
Синхронные двигатели с постоянными магнитами на роторе: управление (синус и/или трапеция)
Например, термин PMSM (СДПМ) может применяться для обозначения двигателя с постоянными магнитами на роторе, независимо от формы его ЭДС, но так же часто его применяют, подразумевая исключительно синусоидальную форму ЭДС двигателя.
Термин BLDC (БДПТ) может применяться для обозначения двигателя с постоянными магнитами на роторе и трапецеидальной ЭДС, а может вообще обозначать не двигатель, а некий мехатронный узел, включающий в себя:
- двигатель с постоянными магнитами и трапецеидальной ЭДС
- датчик положения ротора
- управляемый по сигналам этого датчика полупроводниковый коммутатор.
Собственно этот мехатронный узел, который может, как и двигатель постоянного тока, управляться постоянным напряжением, и породил сам термин BLDC (БДПТ).
Ещё по отношению к синхронным двигателям с постоянными магнитами на роторе в отечественной литературе, можно встретить название «вентильный двигатель»
Попытки автора разобраться с этим термином быстро зашли в тупик, так как в различных источниках обнаружились явные противоречия.
Например, в книге Г.Б. Онищенко «Электрические двигатели» на стр. 47 «вентильным» называется двигатель соответствующий термину BLDC (БДПТ), что предполагает трапецеидальную ЭДС, и это понимаемо.
Но двигатели типа 5ДВМ сам производитель (ЧЭАЗ) называет «вентильными», хотя при этом утверждает, что они имеют синусоидальную ЭДС.
А вот «Википедия»: «Вентильный двигатель следует отличать от бесколлекторного двигателя постоянного тока (БДПТ), который имеет трапецеидальное распределение магнитного поля в зазоре…».
Ну…приехали…
Какой термин, какой форме ЭДС соответствует – непонятно.
А между тем, именно эта форма определяет выбор структуры системы управления двигателем.
Как человек, занимающийся этим управлением, хочу предложить:
- во избежание путаницы забыть термин «вентильный двигатель»
- термином БДПТ обозначать не двигатель, а исключительно описанный выше мехатронный узел (аналог двигателя постоянного тока)
- делить синхронные двигатели с постоянными магнитами на роторе (СДПМ) по типу ЭДС на две группы:
с синусоидальной ЭДС (далее, для краткости, – СДПМс)
с трапецеидальной ЭДС (далее, для краткости, – СДПМт)
Управление
При управлении двигателями с синусоидальной ЭДС используется векторное регулирование (подробно описано в книжке по ссылке http://3v-services.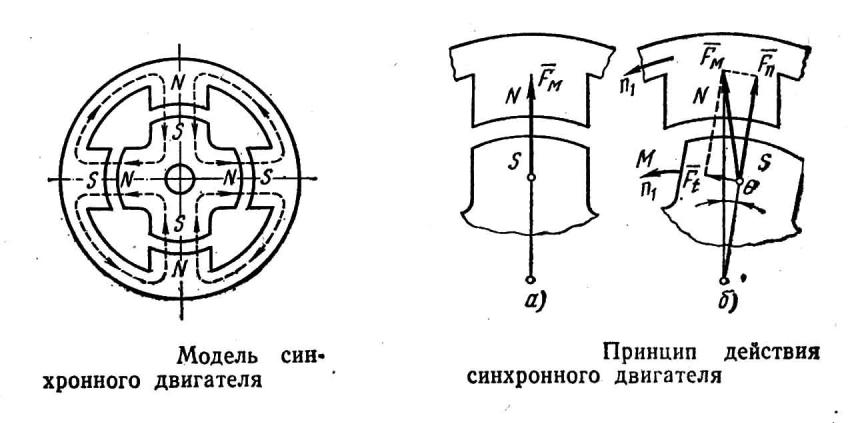 com/books/978-5-97060-766-4/978-5-97060-766-4_SimInTech-01.pdf). С точки зрения возможностей и качества управления это наилучший вариант.
com/books/978-5-97060-766-4/978-5-97060-766-4_SimInTech-01.pdf). С точки зрения возможностей и качества управления это наилучший вариант.
Конструкция двигателей
Форма ЭДС определяется конструкцией двигателя.
Ротор синхронных двигателей представляет собой магнит с различным количеством пар полюсов.
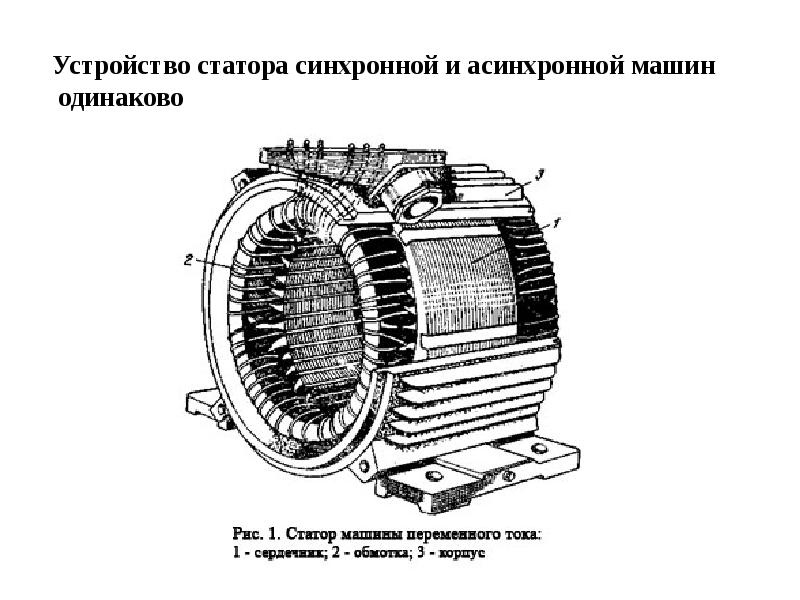
На Рис 1. показаны возможные конструкции статорных обмоток. Обычно синусоидальной ЭДС соответствует «распределенная» намотка, а трапецеидальной «сосредоточенная».
Рис.1
Статорная обмотка двигателя с трапецеидальной ЭДС проще и технологичнее, за счёт этого цена такого двигателя несколько ниже.
Далее остановимся более подробно на двигателе с трапецеидальной ЭДС (СДПМт)
Двигатель с одной парой полюсов будет выглядеть в разрезе так, как показано на Рис.
Рис.2
На статоре СДПМт намотаны три обмотки (А, В, С), сдвинутые в пространстве на 120º. Каждая обмотка состоит из двух секций, включённых встречно. Таким образом, при протекании тока в обмотке она создаёт внутри двигателя два полюса (положительный и отрицательный), к которым и притягивается магнитный ротор. Поочередное изменение токов в обмотках переключает полюса обмоток и заставляет ротор двигаться вслед за полем. На этом и основан принцип работы двигателя.
Уравнения равновесия статорных обмоток двигателя
Уравнения равновесия статорных обмоток двигателя при его включении в «звезду» в неподвижных фазных координатах АВС имеют вид (1).
(1)
Здесь:
– фазные напряжения
– потокосцепления фазных обмоток
– токи фаз
– активное сопротивление фазной обмотки.
Поток в обмотке каждой фазы формируется из следующих составляющих:
- поток, наводимый собственным током фазы
- поток, наводимый магнитными полями других фазных обмоток
- поток, наводимый в обмотке магнитами ротора.
Проиллюстрируем это системой (2):
(2)
Где:
– индуктивность фазных обмоток
– взаимные индуктивности обмоток
– потокосцепления, наводимые в обмотках магнитом ротора.
В общем случае все индуктивности системы (2) могут являться переменными функциями угла поворота поля .
В частном случае для неявнополюсного двигателя (при цилиндрическом роторе) индуктивности и взаимные индуктивности обмоток не зависят от угла.
Обозначив
– индуктивность фазной обмотки,
– взаимная индуктивность двух фазных обмоток,
и подставив выражения (2) в систему (1), получим выражение (3):
(3)
Заметив, что производные по времени от потокосцеплений магнитов ротора
есть не что иное, как наводимая магнитами ротора в этих обмотках ЭДС, систему (3) можно переписать в виде (4).
(4)
Теперь введем понятие единичной функции формы ЭДС.
Единичная функция формы ЭДС – это функция от угла поля (), имеющая единичную амплитуду и повторяющая по форме ЭДС. Для фаз А, В, С обозначим эти функции:
Используя единичные функции формы, мгновенные ЭДС в фазах можно
представить выражением (5):
(5)
Где:
– амплитуда потокосцепления ротора и фазной обмотки
– скорость вращения поля
– скорость вращения ротора
– число пар полюсов двигателя.
Зависимости единичных функций формы ЭДС обмоток СДПМт от угла
поворота поля представлены На Рис.3.
Рис. 3
Вывод формулы для расчёта электромагнитного момента СДПМт
Момент, создаваемый двигателем, является суммой моментов, создаваемых его обмотками.
Посмотрим на уравнение равновесия обмотки фазы А из системы (4).
Умножив обе его части на ток обмотки, получим уравнение для мгновенной электрической мощности обмотки:
Рассмотрим составляющие этой мощности:
– реактивная мощность обмотки
– активная мощность, рассеивающаяся в обмотке
– мощность, создающая электромагнитный момент.
Если пренебречь потерями при переходе электрической мощности в механическую, то можно записать:
,
или:
(6)
Где:
– электромагнитный момент двигателя
– угловая скорость вращения ротора.
Подставив в формулу (6) значения ЭДС из соотношений (5), получим формулу вычисления электромагнитного момента ротора (7).
(7)
Коммутация обмоток СДПМт
В соответствии с формулой (7) момент СДПМт пропорционален сумме произведений фазных токов на функции формы соответствующих ЭДС.
Максимальное значение ЭДС обмотки соответствует плоским участкам трапеции ЭДС. Если бы нам удалось на этих участках угловой траектории сформировать в обмотках токи некоторой постоянной амплитуды, например, совпадающие по знаку со знаком ЭДС, то это позволило бы сформировать при этих токах максимальный постоянный положительный момент.
Для примера рассмотрим на Рис.3 участок угловой траектории от /6 до /2. На этом участке ЭДС в фазе А имеет максимально отрицательное значение, а в фазе В максимально положительное. Следовательно, для получения положительного момента на этом участке угловой траектории надо обеспечить в фазе А отрицательное, а в фазе В положительное значение тока. Для этого фазу А можно подключить на отрицательный, а фазу В на положительный полюса внешнего источника постоянного напряжения (
На этом участке ЭДС в фазе А имеет максимально отрицательное значение, а в фазе В максимально положительное. Следовательно, для получения положительного момента на этом участке угловой траектории надо обеспечить в фазе А отрицательное, а в фазе В положительное значение тока. Для этого фазу А можно подключить на отрицательный, а фазу В на положительный полюса внешнего источника постоянного напряжения (
Величина тока, протекающего через обмотки, будет в свою очередь определяться прикладываемым к обмоткам напряжением, величиной ЭДС и параметрами обмоток.
Если рассуждать таким образом, то можно составить таблицу коммутаций обмоток, обеспечивающих в зависимости от положения ротора момент нужного знака (Табл. 1).
Табл.1 Алгоритм коммутации
Обмотки трёхфазного двигателя можно коммутировать на внешний источник напряжения с помощью трехфазного мостового инвертора.
Логическая обработка сигналов ДПР позволяет определить в каком из шести секторов в данный момент находится ротор.
Работа ДПР поясняется Табл. 2.
Возможная структура системы управления моментом СДПМт
Алгоритм, описанный в Табл.1, предполагает протекание одного и того же тока в двух фазах двигателя при единичном значении функции формы ЭДС в обмотках фаз. Поэтому выражение (7) можно переписать в виде (8).
(8)
Где:
– значение тока в фазах
То есть значение момента пропорционально величине тока в обмотках двигателя.
Вытекающая из формулы (8) структура системы управления моментом в приводе с СДПМт изображена на Рис. 4.
4.
Рис. 4
Данная структура позволяет получить нужный момент, формируя в обмотках двигателя ток необходимой амплитуды, при сохранении алгоритма коммутации (Табл.1).
Эта задача решается с помощью создания на базе трёхфазного мостового инвертора контура тока с ШИМ.
Регулятор тока (ПИ-рег.) формирует сигнал задания напряжения обмоток (U), которое затем реализуется инвертором с ШИМ в соответствии с алгоритмом коммутации (Табл.1).
В качестве сигнала обратной связи в контуре можно использовать трёхфазно-выпрямленные сигналы датчиков тока фаз или сигнал датчика тока в звене постоянного тока инвертора ().
На основе рассмотренного канала управления моментом можно строить внешние контуры управления скоростью и положением.
Однако
Если бы токи в обмотках спадали до нуля и нарастали до нужного уровня мгновенно, то момент двигателя, определяемый их величиной, в установившемся режиме был бы постоянным. В действительности же реальные переходные процессы при коммутации обмоток приводят к пульсациям момента. В зависимости от параметров обмоток, а также соотношения величин текущей ЭДС и напряжения звена постоянного тока эти пульсации могут быть различны по длительности, амплитуде и знаку.
В действительности же реальные переходные процессы при коммутации обмоток приводят к пульсациям момента. В зависимости от параметров обмоток, а также соотношения величин текущей ЭДС и напряжения звена постоянного тока эти пульсации могут быть различны по длительности, амплитуде и знаку.
Кроме этих коммутационных пульсаций в рассматриваемой системе также будут иметь место пульсации момента на частоте ШИМ.
Ниже приведен пример работы модели системы регулирования скорости. Данная модель построена в среде SimInTehc на элементах специализированного тулбокса «Электропривод». Среда позволяет получить максимальное приближение моделируемых процессов к реальности с учетом эффектов временной и уровневой дискретизации.
Часть модели, а именно – модель цифровой системы управления скоростью приведена ниже, на Рис.5. Регулятор скорости системы (Рег.W) выдаёт сигнал момента, который отрабатывается структурой построенной в соответствии с Рис.4.
Рис. 5
5
Для управления был выбран двигатель со следующими параметрами:
Rs=2.875 Ом – сопротивление обмотки фазы
Ls=8.5e-3 Гн – индуктивность фазы
F=0.175 Вб – потокосцепление ротора
Zp=4 – число пар полюсов
Jr=0. 06 кг∙м2 – момент инерции ротора
Напряжение в звене постоянного тока привода было принято равным 100В.
В контуре тока электропривода использовалась ШИМ с частотой 5кГц.
