
Синхронный двигатель: принцип работы, устройство, назначение
Синхронные электродвигатели (СД) не так распространены, как асинхронные с короткозамкнутым ротором. Но используются там, где нужен большой крутящий момент и в процессе работы будут происходить частые перегрузки. Также такой тип двигателей используются там, где нужна большая мощность, чтобы приводить в движение механизмы, благодаря высокому коэффициенту мощности и возможности улучшать коэффициент мощности сети, что существенно снизит затраты на электроэнергию и нагрузку на линии. Что такое синхронный двигатель, где он используется и какие у него плюсы минусы мы рассмотрим в этой статье.
Определение и принцип действия
Если говорить простым языком, то синхронным называют электродвигатель, у которого скорость вращения ротора (вала) совпадает со скоростью вращения магнитного поля статора.
Кратко рассмотрим принцип действия такого электродвигателя — он основан на взаимодействии вращающегося магнитного поля статора, которое обычно создаётся трёхфазным переменным током и постоянного магнитного поля ротора.
Постоянное магнитное поле ротора создаётся за счет обмотки возбуждения или постоянных магнитов. Ток в обмотках статора создаёт вращающееся магнитное поле, тогда как ротор в рабочем режиме представляет собой постоянный магнит, его полюса устремляются к противоположным полюсам магнитного поля статора. В результате ротор вращается синхронно с полем статора, что и является его основной особенностью.
Напомним, что у асинхронного электродвигателя скорость вращения МП статора и скорость вращения ротора отличаются на величину скольжения, а его механическая характеристика «горбатая» с пиком при критическом скольжении (ниже его номинальной скорости вращения).
Скорость, с которой вращается магнитное поле статора, может быть вычислена по следующему уравнению:
N=60f/p
f – частота тока в обмотке, Гц, p – количество пар полюсов.
Соответственно по этой же формуле определяется скорость вращения вала синхронного двигателя.
Большинство электродвигателей переменного тока, используемых на производстве, выполнены без постоянных магнитов, а с обмоткой возбуждения, тогда как маломощные синхронные двигатели переменного тока выполняются с постоянными магнитами на роторе.
Ток к обмотке возбуждения подводится за счет колец и щеточного узла. В отличие от коллекторного электродвигателя, где для передачи тока вращающейся катушке используется коллектор (набор продольно расположенных пластин), на синхронном установлены кольца поперек одного из концов статора.

Источником постоянного тока возбуждения в настоящее время являются тиристорные возбудители, часто называемые «ВТЕ» (по названию одной из серий таких устройств отечественного производства). Ранее использовалась система возбуждения «генератор-двигатель», когда на одном валу с двигателем устанавливали генератор (он же возбудитель), который через резисторы подавал ток в обмотку возбуждения.
Ротор почти всех синхронных двигателей постоянного тока выполняется без обмотки возбуждения, а с постоянными магнитами, они хоть и похожи по принципу действия на СД переменного тока, но по способу подключения и управления ими очень сильно отличаются от классических трёхфазных машин.
Одной из основных характеристик электродвигателя является механическая характеристика. Она у синхронных электродвигателей приближена к прямой горизонтальной линии. Это значит, что нагрузка на валу не влияет на его обороты (пока не достигнет какой-то критической величины).

Ниже вы видите условное обозначение на схеме синхронной машины.

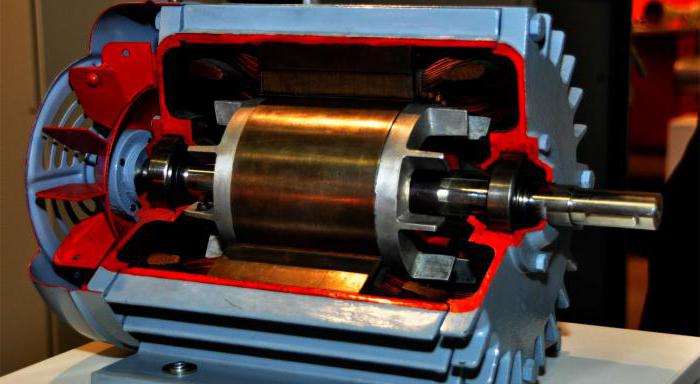
Конструкция ротора
Как и любой другой, синхронный электродвигатель состоит из двух основных частей:
- Статор. В нём расположены обмотки. Его еще называют якорем.
- Ротор. На нём устанавливают постоянные магниты или обмотку возбуждения. Его также называют индуктором, из-за его предназначения — создавать магнитное поле).
Для подачи тока в обмотку возбуждения на роторе устанавливают 2 кольца (так как возбуждение постоянным током, на одно из них подают «+», а на другое «—»). Щетки закреплены на щеткодержателе.

Роторы у синхронных электродвигателей переменного тока бывают двух типов, в зависимости от назначения:
- Явнополюсные. Четко видны полюса (катушки). Используют при малых скоростях и большом числе полюсов.
- Неявнополюсные – выглядит как круглая болванка, в прорези на которой уложены провода обмоток. Используют при больших скоростях вращения (3000, 1500 об/мин) и малом числе полюсов.

Пуск синхронного двигателя
Особенностью этого вида электрических машин является то, что его нельзя просто подключить к сети и ожидать его запуска. Кроме того, что для работы СД нужен не только источник тока возбуждения, у него и достаточно сложная схема пуска.

