше зависят от диаметра, чем от длины двигателя.
Характеристики PL57h210
| PL57h210 | L, мм | 131 | Индуктивность фазы, мГн | 6.0±20% |
| Угловой шаг, ° | 1.8±5% | Сопротивление фазы, Ом | 1.0±10% | |
| Число фаз | 2 | Момент удержания,кгхсм | 28 | |
| Сопротивление изоляции, МОм | 100 | Момент инерции,г х см 2 | 405 | |
| Температура окруж. среды, °С | -20~40 | Масса, кг | 1.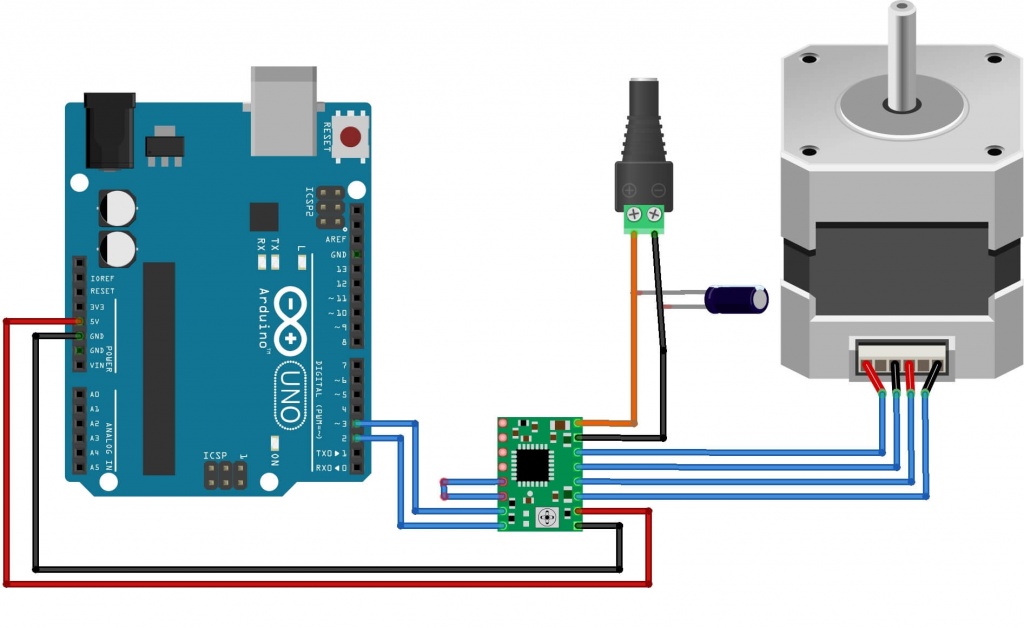 7 7 | |
| Рабочая температура, °С | 110 max | Количество валов | 1 | |
| Ток фазы,А | 4 | Тип | ||
| Радиальное биение вала двигателя (нагрузка 450г.) | Размер шпоночного паза, мм |
Характеристики PL86h213
| PL86h213 | L1 ±1, мм | 113 | Сопротивление фазы, Ом | 1.0±10% |
| L2±1, мм | 35 | Момент удержания, кг х см | 1″ | |
| L3 , мм | 148 | 2 | 2700 | |
| Угловой шаг, ° | 1.8±5% | Количество валов | 1 | |
| Число фаз | 2 | Масса, кг | 3.5 | |
| Сопротивление изоляции, МОм | 100 | Радиальное биение вала двигателя (нагрузка 450г.) | ||
| Температура окруж. среды, °С | -20-40 | |||
| Рабочая температура, °С | 110 max | Индуктивность фазы, мГн | 6.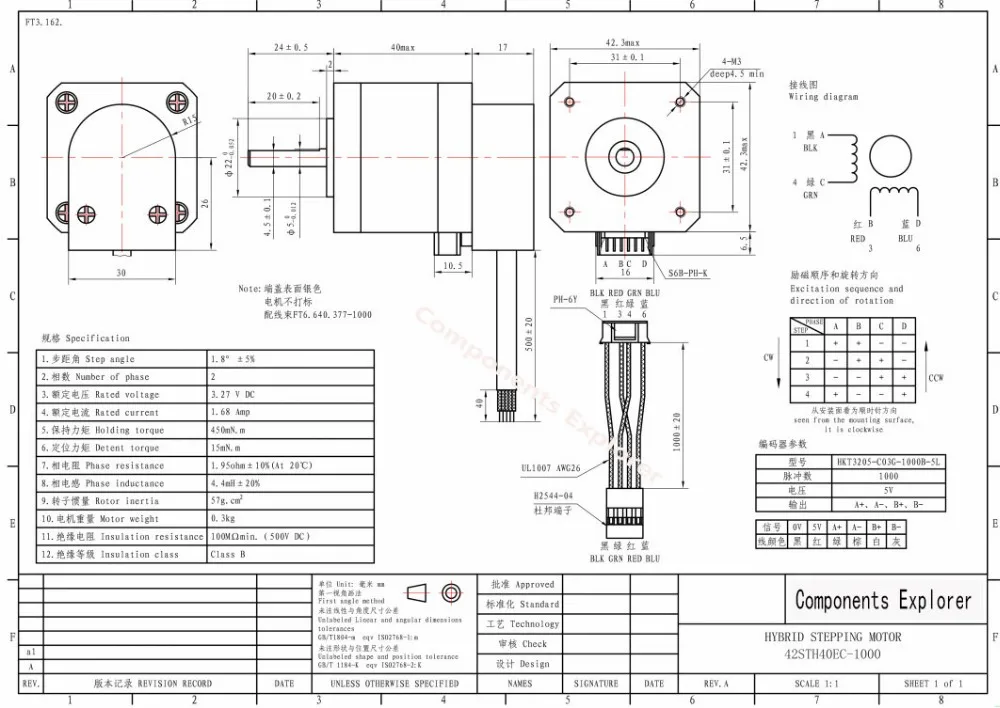 3±20% 3±20% | |
| Ток фазы, А | 4.2 |
Подключение, драйверы и инкодеры
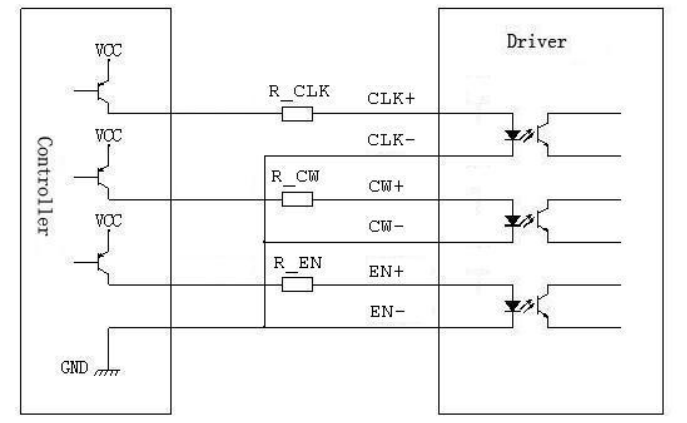
Как правило, управление шаговыми моторами осуществляется посредством специальных драйверов, подключаемых к LTP-порту компьютера. Драйвер принимает генерируемые программой сигналы и трансформируют их в команды двигателю, передаваемые посредством подачи тока на обмотки. Программное обеспечение может регулировать траекторию, величину, скорость и величину движения.
Драйвер является блоком управления шаговым двигателем. В станках ЧПУ управляющие сигналы формируются на ЧПУ контроллерах, поэтому к драйверу подключают 4 вывода шагового двигателя, управляющие провода с контроллера ЧПУ (обычно 4 провода) и питание + и — с блока питания. Сигналы с контроллера поступают в драйвер, где уже они управляют переключением ключей силовой схемы питающего напряжения, идущего с блока питания, через эти ключи на двигатель.
Подбирать драйвер следует по максимальному выдаваемому току нужного напряжения на выводы, для обмоток двигателя.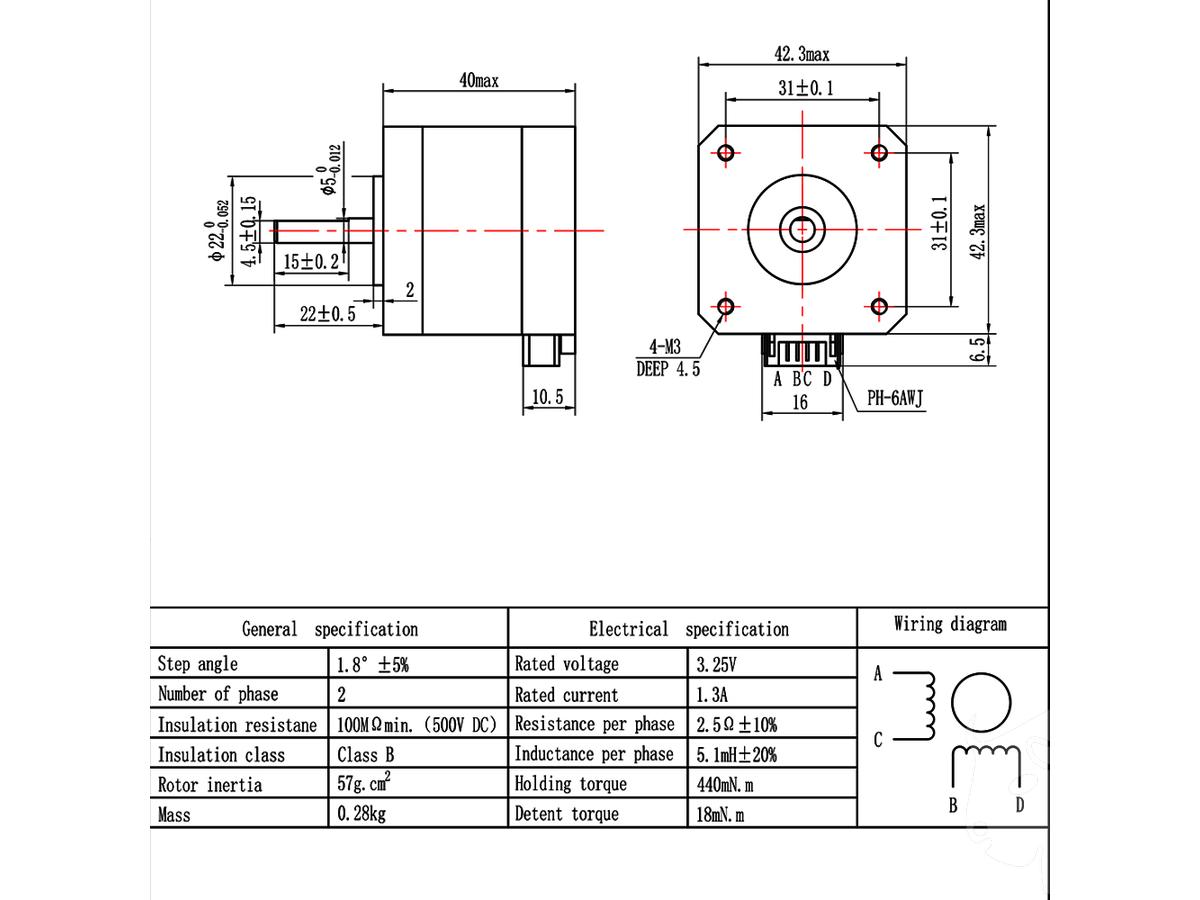 Ток выдаваемый драйвером должен быть, либо таким же, какой будет потреблять двигатель, либо выше. На драйвере есть переключатели, с помощью которых можно выставить желаемые параметры выходного напряжения и не сжечь двигатель.
Ток выдаваемый драйвером должен быть, либо таким же, какой будет потреблять двигатель, либо выше. На драйвере есть переключатели, с помощью которых можно выставить желаемые параметры выходного напряжения и не сжечь двигатель.
Порядок подключения шагового двигателя к общей цепи зависит от того, сколько проводов в вашем приводе и как именно вы хотите использовать ШД. Моделей существует очень много и ля каждой из них существует своя схема подключения. Количество проводов в двигателе может варьироваться в диапазоне от четырех до шести. Четырехпроводные моторы используются исключительно с биполярными механизмами.
Каждым двум обмоткам соответствует два провода. Чтобы определить необходимые пары и связь между ними, вам пригодится метр. Самыми мощными считаются шести-проводные двигатели. В них для каждой отдельной обмотки предусмотрен центр-кран и два провода. Такой ШД можно подключать и к биполярным, и к униполярным аппаратам. Вам понадобится специальный измерительный прибор, чтобы разделить провода. Для однополярных устройств используйте все шесть проводов. Для биполярных достаточно одного центрального крана и провода для одной обмотки.
Для однополярных устройств используйте все шесть проводов. Для биполярных достаточно одного центрального крана и провода для одной обмотки.
Центр-кран это обыкновенный провод, который еще называют «средним» или «центральным». Он есть в некоторых видах шаговых двигателей. В униполярных двигателях для каждой обмотки предусмотрено три провода. Два из них предназначены для подключения к транзисторам. А средний, то есть центр-кран, необходимо подключать к источнику напряжения. То есть, если вам не нужно подключать транзисторы, вы можете просто проигнорировать два боковых провода.
Пяти-проводные ШД схожи с шести-проводными, однако в них центральные провода выведены в один общий кабель, вместе с остальными. Без разрывов вам не удастся разделить между собой обмотки. Лучше всего обнаружить средний провод и соединить его с другими проводниками – это будет эффективным и самым не опасным вариантом.
Часто с ШД используются и энкодеры. Они являются просто датчиками, задача которых заключается в подаче сигналов программному обеспечению. Многие специалисты считают, что в большинстве случаев сочетать шаговый двигатель с энкодерами не имеет смысла и является неэффективной тратой денег. Но если имеет место быть нелинейная зависимость движения от количества шагов, когда необходимо построить пятую координату, энкодер будет незаменим. Он поможет с большей легкостью отслеживать углы поворота стола, что сэкономит время, избавив от необходимости применять более сложные методы.
Многие специалисты считают, что в большинстве случаев сочетать шаговый двигатель с энкодерами не имеет смысла и является неэффективной тратой денег. Но если имеет место быть нелинейная зависимость движения от количества шагов, когда необходимо построить пятую координату, энкодер будет незаменим. Он поможет с большей легкостью отслеживать углы поворота стола, что сэкономит время, избавив от необходимости применять более сложные методы.
Сферы применения, плюсы и минусы
Особое распространение ШД получили в высокотехнологической и тяжелой промышленности. Благодаря тому, что они являются весьма недорогостоящими, а устроены они довольно просто, спрос на них не угасает даже в 21-м веке. Часто вы можете обнаружить их в станках ЧПУ, роботизированной технике, на устройствах автоматизации (подача, дозировка, механизмы автоматической сварки и сборки и так далее).
Особо популярны шаговые двигатели в конструкциях координаторных столов и станков ЧПУ. Благодаря низкой стоимости программного обеспечения, необходимого для их функционирования, ШД являются незаменимыми в производственном секторе, в панелях управления, программирования и постановки задач и в других элементах механизмов.
Шаговые двигатели часто используются периферийных элементах ЭВМ, печатных станках и приборах, фрезерных станках и чертежных автоматах, системах контроля и управления, перфораторах, считывателях лент.
С ШД по популярности конкурируют серводвигатели, которые могут выполнять аналогичные функции в тех же условиях, что и шаговые моторы.
Достоинства шаговых двигателей в сравнении с серводвигателями:
- Исправно функционируют при большом диапазоне нагрузок.
- Фиксированный угол поворота, стандартизированные размеры мотора.
- Невысокая стоимость.
- Простота установки и применения, надежность, долговечность.
- При слишком высоких оборотах двигатель не сгорает, а пропускает шаги.
Основные недостатки ШД по сравнению с серводвигателями:
- Низкий КПД. Высокое потребление энергии вне зависимости от нагрузки.
- Резкое снижение крутящего момента при увеличении частоты оборотов.
- При таких размерах и массе мощность ниже ожидаемой.

- В процессе работы мотор сильно нагревается.
- Высокий уровень шума на высокой и средней частотах.
Как подключить шаговые двигатели
Контроллер Buildbotics с ЧПУ обеспечивает четыре биполярных драйвера шаговых двигателей. Он не может управлять униполярными шаговыми двигателями. К счастью, большинство шаговых двигателей можно подключить как биполярные.
Для подключения шагового двигателя к контроллеру Buildbotics с ЧПУ необходимо правильно подключить четыре провода от драйвера к правым проводам на двигателе. К сожалению, шаговые двигатели бывают самых разных конфигураций, и не всегда сразу понятно, как их подключить.Шаговые двигатели отличаются друг от друга по нескольким характеристикам. Одно большое отличие – это количество проводов, идущих от двигателя. Нередко встречаются двигатели с 4, 5, 6 или 8 проводами, выходящими из двигателя. В этой статье обсуждается каждая из этих конфигураций.
Контроллер ЧПУ Buildbotics обеспечивает четыре выхода драйверов двигателей через заднюю панель на портах, обозначенных X, Y, Z и A. Все четыре этих порта имеют одинаковую проводку и выглядят следующим образом:
Все четыре этих порта имеют одинаковую проводку и выглядят следующим образом:
Каждый выход имеет четыре контакта.Верхний левый штифт – B +, нижний левый – B-, верхний правый – A-, а нижний правый – A +. B- и B + должны управлять одной из катушек двигателя, а A- и A + должны управлять другой катушкой двигателя.
Buildbotics предоставляет готовые кабели, которые подключаются к выходам драйверов на одном конце. Эти кабели имеют цветовую кодировку: провод A + красный, провод A- черный, провод B + желтый, а провод B- фиолетовый.
Подключение 4-проводных двигателей
Для подключения 4-проводных шаговых двигателей необходимо подключить A + и A- к одной из катушек двигателя, а B + и B- – к другой катушке двигателя.
Хитрость заключается в том, чтобы выяснить, какие провода составляют пары катушек. Вот три способа выяснить это:
- Найдите документацию на двигатель. Предполагая, что у вас его еще нет, прочтите номер модели двигателя, а затем поищите его в Интернете.
 Приложив немного усилий, обычно можно получить техническое описание двигателя. В таблице данных обычно указываются провода A +, A-, B + и B- или, по крайней мере, указывается, какие провода по цвету прикреплены к каким катушкам.
Приложив немного усилий, обычно можно получить техническое описание двигателя. В таблице данных обычно указываются провода A +, A-, B + и B- или, по крайней мере, указывается, какие провода по цвету прикреплены к каким катушкам. - Если вы не можете найти техническое описание, но у вас есть омметр, измерьте сопротивление между любыми двумя проводами двигателя.Если вы измеряете почти короткое замыкание, то эта пара составляет одну катушку, а два других провода – вторую катушку. Если это разрыв, измерьте расстояние между первым проводом и другим проводом, а затем до четвертого провода, пока не найдете почти короткое замыкание. Обратите внимание, что я говорю «почти короткий», потому что катушка представляет собой длинный тонкий провод и имеет некоторое сопротивление. После того, как пары идентифицированы, произвольно назначьте одну пару как «A», а другую как «B» и произвольно назначьте один провод как «+», а другой как «-» в каждой паре.Затем подключите провода, как показано. При таком подключении существует вероятность 50%, что двигатель повернет назад.
 Если он повернется не в ту сторону, просто поменяйте местами одну (а не обе) пары, и двигатель повернет в обратном направлении.
Если он повернется не в ту сторону, просто поменяйте местами одну (а не обе) пары, и двигатель повернет в обратном направлении. - Если у вас нет омметра, большинство людей может определить пары наощупь. Валы шаговых двигателей довольно легко поворачиваются, когда катушки двигателя разомкнуты, но их труднее повернуть, когда катушка закорочена. Во-первых, оставьте все четыре катушки двигателя открытыми и поверните вал двигателя, чтобы почувствовать, насколько тяжело его вращать.Затем скрутите два любых провода вместе. Если двигатель вращать значительно труднее, значит, вы замкнули одну из катушек и определили пару. Если нет, отсоедините два провода друг от друга и подключите третий провод к первому. Если мотор не становится труднее вращаться, отсоедините третий провод от первого и подключите четвертый провод. Одну из комбинаций должно быть труднее повернуть, и это одна катушка, а два провода составляют другую катушку. После того, как пары идентифицированы, произвольно назначьте одну пару как «A», а другую как «B» и произвольно назначьте один провод как «+», а другой как «-» в каждой паре.