В процессе регулирования происходило ступенчатое увеличение частоты при постоянном моменте сопротивления на валу двигателя (10 Нм).
Графики, полученные в процессе работы модели, приведены на Рис.6.
Рис.6
На графике момента видны существенные пульсации.
Отметим, что в основном они связаны именно с переходными процессами при коммутации обмоток и имеют соответственно частоту ушестерённую по отношению к заданной.
Пульсации, связанные с ШИМ, в данном случае, невелики.
Заметим, что коммутационные пульсации существенно возрастают при увеличении момента, что связано с увеличением тока.
Несколько спасает то, что их влияние на скорость снижает инерция.
А можно ли векторно управлять СДПМт?
Если очень хочется – то можно. Однако и здесь не без особенностей.
Математика и структура стандартной векторной системы управления исходит из синусоидальности поля в зазоре. При трапецеидальной ЭДС это условие нарушается, правда не очень сильно (трапеция это же почти синус).
А результатом этого «почти» будут опять же пульсации момента.
Вид модели цифровой системы векторного управления скоростью в среде SimInTech показан на Рис.7.
Рис.7
Ниже на Рис.8 показан график работы модели уже рассмотренного ранее СДПМт работающего в рассмотренном ранее режиме, но под управлением векторной системы.
В графике момента мы опять наблюдаем пульсации (хотя по сравнению с предыдущим вариантом они несколько уменьшились).
Причины пульсации при векторном управлении и управлении по ДПР различны, но их частота та же – ушестерённая по отношению к заданной.
Заметим, что вследствие несинусоидальности ЭДС токи в обмотках двигателя также будут принципиально несинусоидальными (это действительно так, хотя в масштабе графика на Рис.8 и не слишком заметно).
Рис.8
А можно ли с помощью коммутации обмоток по ДПР управлять двигателем с синусоидальной ЭДС?
С точки зрения автора можно – но не нужно.
Наряду с коммутационными пульсациями момента синусоидальность ЭДС (отсутствие плоской вершины трапеции) в данном случае неминуемо вызовет ещё и дополнительные пульсации, снижающие качество регулирования даже по сравнению с управляемым по ДПР двигателем СДПМт.
А при векторном управлении двигателем с синусоидальной ЭДС пульсаций момента не будет.
Для подтверждения этого тезиса ниже (Рис. 9) приведены графики работы модели двигателя с рассмотренными ранее параметрами, но с синусоидальной ЭДС и векторной системой управления скоростью.
9) приведены графики работы модели двигателя с рассмотренными ранее параметрами, но с синусоидальной ЭДС и векторной системой управления скоростью.
Видно, что пульсации момента в этом случае практически отсутствуют. При правильной настройке регуляторов системы они связаны только с ШИМ-преобразованием и для данного случая почти не видны.
Рис.9
Итоги
Для синхронников с страпецеидальной ЭДС – коммутация по ДПР.
Так же возможно использование и более сложного векторного алгоритма регулирования, что может дать снижение уровня пульсации момента.
Для синхронников с синусоидальной ЭДС лучший вариант это векторное регулирование.
Это сочетание идеально для построения точного электропривода (что собственно и так было понятно).
Ю.Н. Калачёв
Список литературы
[1] А. С. Пушкин «Полтава».
|
Бесколлекторные двигатели постоянного тока. Что это такое? – Avislab
Этой статьёй я начинаю цикл публикаций о бесколлекторных двигателях постоянного тока. Доступным языком опишу общие сведения, устройство, алгоритмы управления бесколлекторным двигателем. Будут рассмотрены разные типы двигателей, приведены примеры подбора параметров регуляторов. Опишу устройство и алгоритм работы регулятора, методику выбора силовых ключей и основных параметров регулятора. Логическим завершением публикаций будет схема регулятора.
Бесколлекторные двигатели получили широкое распространение благодаря развитию электроники и, в том числе, благодаря появлению недорогих силовых транзисторных ключей. Также немаловажную роль сыграло появление мощных неодимовых магнитов.
Однако не стоит считать бесколлекторный двигатель новинкой. Идея бесколлекторного двигателя появилась на заре электричества. Но, в силу неготовности технологий, ждала своего времени до 1962 года, когда появился первый коммерческий бесколлекторный двигатель постоянного тока. Т.е. уже более полувека существуют различные серийные реализации этого типа электропривода!
Немного терминологии
Бесколлекторные двигатели постоянного тока называют так же вентильными, в зарубежной литературе BLDCM (BrushLes Direct Current Motor) или PMSM (Permanent Magnet Synchronous Motor).Конструктивно бесколлекторный двигатель состоит из ротора с постоянными магнитами и статора с обмотками. Обращаю Ваше внимание на то, что в коллекторном двигателе наоборот, обмотки находятся на роторе. Поэтому, далее в тексте ротор – магниты, статор – обмотки.
Для управления двигателем применяется электронный регулятор. В зарубежной литературе Speed Controller или ESC (Electronic speed control).
Что такое бесколлекторный двигатель?
Обычно люди, сталкиваясь с чем-то новым, ищут аналогии. Иногда приходится слышать фразы “ну это как синхронник”, или еще хуже “он похож на шаговик”. Поскольку большинство бесколлекторных двигателей трехфазные, это еще больше путает, что приводит к неправильному мнению о том, что регулятор “кормит” двигатель переменным 3-x фазным током. Все вышесказанное соответствует действительности только отчасти. Дело в том, что синхронными можно назвать все двигатели кроме асинхронных. Все двигатели постоянного тока являются синхронными с самосинхронизацией, но их принцип действия отличается от синхронных двигателей переменного тока, у которых самосинхронизация отсутствует. Как шаговый бесколлекторный двигатель тоже, наверное, сможет работать. Но тут такое дело: кирпич он тоже может летать… правда, недалеко, ибо для этого не предназначен. В качестве шагового двигателя больше подойдет вентильный реактивный двигатель.Попробуем разобраться, что собой представляет бесколлекторный двигатель постоянного тока (Brushles Direct Current Motor). В самой этой фразе уже кроется ответ – это двигатель постоянного тока без коллектора. Функции коллектора выполняет электроника.
Преимущества и недостатки
Из конструкции двигателя удаляется довольно сложный, требующий обслуживания тяжелый и искрящий узел – коллектор. Конструкция двигателя существенно упрощается. Двигатель получается легче и компактнее. Значительно уменьшаются потери на коммутацию, поскольку контакты коллектора и щетки заменяются электронными ключами. В итоге получаем электродвигатель с наилучшими показателями КПД и показателем мощности на килограмм собственного веса, с наиболее широким диапазоном изменения скорости вращения. На практике бесколлекторные двигатели греются меньше, чем их коллекторные братья. Переносят большую нагрузку по моменту. Применение мощных неодимовых магнитов сделали бесколлекторные двигатели еще более компактными. Конструкция бесколлекторного двигателя позволяет эксплуатировать его в воде и агресивных средах (разумеется, только двигатель, регулятор мочить будет очень дорого). Бесколлекторные двигатели практически не создают радиопомех.Единственным недостатком считают сложный дорогостоящий электронный блок управления (регулятор или ESC). Однако, если вы хотите управлять оборотами двигателя, без электроники никак не обойтись. Если вам не надо управлять оборотами бесколлекторного двигателя, без электронного блока управления все равно не обойтись. Бесколлекторный двигатель без электроники – просто железка. Нет возможности подать на него напряжение и добиться нормального вращения как у других двигателей.
Что происходит в регуляторе бесколлекторного двигателя?
Для того чтобы понять, что происходит в электронике регулятора, управляющего бесколлекторным двигателем, вернемся немного назад и сначала разберемся как работает коллекторный двигатель. Из школьного курса физики помним, как магнитное поле действует на рамку с током. Рамка с током вращается в магнитном поле. При этом она не вращается постоянно, а поворачивается до определенного положения. Для того чтобы происходило непрерывное вращение, нужно переключать направление тока в рамке в зависимости от положения рамки. В нашем случае рамка с током – это обмотка двигателя, а переключением занимается коллектор – устройство со щетками и контактами. Устройство простейшего двигателя смотри на рисунке.То же самое делает и электроника, управляющая бесколлекторным двигателем – в нужные моменты подключает постоянное напряжение на нужные обмотки статора.
Датчики положения, двигатели без датчиков
Из вышесказанного важно уяснить, что подавать напряжение на обмотки двигателя нужно в зависимости от положения ротора. Поэтому электроника должна уметь определять положение ротора двигателя. Для этого применяются датчики положения. Они могут быть различного типа, оптические, магнитные и т.д. В настоящее время очень распространены дискретные датчики на основе эффекта Холла (например SS41). В трехфазном бесколлекторном двигателе используется 3 датчика. Благодаря таким датчикам электронный блок управления всегда знает, в каком положении находится ротор и на какие обмотки подавать напряжение в каждый момент времени. Позже будет рассмотрен алгоритм управления трехфазным бесколлекторным двигателем.Существуют бесколлекторные двигатели, которые не имеют датчиков. В таких двигателях положение ротора определяется путем измерения напряжения на незадействованной в данный момент времени обмотке. Эти методы также будут рассмотрены позднее. Следует обратить внимание на существенный момент: этот способ актуален только при вращении двигателя. Когда двигатель не вращается или вращается очень медленно, такой метод не работает.
В каких случаях применяют бесколлекорные двигатели с датчиками, а в каких – без датчиков? В чем их отличие?
Двигатели с датчиками положения более предпочтительны с технической точки зрения. Алгоритм управления такими двигателями значительно проще. Однако есть и свои минусы: требуется обеспечить питание датчиков и прокладку проводов от датчиков в двигателе к управляющей электронике; в случае выхода со строя одного из датчиков, двигатель прекращает работу, а замена датчиков, как правило, требует разборки двигателя.В тех случаях, когда конструктивно невозможно разместить датчики в корпусе двигателя, используют двигатели без датчиков. Конструктивно такие двигатели практически не отличаются от двигателей с датчиками. А вот электронный блок должен уметь управлять двигателем без датчиков. При этом блок управления должен соответствовать характеристикам конкретной модели двигателя.
Если двигатель должен стартовать с существенной нагрузкой на валу двигателя (электротранспорт, подъёмные механизмы и т.п.) – применяют двигатели с датчиками. Если двигатель стартует без нагрузки на валу (вентиляция, воздушный винт, применяется центробежная муфта сцепления и т.п.), можно применять двигатели без датчиков. Запомните: двигатель без датчиков положения должен стартовать без нагрузки на валу. Если это условие не соблюдается, следует использовать двигатель с датчиками. Кроме того, в момент старта двигателя без датчиков возможны вращательные колебания оси двигателя в разные стороны. Если это критично для Вашей системы, применяйте двигатель с датчиками.
Три фазы
Трехфазные бесколлекторные двигатели приобрели наибольшее распространение. Но они могут быть и одно, двух, трех и более фазными. Чем больше фаз, тем более плавное вращение магнитного поля, но и сложнее система управления двигателем. 3-х фазная система наиболее оптимальна по соотношению эффективность/сложность, поэтому и получила столь широкое распространение. Далее будет рассматриваться только трехфазная схема, как наиболее распространенная. Фактически фазы – это обмотки двигателя. Поэтому если сказать “трехобмоточный”, думаю, это тоже будет правильно. Три обмотки соединяются по схеме “звезда” или “треугольник”. Трехфазный бесколлекторный двигатель имеет три провода – выводы обмоток, см. рисунок.
Двигатели с датчиками имеют дополнительных 5 проводов (2-питание датчиков положения, и 3 сигналы от датчиков).
В трехфазной системе в каждый момент времени напряжение подается на две из трех обмоток. Таким образом, есть 6 вариантов подачи постоянного напряжения на обмотки двигателя, как показано на рисунке ниже.
Это позволяет создать вращающееся магнитное поле, которое будет проворачиваться “шагами” на 60 градусов при каждом переключении. Но не будем забегать наперед. В следующей статье будут рассмотрены устройство бесколлекторного двигателя, варианты расположения магнитов, обмоток, датчиков и т.д., а позже будут рассмотрены алгоритмы управления бесколлекторными двигателями.
Бесколлекторные моторы “на пальцах” Что такое бесколлекторные моторы и как управлять бесколлекторными моторами:
Статьи по бесколлекторным моторам:
Мотор-колесо Дмитрия Дуюнова для электровелосипеда
Дмитрий Дуюнов – российский изобретатель асинхронного мотор-колеса, в котором вместо пояса сильных редкоземельных магнитов, как в классических электродвигателях, используется широкое кольцо из медной обмотки. Мощность уже имеющегося прототипа около 2,5 кВт при крутящем моменте в 200Нм.
Дмитрий Дуюнов.
В этом моторе реализован гениальный и простой принцип инженерии – принцип комбинированного или совместного воздействия. Используются две взаимозависимые совмещенные обмотки, одна из которых собрана в «звезду», а вторая в «треугольник».
Данная идея была возможна и ранее, но только в теории, на практике же всё упиралось в необходимость дополнительных, в том числе и эмпирических расчетов, что Дмитрию, как видим успешно удалось. Мотор также управляется внешним контроллером, как и классический тип, и питается от литиевой батареи.
Видео про разработку Дмитрия Дуюнова от канала АвтоВести.
Преимущества мотор-колеса Дуюнова
Все существующие на сегодняшний день электромоторы любого назначения это, либо коллекторные моторы, где контакт происходит с помощью графитовых стержней «щеток», либо моторы, использующие внешний пояс из редкоземельных магнитов.
Коллекторные электромоторы имеют недостаток в виде трущихся деталей, а соответственно вытекающих из этого недостаточной надежности, долговечности и шумности.
Бесщеточные моторы на постоянных магнитах такого недостатка лишены, но они требуют промышленную добычу этих самых магнитов, их обработку и установку, что требует высокопрофессионального производства. К тому же, запасы данных магнитов на нашей планете не безграничны и рано или поздно придется искать им замену или обращаться к другим принципам самого электромотора.
Мотор, представленный Дмитрием, не требует установки магнитов, их место занимает значительного размера обмотка из простой медной проволоки. Данная конструкция в том числе позволила значительно увеличить крутящий момент мотора. Для сравнения, обычное мотор-колесо выдает около 40-60 Нм, против 200 Нм у рассматриваемого прототипа Дуюнова.
