
Все о частотных преобразователях
Частотные преобразователи – это устройства для плавного изменения частоты вращения синхронных и асинхронных двигателей посредством изменения частоты питающего тока.
В современной технике благодаря простоте конструкции и обслуживания, небольшим габаритам, высокой надёжности, и низкой стоимости огромное распространение получили именно асинхронные электродвигатели.
При работе различных устройств, в качестве привода которых применяются асинхронные электродвигатели, часто возникает необходимость в регулировании их скорости вращения.
Исходя из формулы n = (1 – S)60f/p где n – скорость вращения ротора, S – скольжение, f- частота питающей сети, p – количество пар полюсов.
Существует три способа регулирования скорости вращения асинхронного двигателя:
- – изменение скольжения. Этот способ используется в двигателях с фазным ротором. В цепь фазного ротора вводится регулировочный реостат. При использовании этого способа можно получить большой диапазон регулирования частоты вращения в сторону понижения.

- – изменение числа пар полюсов. Этот способ предполагает использование специальных двигателей (многоскоростных) имеющих более сложную обмотку статора, позволяющую изменять число пар полюсов, и короткозамкнутый ротор. Недостатком этого метода является ступенчатое регулирование (3000, 1500, 1000, 750, 600 об/мин – 1,2,3,4,5 обмотки с 1,2,3,4,5 парами полюсов соответственно), большая стоимость и громоздкость двигателя.
- – изменение частоты питающего тока (напряжения). На практике этот метод, в общем случае (самый простой), предполагает вместе с частотой изменять и действующее значение подведенного напряжения таким образом, что бы отношение U/f было постоянно. Это (изменение входного напряжения) делается для сохранения перегрузочной способности двигателя с изменением частоты сети.


В приводах центробежных насосов и вентиляторов, которые являются типичными представителями переменной механической нагрузки (момент нагрузки возрастает с увеличением скорости вращения) используется функция напряжения к квадрату частоты U/f 2 = сonst.
В более совершенных частотных регуляторах для управления скоростью вращения и электромагнитным моментом двигателя независимо, используется так называемое векторное управление. При этом виде управления необходимо управлять амплитудой и фазой статорного тока (т.е. вектором) в зависимости от положения ротора относительно обмотки статора в каждый момент времени.