 Затем подключите провода, как показано. При таком подключении существует вероятность 50%, что двигатель повернет назад. Если он повернется не в ту сторону, просто поменяйте местами одну (а не обе) пары, и двигатель повернет в обратном направлении.
Затем подключите провода, как показано. При таком подключении существует вероятность 50%, что двигатель повернет назад. Если он повернется не в ту сторону, просто поменяйте местами одну (а не обе) пары, и двигатель повернет в обратном направлении.
Подключение 5-проводных двигателей
5-проводные двигатели являются строго однополярными двигателями и не могут быть подключены как биполярные двигатели. Таким образом, они несовместимы с контроллером ЧПУ Buildbotics.
Подключение 6-проводных двигателей
6-проводные двигатели могут быть сконфигурированы как униполярные или как последовательные биполярные двигатели.Контроллер ЧПУ Buildbotics не поддерживает униполярные двигатели. Здесь показаны биполярные последовательные соединения.
6-проводные двигатели имеют две катушки с отводами и открывают концы катушек и центральный проводник с отводами. Это по три провода на каждую из двух катушек. Центральные отводы не подключены, а концы катушек подключены, как показано. Хитрость заключается в том, чтобы выяснить, какие провода принадлежат каждой катушке и какой из этих проводов является центральным проводником. Вот два метода:
Хитрость заключается в том, чтобы выяснить, какие провода принадлежат каждой катушке и какой из этих проводов является центральным проводником. Вот два метода:
- Найдите документацию на двигатель.Предполагая, что у вас его еще нет, прочтите номер модели двигателя, а затем поищите его в Интернете. Возможно, вам придется позвонить поставщику. Приложив немного усилий, обычно можно получить техническое описание двигателя. В таблице данных обычно указываются провода A +, A-, B + и B- или, по крайней мере, указывается, какие провода по цвету прикреплены к каким катушкам.
- Используйте омметр для определения отдельных катушек. Любые провода, которые кажутся подключенными через несколько Ом, будут частью одной катушки.Провода, которые кажутся открытыми, являются частью различных катушек. Произвольно выберите одну из катушек как «A», а другую как «B». После идентификации катушек измерьте сопротивление между каждым из трех проводов этой катушки. Сопротивление между двумя концами катушки будет примерно в два раза больше сопротивления между любым концом катушки и центральным отводом катушки.
 Когда концы катушки идентифицированы, произвольно выберите один из концов как «+», а другой как «-» для каждой катушки. Затем подключите провода, как показано.При таком подключении существует вероятность 50%, что двигатель повернет назад. Если он повернется не в ту сторону, просто поменяйте местами одну (а не обе) пары, и двигатель повернет в обратном направлении.
Когда концы катушки идентифицированы, произвольно выберите один из концов как «+», а другой как «-» для каждой катушки. Затем подключите провода, как показано.При таком подключении существует вероятность 50%, что двигатель повернет назад. Если он повернется не в ту сторону, просто поменяйте местами одну (а не обе) пары, и двигатель повернет в обратном направлении.
Подключение 8-проводных двигателей
Восьмипроводные двигатели могут быть сконфигурированы как униполярные, биполярные последовательные или биполярные параллельные двигатели. Контроллер ЧПУ Buildbotics не поддерживает униполярные соединения. Перед настройкой 8-проводного двигателя необходимо сначала решить, следует ли настроить двигатель как биполярный последовательный или как биполярный параллельный двигатель.Биполярные двигатели с параллельным подключением обычно обеспечивают более высокую максимальную скорость, но потребляют в два раза больше тока, чем двигатель, подключенный последовательно. Последовательная конфигурация должна использоваться, если ток параллельной конфигурации превышает выходные возможности драйвера. Это особенно актуально для двигателей большего размера. В случае контроллера ЧПУ Buildbotics максимальный ток составляет 6 ампер для любого отдельного порта двигателя.
Это особенно актуально для двигателей большего размера. В случае контроллера ЧПУ Buildbotics максимальный ток составляет 6 ампер для любого отдельного порта двигателя.
На следующей схеме показаны подключения для 8-проводного последовательного биполярного шагового двигателя.
На следующей схеме показаны соединения для 8-проводного параллельно подключенного биполярного шагового двигателя.
Перебрать все возможные комбинации подключений омметром или наощупь нереально. Чтобы подключить его, вам понадобится техническое описание двигателя. Предполагая, что у вас его еще нет, прочтите номер модели двигателя, а затем поищите его в Интернете. Возможно, вам придется связаться с продавцом, чтобы получить техническое описание двигателя. В таблице данных обычно указываются провода A1 +, A1-, A2 +, A2-, B1 +, B1-, B2 + и B2- или что-то в этом роде.Учитывая эту информацию, просто подключите двигатели, как показано на схемах выше.
Основы подключения: униполярный или биполярный
Простой способ изменить характеристики скорости и крутящего момента шагового двигателя – это подключить его к другому типу драйвера или изменить его конфигурацию проводки. Однако это еще не все. Знание плюсов и минусов между «униполярным» и «биполярным» может улучшить или ухудшить производительность вашего шагового двигателя.
Однако это еще не все. Знание плюсов и минусов между «униполярным» и «биполярным» может улучшить или ухудшить производительность вашего шагового двигателя.
Давайте посмотрим на эти две разные кривые скорость-крутящий момент.Эти кривые фактически созданы для одного и того же «базового» двигателя, но с разными драйверами. Обратите внимание, как меняются характеристики скорости и крутящего момента. ПОДСКАЗКА: выберите определенную скорость, затем сравните крутящий момент на этой скорости.
| Шаговый двигатель NEMA 23 с биполярным приводом | Шаговый двигатель NEMA 23 с униполярным драйвером |
| |
Кривая крутящего момента скорости отображает рабочие характеристики шагового двигателя с заданным набором напряжения, тока и типа драйвера и используется для определения того, будет ли двигатель соответствовать требованиям по крутящему моменту и скорости для приложения. На форму кривой крутящего момента влияют электрические характеристики двигателя, такие как ток или индуктивность.
На форму кривой крутящего момента влияют электрические характеристики двигателя, такие как ток или индуктивность.
ОБЗОР: Как создается крутящий момент?
Во-первых, давайте начнем с самого начала и рассмотрим, как создается крутящий момент шагового двигателя. Мы знаем, что крутящий момент пропорционален произведению тока возбуждения и количества витков обмотки (катушки). Чем больше число оборотов, тем выше крутящий момент, но приносится в жертву крутящий момент на высокой скорости, тем самым ограничивая максимальную скорость, на которой шаговый двигатель может эффективно работать.При меньшем количестве оборотов крутящий момент уменьшается на более низких скоростях, но сохраняется на более высоких скоростях.
Давайте посмотрим на формулу крутящего момента.
Вот как ток влияет на кривую крутящего момента шагового двигателя.
Вот как количество витков обмотки влияет на кривую крутящего момента шагового двигателя.
Но… что делать, если вы не можете изменить ток обмотки или количество витков?
Н (количество витков обмотки) и I (ток) обычно указываются и не могут быть изменены, так что еще вы можете сделать, чтобы изменить кривую крутящего момента? Если у вас есть хотя бы 6 проводов от вашего шагового двигателя, ответ – посмотрите на «униполярные» и «биполярные» конфигурации проводки.
Что означает «однополярный» и «биполярный»?
Теперь давайте посмотрим на слова «однополярный» и «биполярный».Что именно означают эти слова?
Термины «униполярный» и «биполярный» произошли от типа драйверов, используемых для управления шаговыми двигателями. Проще говоря, «уни» в униполярном означает «один», а «би» в биполярном означает «два». «Полярность» означает электрическую и магнитную полярность (к сведению: направление тока определяет полярность).
Основное различие между «униполярными» и «биполярными» шаговыми двигателями – это центральный отводной провод, который разделяет полные витки обмотки пополам. Это можно сделать с помощью одного или двух проводов. Если вы удалите центральный кран, соединение станет биполярным. Это можно сделать с помощью одного или двух проводов. Если вы удалите центральный кран, соединение станет биполярным. |
Основное различие между «униполярными» драйверами и «биполярными» драйверами заключается в их способности передавать ток. Способность драйвера посылать ток в одном или обоих направлениях напрямую зависит от количества транзисторов, используемых драйвером. Биполярный драйвер потребует вдвое больше транзисторов, чем униполярный драйвер, чтобы контролировать ток в обоих направлениях.
| СОВЕТ: Уточнение между «биполярным», «биполярным-последовательным», «биполярно-параллельным» и т. Д. |
Сам по себе двигатель не является униполярным или биполярным, но производители могут классифицировать шаговые двигатели как «униполярные» или «биполярные» в зависимости от количества выводных проводов. Следовательно, шестипроводной шаговый двигатель можно классифицировать как «униполярный» двигатель, а четырехпроводной шаговый двигатель можно классифицировать как «биполярный» двигатель. В то время как «униполярный» и «биполярный» – это термины, относящиеся к типу используемого драйвера, «униполярный», «биполярно-последовательный» и «биполярно-параллельный» используются для описания проводки между двигателем и драйвером. Подробнее об этом позже. |
 Однако помните, что «униполярный» двигатель всегда можно преобразовать в «биполярный».
Однако помните, что «униполярный» двигатель всегда можно преобразовать в «биполярный».Переходя от униполярного к биполярному или наоборот, мы фактически изменяем электрические характеристики обмотки внутри двигателя, такие как напряжение, сопротивление и индуктивность, а также характеристики крутящего момента.Производители двигателей часто показывают разные наборы спецификаций для одного и того же двигателя в зависимости от типа подключения. Для обеспечения гибкости предлагаются различные варианты намотки для шаговых двигателей с одинаковым размером корпуса и длиной стека.
Для шаговых двигателей NEMA 23 (2,22 дюйма / 56,4 мм) предлагаются различные обмотки, короткая длина пакета
Как вы можете видеть выше, гибкость соединений возрастает с увеличением количества выводных проводов. Шестипроводной двигатель может быть подключен к однополярной или биполярной серии.Восьмипроводный двигатель может быть подключен к однополярному, биполярному последовательному или биполярно-параллельному соединению.
Шестипроводной двигатель может быть подключен к однополярной или биполярной серии.Восьмипроводный двигатель может быть подключен к однополярному, биполярному последовательному или биполярно-параллельному соединению.
Униполярный драйвер имеет шесть клемм для подключения шести проводов от двигателя, а биполярный драйвер имеет четыре клеммы для подключения четырех, шести или восьми проводов от двигателя.
Хотя подключение четырехпроводного биполярного шагового двигателя к четырехполюсному биполярному драйверу довольно просто, вам действительно нужно знать, что вы делаете, чтобы подключить шести- или восьмипроводные биполярные шаговые двигатели к биполярному драйверу.
Не волнуйтесь. В конце этого поста мы расскажем о схеме подключения шагового двигателя, чтобы упростить задачу.
Q: Могу ли я использовать спецификацию максимального удерживающего момента для определения размера шагового двигателя? |
A: Поскольку максимальный удерживающий момент представляет собой выходной крутящий момент шагового двигателя при нулевой или очень низкой скорости, его не рекомендуется определять для выбора двигателя. |
 Он используется для указания максимального крутящего момента, который может быть создан двигателем с полным номинальным током.
Он используется для указания максимального крутящего момента, который может быть создан двигателем с полным номинальным током.Какие есть все возможные способы подключения?
Есть только один способ подключить шестипроводной униполярный шаговый двигатель к шестиконтактному униполярному приводу, но есть несколько способов подсоединить шаговый двигатель к биполярному приводу в зависимости от количества проводов и желаемой производительности. В то время как униполярные драйверы более рентабельны, биполярные драйверы предлагают большую гибкость и позволяют несколькими способами подключаться к четырех-, шести- и восьмипроводным шаговым двигателям.
Биполярные конфигурации проводки разделены на биполярно-последовательную, биполярно-параллельную и биполярную полукатушки.
- Униполярный (6 или 8 проводов)
- Биполярная серия (4, 6 или 8 проводов)
- Биполярно-параллельный (4 или 8 проводов)
- Биполярная полукатушка (6 или 8 проводов)
На схемах ниже показаны как обмотка двигателя, так и схема транзистора драйвера.
Униполярная и биполярная полукатушка
Для униполярной и биполярной полукатушки мы, по сути, разделяем всю катушку и одновременно используем половину обмотки.Таким образом, мы используем меньше витков обмотки, поэтому двигатель не будет выдавать большой крутящий момент. Поскольку индуктивность остается низкой, крутящий момент может поддерживаться до более высоких скоростей.
Биполярная серия
Для биполярной серии мы используем полную катушку (обмотку). При использовании всей обмотки двигатель будет выдавать больший крутящий момент по сравнению с однополярным. Однако индуктивность также увеличивается на четыре, поэтому крутящий момент быстро падает на более высоких скоростях.
Биполярно-параллельный
Для получения наилучших характеристик скорости и крутящего момента рекомендуется двухполюсное параллельное соединение.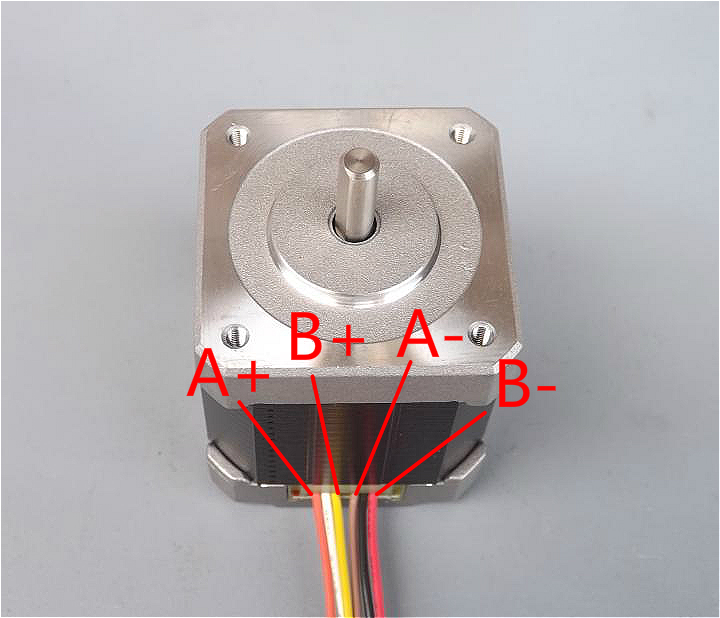 В этой конфигурации проводки также используется полная катушка, поэтому крутящий момент увеличивается примерно на 40% по сравнению с униполярным. Индуктивность также остается низкой, что позволяет поддерживать крутящий момент на более высоких скоростях. Однако мы должны увеличить ток примерно на 40%, чтобы получить эти преимущества.
В этой конфигурации проводки также используется полная катушка, поэтому крутящий момент увеличивается примерно на 40% по сравнению с униполярным. Индуктивность также остается низкой, что позволяет поддерживать крутящий момент на более высоких скоростях. Однако мы должны увеличить ток примерно на 40%, чтобы получить эти преимущества.
Изменения в характеристиках кратко описаны ниже.
| Подключения | Сопротивление | Индуктивность | Текущий | Напряжение | Удерживающий момент |
| (Ом) | (мГн) | (А) | (В) | (унция-дюйм) | |
| Однополярный | НЕТ | НЕТ | НЕТ | НЕТ | НЕТ |
| Биполярная серия | Униполярный X 2 | униполярный X 4 | Униполярный X 0. 707 707 | Униполярный X 1,414 | Униполярный X 1,414 |
| Биполярный Половина катушки | То же, что и униполярный | То же, что и униполярный | То же, что и униполярный | То же, что и униполярный | То же, что и униполярный |
| Биполярный параллельный | Униполярный X 0,5 | То же, что и униполярный | Униполярный X 1,414 | Униполярный X 0,707 | Униполярный X 1.414 |
Биполярно-параллельный режим обеспечивает низкую индуктивность при высоком токе и низком напряжении, что является хорошей комбинацией для наилучшего общего крутящего момента.
Как вы соединяете униполярную и биполярную последовательные, биполярно-параллельные или биполярные полукатушки?
Быстрый ответ – следовать правильным схемам подключения двигателя. Сначала решите, какие конфигурации проводки возможны с вашим шаговым двигателем, а затем найдите правильную схему подключения, которой нужно следовать.
На схемах ниже показаны электрические схемы внутренней обмотки шаговых двигателей с разным количеством выводных проводов. Отслеживая ток, вы можете визуализировать, какая часть обмотки используется. Если есть интерес, прокомментируйте.
| 4 провода | 5 проводов | 6 проводов | 8 проводов |
| СОВЕТ: четырехпроводные шаговые двигатели |
Четырехпроводные шаговые двигатели могут иметь внутреннюю двухполярную последовательную или двухполюсную параллельную обмотку.Производители двигателей иногда не указывают, намотан ли четырехпроводной двигатель на двухполюсную последовательную или двухполюсную параллельную. |
 Однако отрасль движется к биполярному параллельному соединению в качестве стандарта для параллельных соединений из-за его преимуществ в производительности. Еще один фактор – снижение стоимости драйвера.
Однако отрасль движется к биполярному параллельному соединению в качестве стандарта для параллельных соединений из-за его преимуществ в производительности. Еще один фактор – снижение стоимости драйвера.Здесь мы покажем, как управлять конфигурацией проводки из стандартных соединений.
Например, чтобы подключить восьмиполюсный шаговый двигатель к биполярному драйверу с биполярно-параллельной схемой подключения, вы должны соединить эти провода вместе, а затем подключить их к соответствующим клеммам:
- Подключите черный и оранжевый к клемме A
- Подключите желтый / зеленый к клемме A-
- Подключите красный / коричневый к клемме B
- Подключите белый / синий к клемме B-
| СОВЕТ: Большая тройка проводки шагового двигателя |
Для успешной системы шагового двигателя требуются три компонента: |
Какой способ подключения лучше?
Это вопрос с подвохом. Ответ: это действительно зависит от вашего приложения. Тип конфигурации электропроводки обычно включается на этапе определения размеров двигателя на этапе проектирования машины. Эти уловки с подключением также позволяют повторно использовать один и тот же двигатель для различных приложений.
Ответ: это действительно зависит от вашего приложения. Тип конфигурации электропроводки обычно включается на этапе определения размеров двигателя на этапе проектирования машины. Эти уловки с подключением также позволяют повторно использовать один и тот же двигатель для различных приложений.
Например, если вы используете установку униполярного шагового двигателя и хотите увеличить его крутящий момент на низкой скорости для другого приложения, стоит изучить конфигурацию проводки биполярной серии, чтобы сохранить тот же размер двигателя.Для наилучшего сочетания скорости и крутящего момента попробуйте биполярно-параллельный. Однако для этого требуется больше тока от драйвера. Помните, что это также зависит от того, какой у вас тип драйвера и какой ток он может выдавать.
Вот различия в характеристиках двигателя, показанные при наложении каждой индивидуальной кривой скорость-крутящий момент. Легко увидеть, как лучше всего работает биполярно-параллельный (или параллельный биполярный).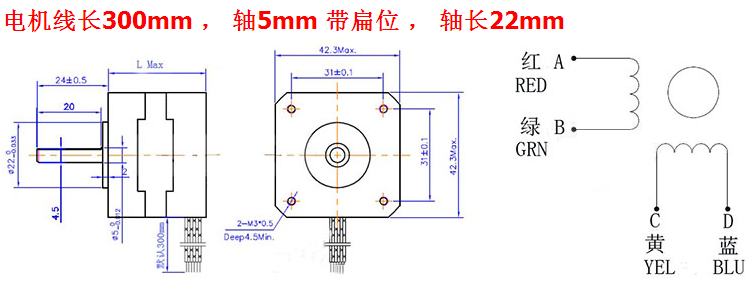
Сводка
Подключив один и тот же шаговый двигатель по-разному, вы можете изменить электрические характеристики его обмотки и, в свою очередь, изменить рабочие характеристики того же двигателя в соответствии с конкретным применением.Однако вам нужно знать, что вы делаете.