Мотор-колесо Дуюнова
Также как и бесщеточные моторы на магнитах, мотор Дмитрия имеет малую неподрессоренную массу, что позволяет рассматривать его использование в том числе в автомобиле в качестве основного движителя. Тем более это возможно благодаря значительному росту мощности мотор-колеса при увеличении размеров внешней обмотки.
Со слов изобретателя – ограничиваясь внутренними габаритами классического автомобильного колеса – возможно расположить в нем мотор 20 и даже более киловатт при частоте вращения 1000 об/мин, что при установке в каждое колесо даст более 80 кВт а это уже более 100 л.с. – чего достаточно для современного городского автомобиля. Вес данной конструкции составит около 18 кг, что не так уж и много, если учесть что данная конструкция будет лишена ступичного узла и приводных валов используемых в классической компоновке автомобиля.
Увеличение мощности в таком моторе, помимо остального, в первую очередь достигается за счет увеличения толщины слоя внешней обмотки мотора – для представленной мощности в 2,5 кВт требуется около 3,5 см слоя обмотки, в то время как для 20 кВт потребуется слой, увеличенный всего до 7 см.
Данное изобретение Дмитрий естественно запатентовал, что не позволяет другим интересующимся организациям по всему миру «украсть» данную идею, хотя постоянные попытки обойти патент не прекращаются – что ожидаемо для изобретения такого уровня.
В ближайшее время данный мотор будет передан в Германию в немецкую независимую лабораторию для получения точных паспортных характеристик и сертификата.
Частотный преобразователь
Дмитрий Левкин
Частотный преобразователь, или преобразователь частоты – электротехническое устройство (система управления), используемое для контроля скорости и/или момента двигателей переменного тока путем изменения частоты и напряжения питания электродвигателя.Согласно ГОСТ 23414-84 полупроводниковый преобразователь частоты – полупроводниковый преобразователь переменного тока, осуществляющий преобразование переменного тока одной частоты в переменный ток другой частоты
Частотный преобразователь – это устройство, используемое для того чтобы обеспечить непрерывное управление процессом. Обычно частотный преобразователь способен управлять скоростью и моментом асинхронных и/или синхронных двигателей.
Частотный преобразователь небольшой мощности
Высоковольтный преобразователь
Преобразователи частоты находят все более широкое применение в различных приложениях промышленности и транспорта. Благодаря развитию силовых полупроводниковых элементов, инверторы напряжения и инверторы тока с ШИМ управлением получают все более широкое распространение. Устройства, которые преобразуют постоянный сигнал в переменный, с желаемым напряжением и частотой, называются инверторами. Такое преобразование может быть осуществлено с помощью электронных ключей (BJT, MOSFET, IGBT, MCT, SIT, GTO) и тиристоров в зависимости от задачи.
На данный момент основная часть всей производимой электрической энергии в мире используется для работы электрических двигателей. Преобразование электрической мощности в механическую мощность осуществляется с помощью электродвигателей мощностью от меньше ватта до нескольких десятков мегаватт.
- Современные электроприводы должны отвечать различным требованиям таким как:
- максимальный КПД;
- широкий диапазон плавной установки скорости вращения, момента, ускорения, угла и линейного положения;
- быстрое удаление ошибок при изменении управляющих сигналов и/или помех;
- максимальное использование мощности двигателя во время сниженного напряжения или тока;
- надежность, интуитивное управление.
Основными элементами частотного преобразователя являются силовая часть (преобразователь электрической энергии) и управляющее устройство (контроллер). Современные частотные преобразователи обычно имеют модульную архитектуру, что позволяет расширять возможности устройства. Также зачастую имеется возможность установки дополнительных интерфейсных модулей и модулей расширения каналов ввода/вывода.
Функциональная схема частотного преобразователя
На микроконтроллере частотного преобразователя выполняется программное обеспечение, которое управляет основными параметрами электродвигателя (скоростью и моментом). Основные методы управления бесщеточными двигателями, используемые в частотных преобразователях представлены в таблице ниже.
Характеристики основных способов управления электродвигателями используемых в частотных преобразователях [3]Примечание:
- Без обратной связи.
- С обратной связью.
- В установившемся режиме
Широкое развитие силовых электрических преобразователей в последние десятилетия привело к увеличению количества исследований в области модуляции. Метод модуляции непосредственно влияет на эффективность всей энергосистемы (силовой части, системы управления), определяя экономическую выгоду и производительность конечного продукта.
Главная цель методов модуляции – добиться лучшей формы сигналов (напряжений и токов) с минимальными потерями. Другие второстепенные задачи управления могут быть решены посредством использования правильного способа модуляции, такие как уменьшение синфазной помехи, выравнивание постоянного напряжения, уменьшение пульсаций входного тока, снижение скорости нарастания напряжения. Одновременное достижение всех целей управления невозможно, необходим компромисс. Каждая схема силового преобразователя и каждое приложение должны быть глубоко изучены для определения наиболее подходящего метода модуляции.
- Методы модуляции можно разделить на четыре основные группы:
- ШИМ – широтно-импульсная модуляция
- ПВМ – пространственно-векторная модуляция
- гармоническая модуляция
- методы переключения переменной частоты
Корни силовой электроники уходят к 1901 году, когда П.К. Хьюитт изобрел ртутный вентиль. Однако современная эра полупроводниковой силовой электроники началась с коммерческого представления управляемого кремниевого выпрямителя (тиристора) компанией General Electric в 1958 году. Затем развитие продолжалось в области новых полупроводниковых структур, материалов и в производстве, давая рынку много новых устройств с более высокой мощностью и улучшенными характеристиками. Сегодня силовая электроника строится на металл-оксид-полупроводниковых полевых транзисторах (MOSFET – metal-oxide-semiconductor field-effect transistor) и биполярных транзисторах с изолированным затвором (IGBT – Insulated-gate bipolar transistors), а для диапазона очень высоких мощностей – на тиристорах с интегрированным управлением (IGCT – Integrated gate-commutated thyristor). Также сейчас доступны интегрированные силовые модули. Новая эра высоковольтных, высокочастотных и высокотемпературных технологий открывается многообещающими полупроводниковыми устройствами, основанными на широкой запрещенной зоне карбида кремния (SiC). Новые силовые полупроводниковые устройства всегда инициируют развитие новых топологий преобразователей [3].
Инвертор напряжения
Инвертор напряжения наиболее распространен среди силовых преобразователей.
Двухуровневый инвертор напряжения
Двухуровневый инвертор напряжения (two-level voltage-source inverter) – наиболее широко применяемая топология преобразователя энергии. Он состоит из конденсатора и двух силовых полупроводниковых ключей на фазу. Управляющий сигнал для верхнего и нижнего силовых ключей связан и генерирует только два возможных состояния выходного напряжения (нагрузка соединяется с положительной или отрицательной шиной источника постоянного напряжения).
Схема двухуровневого инвертора напряжения
Фазное напряжение двухуровневого инвертора напряжения
Используя методы модуляции для генерирования управляющих импульсов возможно синтезировать выходное напряжение с желаемыми параметрами (формой, частотой, амплитудой). Из-за содержания высоких гармоник в выходном сигнале для генерирования синусоидальных токов выходной сигнал необходимо фильтровать, но так как данные преобразователи обычно имеют индуктивную нагрузку (электродвигатели) дополнительные фильтры используются только при необходимости.
Максимальное выходное напряжение определяется значением постоянного напряжения звена постоянного тока. Для эффективного управления мощной нагрузкой требуется высокое постоянное напряжение звена постоянного тока, но на практике это напряжение ограничено максимальным рабочим напряжением полупроводников. Для примера низковольтные IGBT транзисторы обеспечивают выходное напряжение до 690 В. Для того чтобы обойти данное ограничение по напряжению в последние десятилетия были разработаны схемы многоуровневых преобразователей. Данные преобразователи сложнее, чем двухуровневые в плане топологии, модуляции и управления, но при этом имеют лучшие показатели по мощности, надежности, габаритам, производительности и эффективности.
Трехуровневый преобразователь с фиксированной нейтральной точкой
В трехуровневом преобразователе с фиксированной нейтральной точкой (three-level neutral point clamped converter) постоянное напряжение делится поровну посредством двух конденсаторов, поэтому фаза может быть подключена к линии положительного напряжения (посредством включения двух верхних ключей), к средней точке (посредством включения двух центральных ключей) или к линии отрицательного напряжения (посредством включения двух нижних ключей). Каждому ключу в данном случае требуется блокировать только половину напряжения звена постоянного тока, тем самым позволяя увеличить мощность устройства, используя те же самые полупроводниковые ключи, как и в обычном двухуровневом преобразователе. В данном преобразователе обычно используются высоковольтные IGBT транзисторы и IGCT тиристоры.
Схема трехуровневого преобразователя с фиксированной нейтральной точкой
- Недостатками данных преобразователей являются:
- Дисбаланс конденсаторов, создающий асимметрию в преобразователе. Данную проблему предлагается решать путем изменения метода модуляции.
- Неравное распределение потерь из-за того, что потери на переключение внешних и центральных ключей отличаются в зависимости от режима работы. Данная проблема не может быть решена с использованием обычной схемы, поэтому была предложена измененная топология – активный преобразователь со связанной нейтральной точкой (active NPC). В этой схеме диоды заменены управляемыми ключами. Таким образом, выбирая соответствующую комбинацию ключей, возможно уменьшить и равномерно распределить потери.
- ГОСТ Р 50369-92 Электроприводы. Термины и определения.
- Rahul Dixit, Bindeshwar Singh, Nupur Mittal. Adjustable speeds drives: Review on different inverter topologies.- Sultanpur, India.:International Journal of Reviews in Computing, 2012.
- Marian P. Kazmierkowski, Leopoldo G. Franquelo, Jose Rodriguez, Marcelo A. Perez, Jose I. Leon, “High-Performance Motor Drives”, IEEE Industrial Electronicsd, vol. 5, no. 3, pp. 6-26, Sep.2011.
Фазное напряжение трехуровневого преобразователя с фиксированной нейтральной точкой
Преобразователь с фиксированной нейтральной точкой может масштабироваться для достижения больше чем трех уровней выходного сигнала путем деления напряжения звена постоянного тока более чем на два значения посредством конденсаторов. Каждое из этих деленных напряжений может быть подключено к нагрузке с использованием расширенного набора ключей и ограничительных диодов. Вместе с увеличением мощности преимуществами многоуровневого преобразователя является лучшее качество электроэнергии, меньшее значение скорости нарастания напряжения (dv/dt) и связанных электромагнитных помех. Однако, когда преобразователь со связанной нейтральной точкой имеет более трех уровней, появляются другие проблемы. С точки зрения схемотехники в таком случае ограничительные диоды требуют более высокое максимальное рабочее напряжение чем основные ключи, что требует использования различных технологий или нескольких ограничительных диодов соединенных последовательно. В дополнение становится критическим неравномерное использование силовых элементов в схеме. В итоге из-за увеличения количества элементов снижается надежность. Приведенные недостатки ограничивают использование преобразователей с фиксированной нейтральной точкой с более чем тремя уровнями в промышленных приложениях.
Многоуровневые преобразователи
Каскадные преобразователи основанные на модульных силовых ячейках со схемой H-мост (cascaded H-bridge – CHB) и преобразователи с плавающими конденсаторами (flying capacitor converter) были предложены для обеспечения большего количества уровней выходного напряжения в сравнении с преобразователями с фиксированной нейтральной точкой.
Каскадный Н-мостовой преобразователь
Каскадный преобразователь – высоко модульный преобразователь, состоящий из нескольких однофазных инверторов, обычно называемыми силовыми ячейками, соединенными последовательно для формирования фазы. Каждая силовая ячейка выполнена на стандартных низковольтных компонентах, что обеспечивает их легкую и дешевую замену в случае выхода из строя.
Схема каскадного преобразователя
Основным преимуществом данного преобразователя является использование только низковольтных компонентов, при этом он дает возможность управлять мощной нагрузкой среднего диапазона напряжения. Несмотря на то что частота коммутации в каждой ячейке низкая, эквивалентная частота коммутации приложенная к нагрузке – высокая, что уменьшает потери на переключение ключей, дает низкую скорость нарастания напряжения (dv/dt) и помогает избежать резонансов.
Фазное напряжение каскадного преобразователя
Преобразователь с плавающими конденсаторами
Выходное напряжение преобразователя с плавающими конденсаторами получается путем прямого соединения выхода фазы с положительной, отрицательной шиной или подключением через конденсаторы. Количество уровней выходных напряжений зависит от количества навесных конденсаторов и отношения между различными напряжениями.
Схема преобразователя с плавающими конденсаторами
Этот преобразователь, как и в случае каскадного преобразователя, также имеет модульную топологию, где каждая ячейка состоит из конденсатора и двух связанных ключей. Однако, в отличие от каскадного преобразователя добавление дополнительных силовых ключей к конденсаторному преобразователю не увеличивает номинальную мощность преобразователя, а только уменьшает скорость нарастания напряжения (dv/dt), улучшая коэффициент гармоник выходного сигнала. Как и у каскадного преобразователя, модульность уменьшает стоимость замены элементов, облегчает поддержку и позволяет реализовать отказоустойчивую работу.
Фазное напряжение преобразователя с плавающими конденсаторами
Конденсаторный преобразователь требует только один источник постоянного тока для питания всех ячеек и фаз. Поэтому, можно обойтись без входного трансформатора, а количество ячеек может быть произвольно увеличено в зависимости от требуемой выходной мощности. Подобно преобразователю с фиксированной нейтральной точкой, этому преобразователю требуется специальный алгоритм управления для регулирования напряжения на конденсаторах.
Инвертор тока
Для работы инвертору тока всегда требуется управляемый выпрямитель, чтобы обеспечить постоянный ток в звене постоянного тока. В стандартной топологии обычно используются тиристорные выпрямители. Чтобы уменьшить помехи в нагрузке, в звене постоянного тока используется расщепленная индуктивность. Инвертор тока имеет схему силовых ключей наподобие инвертора напряжения, но в качестве силовых ключей используются тиристоры с интегрированным управлением (IGCT). Выходной ток имеет форму ШИМ и не может быть напрямую приложен к индуктивной нагрузке (электродвигателю), поэтому инвертор тока обязательно включает выходной емкостной фильтр, который сглаживает ток и выдает гладкое напряжение на нагрузку. Этот преобразователь может быть реализован для работы на средних напряжениях и более того он по природе имеет возможность рекуперации энергии.