Применение частотных регуляторов. Зачем нужен частотный регулятор?
Асинхронные двигатели имеют ряд недостатков (сложность регулирования скорости вращения, большие пусковые токи, относительно малый пусковой момент). Однако благодаря своей простоте, надежности и дешевизне получили огромное распространение в промышленности и быту. Применение же частотных регуляторов «устраняет» недостатки асинхронных двигателей и кроме этого позволяет избежать установки различного дополнительного оборудования, уменьшить потери в технологическом процессе, увеличить КПД самого двигателя, уменьшить износ, как самого двигателя, так и оборудования использующегося в данном технологическом процессе.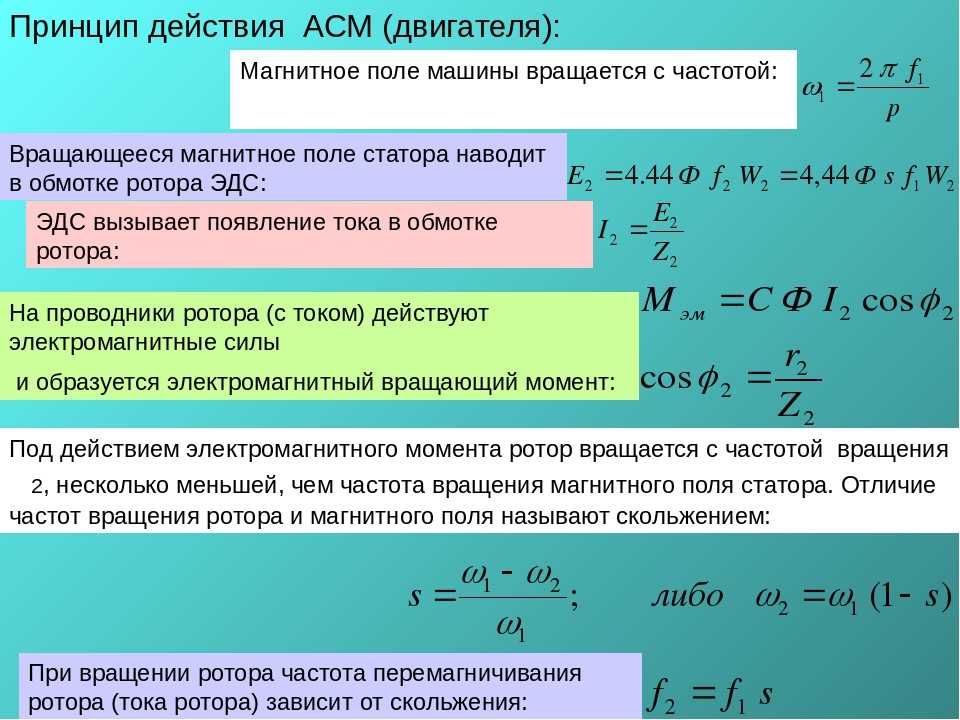
Рассмотрим более детально применение частотных регуляторов на примере насосного оборудования. Потери в технологической системе зависят от нагрузки создаваемой потребителями (на неё мы влиять не можем) и гидравлическим сопротивлением элементов этой системы. Так поддержание давления у потребителей на постоянном уровне при изменяющейся нагрузке, возможно только при использовании дополнительного оборудования (различных регуляторов давления, мембранных баков, дроссельных задвижек). Использование этого оборудования создает дополнительное гидравлическое сопротивление и как следствие снижает КПД системы в целом. При использовании частотного регулятора двигатель сам регулирует давление в сети посредством изменения частоты вращения. Кроме того при снижении технологической нагрузки уменьшая частоту вращения насоса, КПД самого насоса тоже возрастает. Таким образом достигается как бы двойной эффект увеличивается КПД системы в целом, за счёт исключения из системы лишнего гидравлического сопротивления и увеличение КПД самого насоса как агрегата.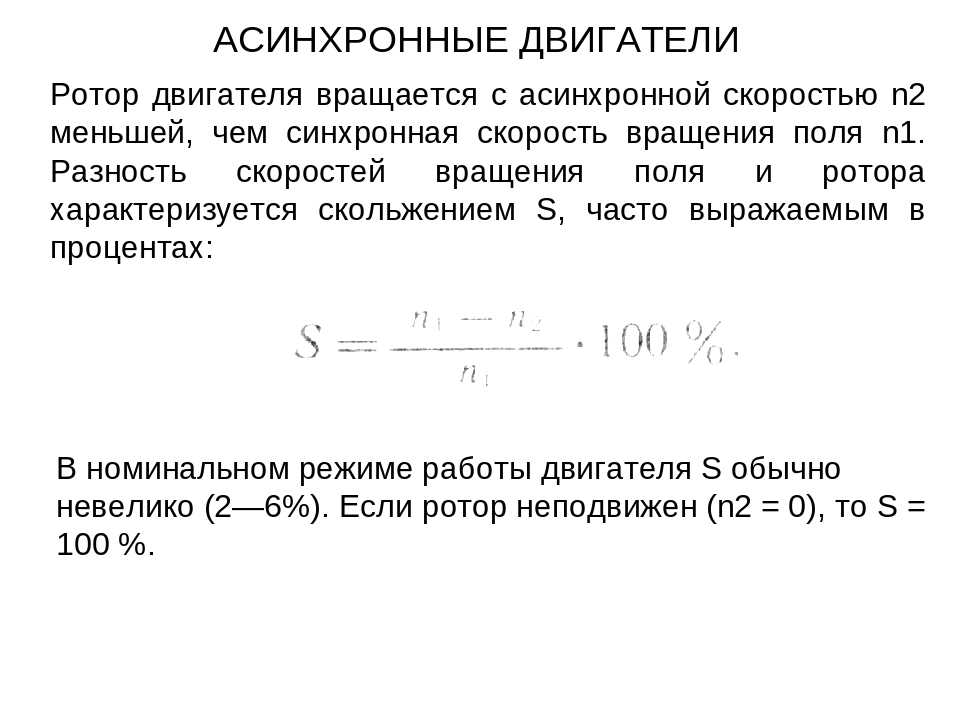
Применение частотного регулятора также значительно снижает эксплуатационные затраты связанные с износом оборудования. Плавное регулирование вращения (и плавный пуск) практически полностью позволяют избежать как гидравлических ударов, так и скачков напряжения в электросети (особенно актуально в системах, где предусмотрен частый пуск/остановка насоса).
