Синхронная скорость – вращение – двигатель
Cтраница 1
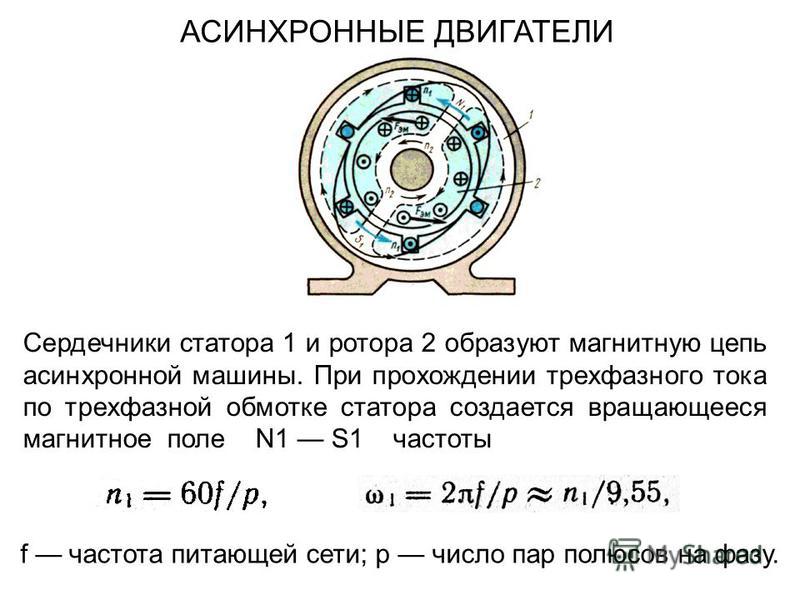
Синхронная скорость вращения двигателя обратно пропорциональна его числу пар полюсов [ см. формулу (9.1) ], что позволяет осуществлять ступенчатое регулирование скорости вращения путем изменения количества полюсов обмотки статора. [1]
Синхронная скорость вращения двигателя 1500 об / мин. [2]
Синхронная скорость вращения двигателя прямо пропорциональна частоте источника питания [ см. формулу (9.1) ], что позволяет осуществлять плавное и экономичное регулирование скорости вращения асинхронных двигателей с получением достаточно жестких механических характеристик, обладающих высокой перегрузочной способностью. Частотное регулирование наиболее эффективно для группового электропривода ( транспортные рольганги, конвейерные установки и пр. При этом скорость вращения двигателей может регулироваться как за счет увеличения, так и уменьшения частоты источника питания относительно номинальной частоты / ном 50 гц.
При достижении синхронной скорости вращения двигателя компрессора, отсутствии объективных показателей о перегрузке компрессора и помпажном режиме, проверяемых по контрольно-измерительным приборам, и отсутствии посторонних звуков машина переводится с пускового контура на – рабочий. [4]
| Схема переключения обмотки статора с последовательного соединения на параллельное.| Схемы переключения полюсов обмотки статора двухскоростного асинхронного двигателя. [5] |
Вследствие этого число пар полюсов уменьшается, а синхронная скорость вращения двигателя увеличивается в два раза. [6]
| Механическая характеристика асинхронного двигателя.| Механические характеристики двигателя с различным приведенным активным сопротивлением ротора. [7] |
На рис. 2.9 представлена механическая характеристика асинхронного двигателя, где S-nsn / nc – скольжение двигателя; / гс60 ftp – синхронная скорость вращения двигателя; р – число пар полюсов об-ыотки статора; Sm – критическое или опрокидывающее скольжение. [8]
[8]
| Кривые индукции в воздушном зазоре и средней линейной нагрузки статора однофазных асинхронных двигателей с расщепленными полюсами в зависимости от отношения полезной мощности к синхронной скорости вращения. [9] |
Индукция В6 и средняя линейная нагрузка AS однофазных асинхронных двигателей малой мощности с экранированными полюсами выбираются по кривым рис. 22.2 в зависимости от отношения полезной мощности к синхронной скорости вращения двигателя. [10]
Индукция В (, и средняя линейная нагрузка AS маломощных однофазных асинхронных двигателей с экранированными полюсами выбираются по кривым рис. 24.2 в зависимости от отношения полезной мощности к синхронной скорости вращения двигателя. [11]
Трехфазный асинхронный двигатель с фазным ротором вращается со скоростью гаг 480 об / мин. Определить число пар полюсов р и скольжение s, если синхронная скорость вращения двигателя nl 500 об / мин. [12]
[12]
Трехфазный асинхронный двигатель с фазным ротором вращается со скоростью п2480 об / мин. Определить число пар полюсов р и скольжение s, если синхронная скорость вращения двигателя п 500 об / мин. [13]
Если обмотку статора машины подключить к источнику переменного тока и одновременно магнитные полюса ротора возбудить постоянным током, то ротор начнет вращаться, и машина будет работать, как электрический двигатель. Частота, заданная источником, и число полюсов ротора определят синхронную скорость вращения двигателя. [14]
На щитке короткозамкнутого трехфазного асинхронного двигателя имеются следующие данные: 2 2 кет, 1440 об / мин, 220 / 380 в, 8 3 / 4 8 а. Определить число пар полюсов р двигателя, скольжение s и пусковой ток / 1П для случаев соединения обмоток статора треугольником и звездой при включении в сеть с напряжением U – 220 в, если кратность пускового тока для соединения треугольником равна 5 5, а синхронная скорость вращения двигателя nt – 1500 об / мин. [15]
[15]
Страницы: 1 2
Регулирование скорости асинхронного двигателя
Асинхронный двигатель
Долгое время в промышленности использовались нерегулируемые электроприводы на базе АД, но, в последнее время возникла надобность в
Частота вращения ротора равна
При этом, синхронная частота вращения зависит от частоты напряжения и числа пар полюсов
Исходя из этого, можно сделать вывод, что регулировать скорость АД можно с помощью изменения скольжения, частоты и числа пар полюсов.