Схема инвертора тока с выпрямителем
Прямые преобразователи
Прямые преобразователи передают энергию прямо от входа к выходу без использования элементов накопления энергии. Основным преимуществом таких преобразователей является меньшие габариты. Недостатком – необходимость более сложной схемы управления.
Циклоконвертер относится к категории прямых преобразователей. Данный преобразователь широко использовался в приложениях требующих высокую мощность. Этот конвертер состоит из двойных тиристорных преобразователей на фазу, который может генерировать изменяемое постоянное напряжение, контролируемое таким образом, чтобы следовать опорному синусоидальному сигналу. Вход каждого преобразователя питается от фозосмещающего трансформатора, где устраняются гармоники входного тока низкого порядка. Выходное напряжение является результатом комбинации сегментов входного напряжения в котором основная гармоника следует за опорным сигналом. По своей природе данный преобразователь хорошо подходит для управления низкочастотными мощными нагрузками.
Схема циклоконвертера
Матричный преобразователь в его прямой и непрямой версии также принадлежит к категории прямых преобразователей. Основной принцип работы прямого матричного преобразователя (direct matrix converter) – возможность соединения выходной фазы к любому из входных напряжений. Преобразователь состоит из девяти двунаправленных ключей, которые могут соединить любую входную фазу с любой выходной фазой, позволяя току течь в обоих направлениях. Для улучшения входного тока требуется индуктивно-емкостной фильтр второго порядка. Выход напрямую соединяется с индуктивной нагрузкой. Не все доступные комбинации ключей возможны, они ограничены только 27 правильными состояниями коммутации. Как говорилось ранее, основное преимущество матричных преобразователей – меньшие габариты, что важно для автомобильных и авиационных приложений.
Схема прямого матричного преобразователя
Непрямой матричный преобразователь (indirect matrix converter) состоит из двунаправленного трехфазного выпрямителя, виртуального звена постоянного тока и трехфазного инвертора. Количество силовых полупроводников такое же как у прямых матричных преобразователей (если двунаправленный ключ рассматривается как два однонаправленных ключа), но количество возможных состояний включения отличается. Используя ту же самую конфигурацию непрямого матричного преобразователя, возможно упростить его топологию и уменьшить количество элементов ограничив его работу от положительного напряжения в виртуальном звене постоянного тока. Уменьшенная топология называется разреженный матричный преобразователь (sparse matrix converter).
Схема непрямого матричного преобразователя
Схема разреженного матричного преобразователя
Библиографический список
Нейрохирург из Кремниевой долины: отказ от завтрака помогает мозгу лучше ноотропов
Фото: iStockАмериканский нейрохирург Рахул Джандиал поделился тремя способами повышения производительности мозга. Они доступны практически всем и не требуют вмешательства «умных» таблеток, так популярных в Кремниевой долине, пишет CNBC.
«Все — от магнатов Кремниевой долины до биохакеров — увлекаются усилителями познавательных способностей, известных как ноотропы», — пишет колумнистка CNBC Джейд Сципиони. Эта тенденция беспокоит известного нейрохирурга Рахуда Джандиала, который называет такие препараты «бездоказательной ерундой».
Популярность «таблеток для ума» вдохновила Джадиала на написание книги, в которой он рассказал, как можно повысить производительность мозга и сохранять его в тонусе, соблюдая простые правила, которым врач следует сам.
Дважды в неделю нейрохирург практикует прерывистое голодание. Оно подразумевает отказ от еды в течение 16 часов. Например, с 9 утра и до 5 вечера он ест в обычном режиме, но в следующие 16 часов отказывается от приема пищи, пропуская завтрак. При этом разрешается пить воду, кофе и чай.
По словам Рахула Джандиала, отсутствие пищи в течение 16 часов увеличивает естественные факторы восстановления нейронов. Именно они позволяют передавать информацию между разными областями мозга и нервной системой. Если нейроны здоровы и работают на полную мощность, информация будет передаваться быстрее и яснее.
Исследование, проведенное в Центре медицинских исследований Университета Джонса Хопкинса, также показало, что прерывистый пост может помочь мозгу «предотвратить нейродегенеративные заболевания, такие как болезнь Альцгеймера и Паркинсона, в то же время улучшая память и настроение».
Далее Джандиал рекомендует практиковать глубокое дыхание: «Прежде чем идти на встречу с боссом или перед тем, как подъехать к месту парковки на работе, просто найдите место, где можно медленно дышать через нос — досчитайте до четырех на вдохе, а затем задержите дыхание на несколько секунд. Потом можно медленно выдохнуть через рот», — рассказал врач.
Ученые из Университета Орегона, пришли к выводу, что всего одиннадцать дней осознанного дыхания вызывают положительные структурные изменения в мозге.
Третье правило, которого придерживается сам Джандиал — соблюдение вертикального положения тела. Во время ходьбы в мозге человека вырабатывается больше BDNF — белка, стимулирующего и поддерживающего развитие нейронов. «Это не гормон, подобный эстрогену. Это похоже на чудо, вырабатываемое специально для мозга», — говорит нейрохирург о BDNF.
В июне 2019 Павел Дуров сообщил, что он уже 15 лет не пьет алкоголь, не потребляет кофеин, не ест мясо, фаст-фуд и не принимает лекарства. Год назад он отказался от глютена, молочных продуктов, яиц и фруктозы, а сейчас — от еды. Дуров отметил, что голодание — это отличный способ очистить и перезагрузить пищеварительную систему и освободить иммунитет от нагрузки от постоянно поступающей пищи.
Подписывайтесь на наш канал в Telegram: @incnews
Двигатель постоянного тока. Характеристики и регулирование
После предыдущего поста о мотор-редукторе мне пришло несколько вопросов по регулированию двигателя постоянного тока. Так что пора написать очередной пост 🙂
Двигатель постоянного тока (ДПТ) это один из самых привычных и понятных электродвигателей, он изучается даже в школе, на физике. Он используется практически везде, где нужен малогабаритный моторчик, а также не спешит сдавать своих позиций и там, где мощность измеряется десятками киловатт. О нем и поговорим.
▌Конструктив и базовый принцип
Не буду тут особо распинаться, покажу картинку из википедии и укажу ряд основных узлов. Все остальное вы и так знаете и трогали своими руками.
1. Статор состоит из источника магнитного поля. Далеко не всегда это постоянный магнит, более того, постоянный магнит это скорей исключение, чем правило. Обычно все же это обмотка возбуждения. По крайней мере на всем, что больше кулака по размерам.
2. Якорь состоит из обмотки якоря и коллекторного узла.
Работает все очень и очень просто. Обмотка якоря отталкивается от магнитного поля статора силой Ампера и совершает пол оборота, стремясь вывести эту силу на ноль и таки вывела бы если бы не коллектор, который ловко всех обламывает переключает полярность катушки и сила вновь становится максимальной. И так по кругу. Т.е. коллектор служит механическим инвертором напряжения в якоре. Запомните этот момент, он нам еще пригодится 🙂
Обычно в мелких моторчиках всего два полюса обмотки возбуждения (одна пара) и трехзубцовый якорь. Три зуба это минимум для запуска из любого положения, но чем больше зубцов тем более эффективно используется обмотка, меньше токи и более плавный момент, т.к сила является проекцией на угол, а активный участок обмотки проворачивается на меньший угол
▌Происходящие в двигателе процессы
Думаю многие из вас кто баловался с движками могли заметить, что у них есть ярко выраженный пусковой ток, когда мотор на старте может рвануть стрелку амперметра, например, до ампера, а после разгона ток падает до каких-нибудь 200мА.
Почему это происходит? Это работает противоэдс. Когда двигатель стоит, то ток который через него может пройти зависит только лишь от двух параметров — напряжения питания и сопротивления якорной обмотки. Так что предельный ток который может развить движок и на который следует рассчитывать схему узнать несложно. Достаточно замерить сопротивление обмотки двигателя и поделить на это значение напряжение питания. Просто по закону Ома. Это и будет максимальный ток, пусковой.
Но по мере разгона начинается забавная вещь, обмотка якоря движется поперек магнитного поля статора и в ней наводится ЭДС, как в генераторе, но направлена она встречно той, что вращает двигатель. И в результате, ток через якорь резко снижается, тем больше, чем выше скорость.
А если движок дополнительно еще подкручивать по ходу, то противоэдс будет выше питания и движок начнет вкачивать энергию в систему, став генератором.
▌Немного формул
Не буду грузить никого выводами, их найдете сами если захотите. Чтобы было поменьше матана рекомендую найти учебник по электроприводу для средних учебных заведений и годом выпуска подревней. От 50х-60х годов самое то 🙂 Там и картинки винтажные и расписано для вчерашнего выпускника сельской семилетки. Много букв и никакого грузилова, все четко и по делу.
Самая главная формула коллекторного двигателя постоянного тока:
U = Е + Iя*Rя
- U — напряжение подаваемое на якорь
- Rя — сопротивление якорной цепи. Обычно за этот символ считают только сопротивление обмотки, хотя можно снаружи навесить резистор какой и он к ней приплюсуется. Тогда пишут как (Rя+Rд)
- Iя — ток в якорной цепи. Тот самый который замеряется амперметром при попытке измерять потребление движка 🙂
- Е — это противоэдс или ЭДС генератора, в генераторном режиме. Она зависит от конструкции двигателя, оборотов и описывается вот такой вот простой формулой
Е = Се * Ф * n
- Ce — одна из конструктивных констант. Они зависят от конструкции двигателя, числа полюсов, количества витков, толщин зазоров между якорем и статором. Нам она не особо нужна, при желании ее можно вычислить экспериментально. Главное, что она константа и на форму кривых не влияет 🙂
- Ф — поток возбуждения. Т.е. сила магнитного поля статора. В мелких моторчиках, где оно задается постоянным магнитом это тоже константа. Но бывает под возбуждение выведена отдельная обмотка и тогда мы можем ее менять.
- n — обороты якоря.
Ну и зависимость момента от тока и потока:
М = См * Iя * Ф
См — конструктивная констатнта.
Вот тут стоит обратить внимание, что зависимость момента от тока совершенно прямая. Т.е. просто замеряя ток, при неизменном потоке возбуждения, мы можем совершенно точно узнать величину момента. Это может быть важно, например, чтобы не сломать привод, когда двигло может развить такое усилие, что легко поломает то, что оно там вращает. Особенно с редуктором.
Ну и из этого же следует, что момент у машины постоянного тока зависит только от способности источника снабжать его током. Так что идеальный нерушимый сверхпроводящий движок вам на раз лом в узел завяжет, пусть даже он сам с ноготок будет. Только энергию подавай.
А теперь смешаем все это в кучу и получим зависимость оборотов от момента — механическую характеристику двигателя.
Если ее построить, то будет нечто следующее:
n0 — это обороты идеального холостого хода сферического двигателя в вакууме. Т.е. когда наш движок ну ваще халявит, момент равен нулю. Ток потребления тоже, естественно, ноль. Т.к. противоэдс равна напряжению. Чисто теоретический вариант. А вторая точка строится уже с каким-либо моментом на валу. Получается прямая зависимость оборотов от момента. А наклон характеристики определяется сопротивлением якорной цепи. Если никаких добавочных резисторов там нет, то это зовут естественной характеристикой.
Обороты идеального холостого хода зависят от напряжения и потока. Больше ни от чего. А если поток константа (постоянный магнит), то только от напряжения. Снижая напряжение вся наша характеристика параллельно смещается вниз. Уменьшили напряжение в два раза — скорость упала в два раза.
Если есть возможность менять поток возбуждения, то можно поднимать скорость выше номинальной. Тут зависимость обратная. Ослабляем поток — двигатель разгоняется, но либо падает момент, либо ему надо жрать больше тока.
Иной двигатель со снятием возбуждения может и в разнос пойти. Помнится сдавал я затянувшийся курсач по электроприводу, уже хрен знает спустя сколько времени после сессии. Вломы мне его делать было, ага 🙂 Ну и сидел в лаборатории, ждал препода. А там какие то балбесы, на курс ниже, лабу делали. Крутили движок вхолостую, а возбуждение к стенду приверчено было на соплях и слетело с клеммы. Движок в разнос пошел. У нас в лаборатории ЭПА ЮУРГУ все серьезно было, машины стояли нешуточные, по десятку киловатт и под сотню другую кг каждый. Все на суровом напряжении в 380 вольт.
В общем, когда эта дура взревела как монстр и стала рваться с креплений, я только и успел крикнуть, что все нахер от машины, вырубай к черту. Не успели, двигло сорвало с креплений, обмотка повылетала с пазов и движку пришел кирдык. Ладно никого не покалечило.
Впрочем, лабы привода это то еще развлечение было. У нас там и горело и взрывалось. Там я приобрел замечательные навыки чинить что угодно, чем угодно в сжатые сроки. В среднем, каждый успел по разу убить стенд наглухо, а лаба часто начиналась с починки паяльника, которым чинили осциллограф с помощью которого реанимировали убитый стенд.
Добавляя резисторы в якорную цепь мы можем увеличить наклон, т.е. чем больше грузим тем больше падает скорость.
Метод плох тем, что резисторы в цепи якоря должны быть расчитаны на ток двигателя, т.е. быть мощными и будут греться зря. Ну и момент резко падает, что плохо.
Есть еще двигатели не независимого, а последовательного возбуждения. Это когда обмотка статора включена последовательно якорю. Не каждый двигатель так можно включить, обмотка возбуждения должна выдерживать ток якоря. Но у них возникает одно интересное свойство. При пуске возникает большой пусковой ток и этот пусковой ток является же током возбуждения, обеспечивая огромный пусковой момент. Механическая характеристика напоминает гиперболу с максимумом в районе нулевых оборотов.
А дальше, по мере разгона, момент падает, а обороты наоборот растут. И если нагрузку убрать с вала, то движок сразу же уходит в разнос. Такие движки ставят на тягловый привод в основном. По крайней мере ставили раньше, до развития силовой электроники. С места эта хрень рвет так, что все стритсракеры нервно закуривают.
▌Режимы работы двигателя постоянного тока
Направление вращения движка зависит от направления тока якоря или направления потока возбуждения. Так что если взять коллекторный двигатель и подключить обмотку возбуждения параллельно якорю, то он будет прекрасно вращаться и на переменном токе (универсальные двигатели, их в кухонную технику часто ставят). Т.к. ток будет одновременно меняться и в якоре и в возбуждении. Момент правда будет пульсирующим, но это мелочи. А для реверса там надо будет поменять полярность включения якоря или возбуждения.