Запуск происходит как у асинхронного двигателя, а для создания пускового момента кроме обмотки возбуждения на роторе размещают и дополнительную короткозамкнутую обмотку «беличью клетку». Её еще называют «демпфирующей» обмоткой, потому что она повышает устойчивость при резких перегрузках.
Ток возбуждения в обмотке ротора при пуске отсутствует, а когда он разгоняется до подсинхронной скорости (на 3-5% меньше синхронной), подаётся ток возбуждения, после чего он и ток статора совершает колебания, двигатель входит в синхронизм и выходит на рабочий режим.
Для ограничения пусковых токов мощных машин иногда уменьшают напряжение на зажимах обмоток статора, подключив последовательно автотрансформатор или резисторы.
Пока синхронная машина запускается в асинхронном режиме к обмотке возбуждения подключаются резисторы, сопротивление которых превышает сопротивление самой обмотки в 5 — 10 раз. Это нужно чтобы пульсирующий магнитный поток, возникающий под действием токов, наводимых в обмотке при пуске, не замедлял разгон, а также чтобы не повредить обмотки из-за индуцируемыми в ней ЭДС.
Виды
Видов таких машин очень много, выше была описана конструкция синхронного электродвигателя переменного тока с обмотками возбуждения, как самого распространенного на производстве. Есть и другие типы, такие как:
- Синхронные двигатели с постоянными магнитами. Это различные электродвигатели, такие как PMSM – permanent magnet synchronous motor, BLDC – Brushless Direct Current и прочие. Отличия, между которыми, состоят в способе управления и форме тока (синусоидальная или трапецивиденая). Их еще называют бесколлекторными или бесщеточными двигателями. Используются в станках, радиоуправляемых моделях, электроинструменте и т.д. Они работают не напрямую от постоянного тока, а через специальный преобразователь.
- Шаговые двигатели — синхронные бесщеточные двигатели, у которых ротор точно удерживает заданное положение, их используют для позиционирование рабочего инструмента в ЧПУ станках и для управления различными элементами автоматических систем (например, положение дроссельной заслонки в автомобиле). Состоят из статора, в этом случае на нём расположены обмотки возбуждения, и ротора, который выполнен из магнито-мягкого или магнито-твёрдого материала. Конструктивно очень похожи на предыдущие типы.
- Реактивные.
- Гистерезисные.
- Реактивно-гистерезисные.
Последние три типа СД также не имеют щеток, они работают за счет особой конструкции ротора. У реактивных СД различают три их конструкции: поперечно-расслоенный ротор, ротор с явновыраженными полюсами и аксиально-расслоенный ротор. Объяснение принципа их работы достаточно сложно, и займет большой объём, поэтому мы опустим его. Такие электродвигатели на практике вы, скорее всего, встретите нечасто. В основном это маломощные машины, используемые в автоматике.

Сфера применения
Синхронные двигатели стоят дороже чем асинхронные, к тому же требуют дополнительного источника постоянного тока возбуждения – это отчасти снижает ширину области применения этого вида электрических машин. Однако, синхронные электродвигатели используют для привода механизмов, где возможны перегрузки и требуется точное поддерживание стабильных оборотов.

При этом чаще всего используются в области больших мощностей — сотен киловатт и единиц мегаватт, и, при этом, пуск и остановка происходят достаточно редко, то есть машины работают круглосуточно долгое время. Такое применение обусловлено тем, что синхронные машины работают с cosФи приближенном к 1, и могут выдавать реактивную мощность в сеть, в результате чего улучшается коэффициент мощности сети и снижается её потребление, что важно для предприятий.
Преимущества и недостатки
Если говорить простыми словами, то у любой электрической машины есть свои плюсы и минусы. У синхронного двигателя положительными сторонами является:
- Работа с cosФи=1, благодаря возбуждению постоянным током, соответственно они не потребляют реактивной мощности из сети.
- При работе, с перевозбуждением отдают реактивную мощность в сеть, улучшая коэффициент мощности сети, падение напряжения и потери в ней и повышается КМ генераторов электростанциях.
- Максимальный момент, развиваемый на валу СД, пропорционален U, а у АД — U² (квадратичная зависимость от напряжения). Это значит, что у СД хорошая нагрузочная способность и устойчивость работы, которые сохраняются при просадке напряжения в сети.
- В следствие всего этого скорость вращения стабильна при перегрузках и просадках, в пределах перегрузочной способности, особенно при повышении тока возбуждения.
Однако существенным недостатком синхронного двигателя является то, что его конструкция сложнее, чем у асинхронных с КЗ-ротором, нужен возбудитель, без которого он не сможет работать. Всё это приводит к большей стоимости по сравнению с асинхронными машинами и сложностями в обслуживании и эксплуатации.
Пожалуй, на этом достоинства и недостатки синхронных электродвигателей заканчиваются. В этой статье мы постарались кратко изложить общие сведения о синхронных электродвигателях. Если у вас есть чем дополнить материал – пишите в комментариях.
Материалы по теме:
samelectrik.ru
принцип, теория работы и применение
Мы узнали о различных типах электродвигателей в нашей предыдущей статье. Теперь мы начнем узнавать об этих моторах индивидуально. В этой статье мы рассмотрим теорию работы синхронного двигателя и его строение, а так же подскажем где вы можете купить.
Принцип синхронного двигателя
Основной принцип такой же, как и для всех двигателей. Это взаимная индукция между обмоткой статора и ротора, которая делает любой двигатель работоспособным. Кроме того, когда 3-фазная обмотка питается от 3-фазного источника питания, то создается магнитный поток постоянной величины, но вращающийся с синхронной скоростью.

Чтобы легко понять работу синхронного двигателя, давайте рассмотрим только два полюса в статоре и роторе. Как показано на рисунке, статор имеет два полюса Ns и S. Эти полюса, находясь под напряжением, создают вращающееся магнитное поле. Они вращаются с синхронной скоростью и позволяют считать направление вращения по часовой стрелке. Если полюса ротора находятся в положении, показанном на рисунке, то полюса отталкиваются друг от друга. Итак, северный полюс в статоре отталкивает северный полюс ротора. Также южный полюс статора отталкивает юг ротора. Это заставляет ротор вращаться в направлении против часовой стрелки. Таким образом, через полпериода полюса статора меняются местами, что приводит их в положение противоположенных полюсов, которые притягивают друг друга . Т.е. южный полюс статора и северный полюс ротора притягиваются и магнитно сцепляются.