← Отопление по – новому, или как правильно выбрать котел для автономного отопления | Торцевые уплотнения, причины выхода со строя в насосах →
Формула расчета частоты вращений
Содержание
- 1 Синхронные и асинхронные электромашины
- 1.1 Синхронная скорость
- 1.2 Скольжение
- 1.3 Регулировка частоты вращения
- 2 Двигатели постоянного тока
- 2.1 Номинальная скорость вращения
- 2.2 Регулировка скорости
- 3 Видео
При проектировании оборудования необходимо знать число оборотов электродвигателя. Для расчёта частоты вращения есть специальные формулы, различные для двигателей переменного и постоянного напряжения.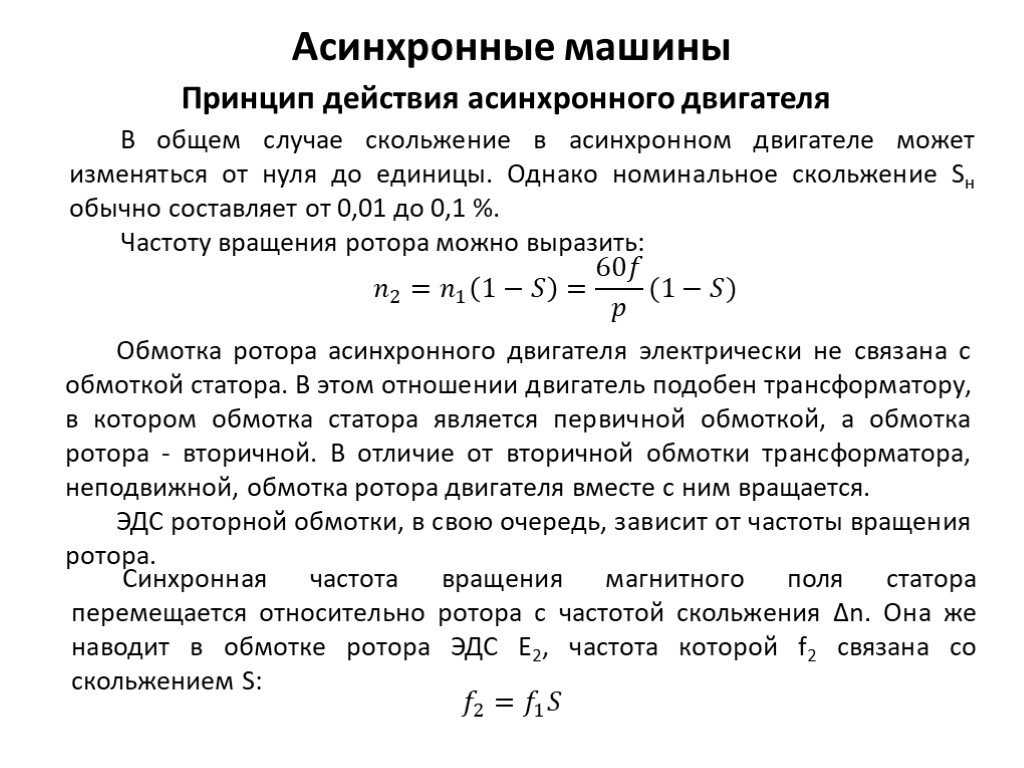
Тахометр
Синхронные и асинхронные электромашины
Двигатели переменного напряжения есть трёх типов: синхронные, угловая скорость ротора которых совпадает с угловой частотой магнитного поля статора; асинхронные – в них вращение ротора отстаёт от вращения поля; коллекторные, конструкция и принцип действия которых аналогичны двигателям постоянного напряжения.
Синхронная скорость
Скорость вращения электромашины переменного тока зависит от угловой частоты магнитного поля статора. Эта скорость называется синхронной. В синхронных двигателях вал вращается с той же быстротой, что является преимуществом этих электромашин.
Для этого в роторе машин большой мощности есть обмотка, на которую подаётся постоянное напряжение, создающее магнитное поле. В устройствах малой мощности в ротор вставлены постоянные магниты, или есть явно выраженные полюса.