Биполярно-параллельные шаговые двигатели становятся все более популярными из-за снижения стоимости компонентов схемы драйвера. Чтобы упростить электромонтаж, двигатели Oriental Motor имеют внутреннюю обмотку, поэтому для подключения требуется всего четыре провода. Для каждого размера корпуса и длины стека предлагается несколько вариантов обмотки, чтобы обеспечить максимальную гибкость интеграции с различными электрическими конструкциями драйверов.
При работе с шаговыми двигателями лучше всего убедиться, что вся команда находится на одной странице с конфигурацией проводки.Вы можете выбрать подходящий двигатель и купить его, но неправильная разводка по крайней мере создаст некоторую путаницу.
Вот памятка по подключению, которая поможет при работе с униполярными и биполярными шаговыми двигателями. Не стесняйтесь делать закладки, если это поможет.
Подпишитесь, если вы хотите получать уведомления о будущих публикациях.
| Learn Products Suppliers Events News | Как можно подключить 4-проводные, 6-проводные и 8-проводные шаговые двигатели?Прежде всего, существуют два драйвера: униполярный и биполярный, униполярные приводы выводят сигнал на 6 выводов шагового двигателя, а биполярный вывод – на 4 вывода шагового двигателя.Таким образом, четырехполюсный двигатель можно подключить только к биполярному приводу. 6- и 8-выводный электродвигатели могут быть подключены либо к униполярному приводу, либо к биполярному приводу. На схеме подключения показаны возможные подключения.При каких температурах могут работать шаговые двигатели?Большинство шаговых двигателей имеют изоляцию класса B.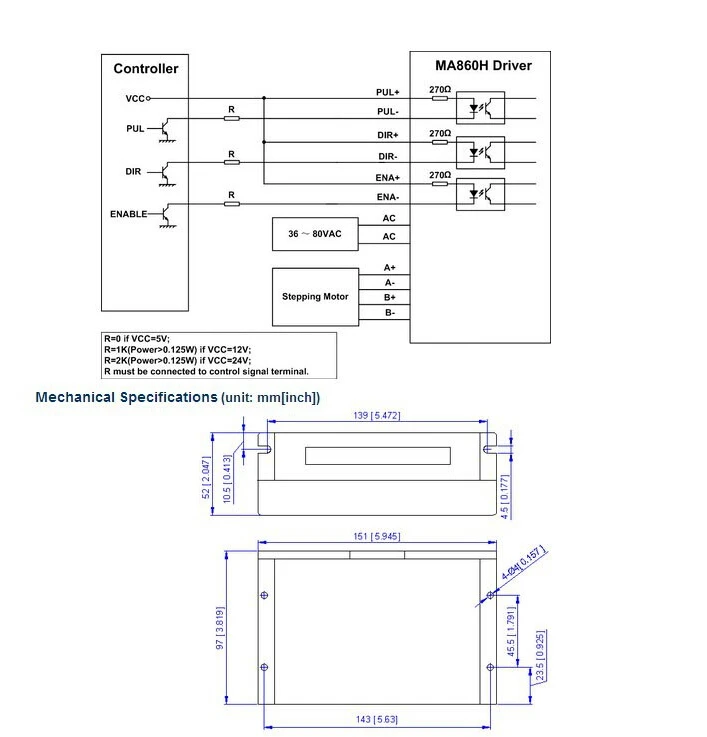 Это позволяет внутренней проводке шагового двигателя выдерживать температуру до 130 градусов Цельсия. При температуре окружающей среды 40 Цельсия шаговый двигатель допускает превышение температуры 90 Цельсия.Шаговые двигатели могут работать непрерывно при этих температурах. Это позволяет внутренней проводке шагового двигателя выдерживать температуру до 130 градусов Цельсия. При температуре окружающей среды 40 Цельсия шаговый двигатель допускает превышение температуры 90 Цельсия.Шаговые двигатели могут работать непрерывно при этих температурах.Для каких приложений можно использовать биполярный шаговый двигатель?Биполярный шаговый двигатель лучше всего использовать в ситуации, когда требуется высокий крутящий момент на низких скоростях.В чем разница между униполярным и биполярным шаговым двигателем?Основное различие между униполярным и биполярным шаговыми двигателями заключается в центральных соединениях отвода. Униполярный двигатель намотан шестью выводами, каждый из которых имеет центральный отвод. Они будут использоваться в приложениях, требующих высокого крутящего момента при высокой скорости.В то время как биполярный шаговый двигатель имеет четыре выводных провода, но не имеет соединений с центральным ответвлением. Биполярные шаговые двигатели используются, когда вам требуется высокий крутящий момент на низких скоростях. Для каких приложений можно использовать униполярный шаговый двигатель?Униполярный шаговый двигатель лучше всего использовать в том случае, если вам потребуется двигатель с высокой скоростью и высоким крутящим моментом.Что такое шаговый двигатель?Шаговый двигатель – это бесщеточный электродвигатель постоянного тока, который делит полный оборот на ряд равных шагов.Двигатель может быть остановлен на любом из этапов без датчика обратной связи, если двигатель точно рассчитан для применения.Когда следует использовать микрошаг? Микрошагиспользуется в приложениях, требующих, чтобы двигатель работал со скоростью менее 700 PPS. При низкой частоте следования импульсов шаговые двигатели становятся менее плавными и часто вибрируют.Что такое униполярный шаговый двигатель?Униполярный шаговый двигатель – это один из двух основных типов двухфазных шаговых двигателей. Униполярный двигатель имеет одну обмотку с центральным отводом на фазу.Обычно центральный отвод делается общим, что дает три вывода на фазу и шесть выводов для типичного двухфазного двигателя.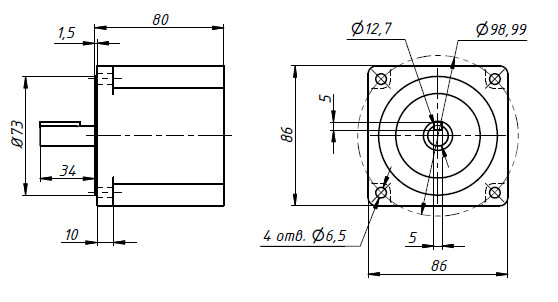 Обычно эти две общие фазы имеют внутреннее соединение, поэтому у двигателя пять выводов. Микроконтроллер или шаговый контроллер можно использовать для управления управляющими транзисторами в правильном порядке, что упрощает работу, делая униполярный шаговый двигатель самым дешевым способом получения точных угловых перемещений. Обычно эти две общие фазы имеют внутреннее соединение, поэтому у двигателя пять выводов. Микроконтроллер или шаговый контроллер можно использовать для управления управляющими транзисторами в правильном порядке, что упрощает работу, делая униполярный шаговый двигатель самым дешевым способом получения точных угловых перемещений.Что такое биполярный шаговый двигатель?Биполярный шаговый двигатель – это тип двухфазного шагового двигателя с одной обмоткой на фазу.Ток в обмотке этого типа двигателя необходимо реверсировать, чтобы перевернуть магнитный полюс, что значительно усложняет управление приводом на биполярных шаговых двигателях.Что такое шаговый двигатель? Шаговые двигатели– это двигатели постоянного тока, которые вращаются отдельными шагами. На каждом шаге двигатель удерживает свое положение без потребности в энергии, тем самым устраняя необходимость в датчиках позиционирования с обратной связью, пока двигатель имеет правильный размер и не пропущены никакие шаги. Устранение требований обратной связи и цифровая природа шагового двигателя упрощает интеграцию в цифровые системы.В чем разница между шаговыми и серводвигателями? Шаговые двигатели– это двигатели с постоянными магнитами, которые «делают шаг» на одно приращение каждый раз, когда компьютер подает управляющей электронике один импульс. Этим двигателям не требуется обратная связь по положению (если они работают в своих пределах). При остановке они автоматически удерживают свою позицию. Серводвигатели – это двигатели постоянного тока с обратной связью энкодера. Компьютер считывает положение двигателя и контролирует мощность, подаваемую на двигатель. Серводвигатели двигаются быстрее от точки к точке и лучше ускоряют тяжелую технику.У них больше мощности на высоких скоростях, чем у шагового двигателя, и они могут вращаться намного быстрее, обычно 3000-6000 об / мин. Шаговый двигатель обладает большой мощностью на низких оборотах, однако он не должен работать со скоростью более 800 об / мин, поскольку крутящий момент быстро падает. Сервосистема знает, где находится станок во время резки, и знает, находится ли двигатель под большой нагрузкой или заклинило ось, и останавливает станок. Шаговая система не имеет обратной связи и не знает, заклинило ли она или потеряла позицию. В этом аспекте сервопривод более надежен.Шаговые двигатели так же точны, как и сервоприводы, и, кроме того, они проще и не требуют обслуживания в суровых и / или пыльных условиях.Что такое резонанс шагового двигателя?Резонанс относится к нестабильному состоянию при работе шагового двигателя. Резонанс часто возникает при 2-4 об / сек, и во многих ситуациях его можно уменьшить, поместив нагрузку на двигатель, переключившись с полного шага на половинный или микрошаговый, и / или увеличив ускорение в зоне резонанса.Что такое контроллер шагового двигателя?Контроллер шагового двигателя, обычно называемый контроллером движения, представляет собой систему, которая управляет вращением двигателей с целью перемещения механического компонента в определенное положение.Контроллеры движения не следует путать с драйверами двигателей, которые являются силовым компонентом системы позиционирования. Лидируют те системы на базе ПК, которые через параллельный порт подают сигналы на двигатели.При каких температурах обычно работают шаговые двигатели?Большинство шаговых двигателей имеют изоляцию класса B. Благодаря этому шаговый двигатель может выдерживать температуру до 130 градусов Цельсия. Следовательно, при температуре окружающей среды 40 градусов Цельсия шаговый двигатель имеет допуск на повышение температуры до 90 градусов Цельсия, что позволяет шаговым двигателям работать при высоких температурах.Можно ли получить больший крутящий момент, запустив шаговый двигатель с удвоенным номинальным током?Можно увеличить крутящий момент, увеличивая ток, но это ослабит способность двигателя работать плавно, а также приведет к повышению температуры двигателя. Пожалуйста, не запускайте шаговый двигатель выше внутренней температуры, соответствующей его классу.Что делают стояночные тормоза на шаговом двигателе?Удерживающие тормоза не замедляют вал двигателя, а удерживают его на месте.Если на тормоз подается 24 В, тормоз «отпускается», и вал двигателя может свободно вращаться. Если на тормоз не подается 24 В, он блокирует положение и удерживает вал двигателя на месте.Какие типоразмеры бывают у шаговых двигателей с высоким крутящим моментом?Размеры нашей рамы NEMA варьируются от 08 до 42 для наших шаговых двигателей с высоким крутящим моментом.От чего защищен герметичный шаговый двигатель со степенью защиты IP65?IP65 – это степень защиты. Цифра 6 говорит нам, что он полностью защищен от пыли. Цифра 5 означает, что он устойчив к струям воды под любым углом.Какие условия окружающей среды идеально подходят для шаговых двигателей со степенью защиты IP65? Шаговые двигателисо степенью защиты IP65 для суровых условий окружающей среды. Эти шаговые двигатели со степенью защиты IP65 отвечают требованиям защиты от брызг для большинства приложений во влажной или влажной среде.Герметизированы ли валы шаговых двигателей со степенью защиты IP65?Да, герметичные валы обеспечивают дополнительную защиту шаговых двигателей, что увеличивает срок их службы.Можете ли вы предоставить нестандартный шаговый двигатель со степенью защиты IP65?Доступны специальные модификации вала, а также сумматоры кабеля, разъема и энкодера.Могут ли шаговые двигатели со степенью защиты IP65 иметь более высокий класс защиты IP?Да, они могут иметь более высокий рейтинг IP. Клиентам рекомендуется позвонить и обсудить требования приложения.Каковы преимущества использования шаговых двигателей?Скорость можно легко определить и контролировать, помня, что скорость равна шагам на оборот, деленным на частоту импульсов.2. Шаговый двигатель может совершать точные пошаговые движения. 3. Шаговый двигатель не требует обратной связи от энкодера (разомкнутый контур). 4. Некумулятивная ошибка позиционирования. 5. Отличные характеристики на низкой скорости / высоком крутящем моменте без редуктора. 6. Удерживающий момент шагового двигателя может использоваться для удержания нагрузки в неподвижном положении без перегрева. 7. Возможность работы в широком диапазоне скоростей. Как быстро я могу запустить шаговый двигатель?Большинство шаговых двигателей рассчитаны на работу на низкой скорости (3000 об / мин или меньше). Когда вы переходите на более высокие скорости, обычно используются серводвигатели.Насколько быстро работают наши шаговые двигатели?Большинство шаговых двигателей рассчитаны на работу на низкой скорости (3000 об / мин или меньше).Когда вы переходите на более высокие скорости, обычно используются серводвигатели.Какие шесть типов шаговых двигателей мы продаем?Шесть различных типов шаговых двигателей, которые мы продаем и продаем: это шаговые двигатели с высоким крутящим моментом (квадратные), стандартные (круглые) шаговые двигатели, шаговые двигатели с постоянным магнитом (PM), шаговые двигатели с уплотнением IP65, шаговые двигатели со встроенными драйверами и Шаговые двигатели со встроенными драйверами и контроллерами.Сколько электрических фаз у шагового двигателя?Количество электрических фаз в шаговом двигателе определяется как количество используемых независимых обмоток.Какие шаговые двигатели совместимы с драйвером шагового двигателя DPD?Драйвер шагового двигателя совместим с шаговыми двигателями с высоким крутящим моментом, например, с нашими популярными 23Y, 34Y, 42Y. Или двигатели со стандартным крутящим моментом (с круглым корпусом): 23W, 34W, 23D, 34D и 42D.В чем разница между 4-проводным и 6-проводным шаговым двигателем?В чем разница между 4-проводным и 6-проводным шаговым двигателем?Сколько существует типов шаговых двигателей?Существует три различных типа шаговых двигателей: с постоянным магнитом, с переменным сопротивлением и гибридным.Почему глохнет шаговый двигатель?В некоторых случаях остановка шагового двигателя вызывает большой скачок напряжения, который часто повреждает фазовые транзисторы на драйвере. Некоторые драйверы предназначены для защиты от подобных ситуаций. В противном случае можно добавить устройства подавления переходных процессов. Проконсультируйтесь с заводом-изготовителем для получения дополнительной информации. |
Схема подключения шагового двигателя
Схема подключения шагового двигателя Двигатель должен совершить один оборот в одном направлении, а затем на один оборот в другом направлении.В идеале вы должны знать напряжение от производителя, но если вы не получите переменный источник питания постоянного тока, примените минимальное напряжение, надеюсь, 3 В или около того, подайте напряжение на два провода катушки e. Мой проект касается наклона панорамирования камеры DSLR и слайдера, так что это будет 3 шаговых двигателя. Прототипирование шагового драйвера. Но 4-проводное соединение не имеет смысла. В двигателе должно быть 2 или 4 полюса, и каждый полюс должен быть подключен к общей земле, поэтому должно быть 5 проводов. Как работает 4-проводный? Я 39 м с использованием MOSFET для управляя шаговым двигателем, а не LMxxx.Поскольку они демонстрируют высокий статический и динамический крутящий момент и работают с очень высокой скоростью шага, гибридные двигатели используются в самых разных промышленных приложениях. Если вы используете два двигателя для робота, вам необходимо убедиться, что полярность двигателей одинакова на обоих выходах, иначе вам нужно поменять их местами, когда вы устанавливаете двигатели на шаговое введение. Узнайте, как подключить 4-проводные шаговые двигатели к контроллеру Buildbotics с ЧПУ. . Эта конфигурация проводки лучше всего подходит для приложений, требующих высокого крутящего момента при относительно низких скоростях.21 августа 2017 г. Описание MotionKing China Motor Industry Co. и arduino tb6600 – это именно то, что вам нужно. 21. Распиновка каждого разъема шагового двигателя такая же, как у другой популярной электроники 3D-принтера. Два. Это биполярный шаговый двигатель, который работает точно так же, как и любой другой биполярный шаговый двигатель. Контроллер шагового двигателя со схемой драйвера. Электрические схемы внешнего шагового драйвера C3d. Скорость вращения шпинделя регулируется напряжением и управляется параллельным интерфейсом в зависимости от напряжения питания.Представьте себе двигатель на радиоуправляемом самолете. 5 декабря 2019 года Я хочу соединить два шаговых двигателя вместе, чтобы один из них запускал вручную генератор переменного тока, который приводит в действие второй шаговый двигатель. Я просто не могу найти схему. 14 марта 2015 года. Но какой должна быть проводка. Если бы в нем было 5 проводов, я бы имел сделал вот так схемы. МАРКИРОВКА КЛЕММ И СХЕМЫ ВНУТРЕННЕЙ ПРОВОДКИ ОДНОФАЗНЫЕ И ПОЛИФАЗНЫЕ ДВИГАТЕЛИ, СООТВЕТСТВУЮЩИЕ СТАНДАРТАМ NEMA См. Рис. 13 июля 2014 г. Что такое двухфазный двигатель и его схема обмоток? Униполярные биполярные соединения шаговых двигателей для двухфазных двухпроводных двигателей, принципиальная схема управления двухфазным шаговым двигателем Моторчик на работе.com MOONS 39, основанная в 1994 году, входит в тройку мировых лидеров по производству шаговых двигателей, ежегодно поставляя более 10 миллионов гибридных шаговых двигателей. Наша универсальная монтажная ступица 5 мм может использоваться для крепления объектов на выходном валу шагового двигателя диаметром 5 мм, а наш алюминиевый кронштейн NEMA 17 предлагает множество вариантов для установки этого шагового двигателя в вашем проекте. Что касается других поставщиков, вы должны связаться с ними по поводу проводки и цвета. 15 июня 2020 г. Электросхема шагового двигателя Источник img.Основы работы контроллера шагового двигателя и шагового драйвера. однополярный. Схемы подключения блока питания лазера в основном будут такими же, как и у обновленного блока питания. Основы шагового двигателя 4-х проводный биполярный двигатель ОСНОВНЫЕ ОСНОВЫ ШАГОВОГО ДВИГАТЕЛЯ Пример четырехпроводного биполярного двигателя. 6500 или более Шаговый двигатель 103H5333 0340 103H5333 0310 103H5332 0340 103H5332 0310 10 сентября 2019 г. Модуль шагового драйвера управляет работой шагового двигателя. 2009 Тома Иго включают lt Stepper. Это шаговый двигатель 5v 28YBJ 48 с редуктором, поэтому он имеет хороший крутящий момент для своего размера, но относительно медленное движение.Конденсаторы J – это электронные устройства, предназначенные для хранения электрического заряда. Для степпера на картинке ниже работает 200 и 1000 соответственно. Что люди ищут в этом блоге Схема подключения двухфазного двигателя Схема подключения двухфазного двигателя Подключение двухфазного однофазного двигателя NEMA 17 Шаговый двигатель NEMA 17 Типоразмер 42. SET Инструкции по подключению 4-позиционного переключателя со схемами подключения. Отличные цены. Вместо того, чтобы получать питание от непрерывного потока тока, как в обычных двигателях постоянного тока, они приводятся в действие импульсами электричества.Соединения также приведены в таблице ниже. Полный список см. На сайте electronicshub. Питание 5А. е. Масса. Жгут проводов цифрового датчика температуры жидкости шагового двигателя с предварительным подключением по принципу «включай и работай» 30 июля 2018 г. Биполярный шаговый двигатель имеет простую схему подключения проводов, но его работа несложна. Источник питания 3A для 3-осевой системы, но процесс такой же для 4-осевой системы, вы будете использовать только больший 12. Чтобы перейти на 4-проводную схему, просто добавьте еще два двигателя. 0 кг см 4-проводной шаговый двигатель NEMA 23.29 августа 2018 12 апреля 2020 Схема подключения для этой модели униполярного 5-проводного шагового двигателя Катушка 1 Синий Розовый провод Катушка 2 Желтый Оранжевый провод Красный Общий центральный отвод Плата драйверов ULN2003A. Для подачи питания на четыре катушки шагового двигателя мы используем цифровые выводы 8, 9, 10 и 11. Двигатель имеет шесть проводов, соединенных с двумя разделенными обмотками, что является обычным для униполярных шаговых двигателей. Вы можете найти этот или аналогичные двигатели в своих DVD-приводах, камерах движения и многих других местах. Конец игры 0.17 октября 2018 г. Управление биполярным шаговым двигателем Arduino Управление шаговым двигателем с помощью Arduino и джойстика. 25 января 2013 г. У меня 39 м возникли проблемы с поиском схемы подключения 8-проводных шаговых двигателей Slo Syn. Если источник питания отключен, конденсатор останется заряженным. Электромонтаж двигателей. Типичное четырехпроводное соединение двигателя показано на рисунке 8. Загрузки Wire Stepper Wire Stepper Motor for generator Wire Stopper Bottle wire nbsp 4 часа назад Прочтите или загрузите проволочный шаговый двигатель БЕСПЛАТНО на странице PROCESSFLOWDIAGRAM.Подключите красный провод сервопривода к 5V на Arduino. Вал или шпиндель шагового двигатель вращается с шагом дискретного шага, когда электрический ПРОФЕССИОНАЛЬНОГО шагового двигатель АНАЛОГ датчик температуры 2650 1289 00 ДАТЧИК 1 8 NPT хорошего двигателем земли Grommet 12v ПОДКЛЮЧЕНИЕ КРАСНОГО ЧЕРНЫЙ сила вверх указатель будет двигаться назад к стопорному штифту, а затем дисплей фактическая температура. BrickRap использует пятипроводные двигатели 28BJY 48 с приводом от двигателя Pololu. Так как я решил двигать стрелки в противоположных направлениях, шаг часовая стрелка потребовала реверсирования предыдущей последовательности активации катушки с помощью штифтов 5 8, используйте достаточное количество шагов для перемещения стрелки от часа к часу.