В этом положении полюсы Ns притягивают S, а полюсы Ss притягивают N. Эти противоположные полюса ротора и статора начинают вращаться в том же направлении, что и полюса статора. Это заставляет ротор вращаться в одном направлении и с синхронной скоростью, которая равна скорости вращения полюсов статора. Таким образом, поскольку положение полюсов статора продолжает изменяться с быстрой скоростью и реверсированием, полюса ротора также вращаются и поворачиваются так же, как и статор, таким образом вызывая вращение ротора с постоянной, синхронной скоростью и в том же направлении. Приобрести синхронный двигатель можно, перейдя по ссылке ниже:

Теория работы
Когда на двигатель подается питание переменного тока, полюса статора находятся под напряжением. Это, в свою очередь, притягивает полюса ротора, таким образом, полюса статора и ротора магнитно блокируются. Именно эта блокировка заставляет ротор вращаться с одинаковой синхронной скоростью с полюсами статора. Синхронная скорость вращения задается выражением Ns = 120f / P.
Когда нагрузка на двигатель постепенно увеличивается, ротор, несмотря на то, что он вращается с одинаковой скоростью, имеет тенденцию постепенно снижаться по фазе на некоторый угол, «β», называемый Угол нагрузки или Угол сцепления. Этот угол нагрузки зависит от величины нагрузки, на которую рассчитан двигатель. Другими словами, мы можем интерпретировать, как развиваемый двигателем крутящий момент зависит от угла нагрузки «β».

Электрическую работу синхронного двигателя можно сравнить с передачей мощности механическим валом. На рисунке показаны два шкива, «A» и «B». Предполагается, что шкив «A» и шкив «B» установлены на одном валу. «А» передает мощность от привода через вал, в свою очередь заставляя «В» вращаться, передавая мощность нагрузке.