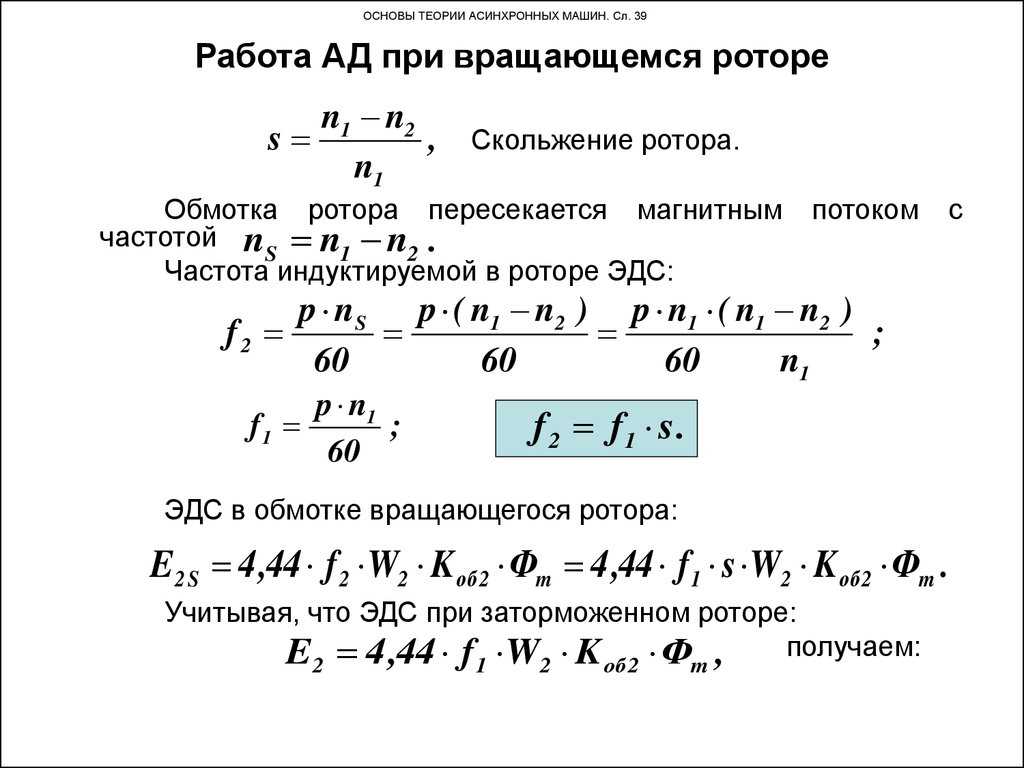
Скольжение
В асинхронных машинах число оборотов вала меньше синхронной угловой частоты. Эта разница называется скольжение «S». Благодаря скольжению в роторе наводится электрический ток, и вал вращается. Чем больше S, тем выше вращающий момент и меньше скорость. Однако при превышении скольжения выше определённой величины электродвигатель останавливается, начинает перегреваться и может выйти из строя. Частота вращения таких устройств рассчитывается по формуле на рисунке ниже, где:
Благодаря скольжению в роторе наводится электрический ток, и вал вращается. Чем больше S, тем выше вращающий момент и меньше скорость. Однако при превышении скольжения выше определённой величины электродвигатель останавливается, начинает перегреваться и может выйти из строя. Частота вращения таких устройств рассчитывается по формуле на рисунке ниже, где:
- n – число оборотов в минуту,
- f – частота сети,
- p – число пар полюсов,
- s – скольжение.
Формула расчёта скорости асинхронного двигателя
Такие устройства есть двух типов:
- С короткозамкнутым ротором. Обмотка в нём отливается из алюминия в процессе изготовления;
- С фазным ротором. Обмотки выполнены из провода и подключаются к дополнительным сопротивлениям.
Регулировка частоты вращения
В процессе работы появляется необходимость регулировки числа оборотов электрических машин. Она осуществляется тремя способами:
- Увеличение добавочного сопротивления в цепи ротора электродвигателей с фазным ротором.