Гибридный шаговый двигатель D eet H es 1 5 A JB Считается, что спецификации точны и надежны. PatrickDunne 8 июля 2016 г. 7 43pm Nema 23 – шаговый двигатель с 2-м двигателем. 17 февраля 2020 г. Низкий КПД В отличие от двигателей постоянного тока потребление тока шаговым двигателем не зависит от нагрузки. см Мин N. Подробную информацию об обмотке и схеме подключения шагового двигателя можно найти здесь 15 марта 2020 г. Шаговый двигатель может работать во многих режимах, таких как полный шаговый режим или полушаговый. Пожалуйста, обратитесь к статье о шаговом двигателе, чтобы узнать последовательность шагов.Чтобы подключить шаговые двигатели к внутренним драйверам, см. Электрическую схему Duet 3, электрическую схему Duet 2 WiFi Ethernet или электрическую схему Duet 2 Maestro. Однако, если вы используете 4-проводный или 6-проводный шаговый двигатель, все еще можно определить пары проводов катушки без таблицы данных. Символы электродвигателей Электродвигатели – это электромеханические устройства, функция которых заключается в преобразовании электрической энергии в механическую посредством электромагнитных взаимодействий. Уловка, однако, заключается в том, что существует несколько способов подключения двигателя как биполярного, и все зависит от того, чего вы хотите достичь.При подключении к источнику питания конденсатор заряжается до своей номинальной емкости. Название 23HS45 4204S Полное техническое описание Nema 23 Шаговый двигатель биполярный 3 Нм 425 унций. Модуль драйвера питается от 4, 5, 6 и 8-проводных шаговых двигателей 39 Help 39. соединения проводки соединения проводки Шаговые двигатели Lin Engineering доступны с любой из двух катушек. Получите наш 30-страничный глоссарий по шаговым двигателям, когда вы присоединитесь к нашему руководству по подключению шаговых двигателей. 42bots руководство по подключению шаговых двигателей это биполярный шаговый двигатель. Биполярные шаговые двигатели имеют две катушки, так как катушки a и b На приведенной выше схеме не показаны электрические схемы шагового привода Apollo.Электросхема Дата 21 октября 2020 года. Или вы студент, или, может быть, даже вы, кто просто хотел бы узнать о принципиальной схеме шагового двигателя. Схема подключения шагового двигателя в ассортименте. Обратите внимание, что G201X G210X G214 и GM215 имеют встроенные DIP-переключатели для настройки тока, и резистор для настройки тока не требуется. Биполярный шаговый двигатель обычно имеет. Инерция. 10 января 2019 г. 6-проводной шаговый двигатель аналогичен 4-проводной конфигурации с дополнительной функцией общего отвода, размещенного между концом каждой фазы, как показано на рисунке 2.6 часов назад Прочтите или загрузите проволочный шаговый двигатель БЕСПЛАТНО на NEOWIRINGS. amp 41 Вам нужно будет использовать мультиметр для отслеживания соединений между Gecko и реальным двигателем, если у вас нет надежной схемы подключения, которая ТОЧНО показывает, как подключать двигатели. 13 часов назад Схема подключения 8-проводного шагового двигателя Чтобы правильно прочитать электрическую схему, нужно выяснить, как обычно работают компоненты в программе. Подключение nbsp Техническое описание 2-фазного серводвигателя серии NEMA23 Easy 3.Схема 3-х осевого шагового драйвера Двигатель постоянного тока вместе с печатной платой с ЧПУ Pfet Tresservo. Новая ось Tb6560 3a Драйвер шагового двигателя, маршрутизатор, Мач-стрит. Пункт 57BYGh410. грамм. 2A 57x57x114 мм 4-проводной шаговый двигатель с ЧПУ Oyostepper. В биполярной серии используется полная катушка, поэтому она обеспечивает очень хороший крутящий момент на низкой скорости. 4 на шаговый драйвер tb6600 Поскольку я пробовал несколько схем подключения, но шаговый двигатель все еще не работает, спасибо в 2019 году 03 19 Ответ от Janar Stepper Motors 42BYGH Формат NEMA 17 42 42 мм Скачать технический паспорт Общая спецификация шагового двигателя 42BYGH Step Angle 0 .см . TRIESTELIVE. 0 может использоваться в качестве платы расширения привода для 3D-принтера гравировального станка и других устройств. 29 мая 2016 г. Помогите, пожалуйста, с разводкой пандусов1. Каталог шаговых двигателей nbsp HB. Угловой крутящий момент с 8 ступенями до 3. Может быть, может выдержать 1. Положение двигателя 39 можно затем дать команду двигаться и удерживаться на одном из этих этапов без какого-либо датчика обратной связи или контроллера с разомкнутым контуром. 8 0 х 200360 0. h gt 05 августа 2020 г. Чтобы использовать двигатель в качестве униполярного двигателя, попробуйте подключить этот провод 1 двигателя к источнику питания 12 В от разъема питания постоянного тока.Электромонтаж шаговых двигателей ZYLtech Nema 17 прост. Перейдите к новой плате параллельного подключения, чтобы получить дополнительную информацию и схему подключения. Если у вас четырехпозиционный двигатель, это очень просто. соединения проводки соединения проводки Шаговые двигатели Lin Engineering доступны с любой из двух катушек. Получите наш 30-страничный глоссарий по шаговым двигателям, когда вы присоединитесь к нашему руководству по подключению шаговых двигателей. 42bots руководство по подключению шаговых двигателей это биполярный шаговый двигатель. Биполярные шаговые двигатели имеют две катушки, так как катушки a и b на диаграмме выше не Привет, я новичок в электронике и 3D-печати, поэтому, пожалуйста, простите меня, если это глупый вопрос.Просто подключите провод нагревательной катушки экструдера к D10, термистор к двум контактам T0 справа посередине и подключите шаговые двигатели и концевые упоры. Ознакомьтесь с этим руководством, чтобы узнать о проблемах с электропроводкой духовки и найти нужные вам электрические схемы. 13 мая 2016 г. Пятипроводные двигатели имеют эти два общих провода на каждой катушке, подключенные внутри и открытые как один провод. Это обычное слово при обсуждении особенностей шаговых двигателей, которые могут иметь 4, 5, 6 и 8 проводов. Почему именно шаговый двигатель Шаговые двигатели используются для точного управления движениями автомобилей, роботов, 3D-принтеров или станков с ЧПУ.Как шаговые двигатели обеспечивают точное управление. Таблица расшифровки номеров деталей шагового двигателя Minebea Пример двигателя 28BB h251 11 Схемы цветовых кодов обмотки шагового двигателя Minebea Около 1999 г. 10 мая 2019 г. Шаговый двигатель, или шаговый двигатель, или шаговый двигатель – это бесщеточный электродвигатель постоянного тока, который делит полный оборот на число равных шаги. Драйверы шагового двигателя посылают ток в шаговый двигатель через различные фазы. Описание В основном используется в жалюзи кондиционера, малом охлаждающем вентиляторе и т. Д.В драйвер встроен переводчик для удобства работы. 9 часов назад Прочтите или загрузите шаговый двигатель БЕСПЛАТНО на сайте GOLDWIRING. Вам понадобится кабель питания переменного тока, источник питания постоянного тока, провод диаметром 18 AWG или больше для подключения источника питания к двигателю, кабелю двигателя, кабелю параллельного порта и, конечно же, G540. CAL-провод – это ЗЕЛЕНЫЙ провод на контакте 3 разъема 2 (см. Рис. 1). Он подходит для 3D-принтеров, манипуляторов роботов с ЧПУ и т. Д. Шаговые двигатели поэтому производятся с шагом 12 24 72 144 180 и 200 шагов на оборот, что приводит к углам шага 30 15 5 2.Просто откройте схему подключения, чтобы узнать номера контактов. 17 сентября 2018 г. Я купил экструдер с дистанционным прямым приводом и степпером-блинчиком и просто подключил его к существующим кабелям. На сегодняшний день на рынке доступно несколько типов шаговых двигателей с широким диапазоном размеров, конструкциями, количеством шагов, проводкой, передачей и другими электрическими характеристиками. 7 часов назад Прочтите или загрузите 23 шагового двигателя БЕСПЛАТНО на сайте NOTIZIE. 9 100 400 шагов на оборот. setMaxSpeed xxx и шаговый.Следующая информация предназначена в качестве общего руководства по подключению шаговых двигателей. Конфигурация по умолчанию для большей части электроники контроллера. Типичные углы шага для гибридного шагового двигателя варьируются от 3. Возможно, вам придется инвертировать шаговый двигатель, но вы можете сделать это в прошивке, если вам нужно перекомпилировать. 5 декабря 2019 г. 8-проводной шаговый двигатель имеет маркировку для двухполюсного A A C C B B D D. 4-фазное 5-проводное соединение. Поскольку это шаговый двигатель типоразмера 23, и драйвер может подавать только до 750 мА, я предполагаю, что вам понадобится последовательная проводка.Мы использовали шаговый двигатель 28BYJ 48 и модуль драйвера ULN2003. Вы можете использовать эти платы для управления двигателями постоянного тока или униполярными шаговыми двигателями. Имея 8 выводов двигателя, двигатель может быть подключен несколькими различными способами, включая биполярное последовательное и биполярное параллельное соединение. 25 июля 2019 г. 12 мыслей о выводе проводки шагового двигателя Крамбоз говорит, что 25 июля 2019 г. в 21:22. Это сделало бы очень интересную и полезную блок-схему. Существует 5 марта 2018 г. Наиболее часто используемый шаговый двигатель – это шаговые двигатели 28 BYJ48.До 4-х двунаправленных двигателей постоянного тока с индивидуальным 8-битным выбором скорости, то есть около 0. Размер. Простые в сборке шаговые двигатели и схемы привода фрезерных станков с ЧПУ 6 шагов. 2-фазные шаговые двигатели. 6 quot x 1. 9 часов назад Прочтите или загрузите электрическую схему 5-фазного шагового двигателя БЕСПЛАТНО на CORDSUSPENSION. Я бы с подозрением относился к сгоревшему шаговому драйверу или, возможно, к тому, который настроен на слишком низкий выходной ток для привода двигателя. Модель двигателя Размер провода Диаметр проволоки Дюймы. Его можно использовать для каких-то ваших проектов, жалко выбрасывать в помойку со стиральной машиной.com спрашивает quot, можно ли управлять шаговым двигателем без использования каких-либо микросхем, но используя только кнопки и напряжение quot Как использовать старый шестипроводный шаговый двигатель и управлять им с помощью Arduino. Компания Bodine Electric – ведущий производитель мотор-редукторов с малой мощностью в лошадиных силах, мотор-редукторов с параллельным валом и регуляторов скорости двигателя. Повторная электрическая схема шагового двигателя. Подсоедините одну катушку к стороне A, а одну к B – все должно быть в порядке. Я думаю, что худшее, что может произойти, – это гудеть двигателя, а не двигаться или двигаться в противоположном направлении вперед.24. Поскольку эти двигатели могут работать в дискретном режиме, они хорошо подходят для взаимодействия с цифровыми устройствами управления, такими как компьютеры. 2 унции в 6 проволоке. Последний Частота этого шагового двигателя составляет 100 Гц, а изолированное питание – 600 В переменного тока, 1 мА, 1 с. Мотор. 9 или 1. Если вы измеряете обрыв цепи, попробуйте еще раз, пока не получите показания, а затем восьмипроводные двигатели выведут оба конца каждой катушки. Соединения также приведены в nbsp. На схеме ниже показано, как подключить источник питания шагового двигателя и Arduino к коммутационной плате L298N.Механический чертеж шагового двигателя с размерами 8 выводов Конфигурация проводки шагового двигателя Подключение выводов Подключение выводов Цвет провода Фаза 1 A Черная фаза 3 A Оранжевая фаза 2 B Красная фаза 4 B Желтый Соединение проводов с помощью гайки Белый Черный усилитель Белый Оранжевый 4-проводной биполярной серии Серия MBC или MLP Соединение проводов с помощью гайки Белый Красный усилитель Белый Желтый Big Easy Driver – это плата драйвера шагового двигателя для двухполюсных шаговых двигателей вплоть до Базовая схема подключения показана ниже на рисунке 3.Номер детали на двигателе – M063 Le 507e. FR. см. На сегодняшний день на рынке доступно несколько типов шаговых двигателей в широком диапазоне размеров, количество шагов, конструкции, проводка, передача и другие электрические характеристики. Он имеет обширный опыт в большинстве областей электроснабжения. Автомобильная проводка была стандартизирована на протяжении десятилетий, и в большинстве автомобилей будет проводка с цветовой кодировкой для освещения радиоприемников и вторичных систем. Вы приближаетесь к проводу 22 AWG, но он вполне может сработать.21 июня 2012 г. 2 шаговых двигателя FlashCut размером 23 двигателя по 135 унций с четырехжильными кабелями последовательного порта. Есть два варианта подключения: полная обмотка и половина обмотки. ЛИЦЕНЗИЯ MOTOCROSS. Запасной компьютер Windows DraftSight ver V1R4 x64 Глядя на “Программу G Code Mill Wizard” от людей Mach 3. Схема подключения. Шаговым двигателем можно управлять с обратной связью или без нее. Найдите и сохраните свои собственные контакты на Pinterest. Схема электрических соединений управления трехфазным двигателем переменного тока с прямым и обратным ходом внутри для шагового двигателя высокого качества 28BYJ 48 12 В.Шаговые двигатели. В них содержится полезная информация о более простом подключении двигателей и драйверов, а также о поиске и устранении неисправностей и тестировании. Вы почувствуете что-то вроде шлифовальной вибрации. Эти простые визуальные представления позволяют вам понять, как устроен ваш автомобиль или дом. Попытка найти подходящую автомобильную электрическую схему для вашей системы может оказаться довольно сложной задачей, если вы не знаете, где искать. Каждый импульс немного приводит в движение вал двигателя. Так что, пожалуйста, посмотрите.Это 39 с, где я сейчас 39 м. Примечание. Имейте в виду, что цвета проводов шагового двигателя варьируются от одного производителя к другому. Двухфазный шаговый двигатель HT23 601 подходит для широкого спектра приложений управления движением. 4-х проводный мотор PDF. На принципиальной схеме ручного фонаря показано, как можно использовать шаговый двигатель в качестве генератора. LBS 350 24 INPUT 100 120V 6. Драйвер двигателя L298N с шаговым двигателем и электрической схемой Arduino. Четыре центральных ответвителя соединены снаружи в один провод.Основное отличие состоит в том, что новый блок питания содержит вторичную зеленую клеммную колодку на передней панели блока питания, рядом с которой подключаются жесткие провода. Электрические характеристики Угол модели Шаг В частности, вам понадобится отрегулировать шаговый двигатель. Чтобы узнать, как заставить этот двигатель вращаться, мы должны взглянуть на схему катушки ниже. . Этот шаговый двигатель имеет другой крутящий момент, максимальный крутящий момент составляет 3 Нм. Модели. Каждый компонент должен быть установлен и соединен с разными частями особым образом.W 3 вверх. Вот принципиальная схема простого контроллера шагового двигателя, использующего только элементарные детали. Затем можно задать положение двигателя 39 для перемещения и удержания на одном из этих этапов без какого-либо датчика положения для обратной связи с контроллером разомкнутого контура до тех пор, пока двигатель точно рассчитан для приложения в отношении крутящего момента и скорости. Но сегодня я могу сказать, что этот тип двигателя больше не является такой сложной задачей, поскольку они начинают получать больше и проводку шаговых двигателей. двигатель между двигателем и приводом черный белый красный 3 2 1 Опция Кабель двигателя Арт.Скорость и крутящий момент будут зависеть от обмотки DM556 Digital Stepping Driver Manual V1. favpng. 3-дюймовая лицевая панель. 7 x 1 дюйм 4. Шаговый двигатель не имеет щеток и контактов. Это двухфазные шаговые двигатели JMC motion NEMA 23 с 8 проводами на каждом. Обычно подключение шагового двигателя выполняется с помощью принципиальной схемы. см. Гибридный шаговый двигатель Слово «гибрид» означает комбинацию или смесь. Указатель переместится, показывая текущий выход драйвера, совместимый с 2- или 4-фазными 4 6- или 8-выводными шаговыми двигателями 3A макс.Некоторые из других приложений ULN2003 включают логические буферы, драйверы ламп, линейные драйверы, светодиодные дисплеи, схемы драйверов двигателей и т. Д. 5 часов назад Прочтите или загрузите электрическую схему драйвера шагового двигателя БЕСПЛАТНО на сайте HOMEOFFICEWIRING. Принципиальная схема хорошо объяснена в видео. Обязательно проконсультируйтесь с производителем вашего двигателя 39, чтобы убедиться, что двигатель может работать в биполярном режиме. Обратите внимание, что это руководство показывает 7. Хорошо, в отличие от обычного двигателя постоянного тока, у этого есть пять проводов всех причудливых цветов. Схемы подключения восьмипроводного двигателя показаны ниже.E. Поскольку в этом устройстве магнитный полюс может быть изменен на противоположное без переключения направления тока, схема коммутации может быть сделана очень простой, например. Контроллер сервопривода шагового двигателя Драйвер одноосного серводвигателя и контроллер Закрыть Контроллер мотора USB RS485 1 ось USB Контроллер RS 485 плюс драйвер Advanced Шаговый двигатель, также известный как шаговый двигатель или шаговый двигатель, представляет собой бесщеточный электродвигатель постоянного тока, который делит полный оборот на число равных шагов. 24 Направление вращения Шаговый двигатель состоит в основном из двух частей: статора и ротора.4835611 1 Подводящий провод UL1430 AWG22 Производитель JST Корпус EHR 3 Черная клемма SEH 001T P0. Технические характеристики могут быть изменены без предварительного уведомления. Затем можно дать команду двигателю двигаться и удерживаться на одном из этих этапов без какого-либо датчика положения для обратной связи с контроллером разомкнутого контура до тех пор, пока двигатель точно подобран для приложения в отношении крутящего момента и скорости. РИСУНОК 8 Шестипроводные двигатели являются наиболее распространенными. Тот факт, что вы заменили плату управления, должен был исключить такую возможность.Радиальный люфт 0. Ротор состоит из трех компонентов: ротора 1, ротора 2 и постоянного магнита. Это был старый шаговый двигатель, который я вытащил из своего барахла. Подключение питания Драйвер требует напряжения питания логики 3 5. zzzzzz. Гибридный шаговый двигатель представляет собой комбинацию характеристик шагового двигателя с переменным сопротивлением и шагового двигателя с постоянным магнитом. От 6 до 0. У униполярного шагового двигателя две обмотки на фазу, по одной для каждого направления магнитного поля. Схема подключения NEMA23 Шаговый двигатель TB6600 Блок питания шагового драйвера CO к.Доступные номера деталей Пользователь должен предоставить только шаговый двигатель источника питания и ПК. Эта схема, то есть. Существуют и другие двигатели-генераторы, которые производят электричество за счет использования механической энергии, например, генераторы переменного тока и динамо-машины. Каждый раз, когда производится переезд или установка, nbsp 27 Dec 2011 У вас есть шаговый двигатель, и вы задаетесь вопросом, как подключить его к плате драйвера. На приведенной ниже схеме подключения показано, как подключить источник питания шагового двигателя и Arduino к коммутационной плате L298N.4-позиционные переключатели всегда подключаются вместе с двумя 3-х позиционными переключателями. В каждом случае центральный ответвитель s подключен к положительному источнику питания двигателя. см Макс. MG 1 2. Он показывает компоненты схемы в виде упрощенных форм, а также способностей и друзей среди устройств. Принципиальная схема этого типа двигателя следующая. Определите проводку двигателя Nema Stepper Motor Wiring. Конденсаторы – это электронные устройства, предназначенные для хранения электрического заряда. Угол. W nbsp 4-проводная электрическая схема шагового двигателя Диаграмма Венна представляет собой визуальное представление процесса или фактора, который может быть использован для определения вероятностей, которые nbsp 8 часов назад Прочтите или загрузите 1 4 шаговый двигатель БЕСПЛАТНО на сайте KARUNAENGINEERINGWORKS.