Два шкива, которые прикреплены к одному валу, можно сравнить с блокировкой между полюсами статора и ротора.
Если нагрузка увеличивается, шкив «B» передает увеличение нагрузки на вал, что проявляется в скручивании вала.
Таким образом, поворот вала можно сравнить с ротором, падающим по фазе со статором.
Угол кручения можно сравнить с углом нагрузки «β». Также, когда нагрузка увеличивается, сила скручивания и угол закручивания увеличиваются. Таким образом, угол нагрузки «β» также увеличивается.
Если нагрузка на шкив «B» увеличивается до такой степени, что он заставляет вал крутиться и ломаться, то передача мощности через вал прекращается, когда вал ломается. Это можно сравнить с ротором, выходящим из синхронизма с полюсами статора.
Таким образом, синхронные двигатели могут работать либо с синхронной скоростью, либо они останавливаются.
Процедура запуска двигателя
Все синхронные двигатели оснащены «обмоткой короткозамкнутого ротора», состоящей из медных прутков, закороченных на обоих концах. Эти обмотки также служат для самостоятельного запуска синхронного двигателя. Во время запуска он легко запускается и действует как асинхронный двигатель. Для запуска синхронного двигателя сетевое напряжение подается на клеммы статора, а ротор остается не возбужденным. Он запускается как асинхронный двигатель, и когда он достигает скорости около 95% от своей синхронной скорости, на ротор подается слабое постоянное возбуждение. В результате чего ротор выравнивается синхронно со статором. В этот момент статор и полюса ротора сцепляются друг с другом и приводят двигатель в синхронность.
Фазовые колебания
Раскачка фазы синхронного двигателя вызваны:
- Различными нагрузками
- Пульсирующими частотами питания.
Когда синхронный двигатель нагружен (например, компрессоры, насосы и т.д.). Когда нагрузка увеличивается, его ротор возвращается назад на угол соединения «β». При дальнейшем увеличении нагрузки этот угол «β» дополнительно увеличивается, чтобы справиться с возросшей нагрузкой. В этой ситуации, если нагрузка внезапно уменьшается, ротор перегружается, а затем оттягивается, чтобы приспособить новую нагрузку к двигателю. Таким образом, ротор начинает колебаться, как маятник, в своем новом положении, соответствующем его новой нагрузке, пытаясь восстановить равновесие. Если период времени этих колебаний совпадает с собственной частотой станка, то устанавливается резонанс, что может вывести машину из синхронизма. Для демпфирования таких колебаний используются «демпфирующие решетки», известные как «обмотки короткозамкнутых клеток».
Применение синхронных двигателей:
- Эти двигатели используются как первичные двигатели (приводы) для центробежных насосов, поршневых компрессоров с ременным приводом, воздуходувок, бумажных фабрик, резиновых фабрик и т.д. Из-за их высокой эффективности и высоких скоростей (об / мин выше 600).
- Низкоскоростные синхронные двигатели (об / мин ниже 600) широко используются для привода многих поршневых насосов. Таких как винтовые и шестеренные насосы, вакуумные насосы, дробилки, машины для прокатки алюминиевой фольги.
- Эти моторы также широко используются на борту судов. Навигационное оборудование корабля, такое как гирокомпас, использует специальный тип синхронного двигателя. Они также используются в качестве первичных двигателей для Viscometer. Это устройства для измерения / регулирования вязкости мазута главного двигателя.
- Большинство фабрик и производств используют бесконечное количество индуктивных нагрузок. Они могут варьироваться от ламповых ламп до мощных асинхронных двигателей. Таким образом, эти индуктивные нагрузки имеют значительный коэффициент мощности отставания. Синхронный двигатель с избыточным возбуждением (синхронный конденсатор), имеющий ведущий коэффициент мощности, используется для улучшения коэффициента мощности этих систем питания.
- Эти двигатели также используются для регулирования напряжения, когда происходит сильное падение / повышение напряжения. Так же когда тяжелая индуктивная нагрузка включается / выключается в конце длинных линий электропередачи.
- Синхронные двигатели могут работать на сверхнизких скоростях с помощью мощных электронных преобразователей, которые генерируют очень низкие частоты. Примерами этих двигателей являются диапазоны мощностью 10 МВт, используемые для привода дробилок, вращающихся печей и шаровых мельниц с регулируемой скоростью.
meanders.ru
Синхронные двигатели — принцип работы, конструкции
Все электродвигатели построены на одном и том же принципе взаимодействия магнитных полей. Катушка с сердечником из ферромагнитного материала оказывает заметное механическое воздействие на другую аналогичную катушку. Разноименные полюсы соленоидов притягиваются, а одноименные — отталкиваются.
Поэтому в двигателе должно быть пространственное перемещение полюсов магнитного поля, создаваемое одной его частью. А другая часть движка создает свои полюсы и откликается вращением на пространственное перемещение полюсов. Она может содержать как постоянные магниты, так и катушки с сердечником. Далее расскажем о том, как магнитные поля функционируют в синхронных двигателях, а также предоставим другую информацию об этих машинах.
Конструктивные особенности
Синхронный двигатель содержит
- часть конструкции, в которой создается перемещающееся магнитное поле, называемую статором;
- часть двигателя, которая вращается от воздействия магнитного поля, называемую ротором;
- провод, соединяющий движок с источником питания, который сравнивают с якорной цепью корабля. Чтобы указать на ту часть двигателя, которая присоединена к проводу, ее называют якорем. В рассматриваемой машине питающий провод присоединен к статору. Следовательно, это якорь.
 Составные частит синхронных двигателей
Составные частит синхронных двигателейЧем больше витков содержат взаимодействующие катушки, тем меньший ток потребуется для эффективной работы движка. Но сила тока — это не самая сложная проблема. Главное — создать пространственное перемещение магнитного поля, что весьма непросто.
По этой причине синхронный двигатель появился только после того, как заработал первый генератор. Его создал в 1891 г. М.О. Доливо-Добровольский. Обратимость электрических машин позволяет использовать их и генераторами, и двигателями. Обратима и синхронная машина. Но для движков существуют определенные конструктивные ограничения, которых нет у генераторов.
Принцип работы
Для получения направления вращения статор двигателя должен содержать как минимум две катушки. Только в такой конструкции можно создать направленное перемещение магнитного поля. Это определяет устройство и принцип работы многих электродвигателей, питаемых от сети. Для нормальной работы синхронной машины, если это генератор, статор может содержать только одну катушку и быть источником ЭДС. Его ротор вращается принудительно. При этом, независимо от направления вращения, на клеммах статора появится переменное напряжение.
Но если такой генератор используется как двигатель, направление вращения его ротора может быть в обе стороны.
Оно будет определяться
- либо положением ротора в момент подачи напряжения на клеммы статора;
- либо принудительно направлением стартового вращения.
Конструкцию большинства электрических машин в основном определяет система электроснабжения, с которой они связаны. В наши дни первичными источниками ЭДС являются трехфазные генераторы. Эти машины создают трехфазное напряжение. Оно позволяет непосредственно получать перемещающееся магнитное поле. Без него синхронные двигатели переменного тока не могут работать, так же, как и асинхронные движки.
Для этого используются три или две фазы, питающие обмотки статора движка. Устройство синхронного двигателя должно соответствовать схеме электропитания. Наилучший результат получается при трехфазной конструкции статора. В этом случае магнитное поле получается вращающимся. По этой причине трехфазный синхронный двигатель является наиболее эффективным, если его сравнивать с аналогами, но при меньшем числе фаз.
Электромагнитные процессы и вращение
Намагниченный ротор тянется за полем статора и поэтому вращается синхронно с ним. В этом и состоит принцип действия синхронного двигателя. Магнитный поток в теле ротора в основном определяет крутящий момент на вале движка. Чем больше магнитный поток, тем больше крутящий момент. При этом независимо от нагрузки на вал (в определенных пределах) его скорость вращения не изменяется. Меняется только взаимное положение полей статора и ротора, но не скорости вращения.
По мере увеличения нагрузки на вал полюсы ротора оказываются все больше позади поля статора. Число n оборотов в минуту ротора рассматриваемого двигателя зависит от того, сколько пар полюсов p у статора. Если он запитан переменным напряжением с частотой f , используется формула
 Формула
ФормулаВ результате изменения положения ротора под нагрузкой уменьшается магнитный поток в сердечнике статора. Вследствие этого ток статора увеличивается и компенсирует уменьшение магнитного потока, противодействуя нагрузке на вале движка. Аналогичные процессы происходят в нагружаемом трансформаторе. Полюсы статора и ротора все больше удаляются друг от друга по мере увеличения нагрузки. Но частота оборотов остается неизменной до определенного момента.
Как только электромагнитные параметры конструкции статора оказываются меньше некоторого предельного значения, ротор останавливается. Время до полной остановки определяет привод, использующий синхронный электродвигатель. Конструкция ротора без специальных технических решений не позволяет получить крутящий момент за счет скольжения, как в асинхронном двигателе. То же самое получится, когда синхронные двигатели запускаются — скольжение отсутствует.