 При необходимости сильно понизить обороты допускается подключение не трёх, а двух сопротивлений;
При необходимости сильно понизить обороты допускается подключение не трёх, а двух сопротивлений; - Подключение дополнительных сопротивлений в цепи статора. Применяется для запуска электрических машин большой мощности и для регулировки скорости маленьких электродвигателей. Например, число оборотов настольного вентилятора можно уменьшить, включив последовательно с ним лампу накаливания или конденсатор. Такой же результат даёт уменьшение питающего напряжения;
- Изменение частоты сети. Подходит для синхронных и асинхронных двигателей.
Внимание! Скорость вращения коллекторных электродвигателей, работающих от сети переменного тока, не зависит от частоты сети.
Двигатели постоянного тока
Резонансная частота: формула
Кроме машин переменного напряжения есть электродвигатели, подключающиеся к сети постоянного тока. Число оборотов таких устройств рассчитывается по совершенно другим формулам.
Номинальная скорость вращения
Число оборотов аппарата постоянного тока рассчитывается по формуле на рисунке ниже, где:
- n – число оборотов в минуту,
- U – напряжение сети,
- Rя и Iя – сопротивление и ток якоря,
- Ce – константа двигателя (зависит от типа электромашины),
- Ф – магнитное поле статора.
Эти данные соответствуют номинальным значениям параметров электромашины, напряжению на обмотке возбуждения и якоре или вращательному моменту на валу двигателя. Их изменение позволяет регулировать частоту вращения. Определить магнитный поток в реальном двигателе очень сложно, поэтому для расчетов пользуются силой тока, протекающего через обмотку возбуждения или напряжения на якоре.
Формула расчёта числа оборотов двигателя постоянного тока
Число оборотов коллекторных электродвигателей переменного тока можно найти по той же формуле.
Регулировка скорости
Регулировка скорости электродвигателя, работающего от сети постоянного тока, возможна в широких пределах. Она возможна в двух диапазонах:
- Вверх от номинальной. Для этого уменьшается магнитный поток при помощи добавочных сопротивлений или регулятора напряжения;
- Вниз от номинальной. Для этого необходимо уменьшить напряжение на якоре электромотора или включить последовательно с ним сопротивление.
 Кроме снижения числа оборотов это делается при запуске электродвигателя.
Кроме снижения числа оборотов это делается при запуске электродвигателя.
Знание того, по каким формулам вычисляется скорость вращения электродвигателя, необходимо при проектировании и наладке оборудования.
Видео
Оцените статью:
Формулы и уравнения синхронных, шаговых и двигателей переменного тока
Ниже приведены полезные уравнения и формулы для двигателей переменного тока при проектировании и анализе синхронных двигателей, шаговых двигателей и других связанных с ними машин переменного тока.
Содержание
Синхронная машина: Скорость синхронной машины: Синхронная машина предназначена для работы на синхронной скорости, которая определяется как:
, где
- N S – синхронная скорость
- F – частота напряжения линии
- P – это число полюсов в машине
 Мотор:
Мотор: V = E B + I A (R A + JX S )
, где
- V = напряжение
- E B = Back EMF
- E B 3 = Back EMF
- E B.0024
- I A = ток арматуры
- R A = Сопротивление якоря
- x S = синхронная реакция
E R = V – E b
E R = I a (R a + jX s )
Внутренний угол: Это угол, на который ток якоря I a отстает от результирующего напряжения в якоре E R , и определяется как;
E B = K A φ A N S
, где
- K A
, где
- K A
, где
- K A3 = 3
- 2
- K A3 = СВИС a = магнитный поток на полюс ротора
- N s = синхронная скорость ротора
Похожие сообщения:
- Однофазный асинхронный двигатель.
- E B = V Нормальное возбуждение Задержка коэффициента мощности
- E B Рукобавление Задержка коэффициента мощности
- E B > V Over- Extation Ведущий коэффициент мощности
- 2
Где
Φ угол между V и I a
Механическая мощность в роторе:
, где
- α – угол нагрузки между E B и V
- φ – это угол между V & I A
- T G IS GRESSBOURE CORTQUED
- 9911111111111111111111111111111111111111111111991111911111111111111111911111111111111119 гг.
 N s
N s
Похожие сообщения:
- Серводвигатель — типы, конструкция, работа, управление и применение
- Бесщеточный двигатель постоянного тока (BLDC) — строительство, работа и применение
Формулы шаговых двигателей
Угол шага:
Где
- β = угол шага, угол поворота вала при каждом импульсе.