Рассмотрим основные способы регулировки.
Регулирование скорости с помощью изменения активного сопротивления в цепи ротора
Этот способ регулирования скорости применим в двигателях с фазным ротором. При этом в цепь обмотки ротора включается реостат, которым можно плавно увеличивать сопротивление. С увеличением сопротивления, скольжение двигателя растёт, а скорость падает. Таким образом, обеспечивается регулировка скорости вниз от естественной характеристики.
С увеличением сопротивления, скольжение двигателя растёт, а скорость падает. Таким образом, обеспечивается регулировка скорости вниз от естественной характеристики.
Недостатком данного способа является его неэкономичность, так как при увеличении скольжения, потери в цепи ротора растут, следовательно, КПД двигателя падает. Плюс к этому, механическая характеристика двигателя становится более пологой и мягкой, из-за чего небольшое изменение момента нагрузки на валу, вызывает большое изменение частоты вращения.
Регулирование скорости данным способом не эффективно, но, несмотря на это применяется в двигателях с фазным ротором.
Регулирование скорости двигателя с помощью изменения напряжения питания
Данный способ регулирования можно осуществить, если включить в цепь автотрансформатор, перед статором, после питающих проводов. При этом, если снижать напряжение на выходе автотрансформатора, то двигатель будет работать на пониженном напряжении.
Способ регулирования изменением напряжения, возможен только вниз от естественной характеристики, так как увеличивать напряжение выше номинального нельзя, потому что это может привести к большим потерям в двигателе, перегреву и выходу его из строя.
Кроме автотрансформатора, можно использовать тиристорный регулятор напряжения.
Регулирование скорости с помощью изменения частоты питания
При данном способе регулирования, к двигателю подключается преобразователь частоты (ПЧ). Чаще всего это тиристорный преобразователь частоты.
При снижении частоты напряжения, перегрузочная способность двигателя будет падать, чтобы этого не допустить, требуется повысить величину напряжения U1. Значение на которое нужно повысить, зависит от того какой привод. Если регулирование производится с постоянным моментом нагрузки на валу, то напряжение нужно изменять пропорционально изменению частоты (при снижении скорости). При увеличении скорости этого делать не следует, напряжение должно оставаться на номинальном значении, иначе это может причинить вред двигателю.
Если регулирование скорости производится с постоянной мощностью двигателя (например, в металлорежущих станках), то изменение напряжения U1 необходимо производить пропорционально квадратному корню изменения частоты f
При регулировании установок с вентиляторной характеристикой, необходимо изменять подводимое напряжение U1 пропорционально квадрату изменения частоты f1.
Регулирование с помощью изменения частоты, является наиболее приемлемым вариантом для асинхронных двигателей, так как при нем обеспечивается регулирование скорости в широком диапазоне, без значительных потерь и снижения перегрузочных способностей двигателя.
Регулирование скорости АД изменением числа пар полюсов
Такой способ регулирования возможен только в многоскоростных асинхронных двигателях с короткозамкнутым ротором, так как число полюсов этого ротора, всегда равно количеству полюсов статора.
В соответствии с формулой, которая рассматривалась выше, скорость двигателя можно регулировать изменением числа пар полюсов. Причём, изменение скорости происходит ступенчато, так как количество полюсов принимают только определённые значения – 1,2,3,4,5.