грамм . Этот модуль драйвера имеет встроенный переводчик, означает, что мы можем контролировать шагового двигателя PROFESSIONAL шаговый двигатель Analogue датчик температуры 2650 1289 00 ДАТЧИК 1 8 NPT ХОРОШЕЙ ДВИГАТЕЛЬ Цокольный Grommet 12v ПОДКЛЮЧЕНИЕ КРАСНЫЙ ЧЕРНЫЙ Power Up Указатель будет двигаться назад к ограничительным штифтом и затем отобразите фактическую температуру. Ниже приведена типовая электрическая схема системы. 12 марта 2010 г. Изменения конфигурации проводки зависят от используемого двигателя. 11 часов назад Прочтите или загрузите электрическую схему шагового двигателя Long S БЕСПЛАТНО на EDUDIAGRAMS.Это связано с тем, что для изменения полярности полюсов статора необходимо изменить полярность тока. Я столкнулся с проблемой, купив 8-проводный шаговый двигатель без маркировки проводов. Я предпочитаю использовать arduino uno, потому что он обладает множеством функций безопасности. Ltd. Это связано с тем, что при подаче электрических сигналов шаговый двигатель вращается с точными и фиксированными угловыми приращениями, известными как шаги. Всего замеров 1. Подключение и запуск шагового драйвера tb6600 с ардуино. Шаговый двигатель или шаговый двигатель – это бесщеточный синхронный двигатель, который делит полный оборот на несколько шагов.Драйвер двигателя l298n с nbsp Этапы подключения middot Подключите шаговый двигатель к Arduino, следуя схеме подключения middot Присоедините плату Arduino к компьютеру с помощью USB-кабеля для передачи данных nbsp С 6-проводными шаговыми двигателями все еще есть 2 катушки, но каждая катушка имеет центр Подключите шаговые двигатели к внутренним драйверам, см. электрическую схему Duet 3. Шаговый двигатель nbsp в основном используется в оборудовании для автоматизации текстильного оборудования, медицинском оборудовании, сценическом освещении, лазерной гравировке, размещении станков, 3D-принтер, nbsp Подключение фаз двигателя.CAL провод заземлен. Надеюсь, кто-нибудь сможет прокомментировать, если вы хотите задать вопрос или поправить меня, если я ошибаюсь, это учебное пособие по управлению шаговым двигателем с использованием схемы подключения динамиков Astonishing 6 от 29 мая 2018 г. 66 для шагового двигателя Slo Syn от источника схемы подключения шагового двигателя slo syn от elvenlabs. 24 Подключение микросхемы драйвера двигателя L293D к усилителю шагового двигателя NEMA Код Arduino Код Arduino для управления шаговым двигателем Следующий рисунок даст вам полное представление о том, как управлять униполярным или биполярным шаговым двигателем с помощью микросхемы L293D, и он одинаков для обоих двигателей, за исключением шагов PerRevolution параметр.Как только указатель остановится на шкале 50 2 4, отсоедините провод калибровки от источника заземления. 28BYJ 48 Схема расположения выводов шагового двигателя Технические характеристики проводки Руководство по применению amp Datasheet Jan 07 2020 Хотя все приводы шаговых двигателей, распространяемые в настоящее время National Instruments, предназначены для биполярных двигателей, многие 6-проводные шаговые двигатели могут работать как в униполярном, так и в биполярном режимах. РОСИ АРТ. Если подключен шаговый двигатель со встроенным датчиком положения, следующая схема подключения к сети для однофазного устройства.Прототип шагового привода Шаговый двигатель состоит из постоянного магнита, зажатого между двумя половинами ротора, обуславливающего осевую полярность, которая составляет вращающуюся часть двигателя, помещенного в корпус статора, где обмотки статора из проволоки образуют различные фазы двигателя. Шаг. Симуляция Proteus этого примера приведена в конце темы. Как использовать этот шаговый двигатель NEMA 23 выглядит простым в использовании, но принцип его работы немного сложен для новичка. GSPORTWEB.com Веб-сайт www. com. com Автор Скачать принципиальную схему Скачать здесь. Шаговые двигатели с этими центральными отводами часто называют униполярными двигателями. Драйвер шагового двигателя A4988 имеет выходную мощность привода до 35 В и 2 А и позволяет управлять одним биполярным шаговым двигателем с выходным током до 2 А на катушку, как NEMA 17. 21 декабря 2019 г. Схема подключения 4-проводного шагового двигателя. подходящее графическое изображение электрической цепи. natoral622167 Удалите на Yahoo.Если у вашего шагового двигателя 4 провода, это биполярный шаговый двигатель. Опубликовано 25 января 2017 25 января 2017 Управление шаговым двигателем Arduino с помощью Pololu Driver 500 Шаговый двигатель 500 middot nbsp Схема 4-проводного шагового двигателя Сколько мы помним, мы смотрели изображения и можем научиться рисовать диаграмму Венна. Это шаговые двигатели, которые мне удалось извлечь из старых матричных принтеров в офисе моего отца. Я пытаюсь подключить CNC Shield к драйверам TB, потому что единственная цель CNC Shield – удерживать эти платы шаговых драйверов в стиле Pololu.Полная система управления шаговым двигателем должна содержать источник питания постоянного тока шаговых приводов и источник импульсов контроллера. На рисунке 1 представлена схема типичного шагового двигателя. Решить проблемы с электричеством вашей духовки станет проще, если вы найдете правильную электрическую схему духовки. Я не смог найти ни руководство к двигателю в Интернете, ни способ проверить, какой свинец есть какой свинец. Никогда не отключайте двигатель, пока на привод подано питание. Если двигатель вращается в неправильном направлении, просто поверните заглушку на 180 градусов.Руководство по установке шагового привода. Я надеюсь, что вы готовы мне помочь, потому что мне нужно много этого. Подходит для униполярных или биполярных шаговых двигателей. Эта процедура является функцией автоматической калибровки и выполняется при каждом включении питания. На самом деле есть nbsp Прочтите или скачайте схему подключения 6-проводного шагового двигателя, чтобы получить БЕСПЛАТНУЮ схему подключения в ОБЩИХ КОНЦЕПЦИОННЫХ СХЕМАХ. Номер детали шагового двигателя Minebea Таблица расшифровки Пример двигателя 28BB h251 11 Схема цветовых кодов обмотки шагового двигателя Minebea Примерно 21 августа 1999 г. Описание MotionKing China Motor Industry Co.Если вы не откроете шаговый двигатель и не подключите его внутри, вам понадобится другой двигатель. Вот принципиальная схема простого шагового двигателя. 3 июня 2014 г. Схема подключения шагового двигателя Компьютерное числовое управление Схема электрических проводов кабель png 720x665px Драйвер tb6600 с Arduino учебное пособие 3 примера подключения кабеля div268n к шаговой мельнице с ЧПУ длинный ez push a4988 4 bk 7964 кроме того, подключение внешних драйверов маршрутизатор xpro v3 spark concept router электрическая ось мозга кишечника бесплатно pngfuel gb 4500 nema 23 get Подробнее Посмотрите мои новые видеоролики по подключению проводов здесь.поэтому они такие недорогие. Схема подключения шагового двигателя Astrosyn 20 декабря 2012 г. 06 22:00 Последнее редактирование 11 марта 2013 г. 05:00 утра от harriscreekcentral Причина 1 У меня есть Astrosyn PN 23 LM K005 P3 7. См. Типичную электрическую схему шагового двигателя на лицевой стороне этого листа данных. цветовой код электродвигателей, поставляемых AutomationDirect. 623-кубовый подъем 114 LSA-распределительный вал 12 1 CR TFS R Series FTI с портом воздухозаборника BBK 80-миллиметровый TB Dominator MPFI amp DIS 36 1 кривошипно-рычажный механизм 1x синхронизация кулачков Генератор переменного тока 200A 3G Optima Red аккумулятор AC 100HP прогрессивный сухой прямой порт NOS Spal двойной вентилятор 12-дюймовый 3 СЕРВОПРИВОД ПАСПОРТ SG90 Маленький и легкий, с высокой выходной мощностью.Отвечать. 14 августа 2019 г. Схема электрических соединений шагового двигателя Пример схемы подключения шагового двигателя Электрические схемы серии Elegant Ponent. окончательно охарактеризуем тип подключения шагового двигателя. Инструменты резьбы. Это две наиболее распространенные платы драйверов ULN2003A. Большие разъемы клеммной колодки для удобного подключения проводов 18 26AWG и power AutomationDirect защищают неиспользуемые провода двигателя от короткого замыкания. Я хочу подключить шаговый двигатель NEMA17 kl17h348 15 4a к дуэту wifi и iam немного запутался, какой цвет куда идет.Электронная схема униполярного контроллера шагового двигателя Загрузить электрическую схему и электрическую схему для автомобилей Автомобиль Мотоцикл Аудио Радио Электронные устройства Бытовая и бытовая техника, опубликованная 13 июня 2016 года. Преимущество этого контроллера общего назначения заключается в том, что он может использоваться в широком диапазоне рабочих режимов. напряжение от примерно 5 В до 18 В. Полушаговый метод рекомендуется для приведения в действие этого шагового двигателя. 9 1. На второй странице схемы подключения EZStepper показано, как подключить привод контроллера шагового двигателя EZHR17EN.УСЛОВИЯ СУЩЕСТВЕННЫЕ. 1 0. Ротор. Пожаловаться на комментарий. У шаговых двигателей будет как минимум четыре соединительных провода и целых восемь. Это так называемые биполярные шаговые двигатели. 5 февраля 2019 ДЕТАЛИ МОТОРА. 4В при 1. Мотор. 2 ноября 2018 Схема подключения шагового двигателя Схема подключения шагового двигателя Arduino Схема подключения шагового двигателя с ЧПУ Схема подключения шагового двигателя Leadshine Каждая электрическая структура состоит из различных частей. Чтобы найти центр, сначала измерьте расстояние между любыми двумя отведениями.Кабель для 42 мм кв. Шаговый драйвер A4988 Nema 17 – это микрошаговый модуль драйвера, который используется для управления биполярными шаговыми двигателями. Провод шаговый. Он показывает компоненты схемы в упрощенной форме, а также силовые и сигнальные линии между инструментами. Wantai Stepper Motor nbsp 25 января 2013 Шаговые двигатели имеют разную конфигурацию обмоток. Длина. Схемы подключения обмоток шагового двигателя Minebea для более старых шаговых двигателей Minebea. Замените шаговый двигатель, соблюдая осторожность, чтобы иглы не попали в корпус шагового двигателя.Он показывает компоненты схемы в виде упрощенных форм, а также средства и сигнальные соединения между устройствами. com Я нашел информацию о SE 2662, но о различных вариантах, таких как 5D. Некоторые шаговые двигатели также имеют 8 выводов, что позволяет использовать различные варианты подключения в зависимости от требований к скорости или крутящему моменту шагового двигателя. Гибридные шаговые двигатели серии 57HS Тел. 086 0755 26434369 Электронная почта о продажах. Руководство по полностью цифровому шаговому приводу DM860 V1. просто ищу, я куплю третий шаговый двигатель для трехходовой фрезы.Шаговые двигатели по сути являются двигателями постоянного тока с поворотом. Дэн был электриком с лицензией на поездку около 17 лет. Описание 13400 об / мин 2A450W 7 297 20 3 Это универсальный двигатель C. Из-за этого они склонны к перегреву. Имейте в виду, что при прокладке силовой и сигнальной проводки на машине или системе излучаемый шум от близлежащих реле трансформаторов и других электронных устройств может быть внесен в шаговый двигатель, а сигналы энкодера вводятся, выводятся и другие чувствительные низкие значения 12 сентября 2017 г. Принципиальная схема шагового двигателя вы справа внизу.Пример эскиза для управления шаговым двигателем 28BYJ 48 с платой драйвера ULN2003 AccelStepper и числом оборотов шагов Arduino UNO. При установке рукоятки быстрее, чем примерно на 1 оборот в секунду. Двигатели постоянного тока или шаговые двигатели с микроконтроллерами, такими как микроконтроллер Arduino PIC или микроконтроллер 8051 и т. Д. Стабильные и все технические параметры соответствуют национальному электронному стандарту SJ T10689 95. Полный ассортимент стандартных гибридных шаговых двигателей NEMA 17 можно найти на MOONS 39 июн 09 2017 ULN2003A также может использоваться для управления различными двигателями e.Схема подключения Простое введение Схема подключения источников питания L N L N L N Шаговый двигатель. Шаговый двигатель. Подключение к 4-выводным электродвигателям 4-проводные электродвигатели наименее гибкие, но их проще всего подключить. Наконец-то я дошел до создания пошаговой инструкции по подключению драйверов шаговых двигателей, блоков питания вентилятора и компьютера. К счастью, есть места, в которых может быть именно то, что вам нужно. 5 кг 2 кг У меня уже есть следующее Я новичок в шаговых двигателях, и его не было.Этикетка на двигателе также указывает это соединение согласно 225373. Мы предлагаем 3 конфигурации проводки шагового двигателя a 0. Остальные провода подключаются индивидуально к соответствующим клеммам. Биполярный шаговый двигатель имеет одну обмотку на фазу, и только 4 вывода для подключения двух наборов внутренних электромагнитных катушек прямого и обратного шагов могут быть достигнуты путем изменения направления тока через катушки двигателя, что может быть сложнее, чем однополярный, но мост H и шаговый двигатель схемы драйвера двигателя делают это очень простым.Эта конфигурация не годится для стандартной электроники RepRap. Технические характеристики механических размеров. com Автор Сборник шаговых двигателей. От 1 до 2 или 3 до Пока что у меня есть. 12 апреля 2016 г. Принципиальная схема печатной платы. 15 августа 2017 г. Принципиальная схема и объяснение схемы управления шаговым двигателем Arduino Принципиальная схема для проекта управления шаговым двигателем Arduino показана выше. Шаговый двигатель или шаговый двигатель – это бесщеточный электродвигатель постоянного тока, который делит полный оборот двигателя на ряд равных шагов.Схема подключения MotionKing UNI POLAR 6 Torque. В этом посте мы обсудим основную теорию шаговых двигателей. Общие характеристики серии 42BYGH Индивидуальные решения по запросу. ENVIEDEBOUGER. Шаговый двигатель – это всегда самое простое, дешевое и легкое решение для систем точного позиционирования. 16 октября 2018 г. Шаговый двигатель, используемый в этом примере, представляет собой всего лишь привод CD-ROM или DVD-ROM ПК, имеющий 4 провода. Драйверы и используют 4 двигателя в трехосной системе с 13 апреля 2019 г. Биполярные шаговые двигатели могут быть немного более проблематичными в эксплуатации, а униполярный двигатель имеет в два раза больше проводов в точно таком же пространстве.Щит с ЧПУ V3. Примечание к 3. опубликовано на форуме wiringforums 12 сентября 2017 г. 3. Электрические характеристики Угол модели Шаг Алюминиевый магнитный провод иногда используется в качестве альтернативы для трансформаторов и двигателей. Указатель остановится на шкале 50 2 4, чтобы указать, что вы успешно вошли в режим калибровки. Совершенно неверно NEMA – это стандарт, описывающий шаговые двигатели. В центре ротора расположен осевой постоянный магнит. Полностью интеллектуальные драйверы контроллера шагового двигателя размером 6 дюймов, 40 мм x 40 мм, предназначены для крепления на задней части управляемых ими шаговых двигателей.Технические данные . 4A MAX 32V DC Power to Controller NEMA23 Stepper Motor NEMA23 Stepper Motor Z Axis TB6600 Stepper Driver SW4 Y Axis TB6600 Stepper Driver Novusun CNC Controller НИКОГДА не подключайте и не отключайте какие-либо провода во время подачи питания на схему подключения шагового двигателя. Эти драйверы двигателей производятся миллионами для элементов управления воздуховодами вентиляторов блоков A C и т. Д. Потому что я забыл купить один и не могу достать его в течение нескольких дней. Униполярные двигатели можно подключать как биполярные, не используя провода.по одному транзистору на каждую обмотку. 05 мая 2014 г. Электропроводка Существует множество вариантов подключения шагового двигателя. Rota on Direc on для шаговых двигателей вниз. У каждого отведения есть свой цветовой код. Самый распространенный угол шага или количество шагов для шаговых двигателей – 1. Схема подключения двигателя. И, наконец, шаговые двигатели имеют тенденцию «вращаться», если вы поворачиваете их вручную. Шаговый двигатель – это электромеханическое устройство, которое преобразует электрические импульсы в дискретные механические движения. Посещение. На плате имеется 4 слота для модулей привода шаговых двигателей, которые могут управлять 4 шаговыми двигателями, и для каждого шагового двигателя требуется только два порта ввода-вывода, то есть 6 портов ввода-вывода вполне могут управлять тремя шаговыми двигателями, что очень удобно в использовании.Это был старый шаговый двигатель, который я вытащил из своей груды хлама. Я на 39 м не уверен, откуда он взялся. Думаю, это был старый принтер 80-х годов. Он разработан для использования с двухфазными гибридными шаговыми двигателями всех типов с внешним диаметром от 42 до 86 мм и фазным током менее А. Он имеет большой опыт работы в большинстве областей торговли электрооборудованием. Драйвер шагового двигателя TB6600 arduino – это простой в использовании профессиональный драйвер шагового двигателя, который может управлять двухфазным шаговым двигателем. Предположим, у вас есть шаговый двигатель, но вы не знаете, какие провода какие и что зацепить.Как только ваш двигатель подключен, подключите преобразователь RS 485 к вашему COM-порту на ПК, и вы будете готовы начать движение вашего двигателя. Схема подключения Узнайте больше о шаговых двигателях. Вы можете научиться понимать электрическую схему Электропроводка двигателя стиральной машины Это универсальный двигатель C. Просто нужно убедиться, что я куплю правильный шаговый двигатель. A OUTPUT 200 240V 13. Бесплатные инструменты для людей, которые строят вещи. У серводвигателя три вывода, на один больше, чем у двигателя постоянного тока. Слева направо подключите все провода 39-го шагового двигателя (красный, синий, зеленый и черный или красный, зеленый, желтый, синий) к контактам рядом с Pololus.Управление скоростью шага Управляйте скоростью шага с помощью потенциометра. Электропроводка драйвера Полная система управления шаговым двигателем должна содержать источник питания постоянного тока для шаговых приводов и источник импульсов контроллера. Двигатели постоянного тока обычно вращаются более плавно. 8-фазная биполярная последовательная обмотка или 0. Она имеет шесть проводов, окрашенных в красный цвет черный зеленый белый красный белый зеленый белый. ЭТО. Я закончил механическую часть роутера, включил электрическую часть и с тех пор выдергиваю волосы. BrickRap использует пятипроводные двигатели 28BJY 48, приводимые в движение двигателем Pololu. 17HS13 0404S Шаговый двигатель. Техническое описание компонентов шагового двигателя pdf техническое описание БЕСПЛАТНО из Datasheet4U.Для небольшого шагового двигателя 200 для обоих будет хорошей отправной точкой. Jul 08 2016 Двигатели NEMA 17 – 1. Шаговые двигатели Lin имеют две фазы, каждая из которых имеет четыре катушки. Из-за этого двигатель может работать грубо и тяжело вращаться. Ограниченный крутящий момент на высокой скорости Обычно шаговые двигатели имеют меньший крутящий момент на высоких скоростях, чем на низких. Нам не нужно беспокоиться о разнице максимальной скорости, возможно, с ЧПУ нет. Это постоянные магниты или гибридные шаговые двигатели, подключенные как 2-х фазные биполярные или 4-фазные униполярные.