Но конструкция, в которой много пар полюсов и медленное вращение ротора, может быть исключением. На самостоятельный пуск движка влияет масса ротора и скорость перемещения поля статора мимо ротора. Обычно сила их взаимодействия может преодолеть инерцию ротора. Но после принудительной раскрутки тем или иным способом. Только при этих стартовых условиях возможна работа синхронного двигателя. Начальная скорость для входа в синхронизм обычно близка к параметрам вращающегося магнитного поля статора.
Разновидности движков
Конструкция ротора и принцип действия синхронной машины-двигателя напрямую связана
- с мощностью, которую надо создать на его вале,
- необходимой для этого величиной магнитного потока,
- параметрами напряжения питания статора.
Устройство синхронных машин небольшой мощности получается более простым при изготовлении магнитного ротора из специальных материалов. Так же применяется явно полюсный ротор с малой начальной намагниченностью. В результате получаются конструкции с постоянными магнитами, а также гистерезисные и синхронные реактивные двигатели. На статор этих движков подается переменное напряжение. Число фаз и частота соответствуют конструкции двигателя. В однофазных движках может быть использован конденсатор, через который подключается одна из двух обмоток статора. Но может быть применена схема из показанных далее вариантов.
 Варианты устройства синхронных двигателей
Варианты устройства синхронных двигателей Разновидности роторов
Разновидности роторов Принцип работы ротора
Принцип работы ротора Один из вариантов конструкции двигателя
Один из вариантов конструкции двигателя Ротор с постоянными магнитами
Ротор с постоянными магнитами Гистерезисный движок
Гистерезисный движок
 Три разновидности конструкции ротора реактивного двигателя
Три разновидности конструкции ротора реактивного двигателя
Гистерезисный движок похож на синхронный реактивный двигатель. Эти синхронные машины переменного тока характеризует одинаковый принцип действия. Его определяет магнитное поле статора, намагничивающее ротор. Гистерезисный движок и синхронный реактивный электродвигатель своей надежностью не уступают асинхронным двигателям. Однако роторы этих синхронных машин всегда бывают существенно дороже роторов асинхронных движков.
С целью получения максимального силового взаимодействия и больших по величине крутящих моментов в роторе используется принцип электромагнита. При этом его называют индуктором с обмоткой возбуждения. Для ее питания применяется постоянное напряжение, которое подается на щетки. Они расположены на статоре и скользят по кольцам, установленным на роторе. Через эту пару скользящих контактов течет постоянный ток возбуждения.
 Классический движок с индуктором
Классический движок с индукторомТакое классическое устройство синхронной машины существует и в наши дни, но преимущественно в наиболее мощных моделях. Для запуска движков обычно используются конструктивные решения со скольжением магнитных полей, характерные для асинхронных двигателей. При наличии индуктора для этого достаточно накоротко замкнуть щетки. В синхронных электрических машинах движки без щеток в роторе делаются с пусковыми обмотками типа беличьей клетки. Могут быть иные конструктивные решения для асинхронного старта.
Важной особенностью рассматриваемых двигателей, питаемых переменным напряжением, является их польза при работе без механической нагрузки или при ее небольшой величине. В таком режиме работы при небольшом возбуждении реактивная мощность из сети потребляется, а при значительном — отдается в сеть. Тем самым увеличивается эффективность электроснабжения. Для этой цели делаются специальные движки, называемые синхронными компенсаторами.
 Движки-компенсаторы на подстанции
Движки-компенсаторы на подстанцииРазвитие полупроводниковых приборов позволило создавать вращающееся магнитное поле путем преобразования постоянного напряжения. Очевидно то, что такое техническое решение расширило возможности управления электрическими двигателями. Регулирование частоты питающего напряжения и бесконтактный индуктор — это главные достижения полупроводниковых моделей. Но при этом существуют ограничения, определяемые возможностями электронных ключей.
По этой причине наиболее мощные из всех существующих движков по-прежнему являются трехфазными индукторными конструкциями со щетками и кольцами.
Похожие статьи:domelectrik.ru
Синхронный электродвигатель: характеристики, устройство и принцип действия
Синхронный электродвигатель – это устройство, преобразующее электрическую энергию в механическую. Его также можно использовать в качестве генератора. Чаще всего он применяется в компрессорах, прокатных станках, поршневых насосах и другом подобном оборудовании. Рассмотрим принцип действия синхронного электродвигателя, его характеристики и свойства.
Устройство синхронного электродвигателя
Строение агрегата данного вида типично. Двигатель состоит из:
- Неподвижной части (якорь или статор).
- Подвижной части (ротор или индуктор).
- Вентилятора.
- Контактных колец.
- Щеток.
- Возбудителя.
Статор представляет собой сердечник, состоящий из обмоток, который заключен в корпус. Индуктор комплектуется электромагнитами постоянного тока (полюсами). Конструкция индуктора может быть двух видов – явнополюсная и неявнополюсная. В статоре и роторе расположены ферромагнитные сердечники, изготовленные из специальной электротехнической стали. Они необходимы для уменьшения магнитного сопротивления и улучшения прохождения магнитного потока.
Частота вращения ротора в синхронном двигателе равна частоте вращения магнитного поля. Независимо от подключаемой нагрузки частота ротора неизменна, так как число пар полюсов магнитного поля и ротора совпадают. Их взаимодействие обеспечивает постоянную угловую скорость, не зависящую от момента, приложенного к валу.
Принцип работы синхронного электродвигателя
Самые распространенные типы такого рода агрегатов – однофазный и трехфазный. Принцип работы синхронного электродвигателя в обоих случаях примерно одинаков. После подключения обмотки якоря к сети ротор остается неподвижным, в то время как постоянный ток поступает в обмотку возбуждения. Направление электромагнитного момента меняется дважды за время одного изменения напряжения. При значении среднего момента равном нулю, ротор под влиянием внешнего момента (механического воздействия) разгоняется до частоты, близкой по значению частоте вращения магнитного поля в зазоре, после чего двигатель переходит в синхронный режим.
В трехфазном устройстве проводники расположены под определенным углом относительно друг друга. В них возбуждается вращающееся с синхронной скоростью электромагнитное поле.
Разгон двигателя может осуществляться в двух режимах:
- Асинхронный. Обмотки индуктора замыкаются с помощью реостата. Вращающееся магнитное поле, возникающее при включении напряжения, пересекает короткозамкнутую обмотку, установленную на роторе. В ней индуцируются токи, взаимодействующие с вращающимся полем статора. По достижении синхронной скорости крутящий момент начинает уменьшаться и сводится к нулю после замыкания магнитного поля.
- С помощью вспомогательного двигателя. Для этого синхронный двигатель механически соединяется со вспомогательным (двигателем постоянного тока либо трехфазным индукционным двигателем). Постоянный ток подается только после того, как вращение двигателя достигает скорости, близкой к синхронной. Магнитное поле замыкается, и связь со вспомогательным двигателем прекращается.
Характеристики синхронного электродвигателя
Хотя асинхронные двигатели считаются более надежными и дешевыми, их синхронные «собратья» имеют некоторые преимущества и широко применяются в различных областях промышленности. К отличительным характеристикам синхронного электродвигателя можно отнести:
- Работу при высоком значении коэффициента мощности.
- Высокий КПД по сравнению с асинхронным устройством той же мощности.
- Сохранение нагрузочной способности даже при снижении напряжения в сети.
- Неизменность частоты вращения независимо от механической нагрузки на валу.
- Экономичность.
Синхронным двигателям также присущи некоторые недостатки:
- Достаточно сложная конструкция, делающая их производство дороже.
- Необходимость источника постоянного тока (возбудителя или выпрямителя).
- Сложность пуска.
- Необходимость корректировать угловую частоту вращения путем изменения частоты питающего напряжения.
Однако в некоторых случаях использование синхронных двигателей предпочтительнее:
- Для улучшения коэффициента мощности.
- В длительных технологических процессах, где нет необходимости в частых запусках и остановках.
Таким образом, «плюсы» двигателей такого типа значительно превосходят «минусы», поэтому на данный момент они высоко востребованы.
Изучив синхронный двигатель, устройство и принцип его действия и учтя условия, в которых он будет эксплуатироваться, вы сможете быстро и с легкостью подобрать оптимально подходящий для ваших целей тип агрегата (защищенный, закрытый, открытый) и использовать его с максимальной эффективностью.
www.szemo.ru
Устройство и принцип действия синхронного двигателя
Принцип действия синхронного двигателя примерно такой же, как и у асинхронного. Но есть несколько отличий, которые имеют ключевое значение при выборе мотора для той или иной конструкции. В промышленности получили широкое распространение асинхронные машины – их доля достигает 96% от общего количества электрических двигателей. Но это вовсе не говорит о том, что отсутствуют другие типы электрических агрегатов.
Отличие от асинхронного мотора
Главное отличие синхронной машины заключается в том, что скорость вращения якоря такая же, как и аналогичная характеристика магнитного потока. И если в асинхронных моторах используется короткозамкнутый ротор, то в синхронных имеется на нем проволочная обмотка, к которой подводится переменное напряжение. В некоторых конструкциях используются постоянные магниты. Но это делает двигатель дороже.