- N s = количество полюсов или зубьев статора
- N r = количество полюсов или зубцов ротора по;
Чем выше разрешение, тем выше точность шагового двигателя. Скорость двигателя:, где
- n = скорость двигателя в революции в секунду
- F = Частота шаговых импульсов
Связанные формы и уравнения. Формулы и уравнения
- Формулы и уравнения трансформаторов
- Основные формулы и уравнения электротехники
- Формулы основных электрических величин
- Формулы мощности в однофазных и трехфазных цепях постоянного и переменного тока
- Формулы и уравнения в области электротехники и электроники
- Символы электродвигателей
Показать полную статью
Связанные статьи
Кнопка «Вернуться к началу»
двигатель – Количество полюсов, используемое для расчета синхронной скорости
спросил
Изменено 1 год, 2 месяца назад
Просмотрено 648 раз
\$\начало группы\$
Я немного запутался в формуле, используемой для определения синхронной скорости \$N_S\$.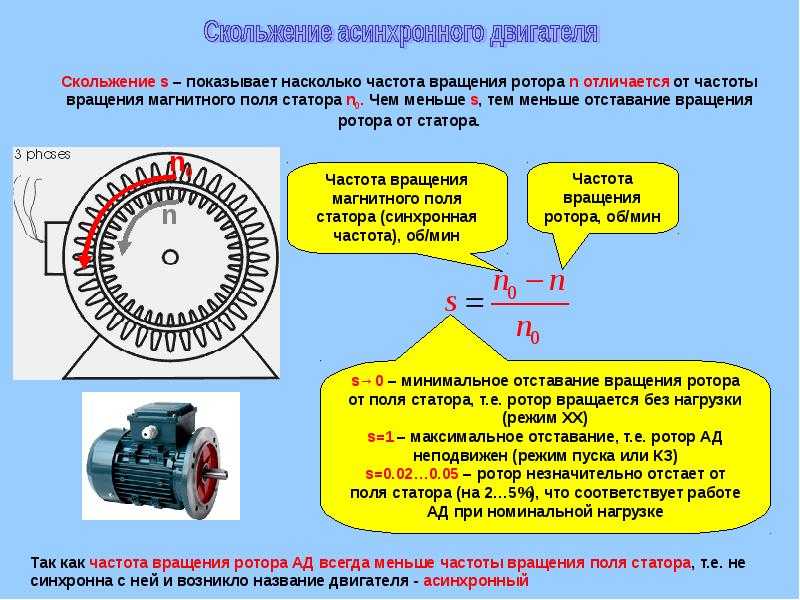
\$N_S = \frac{120f}{p}\$
Теперь для 6-полюсного двигателя есть несколько участков, где 6 сначала делится на 2, а затем получается ответ используется для \$p\$, и есть некоторые сайты, которые используют 6 для \$p\$. Может ли кто-нибудь устранить эту путаницу? Также влияет ли количество полюсов на разность фаз? Как и для 6-полюсного трехфазного двигателя, разность фаз будет 120 независимо от количества полюсов или будет 60?
- двигатель
- синхронный
- синхронный двигатель
\$\конечная группа\$
\$\начало группы\$
Наличие более одной обмотки и более одной фазы способствует образованию одного полюса. В трехфазном двигателе магнитные эффекты каждой из трех фазных обмоток складываются вместе, образуя каждый полюс. В фазе несколько распределенных обмоток могут быть частью фазы.
Наиболее часто используется формула, в которой p — количество полюсов, \$N_S = \frac{120f}{p}\$. В нескольких текстах или статьях, где p — количество пар полюсов, используется формула \$N_S = \frac{60f}{p}\$. Я полагаю, что из дюжины или около того моторных текстов, которые у меня есть, только в одном выполняются расчеты с парами полюсов. За 60 лет, что я изучаю или работаю с двигателями переменного тока, я очень редко сталкивался с расчетами с использованием пар полюсов.
\$\конечная группа\$
\$\начало группы\$
Кто-нибудь может прояснить эту путаницу?
Полюса фактически идут парами (полюса-пары). Вы должны учитывать, что машина с 6 числовыми полюсами на самом деле является машиной с 3 парами полюсов.