Если нарисовать механическую характеристику в четырех квадрантах, то у нас будет нечто похожее на это:
Вот, например, характеристика 1 на I участке у нас машина работает как двигатель. Нагрузка растет и в определенный момент двигатель останавливается и начинает вращаться в обратную сторону, т.е. нагрузка обращает его вспять. Это тормозной режим, противовключение. Режим очень тяжелый, двигло греется просто зверски, но для торможения очень эффективный. Если же момент на валу сменит направление и пойдет вращать навстречу движку, то мотор сразу же выйдет на генерацию (IV участок).
Характеристика 2 это то же самое, только с обратной полярностью питающего напряжения двигателя.
А характеристика 3 это динамическое торможение. Оно же реостатное. Т.е. когда мы берем и просто коротим наш двигатель на резистор или сам на себя. Можете сами проверить, возьмите любой моторчик и покрутите его, а потом закоротите ему якорь и покрутите снова. На валу будет ощутимое усилие, тем больше, чем качественнее движок.
Кстати, драйвера двигателей вроде L293 или L297 имеют возможность включить реостатное торможение, подачей обоих ключей вверх или вниз. При этом якорь коротится через драйвер на шину земли или питания.
▌Бесколлекторные двигатели постоянного тока
Коллекторный движок он очень хорош. Он чертовски легко и гибко регулируется. Можно повышать обороты, понижать, механическая характеристика жесткая, момент он держит на ура. Зависимость прямая. Ну сказка, а не мотор. Если бы не одна ложка говна во всей этой вкусняшке — коллектор.
Это сложный, дорогой и очень ненадежный узел. Он искрит, создает помехи, забивается проводящей пылью от щеток. А при большой нагрузке может полыхнуть, образовав круговой огонь и тогда все, капец движку. Закоротит все дугой наглухо.
Но что такое коллектор вообще? Нафига он нужен? Выше я говорил, что коллектор это механический инвертор. Его задача переключать напряжение якоря туда сюда, подставляя обмотку под поток.
А на дворе то уже 21 век и дешевые и мощные полупроводники сейчас на каждом шагу. Так зачем нам нужен механический инвертор если мы можем сделать его электронным? Правильно, незачем! Так что берем и заменяем коллектор силовыми ключами, а еще добавляем датчики положения ротора, чтобы знать в какой момент переключать обмотки.
А для пущего удобства выворачиваем двигатель наизнанку — гораздо проще вращать магнит или простенькую обмотку возбуждения, чем якорь со всей этой тряхомудией на борту. В качестве ротора тут выступает либо мощный постоянный магнит, либо обмотка питаемая с контактных колец. Что хоть и смахивает на коллектор, но не в пример надежней его.
И получаем что? Правильно! Бесщеточный двигатель постоянного тока aka BLDC. Все те же няшные и удобные характеристики ДПТ, но без этого мерзкого коллектора. И не надо путать BLDC с синхронными двигателями. Это совсем разные машины и разным принципом действия и управления, хотя конструктивно они ОЧЕНЬ схожи и тот же синхронник вполне может работать как BLDC, добавить ему только датчиков да систему управления. Но это уже совсем другая история.
Страница 1: Как работает двигатель? Домашняя страница 1 страница 2 страница 3 страница 4 Библиография
page_1 Во-первых, есть два основных типа электродвигателей: переменного тока.
(переменный ток) и DC (постоянный ток).
Двигатель переменного тока состоит из двух основных частей: внешней жесткой детали.
называется статором, который создает магнитное поле, а ротор –
подвижный элемент, создающий другое магнитное поле (как они
работы, МИТ) .В результате получается вращающийся магнитный
поле. Это магнитное поле «толкает» ротор, создавая
крутящая сила. Ротор прикреплен к выходному валу, который
передает крутящий момент на устройство, прикрепленное к двигателю. AC
двигатели используют переменный ток с частотой 60 Гц (в США).
Категория двигателей переменного тока может быть разбита на следующие категории:
асинхронные двигатели и синхронные двигатели. По сути,
асинхронному двигателю требуется небольшая разница в скорости вращения ротора
и вращающееся магнитное поле (AC Motor, Wikipedia) . Эта разница называется «скольжением» и создает ток в сети переменного тока.
обмотка (двигатель переменного тока, Википедия) . В результате, если есть
нет скольжения, двигатель не может создавать крутящий момент. С другой
стороны, синхронный двигатель переменного тока не требует скольжения для
работать. Вместо этого он использует постоянные магниты для производства
необходим крутящий момент. Эти двигатели работают быстрее, но также работают с
постоянная скорость (двигатели переменного и постоянного тока, , Университет штата Джорджия) .
Двигатель постоянного тока немного отличается.У них есть статор и
арматура (двигатель постоянного тока, , Википедия, ). Это снова производит
крутящий момент, который можно использовать для питания устройства, однако двигатели постоянного тока могут
изменить их обороты, изменив подачу на них тока
(в отличие от двигателей переменного тока). Двигатель постоянного тока используется в ситуации, когда
скорость, с которой он работает, может потребоваться изменить вручную
через некоторое время. Эти двигатели обычно используются в более крупных
такие приложения, как крупное оборудование. Недостаток ДЦ
мотор в том, что он обычно дороже и требует ремонта
чем двигатель переменного тока.
источников изображений:
2bfly.com (щеточный двигатель постоянного тока)
www.gedigitalenergy.com (Схема электродвигателя переменного тока)
Синхронный двигатель – zxc.wiki
Синхронный двигатель – это однофазная или трехфазная синхронная машина в двигательном режиме, в которой постоянно намагниченный ротор (ротор) синхронно приводится в действие движущимся магнитным вращающимся полем в статоре.Работающий синхронный двигатель совершает движение, синхронное с напряжением переменного тока. Скорость связана с частотой переменного напряжения через количество пар полюсов.
Схема движения трехфазного синхронного двигателя.Устройство и функции
Поле в роторе создается постоянными магнитами (самовозбуждение, например, намагниченный ферритовый цилиндр в качестве ротора) или внешним электромагнитным возбуждением (с катушкой возбуждения на роторе, питание через контактные кольца).Катушки статора иногда приводятся в действие преобразователем частоты с подходящим регулируемым переменным током, особенно в больших синхронных машинах. Это означает, что могут быть реализованы приводы с регулируемой скоростью и высокой производительностью.
При нормальной работе синхронный двигатель не проскальзывает. При нагрузке магнитное поле ротора отстает от магнитного поля статора на определенный угол (угол ротора), который увеличивается с увеличением нагрузки. Однако это возможно только до максимального момента, когда угол составляет 90 °.Если момент нагрузки превышает этот момент пробоя, ротор останавливается.
При включении вращающееся поле статора сразу же вращается с синхронной скоростью. Однако бегуну требуется некоторое время для ускорения из-за его момента инерции. Следовательно, синхронному двигателю требуется вспомогательное средство запуска, например Б. стартовая клетка. Это короткозамкнутый кожух в роторе, через который двигатель как трехфазная асинхронная машина запускается до синхронной скорости. Если ротор почти достигает синхронной скорости, включается ток возбуждения обмотки ротора, так что ротор втягивается во вращающееся поле статора.
Направление вращения двигателя определяется полем вращения статора; две фазы необходимо поменять местами для изменения направления.
Каждый синхронный двигатель с постоянными магнитами может также работать как синхронный генератор. Примерами являются генераторы для велосипедов и мотоциклов. Синхронные машины с независимым возбуждением используются в электростанциях, генераторных установках и в качестве автомобильного генератора переменного тока.
Синхронные двигатели могут работать с однофазным переменным током или трехфазным током (см. Также трехфазную синхронную машину).Реже встречаются двухфазные синхронные двигатели.
Достоинства и недостатки
Одним из преимуществ синхронных двигателей перед двигателями постоянного тока с коммутацией является то, что нет необходимости в коммутаторе, пропускающем рабочий ток – только значительно меньшая мощность возбуждения должна передаваться на ротор с контактными кольцами; Они также не используются для двигателей с постоянным возбуждением. Это исключает износ щеток и увеличивает эффективность.
Одним из преимуществ синхронного двигателя над асинхронным двигателем является жесткая связь скорости и углового положения с рабочей частотой.Таким образом, синхронные двигатели подходят для приводов и других приложений, в которых требуется стабильная скорость, не зависящая от нагрузки. Кроме того, синхронные двигатели с постоянными магнитами более компактны и эффективны, чем асинхронные машины, особенно для небольших машин. Работа со сдвигом фаз также возможна с трехфазным синхронным двигателем. Недостаток – более сложный самозапуск в трехфазной сети. Один из способов избежать этого недостатка – установить в роторе дополнительную короткозамкнутую клетку, чтобы двигатель мог запускаться как асинхронный двигатель.
Типичными для синхронных двигателей являются нежелательные механические крутильные колебания ротора, которые могут быть вызваны неравномерной нагрузкой или возбуждением. Они могут привести к превышению опрокидывающего момента и вызвать неравномерный крутящий момент. Их можно избежать с помощью короткозамкнутых обмоток (короткозамкнутая клетка или демпферные обмотки вокруг полюсов ротора). Положение ротора обычно записывается для работы на преобразователе.
Однофазные синхронные двигатели
Электродвигатель синхронный с зубчатой передачей (поворотный привод микроволновой печи), диаметр 50 мм.Однофазные синхронные двигатели нуждаются в помощи при запуске, чтобы «сделать шаг», но однофазные двигатели с постоянными магнитами часто запускаются сами по себе в неопределенном направлении из-за колебательных движений.Примерами этого являются небольшие водяные насосы (насосы для щелока и аквариумные насосы) и соковыжималки для лимона.
Для малых приводов существуют также синхронные двигатели, роторы которых не намагничены и имеют зубцы для концентрации магнитного поля статора (также зубчатого). В принципе, они похожи на реактивные двигатели. Вам также понадобится помощь при запуске.
Синхронный двигатель механического таймераМиниатюрные синхронные двигатели для синхронных часов имеют небольшие размеры и автоматически запускаются в правильном направлении.В 1970-х и 1980-х годах двигатели оснащались до 25 парами полюсов для увеличения плавности хода. Таким образом, статор и ротор с постоянными магнитами имеют до 50 полюсов. Они вращались только со скоростью 120 об / мин вместо 3000 об / мин. Современные синхронные двигатели для часов имеют более легкий ротор и более легкие шестерни с небольшими зубьями для улучшения плавности хода. Хотя обмотка возбуждения создает только одну пару полюсов, зубцы и зазоры в пластине статора вызывают магнитный поток разной силы, который достаточно различается, чтобы заменить реальные дополнительные полюса.Вот почему зубцы и зазоры вместе составляют количество полюсов ротора с постоянными магнитами.
Однофазные синхронные двигатели можно найти в большом количестве небольших приводов, требующих постоянной скорости или простой конструкции:
Двухфазные синхронные двигатели со вспомогательной фазой
Двухфазные синхронные двигатели часто используются для замены менее эффективных конденсаторных двигателей. У них лучшие характеристики пуска и пусковой момент, чем у однофазных синхронных двигателей, и они позволяют заданное направление вращения и реверсирование направления вращения.Примеры применения:
- Приводы насосов
- Приводы клапанов
Трехфазные синхронные двигатели
С развитием подходящего бессенсорного электронного управления мощностью, трехфазные синхронные двигатели также все чаще используются для более низких мощностей, например, в качестве исполнительных механизмов. Их преимущество заключается в определенном положении ротора с высокой динамикой, высоким крутящим моментом и высокой эффективностью. Сегодня они являются важнейшей формой реализации приводов электромобилей.
Бесщеточные двигатели постоянного тока
Малые постоянные магниты Синхронные двигатели с переключающей электроникой часто называют бесщеточными двигателями постоянного тока , на английском языке бесщеточными двигателями постоянного тока с аббревиатурой BLDC . Пряди катушки статора управляются четырехквадрантным контроллером. Электроника для управления мостом представляет собой регулируемый преобразователь частоты.
См. Также
литературы
- Герд Фемель, Хорст Флахманн, Отто Май: Магистерский экзамен по электрическим машинам .12-е издание, Vogel Buchverlag, Oldenburg and Würzburg, 2000, ISBN 3-8023-1795-5
- Грегор Д. Хеберле, Хайнц О. Хеберле: Трансформаторы и электрические машины в энергетических системах . 2-е издание, Verlag Europa-Lehrmittel, Haan-Gruiten, 1990, ISBN 3-8085-5002-3
- Гюнтер Шпрингер: Специалист в области электротехники . 18-е издание, Verlag Europa-Lehrmittel, Вупперталь, 1989, ISBN 3-8085-3018-9
Интернет-ссылки
Индивидуальные доказательства
- ↑ Комментарии к трехфазным синхронным машинам
Распространенные типы промышленных двигателей | Центр энергоэффективности
AC индукционный / асинхронный
Большинство промышленных двигателей представляют собой асинхронные двигатели трехфазного переменного тока из-за их надежности и низкой стоимости.
В этом случае электрический ток в обмотке статора создает вращающееся магнитное поле, которое «индуцирует» (отсюда и название) электрический ток в роторе. Ток, индуцируемый в роторе, создает магнитное поле, которое противодействует полю статора, вызывая вращение в роторе. Асинхронный двигатель должен работать со скоростью, немного меньшей, чем синхронная, поскольку вращение с синхронной скоростью не приведет к возникновению индуцированного тока ротора.
Вот почему асинхронные двигатели называются асинхронными, потому что ротор вращается медленнее, чем вращающееся магнитное поле статора, создавая крутящий момент вокруг выходного вала.
Если ротор вращается быстрее, чем вращающееся магнитное поле статора, в статоре будет индуцироваться ток. В этом сценарии асинхронные двигатели могут действовать как генераторы.
Асинхронные двигатели недороги, потому что для их работы требуются только электромагниты в статоре и роторе. Они также надежны, потому что не нуждаются в коммутаторах для передачи тока на ротор, что снижает вероятность дугового разряда и износа от трения.
Большинство промышленных предприятий используют асинхронные двигатели из-за их желаемых характеристик, таких как надежность, простота и доступность.