Если увеличивать нагрузку, подключаемую к ротору, частота вращения его не изменится. Это одна из ключевых особенностей такого типа машин. Обязательное условие – у движущегося магнитного поля должно быть столько же пар полюсов, сколько у электромагнита на роторе. Именно это гарантирует постоянную угловую скорость вращения этого элемента двигателя. И она не будет зависеть от момента, приложенного к нему.
Конструкция мотора
Устройство и принцип действия синхронных двигателей несложны. Конструкция включает в себя такие элементы, как:
- Неподвижная часть – статор. На ней находится три обмотки, которые соединяются по схеме «звезда» или «треугольник». Статор собран из пластин электротехнической стали с высокой степенью проводимости.
- Подвижная часть – ротор. На нем тоже имеется обмотка. При работе на нее подается напряжение.
Между ротором и статором имеется прослойка воздуха. Она обеспечивает нормальное функционирование двигателя и позволяет магнитному полю беспрепятственно воздействовать на элементы агрегата. В конструкции присутствуют подшипники, в которых вращается ротор, а также клеммная коробка, расположенная в верхней части мотора.
Как работает двигатель
Если кратко, принцип действия синхронного двигателя, как и любого другого, заключается в преобразовании одного вида энергии в другой. А конкретно – электрической в механическую. Работает мотор таким образом:
- На статорные обмотки подается переменное напряжение. Оно создает магнитное поле.
- На обмотки ротора также подается переменное напряжение, создающее поле. Если используются постоянные магниты, то это поле уже по умолчанию имеется.
- Два магнитных поля взаимопересекаются, противодействуют друг другу – одно толкает другое. Из-за этого двигается ротор. Именно он установлен на шарикоподшипниках и способен свободно вращаться, дать ему нужно только толчок.
Вот и все. Теперь остается только использовать полученную механическую энергию в нужных целях. Но требуется знать, как правильно вывести в нормальный режим синхронный двигатель. Принцип работы у него отличается от асинхронного. Поэтому требуется придерживаться определенных правил.