Изменение количества полюсов достигается переключением катушечных групп статорной обмотки. При этом катушки соединяются различными схемами соединения, например “звезда – звезда” или “звезда – двойная звезда”. Первая схема соединения даёт изменение количества полюсов в соотношении 2:1. При этом обеспечивается постоянная мощность двигателя при переключении. Вторая схема изменяет количество полюсов в таком же соотношении, но при этом обеспечивает постоянный момент двигателя.
Первая схема соединения даёт изменение количества полюсов в соотношении 2:1. При этом обеспечивается постоянная мощность двигателя при переключении. Вторая схема изменяет количество полюсов в таком же соотношении, но при этом обеспечивает постоянный момент двигателя.
Применение данного способа регулирования оправдано сохранением КПД и коэффициента мощности при переключении. Минусом же является более сложная и увеличенная конструкция двигателя, а также увеличение его стоимости.
Читайте также – Торможение асинхронного двигателя
Что такое синхронная скорость? Связь между скоростью и частотой
Перейти к содержимому Синхронная скорость Когда на обмотку статора асинхронного двигателя подаются три фазы, разнесенные по электрическому напряжению на 120 градусов, создается вращающееся магнитное поле, которое вращается в пространстве и времени. Скорость вращающегося магнитного поля называется синхронной скоростью двигателя. Синхронная скорость обозначается как Ns. Синхронная скорость может быть выражена следующим математическим выражением.
Синхронная скорость обозначается как Ns. Синхронная скорость может быть выражена следующим математическим выражением.
Синхронная скорость двигателя зависит от;
Почему отношение V/f поддерживается постоянным в частотно-регулируемом приводе?
- Частота источника питания
- Количество полюсов двигателя
Синхронная скорость двигателя остается постоянной, если количество полюсов и частота остаются постоянными. Синхронную скорость двигателя можно изменить, изменив число полюсов или частоту. Машина, которая работает с синхронной скоростью, называется синхронной машиной.
Синхронная скорость двигателя с разным числом полюсов приведена ниже.
No. of Poles
|
Frequency (50 Hz) |
Frequency(60 Hz) | |
2 | 3000 | 3600 | |
4 | 1500 | 1800 | |
6 | 1000 | 1200 | |
8 | 750 | 9009 | 900 9000 |
10 | 600 | 720 | |
12 | 500 | 600 | |
16 | 375 | 450 | |
20 | |||
20 9000 | 300 | 360 |
Отношения между скоростью и частотой
6. На частоты, которые на частоты, на частоты, на частоты, на частоты, на частоты, на частоты, на частоты. За один полный цикл генерируемого напряжения пара полюсов поля проходит по катушке.
На частоты, которые на частоты, на частоты, на частоты, на частоты, на частоты, на частоты, на частоты. За один полный цикл генерируемого напряжения пара полюсов поля проходит по катушке.
Пусть скорость вращающегося магнитного поля равна N оборотов в минуту (об/мин).
n = N/60 оборотов в секунду
Оборот/оборот в секунду = f
За один полный цикл одна пара полюсов проходит через катушку. Следовательно, частота прохождения одной пары полюсов составляет N/60. За один полный цикл по катушке проходит P/2 полюса.
Количество полюсов в полном цикле
Частота прохождения полюсов за один цикл
Следовательно, для P полюсов частота равна;
Похожие сообщения
- Скорость скольжения в асинхронном двигателе
- Каково значение скольжения в асинхронном двигателе?
Похожие сообщения:
Пожалуйста, подпишитесь на нас и поставьте лайк:
Является ли номинальная скорость асинхронного двигателя синхронной скоростью?
Задавать вопрос
спросил
Изменено 5 лет, 8 месяцев назад
Просмотрено 25 тысяч раз
\$\начало группы\$
Например, если двигатель рассчитан на 50 Гц, 400 В, 22 А, 8,29 кВт и 1460 об/мин, означает ли это, что двигатель должен работать от источника с напряжением 50 Гц, и это соответствует синхронной скорости двигателя 1460 об/мин?
Причина, по которой я спрашиваю, заключается в том, что пример вопроса и ответа, который я видел, говорит следующее:
Q: Оцените количество полюсов описанного выше двигателя
A: формула для синхронной скорости: n=120f/p
ближайшая синхронная скорость для данного ротора составляет 1500 об/мин
1500=120*50/p
p=4
Я предполагаю, что они округлили 1460 до 1500 потому, что число полюсов должно быть целым числом.
Итак, когда вы видите двигатель с номинальной скоростью в об/мин, что на самом деле означает это значение? И как это связано с синхронной скоростью (как в моем примере вопроса)?
Спасибо!