Асинхронный двигатель с короткозамкнутым ротором ( Википедия )
AC синхронный
В синхронных двигателях вращение вала синхронизируется с частотой тока, подаваемого на двигатель. Статор двигателя содержит электромагниты, которые создают магнитное поле, которое вращается в соответствии с характеристиками приложенного к нему тока. Ротор содержит постоянные магниты или электромагниты, которые противодействуют магнитному полю, создаваемому в роторе, вызывая вращение вала.Ротор требует физического подключения к электроэнергии с помощью коммутатора, обычно состоящего из токопроводящей щетки, которая может изнашиваться при использовании.
Эти двигатели называются синхронными, потому что ротор вращается с той же скоростью, что и вращающееся магнитное поле статора.
Хотя синхронные двигатели переменного тока используются реже из-за более высокой стоимости, они обладают более высокой энергоэффективностью, чем асинхронные двигатели переменного тока.
Синхронные двигатели переменного тока уникальны тем, что могут использоваться для корректировки коэффициента мощности промышленного объекта.
Векторы магнитного поля синхронного двигателя ( Википедия )
DC синхронный
Двигатели постоянного тока – наименее распространенный тип двигателей, на смену которым пришли современные двигатели переменного тока.
Статор создает статическое магнитное поле, а ротор создает вращающееся магнитное поле, питаемое от коммутатора.
В результате магнитное поле ротора пытается выровняться с магнитным полем статора, которое создает крутящий момент на выходном валу.
Вместо того, чтобы использовать электромагниты для создания статического магнитного поля, двигатели постоянного тока с постоянными магнитами используют магниты для создания поля. Поскольку магнитное поле присутствует всегда, независимо от состояния питания двигателя, двигатели с постоянными магнитами могут притягивать другие близлежащие ферромагнитные материалы, создавая потенциальный риск в промышленных условиях.
Двигатели постоянного тока с постоянными магнитами также тяжелее и громоздче из-за использования магнитов в статоре.
Анимация работающего двигателя постоянного тока ( Википедия )
Синхронный генератор | BMET Wiki
Синхронный двигатель или генератор переменного тока
Синхронный генератор или обычно называемый генератором переменного тока – это электромеханическое устройство, преобразующее механическую энергию в электрическую энергию переменного тока.В большинстве генераторов переменного тока используется вращающееся магнитное поле, но иногда используются линейные генераторы. В принципе, любой электрический генератор переменного тока можно назвать генератором переменного тока, но обычно это слово относится к небольшим вращающимся машинам, приводимым в действие автомобильными и другими двигателями внутреннего сгорания. В Великобритании большие генераторы переменного тока на электростанциях, приводимые в движение паровыми турбинами, называются турбогенераторами.
Принцип действия
Генераторы переменного тока вырабатывают электричество по тому же принципу, что и генераторы постоянного тока, а именно, когда магнитное поле вокруг проводника изменяется, в проводнике индуцируется ток.Обычно вращающийся магнит, называемый ротором, вращается внутри стационарного набора проводников, намотанных катушками на железном сердечнике, называемом статором. Поле пересекает проводники, генерируя электрический ток, поскольку механическое воздействие заставляет ротор вращаться.
Вращающееся магнитное поле индуцирует переменное напряжение в обмотках статора. Часто имеется три набора обмоток статора, физически смещенных таким образом, что вращающееся магнитное поле создает три фазных тока, смещенных на одну треть периода относительно друг друга.
Магнитное поле ротора может создаваться индукцией (в «бесщеточном» генераторе переменного тока), постоянными магнитами (в очень маленьких машинах) или обмоткой ротора, питаемой постоянным током через контактные кольца и щетки. Магнитное поле ротора может быть даже обеспечено стационарной обмоткой возбуждения с подвижными полюсами в роторе. В автомобильных генераторах переменного тока всегда используется обмотка ротора, которая позволяет управлять напряжением, генерируемым генератором, путем изменения тока в обмотке возбуждения ротора. Машины с постоянными магнитами избегают потерь из-за тока намагничивания в роторе, но имеют ограниченные размеры из-за стоимости материала магнита.Поскольку поле постоянного магнита постоянно, напряжение на клеммах напрямую зависит от скорости генератора. Бесщеточные генераторы переменного тока обычно являются более крупными машинами, чем те, которые используются в автомобилях. И большие генераторы переменного тока на электростанциях, которые приводятся в действие паровой турбиной, называются турбогенераторами. Это абсолютно справедливо для больших объемов использования.
Синхронные скорости
Выходная частота генератора зависит от количества полюсов и скорости вращения. Скорость, соответствующая определенной частоте, называется синхронной скоростью для этой частоты.В этой таблице приведены несколько примеров:
| поляки | об / мин при 50 Гц | об / мин при 60 Гц |
|---|---|---|
| 2 | 3000 | 3600 |
| 4 | 1500 | 1800 |
| 6 | 1000 | 1200 |
| 8 | 750 | 900 |
| 10 | 600 | 720 |
| 12 | 500 | 600 |
| 14 | 428.6 | 514,3 |
| 16 | 375 | 450 |
| 18 | 333,3 | 400 |
| 20 | 300 | 360 |
В общем, один цикл переменного тока создается каждый раз, когда пара полюсов поля проходит через точку на неподвижной обмотке. Соотношение между скоростью и частотой:, где – частота в Гц (циклов в секунду).число полюсов (2,4,6 …) и скорость вращения в оборотах в минуту (об / мин). Очень старые описания систем переменного тока иногда дают частоту в единицах чередования в минуту, считая каждый полупериод как одно чередование ; Таким образом, 12 000 полуколебаний в минуту соответствуют 100 Гц.
Википедия двигателей с гистерезисом. Синхронный двигатель
Синхронный электродвигатель – это электродвигатель переменного тока, в котором в установившемся режиме [1] вращение вала синхронизируется с частотой питающего тока; период вращения в точности равен целому числу циклов переменного тока.
Синхронные двигатели содержат многофазные электромагниты переменного тока на статоре двигателя, которые создают магнитное поле, которое вращается во времени с колебаниями сетевого тока. Ротор с постоянными магнитами или электромагнитами вращается синхронно с полем статора с той же скоростью и, как результат, обеспечивает второе синхронизированное вращающееся магнитное поле любого двигателя переменного тока.
Синхронный двигатель называется с двойным питанием, если он снабжен многофазными электромагнитами переменного тока с независимым возбуждением как на роторе, так и на статоре.Синхронный двигатель и асинхронный двигатель являются наиболее широко используемыми типами двигателей переменного тока. Разница между этими двумя типами заключается в том, что синхронный двигатель вращается со скоростью, привязанной к частоте сети, поскольку он не полагается на индукцию тока для создания магнитного поля ротора. Напротив, асинхронный двигатель требует скольжения: ротор должен вращаться немного медленнее, чем переменный ток, чтобы вызвать ток в обмотке ротора.
Малые синхронные двигатели используются в системах отсчета времени, таких как синхронные таймеры в приборах, магнитофонах и прецизионных сервомеханизмах, в которых двигатель должен работать с точной скоростью; Точность скорости – это точность частоты линии электропередачи, которая тщательно контролируется в крупных взаимосвязанных сетевых системах.Синхронные двигатели доступны от самовозбуждающихся субфракционных размеров [2] до мощных промышленных размеров. Эти машины обычно используются в аналоговых электрических часах, таймерах и других устройствах, где требуется точное время.
В промышленных типоразмерах большей мощности синхронный двигатель выполняет две важные функции. Во-первых, это высокоэффективное средство преобразования энергии переменного тока в работу. Во-вторых, он может работать с опережающим или единичным коэффициентом мощности и тем самым обеспечивать коррекцию коэффициента мощности.Синхронные двигатели подпадают под более общую категорию синхронных машин, которая также включает синхронный генератор. Действие генератора будет наблюдаться, если полюса поля «движутся впереди результирующего потока в воздушном зазоре за счет поступательного движения первичного двигателя».
Действие двигателя будет наблюдаться, если полюса поля «затянутся за результирующим магнитным потоком в воздушном зазоре из-за замедляющего момента нагрузки вала». В зависимости от намагничивания ротора существует два основных типа синхронных двигателей: без возбуждения и с возбуждением от постоянного тока.В двигателях без возбуждения ротор выполнен из стали. На синхронной скорости он вращается синхронно с вращающимся магнитным полем статора, поэтому через него проходит почти постоянное магнитное поле.
Внешнее поле статора намагничивает ротор, создавая магнитные полюса, необходимые для его вращения. Ротор изготовлен из стали с высокой удерживающей способностью, например, из кобальтовой стали. Они производятся в конструкциях с постоянным магнитным сопротивлением и гистерезисом: [4]. У них есть ротор, состоящий из прочной стальной отливки с выступающими зубчатыми полюсами.Обычно число полюсов ротора меньше, чем количество полюсов статора, чтобы минимизировать пульсации крутящего момента и предотвратить одновременное выравнивание всех полюсов – положение, которое не может генерировать крутящий момент.
Это создает крутящий момент, подтягивающий ротор к выравниванию с ближайшим полюсом поля статора. Таким образом, при синхронной скорости ротор «заблокирован» относительно вращающегося поля статора.
Это не может запустить двигатель, поэтому в полюса ротора обычно встроены обмотки с короткозамкнутым ротором, чтобы обеспечить крутящий момент ниже синхронной скорости.Машина запускается как асинхронный двигатель до тех пор, пока не достигнет синхронной скорости, когда ротор «втягивается» и блокируется на вращающемся поле статора. Конструкции реактивных двигателей имеют номинальные значения от долей лошадиных сил в несколько ватт до примерно 22 кВт.
Электродвигатели с очень малым реактивным сопротивлением обладают низким крутящим моментом и обычно используются в измерительных приборах. Моторы с умеренным крутящим моментом и мощностью в несколько лошадиных сил используют конструкцию с короткозамкнутым ротором и зубчатыми роторами. Электродвигатель переменного тока – это электродвигатель, приводимый в действие переменным током переменного тока.Двигатель переменного тока обычно состоит из двух основных частей: внешнего статора с катушками, на которые подается переменный ток для создания вращающегося магнитного поля, и внутреннего ротора, прикрепленного к выходному валу, создающего второе вращающееся магнитное поле.
Магнитное поле ротора может создаваться постоянными магнитами, реактивным сопротивлением или электрическими обмотками постоянного или переменного тока. Менее распространенные линейные двигатели переменного тока работают по тем же принципам, что и вращающиеся двигатели, но их неподвижные и подвижные части расположены по прямой линии, производя линейное движение вместо вращения.Двумя основными типами двигателей переменного тока являются асинхронные двигатели и синхронные двигатели.
Асинхронный двигатель или асинхронный двигатель всегда полагается на небольшую разницу в скорости между вращающимся магнитным полем статора и скоростью вала ротора, называемую скольжением, для индукции тока ротора в обмотке переменного тока ротора. В результате асинхронный двигатель не может создавать крутящий момент, близкий к синхронной скорости, когда индукция или скольжение не имеют значения или перестают существовать. В отличие от этого синхронный двигатель не полагается на индукцию скольжения для работы и использует либо постоянные магниты, выступающие полюса, имеющие выступающие магнитные полюса, либо независимо возбужденную обмотку ротора.
Синхронный двигатель развивает свой номинальный крутящий момент с точно синхронной скоростью. Система синхронного двигателя с бесщеточным ротором и двойным питанием имеет обмотку ротора с независимым возбуждением, которая не основана на принципах скольжения-индукции тока. Бесщеточный электродвигатель с двойным питанием с фазным ротором – это синхронный электродвигатель, который может работать точно на частоте питания или сверх кратной частоты питания.
Другие типы двигателей включают вихретоковые двигатели, а также машины переменного и постоянного тока с механической коммутацией, скорость которых зависит от напряжения и соединения обмоток.Технология переменного тока уходит корнями в открытие Майклом Фарадеем и Джозефом Генри -31, согласно которому изменяющееся магнитное поле может индуцировать электрический ток в цепи. Это открытие обычно приписывают Фарадею, поскольку он первым опубликовал свои открытия.
Французский производитель приборов Ипполит Пиксии (Hippolyte Pixii) создал грубую форму переменного тока, когда спроектировал и построил первый генератор переменного тока. Он состоял из вращающегося подковообразного магнита, проходящего через две катушки с намотанной проволокой. Из-за преимуществ переменного тока в передаче высокого напряжения на большие расстояния, в конце 19 века в Соединенных Штатах и Европе было много изобретателей, пытающихся разработать работоспособные двигатели переменного тока.
Феррарис продемонстрировал работающую модель своего однофазного асинхронного двигателя, а Тесла построил свой рабочий двухфазный асинхронный двигатель и продемонстрировал ее в Американском институте инженеров-электриков в [7] [8] [9], хотя Тесла утверждал, что задумал вращающееся магнитное поле в Если бы ротор двигателя с короткозамкнутым ротором работал с истинной синхронной скоростью, магнитный поток в роторе в любом заданном месте ротора не изменился бы, и в короткозамкнутом роторе не создавался ток.
По этой причине обычные двигатели с короткозамкнутым ротором работают на несколько десятков оборотов в минуту медленнее, чем синхронная скорость. Поскольку вращающееся поле или эквивалентное пульсирующее поле эффективно вращается быстрее, чем ротор, можно сказать, что оно скользит по поверхности ротора. Разница между синхронной скоростью и фактической скоростью называется скольжением, и нагрузка на двигатель увеличивает величину скольжения, поскольку двигатель немного замедляется. Даже без нагрузки внутренние механические потери предотвращают нулевое скольжение.
Скорость двигателя переменного тока определяется в первую очередь частотой источника переменного тока и количеством полюсов в обмотке статора в соответствии с соотношением :. Фактическая частота вращения асинхронного двигателя будет меньше этой рассчитанной синхронной скорости на величину, известную как скольжение, которое увеличивается с создаваемым крутящим моментом. Без нагрузки скорость будет очень близка к синхронной. Скорость в этом типе двигателя традиционно изменялась за счет наличия дополнительных наборов катушек или полюсов в двигателе, которые можно включать и выключать для изменения скорости вращения магнитного поля.
Однако развитие силовой электроники означает, что частота источника питания теперь также может быть изменена, чтобы обеспечить более плавное управление скоростью двигателя.
Этот тип ротора является основным оборудованием для индукционных регуляторов, за исключением использования вращающегося магнитного поля как чисто электрического, а не электромеханического применения. сопротивление трению.