Для этого электродвигатель подключают к оборудованию, которое необходимо привести в движение. Обычно это механизмы, которые должны работать практически без остановок – вытяжки, насосы и прочее.
Синхронные генераторы
Обратная конструкция – синхронные генераторы. В них процессы протекают немного иначе. Принцип действия синхронного генератора и синхронного двигателя отличаются, но не существенно:
- На обмотку статора не подается напряжение. С нее оно снимается.
- На обмотку ротора подается переменное напряжение, которое необходимо для создания магнитного поля. Потребление электроэнергии крайне маленькое.
- Ротор электрогенератора раскручивается при помощи дизельного или бензинового двигателя либо же силой воды, ветра.
- Вокруг ротора имеется магнитное поле, которое двигается. Поэтому в обмотке статора индуцируется ЭДС, а на концах появляется разность потенциалов.
Но в любом случае требуется стабилизировать напряжение на выходе генераторной установки. Для этого достаточно запитать роторную обмотку от источника, напряжение которого постоянно и не изменяется при колебаниях частоты вращения.
Полюсы обмоток двигателя

В конструкции ротора имеются постоянные или электрические магниты. Их обычно называют полюсами. На синхронных машинах (двигателях и генераторах) индукторы могут быть двух типов:
- Явнополюсными.
- Неявнополюсными.
Они различаются между собой только взаимным расположением полюсов. Для уменьшения сопротивления со стороны магнитного поля, а также улучшения условий для проникновения потока, используются сердечники, изготовленные из ферромагнетиков.
Эти элементы располагаются как в роторе, так и в статоре. Для изготовления используются только сорта электротехнической стали. В ней очень много кремния. Это отличительная особенность такого вида металла. Это позволяет существенно уменьшить вихревые токи, повысить электрическое сопротивление сердечника.
Воздействие полюсов
В основе конструкции и принципа действия синхронных двигателей лежит обеспечение влияния пар полюсов ротора и статора друг на друга. Для обеспечения работы нужно разогнать индуктор до определенной скорости. Она равна той, с которой вращается магнитное поле статора. Именно это позволяет обеспечить нормальную работу в синхронном режиме. В момент, когда происходит запуск, магнитные поля статора и ротора взаимно пересекаются. Это называется «вход в синхронизацию». Ротор начинает вращаться со скоростью, как у магнитного поля статора.
Самое сложное в работе синхронного мотора – это его запуск. Именно поэтому его используют крайне редко. Ведь конструкция усложняется за счет системы запуска. На протяжении долгого времени работа синхронного двигателя зависела от разгонного асинхронника, механически соединенным с ним. Что это значит? Второй тип двигателя (асинхронный) позволял разогнать ротор синхронной машины до подсинхронной частоты. Обычные асинхронники не требуют специальных устройств для запуска, достаточно только подать рабочее напряжение на обмотки статора.
После того, как будет достигнута требуемая скорость, происходит отключение разгонного двигателя. Магнитные поля, которые взаимодействуют в электрическом моторе, сами выводят его на работу в синхронном режиме. Для разгона потребуется другой двигатель. Его мощность должна составлять примерно 10-15 % от аналогичной характеристики синхронной машины. Если нужно вывести в режим электродвигатель 1 кВт, для него потребуется разгонный мотор мощностью 100 Вт. Этого вполне достаточно, чтобы машина смогла работать как в режиме холостого хода, так и с незначительной нагрузкой на валу.
Более современный способ разгона
Стоимость такой машины оказывалась намного выше. Поэтому проще использовать обычный асинхронный мотор, пусть и много у него недостатков. Но именно его принцип работы и был использован для уменьшения габаритов и стоимости всей установки. При помощи реостата производится замыкание обмоток на роторе. В итоге двигатель становится асинхронным. А запустить его оказывается намного проще – просто подается напряжение на обмотки статора.
Во время выхода на подсинхронную скорость возможно раскачивание ротора. Но это не происходит за счет работы его обмотки. Напротив, она выступает в качестве успокоителя. Как только частота вращения будет достаточной, производится подача постоянного напряжения на обмотку индуктора. Двигатель выводится в синхронный режим. Но такой способ можно воплотить только в том случае, если используются моторы с обмоткой на роторе. Если там применяется постоянный магнит, придется устанавливать дополнительный разгонный электродвигатель.
Преимущества и недостатки синхронных моторов