- асинхронный двигатель
\$\конечная группа\$
2
\$\начало группы\$
Здесь вы видите асинхронный (асинхронный) двигатель. Отличие от синхронного заключается в том, что ротор обычно представляет собой (беличью) клетку и немного железа.
Для синхронного двигателя ротор имеет либо магнит, либо геометрически строго определенные (явнозаметные) полюса и зазоры между полюсами. Иногда бывает и то, и другое!
Почему один синхронный, а другой асинхронный?
- Синхронный двигатель имеет постоянное возбуждение в роторе (или имеет постоянную разность между индуктивностями). Поэтому поле вращается синхронно с ротором.
 $$f_{ротор}=0$$
$$f_{ротор}=0$$ - Асинхронный двигатель с другой стороны имеет индуцированное поле в роторе, которое зависит от скорости вращения. $$f_{ротор}>0$$
Скорость вращения рассчитывается по разности частот потоков статора и ротора.
Почему скорость 1460? Стабильная часть характеристики момента/скорости вращения для асинхронного двигателя близка к синхронной скорости. Если вы хотите найти количество полюсов, округлите его до ближайшей синхронной скорости вращения и вычислите его в обычном режиме. В некоторых специальных режимах работы это не так, так как асинхронный двигатель может работать, например, со скоростью 900 оборотов, если вы сделаете некоторые настройки. Однако в вашем случае он будет иметь p=4 .
Почитайте статьи в википедии или погуглите про асинхронные и синхронные двигатели.
\$\конечная группа\$
\$\начало группы\$
Асинхронный двигатель никогда не вращается с синхронной скоростью.
Двигатель, вращающийся с постоянной скоростью, должен создавать ускоряющий момент, достаточный для преодоления тормозящего момента нагрузки. Поскольку асинхронный двигатель должен проскальзывать, чтобы обеспечить крутящий момент, скорость при полной нагрузке всегда будет меньше синхронной скорости.
Даже ненагруженный двигатель, на валу которого ничего нет, все равно имеет тормозящий момент из-за трения в подшипниках и т.д.
Таким образом, имеем:
Номинальная скорость — скорость двигателя при номинальной выходной (на валу) мощности.
Скорость холостого хода — скорость двигателя без нагрузки на валу. Обратите внимание, что подшипники двигателя по-прежнему создают номинальную нагрузку из-за трения.
Синхронная скорость — скорость вращения двигателя при абсолютно нулевой нагрузке (подшипники качения и никаких других потерь).
Связанный: Что означает скорость регулирования?
Для справки, вот типичный график характеристик двигателя.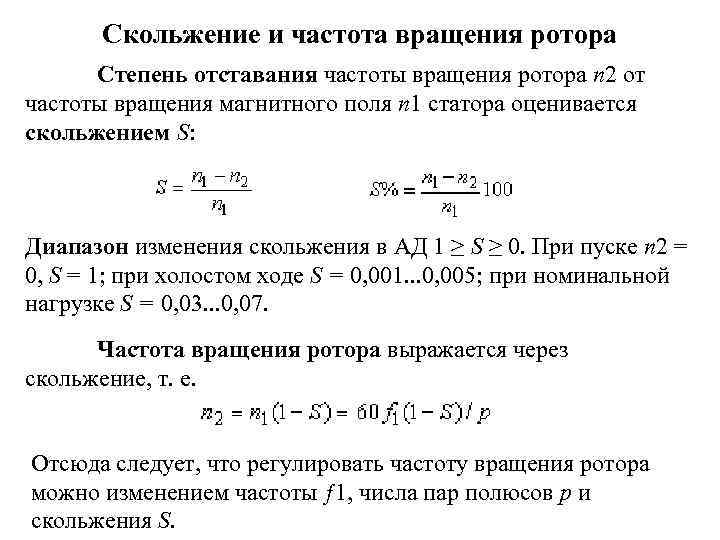
Обратите внимание на синхронную скорость 3000 об/мин, скорость без нагрузки также около 3000 об/мин и скорость при полной нагрузке 2932 об/мин.
\$\конечная группа\$
2
\$\начало группы\$
В асинхронном двигателе синхронная скорость (Ns) — это просто число, которое можно рассчитать по определенной формуле: Ns=120*f(частота подаваемого напряжения)/полюс. Но Номинальная рабочая скорость двигателя будет указана в об/мин (оборотов в минуту) и представляет собой скорость, с которой двигатель будет вращаться при выработке номинальной мощности и подаче номинального напряжения.
Это значение будет немного меньше синхронной скорости двигателя из-за снижения скорости при добавлении нагрузки. На приведенной табличке указана номинальная скорость 1460 об/мин для этого 4-полюсного двигателя с частотой 50 Гц.