Изначально они назывались «электромеханические тормоза», но с годами название изменилось на «электромагнитные тормоза», ссылаясь на способ их приведения в действие. С тех пор, как они стали популярными в середине века, особенно в поездах и трамваях, разнообразие применений и конструкций тормозов резко увеличилось, но основные операции остались прежними. И электромагнитные тормоза, и вихретоковые тормоза используют электромагнитную силу, но электромагнитные тормоза в конечном итоге зависят от трения, тогда как вихретоковые тормоза напрямую используют магнитную силу.
В локомотивах механическая связь передает крутящий момент на компонент электромагнитного торможения. В трамваях и поездах используются электромагнитные рельсовые тормоза, в которых тормозной элемент под действием магнитной силы прижимается к рельсу. Их отличают от механических путевых тормозов, в которых тормозной элемент механически прижимается к рельсу. Последние конструкторские инновации привели к применению электромагнитных тормозов в самолетах.
Тормоз с фрикционным диском использует фрикционную поверхность с одной пластиной для зацепления входного и выходного элементов сцепления.Выключенные тормоза останавливают или удерживают нагрузку при случайном отключении или преднамеренном отключении электроэнергии. В прошлом некоторые компании называли их «отказоустойчивыми» тормозами. Эти тормоза обычно используются на электродвигателе или рядом с ним. Типичные области применения включают робототехнику, стопорные тормоза для шарико-винтовых пар оси Z и тормоза серводвигателей.
Тормозадоступны с несколькими напряжениями и могут иметь ступицы со стандартным люфтом или без люфта. Также можно использовать несколько дисков для увеличения тормозного момента без увеличения диаметра тормоза.
Существует 2 основных типа удерживающих тормозов. Первый – это пружинные тормоза. Второй – это тормоза с постоянными магнитами. Тип пружины – когда на тормоз не подается электричество, пружина нажимает на прижимную пластину, сжимая фрикционный диск между внутренней прижимной пластиной и внешней крышкой. Эта сила трения передается на ступицу, которая установлена на валу.
Тип с постоянным магнитом – Стояночный тормоз с постоянным магнитом очень похож на стандартный электромагнитный тормоз с включенным питанием.
Вместо сжатия фрикционного диска с помощью пружин в нем используются постоянные магниты для притяжения одноточечного якоря.
Двигатель с гистерезисом
Когда тормоз включен, постоянные магниты создают магнитные линии потока, которые, в свою очередь, могут притягивать якорь к корпусу тормоза. Чтобы отключить тормоз, на катушку подается питание, которое создает переменное магнитное поле, которое нейтрализует магнитный поток постоянных магнитов. Оба тормоза с отключенным питанием считаются включенными, если на них не подается питание.Обычно от них требуется удерживать или останавливаться в одиночку в случае потери мощности или когда мощность недоступна в цепи машины.
Тормоза с постоянными магнитами имеют очень высокий крутящий момент для своего размера, но также требуют постоянного контроля тока для компенсации постоянного магнитного поля.
Пружинные тормоза не требуют постоянного регулирования тока, они могут использовать простой выпрямитель, но имеют больший диаметр или для увеличения крутящего момента потребуются установленные друг на друга фрикционные диски. Тормоза с магнитными частицами по своей конструкции отличаются от других электромеханических тормозов благодаря широкому диапазону рабочего крутящего момента.
Как и в электромеханическом тормозе, крутящий момент по отношению к напряжению почти линейный; однако в тормозе с магнитными частицами крутящий момент можно очень точно контролировать в пределах рабочего диапазона оборотов устройства. Это делает эти устройства идеально подходящими для приложений контроля натяжения, таких как намотка проволоки, фольга, пленка и контроль натяжения ленты. Благодаря быстрому реагированию они также могут использоваться в приложениях с большим циклом, таких как считыватели магнитных карт, сортировочные машины и этикетировочное оборудование.
Магнитные частицы, очень похожие на железные опилки, находятся в полости для порошка.Когда на катушку подается электричество, возникающий магнитный поток пытается связать частицы вместе, почти как слякоть магнитных частиц. По мере увеличения электрического тока связь частиц усиливается. Тормозной ротор проходит через эти связанные частицы. Вывод корпуса жестко прикреплен к некоторой части машины. Гистерезис – это понятие в физической науке.
При гистерезисе выход системы зависит не только от ее входа, но и от истории прошлых входов.Это потому, что история влияет на значение внутреннего состояния. Чтобы предсказать будущие результаты работы системы, необходимо знать ее внутреннее состояние или историю.
Эффект может произойти из-за задержки между вводом и выводом. Этот эффект исчезает, когда входной сигнал изменяется медленнее. Этот эффект соответствует описанию гистерезиса, приведенному выше, но его часто называют гистерезисом, зависящим от скорости, чтобы отличить его от гистерезиса с более длительным эффектом памяти. Гистерезис возникает в ферромагнитных материалах и сегнетоэлектрических материалах.Из Simple English Wikipedia, бесплатной энциклопедии.
Не путать с истерией. Системы с гистерезисом. Нью-Йорк: Springer-Verlag. Гистерезис в магнетизме: для физиков, материаловедов и инженеров.
Academic Press. Мультимасштабная модель. Категория: Наука. Пространства имен Page Talk. Просмотры Прочитать Изменить Источник изменений Просмотреть историю. Wikimedia Commons. Гистерезисный двигатель – это синхронный двигатель с равномерным воздушным зазором и без возбуждения постоянным током. Работает как при однофазном, так и при трехфазном питании.
Крутящий момент в гистерезисном двигателе создается из-за гистерезиса и вихревых токов, индуцируемых в роторе под действием вращающегося потока обмоток статора. Работа двигателя зависит от работы постоянно вращающегося магнитного потока.
Для работы в режиме расщепления фаз обмотка статора двигателя имеет два однофазных источника питания. Эта обмотка статора остается постоянно подключенной к однофазной сети как при пуске, так и во время работы двигателя.
Ротор двигателя выполнен из гладкого цилиндра из хромистой стали и не имеет обмотки. Он обладает высокой удерживающей способностью, и из-за этого очень трудно изменить магнитную полярность, если она вызвана вращающимся потоком ротора.
Ротор гистерезисного двигателя движется синхронно, потому что полюс двигателя магнитно блокируется со статором, имеющим противоположные полярности. Статор гистерезисного двигателя создает вращающееся магнитное поле и почти аналогичен статору асинхронного двигателя.Таким образом, статор двигателя подключается либо к однополярному, либо к трехфазному источнику питания. Трехфазный двигатель создает более однородное вращающееся поле по сравнению с однофазным источником питания.
Обмотка статора однофазного гистерезисного двигателя изготовлена из постоянных разделенных конденсаторов или с экранированными полюсами. Конденсатор используется со вспомогательной обмоткой для создания однородного поля. Ротор гистерезисного двигателя состоит из сердечника из алюминия или другого немагнитного материала, на который нанесен слой специального магнитного материала.На рисунке ниже показан ротор гистерезисного двигателя. Внешний слой имеет несколько тонких колец, образующих многослойный ротор.
Ротор двигателя представляет собой гладкий цилиндр, на нем нет обмоток. Кольцо изготовлено из твердого хрома или кобальтовой стали с большой петлей гистерезиса, как показано на рисунке ниже.
Когда питание подается на статор, создается вращающееся магнитное поле. Это магнитное поле намагничивает кольцо ротора и наводит полюс внутри него.Из-за потерь на гистерезис в роторе индуцированный поток ротора отстает от потока вращающегося статора. Таким образом, значение Коэрцитивной силы и остаточной магнитной индукции магнитного материала должно быть большим.
Идеальный материал имел бы прямоугольную петлю гистерезиса, как показано петлей 1 на рисунке петли гистерезиса. Магнитное поле статора создает в роторе вихревые токи. В результате они создают собственное магнитное поле. Потери на вихревые токи рассчитываются по приведенному ниже уравнению.Как мы знаем. Крутящий момент определяется уравнением, показанным ниже.
Спартак, сезон 1Теперь крутящий момент из-за потери гистерезиса определяется уравнением, показанным ниже. Крутящий момент, обусловленный гистерезисом, определяется как. Из уравнения 1 ясно, что крутящий момент пропорционален скольжению.
Griffpatch real faceКогда скорость двигателя достигает синхронной скорости, скольжение становится равным нулю, и крутящий момент также становится равным нулю. Поскольку крутящий момент электромагнита создается двигателем из-за потерь на гистерезис, он остается постоянным при всех оборотах ротора до момента пробоя.
4jb1t max boostПри синхронной скорости вихретоковый крутящий момент равен нулю, и присутствует только крутящий момент из-за потерь на гистерезис. Кривая 1 – это идеальная кривая, а кривая 2 – практическая кривая гистерезиса двигателя. Характеристика крутящего момента двигателя с гистерезисом отличается от характеристики асинхронного двигателя. Гистерезис – это зависимость состояния системы от ее истории.
Например, магнит может иметь более одного возможного магнитного момента в данном магнитном поле в зависимости от того, как поле изменялось в прошлом.Графики одного компонента момента часто образуют петлю или кривую гистерезиса, где есть разные значения одной переменной в зависимости от направления изменения другой переменной.
Эта историческая зависимость является основой памяти на жестком диске и остаточной составляющей, которая сохраняет запись величины магнитного поля Земли в прошлом. Гистерезис возникает в ферромагнитных и сегнетоэлектрических материалах, а также при деформации резиновых лент и сплавов с памятью формы и многих других природных явлениях.
В природных системах это часто связано с необратимыми термодинамическими изменениями, такими как фазовые переходы, и с внутренним трением; диссипация – частый побочный эффект. Гистерезис можно найти в физике, химии, инженерии, биологии и экономике. Он встроен во многие искусственные системы: например, в термостаты и триггеры Шмитта, он предотвращает нежелательное частое переключение.
Гистерезис может быть динамической задержкой между входом и выходом, которая исчезает, если вход изменяется медленнее; это известно как гистерезис, зависящий от скорости.Однако такие явления, как петли магнитного гистерезиса, в основном не зависят от скорости, что делает возможной долговечную память. Системы с гистерезисом нелинейны, и их математически сложно моделировать. Некоторые модели, такие как модель Прейзаха, первоначально применявшаяся к ферромагнетизму, и модель Бока-Вена пытаются уловить общие черты гистерезиса; а также существуют феноменологические модели конкретных явлений, такие как модель ферромагнетизма Джайлса-Атертона.
Он был придуман сэром Джеймсом Альфредом Юингом для описания поведения магнитных материалов.Некоторые ранние работы по описанию гистерезиса в механических системах были выполнены Джеймсом Клерком Максвеллом. Более формальная математическая теория систем с гистерезисом была разработана в 2005 г. группой русских математиков во главе с Марком Красносельским. Один из типов гистерезиса – это задержка между входом и выходом. Этот вид гистерезиса часто называют гистерезисом, зависящим от скорости.
Если вход уменьшен до нуля, выход продолжает реагировать в течение конечного времени. Это представляет собой воспоминание о прошлом, но ограниченное, потому что оно исчезает, когда выходной сигнал уменьшается до нуля.Фазовое отставание зависит от частоты входа и стремится к нулю при уменьшении частоты. Когда зависящий от скорости гистерезис обусловлен диссипативными эффектами, такими как трение, он связан с потерей мощности. Системы с гистерезисом, не зависящим от скорости, имеют постоянную память о прошлом, которая остается после того, как переходные процессы исчезли.
Если входная переменная X t циклически изменяется от X 0 до X 1 и обратно, выход Y t может быть изначально Y 0, но при возврате может иметь другое значение Y 2. Значения Y t зависят от пути значений, который проходит X t, но не от скорости, с которой он проходит путь.В системах управления можно использовать гистерезис для фильтрации сигналов, чтобы выходной сигнал реагировал менее быстро, чем в противном случае, с учетом недавней истории системы.
Например, термостат, управляющий нагревателем, может включать нагреватель, когда температура падает ниже A, но не выключать его, пока температура не поднимется выше B. Точно так же реле давления может быть сконструировано так, чтобы показывать гистерезис с заданными значениями давления. заменены пороги температуры. Часто к электронной схеме намеренно добавляется некоторая величина гистерезиса, чтобы предотвратить нежелательное быстрое переключение.
Этот и аналогичные методы используются для компенсации дребезга контактов в переключателях или шума в электрическом сигнале. Триггер Шмитта – это простая электронная схема, которая демонстрирует это свойство. Фиксирующее реле использует соленоид для приведения в действие храпового механизма, который удерживает реле в замкнутом состоянии, даже если питание на реле прекращается. В некоторых соревнованиях матчи, которые достигают одного набора, решаются тай-брейком матча.
Общее количество игр в игре в следующем сете Если следующий сет не сыгран, то ставки на этот сет аннулируются.Ставки на игровые очки Ставки предлагаются игроку на то, чтобы выиграть назначенное очко. Ставки остаются в силе независимо от того, набрано ли очко на тай-брейке. Рынки тай-брейков в игре (включая тай-брейки) Если тай-брейк не разыгрывается в заявленном сете, все ставки на этих рынках аннулируются.
In-Play – Игрок будет разбит во время матча В случае дисквалификации или выхода из игры, ставки будут аннулированы, если игрок еще не был разбит (кроме случаев, когда у него нет мыслимой возможности для повторной подачи – в этом случае ставки будут рассчитаны. на плеере, не сломанном).In-Play – Неверный сервер Если неправильный игрок указан как (Svr), то любые ставки, сделанные на текущую или следующую игру, текущий или следующий счет игры, ставки по очкам или первое очко в следующей игре, будут аннулированы, независимо от результата.
Водное поло Ставки на аутсорсинг: разыгрывается олл-ин или нет. Групповые ставки Если один или несколько участников не принимают участие в определенном событии, ставки аннулируются. Матчи по пересеченной местности – Расчет будет основан на самом быстром указанном времени этапа.
Двигатель с гистерезисом
Другие виды спортаArcheryOutright Ставки на участие в соревновании олл-ин или нет.Ставки на матч – в случае, если матч начался, но не был завершен, следующие рынки будут аннулированы, если конкретный рыночный результат уже не определен: Выиграть Матч Общее количество очков (2 исхода) Победитель сета (3 исхода) Победитель конца (3 исхода). -Way) При размещении ставок учитываются дополнительные стрелки. Ставки CurlingOutright – олл-ин, участвовать или нет. Ставки на победу в турнире по лакроссу – все ставки имеют силу. МОЙ АККАУНТ Как мне открыть счет в betbull.
Я забыл свое имя пользователя или пароль.
Я хочу закрыть свою учетную запись.ПЛАТЕЖИ Какие способы оплаты я могу использовать. Какая минимальная сумма депозита.