Основное преимущество (если сравнивать с асинхронными машинами) – за счет независимого питания роторной обмотки агрегаты могут работать и при высоком коэффициенте мощности. Также можно выделить такие достоинства, как:
- Снижается ток, потребляемый электродвигателем, увеличивается КПД. Если сравнивать с асинхронным мотором, то эти характеристики у синхронной машины оказываются лучше.
- Момент вращения прямо пропорционален напряжению питания. Поэтому даже если снижается напряжение в сети, нагрузочная способность оказывается намного выше, нежели у асинхронных машин. Надежность устройств такого типа существенно выше.
Но вот имеется один большой недостаток – сложная конструкция. Поэтому при производстве и последующих ремонтах затраты окажутся выше. Кроме того, для питания обмотки ротора обязательно требуется наличие источника постоянного тока. А регулировать частоту вращения ротора можно только с помощью преобразователей – стоимость их очень высокая. Поэтому синхронные моторы используются там, где нет необходимости часто включать и отключать агрегат.
fb.ru
какие они бывают / НПФ ВЕКТОР corporate blog / Habr
В прошлых статьях был рассмотрен принцип работы синхронного и асинхронного электродвигателей, а также рассказано, как ими управлять. Но видов электродвигателей существует гораздо больше! И у каждого из них свои свойства, область применения и особенности.
В этой статье будет небольшой обзор по разным типам электродвигателей с фотографиями и примерами применений. Почему в пылесос ставятся одни двигатели, а в вентилятор вытяжки другие? Какие двигатели стоят в сегвее? А какие двигают поезд метро?
Каждый электродвигатель обладает некоторыми отличительными свойствами, которые обуславливают его область применения, в которой он наиболее выгоден. Синхронные, асинхронные, постоянного тока, коллекторные, бесколлекторные, вентильно-индукторные, шаговые… Почему бы, как в случае с двигателями внутреннего сгорания, не изобрести пару типов, довести их до совершенства и ставить их и только их во все применения? Давайте пройдемся по всем типам электродвигателей, а в конце обсудим, зачем же их столько и какой двигатель «самый лучший».
С этим двигателем все должны быть знакомы с детства, потому что именно этот тип двигателя стоит в большинстве старых игрушек. Батарейка, два проводка на контакты и звук знакомого жужжания, вдохновляющего на дальнейшие конструкторские подвиги. Все ведь так делали? Надеюсь. Иначе эта статья, скорее всего, не будет вам интересна. Внутри такого двигателя на валу установлен контактный узел – коллектор, переключающий обмотки на роторе в зависимости от положения ротора. Постоянный ток, подводимый к двигателю, протекает то по одним, то по другим частям обмотки, создавая вращающий момент. Кстати, не уходя далеко, всех ведь, наверное, интересовало – что за желтые штучки стояли на некоторых ДПТ из игрушек, прямо на контактах (как на фото сверху)? Это конденсаторы – при работе коллектора из-за коммутаций потребление тока импульсное, напряжение может также меняться скачками, из-за чего двигатель создает много помех. Они особенно мешают, если ДПТ установлен в радиоуправляемой игрушке. Конденсаторы как раз гасят такие высокочастотные пульсации и, соответственно, убирают помехи.
Двигатели постоянного тока бывают как очень маленького размера («вибра» в телефоне), так и довольно большого – обычно до мегаватта. Например, на фото ниже показан тяговый электродвигатель электровоза мощностью 810кВт и напряжением 1500В.
Почему ДПТ не делают мощнее? Главная проблема всех ДПТ, а в особенности ДПТ большой мощности – это коллекторный узел. Скользящий контакт сам по себе является не очень хорошей затеей, а скользящий контакт на киловольты и килоамперы – и подавно. Поэтому конструирование коллекторного узла для мощных ДПТ – целое искусство, а на мощности выше мегаватта сделать надежный коллектор становится слишком сложно (рекорд — 12,5МВт).
В потребительском качестве ДПТ хорош своей простотой с точки зрения управляемости. Его момент прямо пропорционален току якоря, а частота вращения (по крайней мере холостой ход) прямо пропорциональна приложенному напряжению. Поэтому до наступления эры микроконтроллеров, силовой электроники и частотного регулируемого привода переменного тока именно ДПТ был самым популярным электродвигателем для задач, где требуется регулировать частоту вращения или момент.
Также нужно упомянуть, как именно в ДПТ формируется магнитный поток возбуждения, с которым взаимодействует якорь (ротор) и за счет этого возникает вращающий момент. Этот поток может делаться двумя способами: постоянными магнитами и обмоткой возбуждения. В небольших двигателях чаще всего ставят постоянные магниты, в больших – обмотку возбуждения. Обмотка возбуждения – это еще один канал регулирования. При увеличении тока обмотки возбуждения увеличивается её магнитный поток. Этот магнитный поток входит как в формулу момента двигателя, так и в формулу ЭДС. Чем выше магнитный поток возбуждения, тем выше развиваемый момент при том же токе якоря. Но тем выше и ЭДС машины, а значит при том же самом напряжении питания частота вращения холостого хода двигателя будет ниже. Зато если уменьшить магнитный поток, то при том же напряжении питания частота холостого хода будет выше, уходя в бесконечность при уменьшении потока возбуждения до нуля. Это очень важное свойство ДПТ. Вообще, я очень советую изучить уравнения ДПТ – они простые, линейные, но их можно распространить на все электродвигатели – процессы везде схожие.
Как ни странно, это самый распространенный в быту электродвигатель, название которого наименее известно. Почему так получилось? Его конструкция и характеристики такие же, как у двигателя постоянного тока, поэтому упоминание о нем в учебниках по привод
habr.com
Синхронный двигатель: понятие, принцип работы, виды
Синхронный двигатель имеет постоянную частоту вращения при разнообразных нагрузках. Часто такие приборы применяют для приводов машин, которые работают с постоянной неизменной скоростью, например, компрессоры, вентиляторы, насосы и пр.
Особенности синхронных двигателей:
- Высокий коэффициент мощности cosФ=0,9
- Возможность использования синхронных двигателей на предприятиях для увеличения общего коэффициента мощности
Высокий КПД: он больше чем у асинхронного двигателя на (0,5-3%) это достигается за счёт уменьшения потерь в меди и большого CosФ.
- Обладает большой прочностью обусловленной увеличенным воздушным зазором.
- Вращающий момент синхронного двигателя прямо пропорционален напряжению в первой степени. Т.е синхронный двигатель будет менее чувствителен к изменению величины напряжения сети.
- Сложность пусковой аппаратуры и большая стоимость.
Устройство и принцип работы синхронного двигателя
 В статоре синхронного двигателя имеется обмотка, которая подключается к сетям трехфазного тока. Она образует собой магнитное поле, которое вращается. Ротор у такой электроэнергетической машины, как синхронный двигатель, состоит из сердечника и обмотки возбуждения. Обмотка подключается через специальные контактные кольца к источнику (обычно это источник постоянного тока или же иногда используют выпрямленный переменный ток). Электрический ток, который протекает через обмотки возбуждения, создает намагничивающее ротор магнитное поле.
В статоре синхронного двигателя имеется обмотка, которая подключается к сетям трехфазного тока. Она образует собой магнитное поле, которое вращается. Ротор у такой электроэнергетической машины, как синхронный двигатель, состоит из сердечника и обмотки возбуждения. Обмотка подключается через специальные контактные кольца к источнику (обычно это источник постоянного тока или же иногда используют выпрямленный переменный ток). Электрический ток, который протекает через обмотки возбуждения, создает намагничивающее ротор магнитное поле.
Магнитное поле статора, которое вращается, намагничивает ротор. Синхронный двигатель с постоянными магнитами имеет разное электромагнитное сопротивление по поперечной и продольной осям полюсов. Силовые линии у магнитного поля обмотки статора начнут изгибаться, потому что они будут как бы стремиться найти пути с наименьшим сопротивлением. Вследствии специфических свойств силовых магнитных линий поля, в свою очередь, такая деформация его вызовет реактивный момент. Именно поэтому ротор будет вращаться синхронно вместе с магнитным полем статора.
Виды синхронных двигателей
В основном все отличия в конструктивном исполнении такого устройства – это модификации вращающейся детали. Ротор синхронной машины может быть с явно выраженными полюсами (т.н. «явнополюсный»), и с неявно выраженными полюсами (т.н.«неявнополюсный»).
- Явнополюсный ротор обычно имеет ярко выраженные, выступающие полюса, на которых размещаются катушки возбуждения.
- Неявнополюсный ротор обычно представляет собой цилиндр из ферромагнитного сплава, на поверхности которого фрезеруют пазы в осевом направлении. Впоследствии именно в эти пазы укладывают обмотки возбуждения.
arve.ru