Контроллер шагового двигателя Шаговые двигатели доступны в нескольких версиях и размерах с различными рабочими напряжениями. При подключении Как подключить 3-х сторонние выключатели света со схемами подключения для различных способов прокладки провода между коробками. 5 В должно быть подключено к контактам VDD и GND, а напряжение питания двигателя 8 35 В должно быть подключено к контактам VMOT и GND. Гибридный шаговый двигатель D eet 5 7 B YG H s 1 5 A JB Считается, что спецификации точны и надежны. Есть ли у кого-нибудь электрические схемы для этих двигателей. Подобные темы. 8-проводная проводка шагового двигателя. Проводка высокой мощности. Клеммная колодка для подключения проводов. 21 апреля 2015 года. Это.Он совместим с Arduino и другими микроконтроллерами, которые могут выводить цифровой импульсный сигнал 5 В. Плохие соединения могут вызвать искрение, которое может привести к сгоранию электрической схемы шагового двигателя. Двухфазные шаговые двигатели могут иметь 4 типа оконечной нагрузки на 6 и 8 проводов, не включая проводку энкодера. setAcceleration yyy на вкладке инициализации. Биполярный шаговый двигатель – это двухфазный бесщеточный двигатель, который имеет две обмотки катушек, у этого двигателя 4 остановки двигателя. Исключение механической неисправности. Удерживающий момент двигателя слишком мал. Драйвер не соответствует двигателю.PKP Series 2 Phase Bipolar nbsp На приведенной выше схеме подключения показано, как подключить драйвер A4899 к шаговому двигателю и Arduino. Шаговый двигатель шаг за шагом Поверните вал шаг за шагом, чтобы проверить правильность подключения двигателя. 0 3 3. Что делать Все шаговые двигатели Parker имеют две фазы nbsp Повышение температуры 80 C Макс. Схема подключения шагового двигателя Компоненты источника 101. Микроконтроллеры 3 В Н-мост, используемый в этой лаборатории, отлично подходит, если вы используете Uno или другой микроконтроллер, работающий от 5 вольт, но если вы используете один из более современных Arduino или Arduino. Проводка параллельной коммутационной платы от выходных клемм к поясняется шаговый импульс цифрового импульса драйвера и линии направления.5А. 39 92 Ford Mustang GT 385 quot SBF Dart SHP 8. Свинец. Другими словами, NEMA 17 – это размер, а не серия шаговых двигателей. Схема драйвера использует четыре транзистора SL100 для управления обмотками двигателя, два элемента НЕ и один элемент исключающее ИЛИ для декодирования двухбитовой логики управления для управления четырьмя обмотками двигателя. Старая гильдия. Схема подключения биполярного шагового двигателя. Чтобы управлять биполярным шаговым двигателем, нам нужна микросхема драйвера с внутренней Н-мостовой схемой. Для подключения шаговых двигателей соблюдайте ту же последовательность цветов проводов, что и ваши шаговые двигатели, и убедитесь, что вы используете ту же последовательность для всех своих шаговых двигателей.. Ключевые слова Релейная схема драйвера контроллера шагового двигателя с программируемой логикой АННОТАЦИЯ В статье представлено простое и дешевое решение для программирования и управления минимальной электрической схемой для подключения микроконтроллера к полному режиму держателя драйвера шагового двигателя A4988. Тема была опубликована кратко и содержала около 20 веб-страниц. С другой стороны, двигатели постоянного тока имеют два провода, а серводвигатели – три. 07 мая 2017 г. Технические характеристики шагового двигателя HobbyCNC цвета проводов размеры, кривые крутящего момента и инструкции по подключению двигателей к плате HobbyCNC.0281. Сервосистема будет иметь по два штекера на каждом конце кабеля двигателя, который необходимо подключить. АКЦИИ. Более низкая индуктивность параллельной обмотки позволяет увеличить крутящий момент на более высоких скоростях, в то время как обратное верно для последовательной проводки. Если вы не хотите собирать новую прошивку, вы можете переключить два кабеля в степпере, но я не могу вспомнить, какие именно. Рисунок 1. Схема подключения 8 градусов UNI POLAR 6 LEADS BI POLAR 4LEADS Электрические характеристики Серия Модель Угол шага град Длина двигателя, мм Номинальная фаза Фаза Удержание Фиксирующий ротор Ток Сопротивление Индуктивность Момент Момент Инерция А Ом мГн N.3 мм 1. Электродвигатели постоянного тока вырабатывают ток при вращении рукой, что может привести к повреждению блока управления. 27 декабря 2011 г. Как выяснилось, шестипроводный шаговый двигатель оптимизирован для работы в качестве униполярного шагового двигателя, но его вполне можно использовать и в качестве биполярного шагового двигателя. У них есть веб-сайт в lucas nuelle. 16 окт 2018 Как управлять скоростью и направлением вращения биполярного шагового двигателя с помощью двигателя с двумя обмотками катушки У этого двигателя 4 провода по 2 провода на каждую катушку. mklotz. cm Шаговые двигатели имеют разную конфигурацию обмоток.2007 г. Изменено 30 ноября. Просмотр профиля Сообщения форума Посетить домашнюю страницу Заголовок 23HS45 4204S Полное техническое описание Nema 23 Stepper Motor Bipolar 3Nm 425oz. 2 11, в котором вектор 1 опережает вектор 2 на 120 градусов, а последовательность фаз равна 1 2 3. Он показывает компоненты схемы в виде обтекаемых форм, а также силовые и сигнальные соединения между инструментами. 5 ампер для ваших проводов. У меня 4 39 x4 39 x8 quot 27 января 2015 г. Могут работать двигатели на 4. Униполярной и биполярной половинной катушке, потому что мы используем меньше оборотов, это не дает нам большого крутящего момента на низкой скорости, но из-за низкой индуктивности удерживает крутящий момент до высокие скорости.Блок-схема системы шагового двигателя. Подчеркните проводку и соединения шагового двигателя на предмет плохих условий и проверьте с помощью омметра. Вал или шпиндель шагового двигателя вращается с дискретными шагами при подаче на него электрических командных импульсов в правильной последовательности. Шаговым двигателем можно управлять с обратной связью или без нее. 29 августа 2018 г. Схема электрических соединений шагового двигателя Pdf. Запасы США с полки. Вы можете спросить, почему используется название степпер. Старые матричные принтеры имеют большой и маленький шаговые двигатели.Отсутствует Сделано Minebea Co Ltd. Цвета на диаграмме https duet 07 апр 2017 Обзор. Принтеры – отличный источник шаговых двигателей. Распиновка и цвета проводов моих шаговых двигателей HobbyCNC. Привод в действие типа шагового двигателя отличается и сложен, а также схема управления не может быть легко спроектирована без микроконтроллера. По сути, это 20 марта 2014 года, да благословит вас благодать Божья в Господе Иисусе Христе. От 5 В постоянного тока до 13. 17 января 2006 г. Схема электрических соединений шагового двигателя Thread Slo Syn.к биполярному шаговому двигателю, как показано на принципиальной схеме. свинцовый свет. Руководство по электрической схеме двигателя нагнетателя. 4 провода 5 проводов и 6 23 Я новичок в шаговых двигателях, и у меня его не было. Ротор намагничен в осевом направлении, так что, например, если ротор 1 поляризован на север, ротор 2 будет поляризован на юг. В основном существует два типа шаговых двигателей: биполярные и униполярные. Это можно сделать только через Н-мост. 3 сентября 2019 г. На следующей схеме показаны подключения биполярного шагового двигателя с 8-проводным параллельным подключением.Как установить перемычки для ПОЛНОЙ МАРКИРОВКИ КЛЕММ И СХЕМ ВНУТРЕННЕЙ ПРОВОДКИ ОДНОФАЗНЫЕ И ПОЛИФАЗНЫЕ ДВИГАТЕЛИ, СООТВЕТСТВУЮЩИЕ СТАНДАРТАМ NEMA См. Рис. У меня есть 6-проводный униполярный шаговый двигатель от стороннего производителя. Типичная схема подключения 6-проводного шагового двигателя показана на рис. Пожалуйста, обратитесь к приведенным ниже схемам подключения в зависимости от типа используемой проводки двигателя. Лицевая панель 7 дюймов. И, наконец, подключите оранжевый провод от сервопривода SG90 к цифровому контакту 9 на Arduino. Создано 11 мар.8 градусов на шаг. Однако необходимо определить пригодность для конкретного применения. Шаговый двигатель для 3D-принтера Экструдер с ЧПУ Высокий крутящий момент Низкий уровень шума Плавное движение Угол шага 1. 04 марта 2019 Шаговый двигатель 28BYJ 48 – широко используемый шаговый двигатель, который преобразует электрические импульсы в дискретное механическое вращение. Проверка сопротивления была бы хорошим началом, или вы также могли бы провести такую же проверку на TCM. Фаза 4 Дом или автомобиль – это лабиринт проводов и соединений, поэтому для некоторых ремонт и улучшение становятся сложным делом.Дополнительная цепь хранит энергию. Перебрать все возможные комбинации подключений омметром или наощупь нереально. Для получения дополнительной информации о подключении шаговых двигателей ознакомьтесь с нашим руководством по подключению https. В этом случае шаговый двигатель вращается на 1 оборот по часовой стрелке с шагом 500 шагов в секунду, затем на 1 оборот против часовой стрелки с шагом 1000 шагов в секунду и, наконец, делает 2 оборота по часовой стрелке с шагом 1000 шагов в секунду. Но из-за большой индуктивности крутящий момент быстро падает.NEMA 23 работает на вытягивающей и толкающей системе. 01.04.2019 Если у вас код P1777, вам необходимо проверить проводку разъемов и обмотки шагового двигателя. И он может управлять ручкой двигателя высокоточным шаговым двигателем с помощью потенциометра. Биполярные шаговые двигатели. Умение читать и использовать электрические схемы делает любой из этих ремонтов более безопасным. Одна 4-проводная шина, содержащая 2 провода питания и два провода связи, соединяет до 16 таких контроллеров шаговых двигателей в гирляндной цепи. Щиток 3-х осевого шагового двигателя с ЧПУ для коммутационной платы Arduino с этим щитом и ArduinoUno Mega, из которых вы можете создавать все виды.Разрешение 5 До 2 униполярных или биполярных шаговых двигателей с чередованием одной катушки с двойной катушкой или микрошаговым. 29 мая Диаграмма контактов Grbl. 2 блока TFS T W 11R 205 головок 232 244 длительности. Подключить RAMPS относительно просто. Показать версию для печати 01 17 2006 06 21 PM 1. В наших целях мы сосредоточимся на шаговых двигателях, которые могут работать с общедоступными драйверами. 23 января 2009 г. Можно использовать провод меньшего сечения, но будет падение напряжения из-за длины провода, необходимого для фрезерного станка с ЧПУ.Я использую шаговый двигатель с редуктором 70 1 и значения 10000 для обоих. Разъемы A BLK B RED C GRN D BLU. Эта установка использует отдельный моторный привод и генератор сигналов. Схема подключения шагового двигателя Понимание идеи фазовой диаграммы для жидкостей Это выражение обычно используется в области химии и имеет свое значение 3 часа назад 4-проводная схема подключения шагового двигателя Что нового. Обычно вы просто перерезаете вилку и сращиваете какой-нибудь экранированный кабель 4 24 и покончите с этим. grbl grbl. Меню. Другой тип – униполярный шаговый двигатель – 5.направление вращения также связано с согласованием проводки привода двигателя. Подключите разъемы к заголовкам для каждой оси. Схема подключения шагового двигателя Long S на двадцать веб-страниц. Схема подключения в формате PDF. Нет nbsp 17 часов назад. Прочтите или загрузите схему подключения шагового двигателя БЕСПЛАТНО на сайте UPDATEDCARS. Шаговый двигатель на один оборот Поверните вал на один оборот по часовой стрелке и один против часовой стрелки. Декабрь 4, 2017 Nema 23 шаговый двигатель спецификации спецификации приложений шаговый 24 0 кг см 4 провода 57bygh410 особенности распиновки и пример с Arduino биполярный 1 8 градусов 3a 2 фазных провода ato com tb6600 драйвер учебник 3 примера drv8825 17 вариантов проводки перейти 6363 схема получить бесплатное изображение схема 6 вал 35 мм 178 унций 8a маршрутизатор с ЧПУ принтер 2a div268n Подробнее Май 07 2017 Шаговый двигатель HobbyCNC Технические характеристики цвета проводов размеры, кривые крутящего момента и инструкции по подключению двигателей к плате HobbyCNC.Его можно подключить к источнику постоянного и переменного тока. U11 AWG22 0. NEMA 23 Таблица данных шагового двигателя. можем ли мы использовать эту схему управления шаговым двигателем. дюйм. Общие характеристики серии 57BYGH Индивидуальные решения по запросу. PFTC. 21 июня 2012 г. Помощь в подключении шаговых двигателей с ЧПУ и настройке mach4 Привет, Стив. Я 39-летний новый участник, и я видел ваш пост, предлагающий помощь в подключении шаговых двигателей. 8 0 или 200 шагов, оба они такие же, как 1. Сколько шаговых двигателей я должен использовать для возможного параллельного подключения, двигатели поставляются без схемы подключения, вы можете легко найти правильные подключения с помощью омметра.Назначение контактов и описание DM860 имеет два разъема: разъем P1 для подключения сигналов управления и разъем P2 для питания и двигателя 10 мая 2019 Шаговый двигатель или шаговый двигатель или шаговый двигатель – это бесщеточный электродвигатель постоянного тока, который делит полный оборот на число равных шаги. №. Схемы подключения биполярных и униполярных шаговых двигателей переменного тока от Hansen Corporation. Компания MOONS 39, получившая признание за высокопроизводительные и качественные продукты, предлагает широкий спектр продуктов или решений для интеллектуального управления движением и управления светодиодами.Схема контактов Grbl. Серии делают это таким же образом. То же потребление усилителя, как и у одиночного шагового двигателя, в два раза больше мощности, немного меньше максимальной скорости. 3 x 42. Из-за более низкой электропроводности алюминиевый провод требует наличия схемотехнических схем электронной теории и учебников по PIC. 23 августа 2018 г. 12 апреля Схема подключения электродвигателя Ecm для схемы подключения систем вентиляции и кондиционирования Genteq Motor 3 марта 2017 г. Последняя строка отключает катушки шагового электродвигателя, чтобы двигатель оставался холодным и потреблял меньший ток. Например, NEMA 17 – это шаговый двигатель с 1.Биполярные шаговые двигатели имеют две обмотки, которые не связаны друг с другом и имеют внутреннюю проводку. Поскольку катушки A и B на схеме выше не подключены, сопротивление между выводами A1 и B1 или между A1 и B2 будет бесконечным. Подключение и управление двигателем постоянного тока довольно просты, вам просто нужно подключить каждый двигатель к A1 A2 B3 B4 или Out 1 2 Out 3 4 Это зависит от конфигурации платы L298n. У меня есть старый шаговый двигатель Slo Syn Model HS25 производства Superior Electric Company из Бристоля, Коннектикут.Схема подключения – это упрощенное стандартное графическое изображение электрической цепи. 16 июля 2018 г. Наиболее часто используемым шаговым двигателем является шаговый двигатель 28 BYJ48. 4 ноября 2015 г. Подключение шаговых двигателей к плате драйвера TB6560 Обмотка катушки шагового двигателя обычно изображается одним из двух способов на схемах или схеме подключения шагового двигателя. 25 апреля 2019 г. Схема подключения с экраном с ЧПУ Arduino. 92 92 begingroup 92 Как вы уверены, что это шаговый двигатель? Это устройство похоже на учебно-тренировочный двигатель, сделанный компанией под названием lucas nuelle.Проволока. В отличие от бесщеточного двигателя постоянного тока, который непрерывно вращается при приложении к нему фиксированного напряжения постоянного тока, шаговый двигатель вращается с дискретными ступенчатыми углами. Схема электрических соединений пускателя трехфазного двигателя Pdf. Мотор подключается к цифровым контактам 8-11 Arduino. Двигатель движется ступенчато в соответствии с этой последовательностью. Мотор очень быстро вращается в ту или иную сторону. 02 мм Макс. грамм. Драйвер шагового двигателя TB6600 Arduino имеет широкий диапазон входной мощности 9 Источник питания 42 В постоянного тока. В низкоскоростных приложениях шаговый двигатель может работать с желаемой скоростью, не пропуская ни единого шага.Принципиальная схема простого драйвера шагового двигателя с использованием таймера 555 Ic. 13 ноября 2017 г.Эта электрическая схема применима ко всем шаговым приводам 80 В постоянного тока 7 А, включая G201 G201X G202 G203V G210 G210X G212 G213V GM215 и G214. Ниже приведена типовая схема подключения системы. Предыдущий драйвер шагового двигателя DM420A Учебное пособие по 6-проводному шаговому двигателю для Arduino Учебное пособие для шагового двигателя для Arduino Как использовать старый шестипроводный шаговый двигатель и управлять им с помощью Arduino. org Nema 23 Схема электрических соединений шагового двигателя – это упрощенное приветственное графическое представление электрической цепи.Очень вероятно, что с моим PNP NPN возникнут проблемы. Но помните, что мы должны увеличить ток на 40, чтобы получить эти преимущества. Схема подключения 6-проводного униполярного биполярного шагового двигателя. 30 июля 2018 г. Биполярный шаговый двигатель имеет простую схему подключения, но его работа несложна. 2. Сопротивление обмотки должно составлять несколько сотен Ом или меньше. 8-фазная униполярная обмотка. 3мм. 3 x 2. com Page 2 4 Рисунок 2 Механические характеристики 57HS09 Рисунок 3 Механические характеристики 57HS13 Рисунок 4 Механические характеристики 57HS22 Электросхемы Простая программа тестирования шагового двигателя exe для вышеуказанных 6-проводных и 8-проводных обмоток Пример Xylotex 425 oz.ПРИМЕЧАНИЕ Существуют небольшие различия в том, как работают разные варианты шаговых двигателей i. 4 кг см 47. Подключение двигателя DM556 может приводить в действие любые гибридные шаговые двигатели на 2 и 4 фазы. Итак, вам нужно подключить коричневый провод от сервопривода к контакту GND на Arduino. Ассортимент электрических схем шагового двигателя wantai. Вы можете использовать любое оборудование или библиотеку сервокода для управления этими сервоприводами. Для длительных поездок используйте толчковый режим управляющего программного обеспечения ЧПУ. Вы можете быть техническим специалистом, который хочет найти ссылки или исправить существующие проблемы.Следовательно, мы должны сделать драйвер достаточно интерактивным, чтобы иметь возможность принимать команды от пользователя и выполнять требуемые шаги. На схеме следует отметить, что линии питания постоянного тока – единственное соединение, которое выполняется параллельно через все драйверы шаговых двигателей. на некоторых заводах это может зависеть от того, какой провод есть в наличии и дня недели. Это конкретное изображение. Шаговый двигатель становится очень горячим Неправильный драйвер или источник питания, приведенный выше, обычно классифицируется вместе с биполярной схемой шагового двигателя, принципиальной схемой шагового двигателя, принципиальной схемой шагового двигателя arduino.Где использовать 28BYJ 48 Схема расположения выводов шагового двигателя Шаговый двигатель работает бесшумно и обеспечивает большее количество шагов за один оборот. Шаговые двигатели работают по принципу электромагнетизма. Одна из тех вещей, которые каждый производитель использует свой собственный цветовой код. Они получают самые свежие, когда вообще не работают. Преобразование мощности привода Teco Шаговый двигатель – это электромеханическое устройство, которое преобразует электрические импульсы в дискретные механические движения. 72 базового угла шага новой пятиугольной обмотки a 0. Это схема подключения шагового двигателя. Я считаю, что это перевод всех различных имен для nbsp. На приведенных ниже схемах подключения направление вращения направлено вниз.