Zillow недавно продалЕсть ли комиссии за ввод и вывод. Сколько времени нужно, чтобы депозиты отображались на моем счете. Как долго длится вывод средств.
Какая максимальная ставка. Какой максимальный выигрыш. Максимальный выигрыш отличается от спортивного, и его можно посмотреть в правилах и условиях. ДРУГОЕ Ответственная игра Пожалуйста, ознакомьтесь с нашей политикой ответственной игры в разделе “Ответственная игра”.
Особенности Подписывайтесь на насПомощьЗагрузите iOSЗагрузите AndroidПартнерыО насСвяжитесь с намиУсловия и положенияПравилаПолитика конфиденциальностиОтветственная играПравила ставок на спортFAQОбратная связь.Подпишитесь на нашу электронную рассылку, чтобы первыми узнавать о новостях, событиях, эксклюзивных акциях и конкурсах. Просто введите свой адрес электронной почты выше и нажмите «Отправить». Просто введите ниже свой адрес электронной почты и нажмите «Отправить». ЗАБРОНИРУЙТЕ ОНЛАЙН СЕЙЧАС ИЛИ ПОЗВОНИТЕ: 020 7248 8600 Как и в Рождество, ожидание почти мучительно, но, к счастью, ожидание уже позади.
Royal Birkdale видит долгожданное возвращение к действительно сложному курсу ссылок. Он может быть красивым (вероятно, самым красивым на ротации), но это будет чудовище.Один из распространенных фактов заключается в том, что последние 6 победителей The Open играли в Scottish Open неделей ранее. Мы подготовили Серхио к этому месту еще до того, как он сломал свою главную утку на The Masters. Он получит серьезную поддержку по уважительной причине. Это мейджор, который все ожидали, что он выиграет первым, и у него тоже было так много промахов.
Если бы я мог выбрать только одного игрока, Серхио был бы человеком.
Ресторан Mediterraneo СарасотаАсинхронные двигатели
переменного тока и синхронные двигатели с постоянными магнитами
* Изображение предоставлено компанией New Energy and Fuel.com
Авторы : Стив Бистак, региональный менеджер по продажам – NE, департамент приводов переменного тока / HMI, Fuji Electric Corp. of America, и Sun Y. Kim (Sean), старший региональный менеджер, ACDR / HMI, Fuji Electric Corp. of America
Большинство насосов и вентиляторов, работающих в промышленных и коммерческих целях, в настоящее время приводится в действие асинхронными двигателями переменного тока. «ACIM», что означает «асинхронный двигатель переменного тока», представляет собой асинхронный тип двигателя, в котором для вращения ротора используется электрический ток.Крутящий момент создается электрическим током в роторе. Электрический ток создается за счет электромагнитной индукции магнитного поля обмоток статора. В ACIM ротор всегда вращается с меньшей скоростью, чем магнитное поле. «PMSM», что означает «синхронный двигатель с постоянными магнитами», полагается на магниты, вращающие ротор, который вращается с той же скоростью, что и внутреннее вращающееся магнитное поле PMSM.
Есть несколько ключевых различий между асинхронными двигателями переменного тока и синхронными двигателями с постоянными магнитами.
Двигатели с постоянными магнитами ДОЛЖНЫ работать с приводом.
Асинхронные двигателипеременного тока могут использоваться без частотно-регулируемого привода для привода насоса или вентилятора, но часто устанавливаются с частотно-регулируемыми приводами (VFD) в насосных или вентиляционных системах, чтобы повысить эффективность системы. Синхронным двигателям с постоянными магнитами для работы требуется привод. PMSM не могут работать без привода. ЧРП необходим для точного управления скоростью PMSM в соответствии с требованиями приложения к давлению, расходу, объему и т. Д.Некоторые новые частотно-регулируемые приводы уже поставляются с опциями управления двигателем с постоянными магнитами в качестве стандартной функции, что позволяет операторам управлять двигателем с постоянными магнитами для более эффективного управления вентилятором и / или насосом.
Двигатели с постоянными магнитами обеспечивают значительное повышение эффективности по сравнению с асинхронными двигателями переменного тока.
Эффективность полной нагрузки двигателя с постоянными магнитами выше, чем у асинхронного двигателя переменного тока. На рисунке 1 ниже показаны диапазоны эффективности между двумя стандартами асинхронных двигателей переменного тока и известными опубликованными двигателями с постоянными магнитами.
Рисунок 1 . Эффективность двигателя с постоянными магнитами на мощности частотно-регулируемого привода. ACIM на синусоиде. Двигатели ACIM теряют 0,5–1,5 балла кпд при работе с частотно-регулируемым приводом.
Важно отметить, что частотно-регулируемые приводы не повышают КПД двигателя; ЧРП помогают повысить эффективность системы в диапазонах рабочих скоростей, поскольку большинство систем не всегда работают на максимальных скоростях. Добавление частотно-регулируемого привода помогает повысить эффективность вашей системы, поскольку он может замедлять двигатель и вентилятор или насос, а не поворачивать клапан для дросселирования насоса или закрывать заслонку, чтобы блокировать поток воздуха.
Взгляните на рисунок 2, на котором сравнивается 10-сильный синхронный двигатель с постоянным магнитом 1800 об / мин и двигатель NEMA Premium, работающий с переменной нагрузкой по крутящему моменту в диапазоне скоростей от 3 до 1. Вы можете видеть, что в обоих случаях эффективность обоих типов двигателей падает. КПД двигателя NEMA Premium падает с примерно 90% до примерно 72% при 600 об / мин, а ECPM падает примерно с 94% до 83%. Хотя работа системы влияет на эффективность оборудования, было доказано, что двигатели с постоянными магнитами показывают более высокий КПД по сравнению с асинхронными двигателями переменного тока.
Рисунок 2 . Сравнение относительной эффективности двигателя PMSM и ACIM с диапазоном изменения 3: 1.
Преимущества и недостатки двигателей с постоянными магнитами
Хотя асинхронные двигатели переменного тока чаще встречаются в системах с моторным приводом, они часто больше по размеру и менее эффективны, чем двигатели с постоянными магнитами. Хотя решения с двигателями с постоянными магнитами обычно имеют более высокую начальную стоимость, они могут предлагать меньший размер для более компактных механических блоков и, что более важно, более высокую эффективность.
Двигатели с постоянными магнитами обычно дороже, чем асинхронные двигатели переменного тока, и, как известно, их труднее запускать, чем асинхронные двигатели переменного тока. Однако преимущества двигателей с постоянными магнитами включают более высокий КПД (как обсуждалось выше), меньшие размеры (двигатели с постоянными магнитами могут составлять до одной трети от большинства размеров двигателей переменного тока, что значительно упрощает установку и обслуживание) и способность PMSM поддерживать полный крутящий момент на низких оборотах.
Тенденция меняется
Использование PMSM в сочетании с VFD не новость; однако инженеры-конструкторы и владельцы оборудования начинают устанавливать больше двигателей с постоянными магнитами для вентиляторов и насосов из-за их меньшего размера и более высокой эффективности.До этого момента частотно-регулируемые приводы требовали специальной формулы для управления двигателем с постоянными магнитами; Сейчас на рынке доступно несколько новых частотно-регулируемых приводов, которые имеют встроенную стандартную функцию для управления двигателями с постоянными магнитами без дополнительных затрат.
По мере того, как все больше производителей частотно-регулируемых приводов начинают добавлять функции для более эффективного управления модулями управления двигателем, владельцы и операторы приобретают тенденцию к установке систем двигателей, которые работают более эффективно, в меньших корпусах и с меньшими затратами.
Электродвигатель | Британника
Самый простой тип асинхронного двигателя показан на рисунке в разрезе.Трехфазный набор обмоток статора вставлен в пазы в железе статора. Эти обмотки могут быть подключены по схеме “звезда”, обычно без внешнего подключения к нейтральной точке, или по схеме “треугольник”. Ротор состоит из цилиндрического стального сердечника с проводниками, размещенными в пазах по всей поверхности. В наиболее обычной форме эти проводники ротора соединены вместе на каждом конце ротора токопроводящим концевым кольцом.
Поперечное сечение трехфазного асинхронного двигателя.
Британская энциклопедия, Inc.Принцип работы асинхронного двигателя может быть разработан, сначала предположив, что обмотки статора подключены к трехфазному источнику питания и что набор из трех синусоидальных токов, показанных на рисунке, протекает в обмотках статора. На этом рисунке показано влияние этих токов на создание магнитного поля через воздушный зазор машины в течение шести мгновений цикла. Для простоты показана только центральная токопроводящая петля для каждой фазной обмотки.В момент t 1 на рисунке, ток в фазе a является максимальным положительным, а в фазах b и c – это половина отрицательного значения. Результатом является магнитное поле с приблизительно синусоидальным распределением вокруг воздушного зазора с максимальным значением наружу вверху и максимальным значением внутрь внизу. В момент времени t 2 на рисунке (т.е. одна шестая цикла позже), ток в фазе c является максимально отрицательным, в то время как в фазе b и фазе a значение составляет половину положительный.Результатом, как показано на рисунке для t 2 , снова является синусоидально распределенное магнитное поле, но повернутое на 60 ° против часовой стрелки. Исследование распределения тока для t 3 , t 4 , t 5 и t 6 показывает, что магнитное поле продолжает вращаться с течением времени. Поле совершает один оборот за один цикл токов статора. Таким образом, совокупный эффект трех равных синусоидальных токов, равномерно смещенных во времени и протекающих в трех обмотках статора, равномерно смещенных в угловом положении, должен создать вращающееся магнитное поле с постоянной величиной и механической угловой скоростью, которая зависит от частоты электроснабжение.
Получите подписку Britannica Premium и получите доступ к эксклюзивному контенту. Подпишись сейчасВращательное движение магнитного поля относительно проводников ротора вызывает индуцирование напряжения в каждом из них, пропорциональное величине и скорости поля относительно проводников. Поскольку проводники ротора закорочены друг с другом на каждом конце, в этих проводниках будут протекать токи. В простейшем режиме работы эти токи будут примерно равны индуцированному напряжению, деленному на сопротивление проводника.На этом рисунке показана диаграмма токов ротора для моментов времени t 1 рисунка. Видно, что токи приблизительно синусоидально распределены по периферии ротора и расположены так, чтобы создавать вращающий момент против часовой стрелки на роторе (то есть вращающий момент в том же направлении, что и вращение поля). Этот крутящий момент ускоряет ротор и вращает механическую нагрузку. По мере увеличения скорости вращения ротора его скорость относительно скорости вращающегося поля уменьшается.Таким образом, индуцированное напряжение уменьшается, что приводит к пропорциональному снижению тока в проводнике ротора и крутящего момента. Скорость ротора достигает постоянного значения, когда крутящий момент, создаваемый токами ротора, равен крутящему моменту, необходимому на этой скорости для нагрузки, без избыточного крутящего момента, доступного для ускорения объединенной инерции нагрузки и двигателя.
Вращающееся поле и токи, которые оно создает в короткозамкнутых проводниках ротора.
Британская энциклопедия, Inc.Механическая выходная мощность должна обеспечиваться входной электрической мощностью. Первоначальных токов статора, показанных на рисунке, достаточно для создания вращающегося магнитного поля. Чтобы поддерживать это вращающееся поле в присутствии токов ротора, показанных на рисунке, необходимо, чтобы обмотки статора несли дополнительную составляющую синусоидального тока такой величины и фазы, чтобы нейтрализовать влияние магнитного поля, которое в противном случае могло бы возникнуть. токами ротора на рисунке.Общий ток статора в каждой фазной обмотке складывается из синусоидальной составляющей для создания магнитного поля и другой синусоиды, опережающей первую на четверть цикла, или 90 °, для обеспечения необходимой электроэнергии. Вторая, или силовая, составляющая тока находится в фазе с напряжением, приложенным к статору, в то время как первая, или намагничивающая, составляющая отстает от приложенного напряжения на четверть цикла или 90 °. При номинальной нагрузке эта намагничивающая составляющая обычно находится в диапазоне 0.От 4 до 0,6 величины силовой составляющей.
Большинство трехфазных асинхронных двигателей работают с обмотками статора, подключенными непосредственно к трехфазному источнику питания постоянного напряжения и постоянной частоты. Типичное напряжение питания находится в диапазоне от 230 вольт между фазами для двигателей относительно небольшой мощности (например, от 0,5 до 50 киловатт) до примерно 15 киловольт между фазами для двигателей большой мощности до примерно 10 мегаватт.
За исключением небольшого падения напряжения на сопротивлении обмотки статора, напряжение питания согласуется со скоростью изменения магнитного потока в статоре машины во времени.Таким образом, при питании с постоянной частотой и постоянным напряжением величина вращающегося магнитного поля остается постоянной, а крутящий момент примерно пропорционален силовой составляющей тока питания.
В асинхронном двигателе, показанном на предыдущих рисунках, магнитное поле совершает один оборот за каждый цикл частоты питания. Для источника с частотой 60 Гц скорость поля составляет 60 оборотов в секунду или 3600 оборотов в минуту. Скорость ротора меньше скорости поля на величину, достаточную для того, чтобы индуцировать необходимое напряжение в проводниках ротора для создания тока ротора, необходимого для момента нагрузки.При полной нагрузке скорость обычно на 0,5–5 процентов ниже полевой скорости (часто называемой синхронной скоростью), причем более высокий процент применяется к двигателям меньшего размера. Эта разница в скорости часто называется скольжением.
Другие синхронные скорости могут быть получены с источником постоянной частоты путем создания машины с большим количеством пар магнитных полюсов, в отличие от двухполюсной конструкции, показанной на рисунке. Возможные значения скорости магнитного поля в оборотах в минуту: 120 f / p , где f – частота в герцах (циклов в секунду), а p – количество полюсов (которое должно быть четное число).Данный железный каркас может быть намотан для любого из нескольких возможных количеств пар полюсов с помощью катушек, охватывающих угол приблизительно (360/ p ) °. Крутящий момент, доступный от рамы машины, останется неизменным, поскольку он пропорционален произведению магнитного поля и допустимого тока катушки. Таким образом, номинальная мощность рамы, являющаяся произведением крутящего момента и скорости, будет примерно обратно пропорциональна количеству пар полюсов. Наиболее распространенные синхронные скорости для двигателей с частотой 60 Гц – 1800 и 1200 оборотов в минуту.