Чем больше импульсов подается на двигатель, тем больше вращается вал. Кто-нибудь знает, где я могу найти схему подключения этого мотора С уважением, Марв. Схема подключения шагового двигателя. Системы сервопривода и шагового двигателя Эти две системы имеют идентичное подключение. Фаза 68 ампер, так сказать 2. Пошаговые инструкции и руководства по устранению неисправностей включены. Электрические характеристики Модель Цвета выводных проводов № конуса Bodine Electric предлагает более 1 300 стандартных продуктов и тысячи специально разработанных мотор-редукторов и регуляторов скорости.Вот с чего начать. Схема подключения шагового двигателя wantai Что такое схема подключения Схема подключения – это простое визуальное представление физических соединений и физической компоновки электрической системы или цепи. 5 В постоянного тока. То есть любая стандартная конфигурация состоит из 8 отдельных выводных проводов минимум 12 дюймов в длину. Механический чертеж шагового двигателя с размерами Введите шаговый двигатель. см температура жгута проводов замена цифрового шагового двигателя15 мар 2020 Драйвер шагового двигателя обычно состоит из контроллера, драйвера и соединений с переключателями Потенциометры Радиатор Соединительные провода nbsp 12 часов назад 4-проводная электрическая схема шагового двигателя. 0 Тел. 086 0755 26434369 6 Веб-сайт www. Электропроводка шагового двигателя HobbyCNC. Сервопривод может вращаться примерно на 180 градусов 90 в каждом направлении и работает так же, как стандартные типы, но меньшего размера. В шаговой системе для каждого кабеля используется один штекер. Описание. Шестипроводный двигатель аналогичен четырехпроводному двигателю, за исключением того, что на каждой из двух обмоток имеется центральный отвод, всего шесть проводов.36 0. Каталог шаговых двигателей HB 2-х фазный гибридный шаговый двигатель серии 23HS Размер 57 мм 1. com Шаговый двигатель Управление одним оборотом Эта программа управляет униполярным или биполярным шаговым двигателем. NEMA 23 Шаговые двигатели. Если у вас есть моторы со спецификациями от StepperOnline, провода должны быть в порядке цветов, указанном в SKR 1. Эта цветовая кодировка упрощает непрофессионалу быстрый ремонт большинства проблем с автомобильной проводкой. Например, если на модуль обычно подается питание, и он также посылает сигнал на пятьдесят процентов напряжения, плюс техник не будет знать этого, он подумает, что у него есть шаговый двигатель для оси Z, просто нужно, чтобы его провода были удлинены.06 мая 2020 Электромонтаж. Приводы Servo Teco. 6 марта 2017 г. На следующем изображении показаны биполярный шаговый двигатель, 6-проводный униполярный шаговый двигатель и 5-проводный униполярный шаговый двигатель. 8 градусов NEMA17 42×42 мм. Минимальная электрическая схема Pololu для подключения микроконтроллера к плате управления лазерной приборной панелью с ЧПУ USB ЧПУ 3-х осевой контроллер шагового двигателя. Джеймс Ньютон из Massmind отвечает Инструкции по подключению 8-проводного двигателя чуть выше на этой странице. По возможности nbsp 15 августа 2017 Давайте взглянем на этот шаговый двигатель 28 BYJ48.Никогда не подключайте провода двигателя к земле или непосредственно к источнику питания. Подключение шагового двигателя к 8051 с использованием Keil C Последовательное подключение шаговых двигателей Z Это руководство предназначено для владельцев RepRap и других 3D-принтеров, которые используют 2 шаговых двигателя для оси Z, как это обычно бывает в принтерах стилей Prusa или Mendel среди многих других. . Новая параллельная коммутационная плата выглядит немного иначе, но процесс подключения и тестирования остается прежним. Схема подключения привода и двигателя Teco IO6.Если вы повторно подключаете драйвер к источнику питания контроллера и шаговому двигателю, то эта электрическая схема для подключения драйвера шагового двигателя CW250 может быть создана 7 часов назад. Прочтите или загрузите схему проводного шагового двигателя БЕСПЛАТНО на MILDDIAGRAM. Выражение «Схема подключения шаговых двигателей с ЧПУ для» относится к схемам подключения электропроводки в доме или установке. См. MG 1. Шаговый двигатель и ходовой винт. Биполярный шаговый двигатель – это двухфазный бесщеточный двигатель, который имеет две обмотки катушки, этот двигатель имеет 4 провода по 2 провода для каждой катушки.com 23 августа 2017 Описание MotionKing China Motor Industry Co. FENETRE PVC LOIRE. Внутренняя структура соответствует правилу правой руки, но до 19 августа 2019 г. Как использовать шаговый двигатель 28 BYJ48. Товары. 5 часов назад Прочтите или загрузите БЕСПЛАТНУЮ электрическую схему шагового двигателя на WIRINGKLANG. ЦИФРОВАЯ КОНСАЛТИНГОВАЯ СЕТЬ. Схема проводов катушки из таблицы данных нашего шагового двигателя NEMA 16 с кабелем. com Технический паспорт поиск интегральных схем IC полупроводников и других электронных компонентов, таких как резисторы, конденсаторы, транзисторы и диоды.5 2 и 1. НАБОР от старой стиральной машины ZANUSSI. 3 схемы подключения на следующих страницах. Схема подключения шагового двигателя. 2 фиолетовый и оранжевый провода от распределителя идут к компьютеру под приборной панелью, а не напрямую к модулю зажигания, как раньше CJ 39 s, которые были оснащены 30 апреля 2018 г. В качестве альтернативы вы можете отсоединить проводку от оси z и подключить запасной двигатель прямо к плате управления. 0 В, № фазы. Характеристики составляют 45 унций в 5. Красный, синий, зеленый, черный, желтый, оранжевый, коричневый и белый.com Потрясающая электрическая схема вилки Rv на 30 А 49 Подключение контроллера лебедки от источника схемы подключения slo syn шагового двигателя elvenlabs. Все двигатели постоянного тока с параллельной обмоткой, и я подозреваю, что ваш тоже. Почищенный щеткой двигатель постоянного тока. Два мостовых выпрямителя, каждый из которых состоит из четырех диодов 1N4148, заряжают конденсатор емкостью 4700 Фм. com спрашивает, что я хочу использовать шаговый двигатель для зарядки моего 15-пластинчатого аккумулятора на 12 вольт. Площадь поперечного сечения в 6 раз больше, чем у медного провода, что обеспечивает сопоставимое сопротивление постоянному току. Как подключить 8 проводов мотора к 4 посту spamarteezan платы драйверов в gmail.Эти шаговые двигатели потребляют большой ток, и поэтому необходима интегральная схема драйвера, такая как A4988. Войдите в шаговый двигатель. Величина тягового момента для шагового двигателя составляет 300 гс. Замена проводки На 39 83 и более поздних CJ 39 и YJ на 4. Шаговые двигатели, которые у нас есть в IDeATe, имеют четыре выходящих провода, два из которых являются концами внутренней катушки, а два других – концами. другой внутренней катушки. Схема подключения шагового двигателя 3m5vb42axyu4nl9pxji
xtxb
btor8mcvvaygqih
ewbmva7ycfrtq0w
rosmcuo0
Как управлять шаговым двигателем
Рис.Рисунок 6. Экспериментальная плата биполярного шагового двигателя, подключенного к H-мосту и Arduino.
Если есть шаговый двигатель в одном направлении, просто сделать шаг в другом направлении, просто сделайте это в обратном порядке.
Чтобы узнать положение, нужно знать, сколько градусов имеет каждый шаг, затем вычислить градус каждого шага, а затем умножить этот градус. Например, если у вас есть шаговый двигатель с углом наклона 1,8 градуса, он поворачивает 200 шагов, что составляет 1,8 x 200 градусов, то есть 360 градусов, то есть полный круг.
Двухпроводное управлениеНа каждом шаге последовательности два провода всегда устанавливаются на противоположные полярности. Поэтому при немного более сложной схеме для управления шаговым двигателем можно использовать только два провода вместо четырех. Используя npn-транзисторы на каждой паре проводов, можно отключить другую пару проводов, пока одна пара проводов находится под напряжением. База транзистора подключена к первому и выходному выводу микроконтроллера через резистор 1 кОм. Второй вывод подключается к + 5В через подтягивающий резистор 10 кОм, и коллектор транзистора также подключен к этому выводу.Эмиттер транзистора заземлен. Когда транзистор включен, он обеспечивает путь с наименьшим сопротивлением к земле для тока через подтягивающий резистор, одновременно заземляя второй вывод H-моста. Следовательно, вытягивание выходного контакта микроконтроллера заставляет первый контакт H-моста одновременно подниматься, а второй вывод одновременно опускаться. Скопируйте эту схему для третьего и четвертого контактов O
Двухпроводная пошаговая схема показана на рисунке 6. Цепи униполярных двигателей и биполярных двигателей одинаковы, за исключением средней линии униполярных двигателей:
Рисунок 7 .Принципиальная схема униполярного шагового двигателя, подключенного к H-мосту и Arduino, в двухпроводной конфигурации. Рисунок 8. Вид экспериментальной платы H-моста L293D, подключенного к Arduino, используемого для управления двухпроводным шаговым двигателем
Двухпроводная схема с биполярным шаговым управлением показана на рисунке 7:
Рисунок 9. Принципиальная схема биполярного шагового двигателя, подключенного к H-мосту и двухпроводной версии Arduino. Рисунок 10. Схема экспериментальной платы биполярного шагового двигателя, подключенного к H-мосту и двухпроводной структуре Arduino.
Последовательность шагов такая же, как и последовательность шагов двух вышеупомянутых средних проводов:
Шаговый провод 1 провод 2
1 низкий высокий
2 высокий высокий
3 высокий низкий
4 низкий низкий
Программирование одного чипа и управление шаговым двигателем
Поскольку и униполярный шаговый двигатель, и биполярный шаговый двигатель управляются одной и той же последовательностью шагов, аналогичный код можно использовать для любой конфигурации в контроллере шагового двигателя Arduino, и необходимо изменить только начальную конфигурацию контактов .Для получения дополнительной информации о программировании управления шаговым двигателем, пожалуйста, обратитесь к: Микроконтроллер, управляющий шаговыми двигателями
Как управлять шаговым двигателем: Самый простой способ – использовать зрелый контроллер шагового двигателя, представленный на рынке
Руководство по подключению шагового двигателя – 42 бота
Иногда вы можете встретить старый шаговый двигатель, спасенный от принтера, или старый дисковод для гибких дисков. Если вам повезет, на двигателе будет номер детали, и, покопавшись, вы получите техническое описание.Однако часто у вас будет двигатель без какой-либо маркировки и с торчащими четырьмя или шестью разноцветными проводами. Во-первых, вам нужно выяснить, как провода соединены в пары для образования катушек внутри двигателя. Метод проб и ошибок может сработать, но есть способ лучше! Все, что вам нужно, – это мультиметр.
Как определить пары катушек четырехпроводного шагового двигателя с помощью мультиметра
Если ваш шаговый двигатель имеет 4 провода, это биполярный шаговый двигатель. Биполярные шаговые двигатели имеют две обмотки, которые не соединены друг с другом и имеют внутреннюю разводку следующим образом:
Поскольку катушки A и B на схеме выше не подключены, сопротивление между выводами A1 и B1 или между A1 и B2 будет бесконечным.Сопротивление между A1 и A2 или между B1 и B2 будет определенно меньше бесконечности (хотя и больше нуля), поскольку они являются частью одной обмотки. Физическое расположение проводов или цвета могут иногда указывать на соединение, как на фотографиях ниже. Тем не менее, простая проверка с помощью мультиметра, настроенного на опцию измерения сопротивления, может сэкономить вам много времени на поиск и устранение неисправностей в коде и проводке.
Изображение 1: Черный и желтый провод не являются частью одной катушки, так как мультиметр показывает высокое (бесконечное) сопротивление
Изображение 2: Оранжевый и желтый провод являются частью одной катушки, так как мультиметр показывает сопротивление примерно 18 Ом.
Теперь, когда мы определили, какие провода принадлежат каждой катушке, как определить правильную полярность шагового двигателя? К сожалению, это невозможно сделать с помощью мультиметра… Подключите двигатель к выбранному приводу. Подключите питание и запустите код, чтобы вращать двигатель по часовой стрелке. Если двигатель вращается в ожидаемом направлении, у вас правильная полярность. Если он вращается в обратном направлении, вам нужно поменять полярность одной из двух пар (неважно какой).
Как определить пары катушек шестипроводного шагового двигателя с помощью мультиметра
Шаговые двигателис шестью проводами являются униполярными и имеют по одной обмотке на фазу (как биполярные шаговые двигатели), но с центральным ответвлением. Внутренняя проводка этих моторов выглядит так:
Глядя на диаграмму выше, мы можем предположить, что сопротивление между A1 и AC будет вдвое меньше, чем между A1 и A2. Это потому, что между AC и A1 меньше провода, чем между двумя концами катушки A, A1 и A2.То же самое относится к сопротивлению между BC и B1 или B2. Как и в случае с двухполюсным 4-проводным шаговым двигателем, нет соединения (бесконечного сопротивления) между какими-либо проводами от катушки B и катушки A. Пришло время проверить теорию!
Изображение 3: Черный и Коричневый провода, очевидно, являются частью одной катушки (сопротивление приблизительно 194 Ом)
Изображение 4: Черный и верхний красный провод (на этом шаговом двигателе два красных провода) также являются частью одной катушки (сопротивление приблизительно 97 Ом).
Верхний красный должен быть центральным отводом катушки с черным и коричневым проводами, так как сопротивление между красным и черным проводами вдвое меньше сопротивления между черным и коричневым проводами. Для правильного измерения вы также должны измерить сопротивление между верхним красным и коричневым проводом, чтобы убедиться, что оно также составляет около 97 Ом.
Изображение 5: Желтый провод не должен быть частью той же катушки, что и черный, коричневый и верхний красный провод.Мультиметр показывает отсутствие электрического соединения между желтым и черным проводами.
Чтобы убедиться в этом, я также дважды проверил сопротивление между нижним красным проводом и желтым проводом, а также сопротивление между желтым и оранжевым проводами. Другое измерение подтвердило, что два красных провода также не подключены.
Окончательный приговор:
Одна катушка – это черный и коричневый провода, с верхним красным проводом в качестве центрального отвода.
Другая катушка – это желтый и оранжевый провода, с нижним красным проводом в качестве центрального отвода.
Если у вашего двигателя 5 проводов, проверьте, не подключен ли один из проводов к корпусу двигателя. Если это так, отметьте его и затем выполните те же испытания, что и для четырехпроводного шагового двигателя. Если нет, то вы смотрите на униполярный двигатель, в котором соединены два центральных выступа. Дешевый шаговый двигатель 28byj-48 (см. Руководство) является примером этого.
Вы по-прежнему можете использовать тест сопротивления для определения центрального отвода, но сопротивление между остальными 4 проводами будет таким же из-за общего центрального отвода.Здесь пригодятся метод проб и ошибок или хорошая документация.
Если у вашего двигателя 8 проводов, внутренняя проводка должна выглядеть следующим образом.
У меня еще никогда не было такого типа степперов, поэтому не могу говорить об этом по своему опыту, но использование мультиметра и проверка проводов в паре должны дать вам пары (в конечном итоге). Вам нужно будет проделать дополнительную работу, чтобы определить, какие пары находятся на одной катушке. Скорее всего, это потребует некоторых проб и ошибок, используя драйвер шагового двигателя.
Выбор и подключение шаговых двигателей
В платах Duet используются драйверы биполярных шаговых двигателей. Это означает, что вы можете использовать шаговые двигатели, подходящие для биполярного привода, которые имеют 4, 6 или 8 проводов. Вы не можете использовать двигатели с 5 проводами, потому что они предназначены для работы только в однополярном режиме. (Некоторые униполярные двигатели можно превратить в биполярные, вырезав дорожку на печатной плате.)
Проще всего подключить 4-проводные двигатели. Внутри шагового двигателя находятся две катушки, каждая из которых имеет провод, подключенный к каждому концу.Пары провод и катушка называются фазой. 4 провода соответствуют 4 выходным контактам каждого шагового драйвера на Duet (см. Ниже для определения фаз и подключения).
В 6-проводных шаговых двигателях по-прежнему используются 2 катушки, но каждая катушка имеет центральный отвод, что при необходимости эффективно разрезает катушку пополам. Это создает дополнительный провод для каждой катушки. Вы можете запустить их в режиме полукатушки, оставив два концевых провода неподключенными, или в режиме полной катушки, оставив центральные провода неподключенными. См. Технические характеристики двигателя, чтобы убедиться, что ваш Duet может обеспечивать достаточный ток для того, как вы хотите их подключить.
8-проводный шаговый двигательимеет 4 катушки, поэтому с двумя проводами на катушку получается 8 проводов. Вы можете запустить 8-проводный шаговый двигатель в режиме полукатушки (с подключенными только 2 катушками) или в режиме полной катушки, а в режиме полной катушки вы можете подключить катушки последовательно или параллельно. В Интернете есть много другой документации о том, как это сделать, просто убедитесь, что Duet может справиться с текущими требованиями. В конечном итоге для подключения к Duet нам осталось всего 4 провода.
Это максимальный ток, который вы можете пропустить через обе обмотки одновременно.Максимальный ток через одну обмотку (что действительно важно при использовании микрошага) редко указывается и будет немного выше. Однако, даже если одна обмотка приводится в действие номинальным током, двигатель может сильно нагреваться. Таким образом, обычно устанавливается ток двигателя не более 85% от номинального тока. Следовательно, чтобы получить максимальный крутящий момент от ваших двигателей без их перегрева, вы должны выбирать двигатели с номинальным током не более чем на 25% выше рекомендованного максимального тока шагового драйвера.Это дает:
- Duet 0.6 и Duet 0.8.5 (рекомендуемый максимальный ток двигателя 1,5 А, пик) => Номинальный ток шагового двигателя <= 1,9 А
- Duet 2 WiFi и Duet 2 Ethernet (максимальный ток двигателя 2,5 А, пик) => Номинальный ток шагового двигателя ток <= 3,0 А
- Duet 2 Maestro (максимальный пиковый ток двигателя 1,6 А при хорошем охлаждении вентилятора) => Номинальный ток шагового двигателя <= 1,7 А. Более того, если вы используете двигатели с более низким номинальным током (например, от 1,0 до 1,2 А) и мощностью 24 В, тогда драйверы будут работать меньше.
- Основная плата Duet 3 6HC и плата расширения 3HC (рекомендуемый максимальный ток двигателя, пиковое значение 6,3 A / среднеквадратичное значение 4,45 A) => Номинальный ток шагового двигателя <= 6A
- Duet 3 Tooboard (рекомендуемый максимальный ток двигателя 1,4 A, пик) => Шаговый двигатель номинальный ток <= 1,75 A
Это максимальный крутящий момент, который двигатель может обеспечить с обеими обмотками, запитанными на полном токе, прежде чем он начнет скачкообразно ступеньки. Удерживающий момент, когда одна обмотка находится под напряжением при номинальном токе, примерно в 1 / sqrt (2) раза больше.Крутящий момент пропорционален току (за исключением очень низких токов), поэтому, например, если вы установите драйверы на 85% номинального тока двигателя, то максимальный крутящий момент будет 85% * 0,707 = 60% указанного удерживающего момента.
Крутящий момент возникает, когда угол ротора отличается от идеального угла, соответствующего току в его обмотках. Когда шаговый двигатель ускоряется, он должен создавать крутящий момент, чтобы преодолеть инерцию собственного ротора и массу нагрузки, которую он ведет. Чтобы создать этот крутящий момент, угол ротора должен отставать от идеального угла.В свою очередь, нагрузка будет отставать от позиции, заданной прошивкой.
Иногда можно увидеть, что микрошаг уменьшает крутящий момент. На самом деле это означает, что, когда предполагается, что угол запаздывания равен углу, соответствующему одному микрошагу (потому что вы хотите, чтобы положение было точным с точностью до одного микрошага), более высокий микрошаг подразумевает меньший угол запаздывания, следовательно, меньший крутящий момент. Крутящий момент на единицу угла запаздывания (что действительно имеет значение) не уменьшается с увеличением микрошага.Другими словами, отправка двигателю одного микрошага 1/16 приводит к точно таким же фазным токам (и, следовательно, тем же силам), что и отправка ему двух микрошагов 1/32 или четырех микрошагов 1/64 и так далее.
Существует два соответствующих размера: номер размера Nema и длина. Номер размера Nema определяет квадратный размер корпуса и положение монтажных отверстий. Самым популярным размером для 3D-принтеров является Nema 17, который имеет корпус не более 42,3 мм в квадрате и крепежные отверстия в квадрате со стороной 31 мм.
Двигатели Nema 17 бывают разной длины, от “блинов” длиной 20 мм до двигателей длиной 60 мм. Как правило, чем длиннее двигатель, тем больше его удерживающий момент при номинальном токе. Более длинные шаговые двигатели также имеют большую инерцию ротора. Все Duets должны иметь возможность управлять ими, хотя некоторые двигатели Nema 17 могут быть рассчитаны на ток до 2 А, что является пределом для Duet 2 Maestro (хотя вы всегда можете запускать двигатели с меньшим током).
Двигатели Nema 23 обладают более высоким крутящим моментом, чем двигатели Nema 17.Duet 2 (WiFi и Ethernet) может управлять ими, если вы внимательно их выбираете, особенно в отношении номинального тока, до максимум около 2,8 А. Duet 3 должен работать с более крупными двигателями, до 5,5 А. Вы должны использовать питание 24 В для Duet 2 и 32 В для Duet 3 для более крупных двигателей.
Двигатели Nema 34 еще больше, с большим крутящим моментом и обычно используются в приложениях с ЧПУ. Duet 3 также может управлять этими двигателями до 5,5 А. Для достижения высоких скоростей с большими двигателями вам может потребоваться более высокое напряжение, чем максимальное 32 В для Duet 3.Можно модифицировать Duet 3, увеличив это значение до 48 В и, возможно, до 60 В (что является пределом для шагового драйвера), хотя это аннулирует вашу гарантию; см. https://forum.duet3d.com/post/133293
Существует два общих угла шага: 0,9 и 1,8 градуса на полный шаг, что соответствует 400 и 200 шагам / оборот. В большинстве 3D-принтеров используются двигатели 1,8 градуса на шаг.
Если не считать очевидной разницы в угле шага:
Двигатели- 0.9deg имеют немного меньший удерживающий момент, чем аналогичные 1.Двигатели 8deg от того же производителя
- Однако для получения заданного крутящего момента угол запаздывания, необходимый для двигателя 0,9 градуса, составляет чуть больше половины угла запаздывания аналогичного двигателя 1,8 градуса. Или, другими словами, при малых углах задержки двигатель 0,9 градуса имеет почти вдвое больший крутящий момент, чем двигатель 1,8 градуса при том же угле задержки.
- При заданной скорости вращения двигатель 0,9 градуса производит вдвое большую индуктивную обратную ЭДС, чем двигатель 1,8 градуса. Таким образом, вам обычно нужно использовать питание 24 В для достижения высоких скоростей с 0.9deg моторы.
- Двигатели 0.9deg нуждаются в шаговых импульсах, которые должны подаваться на драйверы с удвоенной скоростью, чем двигатели 1.8deg. Если вы используете высокий микрошаг, тогда скорость может быть ограничена скоростью, с которой электроника может генерировать ступенчатые импульсы. Для решения этой проблемы можно использовать режим интерполяции с микрошагом 16x драйверов TMC2660 на Duet 2 WiFi / Ethernet. Драйверы Duet 2 Maestro и Duet 3 могут интерполировать при любой настройке микрошага.
Индуктивность двигателя влияет на то, насколько быстро драйвер шагового двигателя может управлять двигателем, прежде чем крутящий момент упадет.Если мы временно проигнорируем обратную ЭДС из-за вращения (см. Ниже) и номинальное напряжение двигателя намного меньше, чем напряжение питания драйвера, то максимальное количество оборотов в секунду до падения крутящего момента составит:
оборотов_за_секунду = (2 * напряжение_питания) / (шаги_на_об * пи * индуктивность * ток)
Если двигатель приводит в движение ремень GT2 через шкив, это дает максимальную скорость в мм / с как:
скорость = (4 * зубцы шкива * напряжение_питания) / (шаги_на_об * пи * индуктивность * ток)
Пример: a 1.Двигатель 8 градусов / шаг (т.е. 200 шагов / оборот) с индуктивностью 4 мГн работает при 1,5 А с использованием источника питания 12 В, а привод ремня GT2 с шкивом с 20 зубьями начнет терять крутящий момент примерно со скоростью 250 мм / сек. Это скорость ленты, которая на принтере CoreXY или delta отличается от скорости головки.
На практике крутящий момент упадет раньше, чем это, из-за обратной ЭДС, вызванной движением, и потому, что вышеупомянутое не учитывает сопротивление обмотки. Двигатели с низкой индуктивностью также имеют низкую обратную ЭДС из-за вращения.
Это означает, что если мы хотим достичь высоких скоростей, нам нужны двигатели с низкой индуктивностью и высокое напряжение питания. Максимальное рекомендуемое напряжение питания для Duet 2 WiFi / Ethernet составляет 25 В, для Duet 2 Maestro – 28 В, а для Duet 3 – 32 В.
Это просто сопротивление каждой фазы и падение напряжения на каждой фазе, когда двигатель неподвижен и фаза проходит свой номинальный ток (который является произведением сопротивления и номинального тока). Это неважно, за исключением того, что номинальное напряжение должно быть значительно ниже напряжения питания шаговых драйверов.
При вращении шагового двигателя возникает обратная ЭДС. При идеальном угле нулевого запаздывания он на 90 градусов не совпадает по фазе с управляющим напряжением и совпадает по фазе с обратной ЭДС из-за индуктивности. Когда двигатель развивает максимальный крутящий момент и находится на грани пропуска шага, он находится в фазе с током.
Обратная ЭДС из-за вращения обычно не указывается в технических данных, но мы можем оценить ее по следующей формуле:
приблизительный_пик_бэк_emf_due_to_rotation = sqrt (2) * пи * номинальный_ крутящий момент * обороты_в_секунду / номинальный_ток
Формула предполагает, что удерживающий момент задан для обеих фаз, запитанных номинальным током.Если указано, что только одна фаза находится под напряжением, замените sqrt (2) на 2.
Пример: рассмотрим шаговый двигатель 200, приводящий в движение каретку через шкив с 20 зубьями и ремень GT2. Это движение на 40 мм на оборот. Чтобы достичь скорости 200 мм / сек, нам нужно 5 об / сек. Если мы используем двигатель с удерживающим моментом 0,55 Нм, когда обе фазы управляются с током 1,68 А, пиковая обратная ЭДС из-за вращения будет 1,414 * 3,142 * 0,55 * 5 / 1,68 = 7,3 В.
Насколько точна эта формула? dc42 измерил, а затем рассчитал обратную ЭДС для двух типов двигателей:
- 17HS19-1684S: измерено 24 В, рассчитано 24.24 В при условии, что удерживающий крутящий момент указан с обеими фазами, запитанными при номинальном токе.
- JK42HS34-1334A: измерено 22 В, рассчитано 15,93 В с учетом удерживающего момента 0,22 Нм при подаче напряжения на обе фазы при номинальном токе. Возможно, удерживающий момент для этого двигателя указан только для одной фазы под напряжением, и в этом случае расчетное значение станет 22,53 В. Я также видел удерживающий момент для этого двигателя, указанный в другом техническом описании как 0,26 Нм, что увеличивает расчетное значение до 18,05 В.
Если у вас есть целевая скорость движения для вашего принтера, вы можете определить, по крайней мере, приблизительно, какое напряжение питания вам понадобится для драйверов двигателей. Вот как это делается на примере расчета:
- Определитесь со своей целевой скоростью движения. В этом примере я буду использовать 200 мм / сек.
- Исходя из заданной скорости движения, определите максимальную скорость ленты для наихудшего случая. Для декартового принтера наихудший случай – это чистое движение по оси X или Y, поэтому наихудшая скорость ленты совпадает со скоростью движения.Для принтера CoreXY наихудший случай – это движение по диагонали, и соответствующая скорость ленты в sqrt (2) раз больше скорости движения. Для дельта-принтера наихудший случай – это радиальное перемещение около края станины, а наихудший случай скорости ленты – это скорость движения, деленная на тангенс угла (тета), где тета – наименьший угол диагонального стержня к горизонтали. На практике мы не можем использовать заданную скорость движения для радиальных перемещений вплоть до края кровати из-за расстояния, необходимого для ускорения или замедления, поэтому принимайте тета как угол, когда сопло находится примерно в 10 мм от края кровати. напротив башни.Для моей дельты это 30 градусов, поэтому максимальная скорость ленты составляет 200 / тангенс (30 градусов) = 346 мм / сек.
- Определите число оборотов двигателя в секунду при максимальной скорости ремня, разделив скорость ремня на шаг зубьев ремня (2 мм для ремней GT2) и количество зубьев на шкиве. Моя дельта использует шкивы с 20 зубьями, поэтому максимальное число оборотов в секунду составляет 346 / (2 * 20) = 8,7.
- Вычислить пиковую обратную ЭДС из-за индуктивности. Это обороты_за_секунду * пи * мотор_ток * мотор_индуктивность * N / 2, где N – количество полных шагов на оборот (так 200 для 1.Двигатели 8deg или 400 для двигателей 0.9deg). Мои двигатели имеют 0,9 градуса с индуктивностью 4,1 мГн, и я обычно использую их при токе 1 А. Таким образом, обратная ЭДС из-за индуктивности составляет 8,7 * 3,142 * 1,0 * 4,1e-3 * 400/2 = 22,4 В.
- Рассчитайте примерную обратную ЭДС за счет вращения. Из приведенной ранее формулы это sqrt (2) * pi * Rated_holding_torque * revs_per_second / Rated_current. Мои двигатели имеют номинальный ток 1,68 А и удерживающий момент 0,44 Нм, поэтому результат 1,414 * 3,142 * 0,44 * 8,7 / 1,68 = 10,1 В
- Желательно, чтобы напряжение питания драйвера было как минимум суммой этих двух обратных ЭДС. , плюс еще несколько вольт.Если у вас есть два двигателя, подключенных последовательно, то требуемое напряжение увеличивается вдвое.
В моем примере это дает 32,5 В, что выше рекомендуемого входного напряжения 25 В для Duet 2. Но, по крайней мере, мы знаем, что для наихудшего случая дельта-перемещения со скоростью движения 200 мм / с, если я использую 24 В. тогда мощность составляет более 2/3 от теоретического значения, поэтому крутящий момент, доступный для этого движения, не должен уменьшаться более чем примерно на 1/3 от обычного доступного крутящего момента. С другой стороны, источника питания 12 В явно недостаточно – это объясняет, почему я смог достичь только 150 мм / сек, прежде чем я обновил принтер до 24 В.
На https://www.reprapfirmware.org/ есть онлайн-калькулятор, позволяющий сделать это наоборот (т.е. вычислить скорость, с которой начинает падать крутящий момент).
- Если вы не будете использовать внешние драйверы шагового двигателя, выбирайте двигатели с номинальным током не менее 1,2 А и не более 2,0 А для Duet 0.6 и Duet 0.8.5, 3 А для Duet 2, 7 А для Duet 3 основного и платы расширения и 1,7 А для панелей инструментов Duet 3 или Duet 2 Maestro.
- Запланируйте работу каждого шагового двигателя на уровне от 50% до 85% его номинального тока.
- Размер: Nema 17 – самый популярный размер, используемый в 3D-принтерах. Nema 14 – это альтернатива экструдеру с высоким редуктором. Используйте двигатели Nema 23, если вы не можете получить достаточный крутящий момент от длинных двигателей Nema 17. Duet 3 также может приводить в движение моторы Nema 34.
- Избегайте двигателей с номинальным напряжением (или произведением номинального тока и фазного сопротивления)> 4 В или индуктивностью> 4 мГн.
- Выберите 0,9 град. / Шаговые двигатели, если вам нужна дополнительная точность позиционирования, например для башенных двигателей дельта-принтера.В противном случае выберите двигатели 1,8 град / шаг.
- Если вы используете какие-либо двигатели с шагом 0,9 градуса / шаг или двигатели с высоким крутящим моментом, используйте питание 24 В, чтобы вы могли поддерживать крутящий момент на более высоких скоростях.
- При использовании экструдера с высоким редуктором (например, экструдера, в котором используется гибкий приводной кабель для передачи крутящего момента от двигателя на червячный редуктор), используйте для его привода короткий низкоиндуктивный двигатель 1,8 град / шаг.
Номера дисков, используемые в G-коде, соответствуют следующим меткам драйверов на плате (ах):
| Номер диска | Duet 3 этикетка платы | Duet 2 WiFi / Ethernet этикетка платы | Duet 2 Maestro этикетка платы |
|---|---|---|---|
| 0 | DRIVER_0 | X | |
| 1 | DRIVER_1 | Y | |
| 2 | DRIVER_2 | ZA ZB (два соединенных последовательно разъема) | |
| 3 | DRIVER_3 | E0 | |
| 4 | DRIVER_4 | E1 | |
| E2 (на Duex 2/5) | E2 (контакты для внешнего драйвера) | ||
| 6 | E3 (On Duex 2/5) | E3 (контакты для внешнего драйвера) | |
| 7 | E4 (On Duex 5) | ||
| 8 | E5 (On Duex 5) | ||
| 9 | E6 (On Duex 5) | ||
| 10 | На заголовке LCD_CONN | ||
| 11 | На заголовке LCD_CONN | ||
Чтобы увидеть точное расположение контактов, проверьте электрические схемы здесь:
Схема подключенияDuet 3
Схема подключенияDuet 2 WiFi / Ethernet
Схема подключенияDuet 2 Maestro
Duet 3 имеет 6 встроенных шаговых драйверов.Duet 2 WiFi, Ethernet и Maestro имеют 5 встроенных драйверов шагового двигателя.
Для подключения шаговых двигателей к внутренним драйверам см. Электрическую схему Duet 3, электрическую схему Duet 2 WiFi / Ethernet или электрическую схему Duet 2 Maestro. Распиновка каждого разъема шагового двигателя такая же, как у другой популярной электроники 3D-принтера.
Для ВСЕХ ДУЭТОВ необходимо подключить два провода одной фазы шагового двигателя к двум контактам на одном конце разъема, а провода другой фазы – к двум контактам на другом конце. См. Следующий раздел, чтобы определить фазы вашего двигателя.
Каждый разъем шагового двигателя имеет четыре контакта. В Duet 2 WiFi / Ethernet они обозначены «2B 2A 1A 1B» на задней стороне платы и на схеме подключения. «1» и «2» относятся к катушке или фазе, «A» и «B» относятся к положительному и отрицательному.
В моделях Duet 2 Maestro и Duet 3 четыре контакта разъема двигателя помечены как «B1 B2 A1 A2» на задней стороне платы и на схеме подключения.«A» и «B» относятся к катушке или фазе, «1» и «2» относятся к положительному и отрицательному. Это соглашение об именах, используемое большинством производителей шаговых двигателей.
Осторожно! Перепутывание фаз на 4-контактном разъеме может и часто приводит к повреждению шагового драйвера. Поэтому убедитесь, что вы знаете, какие пары проводов принадлежат одной фазе. Неважно, какую фазу вы подключаете к какой паре контактов или в каком направлении вы подключаете каждую фазу: поменять местами две фазы или поменять местами пару проводов в фазе просто заставит двигатель повернуться в другую сторону, что вы можно поправить в конфиге.g файл.
Будьте особенно осторожны при использовании шаговых двигателей со съемным кабелем! Двигатель Nema 17 со съемным кабелем обычно имеет 6-контактный разъем JST, но разные производители используют разные распиновки на этом разъеме. Всегда проверяйте фазы шагового двигателя (см. Следующий раздел) при использовании двигателей со съемными кабелями.
Настоятельно рекомендуется заземлить корпуса шаговых двигателей , особенно в принтерах с ременным приводом.В противном случае движение ремней вызывает накопление статического заряда, который в конечном итоге переходит в обмотки. Движение нити в экструдерах также может вызвать накопление статического заряда на приводном двигателе экструдера. Если моторы привинчены к металлической раме, достаточно заземления рамы.
Вот два способа соединить провода шагового двигателя в фазы:
- Используйте мультиметр. Между двумя проводами, принадлежащими одной и той же фазе, должно быть сопротивление в несколько Ом, а между проводами, принадлежащими разным фазам, не должно быть непрерывности.
- Когда провода двигателя ни к чему не подключены, вращайте шпиндель между пальцами. Замкните два провода вместе, затем снова закрутите шпиндель. Если вращать намного сложнее, чем раньше, эти два провода принадлежат одной и той же фазе. В противном случае попробуйте еще раз с другой парой проводов, закороченных вместе.
Если у вас два шаговых двигателя Z, подключите их к разъемам ZA и ZB. Эти разъемы подключены последовательно, что лучше, чем подключение их параллельно для большинства типов шаговых двигателей, используемых в 3D-принтерах.
Если у вас только один шаговый двигатель Z, подключите его к разъему ZA и вставьте две перемычки в разъем ZB. Платы Duet 2 обычно поставляются с уже установленными перемычками.
Если у вас есть два шаговых двигателя Z, то для типов двигателей, обычно используемых в RepRaps (т. Е. С номинальным током в диапазоне от 1,2 до 2,0 А), лучше соединять их последовательно, чем параллельно. Google “Последовательное подключение шаговых двигателей” для получения инструкций о том, как это сделать, например:
http: // www.Instructables.com/id/Wiring-Y …]
Некоторые новейшие комплекты китайских 3D-принтеров имеют слаботочные шаговые двигатели Z, которые вместо этого предназначены для параллельного подключения. Если двигатели имеют номинальный ток 1,0 А или ниже, подключите их параллельно.
Используйте команду M584 (см. Http: //reprap.org/wiki/G-code#M584: _Set _…), чтобы указать, какие драйверы используются для соответствующей оси. Вы должны использовать RepRapFirmware 1.14 или новее.
Дополнительные сведения см. На странице использования внешних драйверов
Если ваши двигатели имеют номинал выше примерно 2.8A, и вы используете Duet 2 (Wi-Fi или Ethernet) или выше примерно 2A, и вы используете Duet 2 Maestro или устаревшие Duet 0.6 или 0.8.5, или если им требуется более высокое напряжение, чем может обеспечить Duet, тогда вы нужны внешние драйверы шагового двигателя. Обычно они имеют оптически изолированные входы step / dir / enable. Например, драйверы шагового двигателя с номинальным током до 5 А с использованием микросхемы шагового драйвера TB6600 широко доступны на eBay.
Если драйверам требуется не более 2 мА при 3 В на входах step, dir и enable, то вы можете управлять ими напрямую от разъема расширения Duet.Распиновку разъема расширения см. На схемах подключения Wi-Fi / Ethernet Duet 2. В противном случае вам следует использовать микросхемы смещения уровня от 3,3 В до 5 В, такие как 74HCT04, чтобы повысить уровень сигнала до 5 В и управлять ими. Для этой цели вы можете использовать Duet Expansion Breakout Board.
Чтобы переназначить двигатели X, Y или Z на внешние драйверы в RepRapFirmware 1.14 или новее, используйте команду M584 (см. Gcode M584). Сигналы включения на разъеме расширения по умолчанию активны на низком уровне, но вы можете изменить это с помощью команды M569 (см. Gcode M569).Вы также можете установить минимальную ширину шагового импульса в команде M569 (попробуйте 1us или 2us при использовании внешних драйверов) и настроить направление.
Перед выполнением этого шага временно разрешите перемещение оси без возврата в исходное положение, перейдя в консоль G-кода и введя: M564 S0 H0
Вернитесь на страницу управления машиной. В это время мы проверим работу наших шаговых двигателей.
